
搬送装置および組合せ計量装置
【課題】搬送装置の振動を適切に制御する。
【解決手段】組合せ計量装置の制御部において、加振パルス設定部141および制御パルス生成部143を設ける。また、加振パルス設定部141に、成長量演算部145、減衰量演算部146および加振パルス演算部147を設ける。成長量演算部145によって、振動を目標振幅まで成長させる(振幅を増加させる)ための成長力積を各加振パルスごとに求める。また、減衰量演算部146によって、減衰量を補うための補完力積を各加振パルスごとに求める。加振パルス演算部147は、成長力積と補完力積とを加算して、各加振パルスによって与える力積を求め、加振パルス列を求める。さらに、制御パルス生成部143は、求められた加振パルス列に応じて、電磁石への電圧の印加を制御する。
【解決手段】組合せ計量装置の制御部において、加振パルス設定部141および制御パルス生成部143を設ける。また、加振パルス設定部141に、成長量演算部145、減衰量演算部146および加振パルス演算部147を設ける。成長量演算部145によって、振動を目標振幅まで成長させる(振幅を増加させる)ための成長力積を各加振パルスごとに求める。また、減衰量演算部146によって、減衰量を補うための補完力積を各加振パルスごとに求める。加振パルス演算部147は、成長力積と補完力積とを加算して、各加振パルスによって与える力積を求め、加振パルス列を求める。さらに、制御パルス生成部143は、求められた加振パルス列に応じて、電磁石への電圧の印加を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物品を振動により搬送する技術に関する。より詳しくは、搬送振動を制御する技術に関する。
【背景技術】
【0002】
計量装置等においては、供給された物品を計量ホッパ等へ移送するために、例えば電磁フィーダ(搬送装置)が備えられる。各電磁フィーダは、例えばベース部材に前後一対のバネ体を介して取り付けられたトラフと、上記ベース部材に設置された電磁石と、電磁石に通常搬送期間中、間欠的に通電する通電制御手段とを有している。そしと、電磁フィーダは、電磁石で電磁力を間欠的に発生させて、その発生時に上記バネ体を撓ませながらトラフを一方に変位させ、また、その非発生時に上記バネ体の弾性復元力によってトラフを他方に変位させることにより、トラフを振動させてトラフ上の物品を所定方向へ移送するように構成されたものである。
【0003】
この種の電磁フィーダが複数設けられた例えば組合せ計量装置等において、計量精度及び装置の効率や組合せ計算の効率を上げることにより稼働率の向上を図るには、電磁フィーダから計量ホッパへの物品供給量の精度を向上させる必要がある。すなわち、電磁フィーダの搬送振動を高精度に制御する必要がある。
【0004】
【特許文献1】特開平09−235016号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところが、電磁フィーダを意図したとおりに駆動させる場合、トラフが定常振動している状態(定常状態)の前後に発生する過渡的な振動をいかに抑制するか、すなわち、過渡期をいかに短く、かつ、その間の挙動をいかに許容される範囲に収めるかという問題があった。特に、振動の開始時において、振動状態を迅速に定常状態にしなければならないという問題があった。
【0006】
これを解決する手法として、例えば電磁フィーダの電磁石を過励磁させることが考えられる。過励磁とは、トラフの振動を開始させるときに、定常状態において電磁石に与える電圧(定常電圧)よりも大きな電圧(過電圧)を印加することにより、強い電磁力を発生させて、振動させる手法である。これによって、トラフが目標振幅に到達する期間が短縮され、定常状態になった時点で印加する電圧を定常電圧とすることにより、トラフの振動を迅速に定常状態に安定させることができる。
【0007】
しかし、過励磁を行う場合でも、どの程度の過電圧をどのくらいの期間印加すべきか、あるいは、どの周波数で与えるのが適切かという問題がある。すなわち、各パラメータをどのように決定するかという問題がある。例えば、過度の過励磁によって、オーバーシュート(目標振幅よりも振幅が大きくなる現象)が発生すると、かえって定常状態に到達するのが遅れるだけでなく、電磁フィーダを破壊するおそれもある。一方、過小な過励磁では定常状態に到達するまでの期間が長くなってしまい、過励磁を行う効果が低下する。また、電圧を印加する際の周波数が不適切であれば、電磁力が振動を減衰させてしまい(アンダーシュート)、定常状態に到達するのが遅れる原因となる。
