
搬送システムの復旧方法
【課題】搬送停止場所の近くから現況確認の結果とその後の運転の方法を指示することにより、搬送システムの復旧作業を容易にするとともに、搬送システムの維持にかかる人員を削減することができる搬送システムの復旧方法を提供すること。
【解決手段】複数機種の装置を相互にネットワークで接続した搬送システムにおいて、ある装置で搬送停止が起きた場合に、装置に直接接続された操作装置以外に、ネットワークを介して間接的に接続した操作端末装置により、装置の現況確認とその後の運転方法を入力する。
【解決手段】複数機種の装置を相互にネットワークで接続した搬送システムにおいて、ある装置で搬送停止が起きた場合に、装置に直接接続された操作装置以外に、ネットワークを介して間接的に接続した操作端末装置により、装置の現況確認とその後の運転方法を入力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、搬送システムの復旧方法に関し、特に、自動倉庫や有軌道搬送車、移載装置等の異なる機能を有する複数の装置で構成された搬送システムの復旧方法に関するものである。
【背景技術】
【0002】
例えば、搬送システムを構成する自動倉庫、有軌道搬送車、あるいは自動倉庫と搬送車の間に位置し搬送物の移送を行う移載コンベヤ装置は、それぞれ独立した制御装置を構成し、機能の異なる装置間での移載は、この装置から移載する相手装置に搬送物を受け渡しする際に、搬送物の積載位置の確認と、搬送物の有無の確認とを行い、相互でのインターロックを行いながら受け渡しを行う。
何らかの原因により搬送物の受け渡しが失敗した際には、内容が軽微で自動運転を再試行等により継続できる場合を除いて、自動運転を中断し、その状況をシステムの運転員が確認し、運転を継続するか、あるいは故障により運転を停止するなどの判断を行う。
そして、その判断の結果、その後の処理をこの装置の操作装置で入力し、運転を再開する。
【0003】
この場合、搬送物が大型化し、またクリーン度を維持するために、それぞれの装置をパーテーション(隔壁)で囲い、容易に状況が確認できない装置では、移載コンベヤが停止した場合、その状況確認のため、運転員が装置内部に進入し状況を確認することもある。
これらの装置では、停止した装置の操作装置は、状況確認を行う移載場所の直近にあるとは限らず、状況確認を行った後、操作装置のある場所まで移動して操作することになる。
また、現況を見ながら操作装置を操作することができず、復旧作業が2人作業になるなどの問題点もある。
【0004】
なお、従来技術として、下記の特許文献1に記載の搬送システムがあるが、この搬送システムは、ネットワークで結合した搬送システムで、情報制御を行うコンピュータが故障した場合に、情報制御を行う他のコンピュータで処理を代替するもので、搬送システムの運転員の作業を軽減したり、搬送システムの操作性を向上するために操作部分を代替したりするものではない。
【特許文献1】特開平7−232816号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
本発明は、上記従来の搬送システムの復旧方法が有する問題点に鑑み、搬送停止場所の近くから現況確認の結果とその後の運転の方法を指示することにより、搬送システムの復旧作業を容易にするとともに、搬送システムの維持にかかる人員を削減することができる搬送システムの復旧方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の搬送システムの復旧方法は、複数機種の装置を相互にネットワークで接続した搬送システムにおいて、ある装置で搬送停止が起きた場合に、該装置に直接接続された操作装置以外に、ネットワークを介して間接的に接続した操作端末装置により、該装置の現況確認とその後の運転方法を入力することを特徴とする。
【0007】
この場合において、自動倉庫制御装置の操作装置、搬送車統括制御装置の操作装置及び上位搬送制御装置の操作端末装置から選ばれたいずれかを操作端末装置として用いることができる。
【発明の効果】
【0008】
本発明の搬送システムの復旧方法によれば、複数機種の装置を相互にネットワークで接続した搬送システムにおいて、ある装置で搬送停止が起きた場合に、該装置に直接接続された操作装置以外に、ネットワークを介して間接的に接続した操作端末装置により、該装置の現況確認とその後の運転方法を入力することから、搬送停止場所の近くの操作端末装置により、現況を見ながら現況確認の結果とその後の運転方法を指示することができ、これにより、搬送システムの復旧作業を容易にするとともに、搬送システムの維持にかかる人員を削減することができる。
【0009】
また、自動倉庫制御装置の操作装置、搬送車統括制御装置の操作装置及び上位搬送制御装置の操作端末装置から選ばれたいずれかを操作端末装置として用いることにより、既存の設備を有効に利用し、操作端末装置の数を減じることができる。
【発明を実施するための最良の形態】
【0010】
以下、本発明の搬送システムの復旧方法の実施の形態を、図面に基づいて説明する。
【実施例1】
【0011】
図1に、本発明の復旧方法を適用する搬送システムの概略レイアウトを示す。
この搬送システムは、搬送物の保管・製造装置EQ1、EQ2、EQ3・・・への搬送物の供給を兼ねた複数の自動倉庫1が複数存在し、それぞれの自動倉庫1では、各々スタッカクレーン2が搬送物の搬送を行う。
