
搬送機構及びこれを用いた微小化学分析システム
【課題】微小固体や液滴を搬送することができる搬送機構、及びこの搬送機構を用いた微小化学分析システムを提供することを目的とする。
【解決手段】所定の搬送方向に搬送される被搬送体20と、前記搬送方向に移動するときは被搬送体20と係合し、前記搬送方向と反対方向に移動するときは被搬送体20との係合が解除される搬送体30と、駆動により前記搬送方向及びその反対方向に搬送体30を往復移動させる駆動部40を備える搬送機構10。
【解決手段】所定の搬送方向に搬送される被搬送体20と、前記搬送方向に移動するときは被搬送体20と係合し、前記搬送方向と反対方向に移動するときは被搬送体20との係合が解除される搬送体30と、駆動により前記搬送方向及びその反対方向に搬送体30を往復移動させる駆動部40を備える搬送機構10。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、搬送機構、詳しくはマイクロアクチュエータを用いて微小な被搬送体を搬送する搬送機構、及びこれを用いて試料等が搬送される微小化学分析システムに関するものである。
【背景技術】
【0002】
半導体微細加工技術を用いて機械素子などの製作を行うマイクロマシン技術は様々な分野への応用が進展している。医療や環境測定の分野においては、超小型のポンプ、バルブ、センサなどを集積化した微小化学分析システム(μTAS:Micro Total Analysis System)が最近盛んに研究がなされている。この微小化学分析システムは、化学分析システムの各要素をマイクロマシン技術により小型化し、基板上に集積することにより、システムの小型化、低価格化を可能とするとともに、分析に必要なサンプルや試薬の量や分析により生じる廃液の量を大幅に低減することができる。
【0003】
微小化学分析システムを構成する主要な要素の1つとして搬送機構がある。この搬送機構は、分析に必要な試料、試薬を搬入口から導入して所定の分析、計測、混合、反応、分離部、検出等の各部位に搬送し、その後の廃液を排出口まで搬送するものであり、ポンプ、バルブ、流路(チャネル)等からなっている。例えば、特許文献1には、圧電素子を用いて液体を精度よく微小量噴出する液体ディスペンサが、特許文献2には、流体分析に適した微細な流体搬送構造がそれぞれ開示されている。
【特許文献1】特開2001−234868号公報
【特許文献2】特開2002−243748号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、従来の微小化学分析システムを構成する搬送機構においては、試料を流路に流して搬送していたので、分析に最小限必要な量を超える量の試料を必要とし、1回の分析に余分な量の試料を必要とする問題があった。特に生化学分野では必要とする試料の量は少ない方が望ましく、また、一定量の試料がないため分析できないこともあった。さらに、廃液の量も多くなる問題があった。また、流路等に試料が付着するため、新たな試料の分析を行い再利用するためには、流路等を洗浄する必要があり、1回の使用のみで使い捨てる場合には、コスト的に割高なものとなるとともに、対環境性に問題があった。また、固体試料や粘性の高い試料を搬送する機構は、開発されておらず、これらの試料を用いた分析ができないという問題があった。
【0005】
本発明は、かかる問題を解決すべくなされたものであり、従来のような試料を「流す」必要をなくして、微小固体や液滴を搬送することができる搬送機構、及びこの搬送機構を用いた微小化学分析システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、請求項1に記載の搬送機構は、所定の搬送方向に搬送される被搬送体と、前記搬送方向に移動するときは前記被搬送体と係合し、前記搬送方向と反対方向に移動するときは前記被搬送体との係合が解除される搬送体と、駆動により前記搬送方向及びその反対方向に前記搬送体を往復移動させる駆動部を備えることを特徴としている。
【0007】
請求項2に記載の搬送機構は、所定の搬送方向に搬送され、鋸歯を設けた被搬送体と、
前記搬送方向に移動するときは前記被搬送体の鋸歯と係合し、前記搬送方向と反対方向に移動するときは前記被搬送体の鋸歯と滑り合う鋸歯を設けた搬送体と、駆動により前記搬送方向及びその反対方向に前記搬送体を往復移動させる駆動部を備えることを特徴としている。
【0008】
請求項3に記載の搬送機構は、所定の搬送方向に搬送される被搬送体と、前記搬送方向に移動するときは前記被搬送体と係合し、前記搬送方向と反対方向に移動するときは前記被搬送体から離れる方向に移動することにより前記被搬送体との係合を解除する搬送体と、駆動により前記搬送方向及びその反対方向に前記搬送体を往復移動させる駆動部を備えることを特徴としている。
【0009】
請求項4に記載の搬送機構は、請求項1から3の何れか1項に記載の搬送機構において、前記搬送体を、前記被搬送体が搬送される搬送路に沿って連続して設けたことを特徴としている。
【0010】
請求項5に記載の搬送機構は、所定の搬送方向に搬送される被搬送体と、前記被搬送体がその間を搬送される対向する壁面を備え、前記搬送方向に連続して設けられた複数の搬送体と、駆動により、前記壁面の間の距離が前記被搬送体の幅を超える位置、及び前記壁面の間の距離が前記被搬送体の幅以下となる位置に前記壁面が位置するように、前記搬送体を往復移動させる駆動部を備えることを特徴としている。
【0011】
請求項6に記載の搬送機構は、請求項1から5の何れか1項に記載の搬送機構において、前記被搬送体が搬送される方向に分岐路を設け、前記分岐路の入り口に壁面の間の距離を制御する部材を設け、前記制御部材の位置を変えることにより、前記搬送体の幅を超える幅の分岐路に前記搬送体を移動させるように構成したことを特徴としている。
【0012】
請求項7に記載の搬送機構は、前記分岐路を有するブロックと、前記搬送方向を一定として前記被搬送体が搬送されるように、請求項1から5の何れか1項に記載の搬送機構によって構成された直線搬送ブロックと、前記搬送方向を変化させながら前記被搬送体が搬送されるように、請求項1から5の何れか1項に記載の搬送機構によって構成された曲線搬送ブロックのうち、いずれか2以上の前記ブロックを組み合わせて構成したことを特徴としている。
【0013】
請求項8に記載の微小化学分析システムは、液滴又は微小固形物を載置する前記被搬送体を、請求項1から7の何れか1項に記載の搬送機構によって搬送することを特徴としている。
【発明の効果】
【0014】
請求項1に記載の搬送機構によれば、駆動部の駆動により搬送方向及びその反対方向に往復移動する搬送体が、搬送方向に移動するときは被搬送体と係合し、搬送方向と反対方向に移動するときは被搬送体との係合が解除されるので、駆動部が連続して駆動することによって、被搬送体を搬送方向に連続して搬送することができる。
【0015】
請求項2に記載の搬送機構によれば、駆動部の駆動により搬送方向及びその反対方向に往復移動する搬送体が、搬送方向に移動するときは被搬送体の鋸歯と係合し、搬送方向と反対方向に移動するときは被搬送体の鋸歯と滑り合う鋸歯を設けているので、駆動部が連続して駆動することによって、被搬送体を搬送方向に連続して搬送することができるとともに、簡易な構成とすることができる。
【0016】
請求項3に記載の搬送機構によれば、駆動部の駆動により搬送方向及びその反対方向に往復移動する搬送体が、搬送方向に移動するときは被搬送体と係合し、搬送方向と反対方向に移動するときは被搬送体から離れる方向に移動することにより被搬送体との係合を解除するので、駆動部が連続して駆動することによって、簡易な構成で被搬送体を搬送方向に連続して搬送することができるともに、簡易な構成とすることができる。
【0017】
請求項4に記載の搬送機構によれば、搬送体を、被搬送体が搬送される搬送路に沿って連続して設けているので、被搬送体を搬送体間に渡って搬送することができ、搬送距離を長くすることができる。
【0018】
請求項5に記載の搬送機構によれば、駆動部の駆動により、壁面の間の距離が被搬送体の幅を超える位置、及び壁面の間の距離が被搬送体の幅以下となる位置に壁面が位置するように、搬送体が往復移動するので、駆動部の駆動によって、壁面が脈動するように搬送体を移動させることにより、被搬送体を搬送方向に搬送することができる。
【0019】
請求項6に記載の搬送機構によれば、被搬送体が搬送される方向に分岐路を設け、分岐路の入り口に壁面の間の距離を制御する部材を設け、制御部材の位置を変えることにより、搬送体の幅を超える幅の分岐路に搬送体を移動させるように構成したので、被搬送体を所望の分岐路に確実に移動させることができる。
【0020】
請求項7に記載の搬送機構によれば、分岐路を有するブロックと直線搬送ブロックと曲線搬送ブロックを組み合わせて搬送機構を構成しているので、搬送機構の構築や変更を容易に行うことができる。
【0021】
請求項8に記載の微小化学分析システムによれば、液滴又は微小固形物を載置する被搬送体を、前記特徴を備えた搬送機構によって搬送するので、分析に必要な最小量の試料を微小化学分析システムの分析部に搬送することができるとともに、従来の技術ではできなかった固体微小物や液滴の試料を搬送することができる。
【発明を実施するための最良の形態】
【0022】
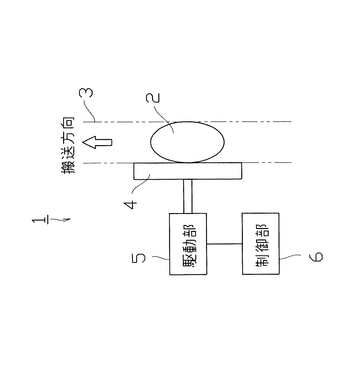
本発明に係る搬送機構1は、図1に示すように、所定の搬送方向に搬送される被搬送体2と、該被搬送体2と係合する搬送体4と、駆動により搬送体4を前記搬送方向に移動させる駆動部5を備え、駆動部5を駆動することによって搬送体4に係合された被搬送体2を搬送方向に搬送するものである。搬送体4は、被搬送体2が搬送される搬送路3の少なくとも一部を構成する。
【0023】
搬送機構1は、さらに、被搬送体2と搬送体4との係合を解除する係合解除手段を備えている。微小変位往復移動するマイクロアクチュエータ等から駆動部5を構成すると、駆動部5の駆動により搬送体4が往復移動する。例えば、往動時に被搬送体2と係合する搬送体4を搬送方向に移動させ、復動時に被搬送体2との係合を解除させた搬送体4を搬送方向と反対方向への移動し、往動時前の位置に復帰させることによって、被搬送体2を搬送方向へ連続的に搬送することができる。搬送体4が微小変位だけ往復移動するものであっても、この微小変位を積算し被搬送体を大変位搬送することができる。また、搬送機構1は駆動部4の駆動などを制御する制御部6を備えている。
【0024】
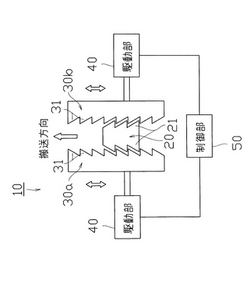
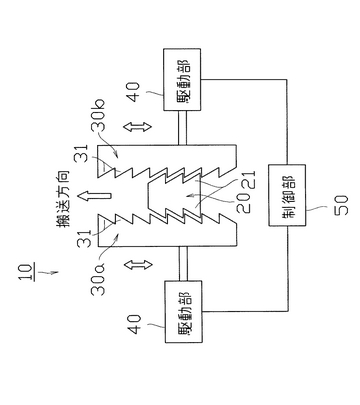
本発明の第1の実施の形態に係るラチェット機構を用いた搬送機構について図面に基づき説明する。このラチェット機構を用いた直線搬送機構10は、図2に示すように、鋸歯21を設けた被搬送体20と、該被搬送体の鋸歯21と係合する鋸歯31(31a及び31b)を設けた搬送体30(30a及び30b)と、駆動により前記搬送方向及びその反対方向に搬送体30を往復移動させる駆動部40を備え、駆動部40の駆動により被搬送体20を搬送方向に連続的に直進搬送するものである。
【0025】
被搬送体20は、その中心線を挟んで対称になるように傾斜する鋸歯21を両側面に刻設している。搬送体30は、被搬送体20を挟み互いに対向して位置する第1の搬送体30aと第2の搬送体30bからなり、第1の搬送体30aと第2の搬送体30bとが、その間に挟まれた被搬送体20が搬送される搬送路の一部を構成している。第1及び第2の搬送体30a,30bは、被搬送体20の鋸歯21と係合するように当該鋸歯21の傾斜と反対方向に傾斜する複数の鋸歯31をそれぞれ刻設している。第1及び第2の搬送体30a,30bは、駆動部40の往復移動によって被搬送体20の搬送方向と平行に互いに反対方向に所定の振幅だけ往復移動する。すなわち、第1の搬送体30aが搬送方向に移動するとき、第2の搬送体30bは搬送方向と反対方向に移動し、第1の搬送体30aが搬送方向と反対方向に移動するとき、第2の搬送体30bは搬送方向に移動するように、第1及び第2の搬送体30a,30bの往復移動をもたらす駆動部40を制御部50が制御する。駆動部40は、静電マイクロアクチュエータ、圧電マイクロアクチュエータ等の数μm程度の振幅をもったリニア往復運動するマイクロアクチュエータである。また、静電マイクロモータの回転運動をリニア往復運動に変換してもよい。なお、被搬送体及び搬送体の鋸歯21,31は、図2に示すような片歯の他、爪歯、鉤歯等であってもよく、搬送体30が搬送方向に移動する際には搬送体30に係合された被搬送体20が搬送体30とともに移動し、搬送体30が搬送方向と反対方向に移動する際には被搬送体20の鋸歯21と搬送体30との鋸歯31が滑り合うために被搬送体20と搬送体30とが係合せず、搬送体30の移動によっては被搬送体20が移動しないものであればよい。被搬送体20及び搬送体30の鋸歯21,31の歯間隔は、搬送体30の振幅未満である。
【0026】
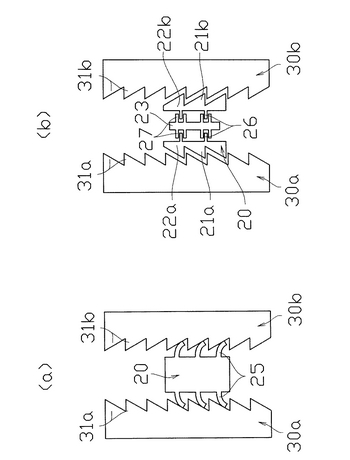
ところで、実際には、搬送体30の鋸歯31と被搬送体20との鋸歯21が滑り合うとき、鋸歯21,31の干渉によって搬送方向と直交する方向への相対的な変位が生じるので、この変位を吸収するために、搬送方向と直交する方向に被搬送体又は搬送体の鋸歯21,31を適宜逃すことができるように逃し部を設ける必要がある。例えば、図3(a)に示すように、第1の搬送体の鋸歯31aと係合する第1の鋸歯21aを外側面に刻設した第1の鋸歯部22aと、第2の搬送体の鋸歯31bと係合する第2の鋸歯21bを外側面に設けた第2の鋸歯部22bと、第1及び第2の鋸歯部22a,22bとの間に位置する中央部23と、第1及び第2の鋸歯部22a,22bの内側面と中央部23の両側面とをそれぞれ可動可能に連結するばね部(逃し部)24とを備える被搬送体20とする。ここで、内側面とは被搬送体20の縦中心側の側面を、外側面とは被搬送体20の縦中心軸から近い側の側面を意味する。これにより、被搬送体の鋸歯21と搬送体との鋸歯31が滑り合うとき、鋸歯21,31の干渉に伴って第1又は第2の鋸歯部22a,22bが中央部23に向かって適宜移動するので、被搬送体20を搬送方向に向かって滑らかに搬送することができる。なお、中央部23を設けることなく、第1及び第2の鋸歯部22a,22bを直接ばね部24により連結してもよい。
【0027】
また、図3(b)に示すように、第1及び第2の搬送体30a,30bにそれぞれ固定壁33に対して搬送方向と直交する方向に可動可能に連結するばね部(逃し部)32を設けてもよい。これにより、被搬送体の鋸歯21と搬送体の鋸歯31とが滑り合うとき、鋸歯21,31の干渉に伴って第1又は第2の鋸歯体30a,30bが固定壁33に向かって適宜移動するので、被搬送体20を搬送方向に向かって滑らかに搬送することができる。なお、第1又は第2の搬送体30a,30bの何れかのみを固定壁33にばね部32により連結してもよい。
【0028】
また、図4(a)に示すように、被搬送体20の鋸歯21を可撓性を有する脚(逃し部)25としてもよい。これにより、被搬送体20の脚25と搬送体の鋸歯31とが滑り合うとき、脚25は鋸歯31に沿って適宜撓むので、被搬送体20を搬送方向に向かって滑らかに搬送することができる。
【0029】
また、図4(b)に示すように、第1及び第2の鋸歯部22a,22bと中央部23とをそれぞれ搬送方向とは直交する方向に可動可能とするともに、第1及び第2の鋸歯部21a,22bと中央部23との搬送方向と平行な方向への相対移動を規制する規制部(逃し部)を被搬送体20に設けてもよい。この規制部は、第1及び第2の鋸歯部22a,22bの内側面からそれぞれ中央部23に向かって突出する鋸歯部突起26と、中央部23の両側面から第1及び第2の鋸歯部22a,22bに向かってそれぞれ突出し、前記鋸歯部突起26と係合する中央部突起27とからなる。これにより、被搬送体20の鋸歯21と搬送体30の鋸歯31とが滑り合うとき、鋸歯21,31の干渉に伴って第1又は第2の鋸歯部22a,22bが中央部23に向かって適宜移動するので、被搬送体20を搬送方向に向かって滑らかに搬送することができる。また、第1及び第2の鋸歯部22a,22bが搬送体30と共に移動又は静止するとき、第1及び第2の鋸歯部22a,22bと中央部23とは互いに係合するので、これらは一体化した状態で被搬送体20を構成し続ける。なお、中央部23を設けることなく、第1及び第2の鋸歯部22a,22bを直接突起により連結してもよい。
【0030】
図2に示した直線搬送機構10の搬送動作について図面に基づき説明する。この直線搬送機構10は、図示しないが、図2に示す駆動部40や制御部50、及び図3(a)から図3(d)等に示す逃し部を設けるものである。図5(a)に示すように、被搬送体20は、第1及び第2の搬送体30a,30bとの間に挟まれて位置している。この状態から、図5(b)に示すように、第1の搬送体30aが搬送方向に移動すると同時に第2の搬送体30bが搬送方向と反対方向に移動する。このとき、被搬送体の鋸歯21aと第1の搬送体の鋸歯31aとが係合し、被搬送体の鋸歯21bと第2の搬送体の鋸歯31bとは滑り合うので、被搬送体20は第1の搬送体30aの移動に伴って搬送方向に移動する。次に、図5(c)に示すように、第1の搬送体30aが搬送方向の反対方向に移動すると同時に第2の搬送体30bは搬送方向に移動する。このとき、被搬送体の鋸歯21aと第1の搬送体の鋸歯31aとは滑り合い、被搬送体の鋸歯21bと第2の搬送体の鋸歯31bとは係合するので、被搬送体20は第2の搬送体30bの移動に伴って搬送方向に移動する。このような第1及び第2の搬送体30a,30bの往復移動が繰り返されることによって、被搬送体20は搬送方向に連続的に直進搬送される。
【0031】
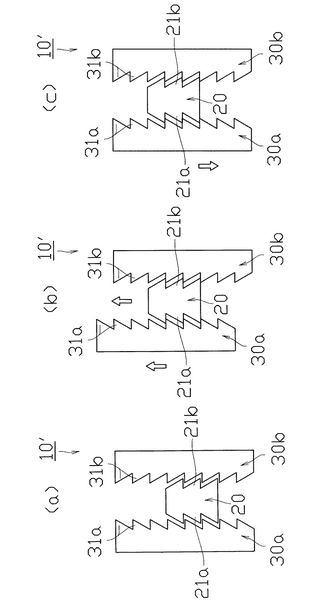
また、図6(a)から図6(c)に示すように、第1の搬送体30aのみを往復移動させ、第2の搬送体30bを常に固定する直線搬送機構10´としてもよい。図6(a)に示す状態から、図6(b)に示すように、第1の搬送体30aが搬送方向に移動すると、被搬送体の鋸歯21aと第1の搬送体の鋸歯31aとは係合するので、被搬送体20は第1の搬送体30aの移動に伴って搬送方向に移動する。次に、図6(c)に示すように、第1の搬送体30aが搬送方向の反対方向に移動すると、被搬送体の鋸歯21bと第2の搬送体の鋸歯31bとの係合によって被搬送体20の搬送方向の反対方向への移動は阻止されるので、被搬送体の鋸歯21aと第1の搬送体の鋸歯31aとは滑り合い、被搬送体20は停止した状態を保つ。このような第1の搬送体30aの往復移動が繰り返されることによって、被搬送体20は搬送方向に連続的に直進搬送される。第1及び第2の搬送体30a,30bが往復移動する図5に示した直線搬送機構10に比べて、第1の搬送体30aの一回の往復移動当たりの被搬送体20の移動距離は半分になる。
【0032】
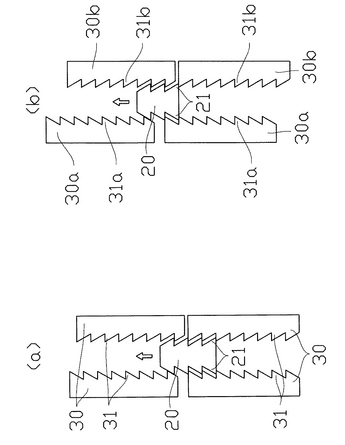
搬送体30を搬送方向に連続して設けた直線搬送機構70について図面に基づき説明する。この直線搬送機構70は、図7(a)に示すように、図2に示した搬送体30を搬送方向に連続させて配置し、各搬送体30をそれぞれ搬送方向と平行に往復振動させる駆動部(不図示)と、各駆動部を独立して制御する制御部(不図示)を備え、駆動部を駆動することによって搬送体30に係合された被搬送体20を搬送体30間を受け渡して搬送方向に直進搬送するものである。搬送体30は、搬送方向への往復移動によって互いに干渉しない隙間を少なくとも設けて、搬送方向に連続して配置されている。なお、図示しないが、前記に示した被搬送体や搬送体の各種態様を適用することができる。
【0033】
搬送元の搬送体30から搬送先の搬送体30へ搬送される被搬送体20は、図7(b)に示すように、搬送元の搬送体の鋸歯31からその鋸歯21の一部が離脱する。そして、図7(c)に示すように、搬送先の搬送体30が移動して当該搬送体の鋸歯31と、この離脱した鋸歯21とが係合することによって、搬送元の搬送体30から搬送先の搬送体30へ受け渡され被搬送体20は搬送される。その後、図7(d)に示すように、搬送先の搬送体30のみの往復移動によって、被搬送体20は搬送方向に搬送される。
【0034】
搬送元の搬送体30から搬送先の搬送体30へ被搬送体20を受け渡すとき、図7(b)に示すように、被搬送体20の鋸歯21の一部が搬送体30の鋸歯31と係合していないので、被搬送体20の搬送が不安定になり得る。そこで、図8(a)に示すように、被搬送体の鋸歯21の歯数を増やしたり、図8(b)に示すように、対向して位置する第1及び第2の搬送体30a,30bを搬送方向に位置ずれさせて配置することにより、受け渡し時の被搬送体の鋸歯21と搬送体の鋸歯31との係合する本数を増やし、被搬送体20の受け渡しをより安定して行うことができる。
【0035】
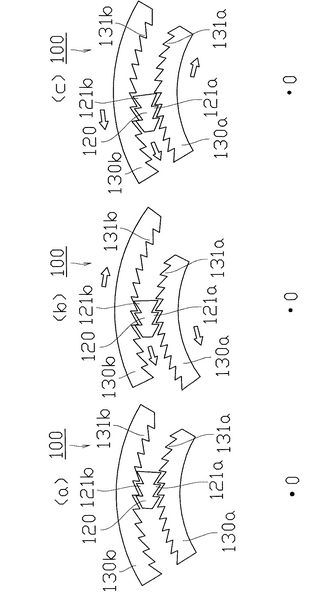
以下、ラチェット機構を用いた回転搬送機構100について図面に基づき説明する。この回転搬送機構100は、図9(a)に示すように、鋸歯121(121a及び121b)を設けた被搬送体120と、該被搬送体の鋸歯121と係合する鋸歯131(131及び131b)を設けた搬送体130(130a及び130b)と、搬送体130を駆動により往復回動させる駆動部(不図示)、駆動部の駆動を制御する制御部(不図示)を備え、駆動部を駆動することによって搬送体を介して被搬送体120を左回りの搬送方向(搬送体130の回動方向の接線方向)に連続的に回転搬送するものである。
【0036】