【0008】
従来では、振動センサを設けて、過渡期の振幅を検出しつつ、フィードバック制御によって印加する電圧を決定する手法が提案されているが、タイムラグによる誤制御や、装置構成が複雑化するなどの問題がある。
【0009】
本発明は、上記課題に鑑みなされたものであり、搬送装置の振動を適切に制御することを目的とする。
【課題を解決するための手段】
【0010】
上記の課題を解決するため、請求項1の発明は、加振パルス列の印加に基づく電磁石の間欠通電により振動部を振動させることによって、物品を搬送する搬送装置であって、目標振幅に基づいて、前記加振パルス列を予め設定する加振パルス設定手段と、前記加振パルス設定手段により設定された前記加振パルス列に基づいて、前記電磁石への通電を制御する通電制御手段とを備え、前記加振パルス設定手段は、前記加振パルス列を構成する各加振パルスによって、前記振動部の振幅を成長させるための成長力積を求める成長量演算手段と、各加振パルスによって前記振動部の運動量の減衰量を補うための補完力積を求める減衰量演算手段と、前記成長量演算手段により求められた前記成長力積と、前記減衰量演算手段により求められた前記補完力積とに基づいて、前記加振パルス列を求める加振パルス演算手段とを備えることを特徴とする。
【0011】
また、請求項2の発明は、請求項1の発明に係る搬送装置であって、前記成長力積演算手段は、前記振動部が目標振幅で振動する際の最大運動量を演算し、前記最大運動量を所定のパターンに応じて各加振パルスに分配することにより、前記成長力積を演算することを特徴とする。
【0012】
また、請求項3の発明は、請求項1または2の発明に係る搬送装置であって、前記減衰量演算手段は、前記加振パルス列の各周期ごとに、前記振動部の運動量の減衰量を演算することによって前記補完力積を求めることを特徴とする。
【0013】
また、請求項4の発明は、請求項1ないし2のいずれかの発明に係る搬送装置であって、前記加振パルス演算手段は、前記成長力積と前記補完力積とを加算した値が、各加振パルスによって前記振動部に与えられる加振力積となるように、前記加振パルス列を演算することを特徴とする。
【0014】
また、請求項5の発明は、請求項1ないし4の発明に係る搬送装置であって、前記加振パルス演算手段は、前記加振パルス列の周波数を、前記振動部に固有の共振周波数とすることを特徴とする。
【0015】
また、請求項6の発明は、請求項1ないし5のいずれかの発明に係る搬送装置であって、搬送期間終了後に前記振動部の振動を停止させるための制振パルス列を設定する制振パルス設定手段をさらに備え、前記制振パルス設定手段は、前記振動部の振動の波形に基づいて、前記制振パルスを印加するタイミングを設定し、前記通電制御手段は、前記搬送期間終了時の前記電磁石への通電を、前記制振パルス設定手段で設定された前記制振パルスによって制御することを特徴とする。
【0016】
また、請求項7の発明は、物品を計量して組み合わせる組合せ計量装置であって、加振パルス列の印加に基づく電磁石の間欠通電により振動部を振動させることによって、物品を搬送する複数の搬送装置と、前記複数の搬送装置によって搬送される物品をそれぞれ計量する複数の計量手段とを備え、前記搬送装置が、目標振幅に基づいて、前記加振パルス列を予め設定する加振パルス設定手段と、前記加振パルス設定手段により設定された前記加振パルス列に基づいて、前記電磁石への通電を制御する通電制御手段とを備え、前記加振パルス設定手段は、前記加振パルス列を構成する各加振パルスによって、前記振動部の振幅を成長させるための成長力積を求める成長量演算手段と、各加振パルスによって前記振動部の運動量の減衰量を補うための補完力積を求める減衰量演算手段と、前記成長量演算手段により求められた前記成長力積と、前記減衰量演算手段により求められた前記補完力積とに基づいて、前記加振パルス列を求める加振パルス演算手段とを備えることを特徴とする。
【発明の効果】
【0017】