スタッカクレーン2は、搬送物の処理する物量に応じて、通常1〜2台のスタッカクレーン2が自動倉庫1の中で稼動する。
また、各工程に対応する複数の自動倉庫1の間の搬送は、軌道7を走行する複数の搬送車8が周回し、搬送物を搬送する。
【0012】
搬送車8と自動倉庫1の搬送物の受け渡しは、搬入移載コンベヤ3や搬出移載コンベヤ4で搬送物を搬送車8からスタッカクレーン2に移載する。
また、搬送系にある搬送物を搬送系の外に搬出したり、搬送系の外にある搬送物を搬送系の中に搬入するための入出庫口コンベヤ5が、複数箇所の自動倉庫1に併設され、搬送系の外部とのインターフェースを行う。
それぞれの自動倉庫1には自動倉庫制御装置6が設けられるとともに、搬送車8には、搬送車統括制御装置9が設けられ、それぞれの搬送車制御装置8aを制御する(図2参照)。
【0013】
なお、搬入移載コンベヤ3は、搬送車8に載せられた搬送物を自動倉庫1のスタッカクレーン2が移載できる位置まで移送する装置であり、出入り、昇降機構を有している。
また、搬出移載コンベヤ4は、自動倉庫1のスタッカクレーン2が置いた搬送物を、搬送車8に載せる位置まで移送する装置であり、出入り、昇降機構を有している。
入出庫口コンベヤ5は、手動入出庫口で、搬送物を自動倉庫1から出庫、あるいは自動倉庫1に入庫する移載装置である。
【0014】
図2に、搬送システムの制御系の構成を示す。
自動倉庫制御装置6は、自動倉庫1内の在庫状況の参照や、作業スケジュールの参照、運転条件の設定などのために、キーボードやマウス、ディスプレイ等のパソコンと同様の操作装置6aを備えている。
【0015】
自動倉庫1の内部には、1台又は2台のスタッカクレーン制御装置2a、2bに作業の指示を与え、作業の報告を受信するための自動倉庫1のネットワーク15を配置する。
搬入搬出の移載コンベヤ制御装置3a、入出庫口コンベヤ制御装置5aもネットワーク15に接続し、自動倉庫制御装置6の指示に従い自動運転を行う。
正常な自動運転では、搬入搬出移載コンベヤ3、4や入出庫口コンベヤ5は、自動倉庫制御装置6の指示で動作するため、操作装置は必要ないが、移載中に発生する移載の際の搬送物の位置のずれや搬送物の状態確認のセンサ類の誤動作などの要因、あるいは故障などにより自動運転を停止した場合には、搬送物の状態表示や処理方法を指定するためのコンベヤ操作端末装置5bをネットワーク15に接続し、操作する。
【0016】
一方、搬送車統括制御装置9は、キーボードやマウス、ディスプレイ等のパソコンと同様の操作装置9aを有し、搬送車8のネットワーク16を介して、各搬送車8の各制御装置8aに、それぞれの搬送車8の指示を与える。
搬送車8の状態や作業の終了報告も、ネットワーク16を経由して搬送車統括制御装置9に報告する。
搬送車8は、その性格上有線通信は困難であり、電波による無線通信や、光通信などの媒体で無線通信を行う。
【0017】
搬送に関しての自動倉庫1への搬送の指示や、搬送車統括制御装置9への指示は、上位搬送制御装置(MCS(Material Control System))10から搬送系ネットワーク13を介して行う。
上位搬送制御装置10は、搬送系ネットワーク13に複数存在する自動倉庫制御装置6や、搬送車統括制御装置9に搬送の指示を出すコンピュータで、搬送システムの上位に位置する。
また、この上位搬送制御装置10は、その操作端末装置12a、12bが複数箇所に適宜配置される。
一方、上位搬送制御装置10に対しては、更にその上位に位置する生産管理コンピュータCIM(Computer lntegrated Manufacturing)11が、上位系のネットワーク14を介して指示を与える階層化した生産システムを構成し、搬送システムはその一部分を構成する。
【0018】
以上のような構成の搬送システムにおいて、搬送車8と自動倉庫1のスタッカクレーン2との間で、搬入又は搬出移載コンベヤ3、4で移載の失敗が発生した場合を想定する。
センサ類が一時的に誤動作する場合や、規定時間で動作が終了しない場合、通信が一時的に途切れた場合には、センサの状態確認やアクチュエータの動作確認、あるいは通信を再試行することで自動運転を継続できる場合を除いて、自動運転は、エラーになった状態を維持したまま運転を停止する。
【0019】
ところで、液晶カセットなどの搬送で、システム全体がクリーンルームの中に設置され、クリーン度に対する要求から各装置の間をパーテーションで仕切り、その区画ごとに空気の流れを管理するのは一般的に行われている。
【0020】
図3に模式的に示すように、スタッカクレーン2は自動倉庫1の内部に、搬入移載コンベヤ3も自動倉庫1の区画に設置されている。
軌道7を走行する搬送車8は移載するステーションに停止し、パーテーションの開口部分から搬入移載コンベヤ3が搬送車8に載った搬送物18をすくい上げ、スタッカクレーン2に移載する。
搬入移載コンベヤ3は、搬送車8が停止した後に、搬送車制御装置8aと光通信などの手段により移載のタイミングに関してインターロックをとり、搬送物18を搬送車8からすくい上げる。
【0021】
この際に、搬送車8の在荷は消失し、搬入移載コンベヤ3に在荷が発生する。
このインターロックの光通信の過程や在荷の消失、発生で矛盾が生じた場合、自動倉庫制御装置6は運転を継続できず、その状態を維持することになる。
