
搬送システム
【課題】例えば半導体素子製造用の各種基板を収容するFOUP等の荷を、ビークル等の搬送手段により搬送する搬送システムにおいて、簡単な構成により効率良く荷を搬送する。
【解決手段】搬送システム(100)は、第1経路(1)と、第1経路に沿って一の荷(3)を搬送すると共に該搬送される一の荷を移載可能な第1移載手段(5)を有する搬送車(2)と、少なくとも一箇所において、第1経路の側方における第1経路よりも下方を通る第2経路と、第2経路上で一の荷と同一又は異なる他の荷を搬送する搬送手段(30)と、一箇所における第2経路よりも下方に配置されたポートと、少なくとも一箇所において、搬送される他の荷を横移載方式でポートとの間で移載可能な第2移載手段(40)とを備える。第1移載手段は、一の荷を縦移載又は横移載方式でポートとの間で移載可能である。
【解決手段】搬送システム(100)は、第1経路(1)と、第1経路に沿って一の荷(3)を搬送すると共に該搬送される一の荷を移載可能な第1移載手段(5)を有する搬送車(2)と、少なくとも一箇所において、第1経路の側方における第1経路よりも下方を通る第2経路と、第2経路上で一の荷と同一又は異なる他の荷を搬送する搬送手段(30)と、一箇所における第2経路よりも下方に配置されたポートと、少なくとも一箇所において、搬送される他の荷を横移載方式でポートとの間で移載可能な第2移載手段(40)とを備える。第1移載手段は、一の荷を縦移載又は横移載方式でポートとの間で移載可能である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば半導体素子製造用の各種基板を収容するFOUP(Front Opening Unified Pod)等の荷を、ビークル等の搬送手段により搬送する搬送システムの技術分野に関する。
【背景技術】
【0002】
この種の搬送システムとして、例えばコンベアと、ロードポートを有するFOUPアドバンスプレートアセンブリとを備えており、FOUPアドバンスプレートアセンブリによりロードポートを昇降させることで、コンベアとの間でFOUPを移載可能である搬送システムがある(特許文献1参照)。
【0003】
【特許文献1】国際公開WO2006/091593号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した特許文献1によれば、FOUPの搬送がコンベアだけで行われる場合であって、ロードポートの昇降距離が比較的長い場合に、コンベアとの間で、1つのFOUPの移載が迅速に行われても、多数のFOUPの移載では、荷の数に比例してその昇降時間が増大してしまい、搬送効率が低下するという技術的課題がある。
【0005】
本発明は、例えば上述した問題点に鑑みなされたものであり、簡単な構成により効率良くFOUP等の荷を搬送することを可能ならしめる搬送システムを提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明の第1搬送システムは上記課題を解決するために、第1経路と、該第1経路に沿って一の荷を搬送すると共に該搬送される一の荷を移載可能な第1移載手段を有する搬送車と、少なくとも一箇所において、前記第1経路の側方における前記第1経路よりも下方を通る第2経路と、該第2経路上で前記一の荷と同一又は異なる他の荷を搬送する搬送手段と、前記一箇所における前記第2経路よりも下方に配置されたポートと、少なくとも前記一箇所において前記搬送される他の荷を横移載方式で前記ポートとの間で移載可能な第2移載手段とを備え、前記第1移載手段は、前記一の荷を縦移載又は横移載方式で前記ポートとの間で移載可能である。
【0007】
本発明の第1搬送システムによれば、第1又は第2移載手段により、搬送車又は搬送手段と、ポートとの間で荷を移載可能である。ここで「ポート」は、例えばFOUP等の荷を移載する場合に、荷が少なくとも一時的に載置される一時載置用棚等のバッファである。このようなポートは、例えば、ストッカ等の入出庫の際に載置可能なように、ストッカ等の入出庫口の付近に設けられる入出庫ポートであってもよい。搬送車は、例えば天井走行型のビークルであり、例えば天井に敷設されたレール等の第1経路に沿って走行する。搬送車は、例えば本体部と、第1移載手段とを有する。ここで「第1移載手段」は、例えばFOUP等の一の荷を保持するグリップ機構と、該グリップ機構を昇降させるホイスト機構とを備える。本体部は、一の荷を、グリップ機構及びホイスト機構ごと収容すると共に、第1経路に沿って走行するための走行機能を備える。第1移載手段は、例えばポートに対応する移載位置において、一の荷を、縦移載方式でポートとの間で移載可能である。ここで「縦移載方式」は、一の荷を、例えば移載位置に停止した搬送車の鉛直下方にあるポートに移載するための方式であって、ホイスト機構のみで移載可能である。或いは、第1移載手段は、例えば本体部からホイスト機構及びグリップ機構を横方向にせり出させるスライダ機構を更に備えており、例えば移載位置において、一の荷を、横移載方式でポートとの間で移載可能である。ここで「横移載方式」は、一の荷を、例えば移載位置に停止した搬送車の側方における、該搬送車よりも下方にあるポートに移載するための方式であって、ホイスト機構及びスライダ機構により移載可能である。
【0008】
搬送車及びポート間の移載について、一の荷が搬送車からポートへ移載される場合に、例えば、先ず搬送車により、一の荷が移載位置まで搬送される。次に、搬送車におけるホイスト機構又は/及びスライダ機構により、グリップ機構に保持されている一の荷が、ポートへ移載可能な位置(即ち、ポートの直上)に移動される。この後、一の荷がグリップ機構から解放され、ポートに載置(即ち、移載)される。
【0009】
また、一の荷がポートから搬送車へ移載される場合に、例えば、先ず搬送車が移載位置まで移動されると共に、ホイスト機構又は/及びスライダ機構により、グリップ機構が、該ポート上の一の荷を保持可能な位置に移動される。次に、該一の荷がグリップ機構に保持され、搬送車に移載される。
【0010】
第1搬送システムに係る搬送手段は、例えばローラコンベア、ベルトコンベア等のコンベア機構であり、第2経路上で、例えばFOUP等の他の荷を搬送する。ここで「他の荷」は、一の荷と同一又は異なる荷である。第2移載手段は、例えば第1移載手段と同様に、グリップ機構と、ホイスト機構と、スライダ機構とを有し、例えばポートに対応する移載位置において、搬送手段により搬送される他の荷を、横移載方式でポートとの間で移載可能である。ここで「横移載方式」は、他の荷を、例えば移載位置における第2経路よりも下方にあるポートに移載するための方式であって、ホイスト機構及びスライダ機構により移載可能である。第2移載手段は、例えば移載位置に設けられている。
【0011】
搬送手段及びポート間の移載について、他の荷が搬送手段からポートへ移載される場合に、例えば、先ず搬送手段により、他の荷が、移載位置まで搬送される。次に、第2移載手段におけるホイスト機構又は/及びスライダ機構により、グリップ機構が、該第2経路上の他の荷を保持可能である位置に移動される。次に、グリップ機構により、該他の荷が保持される。次に、グリップ機構に保持されている他の荷が、ポートへ移載可能な位置(即ち、ポートの直上)に移動される。この後、他の荷がグリップ機構から解放され、ポートに載置(即ち、移載)される。
【0012】
また、他の荷がポートから搬送手段へ移載される場合に、例えば、先ず第2移載手段におけるホイスト機構又は/及びスライダ機構により、グリップ機構が、該ポート上の他の荷を保持可能な位置に移動される。次に、グリップ機構により、該他の荷が保持される。次に、ホイスト機構又は/及びスライダ機構により、グリップ機構に保持されている他の荷が、搬送手段へ移載可能な位置(即ち、移載位置に当たる第2経路の直上)に移動される。この後、他の荷がグリップ機構から解放され、該第2経路に載置(即ち、移載)される。
【0013】
尚、第1搬送システムは、例えば上述した搬送車及びポート間、若しくは搬送手段及びポート間で、荷の移載を行うだけでなく、ポートを介して、搬送車及び搬送手段間で移載を行うことも可能である。
【0014】
第1及び第2経路、並びにポートの構成について、第2経路は、少なくとも一箇所において、第1経路の側方における、該第1経路よりも下方を通る。ポートは、該一箇所における第2経路よりも下方であって、具体的には、例えば該一箇所における第1経路の鉛直下方に配置される。ここで「一箇所」は、例えば上述した「移載位置」である。このように第1及び第2経路、並びにポートを構成することで、2つの経路(即ち、第1及び第2経路)で、多数の荷を搬送すると共に、可動ポートを介して、搬送車及び搬送手段間で、荷を移載することができる。
【0015】
尚、ポートが、例えば移載位置に停止した搬送車の鉛直下方に配置される場合に、縦移載方式で移載可能であるため、搬送車は、スライダ機構を備えない。このため、オーバーヘッドホイスト等のスライダ機構を装備する場合と比較して、搬送速度を増速することができる。
【0016】
以上のように、第1及び第2経路で多数の荷を搬送すると共に、第1及び第2移載手段により、ポートを介して、搬送車及び搬送手段の相互間で、荷の移載を迅速に行うので、比較的簡単な構成により効率良く荷を搬送することができる。
【0017】
本発明の第1搬送システムの一態様では、前記第2移載手段は、前記一箇所における前記第2経路の上方に敷設されている。
【0018】
この態様によれば、例えば移載位置における第2経路に他の荷が載置されると、載置された他の荷が、第2移載手段におけるグリップ機構により迅速に保持されるので、移載時間を短縮することができる。
【0019】
本発明の第1搬送システムの他の態様では、前記第2移載手段は、前記搬送される他の荷を保持可能な保持手段と、該保持手段を、前記第2経路の上方及び前記第1経路の下方の間で水平移動可能な水平移動手段と、前記第1経路の下方に移動された前記保持手段が保持している荷を、昇降可能な昇降手段とを備える。
【0020】
この態様によれば、第2移載手段は、例えば上述したグリップ機構である保持手段と、例えば上述したスライダ機構である水平移動手段と、例えば上述した昇降機構である昇降手段とを備える。これらの機構は、例えば初期設定として、移載時を除いて、移載位置における第2経路の上方に配置されている。
【0021】
ポートが、例えば移載位置における第1経路の下方に配置されており、第2移載手段が、例えば移載位置における第2経路の上方に敷設されている。この場合に、搬送手段からポートへ他の荷を移載するには、例えば昇降手段により、保持手段が、第2経路上の他の荷を保持可能な位置まで下降され、保持手段により、第2経路上の他の荷が保持される。次に、水平移動手段により、保持手段が第2経路の上方から第1経路の下方に移動される。次に、昇降手段により、保持手段が、ポートへ移載可能な位置(即ち、ポートの直上)に移動される。この後、他の荷が保持手段から解放され、ポートに載置(即ち、移載)される。
【0022】
また、ポートから搬送手段へ他の荷を移載するには、例えば昇降手段及び水平移動手段により、保持手段が、第1経路の下方に移動されると共に、ポート上の他の荷を保持可能な位置(即ち、ポートの直上)に移動される。次に、保持手段により、ポート上の他の荷が保持される。次に、昇降手段及び水平移動手段により、保持手段が、移載位置における第2経路の上方に移動されると共に、移載位置における第2経路へ移載可能な位置(即ち、該第2経路の直上)に移動される。この後、他の荷が保持手段から解放され、該第2経路上に載置(即ち、移載)される。
【0023】
以上のように、第2移載手段を構成することで、搬送手段(言い換えれば、第2移載手段)及びポート間で、縦移載方式による移載を行うことができる。
【0024】
本発明の第1搬送システムの他の態様では、前記ポートは、昇降可能なリフターにおける載置面から構成されている。
【0025】
この態様によれば、ポートは、例えば荷を載置するための載置面を備える載置部である。リフターは、例えば該載置部と、レールと、アクチュエータとを有し、アクチュエータの駆動により、鉛直方向と平行に延びるレールに沿って、載置部(即ち、ポート)を上下移動させる。このようなリフターは、例えば、ストッカの側面に沿って設けられたレールに沿って昇降し、該側面に鉛直に配列された複数の入出庫口のうちの一つに対向する位置で又は該側面に一つ設けられた入出庫口に対向する位置で停止可能とされる。
【0026】
リフターの動作について、具体的には、例えば第2移載手段からポートへ他の荷が移載される場合に、例えば、先ずアクチュエータの駆動により、ポートが、レールに沿って最上の配置位置まで移動される。次に、他の荷を保持している保持手段が、昇降手段及び水平移動手段により、最上の配置位置にあるポートへ移載可能な位置(即ち、ポートの直上)に移動される。該移載可能な位置は、昇降手段により移動される距離が最短となるように設定されている。この後、他の荷が保持手段から解放され、ポートに載置(即ち、移載)される。ポートに対応する高さに移動される。
【0027】
また、ポートから第2移載手段へ他の荷が移載される場合に、例えば、先ずアクチュエータの駆動により、他の荷を載置しているポートが、レールに沿って最上の配置位置まで移動される。この後、保持手段が、昇降手段及び水平移動手段により、最上の配置位置にあるポート上の他の荷を保持可能な位置(即ち、ポートの直上)に移動される。次に、保持手段により、ポート上の他の荷が保持され、第2移載手段に移載される。
【0028】
以上のように、移載に伴って、ポートを機能させることで、第2移載手段又は搬送車と、ポートとの間で移載される荷の移動距離が最短となり、移載時間を短縮することができる。
【0029】
この態様では、少なくとも一箇所において前記第2経路の下方を通る第3経路を更に備え、該第3経路には、前記リフターが下降する際に前記リフターが下方へ通過するのを許容する口又は切れ込みが設けられており、前記リフターが通過するのに伴って前記リフターに載置された前記一の荷又は他の荷を受ける支持部を含んでもよい。
【0030】
このように構成すれば、リフターは、例えば口又は切れ込みを介して、支持部をその上方から下方へ通過することで、支持部との間で荷(即ち、一の荷又は他の荷)を移載する。該移載動作について、具体的には、例えば荷を載置しているリフター(実際には、載置部(即ち、ポート))が、口又は切れ込みを通過して、支持部の下方へ移動される。これに伴って、リフターに載置された荷が、リフターに代わって支持部に支持される。このように、リフターを下方へ移動させるといった比較的簡単な構成により、DLT(Direct Load Transport)方式で、ポートから第3経路へ効率良く荷を移載することができる。また、上述した第3経路へ荷を移載する動作の逆の動作により、DLT方式で、第3経路からリフターへ(更にはポート等へ)荷を効率良く移載することも可能である。
【0031】
前記第3経路に前記支持部を含んでいる態様では、前記リフター及び前記支持部は、前記一の荷又は他の荷が前記支持部に載置された状態において、前記リフターが前記第3経路の下方から上方に向けて前記口又は切込みを通過するのに伴って前記支持部に載置された前記一の荷又は他の荷を前記リフターで受けるように構成されていてもよい。
【0032】
このように構成すれば、リフターは、例えば口又は切れ込みを介して、荷(即ち、一の荷又は他の荷)を載置した状態にある支持部をその下方から上方へ通過することで、支持部から荷を移載する。該移載動作について、具体的には、例えば支持部の下方にあるリフターが、口又は切れ込みを通過して、支持部の上方へ移動される。これに伴って、支持部に載置されている荷が、支持部に代わってリフターに支持される。このように、リフターを上下移動させるといった比較的簡単な構成により、第3経路との間の移載を行うことで、更に効率良く荷をDLT方式で移載することができる。
【0033】
前記ポートがリフターにおける載置面から構成されている態様では、前記リフターが昇降する軌道に隣接して配置されており、前記一又は他の荷を保管するストッカ及び前記一又は他の荷に対して所定種類の処理を施す処理装置のうち少なくとも一方の装置を更に備え、前記少なくとも一方の装置及び前記リフターは、前記リフターが前記少なくとも一方の装置に対する出入用の位置に停止した際に、前記少なくとも一方の装置と前記リフターとの間で、前記一又は他の荷を移載可能に構成されていてもよい。