被搬送体120は、その中心線を挟んで対称になるように傾斜する鋸歯121a,121bを両側面に刻設しており、中心Oを中心として左回りの搬送方向に搬送されるものである。搬送体130は、中心Oを中心とする所定の円弧からなる側面によって被搬送体120を挟み互いに対向して位置する第1の搬送体130aと第2の搬送体130bとからなり、第1の搬送体130aと第2の搬送体130bとが、その間に挟まれる被搬送体120が搬送される搬送路を構成している。第1の搬送体130aは、被搬送体120の内側面の鋸歯121aと係合するように当該鋸歯121aの傾斜と同方向に傾斜する複数の鋸歯131aを円弧からなる外周面に刻設している。第2の搬送体130bは、被搬送体120の外側面の鋸歯121bと係合するように当該鋸歯121bの傾斜と同方向に傾斜する複数の鋸歯131bを円弧からなる内周面に刻設している。ここで、内とは中心Oに近い側を、外とは中心Oから離れた側を意味している。第1及び第2の搬送体130a,130bは、駆動部の駆動によって中心Oを中心に互いに反対方向に所定の振幅だけ往復回動する。すなわち、第1の搬送体130aが左回りに回転するとき、第2の搬送体130bは右回りに回転し、第1の搬送体130aが左回りに回転するとき、第2の搬送体130bは右回りに回転する。駆動部は、静電マイクロアクチュエータ、圧電マイクロアクチュエータ等の数度の振幅をもった往復回動するマイクロアクチュエータである。また、静電マイクロモータの回転移動を往復回動に変換してもよい。搬送体130の歯間隔は、搬送体130の振幅未満である。なお、図示しないが、他の態様も適用することができる。
【0037】
次に、この回転搬送機構100の搬送動作について図面に基づき説明する。図9(a)に示す状態から、図9(b)に示すように、第1の搬送体130aが左回りに回転すると同時に第2の搬送体130bが右回りに回転する。このとき、被搬送体の鋸歯121aと第1の搬送体の鋸歯131aとは係合し、被搬送体の鋸歯121bと第2の搬送体の鋸歯131bとは滑り合うので、被搬送体120は第1の搬送体130の回転に伴って左回りに回転する。次に、図9(c)に示すように、第1の搬送体130aが右回りに移動すると同時に第2の搬送体130bは左回りに回転する。このとき、被搬送体の鋸歯121aと第1の搬送体の鋸歯131aとは滑り合い、被搬送体の鋸歯121bと第2の搬送体の鋸歯131bとは係合するので、被搬送体120は第2の搬送体130bの回転に伴って左回りに移動する。このような第1及び第2の搬送体130a,130bの往復回動が繰り返されることによって、被搬送体120は左回りに連続的に回転搬送される。なお、右回りに設計した場合には、被搬送体120を右回りに連続的に回転搬送することも可能である。
【0038】
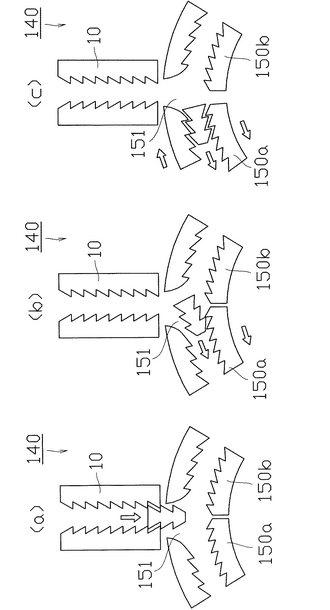
以下、ラチェット機構を用いた分岐搬送機構140について図面に基づき説明する。この分岐搬送機構140は、図10(a)に示すように、図2に示した直進搬送機構10によって搬送された被搬送体20を、左回りに回転搬送する左回り回転搬送機構150aと右回りに回転搬送する右回り回転搬送機構150bを組み合わせ配置することによって、搬送方向を選択して搬送するものである。直進搬送機構10によって搬送された被搬送体20は、左回り回転搬送機構150aと右回り回転搬送機構150bとの間に設けた開口151から、左回り回転搬送機構150a及び右回り回転搬送機構150bを構成する各搬送体によって構成される搬送路内に流入される。図示しない制御部は、作業者の指示等によって、左回り回転搬送機構150aか右回り回転搬送機構150bの何れか一方を動作させる。例えば、左回り回転搬送機構150aを動作させた場合には、図10(b)及び図10(c)に示すように、被搬送体20は、左回り回転搬送機構150aの搬送体によって左回りに搬送される。
【0039】
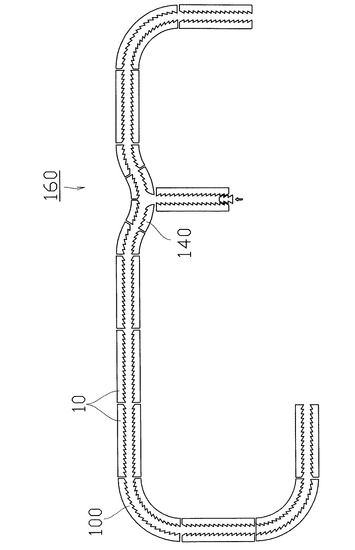
ラチェット機構を用いた複合搬送機構160について図面に基づき説明する。この複合搬送機構160は、図11に示すように、図2に示した直進搬送機構10等、図9に示した回転搬送機構100、図10に示した分岐搬送機構140とを適宜組み合わせることにより、所望の搬送路を構成したものである。このように、所定の搬送機構を組み合わせることにより搬送路を構成することができるので、搬送路の構築や変更を容易に行うことができる。また、各搬送機構の搬送体は、それぞれ独立に制御部(不図示)によって制御するので、同一の搬送路に同時に複数の被搬送体を搬送してもよい。
【0040】
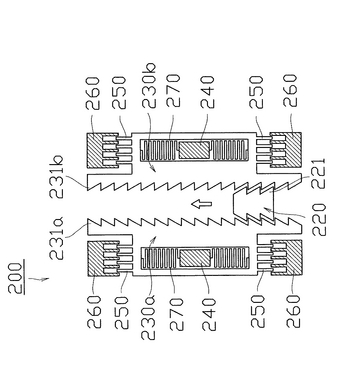
以下、ラチェット機構を用いた搬送機構において、駆動部に櫛歯型静電マイクロアクチュエータを用いた実施例について図面に基づき説明する。この櫛歯型静電マイクロアクチュエータを用いた直線搬送機構200は、図12に示すように、鋸歯221を設けた被搬送体220と、該被搬送体220の鋸歯221と係合する鋸歯231(231a及び231b)を設け、固定柱240に弾性連結された搬送体230(230a及び230b)と、該搬送体230に設けられた可動電極250と、該可動電極250に対応して設けられた固定電極260と、可動電極250及び固定電極260の電圧を制御する制御部(不図示)を備え、搬送体230を介して被搬送体220を搬送方向に連続的に直進搬送するものである。なお、図中の斜線部は固定部である。なお、図示しないが、他の態様も適用することができる。
【0041】
被搬送体220は、同方向に傾斜する鋸歯221を両側面に刻設している。搬送体230は、被搬送体220を挟んで互いに対向して位置する第1の搬送体230aと第2の搬送体230bからなり、第1の搬送体230aと第2の搬送体230bとが、その間に挟まれる被搬送体220が搬送される搬送路を構成している。第1及び第2の搬送体230a,230bは、被搬送体220の鋸歯221と係合するように当該鋸歯221の傾斜と反対方向に傾斜する複数の鋸歯231a,231bをそれぞれ刻設している。被搬送体及び搬送体の櫛歯221,231の歯間隔は数μm程度である。第1及び第2の搬送体230a,230bは、搬送方向に延びる多数の櫛歯を備えた櫛歯状の可動電極250を固設している。固定電極260は、可動電極250の櫛歯に対応させた搬送方向に延びる多数の櫛歯を備えた櫛歯状の固定された電極であり、これら各電極250,260は電源(不図示)に接続され、正負の電圧が印加される。可動電極250と固定電極260に正負の互いに異なる極性の電圧を印加すると、これらの電極間に生じる引力によって、各電極250,260の櫛歯が重なり合うように、可動電極250が固定電極260側に移動する。可動電極250の変位量は数μm程度であり、被搬送体及び搬送体の鋸歯221,231の歯間隔よりも大きい。可動電極250の移動により、可動電極250が固設された搬送体230は移動する。また、第1及び第2の搬送体230a,230bは、搬送方向と平行な方向に主に弾性変形するばね等の弾性体270によって、それぞれ固定柱240に連結されている。これにより、搬送方向と平行な方向に移動する搬送体230の移動時における摩擦の影響を低減し安定した移動とすることができるとともに、可動電極250と固定電極260との接触を防止することができる。さらに、図示していないが、搬送方向と直交する方向に主に弾性変形するばね等の弾性体によっても、第1及び第2の搬送体230a,230bがそれぞれ固定柱240に連結されていてもよい。
【0042】
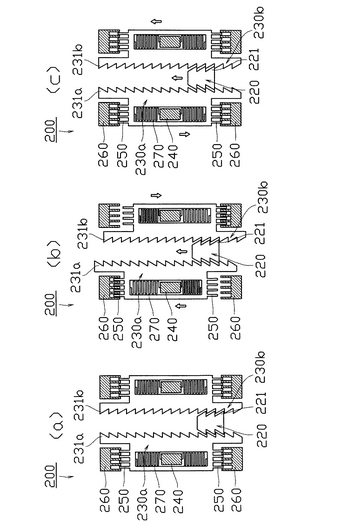
この直線搬送機構200の搬送動作について図面に基づき説明する。図13(a)に示すように、被搬送体220は、第1及び第2の搬送体230a,230bとの間に挟まれて位置しており、各電極250,260に電圧が印加されていない。次に、例えば、第1の搬送体230aの可動電極250に正の電圧を印加し、第1の搬送体230aに図中上側の可動電極250に対応する固定電極260に負の電圧を印加する。また同時に、例えば、第2の搬送体230bの可動電極250に正の電圧を印加し、第2の搬送体230bの図中下側の可動電極250に対応する固定電極260に負の電圧を印加する。これにより、図13(b)に示すように、第1の搬送体230aが搬送方向に移動すると同時に第2の搬送体230bが搬送方向と反対方向に移動する。このとき、被搬送体の鋸歯221と第1の搬送体の鋸歯231aとは係合し、被搬送体の鋸歯221と第2の搬送体の鋸歯231bとは滑り合うので、被搬送体220は第1の搬送体230aの移動に伴って搬送方向に移動する。次に、各電極250,260に印加している電圧を解放する。これにより、弾性体270の復元力によって、図13(c)に示すように、第1の搬送体230aが搬送方向の反対方向に移動すると同時に第2の搬送体230bは搬送方向に移動する。このとき、被搬送体の鋸歯221と第1の搬送体の鋸歯231aとは滑り合い、被搬送体の鋸歯221と第2の搬送体の鋸歯231bとは係合するので、被搬送体220は第2の搬送体230bの移動に伴って搬送方向に移動する。このような第1及び第2の搬送体230a,230bの往復移動が繰り返されることによって、被搬送体220は搬送方向に連続的に直進搬送される。
【0043】
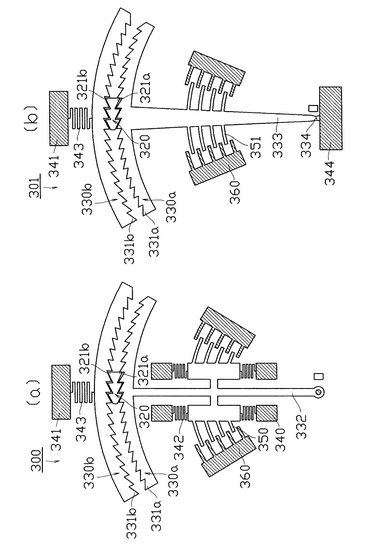
櫛歯型静電マイクロアクチュエータを用いた回転搬送機構300は、図14(a)に示すように、鋸歯321を設けた被搬送体320と、該被搬送体の鋸歯321と係合する鋸歯331を設け、固定柱340に弾性連結され、回動可能な第1の搬送体330aと、被搬送体の鋸歯321と係合する鋸歯331bを設け、固定柱341に弾性連結された第2の搬送体330bと、第1の搬送体330aに設けられた可動電極350と、該可動電極350に対応して設けられた固定電極360と、可動電極350及び固定電極360の電圧を制御する制御部(不図示)を備え、第1及び第2の搬送体330a,330bを介して被搬送体320を左回り方向の搬送方向に連続的に回転搬送するものである。
【0044】
被搬送体320は、その中心線を挟み対称となるように傾斜する鋸歯321を両側面に刻設しており、中心軸Oを中心として左回りの搬送方向に搬送されるものである。第1及び第2の搬送体330a,330bは、中心軸Oを中心とする所定の円弧からなる側面の間に被搬送体320を挟み互いに対向して位置しており、これら第1及び第2の搬送体330a,330bによって、その間に挟まれた被搬送体320が搬送される搬送路が構成されている。第1の搬送体330aは、被搬送体320の内側面の鋸歯321aと係合するように当該鋸歯321aの傾斜と同方向に傾斜する複数の鋸歯331aを円弧からなる外周面に刻設している。第2の搬送体330bは、被搬送体320の外側面の鋸歯321bと係合するように当該鋸歯321bの傾斜と同方向に傾斜する複数の鋸歯331bを円弧からなる内周面に刻設している。ここで、内とは中心軸Oに近い側を、外とは中心軸Oから離れた側を意味している。被搬送体及び搬送体の櫛歯321,331の歯間隔は数μm程度である。第1の搬送体331は、中心軸Oを中心として回動可能な回動棒322を設けている。この回動棒332は、直線状に延びる多数の平行な櫛歯を備えた櫛歯状の可動電極350を固設している。これら可動電極350は電源(不図示)に接続され正負の電圧が印加される。固定電極360は、可動電極350の櫛歯に対応させた直線状に延びる多数の平行な櫛歯を備えた櫛歯状の固定された電極であり、電源(不図示)に接続され正負の電圧が印加される。可動電極350の移動により、可動電極350が固設された回動棒332が回転し、第1の搬送体330aが中心軸Oを中心に回転する。可動電極350の変位量は数μm程度であり、第1の搬送体330aは数度の範囲で回動し、第1の搬送体の鋸歯331a部分の変位量は、被搬送体及び搬送体の櫛歯321,331の歯間隔よりも大きい。また、可動電極350は、弾性変形するばね等の弾性体342によって固定柱340に連結されている。これにより、第1の搬送体330aの回動時における摩擦の影響を低減し安定した移動とすることができるとともに、可動電極350と固定電極360との接触を防止することができる。一方、第2の搬送体330bは、弾性変形するばね等の弾性体(逃し部、図3(b)参照。)343によって、固定柱341に連結されている。これにより、第1又は第2の搬送体の鋸歯331a,331bと被搬送体の鋸歯321とが滑り合うとき、鋸歯の干渉によって第2の搬送体330bが固定柱341に向かって適宜移動するので、被搬送体320を搬送方向に向かって滑らかに搬送することができる。
【0045】
この回転搬送機構300の搬送動作について図面に基づき説明する。図14(a)に示すように、被搬送体320は、第1及び第2の搬送体330a,330bとの間に挟まれて位置しており、各電極350,360に電圧は印加されていない。次に、例えば、可動電極350に正の電圧を印加し、図中左側の可動電極350に対応する固定電極360に負の電圧を印加する。これにより、図14(b)に示すように、第1の搬送体330aが中心軸Oを中心に左回りに回転する。このとき、被搬送体の鋸歯321aと第1の搬送体の鋸歯331aとは係合し、被搬送体の鋸歯321bと第2の搬送体の鋸歯331bとは滑り合うので、被搬送体320は第1の搬送体330の回転に伴って搬送方向に移動する。次に、各電極350,360に印加している電圧を解放する。これにより、弾性体342の復元力によって、第1の搬送体330aは中心軸Oを中心に右回りに回転する。このとき、被搬送体の鋸歯321aと第1の搬送体の鋸歯331aとは滑り合うので、被搬送体320は移動しない。このような第1の搬送体330aの往復回動が繰り返されることによって、被搬送体320は左回りに連続的に回転搬送される。なお、右回りに設計した場合には、被搬送体320を右回りに連続的に回転搬送することも可能である。
【0046】
ところで、前記可動電極350及び固定電極360に互いに極性の異なる電圧が印加されると、各電極350,360の櫛歯が重なり合うように、可動電極350が中心軸Oを中心に回動する。そのため、各電極350,360の櫛歯が接触するおそれが生じる。これを解消するために、図15(a)に示すように、可動電極350及び固定電極360に設けた各櫛歯を回転軸Oを中心とし円弧状に延びる形状としている。これにより、各電極350,360の櫛歯が重なり合うように可動電極360が回動するとき、隣接する櫛歯間の距離が一定に保たれるので、各電極350,360の櫛歯が接触するおそれがない。
【0047】
また、ばね等を用いることなく、部材もしくは部材の一部分を弾性変形容易とすることにより、搬送機構を構成してもよい。例えば、回転搬送機構301は、図15(b)に示すように、回動棒333の固定柱344への連結部付近の部材幅を狭めることにより、弾性変形容易な部位334を設けている。回動棒333には可動電極351が設けられており、適切な電圧が印加され可動電極351が移動すると、回動棒333が部位334を回転中心Oとして回動し、電圧が解放されると、部位334の復元力によって回動棒333が元の位置に戻る。回転搬送機構302は、図16(a)に示すように、可動電極352を固設する枠に、先端形状が弧状の押部353が設けられ、この押部353と固定柱334,345とが幅狭の細長部354によってそれぞれ連結されている。適切な電圧が印加され可動電極352が固定電極361へ向かって移動すると、これに伴い回動棒333が押部353に押され部位334を回転中心Oとして回転する。この時、細長部354は押部353の移動に伴って弾性変形する。電圧が解放されると、部位334及び細長部354の復元力によって回動棒333が元の位置に戻る。回転搬送機構303は、図16(b)に示すように、可動電極352を固設する枠に、先端形状がT字状の引部355が設けられ、この引部355の先端形状に対応する凹状の嵌合部335が回動棒333に設けられている。回転搬送機構303は、可動電極352の移動に伴い引部355が嵌合部335を介して引くことよって回動棒333を回転させる。
【0048】
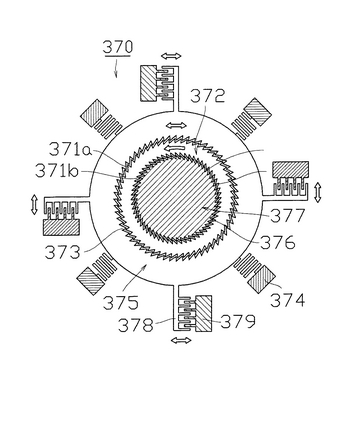
櫛歯型静電マイクロアクチュエータを用いた別の回転搬送機構370は、図17に示すように、外周面及び内周面に鋸歯371a,371bをそれぞれ刻設したドーナツ状の被搬送体372と、該被搬送体の外周面の鋸歯371aと係合する鋸歯373を内周面に刻設し、固定柱374に弾性連結され、回動可能な第1の搬送体375と、被搬送体372の内周面の鋸歯371bと係合する鋸歯376を刻設し固定された第2の搬送体377と、第1の搬送体375に設けられた可動電極378と、該可動電極378に対応して設けられた固定電極379と、可動電極378及び固定電極379の電圧を制御する制御部(不図示)とを備え、第1及び第2の搬送体375,377を介して被搬送体372を左回り方向の搬送方向に連続的に回転搬送するものである。なお、被搬送体372は、図示しないが、図3(a)等に示した逃し部を備えている。
【0049】
この回転搬送機構370の搬送動作について図面に基づき説明する。被搬送体372は、第1及び第2の搬送体375,377との間に挟まれて位置しており、各電極378,379に電圧が印加されていない状態から、例えば、全ての可動電極378に正の電圧を印加し、全ての固定電極379に負の電圧を印加する。これにより、第1の搬送体375が左回りに回転する。このとき、被搬送体372の鋸歯371aと第1の搬送体375との鋸歯373とは係合し、被搬送体372の鋸歯371bと第2の搬送体377の鋸歯376とは滑り合うので、被搬送体372は第1の搬送体375の回転に伴って左回りに回転する。次に、各電極378,379に印加している電圧を解放すると、弾性力によって、第1の搬送体375が右回りに回転する。このとき、被搬送体372の鋸歯371bは第2の搬送体377の鋸歯376との係合によって右回りへの回転移動は阻止されるので、被搬送体372は右回りに回転しない。第1の搬送体375の往復回動が繰り返されることによって、被搬送体372は左回りに連続的に回転搬送される。このように、ドーナツ状の被搬送体372が連続的に回転搬送されるので、例えばターンテーブルのように用いることができ、この被搬送体372の上に搬送物を載置することにより、搬送物を回転搬送することができる。また、ドーナツ状の被搬送体372の代わりに、図14等に示したような被搬送体320を用いた場合であっても、同様に回転搬送することができる。なお、右回りに設計した場合には、被搬送体372を右回りに連続的に回転搬送することができる。
【0050】
櫛歯型静電マイクロアクチュエータを用いたさらに別の回転搬送機構380は、図18に示すように、両側面に鋸歯381を刻設した被搬送体382と、該被搬送体の鋸歯381と係合する鋸歯383を外周面に刻設し、固定柱384に弾性連結され、回動可能な2つの搬送体385と、搬送体385の内周面から中心に向かってそれぞれ突設された可動電極386と、該可動電極386に対応して搬送体385の内側にそれぞれ設けられた固定電極387と、可動電極386及び固定電極387の電圧を制御する制御部(不図示)を備え、搬送路388を搬送されてきた被搬送体382を2つの搬送体385を介して搬送方向に搬送するものである。なお、被搬送体382は、図示しないが、図3(a)等に示した逃し部を備えている。
【0051】
この回転搬送機構380の搬送動作について図面に基づき説明する。被搬送体は、2つの搬送体385との間に挟まれて位置しており、各電極386,387に電圧が印加されていない状態から、例えば、全ての可動電極386に正の電圧を印加し、可動電極386の左回り側に位置する全ての固定電極387に負の電圧を印加する。これにより、2つの搬送体385がそれぞれ左回りに回転する。このとき、被搬送体382の鋸歯381は、図中左下の搬送体385の鋸歯383とは係合するとともに、図中右上の搬送体385の鋸歯383とは滑り合うので、被搬送体382は搬送方向に移動する。次に、各電極386,387に印加している電圧を解放すると、弾性力によって、2つの搬送体385はそれぞれ右回りに回転する。このとき、被搬送体382の鋸歯383は、図中左下の搬送体385の鋸歯383とは滑り合うとともに、図中右上の搬送体385の鋸歯383とは係合するので、被搬送体382は搬送方向に移動する。このような2つの搬送体385の往復回動が繰り返されることによって、被搬送体382は搬送方向に搬送される。
【0052】
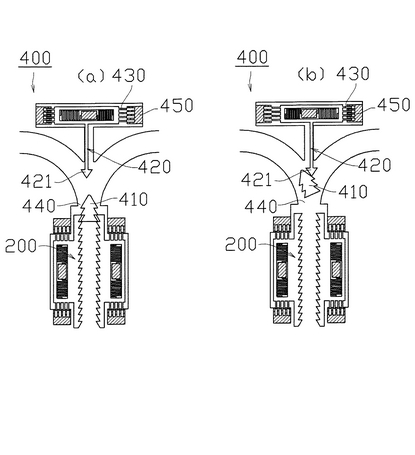
櫛歯型静電マイクロアクチュエータを用いた分岐搬送機構400は、図19(a)及び図19(b)に示すように、図12に示した櫛歯型静電マイクロアクチュエータを用いた直進搬送機構200によって搬送された被搬送体410の搬送方向を、左右に移動する方向指示部(制御部材)420によって分岐路の左右何れかの搬送路を択一的に定めるものである。方向指示部420は、分岐路の入口に位置する矢状の先端421を備え、可動電極430の移動に伴い左右に往動し、分岐路の左右何れか一方の搬送路の壁面と先端421との距離が被搬送体410の幅を超える幅とする。直進搬送機構200によって搬送された被搬送体410は、開口440から分岐路内に流入し、搬送されてきた慣性力によってそのまま直進する。図示しない制御部は、作業者の指示等によって、可動電極430及び固定電極450に印加する電圧を制御し、方向指示部の先端421を左右の何れか一方にずらして位置させる。例えば、各電極430,450に適当な電圧が印加されていない図19(a)に示す状態から、各電極430,450に適当な電圧を印加することにより、図19(b)に示すように、方向指示部の先端421を右へ移動させた場合には、右側の搬送路の壁面と先端421との距離が被搬送体410の幅未満となり、右側の搬送路への移動が阻止されるとともに、左側の搬送路の壁面と先端421との距離が被搬送体410の幅を超えるので、被搬送体410は左側の搬送路へと搬送される。なお、図中に示す被搬送体410のように、曲線からなる凸状の先端部を設けることにより、所望の搬送路へより確実に搬送することができる。