自動運転を再開するためには、運転員が天井から吊り下げられた搬送車8の近傍までキャットウォークを歩いて出向き、目視により確認する場合(S1)、あるいは床上から目視で状態を確認する場合(S2)、あるいは自動倉庫1の中に入り、装置の状態を確認する場合(S3)などのケースが想定される。
【0022】
コンベヤ操作端末装置5bを自動倉庫の操作装置6aで兼用する従来の装置構成では、確認作業(S1)〜(S3)の後、運転員は自動倉庫の操作装置6aまで行き、そこで搬送物の状態の設定、作業の継続を指示する操作を行う(S4)。
これは1人の運転員がいろいろな場所まで移動しなければならず、迅速な自動運転の復旧には複数の人で手分けして作業を行うこともある。
しかしながら、確認を行う運転員と復旧操作する運転員との連携がとれていない場合、確認を行っている運転員が自動運転範囲から退避するまでに復旧操作が行われると、安全性が十分確保できない状態になり不測の事故が発生するおそれもある。
【0023】
コンベヤ操作端末装置5bは、従来、入出庫口コンベヤ制御装置5aにネットワーク15を経由せずに直接接続する構成が一般的であった。
移載装置の各軸を駆動するモータを単独で動かすジョグ運転などの操作で、機械の動きを見ながらゆっくり操作し、必要に応じて非常停止を操作するような運転では、移載コンベヤ制御装置3aあるいは入出庫口コンベヤ制御装置5aに直結された手動運転コンソールで操作するのは従来と同じである。
【0024】
しかしながら、移載するポートの番地を指定し、一連のシーケンスを実行するケースでは、移載装置の現在の状態の表示と、移載する目的のポートの番地の指定、在荷状態をどこのポートにあることにて運転を再開するか、あるいはポートの在荷を削除して運転を指定すればよく、コンベヤ操作端末装置5bは、前記移載装置の制御装置に直接接続していることは必須要件ではない。
図2のコンベヤ操作端末装置5bを更に詳しく見ると、構成は以下のようにすることができる。
【0025】
コンベヤ操作端末装置5bは、移載コンベヤ制御装置3aと、入出庫口コンベヤ制御装置5aに、自動倉庫制御装置6のネットワーク15を介して論理的に接続する。
論理的な接続とは、ネットワーク15にイーサネット(登録商標)のLANを使用している場合、自局のIPアドレスとポート番号、接続する相手装置となる移載コンベヤ制御装置3a、あるいは入出庫口コンベヤ制御装置5aのIPアドレスとポート番号を指定し、回線をオープンしセッションを確立し、通信を行う。一連の搬入移載コンベヤ3の操作が終了した後で回線をクローズするなどの一連のネットワークの操作を指す。
このTCP/IPのネットワーク操作はIETF(lnternet Engineehng Task Force)が管理、配布する文書のRFC793の規格書に決められた手順に従う。
コンベヤ操作端末装置5bは有線でネットワーク15に接続する。
【0026】
コンベヤ操作端末装置5bは、移載コンベヤ制御装置3aと、入出庫口コンベヤ制御装置5aに、図3の無線LANのアクセスポイント17を介し、ネットワーク15の一部を無線LANで構成したネットワークで接続する。
コンベヤ操作端末装置5bは、2.4GHzのIEEE802.11b規格の無線LANを装備したノートパソコンやPDA装置(Personal Data Assistance/携帯情報端末)を使用する。
なお、無線LANは、搬送系ネットワーク13や自動倉庫のネットワーク15に接続し、コンベヤ操作端末装置5bや上位搬送制御装置10の操作端末装置12a、12b等を論理的に上記ネットワークに接続する。
【0027】
コンベヤ操作端末装置5bは、他の自動倉庫のネットワーク15’に接続した移載コンベヤ制御装置3a’に接続する。コンベヤ操作端末装置5bは、既に説明した有線接続と無線接続とがある。
他の自動倉庫のネットワーク15’に接続する場合、すべての自動倉庫制御装置6、6’・・・のネットワーク15、15’・・・に接続するスタッカクレーン制御装置2b、2b’・・・、移載コンベヤ制御装置3a、3a’・・・、入出庫口コンベヤ制御装置5a、5a’・・・及びコンベヤ操作端末装置5bの各IPアドレスが、搬送系ネットワーク13の中で識別可能なユニークな値で、自動倉庫制御装置6、6’・・・が搬送系ネットワーク13のルーティング機能を持つ構成にする。
コンベヤ操作端末装置5bの送出したパケットは、自動倉庫制御装置6を経由し、搬送系ネットワーク13に送り出され、自動倉庫制御装置6’でそのパケットを中継し、移載コンベヤ制御装置3a’に届く。
このような構成では、無線LANのアクセスポイントは、自動倉庫内のネットワーク15、15’・・・に置くことだけでなく、搬送系ネットワーク13に置くこともできる。
また、無線LANのアクセスポイントは、一箇所以上の複数箇所において、最寄の電波の届くアクセスポイントと通信を行う。
【0028】
このように、コンベヤ操作端末装置5bを接続する機械装置を固定せずに、移動可能な操作端末装置で任意の移載装置と論理的に接続を行う手段を設けることで、搬送システムの一時的な停止に対する復旧作業を行う運転は、停止した装置の近傍の固定の操作端末装置から復旧操作を行うか、あるいは、可搬式のノートパソコンやPDAを持って停止した装置の見える場所に移動し、復旧作業を行う。
【0029】
