
搬送台車の停止方法
【課題】コンベアステーション上で物品を位置決めする必要がなく、物品搬送のサイクルタイムを短縮することのできる搬送台車の停止方法を提供する。
【解決手段】各コンベアステーションのトラバーサT側端部における搬送経路方向両端近傍に、光学式台車検出手段(S1,S2)を配設し、これら光学式台車検出手段の間に、一対の光学式荷物検出手段(S3,S4)を離間して配置するとともに、トラバーサTが荷物を積載した状態で所定のコンベアステーションに接近した場合、光学式台車検出手段のどちらか一方からのトリガにより、前記一対の光学式荷物検出手段を作動させ、これら一対の光学式荷物検出手段の両方が荷物を検出した時に、前記搬送台車を停止させる。
【解決手段】各コンベアステーションのトラバーサT側端部における搬送経路方向両端近傍に、光学式台車検出手段(S1,S2)を配設し、これら光学式台車検出手段の間に、一対の光学式荷物検出手段(S3,S4)を離間して配置するとともに、トラバーサTが荷物を積載した状態で所定のコンベアステーションに接近した場合、光学式台車検出手段のどちらか一方からのトリガにより、前記一対の光学式荷物検出手段を作動させ、これら一対の光学式荷物検出手段の両方が荷物を検出した時に、前記搬送台車を停止させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、搬送経路に対して直交するように配置されたコンベアステーションから物品(荷物)を受け取り、該搬送経路上を走行して、別のコンベアステーションにこの物品を移送する搬送装置の搬送台車を、所定位置で停止させる方法に関する。
【背景技術】
【0002】
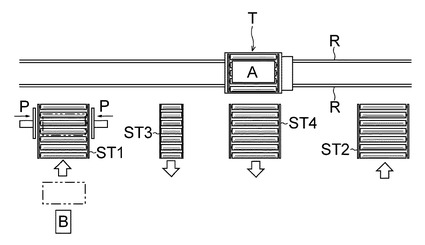
例えば、工場内での物品の移動や、荷物を大量に取り扱う配送(中継)センター内では、トラバーサと呼ばれる無人搬送装置が使用されている(特許文献1等を参照)。図3は、このようなトラバーサの概略構成を示す図である。
【0003】
この搬送装置は、予め定められた走行経路(軌道:トラバーサレールR)上を往復するトラバーサTと、そのレールRの片側あるいは両側に複数設置されたステーション(ST1,ST2,ST3,ST4)とから構成されている。また、トラバーサTと各ステーションST1,ST2,ST3,ST4には、コンベア(本例においてはローラーコンベア)がそれぞれ配設されており、別途設けられた集中制御装置(図示省略)の指令により、コンベア上の物品(荷物)を受け渡しするように構成されている。
【0004】
例えば、ステーションST4に移動させるべき荷物Aが、ステーションST1のコンベア上に置かれた場合、集中制御装置(図示省略)の指令により、トラバーサTがステーションST1の位置に向かって移動を開始する。それと同時に、荷物Aは、ステーションST1のコンベア上を移動し、レールR側端部近傍に到達した時点で、強制装置Pにより、レールR方向の位置決め(センタリング等)がなされる。
【0005】
その後、トラバーサTがステーションST1に正対する所定の位置まで移動したことが確認されると、ステーションおよびトラバーサの各コンベアが駆動され、このトラバーサT上に荷物Aが積み込まれる(特許文献2等を参照)。なお、このような荷物の移動時には、荷物に貼り付けされているバーコードを読み取るかあるいは作業員により入力された荷物のデータ(配送先や大きさ等)が、ステーションST1からトラバーサTに対して、同時に伝達される(特許文献3,4等を参照)。
【0006】
荷物Aが移送されたトラバーサTは、指定のステーション(本例においてはステーションST4)に向かってレールR上を移動し、ステーションST4に正対する所定の位置で停止する。その後、トラバーサTおよびステーションST4の各コンベアが駆動され、荷物AがステーションST4に到達することとなる。
【0007】
【特許文献1】特開平11−24747号公報
【特許文献2】特開2006−62790号公報
【特許文献3】特開2003−76422号公報