【0034】
このように構成すれば、ストッカ及び処理装置のうち少なくとも一方の装置は、例えば出入用の位置に隣接して、リフターとの間で荷を移載するための移載面が設定されている。少なくとも一方の装置又はリフターは、例えば外内移動手段を備える。外内移動手段は、例えば少なくとも一方の装置とリフターとの間で、荷(即ち、一の荷又は他の荷)を移載可能である。外内移動手段は、例えばリフターにおける載置面を回動させる回動機構、スライドさせるスライド機構、又は該載置面と少なくとも一方の装置における移載面との間で移載可能なロボットアーム等を備える。
【0035】
少なくとも一方の装置がストッカであって、リフターからストッカへ荷が移載される場合に、例えば、先ず荷を載置しているリフター(実際には、載置面)が、出入用の位置まで上下移動される。次に、例えば回動機構である外内移動手段により、載置面が回動され、載置面上の荷が、ストッカにおける移載面に移動(即ち、移載)される。
【0036】
また、ストッカからリフターへ荷が移載される場合に、例えば、先ず空荷の状態にあるリフター(実際には、載置面)が、出入用の位置まで上下移動される。次に、ストッカにおける移載面に載置されている荷が、例えばロボットアームである外内移動手段により、リフターに移載される。
【0037】
以上のように、例えば外内移動手段により、少なくとも一方の装置とリフターとの間で、効率良く迅速に荷を移載することができる。
【0038】
本発明の第2搬送システムは上記課題を解決するために、荷をその底側から支持可能な第1支持部を有し、昇降可能な可動ポートと、(i)該可動ポートの上方を通過する第1経路に沿って一の荷を搬送すると共に該搬送される一の荷を縦移載又は横移載方式で前記可動ポートとの間で移載可能な第1搬送系、並びに(ii)少なくとも一箇所において、前記第1経路の側方における前記第1経路よりも下方を通る第2経路上で前記一の荷と同一又は異なる他の荷を搬送すると共に少なくとも前記一箇所において前記搬送される他の荷を横移載方式で前記可動ポートとの間で移載可能な第2搬送系のうち少なくとも一方と、少なくとも一箇所において前記第1又は第2経路の下方を通る第3経路とを備え、該第3経路には、前記可動ポートが下降する際に前記第1支持部が下方へ通過するのを許容する口又は切れ込みが設けられており、前記第1支持部が通過するのに伴って前記第1支持部に載置された前記一の荷又は他の荷を受ける第2支持部を含む。
【0039】
本発明の第2搬送システムによれば、例えば第1搬送系又は第2搬送系又は第3経路と、可動ポートとの間で荷を移載可能である。ここで「可動ポート」は、例えばFOUP等の荷を移載する場合に、荷が少なくとも一時的に載置される一時載置用棚等のバッファである。可動ポートは、例えば第1支持部と、レールと、アクチュエータとを有するリフターであり、アクチュエータの駆動により、鉛直方向と平行に延びるレールに沿って、第1支持部を上下移動させる。このような可動ポートは、例えば、ストッカ等の入出庫の際に載置可能なようにストッカ等の入出庫口の付近に設けられる入出庫ポートであってもよい。この場合、可動ポートであるリフターは、例えば、ストッカの側面に沿って設けられたレールに沿って昇降し、該側面に鉛直に配列された複数の入出庫口のうちの一つに対向する位置で又は該側面に一つ設けられた入出庫口に対向する位置で停止可能とされる。
【0040】
第1搬送系は、例えばOHT(Overhead Hoist Transport)(即ち、天井走行型の搬送車)であり、例えば天井に敷設されたレール等の第1経路に沿って走行する。この場合に、第1搬送系は、例えば本体部と、第1移載手段とを有する。ここで「第1移載手段」は、例えばFOUP等の一の荷を保持するグリップ機構と、該グリップ機構を昇降させるホイスト機構とを備える。本体部は、一の荷を、グリップ機構及びホイスト機構ごと収容すると共に、第1経路に沿って走行するための走行機能を備える。第1移載手段は、例えば可動ポートに対応する移載位置において、一の荷を、縦移載方式でポートとの間で移載可能である。ここで「縦移載方式」は、一の荷を、例えばホイスト機構のみで、第1搬送系と、可動ポートとの間で移載可能である。更に、第1移載手段は、例えば本体部からホイスト機構及びグリップ機構を横方向にせり出させるスライダ機構を更に備えており、例えば移載位置において、一の荷を、横移載方式でポートとの間で移載可能である。ここで「横移載方式」は、一の荷を、例えばホイスト機構及びスライダ機構により、第1搬送系と、可動ポートとの間で移載可能である。
【0041】
第2搬送系は、例えば搬送手段と、第2移載手段とを備える。搬送手段は、例えばローラコンベア、ベルトコンベア等のコンベア機構であり、第2経路上で、例えばFOUP等の他の荷を搬送する。ここで「他の荷」は、一の荷と同一又は異なる荷である。第2移載手段は、例えば第1移載手段と同様に、グリップ機構と、ホイスト機構と、スライダ機構とを有し、例えばポートに対応する移載位置において、移載位置に搬送される他の荷を、横移載方式でポートとの間で移載可能である。ここで「横移載方式」は、他の荷を、例えばホイスト機構及びスライダ機構により、第2搬送系と、可動ポートとの間で移載可能である。
【0042】
第3経路は、例えばDLT(Direct Load Transport)を構成する一要素であり、例えば搬送手段を含む。第3経路における搬送手段は、例えばローラコンベア、ベルトコンベア等のコンベア機構であって、第2支持部を含んでおり、第3経路上で、荷(即ち、一の荷又は他の荷)を搬送する。
【0043】
第1及び第2支持部は、例えば荷の底面における相異なる部分(典型的には、中央寄り部分と周辺寄り部分)を支持するように構成されており、どちらか一方で荷を支持することが可能である。
【0044】
可動ポートにおける第1支持部は、口又は切れ込みを介して、第2支持部をその上方から下方へ通過することで、第2支持部との間で荷を移載する。具体的には、例えば荷を載置している第1支持部が、口又は切れ込みを通過して、第2支持部の下方へ移動される。これに伴って、第1支持部に載置された荷が、第1支持部に代わって、第2支持部に支持される。このように、例えばリフターを下方へ移動させるといった比較的簡単な構成により、DLT方式で、可動ポートから第3経路へ効率良く移載することができる。また、上述した第3経路へ荷を移載する動作の逆の動作により、DLT方式で、第3経路から可動ポートへ荷を効率良く移載することも可能である。
【0045】
第1から第3経路、並びに可動ポートの構成について、第1経路は、可動ポートの上方であって、具体的には、例えば可動ポートの鉛直上方を通過する。第2経路は、少なくとも一箇所において、第1経路の側方における、該第1経路よりも下方を通る。第3経路は、少なくとも一箇所において、第1及び第2経路の下方であって、具体的には、例えば第1経路が通過する可動ポートの鉛直下方に配置される。ここで「一箇所」は、例えば上述した「移載位置」である。このように第1から第3経路、並びに可動ポートを構成することで、3つの経路(即ち、第1から第3経路)で、多数の荷を搬送すると共に、可動ポートを介して、第1搬送系、第2搬送系、及び第3経路の相互間で、荷を移載することができる。
【0046】
尚、第1経路が、例えば可動ポートの鉛直上方に配置される場合に、縦移載方式で移載可能であるため、搬送車は、スライダ機構を備えない。このため、オーバーヘッドホイスト等のスライダ機構を装備する場合と比較して、搬送速度を増速することができる。
【0047】
第1から第3経路、並びに可動ポートは、例えば上述したように構成される。この場合に、可動ポートを介して、第1経路から第3経路へ荷を移載するには、例えば、先ず可動ポートにおける第1支持部が、例えばレールに沿って最上の配置位置まで移動される。次に、第1搬送系における第1移載手段により、第1経路に沿って搬送される荷が保持され、縦移載方式で、最上の配置位置にある第1支持部に移載される。次に、第1経路からの荷を載置した状態にある第1支持部が、第3経路における口又は切れ込みを介して、第2支持部の下方へ移動されると、第1支持部上の荷が、第1支持部に代わって第2支持部に支持(即ち、移載)される。
【0048】
また、可動ポートを介して、第3経路から第2経路へ荷を移載するには、例えば、先ず可動ポートにおける第1支持部が、第3経路における第2支持部の下方へ移動される。次に、第3経路における搬送手段により、該第2支持部まで、荷が搬送される。次に、第1支持部が、口又は切れ込みを介して、第2支持部の上方へ移動されると、第2支持部に載置されている荷が、第2支持部に代わって第1支持部に支持(即ち、移載)される。次に、第1支持部が、レールに沿って最上の配置位置まで移動される。次に、第2搬送系における第2移載手段により、第1支持部上の荷が保持され、横移載方式で、第2搬送系における搬送手段に移載される。
【0049】
以上のように、第1から第3経路で多数の荷を搬送すると共に、第1移載手段、第2移載手段、及び口及び切れ込みを介する移載により、可動ポートを介して、第1搬送系、第2搬送系、及び第3経路の相互間で、荷の移載を迅速に行うので、比較的簡単な構成により効率良く荷を搬送することができる。
【0050】
本発明の第2搬送システムの一態様では、前記第1支持部及び前記第2支持部は、前記一の荷又は他の荷が前記第2支持部に載置された状態において、前記第1支持部が前記第3経路の下方から上方に向けて前記口又は切込みを通過するのに伴って前記第2支持部に載置された前記一の荷又は他の荷を前記第1支持部で受けるように構成されている。
【0051】
この態様によれば、第1支持部が、口又は切れ込みを介して、荷(即ち、一の荷又は他の荷)を載置した状態にある第2支持部をその下方から上方へ通過することで、第2支持部から荷を移載する。該移載動作について、具体的には、例えば第2支持部の下方にある第1支持部が、口又は切れ込みを通過して、第2支持部の上方へ移動される。これに伴って、第2支持部に載置されている荷が、第2支持部に代わって第1支持部に支持される。このように、第1支持部を上下移動させるといった比較的簡単な構成により、第3経路との間の移載を行うことで、更に効率良く荷をDLT方式で移載することができる。
【0052】
本発明の第2搬送システムの他の態様では、前記可動ポートが昇降する軌道に隣接して配置されており、前記一又は他の荷を保管するストッカ及び前記一又は他の荷に対して所定種類の処理を施す処理装置のうち少なくとも一方の装置を更に備え、前記少なくとも一方の装置及び前記可動ポートは、前記可動ポートが前記少なくとも一方の装置に対する出入用の位置に停止した際に、前記少なくとも一方の装置と前記可動ポートとの間で、前記一又は他の荷を移載可能に構成されている。
【0053】
このように構成すれば、ストッカ及び処理装置のうち少なくとも一方の装置は、例えば出入用の位置に隣接して、可動ポートとの間で荷(即ち、一の荷又は他の荷)を移載するための移載面が設定されている。少なくとも一方の装置又は可動ポートは、例えば外内移動手段を備える。外内移動手段は、例えば少なくとも一方の装置と可動ポートとの間で、荷を移載可能である。外内移動手段は、例えば可動ポートにおける載置面を回動させる回動機構、スライドさせるスライド機構、又は該載置面と少なくとも一方の装置における移載面との間で移載可能なロボットアーム等を備える。
【0054】
少なくとも一方の装置がストッカであって、可動ポートからストッカへ荷が移載される場合に、例えば、先ず荷を載置している可動ポート(実際には、載置面)が、出入用の位置まで上下移動される。次に、例えば回動機構である外内移動手段により、載置面が回動され、載置面上の荷が、ストッカにおける移載面に移動(即ち、移載)される。
【0055】
また、ストッカから可動ポートへ荷が移載される場合に、例えば、先ず空荷の状態にある可動ポート(実際には、載置面)が、出入用の位置まで上下移動される。次に、ストッカにおける移載面に載置されている荷が、例えばロボットアームである外内移動手段により、可動ポートに移載される。
【0056】
以上のように、例えば外内移動手段により、少なくとも一方の装置と可動ポートとの間で、効率良く迅速に荷を移載することができる。
【0057】
尚、本発明の第2搬送システムにおいても、上述した本発明の第1搬送システムにおける各種態様と同様の各種態様を採ることが可能である。
【0058】
本発明の作用及び他の利得は次に説明する実施するための最良の形態から明らかにされる。
【発明を実施するための最良の形態】
【0059】
以下、本発明の実施形態について図を参照しつつ説明する。
【0060】
実施形態に係る搬送システムの構成について図1から図7を参照して説明する。
【0061】
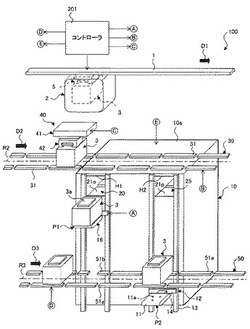
先ず、実施形態に係る搬送システムの概要について図1を参照して説明する。ここに図1は、実施形態に係る搬送システムの外観を示す。
【0062】
図1において、搬送システム100は、レール1、ビークル2、第1コンベア30、移載機構40、第2コンベア50、ポートP1及びP2、ストッカ10、並びにコントローラ201を備える。コントローラ201は、制御手段の一例としてプロセッサ、メモリ等を含んで構成され且つ搬送システム100の各部と接続されている。コントローラ201は、半導体素子製造工程に基づいて、FOUP3の搬送及び移載を、後に詳述するように管理又は制御する。
【0063】
FOUP3は、本発明に係る「一の荷」及び「他の荷」の一例として搬送の対象とされ、内部に、不図示の各種基板を複数収納可能である。FOUP3は、上面に、ビークル2又は移載機構40により保持されるフランジ3aを有し、底面に、ポートP1又はP2上の位置決めピン11aに係合される不図示の凹部を有する。FOUP3は、ビークル2、第1コンベア30、及び第2コンベア50により、ストッカ10や図示しない製造装置、OHTバッファ、大型ストッカ等に搬送される。
【0064】
レール1は、本発明に係る「第1経路」の一例として、ビークル2が走行するための軌道の役割を果たす。ビークル2は、本発明に係る「搬送車」の一例として、例えばリニアモータにより駆動されるOHTであり、FOUP3を、例えば搬送方向D1へ搬送する。ビークル2は、ホイスト機構5を有する。
【0065】
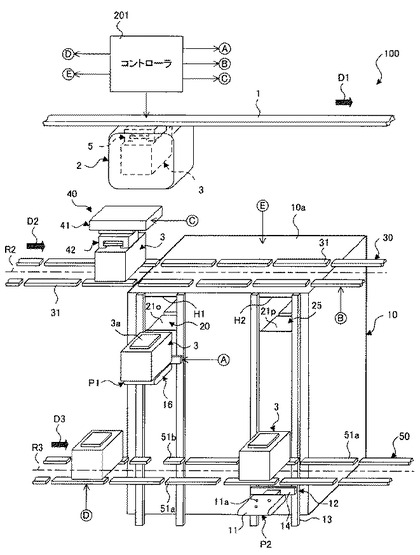
図2は、図1の搬送システムを側方(即ち、図1における右側方)から視た側面を図式的に示す。図2において、ホイスト機構5は、本発明に係る「第1移載手段」の一例として、本体部5a、ベルト6、グリップ7、及び不図示のモータを備える。ベルト6において、一端が本体部5aの図示しない巻き軸に固着されており、他端がグリップ7に固定されている。グリップ7は、フランジ3aを把持可能に、両端部が内側に向けて屈曲されている。グリップ7は、フランジ3aを把持する把持状態と、フランジ3aを解放する解放状態との間で変位可能である。本体部5aは、ベルト6の繰り出し又は巻き上げ動作により、グリップ7を上下移動させることで、FOUP3を上下移動させる。ビークル2は、ホイスト機構5によりFOUP3を上下移動させる縦移載方式で、ポートP1又はP2との間で、FOUP3を移載する。尚、ビークル2は、グリップ7のポートP1又はP2に対する位置(例えば、水平二方向及び回転方向についての位置)を微調整する調整機構を更に備えていてもよい。
【0066】
図1において、第1コンベア30は、本発明に係る「搬送手段」の一例として、複数のコンベア部分31、不図示の一対の支持壁、及びアクチュエータを備える。複数のコンベア部分31は、一対の支持壁の内側に、第2経路R2(図1において一点鎖線で示される)に沿って、且つ第2経路R2の両側に対を成すように取り付けられている。複数のコンベア部分31の各々は、例えばキャタピラー(登録商標)式コンベアであり、FOUP3の底面における端部(即ち、第2経路R2の延伸方向に対する左又は右端部)を支持する。第2経路R2の両側に位置する一対のコンベア部分31の各々は、FOUP3を1つ載置可能に夫々構成されている。第1コンベア30は、アクチュエータの駆動により、FOUP3が載置されている一対のコンベア部分31を同時に回動させることで、FOUP3を、例えば搬送方向D2へ搬送する。
【0067】