また、これまで述べたような使い方をするコンベヤ操作端末装置5bは、独立した装置である必要性はなく、他の用途の操作端末装置、具体的には、例えば、自動倉庫制御装置の操作装置6a、6a’・・・、搬送車統括制御装置9の操作装置9a、あるいは上位搬送制御装置10の操作端末装置12a、12b等で兼用することができ、これにより、クリーンルーム内で搬送関係の操作端末装置の数を減らし、少ない数の操作端末装置で搬送システムを運用することができる。
【0030】
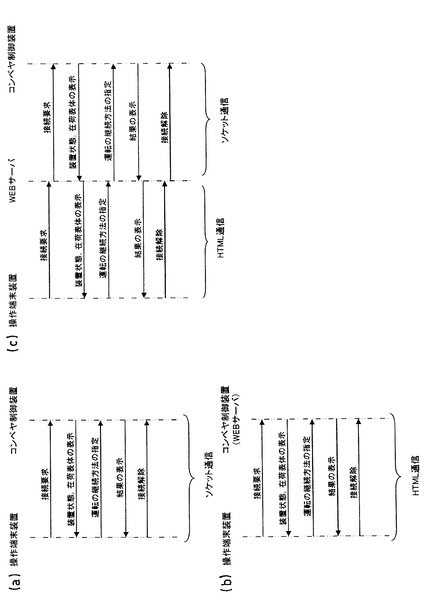
また、操作端末装置と移載コンベヤ制御装置のソフトウエアは、図4(a)に示すように、指令の電文フォーマット、状態報告の電文フォーマットを規定し、2つの装置間でネットワークのセッションを確立した後、電文フォーマットに従った電文をソケット通信で送受信し、操作端末装置は運転員に対する入力の画面、入力された値をチェックした後で、その内容を電文フォーマットに編集し送信するソフトウエア構成が一般的である。
制御装置にPLCを使用する場合、複雑な処理はPLC側で行わず、規定の書式に従った電文で指示を与えることで、PLCソフトウエアの処理負担を減らす。
【0031】
また、この方法とは別に、移載コンベヤ制御装置にWEBサーバ機能を持たせ、操作端末装置にはWEBクライアント機能だけを持たせる方法がある。
WEBクライアントは、汎用的なWindows(登録商標)パソコンに搭載されたインターネットエクスプローラ(米国マイクロソフト社製)を装備し、操作する対象となる移載コンベヤ制御装置のIPアドレスを指定し、この移載コンベヤ制御装置のWEBサーバにログインする。
WEBサーバで入力画面や入力のルールチェックを行い、HTML(Hyper Text Markup Language)を使用し、クライアントとなっている操作端末装置と通信を行う。
このような構成では、図4(b)に示すように、クライアント側は独自のプログラムを作成する必要がなく、パソコンやPDAの機種依存が少なく、また操作もクライアントの機種に依存しない操作を実現することができる。
【0032】
第3の方法は、図4(c)に示すように、WEBサーバを移載コンベヤ制御装置から独立して配置し、クライアントとなる操作端末装置とはHTMLで通信し、操作画面や入力のルールチェックはWEBサーバが行い、WEBサーバと移載コンベヤ制御装置とは、規定の電文フォーマットに従ってクライアントの操作端末装置から送られてきた内容を編集し送信するソフトウエア構成がある。
WEBサーバを搬送系のネットワーク16内に配置することで、移載コンベヤ制御装置のソフトウエアの複雑な処理の排除と、クライアントのソフトウエアの製作をなくすことの2つの方法の特徴を併せ持つシステムを構成することができる。
【0033】
以上、本発明の搬送システムの復旧方法について、その実施例に基づいて説明したが、本発明は上記実施例に記載した構成に限定されるものではなく、その趣旨を逸脱しない範囲において適宜その構成を変更することができる。
例えば、本発明の搬送システムの復旧方法は、液晶工場でのカセットや半導体工場でのカセット搬送に限定するものではなく、搬送と移載を繰り返す、複数機種の装置を組み合わせたシステムであれば適用が可能である。
【産業上の利用可能性】
【0034】
本発明の搬送システムの復旧方法は、搬送停止場所の近くから現況確認の結果とその後の運転の方法を指示することにより、搬送システムの復旧作業を容易にするとともに、搬送システムの維持にかかる人員を削減することができるという特性を有していることから、例えば、クリーンルーム内で稼動する液晶カセットの搬送システムのような大規模な自動化装置で、同一ベンダーで搬送関係を製作する場合には特に好適であり、システムの簡略化と操作性の向上に寄与する。
【図面の簡単な説明】
【0035】
【図1】本発明の搬送システムの復旧方法を適用する搬送システムの概略を示す平面図である。
【図2】同搬送システムの制御系の構成を示す図である。
【図3】搬送停止の復旧作業を模式的に示す図である。
【図4】(a)〜(c)は、操作端末装置と移載コンベヤ制御装置の通信の例をそれぞれ示す図である。
【符号の説明】
【0036】
1 自動倉庫
2 スタッカクレーン
2a スタッカクレーン制御装置
2b スタッカクレーン制御装置
3 搬入移載コンベヤ
3a 移載コンベヤ制御装置
4 搬出移載コンベヤ
5 入出庫口コンベヤ
5a 入出庫口コンベヤ制御装置
5b コンベヤ操作端末装置
6 自動倉庫制御装置
6a 操作装置
7 軌道
8 搬送車
8a 搬送車制御装置
9 搬送車統括制御装置
9a 操作装置
10 上位搬送制御装置
11 CIM
12a 上位搬送制御装置の操作端末装置
12b 上位搬送制御装置の操作端末装置
13 搬送系ネットワーク
14 上位系のネットワーク
15 自動倉庫のネットワーク
16 搬送車系ネットワーク
17 無線LANのアクセスポイント
18 搬送物
【技術分野】
【0001】
本発明は、搬送システムの復旧方法に関し、特に、自動倉庫や有軌道搬送車、移載装置等の異なる機能を有する複数の装置で構成された搬送システムの復旧方法に関するものである。
【背景技術】
【0002】
例えば、搬送システムを構成する自動倉庫、有軌道搬送車、あるいは自動倉庫と搬送車の間に位置し搬送物の移送を行う移載コンベヤ装置は、それぞれ独立した制御装置を構成し、機能の異なる装置間での移載は、この装置から移載する相手装置に搬送物を受け渡しする際に、搬送物の積載位置の確認と、搬送物の有無の確認とを行い、相互でのインターロックを行いながら受け渡しを行う。
