
搬送装置、作業システム、および搬送方法
【課題】階段等の昇降設備の使用が困難な場合であっても、作業機械を上階フロアへ確実かつ短時間に投入可能とする搬送装置、作業システムおよび搬送方法を提供する。
【解決手段】本発明の一実施形態は、建物2内で作業する作業ロボット11と、作業ロボット11を遠隔で制御する制御装置12と、建物2の上階への吹抜においてフロア3と上階フロア4との間を昇降し、かつ搭載された搭載物を平行移動させる移動装置を有する架台43と、架台43上で移動装置により平行移動されて上階フロア4または上階フロア4の構造物6に接触することにより固定される固定部15bと、作業ロボット11の通路を形成する通路部15aとを有する渡板15とを備えた。
【解決手段】本発明の一実施形態は、建物2内で作業する作業ロボット11と、作業ロボット11を遠隔で制御する制御装置12と、建物2の上階への吹抜においてフロア3と上階フロア4との間を昇降し、かつ搭載された搭載物を平行移動させる移動装置を有する架台43と、架台43上で移動装置により平行移動されて上階フロア4または上階フロア4の構造物6に接触することにより固定される固定部15bと、作業ロボット11の通路を形成する通路部15aとを有する渡板15とを備えた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、無人作業ロボット等の作業機械を上階フロアへ移動させる搬送装置、この搬送装置を用いた作業システム、および搬送方法に関する。
【背景技術】
【0002】
人による状況把握が困難な建物内(例えば、事故事象により放射線量が高い原子力発電プラント建屋や化学物質が飛散した化学プラント等)においては、無人ロボットや無人ビークル等の作業機械により建物の環境モニタリングや作業が行われる。このロボットは、フロア内を水平移動したり、フロア間を昇降したりして所要の作業を実施する。
【0003】
作業機械をフロア間で昇降させる場合、建屋に設置された階段やエレベータが用いられる。従来、階段等の建屋環境の移動が可能な移動作業ロボットが知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−264061号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、作業機械に階段を昇降する機構を設けると装置の複雑化や大型化に繋がる。また、作業環境が何らかの事故事象が発生した建屋の場合、瓦礫等により階段の使用不能や、電源系統の喪失、エレベータの故障等によりエレベータが使用できない場合が想定され得る。そこで、建屋の各フロアが外に面している場合や、建屋内部に吹き抜けがある場合は、これらをアクセスルートとして作業機械を送り込むことが考えられる。この場合、作業機械を複数回投入する場合、複数種類の作業機械を投入する場合、および複数フロアへ作業機械を投入する場合等、状況よっては作業機械の投入回数が多くなることが考えられる。また、投入に付随する回収作業も増加する。したがって、作業機械の投入及び回収作業の確実化、短時間化が求められる。
また、作業機械を地階から移動させる場合、移動開始位置から到達目的位置までの移動距離が長くなり、ロボットから延びるケーブル長が不足する場合がある。また、ロボットが、ケーブル牽引重量に耐えられない場合も起こりうる。
【0006】
本発明はこのような事情を考慮してなされたもので、階段等の昇降設備を使用せずに短時間で作業機械を上階フロアへアクセスさせることができる搬送装置、作業システムおよび搬送方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の各実施形態に係る搬送装置は、建物の複数階層を貫通する吹抜または外に面した上階フロアへ、この上階フロアよりも下層の下階フロアから搭載物を搬送する搬送装置であって、前記下階フロアと前記上階フロアとの間を昇降し、かつ搭載された搭載物を平行移動させる移動装置を有する架台と、前記架台上で前記移動装置により平行移動されて前記上階フロアまたは前記上階フロアの構造物に接触することにより固定される固定部と、通路を形成する通路部とを有し、前記搭載物としての渡板とを備えることを特徴とする。
【発明の効果】
【0008】
本発明の各実施形態に係る搬送装置、作業システムおよび搬送方法によれば、作業機械を上階フロアへアクセスさせる作業を短時間化することができる。
【図面の簡単な説明】
【0009】
【図1】本発明に係る搬送装置および作業システムの第1実施形態を示す構成図。
【図2】渡板を上階フロアに設置する際の作業ロボット搬送システムの動作の説明図。
【図3】ロボットを架台に搭載する際の作業ロボット搬送システムの動作の説明図。
【図4】ロボットを上階フロアに設置する際の作業ロボット搬送システムの動作の説明図。
【図5】手摺がない上階フロアに渡板を設置する際の作業ロボット搬送システムの動作の説明図。
【図6】本発明に係る搬送装置および作業システムの第2実施形態を示す構成図。
【発明を実施するための形態】
【0010】
[第1実施形態]
本発明に係る搬送装置、作業システムおよび搬送方法の第1実施形態を添付図面に基づいて説明する。なお、各実施形態においては、原子力発電プラントの原子炉建屋内部に作業ロボットを送り込むものとして説明する。
【0011】