第2経路R2は、第1コンベア30により搬送されるFOUP3の経路である。図2において、第2経路R2(即ち、図2において一点鎖線の円で示される)は、レール1の側方(即ち、図2において、レール1の左側方)であって、レール1に沿って走行するビークル2よりも下方に延びている。
【0068】
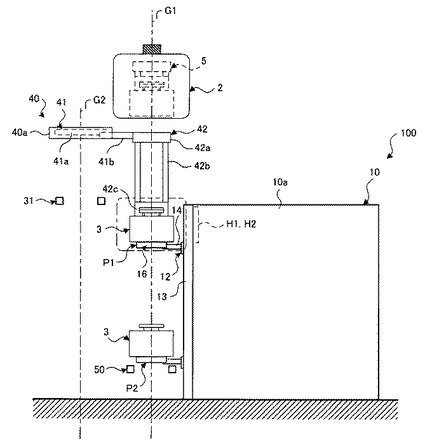
図2において、移載機構40は、本発明に係る「第2移載手段」の一例として、本体部40a、水平移動部41、及び上下移動部42を備えており、FOUP3を水平及び上下方向に移動させる横移載方式で、ポートP1又はP2との間で、FOUP3を移載する。
【0069】
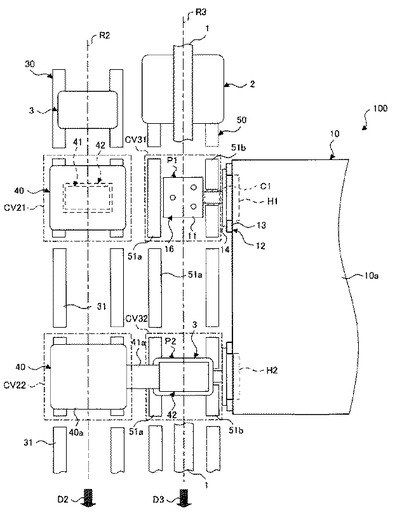
図4は、図1の搬送システムの上面を図式的に示す。図4において、本体部40aは、ポートP1又はP2に対応する移載位置CV21又はCV22(即ち、図4において、一点鎖線で示されるエリア)における第2経路R2の上方に設けられている。本体部40aには、水平移動部41が水平移動可能に取り付けられている。水平移動部41には、上下移動部42が水平移動可能に取り付けられている。
【0070】
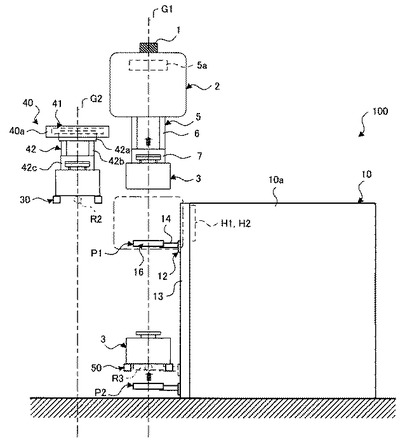
図3は、図2の搬送システムの側面を、搬送車による横移載の動作状態と共に模式的に示す。図3において、水平移動部41は、本発明に係る「水平移動手段」の一例として、本体部41a、レール41b、及び図示しないアクチュエータを備える。本体部41aの底面には、図示しない凹部が形成されており、該凹部にレール41bが嵌合されている。レール41bは、第2経路R2の上方と、本体部41aの側方(即ち、図3における右側方)との間で移動する。レール41bの下部には、上下移動部42の上部が嵌合されている。水平移動部41は、アクチュエータを駆動して、レール41bに沿って、上下移動部42を、レール41bが移動可能な位置より更に側方へ移動させる。このように、水平移動部41は、レール41bを介して、上下移動部42を、第2経路R2の上方と、レール1の下方との間で段階的に水平移動させる。
【0071】
上下移動部42は、本発明に係る「昇降手段」の一例として、ホイスト42a、ベルト42b、及びグリップ42cを備える。ホイスト42aは、本発明に係る「保持手段」の一例として、図示しないモータを備え、モータの駆動により、ベルト42bを繰り出す又は巻き上げる動作を行う。ベルト42bについて、一端がホイスト42aにおける図示しない巻き軸に固着されており、他端がグリップ42cに固定されている。グリップ42cは、FOUP3上面のフランジ3aを把持可能に、両端部が内側に向けて屈曲されている。グリップ42cは、フランジ3aを把持する把持状態と、フランジ3aを解放する解放状態との間で変位可能である。ホイスト42aは、ベルト42bの繰り出し又は巻き上げ動作により、グリップ42cを上下移動させる。尚、上下移動部42は、グリップ42cのポートP1又はP2に対する位置(例えば、水平二方向及び回転方向についての位置)を微調整する調整機構を更に備えていてもよい。
【0072】
本実施形態では、搬送システム100は、2つのポートP1及びP2を備えている。図1において、ポートP1が、ビークル2の搬送方向D1、第1コンベア30の搬送方向D2、及び第2コンベア50の搬送方向D3の上流側に配置され、ポートP2が、その下流側に配置されている。各ポートP1及びP2は、本発明に係る「リフター」及び「可動ポート」の一例として、ビークル2、第1コンベア30(実際には、移載機構40)、第2コンベア50、及びストッカ10の相互間で、FOUP3を移載するためのポートである。各ポートP1及びP2は、FOUP3を載置するための載置面11を備える。載置面11は、本発明に係る「第1支持部」の一例として、FOUP3の中央部をその底側から支持する。載置面11の上面には、位置決めピン11aが取り付けられている。位置決めピン11aは、移載されるFOUP3の凹部に係合される。
【0073】
図1において、各ポートP1又はP2は、本実施形態では、昇降機構12及びスライド機構16を備える。昇降機構12は、ストッカ10における2つの開口H1及びH2に対応して、2つ設けられている。昇降機構12は、各ポートP1及びP2に対して、一対のレール13、支持部14、及び不図示のアクチュエータを備える。一対のレール13は、ストッカ10の外壁(即ち、図1における正面)において、各開口H1及びH2の両側に、その長手方向が上下方向に取り付けられている。支持部14は、各ポートP1及びP2における載置面11を支持する。支持部14の一端部は、一対のレール13に嵌合されている。昇降機構12は、アクチュエータを駆動して、支持部14を一対のレール13に沿って上下移動させることで、各ポートP1及びP2を、後述の第1載置部21a又は21dに対向する位置に独立して移動させる。ストッカ10との間でFOUP3を移載する場合に、昇降機構12は、ポートP1又はP2を、開口H1又はH2に対応する移載位置に停止させる。移載位置は、本発明に係る「出入用の位置」の一例であり、ポートP1又はP2と、ストッカ10との間でFOUP3を移載可能な位置である。
【0074】
図4において、スライド機構16は、外内移動手段の一例として、2つのポートP1及びP2に対応して、2つ設けられている。スライド機構16は、各ポートP1及びP2に対して、不図示の一対のローラ、輪状の回動帯、及びアクチュエータを備える。輪状の回動帯は、一対のローラを取り巻くように、一対のローラに取り付けられている。輪状の回動帯の一部は、各ポートP1及びP2における載置面11として機能する。昇降機構12により、ポートP1又はP2が、ストッカ10における移載位置(即ち、図5において、点線で示される上下位置)に停止されると、スライド機構16は、アクチュエータを駆動して、一対のローラを回転させることで、輪状の回動帯を回動させる。この回動により、ポートP1又はP2上のFOUP3が、後述する開口H1又はH2を介して、ストッカ10における第1載置部21a又は21dに水平移動される。又は、第1載置部21a又は21d上のFOUP3が、ポートP1又はP2における載置部11上の位置決めピン11aに係合されるように、水平移動される。このように、スライド機構16は、ポートP1又はP2と、ストッカ10との間でFOUP3を移載する。
【0075】
第2コンベア50は、複数のコンベア部分51、不図示の一対の支持壁、及びアクチュエータを備える。複数のコンベア部分51は、一対の支持壁の内側に、第3経路R3(即ち、図1において一点鎖線で示される)に沿って、且つ第3経路R3の両側に対を成すように取り付けられている。複数のコンベア部分31の各々は、例えばキャタピラー(登録商標)式コンベアであり、本発明に係る「支持部」及び「第2支持部」の一例として、FOUP3の底面における端部(即ち、第3経路R3の延伸方向に対する左又は右端部)を支持する。第3経路R3の両側に位置する一対のコンベア部分51の各々は、FOUP3を1つ載置可能に夫々構成されている。第2コンベア50は、アクチュエータの駆動により、FOUP3が載置されている一対のコンベア部分51を同時に回動させることで、FOUP3を、例えば搬送方向D3へ搬送する。
【0076】
第3経路R3は、第2コンベア50により搬送されるFOUP3の経路である。図2において、第3経路R3(即ち、図2において一点鎖線の円で示される)は、レール1及び第2経路R2の下方に、詳細には、レール1の鉛直下方に延びている。
【0077】
図4において、複数のコンベア部分51は、本実施形態では、第3経路R3に沿った長さが異なる、第1コンベア部分51a、及び第2コンベア部分51bから構成される。第2コンベア50において、ポートP1に対応する移載位置CV31(即ち、図4において一点鎖線で示されるエリア)には、1つの第1コンベア部分51aと、2つの第2コンベア部分51bとが係っている。2つの第2コンベア部分51bは、その間に貫通口C1(即ち、図4において、エリアCV31内に一点鎖線で示されるエリア)を隔てて、不図示の支持壁に取り付けられている。貫通口C1は、本発明に係る「口又は切れ込み」の一例として、ポートP1(実際には、支持部14)が第2コンベア部分51bを貫通するための開口である。昇降機構12は、この貫通口C1を介して、ポートP1を、移載位置CV31におけるコンベア部分51(即ち、第1コンベア部分51a及び2つの第2コンベア部分51b)の上方及び下方間で移動させる。尚、第2コンベア50について、ポートP1に対応する移載位置CV31と同様に、ポートP2に対応する移載位置CV32が設定されており、移載位置CV32には、1つの第1コンベア部分51aと、2つの第2コンベア部分51bとが係っている。
【0078】
第2コンベア50及びポート(即ち、ポートP1又はP2)間におけるFOUP3の移載について、図2から図4を参照して説明する。図2において、第2コンベア50からポートP1又はP2へFOUP3を移載する場合に、昇降機構12は、載置面11を、コンベア部分51の下方から上方へ移動させる。この際、載置面11が、第1コンベア部分51a及び第2コンベア部分51b間に入り込み、昇降機構12における支持部14が、2つの第2コンベア部分51b間に入り込む。続いて、載置面11が更に上方へ移動され、第1コンベア部分51a及び2つの第2コンベア部分51bに支持されていないFOUP3の中央部が、載置面11に支持されることで、FOUP3がコンベア部分51(即ち、第2コンベア50)から載置面11(即ち、ポートP1又はP2)に移載される。
【0079】
ポートP1又はP2から第2コンベア50へFOUP3を移載する場合に、昇降機構12は、FOUP3を支持している載置面11を、コンベア部分51の上方から下方まで移動させる。この際、FOUP3の中央部を支持している載置面11が、第1コンベア部分51a及び第2コンベア部分51b間に入り込み、昇降機構12における支持部14が、2つの第2コンベア部分51b間に入り込む。続いて、載置面11が更に下方へ移動され、載置面11に支持されていないFOUP3の両端部が、第1コンベア部分51a及び2つの第2コンベア部分51bに支持されることで、FOUP3が載置面11(即ち、ポートP1又はP2)からコンベア部分51(即ち、第2コンベア50)に移載される。
【0080】
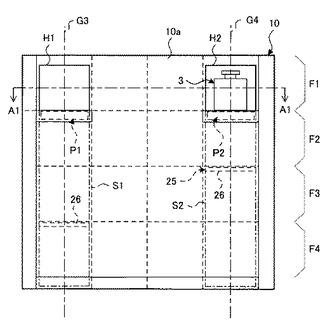
図5は、図1のストッカの正面を図式的に示す。図5において、ストッカ10は、本体部10a、及び保管庫内搬送部20を備えており、ポートP1及びP2が昇降する軌道G3及びG4に隣接して配置されている。
【0081】
本体部10aは、4つの段F1〜F4に鉛直方向に均等に分断されている。4つの段F1〜F4のうち最上段F1における一側面(即ち、図1における前面)には、所定の水平距離を隔てて2つの開口H1及びH2が設けられている。各開口H1及びH2は、FOUP3を本体部10aの外内に出し入れ可能なサイズに形成されている。図4において、2つの開口H1及びH2は、レール1、第2経路R2、及び第3経路R3に沿って並んでいる。ストッカ10における移載位置は、開口H1又はH2と、載置面11に載置されたFOUP3とが対向するように、ポートP1又はP2が配置される上下位置である。
【0082】
図1において、保管庫内搬送部20は、本体部10a内に、複数の載置部21、及びストッカ内昇降機構25を備える。保管庫内搬送部20は、複数の載置部21を総括的に制御して、各段F1〜F4において、複数のFOUP3を独立して搬送(即ち、保管庫内搬送)すると共に、ストッカ内昇降機構25を上下移動させることで、複数段F1〜F4間で、複数のFOUP3を相互に移動させる。
【0083】
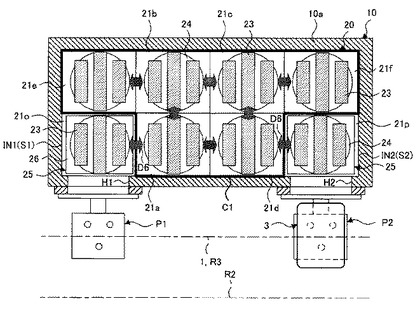
図6は、複数の載置部の配列を示し、図7は、図6の複数の載置部の回転後の状態を示す。図6及び図7は、具体的には、図5におけるA1−A1断面に相当しており、ストッカ10の最上段F1に配列される複数の載置部21を示している。図6において、本体部10aの内部におけるエリアIN1又はIN2は、開口H1又はH2に隣接している。また、空間S1又はS2(即ち、図5に一点鎖線で示される)は、エリアIN1又はIN2を含む鉛直に延びる空間である。本体部10aの外部において、開口H1又はH2に隣接するエリアには、ポートP1又はP2が配置されている。
【0084】
保管庫内搬送部20の構成について、図6及び図7を参照して詳しく説明する。図6において、保管庫内搬送部20は、複数の載置部21により、複数の載置部21間でFOUP3を水平移動させることで、各階F1〜F4において独立して保管庫内搬送を行う。複数の載置部21は、各階F1〜F4において、空間S1及びS2を除くエリアC1(即ち、図6及び図7において太線で示される)に、水平二方向(即ち、図6における左右方向及び上下方向)に広がるように6つ配列されている。各載置部21は、回転載置部21a〜21fであって、これら6つの回転載置部21a〜21fのうち、空間S1又はS2に隣接する2つの回転載置部は、第1載置部21a及び21dとして夫々設定されている。
【0085】
複数の載置部21は、本実施形態では、各段F1〜F4における6つの載置部21の他に、空間S1及びS2の各々に、1つずつ配置されている。空間S1及びS2に配置されている2つの載置部21は、複数段F1〜F4に共通の回転載置部21o及び21pであり、ストッカ内昇降機構25により、空間S1又はS2内で上下移動される。
【0086】
ストッカ内昇降機構25は、空間S1及びS2に夫々設けられている。ストッカ内昇降機構25は、空間S1又はS2に対して、例えば、不図示の一対のレール、支持部26と、不図示のアクチュエータとを備える。一対のレールは、空間S1又はS2内に、その長手方向が上下方向に取り付けられている。支持部26は、空間S1又はS2における回転載置部21o又は21pを支持する。支持部26の端部は、一対のレールに嵌合されている。ストッカ内昇降機構25は、アクチュエータを駆動して、支持部26を一対のレールに沿って上下移動させることで、回転載置部21o又は21pを、各段F1〜F4における第1載置部21a又は21dに対向する位置(以下、単に「各段F1〜F4に対応する位置」と言う)に独立して移動させる。ストッカ内昇降機構25により、各段F1〜F4に対応する位置に移動された回転載置部21o又は21pは、各段F1〜F4における第1載置部21a又は21dとの間で、FOUP3を独立して水平移動させる。また、最上段F1に対応する位置(即ち、エリアIN1又はIN2)に移動された回転載置部21o又は21pは、ポートP1又はP2との間で、開口H1又はH2を介してFOUP3を独立して水平移動させる。
【0087】
図6に示すように、2つの回転載置部21o及び21pが、エリアIN1又はIN2にある場合に、8つの載置部21(即ち、載置部21a〜21f,21o及び21p)は、相互間でFOUP3を水平移動させる。8つの載置部21の各々は、ローラ23と、不図示のアクチュエータとを有する。ローラ23は、アクチュエータにより回転される。各ローラ23の上面は、FOUP3が収容又は載置される載置面として機能する。FOUP3の水平移動について、具体的には、FOUP3が載置部21bに収容又は載置されている場合に、載置部21bにおけるローラ23が右回転されると、FOUP3が載置部21bの右隣りの載置部21cへ水平移動される。また、この場合に、載置部21bにおけるローラ23が左回転されると、FOUP3が載置部21bの左隣りの載置部21eへ水平移動される。尚、各載置部21は、ローラ23の回転によるローラコンベア式移動を行うが、その他に、ベルト等の回動によるベルトコンベア式移動を行ってもよい。
【0088】
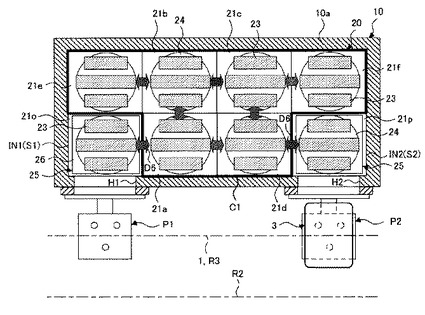