【特許文献4】特開平7−93032号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
ところで、以上のような従来の搬送装置における搬送台車の停止位置(コンベアステーション前の停止位置)は、該搬送台車の位置を基準として定められているため、積載される物品(荷物等)を、搭載する前のコンベアステーション上で、強制装置等により位置決め(センタリング等)しておかねば、指定のコンベアステーションに物品を正しく降ろすことができないという問題があった。
【0009】
また、この強制装置等による位置決めをする間、物品(あるいはコンベア)を停止せねばならず、タイムラグが発生してしまうという問題もある。
【0010】
本発明は、上記する課題に対処するためになされたものであり、コンベアステーション上で物品を位置決めする必要がなく、物品搬送のサイクルタイムを短縮することのできる搬送台車の停止方法を提供することを目的としている。
【課題を解決するための手段】
【0011】
前記の目的を達成するために、請求項1に記載の発明は、所定の搬送経路上を走行する搬送台車と、前記搬送経路に対して直交するように配置された複数のコンベアステーションとからなる搬送装置の搬送台車を、所定位置で停止させる方法であって、前記各コンベアステーションの搬送台車側端部における搬送経路方向両端近傍には、光学式台車検出手段がそれぞれ配設され、これら光学式台車検出手段の間には、前記コンベアステーションの幅方向中央線を挟んで対称となる位置に、一対の光学式荷物検出手段が離間して配置されているとともに、前記搬送台車が荷物を積載した状態で所定のコンベアステーションに接近した場合、前記光学式台車検出手段のどちらか一方からの信号により、前記一対の光学式荷物検出手段を作動させ、これら一対の光学式荷物検出手段の両方が荷物を検出した時に、前記搬送台車を停止させることを特徴とする。
【0012】
本発明は、搬送台車に積載された物品の位置検出信号を用いることにより、強制装置等による荷物の位置決め作業を行うことなく、搬送台車を所定位置で停車させるという目的を達成しようとするものである。
【0013】
すなわち、請求項1に記載の発明によれば、光学式台車検出手段のどちらか一方からの信号をトリガとし、コンベアステーションの幅方向中央線を挟んで対称となる位置に離間して配置された一対の光学式荷物検出手段が同時に荷物を検出した時に、搬送台車を停止させることにより、荷物を予めセンタリングすることなく、大きさの異なる荷物を搬送することが可能になる。
【0014】
また、前記荷物の位置が搬送経路方向前後に多少ずれていても、指定のコンベアステーションに正確に降ろすことができるとともに、位置決めのための強制装置等を用いないため、物品搬送のサイクルタイムを短縮することが可能になる。
【0015】
なお、本発明における光学式検出手段とは、レーザー,可視光や不可視光(赤外線)などを光電管等のセンサで感知することにより、物体の存在を感知する検知装置全般を包含する。
【0016】
また、本発明における搬送装置とは、上記のような軌道を有するトラバーサの他に、いわゆる電磁誘導方式や自立誘導方式を用いた、軌道を有さない無人搬送台車を使用する搬送装置も包含する。
【発明の効果】
【0017】
以上のように、本発明の搬送台車の停止方法によれば、搬送台車を用いた物品の搬送効率を向上させることができる。
【発明を実施するための最良の形態】
【0018】
以下、図面を参照しつつこの発明を実施するための形態について説明する。
図1および図2は、本発明の実施形態における搬送装置の概略構成図である。
【0019】
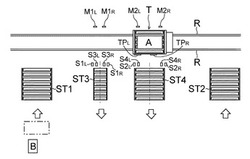
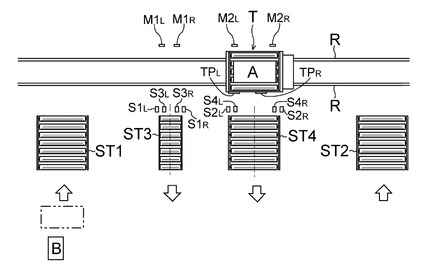
