
搬送システム及び搬送車
【課題】例えば半導体装置製造用の各種基板等が収容された容器等の被搬送物を、合流箇所を含む軌道上で搬送する搬送システムにおいて、搬送車同士の衝突を防止しつつ、搬送車を効率良く稼働する。
【解決手段】搬送システム(100)は、軌道(1)と、複数の搬送車(3)と、軌道上における合流箇所を含む所定範囲内へ、複数の搬送車のうち一の搬送車が軌道の一部を介して進入した場合に、所定範囲内へ、複数の搬送車のうち他の搬送車が軌道の他部を介して進入することを禁止する旨の進入禁止信号を出力する進入制御手段(7,9)とを備える。進入制御手段は、進入禁止信号が出力されている際に前記一の搬送車で停止を伴う故障が発生した場合に、一の搬送車の停止位置を基準として他の搬送車が一の搬送車に衝突するか否かを判定し、他の搬送車が衝突しないと判定されると、進入禁止信号を解除する。
【解決手段】搬送システム(100)は、軌道(1)と、複数の搬送車(3)と、軌道上における合流箇所を含む所定範囲内へ、複数の搬送車のうち一の搬送車が軌道の一部を介して進入した場合に、所定範囲内へ、複数の搬送車のうち他の搬送車が軌道の他部を介して進入することを禁止する旨の進入禁止信号を出力する進入制御手段(7,9)とを備える。進入制御手段は、進入禁止信号が出力されている際に前記一の搬送車で停止を伴う故障が発生した場合に、一の搬送車の停止位置を基準として他の搬送車が一の搬送車に衝突するか否かを判定し、他の搬送車が衝突しないと判定されると、進入禁止信号を解除する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば半導体装置製造用の各種基板等が収容された容器等の被搬送物を、合流箇所を含む軌道上で搬送する搬送システム及び搬送車の技術分野に関する。
【背景技術】
【0002】
この種の搬送システムとして、例えば交差エリアに本線軌道及び支線軌道が属する場合に、本線軌道上を交差点に向かって走行する搬送車に対し、支線軌道上に搬送車がないことを告知する複数の投光器を備え、交差エリアにおける搬送車同士の衝突を防止するものがある(特許文献1参照)。
【0003】
この種の搬送システムに係る技術として、例えばカーブを走行する場合に、前輪を速度制御し、後輪をトルク制御することによって、搬送車をカーブにおいて高速で走行させる走行制御方法がある(特許文献2参照)。
【0004】
【特許文献1】特開2006−48333号公報
【特許文献2】特開2004−94417号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した特許文献1によれば、交差点毎に複数の投光器を設けるために、搬送システムが高コストに構成されてしまう。また、交差点毎に複数の投光器を設置するためのスペースを確保しなければならず、搬送装置が大型化してしまうという技術的問題点がある。
【0006】
また、上述した特許文献2の走行制御方法等で、一の搬送車が、交差点等の合流部に繋がるカーブを高速走行する場合に、脱輪等が生じて、一の搬送車が一の軌道における合流部やその近傍に停止してしまうことがある。このような事態に、該合流部に合流される他の軌道を走行する他の搬送車が、停止状態の一の搬送車に衝突するのを防止するために、例えば、他の軌道から合流部への進入が禁止される。これでは、例えば、該合流部に掛らない、該合流部の近傍に一の搬送車が停止している場合に、一の搬送車が邪魔にならず、他の搬送車が合流部を通過可能であるにも関わらず、他の軌道について進入禁止の状態が継続されてしまうという問題点がある。
【0007】
本発明は、例えば上述した問題点に鑑みなされたものであり、搬送車同士の衝突を防止しつつ、搬送車を効率良く稼働可能な搬送システム及び該搬送システムに適用される搬送車を提供することを課題とする。
【課題を解決するための手段】
【0008】
本発明の搬送システムは上記課題を解決するために、合流箇所を有する軌道と、該軌道上を夫々走行可能であると共に被搬送物を夫々搬送可能な複数の搬送車と、前記軌道上における前記合流箇所を含む所定範囲内へ、前記複数の搬送車のうち一の搬送車が前記軌道の一部を介して進入した場合に、前記所定範囲内へ、前記複数の搬送車のうち他の搬送車が前記軌道の他部を介して進入することを禁止する旨の進入禁止信号を出力する進入制御手段とを備え、前記進入制御手段は、前記進入禁止信号が出力されている際に前記一の搬送車で停止を伴う故障が発生した場合に、前記一の搬送車の停止位置を基準として前記他の搬送車が前記一の搬送車に衝突するか否かを判定し、前記他の搬送車が衝突しないと判定された場合に、前記進入禁止信号を解除する。
【0009】
本発明の搬送システムによれば、その動作時には、例えば天井に敷設されたレール等の軌道上を走行する、例えばビークル、OHT(Overhead Hoist Transport)等の搬送車によって、例えばFOUP(Front Opening Unified Pod)等の荷或いは被搬送物は搬送される。この際、一の搬送車が軌道上における合流箇所を含む所定範囲内へ、軌道の一部を介して進入した場合には、この所定範囲内へ、軌道の他部を介して進入することを禁止する旨の進入禁止信号が、例えばコントローラ、メモリ等を含んでなる進入制御手段から出力される。すると、出力された進入禁止信号に応じて、他の搬送車を停止させれば、他の搬送車が、合流箇所を含む所定範囲内で、一の搬送車に後方や側方から衝突することを避けられる。
【0010】
このような動作中、一の搬送車が所定範囲内で、故障して停止してしまう場合や、故障が検出されたために強制的に走行を停止させたりする場合がある。ここに「所定範囲」は、上述の通り進入禁止信号を出力すべき範囲(言い換えれば「進入禁止信号出力用の範囲」)である。
【0011】
このような「所定範囲」即ち、通常走行時における進入禁止信号出力用の範囲は、二つの搬送車(即ち、ここでの一の搬送車及び他の搬送車)が夫々通常走行している場合に、二つの搬送車間の衝突を避ける範囲であるので、二つの搬送車が走行していることが大前提で設定される。より具体的には、二つの搬送車の夫々についての、停止までに係る制動距離や、減速に必要な距離或いは時間、安全マージンや制動誤差等を考慮した上で、同時走行に係る二つの搬送車間における衝突を確実に避ける範囲として設定される。このため、所定範囲は、二つの搬送車の通常走行を大前提とするというその性質上、一方の搬送車が所定範囲内のいずれかの停止位置に故障で停止した場合における、一の搬送車に他の搬送車が実際に衝突する範囲(以下適宜「合流領域」と称する)とは、一致しない。即ち、停止位置が所定範囲内のいずれの位置になるかに応じて、実際に衝突するのかしないのかは分かれる。しかも、搬送車が高速走行する程、進入禁止信号の出力、送受信、処理時間等までも含めた他の搬送車における制動距離が長くなるので、これら所定範囲と合流領域の不一致の度合いは高くなる。いずれにせよ、これら所定範囲と合流領域が一致することはない。
【0012】
ここで特に、所定範囲内で一の搬送車が故障で停止した場合であっても、一の搬送車の停止位置が、運よく他の搬送車が合流箇所を通過可能である停止位置である場合(言い換えれば、合流領域には入っていない場合)について考える。この場合、仮に何らの手当てもしなければ、進入禁止信号が出力された後に変化はない。このため、例えば、他の搬送車は停止されたままとなる。或いは、他の搬送車については合流箇所を避けた走行経路の設定が行われたままとなる。
【0013】
しかるに本発明によれば、進入禁止信号が出力されている際に一の搬送車で停止を伴う故障が発生した場合、進入制御手段によって、一の搬送車の停止位置を基準として他の搬送車が一の搬送車に衝突するか否かが判定され、この判定の結果として、他の搬送車が一の搬送車に衝突しないと判定されれば、進入禁止信号は解除される。よって、この場合には、他の搬送車は、停止されたままとされることはなく、合流箇所を通過できる。或いは、他の搬送車の走行経路の設定について、合流箇所を避けたものに変更する必要も無い。即ち、一の搬送車が故障で停止してしまっても、搬送システムとしての搬送効率が下がるのを極めて効率的に低減でき、特に一の搬送車の修理や手当てが完了するまでの間ずっと他の搬送車を停止させ続ける或いは合流箇所を通過不可能としてしまうことと比較した場合における、相対的な搬送効率の上昇は極めて顕著である。
【0014】
以上の結果、本発明の搬送システムによれば、搬送車同士の衝突を防止しつつ、搬送車を効率良く稼働可能となる。
【0015】
本発明の搬送システムの一態様では、前記故障が発生した場合に、前記停止位置を特定する位置特定手段を更に備え、前記進入制御手段は、前記特定された停止位置を基準として前記他の搬送車が衝突するか否かを判定する。
【0016】
この態様によれば、停止を伴う故障が発生した場合に、例えばエンコーダ、バーコードリーダ、プロセッサ等を含んでなる位置特定手段によって、停止位置が特定される。尚、位置特定手段は、故障が検出された場合に限らず、定期的、不定期的若しくは常時に又は何らかのトリガを受けて、停止位置を特定してもよい。すると、進入制御手段によって、このように特定された停止位置を基準として、他の搬送車が衝突するか否かが判定される。よって、より確実に、進入禁止信号の解除(或いは否解除)を行える。
【0017】
この態様では、前記軌道上における所定の軌道位置を付けられた識別マークと、前記一の搬送車が前記所定の軌道位置を通過する際に、前記識別マークを検出するマーク検出手段とを更に備え、前記位置特定手段は、前記検出された識別マークに基づいて、前記停止位置を特定してもよい。
【0018】
このように構成すれば、一の搬送車が所定の軌道位置(例えば、所定範囲の開始位置など)を通過すると、この軌道位置に付けられた、例えばバーコード等の識別マークが、例えばバーコードリーダ等のマーク検出手段によって検出される。すると、位置特定手段によって、このように検出された識別マークに基づいて、停止位置が特定される。よって、比較的容易にして迅速且つ確実に、停止位置を特定することが可能となる。