8つの載置部21、即ち、8つの回転載置部21a〜21f,21o及び21pの各々は更に、ターンテーブル24と、不図示のアクチュエータとを有し、FOUP3の移動方向及びその姿勢を90度回転させる。ターンテーブル24は、ローラ23の下方に配置されており、不図示の軸受けを介して、ローラ23を固定している。ターンテーブル24は、アクチュエータにより水平面内で90度回転され、ローラ23を水平面内で90度回転させる。具体的には、図6の状態にある8つの回転載置部21a〜21f,21o及び21pにおいて、ターンテーブル24が90度右回転されると、図7に示すように、ローラ23が一体となって90度右回転される。この回転により、回転載置部21a〜21f,21o及び21pに収容又は載置されているFOUP3の移動方向及びその姿勢が90度右回転される。また、ターンテーブル24が90度左回転されると、ローラ23が一体となって90度左回転される。この回転により、回転載置部21a〜21f,21o及び21pに収容又は載置されているFOUP3の移動方向及びその姿勢が90度左回転される。
(搬送車及び搬送手段間の移載動作)
【0089】
次に、本実施形態に係る搬送システムにおける、搬送車及び搬送手段間の移載動作について、図2から図4を参照して説明する。
【0090】
図2において、ビークル2から第1コンベア30への移載時には、先ず第1コンベア30により、FOUP3を保持した状態にあるビークル2が、レール1における移載位置CV31又はCV32(即ち、図4で示される)で停止される。すると、昇降機構12により、ポートP1又はP2が、最も高い上下位置に移動される。この後、ホイスト機構5により、FOUP3を保持した状態にあるグリップ7が、ポートP1又はP2における載置面11の直上に移動される。すると、移動されたグリップ7により、FOUP3が解放され、載置面11に移載される。この際、載置面11上面の位置決めピン11aがFOUP3の凹部に係合される。
【0091】
この後、図3において、水平移動部41及び上下移動部42により、解放状態にあるグリップ42cが、載置面11上のFOUP3の直上に移動される。すると、移動されたグリップ42cにより、FOUP3が保持される。続けて、水平移動部41及び上下移動部42により、FOUP3を保持した状態のグリップ42cが、移載位置CV21又はCV22(即ち、図4で示される)に係るコンベア部分31の直上に移動される。すると、移動されたグリップ42cにより、FOUP3が解放され、移載位置CV21又はCV22に係るコンベア部分31に移載される。これにより、一連の移載動作が終了される。尚、第1コンベア30からビークル2への移載時には、上述した手順と逆の手順で、ポートP1又はP2を介して、第1コンベア30からビークル2へFOUP3が移載される。
【0092】
このように、ポートP1又はP2を介して、ビークル2と第1コンベア30(実際には、移載機構40)との間で、FOUP3が移載されるので、2つの経路(即ち、レール1及び第2経路R2)で多数のFOUP3を効率良く搬送すると共に、2つの経路間で迅速に移載することができる。また、レール1の鉛直下方にポートP1又はP2が設けられているので、ビークル2に横移載を行うための機構を備える必要がなく、ビークル2が該機構の重量分軽量化されるので、その搬送速度を増速することができる。従って、比較的簡単な構成により、効率良くFOUP3を搬送することができる。
(搬送手段及び第3経路間の移載動作)
【0093】
次に、本実施形態に係る搬送システムにおける、搬送手段及び第3経路間の移載動作について、図2から図4を参照して説明する。
【0094】
図2において、第1コンベア30から第2コンベア50への移載時には、先ず第1コンベア30により、FOUP3が、第1コンベア30における移載位置CV21又はCV22(即ち、図4で示される)まで搬送される。すると、水平移動部41及び上下移動部42により、解放状態にあるグリップ42cが、移載位置CV21又はCV22に係るコンベア部分31上のFOUP3の直上に移動され、FOUP3を保持する。続けて、FOUP3を保持した状態のグリップ42cが、移載位置CV31又はCV32における載置面11の直上に移動される。これと相前後して、昇降機構12により、載置面11を有するポートP1又はP2が、最も高い上下位置に移動される。続いて、移動されたグリップ42cにより、FOUP3が解放され、載置面11に移載される。
【0095】
この後、図3において、コントローラ201により、第2コンベア50における移載位置CV31又はCV32(即ち、図4で示される)に、FOUP3が無いことが検出される。すると、昇降機構12により、FOUP3を載置した状態の載置面11が、貫通口C1を介してコンベア部分51の下方に移動され、FOUP3が、載置面11からコンベア部分51へ移載される。この後、第2コンベア50により、FOUP3が搬送方向D3へ搬送される。すると、移載位置CV31又はCV32を通過するFOUP3を避けて、昇降機構12により、載置面11が、貫通口C1を介してコンベア部分51の上方に移動される。これにより、一連の移載動作が終了される。尚、第2コンベア50から第1コンベア30への移載時には、上述した手順と逆の手順で、ポートP1又はP2を介して、第2コンベア50から第1コンベア30へFOUP3が移載される。
【0096】
このように、ポートP1又はP2を介して、第1コンベア30(実際には、移載機構40)と第2コンベア50との間でFOUP3が移載されるので、上下に位置する2つの経路(即ち、第2経路R2及び第3経路R3)で多数のFOUP3を効率良く搬送すると共に、2つの経路間で迅速に移載することができる。また、第2コンベア50において、載置面11の通過を許容する貫通口C1を設けるという比較的簡単な構成により、より迅速にFOUP3を移載することができる。
【0097】
尚、本実施形態では、ポートP1又はP2を介して、ポートP1又はP2に対応する移載位置が設定されている、ビークル2、第1コンベア30(実際には、移載機構40)、及び第2コンベア50の相互間でFOUP3を移載することができる。
【0098】
加えて、本実施形態では、第1コンベア30及び第2コンベア50間で、単に1つのFOUP3を移載するが、移載の過程で、移載される又は移載されたFOUP3に、ポートP1又はP2の軌道G3又はG4に隣接する、例えばストッカ10や処理装置等の装置における処理を施してもよい。
(第3経路からの入庫動作、及び搬送車への出庫動作)
【0099】
次に、本実施形態に係る搬送システムにおける、第3経路から保管庫間への入庫動作、及び保管庫から搬送車への出庫動作ついて、図2から図4、及び図6を参照して説明する。尚、以下説明において、初期設定として、ポートP1が入庫専用のポートとして機能し、ポートP2が出庫専用のポートとして機能するように設定されている。
【0100】
第2コンベア50からストッカ10への入庫時には、先ずコントローラ201により、第2コンベア50における移載位置CV31(即ち、図4に示される)より上流側に、ストッカ10に入庫すべきFOUP3があることが検出される。すると、移載位置CV31を通過するFOUP3を避けて、昇降機構12により、ポートP1における載置面11が、貫通口C1を介してコンベア部分51の下方に移動される。この後、第2コンベア50により、入庫すべきFOUP3が、移載位置CV31まで搬送される。すると、昇降機構12により、載置面11が、貫通口C1を介してコンベア部分51の上方に移動され、入庫すべきFOUP3が、コンベア部分51から載置面11へ移載される。続いて、入庫すべきFOUP3を載置した状態の載置面11が、ストッカ10おける移載位置に移動される。この後、回転載置部21oが、最上段F1におけるエリアIN1(即ち、図6に示される)にない場合に、ストッカ内昇降機構25により、回転載置部21oが、エリアIN1に移動される。すると、スライド機構16により、載置面11上の入庫すべきFOUP3が、開口H1を介して本体部10a内へ水平移動され、回転載置部21oに移載される。
【0101】
続いて、ストッカ内昇降機構25により、最上段F1にある回転載置部21oが、入庫されたFOUP3を収容すべき段F2に対応する位置に上下移動される。この後、保管庫内搬送部20により、回転載置部21oにおけるローラ23が回動され、回転載置部21o上のFOUP3が、回転載置部21oから第1載置部21aへ水平移動される。すると、第1載置部21a上のFOUP3が、所望の載置部21へ移動(即ち、保管庫内搬送)される。これにより、一連の入庫動作が終了される。
【0102】
ストッカ10からビークル2への出庫時には、先ず保管庫内搬送部20により、所望の載置部21上の出庫すべきFOUP3が、第1載置部21dに移動(即ち、保管庫内搬送)される。続いて、出庫すべきFOUP3が載置されている段F2に対応する位置に、回転載置部21pがない場合に、保管庫内搬送に並行又は相前後して、ストッカ内昇降機構25により、回転載置部21pが段F2に対応する位置に上下移動される。すると、保管庫内搬送部20により、第1載置部21dにおけるローラ23が回転され、第1載置部21d上のFOUP3が、段F2に対応する位置にある回転載置部21pへ水平移動される。すると、ストッカ内昇降機構25により、段F2にある回転載置部21pが最上段F1におけるエリアIN2(即ち、図6に示される)に移動される。すると、ストッカ10おける移載位置に、ポートP2における載置部11がない場合に、昇降機構12により、載置部11が、ストッカ10における移載位置に移動される。この後、保管庫内搬送部20により、回転載置部21pにおけるローラ23が回転され、回転載置部21p上のFOUP3が、開口H2を介して本体部10a外へ水平移動され、載置面11に移載される。すると、昇降機構12により、載置面11を有するポートP1又はP2が、最も高い上下位置に移動される。
【0103】
続いて、該最も高い上下位置への移動に並行又は相前後して、第1コンベア30により、空荷の状態にあるビークル2が、第1コンベア30における移載位置CV22(即ち、図4に示される)で停止される。すると、ホイスト機構5により、解放状態にあるグリップ7が、載置面11上のFOUP3の直上に移動される。すると、移動されたグリップ7により、FOUP3が保持(即ち、移載)される。これにより、一連の出庫動作が終了される。
【0104】
このように、第2コンベア50とビークル2との間でFOUP3が移載される過程で、ストッカ10に対する入出庫が行われるが、スライド機構16により、ポートP1又はP2と、ストッカ10との間でFOUP3が迅速に移載されるので、入出庫を伴う場合であっても、効率良くFOUP3を搬送することができる。
【0105】
また、スライド機構16を備えるポートP1又はP2と、ストッカ内昇降機構25により複数段F1〜F4間で上下移動される載置部21o又は21pとの間で、FOUP3が水平移動されるので、ポートP1及びP2を、入庫直後及び出庫直前に空荷の状態とすることができる。また、各段F1〜F4において保管庫内搬送を独立して行うので、複数のFOUP3を短時間で保管庫内搬送することができる。これにより、ポートP1又はP2における1つのFOUP3に要する入庫時間及び出庫時間が短縮されると共に、保管庫内搬送時間が最短されるので、入出庫を伴う場合であっても、更に効率良くFOUP3を搬送することができる。
【0106】
尚、ストッカ10の代わりに、処理装置を備えてもよい。この場合に、第1コンベア30及び第2コンベア50間の移載の過程に、FOUP3に対して、処理装置による所定種類の処理が施される。
【0107】
加えて、本実施形態では、第1コンベア30及び第2コンベア50は、複数のコンベア部分31又は51から構成されるが、複数のコンベア部分31又は51の代わりに、複数のローラを備えてもよい。
【0108】
更に、本実施形態では、ポート及びストッカ10間で移載するための手段として、スライド機構16を備えるが、スライド機構16の代わりに、ポートP1又はP2と、回転載置部21o又は21pとの間を移動するロボットハンド等を備えてもよい。
【0109】
本発明は、上述した実施形態に限られるものではなく、請求の範囲及び明細書全体から読み取れる発明の要旨或いは思想に反しない範囲で適宜変更可能であり、そのような変更を伴う搬送システムもまた本発明の技術的範囲に含まれるものである。
【図面の簡単な説明】
【0110】
【図1】実施形態に係る搬送システムの外観を示す斜視図である。
【図2】図1の搬送システムを側面側から視た側面図である。
【図3】図2の第2移載手段による横移載を示す側面図である。
【図4】図1の搬送システムを上面側から視た上面図である。
【図5】図1のストッカの正面を図式的に示す正面図である。
【図6】図1の複数の載置部の配列を示す断面図である。
【図7】図6の複数の載置部の回転後の状態を示す断面図である。
【符号の説明】
【0111】
1…レール、2…ビークル(天井走行車)、3…FOUP(荷)、10…ストッカ、12…昇降機構、16…スライド機構、30…第1コンベア、40…移載機構、50…第2コンベア、100…搬送システム
【技術分野】
【0001】
本発明は、例えば半導体素子製造用の各種基板を収容するFOUP(Front Opening Unified Pod)等の荷を、ビークル等の搬送手段により搬送する搬送システムの技術分野に関する。
【背景技術】
【0002】
この種の搬送システムとして、例えばコンベアと、ロードポートを有するFOUPアドバンスプレートアセンブリとを備えており、FOUPアドバンスプレートアセンブリによりロードポートを昇降させることで、コンベアとの間でFOUPを移載可能である搬送システムがある(特許文献1参照)。
【0003】
【特許文献1】国際公開WO2006/091593号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した特許文献1によれば、FOUPの搬送がコンベアだけで行われる場合であって、ロードポートの昇降距離が比較的長い場合に、コンベアとの間で、1つのFOUPの移載が迅速に行われても、多数のFOUPの移載では、荷の数に比例してその昇降時間が増大してしまい、搬送効率が低下するという技術的課題がある。
【0005】
本発明は、例えば上述した問題点に鑑みなされたものであり、簡単な構成により効率良くFOUP等の荷を搬送することを可能ならしめる搬送システムを提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明の第1搬送システムは上記課題を解決するために、第1経路と、該第1経路に沿って一の荷を搬送すると共に該搬送される一の荷を移載可能な第1移載手段を有する搬送車と、少なくとも一箇所において、前記第1経路の側方における前記第1経路よりも下方を通る第2経路と、該第2経路上で前記一の荷と同一又は異なる他の荷を搬送する搬送手段と、前記一箇所における前記第2経路よりも下方に配置されたポートと、少なくとも前記一箇所において前記搬送される他の荷を横移載方式で前記ポートとの間で移載可能な第2移載手段とを備え、前記第1移載手段は、前記一の荷を縦移載又は横移載方式で前記ポートとの間で移載可能である。
【0007】
本発明の第1搬送システムによれば、第1又は第2移載手段により、搬送車又は搬送手段と、ポートとの間で荷を移載可能である。ここで「ポート」は、例えばFOUP等の荷を移載する場合に、荷が少なくとも一時的に載置される一時載置用棚等のバッファである。このようなポートは、例えば、ストッカ等の入出庫の際に載置可能なように、ストッカ等の入出庫口の付近に設けられる入出庫ポートであってもよい。搬送車は、例えば天井走行型のビークルであり、例えば天井に敷設されたレール等の第1経路に沿って走行する。搬送車は、例えば本体部と、第1移載手段とを有する。ここで「第1移載手段」は、例えばFOUP等の一の荷を保持するグリップ機構と、該グリップ機構を昇降させるホイスト機構とを備える。本体部は、一の荷を、グリップ機構及びホイスト機構ごと収容すると共に、第1経路に沿って走行するための走行機能を備える。第1移載手段は、例えばポートに対応する移載位置において、一の荷を、縦移載方式でポートとの間で移載可能である。ここで「縦移載方式」は、一の荷を、例えば移載位置に停止した搬送車の鉛直下方にあるポートに移載するための方式であって、ホイスト機構のみで移載可能である。或いは、第1移載手段は、例えば本体部からホイスト機構及びグリップ機構を横方向にせり出させるスライダ機構を更に備えており、例えば移載位置において、一の荷を、横移載方式でポートとの間で移載可能である。ここで「横移載方式」は、一の荷を、例えば移載位置に停止した搬送車の側方における、該搬送車よりも下方にあるポートに移載するための方式であって、ホイスト機構及びスライダ機構により移載可能である。
【0008】