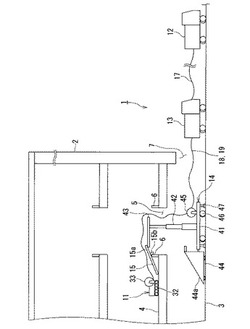
図1は、本発明に係る搬送装置および作業システムの第1実施形態を示す構成図である。
【0012】
作業システムとしての作業ロボット搬送システム1は、建物内外を通行可能な出入口7を有するフロア3(下階フロア)と、このフロア3に対して数m〜数十m(例えば、40m前後)の高さを有する上階フロア4とを有する建物2に使用される。建物2は、フロア3から上階フロア4へ抜ける吹抜5を有する。吹抜5が形成される上階フロア4の縁周辺には、手摺6が設けられる。
【0013】
作業ロボット搬送システム1は、例えば原子力発電プラントの建物内における人による状況把握が困難な箇所に、作業ロボット(ロボット)11を移動させるための装置であり、特に上階フロア4にロボットを上昇させるために使用される装置である。
【0014】
作業ロボット搬送システム1は、制御車両12、中継車両13、ロボット11、搬送装置としての揚重機14、渡板15を主に備える。
【0015】
制御車両12は、制御装置とメディアコンバータとを有する。制御装置は、ロボット11に対して制御信号を送信し、ロボット11の各部を遠隔で制御する。メディアコンバータは、制御信号(電気信号)を光信号に変換する。制御車両12は、光ケーブル17を介して中継車両13と接続され、制御信号を中継車両13に送信する。
【0016】
中継車両13は、発電機とメディアコンバータとを有する。メディアコンバータは、光信号と電気信号とを変換する。発電機は、ロボット11に供給する電源を発電する。中継車両13は、通信ケーブル18および電源ケーブル19を介してロボット11に接続され、電気信号および電源をロボット11に供給する。
【0017】
ロボット11は、作業用機器、走行車輪32、ケーブル巻取装置33を主に備える。作業用機器は、カメラ、線量計等であり、建物内で環境モニタリング等の所要の作業を行う。走行車輪32は、遠隔操作により駆動し、ロボット11をフロア上で走行させる。ケーブル巻取装置33は、通信ケーブル18および電源ケーブル19を巻き取る。
【0018】
揚重機14は、基台41、伸縮マスト42、架台43、スロープ台44およびケーブル巻取装置45を備える。基台41は、走行車輪46およびアウトリガー47を有する。揚重機14は、移動時には走行車輪46でフロア上を走行し移動し、停止時にはアウトリガー47でフロア上に固定される。伸縮マスト42は、基台41に対して垂直上方向に設けられ、上下方向に伸縮する。
【0019】
架台43は、伸縮マスト42上に水平に設けられ、伸縮マスト42の伸縮に応じてフロア3と上階フロア4との間を昇降する。架台43の表面上には、ベルトコンベア48が取り外し可能に配置される(図2参照)。ベルトコンベア48は、架台43に搭載された渡板15(搭載物)を平行移動させる。なお、ベルトコンベア48は、常時架台43に固定されてもよい。
【0020】
スロープ台44は、フロア3と架台43とをつなげる傾斜を有するスロープ面44aを有する。スロープ台44は、基台41と連結され、かつ車輪を有することにより、揚重機14の走行に追従する。
【0021】
なお、走行車輪46、伸縮マスト42およびベルトコンベア48は、作業員の操作に基づいて適宜動作する。
【0022】
渡板15は、平面板15aおよび突起15bを有する。平面板15aは、ロボット11が走行可能な大きさを有する。平面板15aは、作業ロボットの通路を形成する通路部として機能する。突起15bは、平面板15aのロボット11の走行面とは逆面に、平面板15aに対してほぼ垂直に突出して設けられる。突起15bは、上階フロア4の手摺6(構造物)に接触して固定される固定部として機能する。突起15bは、手摺6に対して吹抜5側から接触し支持されればよく、突起15bの形状はこれに限らない。
【0023】
次に、第1実施形態における作業ロボット搬送システム1の作用について説明する。
【0024】
まず、揚重機14を建物2内に移動する作業が行われる。
【0025】
揚重機14は、作業員により出入口7から建物2内に移動される。このとき、中継車両13は建物2外に配置され、制御車両12は、中継車両13からさらに離れた建物2外に設置される。なお、ケーブル巻取装置45は、揚重機14がスムーズに移動できるように必要に応じて不要なケーブル18、19を巻き取ったり、開放したりする。
【0026】
揚重機14は、吹抜5の下へ移動すると、アウトリガー47により固定されて設置される。このとき、伸縮マスト42は収縮した状態である。架台43上には、ベルトコンベア48が積載され、ベルトコンベア48上には渡板15が積載される。なお、ベルトコンベア48および渡板15は、建物2外で架台43に積載されても、建物2内で積載されてもよい。
【0027】
次に、渡板15を上階フロア4に設置するための作業が行われる。
【0028】
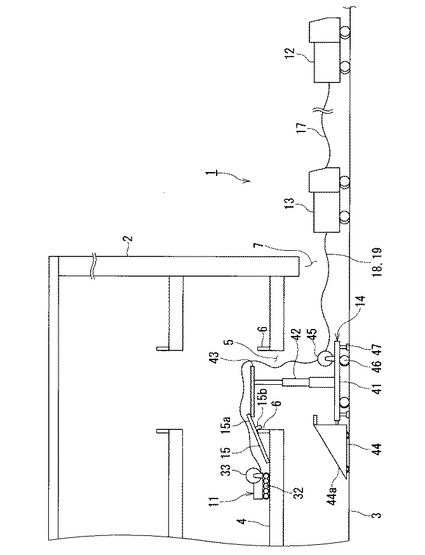
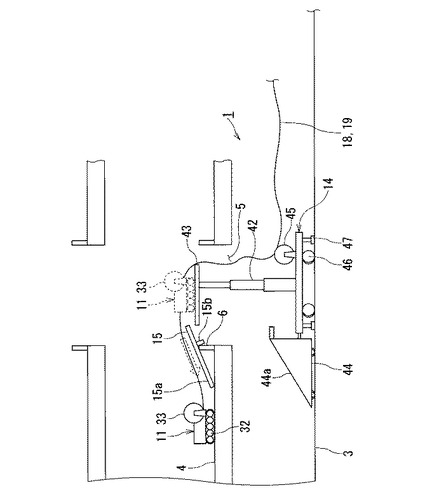
図2は、渡板15を上階フロア4に設置する際の作業ロボット搬送システム1(搬送装置)の動作の説明図である。
【0029】
伸縮マスト42は、架台43が上階フロア4の手摺6の高さを超える高さであって、突起15bの端部が手摺6の高さを超えない高さまで伸長する。