【0019】
この場合更に、前記位置特定手段は、前記所定の軌道位置を基準とする前記軌道上に沿った距離を、検出することで、前記停止位置を検出する位置検出手段を有するように構成してもよい。
【0020】
このように構成すれば、例えばエンコーダ等の位置検出手段によって、所定の軌道位置を基準とする軌道に沿った距離が検出され、この距離(即ち、識別マークが付された位置からの走行距離)から停止位置が検出される。よって、より正確に停止位置を特定することが可能となる。
【0021】
上述した位置特定手段を備える態様では、前記故障が発生した場合に、前記位置特定手段に異常があるか否かを判定する異常判定手段を更に備え、前記進入制御手段は、前記異常があると判定されないことを条件に、前記他の搬送車が衝突するか否かを判定する、又は前記他の搬送車が衝突しないと判定された場合に前記進入禁止信号を解除するように構成してもよい。
【0022】
このように構成すれば、一の搬送車について故障が発生した場合に、例えばプロセッサ、メモリ等を含んでなる異常判定手段によって、位置特定手段に異常があるか否かが判定される。尚、異常判定手段は、故障が検出された場合に限らず、定期的、不定期的若しくは常時に又は何らかのトリガを受けて、位置特定手段に異常があるか否かを判定してもよい。続いて、この判定の結果として異常があると判定されないことを条件に、進入制御手段によって、他の搬送車が衝突するか否かが判定されるか、又は他の搬送車が衝突しないと判定された場合に進入禁止信号が解除される。従って、故障によって停止位置の特定までも怪しい場合に、進入禁止信号が解除されることで衝突を引き起こしてしまう事態の発生を防げる。
【0023】
本発明の搬送システムの他の態様では、前記進入制御手段は、前記合流箇所を含むと共に前記所定範囲よりも小さく且つ前記一の搬送車が停止していると前記他の搬送車が前記一の搬送車に衝突する範囲として、予め設定されている合流領域内に、前記停止位置が入っているか否かにより、前記他の搬送車が衝突するか否かを判定する。
【0024】
この態様によれば、合流箇所を含むと共に前記所定範囲よりも小さく且つ一の搬送車が停止していると他の搬送車が一の搬送車に衝突する範囲として、合流領域が予め設定されている。その後、一の搬送車について停止を伴う故障が発生した場合には、進入制御手段によって、このように設定された合流領域内に、前記停止位置が入っているか否かにより、前記他の搬送車が衝突するか否かを判定する。従って、故障が検出された場合における他の搬送車が衝突するか否かの判定を、迅速に行うことが可能となる。
【0025】
この態様では、前記合流領域を示す領域情報を、前記合流箇所並びに前記所定範囲若しくは前記合流領域に含まれる前記軌道上における軌道位置の少なくとも一方に対応付ける形で格納する記憶手段を更に備え、前記進入制御手段は、前記停止位置に対応する前記少なくとも一方に対応付けられた前記領域情報を取得し、前記取得された領域情報により示される前記合流領域内に、前記停止位置が入っているか否かにより、前記他の搬送車が衝突するか否かを判定するように構成してもよい。
【0026】
このように構成すれば、例えばテーブルが内部に構築されたメモリ等の記憶手段を参照することで、一の搬送車について故障が発生した場合における他の搬送車が衝突するか否かの判定を、より一層迅速に行うことが可能となる。
【0027】
本発明の搬送システムの他の態様では、前記進入制御手段は、少なくとも部分的に、前記搬送車に搭載されている。
【0028】
この態様によれば、各搬送車に搭載された進入制御手段の部分又は全部によって、進入禁止信号の出力及び解除を、確実に行うことが可能となる。
【0029】
本発明の搬送システムの他の態様では、前記進入制御手段は、前記進入禁止信号を前記一の搬送車側から発信し、前記他の搬送車側は、前記進入禁止信号を受信すると、停止するように構成されている。
【0030】
この態様によれば、進入禁止信号を搬送車間で送受信することで、複数の搬送車が多数ある場合にも、進入禁止に関する制御を効率的に且つ確実に行うことが可能となる。
【0031】
本発明の搬送システムの他の態様では、前記進入禁止信号が出力された場合に、前記他の搬送車の前記軌道上における走行経路を、前記合流箇所を迂回するものに変更する経路変更手段を更に備える。
【0032】
この態様によれば、進入禁止信号が出力された場合、他の搬送車を停止させるのではなく、例えばプロセッサ、メモリ等を含んでなる経路変更手段によって、合流箇所を迂回させるので、全体の搬送効率のアップに繋がる。
【0033】
上述の合流領域を用いた態様では、前記他の搬送車が衝突すると判定された場合に、前記他の搬送車の前記軌道上における走行経路を、前記合流箇所を迂回するものに変更する経路変更手段を更に備えてもよい。
【0034】
このように構成すれば、進入禁止信号が解除されない場合、他の搬送車を停止させるのではなく、例えばプロセッサ、メモリ等を含んでなる経路変更手段によって、合流箇所を迂回させるので、全体の搬送効率のアップに繋がる。
【0035】
本発明の搬送車は上記課題を解決するために、合流箇所を有する軌道上を走行可能であると共に被搬送物を搬送可能な搬送車であって、前記軌道上における前記合流箇所を含む所定範囲内へ、前記軌道の一部を介して進入した場合に、前記所定範囲内へ、他の搬送車が前記軌道の他部を介して進入することを禁止する旨の進入禁止信号を出力する進入制御手段を備え、前記進入制御手段は、前記進入禁止信号が出力されている際に前記一の搬送車で停止を伴う故障が発生した場合に、当該搬送車の停止位置を基準として前記他の搬送車が当該搬送車に衝突するか否かを判定し、前記他の搬送車が衝突しないと判定された場合に、前記進入禁止信号を解除する。
【0036】
本発明の搬送車によれば、上述した本発明の搬送システムの場合と同様に、搬送車同士の衝突を防止しつつ、搬送車を効率良く稼働可能となる。
【0037】
尚、本発明の搬送車においては、上述した本発明の搬送システムの場合と同様の各種態様を採用可能である。
【0038】
本発明の作用及び他の利得は次に説明する実施するための最良の形態から明らかにされる。
【発明を実施するための最良の形態】
【0039】
以下、本発明の実施形態について図を参照しつつ説明する。
【0040】
先ず、実施形態に係る搬送システムの構成について説明する。ここに図1は、実施形態に係る複数の軌道及び複数の搬送車の一状態を模式的に示し、図2は、図1の軌道及び複数の搬送車の他の状態を模式的に示し、図3は、図1の各搬送車の構成を機能的に示す。
【0041】
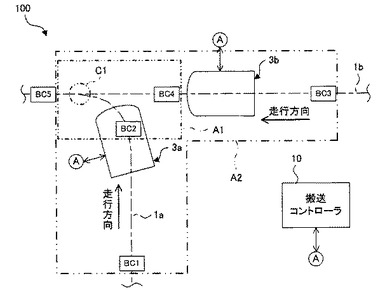
図1において、本実施形態に係る搬送システム100は、軌道1、ビークル3、及び搬送コントローラ10を備える。軌道1は、二つの支軌道1a及び1b、並びにこれら二つの支軌道1a及び1bを合流箇所C1で合流する合流軌道1cを含む。本実施形態では特に、本発明に係る「所定範囲」の一例として、合流箇所C1の前後に広がる信号発信領域A2が設定され、更に、この中に合流領域A1が設定されている。
【0042】
「信号発信領域A2」は、そこにビークル3a及び3bの一方が先に侵入した場合に、一方が信号発信領域A2内にある限り原則として(即ち、後述の強制的な解除がない限り)、他方に対して信号発信領域A2に侵入することを禁止する旨の進入禁止信号を発信し続ける領域である。更に、このように一方から送信された進入禁止信号を他方が受信する領域でもある。
【0043】
より具体的には、支軌道1a側のビークル3aが信号発信領域A2に存在している間中(即ち、信号発信領域A2内を走行中又は信号発信領域A2内に停止中)、支軌道1a側のビークル3aから支軌道1b側のビークル3bに対して、例えば進入禁止信号がハイレベルとされて発信され、特に後述の如く故障後における強制解除が実行されない限り、ハイレベルとされた進入禁止信号の発信が継続される。逆に、支軌道1b側のビークル3bが信号発信領域A2に存在している間中(即ち、信号発信領域A2内を走行中又は信号発信領域A2内に停止中)、支軌道1b側のビークル3bから支軌道1a側のビークル3aに対して、例えば進入禁止信号がハイレベルとされて発信され、特に後述の如く故障後における強制解除が実行されない限り、ハイレベルとされた進入禁止信号の発信が継続される。
【0044】
尚、ビークル3a又は3bが信号発信領域A2に進入して、進入禁止信号の発信を開始する位置を、以下「発信開始位置」と称し、信号発信領域A2を脱出して、進入禁止信号の発信を停止する位置を、以下「発信解除位置」と称する。信号発信領域A2は、支軌道1a又は支軌道1bにおける発信開始位置で始まり、合流箇所C1後における発信解除位置で終わる。
【0045】
これに対して「合流領域A1」は、支軌道1a上を走行するビークル3aが合流箇所C1を通過する際に、故障により停止してしまっている場合に、仮に支軌道1b上を走行するビークル3bが進入すると、この停止しているビークル3aに後方又は側方から衝突してしまう領域、言い換えれば、ビークル3aが停止していると、ビークル3bが物理的に通行できない領域を意味する。或いは、合流領域A1は、支軌道1b上を走行するビークル3bが合流箇所C1を通過する際に、故障により停止してしまっている場合に、仮に支軌道1a上を走行するビークル3aが進入すると、この停止しているビークル3bに後方又は側方から衝突してしまう領域、言い換えれば、ビークル3bが停止していると、ビークル3aが物理的に通行できない領域を意味する。
【0046】