請求項1ないし7に記載の発明では、加振パルス列を構成する各加振パルスによって、振動部の振幅を成長させるための成長力積を求め、各加振パルスによって振動部の運動量の減衰量を補うための補完力積を求め、これらの値に基づいて、加振パルス列を求めることにより、振動状態を検出するセンサなどの機構が不要である。
【0018】
請求項5に記載の発明では、加振パルス列の周波数を、振動部に固有の共振周波数とすることにより、加振パルス列について、適切な周波数を容易に決定することができる。
【0019】
請求項6に記載の発明では、振動部の振動の波形に基づいて、搬送期間終了時に振動部の振動を停止させるための制振パルス列を設定することにより、搬送期間が終了したときに、迅速に振動部の振動を停止することができる。
【発明を実施するための最良の形態】
【0020】
以下、本発明の好適な実施の形態について、添付の図面を参照しつつ、詳細に説明する。
【0021】
<1. 第1の実施の形態>
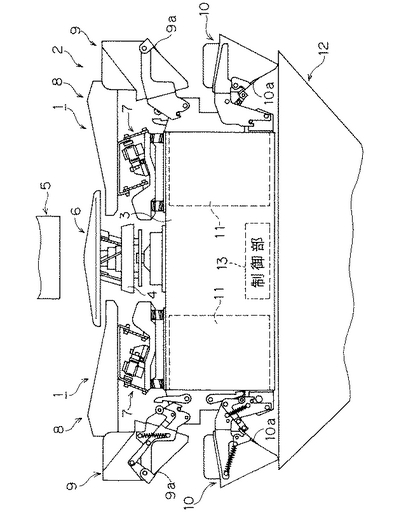
図1は、本発明の第1の実施の形態に係る電磁フィーダ1を備えた組合せ計量装置2の概略構成を示す側面図である。また、図2は、電磁フィーダ1の構成を具体的に示す側面図である。図1を参照して、組合せ計量装置2は、機台3の中央に加振機4を介して設置され、上方の筒状の投入シュート5から投下された被計量物を周囲に分散する分散テーブル6と、その周囲に複数の加振機7のそれぞれを介して放射状に配設され、被計量物を搬送する複数のトラフ8と、複数のトラフ8の先端部下方にそれぞれ位置するように放射状に配設された複数のプールホッパ9と、複数のプールホッパ9のそれぞれの下方に配設された複数の計量ホッパ10とを備えている。ここで、電磁フィーダ1は、加振機7及びトラフ8を含む。
【0022】
そして、機台3の内部には、各プールホッパ9の各ゲート9a及び各計量ホッパ10の各ゲート10aの開閉を制御する、複数のゲート開閉装置11が配設されている。ゲート開閉装置11は、図示しないモータによって駆動され、被計量物の排出指令を受けたときに、図示しない駆動手段により計量ホッパ10内の被計量物を集合シュート12内に排出させ、空になった計量ホッパ10内にプールホッパ9内の被計量物を投入させるように動作する。また、計量ホッパ10には、図示しない重量検出器が機台3内で連設されており、計量ホッパ10内の被計量物の重量を計量する。
【0023】
図2を参照して、電磁フィーダ1が備える加振機7は、複数のコイルスプリング21を介して機台3上に設置されたベース部材22と、ベース部材22の上面上に設置された電磁石23と、ベース部材22の前部側(図面右側)及び後部側(図面左側)にボルト24によって後傾姿勢で平行に取り付けられた一対の板バネ25とを有している。但し、一対の板バネ25は必ずしも平行に取り付けられている必要はない。これら両板バネ25の各上部には、トラフ8のブラケット8aがボルト26によって固定されている。また、ブラケット8aにおける電磁石23の磁力発生面23aに対向する面には、磁性体27が取り付けられている。電磁石23には、後述するフィーダ制御装置30によって間欠的に通電がなされる。
【0024】
電磁石23に通電がなされると、磁力発生面23aと磁性体27との間に電磁力(吸引力)が作用し、その結果、前後の板バネ25が撓みながら、またこれと同時にトラフ8がやや沈み込みながら、後方(図面左側)に変位することとなる。つまり、板バネ25が固定されて弾性部材として機能するトラフ8が、後方に変位することとなる。一方、電磁石23への通電が停止されると、磁力発生面23aと磁性体27との間の電磁力(吸引力)が消失し、トラフ8が、板バネ25の弾性復元力によって上方へやや浮き上がりながら前方(図面右側)に変位することとなる。
【0025】
したがって、電磁石23に間欠的に通電がなされることによって電磁力が間欠的に発生し、これにより、トラフ8が前後方向に振動することとなる。このとき、電磁石23に発生する電磁力は、フィーダ制御装置30からの通電時の電圧値によって決まる。すなわち、電圧Eと電磁力Fとの関係式は予め決定される。
【0026】
トラフ8が振動すると、トラフ8上の物品(被計量物、被搬送物)が図1に示したプールホッパ9に移送される。また、予め定められた物品の搬送期間が終了すると、トラフ8の振動を停止させることにより、電磁フィーダ1からプールホッパ9への物品の移送が停止される。