何らかの原因により搬送物の受け渡しが失敗した際には、内容が軽微で自動運転を再試行等により継続できる場合を除いて、自動運転を中断し、その状況をシステムの運転員が確認し、運転を継続するか、あるいは故障により運転を停止するなどの判断を行う。
そして、その判断の結果、その後の処理をこの装置の操作装置で入力し、運転を再開する。
【0003】
この場合、搬送物が大型化し、またクリーン度を維持するために、それぞれの装置をパーテーション(隔壁)で囲い、容易に状況が確認できない装置では、移載コンベヤが停止した場合、その状況確認のため、運転員が装置内部に進入し状況を確認することもある。
これらの装置では、停止した装置の操作装置は、状況確認を行う移載場所の直近にあるとは限らず、状況確認を行った後、操作装置のある場所まで移動して操作することになる。
また、現況を見ながら操作装置を操作することができず、復旧作業が2人作業になるなどの問題点もある。
【0004】
なお、従来技術として、下記の特許文献1に記載の搬送システムがあるが、この搬送システムは、ネットワークで結合した搬送システムで、情報制御を行うコンピュータが故障した場合に、情報制御を行う他のコンピュータで処理を代替するもので、搬送システムの運転員の作業を軽減したり、搬送システムの操作性を向上するために操作部分を代替したりするものではない。
【特許文献1】特開平7−232816号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
本発明は、上記従来の搬送システムの復旧方法が有する問題点に鑑み、搬送停止場所の近くから現況確認の結果とその後の運転の方法を指示することにより、搬送システムの復旧作業を容易にするとともに、搬送システムの維持にかかる人員を削減することができる搬送システムの復旧方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の搬送システムの復旧方法は、複数機種の装置を相互にネットワークで接続した搬送システムにおいて、ある装置で搬送停止が起きた場合に、該装置に直接接続された操作装置以外に、ネットワークを介して間接的に接続した操作端末装置により、該装置の現況確認とその後の運転方法を入力することを特徴とする。
【0007】
この場合において、自動倉庫制御装置の操作装置、搬送車統括制御装置の操作装置及び上位搬送制御装置の操作端末装置から選ばれたいずれかを操作端末装置として用いることができる。
【発明の効果】
【0008】
本発明の搬送システムの復旧方法によれば、複数機種の装置を相互にネットワークで接続した搬送システムにおいて、ある装置で搬送停止が起きた場合に、該装置に直接接続された操作装置以外に、ネットワークを介して間接的に接続した操作端末装置により、該装置の現況確認とその後の運転方法を入力することから、搬送停止場所の近くの操作端末装置により、現況を見ながら現況確認の結果とその後の運転方法を指示することができ、これにより、搬送システムの復旧作業を容易にするとともに、搬送システムの維持にかかる人員を削減することができる。
【0009】
また、自動倉庫制御装置の操作装置、搬送車統括制御装置の操作装置及び上位搬送制御装置の操作端末装置から選ばれたいずれかを操作端末装置として用いることにより、既存の設備を有効に利用し、操作端末装置の数を減じることができる。
【発明を実施するための最良の形態】
【0010】
以下、本発明の搬送システムの復旧方法の実施の形態を、図面に基づいて説明する。
【実施例1】
【0011】
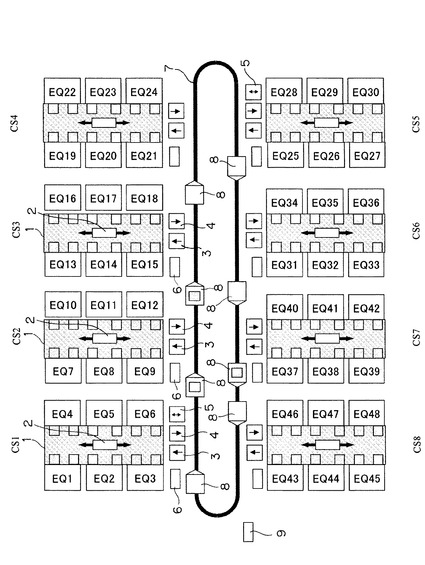
図1に、本発明の復旧方法を適用する搬送システムの概略レイアウトを示す。
この搬送システムは、搬送物の保管・製造装置EQ1、EQ2、EQ3・・・への搬送物の供給を兼ねた複数の自動倉庫1が複数存在し、それぞれの自動倉庫1では、各々スタッカクレーン2が搬送物の搬送を行う。
スタッカクレーン2は、搬送物の処理する物量に応じて、通常1〜2台のスタッカクレーン2が自動倉庫1の中で稼動する。
また、各工程に対応する複数の自動倉庫1の間の搬送は、軌道7を走行する複数の搬送車8が周回し、搬送物を搬送する。
【0012】
搬送車8と自動倉庫1の搬送物の受け渡しは、搬入移載コンベヤ3や搬出移載コンベヤ4で搬送物を搬送車8からスタッカクレーン2に移載する。
また、搬送系にある搬送物を搬送系の外に搬出したり、搬送系の外にある搬送物を搬送系の中に搬入するための入出庫口コンベヤ5が、複数箇所の自動倉庫1に併設され、搬送系の外部とのインターフェースを行う。
それぞれの自動倉庫1には自動倉庫制御装置6が設けられるとともに、搬送車8には、搬送車統括制御装置9が設けられ、それぞれの搬送車制御装置8aを制御する(図2参照)。
【0013】
なお、搬入移載コンベヤ3は、搬送車8に載せられた搬送物を自動倉庫1のスタッカクレーン2が移載できる位置まで移送する装置であり、出入り、昇降機構を有している。
また、搬出移載コンベヤ4は、自動倉庫1のスタッカクレーン2が置いた搬送物を、搬送車8に載せる位置まで移送する装置であり、出入り、昇降機構を有している。
入出庫口コンベヤ5は、手動入出庫口で、搬送物を自動倉庫1から出庫、あるいは自動倉庫1に入庫する移載装置である。
【0014】
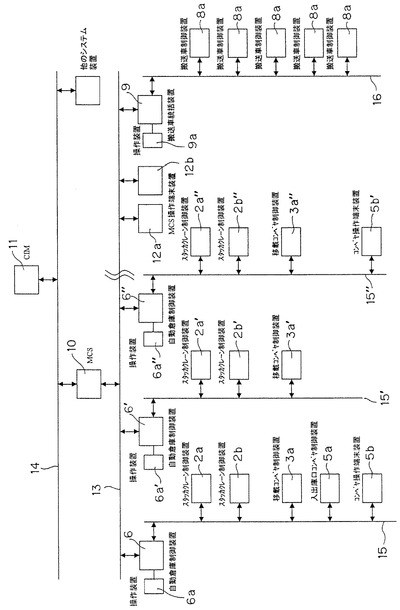
図2に、搬送システムの制御系の構成を示す。