【0053】
以下、櫛歯型静電マイクロアクチュエータを用いた直進搬送機構、分岐搬送機構とから構成した複合搬送機構を適用した微小化学分析システムの実施例について図面に基づき説明する。この微小化学分析システム500は、図20に示すように、液滴や微小固体からなる試料を搭載する試料搬送車510と、該試料搬送車510又はこれに搭載した試料に対して各種の作用を行う複数の作用部520と、これら作用部520間にて試料搬送車を搬送する搬送機構530を備えるものである。作用部520は、試料搬送車510を搬送機構に投入する試料投入部520a、試料搬送車510に載置された試料に対して分析や試薬の混合を行う分析部520b、搬送機構530から排出された試料搬送車510を蓄える取出口520c等からなる。なお、試薬の混合は、分析部520bで行うことには限定されず、試料投入部520aなどで行ってもよい。また、図示しないが、複数の搬送路を1つの搬送路に合流させる合流搬送機構を設けてもよい。試料搬送車510及び搬送機構530は、シリコンからなり、半導体微細加工技術を用いて製作されている。なお、本発明に係る搬送機構は、微小化学分析システム等のバイオMEMS分野に好適に用いることができるが、それに限定されず、他にも環境測定等の各種測定、分析などの分野に用いることができる。
【0054】
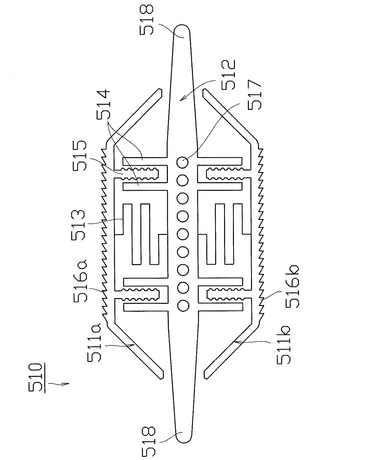
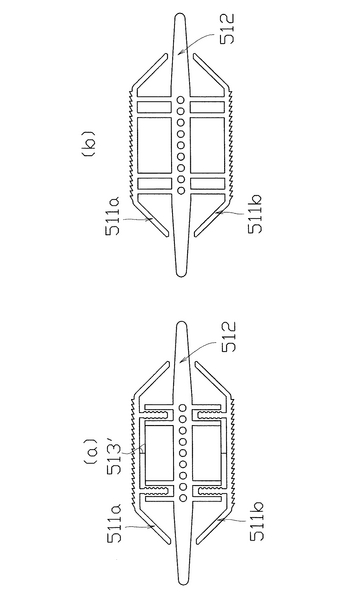
試料搬送車は、図12に示した被搬送体220等の上面に試料を入れる凹部を適宜設けたものであってよいが、図20における試料搬送車は、図21に示すように、第1及び第2の鋸歯部511a,511b、中央部512、ばね部(逃し部)513、規制部(逃し部)514,515を備えている。第1及び第2の鋸歯部511a,511bは、中央部512を挟み対称に形成されており、それぞれ搬送機構530を構成する搬送体の鋸歯と係合する鋸歯516a,516bを外側面に刻設し、中央部512に向う2つの平行な突起514を内側面に突設している。中央部512は、第1及び第2の鋸歯部511a,511bとの間に位置し、試料を入れる凹部517を上面に設け、曲面からなる凸状の先端部518を設け、第1及び第2の鋸歯部の2つの突起514がその間に位置するように第1及び第2の鋸歯部511a,511bにそれぞれ向かって突出する突起515を両側面に突設している。これら第1及び第2の鋸歯部の突起514と中央部の突起515が、第1及び第2の鋸歯部511a,511bと中央部512との搬送方向に平行な方向への所定以上の相対移動を規制する規制部を構成している。中央部の突起515には、第1及び第2の鋸歯部の突起514と対向する面に凹凸が設けられており、突起間の干渉による摩擦を低減している。ばね部513は、第1及び第2の鋸歯部511a,511bの内側面と中央部512の両側面とをそれぞれ連結するばねからなるものである。ばね部513を備えることにより、鋸歯516a,516bと搬送体の鋸歯とが滑り合うとき、鋸歯の干渉に伴って第1又は第2の鋸歯部511a,511bが中央部512に向かって適宜移動するので、試料搬送車510を搬送方向に向かって滑らかに搬送することができる。ここで、内側面とは試料搬送車510の縦中心側の側面を、外側面とは試料搬送車510の縦中心軸から離れた側の側面を意味する。なお、試料搬送車510は、図22(a)に示すように、ばね部513を変形したばね定数の大きなばね部513´を設けたものや、図22(b)に示すように、第1及び第2の鋸歯部511a,511bと中央部512とを一体に形成したものであってもよい。実施例において、試料搬送車510は長さ400μm、幅220μmである。
【0055】
搬送機構530は、図12に示した直進搬送機構200を用い搬送路が直線状の直線搬送ブロック530a、図19に示した分岐搬送機構400を用い搬送路を分岐させる分岐搬送ブロック530b、搬送路が曲線状の曲線搬送ブロック530c等の搬送ブロックを適宜組み合わせることにより、所望の搬送路を構成するものである。このように、所定の搬送ブロックを組み合わせることにより搬送路を構成することができるので、搬送路の構築や変更を容易に行うことができる。また、各搬送ブロックの搬送体は、それぞれ独立に制御部(不図示)によって制御されており、搬送路に同時に複数の試料搬送車510を搬送することができる。なお、図20に示した曲線状搬送ブロックにおいては、自在に回転するコロを曲線状の搬送路の両側面に設けており、この搬送路を搬送されてきた試料搬送車510の慣性力の減衰を抑え、隣接する搬送ブロックに送出する。なお、図14から図17に示した回転搬送機構300,370や、図18に示した搬送機構380を用いて曲線状搬送ブロック530cを構成してもよい。実施例において、各搬送ブロックは5.6mm角である。
【0056】
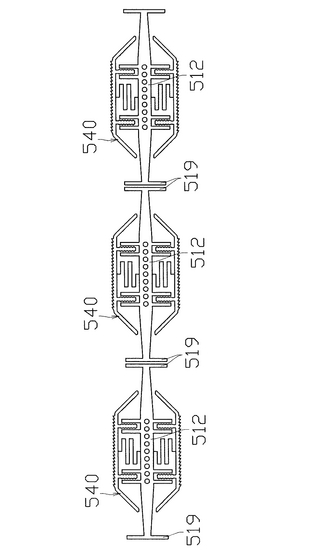
試料搬送車510は、単独で用いてもよいが、試料搬送車510の全長が長くなると曲線状の搬送路を確実に搬送することが困難になるので、複数台の試料搬送車510を一緒に搬送してもよい。例えば、図23(a)に示すように、試料搬送車510´の中央部512の前端又は後端に連結軸518を設け、この連結軸518に対して自在に回動可能な連結棒519を用い、複数台の試料搬送車510´を連結してもよい。また、図23(b)に示すように、先頭及び尾部に連結された試料搬送車510´以外の試料搬送車を、試料を入れる凹部を上面に設けた中央部512´のみからなるものとし、試料搬送車510´に連結してもよい。さらに、図24に示すように、中央部512の前端又は後端に左右方向又は斜め方向に延びる押出部519を設けた試料搬送車540を複数台連接して搬送してもよい。このような試料搬送車540が搬送路に沿って前後に連続して搬送することによって、それぞれの試料搬送車540が搬送体によって搬送されるとともに、後続の試料搬送車540によって搬送方向に押出されるので、複数の試料搬送車540を確実に搬送することができる。
【0057】
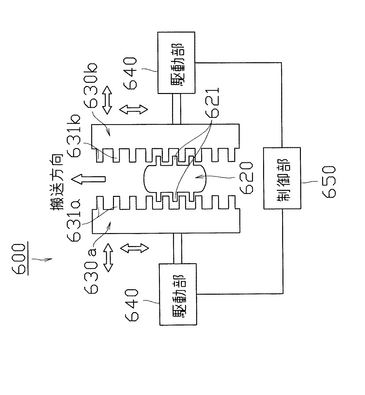
以下、本発明の第2の実施の形態に係る掃出し機構を用いた搬送機構について図面に基づき説明する。この掃出し機構を用いた直進搬送機構600は、図25に示すように、矩形状突起621を設けた被搬送体620と、該被搬送体の矩形状突起621と係合する矩形状突起631(631a及び631b)を設けた搬送体630(630a及び630b)と、被搬送体620の搬送方向と平行な方向及びその直交方向に搬送体630を駆動によりそれぞれ往復移動させる駆動部640、該駆動部640の駆動を制御する制御部650を備え、駆動部640を駆動することによって搬送体630を介して被搬送体620を搬送方向に連続的に直進搬送するものである。
【0058】
被搬送体620は、互いに平行な矩形状突起621を両側面から外側に向かって突設している。搬送体630は、被搬送体620を挟み互いに対向して位置する第1の搬送体630aと第2の搬送体630bからなり、第1及び第2の搬送体630a,630bとによって、その間に挟まれた被搬送体620を搬送される搬送路を構成している。第1及び第2の搬送体630a及び630bは、被搬送体620の矩形状突起621がその間に位置することが可能な間隔で互いに平行な多数の矩形状突起631a,630bを互いに向き合うようにそれぞれの内側面から突設している。第1及び第2の搬送体630a,630bは、駆動部640の駆動によって被搬送体620の搬送方向と平行な方向に所定の振幅だけ同方向に往復移動する。また、第1及び第2の搬送体630a,630bは、駆動部640の駆動によって被搬送体620の搬送方向と直交する方向であって互いに逆方向に、所定の振幅だけ往復移動する。すなわち、第1の搬送体630aが外側(図中左側)に移動するとき、第2の搬送体630bは外側(図中右側)に移動し、第1の搬送体630aが内側(図中右側)に移動するとき、第2の搬送体630bは内側(図中左側)に移動する。このような第1及び第2の駆動体630a,630bの往復移動をもたらす駆動部640は、各往復移動に対応して1つずつ設けられた、静電マイクロアクチュエータ、圧電マイクロアクチュエータ等の数μm程度の振幅を有するリニア往復運動するマイクロアクチュエータからなる。また、静電マイクロモータの回転運動をリニア往復運動に変換してもよい。なお、第1及び第2の搬送体630a,630bの搬送方向と平行な方向への往復運動、第1及び第2の搬送体630a,630bの搬送方向に直交する方向への往復運動に、それぞれに対応するマイクロアクチュエータを計2つ設けてもよいし、第1の搬送体630aの各方向への往復運動、第2の搬送体630bの各方向への往復運動に、それぞれに対応するマイクロアクチュエータを計4つ設けてもよい。
【0059】
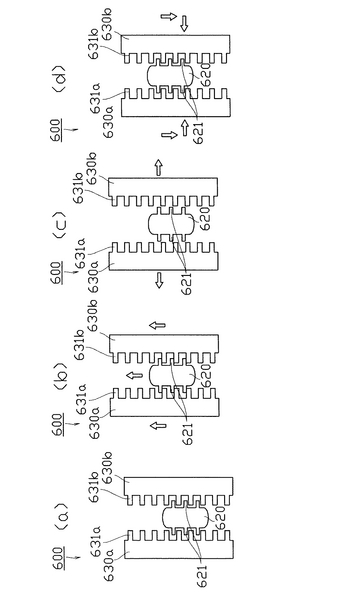
この直進搬送機構600の搬送動作について図面に基づき説明する。図26(a)に示すように、被搬送体620は、第1及び第2の搬送体630a,630bとの間に挟まれて位置している。この状態から、図26(b)に示すように、第1及び第2の搬送体630a,630bが搬送方向に協動して移動する。このとき、被搬送体の矩形状突起621と第1及び第2の搬送体の矩形状突起631とが係合し、被搬送体620は第1及び第2の搬送体630a,630bの移動に伴って搬送方向に移動する。次に、図26(c)に示すように、第1及び第2の搬送体630a,630bがそれぞれ外側に移動する。このとき、被搬送体の矩形状突起621と第1及び第2の搬送体の矩形状突起631a,631bとによる係合が解除される。次に、図26(d)に示すように、第1及び第2の搬送体630a,630bがそれぞれ搬送方向と反対方向に移動した後、第1及び第2の搬送体630a,630bがそれぞれ内側に移動する。このように、第1及び第2の搬送体630a,630bの2方向への往復移動が繰り返されることによって、被搬送体620は搬送方向に連続的に直進搬送される。
【0060】
被搬送体及び搬送体の矩形状突起621,631は、搬送体630が搬送方向に移動する際に被搬送体620が搬送体630と係合し共に移動するように、また、搬送体630が外側に移動する際に被搬送体620と搬送体630との係合が解除するように設けられたものであり、その形状は限定されない。例えば、搬送体の矩形状突起631を、図27(a)に示すように、先端部がテーパ状になった突起632としてもよい。これにより、搬送体630が内側に移動し被搬送体620と再び係合する際に、その係合をより確実に行うことができる。また、図27(b)に示すように、搬送体630の内側面に多数の三角突起633を設けてもよい。また、図27(c)に示すように、被搬送体及び搬送体にそれぞれ鋸歯625,635を設けてもよい。これらにより、搬送体630が内側に移動し被搬送体620と再び係合する際に、その係合をより確実に行うことができる。
【0061】
以下、掃出し機構を用いた回転搬送機構700について図面に基づき説明する。この回転搬送機構700は、図28(a)に示すように、矩形状突起721を設けた被搬送体720と、該被搬送体の矩形状突起721(721a及び721b)と係合する矩形状突起731(731a及び731b)を設けた搬送体730(730a及び730b)と、搬送体730を駆動により往復回動及び往復上下動させる駆動部(不図示)、駆動部の駆動を制御する制御部(不図示)を備え、駆動部を駆動することによって搬送体730を介して被搬送体720を左回りの搬送方向に連続的に回転搬送するものである。
【0062】
被搬送体720は、互いに略平行な矩形状突起721a,721bを両側面から外側に向かって突設しており、中心Oを中心として左回りの搬送方向に搬送されるものである。搬送体730は、中心Oを中心とする所定の円弧からなるその側面の間に被搬送体720を挟み互いに対向して位置する第1の搬送体730aと第2の搬送体730bとからなり、第1及び第2の搬送体730a,730とによって、その間に挟まれた被搬送体720が搬送される搬送路を構成している。第1の搬送体730aは、被搬送体720の内側面の矩形状突起721aがその間に位置することが可能な間隔で中心Oから外側に向かう多数の矩形状突起731aを円弧からなる外側面に突設している。第2の搬送体730bは、被搬送体720の外側面の矩形状突起721bがその間に位置することが可能な間隔で中心Oへ内側に向かう多数の矩形状突起731bを円弧からなる内側面に突設している。ここで、内側とは中心Oに近い側を、外側とは中心Oから離れた側を意味している。第1及び第2の搬送体730a,730bは、駆動部の駆動によって中心Oを中心に所定の振幅だけ同方向に往復運動する。すなわち、第1の搬送体730aが左回りに回転するとき、第2の搬送体730bも左回りに回転し、第1の搬送体730aが右回りに回転するとき、第2の搬送体730bは右回りに回転する。また、第1及び第2の搬送体730a,730bは、駆動部の駆動によって上下方向に、すなわち第1及び第2の搬送体の矩形状突起731a,731bが中心Oに対して近づき離れる方向であって互いに逆方向に所定の振幅だけ往復運動する。駆動部は、静電マイクロアクチュエータ、圧電マイクロアクチュエータ等の数度の振幅をもった往復回動するマイクロアクチュエータである。また、静電マイクロモータの回転運動を往復回動に変換してもよい。搬送体の矩形状突起731の間隔は、搬送体730の振幅未満である。なお、図示しないが、他の態様も適用することができる。
【0063】
この回転搬送機構700の搬送動作について図面に基づき説明する。図28(a)に示す状態から、図28(b)に示すように、第1及び第2の搬送体730a,730bが左回りに協動して回転する。このとき、被搬送体の矩形状突起721a,721bと第1及び第2の搬送体の矩形状突起731a,731bとが係合し、被搬送体720は第1及び第2の搬送体730a,730bの回転に伴って左回りに回転する。次に、図28(c)に示すように、第1の搬送体730aが下方向に移動し、第2の搬送体730bが上方向に移動する。このとき、被搬送体の矩形状突起721a,721bと第1及び第2の搬送体の矩形状突起731a,731bとの係合が解除される。次に、図28(d)に示すように、第1及び第2の搬送体730a,730bが右回りに回転した後、第1の搬送体730aが上側に移動し、第2の搬送体730bが下側に移動し、被搬送体の矩形状突起721a,721bと第1及び第2の搬送体の矩形状突起731a,731bとが再び係合する。このように、第1及び第2の搬送体730a,730bの2方向への往復運動が繰り返されることによって、被搬送体720は左回りに連続的に回転搬送される。なお、右回りに設計した場合には、被搬送体320を右回りに連続的に回転搬送することも可能である。
【0064】
以下、掃出し機構を用いた複合搬送機構750について図面に基づき説明する。この複合搬送機構は、図29に示すように、図25に示した直進搬送機構600、図28に示した回転搬送機構700、及び分岐搬送機構760等を適宜組み合わせることにより、所望の搬送路を構成したものである。このように、所定の搬送機構を組み合わせることにより搬送路を構成することができるので、搬送路の構築や変更を容易に行うことができる。また、各搬送機構の搬送体は、それぞれ独立に制御部(不図示)によって制御するので、同一の搬送路に同時に複数の被搬送体を搬送してもよい。ここで、分岐搬送機構760は、直進搬送機構600によって搬送された被搬送体を、左回りに回転搬送する左回り回転搬送機構761と右回りに回転搬送する右左回り回転搬送機構762とを組み合わせ配置することによって、搬送方向を選択して搬送するものである。図示しない制御部は、作業者の指示等によって、左回り回転搬送機構761及び右回り回転搬送機構762の何れか一方を動作させる。例えば、左回り回転搬送機構761を動作させた場合には、被搬送体は左回り回転搬送機構761を構成する搬送体に係合されることによって左回りに搬送される。
【0065】
以下、掃出し機構を用いた搬送機構において、駆動部に櫛歯型静電マイクロアクチュエータを用いた実施例について図面に基づき説明する。この櫛歯型静電マイクロアクチュエータを用いた直線搬送機構800は、図30に示すように、矩形状突起821を設けた被搬送体820と、該被搬送体820の矩形状突起821と係合する矩形状突起831を設け、棒状突起832と屈曲凹部833が形成された搬送体830と、棒状突起832の側面と接する突起841を備えた枠に固設された第1の可動電極840と、該第1の可動電極840に対応して設けられた第1の固定電極850と、屈曲凹部833に嵌設された屈曲端部861を端部に固設する第2の可動電極860と、該第2の可動電極860に対応して設けられた固定電極870と、各電極840,850,860,870の電圧を制御する制御部(不図示)とを備え、搬送体830を介して被搬送体820を搬送方向に連続的に直進搬送するものである。なお、図示しないが、他の態様も適用することができる。
【0066】
被搬送体820は、互いに平行な矩形状突起821を両側面から外側に向かって突設している。2つの搬送体830は、被搬送体820を挟み互いに対向して位置し、その間に挟まれた被搬送体820が搬送される搬送路を構成している。搬送体830は、被搬送体820の矩形状突起821がその間に位置することが可能な間隔で互いに平行な多数の矩形状突起831をそれぞれの内側面から内側に向かって突設している。被搬送体及び搬送体の矩形状突起821,831の間隔は数μm程度である。搬送体830は、その外側面の中央部付近から外側に向かって延びる棒状突起832を、その上下端部付近に外側面に開口を有する屈曲凹部831に設けている。棒状突起832の側面と接する突起841を備えた枠に櫛歯状の第1の可動電極840が固設され、該第1の可動電極840は搬送方向に延びる多数の櫛歯を備えている。第1の固定電極850は、第1の可動電極840の櫛歯に対応させた搬送方向に延びる多数の櫛歯を備えている。屈曲凹部833に嵌設された屈曲端部861を端部に有する棒状部材の他端に第2の可動電極860が固設され、該第2の可動電極860は搬送方向に直交する方向に延びる多数の櫛歯を備えている。第2の固定電極870は、第2の可動電極860の櫛歯に対応させた搬送方向に直交する方向に延びる多数の櫛歯を備えた櫛歯状の固定された電極である。これら各電極840,850,860,870は電源(不図示)に接続され、正負の電圧が印加される。第1及び第2の固定電極850,870に対する第1及び第2の可動電極840,860の相対変位量は数μm程度であり、被搬送体及び搬送体の矩形状突起821,831の間隔よりも大きい。また、第1の可動電極840を固設する枠がばね等の弾性体880によって固定柱881に、搬送体830の棒状突起832がばね等の弾性体882によって固定柱883に、それぞれ連結されている。第1の可動電極840の移動により、第1の可動電極840が固設された枠に設けられた突起841に棒状突起832が押されることに伴って、搬送方向に搬送体830が移動する。このとき、搬送体830は、搬送方向と平行な方向に屈曲凹部833の両側面と屈曲端部861の両側面とが接しており、搬送体430を搬送方向に確実に移動することができる。第2の可動電極860の移動により、第2の可動電極860が固設された屈曲端部861とともに屈曲凹部833が外側に移動することに伴って、搬送体830が搬送方向と直交する方向に移動する。
【0067】
この直線搬送機構800の搬送動作について図面に基づき説明する。図31(a)から図31(d)においては、弾性体880,882及び固定柱881,883を省略して直線搬送機構800を図示している。図31(a)に示すように、被搬送体820は、2つの搬送体830との間に挟まれて位置しており、各電極840,850,860,870には電圧が印加されていない。次に、例えば、図中下側の第1の可動電極840に正の電圧をそれぞれ印加し、該第1の可動電極840に対応する第1の固定電極850に負の電圧を印加する。これにより、図中下側の突起841が棒状突起832を搬送方向に押し出すことによって、図31(b)に示すように、2つの搬送体830が搬送方向に協動して移動する。このとき、被搬送体の矩形状突起821と搬送体の矩形状突起831とが係合し、被搬送体820は搬送体830の移動に伴って搬送方向に移動する。次に、例えば、第2の可動電極860に正の電圧を印加し、第2の固定電極870に負の電圧を印加する。これにより、屈曲端部861とともに屈曲凹部833が外側に移動することによって、図31(c)に示すように、搬送体830がそれぞれ外側に移動し、被搬送体820と搬送体830との係合が解除される。次に、第1の可動電極840及び第1の固定電極850に印加している電圧を解放する。これにより、弾性体880,882(図30参照)の復元力によって、搬送体830が搬送方向の反対方向に移動する。さらに、第2の可動電極860及び第2の固定電極870に印加している電圧を解放する。これにより、弾性体882の復元力によって、図31(d)に示すように、搬送体830がそれぞれ内側に移動する。このとき、被搬送体820と搬送体830とが再び係合する。このような搬送体830の2方向への往復移動が繰り返されることによって、被搬送体820は搬送方向に連続的に直進搬送される。
【0068】
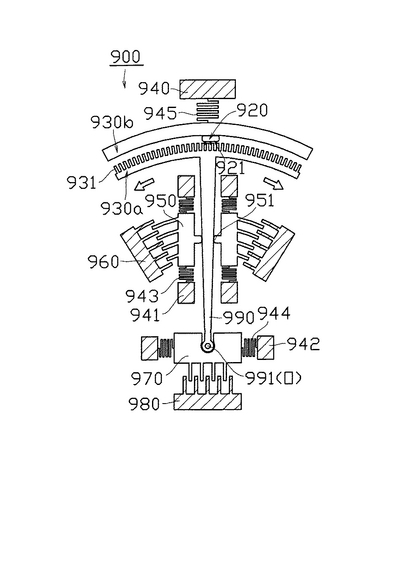
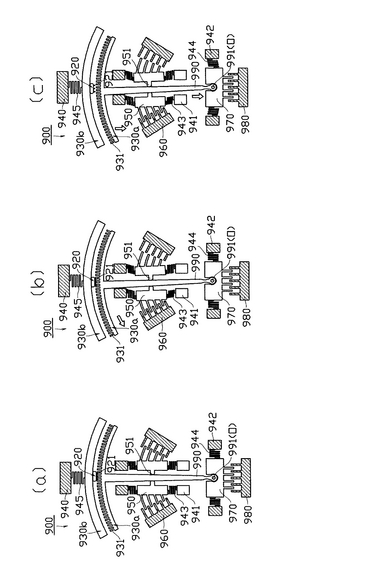