【0027】
上記の通り、組合せ計量装置2において、電磁フィーダ1からプールホッパ9への物品供給量の精度を向上させるためには、物品が搬送される期間(すなわち、トラフ8が振動している期間、以下、「物品搬送期間」と称する)の長さと、その間の振動の強度(主にトラフ8の振幅)を精度よく制御することが重要となる。
【0028】
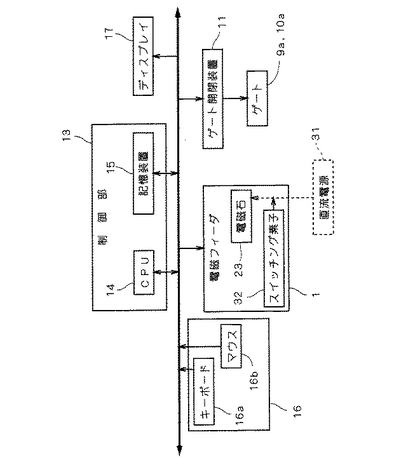
図3は、制御部13と他の構成との接続を示すバス配線図である。図1では、図示を省略しているが、組合せ計量装置2は操作部16と、オペレータにデータを表示するディスプレイ17とをさらに備えている。
【0029】
制御部13は、主にCPU14と記憶装置15から構成され、一般的なコンピュータとしての機能を備えている。CPU14は、記憶装置15に記憶されたプログラムに従って、各種データを処理することにより、組合せ計量装置2の他の構成を制御するための制御信号等を生成する。CPU14は、このような制御信号をバス配線を介して送信することによって各構成を制御する。記憶装置15は、CPU14の一時的なワーキングエリアとして使用されるRAM、読み取り専用のROMおよびハードディスク装置などから構成され、プログラムや操作部16から入力されたデータ等が記憶される。
【0030】
操作部16は、キーボード16aおよびマウス16bから構成され、オペレータからの指示を入力するために使用される。オペレータが操作部16を操作することによって、組合せ計量装置2には、各種パラメータやプログラム、あるいは指示等が入力される。なお、操作部16としては、各種ボタン類やタッチパネルなどが採用されてもよい。
【0031】
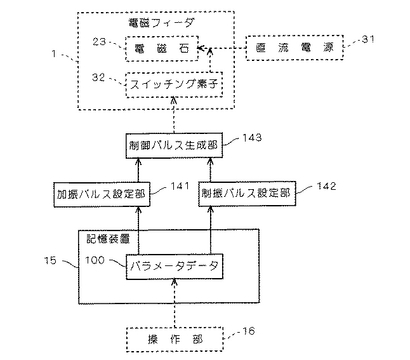
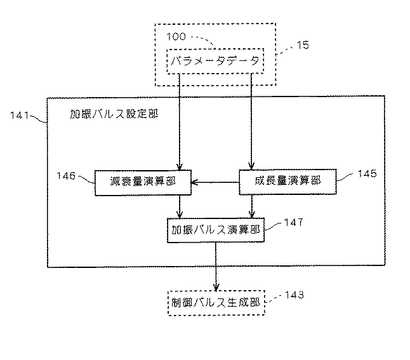
図4は、主にCPU14がプログラムに従って動作することによって実現される機能構成を示すブロック図である。図4において、加振パルス設定部141、制振パルス設定部142および制御パルス生成部143が、主にCPU14によって実現される機能構成である。なお、CPU14は、プログラムに従って動作することによって、これらの機能構成を実現するが、これらの全部または一部を専用の回路によってハードウェア的に実現してもよい。
【0032】
図4に示すパラメータデータ100とは、組合せ計量装置2に予め与えられている設定データや初期値等のデータであって、主に操作部16から入力され、記憶装置15に記憶されている。なお、パラメータデータ100には、振動部の質量m、振動部の共振周波数f0、振動部の減衰比ζ、および目標振幅r0等が含まれている。これらの値は、例えば予め実験により求めておくことができる。
【0033】
加振パルス設定部141は、パラメータデータ100を参照しつつ、電磁フィーダ1のトラフ8を振動させるための加振パルス列Pfを設定して、制御パルス生成部143に伝達する。
【0034】
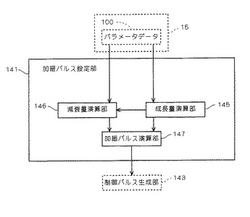
図5は、加振パルス設定部141の詳細を示すブロック図である。加振パルス設定部141は、成長量演算部145、減衰量演算部146および加振パルス演算部147を備える。
【0035】
成長量演算部145は、定常振動状態における最大運動量Mmaxを演算する。最大運動量Mmaxとは、トラフ8が目標振幅r0で振動している状態において、速度が最大となっている時刻nT(T:振動周期)における運動量である。
【0036】
なお、振動している物体において、速度が最大となるときの変位は「0」である。すなわち、与えた電磁力の位置エネルギへの寄与分は「0」である。したがって、このとき板バネ25を考慮する必要はない。
【0037】
また、成長量演算部145は、各加振パルスによって振動を成長させるために与える力積(以下、「成長力積GWn」)を決定して、減衰量演算部146および加振パルス演算部147に伝達する。
【0038】
減衰量演算部146は、加振パルス列の1周期の間の減衰量(以下、「減衰量Dn」)を求め、これに相当する力積(以下、「補完力積DWn」)の値を求めて加振パルス演算部147に伝達する。