【0030】
ベルトコンベア48は、作業員の操作に基づいて駆動し、渡板15を架台43から上階フロア4に向かって平行移動させる。渡板15は、傾斜しながら上階フロア4に向かって落下し、突起15bと手摺6とを接触させる。渡板15は、突起15bと手摺6との引っ掛かりにより、手摺6と上階フロア4とに支持されてロボット11の通路をスロープ状に形成する。
【0031】
伸縮マスト42は、渡板15を上階フロア4に設置すると、再びスロープ台44の高さとほぼ同じ高さまで収縮する。
【0032】
次に、ロボット11を上階フロア4に設置するための作業が行われる。
【0033】
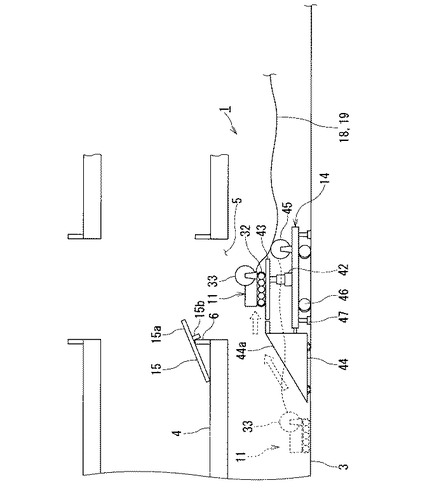
図3は、ロボット11を架台43に搭載する際の作業ロボット搬送システム1(搬送装置)の動作の説明図である。
【0034】
図4は、ロボット11を上階フロア4に設置する際の作業ロボット搬送システム1の動作の説明図である。
【0035】
ロボット11は、制御車両12の制御装置の制御に基づいて、スロープ台44のスロープ面44aを走行し、架台43まで移動する。なお、ケーブル巻取装置33は、ロボット11がスムーズに移動できるように必要に応じて不要なケーブル18、19を巻き取ったり、開放したりする。
【0036】
なお、ロボット11は、渡板15の設置作業終了後に中継車両13等と接続されてもよいし、揚重機14の建物2への移動と共に建物2内に移動してもよい。また、渡板15の設置作業時に利用されたベルトコンベア48は、設置された状態でもよいし、取り外された状態でもよい。
【0037】
伸縮マスト42は、架台43と渡板15とが接触する高さまで伸長する。ロボット11は、制御装置の制御に基づいて走行車輪32を駆動し、スロープ状の渡板15の平面板15aを通り上階フロア4に移動する。
【0038】
ロボット11は、作業用機器により上階フロア4を含めた建物2内の環境モニタリング等の所要の作業を実施する。
【0039】
この作業ロボット搬送システム1は、人による状況把握が困難な建物2内において、階段等の上階フロア4への昇降設備の使用リスクが高い場合、すなわち、階段等の使用が移動距離やケーブル長やケーブル重量の問題が存在する場合であっても、ロボット11を上階フロア4へスムーズに移動させることができる。
【0040】
また、作業ロボット搬送システム1は搭載した渡板15を上階フロア4の端部に落下させるだけで設置することができるため、架台43の床を延伸させる、または高精度に近接・接触させる等して上階フロア4と連絡する動作が不要であり、渡板15を設置した後は、架台43を渡板15に近接させるだけでロボット11の投入・回収が可能となる。このため、簡素な機構でロボット11の投入・回収作業を確実かつ短時間で行うことが可能となる。
【0041】
なお、作業ロボット搬送システム1は、上階フロア4に手摺6がない場合についても、同様にロボット11を上階フロア4に移動させることができる。
【0042】
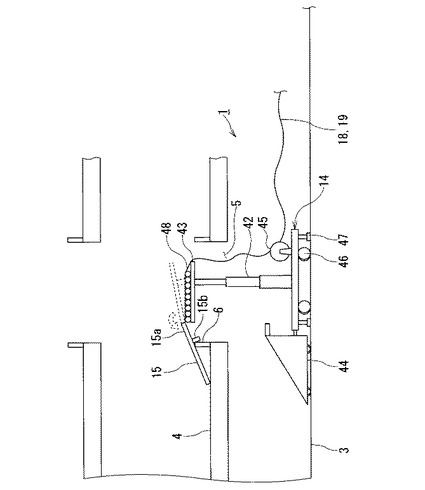
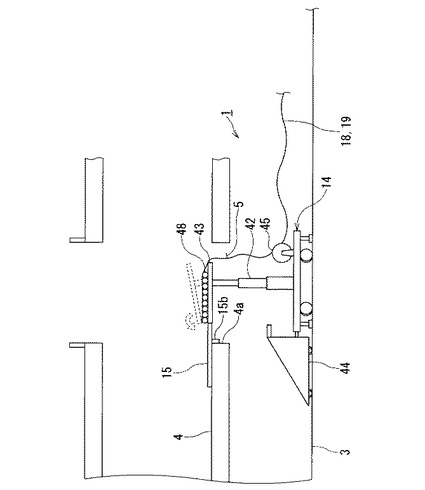
図5は、手摺がない上階フロア4に渡板15を設置する際の作業ロボット搬送システム1(搬送装置)の動作の説明図である。
【0043】
伸縮マスト42は、架台43が上階フロア4の高さとほぼ同じ高さまで伸長する。ベルトコンベア48は、作業員の操作に基づいて駆動し、渡板15を架台43から上階フロア4に向かって、上階フロア4と平行に移動させる。すると、突起15bは上階フロア4の高さ方向の面4a(上階フロア4の構造物)と接触し、渡板15は上階フロア4上で固定される。
【0044】
伸縮マスト42は、渡板15を上階フロア4に設置すると、再びスロープ台44の高さとほぼ同じ高さまで収縮する。
【0045】
ロボット11を上階フロア4に設置する作業については、渡板15が上階フロア4に対して平行に設置される点以外は、図3および図4で説明した作業とほぼ同様であるため、説明を省略する。
【0046】
このように、第1実施形態における作業ロボット搬送システム1は、上階フロア4の吹抜5の手摺6の有無に影響されることなく、ロボット11を上階フロア4に移動させることができる。
【0047】
また、架台43に手摺を撤去するための工作装置(例えばレーザー切断装置)を設置してもよい。大破した手摺6の残骸がある場合や、手摺6が破損していたり元々の強度的にロボットおよび渡板15の重量に耐えられない場合、あるいは渡板15の設置に適さない障害物(瓦礫、格子状に配置された柱、ガラス等)が存在する場合、工作装置により手摺または障害物を撤去後、渡板15を設置する。これにより、ロボット11のアクセスルートを確実に確保することが可能である。
【0048】
[第2実施形態]
本発明に係る搬送装置、作業システムおよび搬送方法の第2実施形態を添付図面に基づいて説明する。
【0049】
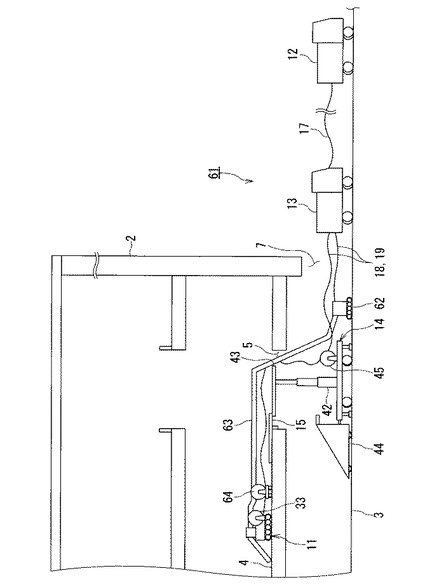
図6は、本発明に係る搬送装置および作業システムの第2実施形態を示す構成図である。
【0050】