搬送車及びポート間の移載について、一の荷が搬送車からポートへ移載される場合に、例えば、先ず搬送車により、一の荷が移載位置まで搬送される。次に、搬送車におけるホイスト機構又は/及びスライダ機構により、グリップ機構に保持されている一の荷が、ポートへ移載可能な位置(即ち、ポートの直上)に移動される。この後、一の荷がグリップ機構から解放され、ポートに載置(即ち、移載)される。
【0009】
また、一の荷がポートから搬送車へ移載される場合に、例えば、先ず搬送車が移載位置まで移動されると共に、ホイスト機構又は/及びスライダ機構により、グリップ機構が、該ポート上の一の荷を保持可能な位置に移動される。次に、該一の荷がグリップ機構に保持され、搬送車に移載される。
【0010】
第1搬送システムに係る搬送手段は、例えばローラコンベア、ベルトコンベア等のコンベア機構であり、第2経路上で、例えばFOUP等の他の荷を搬送する。ここで「他の荷」は、一の荷と同一又は異なる荷である。第2移載手段は、例えば第1移載手段と同様に、グリップ機構と、ホイスト機構と、スライダ機構とを有し、例えばポートに対応する移載位置において、搬送手段により搬送される他の荷を、横移載方式でポートとの間で移載可能である。ここで「横移載方式」は、他の荷を、例えば移載位置における第2経路よりも下方にあるポートに移載するための方式であって、ホイスト機構及びスライダ機構により移載可能である。第2移載手段は、例えば移載位置に設けられている。
【0011】
搬送手段及びポート間の移載について、他の荷が搬送手段からポートへ移載される場合に、例えば、先ず搬送手段により、他の荷が、移載位置まで搬送される。次に、第2移載手段におけるホイスト機構又は/及びスライダ機構により、グリップ機構が、該第2経路上の他の荷を保持可能である位置に移動される。次に、グリップ機構により、該他の荷が保持される。次に、グリップ機構に保持されている他の荷が、ポートへ移載可能な位置(即ち、ポートの直上)に移動される。この後、他の荷がグリップ機構から解放され、ポートに載置(即ち、移載)される。
【0012】
また、他の荷がポートから搬送手段へ移載される場合に、例えば、先ず第2移載手段におけるホイスト機構又は/及びスライダ機構により、グリップ機構が、該ポート上の他の荷を保持可能な位置に移動される。次に、グリップ機構により、該他の荷が保持される。次に、ホイスト機構又は/及びスライダ機構により、グリップ機構に保持されている他の荷が、搬送手段へ移載可能な位置(即ち、移載位置に当たる第2経路の直上)に移動される。この後、他の荷がグリップ機構から解放され、該第2経路に載置(即ち、移載)される。
【0013】
尚、第1搬送システムは、例えば上述した搬送車及びポート間、若しくは搬送手段及びポート間で、荷の移載を行うだけでなく、ポートを介して、搬送車及び搬送手段間で移載を行うことも可能である。
【0014】
第1及び第2経路、並びにポートの構成について、第2経路は、少なくとも一箇所において、第1経路の側方における、該第1経路よりも下方を通る。ポートは、該一箇所における第2経路よりも下方であって、具体的には、例えば該一箇所における第1経路の鉛直下方に配置される。ここで「一箇所」は、例えば上述した「移載位置」である。このように第1及び第2経路、並びにポートを構成することで、2つの経路(即ち、第1及び第2経路)で、多数の荷を搬送すると共に、可動ポートを介して、搬送車及び搬送手段間で、荷を移載することができる。
【0015】
尚、ポートが、例えば移載位置に停止した搬送車の鉛直下方に配置される場合に、縦移載方式で移載可能であるため、搬送車は、スライダ機構を備えない。このため、オーバーヘッドホイスト等のスライダ機構を装備する場合と比較して、搬送速度を増速することができる。
【0016】
以上のように、第1及び第2経路で多数の荷を搬送すると共に、第1及び第2移載手段により、ポートを介して、搬送車及び搬送手段の相互間で、荷の移載を迅速に行うので、比較的簡単な構成により効率良く荷を搬送することができる。
【0017】
本発明の第1搬送システムの一態様では、前記第2移載手段は、前記一箇所における前記第2経路の上方に敷設されている。
【0018】
この態様によれば、例えば移載位置における第2経路に他の荷が載置されると、載置された他の荷が、第2移載手段におけるグリップ機構により迅速に保持されるので、移載時間を短縮することができる。
【0019】
本発明の第1搬送システムの他の態様では、前記第2移載手段は、前記搬送される他の荷を保持可能な保持手段と、該保持手段を、前記第2経路の上方及び前記第1経路の下方の間で水平移動可能な水平移動手段と、前記第1経路の下方に移動された前記保持手段が保持している荷を、昇降可能な昇降手段とを備える。
【0020】
この態様によれば、第2移載手段は、例えば上述したグリップ機構である保持手段と、例えば上述したスライダ機構である水平移動手段と、例えば上述した昇降機構である昇降手段とを備える。これらの機構は、例えば初期設定として、移載時を除いて、移載位置における第2経路の上方に配置されている。
【0021】
ポートが、例えば移載位置における第1経路の下方に配置されており、第2移載手段が、例えば移載位置における第2経路の上方に敷設されている。この場合に、搬送手段からポートへ他の荷を移載するには、例えば昇降手段により、保持手段が、第2経路上の他の荷を保持可能な位置まで下降され、保持手段により、第2経路上の他の荷が保持される。次に、水平移動手段により、保持手段が第2経路の上方から第1経路の下方に移動される。次に、昇降手段により、保持手段が、ポートへ移載可能な位置(即ち、ポートの直上)に移動される。この後、他の荷が保持手段から解放され、ポートに載置(即ち、移載)される。
【0022】
また、ポートから搬送手段へ他の荷を移載するには、例えば昇降手段及び水平移動手段により、保持手段が、第1経路の下方に移動されると共に、ポート上の他の荷を保持可能な位置(即ち、ポートの直上)に移動される。次に、保持手段により、ポート上の他の荷が保持される。次に、昇降手段及び水平移動手段により、保持手段が、移載位置における第2経路の上方に移動されると共に、移載位置における第2経路へ移載可能な位置(即ち、該第2経路の直上)に移動される。この後、他の荷が保持手段から解放され、該第2経路上に載置(即ち、移載)される。
【0023】
以上のように、第2移載手段を構成することで、搬送手段(言い換えれば、第2移載手段)及びポート間で、縦移載方式による移載を行うことができる。
【0024】
本発明の第1搬送システムの他の態様では、前記ポートは、昇降可能なリフターにおける載置面から構成されている。
【0025】
この態様によれば、ポートは、例えば荷を載置するための載置面を備える載置部である。リフターは、例えば該載置部と、レールと、アクチュエータとを有し、アクチュエータの駆動により、鉛直方向と平行に延びるレールに沿って、載置部(即ち、ポート)を上下移動させる。このようなリフターは、例えば、ストッカの側面に沿って設けられたレールに沿って昇降し、該側面に鉛直に配列された複数の入出庫口のうちの一つに対向する位置で又は該側面に一つ設けられた入出庫口に対向する位置で停止可能とされる。
【0026】
リフターの動作について、具体的には、例えば第2移載手段からポートへ他の荷が移載される場合に、例えば、先ずアクチュエータの駆動により、ポートが、レールに沿って最上の配置位置まで移動される。次に、他の荷を保持している保持手段が、昇降手段及び水平移動手段により、最上の配置位置にあるポートへ移載可能な位置(即ち、ポートの直上)に移動される。該移載可能な位置は、昇降手段により移動される距離が最短となるように設定されている。この後、他の荷が保持手段から解放され、ポートに載置(即ち、移載)される。ポートに対応する高さに移動される。
【0027】
また、ポートから第2移載手段へ他の荷が移載される場合に、例えば、先ずアクチュエータの駆動により、他の荷を載置しているポートが、レールに沿って最上の配置位置まで移動される。この後、保持手段が、昇降手段及び水平移動手段により、最上の配置位置にあるポート上の他の荷を保持可能な位置(即ち、ポートの直上)に移動される。次に、保持手段により、ポート上の他の荷が保持され、第2移載手段に移載される。
【0028】
以上のように、移載に伴って、ポートを機能させることで、第2移載手段又は搬送車と、ポートとの間で移載される荷の移動距離が最短となり、移載時間を短縮することができる。
【0029】
この態様では、少なくとも一箇所において前記第2経路の下方を通る第3経路を更に備え、該第3経路には、前記リフターが下降する際に前記リフターが下方へ通過するのを許容する口又は切れ込みが設けられており、前記リフターが通過するのに伴って前記リフターに載置された前記一の荷又は他の荷を受ける支持部を含んでもよい。
【0030】
このように構成すれば、リフターは、例えば口又は切れ込みを介して、支持部をその上方から下方へ通過することで、支持部との間で荷(即ち、一の荷又は他の荷)を移載する。該移載動作について、具体的には、例えば荷を載置しているリフター(実際には、載置部(即ち、ポート))が、口又は切れ込みを通過して、支持部の下方へ移動される。これに伴って、リフターに載置された荷が、リフターに代わって支持部に支持される。このように、リフターを下方へ移動させるといった比較的簡単な構成により、DLT(Direct Load Transport)方式で、ポートから第3経路へ効率良く荷を移載することができる。また、上述した第3経路へ荷を移載する動作の逆の動作により、DLT方式で、第3経路からリフターへ(更にはポート等へ)荷を効率良く移載することも可能である。
【0031】
前記第3経路に前記支持部を含んでいる態様では、前記リフター及び前記支持部は、前記一の荷又は他の荷が前記支持部に載置された状態において、前記リフターが前記第3経路の下方から上方に向けて前記口又は切込みを通過するのに伴って前記支持部に載置された前記一の荷又は他の荷を前記リフターで受けるように構成されていてもよい。
【0032】
このように構成すれば、リフターは、例えば口又は切れ込みを介して、荷(即ち、一の荷又は他の荷)を載置した状態にある支持部をその下方から上方へ通過することで、支持部から荷を移載する。該移載動作について、具体的には、例えば支持部の下方にあるリフターが、口又は切れ込みを通過して、支持部の上方へ移動される。これに伴って、支持部に載置されている荷が、支持部に代わってリフターに支持される。このように、リフターを上下移動させるといった比較的簡単な構成により、第3経路との間の移載を行うことで、更に効率良く荷をDLT方式で移載することができる。
【0033】
前記ポートがリフターにおける載置面から構成されている態様では、前記リフターが昇降する軌道に隣接して配置されており、前記一又は他の荷を保管するストッカ及び前記一又は他の荷に対して所定種類の処理を施す処理装置のうち少なくとも一方の装置を更に備え、前記少なくとも一方の装置及び前記リフターは、前記リフターが前記少なくとも一方の装置に対する出入用の位置に停止した際に、前記少なくとも一方の装置と前記リフターとの間で、前記一又は他の荷を移載可能に構成されていてもよい。
【0034】
このように構成すれば、ストッカ及び処理装置のうち少なくとも一方の装置は、例えば出入用の位置に隣接して、リフターとの間で荷を移載するための移載面が設定されている。少なくとも一方の装置又はリフターは、例えば外内移動手段を備える。外内移動手段は、例えば少なくとも一方の装置とリフターとの間で、荷(即ち、一の荷又は他の荷)を移載可能である。外内移動手段は、例えばリフターにおける載置面を回動させる回動機構、スライドさせるスライド機構、又は該載置面と少なくとも一方の装置における移載面との間で移載可能なロボットアーム等を備える。
【0035】
少なくとも一方の装置がストッカであって、リフターからストッカへ荷が移載される場合に、例えば、先ず荷を載置しているリフター(実際には、載置面)が、出入用の位置まで上下移動される。次に、例えば回動機構である外内移動手段により、載置面が回動され、載置面上の荷が、ストッカにおける移載面に移動(即ち、移載)される。
【0036】
また、ストッカからリフターへ荷が移載される場合に、例えば、先ず空荷の状態にあるリフター(実際には、載置面)が、出入用の位置まで上下移動される。次に、ストッカにおける移載面に載置されている荷が、例えばロボットアームである外内移動手段により、リフターに移載される。
【0037】
以上のように、例えば外内移動手段により、少なくとも一方の装置とリフターとの間で、効率良く迅速に荷を移載することができる。
【0038】
本発明の第2搬送システムは上記課題を解決するために、荷をその底側から支持可能な第1支持部を有し、昇降可能な可動ポートと、(i)該可動ポートの上方を通過する第1経路に沿って一の荷を搬送すると共に該搬送される一の荷を縦移載又は横移載方式で前記可動ポートとの間で移載可能な第1搬送系、並びに(ii)少なくとも一箇所において、前記第1経路の側方における前記第1経路よりも下方を通る第2経路上で前記一の荷と同一又は異なる他の荷を搬送すると共に少なくとも前記一箇所において前記搬送される他の荷を横移載方式で前記可動ポートとの間で移載可能な第2搬送系のうち少なくとも一方と、少なくとも一箇所において前記第1又は第2経路の下方を通る第3経路とを備え、該第3経路には、前記可動ポートが下降する際に前記第1支持部が下方へ通過するのを許容する口又は切れ込みが設けられており、前記第1支持部が通過するのに伴って前記第1支持部に載置された前記一の荷又は他の荷を受ける第2支持部を含む。
【0039】
本発明の第2搬送システムによれば、例えば第1搬送系又は第2搬送系又は第3経路と、可動ポートとの間で荷を移載可能である。ここで「可動ポート」は、例えばFOUP等の荷を移載する場合に、荷が少なくとも一時的に載置される一時載置用棚等のバッファである。可動ポートは、例えば第1支持部と、レールと、アクチュエータとを有するリフターであり、アクチュエータの駆動により、鉛直方向と平行に延びるレールに沿って、第1支持部を上下移動させる。このような可動ポートは、例えば、ストッカ等の入出庫の際に載置可能なようにストッカ等の入出庫口の付近に設けられる入出庫ポートであってもよい。この場合、可動ポートであるリフターは、例えば、ストッカの側面に沿って設けられたレールに沿って昇降し、該側面に鉛直に配列された複数の入出庫口のうちの一つに対向する位置で又は該側面に一つ設けられた入出庫口に対向する位置で停止可能とされる。
【0040】
第1搬送系は、例えばOHT(Overhead Hoist Transport)(即ち、天井走行型の搬送車)であり、例えば天井に敷設されたレール等の第1経路に沿って走行する。この場合に、第1搬送系は、例えば本体部と、第1移載手段とを有する。ここで「第1移載手段」は、例えばFOUP等の一の荷を保持するグリップ機構と、該グリップ機構を昇降させるホイスト機構とを備える。本体部は、一の荷を、グリップ機構及びホイスト機構ごと収容すると共に、第1経路に沿って走行するための走行機能を備える。第1移載手段は、例えば可動ポートに対応する移載位置において、一の荷を、縦移載方式でポートとの間で移載可能である。ここで「縦移載方式」は、一の荷を、例えばホイスト機構のみで、第1搬送系と、可動ポートとの間で移載可能である。更に、第1移載手段は、例えば本体部からホイスト機構及びグリップ機構を横方向にせり出させるスライダ機構を更に備えており、例えば移載位置において、一の荷を、横移載方式でポートとの間で移載可能である。ここで「横移載方式」は、一の荷を、例えばホイスト機構及びスライダ機構により、第1搬送系と、可動ポートとの間で移載可能である。
【0041】
第2搬送系は、例えば搬送手段と、第2移載手段とを備える。搬送手段は、例えばローラコンベア、ベルトコンベア等のコンベア機構であり、第2経路上で、例えばFOUP等の他の荷を搬送する。ここで「他の荷」は、一の荷と同一又は異なる荷である。第2移載手段は、例えば第1移載手段と同様に、グリップ機構と、ホイスト機構と、スライダ機構とを有し、例えばポートに対応する移載位置において、移載位置に搬送される他の荷を、横移載方式でポートとの間で移載可能である。ここで「横移載方式」は、他の荷を、例えばホイスト機構及びスライダ機構により、第2搬送系と、可動ポートとの間で移載可能である。
【0042】