この実施形態における搬送装置も、従来例と同様、定められた走行経路(軌道:トラバーサレールR)上を往復するトラバーサTと、そのレールRの長手方向片側に設置された搬出ステーションST1,ST2および搬入ステーションST3,ST4とからなる。また、トラバーサTと各ステーションST1,ST2,ST3,ST4には、ローラーコンベアがそれぞれ配設されており、別途設けられた集中制御装置(図示省略)の指令により、コンベア上の物品(荷物A,B等)を受け渡しするように構成されている。
【0020】
本実施形態における搬送装置の構造的特徴は、荷物を受け入れるコンベアステーションST3およびST4のトラバーサレールR側端部近傍に、トラバーサTの到達を感知する光学式台車検出手段(回帰反射型センサS1L,S1RおよびS2L,S2R)が配設されている点である。また、これら回帰反射型センサS1L,S1RおよびS2L,S2Rの間には、各コンベアステーションST3およびST4の幅方向中央線を挟んで対称となる位置に、一対の光学式荷物検出手段(回帰反射型センサS3L,S3RおよびS4L,S4R)が配置されている。
【0021】
なお、荷物を検出する一対の回帰反射型センサS3L,S3RおよびS4L,S4Rは、トラバーサTのコンベア面より高い場所に位置しており、ステーションに受け入れる荷物Bおよび荷物Aの幅分だけ離間して配置されている。また、トラバーサTにおける各コンベアステーションに正対する面のレールR長手方向両端近傍には、前記回帰反射型センサS1L,S1RおよびS2L,S2Rの投光を反射する反射テープTPL,TPRがそれぞれ取り付けられており、トラバーサレールRを挟んで、各回帰反射型センサS3L,S3RおよびS4L,S4Rに正対する位置には、これら回帰反射型センサの投光を反射する一対のミラーM1L,M1RおよびM2L,M2Rがそれぞれ配設されている。
【0022】
次に、この搬送装置の動作を説明する。
例えば、ステーションST4に移動させるべき荷物Aが、ステーションST1のコンベア上に置かれた場合(図1)、集中制御装置の指令により、トラバーサTがステーションST1の位置に向かって移動を開始する。それと同時に、荷物Aは、ステーションST1のコンベア上をトラバーサT側端部に向かって移動を開始する。
【0023】
その後、トラバーサTがステーションST1に正対する所定の位置まで移動したことが確認されると、ステーションおよびトラバーサの各コンベアが駆動され、このトラバーサT上に荷物Aが積み込まれる。この時、本実施形態における搬送装置は、荷物の位置決め(センタリング)を行う必要がないため、トラバーサTの静止と同時に荷物Aの移送を開始することができる。
【0024】
なお、従来と同様、荷物の移動時に、荷物に貼り付けされているバーコードを読み取るかあるいは作業員により入力された荷物のデータ(配送先や大きさ等)が、ステーションST1からトラバーサTに対して伝送される。
【0025】
次に、荷物Aを積載したトラバーサTは、前記データに基づき、コンベアステーションST4への移動を開始する。トラバーサTがステーションST4に接近し、ステーションに近接する側の反射テープTRがステーションST4の光学式台車検出手段(回帰反射型センサS2L)に検知されると同時に、このセンサからの信号により、一対の光学式荷物検出手段(回帰反射型センサS4L,S4R)が作動を開始する。そして、荷物Aの幅とほぼ同じ距離離して設置された回帰反射型センサS4LおよびS4Rが、同時に荷物を検知した時に、このトラバーサTが停止することとなる。
【0026】
以上の手順により、本実施形態における搬送装置は、強制装置等による荷物の位置決め作業を行うことなく、トラバーサTを所定位置で停車させることができる。また、位置決め作業を行わないため、物品搬送のサイクルタイムを短縮することが可能になる。
【0027】
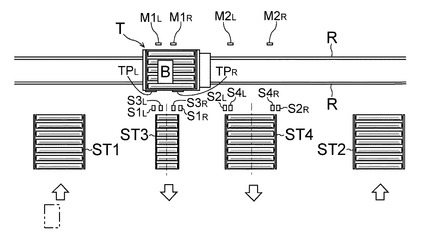