自動倉庫制御装置6は、自動倉庫1内の在庫状況の参照や、作業スケジュールの参照、運転条件の設定などのために、キーボードやマウス、ディスプレイ等のパソコンと同様の操作装置6aを備えている。
【0015】
自動倉庫1の内部には、1台又は2台のスタッカクレーン制御装置2a、2bに作業の指示を与え、作業の報告を受信するための自動倉庫1のネットワーク15を配置する。
搬入搬出の移載コンベヤ制御装置3a、入出庫口コンベヤ制御装置5aもネットワーク15に接続し、自動倉庫制御装置6の指示に従い自動運転を行う。
正常な自動運転では、搬入搬出移載コンベヤ3、4や入出庫口コンベヤ5は、自動倉庫制御装置6の指示で動作するため、操作装置は必要ないが、移載中に発生する移載の際の搬送物の位置のずれや搬送物の状態確認のセンサ類の誤動作などの要因、あるいは故障などにより自動運転を停止した場合には、搬送物の状態表示や処理方法を指定するためのコンベヤ操作端末装置5bをネットワーク15に接続し、操作する。
【0016】
一方、搬送車統括制御装置9は、キーボードやマウス、ディスプレイ等のパソコンと同様の操作装置9aを有し、搬送車8のネットワーク16を介して、各搬送車8の各制御装置8aに、それぞれの搬送車8の指示を与える。
搬送車8の状態や作業の終了報告も、ネットワーク16を経由して搬送車統括制御装置9に報告する。
搬送車8は、その性格上有線通信は困難であり、電波による無線通信や、光通信などの媒体で無線通信を行う。
【0017】
搬送に関しての自動倉庫1への搬送の指示や、搬送車統括制御装置9への指示は、上位搬送制御装置(MCS(Material Control System))10から搬送系ネットワーク13を介して行う。
上位搬送制御装置10は、搬送系ネットワーク13に複数存在する自動倉庫制御装置6や、搬送車統括制御装置9に搬送の指示を出すコンピュータで、搬送システムの上位に位置する。
また、この上位搬送制御装置10は、その操作端末装置12a、12bが複数箇所に適宜配置される。
一方、上位搬送制御装置10に対しては、更にその上位に位置する生産管理コンピュータCIM(Computer lntegrated Manufacturing)11が、上位系のネットワーク14を介して指示を与える階層化した生産システムを構成し、搬送システムはその一部分を構成する。
【0018】
以上のような構成の搬送システムにおいて、搬送車8と自動倉庫1のスタッカクレーン2との間で、搬入又は搬出移載コンベヤ3、4で移載の失敗が発生した場合を想定する。
センサ類が一時的に誤動作する場合や、規定時間で動作が終了しない場合、通信が一時的に途切れた場合には、センサの状態確認やアクチュエータの動作確認、あるいは通信を再試行することで自動運転を継続できる場合を除いて、自動運転は、エラーになった状態を維持したまま運転を停止する。
【0019】
ところで、液晶カセットなどの搬送で、システム全体がクリーンルームの中に設置され、クリーン度に対する要求から各装置の間をパーテーションで仕切り、その区画ごとに空気の流れを管理するのは一般的に行われている。
【0020】
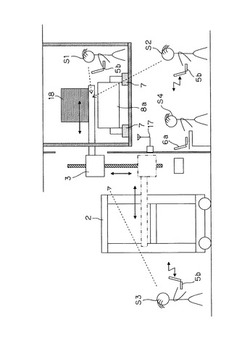
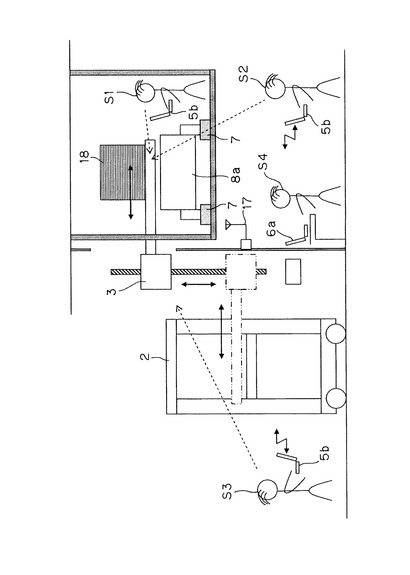
図3に模式的に示すように、スタッカクレーン2は自動倉庫1の内部に、搬入移載コンベヤ3も自動倉庫1の区画に設置されている。
軌道7を走行する搬送車8は移載するステーションに停止し、パーテーションの開口部分から搬入移載コンベヤ3が搬送車8に載った搬送物18をすくい上げ、スタッカクレーン2に移載する。
搬入移載コンベヤ3は、搬送車8が停止した後に、搬送車制御装置8aと光通信などの手段により移載のタイミングに関してインターロックをとり、搬送物18を搬送車8からすくい上げる。
【0021】
この際に、搬送車8の在荷は消失し、搬入移載コンベヤ3に在荷が発生する。
このインターロックの光通信の過程や在荷の消失、発生で矛盾が生じた場合、自動倉庫制御装置6は運転を継続できず、その状態を維持することになる。
自動運転を再開するためには、運転員が天井から吊り下げられた搬送車8の近傍までキャットウォークを歩いて出向き、目視により確認する場合(S1)、あるいは床上から目視で状態を確認する場合(S2)、あるいは自動倉庫1の中に入り、装置の状態を確認する場合(S3)などのケースが想定される。
【0022】
コンベヤ操作端末装置5bを自動倉庫の操作装置6aで兼用する従来の装置構成では、確認作業(S1)〜(S3)の後、運転員は自動倉庫の操作装置6aまで行き、そこで搬送物の状態の設定、作業の継続を指示する操作を行う(S4)。
これは1人の運転員がいろいろな場所まで移動しなければならず、迅速な自動運転の復旧には複数の人で手分けして作業を行うこともある。
しかしながら、確認を行う運転員と復旧操作する運転員との連携がとれていない場合、確認を行っている運転員が自動運転範囲から退避するまでに復旧操作が行われると、安全性が十分確保できない状態になり不測の事故が発生するおそれもある。
【0023】
コンベヤ操作端末装置5bは、従来、入出庫口コンベヤ制御装置5aにネットワーク15を経由せずに直接接続する構成が一般的であった。