櫛歯型静電マイクロアクチュエータを用いた回転搬送機構900は、図32に示すように、矩形状突起921を設けた被搬送体920と、該被搬送体920の矩形状突起921と係合する矩形状突起931を設け、可動中心Oに対して回動可能な第1の搬送体930aと、固定柱940に弾性連結された第2の搬送体930bと、固定柱941に弾性連結された第1の可動電極950と、該第1の可動電極950に対応して設けられた第1の固定電極960と、固定柱942に弾性連結された第2の可動電極970と、該第2の可動電極970に対応して設けられた第2の固定電極980と、各電極950,960,970,980の電圧を制御する制御部(不図示)を備え、第1及び第2の搬送体930a,930bを介して被搬送体920を左回り方向の搬送方向に連続的に回転搬送するものである。
【0069】
被搬送体920は、互いに略平行な矩形状突起921を内側の側面に突設しており、中心Oを中心として左回りの搬送方向に搬送されるものである。第1及び第2の搬送体930a,930bは、中心Oを中心とする所定の円弧からなるそれぞれの側面によって被搬送体920を挟み互いに対向して位置し、その間に挟まれる被搬送体920が搬送される搬送路を構成する。第1の搬送体930aは、被搬送体920の内側の側面の矩形状突起921がその間に位置することが可能な間隔で中心Oから外側に向かう多数の矩形状突起931を円弧からなる外周面に突設している。第2の搬送体930bは、被搬送体920の外側の側面と接する円弧からなる内周面を備えている。ここで、内側とは中心Oに近い側を、外側とは中心Oから離れた側を意味している。被搬送体920及び第1の搬送体930aの矩形状突起921,931の間隔は数μm程度である。第1の搬送体930aは、可動中心Oを中心として回動可能な回動棒990に固設されている。第1の可動電極950は、中心Oを中心とした円弧状に伸びる多数の櫛歯を備えるともに、回動棒990にその弧状先端が接触する回動規制部951を一体に設けている。回動棒990は、回動規制部951の弧状先端によって挟み込まれることによって、可動中心Oを中心とする回動が規制される。なお、図示しない部材によって、回動棒990を中心として対称に位置する2つの回動規制部951は一体に設けられている。第1の固定電極960は、第1の可動電極950の櫛歯に対応させた中心Oを中心とした円弧状に伸びる多数の櫛歯を備えた櫛歯状の固定された電極である。第2の可動電極970は、上下方向に伸びる多数の櫛歯を備えるとともに、回動棒990の回動中心となる中心Oに可動中心軸991を一体に設けている。第2の固定電極980は、第2の可動電極970の櫛歯に対応させた上下方向に伸びる多数の櫛歯を備えた櫛歯状の固定された電極である。これら各電極950,960,970,980は電源(不図示)に接続され、正負の電圧が印加される。第1及び第2の固定電極960,980に対する第1及び第2の可動電極950,970の相対変位量は数μm程度であり、被搬送体及び搬送体の矩形状突起921,931の間隔よりも大きい。第1の可動電極950の移動により、第1の可動電極950に設けられた回動規制部951の弧状先端によって挟み込まれた回動棒990が可動中心軸971を中心に回転する。第2の可動電極970の移動により、第2の可動電極970と一体の可動中心軸991が移動するとともに、この可動中心軸991を回動中心とする回動棒990が第1の搬送体930aとともに移動する。また、第1の可動電極950は、弾性変形するばね等の弾性体943によって固定柱941に連結されている。第2の可動電極970は、弾性変形するばね等の弾性体944によって固定柱942に連結されている。さらに、第2の搬送体930bは、弾性変形するばね等の弾性体945(逃し部、図3(b)参照。)によって、固定柱940に連結されている。これにより、被搬送体の矩形状突起921と第1の搬送体の矩形状突起931とが係合し、被搬送体920が第1の搬送体930aとともに移動するので、被搬送体920を搬送方向に向かって滑らかに搬送することができる。
【0070】
この回転搬送機構900の搬送動作について図面に基づき説明する。図33(a)に示すように、被搬送体920は、第1及び第2の搬送体930a,930bとの間に挟まれて位置しており、各電極950,960,970,980に電圧が印加されていない。次に、例えば、第1の可動電極950に正の電圧を印加し、図中左側の第1の可動電極950に対応する第1の固定電極960に負の電圧を印加する。これにより、図33(b)に示すように、第1の搬送体930aが可動中心軸991を中心に左回りに回転する。このとき、被搬送体920の矩形状突起921aと第1の搬送体930aの矩形状突起931とが係合するので、被搬送体920は第1の搬送体930aの回転に伴って左回りに移動する。次に、例えば、第2の可動電極970に正の電圧を印加し、第2の固定電極980に負の電圧を印加する。これにより、図33(c)に示すように、第1の搬送体930aが可動中心軸991とともに図中下方向に移動し、被搬送体920と第1の搬送体930aとの係合が解除される。次に、第1の可動電極950及び第1の固定電極960に印加している電圧を解放する。これにより、弾性体943の復元力によって、第1の搬送体930aが可動中心軸991を中心に右回りに回転する。その後、第2の可動電極970及び第2の固定電極980に印加している電圧を解放する。これにより、弾性体944の復元力によって、可動中心軸991が第2の可動電極970とともに図中上側に移動し、被搬送体920と第1の搬送体930とが再び係合する。このような第1の搬送体930aの2方向への往復運動が繰り返されることによって、被搬送体920は左回りに連続的に回転搬送される。なお、右回りに設計した場合には、被搬送体920を右回りに連続的に回転搬送することも可能である。
【0071】
このような櫛歯型静電マイクロアクチュエータを用いた各種の搬送機構から構成された複合搬送機構を、図20に示した微小化学分析システムと同様に、微小化学分析システムに適用することができる。
【0072】
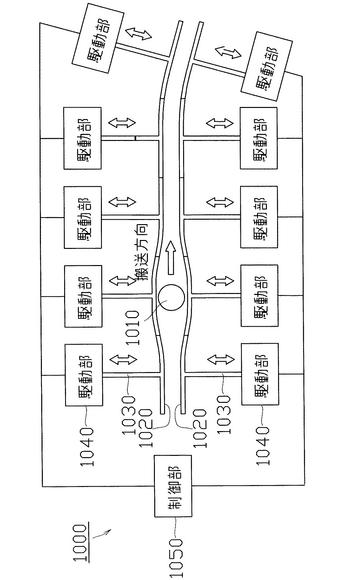
以下、本発明の第3の実施の形態に係る脈動機構を用いた搬送機構について図面に基づき説明する。この搬送機構1000は、図34に示すように、外周面が滑らかな被搬送体1010と、該被搬送体1010の外周面と接触する壁面1020を設け被搬送体1010の搬送方向に連接した複数の搬送体1030と、被搬送体1010の搬送方向と直交する方向に搬送体1030を駆動により往復移動させる駆動部1040、該駆動部1040の駆動を制御する制御部1050を備え、駆動部1040を駆動することによって被搬送体1030を脈動させて被搬送体1010を搬送方向に連続的に搬送するものである。
【0073】
被搬送体1010は、その上面視が円形や楕円形である滑らかな外周面を備えるものであり、例えば、球形や卵形である。2つの搬送体1030は、被搬送体を挟んで互いに対向して位置し、これら2つの搬送体1030が被搬送体1010の搬送方向に連接しており、これらの搬送体1030によって、その間に挟まれた被搬送体1010が搬送される搬送路が規定されている。搬送体1030は、被搬送体1020の外周面と接触する壁面1020を備え、その中央部付近に駆動部1040が連結され、その端部部分は、連接する搬送体1030の壁面1020の端部と連結されており、変形可能な弾性体からなっている。搬送体1030は、駆動部1040の駆動によって被搬送体1010の搬送方向と直交する方向にその中央部付近が所定の振幅だけ往復運動する。対向して位置する2つの搬送体1030は、駆動部1040の駆動によって被搬送体1010の搬送方向と直交する方向であって互いに逆方向に、所定の振幅だけ往復運動する。すなわち、対向して位置する2つの搬送体1030は、駆動部1040の駆動によって搬送路に向かって内側にともに移動、もしくは搬送路から向かって外側にともに移動する。隣接する搬送体1030は、独立に移動する。このような駆動体1030の往復運動をもたらす駆動部1040としては、静電マイクロアクチュエータ、圧電マイクロアクチュエータ等の数μm程度の振幅をもったリニア往復運動するマイクロアクチュエータを各往復運動に対応して1つずつ設けている。また、静電マイクロモータの回転運動をリニア往復運動に変換してもよい。なお、対向して位置する2つの搬送体1030の往復運動を1つのマイクロアクチュエータにより駆動してもよい。
【0074】
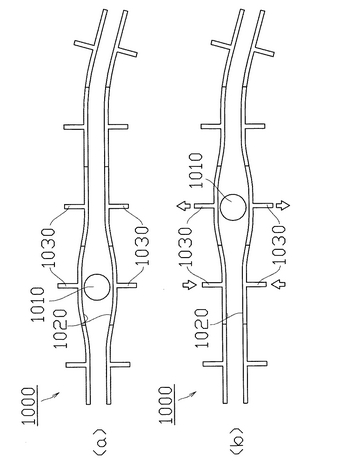
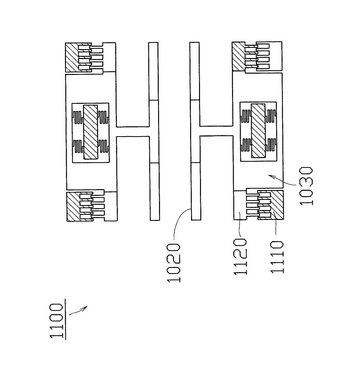
この搬送機構1000の搬送動作について図面に基づき説明する。図35(a)に示すように、その間に被搬送体1010を挟む2つの搬送体1030は、搬送路から向かって外側に移動した状態である。他の搬送体1030は、その間に被搬送体1010が位置することができない状態である。この状態から、図35(b)に示すように、その間に被搬送体1010を挟んでいた2つの搬送体1030が搬送路に向かって内側に移動するともに、搬送方向に隣接する2つの搬送体1030が搬送路から向かって外側に移動する。このとき、被搬送体1010は、挟まれていた搬送体1030から押出され、搬送方向に位置する搬送体1030間に生じた空間に向かって移動する。このように、搬送路が脈動するように搬送体1030の往復運動が連動して行われることによって、被搬送体1010は搬送方向に連続的に搬送される。搬送体1030の配置により、曲線を含めた自在な搬送路を構成することができる。駆動部に櫛歯型静電マイクロアクチュエータを用いた搬送機構1100は、図36に示すように、固定電極1110に対応して設けられた可動電極1120とともに搬送体1030の中央部付近が移動する。
【0075】
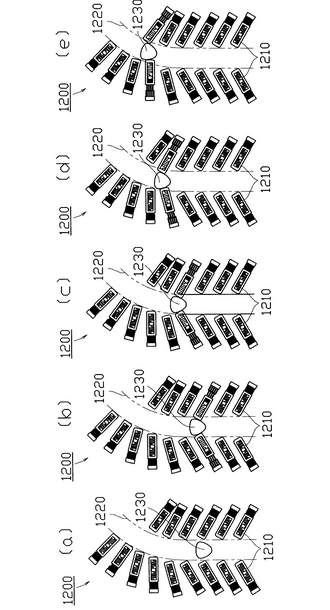
本発明の第4の実施の形態に係る搬送機構1200は、図37に示すピストン型のマイクロアクチュエータ1210を、図38に示すように、搬送路1220に沿って複数配列したものである。このピストン型のマイクロアクチュエータ1210は、滑らかな先端形状1211を有し固定柱1212に弾性連結された搬送体1213と、平行な多数の櫛歯を備え搬送体1213に固設された櫛歯状の可動電極1214と、該可動電極1214の櫛歯に対応させた多数の櫛歯を備えた固定電極1215と、各電極1214,1215の電圧を制御する制御部(不図示)を備え、各電極1214,1215の電圧の印加の有無により搬送体1213が線形往復移動するものである。複数のピストン型のマイクロアクチュエータ1210は、図38(a)から図38(e)に示すように、搬送路1220に沿って配列されており、制御部の制御によって、その先端付近に搬送されてきた被搬送体1230を搬送方向に連携して押出し、被搬送体1230を搬送する。
【0076】
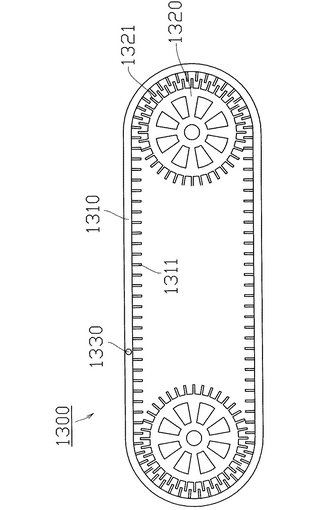
本発明の第5の実施の形態に係る搬送機構1300は、図39に示すように、ベルト状の搬送体1310を静電マイクロモータ1320によって周回移動させることにより、搬送体1310に載置された被搬送体1330を搬送するものである。ベルト状の搬送体1310は、2つの静電マイクロモータ1320に掛け渡され、搬送体1310の内側面から内側に向かって設けられた矩形状突起1311と静電マイクロモータ1320の外側面から外側に向かって設けられた矩形状突起1321とが係合することにより、静電マイクロモータ1320の回転に伴って周回移動する。これにより、搬送体1310に載置された被搬送体1330は、搬送体1310が形成する所定の周回搬送経路に沿って搬送される。
【0077】
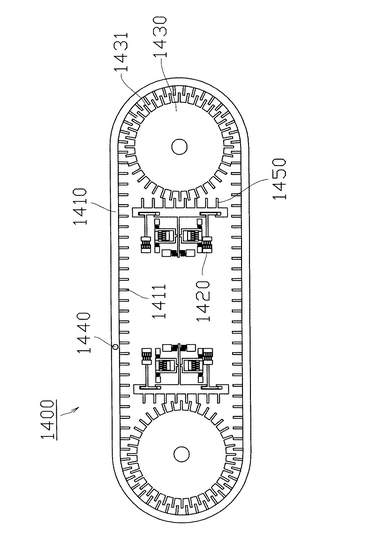
本発明の第6の実施の形態に係る搬送機構1400は、図40に示すように、ベルト状の搬送体1410を静電マイクロアクチュエータ1420の駆動によって回転する回転体1430を回転させることにより、搬送体1410に載置された被搬送体1440を搬送するものである。ベルト状の搬送体1410は、2つの回転体1430に掛け渡され、搬送体1410の内側面から内側に向かって設けられた矩形状突起1411と回転体1430の外側面から外側に向かって設けられた矩形状突起1431とが係合することにより、回転体1430の回転に伴って周回移動する。回転体1430は、その矩形状突起1431と係合する他の矩形状突起1450が静電マイクロアクチュエータ1420(図30の800を参照。)の駆動による掃出し動作によって、回転する。これにより、搬送体1410に載置された被搬送体1440は、搬送体1410が形成する所定の周回搬送経路に沿って搬送される。
【0078】
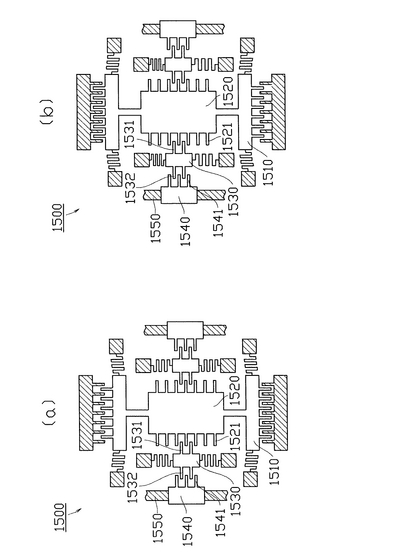
本発明の第7の実施の形態に係る搬送機構は、櫛歯型静電マイクロアクチュエータと並行平板型静電マイクロアクチュエータとを組み合わせて駆動することにより、被搬送体を搬送するものである。この搬送機構1500は、図41(a)に示す状態から、櫛歯型静電マイクロアクチュエータの可動電極1510が電圧の印加の有無によって図中の上下方向に移動すると、可動電極1510に固設された中間体1520が上下方向に移動する。中間体1520が上下方向の移動すると、この中間体1520の両側面に設けられた矩形状突起1521と係合する矩形状突起1531を側面に設けた搬送体1530が上下方向に移動する。この搬送体1530は、並行平板型静電マイクロアクチュエータの可動電極でもあり、この可動電極に対応して図示しない固定電極が設けられている。これらの電極に電圧が印加されていない状態で、図41(b)に示すように、搬送体1530の他の側面に設けられた矩形状突起1532と係合する矩形状突起1541を側面に設けた被搬送体1540が、規定されたレール1550上を上下方向に移動する。その後、並行平板型静電マイクロアクチュエータの各電極に電圧を印加し、並行平板型静電マイクロアクチュエータの可動電極、すなわち搬送体1530が図中紙面に直交する方向に移動することにより、被搬送体1540と搬送体1530との係合、及び搬送体1530と中間体1520との係合が解除される。このように、被搬送体1540は、レール1550上を図中上下方向の搬送方向に連続して搬送される。
【図面の簡単な説明】
【0079】
【図1】本発明に係る搬送機構を示す構成図である。
【図2】本発明の第1の実施の形態に係るラチェット機構を用いた直線搬送機構を示す構成図である。
【図3】(a)及び(b)は、ラチェット機構を用いた直線搬送機構に係る逃し部の形態をそれぞれ示す図である。
【図4】(a)及び(b)は、ラチェット機構を用いた直線搬送機構に係る逃し部の形態をそれぞれ示す図である。
【図5】(a)から(c)は、図2に示した直線搬送機構の搬送動作を説明する図である。
【図6】(a)から(c)は、ラチェット機構を用いた別の直線搬送機構の搬送動作を説明する図である。
【図7】(a)から(c)は、図2に示した搬送体を搬送方向に連続して設けた直線搬送機構の搬送動作を説明する図である。
【図8】(a)及び(b)は、搬送体を搬送方向に連続して設けたそれぞれ別の直線搬送機構の搬送動作を説明する図である。
【図9】(a)から(c)は、本発明の第1の実施の形態に係るラチェット機構を用いた回転搬送機構の搬送動作を説明する図である。
【図10】(a)から(c)は、本発明の第1の実施の形態に係るラチェット機構を用いた分岐搬送機構の搬送動作を説明する図である。
【図11】ラチェット機構を用いた複合搬送機構を説明する図である。
【図12】ラチェット機構において、駆動部に櫛歯型静電マイクロアクチュエータを用いた直線搬送機構を説明する図である。
【図13】(a)から(c)は、図12に示した直線搬送機構の搬送動作を説明する図である。
【図14】(a)及び(b)は、ラチェット機構において、駆動部に櫛歯型静電マイクロアクチュエータを用いた回転搬送機構を説明する図である。
【図15】(a)及び(b)は、本発明の第1の実施の形態に係るラチェット機構において、駆動部に櫛歯型静電マイクロアクチュエータを用いた別の回転搬送機構をそれぞれ説明する図である。
【図16】(a)及び(b)は、ラチェット機構において、駆動部に櫛歯型静電マイクロアクチュエータを用いたさらに別の回転搬送機構をそれぞれ説明する図である。
【図17】ラチェット機構において、駆動部に櫛歯型静電マイクロアクチュエータを用いたさらに別の回転搬送機構を説明する図である。
【図18】ラチェット機構において、駆動部に櫛歯型静電マイクロアクチュエータを用いたさらに別の回転搬送機構を説明する図である。
【図19】(a)及び(b)は、本発明の第1の実施の形態に係るラチェット機構において、駆動部に櫛歯型静電マイクロアクチュエータを用いた分岐搬送機構の搬送動作を説明する図である。
【図20】ラチェット機構において、駆動部に櫛歯型静電マイクロアクチュエータを用いた複合搬送機構を適用した微小化学分析システムの実施例を示す図である。
【図21】図20における試料搬送車を示す図である。
【図22】(a)及び(b)は、試料搬送車の変形例をそれぞれ示す図である。
【図23】(a)及び(b)は、試料搬送車を連結した例をそれぞれ示す図である。
【図24】試料搬送車を連接した例を示す図である。
【図25】本発明の第2の実施の形態に係る掃出し機構を用いた直線搬送機構を示す構成図である。
【図26】(a)から(d)は、図25に示した直線搬送機構の搬送動作を説明する説明図である。
【図27】(a)から(c)は、掃出し機構を用いた別の直線搬送機構を示す図である
【図28】(a)から(d)は、本発明の第1の実施の形態に係る掃出し機構を用いた回転搬送機構の搬送動作を説明する図である。
【図29】掃出し機構を用いた複合搬送機構を説明する図である。
【図30】掃出し機構において、駆動部に櫛歯型静電マイクロアクチュエータを用いた直線搬送機構を説明する図である。
【図31】(a)から(d)は、図30に示した直線搬送機構の搬送動作を説明する説明図である。
【図32】掃出し機構において、駆動部に櫛歯型静電マイクロアクチュエータを用いた回転搬送機構を説明する図である。
【図33】(a)から(c)は、図32に示した回転搬送機構の搬送動作を説明する図である。
【図34】本発明の第3の実施の形態に係る脈動機構を用いた搬送機構を示す構成図である。
【図35】(a)及び(b)は、図34に示した搬送機構の搬送動作を説明する図である。
【図36】脈動機構において、駆動部に櫛歯型静電マイクロアクチュエータを用いた搬送機構を説明する図である。
【図37】本発明の第4の実施の形態に係る搬送機構に用いるピストン型のマイクロアクチュエータを説明する図である。
【図38】図37に示したピストン型のマイクロアクチュエータを用いた搬送機構を説明する図である。
【図39】本発明の第5の実施の形態に係る搬送機構を説明する図である。
【図40】本発明の第6の実施の形態に係る搬送機構を説明する図である。
【図41】本発明の第7の実施の形態に係る搬送機構を説明する図である。
【符号の説明】
【0080】
1、530、1000、1100、1200、1300、1400、1500 搬送機構
2、20、120、220、320、372、382、410、620、720、820、920、1010、1213、1330、1440、1540 被搬送体
3 搬送路
4、30、130、230、330、373、375、385、630、730、830、930、1030、1310、1410、1530 搬送体
5、40、640、1040 駆動部
6、50、650、1050 制御部
10、10´、60、200、600、800 直線搬送機構(搬送機構)
21、31、121、131、221、231、321、371、376、381、383 鋸歯
100、300、370、380、700、900 回転搬送機構(搬送機構)
140、400、760 分岐搬送機構(搬送機構)
160、750 複合搬送機構(搬送機構)
500 微小化学分析システム
510、510´ 、540試料搬送車(被搬送体)
530a 直線搬送ブロック
530b 分岐搬送ブロック(分岐路を有するブロック)
530c 曲線搬送ブロック
621、631、721、731、821、831、921,931、1311、1321、1521、1531、1541 矩形状突起(突起)
1020 壁面
【技術分野】
【0001】
本発明は、搬送機構、詳しくはマイクロアクチュエータを用いて微小な被搬送体を搬送する搬送機構、及びこれを用いて試料等が搬送される微小化学分析システムに関するものである。
【背景技術】
【0002】
半導体微細加工技術を用いて機械素子などの製作を行うマイクロマシン技術は様々な分野への応用が進展している。医療や環境測定の分野においては、超小型のポンプ、バルブ、センサなどを集積化した微小化学分析システム(μTAS:Micro Total Analysis System)が最近盛んに研究がなされている。この微小化学分析システムは、化学分析システムの各要素をマイクロマシン技術により小型化し、基板上に集積することにより、システムの小型化、低価格化を可能とするとともに、分析に必要なサンプルや試薬の量や分析により生じる廃液の量を大幅に低減することができる。
【0003】
微小化学分析システムを構成する主要な要素の1つとして搬送機構がある。この搬送機構は、分析に必要な試料、試薬を搬入口から導入して所定の分析、計測、混合、反応、分離部、検出等の各部位に搬送し、その後の廃液を排出口まで搬送するものであり、ポンプ、バルブ、流路(チャネル)等からなっている。例えば、特許文献1には、圧電素子を用いて液体を精度よく微小量噴出する液体ディスペンサが、特許文献2には、流体分析に適した微細な流体搬送構造がそれぞれ開示されている。
【特許文献1】特開2001−234868号公報