軌道1には、複数のバーコードBC1〜BC5が付けられている。各バーコードは、本発明に係る「識別マーク」の一例として、軌道1上における軌道位置を示す。支軌道1a側のビークル3aについて、バーコードBC1が発信開始位置を示し、バーコードBC2が合流領域A1の始点を示す。支軌道1b側のビークル3bについて、バーコードBC3が発信開始位置を示し、バーコードBC4が合流領域A1の始点を示す。合流軌道1c上のビークル3a,3bについて、バーコードBC5が発信解除位置を示す。このようなバーコードBC1〜BC5の情報は、ビークル3の制御に次のように使用される。
【0047】
即ち、バーコードBC1が参照されることで、ビークル3aによって、自身が信号発信領域A2内に侵入したことが認識され、進入禁止信号が発信される。すると他方で、バーコードBC3が参照されることで、ビークル3bによって、自身が信号発信領域A2内に侵入したことが認識され、進入禁止信号の受信が開始される。尚、受信については、自身が信号発信領域A2内に侵入したか否かと無関係に或いはバーコードBC3と無関係に、常時行われてもよい。この場合、ビークル3bは、ビークル3aからの進入禁止信号を受けて、合流領域A1の手前で停止される。即ち、ビークル3bでは、自身の信号発信領域A2内への侵入が認識されるものの、ビークル3aからの進入禁止信号の受信が開始される。この場合、ビークル3bは、ビークル3aからの進入禁止信号を受けて、合流領域A1の手前で停止されるか、合流領域A1の手前で即時停止可能な速度まで減速される。その後、進入禁止信号の解除が行われると、ビークル3bでは走行再開されたり加速されたりする。或いは、後述の如く故障時における進入禁止信号の解除が迅速に行われると、ビークル3bでは、殆ど又は全く減速することなく合流箇所C1を通過してもよい。停止或いは減速から走行再開又は加速までの損失を最小限に抑える観点から、ビークル3bは、バーコードBC4で示される合流領域A1の始点に近接した位置で進んでから停止されるのがよい。
【0048】
図1の状態において、ビークル3aが正常であれば、支軌道1b上のビークル3bに対して進入禁止信号が発信された後に、支軌道1a側のビークル3aがバーコードBC5を超えた場合に、ビークル3bに対して、進入禁止信号が解除される。例えば、ハイレベルとされていた進入禁止信号がローレベルとされる。この進入禁止信号の解除により、ビークル3bは、合流領域A1に進入可能になる。これと同時に或いは相前後して、今度は、信号発信領域A2内に侵入したビークル3bから、支軌道1a側に次に来るかもしれないビークル3aに対して、進入禁止信号が発信される。
【0049】
他方、図2に示すように、ビークル3aよりもビークル3bが先に信号発信領域A2内に侵入した場合にも同様に、ビークル3aが信号発信領域A2内で、バーコードBC2より手前で停止又は減速され、ビークル3bの通過後に、信号発信領域A2内へ進入する。或いは、進入禁止信号の受信や解除に応じて、停止されたり、走行再開されたりする。
【0050】
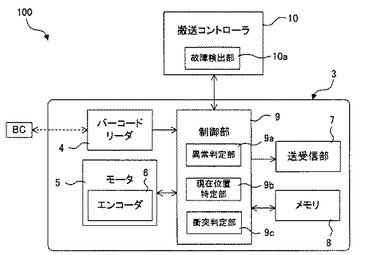
図3において、ビークル3は、本実施形態に係る「搬送車」の一例として、バーコードリーダ4、モータ5、エンコーダ6、送受信部7、メモリ8、及び制御部9を備える。ビークル3は、軌道1に沿って走行すると共に、不図示の製造装置やストッカにFOUPを搬送する。ビークル3の底面には、バーコードリーダ4が取り付けられている。
【0051】
バーコードリーダ4は、本実施形態に係る「マーク検出手段」の一例として、搬送車の走行に伴ってバーコードBC1〜BC5を読み取り、読み取ったバーコードBC1〜BC5に付されたバーコードIDを制御部9に送る。
【0052】
モータ5は、制御部9の制御によって駆動される。モータ5には、後述するエンコーダ6が取り付けられている。
【0053】
エンコーダ6は、本実施形態に係る「位置検出手段」の一例として、モータ5に取り付けられており、バーコードリーダ4によってバーコードBC1〜BC5が読み取られる度に走行距離を零として、最後に読み取られたバーコードからの走行位置を検出する。エンコーダ6は、検出された走行位置を制御部6に送る。
【0054】
送受信部7は、本実施形態に係る「進入制御手段」の一部として機能し、制御部9の制御により、ビークル3が信号発信領域A2内に進入するのを禁止する進入禁止信号を発信し、更に条件に応じて進入禁止信号を解除する。尚、進入禁止信号を解除する禁止解除信号を発信するように構成することも可能である。
【0055】
メモリ8は、本実施形態に係る「記憶手段」の一部として機能し、本実施形態では、後述する、エラーコードテーブル20、及び地図情報テーブル30を格納している。
【0056】
制御部9は、搬送コントローラ10からの搬送指示に従って、ビークル3の各部を制御する。制御部9は、本発明に係る「進入制御手段」の一例として、合流箇所C1に進入しようとするビークル3の走行を制御する。制御部9は、異常判定部9a、現在位置特定部9b、及び衝突判定部9cを備えており、これら各部の判定又は特定に基づいて、進入禁止信号を発信させる又は該発信を解除するように、送受信部7に対して発信に係る指示を与える。
【0057】
異常判定部9aは、本発明に係る「異常判定手段」の一例として、ビークル3の異常を判定すると共に、エラーコードテーブル20を用いて、異常が生じた部位の体系を判定する。
【0058】
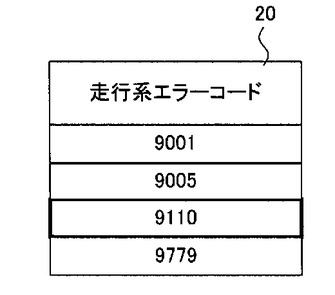
エラーコードテーブル20について図4を参照して説明する。図4は、本実施形態における異常判定手段に使用される、エラーコードを示すテーブルである。
【0059】
エラーコードテーブル20は、ビークル3において、走行系の部位に付された走行系エラーコード「9001」、「9005」、「9110」及び「9779」を示す。異常判定部9aは、例えばエンコーダ6が作動不能になった場合に、エンコーダ6を異常と判定し、走行系エラーコード「9110」を出力する。
【0060】
制御部9は、本実施形態では特に、異常判定部9aから、走行系エラーコードが出力された場合に、ビークル3の現在位置(即ち、本発明に係る「停止位置」を示す)の特定が不確かであるために、ビークル3の信号発信領域A2内への進入を継続して禁止するように、送受信部7により、進入禁止信号を継続して発信させる。即ち、疑わしい現在位置に基づいて走行再開させることはぜず、一旦ハイレベルとされた進入禁止信号は、そのまま維持される。
【0061】
他方、異常判定部9cから、走行系エラーコードが出力されない場合に、ビークル3の現在位置の特定に支障がないとして、現在位置特定部9bに対して、その現在位置の特定を指示する。
【0062】
現在位置特定部9bは、本発明に係る「位置特定手段」の一例として、ビークル3の現在位置を特定する。現在位置特定部9bは、バーコードリーダ4に最後に読み取られた最新のバーコード、及びエンコーダ6に検出された走行位置に基づいて、現在位置を特定し、衝突判定部9cに送る。現在位置特定部9bは、現在位置(又は停止位置)として、バーコードBC1が有するバーコードID「12345」、及びバーコードBC1からの走行位置「350mm」の二値を取得する。
【0063】
衝突判定部9cは、本発明に係る「位置判定手段」の一例として、現在位置特定部9bからの停止位置が、合流領域A1内にあるか否かを判定する。衝突判定部9cは、この判定に、地図情報テーブル30を使用する。
【0064】
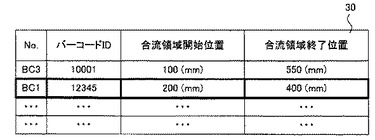
地図情報テーブル30について図5を参照して説明する。図5は、本実施形態における位置判定手段に使用される、地図情報を示すテーブルである。
【0065】
地図情報テーブル30は、軌道1上における所定の位置や領域を示しており、本実施形態では特に、合流領域A1を示す領域情報、例えば、バーコードから、合流領域A1が開始する位置(即ち、合流領域開始位置)、及び合流領域A1が終了する位置終了位置(即ち、合流領域終了位置)を示している。領域情報は、バーコードIDに紐付けられており、バーコードID「12345」の場合に、合流領域開始位置「200mm」、合流領域終了位置「400mm」であり、バーコードID「10001」の場合に、合流領域開始位置「100mm」、合流領域終了位置「550mm」である。例えばバーコードID「12345」、走行位置「350mm」である停止位置は、合流領域開始位置「200mm」と合流領域終了位置「400mm」との間に位置する。このため、停止位置が合流領域A1内にあると判定され、支軌道1bから、合流領域A1内に進入しようとするビークル3bと衝突の可能性があると判定される。
【0066】
制御部9は、衝突判定部9cにより、例えば図1の状態でビークル3aが故障で停止してしまっており、これにビークル3bが衝突すると判定された場合に、或いは例えば図2の状態でビークル3bが故障で停止してしまっており、これにビークル3aが衝突すると判定された場合に、送受信部7による進入禁止信号を継続して発信させる。即ち、一旦ハイレベルとされた進入禁止信号は、そのまま維持される。
【0067】
他方、衝突判定部9cにより、衝突の可能性がないと判定された場合に、送受信部7による進入禁止信号の発信が解除される。即ち、一旦ハイレベルとされた進入禁止信号は、この判定の結果を受けて、ローレベルとされる。これにより、ビークル3bの合流領域A1内への進入が可能になる。
【0068】
搬送コントローラ10は、搬送工程に基づいて、軌道1上を走行する全てのビークル3を統括的に制御する。搬送コントローラ10は、本発明に係る「経路変更手段」の一例として、各ビークルに対して、FOUPを搬送するための走行経路を指示する。本実施形態では特に、搬送コントローラ10は、衝突判定部9cの判定結果に基づいて進入禁止信号が継続して発信される間、この進入禁止信号を受信したビークル3の走行経路を、合流領域A1を迂回するものに変更する。