第2実施形態における作業ロボット搬送システム61が、第1実施形態の作業ロボット搬送システム1と異なる点は、建物2内の汚染物を回収するための排気装置62および排気ホース63が新たに設けられた点である。その他の構成については、第1実施形態とほぼ同様であるため、第1実施形態と対応する構成および部分については同一の符号を付し、重複する説明を省略する。
【0051】
排気装置62は、フィルターを備える汚染物回収用の遮蔽ボックスを搭載する。排気装置62は、排気ホース63の一端と接続されている。排気装置62は、揚重機14と同フロアに設置される。排気装置62は、ロボット11と同様に、通信ケーブル18および電源ケーブル19を介して中継車両13と接続され、遠隔操作される。
【0052】
ロボット11は、排気ホース63の先端を保持し(先端と接続され)、ロボット11の移動と共に上階フロア4等の周囲環境の汚染物(ダスト等)を回収する。ロボット11の近傍には、排気ホース巻取装置64が配置される。排気ホース巻取装置64は、例えばロボット11と共に移動可能に構成され、ロボット11がスムーズに移動できるように必要に応じて不要な排気ホース63を巻き取ったり、開放したりする。
【0053】
この作業ロボット搬送システム61によれば、第1実施形態で奏する効果に加え、例えば事故発生等により高線量の汚染物が存在し、上階フロア4に人が入れないような場合であっても、排気装置62および排気ホース63で汚染物を回収することができる点で有効である。
【0054】
また、作業ロボット搬送システム1は、階段を用いることなくロボット11や排気ホース63を上階に移動させることができるため、排気ホース63のような一定の太さを有するようなものであっても、短い距離で上階まで移動させることができる点でも有効である。
【0055】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【0056】
例えば、ロボット11は、バッテリ駆動とすることにより電源ケーブル19を省略してもよい。また、ロボット11は、通常時においてはバッテリ駆動とし、非常時においては中継車両13から電源ケーブルを介して供給される電源で駆動するようにしてもよい。揚重機14および排気装置62の電源についても同様である。
【0057】
また、揚重機14は、ロボット11と同様に、制御車両12の制御装置で遠隔操作されてもよい。ロボット11または揚重機14に無線モジュールを搭載し、制御装置からの制御信号を無線で受信してもよい。
また、各実施形態では建物2に吹抜5があるものとして説明したが、例えばフロアの一部が外に面している場合(例えば、上階フロア4にバルコニーが設けられている場合やフロアの外壁が一部損なわれている場合)は、そこに揚重機14を用いてアクセスするものとしてもよい。
また、渡板15の突起15bは、手摺6あるいは上階フロア4と接触して渡板15の位置決め手段として機能すればよく、渡板15は自身の重量で上階フロア4に安定して設置され、作業ロボット1の通過時は渡板15の吹抜側端部が架台43によって支持されるが、渡板15を確実に固定設置するため、突起15bを機械的要素あるいは磁気的要素で手摺6や上階フロア4に固定するものとしてもよい。例えば、機械的要素として手摺6と係合するフック、係合した状態でロックするナス環フック、上階フロア4の床を挟み込む構造、吸盤や粘着材等で吸着する構造とすることが可能である。また、磁気的要素としては、手摺6や上階フロア4が磁性体であれば突起15bに磁石を取り付ければよい。
【符号の説明】
【0058】
1、61 作業ロボット搬送システム
2 建物
3 フロア
4 上階フロア
5 吹抜
6 手摺
11 作業ロボット(ロボット)
12 制御車両
13 中継車両
14 揚重機
15 渡板
17 光ケーブル
18 通信ケーブル
19 電源ケーブル
33 ケーブル巻取装置
42 伸縮マスト
43 架台
44 スロープ台
45 ケーブル巻取装置
62 排気装置
63 排気ホース
64 排気ホース巻取装置
【技術分野】
【0001】
本発明は、無人作業ロボット等の作業機械を上階フロアへ移動させる搬送装置、この搬送装置を用いた作業システム、および搬送方法に関する。
【背景技術】
【0002】
人による状況把握が困難な建物内(例えば、事故事象により放射線量が高い原子力発電プラント建屋や化学物質が飛散した化学プラント等)においては、無人ロボットや無人ビークル等の作業機械により建物の環境モニタリングや作業が行われる。このロボットは、フロア内を水平移動したり、フロア間を昇降したりして所要の作業を実施する。
【0003】
作業機械をフロア間で昇降させる場合、建屋に設置された階段やエレベータが用いられる。従来、階段等の建屋環境の移動が可能な移動作業ロボットが知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−264061号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、作業機械に階段を昇降する機構を設けると装置の複雑化や大型化に繋がる。また、作業環境が何らかの事故事象が発生した建屋の場合、瓦礫等により階段の使用不能や、電源系統の喪失、エレベータの故障等によりエレベータが使用できない場合が想定され得る。そこで、建屋の各フロアが外に面している場合や、建屋内部に吹き抜けがある場合は、これらをアクセスルートとして作業機械を送り込むことが考えられる。この場合、作業機械を複数回投入する場合、複数種類の作業機械を投入する場合、および複数フロアへ作業機械を投入する場合等、状況よっては作業機械の投入回数が多くなることが考えられる。また、投入に付随する回収作業も増加する。したがって、作業機械の投入及び回収作業の確実化、短時間化が求められる。