なお、荷物Aより小型の荷物Bを搬送する場合(図2)は、同様に、荷物Bのデータ(配送先や大きさ等)が、ステーションST1からトラバーサTに対して伝送され、その指示に従って、トラバーサTがコンベアステーションST3に向かって移動する。この場合も、ステーションに近接する側の反射テープTRがステーションST3の光学式台車検出手段(回帰反射型センサS1L)に検知されると同時に、このセンサからの信号により、一対の光学式荷物検出手段(回帰反射型センサS3L,S3R)が作動を開始し、これら2つのセンサが、同時に荷物を検知した時にトラバーサTが停止する
【0028】
従って、本実施形態における搬送装置は、荷物を予めセンタリングすることなく、大きさの異なる荷物を搬送することができる。
【0029】
以上の実施形態においては、レール上を走行するトラバーサを例に説明したが、本発明における搬送装置には、軌道を有する搬送装置の他に、いわゆる電磁誘導方式や自立誘導方式を用いた、軌道を有さない無人搬送装置が用いられることもある。
【0030】
また、物品を移動させるコンベアも特に限定されるものではなく、上記ローラーコンベアの他にベルトコンベア等を使用することもできる。また更に、荷物のデータ(配送先や大きさ等)の伝達には、電波を用いた上記方法の他に、光を用いて伝送する方法を使用する場合もある。
【図面の簡単な説明】
【0031】
【図1】本発明の実施形態における搬送装置の動作を示す概略構成図である。
【図2】本発明の実施形態における搬送装置で別の荷物を搬送する場合の動作を示す概略構成図である。
【図3】従来の搬送装置の構成を示す概略構成図である。
【符号の説明】
【0032】
T トラバーサ
ST1,ST2,ST3,ST4 コンベアステーション
P 強制(センタリング)装置
S1,S2,S3,S4 回帰反射型センサ
M1,M2 ミラー
TP 反射テープ
【技術分野】
【0001】
本発明は、搬送経路に対して直交するように配置されたコンベアステーションから物品(荷物)を受け取り、該搬送経路上を走行して、別のコンベアステーションにこの物品を移送する搬送装置の搬送台車を、所定位置で停止させる方法に関する。
【背景技術】
【0002】
例えば、工場内での物品の移動や、荷物を大量に取り扱う配送(中継)センター内では、トラバーサと呼ばれる無人搬送装置が使用されている(特許文献1等を参照)。図3は、このようなトラバーサの概略構成を示す図である。
【0003】
この搬送装置は、予め定められた走行経路(軌道:トラバーサレールR)上を往復するトラバーサTと、そのレールRの片側あるいは両側に複数設置されたステーション(ST1,ST2,ST3,ST4)とから構成されている。また、トラバーサTと各ステーションST1,ST2,ST3,ST4には、コンベア(本例においてはローラーコンベア)がそれぞれ配設されており、別途設けられた集中制御装置(図示省略)の指令により、コンベア上の物品(荷物)を受け渡しするように構成されている。
【0004】
例えば、ステーションST4に移動させるべき荷物Aが、ステーションST1のコンベア上に置かれた場合、集中制御装置(図示省略)の指令により、トラバーサTがステーションST1の位置に向かって移動を開始する。それと同時に、荷物Aは、ステーションST1のコンベア上を移動し、レールR側端部近傍に到達した時点で、強制装置Pにより、レールR方向の位置決め(センタリング等)がなされる。
【0005】
その後、トラバーサTがステーションST1に正対する所定の位置まで移動したことが確認されると、ステーションおよびトラバーサの各コンベアが駆動され、このトラバーサT上に荷物Aが積み込まれる(特許文献2等を参照)。なお、このような荷物の移動時には、荷物に貼り付けされているバーコードを読み取るかあるいは作業員により入力された荷物のデータ(配送先や大きさ等)が、ステーションST1からトラバーサTに対して、同時に伝達される(特許文献3,4等を参照)。
【0006】
荷物Aが移送されたトラバーサTは、指定のステーション(本例においてはステーションST4)に向かってレールR上を移動し、ステーションST4に正対する所定の位置で停止する。その後、トラバーサTおよびステーションST4の各コンベアが駆動され、荷物AがステーションST4に到達することとなる。