【0069】
搬送コントローラ10は、本実施形態では特に、故障検出部10aを備える。故障検出部10aは、信号発信領域A2において、ビークル3a,3bの故障を検出し、制御コントローラ10は、故障が検出された際に、停止させるべき故障を検出してビークル3a,3bを強制的に停止させる。或いは、故障検出部10aは、信号発信領域A2において、ビークル3a,3bにおける停止を伴う故障を検出する。尚、この場合、故障検出部10aは、信号発信領域A2に限らず、ビークル3a,3bが任意の軌道位置にあっても、故障を検出してよい。或いは、定期的、不定期的若しくは常時に又は何らかのトリガを受けて、故障を検出してもよい。
【0070】
いずれにせよ、搬送コントローラ10による制御下或いは故障検出部10aによる検出下で、ビークル3a又は3bが信号発信領域A2で停止してしまう若しくは停止されてしまう故障が発生する場合がある。即ち、ビークル3a又は3bから進入禁止信号が出力されている最中に、このようなビークル3a又は3bで、停止を伴う故障が発生する場合がある。この場合、仮に何らの対応もしないとすれば、進入禁止信号は解除されない。よって、合流箇所C1を実際には通過可能であるのに、合流箇所C2を利用できない状況が続くという状況も生じ得る。しかるに本実施形態によれば、次に詳述する制御処理によって、故障による搬送効率へのダメージを、最小限に抑えられる。
(搬送システムの進入制御処理)
【0071】
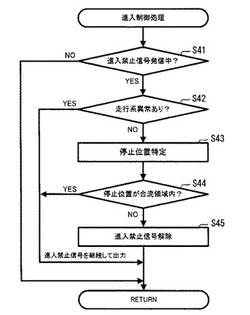
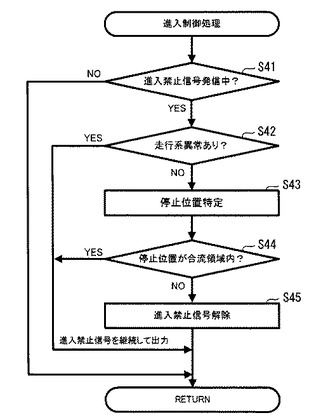
次に、本実施形態に係る搬送システムの進入制御処理について図6を参照して説明する。図6は、本実施形態の進入制御処理を示すフローチャートである。尚、図6に示される進入制御処理において、図1のように、支軌道1a上を先にビークル3aが走行し、その後から支軌道1b上をビークル3bが走行する場合を想定する。
【0072】
図6において、先ず、ビークル3bが信号発信領域A2に侵入すると、ビークル3bの制御部9によって、ビークル3aから進入禁止信号が発信されているか否かが判定される(ステップS41)。この判定の結果、発信中でない場合に(ステップS41:NO)、信号発信領域A2にはビークル3aが存在していないものとして、一連の処理が終了される。これにより、ビークル3bは、信号発信領域A2内を通常走行し、信号発信領域A2を走行中には、進入禁止信号を支軌道1a側に向けて自ら発信する。
【0073】
一方、ステップS41の判定の結果により、進入禁止信号が発信中である場合に(ステップS41:YES)、発信側であるビークル3aについて、異常判定部9aにより、走行系の異常があるか否かが判定される(ステップS42)。この判定の結果、走行系の異常がある(即ち、走行系エラーコードが異常判定部9aから出力された)場合に(ステップS42:YES)、進入禁止信号は解除されないまま、一連の処理が終了される。これにより、ビークル3bの信号発信領域A2内への進入が禁止された状態は、継続される。
【0074】
一方、ステップS42の判定の結果、故障しているビークル3aについて、走行系の異常がない(即ち、走行系エラーコードが異常判定部9aから出力されない)場合に(ステップS42:NO)、故障しているビークル3aにおける現在位置特定部9bにより、バーコードリーダ4による最新のバーコード、及びエンコーダ6による走行位置に基づいて、故障しているビークル3aの停止位置が特定される(ステップS43)。続いて、地図情報テーブル30が参照されることで、特定された停止位置が、合流領域A1内(即ち、ビークル3aに衝突する位置)であるか否かが判定される(ステップS44)。この判定の結果、故障しているビークル3aの停止位置が合流領域A1内にあって、仮にビークル3bを走行させたのではビークル3aに衝突してしまう場合に(ステップS44:YES)、進入禁止信号は解除されないままで、一連の処理が終了される。
【0075】
一方、ステップS44の判定の結果、故障しているビークル3aの停止位置が、合流領域A1内にない場合に(ステップS44:NO)、進入禁止信号は解除される(ステップS45)。すると、ビークル3bは、故障しているビークル3aの脇を通過できる。これにより、一連の進入制御が終了される。
【0076】
このように、故障検知部10bより、信号発信領域A2内において、ビークル3aで停止を伴う故障が発生した場合、制御部9により、一のビークル3aの停止位置を基準として他のビークル3bが一のビークル3aに衝突するか否かが判定され、この判定の結果として、他のビークル3bが一のビークル3aに衝突しないと判定されれば、進入禁止信号は解除される。よって、この場合には、他のビークル3bは、停止されたままとされることはなく、合流箇所C1を通過できる。これにより、ビークル同士の衝突を防止しつつ、ビークルを効率良く稼働可能となる。
【0077】
本発明は、上述した実施形態に限られるものではなく、請求の範囲及び明細書全体から読み取れる発明の要旨或いは思想に反しない範囲で適宜変更可能であり、そのような変更を伴う搬送車もまた本発明の技術的範囲に含まれるものである。
【図面の簡単な説明】
【0078】
【図1】実施形態に係る軌道及び複数の搬送車の一例を示す模式図である。
【図2】実施形態に係る軌道及び複数の搬送車の他の例を示す模式図である。
【図3】実施形態に係る各搬送車の構成を示すブロック図である。
【図4】実施形態に係る異常判定手段に使用される、エラーコードを示すテーブルである。
【図5】実施形態に係る位置判定手段に使用される、地図情報を示すテーブルである。
【図6】実施形態に係る進入制御処理を示すフローチャートである。
【符号の説明】
【0079】
1…軌道、3…搬送車、7…送受信部、9…制御部、10…搬送コントローラ、100…搬送システム
【技術分野】
【0001】
本発明は、例えば半導体装置製造用の各種基板等が収容された容器等の被搬送物を、合流箇所を含む軌道上で搬送する搬送システム及び搬送車の技術分野に関する。
【背景技術】
【0002】
この種の搬送システムとして、例えば交差エリアに本線軌道及び支線軌道が属する場合に、本線軌道上を交差点に向かって走行する搬送車に対し、支線軌道上に搬送車がないことを告知する複数の投光器を備え、交差エリアにおける搬送車同士の衝突を防止するものがある(特許文献1参照)。
【0003】
この種の搬送システムに係る技術として、例えばカーブを走行する場合に、前輪を速度制御し、後輪をトルク制御することによって、搬送車をカーブにおいて高速で走行させる走行制御方法がある(特許文献2参照)。
【0004】
【特許文献1】特開2006−48333号公報
【特許文献2】特開2004−94417号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した特許文献1によれば、交差点毎に複数の投光器を設けるために、搬送システムが高コストに構成されてしまう。また、交差点毎に複数の投光器を設置するためのスペースを確保しなければならず、搬送装置が大型化してしまうという技術的問題点がある。
【0006】
また、上述した特許文献2の走行制御方法等で、一の搬送車が、交差点等の合流部に繋がるカーブを高速走行する場合に、脱輪等が生じて、一の搬送車が一の軌道における合流部やその近傍に停止してしまうことがある。このような事態に、該合流部に合流される他の軌道を走行する他の搬送車が、停止状態の一の搬送車に衝突するのを防止するために、例えば、他の軌道から合流部への進入が禁止される。これでは、例えば、該合流部に掛らない、該合流部の近傍に一の搬送車が停止している場合に、一の搬送車が邪魔にならず、他の搬送車が合流部を通過可能であるにも関わらず、他の軌道について進入禁止の状態が継続されてしまうという問題点がある。
【0007】
本発明は、例えば上述した問題点に鑑みなされたものであり、搬送車同士の衝突を防止しつつ、搬送車を効率良く稼働可能な搬送システム及び該搬送システムに適用される搬送車を提供することを課題とする。
【課題を解決するための手段】
【0008】
本発明の搬送システムは上記課題を解決するために、合流箇所を有する軌道と、該軌道上を夫々走行可能であると共に被搬送物を夫々搬送可能な複数の搬送車と、前記軌道上における前記合流箇所を含む所定範囲内へ、前記複数の搬送車のうち一の搬送車が前記軌道の一部を介して進入した場合に、前記所定範囲内へ、前記複数の搬送車のうち他の搬送車が前記軌道の他部を介して進入することを禁止する旨の進入禁止信号を出力する進入制御手段とを備え、前記進入制御手段は、前記進入禁止信号が出力されている際に前記一の搬送車で停止を伴う故障が発生した場合に、前記一の搬送車の停止位置を基準として前記他の搬送車が前記一の搬送車に衝突するか否かを判定し、前記他の搬送車が衝突しないと判定された場合に、前記進入禁止信号を解除する。
【0009】
本発明の搬送システムによれば、その動作時には、例えば天井に敷設されたレール等の軌道上を走行する、例えばビークル、OHT(Overhead Hoist Transport)等の搬送車によって、例えばFOUP(Front Opening Unified Pod)等の荷或いは被搬送物は搬送される。この際、一の搬送車が軌道上における合流箇所を含む所定範囲内へ、軌道の一部を介して進入した場合には、この所定範囲内へ、軌道の他部を介して進入することを禁止する旨の進入禁止信号が、例えばコントローラ、メモリ等を含んでなる進入制御手段から出力される。すると、出力された進入禁止信号に応じて、他の搬送車を停止させれば、他の搬送車が、合流箇所を含む所定範囲内で、一の搬送車に後方や側方から衝突することを避けられる。
【0010】