移載装置の各軸を駆動するモータを単独で動かすジョグ運転などの操作で、機械の動きを見ながらゆっくり操作し、必要に応じて非常停止を操作するような運転では、移載コンベヤ制御装置3aあるいは入出庫口コンベヤ制御装置5aに直結された手動運転コンソールで操作するのは従来と同じである。
【0024】
しかしながら、移載するポートの番地を指定し、一連のシーケンスを実行するケースでは、移載装置の現在の状態の表示と、移載する目的のポートの番地の指定、在荷状態をどこのポートにあることにて運転を再開するか、あるいはポートの在荷を削除して運転を指定すればよく、コンベヤ操作端末装置5bは、前記移載装置の制御装置に直接接続していることは必須要件ではない。
図2のコンベヤ操作端末装置5bを更に詳しく見ると、構成は以下のようにすることができる。
【0025】
コンベヤ操作端末装置5bは、移載コンベヤ制御装置3aと、入出庫口コンベヤ制御装置5aに、自動倉庫制御装置6のネットワーク15を介して論理的に接続する。
論理的な接続とは、ネットワーク15にイーサネット(登録商標)のLANを使用している場合、自局のIPアドレスとポート番号、接続する相手装置となる移載コンベヤ制御装置3a、あるいは入出庫口コンベヤ制御装置5aのIPアドレスとポート番号を指定し、回線をオープンしセッションを確立し、通信を行う。一連の搬入移載コンベヤ3の操作が終了した後で回線をクローズするなどの一連のネットワークの操作を指す。
このTCP/IPのネットワーク操作はIETF(lnternet Engineehng Task Force)が管理、配布する文書のRFC793の規格書に決められた手順に従う。
コンベヤ操作端末装置5bは有線でネットワーク15に接続する。
【0026】
コンベヤ操作端末装置5bは、移載コンベヤ制御装置3aと、入出庫口コンベヤ制御装置5aに、図3の無線LANのアクセスポイント17を介し、ネットワーク15の一部を無線LANで構成したネットワークで接続する。
コンベヤ操作端末装置5bは、2.4GHzのIEEE802.11b規格の無線LANを装備したノートパソコンやPDA装置(Personal Data Assistance/携帯情報端末)を使用する。
なお、無線LANは、搬送系ネットワーク13や自動倉庫のネットワーク15に接続し、コンベヤ操作端末装置5bや上位搬送制御装置10の操作端末装置12a、12b等を論理的に上記ネットワークに接続する。
【0027】
コンベヤ操作端末装置5bは、他の自動倉庫のネットワーク15’に接続した移載コンベヤ制御装置3a’に接続する。コンベヤ操作端末装置5bは、既に説明した有線接続と無線接続とがある。
他の自動倉庫のネットワーク15’に接続する場合、すべての自動倉庫制御装置6、6’・・・のネットワーク15、15’・・・に接続するスタッカクレーン制御装置2b、2b’・・・、移載コンベヤ制御装置3a、3a’・・・、入出庫口コンベヤ制御装置5a、5a’・・・及びコンベヤ操作端末装置5bの各IPアドレスが、搬送系ネットワーク13の中で識別可能なユニークな値で、自動倉庫制御装置6、6’・・・が搬送系ネットワーク13のルーティング機能を持つ構成にする。
コンベヤ操作端末装置5bの送出したパケットは、自動倉庫制御装置6を経由し、搬送系ネットワーク13に送り出され、自動倉庫制御装置6’でそのパケットを中継し、移載コンベヤ制御装置3a’に届く。
このような構成では、無線LANのアクセスポイントは、自動倉庫内のネットワーク15、15’・・・に置くことだけでなく、搬送系ネットワーク13に置くこともできる。
また、無線LANのアクセスポイントは、一箇所以上の複数箇所において、最寄の電波の届くアクセスポイントと通信を行う。
【0028】
このように、コンベヤ操作端末装置5bを接続する機械装置を固定せずに、移動可能な操作端末装置で任意の移載装置と論理的に接続を行う手段を設けることで、搬送システムの一時的な停止に対する復旧作業を行う運転は、停止した装置の近傍の固定の操作端末装置から復旧操作を行うか、あるいは、可搬式のノートパソコンやPDAを持って停止した装置の見える場所に移動し、復旧作業を行う。
【0029】
また、これまで述べたような使い方をするコンベヤ操作端末装置5bは、独立した装置である必要性はなく、他の用途の操作端末装置、具体的には、例えば、自動倉庫制御装置の操作装置6a、6a’・・・、搬送車統括制御装置9の操作装置9a、あるいは上位搬送制御装置10の操作端末装置12a、12b等で兼用することができ、これにより、クリーンルーム内で搬送関係の操作端末装置の数を減らし、少ない数の操作端末装置で搬送システムを運用することができる。
【0030】
また、操作端末装置と移載コンベヤ制御装置のソフトウエアは、図4(a)に示すように、指令の電文フォーマット、状態報告の電文フォーマットを規定し、2つの装置間でネットワークのセッションを確立した後、電文フォーマットに従った電文をソケット通信で送受信し、操作端末装置は運転員に対する入力の画面、入力された値をチェックした後で、その内容を電文フォーマットに編集し送信するソフトウエア構成が一般的である。
制御装置にPLCを使用する場合、複雑な処理はPLC側で行わず、規定の書式に従った電文で指示を与えることで、PLCソフトウエアの処理負担を減らす。
【0031】
また、この方法とは別に、移載コンベヤ制御装置にWEBサーバ機能を持たせ、操作端末装置にはWEBクライアント機能だけを持たせる方法がある。