【0007】
【特許文献1】特開平11−24747号公報
【特許文献2】特開2006−62790号公報
【特許文献3】特開2003−76422号公報
【特許文献4】特開平7−93032号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
ところで、以上のような従来の搬送装置における搬送台車の停止位置(コンベアステーション前の停止位置)は、該搬送台車の位置を基準として定められているため、積載される物品(荷物等)を、搭載する前のコンベアステーション上で、強制装置等により位置決め(センタリング等)しておかねば、指定のコンベアステーションに物品を正しく降ろすことができないという問題があった。
【0009】
また、この強制装置等による位置決めをする間、物品(あるいはコンベア)を停止せねばならず、タイムラグが発生してしまうという問題もある。
【0010】
本発明は、上記する課題に対処するためになされたものであり、コンベアステーション上で物品を位置決めする必要がなく、物品搬送のサイクルタイムを短縮することのできる搬送台車の停止方法を提供することを目的としている。
【課題を解決するための手段】
【0011】
前記の目的を達成するために、請求項1に記載の発明は、所定の搬送経路上を走行する搬送台車と、前記搬送経路に対して直交するように配置された複数のコンベアステーションとからなる搬送装置の搬送台車を、所定位置で停止させる方法であって、前記各コンベアステーションの搬送台車側端部における搬送経路方向両端近傍には、光学式台車検出手段がそれぞれ配設され、これら光学式台車検出手段の間には、前記コンベアステーションの幅方向中央線を挟んで対称となる位置に、一対の光学式荷物検出手段が離間して配置されているとともに、前記搬送台車が荷物を積載した状態で所定のコンベアステーションに接近した場合、前記光学式台車検出手段のどちらか一方からの信号により、前記一対の光学式荷物検出手段を作動させ、これら一対の光学式荷物検出手段の両方が荷物を検出した時に、前記搬送台車を停止させることを特徴とする。
【0012】
本発明は、搬送台車に積載された物品の位置検出信号を用いることにより、強制装置等による荷物の位置決め作業を行うことなく、搬送台車を所定位置で停車させるという目的を達成しようとするものである。
【0013】
すなわち、請求項1に記載の発明によれば、光学式台車検出手段のどちらか一方からの信号をトリガとし、コンベアステーションの幅方向中央線を挟んで対称となる位置に離間して配置された一対の光学式荷物検出手段が同時に荷物を検出した時に、搬送台車を停止させることにより、荷物を予めセンタリングすることなく、大きさの異なる荷物を搬送することが可能になる。
【0014】
また、前記荷物の位置が搬送経路方向前後に多少ずれていても、指定のコンベアステーションに正確に降ろすことができるとともに、位置決めのための強制装置等を用いないため、物品搬送のサイクルタイムを短縮することが可能になる。
【0015】
なお、本発明における光学式検出手段とは、レーザー,可視光や不可視光(赤外線)などを光電管等のセンサで感知することにより、物体の存在を感知する検知装置全般を包含する。
【0016】
また、本発明における搬送装置とは、上記のような軌道を有するトラバーサの他に、いわゆる電磁誘導方式や自立誘導方式を用いた、軌道を有さない無人搬送台車を使用する搬送装置も包含する。
【発明の効果】
【0017】
以上のように、本発明の搬送台車の停止方法によれば、搬送台車を用いた物品の搬送効率を向上させることができる。
【発明を実施するための最良の形態】
【0018】
以下、図面を参照しつつこの発明を実施するための形態について説明する。
図1および図2は、本発明の実施形態における搬送装置の概略構成図である。
【0019】