また、作業機械を地階から移動させる場合、移動開始位置から到達目的位置までの移動距離が長くなり、ロボットから延びるケーブル長が不足する場合がある。また、ロボットが、ケーブル牽引重量に耐えられない場合も起こりうる。
【0006】
本発明はこのような事情を考慮してなされたもので、階段等の昇降設備を使用せずに短時間で作業機械を上階フロアへアクセスさせることができる搬送装置、作業システムおよび搬送方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の各実施形態に係る搬送装置は、建物の複数階層を貫通する吹抜または外に面した上階フロアへ、この上階フロアよりも下層の下階フロアから搭載物を搬送する搬送装置であって、前記下階フロアと前記上階フロアとの間を昇降し、かつ搭載された搭載物を平行移動させる移動装置を有する架台と、前記架台上で前記移動装置により平行移動されて前記上階フロアまたは前記上階フロアの構造物に接触することにより固定される固定部と、通路を形成する通路部とを有し、前記搭載物としての渡板とを備えることを特徴とする。
【発明の効果】
【0008】
本発明の各実施形態に係る搬送装置、作業システムおよび搬送方法によれば、作業機械を上階フロアへアクセスさせる作業を短時間化することができる。
【図面の簡単な説明】
【0009】
【図1】本発明に係る搬送装置および作業システムの第1実施形態を示す構成図。
【図2】渡板を上階フロアに設置する際の作業ロボット搬送システムの動作の説明図。
【図3】ロボットを架台に搭載する際の作業ロボット搬送システムの動作の説明図。
【図4】ロボットを上階フロアに設置する際の作業ロボット搬送システムの動作の説明図。
【図5】手摺がない上階フロアに渡板を設置する際の作業ロボット搬送システムの動作の説明図。
【図6】本発明に係る搬送装置および作業システムの第2実施形態を示す構成図。
【発明を実施するための形態】
【0010】
[第1実施形態]
本発明に係る搬送装置、作業システムおよび搬送方法の第1実施形態を添付図面に基づいて説明する。なお、各実施形態においては、原子力発電プラントの原子炉建屋内部に作業ロボットを送り込むものとして説明する。
【0011】
図1は、本発明に係る搬送装置および作業システムの第1実施形態を示す構成図である。
【0012】
作業システムとしての作業ロボット搬送システム1は、建物内外を通行可能な出入口7を有するフロア3(下階フロア)と、このフロア3に対して数m〜数十m(例えば、40m前後)の高さを有する上階フロア4とを有する建物2に使用される。建物2は、フロア3から上階フロア4へ抜ける吹抜5を有する。吹抜5が形成される上階フロア4の縁周辺には、手摺6が設けられる。
【0013】
作業ロボット搬送システム1は、例えば原子力発電プラントの建物内における人による状況把握が困難な箇所に、作業ロボット(ロボット)11を移動させるための装置であり、特に上階フロア4にロボットを上昇させるために使用される装置である。
【0014】
作業ロボット搬送システム1は、制御車両12、中継車両13、ロボット11、搬送装置としての揚重機14、渡板15を主に備える。
【0015】
制御車両12は、制御装置とメディアコンバータとを有する。制御装置は、ロボット11に対して制御信号を送信し、ロボット11の各部を遠隔で制御する。メディアコンバータは、制御信号(電気信号)を光信号に変換する。制御車両12は、光ケーブル17を介して中継車両13と接続され、制御信号を中継車両13に送信する。
【0016】
中継車両13は、発電機とメディアコンバータとを有する。メディアコンバータは、光信号と電気信号とを変換する。発電機は、ロボット11に供給する電源を発電する。中継車両13は、通信ケーブル18および電源ケーブル19を介してロボット11に接続され、電気信号および電源をロボット11に供給する。
【0017】
ロボット11は、作業用機器、走行車輪32、ケーブル巻取装置33を主に備える。作業用機器は、カメラ、線量計等であり、建物内で環境モニタリング等の所要の作業を行う。走行車輪32は、遠隔操作により駆動し、ロボット11をフロア上で走行させる。ケーブル巻取装置33は、通信ケーブル18および電源ケーブル19を巻き取る。
【0018】
揚重機14は、基台41、伸縮マスト42、架台43、スロープ台44およびケーブル巻取装置45を備える。基台41は、走行車輪46およびアウトリガー47を有する。揚重機14は、移動時には走行車輪46でフロア上を走行し移動し、停止時にはアウトリガー47でフロア上に固定される。伸縮マスト42は、基台41に対して垂直上方向に設けられ、上下方向に伸縮する。
【0019】
架台43は、伸縮マスト42上に水平に設けられ、伸縮マスト42の伸縮に応じてフロア3と上階フロア4との間を昇降する。架台43の表面上には、ベルトコンベア48が取り外し可能に配置される(図2参照)。ベルトコンベア48は、架台43に搭載された渡板15(搭載物)を平行移動させる。なお、ベルトコンベア48は、常時架台43に固定されてもよい。
【0020】