【特許文献2】特開2002−243748号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、従来の微小化学分析システムを構成する搬送機構においては、試料を流路に流して搬送していたので、分析に最小限必要な量を超える量の試料を必要とし、1回の分析に余分な量の試料を必要とする問題があった。特に生化学分野では必要とする試料の量は少ない方が望ましく、また、一定量の試料がないため分析できないこともあった。さらに、廃液の量も多くなる問題があった。また、流路等に試料が付着するため、新たな試料の分析を行い再利用するためには、流路等を洗浄する必要があり、1回の使用のみで使い捨てる場合には、コスト的に割高なものとなるとともに、対環境性に問題があった。また、固体試料や粘性の高い試料を搬送する機構は、開発されておらず、これらの試料を用いた分析ができないという問題があった。
【0005】
本発明は、かかる問題を解決すべくなされたものであり、従来のような試料を「流す」必要をなくして、微小固体や液滴を搬送することができる搬送機構、及びこの搬送機構を用いた微小化学分析システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、請求項1に記載の搬送機構は、所定の搬送方向に搬送される被搬送体と、前記搬送方向に移動するときは前記被搬送体と係合し、前記搬送方向と反対方向に移動するときは前記被搬送体との係合が解除される搬送体と、駆動により前記搬送方向及びその反対方向に前記搬送体を往復移動させる駆動部を備えることを特徴としている。
【0007】
請求項2に記載の搬送機構は、所定の搬送方向に搬送され、鋸歯を設けた被搬送体と、
前記搬送方向に移動するときは前記被搬送体の鋸歯と係合し、前記搬送方向と反対方向に移動するときは前記被搬送体の鋸歯と滑り合う鋸歯を設けた搬送体と、駆動により前記搬送方向及びその反対方向に前記搬送体を往復移動させる駆動部を備えることを特徴としている。
【0008】
請求項3に記載の搬送機構は、所定の搬送方向に搬送される被搬送体と、前記搬送方向に移動するときは前記被搬送体と係合し、前記搬送方向と反対方向に移動するときは前記被搬送体から離れる方向に移動することにより前記被搬送体との係合を解除する搬送体と、駆動により前記搬送方向及びその反対方向に前記搬送体を往復移動させる駆動部を備えることを特徴としている。
【0009】
請求項4に記載の搬送機構は、請求項1から3の何れか1項に記載の搬送機構において、前記搬送体を、前記被搬送体が搬送される搬送路に沿って連続して設けたことを特徴としている。
【0010】
請求項5に記載の搬送機構は、所定の搬送方向に搬送される被搬送体と、前記被搬送体がその間を搬送される対向する壁面を備え、前記搬送方向に連続して設けられた複数の搬送体と、駆動により、前記壁面の間の距離が前記被搬送体の幅を超える位置、及び前記壁面の間の距離が前記被搬送体の幅以下となる位置に前記壁面が位置するように、前記搬送体を往復移動させる駆動部を備えることを特徴としている。
【0011】
請求項6に記載の搬送機構は、請求項1から5の何れか1項に記載の搬送機構において、前記被搬送体が搬送される方向に分岐路を設け、前記分岐路の入り口に壁面の間の距離を制御する部材を設け、前記制御部材の位置を変えることにより、前記搬送体の幅を超える幅の分岐路に前記搬送体を移動させるように構成したことを特徴としている。
【0012】
請求項7に記載の搬送機構は、前記分岐路を有するブロックと、前記搬送方向を一定として前記被搬送体が搬送されるように、請求項1から5の何れか1項に記載の搬送機構によって構成された直線搬送ブロックと、前記搬送方向を変化させながら前記被搬送体が搬送されるように、請求項1から5の何れか1項に記載の搬送機構によって構成された曲線搬送ブロックのうち、いずれか2以上の前記ブロックを組み合わせて構成したことを特徴としている。
【0013】
請求項8に記載の微小化学分析システムは、液滴又は微小固形物を載置する前記被搬送体を、請求項1から7の何れか1項に記載の搬送機構によって搬送することを特徴としている。
【発明の効果】
【0014】
請求項1に記載の搬送機構によれば、駆動部の駆動により搬送方向及びその反対方向に往復移動する搬送体が、搬送方向に移動するときは被搬送体と係合し、搬送方向と反対方向に移動するときは被搬送体との係合が解除されるので、駆動部が連続して駆動することによって、被搬送体を搬送方向に連続して搬送することができる。
【0015】
請求項2に記載の搬送機構によれば、駆動部の駆動により搬送方向及びその反対方向に往復移動する搬送体が、搬送方向に移動するときは被搬送体の鋸歯と係合し、搬送方向と反対方向に移動するときは被搬送体の鋸歯と滑り合う鋸歯を設けているので、駆動部が連続して駆動することによって、被搬送体を搬送方向に連続して搬送することができるとともに、簡易な構成とすることができる。
【0016】
請求項3に記載の搬送機構によれば、駆動部の駆動により搬送方向及びその反対方向に往復移動する搬送体が、搬送方向に移動するときは被搬送体と係合し、搬送方向と反対方向に移動するときは被搬送体から離れる方向に移動することにより被搬送体との係合を解除するので、駆動部が連続して駆動することによって、簡易な構成で被搬送体を搬送方向に連続して搬送することができるともに、簡易な構成とすることができる。
【0017】
請求項4に記載の搬送機構によれば、搬送体を、被搬送体が搬送される搬送路に沿って連続して設けているので、被搬送体を搬送体間に渡って搬送することができ、搬送距離を長くすることができる。
【0018】
請求項5に記載の搬送機構によれば、駆動部の駆動により、壁面の間の距離が被搬送体の幅を超える位置、及び壁面の間の距離が被搬送体の幅以下となる位置に壁面が位置するように、搬送体が往復移動するので、駆動部の駆動によって、壁面が脈動するように搬送体を移動させることにより、被搬送体を搬送方向に搬送することができる。
【0019】
請求項6に記載の搬送機構によれば、被搬送体が搬送される方向に分岐路を設け、分岐路の入り口に壁面の間の距離を制御する部材を設け、制御部材の位置を変えることにより、搬送体の幅を超える幅の分岐路に搬送体を移動させるように構成したので、被搬送体を所望の分岐路に確実に移動させることができる。
【0020】
請求項7に記載の搬送機構によれば、分岐路を有するブロックと直線搬送ブロックと曲線搬送ブロックを組み合わせて搬送機構を構成しているので、搬送機構の構築や変更を容易に行うことができる。
【0021】
請求項8に記載の微小化学分析システムによれば、液滴又は微小固形物を載置する被搬送体を、前記特徴を備えた搬送機構によって搬送するので、分析に必要な最小量の試料を微小化学分析システムの分析部に搬送することができるとともに、従来の技術ではできなかった固体微小物や液滴の試料を搬送することができる。
【発明を実施するための最良の形態】
【0022】
本発明に係る搬送機構1は、図1に示すように、所定の搬送方向に搬送される被搬送体2と、該被搬送体2と係合する搬送体4と、駆動により搬送体4を前記搬送方向に移動させる駆動部5を備え、駆動部5を駆動することによって搬送体4に係合された被搬送体2を搬送方向に搬送するものである。搬送体4は、被搬送体2が搬送される搬送路3の少なくとも一部を構成する。
【0023】
搬送機構1は、さらに、被搬送体2と搬送体4との係合を解除する係合解除手段を備えている。微小変位往復移動するマイクロアクチュエータ等から駆動部5を構成すると、駆動部5の駆動により搬送体4が往復移動する。例えば、往動時に被搬送体2と係合する搬送体4を搬送方向に移動させ、復動時に被搬送体2との係合を解除させた搬送体4を搬送方向と反対方向への移動し、往動時前の位置に復帰させることによって、被搬送体2を搬送方向へ連続的に搬送することができる。搬送体4が微小変位だけ往復移動するものであっても、この微小変位を積算し被搬送体を大変位搬送することができる。また、搬送機構1は駆動部4の駆動などを制御する制御部6を備えている。
【0024】
本発明の第1の実施の形態に係るラチェット機構を用いた搬送機構について図面に基づき説明する。このラチェット機構を用いた直線搬送機構10は、図2に示すように、鋸歯21を設けた被搬送体20と、該被搬送体の鋸歯21と係合する鋸歯31(31a及び31b)を設けた搬送体30(30a及び30b)と、駆動により前記搬送方向及びその反対方向に搬送体30を往復移動させる駆動部40を備え、駆動部40の駆動により被搬送体20を搬送方向に連続的に直進搬送するものである。
【0025】
被搬送体20は、その中心線を挟んで対称になるように傾斜する鋸歯21を両側面に刻設している。搬送体30は、被搬送体20を挟み互いに対向して位置する第1の搬送体30aと第2の搬送体30bからなり、第1の搬送体30aと第2の搬送体30bとが、その間に挟まれた被搬送体20が搬送される搬送路の一部を構成している。第1及び第2の搬送体30a,30bは、被搬送体20の鋸歯21と係合するように当該鋸歯21の傾斜と反対方向に傾斜する複数の鋸歯31をそれぞれ刻設している。第1及び第2の搬送体30a,30bは、駆動部40の往復移動によって被搬送体20の搬送方向と平行に互いに反対方向に所定の振幅だけ往復移動する。すなわち、第1の搬送体30aが搬送方向に移動するとき、第2の搬送体30bは搬送方向と反対方向に移動し、第1の搬送体30aが搬送方向と反対方向に移動するとき、第2の搬送体30bは搬送方向に移動するように、第1及び第2の搬送体30a,30bの往復移動をもたらす駆動部40を制御部50が制御する。駆動部40は、静電マイクロアクチュエータ、圧電マイクロアクチュエータ等の数μm程度の振幅をもったリニア往復運動するマイクロアクチュエータである。また、静電マイクロモータの回転運動をリニア往復運動に変換してもよい。なお、被搬送体及び搬送体の鋸歯21,31は、図2に示すような片歯の他、爪歯、鉤歯等であってもよく、搬送体30が搬送方向に移動する際には搬送体30に係合された被搬送体20が搬送体30とともに移動し、搬送体30が搬送方向と反対方向に移動する際には被搬送体20の鋸歯21と搬送体30との鋸歯31が滑り合うために被搬送体20と搬送体30とが係合せず、搬送体30の移動によっては被搬送体20が移動しないものであればよい。被搬送体20及び搬送体30の鋸歯21,31の歯間隔は、搬送体30の振幅未満である。
【0026】
ところで、実際には、搬送体30の鋸歯31と被搬送体20との鋸歯21が滑り合うとき、鋸歯21,31の干渉によって搬送方向と直交する方向への相対的な変位が生じるので、この変位を吸収するために、搬送方向と直交する方向に被搬送体又は搬送体の鋸歯21,31を適宜逃すことができるように逃し部を設ける必要がある。例えば、図3(a)に示すように、第1の搬送体の鋸歯31aと係合する第1の鋸歯21aを外側面に刻設した第1の鋸歯部22aと、第2の搬送体の鋸歯31bと係合する第2の鋸歯21bを外側面に設けた第2の鋸歯部22bと、第1及び第2の鋸歯部22a,22bとの間に位置する中央部23と、第1及び第2の鋸歯部22a,22bの内側面と中央部23の両側面とをそれぞれ可動可能に連結するばね部(逃し部)24とを備える被搬送体20とする。ここで、内側面とは被搬送体20の縦中心側の側面を、外側面とは被搬送体20の縦中心軸から近い側の側面を意味する。これにより、被搬送体の鋸歯21と搬送体との鋸歯31が滑り合うとき、鋸歯21,31の干渉に伴って第1又は第2の鋸歯部22a,22bが中央部23に向かって適宜移動するので、被搬送体20を搬送方向に向かって滑らかに搬送することができる。なお、中央部23を設けることなく、第1及び第2の鋸歯部22a,22bを直接ばね部24により連結してもよい。
【0027】
また、図3(b)に示すように、第1及び第2の搬送体30a,30bにそれぞれ固定壁33に対して搬送方向と直交する方向に可動可能に連結するばね部(逃し部)32を設けてもよい。これにより、被搬送体の鋸歯21と搬送体の鋸歯31とが滑り合うとき、鋸歯21,31の干渉に伴って第1又は第2の鋸歯体30a,30bが固定壁33に向かって適宜移動するので、被搬送体20を搬送方向に向かって滑らかに搬送することができる。なお、第1又は第2の搬送体30a,30bの何れかのみを固定壁33にばね部32により連結してもよい。
【0028】
また、図4(a)に示すように、被搬送体20の鋸歯21を可撓性を有する脚(逃し部)25としてもよい。これにより、被搬送体20の脚25と搬送体の鋸歯31とが滑り合うとき、脚25は鋸歯31に沿って適宜撓むので、被搬送体20を搬送方向に向かって滑らかに搬送することができる。
【0029】
また、図4(b)に示すように、第1及び第2の鋸歯部22a,22bと中央部23とをそれぞれ搬送方向とは直交する方向に可動可能とするともに、第1及び第2の鋸歯部21a,22bと中央部23との搬送方向と平行な方向への相対移動を規制する規制部(逃し部)を被搬送体20に設けてもよい。この規制部は、第1及び第2の鋸歯部22a,22bの内側面からそれぞれ中央部23に向かって突出する鋸歯部突起26と、中央部23の両側面から第1及び第2の鋸歯部22a,22bに向かってそれぞれ突出し、前記鋸歯部突起26と係合する中央部突起27とからなる。これにより、被搬送体20の鋸歯21と搬送体30の鋸歯31とが滑り合うとき、鋸歯21,31の干渉に伴って第1又は第2の鋸歯部22a,22bが中央部23に向かって適宜移動するので、被搬送体20を搬送方向に向かって滑らかに搬送することができる。また、第1及び第2の鋸歯部22a,22bが搬送体30と共に移動又は静止するとき、第1及び第2の鋸歯部22a,22bと中央部23とは互いに係合するので、これらは一体化した状態で被搬送体20を構成し続ける。なお、中央部23を設けることなく、第1及び第2の鋸歯部22a,22bを直接突起により連結してもよい。
【0030】
図2に示した直線搬送機構10の搬送動作について図面に基づき説明する。この直線搬送機構10は、図示しないが、図2に示す駆動部40や制御部50、及び図3(a)から図3(d)等に示す逃し部を設けるものである。図5(a)に示すように、被搬送体20は、第1及び第2の搬送体30a,30bとの間に挟まれて位置している。この状態から、図5(b)に示すように、第1の搬送体30aが搬送方向に移動すると同時に第2の搬送体30bが搬送方向と反対方向に移動する。このとき、被搬送体の鋸歯21aと第1の搬送体の鋸歯31aとが係合し、被搬送体の鋸歯21bと第2の搬送体の鋸歯31bとは滑り合うので、被搬送体20は第1の搬送体30aの移動に伴って搬送方向に移動する。次に、図5(c)に示すように、第1の搬送体30aが搬送方向の反対方向に移動すると同時に第2の搬送体30bは搬送方向に移動する。このとき、被搬送体の鋸歯21aと第1の搬送体の鋸歯31aとは滑り合い、被搬送体の鋸歯21bと第2の搬送体の鋸歯31bとは係合するので、被搬送体20は第2の搬送体30bの移動に伴って搬送方向に移動する。このような第1及び第2の搬送体30a,30bの往復移動が繰り返されることによって、被搬送体20は搬送方向に連続的に直進搬送される。
【0031】
また、図6(a)から図6(c)に示すように、第1の搬送体30aのみを往復移動させ、第2の搬送体30bを常に固定する直線搬送機構10´としてもよい。図6(a)に示す状態から、図6(b)に示すように、第1の搬送体30aが搬送方向に移動すると、被搬送体の鋸歯21aと第1の搬送体の鋸歯31aとは係合するので、被搬送体20は第1の搬送体30aの移動に伴って搬送方向に移動する。次に、図6(c)に示すように、第1の搬送体30aが搬送方向の反対方向に移動すると、被搬送体の鋸歯21bと第2の搬送体の鋸歯31bとの係合によって被搬送体20の搬送方向の反対方向への移動は阻止されるので、被搬送体の鋸歯21aと第1の搬送体の鋸歯31aとは滑り合い、被搬送体20は停止した状態を保つ。このような第1の搬送体30aの往復移動が繰り返されることによって、被搬送体20は搬送方向に連続的に直進搬送される。第1及び第2の搬送体30a,30bが往復移動する図5に示した直線搬送機構10に比べて、第1の搬送体30aの一回の往復移動当たりの被搬送体20の移動距離は半分になる。
【0032】
搬送体30を搬送方向に連続して設けた直線搬送機構70について図面に基づき説明する。この直線搬送機構70は、図7(a)に示すように、図2に示した搬送体30を搬送方向に連続させて配置し、各搬送体30をそれぞれ搬送方向と平行に往復振動させる駆動部(不図示)と、各駆動部を独立して制御する制御部(不図示)を備え、駆動部を駆動することによって搬送体30に係合された被搬送体20を搬送体30間を受け渡して搬送方向に直進搬送するものである。搬送体30は、搬送方向への往復移動によって互いに干渉しない隙間を少なくとも設けて、搬送方向に連続して配置されている。なお、図示しないが、前記に示した被搬送体や搬送体の各種態様を適用することができる。
【0033】
搬送元の搬送体30から搬送先の搬送体30へ搬送される被搬送体20は、図7(b)に示すように、搬送元の搬送体の鋸歯31からその鋸歯21の一部が離脱する。そして、図7(c)に示すように、搬送先の搬送体30が移動して当該搬送体の鋸歯31と、この離脱した鋸歯21とが係合することによって、搬送元の搬送体30から搬送先の搬送体30へ受け渡され被搬送体20は搬送される。その後、図7(d)に示すように、搬送先の搬送体30のみの往復移動によって、被搬送体20は搬送方向に搬送される。
【0034】
搬送元の搬送体30から搬送先の搬送体30へ被搬送体20を受け渡すとき、図7(b)に示すように、被搬送体20の鋸歯21の一部が搬送体30の鋸歯31と係合していないので、被搬送体20の搬送が不安定になり得る。そこで、図8(a)に示すように、被搬送体の鋸歯21の歯数を増やしたり、図8(b)に示すように、対向して位置する第1及び第2の搬送体30a,30bを搬送方向に位置ずれさせて配置することにより、受け渡し時の被搬送体の鋸歯21と搬送体の鋸歯31との係合する本数を増やし、被搬送体20の受け渡しをより安定して行うことができる。
【0035】
以下、ラチェット機構を用いた回転搬送機構100について図面に基づき説明する。この回転搬送機構100は、図9(a)に示すように、鋸歯121(121a及び121b)を設けた被搬送体120と、該被搬送体の鋸歯121と係合する鋸歯131(131及び131b)を設けた搬送体130(130a及び130b)と、搬送体130を駆動により往復回動させる駆動部(不図示)、駆動部の駆動を制御する制御部(不図示)を備え、駆動部を駆動することによって搬送体を介して被搬送体120を左回りの搬送方向(搬送体130の回動方向の接線方向)に連続的に回転搬送するものである。
【0036】
被搬送体120は、その中心線を挟んで対称になるように傾斜する鋸歯121a,121bを両側面に刻設しており、中心Oを中心として左回りの搬送方向に搬送されるものである。搬送体130は、中心Oを中心とする所定の円弧からなる側面によって被搬送体120を挟み互いに対向して位置する第1の搬送体130aと第2の搬送体130bとからなり、第1の搬送体130aと第2の搬送体130bとが、その間に挟まれる被搬送体120が搬送される搬送路を構成している。第1の搬送体130aは、被搬送体120の内側面の鋸歯121aと係合するように当該鋸歯121aの傾斜と同方向に傾斜する複数の鋸歯131aを円弧からなる外周面に刻設している。第2の搬送体130bは、被搬送体120の外側面の鋸歯121bと係合するように当該鋸歯121bの傾斜と同方向に傾斜する複数の鋸歯131bを円弧からなる内周面に刻設している。ここで、内とは中心Oに近い側を、外とは中心Oから離れた側を意味している。第1及び第2の搬送体130a,130bは、駆動部の駆動によって中心Oを中心に互いに反対方向に所定の振幅だけ往復回動する。すなわち、第1の搬送体130aが左回りに回転するとき、第2の搬送体130bは右回りに回転し、第1の搬送体130aが左回りに回転するとき、第2の搬送体130bは右回りに回転する。駆動部は、静電マイクロアクチュエータ、圧電マイクロアクチュエータ等の数度の振幅をもった往復回動するマイクロアクチュエータである。また、静電マイクロモータの回転移動を往復回動に変換してもよい。搬送体130の歯間隔は、搬送体130の振幅未満である。なお、図示しないが、他の態様も適用することができる。
【0037】
次に、この回転搬送機構100の搬送動作について図面に基づき説明する。図9(a)に示す状態から、図9(b)に示すように、第1の搬送体130aが左回りに回転すると同時に第2の搬送体130bが右回りに回転する。このとき、被搬送体の鋸歯121aと第1の搬送体の鋸歯131aとは係合し、被搬送体の鋸歯121bと第2の搬送体の鋸歯131bとは滑り合うので、被搬送体120は第1の搬送体130の回転に伴って左回りに回転する。次に、図9(c)に示すように、第1の搬送体130aが右回りに移動すると同時に第2の搬送体130bは左回りに回転する。このとき、被搬送体の鋸歯121aと第1の搬送体の鋸歯131aとは滑り合い、被搬送体の鋸歯121bと第2の搬送体の鋸歯131bとは係合するので、被搬送体120は第2の搬送体130bの回転に伴って左回りに移動する。このような第1及び第2の搬送体130a,130bの往復回動が繰り返されることによって、被搬送体120は左回りに連続的に回転搬送される。なお、右回りに設計した場合には、被搬送体120を右回りに連続的に回転搬送することも可能である。
【0038】
以下、ラチェット機構を用いた分岐搬送機構140について図面に基づき説明する。この分岐搬送機構140は、図10(a)に示すように、図2に示した直進搬送機構10によって搬送された被搬送体20を、左回りに回転搬送する左回り回転搬送機構150aと右回りに回転搬送する右回り回転搬送機構150bを組み合わせ配置することによって、搬送方向を選択して搬送するものである。直進搬送機構10によって搬送された被搬送体20は、左回り回転搬送機構150aと右回り回転搬送機構150bとの間に設けた開口151から、左回り回転搬送機構150a及び右回り回転搬送機構150bを構成する各搬送体によって構成される搬送路内に流入される。図示しない制御部は、作業者の指示等によって、左回り回転搬送機構150aか右回り回転搬送機構150bの何れか一方を動作させる。例えば、左回り回転搬送機構150aを動作させた場合には、図10(b)及び図10(c)に示すように、被搬送体20は、左回り回転搬送機構150aの搬送体によって左回りに搬送される。