第3経路は、例えばDLT(Direct Load Transport)を構成する一要素であり、例えば搬送手段を含む。第3経路における搬送手段は、例えばローラコンベア、ベルトコンベア等のコンベア機構であって、第2支持部を含んでおり、第3経路上で、荷(即ち、一の荷又は他の荷)を搬送する。
【0043】
第1及び第2支持部は、例えば荷の底面における相異なる部分(典型的には、中央寄り部分と周辺寄り部分)を支持するように構成されており、どちらか一方で荷を支持することが可能である。
【0044】
可動ポートにおける第1支持部は、口又は切れ込みを介して、第2支持部をその上方から下方へ通過することで、第2支持部との間で荷を移載する。具体的には、例えば荷を載置している第1支持部が、口又は切れ込みを通過して、第2支持部の下方へ移動される。これに伴って、第1支持部に載置された荷が、第1支持部に代わって、第2支持部に支持される。このように、例えばリフターを下方へ移動させるといった比較的簡単な構成により、DLT方式で、可動ポートから第3経路へ効率良く移載することができる。また、上述した第3経路へ荷を移載する動作の逆の動作により、DLT方式で、第3経路から可動ポートへ荷を効率良く移載することも可能である。
【0045】
第1から第3経路、並びに可動ポートの構成について、第1経路は、可動ポートの上方であって、具体的には、例えば可動ポートの鉛直上方を通過する。第2経路は、少なくとも一箇所において、第1経路の側方における、該第1経路よりも下方を通る。第3経路は、少なくとも一箇所において、第1及び第2経路の下方であって、具体的には、例えば第1経路が通過する可動ポートの鉛直下方に配置される。ここで「一箇所」は、例えば上述した「移載位置」である。このように第1から第3経路、並びに可動ポートを構成することで、3つの経路(即ち、第1から第3経路)で、多数の荷を搬送すると共に、可動ポートを介して、第1搬送系、第2搬送系、及び第3経路の相互間で、荷を移載することができる。
【0046】
尚、第1経路が、例えば可動ポートの鉛直上方に配置される場合に、縦移載方式で移載可能であるため、搬送車は、スライダ機構を備えない。このため、オーバーヘッドホイスト等のスライダ機構を装備する場合と比較して、搬送速度を増速することができる。
【0047】
第1から第3経路、並びに可動ポートは、例えば上述したように構成される。この場合に、可動ポートを介して、第1経路から第3経路へ荷を移載するには、例えば、先ず可動ポートにおける第1支持部が、例えばレールに沿って最上の配置位置まで移動される。次に、第1搬送系における第1移載手段により、第1経路に沿って搬送される荷が保持され、縦移載方式で、最上の配置位置にある第1支持部に移載される。次に、第1経路からの荷を載置した状態にある第1支持部が、第3経路における口又は切れ込みを介して、第2支持部の下方へ移動されると、第1支持部上の荷が、第1支持部に代わって第2支持部に支持(即ち、移載)される。
【0048】
また、可動ポートを介して、第3経路から第2経路へ荷を移載するには、例えば、先ず可動ポートにおける第1支持部が、第3経路における第2支持部の下方へ移動される。次に、第3経路における搬送手段により、該第2支持部まで、荷が搬送される。次に、第1支持部が、口又は切れ込みを介して、第2支持部の上方へ移動されると、第2支持部に載置されている荷が、第2支持部に代わって第1支持部に支持(即ち、移載)される。次に、第1支持部が、レールに沿って最上の配置位置まで移動される。次に、第2搬送系における第2移載手段により、第1支持部上の荷が保持され、横移載方式で、第2搬送系における搬送手段に移載される。
【0049】
以上のように、第1から第3経路で多数の荷を搬送すると共に、第1移載手段、第2移載手段、及び口及び切れ込みを介する移載により、可動ポートを介して、第1搬送系、第2搬送系、及び第3経路の相互間で、荷の移載を迅速に行うので、比較的簡単な構成により効率良く荷を搬送することができる。
【0050】
本発明の第2搬送システムの一態様では、前記第1支持部及び前記第2支持部は、前記一の荷又は他の荷が前記第2支持部に載置された状態において、前記第1支持部が前記第3経路の下方から上方に向けて前記口又は切込みを通過するのに伴って前記第2支持部に載置された前記一の荷又は他の荷を前記第1支持部で受けるように構成されている。
【0051】
この態様によれば、第1支持部が、口又は切れ込みを介して、荷(即ち、一の荷又は他の荷)を載置した状態にある第2支持部をその下方から上方へ通過することで、第2支持部から荷を移載する。該移載動作について、具体的には、例えば第2支持部の下方にある第1支持部が、口又は切れ込みを通過して、第2支持部の上方へ移動される。これに伴って、第2支持部に載置されている荷が、第2支持部に代わって第1支持部に支持される。このように、第1支持部を上下移動させるといった比較的簡単な構成により、第3経路との間の移載を行うことで、更に効率良く荷をDLT方式で移載することができる。
【0052】
本発明の第2搬送システムの他の態様では、前記可動ポートが昇降する軌道に隣接して配置されており、前記一又は他の荷を保管するストッカ及び前記一又は他の荷に対して所定種類の処理を施す処理装置のうち少なくとも一方の装置を更に備え、前記少なくとも一方の装置及び前記可動ポートは、前記可動ポートが前記少なくとも一方の装置に対する出入用の位置に停止した際に、前記少なくとも一方の装置と前記可動ポートとの間で、前記一又は他の荷を移載可能に構成されている。
【0053】
このように構成すれば、ストッカ及び処理装置のうち少なくとも一方の装置は、例えば出入用の位置に隣接して、可動ポートとの間で荷(即ち、一の荷又は他の荷)を移載するための移載面が設定されている。少なくとも一方の装置又は可動ポートは、例えば外内移動手段を備える。外内移動手段は、例えば少なくとも一方の装置と可動ポートとの間で、荷を移載可能である。外内移動手段は、例えば可動ポートにおける載置面を回動させる回動機構、スライドさせるスライド機構、又は該載置面と少なくとも一方の装置における移載面との間で移載可能なロボットアーム等を備える。
【0054】
少なくとも一方の装置がストッカであって、可動ポートからストッカへ荷が移載される場合に、例えば、先ず荷を載置している可動ポート(実際には、載置面)が、出入用の位置まで上下移動される。次に、例えば回動機構である外内移動手段により、載置面が回動され、載置面上の荷が、ストッカにおける移載面に移動(即ち、移載)される。
【0055】
また、ストッカから可動ポートへ荷が移載される場合に、例えば、先ず空荷の状態にある可動ポート(実際には、載置面)が、出入用の位置まで上下移動される。次に、ストッカにおける移載面に載置されている荷が、例えばロボットアームである外内移動手段により、可動ポートに移載される。
【0056】
以上のように、例えば外内移動手段により、少なくとも一方の装置と可動ポートとの間で、効率良く迅速に荷を移載することができる。
【0057】
尚、本発明の第2搬送システムにおいても、上述した本発明の第1搬送システムにおける各種態様と同様の各種態様を採ることが可能である。
【0058】
本発明の作用及び他の利得は次に説明する実施するための最良の形態から明らかにされる。
【発明を実施するための最良の形態】
【0059】
以下、本発明の実施形態について図を参照しつつ説明する。
【0060】
実施形態に係る搬送システムの構成について図1から図7を参照して説明する。
【0061】
先ず、実施形態に係る搬送システムの概要について図1を参照して説明する。ここに図1は、実施形態に係る搬送システムの外観を示す。
【0062】
図1において、搬送システム100は、レール1、ビークル2、第1コンベア30、移載機構40、第2コンベア50、ポートP1及びP2、ストッカ10、並びにコントローラ201を備える。コントローラ201は、制御手段の一例としてプロセッサ、メモリ等を含んで構成され且つ搬送システム100の各部と接続されている。コントローラ201は、半導体素子製造工程に基づいて、FOUP3の搬送及び移載を、後に詳述するように管理又は制御する。
【0063】
FOUP3は、本発明に係る「一の荷」及び「他の荷」の一例として搬送の対象とされ、内部に、不図示の各種基板を複数収納可能である。FOUP3は、上面に、ビークル2又は移載機構40により保持されるフランジ3aを有し、底面に、ポートP1又はP2上の位置決めピン11aに係合される不図示の凹部を有する。FOUP3は、ビークル2、第1コンベア30、及び第2コンベア50により、ストッカ10や図示しない製造装置、OHTバッファ、大型ストッカ等に搬送される。
【0064】
レール1は、本発明に係る「第1経路」の一例として、ビークル2が走行するための軌道の役割を果たす。ビークル2は、本発明に係る「搬送車」の一例として、例えばリニアモータにより駆動されるOHTであり、FOUP3を、例えば搬送方向D1へ搬送する。ビークル2は、ホイスト機構5を有する。
【0065】
図2は、図1の搬送システムを側方(即ち、図1における右側方)から視た側面を図式的に示す。図2において、ホイスト機構5は、本発明に係る「第1移載手段」の一例として、本体部5a、ベルト6、グリップ7、及び不図示のモータを備える。ベルト6において、一端が本体部5aの図示しない巻き軸に固着されており、他端がグリップ7に固定されている。グリップ7は、フランジ3aを把持可能に、両端部が内側に向けて屈曲されている。グリップ7は、フランジ3aを把持する把持状態と、フランジ3aを解放する解放状態との間で変位可能である。本体部5aは、ベルト6の繰り出し又は巻き上げ動作により、グリップ7を上下移動させることで、FOUP3を上下移動させる。ビークル2は、ホイスト機構5によりFOUP3を上下移動させる縦移載方式で、ポートP1又はP2との間で、FOUP3を移載する。尚、ビークル2は、グリップ7のポートP1又はP2に対する位置(例えば、水平二方向及び回転方向についての位置)を微調整する調整機構を更に備えていてもよい。
【0066】
図1において、第1コンベア30は、本発明に係る「搬送手段」の一例として、複数のコンベア部分31、不図示の一対の支持壁、及びアクチュエータを備える。複数のコンベア部分31は、一対の支持壁の内側に、第2経路R2(図1において一点鎖線で示される)に沿って、且つ第2経路R2の両側に対を成すように取り付けられている。複数のコンベア部分31の各々は、例えばキャタピラー(登録商標)式コンベアであり、FOUP3の底面における端部(即ち、第2経路R2の延伸方向に対する左又は右端部)を支持する。第2経路R2の両側に位置する一対のコンベア部分31の各々は、FOUP3を1つ載置可能に夫々構成されている。第1コンベア30は、アクチュエータの駆動により、FOUP3が載置されている一対のコンベア部分31を同時に回動させることで、FOUP3を、例えば搬送方向D2へ搬送する。
【0067】
第2経路R2は、第1コンベア30により搬送されるFOUP3の経路である。図2において、第2経路R2(即ち、図2において一点鎖線の円で示される)は、レール1の側方(即ち、図2において、レール1の左側方)であって、レール1に沿って走行するビークル2よりも下方に延びている。
【0068】
図2において、移載機構40は、本発明に係る「第2移載手段」の一例として、本体部40a、水平移動部41、及び上下移動部42を備えており、FOUP3を水平及び上下方向に移動させる横移載方式で、ポートP1又はP2との間で、FOUP3を移載する。
【0069】
図4は、図1の搬送システムの上面を図式的に示す。図4において、本体部40aは、ポートP1又はP2に対応する移載位置CV21又はCV22(即ち、図4において、一点鎖線で示されるエリア)における第2経路R2の上方に設けられている。本体部40aには、水平移動部41が水平移動可能に取り付けられている。水平移動部41には、上下移動部42が水平移動可能に取り付けられている。
【0070】
図3は、図2の搬送システムの側面を、搬送車による横移載の動作状態と共に模式的に示す。図3において、水平移動部41は、本発明に係る「水平移動手段」の一例として、本体部41a、レール41b、及び図示しないアクチュエータを備える。本体部41aの底面には、図示しない凹部が形成されており、該凹部にレール41bが嵌合されている。レール41bは、第2経路R2の上方と、本体部41aの側方(即ち、図3における右側方)との間で移動する。レール41bの下部には、上下移動部42の上部が嵌合されている。水平移動部41は、アクチュエータを駆動して、レール41bに沿って、上下移動部42を、レール41bが移動可能な位置より更に側方へ移動させる。このように、水平移動部41は、レール41bを介して、上下移動部42を、第2経路R2の上方と、レール1の下方との間で段階的に水平移動させる。
【0071】
上下移動部42は、本発明に係る「昇降手段」の一例として、ホイスト42a、ベルト42b、及びグリップ42cを備える。ホイスト42aは、本発明に係る「保持手段」の一例として、図示しないモータを備え、モータの駆動により、ベルト42bを繰り出す又は巻き上げる動作を行う。ベルト42bについて、一端がホイスト42aにおける図示しない巻き軸に固着されており、他端がグリップ42cに固定されている。グリップ42cは、FOUP3上面のフランジ3aを把持可能に、両端部が内側に向けて屈曲されている。グリップ42cは、フランジ3aを把持する把持状態と、フランジ3aを解放する解放状態との間で変位可能である。ホイスト42aは、ベルト42bの繰り出し又は巻き上げ動作により、グリップ42cを上下移動させる。尚、上下移動部42は、グリップ42cのポートP1又はP2に対する位置(例えば、水平二方向及び回転方向についての位置)を微調整する調整機構を更に備えていてもよい。
【0072】
本実施形態では、搬送システム100は、2つのポートP1及びP2を備えている。図1において、ポートP1が、ビークル2の搬送方向D1、第1コンベア30の搬送方向D2、及び第2コンベア50の搬送方向D3の上流側に配置され、ポートP2が、その下流側に配置されている。各ポートP1及びP2は、本発明に係る「リフター」及び「可動ポート」の一例として、ビークル2、第1コンベア30(実際には、移載機構40)、第2コンベア50、及びストッカ10の相互間で、FOUP3を移載するためのポートである。各ポートP1及びP2は、FOUP3を載置するための載置面11を備える。載置面11は、本発明に係る「第1支持部」の一例として、FOUP3の中央部をその底側から支持する。載置面11の上面には、位置決めピン11aが取り付けられている。位置決めピン11aは、移載されるFOUP3の凹部に係合される。
【0073】
図1において、各ポートP1又はP2は、本実施形態では、昇降機構12及びスライド機構16を備える。昇降機構12は、ストッカ10における2つの開口H1及びH2に対応して、2つ設けられている。昇降機構12は、各ポートP1及びP2に対して、一対のレール13、支持部14、及び不図示のアクチュエータを備える。一対のレール13は、ストッカ10の外壁(即ち、図1における正面)において、各開口H1及びH2の両側に、その長手方向が上下方向に取り付けられている。支持部14は、各ポートP1及びP2における載置面11を支持する。支持部14の一端部は、一対のレール13に嵌合されている。昇降機構12は、アクチュエータを駆動して、支持部14を一対のレール13に沿って上下移動させることで、各ポートP1及びP2を、後述の第1載置部21a又は21dに対向する位置に独立して移動させる。ストッカ10との間でFOUP3を移載する場合に、昇降機構12は、ポートP1又はP2を、開口H1又はH2に対応する移載位置に停止させる。移載位置は、本発明に係る「出入用の位置」の一例であり、ポートP1又はP2と、ストッカ10との間でFOUP3を移載可能な位置である。
【0074】
図4において、スライド機構16は、外内移動手段の一例として、2つのポートP1及びP2に対応して、2つ設けられている。スライド機構16は、各ポートP1及びP2に対して、不図示の一対のローラ、輪状の回動帯、及びアクチュエータを備える。輪状の回動帯は、一対のローラを取り巻くように、一対のローラに取り付けられている。輪状の回動帯の一部は、各ポートP1及びP2における載置面11として機能する。昇降機構12により、ポートP1又はP2が、ストッカ10における移載位置(即ち、図5において、点線で示される上下位置)に停止されると、スライド機構16は、アクチュエータを駆動して、一対のローラを回転させることで、輪状の回動帯を回動させる。この回動により、ポートP1又はP2上のFOUP3が、後述する開口H1又はH2を介して、ストッカ10における第1載置部21a又は21dに水平移動される。又は、第1載置部21a又は21d上のFOUP3が、ポートP1又はP2における載置部11上の位置決めピン11aに係合されるように、水平移動される。このように、スライド機構16は、ポートP1又はP2と、ストッカ10との間でFOUP3を移載する。