スロープ台44は、フロア3と架台43とをつなげる傾斜を有するスロープ面44aを有する。スロープ台44は、基台41と連結され、かつ車輪を有することにより、揚重機14の走行に追従する。
【0021】
なお、走行車輪46、伸縮マスト42およびベルトコンベア48は、作業員の操作に基づいて適宜動作する。
【0022】
渡板15は、平面板15aおよび突起15bを有する。平面板15aは、ロボット11が走行可能な大きさを有する。平面板15aは、作業ロボットの通路を形成する通路部として機能する。突起15bは、平面板15aのロボット11の走行面とは逆面に、平面板15aに対してほぼ垂直に突出して設けられる。突起15bは、上階フロア4の手摺6(構造物)に接触して固定される固定部として機能する。突起15bは、手摺6に対して吹抜5側から接触し支持されればよく、突起15bの形状はこれに限らない。
【0023】
次に、第1実施形態における作業ロボット搬送システム1の作用について説明する。
【0024】
まず、揚重機14を建物2内に移動する作業が行われる。
【0025】
揚重機14は、作業員により出入口7から建物2内に移動される。このとき、中継車両13は建物2外に配置され、制御車両12は、中継車両13からさらに離れた建物2外に設置される。なお、ケーブル巻取装置45は、揚重機14がスムーズに移動できるように必要に応じて不要なケーブル18、19を巻き取ったり、開放したりする。
【0026】
揚重機14は、吹抜5の下へ移動すると、アウトリガー47により固定されて設置される。このとき、伸縮マスト42は収縮した状態である。架台43上には、ベルトコンベア48が積載され、ベルトコンベア48上には渡板15が積載される。なお、ベルトコンベア48および渡板15は、建物2外で架台43に積載されても、建物2内で積載されてもよい。
【0027】
次に、渡板15を上階フロア4に設置するための作業が行われる。
【0028】
図2は、渡板15を上階フロア4に設置する際の作業ロボット搬送システム1(搬送装置)の動作の説明図である。
【0029】
伸縮マスト42は、架台43が上階フロア4の手摺6の高さを超える高さであって、突起15bの端部が手摺6の高さを超えない高さまで伸長する。
【0030】
ベルトコンベア48は、作業員の操作に基づいて駆動し、渡板15を架台43から上階フロア4に向かって平行移動させる。渡板15は、傾斜しながら上階フロア4に向かって落下し、突起15bと手摺6とを接触させる。渡板15は、突起15bと手摺6との引っ掛かりにより、手摺6と上階フロア4とに支持されてロボット11の通路をスロープ状に形成する。
【0031】
伸縮マスト42は、渡板15を上階フロア4に設置すると、再びスロープ台44の高さとほぼ同じ高さまで収縮する。
【0032】
次に、ロボット11を上階フロア4に設置するための作業が行われる。
【0033】
図3は、ロボット11を架台43に搭載する際の作業ロボット搬送システム1(搬送装置)の動作の説明図である。
【0034】
図4は、ロボット11を上階フロア4に設置する際の作業ロボット搬送システム1の動作の説明図である。
【0035】
ロボット11は、制御車両12の制御装置の制御に基づいて、スロープ台44のスロープ面44aを走行し、架台43まで移動する。なお、ケーブル巻取装置33は、ロボット11がスムーズに移動できるように必要に応じて不要なケーブル18、19を巻き取ったり、開放したりする。
【0036】
なお、ロボット11は、渡板15の設置作業終了後に中継車両13等と接続されてもよいし、揚重機14の建物2への移動と共に建物2内に移動してもよい。また、渡板15の設置作業時に利用されたベルトコンベア48は、設置された状態でもよいし、取り外された状態でもよい。
【0037】
伸縮マスト42は、架台43と渡板15とが接触する高さまで伸長する。ロボット11は、制御装置の制御に基づいて走行車輪32を駆動し、スロープ状の渡板15の平面板15aを通り上階フロア4に移動する。
【0038】
ロボット11は、作業用機器により上階フロア4を含めた建物2内の環境モニタリング等の所要の作業を実施する。
【0039】
この作業ロボット搬送システム1は、人による状況把握が困難な建物2内において、階段等の上階フロア4への昇降設備の使用リスクが高い場合、すなわち、階段等の使用が移動距離やケーブル長やケーブル重量の問題が存在する場合であっても、ロボット11を上階フロア4へスムーズに移動させることができる。
【0040】
また、作業ロボット搬送システム1は搭載した渡板15を上階フロア4の端部に落下させるだけで設置することができるため、架台43の床を延伸させる、または高精度に近接・接触させる等して上階フロア4と連絡する動作が不要であり、渡板15を設置した後は、架台43を渡板15に近接させるだけでロボット11の投入・回収が可能となる。このため、簡素な機構でロボット11の投入・回収作業を確実かつ短時間で行うことが可能となる。
【0041】
なお、作業ロボット搬送システム1は、上階フロア4に手摺6がない場合についても、同様にロボット11を上階フロア4に移動させることができる。
【0042】
図5は、手摺がない上階フロア4に渡板15を設置する際の作業ロボット搬送システム1(搬送装置)の動作の説明図である。
【0043】