【0039】
ラチェット機構を用いた複合搬送機構160について図面に基づき説明する。この複合搬送機構160は、図11に示すように、図2に示した直進搬送機構10等、図9に示した回転搬送機構100、図10に示した分岐搬送機構140とを適宜組み合わせることにより、所望の搬送路を構成したものである。このように、所定の搬送機構を組み合わせることにより搬送路を構成することができるので、搬送路の構築や変更を容易に行うことができる。また、各搬送機構の搬送体は、それぞれ独立に制御部(不図示)によって制御するので、同一の搬送路に同時に複数の被搬送体を搬送してもよい。
【0040】
以下、ラチェット機構を用いた搬送機構において、駆動部に櫛歯型静電マイクロアクチュエータを用いた実施例について図面に基づき説明する。この櫛歯型静電マイクロアクチュエータを用いた直線搬送機構200は、図12に示すように、鋸歯221を設けた被搬送体220と、該被搬送体220の鋸歯221と係合する鋸歯231(231a及び231b)を設け、固定柱240に弾性連結された搬送体230(230a及び230b)と、該搬送体230に設けられた可動電極250と、該可動電極250に対応して設けられた固定電極260と、可動電極250及び固定電極260の電圧を制御する制御部(不図示)を備え、搬送体230を介して被搬送体220を搬送方向に連続的に直進搬送するものである。なお、図中の斜線部は固定部である。なお、図示しないが、他の態様も適用することができる。
【0041】
被搬送体220は、同方向に傾斜する鋸歯221を両側面に刻設している。搬送体230は、被搬送体220を挟んで互いに対向して位置する第1の搬送体230aと第2の搬送体230bからなり、第1の搬送体230aと第2の搬送体230bとが、その間に挟まれる被搬送体220が搬送される搬送路を構成している。第1及び第2の搬送体230a,230bは、被搬送体220の鋸歯221と係合するように当該鋸歯221の傾斜と反対方向に傾斜する複数の鋸歯231a,231bをそれぞれ刻設している。被搬送体及び搬送体の櫛歯221,231の歯間隔は数μm程度である。第1及び第2の搬送体230a,230bは、搬送方向に延びる多数の櫛歯を備えた櫛歯状の可動電極250を固設している。固定電極260は、可動電極250の櫛歯に対応させた搬送方向に延びる多数の櫛歯を備えた櫛歯状の固定された電極であり、これら各電極250,260は電源(不図示)に接続され、正負の電圧が印加される。可動電極250と固定電極260に正負の互いに異なる極性の電圧を印加すると、これらの電極間に生じる引力によって、各電極250,260の櫛歯が重なり合うように、可動電極250が固定電極260側に移動する。可動電極250の変位量は数μm程度であり、被搬送体及び搬送体の鋸歯221,231の歯間隔よりも大きい。可動電極250の移動により、可動電極250が固設された搬送体230は移動する。また、第1及び第2の搬送体230a,230bは、搬送方向と平行な方向に主に弾性変形するばね等の弾性体270によって、それぞれ固定柱240に連結されている。これにより、搬送方向と平行な方向に移動する搬送体230の移動時における摩擦の影響を低減し安定した移動とすることができるとともに、可動電極250と固定電極260との接触を防止することができる。さらに、図示していないが、搬送方向と直交する方向に主に弾性変形するばね等の弾性体によっても、第1及び第2の搬送体230a,230bがそれぞれ固定柱240に連結されていてもよい。
【0042】
この直線搬送機構200の搬送動作について図面に基づき説明する。図13(a)に示すように、被搬送体220は、第1及び第2の搬送体230a,230bとの間に挟まれて位置しており、各電極250,260に電圧が印加されていない。次に、例えば、第1の搬送体230aの可動電極250に正の電圧を印加し、第1の搬送体230aに図中上側の可動電極250に対応する固定電極260に負の電圧を印加する。また同時に、例えば、第2の搬送体230bの可動電極250に正の電圧を印加し、第2の搬送体230bの図中下側の可動電極250に対応する固定電極260に負の電圧を印加する。これにより、図13(b)に示すように、第1の搬送体230aが搬送方向に移動すると同時に第2の搬送体230bが搬送方向と反対方向に移動する。このとき、被搬送体の鋸歯221と第1の搬送体の鋸歯231aとは係合し、被搬送体の鋸歯221と第2の搬送体の鋸歯231bとは滑り合うので、被搬送体220は第1の搬送体230aの移動に伴って搬送方向に移動する。次に、各電極250,260に印加している電圧を解放する。これにより、弾性体270の復元力によって、図13(c)に示すように、第1の搬送体230aが搬送方向の反対方向に移動すると同時に第2の搬送体230bは搬送方向に移動する。このとき、被搬送体の鋸歯221と第1の搬送体の鋸歯231aとは滑り合い、被搬送体の鋸歯221と第2の搬送体の鋸歯231bとは係合するので、被搬送体220は第2の搬送体230bの移動に伴って搬送方向に移動する。このような第1及び第2の搬送体230a,230bの往復移動が繰り返されることによって、被搬送体220は搬送方向に連続的に直進搬送される。
【0043】
櫛歯型静電マイクロアクチュエータを用いた回転搬送機構300は、図14(a)に示すように、鋸歯321を設けた被搬送体320と、該被搬送体の鋸歯321と係合する鋸歯331を設け、固定柱340に弾性連結され、回動可能な第1の搬送体330aと、被搬送体の鋸歯321と係合する鋸歯331bを設け、固定柱341に弾性連結された第2の搬送体330bと、第1の搬送体330aに設けられた可動電極350と、該可動電極350に対応して設けられた固定電極360と、可動電極350及び固定電極360の電圧を制御する制御部(不図示)を備え、第1及び第2の搬送体330a,330bを介して被搬送体320を左回り方向の搬送方向に連続的に回転搬送するものである。
【0044】
被搬送体320は、その中心線を挟み対称となるように傾斜する鋸歯321を両側面に刻設しており、中心軸Oを中心として左回りの搬送方向に搬送されるものである。第1及び第2の搬送体330a,330bは、中心軸Oを中心とする所定の円弧からなる側面の間に被搬送体320を挟み互いに対向して位置しており、これら第1及び第2の搬送体330a,330bによって、その間に挟まれた被搬送体320が搬送される搬送路が構成されている。第1の搬送体330aは、被搬送体320の内側面の鋸歯321aと係合するように当該鋸歯321aの傾斜と同方向に傾斜する複数の鋸歯331aを円弧からなる外周面に刻設している。第2の搬送体330bは、被搬送体320の外側面の鋸歯321bと係合するように当該鋸歯321bの傾斜と同方向に傾斜する複数の鋸歯331bを円弧からなる内周面に刻設している。ここで、内とは中心軸Oに近い側を、外とは中心軸Oから離れた側を意味している。被搬送体及び搬送体の櫛歯321,331の歯間隔は数μm程度である。第1の搬送体331は、中心軸Oを中心として回動可能な回動棒322を設けている。この回動棒332は、直線状に延びる多数の平行な櫛歯を備えた櫛歯状の可動電極350を固設している。これら可動電極350は電源(不図示)に接続され正負の電圧が印加される。固定電極360は、可動電極350の櫛歯に対応させた直線状に延びる多数の平行な櫛歯を備えた櫛歯状の固定された電極であり、電源(不図示)に接続され正負の電圧が印加される。可動電極350の移動により、可動電極350が固設された回動棒332が回転し、第1の搬送体330aが中心軸Oを中心に回転する。可動電極350の変位量は数μm程度であり、第1の搬送体330aは数度の範囲で回動し、第1の搬送体の鋸歯331a部分の変位量は、被搬送体及び搬送体の櫛歯321,331の歯間隔よりも大きい。また、可動電極350は、弾性変形するばね等の弾性体342によって固定柱340に連結されている。これにより、第1の搬送体330aの回動時における摩擦の影響を低減し安定した移動とすることができるとともに、可動電極350と固定電極360との接触を防止することができる。一方、第2の搬送体330bは、弾性変形するばね等の弾性体(逃し部、図3(b)参照。)343によって、固定柱341に連結されている。これにより、第1又は第2の搬送体の鋸歯331a,331bと被搬送体の鋸歯321とが滑り合うとき、鋸歯の干渉によって第2の搬送体330bが固定柱341に向かって適宜移動するので、被搬送体320を搬送方向に向かって滑らかに搬送することができる。
【0045】
この回転搬送機構300の搬送動作について図面に基づき説明する。図14(a)に示すように、被搬送体320は、第1及び第2の搬送体330a,330bとの間に挟まれて位置しており、各電極350,360に電圧は印加されていない。次に、例えば、可動電極350に正の電圧を印加し、図中左側の可動電極350に対応する固定電極360に負の電圧を印加する。これにより、図14(b)に示すように、第1の搬送体330aが中心軸Oを中心に左回りに回転する。このとき、被搬送体の鋸歯321aと第1の搬送体の鋸歯331aとは係合し、被搬送体の鋸歯321bと第2の搬送体の鋸歯331bとは滑り合うので、被搬送体320は第1の搬送体330の回転に伴って搬送方向に移動する。次に、各電極350,360に印加している電圧を解放する。これにより、弾性体342の復元力によって、第1の搬送体330aは中心軸Oを中心に右回りに回転する。このとき、被搬送体の鋸歯321aと第1の搬送体の鋸歯331aとは滑り合うので、被搬送体320は移動しない。このような第1の搬送体330aの往復回動が繰り返されることによって、被搬送体320は左回りに連続的に回転搬送される。なお、右回りに設計した場合には、被搬送体320を右回りに連続的に回転搬送することも可能である。
【0046】
ところで、前記可動電極350及び固定電極360に互いに極性の異なる電圧が印加されると、各電極350,360の櫛歯が重なり合うように、可動電極350が中心軸Oを中心に回動する。そのため、各電極350,360の櫛歯が接触するおそれが生じる。これを解消するために、図15(a)に示すように、可動電極350及び固定電極360に設けた各櫛歯を回転軸Oを中心とし円弧状に延びる形状としている。これにより、各電極350,360の櫛歯が重なり合うように可動電極360が回動するとき、隣接する櫛歯間の距離が一定に保たれるので、各電極350,360の櫛歯が接触するおそれがない。
【0047】
また、ばね等を用いることなく、部材もしくは部材の一部分を弾性変形容易とすることにより、搬送機構を構成してもよい。例えば、回転搬送機構301は、図15(b)に示すように、回動棒333の固定柱344への連結部付近の部材幅を狭めることにより、弾性変形容易な部位334を設けている。回動棒333には可動電極351が設けられており、適切な電圧が印加され可動電極351が移動すると、回動棒333が部位334を回転中心Oとして回動し、電圧が解放されると、部位334の復元力によって回動棒333が元の位置に戻る。回転搬送機構302は、図16(a)に示すように、可動電極352を固設する枠に、先端形状が弧状の押部353が設けられ、この押部353と固定柱334,345とが幅狭の細長部354によってそれぞれ連結されている。適切な電圧が印加され可動電極352が固定電極361へ向かって移動すると、これに伴い回動棒333が押部353に押され部位334を回転中心Oとして回転する。この時、細長部354は押部353の移動に伴って弾性変形する。電圧が解放されると、部位334及び細長部354の復元力によって回動棒333が元の位置に戻る。回転搬送機構303は、図16(b)に示すように、可動電極352を固設する枠に、先端形状がT字状の引部355が設けられ、この引部355の先端形状に対応する凹状の嵌合部335が回動棒333に設けられている。回転搬送機構303は、可動電極352の移動に伴い引部355が嵌合部335を介して引くことよって回動棒333を回転させる。
【0048】
櫛歯型静電マイクロアクチュエータを用いた別の回転搬送機構370は、図17に示すように、外周面及び内周面に鋸歯371a,371bをそれぞれ刻設したドーナツ状の被搬送体372と、該被搬送体の外周面の鋸歯371aと係合する鋸歯373を内周面に刻設し、固定柱374に弾性連結され、回動可能な第1の搬送体375と、被搬送体372の内周面の鋸歯371bと係合する鋸歯376を刻設し固定された第2の搬送体377と、第1の搬送体375に設けられた可動電極378と、該可動電極378に対応して設けられた固定電極379と、可動電極378及び固定電極379の電圧を制御する制御部(不図示)とを備え、第1及び第2の搬送体375,377を介して被搬送体372を左回り方向の搬送方向に連続的に回転搬送するものである。なお、被搬送体372は、図示しないが、図3(a)等に示した逃し部を備えている。
【0049】
この回転搬送機構370の搬送動作について図面に基づき説明する。被搬送体372は、第1及び第2の搬送体375,377との間に挟まれて位置しており、各電極378,379に電圧が印加されていない状態から、例えば、全ての可動電極378に正の電圧を印加し、全ての固定電極379に負の電圧を印加する。これにより、第1の搬送体375が左回りに回転する。このとき、被搬送体372の鋸歯371aと第1の搬送体375との鋸歯373とは係合し、被搬送体372の鋸歯371bと第2の搬送体377の鋸歯376とは滑り合うので、被搬送体372は第1の搬送体375の回転に伴って左回りに回転する。次に、各電極378,379に印加している電圧を解放すると、弾性力によって、第1の搬送体375が右回りに回転する。このとき、被搬送体372の鋸歯371bは第2の搬送体377の鋸歯376との係合によって右回りへの回転移動は阻止されるので、被搬送体372は右回りに回転しない。第1の搬送体375の往復回動が繰り返されることによって、被搬送体372は左回りに連続的に回転搬送される。このように、ドーナツ状の被搬送体372が連続的に回転搬送されるので、例えばターンテーブルのように用いることができ、この被搬送体372の上に搬送物を載置することにより、搬送物を回転搬送することができる。また、ドーナツ状の被搬送体372の代わりに、図14等に示したような被搬送体320を用いた場合であっても、同様に回転搬送することができる。なお、右回りに設計した場合には、被搬送体372を右回りに連続的に回転搬送することができる。
【0050】
櫛歯型静電マイクロアクチュエータを用いたさらに別の回転搬送機構380は、図18に示すように、両側面に鋸歯381を刻設した被搬送体382と、該被搬送体の鋸歯381と係合する鋸歯383を外周面に刻設し、固定柱384に弾性連結され、回動可能な2つの搬送体385と、搬送体385の内周面から中心に向かってそれぞれ突設された可動電極386と、該可動電極386に対応して搬送体385の内側にそれぞれ設けられた固定電極387と、可動電極386及び固定電極387の電圧を制御する制御部(不図示)を備え、搬送路388を搬送されてきた被搬送体382を2つの搬送体385を介して搬送方向に搬送するものである。なお、被搬送体382は、図示しないが、図3(a)等に示した逃し部を備えている。
【0051】
この回転搬送機構380の搬送動作について図面に基づき説明する。被搬送体は、2つの搬送体385との間に挟まれて位置しており、各電極386,387に電圧が印加されていない状態から、例えば、全ての可動電極386に正の電圧を印加し、可動電極386の左回り側に位置する全ての固定電極387に負の電圧を印加する。これにより、2つの搬送体385がそれぞれ左回りに回転する。このとき、被搬送体382の鋸歯381は、図中左下の搬送体385の鋸歯383とは係合するとともに、図中右上の搬送体385の鋸歯383とは滑り合うので、被搬送体382は搬送方向に移動する。次に、各電極386,387に印加している電圧を解放すると、弾性力によって、2つの搬送体385はそれぞれ右回りに回転する。このとき、被搬送体382の鋸歯383は、図中左下の搬送体385の鋸歯383とは滑り合うとともに、図中右上の搬送体385の鋸歯383とは係合するので、被搬送体382は搬送方向に移動する。このような2つの搬送体385の往復回動が繰り返されることによって、被搬送体382は搬送方向に搬送される。
【0052】
櫛歯型静電マイクロアクチュエータを用いた分岐搬送機構400は、図19(a)及び図19(b)に示すように、図12に示した櫛歯型静電マイクロアクチュエータを用いた直進搬送機構200によって搬送された被搬送体410の搬送方向を、左右に移動する方向指示部(制御部材)420によって分岐路の左右何れかの搬送路を択一的に定めるものである。方向指示部420は、分岐路の入口に位置する矢状の先端421を備え、可動電極430の移動に伴い左右に往動し、分岐路の左右何れか一方の搬送路の壁面と先端421との距離が被搬送体410の幅を超える幅とする。直進搬送機構200によって搬送された被搬送体410は、開口440から分岐路内に流入し、搬送されてきた慣性力によってそのまま直進する。図示しない制御部は、作業者の指示等によって、可動電極430及び固定電極450に印加する電圧を制御し、方向指示部の先端421を左右の何れか一方にずらして位置させる。例えば、各電極430,450に適当な電圧が印加されていない図19(a)に示す状態から、各電極430,450に適当な電圧を印加することにより、図19(b)に示すように、方向指示部の先端421を右へ移動させた場合には、右側の搬送路の壁面と先端421との距離が被搬送体410の幅未満となり、右側の搬送路への移動が阻止されるとともに、左側の搬送路の壁面と先端421との距離が被搬送体410の幅を超えるので、被搬送体410は左側の搬送路へと搬送される。なお、図中に示す被搬送体410のように、曲線からなる凸状の先端部を設けることにより、所望の搬送路へより確実に搬送することができる。
【0053】
以下、櫛歯型静電マイクロアクチュエータを用いた直進搬送機構、分岐搬送機構とから構成した複合搬送機構を適用した微小化学分析システムの実施例について図面に基づき説明する。この微小化学分析システム500は、図20に示すように、液滴や微小固体からなる試料を搭載する試料搬送車510と、該試料搬送車510又はこれに搭載した試料に対して各種の作用を行う複数の作用部520と、これら作用部520間にて試料搬送車を搬送する搬送機構530を備えるものである。作用部520は、試料搬送車510を搬送機構に投入する試料投入部520a、試料搬送車510に載置された試料に対して分析や試薬の混合を行う分析部520b、搬送機構530から排出された試料搬送車510を蓄える取出口520c等からなる。なお、試薬の混合は、分析部520bで行うことには限定されず、試料投入部520aなどで行ってもよい。また、図示しないが、複数の搬送路を1つの搬送路に合流させる合流搬送機構を設けてもよい。試料搬送車510及び搬送機構530は、シリコンからなり、半導体微細加工技術を用いて製作されている。なお、本発明に係る搬送機構は、微小化学分析システム等のバイオMEMS分野に好適に用いることができるが、それに限定されず、他にも環境測定等の各種測定、分析などの分野に用いることができる。
【0054】
試料搬送車は、図12に示した被搬送体220等の上面に試料を入れる凹部を適宜設けたものであってよいが、図20における試料搬送車は、図21に示すように、第1及び第2の鋸歯部511a,511b、中央部512、ばね部(逃し部)513、規制部(逃し部)514,515を備えている。第1及び第2の鋸歯部511a,511bは、中央部512を挟み対称に形成されており、それぞれ搬送機構530を構成する搬送体の鋸歯と係合する鋸歯516a,516bを外側面に刻設し、中央部512に向う2つの平行な突起514を内側面に突設している。中央部512は、第1及び第2の鋸歯部511a,511bとの間に位置し、試料を入れる凹部517を上面に設け、曲面からなる凸状の先端部518を設け、第1及び第2の鋸歯部の2つの突起514がその間に位置するように第1及び第2の鋸歯部511a,511bにそれぞれ向かって突出する突起515を両側面に突設している。これら第1及び第2の鋸歯部の突起514と中央部の突起515が、第1及び第2の鋸歯部511a,511bと中央部512との搬送方向に平行な方向への所定以上の相対移動を規制する規制部を構成している。中央部の突起515には、第1及び第2の鋸歯部の突起514と対向する面に凹凸が設けられており、突起間の干渉による摩擦を低減している。ばね部513は、第1及び第2の鋸歯部511a,511bの内側面と中央部512の両側面とをそれぞれ連結するばねからなるものである。ばね部513を備えることにより、鋸歯516a,516bと搬送体の鋸歯とが滑り合うとき、鋸歯の干渉に伴って第1又は第2の鋸歯部511a,511bが中央部512に向かって適宜移動するので、試料搬送車510を搬送方向に向かって滑らかに搬送することができる。ここで、内側面とは試料搬送車510の縦中心側の側面を、外側面とは試料搬送車510の縦中心軸から離れた側の側面を意味する。なお、試料搬送車510は、図22(a)に示すように、ばね部513を変形したばね定数の大きなばね部513´を設けたものや、図22(b)に示すように、第1及び第2の鋸歯部511a,511bと中央部512とを一体に形成したものであってもよい。実施例において、試料搬送車510は長さ400μm、幅220μmである。
【0055】