このような動作中、一の搬送車が所定範囲内で、故障して停止してしまう場合や、故障が検出されたために強制的に走行を停止させたりする場合がある。ここに「所定範囲」は、上述の通り進入禁止信号を出力すべき範囲(言い換えれば「進入禁止信号出力用の範囲」)である。
【0011】
このような「所定範囲」即ち、通常走行時における進入禁止信号出力用の範囲は、二つの搬送車(即ち、ここでの一の搬送車及び他の搬送車)が夫々通常走行している場合に、二つの搬送車間の衝突を避ける範囲であるので、二つの搬送車が走行していることが大前提で設定される。より具体的には、二つの搬送車の夫々についての、停止までに係る制動距離や、減速に必要な距離或いは時間、安全マージンや制動誤差等を考慮した上で、同時走行に係る二つの搬送車間における衝突を確実に避ける範囲として設定される。このため、所定範囲は、二つの搬送車の通常走行を大前提とするというその性質上、一方の搬送車が所定範囲内のいずれかの停止位置に故障で停止した場合における、一の搬送車に他の搬送車が実際に衝突する範囲(以下適宜「合流領域」と称する)とは、一致しない。即ち、停止位置が所定範囲内のいずれの位置になるかに応じて、実際に衝突するのかしないのかは分かれる。しかも、搬送車が高速走行する程、進入禁止信号の出力、送受信、処理時間等までも含めた他の搬送車における制動距離が長くなるので、これら所定範囲と合流領域の不一致の度合いは高くなる。いずれにせよ、これら所定範囲と合流領域が一致することはない。
【0012】
ここで特に、所定範囲内で一の搬送車が故障で停止した場合であっても、一の搬送車の停止位置が、運よく他の搬送車が合流箇所を通過可能である停止位置である場合(言い換えれば、合流領域には入っていない場合)について考える。この場合、仮に何らの手当てもしなければ、進入禁止信号が出力された後に変化はない。このため、例えば、他の搬送車は停止されたままとなる。或いは、他の搬送車については合流箇所を避けた走行経路の設定が行われたままとなる。
【0013】
しかるに本発明によれば、進入禁止信号が出力されている際に一の搬送車で停止を伴う故障が発生した場合、進入制御手段によって、一の搬送車の停止位置を基準として他の搬送車が一の搬送車に衝突するか否かが判定され、この判定の結果として、他の搬送車が一の搬送車に衝突しないと判定されれば、進入禁止信号は解除される。よって、この場合には、他の搬送車は、停止されたままとされることはなく、合流箇所を通過できる。或いは、他の搬送車の走行経路の設定について、合流箇所を避けたものに変更する必要も無い。即ち、一の搬送車が故障で停止してしまっても、搬送システムとしての搬送効率が下がるのを極めて効率的に低減でき、特に一の搬送車の修理や手当てが完了するまでの間ずっと他の搬送車を停止させ続ける或いは合流箇所を通過不可能としてしまうことと比較した場合における、相対的な搬送効率の上昇は極めて顕著である。
【0014】
以上の結果、本発明の搬送システムによれば、搬送車同士の衝突を防止しつつ、搬送車を効率良く稼働可能となる。
【0015】
本発明の搬送システムの一態様では、前記故障が発生した場合に、前記停止位置を特定する位置特定手段を更に備え、前記進入制御手段は、前記特定された停止位置を基準として前記他の搬送車が衝突するか否かを判定する。
【0016】
この態様によれば、停止を伴う故障が発生した場合に、例えばエンコーダ、バーコードリーダ、プロセッサ等を含んでなる位置特定手段によって、停止位置が特定される。尚、位置特定手段は、故障が検出された場合に限らず、定期的、不定期的若しくは常時に又は何らかのトリガを受けて、停止位置を特定してもよい。すると、進入制御手段によって、このように特定された停止位置を基準として、他の搬送車が衝突するか否かが判定される。よって、より確実に、進入禁止信号の解除(或いは否解除)を行える。
【0017】
この態様では、前記軌道上における所定の軌道位置を付けられた識別マークと、前記一の搬送車が前記所定の軌道位置を通過する際に、前記識別マークを検出するマーク検出手段とを更に備え、前記位置特定手段は、前記検出された識別マークに基づいて、前記停止位置を特定してもよい。
【0018】
このように構成すれば、一の搬送車が所定の軌道位置(例えば、所定範囲の開始位置など)を通過すると、この軌道位置に付けられた、例えばバーコード等の識別マークが、例えばバーコードリーダ等のマーク検出手段によって検出される。すると、位置特定手段によって、このように検出された識別マークに基づいて、停止位置が特定される。よって、比較的容易にして迅速且つ確実に、停止位置を特定することが可能となる。
【0019】
この場合更に、前記位置特定手段は、前記所定の軌道位置を基準とする前記軌道上に沿った距離を、検出することで、前記停止位置を検出する位置検出手段を有するように構成してもよい。
【0020】
このように構成すれば、例えばエンコーダ等の位置検出手段によって、所定の軌道位置を基準とする軌道に沿った距離が検出され、この距離(即ち、識別マークが付された位置からの走行距離)から停止位置が検出される。よって、より正確に停止位置を特定することが可能となる。
【0021】
上述した位置特定手段を備える態様では、前記故障が発生した場合に、前記位置特定手段に異常があるか否かを判定する異常判定手段を更に備え、前記進入制御手段は、前記異常があると判定されないことを条件に、前記他の搬送車が衝突するか否かを判定する、又は前記他の搬送車が衝突しないと判定された場合に前記進入禁止信号を解除するように構成してもよい。
【0022】
このように構成すれば、一の搬送車について故障が発生した場合に、例えばプロセッサ、メモリ等を含んでなる異常判定手段によって、位置特定手段に異常があるか否かが判定される。尚、異常判定手段は、故障が検出された場合に限らず、定期的、不定期的若しくは常時に又は何らかのトリガを受けて、位置特定手段に異常があるか否かを判定してもよい。続いて、この判定の結果として異常があると判定されないことを条件に、進入制御手段によって、他の搬送車が衝突するか否かが判定されるか、又は他の搬送車が衝突しないと判定された場合に進入禁止信号が解除される。従って、故障によって停止位置の特定までも怪しい場合に、進入禁止信号が解除されることで衝突を引き起こしてしまう事態の発生を防げる。
【0023】
本発明の搬送システムの他の態様では、前記進入制御手段は、前記合流箇所を含むと共に前記所定範囲よりも小さく且つ前記一の搬送車が停止していると前記他の搬送車が前記一の搬送車に衝突する範囲として、予め設定されている合流領域内に、前記停止位置が入っているか否かにより、前記他の搬送車が衝突するか否かを判定する。
【0024】
この態様によれば、合流箇所を含むと共に前記所定範囲よりも小さく且つ一の搬送車が停止していると他の搬送車が一の搬送車に衝突する範囲として、合流領域が予め設定されている。その後、一の搬送車について停止を伴う故障が発生した場合には、進入制御手段によって、このように設定された合流領域内に、前記停止位置が入っているか否かにより、前記他の搬送車が衝突するか否かを判定する。従って、故障が検出された場合における他の搬送車が衝突するか否かの判定を、迅速に行うことが可能となる。
【0025】
この態様では、前記合流領域を示す領域情報を、前記合流箇所並びに前記所定範囲若しくは前記合流領域に含まれる前記軌道上における軌道位置の少なくとも一方に対応付ける形で格納する記憶手段を更に備え、前記進入制御手段は、前記停止位置に対応する前記少なくとも一方に対応付けられた前記領域情報を取得し、前記取得された領域情報により示される前記合流領域内に、前記停止位置が入っているか否かにより、前記他の搬送車が衝突するか否かを判定するように構成してもよい。
【0026】
このように構成すれば、例えばテーブルが内部に構築されたメモリ等の記憶手段を参照することで、一の搬送車について故障が発生した場合における他の搬送車が衝突するか否かの判定を、より一層迅速に行うことが可能となる。
【0027】
本発明の搬送システムの他の態様では、前記進入制御手段は、少なくとも部分的に、前記搬送車に搭載されている。
【0028】
この態様によれば、各搬送車に搭載された進入制御手段の部分又は全部によって、進入禁止信号の出力及び解除を、確実に行うことが可能となる。
【0029】
本発明の搬送システムの他の態様では、前記進入制御手段は、前記進入禁止信号を前記一の搬送車側から発信し、前記他の搬送車側は、前記進入禁止信号を受信すると、停止するように構成されている。
【0030】
この態様によれば、進入禁止信号を搬送車間で送受信することで、複数の搬送車が多数ある場合にも、進入禁止に関する制御を効率的に且つ確実に行うことが可能となる。
【0031】
本発明の搬送システムの他の態様では、前記進入禁止信号が出力された場合に、前記他の搬送車の前記軌道上における走行経路を、前記合流箇所を迂回するものに変更する経路変更手段を更に備える。
【0032】
この態様によれば、進入禁止信号が出力された場合、他の搬送車を停止させるのではなく、例えばプロセッサ、メモリ等を含んでなる経路変更手段によって、合流箇所を迂回させるので、全体の搬送効率のアップに繋がる。
【0033】
上述の合流領域を用いた態様では、前記他の搬送車が衝突すると判定された場合に、前記他の搬送車の前記軌道上における走行経路を、前記合流箇所を迂回するものに変更する経路変更手段を更に備えてもよい。
【0034】
このように構成すれば、進入禁止信号が解除されない場合、他の搬送車を停止させるのではなく、例えばプロセッサ、メモリ等を含んでなる経路変更手段によって、合流箇所を迂回させるので、全体の搬送効率のアップに繋がる。
【0035】