【0075】
第2コンベア50は、複数のコンベア部分51、不図示の一対の支持壁、及びアクチュエータを備える。複数のコンベア部分51は、一対の支持壁の内側に、第3経路R3(即ち、図1において一点鎖線で示される)に沿って、且つ第3経路R3の両側に対を成すように取り付けられている。複数のコンベア部分31の各々は、例えばキャタピラー(登録商標)式コンベアであり、本発明に係る「支持部」及び「第2支持部」の一例として、FOUP3の底面における端部(即ち、第3経路R3の延伸方向に対する左又は右端部)を支持する。第3経路R3の両側に位置する一対のコンベア部分51の各々は、FOUP3を1つ載置可能に夫々構成されている。第2コンベア50は、アクチュエータの駆動により、FOUP3が載置されている一対のコンベア部分51を同時に回動させることで、FOUP3を、例えば搬送方向D3へ搬送する。
【0076】
第3経路R3は、第2コンベア50により搬送されるFOUP3の経路である。図2において、第3経路R3(即ち、図2において一点鎖線の円で示される)は、レール1及び第2経路R2の下方に、詳細には、レール1の鉛直下方に延びている。
【0077】
図4において、複数のコンベア部分51は、本実施形態では、第3経路R3に沿った長さが異なる、第1コンベア部分51a、及び第2コンベア部分51bから構成される。第2コンベア50において、ポートP1に対応する移載位置CV31(即ち、図4において一点鎖線で示されるエリア)には、1つの第1コンベア部分51aと、2つの第2コンベア部分51bとが係っている。2つの第2コンベア部分51bは、その間に貫通口C1(即ち、図4において、エリアCV31内に一点鎖線で示されるエリア)を隔てて、不図示の支持壁に取り付けられている。貫通口C1は、本発明に係る「口又は切れ込み」の一例として、ポートP1(実際には、支持部14)が第2コンベア部分51bを貫通するための開口である。昇降機構12は、この貫通口C1を介して、ポートP1を、移載位置CV31におけるコンベア部分51(即ち、第1コンベア部分51a及び2つの第2コンベア部分51b)の上方及び下方間で移動させる。尚、第2コンベア50について、ポートP1に対応する移載位置CV31と同様に、ポートP2に対応する移載位置CV32が設定されており、移載位置CV32には、1つの第1コンベア部分51aと、2つの第2コンベア部分51bとが係っている。
【0078】
第2コンベア50及びポート(即ち、ポートP1又はP2)間におけるFOUP3の移載について、図2から図4を参照して説明する。図2において、第2コンベア50からポートP1又はP2へFOUP3を移載する場合に、昇降機構12は、載置面11を、コンベア部分51の下方から上方へ移動させる。この際、載置面11が、第1コンベア部分51a及び第2コンベア部分51b間に入り込み、昇降機構12における支持部14が、2つの第2コンベア部分51b間に入り込む。続いて、載置面11が更に上方へ移動され、第1コンベア部分51a及び2つの第2コンベア部分51bに支持されていないFOUP3の中央部が、載置面11に支持されることで、FOUP3がコンベア部分51(即ち、第2コンベア50)から載置面11(即ち、ポートP1又はP2)に移載される。
【0079】
ポートP1又はP2から第2コンベア50へFOUP3を移載する場合に、昇降機構12は、FOUP3を支持している載置面11を、コンベア部分51の上方から下方まで移動させる。この際、FOUP3の中央部を支持している載置面11が、第1コンベア部分51a及び第2コンベア部分51b間に入り込み、昇降機構12における支持部14が、2つの第2コンベア部分51b間に入り込む。続いて、載置面11が更に下方へ移動され、載置面11に支持されていないFOUP3の両端部が、第1コンベア部分51a及び2つの第2コンベア部分51bに支持されることで、FOUP3が載置面11(即ち、ポートP1又はP2)からコンベア部分51(即ち、第2コンベア50)に移載される。
【0080】
図5は、図1のストッカの正面を図式的に示す。図5において、ストッカ10は、本体部10a、及び保管庫内搬送部20を備えており、ポートP1及びP2が昇降する軌道G3及びG4に隣接して配置されている。
【0081】
本体部10aは、4つの段F1〜F4に鉛直方向に均等に分断されている。4つの段F1〜F4のうち最上段F1における一側面(即ち、図1における前面)には、所定の水平距離を隔てて2つの開口H1及びH2が設けられている。各開口H1及びH2は、FOUP3を本体部10aの外内に出し入れ可能なサイズに形成されている。図4において、2つの開口H1及びH2は、レール1、第2経路R2、及び第3経路R3に沿って並んでいる。ストッカ10における移載位置は、開口H1又はH2と、載置面11に載置されたFOUP3とが対向するように、ポートP1又はP2が配置される上下位置である。
【0082】
図1において、保管庫内搬送部20は、本体部10a内に、複数の載置部21、及びストッカ内昇降機構25を備える。保管庫内搬送部20は、複数の載置部21を総括的に制御して、各段F1〜F4において、複数のFOUP3を独立して搬送(即ち、保管庫内搬送)すると共に、ストッカ内昇降機構25を上下移動させることで、複数段F1〜F4間で、複数のFOUP3を相互に移動させる。
【0083】
図6は、複数の載置部の配列を示し、図7は、図6の複数の載置部の回転後の状態を示す。図6及び図7は、具体的には、図5におけるA1−A1断面に相当しており、ストッカ10の最上段F1に配列される複数の載置部21を示している。図6において、本体部10aの内部におけるエリアIN1又はIN2は、開口H1又はH2に隣接している。また、空間S1又はS2(即ち、図5に一点鎖線で示される)は、エリアIN1又はIN2を含む鉛直に延びる空間である。本体部10aの外部において、開口H1又はH2に隣接するエリアには、ポートP1又はP2が配置されている。
【0084】
保管庫内搬送部20の構成について、図6及び図7を参照して詳しく説明する。図6において、保管庫内搬送部20は、複数の載置部21により、複数の載置部21間でFOUP3を水平移動させることで、各階F1〜F4において独立して保管庫内搬送を行う。複数の載置部21は、各階F1〜F4において、空間S1及びS2を除くエリアC1(即ち、図6及び図7において太線で示される)に、水平二方向(即ち、図6における左右方向及び上下方向)に広がるように6つ配列されている。各載置部21は、回転載置部21a〜21fであって、これら6つの回転載置部21a〜21fのうち、空間S1又はS2に隣接する2つの回転載置部は、第1載置部21a及び21dとして夫々設定されている。
【0085】
複数の載置部21は、本実施形態では、各段F1〜F4における6つの載置部21の他に、空間S1及びS2の各々に、1つずつ配置されている。空間S1及びS2に配置されている2つの載置部21は、複数段F1〜F4に共通の回転載置部21o及び21pであり、ストッカ内昇降機構25により、空間S1又はS2内で上下移動される。
【0086】
ストッカ内昇降機構25は、空間S1及びS2に夫々設けられている。ストッカ内昇降機構25は、空間S1又はS2に対して、例えば、不図示の一対のレール、支持部26と、不図示のアクチュエータとを備える。一対のレールは、空間S1又はS2内に、その長手方向が上下方向に取り付けられている。支持部26は、空間S1又はS2における回転載置部21o又は21pを支持する。支持部26の端部は、一対のレールに嵌合されている。ストッカ内昇降機構25は、アクチュエータを駆動して、支持部26を一対のレールに沿って上下移動させることで、回転載置部21o又は21pを、各段F1〜F4における第1載置部21a又は21dに対向する位置(以下、単に「各段F1〜F4に対応する位置」と言う)に独立して移動させる。ストッカ内昇降機構25により、各段F1〜F4に対応する位置に移動された回転載置部21o又は21pは、各段F1〜F4における第1載置部21a又は21dとの間で、FOUP3を独立して水平移動させる。また、最上段F1に対応する位置(即ち、エリアIN1又はIN2)に移動された回転載置部21o又は21pは、ポートP1又はP2との間で、開口H1又はH2を介してFOUP3を独立して水平移動させる。
【0087】
図6に示すように、2つの回転載置部21o及び21pが、エリアIN1又はIN2にある場合に、8つの載置部21(即ち、載置部21a〜21f,21o及び21p)は、相互間でFOUP3を水平移動させる。8つの載置部21の各々は、ローラ23と、不図示のアクチュエータとを有する。ローラ23は、アクチュエータにより回転される。各ローラ23の上面は、FOUP3が収容又は載置される載置面として機能する。FOUP3の水平移動について、具体的には、FOUP3が載置部21bに収容又は載置されている場合に、載置部21bにおけるローラ23が右回転されると、FOUP3が載置部21bの右隣りの載置部21cへ水平移動される。また、この場合に、載置部21bにおけるローラ23が左回転されると、FOUP3が載置部21bの左隣りの載置部21eへ水平移動される。尚、各載置部21は、ローラ23の回転によるローラコンベア式移動を行うが、その他に、ベルト等の回動によるベルトコンベア式移動を行ってもよい。
【0088】
8つの載置部21、即ち、8つの回転載置部21a〜21f,21o及び21pの各々は更に、ターンテーブル24と、不図示のアクチュエータとを有し、FOUP3の移動方向及びその姿勢を90度回転させる。ターンテーブル24は、ローラ23の下方に配置されており、不図示の軸受けを介して、ローラ23を固定している。ターンテーブル24は、アクチュエータにより水平面内で90度回転され、ローラ23を水平面内で90度回転させる。具体的には、図6の状態にある8つの回転載置部21a〜21f,21o及び21pにおいて、ターンテーブル24が90度右回転されると、図7に示すように、ローラ23が一体となって90度右回転される。この回転により、回転載置部21a〜21f,21o及び21pに収容又は載置されているFOUP3の移動方向及びその姿勢が90度右回転される。また、ターンテーブル24が90度左回転されると、ローラ23が一体となって90度左回転される。この回転により、回転載置部21a〜21f,21o及び21pに収容又は載置されているFOUP3の移動方向及びその姿勢が90度左回転される。
(搬送車及び搬送手段間の移載動作)
【0089】
次に、本実施形態に係る搬送システムにおける、搬送車及び搬送手段間の移載動作について、図2から図4を参照して説明する。
【0090】
図2において、ビークル2から第1コンベア30への移載時には、先ず第1コンベア30により、FOUP3を保持した状態にあるビークル2が、レール1における移載位置CV31又はCV32(即ち、図4で示される)で停止される。すると、昇降機構12により、ポートP1又はP2が、最も高い上下位置に移動される。この後、ホイスト機構5により、FOUP3を保持した状態にあるグリップ7が、ポートP1又はP2における載置面11の直上に移動される。すると、移動されたグリップ7により、FOUP3が解放され、載置面11に移載される。この際、載置面11上面の位置決めピン11aがFOUP3の凹部に係合される。
【0091】
この後、図3において、水平移動部41及び上下移動部42により、解放状態にあるグリップ42cが、載置面11上のFOUP3の直上に移動される。すると、移動されたグリップ42cにより、FOUP3が保持される。続けて、水平移動部41及び上下移動部42により、FOUP3を保持した状態のグリップ42cが、移載位置CV21又はCV22(即ち、図4で示される)に係るコンベア部分31の直上に移動される。すると、移動されたグリップ42cにより、FOUP3が解放され、移載位置CV21又はCV22に係るコンベア部分31に移載される。これにより、一連の移載動作が終了される。尚、第1コンベア30からビークル2への移載時には、上述した手順と逆の手順で、ポートP1又はP2を介して、第1コンベア30からビークル2へFOUP3が移載される。
【0092】
このように、ポートP1又はP2を介して、ビークル2と第1コンベア30(実際には、移載機構40)との間で、FOUP3が移載されるので、2つの経路(即ち、レール1及び第2経路R2)で多数のFOUP3を効率良く搬送すると共に、2つの経路間で迅速に移載することができる。また、レール1の鉛直下方にポートP1又はP2が設けられているので、ビークル2に横移載を行うための機構を備える必要がなく、ビークル2が該機構の重量分軽量化されるので、その搬送速度を増速することができる。従って、比較的簡単な構成により、効率良くFOUP3を搬送することができる。
(搬送手段及び第3経路間の移載動作)
【0093】
次に、本実施形態に係る搬送システムにおける、搬送手段及び第3経路間の移載動作について、図2から図4を参照して説明する。
【0094】
図2において、第1コンベア30から第2コンベア50への移載時には、先ず第1コンベア30により、FOUP3が、第1コンベア30における移載位置CV21又はCV22(即ち、図4で示される)まで搬送される。すると、水平移動部41及び上下移動部42により、解放状態にあるグリップ42cが、移載位置CV21又はCV22に係るコンベア部分31上のFOUP3の直上に移動され、FOUP3を保持する。続けて、FOUP3を保持した状態のグリップ42cが、移載位置CV31又はCV32における載置面11の直上に移動される。これと相前後して、昇降機構12により、載置面11を有するポートP1又はP2が、最も高い上下位置に移動される。続いて、移動されたグリップ42cにより、FOUP3が解放され、載置面11に移載される。
【0095】
この後、図3において、コントローラ201により、第2コンベア50における移載位置CV31又はCV32(即ち、図4で示される)に、FOUP3が無いことが検出される。すると、昇降機構12により、FOUP3を載置した状態の載置面11が、貫通口C1を介してコンベア部分51の下方に移動され、FOUP3が、載置面11からコンベア部分51へ移載される。この後、第2コンベア50により、FOUP3が搬送方向D3へ搬送される。すると、移載位置CV31又はCV32を通過するFOUP3を避けて、昇降機構12により、載置面11が、貫通口C1を介してコンベア部分51の上方に移動される。これにより、一連の移載動作が終了される。尚、第2コンベア50から第1コンベア30への移載時には、上述した手順と逆の手順で、ポートP1又はP2を介して、第2コンベア50から第1コンベア30へFOUP3が移載される。
【0096】
このように、ポートP1又はP2を介して、第1コンベア30(実際には、移載機構40)と第2コンベア50との間でFOUP3が移載されるので、上下に位置する2つの経路(即ち、第2経路R2及び第3経路R3)で多数のFOUP3を効率良く搬送すると共に、2つの経路間で迅速に移載することができる。また、第2コンベア50において、載置面11の通過を許容する貫通口C1を設けるという比較的簡単な構成により、より迅速にFOUP3を移載することができる。
【0097】
尚、本実施形態では、ポートP1又はP2を介して、ポートP1又はP2に対応する移載位置が設定されている、ビークル2、第1コンベア30(実際には、移載機構40)、及び第2コンベア50の相互間でFOUP3を移載することができる。
【0098】
加えて、本実施形態では、第1コンベア30及び第2コンベア50間で、単に1つのFOUP3を移載するが、移載の過程で、移載される又は移載されたFOUP3に、ポートP1又はP2の軌道G3又はG4に隣接する、例えばストッカ10や処理装置等の装置における処理を施してもよい。
(第3経路からの入庫動作、及び搬送車への出庫動作)
【0099】