WEBクライアントは、汎用的なWindows(登録商標)パソコンに搭載されたインターネットエクスプローラ(米国マイクロソフト社製)を装備し、操作する対象となる移載コンベヤ制御装置のIPアドレスを指定し、この移載コンベヤ制御装置のWEBサーバにログインする。
WEBサーバで入力画面や入力のルールチェックを行い、HTML(Hyper Text Markup Language)を使用し、クライアントとなっている操作端末装置と通信を行う。
このような構成では、図4(b)に示すように、クライアント側は独自のプログラムを作成する必要がなく、パソコンやPDAの機種依存が少なく、また操作もクライアントの機種に依存しない操作を実現することができる。
【0032】
第3の方法は、図4(c)に示すように、WEBサーバを移載コンベヤ制御装置から独立して配置し、クライアントとなる操作端末装置とはHTMLで通信し、操作画面や入力のルールチェックはWEBサーバが行い、WEBサーバと移載コンベヤ制御装置とは、規定の電文フォーマットに従ってクライアントの操作端末装置から送られてきた内容を編集し送信するソフトウエア構成がある。
WEBサーバを搬送系のネットワーク16内に配置することで、移載コンベヤ制御装置のソフトウエアの複雑な処理の排除と、クライアントのソフトウエアの製作をなくすことの2つの方法の特徴を併せ持つシステムを構成することができる。
【0033】
以上、本発明の搬送システムの復旧方法について、その実施例に基づいて説明したが、本発明は上記実施例に記載した構成に限定されるものではなく、その趣旨を逸脱しない範囲において適宜その構成を変更することができる。
例えば、本発明の搬送システムの復旧方法は、液晶工場でのカセットや半導体工場でのカセット搬送に限定するものではなく、搬送と移載を繰り返す、複数機種の装置を組み合わせたシステムであれば適用が可能である。
【産業上の利用可能性】
【0034】
本発明の搬送システムの復旧方法は、搬送停止場所の近くから現況確認の結果とその後の運転の方法を指示することにより、搬送システムの復旧作業を容易にするとともに、搬送システムの維持にかかる人員を削減することができるという特性を有していることから、例えば、クリーンルーム内で稼動する液晶カセットの搬送システムのような大規模な自動化装置で、同一ベンダーで搬送関係を製作する場合には特に好適であり、システムの簡略化と操作性の向上に寄与する。
【図面の簡単な説明】
【0035】
【図1】本発明の搬送システムの復旧方法を適用する搬送システムの概略を示す平面図である。
【図2】同搬送システムの制御系の構成を示す図である。
【図3】搬送停止の復旧作業を模式的に示す図である。
【図4】(a)〜(c)は、操作端末装置と移載コンベヤ制御装置の通信の例をそれぞれ示す図である。
【符号の説明】
【0036】
1 自動倉庫
2 スタッカクレーン
2a スタッカクレーン制御装置
2b スタッカクレーン制御装置
3 搬入移載コンベヤ
3a 移載コンベヤ制御装置
4 搬出移載コンベヤ
5 入出庫口コンベヤ
5a 入出庫口コンベヤ制御装置
5b コンベヤ操作端末装置
6 自動倉庫制御装置
6a 操作装置
7 軌道
8 搬送車
8a 搬送車制御装置
9 搬送車統括制御装置
9a 操作装置
10 上位搬送制御装置
11 CIM
12a 上位搬送制御装置の操作端末装置
12b 上位搬送制御装置の操作端末装置
13 搬送系ネットワーク
14 上位系のネットワーク
15 自動倉庫のネットワーク
16 搬送車系ネットワーク
17 無線LANのアクセスポイント
18 搬送物
【特許請求の範囲】
【請求項1】
複数機種の装置を相互にネットワークで接続した搬送システムにおいて、ある装置で搬送停止が起きた場合に、該装置に直接接続された操作装置以外に、ネットワークを介して間接的に接続した操作端末装置により、該装置の現況確認とその後の運転方法を入力することを特徴とする搬送システムの復旧方法。
【請求項2】
自動倉庫制御装置の操作装置、搬送車統括制御装置の操作装置及び上位搬送制御装置の操作端末装置から選ばれたいずれかを操作端末装置として用いることを特徴とする請求項1記載の搬送システムの復旧方法。
【請求項1】
複数機種の装置を相互にネットワークで接続した搬送システムにおいて、ある装置で搬送停止が起きた場合に、該装置に直接接続された操作装置以外に、ネットワークを介して間接的に接続した操作端末装置により、該装置の現況確認とその後の運転方法を入力することを特徴とする搬送システムの復旧方法。
【請求項2】
自動倉庫制御装置の操作装置、搬送車統括制御装置の操作装置及び上位搬送制御装置の操作端末装置から選ばれたいずれかを操作端末装置として用いることを特徴とする請求項1記載の搬送システムの復旧方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2010−58919(P2010−58919A)
【公開日】平成22年3月18日(2010.3.18)
【国際特許分類】
【出願番号】特願2008−227278(P2008−227278)
【出願日】平成20年9月4日(2008.9.4)
【出願人】(000005452)株式会社日立プラントテクノロジー (1,767)
【Fターム(参考)】
【公開日】平成22年3月18日(2010.3.18)
【国際特許分類】
【出願日】平成20年9月4日(2008.9.4)
【出願人】(000005452)株式会社日立プラントテクノロジー (1,767)
【Fターム(参考)】
[ Back to top ]