本発明の搬送車は上記課題を解決するために、合流箇所を有する軌道上を走行可能であると共に被搬送物を搬送可能な搬送車であって、前記軌道上における前記合流箇所を含む所定範囲内へ、前記軌道の一部を介して進入した場合に、前記所定範囲内へ、他の搬送車が前記軌道の他部を介して進入することを禁止する旨の進入禁止信号を出力する進入制御手段を備え、前記進入制御手段は、前記進入禁止信号が出力されている際に前記一の搬送車で停止を伴う故障が発生した場合に、当該搬送車の停止位置を基準として前記他の搬送車が当該搬送車に衝突するか否かを判定し、前記他の搬送車が衝突しないと判定された場合に、前記進入禁止信号を解除する。
【0036】
本発明の搬送車によれば、上述した本発明の搬送システムの場合と同様に、搬送車同士の衝突を防止しつつ、搬送車を効率良く稼働可能となる。
【0037】
尚、本発明の搬送車においては、上述した本発明の搬送システムの場合と同様の各種態様を採用可能である。
【0038】
本発明の作用及び他の利得は次に説明する実施するための最良の形態から明らかにされる。
【発明を実施するための最良の形態】
【0039】
以下、本発明の実施形態について図を参照しつつ説明する。
【0040】
先ず、実施形態に係る搬送システムの構成について説明する。ここに図1は、実施形態に係る複数の軌道及び複数の搬送車の一状態を模式的に示し、図2は、図1の軌道及び複数の搬送車の他の状態を模式的に示し、図3は、図1の各搬送車の構成を機能的に示す。
【0041】
図1において、本実施形態に係る搬送システム100は、軌道1、ビークル3、及び搬送コントローラ10を備える。軌道1は、二つの支軌道1a及び1b、並びにこれら二つの支軌道1a及び1bを合流箇所C1で合流する合流軌道1cを含む。本実施形態では特に、本発明に係る「所定範囲」の一例として、合流箇所C1の前後に広がる信号発信領域A2が設定され、更に、この中に合流領域A1が設定されている。
【0042】
「信号発信領域A2」は、そこにビークル3a及び3bの一方が先に侵入した場合に、一方が信号発信領域A2内にある限り原則として(即ち、後述の強制的な解除がない限り)、他方に対して信号発信領域A2に侵入することを禁止する旨の進入禁止信号を発信し続ける領域である。更に、このように一方から送信された進入禁止信号を他方が受信する領域でもある。
【0043】
より具体的には、支軌道1a側のビークル3aが信号発信領域A2に存在している間中(即ち、信号発信領域A2内を走行中又は信号発信領域A2内に停止中)、支軌道1a側のビークル3aから支軌道1b側のビークル3bに対して、例えば進入禁止信号がハイレベルとされて発信され、特に後述の如く故障後における強制解除が実行されない限り、ハイレベルとされた進入禁止信号の発信が継続される。逆に、支軌道1b側のビークル3bが信号発信領域A2に存在している間中(即ち、信号発信領域A2内を走行中又は信号発信領域A2内に停止中)、支軌道1b側のビークル3bから支軌道1a側のビークル3aに対して、例えば進入禁止信号がハイレベルとされて発信され、特に後述の如く故障後における強制解除が実行されない限り、ハイレベルとされた進入禁止信号の発信が継続される。
【0044】
尚、ビークル3a又は3bが信号発信領域A2に進入して、進入禁止信号の発信を開始する位置を、以下「発信開始位置」と称し、信号発信領域A2を脱出して、進入禁止信号の発信を停止する位置を、以下「発信解除位置」と称する。信号発信領域A2は、支軌道1a又は支軌道1bにおける発信開始位置で始まり、合流箇所C1後における発信解除位置で終わる。
【0045】
これに対して「合流領域A1」は、支軌道1a上を走行するビークル3aが合流箇所C1を通過する際に、故障により停止してしまっている場合に、仮に支軌道1b上を走行するビークル3bが進入すると、この停止しているビークル3aに後方又は側方から衝突してしまう領域、言い換えれば、ビークル3aが停止していると、ビークル3bが物理的に通行できない領域を意味する。或いは、合流領域A1は、支軌道1b上を走行するビークル3bが合流箇所C1を通過する際に、故障により停止してしまっている場合に、仮に支軌道1a上を走行するビークル3aが進入すると、この停止しているビークル3bに後方又は側方から衝突してしまう領域、言い換えれば、ビークル3bが停止していると、ビークル3aが物理的に通行できない領域を意味する。
【0046】
軌道1には、複数のバーコードBC1〜BC5が付けられている。各バーコードは、本発明に係る「識別マーク」の一例として、軌道1上における軌道位置を示す。支軌道1a側のビークル3aについて、バーコードBC1が発信開始位置を示し、バーコードBC2が合流領域A1の始点を示す。支軌道1b側のビークル3bについて、バーコードBC3が発信開始位置を示し、バーコードBC4が合流領域A1の始点を示す。合流軌道1c上のビークル3a,3bについて、バーコードBC5が発信解除位置を示す。このようなバーコードBC1〜BC5の情報は、ビークル3の制御に次のように使用される。
【0047】
即ち、バーコードBC1が参照されることで、ビークル3aによって、自身が信号発信領域A2内に侵入したことが認識され、進入禁止信号が発信される。すると他方で、バーコードBC3が参照されることで、ビークル3bによって、自身が信号発信領域A2内に侵入したことが認識され、進入禁止信号の受信が開始される。尚、受信については、自身が信号発信領域A2内に侵入したか否かと無関係に或いはバーコードBC3と無関係に、常時行われてもよい。この場合、ビークル3bは、ビークル3aからの進入禁止信号を受けて、合流領域A1の手前で停止される。即ち、ビークル3bでは、自身の信号発信領域A2内への侵入が認識されるものの、ビークル3aからの進入禁止信号の受信が開始される。この場合、ビークル3bは、ビークル3aからの進入禁止信号を受けて、合流領域A1の手前で停止されるか、合流領域A1の手前で即時停止可能な速度まで減速される。その後、進入禁止信号の解除が行われると、ビークル3bでは走行再開されたり加速されたりする。或いは、後述の如く故障時における進入禁止信号の解除が迅速に行われると、ビークル3bでは、殆ど又は全く減速することなく合流箇所C1を通過してもよい。停止或いは減速から走行再開又は加速までの損失を最小限に抑える観点から、ビークル3bは、バーコードBC4で示される合流領域A1の始点に近接した位置で進んでから停止されるのがよい。
【0048】
図1の状態において、ビークル3aが正常であれば、支軌道1b上のビークル3bに対して進入禁止信号が発信された後に、支軌道1a側のビークル3aがバーコードBC5を超えた場合に、ビークル3bに対して、進入禁止信号が解除される。例えば、ハイレベルとされていた進入禁止信号がローレベルとされる。この進入禁止信号の解除により、ビークル3bは、合流領域A1に進入可能になる。これと同時に或いは相前後して、今度は、信号発信領域A2内に侵入したビークル3bから、支軌道1a側に次に来るかもしれないビークル3aに対して、進入禁止信号が発信される。
【0049】
他方、図2に示すように、ビークル3aよりもビークル3bが先に信号発信領域A2内に侵入した場合にも同様に、ビークル3aが信号発信領域A2内で、バーコードBC2より手前で停止又は減速され、ビークル3bの通過後に、信号発信領域A2内へ進入する。或いは、進入禁止信号の受信や解除に応じて、停止されたり、走行再開されたりする。
【0050】
図3において、ビークル3は、本実施形態に係る「搬送車」の一例として、バーコードリーダ4、モータ5、エンコーダ6、送受信部7、メモリ8、及び制御部9を備える。ビークル3は、軌道1に沿って走行すると共に、不図示の製造装置やストッカにFOUPを搬送する。ビークル3の底面には、バーコードリーダ4が取り付けられている。
【0051】
バーコードリーダ4は、本実施形態に係る「マーク検出手段」の一例として、搬送車の走行に伴ってバーコードBC1〜BC5を読み取り、読み取ったバーコードBC1〜BC5に付されたバーコードIDを制御部9に送る。
【0052】
モータ5は、制御部9の制御によって駆動される。モータ5には、後述するエンコーダ6が取り付けられている。
【0053】
エンコーダ6は、本実施形態に係る「位置検出手段」の一例として、モータ5に取り付けられており、バーコードリーダ4によってバーコードBC1〜BC5が読み取られる度に走行距離を零として、最後に読み取られたバーコードからの走行位置を検出する。エンコーダ6は、検出された走行位置を制御部6に送る。
【0054】
送受信部7は、本実施形態に係る「進入制御手段」の一部として機能し、制御部9の制御により、ビークル3が信号発信領域A2内に進入するのを禁止する進入禁止信号を発信し、更に条件に応じて進入禁止信号を解除する。尚、進入禁止信号を解除する禁止解除信号を発信するように構成することも可能である。
【0055】
メモリ8は、本実施形態に係る「記憶手段」の一部として機能し、本実施形態では、後述する、エラーコードテーブル20、及び地図情報テーブル30を格納している。
【0056】
制御部9は、搬送コントローラ10からの搬送指示に従って、ビークル3の各部を制御する。制御部9は、本発明に係る「進入制御手段」の一例として、合流箇所C1に進入しようとするビークル3の走行を制御する。制御部9は、異常判定部9a、現在位置特定部9b、及び衝突判定部9cを備えており、これら各部の判定又は特定に基づいて、進入禁止信号を発信させる又は該発信を解除するように、送受信部7に対して発信に係る指示を与える。
【0057】
異常判定部9aは、本発明に係る「異常判定手段」の一例として、ビークル3の異常を判定すると共に、エラーコードテーブル20を用いて、異常が生じた部位の体系を判定する。
【0058】
エラーコードテーブル20について図4を参照して説明する。図4は、本実施形態における異常判定手段に使用される、エラーコードを示すテーブルである。
【0059】
エラーコードテーブル20は、ビークル3において、走行系の部位に付された走行系エラーコード「9001」、「9005」、「9110」及び「9779」を示す。異常判定部9aは、例えばエンコーダ6が作動不能になった場合に、エンコーダ6を異常と判定し、走行系エラーコード「9110」を出力する。