伸縮マスト42は、架台43が上階フロア4の高さとほぼ同じ高さまで伸長する。ベルトコンベア48は、作業員の操作に基づいて駆動し、渡板15を架台43から上階フロア4に向かって、上階フロア4と平行に移動させる。すると、突起15bは上階フロア4の高さ方向の面4a(上階フロア4の構造物)と接触し、渡板15は上階フロア4上で固定される。
【0044】
伸縮マスト42は、渡板15を上階フロア4に設置すると、再びスロープ台44の高さとほぼ同じ高さまで収縮する。
【0045】
ロボット11を上階フロア4に設置する作業については、渡板15が上階フロア4に対して平行に設置される点以外は、図3および図4で説明した作業とほぼ同様であるため、説明を省略する。
【0046】
このように、第1実施形態における作業ロボット搬送システム1は、上階フロア4の吹抜5の手摺6の有無に影響されることなく、ロボット11を上階フロア4に移動させることができる。
【0047】
また、架台43に手摺を撤去するための工作装置(例えばレーザー切断装置)を設置してもよい。大破した手摺6の残骸がある場合や、手摺6が破損していたり元々の強度的にロボットおよび渡板15の重量に耐えられない場合、あるいは渡板15の設置に適さない障害物(瓦礫、格子状に配置された柱、ガラス等)が存在する場合、工作装置により手摺または障害物を撤去後、渡板15を設置する。これにより、ロボット11のアクセスルートを確実に確保することが可能である。
【0048】
[第2実施形態]
本発明に係る搬送装置、作業システムおよび搬送方法の第2実施形態を添付図面に基づいて説明する。
【0049】
図6は、本発明に係る搬送装置および作業システムの第2実施形態を示す構成図である。
【0050】
第2実施形態における作業ロボット搬送システム61が、第1実施形態の作業ロボット搬送システム1と異なる点は、建物2内の汚染物を回収するための排気装置62および排気ホース63が新たに設けられた点である。その他の構成については、第1実施形態とほぼ同様であるため、第1実施形態と対応する構成および部分については同一の符号を付し、重複する説明を省略する。
【0051】
排気装置62は、フィルターを備える汚染物回収用の遮蔽ボックスを搭載する。排気装置62は、排気ホース63の一端と接続されている。排気装置62は、揚重機14と同フロアに設置される。排気装置62は、ロボット11と同様に、通信ケーブル18および電源ケーブル19を介して中継車両13と接続され、遠隔操作される。
【0052】
ロボット11は、排気ホース63の先端を保持し(先端と接続され)、ロボット11の移動と共に上階フロア4等の周囲環境の汚染物(ダスト等)を回収する。ロボット11の近傍には、排気ホース巻取装置64が配置される。排気ホース巻取装置64は、例えばロボット11と共に移動可能に構成され、ロボット11がスムーズに移動できるように必要に応じて不要な排気ホース63を巻き取ったり、開放したりする。
【0053】
この作業ロボット搬送システム61によれば、第1実施形態で奏する効果に加え、例えば事故発生等により高線量の汚染物が存在し、上階フロア4に人が入れないような場合であっても、排気装置62および排気ホース63で汚染物を回収することができる点で有効である。
【0054】
また、作業ロボット搬送システム1は、階段を用いることなくロボット11や排気ホース63を上階に移動させることができるため、排気ホース63のような一定の太さを有するようなものであっても、短い距離で上階まで移動させることができる点でも有効である。
【0055】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【0056】
例えば、ロボット11は、バッテリ駆動とすることにより電源ケーブル19を省略してもよい。また、ロボット11は、通常時においてはバッテリ駆動とし、非常時においては中継車両13から電源ケーブルを介して供給される電源で駆動するようにしてもよい。揚重機14および排気装置62の電源についても同様である。
【0057】
また、揚重機14は、ロボット11と同様に、制御車両12の制御装置で遠隔操作されてもよい。ロボット11または揚重機14に無線モジュールを搭載し、制御装置からの制御信号を無線で受信してもよい。
また、各実施形態では建物2に吹抜5があるものとして説明したが、例えばフロアの一部が外に面している場合(例えば、上階フロア4にバルコニーが設けられている場合やフロアの外壁が一部損なわれている場合)は、そこに揚重機14を用いてアクセスするものとしてもよい。
また、渡板15の突起15bは、手摺6あるいは上階フロア4と接触して渡板15の位置決め手段として機能すればよく、渡板15は自身の重量で上階フロア4に安定して設置され、作業ロボット1の通過時は渡板15の吹抜側端部が架台43によって支持されるが、渡板15を確実に固定設置するため、突起15bを機械的要素あるいは磁気的要素で手摺6や上階フロア4に固定するものとしてもよい。例えば、機械的要素として手摺6と係合するフック、係合した状態でロックするナス環フック、上階フロア4の床を挟み込む構造、吸盤や粘着材等で吸着する構造とすることが可能である。また、磁気的要素としては、手摺6や上階フロア4が磁性体であれば突起15bに磁石を取り付ければよい。
【符号の説明】
【0058】
1、61 作業ロボット搬送システム
2 建物
3 フロア
4 上階フロア