次に、本実施形態に係る搬送システムにおける、第3経路から保管庫間への入庫動作、及び保管庫から搬送車への出庫動作ついて、図2から図4、及び図6を参照して説明する。尚、以下説明において、初期設定として、ポートP1が入庫専用のポートとして機能し、ポートP2が出庫専用のポートとして機能するように設定されている。
【0100】
第2コンベア50からストッカ10への入庫時には、先ずコントローラ201により、第2コンベア50における移載位置CV31(即ち、図4に示される)より上流側に、ストッカ10に入庫すべきFOUP3があることが検出される。すると、移載位置CV31を通過するFOUP3を避けて、昇降機構12により、ポートP1における載置面11が、貫通口C1を介してコンベア部分51の下方に移動される。この後、第2コンベア50により、入庫すべきFOUP3が、移載位置CV31まで搬送される。すると、昇降機構12により、載置面11が、貫通口C1を介してコンベア部分51の上方に移動され、入庫すべきFOUP3が、コンベア部分51から載置面11へ移載される。続いて、入庫すべきFOUP3を載置した状態の載置面11が、ストッカ10おける移載位置に移動される。この後、回転載置部21oが、最上段F1におけるエリアIN1(即ち、図6に示される)にない場合に、ストッカ内昇降機構25により、回転載置部21oが、エリアIN1に移動される。すると、スライド機構16により、載置面11上の入庫すべきFOUP3が、開口H1を介して本体部10a内へ水平移動され、回転載置部21oに移載される。
【0101】
続いて、ストッカ内昇降機構25により、最上段F1にある回転載置部21oが、入庫されたFOUP3を収容すべき段F2に対応する位置に上下移動される。この後、保管庫内搬送部20により、回転載置部21oにおけるローラ23が回動され、回転載置部21o上のFOUP3が、回転載置部21oから第1載置部21aへ水平移動される。すると、第1載置部21a上のFOUP3が、所望の載置部21へ移動(即ち、保管庫内搬送)される。これにより、一連の入庫動作が終了される。
【0102】
ストッカ10からビークル2への出庫時には、先ず保管庫内搬送部20により、所望の載置部21上の出庫すべきFOUP3が、第1載置部21dに移動(即ち、保管庫内搬送)される。続いて、出庫すべきFOUP3が載置されている段F2に対応する位置に、回転載置部21pがない場合に、保管庫内搬送に並行又は相前後して、ストッカ内昇降機構25により、回転載置部21pが段F2に対応する位置に上下移動される。すると、保管庫内搬送部20により、第1載置部21dにおけるローラ23が回転され、第1載置部21d上のFOUP3が、段F2に対応する位置にある回転載置部21pへ水平移動される。すると、ストッカ内昇降機構25により、段F2にある回転載置部21pが最上段F1におけるエリアIN2(即ち、図6に示される)に移動される。すると、ストッカ10おける移載位置に、ポートP2における載置部11がない場合に、昇降機構12により、載置部11が、ストッカ10における移載位置に移動される。この後、保管庫内搬送部20により、回転載置部21pにおけるローラ23が回転され、回転載置部21p上のFOUP3が、開口H2を介して本体部10a外へ水平移動され、載置面11に移載される。すると、昇降機構12により、載置面11を有するポートP1又はP2が、最も高い上下位置に移動される。
【0103】
続いて、該最も高い上下位置への移動に並行又は相前後して、第1コンベア30により、空荷の状態にあるビークル2が、第1コンベア30における移載位置CV22(即ち、図4に示される)で停止される。すると、ホイスト機構5により、解放状態にあるグリップ7が、載置面11上のFOUP3の直上に移動される。すると、移動されたグリップ7により、FOUP3が保持(即ち、移載)される。これにより、一連の出庫動作が終了される。
【0104】
このように、第2コンベア50とビークル2との間でFOUP3が移載される過程で、ストッカ10に対する入出庫が行われるが、スライド機構16により、ポートP1又はP2と、ストッカ10との間でFOUP3が迅速に移載されるので、入出庫を伴う場合であっても、効率良くFOUP3を搬送することができる。
【0105】
また、スライド機構16を備えるポートP1又はP2と、ストッカ内昇降機構25により複数段F1〜F4間で上下移動される載置部21o又は21pとの間で、FOUP3が水平移動されるので、ポートP1及びP2を、入庫直後及び出庫直前に空荷の状態とすることができる。また、各段F1〜F4において保管庫内搬送を独立して行うので、複数のFOUP3を短時間で保管庫内搬送することができる。これにより、ポートP1又はP2における1つのFOUP3に要する入庫時間及び出庫時間が短縮されると共に、保管庫内搬送時間が最短されるので、入出庫を伴う場合であっても、更に効率良くFOUP3を搬送することができる。
【0106】
尚、ストッカ10の代わりに、処理装置を備えてもよい。この場合に、第1コンベア30及び第2コンベア50間の移載の過程に、FOUP3に対して、処理装置による所定種類の処理が施される。
【0107】
加えて、本実施形態では、第1コンベア30及び第2コンベア50は、複数のコンベア部分31又は51から構成されるが、複数のコンベア部分31又は51の代わりに、複数のローラを備えてもよい。
【0108】
更に、本実施形態では、ポート及びストッカ10間で移載するための手段として、スライド機構16を備えるが、スライド機構16の代わりに、ポートP1又はP2と、回転載置部21o又は21pとの間を移動するロボットハンド等を備えてもよい。
【0109】
本発明は、上述した実施形態に限られるものではなく、請求の範囲及び明細書全体から読み取れる発明の要旨或いは思想に反しない範囲で適宜変更可能であり、そのような変更を伴う搬送システムもまた本発明の技術的範囲に含まれるものである。
【図面の簡単な説明】
【0110】
【図1】実施形態に係る搬送システムの外観を示す斜視図である。
【図2】図1の搬送システムを側面側から視た側面図である。
【図3】図2の第2移載手段による横移載を示す側面図である。
【図4】図1の搬送システムを上面側から視た上面図である。
【図5】図1のストッカの正面を図式的に示す正面図である。
【図6】図1の複数の載置部の配列を示す断面図である。
【図7】図6の複数の載置部の回転後の状態を示す断面図である。
【符号の説明】
【0111】
1…レール、2…ビークル(天井走行車)、3…FOUP(荷)、10…ストッカ、12…昇降機構、16…スライド機構、30…第1コンベア、40…移載機構、50…第2コンベア、100…搬送システム
【特許請求の範囲】
【請求項1】
第1経路と、
該第1経路に沿って一の荷を搬送すると共に該搬送される一の荷を移載可能な第1移載手段を有する搬送車と、
少なくとも一箇所において、前記第1経路の側方における前記第1経路よりも下方を通る第2経路と、
該第2経路上で前記一の荷と同一又は異なる他の荷を搬送する搬送手段と、
前記一箇所における前記第2経路よりも下方に配置されたポートと、
少なくとも前記一箇所において前記搬送される他の荷を横移載方式で前記ポートとの間で移載可能な第2移載手段と
を備え、
前記第1移載手段は、前記一の荷を縦移載又は横移載方式で前記ポートとの間で移載可能である
ことを特徴とする搬送システム。
【請求項2】
前記第2移載手段は、前記一箇所における前記第2経路の上方に敷設されていることを特徴とする請求項1に記載の搬送システム。
【請求項3】
前記第2移載手段は、
前記搬送される他の荷を保持可能な保持手段と、
該保持手段を、前記第2経路の上方及び前記第1経路の下方の間で水平移動可能な水平移動手段と、
前記第1経路の下方に移動された前記保持手段が保持している荷を、昇降可能な昇降手段と
を備えることを特徴とする請求項1又は2に記載の搬送システム。
【請求項4】
前記ポートは、昇降可能なリフターにおける載置面から構成されていることを特徴とする請求項1から3のいずれか一項に記載の搬送システム。
【請求項5】
少なくとも一箇所において前記第2経路の下方を通る第3経路を更に備え、
該第3経路には、前記リフターが下降する際に前記リフターが下方へ通過するのを許容する口又は切れ込みが設けられており、前記リフターが通過するのに伴って前記リフターに載置された前記一の荷又は他の荷を受ける支持部を含む
ことを特徴とする請求項4に記載の搬送システム。
【請求項6】
前記リフター及び前記支持部は、前記一の荷又は他の荷が前記支持部に載置された状態において、前記リフターが前記第3経路の下方から上方に向けて前記口又は切込みを通過するのに伴って前記支持部に載置された前記一の荷又は他の荷を前記リフターで受けるように構成されていることを特徴とする請求項5に記載の搬送システム。
【請求項7】
前記リフターが昇降する軌道に隣接して配置されており、前記一又は他の荷を保管するストッカ及び前記一又は他の荷に対して所定種類の処理を施す処理装置のうち少なくとも一方の装置を更に備え、
前記少なくとも一方の装置及び前記リフターは、前記リフターが前記少なくとも一方の装置に対する出入用の位置に停止した際に、前記少なくとも一方の装置と前記リフターとの間で、前記一又は他の荷を移載可能に構成されていることを特徴とする請求項4から6のいずれか一項に記載の搬送システム。
【請求項8】
荷をその底側から支持可能な第1支持部を有し、昇降可能な可動ポートと、
(i)該可動ポートの上方を通過する第1経路に沿って一の荷を搬送すると共に該搬送される一の荷を縦移載又は横移載方式で前記可動ポートとの間で移載可能な第1搬送系、並びに(ii)少なくとも一箇所において、前記第1経路の側方における前記第1経路よりも下方を通る第2経路上で前記一の荷と同一又は異なる他の荷を搬送すると共に少なくとも前記一箇所において前記搬送される他の荷を横移載方式で前記可動ポートとの間で移載可能な第2搬送系のうち少なくとも一方と、
少なくとも一箇所において前記第1又は第2経路の下方を通る第3経路と
を備え、
該第3経路には、前記可動ポートが下降する際に前記第1支持部が下方へ通過するのを許容する口又は切れ込みが設けられており、前記第1支持部が通過するのに伴って前記第1支持部に載置された前記一の荷又は他の荷を受ける第2支持部を含む
ことを特徴とする搬送システム。
【請求項9】
前記第1支持部及び前記第2支持部は、前記一の荷又は他の荷が前記第2支持部に載置された状態において、前記第1支持部が前記第3経路の下方から上方に向けて前記口又は切込みを通過するのに伴って前記第2支持部に載置された前記一の荷又は他の荷を前記第1支持部で受けるように構成されていることを特徴とする請求項8に記載の搬送システム。
【請求項10】
前記可動ポートが昇降する軌道に隣接して配置されており、前記一又は他の荷を保管するストッカ及び前記一又は他の荷に対して所定種類の処理を施す処理装置のうち少なくとも一方の装置を更に備え、
前記少なくとも一方の装置及び前記可動ポートは、前記可動ポートが前記少なくとも一方の装置に対する出入用の位置に停止した際に、前記少なくとも一方の装置と前記可動ポートとの間で、前記一又は他の荷を移載可能に構成されていることを特徴とする請求項8又は9に記載の搬送システム。
【請求項1】
第1経路と、
該第1経路に沿って一の荷を搬送すると共に該搬送される一の荷を移載可能な第1移載手段を有する搬送車と、
少なくとも一箇所において、前記第1経路の側方における前記第1経路よりも下方を通る第2経路と、
該第2経路上で前記一の荷と同一又は異なる他の荷を搬送する搬送手段と、
前記一箇所における前記第2経路よりも下方に配置されたポートと、
少なくとも前記一箇所において前記搬送される他の荷を横移載方式で前記ポートとの間で移載可能な第2移載手段と
を備え、
前記第1移載手段は、前記一の荷を縦移載又は横移載方式で前記ポートとの間で移載可能である
ことを特徴とする搬送システム。
【請求項2】
前記第2移載手段は、前記一箇所における前記第2経路の上方に敷設されていることを特徴とする請求項1に記載の搬送システム。
【請求項3】
前記第2移載手段は、
前記搬送される他の荷を保持可能な保持手段と、
該保持手段を、前記第2経路の上方及び前記第1経路の下方の間で水平移動可能な水平移動手段と、
前記第1経路の下方に移動された前記保持手段が保持している荷を、昇降可能な昇降手段と
を備えることを特徴とする請求項1又は2に記載の搬送システム。
【請求項4】
前記ポートは、昇降可能なリフターにおける載置面から構成されていることを特徴とする請求項1から3のいずれか一項に記載の搬送システム。
【請求項5】
少なくとも一箇所において前記第2経路の下方を通る第3経路を更に備え、
該第3経路には、前記リフターが下降する際に前記リフターが下方へ通過するのを許容する口又は切れ込みが設けられており、前記リフターが通過するのに伴って前記リフターに載置された前記一の荷又は他の荷を受ける支持部を含む
ことを特徴とする請求項4に記載の搬送システム。
【請求項6】
前記リフター及び前記支持部は、前記一の荷又は他の荷が前記支持部に載置された状態において、前記リフターが前記第3経路の下方から上方に向けて前記口又は切込みを通過するのに伴って前記支持部に載置された前記一の荷又は他の荷を前記リフターで受けるように構成されていることを特徴とする請求項5に記載の搬送システム。
【請求項7】
前記リフターが昇降する軌道に隣接して配置されており、前記一又は他の荷を保管するストッカ及び前記一又は他の荷に対して所定種類の処理を施す処理装置のうち少なくとも一方の装置を更に備え、
前記少なくとも一方の装置及び前記リフターは、前記リフターが前記少なくとも一方の装置に対する出入用の位置に停止した際に、前記少なくとも一方の装置と前記リフターとの間で、前記一又は他の荷を移載可能に構成されていることを特徴とする請求項4から6のいずれか一項に記載の搬送システム。
【請求項8】
荷をその底側から支持可能な第1支持部を有し、昇降可能な可動ポートと、
(i)該可動ポートの上方を通過する第1経路に沿って一の荷を搬送すると共に該搬送される一の荷を縦移載又は横移載方式で前記可動ポートとの間で移載可能な第1搬送系、並びに(ii)少なくとも一箇所において、前記第1経路の側方における前記第1経路よりも下方を通る第2経路上で前記一の荷と同一又は異なる他の荷を搬送すると共に少なくとも前記一箇所において前記搬送される他の荷を横移載方式で前記可動ポートとの間で移載可能な第2搬送系のうち少なくとも一方と、
少なくとも一箇所において前記第1又は第2経路の下方を通る第3経路と
を備え、
該第3経路には、前記可動ポートが下降する際に前記第1支持部が下方へ通過するのを許容する口又は切れ込みが設けられており、前記第1支持部が通過するのに伴って前記第1支持部に載置された前記一の荷又は他の荷を受ける第2支持部を含む
ことを特徴とする搬送システム。
【請求項9】
前記第1支持部及び前記第2支持部は、前記一の荷又は他の荷が前記第2支持部に載置された状態において、前記第1支持部が前記第3経路の下方から上方に向けて前記口又は切込みを通過するのに伴って前記第2支持部に載置された前記一の荷又は他の荷を前記第1支持部で受けるように構成されていることを特徴とする請求項8に記載の搬送システム。
【請求項10】
前記可動ポートが昇降する軌道に隣接して配置されており、前記一又は他の荷を保管するストッカ及び前記一又は他の荷に対して所定種類の処理を施す処理装置のうち少なくとも一方の装置を更に備え、
前記少なくとも一方の装置及び前記可動ポートは、前記可動ポートが前記少なくとも一方の装置に対する出入用の位置に停止した際に、前記少なくとも一方の装置と前記可動ポートとの間で、前記一又は他の荷を移載可能に構成されていることを特徴とする請求項8又は9に記載の搬送システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2009−302477(P2009−302477A)
【公開日】平成21年12月24日(2009.12.24)
【国際特許分類】
【出願番号】特願2008−158246(P2008−158246)
【出願日】平成20年6月17日(2008.6.17)
【出願人】(302059274)アシスト テクノロジーズ ジャパン株式会社 (146)
【Fターム(参考)】
【公開日】平成21年12月24日(2009.12.24)
【国際特許分類】
【出願日】平成20年6月17日(2008.6.17)
【出願人】(302059274)アシスト テクノロジーズ ジャパン株式会社 (146)
【Fターム(参考)】
[ Back to top ]