【0060】
制御部9は、本実施形態では特に、異常判定部9aから、走行系エラーコードが出力された場合に、ビークル3の現在位置(即ち、本発明に係る「停止位置」を示す)の特定が不確かであるために、ビークル3の信号発信領域A2内への進入を継続して禁止するように、送受信部7により、進入禁止信号を継続して発信させる。即ち、疑わしい現在位置に基づいて走行再開させることはぜず、一旦ハイレベルとされた進入禁止信号は、そのまま維持される。
【0061】
他方、異常判定部9cから、走行系エラーコードが出力されない場合に、ビークル3の現在位置の特定に支障がないとして、現在位置特定部9bに対して、その現在位置の特定を指示する。
【0062】
現在位置特定部9bは、本発明に係る「位置特定手段」の一例として、ビークル3の現在位置を特定する。現在位置特定部9bは、バーコードリーダ4に最後に読み取られた最新のバーコード、及びエンコーダ6に検出された走行位置に基づいて、現在位置を特定し、衝突判定部9cに送る。現在位置特定部9bは、現在位置(又は停止位置)として、バーコードBC1が有するバーコードID「12345」、及びバーコードBC1からの走行位置「350mm」の二値を取得する。
【0063】
衝突判定部9cは、本発明に係る「位置判定手段」の一例として、現在位置特定部9bからの停止位置が、合流領域A1内にあるか否かを判定する。衝突判定部9cは、この判定に、地図情報テーブル30を使用する。
【0064】
地図情報テーブル30について図5を参照して説明する。図5は、本実施形態における位置判定手段に使用される、地図情報を示すテーブルである。
【0065】
地図情報テーブル30は、軌道1上における所定の位置や領域を示しており、本実施形態では特に、合流領域A1を示す領域情報、例えば、バーコードから、合流領域A1が開始する位置(即ち、合流領域開始位置)、及び合流領域A1が終了する位置終了位置(即ち、合流領域終了位置)を示している。領域情報は、バーコードIDに紐付けられており、バーコードID「12345」の場合に、合流領域開始位置「200mm」、合流領域終了位置「400mm」であり、バーコードID「10001」の場合に、合流領域開始位置「100mm」、合流領域終了位置「550mm」である。例えばバーコードID「12345」、走行位置「350mm」である停止位置は、合流領域開始位置「200mm」と合流領域終了位置「400mm」との間に位置する。このため、停止位置が合流領域A1内にあると判定され、支軌道1bから、合流領域A1内に進入しようとするビークル3bと衝突の可能性があると判定される。
【0066】
制御部9は、衝突判定部9cにより、例えば図1の状態でビークル3aが故障で停止してしまっており、これにビークル3bが衝突すると判定された場合に、或いは例えば図2の状態でビークル3bが故障で停止してしまっており、これにビークル3aが衝突すると判定された場合に、送受信部7による進入禁止信号を継続して発信させる。即ち、一旦ハイレベルとされた進入禁止信号は、そのまま維持される。
【0067】
他方、衝突判定部9cにより、衝突の可能性がないと判定された場合に、送受信部7による進入禁止信号の発信が解除される。即ち、一旦ハイレベルとされた進入禁止信号は、この判定の結果を受けて、ローレベルとされる。これにより、ビークル3bの合流領域A1内への進入が可能になる。
【0068】
搬送コントローラ10は、搬送工程に基づいて、軌道1上を走行する全てのビークル3を統括的に制御する。搬送コントローラ10は、本発明に係る「経路変更手段」の一例として、各ビークルに対して、FOUPを搬送するための走行経路を指示する。本実施形態では特に、搬送コントローラ10は、衝突判定部9cの判定結果に基づいて進入禁止信号が継続して発信される間、この進入禁止信号を受信したビークル3の走行経路を、合流領域A1を迂回するものに変更する。
【0069】
搬送コントローラ10は、本実施形態では特に、故障検出部10aを備える。故障検出部10aは、信号発信領域A2において、ビークル3a,3bの故障を検出し、制御コントローラ10は、故障が検出された際に、停止させるべき故障を検出してビークル3a,3bを強制的に停止させる。或いは、故障検出部10aは、信号発信領域A2において、ビークル3a,3bにおける停止を伴う故障を検出する。尚、この場合、故障検出部10aは、信号発信領域A2に限らず、ビークル3a,3bが任意の軌道位置にあっても、故障を検出してよい。或いは、定期的、不定期的若しくは常時に又は何らかのトリガを受けて、故障を検出してもよい。
【0070】
いずれにせよ、搬送コントローラ10による制御下或いは故障検出部10aによる検出下で、ビークル3a又は3bが信号発信領域A2で停止してしまう若しくは停止されてしまう故障が発生する場合がある。即ち、ビークル3a又は3bから進入禁止信号が出力されている最中に、このようなビークル3a又は3bで、停止を伴う故障が発生する場合がある。この場合、仮に何らの対応もしないとすれば、進入禁止信号は解除されない。よって、合流箇所C1を実際には通過可能であるのに、合流箇所C2を利用できない状況が続くという状況も生じ得る。しかるに本実施形態によれば、次に詳述する制御処理によって、故障による搬送効率へのダメージを、最小限に抑えられる。
(搬送システムの進入制御処理)
【0071】
次に、本実施形態に係る搬送システムの進入制御処理について図6を参照して説明する。図6は、本実施形態の進入制御処理を示すフローチャートである。尚、図6に示される進入制御処理において、図1のように、支軌道1a上を先にビークル3aが走行し、その後から支軌道1b上をビークル3bが走行する場合を想定する。
【0072】
図6において、先ず、ビークル3bが信号発信領域A2に侵入すると、ビークル3bの制御部9によって、ビークル3aから進入禁止信号が発信されているか否かが判定される(ステップS41)。この判定の結果、発信中でない場合に(ステップS41:NO)、信号発信領域A2にはビークル3aが存在していないものとして、一連の処理が終了される。これにより、ビークル3bは、信号発信領域A2内を通常走行し、信号発信領域A2を走行中には、進入禁止信号を支軌道1a側に向けて自ら発信する。
【0073】
一方、ステップS41の判定の結果により、進入禁止信号が発信中である場合に(ステップS41:YES)、発信側であるビークル3aについて、異常判定部9aにより、走行系の異常があるか否かが判定される(ステップS42)。この判定の結果、走行系の異常がある(即ち、走行系エラーコードが異常判定部9aから出力された)場合に(ステップS42:YES)、進入禁止信号は解除されないまま、一連の処理が終了される。これにより、ビークル3bの信号発信領域A2内への進入が禁止された状態は、継続される。
【0074】
一方、ステップS42の判定の結果、故障しているビークル3aについて、走行系の異常がない(即ち、走行系エラーコードが異常判定部9aから出力されない)場合に(ステップS42:NO)、故障しているビークル3aにおける現在位置特定部9bにより、バーコードリーダ4による最新のバーコード、及びエンコーダ6による走行位置に基づいて、故障しているビークル3aの停止位置が特定される(ステップS43)。続いて、地図情報テーブル30が参照されることで、特定された停止位置が、合流領域A1内(即ち、ビークル3aに衝突する位置)であるか否かが判定される(ステップS44)。この判定の結果、故障しているビークル3aの停止位置が合流領域A1内にあって、仮にビークル3bを走行させたのではビークル3aに衝突してしまう場合に(ステップS44:YES)、進入禁止信号は解除されないままで、一連の処理が終了される。
【0075】
一方、ステップS44の判定の結果、故障しているビークル3aの停止位置が、合流領域A1内にない場合に(ステップS44:NO)、進入禁止信号は解除される(ステップS45)。すると、ビークル3bは、故障しているビークル3aの脇を通過できる。これにより、一連の進入制御が終了される。
【0076】
このように、故障検知部10bより、信号発信領域A2内において、ビークル3aで停止を伴う故障が発生した場合、制御部9により、一のビークル3aの停止位置を基準として他のビークル3bが一のビークル3aに衝突するか否かが判定され、この判定の結果として、他のビークル3bが一のビークル3aに衝突しないと判定されれば、進入禁止信号は解除される。よって、この場合には、他のビークル3bは、停止されたままとされることはなく、合流箇所C1を通過できる。これにより、ビークル同士の衝突を防止しつつ、ビークルを効率良く稼働可能となる。
【0077】
本発明は、上述した実施形態に限られるものではなく、請求の範囲及び明細書全体から読み取れる発明の要旨或いは思想に反しない範囲で適宜変更可能であり、そのような変更を伴う搬送車もまた本発明の技術的範囲に含まれるものである。
【図面の簡単な説明】
【0078】
【図1】実施形態に係る軌道及び複数の搬送車の一例を示す模式図である。
【図2】実施形態に係る軌道及び複数の搬送車の他の例を示す模式図である。
【図3】実施形態に係る各搬送車の構成を示すブロック図である。
【図4】実施形態に係る異常判定手段に使用される、エラーコードを示すテーブルである。
【図5】実施形態に係る位置判定手段に使用される、地図情報を示すテーブルである。
【図6】実施形態に係る進入制御処理を示すフローチャートである。
【符号の説明】
【0079】
1…軌道、3…搬送車、7…送受信部、9…制御部、10…搬送コントローラ、100…搬送システム
【特許請求の範囲】
【請求項1】
合流箇所を有する軌道と、
該軌道上を夫々走行可能であると共に被搬送物を夫々搬送可能な複数の搬送車と、