この実施形態における搬送装置も、従来例と同様、定められた走行経路(軌道:トラバーサレールR)上を往復するトラバーサTと、そのレールRの長手方向片側に設置された搬出ステーションST1,ST2および搬入ステーションST3,ST4とからなる。また、トラバーサTと各ステーションST1,ST2,ST3,ST4には、ローラーコンベアがそれぞれ配設されており、別途設けられた集中制御装置(図示省略)の指令により、コンベア上の物品(荷物A,B等)を受け渡しするように構成されている。
【0020】
本実施形態における搬送装置の構造的特徴は、荷物を受け入れるコンベアステーションST3およびST4のトラバーサレールR側端部近傍に、トラバーサTの到達を感知する光学式台車検出手段(回帰反射型センサS1L,S1RおよびS2L,S2R)が配設されている点である。また、これら回帰反射型センサS1L,S1RおよびS2L,S2Rの間には、各コンベアステーションST3およびST4の幅方向中央線を挟んで対称となる位置に、一対の光学式荷物検出手段(回帰反射型センサS3L,S3RおよびS4L,S4R)が配置されている。
【0021】
なお、荷物を検出する一対の回帰反射型センサS3L,S3RおよびS4L,S4Rは、トラバーサTのコンベア面より高い場所に位置しており、ステーションに受け入れる荷物Bおよび荷物Aの幅分だけ離間して配置されている。また、トラバーサTにおける各コンベアステーションに正対する面のレールR長手方向両端近傍には、前記回帰反射型センサS1L,S1RおよびS2L,S2Rの投光を反射する反射テープTPL,TPRがそれぞれ取り付けられており、トラバーサレールRを挟んで、各回帰反射型センサS3L,S3RおよびS4L,S4Rに正対する位置には、これら回帰反射型センサの投光を反射する一対のミラーM1L,M1RおよびM2L,M2Rがそれぞれ配設されている。
【0022】
次に、この搬送装置の動作を説明する。
例えば、ステーションST4に移動させるべき荷物Aが、ステーションST1のコンベア上に置かれた場合(図1)、集中制御装置の指令により、トラバーサTがステーションST1の位置に向かって移動を開始する。それと同時に、荷物Aは、ステーションST1のコンベア上をトラバーサT側端部に向かって移動を開始する。
【0023】
その後、トラバーサTがステーションST1に正対する所定の位置まで移動したことが確認されると、ステーションおよびトラバーサの各コンベアが駆動され、このトラバーサT上に荷物Aが積み込まれる。この時、本実施形態における搬送装置は、荷物の位置決め(センタリング)を行う必要がないため、トラバーサTの静止と同時に荷物Aの移送を開始することができる。
【0024】
なお、従来と同様、荷物の移動時に、荷物に貼り付けされているバーコードを読み取るかあるいは作業員により入力された荷物のデータ(配送先や大きさ等)が、ステーションST1からトラバーサTに対して伝送される。
【0025】
次に、荷物Aを積載したトラバーサTは、前記データに基づき、コンベアステーションST4への移動を開始する。トラバーサTがステーションST4に接近し、ステーションに近接する側の反射テープTRがステーションST4の光学式台車検出手段(回帰反射型センサS2L)に検知されると同時に、このセンサからの信号により、一対の光学式荷物検出手段(回帰反射型センサS4L,S4R)が作動を開始する。そして、荷物Aの幅とほぼ同じ距離離して設置された回帰反射型センサS4LおよびS4Rが、同時に荷物を検知した時に、このトラバーサTが停止することとなる。
【0026】
以上の手順により、本実施形態における搬送装置は、強制装置等による荷物の位置決め作業を行うことなく、トラバーサTを所定位置で停車させることができる。また、位置決め作業を行わないため、物品搬送のサイクルタイムを短縮することが可能になる。
【0027】
なお、荷物Aより小型の荷物Bを搬送する場合(図2)は、同様に、荷物Bのデータ(配送先や大きさ等)が、ステーションST1からトラバーサTに対して伝送され、その指示に従って、トラバーサTがコンベアステーションST3に向かって移動する。この場合も、ステーションに近接する側の反射テープTRがステーションST3の光学式台車検出手段(回帰反射型センサS1L)に検知されると同時に、このセンサからの信号により、一対の光学式荷物検出手段(回帰反射型センサS3L,S3R)が作動を開始し、これら2つのセンサが、同時に荷物を検知した時にトラバーサTが停止する