搬送機構530は、図12に示した直進搬送機構200を用い搬送路が直線状の直線搬送ブロック530a、図19に示した分岐搬送機構400を用い搬送路を分岐させる分岐搬送ブロック530b、搬送路が曲線状の曲線搬送ブロック530c等の搬送ブロックを適宜組み合わせることにより、所望の搬送路を構成するものである。このように、所定の搬送ブロックを組み合わせることにより搬送路を構成することができるので、搬送路の構築や変更を容易に行うことができる。また、各搬送ブロックの搬送体は、それぞれ独立に制御部(不図示)によって制御されており、搬送路に同時に複数の試料搬送車510を搬送することができる。なお、図20に示した曲線状搬送ブロックにおいては、自在に回転するコロを曲線状の搬送路の両側面に設けており、この搬送路を搬送されてきた試料搬送車510の慣性力の減衰を抑え、隣接する搬送ブロックに送出する。なお、図14から図17に示した回転搬送機構300,370や、図18に示した搬送機構380を用いて曲線状搬送ブロック530cを構成してもよい。実施例において、各搬送ブロックは5.6mm角である。
【0056】
試料搬送車510は、単独で用いてもよいが、試料搬送車510の全長が長くなると曲線状の搬送路を確実に搬送することが困難になるので、複数台の試料搬送車510を一緒に搬送してもよい。例えば、図23(a)に示すように、試料搬送車510´の中央部512の前端又は後端に連結軸518を設け、この連結軸518に対して自在に回動可能な連結棒519を用い、複数台の試料搬送車510´を連結してもよい。また、図23(b)に示すように、先頭及び尾部に連結された試料搬送車510´以外の試料搬送車を、試料を入れる凹部を上面に設けた中央部512´のみからなるものとし、試料搬送車510´に連結してもよい。さらに、図24に示すように、中央部512の前端又は後端に左右方向又は斜め方向に延びる押出部519を設けた試料搬送車540を複数台連接して搬送してもよい。このような試料搬送車540が搬送路に沿って前後に連続して搬送することによって、それぞれの試料搬送車540が搬送体によって搬送されるとともに、後続の試料搬送車540によって搬送方向に押出されるので、複数の試料搬送車540を確実に搬送することができる。
【0057】
以下、本発明の第2の実施の形態に係る掃出し機構を用いた搬送機構について図面に基づき説明する。この掃出し機構を用いた直進搬送機構600は、図25に示すように、矩形状突起621を設けた被搬送体620と、該被搬送体の矩形状突起621と係合する矩形状突起631(631a及び631b)を設けた搬送体630(630a及び630b)と、被搬送体620の搬送方向と平行な方向及びその直交方向に搬送体630を駆動によりそれぞれ往復移動させる駆動部640、該駆動部640の駆動を制御する制御部650を備え、駆動部640を駆動することによって搬送体630を介して被搬送体620を搬送方向に連続的に直進搬送するものである。
【0058】
被搬送体620は、互いに平行な矩形状突起621を両側面から外側に向かって突設している。搬送体630は、被搬送体620を挟み互いに対向して位置する第1の搬送体630aと第2の搬送体630bからなり、第1及び第2の搬送体630a,630bとによって、その間に挟まれた被搬送体620を搬送される搬送路を構成している。第1及び第2の搬送体630a及び630bは、被搬送体620の矩形状突起621がその間に位置することが可能な間隔で互いに平行な多数の矩形状突起631a,630bを互いに向き合うようにそれぞれの内側面から突設している。第1及び第2の搬送体630a,630bは、駆動部640の駆動によって被搬送体620の搬送方向と平行な方向に所定の振幅だけ同方向に往復移動する。また、第1及び第2の搬送体630a,630bは、駆動部640の駆動によって被搬送体620の搬送方向と直交する方向であって互いに逆方向に、所定の振幅だけ往復移動する。すなわち、第1の搬送体630aが外側(図中左側)に移動するとき、第2の搬送体630bは外側(図中右側)に移動し、第1の搬送体630aが内側(図中右側)に移動するとき、第2の搬送体630bは内側(図中左側)に移動する。このような第1及び第2の駆動体630a,630bの往復移動をもたらす駆動部640は、各往復移動に対応して1つずつ設けられた、静電マイクロアクチュエータ、圧電マイクロアクチュエータ等の数μm程度の振幅を有するリニア往復運動するマイクロアクチュエータからなる。また、静電マイクロモータの回転運動をリニア往復運動に変換してもよい。なお、第1及び第2の搬送体630a,630bの搬送方向と平行な方向への往復運動、第1及び第2の搬送体630a,630bの搬送方向に直交する方向への往復運動に、それぞれに対応するマイクロアクチュエータを計2つ設けてもよいし、第1の搬送体630aの各方向への往復運動、第2の搬送体630bの各方向への往復運動に、それぞれに対応するマイクロアクチュエータを計4つ設けてもよい。
【0059】
この直進搬送機構600の搬送動作について図面に基づき説明する。図26(a)に示すように、被搬送体620は、第1及び第2の搬送体630a,630bとの間に挟まれて位置している。この状態から、図26(b)に示すように、第1及び第2の搬送体630a,630bが搬送方向に協動して移動する。このとき、被搬送体の矩形状突起621と第1及び第2の搬送体の矩形状突起631とが係合し、被搬送体620は第1及び第2の搬送体630a,630bの移動に伴って搬送方向に移動する。次に、図26(c)に示すように、第1及び第2の搬送体630a,630bがそれぞれ外側に移動する。このとき、被搬送体の矩形状突起621と第1及び第2の搬送体の矩形状突起631a,631bとによる係合が解除される。次に、図26(d)に示すように、第1及び第2の搬送体630a,630bがそれぞれ搬送方向と反対方向に移動した後、第1及び第2の搬送体630a,630bがそれぞれ内側に移動する。このように、第1及び第2の搬送体630a,630bの2方向への往復移動が繰り返されることによって、被搬送体620は搬送方向に連続的に直進搬送される。
【0060】
被搬送体及び搬送体の矩形状突起621,631は、搬送体630が搬送方向に移動する際に被搬送体620が搬送体630と係合し共に移動するように、また、搬送体630が外側に移動する際に被搬送体620と搬送体630との係合が解除するように設けられたものであり、その形状は限定されない。例えば、搬送体の矩形状突起631を、図27(a)に示すように、先端部がテーパ状になった突起632としてもよい。これにより、搬送体630が内側に移動し被搬送体620と再び係合する際に、その係合をより確実に行うことができる。また、図27(b)に示すように、搬送体630の内側面に多数の三角突起633を設けてもよい。また、図27(c)に示すように、被搬送体及び搬送体にそれぞれ鋸歯625,635を設けてもよい。これらにより、搬送体630が内側に移動し被搬送体620と再び係合する際に、その係合をより確実に行うことができる。
【0061】
以下、掃出し機構を用いた回転搬送機構700について図面に基づき説明する。この回転搬送機構700は、図28(a)に示すように、矩形状突起721を設けた被搬送体720と、該被搬送体の矩形状突起721(721a及び721b)と係合する矩形状突起731(731a及び731b)を設けた搬送体730(730a及び730b)と、搬送体730を駆動により往復回動及び往復上下動させる駆動部(不図示)、駆動部の駆動を制御する制御部(不図示)を備え、駆動部を駆動することによって搬送体730を介して被搬送体720を左回りの搬送方向に連続的に回転搬送するものである。
【0062】
被搬送体720は、互いに略平行な矩形状突起721a,721bを両側面から外側に向かって突設しており、中心Oを中心として左回りの搬送方向に搬送されるものである。搬送体730は、中心Oを中心とする所定の円弧からなるその側面の間に被搬送体720を挟み互いに対向して位置する第1の搬送体730aと第2の搬送体730bとからなり、第1及び第2の搬送体730a,730とによって、その間に挟まれた被搬送体720が搬送される搬送路を構成している。第1の搬送体730aは、被搬送体720の内側面の矩形状突起721aがその間に位置することが可能な間隔で中心Oから外側に向かう多数の矩形状突起731aを円弧からなる外側面に突設している。第2の搬送体730bは、被搬送体720の外側面の矩形状突起721bがその間に位置することが可能な間隔で中心Oへ内側に向かう多数の矩形状突起731bを円弧からなる内側面に突設している。ここで、内側とは中心Oに近い側を、外側とは中心Oから離れた側を意味している。第1及び第2の搬送体730a,730bは、駆動部の駆動によって中心Oを中心に所定の振幅だけ同方向に往復運動する。すなわち、第1の搬送体730aが左回りに回転するとき、第2の搬送体730bも左回りに回転し、第1の搬送体730aが右回りに回転するとき、第2の搬送体730bは右回りに回転する。また、第1及び第2の搬送体730a,730bは、駆動部の駆動によって上下方向に、すなわち第1及び第2の搬送体の矩形状突起731a,731bが中心Oに対して近づき離れる方向であって互いに逆方向に所定の振幅だけ往復運動する。駆動部は、静電マイクロアクチュエータ、圧電マイクロアクチュエータ等の数度の振幅をもった往復回動するマイクロアクチュエータである。また、静電マイクロモータの回転運動を往復回動に変換してもよい。搬送体の矩形状突起731の間隔は、搬送体730の振幅未満である。なお、図示しないが、他の態様も適用することができる。
【0063】
この回転搬送機構700の搬送動作について図面に基づき説明する。図28(a)に示す状態から、図28(b)に示すように、第1及び第2の搬送体730a,730bが左回りに協動して回転する。このとき、被搬送体の矩形状突起721a,721bと第1及び第2の搬送体の矩形状突起731a,731bとが係合し、被搬送体720は第1及び第2の搬送体730a,730bの回転に伴って左回りに回転する。次に、図28(c)に示すように、第1の搬送体730aが下方向に移動し、第2の搬送体730bが上方向に移動する。このとき、被搬送体の矩形状突起721a,721bと第1及び第2の搬送体の矩形状突起731a,731bとの係合が解除される。次に、図28(d)に示すように、第1及び第2の搬送体730a,730bが右回りに回転した後、第1の搬送体730aが上側に移動し、第2の搬送体730bが下側に移動し、被搬送体の矩形状突起721a,721bと第1及び第2の搬送体の矩形状突起731a,731bとが再び係合する。このように、第1及び第2の搬送体730a,730bの2方向への往復運動が繰り返されることによって、被搬送体720は左回りに連続的に回転搬送される。なお、右回りに設計した場合には、被搬送体320を右回りに連続的に回転搬送することも可能である。
【0064】
以下、掃出し機構を用いた複合搬送機構750について図面に基づき説明する。この複合搬送機構は、図29に示すように、図25に示した直進搬送機構600、図28に示した回転搬送機構700、及び分岐搬送機構760等を適宜組み合わせることにより、所望の搬送路を構成したものである。このように、所定の搬送機構を組み合わせることにより搬送路を構成することができるので、搬送路の構築や変更を容易に行うことができる。また、各搬送機構の搬送体は、それぞれ独立に制御部(不図示)によって制御するので、同一の搬送路に同時に複数の被搬送体を搬送してもよい。ここで、分岐搬送機構760は、直進搬送機構600によって搬送された被搬送体を、左回りに回転搬送する左回り回転搬送機構761と右回りに回転搬送する右左回り回転搬送機構762とを組み合わせ配置することによって、搬送方向を選択して搬送するものである。図示しない制御部は、作業者の指示等によって、左回り回転搬送機構761及び右回り回転搬送機構762の何れか一方を動作させる。例えば、左回り回転搬送機構761を動作させた場合には、被搬送体は左回り回転搬送機構761を構成する搬送体に係合されることによって左回りに搬送される。
【0065】
以下、掃出し機構を用いた搬送機構において、駆動部に櫛歯型静電マイクロアクチュエータを用いた実施例について図面に基づき説明する。この櫛歯型静電マイクロアクチュエータを用いた直線搬送機構800は、図30に示すように、矩形状突起821を設けた被搬送体820と、該被搬送体820の矩形状突起821と係合する矩形状突起831を設け、棒状突起832と屈曲凹部833が形成された搬送体830と、棒状突起832の側面と接する突起841を備えた枠に固設された第1の可動電極840と、該第1の可動電極840に対応して設けられた第1の固定電極850と、屈曲凹部833に嵌設された屈曲端部861を端部に固設する第2の可動電極860と、該第2の可動電極860に対応して設けられた固定電極870と、各電極840,850,860,870の電圧を制御する制御部(不図示)とを備え、搬送体830を介して被搬送体820を搬送方向に連続的に直進搬送するものである。なお、図示しないが、他の態様も適用することができる。
【0066】
被搬送体820は、互いに平行な矩形状突起821を両側面から外側に向かって突設している。2つの搬送体830は、被搬送体820を挟み互いに対向して位置し、その間に挟まれた被搬送体820が搬送される搬送路を構成している。搬送体830は、被搬送体820の矩形状突起821がその間に位置することが可能な間隔で互いに平行な多数の矩形状突起831をそれぞれの内側面から内側に向かって突設している。被搬送体及び搬送体の矩形状突起821,831の間隔は数μm程度である。搬送体830は、その外側面の中央部付近から外側に向かって延びる棒状突起832を、その上下端部付近に外側面に開口を有する屈曲凹部831に設けている。棒状突起832の側面と接する突起841を備えた枠に櫛歯状の第1の可動電極840が固設され、該第1の可動電極840は搬送方向に延びる多数の櫛歯を備えている。第1の固定電極850は、第1の可動電極840の櫛歯に対応させた搬送方向に延びる多数の櫛歯を備えている。屈曲凹部833に嵌設された屈曲端部861を端部に有する棒状部材の他端に第2の可動電極860が固設され、該第2の可動電極860は搬送方向に直交する方向に延びる多数の櫛歯を備えている。第2の固定電極870は、第2の可動電極860の櫛歯に対応させた搬送方向に直交する方向に延びる多数の櫛歯を備えた櫛歯状の固定された電極である。これら各電極840,850,860,870は電源(不図示)に接続され、正負の電圧が印加される。第1及び第2の固定電極850,870に対する第1及び第2の可動電極840,860の相対変位量は数μm程度であり、被搬送体及び搬送体の矩形状突起821,831の間隔よりも大きい。また、第1の可動電極840を固設する枠がばね等の弾性体880によって固定柱881に、搬送体830の棒状突起832がばね等の弾性体882によって固定柱883に、それぞれ連結されている。第1の可動電極840の移動により、第1の可動電極840が固設された枠に設けられた突起841に棒状突起832が押されることに伴って、搬送方向に搬送体830が移動する。このとき、搬送体830は、搬送方向と平行な方向に屈曲凹部833の両側面と屈曲端部861の両側面とが接しており、搬送体430を搬送方向に確実に移動することができる。第2の可動電極860の移動により、第2の可動電極860が固設された屈曲端部861とともに屈曲凹部833が外側に移動することに伴って、搬送体830が搬送方向と直交する方向に移動する。
【0067】
この直線搬送機構800の搬送動作について図面に基づき説明する。図31(a)から図31(d)においては、弾性体880,882及び固定柱881,883を省略して直線搬送機構800を図示している。図31(a)に示すように、被搬送体820は、2つの搬送体830との間に挟まれて位置しており、各電極840,850,860,870には電圧が印加されていない。次に、例えば、図中下側の第1の可動電極840に正の電圧をそれぞれ印加し、該第1の可動電極840に対応する第1の固定電極850に負の電圧を印加する。これにより、図中下側の突起841が棒状突起832を搬送方向に押し出すことによって、図31(b)に示すように、2つの搬送体830が搬送方向に協動して移動する。このとき、被搬送体の矩形状突起821と搬送体の矩形状突起831とが係合し、被搬送体820は搬送体830の移動に伴って搬送方向に移動する。次に、例えば、第2の可動電極860に正の電圧を印加し、第2の固定電極870に負の電圧を印加する。これにより、屈曲端部861とともに屈曲凹部833が外側に移動することによって、図31(c)に示すように、搬送体830がそれぞれ外側に移動し、被搬送体820と搬送体830との係合が解除される。次に、第1の可動電極840及び第1の固定電極850に印加している電圧を解放する。これにより、弾性体880,882(図30参照)の復元力によって、搬送体830が搬送方向の反対方向に移動する。さらに、第2の可動電極860及び第2の固定電極870に印加している電圧を解放する。これにより、弾性体882の復元力によって、図31(d)に示すように、搬送体830がそれぞれ内側に移動する。このとき、被搬送体820と搬送体830とが再び係合する。このような搬送体830の2方向への往復移動が繰り返されることによって、被搬送体820は搬送方向に連続的に直進搬送される。
【0068】
櫛歯型静電マイクロアクチュエータを用いた回転搬送機構900は、図32に示すように、矩形状突起921を設けた被搬送体920と、該被搬送体920の矩形状突起921と係合する矩形状突起931を設け、可動中心Oに対して回動可能な第1の搬送体930aと、固定柱940に弾性連結された第2の搬送体930bと、固定柱941に弾性連結された第1の可動電極950と、該第1の可動電極950に対応して設けられた第1の固定電極960と、固定柱942に弾性連結された第2の可動電極970と、該第2の可動電極970に対応して設けられた第2の固定電極980と、各電極950,960,970,980の電圧を制御する制御部(不図示)を備え、第1及び第2の搬送体930a,930bを介して被搬送体920を左回り方向の搬送方向に連続的に回転搬送するものである。
【0069】
被搬送体920は、互いに略平行な矩形状突起921を内側の側面に突設しており、中心Oを中心として左回りの搬送方向に搬送されるものである。第1及び第2の搬送体930a,930bは、中心Oを中心とする所定の円弧からなるそれぞれの側面によって被搬送体920を挟み互いに対向して位置し、その間に挟まれる被搬送体920が搬送される搬送路を構成する。第1の搬送体930aは、被搬送体920の内側の側面の矩形状突起921がその間に位置することが可能な間隔で中心Oから外側に向かう多数の矩形状突起931を円弧からなる外周面に突設している。第2の搬送体930bは、被搬送体920の外側の側面と接する円弧からなる内周面を備えている。ここで、内側とは中心Oに近い側を、外側とは中心Oから離れた側を意味している。被搬送体920及び第1の搬送体930aの矩形状突起921,931の間隔は数μm程度である。第1の搬送体930aは、可動中心Oを中心として回動可能な回動棒990に固設されている。第1の可動電極950は、中心Oを中心とした円弧状に伸びる多数の櫛歯を備えるともに、回動棒990にその弧状先端が接触する回動規制部951を一体に設けている。回動棒990は、回動規制部951の弧状先端によって挟み込まれることによって、可動中心Oを中心とする回動が規制される。なお、図示しない部材によって、回動棒990を中心として対称に位置する2つの回動規制部951は一体に設けられている。第1の固定電極960は、第1の可動電極950の櫛歯に対応させた中心Oを中心とした円弧状に伸びる多数の櫛歯を備えた櫛歯状の固定された電極である。第2の可動電極970は、上下方向に伸びる多数の櫛歯を備えるとともに、回動棒990の回動中心となる中心Oに可動中心軸991を一体に設けている。第2の固定電極980は、第2の可動電極970の櫛歯に対応させた上下方向に伸びる多数の櫛歯を備えた櫛歯状の固定された電極である。これら各電極950,960,970,980は電源(不図示)に接続され、正負の電圧が印加される。第1及び第2の固定電極960,980に対する第1及び第2の可動電極950,970の相対変位量は数μm程度であり、被搬送体及び搬送体の矩形状突起921,931の間隔よりも大きい。第1の可動電極950の移動により、第1の可動電極950に設けられた回動規制部951の弧状先端によって挟み込まれた回動棒990が可動中心軸971を中心に回転する。第2の可動電極970の移動により、第2の可動電極970と一体の可動中心軸991が移動するとともに、この可動中心軸991を回動中心とする回動棒990が第1の搬送体930aとともに移動する。また、第1の可動電極950は、弾性変形するばね等の弾性体943によって固定柱941に連結されている。第2の可動電極970は、弾性変形するばね等の弾性体944によって固定柱942に連結されている。さらに、第2の搬送体930bは、弾性変形するばね等の弾性体945(逃し部、図3(b)参照。)によって、固定柱940に連結されている。これにより、被搬送体の矩形状突起921と第1の搬送体の矩形状突起931とが係合し、被搬送体920が第1の搬送体930aとともに移動するので、被搬送体920を搬送方向に向かって滑らかに搬送することができる。
【0070】