前記軌道上における前記合流箇所を含む所定範囲内へ、前記複数の搬送車のうち一の搬送車が前記軌道の一部を介して進入した場合に、前記所定範囲内へ、前記複数の搬送車のうち他の搬送車が前記軌道の他部を介して進入することを禁止する旨の進入禁止信号を出力する進入制御手段と
を備え、
前記進入制御手段は、前記進入禁止信号が出力されている際に前記一の搬送車で停止を伴う故障が発生した場合に、前記一の搬送車の停止位置を基準として前記他の搬送車が前記一の搬送車に衝突するか否かを判定し、前記他の搬送車が衝突しないと判定された場合に、前記進入禁止信号を解除する
ことを特徴とする搬送システム。
【請求項2】
前記故障が発生した場合に、前記停止位置を特定する位置特定手段を更に備え、
前記進入制御手段は、前記特定された停止位置を基準として前記他の搬送車が衝突するか否かを判定する
ことを特徴とする請求項1に記載の搬送システム。
【請求項3】
前記軌道上における所定の軌道位置を付けられた識別マークと、
前記一の搬送車が前記所定の軌道位置を通過する際に、前記識別マークを検出するマーク検出手段と
を更に備え、
前記位置特定手段は、前記検出された識別マークに基づいて、前記停止位置を特定する
ことを特徴とする請求項2に記載の搬送システム。
【請求項4】
前記位置特定手段は、前記所定の軌道位置を基準とする前記軌道に沿った距離を、検出することで、前記停止位置を検出する位置検出手段を有することを特徴とする請求項3に記載の搬送システム。
【請求項5】
前記故障が発生した場合に、前記位置特定手段に異常があるか否かを判定する異常判定手段を更に備え、
前記進入制御手段は、前記異常があると判定されないことを条件に、前記他の搬送車が衝突するか否かを判定する、又は前記他の搬送車が衝突しないと判定された場合に前記進入禁止信号を解除する
ことを特徴とする請求項2から4のいずれか一項に記載の搬送システム。
【請求項6】
前記進入制御手段は、前記合流箇所を含むと共に前記所定範囲よりも小さく且つ前記一の搬送車が停止していると前記他の搬送車が前記一の搬送車に衝突する範囲として、予め設定されている合流領域内に、前記停止位置が入っているか否かにより、前記他の搬送車が衝突するか否かを判定することを特徴とする請求項1から5のいずれか一項に記載の搬送システム。
【請求項7】
前記合流領域を示す領域情報を、前記合流箇所並びに前記所定範囲若しくは前記合流領域に含まれる前記軌道上における軌道位置の少なくとも一方に対応付ける形で格納する記憶手段を更に備え、
前記進入制御手段は、前記停止位置に対応する前記少なくとも一方に対応付けられた前記領域情報を取得し、前記取得された領域情報により示される前記合流領域内に、前記停止位置が入っているか否かにより、前記他の搬送車が衝突するか否かを判定することを特徴とする請求項6に記載の搬送システム。
【請求項8】
前記進入制御手段は、少なくとも部分的に、前記搬送車に搭載されていることを特徴とする請求項1から7のいずれか一項に記載の搬送システム。
【請求項9】
前記進入制御手段は、前記進入禁止信号を前記一の搬送車側から発信し、
前記他の搬送車側は、前記進入禁止信号を受信すると、停止するように構成されている
ことを特徴とする請求項1から8のいずれか一項に記載の搬送システム。
【請求項10】
前記進入禁止信号が出力された場合に、前記他の搬送車の前記軌道上における走行経路を、前記合流箇所を迂回するものに変更する経路変更手段を更に備えることを特徴とする請求項1から9のいずれか一項に記載の搬送システム。
【請求項11】
前記他の搬送車が衝突すると判定された場合に、前記他の搬送車の前記軌道上における走行経路を、前記合流箇所を迂回するものに変更する経路変更手段を更に備えることを特徴とする請求項6又は7に記載の搬送システム。
【請求項12】
合流箇所を有する軌道上を走行可能であると共に被搬送物を搬送可能な搬送車であって、
前記軌道上における前記合流箇所を含む所定範囲内へ、前記軌道の一部を介して進入した場合に、前記所定範囲内へ、他の搬送車が前記軌道の他部を介して進入することを禁止する旨の進入禁止信号を出力する進入制御手段
を備え、
前記進入制御手段は、前記進入禁止信号が出力されている際に前記一の搬送車で停止を伴う故障が発生した場合に、当該搬送車の停止位置を基準として前記他の搬送車が当該搬送車に衝突するか否かを判定し、前記他の搬送車が衝突しないと判定された場合に、前記進入禁止信号を解除する
ことを特徴とする搬送車。
【請求項1】
合流箇所を有する軌道と、
該軌道上を夫々走行可能であると共に被搬送物を夫々搬送可能な複数の搬送車と、
前記軌道上における前記合流箇所を含む所定範囲内へ、前記複数の搬送車のうち一の搬送車が前記軌道の一部を介して進入した場合に、前記所定範囲内へ、前記複数の搬送車のうち他の搬送車が前記軌道の他部を介して進入することを禁止する旨の進入禁止信号を出力する進入制御手段と
を備え、
前記進入制御手段は、前記進入禁止信号が出力されている際に前記一の搬送車で停止を伴う故障が発生した場合に、前記一の搬送車の停止位置を基準として前記他の搬送車が前記一の搬送車に衝突するか否かを判定し、前記他の搬送車が衝突しないと判定された場合に、前記進入禁止信号を解除する
ことを特徴とする搬送システム。
【請求項2】
前記故障が発生した場合に、前記停止位置を特定する位置特定手段を更に備え、
前記進入制御手段は、前記特定された停止位置を基準として前記他の搬送車が衝突するか否かを判定する
ことを特徴とする請求項1に記載の搬送システム。
【請求項3】
前記軌道上における所定の軌道位置を付けられた識別マークと、
前記一の搬送車が前記所定の軌道位置を通過する際に、前記識別マークを検出するマーク検出手段と
を更に備え、
前記位置特定手段は、前記検出された識別マークに基づいて、前記停止位置を特定する
ことを特徴とする請求項2に記載の搬送システム。
【請求項4】
前記位置特定手段は、前記所定の軌道位置を基準とする前記軌道に沿った距離を、検出することで、前記停止位置を検出する位置検出手段を有することを特徴とする請求項3に記載の搬送システム。
【請求項5】
前記故障が発生した場合に、前記位置特定手段に異常があるか否かを判定する異常判定手段を更に備え、
前記進入制御手段は、前記異常があると判定されないことを条件に、前記他の搬送車が衝突するか否かを判定する、又は前記他の搬送車が衝突しないと判定された場合に前記進入禁止信号を解除する
ことを特徴とする請求項2から4のいずれか一項に記載の搬送システム。
【請求項6】
前記進入制御手段は、前記合流箇所を含むと共に前記所定範囲よりも小さく且つ前記一の搬送車が停止していると前記他の搬送車が前記一の搬送車に衝突する範囲として、予め設定されている合流領域内に、前記停止位置が入っているか否かにより、前記他の搬送車が衝突するか否かを判定することを特徴とする請求項1から5のいずれか一項に記載の搬送システム。
【請求項7】
前記合流領域を示す領域情報を、前記合流箇所並びに前記所定範囲若しくは前記合流領域に含まれる前記軌道上における軌道位置の少なくとも一方に対応付ける形で格納する記憶手段を更に備え、
前記進入制御手段は、前記停止位置に対応する前記少なくとも一方に対応付けられた前記領域情報を取得し、前記取得された領域情報により示される前記合流領域内に、前記停止位置が入っているか否かにより、前記他の搬送車が衝突するか否かを判定することを特徴とする請求項6に記載の搬送システム。
【請求項8】
前記進入制御手段は、少なくとも部分的に、前記搬送車に搭載されていることを特徴とする請求項1から7のいずれか一項に記載の搬送システム。
【請求項9】
前記進入制御手段は、前記進入禁止信号を前記一の搬送車側から発信し、
前記他の搬送車側は、前記進入禁止信号を受信すると、停止するように構成されている
ことを特徴とする請求項1から8のいずれか一項に記載の搬送システム。
【請求項10】
前記進入禁止信号が出力された場合に、前記他の搬送車の前記軌道上における走行経路を、前記合流箇所を迂回するものに変更する経路変更手段を更に備えることを特徴とする請求項1から9のいずれか一項に記載の搬送システム。
【請求項11】
前記他の搬送車が衝突すると判定された場合に、前記他の搬送車の前記軌道上における走行経路を、前記合流箇所を迂回するものに変更する経路変更手段を更に備えることを特徴とする請求項6又は7に記載の搬送システム。
【請求項12】
合流箇所を有する軌道上を走行可能であると共に被搬送物を搬送可能な搬送車であって、
前記軌道上における前記合流箇所を含む所定範囲内へ、前記軌道の一部を介して進入した場合に、前記所定範囲内へ、他の搬送車が前記軌道の他部を介して進入することを禁止する旨の進入禁止信号を出力する進入制御手段
を備え、
前記進入制御手段は、前記進入禁止信号が出力されている際に前記一の搬送車で停止を伴う故障が発生した場合に、当該搬送車の停止位置を基準として前記他の搬送車が当該搬送車に衝突するか否かを判定し、前記他の搬送車が衝突しないと判定された場合に、前記進入禁止信号を解除する
ことを特徴とする搬送車。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2010−15231(P2010−15231A)
【公開日】平成22年1月21日(2010.1.21)
【国際特許分類】
【出願番号】特願2008−172291(P2008−172291)
【出願日】平成20年7月1日(2008.7.1)
【出願人】(302059274)アシスト テクノロジーズ ジャパン株式会社 (146)
【Fターム(参考)】
【公開日】平成22年1月21日(2010.1.21)
【国際特許分類】
【出願日】平成20年7月1日(2008.7.1)
【出願人】(302059274)アシスト テクノロジーズ ジャパン株式会社 (146)
【Fターム(参考)】
[ Back to top ]