5 吹抜
6 手摺
11 作業ロボット(ロボット)
12 制御車両
13 中継車両
14 揚重機
15 渡板
17 光ケーブル
18 通信ケーブル
19 電源ケーブル
33 ケーブル巻取装置
42 伸縮マスト
43 架台
44 スロープ台
45 ケーブル巻取装置
62 排気装置
63 排気ホース
64 排気ホース巻取装置
【特許請求の範囲】
【請求項1】
建物の複数階層を貫通する吹抜または外に面した上階フロアへ、この上階フロアよりも下層の下階フロアから搭載物を搬送する搬送装置であって、
前記下階フロアと前記上階フロアとの間を昇降し、かつ搭載された搭載物を平行移動させる移動装置を有する架台と、
前記架台上で前記移動装置により平行移動されて前記上階フロアまたは前記上階フロアの構造物に接触することにより固定される固定部と、通路を形成する通路部とを有し、前記搭載物としての渡板とを備えることを特徴とする搬送装置。
【請求項2】
前記固定部は、前記上階フロアの手摺に対して接触して固定され、前記通路部は前記通路をスロープ状に形成する請求項1に記載の搬送装置。
【請求項3】
前記架台に設けられ、前記上階フロアの手摺を撤去する工作装置をさらに備えた請求項1または2に記載の搬送装置。
【請求項4】
前記下階フロアと前記架台とをつなげる傾斜を有するスロープ台をさらに備えた請求項1〜3の何れか1項に記載の搬送装置。
【請求項5】
請求項1〜4の何れか1項に記載の搬送装置と、
前記建物内で作業する自走可能な作業機械と、
前記下階フロアに配置され前記作業機械を遠隔で制御する制御装置とを有し、
前記架台が前記作業機械を搭載可能であることを特徴とする作業システム。
【請求項6】
前記作業機械に一端が接続された排気ホースと、
前記排気ホースの他端と接続され前記排気ホースの排気物を回収する排気装置とをさらに備えた請求項5に記載の作業システム。
【請求項7】
建物の複数階層を貫通する吹抜または外に面した上階フロアへ、この上階フロアよりも下層の下階フロアから搭載物を搬送する搬送方法であって、
前記下階フロアと前記上階フロアとの間を昇降し、かつ搭載された搭載物を平行移動させる移動装置を有する架台に、前記上階フロアの構造物に接触することにより固定される固定部と、通路を形成する通路部とを有する渡板を搭載する搭載ステップと、
前記架台を前記上階フロアまで上昇する上昇ステップと、
前記渡板を前記架台上で平行移動させて前記渡板を前記上階フロアに落下させて設置する設置ステップとを備えることを特徴とする搬送方法。
【請求項1】
建物の複数階層を貫通する吹抜または外に面した上階フロアへ、この上階フロアよりも下層の下階フロアから搭載物を搬送する搬送装置であって、
前記下階フロアと前記上階フロアとの間を昇降し、かつ搭載された搭載物を平行移動させる移動装置を有する架台と、
前記架台上で前記移動装置により平行移動されて前記上階フロアまたは前記上階フロアの構造物に接触することにより固定される固定部と、通路を形成する通路部とを有し、前記搭載物としての渡板とを備えることを特徴とする搬送装置。
【請求項2】
前記固定部は、前記上階フロアの手摺に対して接触して固定され、前記通路部は前記通路をスロープ状に形成する請求項1に記載の搬送装置。
【請求項3】
前記架台に設けられ、前記上階フロアの手摺を撤去する工作装置をさらに備えた請求項1または2に記載の搬送装置。
【請求項4】
前記下階フロアと前記架台とをつなげる傾斜を有するスロープ台をさらに備えた請求項1〜3の何れか1項に記載の搬送装置。
【請求項5】
請求項1〜4の何れか1項に記載の搬送装置と、
前記建物内で作業する自走可能な作業機械と、
前記下階フロアに配置され前記作業機械を遠隔で制御する制御装置とを有し、
前記架台が前記作業機械を搭載可能であることを特徴とする作業システム。
【請求項6】
前記作業機械に一端が接続された排気ホースと、
前記排気ホースの他端と接続され前記排気ホースの排気物を回収する排気装置とをさらに備えた請求項5に記載の作業システム。
【請求項7】
建物の複数階層を貫通する吹抜または外に面した上階フロアへ、この上階フロアよりも下層の下階フロアから搭載物を搬送する搬送方法であって、
前記下階フロアと前記上階フロアとの間を昇降し、かつ搭載された搭載物を平行移動させる移動装置を有する架台に、前記上階フロアの構造物に接触することにより固定される固定部と、通路を形成する通路部とを有する渡板を搭載する搭載ステップと、
前記架台を前記上階フロアまで上昇する上昇ステップと、
前記渡板を前記架台上で平行移動させて前記渡板を前記上階フロアに落下させて設置する設置ステップとを備えることを特徴とする搬送方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−14400(P2013−14400A)
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願番号】特願2011−147525(P2011−147525)
【出願日】平成23年7月1日(2011.7.1)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願日】平成23年7月1日(2011.7.1)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]