【0028】
従って、本実施形態における搬送装置は、荷物を予めセンタリングすることなく、大きさの異なる荷物を搬送することができる。
【0029】
以上の実施形態においては、レール上を走行するトラバーサを例に説明したが、本発明における搬送装置には、軌道を有する搬送装置の他に、いわゆる電磁誘導方式や自立誘導方式を用いた、軌道を有さない無人搬送装置が用いられることもある。
【0030】
また、物品を移動させるコンベアも特に限定されるものではなく、上記ローラーコンベアの他にベルトコンベア等を使用することもできる。また更に、荷物のデータ(配送先や大きさ等)の伝達には、電波を用いた上記方法の他に、光を用いて伝送する方法を使用する場合もある。
【図面の簡単な説明】
【0031】
【図1】本発明の実施形態における搬送装置の動作を示す概略構成図である。
【図2】本発明の実施形態における搬送装置で別の荷物を搬送する場合の動作を示す概略構成図である。
【図3】従来の搬送装置の構成を示す概略構成図である。
【符号の説明】
【0032】
T トラバーサ
ST1,ST2,ST3,ST4 コンベアステーション
P 強制(センタリング)装置
S1,S2,S3,S4 回帰反射型センサ
M1,M2 ミラー
TP 反射テープ
【特許請求の範囲】
【請求項1】
所定の搬送経路上を走行する搬送台車と、前記搬送経路に対して直交するように配置された複数のコンベアステーションとからなる搬送装置の搬送台車を、所定位置で停止させる方法であって、
前記各コンベアステーションの搬送台車側端部における搬送経路方向両端近傍には、光学式台車検出手段がそれぞれ配設され、これら光学式台車検出手段の間には、前記コンベアステーションの幅方向中央線を挟んで対称となる位置に、一対の光学式荷物検出手段が離間して配置されているとともに、
前記搬送台車が荷物を積載した状態で所定のコンベアステーションに接近した場合、前記光学式台車検出手段のどちらか一方からの信号により、前記一対の光学式荷物検出手段を作動させ、これら一対の光学式荷物検出手段の両方が荷物を検出した時に、前記搬送台車を停止させることを特徴とする搬送台車の停止方法。
【請求項1】
所定の搬送経路上を走行する搬送台車と、前記搬送経路に対して直交するように配置された複数のコンベアステーションとからなる搬送装置の搬送台車を、所定位置で停止させる方法であって、
前記各コンベアステーションの搬送台車側端部における搬送経路方向両端近傍には、光学式台車検出手段がそれぞれ配設され、これら光学式台車検出手段の間には、前記コンベアステーションの幅方向中央線を挟んで対称となる位置に、一対の光学式荷物検出手段が離間して配置されているとともに、
前記搬送台車が荷物を積載した状態で所定のコンベアステーションに接近した場合、前記光学式台車検出手段のどちらか一方からの信号により、前記一対の光学式荷物検出手段を作動させ、これら一対の光学式荷物検出手段の両方が荷物を検出した時に、前記搬送台車を停止させることを特徴とする搬送台車の停止方法。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2008−254861(P2008−254861A)
【公開日】平成20年10月23日(2008.10.23)
【国際特許分類】
【出願番号】特願2007−98097(P2007−98097)
【出願日】平成19年4月4日(2007.4.4)
【出願人】(000232807)日本輸送機株式会社 (320)
【Fターム(参考)】
【公開日】平成20年10月23日(2008.10.23)
【国際特許分類】
【出願日】平成19年4月4日(2007.4.4)
【出願人】(000232807)日本輸送機株式会社 (320)
【Fターム(参考)】
[ Back to top ]