この回転搬送機構900の搬送動作について図面に基づき説明する。図33(a)に示すように、被搬送体920は、第1及び第2の搬送体930a,930bとの間に挟まれて位置しており、各電極950,960,970,980に電圧が印加されていない。次に、例えば、第1の可動電極950に正の電圧を印加し、図中左側の第1の可動電極950に対応する第1の固定電極960に負の電圧を印加する。これにより、図33(b)に示すように、第1の搬送体930aが可動中心軸991を中心に左回りに回転する。このとき、被搬送体920の矩形状突起921aと第1の搬送体930aの矩形状突起931とが係合するので、被搬送体920は第1の搬送体930aの回転に伴って左回りに移動する。次に、例えば、第2の可動電極970に正の電圧を印加し、第2の固定電極980に負の電圧を印加する。これにより、図33(c)に示すように、第1の搬送体930aが可動中心軸991とともに図中下方向に移動し、被搬送体920と第1の搬送体930aとの係合が解除される。次に、第1の可動電極950及び第1の固定電極960に印加している電圧を解放する。これにより、弾性体943の復元力によって、第1の搬送体930aが可動中心軸991を中心に右回りに回転する。その後、第2の可動電極970及び第2の固定電極980に印加している電圧を解放する。これにより、弾性体944の復元力によって、可動中心軸991が第2の可動電極970とともに図中上側に移動し、被搬送体920と第1の搬送体930とが再び係合する。このような第1の搬送体930aの2方向への往復運動が繰り返されることによって、被搬送体920は左回りに連続的に回転搬送される。なお、右回りに設計した場合には、被搬送体920を右回りに連続的に回転搬送することも可能である。
【0071】
このような櫛歯型静電マイクロアクチュエータを用いた各種の搬送機構から構成された複合搬送機構を、図20に示した微小化学分析システムと同様に、微小化学分析システムに適用することができる。
【0072】
以下、本発明の第3の実施の形態に係る脈動機構を用いた搬送機構について図面に基づき説明する。この搬送機構1000は、図34に示すように、外周面が滑らかな被搬送体1010と、該被搬送体1010の外周面と接触する壁面1020を設け被搬送体1010の搬送方向に連接した複数の搬送体1030と、被搬送体1010の搬送方向と直交する方向に搬送体1030を駆動により往復移動させる駆動部1040、該駆動部1040の駆動を制御する制御部1050を備え、駆動部1040を駆動することによって被搬送体1030を脈動させて被搬送体1010を搬送方向に連続的に搬送するものである。
【0073】
被搬送体1010は、その上面視が円形や楕円形である滑らかな外周面を備えるものであり、例えば、球形や卵形である。2つの搬送体1030は、被搬送体を挟んで互いに対向して位置し、これら2つの搬送体1030が被搬送体1010の搬送方向に連接しており、これらの搬送体1030によって、その間に挟まれた被搬送体1010が搬送される搬送路が規定されている。搬送体1030は、被搬送体1020の外周面と接触する壁面1020を備え、その中央部付近に駆動部1040が連結され、その端部部分は、連接する搬送体1030の壁面1020の端部と連結されており、変形可能な弾性体からなっている。搬送体1030は、駆動部1040の駆動によって被搬送体1010の搬送方向と直交する方向にその中央部付近が所定の振幅だけ往復運動する。対向して位置する2つの搬送体1030は、駆動部1040の駆動によって被搬送体1010の搬送方向と直交する方向であって互いに逆方向に、所定の振幅だけ往復運動する。すなわち、対向して位置する2つの搬送体1030は、駆動部1040の駆動によって搬送路に向かって内側にともに移動、もしくは搬送路から向かって外側にともに移動する。隣接する搬送体1030は、独立に移動する。このような駆動体1030の往復運動をもたらす駆動部1040としては、静電マイクロアクチュエータ、圧電マイクロアクチュエータ等の数μm程度の振幅をもったリニア往復運動するマイクロアクチュエータを各往復運動に対応して1つずつ設けている。また、静電マイクロモータの回転運動をリニア往復運動に変換してもよい。なお、対向して位置する2つの搬送体1030の往復運動を1つのマイクロアクチュエータにより駆動してもよい。
【0074】
この搬送機構1000の搬送動作について図面に基づき説明する。図35(a)に示すように、その間に被搬送体1010を挟む2つの搬送体1030は、搬送路から向かって外側に移動した状態である。他の搬送体1030は、その間に被搬送体1010が位置することができない状態である。この状態から、図35(b)に示すように、その間に被搬送体1010を挟んでいた2つの搬送体1030が搬送路に向かって内側に移動するともに、搬送方向に隣接する2つの搬送体1030が搬送路から向かって外側に移動する。このとき、被搬送体1010は、挟まれていた搬送体1030から押出され、搬送方向に位置する搬送体1030間に生じた空間に向かって移動する。このように、搬送路が脈動するように搬送体1030の往復運動が連動して行われることによって、被搬送体1010は搬送方向に連続的に搬送される。搬送体1030の配置により、曲線を含めた自在な搬送路を構成することができる。駆動部に櫛歯型静電マイクロアクチュエータを用いた搬送機構1100は、図36に示すように、固定電極1110に対応して設けられた可動電極1120とともに搬送体1030の中央部付近が移動する。
【0075】
本発明の第4の実施の形態に係る搬送機構1200は、図37に示すピストン型のマイクロアクチュエータ1210を、図38に示すように、搬送路1220に沿って複数配列したものである。このピストン型のマイクロアクチュエータ1210は、滑らかな先端形状1211を有し固定柱1212に弾性連結された搬送体1213と、平行な多数の櫛歯を備え搬送体1213に固設された櫛歯状の可動電極1214と、該可動電極1214の櫛歯に対応させた多数の櫛歯を備えた固定電極1215と、各電極1214,1215の電圧を制御する制御部(不図示)を備え、各電極1214,1215の電圧の印加の有無により搬送体1213が線形往復移動するものである。複数のピストン型のマイクロアクチュエータ1210は、図38(a)から図38(e)に示すように、搬送路1220に沿って配列されており、制御部の制御によって、その先端付近に搬送されてきた被搬送体1230を搬送方向に連携して押出し、被搬送体1230を搬送する。
【0076】
本発明の第5の実施の形態に係る搬送機構1300は、図39に示すように、ベルト状の搬送体1310を静電マイクロモータ1320によって周回移動させることにより、搬送体1310に載置された被搬送体1330を搬送するものである。ベルト状の搬送体1310は、2つの静電マイクロモータ1320に掛け渡され、搬送体1310の内側面から内側に向かって設けられた矩形状突起1311と静電マイクロモータ1320の外側面から外側に向かって設けられた矩形状突起1321とが係合することにより、静電マイクロモータ1320の回転に伴って周回移動する。これにより、搬送体1310に載置された被搬送体1330は、搬送体1310が形成する所定の周回搬送経路に沿って搬送される。
【0077】
本発明の第6の実施の形態に係る搬送機構1400は、図40に示すように、ベルト状の搬送体1410を静電マイクロアクチュエータ1420の駆動によって回転する回転体1430を回転させることにより、搬送体1410に載置された被搬送体1440を搬送するものである。ベルト状の搬送体1410は、2つの回転体1430に掛け渡され、搬送体1410の内側面から内側に向かって設けられた矩形状突起1411と回転体1430の外側面から外側に向かって設けられた矩形状突起1431とが係合することにより、回転体1430の回転に伴って周回移動する。回転体1430は、その矩形状突起1431と係合する他の矩形状突起1450が静電マイクロアクチュエータ1420(図30の800を参照。)の駆動による掃出し動作によって、回転する。これにより、搬送体1410に載置された被搬送体1440は、搬送体1410が形成する所定の周回搬送経路に沿って搬送される。
【0078】
本発明の第7の実施の形態に係る搬送機構は、櫛歯型静電マイクロアクチュエータと並行平板型静電マイクロアクチュエータとを組み合わせて駆動することにより、被搬送体を搬送するものである。この搬送機構1500は、図41(a)に示す状態から、櫛歯型静電マイクロアクチュエータの可動電極1510が電圧の印加の有無によって図中の上下方向に移動すると、可動電極1510に固設された中間体1520が上下方向に移動する。中間体1520が上下方向の移動すると、この中間体1520の両側面に設けられた矩形状突起1521と係合する矩形状突起1531を側面に設けた搬送体1530が上下方向に移動する。この搬送体1530は、並行平板型静電マイクロアクチュエータの可動電極でもあり、この可動電極に対応して図示しない固定電極が設けられている。これらの電極に電圧が印加されていない状態で、図41(b)に示すように、搬送体1530の他の側面に設けられた矩形状突起1532と係合する矩形状突起1541を側面に設けた被搬送体1540が、規定されたレール1550上を上下方向に移動する。その後、並行平板型静電マイクロアクチュエータの各電極に電圧を印加し、並行平板型静電マイクロアクチュエータの可動電極、すなわち搬送体1530が図中紙面に直交する方向に移動することにより、被搬送体1540と搬送体1530との係合、及び搬送体1530と中間体1520との係合が解除される。このように、被搬送体1540は、レール1550上を図中上下方向の搬送方向に連続して搬送される。
【図面の簡単な説明】
【0079】
【図1】本発明に係る搬送機構を示す構成図である。
【図2】本発明の第1の実施の形態に係るラチェット機構を用いた直線搬送機構を示す構成図である。
【図3】(a)及び(b)は、ラチェット機構を用いた直線搬送機構に係る逃し部の形態をそれぞれ示す図である。
【図4】(a)及び(b)は、ラチェット機構を用いた直線搬送機構に係る逃し部の形態をそれぞれ示す図である。
【図5】(a)から(c)は、図2に示した直線搬送機構の搬送動作を説明する図である。
【図6】(a)から(c)は、ラチェット機構を用いた別の直線搬送機構の搬送動作を説明する図である。
【図7】(a)から(c)は、図2に示した搬送体を搬送方向に連続して設けた直線搬送機構の搬送動作を説明する図である。
【図8】(a)及び(b)は、搬送体を搬送方向に連続して設けたそれぞれ別の直線搬送機構の搬送動作を説明する図である。
【図9】(a)から(c)は、本発明の第1の実施の形態に係るラチェット機構を用いた回転搬送機構の搬送動作を説明する図である。
【図10】(a)から(c)は、本発明の第1の実施の形態に係るラチェット機構を用いた分岐搬送機構の搬送動作を説明する図である。
【図11】ラチェット機構を用いた複合搬送機構を説明する図である。
【図12】ラチェット機構において、駆動部に櫛歯型静電マイクロアクチュエータを用いた直線搬送機構を説明する図である。
【図13】(a)から(c)は、図12に示した直線搬送機構の搬送動作を説明する図である。
【図14】(a)及び(b)は、ラチェット機構において、駆動部に櫛歯型静電マイクロアクチュエータを用いた回転搬送機構を説明する図である。
【図15】(a)及び(b)は、本発明の第1の実施の形態に係るラチェット機構において、駆動部に櫛歯型静電マイクロアクチュエータを用いた別の回転搬送機構をそれぞれ説明する図である。
【図16】(a)及び(b)は、ラチェット機構において、駆動部に櫛歯型静電マイクロアクチュエータを用いたさらに別の回転搬送機構をそれぞれ説明する図である。
【図17】ラチェット機構において、駆動部に櫛歯型静電マイクロアクチュエータを用いたさらに別の回転搬送機構を説明する図である。
【図18】ラチェット機構において、駆動部に櫛歯型静電マイクロアクチュエータを用いたさらに別の回転搬送機構を説明する図である。
【図19】(a)及び(b)は、本発明の第1の実施の形態に係るラチェット機構において、駆動部に櫛歯型静電マイクロアクチュエータを用いた分岐搬送機構の搬送動作を説明する図である。
【図20】ラチェット機構において、駆動部に櫛歯型静電マイクロアクチュエータを用いた複合搬送機構を適用した微小化学分析システムの実施例を示す図である。
【図21】図20における試料搬送車を示す図である。
【図22】(a)及び(b)は、試料搬送車の変形例をそれぞれ示す図である。
【図23】(a)及び(b)は、試料搬送車を連結した例をそれぞれ示す図である。
【図24】試料搬送車を連接した例を示す図である。
【図25】本発明の第2の実施の形態に係る掃出し機構を用いた直線搬送機構を示す構成図である。
【図26】(a)から(d)は、図25に示した直線搬送機構の搬送動作を説明する説明図である。
【図27】(a)から(c)は、掃出し機構を用いた別の直線搬送機構を示す図である
【図28】(a)から(d)は、本発明の第1の実施の形態に係る掃出し機構を用いた回転搬送機構の搬送動作を説明する図である。
【図29】掃出し機構を用いた複合搬送機構を説明する図である。
【図30】掃出し機構において、駆動部に櫛歯型静電マイクロアクチュエータを用いた直線搬送機構を説明する図である。
【図31】(a)から(d)は、図30に示した直線搬送機構の搬送動作を説明する説明図である。
【図32】掃出し機構において、駆動部に櫛歯型静電マイクロアクチュエータを用いた回転搬送機構を説明する図である。
【図33】(a)から(c)は、図32に示した回転搬送機構の搬送動作を説明する図である。
【図34】本発明の第3の実施の形態に係る脈動機構を用いた搬送機構を示す構成図である。
【図35】(a)及び(b)は、図34に示した搬送機構の搬送動作を説明する図である。
【図36】脈動機構において、駆動部に櫛歯型静電マイクロアクチュエータを用いた搬送機構を説明する図である。
【図37】本発明の第4の実施の形態に係る搬送機構に用いるピストン型のマイクロアクチュエータを説明する図である。
【図38】図37に示したピストン型のマイクロアクチュエータを用いた搬送機構を説明する図である。
【図39】本発明の第5の実施の形態に係る搬送機構を説明する図である。
【図40】本発明の第6の実施の形態に係る搬送機構を説明する図である。
【図41】本発明の第7の実施の形態に係る搬送機構を説明する図である。
【符号の説明】
【0080】
1、530、1000、1100、1200、1300、1400、1500 搬送機構
2、20、120、220、320、372、382、410、620、720、820、920、1010、1213、1330、1440、1540 被搬送体
3 搬送路
4、30、130、230、330、373、375、385、630、730、830、930、1030、1310、1410、1530 搬送体
5、40、640、1040 駆動部
6、50、650、1050 制御部
10、10´、60、200、600、800 直線搬送機構(搬送機構)
21、31、121、131、221、231、321、371、376、381、383 鋸歯
100、300、370、380、700、900 回転搬送機構(搬送機構)
140、400、760 分岐搬送機構(搬送機構)
160、750 複合搬送機構(搬送機構)
500 微小化学分析システム
510、510´ 、540試料搬送車(被搬送体)
530a 直線搬送ブロック
530b 分岐搬送ブロック(分岐路を有するブロック)
530c 曲線搬送ブロック
621、631、721、731、821、831、921,931、1311、1321、1521、1531、1541 矩形状突起(突起)
1020 壁面
【特許請求の範囲】
【請求項1】
所定の搬送方向に搬送される被搬送体と、
前記搬送方向に移動するときは前記被搬送体と係合し、前記搬送方向と反対方向に移動するときは前記被搬送体との係合が解除される搬送体と、
駆動により前記搬送方向及びその反対方向に前記搬送体を往復移動させる駆動部
を備えることを特徴とする搬送機構。
【請求項2】
所定の搬送方向に搬送され、鋸歯を設けた被搬送体と、
前記搬送方向に移動するときは前記被搬送体の鋸歯と係合し、前記搬送方向と反対方向に移動するときは前記被搬送体の鋸歯と滑り合う鋸歯を設けた搬送体と、
駆動により前記搬送方向及びその反対方向に前記搬送体を往復移動させる駆動部
を備えることを特徴とする搬送機構。
【請求項3】
所定の搬送方向に搬送される被搬送体と、
前記搬送方向に移動するときは前記被搬送体と係合し、前記搬送方向と反対方向に移動するときは前記被搬送体から離れる方向に移動することにより前記被搬送体との係合を解除する搬送体と、
駆動により前記搬送方向及びその反対方向に前記搬送体を往復移動させる駆動部
を備えることを特徴とする搬送機構。
【請求項4】
前記搬送体を、前記被搬送体が搬送される搬送路に沿って連続して設けたことを特徴とする請求項1から3の何れか1項に記載の搬送機構。
【請求項5】
所定の搬送方向に搬送される被搬送体と、
前記被搬送体がその間を搬送される対向する壁面を備え、前記搬送方向に連続して設けられた複数の搬送体と、
駆動により、前記壁面の間の距離が前記被搬送体の幅を超える位置、及び前記壁面の間の距離が前記被搬送体の幅以下となる位置に前記壁面が位置するように、前記搬送体を往復移動させる駆動部
を備えることを特徴とする搬送機構。
【請求項6】
前記被搬送体が搬送される方向に分岐路を設け、前記分岐路の入り口に壁面の間の距離を制御する部材を設け、前記制御部材の位置を変えることにより、前記搬送体の幅を超える幅の分岐路に前記搬送体を移動させるように構成したことを特徴とする請求項1から5の何れか1項に記載の搬送機構。
【請求項7】
前記分岐路を有するブロックと、
前記搬送方向を一定として前記被搬送体が搬送されるように、請求項1から5の何れか1項に記載の搬送機構によって構成された直線搬送ブロックと、
前記搬送方向を変化させながら前記被搬送体が搬送されるように、請求項1から5の何れか1項に記載の搬送機構によって構成された曲線搬送ブロックのうち、
いずれか2以上の前記ブロックを組み合わせて構成したことを特徴とする搬送機構。
【請求項8】
液滴又は微小固形物を載置する前記被搬送体を、請求項1から7の何れか1項に記載の搬送機構によって搬送することを特徴とする微小化学分析システム。
【請求項1】
所定の搬送方向に搬送される被搬送体と、
前記搬送方向に移動するときは前記被搬送体と係合し、前記搬送方向と反対方向に移動するときは前記被搬送体との係合が解除される搬送体と、
駆動により前記搬送方向及びその反対方向に前記搬送体を往復移動させる駆動部
を備えることを特徴とする搬送機構。
【請求項2】
所定の搬送方向に搬送され、鋸歯を設けた被搬送体と、
前記搬送方向に移動するときは前記被搬送体の鋸歯と係合し、前記搬送方向と反対方向に移動するときは前記被搬送体の鋸歯と滑り合う鋸歯を設けた搬送体と、
駆動により前記搬送方向及びその反対方向に前記搬送体を往復移動させる駆動部
を備えることを特徴とする搬送機構。
【請求項3】
所定の搬送方向に搬送される被搬送体と、
前記搬送方向に移動するときは前記被搬送体と係合し、前記搬送方向と反対方向に移動するときは前記被搬送体から離れる方向に移動することにより前記被搬送体との係合を解除する搬送体と、
駆動により前記搬送方向及びその反対方向に前記搬送体を往復移動させる駆動部
を備えることを特徴とする搬送機構。
【請求項4】
前記搬送体を、前記被搬送体が搬送される搬送路に沿って連続して設けたことを特徴とする請求項1から3の何れか1項に記載の搬送機構。
【請求項5】
所定の搬送方向に搬送される被搬送体と、
前記被搬送体がその間を搬送される対向する壁面を備え、前記搬送方向に連続して設けられた複数の搬送体と、
駆動により、前記壁面の間の距離が前記被搬送体の幅を超える位置、及び前記壁面の間の距離が前記被搬送体の幅以下となる位置に前記壁面が位置するように、前記搬送体を往復移動させる駆動部
を備えることを特徴とする搬送機構。
【請求項6】
前記被搬送体が搬送される方向に分岐路を設け、前記分岐路の入り口に壁面の間の距離を制御する部材を設け、前記制御部材の位置を変えることにより、前記搬送体の幅を超える幅の分岐路に前記搬送体を移動させるように構成したことを特徴とする請求項1から5の何れか1項に記載の搬送機構。
【請求項7】
前記分岐路を有するブロックと、
前記搬送方向を一定として前記被搬送体が搬送されるように、請求項1から5の何れか1項に記載の搬送機構によって構成された直線搬送ブロックと、
前記搬送方向を変化させながら前記被搬送体が搬送されるように、請求項1から5の何れか1項に記載の搬送機構によって構成された曲線搬送ブロックのうち、
いずれか2以上の前記ブロックを組み合わせて構成したことを特徴とする搬送機構。
【請求項8】
液滴又は微小固形物を載置する前記被搬送体を、請求項1から7の何れか1項に記載の搬送機構によって搬送することを特徴とする微小化学分析システム。
【図1】


【図2】
【図3】

【図4】
【図5】

【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】

【図15】
【図16】

【図17】
【図18】

【図19】
【図20】

【図21】
【図22】
【図23】

【図24】
【図25】
【図26】
【図27】

【図28】

【図29】

【図30】

【図31】

【図32】
【図33】
【図34】
【図35】
【図36】
【図37】

【図38】
【図39】
【図40】
【図41】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【公開番号】特開2006−125886(P2006−125886A)
【公開日】平成18年5月18日(2006.5.18)
【国際特許分類】
【出願番号】特願2004−311441(P2004−311441)
【出願日】平成16年10月26日(2004.10.26)
【出願人】(593006630)学校法人立命館 (359)
【出願人】(390002473)TOWA株式会社 (192)
【Fターム(参考)】
【公開日】平成18年5月18日(2006.5.18)
【国際特許分類】
【出願日】平成16年10月26日(2004.10.26)
【出願人】(593006630)学校法人立命館 (359)
【出願人】(390002473)TOWA株式会社 (192)
【Fターム(参考)】
[ Back to top ]