【0039】
加振パルス演算部147は、成長力積GWnと補完力積DWnとに基づいて、加振パルスによって与えるべき力積Wnを求める。さらに、求めた力積Wnに基づいて、各加振パルスを求め、これによって加振パルス列Pfを求める。
【0040】
加振パルス設定部141は、加振パルス演算部147によって求められた加振パルス列Pfを制御パルス生成部143に出力する。
【0041】
図4に戻って、制振パルス設定部142は、電磁フィーダ1による物品の搬送を停止させるための制振パルス列Psを演算により求め、制御パルス生成部143に出力する。
【0042】
制御パルス生成部143は、加振パルス列Pfおよび制振パルス列Psに応じた制御パルス列Pcを生成して出力する。制御パルス生成部143から出力された制御パルス列Pcはスイッチング素子32に入力され、制御パルスが入力されている期間、スイッチング素子32は導通状態となって、直流電源31が電磁石23に通電される。これにより、トラフ8の振動が制御される。
【0043】
つまり、制御パルス生成部143及びスイッチング素子32は、直流電源31から電磁石23への通電を、加振パルス列Pfまたは制振パルス列Psによって制御する通電制御手段として機能する。
【0044】
以上が本実施の形態における組合せ計量装置2の機能および構成の説明である。なお、上記説明では、制御部13は組合せ計量装置2に1つ備えられているように記載しているが、より詳細には各電磁フィーダ1について制御部13の機能が実現されている。また、各電磁フィーダ1に制御部13と同等の機能構成が設けられていてもよい。
【0045】
次に、本実施の形態に係る電磁フィーダ1を備えた組合せ計量装置2に関して、トラフ8の振動を制御する理論について説明する。
【0046】
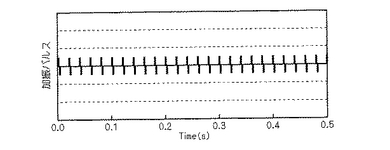
図6は、加振パルス列の例を示す図である。このような加振パルス列では、電磁石に与えられる各パルス電圧の電圧値は等しくなる。すなわち、図6に示す加振パルス列では過励磁は行われない。図7は、図6に示す加振パルス列によるトラフ8の変位を示す図である。変位は、電磁石23に通電がなされず板バネ25が変形していない時のトラフ8の初期位置を「0」としている。また、最初の加振パルスを与える時刻を「0」とする。
【0047】
以下、加振電圧を印加して振動を開始してから、定常振動状態になるまでの期間を起動期間、定常振動状態になってから加振電圧の印加を停止するまでの期間を定常搬送期間、加振電圧の印加を停止してから振動が停止するまでの期間を収束期間とそれぞれ定義する。
【0048】
電磁フィーダ1においては、トラフ8が振動している間、物品が搬送される。すなわち、起動期間、定常搬送期間および収束期間を合計した期間(物品搬送期間)の間は物品が搬送される。
【0049】
先述のように、定常搬送期間の間は、トラフ8の振幅が一定となる定常振動状態である。電磁フィーダ1の搬送量はトラフ8の振幅に依存するため、定常搬送期間における物品の搬送量(プールホッパ9への供給量)は、ほぼ時間に比例し、比較的高精度に制御することができる。
【0050】
しかし、起動期間および収束期間においては、トラフ8の振幅が安定しないため、物品の供給量は比較的制御しにくい。図6に示す例では、起動期間においては、定常電圧を印加しているにもかかわらず、トラフ8の振幅が徐々にしか上昇しないために、実際の供給量が意図した供給量よりも少量となる。また、定常電圧の印加を停止しても、振動は直ちに停止することはなく、収束期間においてトラフ8の振動が継続することによって物品が搬送されてしまい、供給量が増加する。
【0051】
このことから、電磁フィーダ1においては、起動期間および収束期間を可能な限り短くすることが重要となる。
【0052】
まず、起動期間を短縮する手法について説明する。
【0053】
定常振動状態(定常搬送期間)における振動の振幅は目標振幅r0であるから、定常振動状態における変位X(t)は、共振周波数f0を用いて、数1で表すことができる。
【0054】
【数1】

【0055】
したがって、定常振動状態における速度v(t)は、数2で表すことができる。
【0056】
【数2】
【0057】
定常状態の最大速度Vmaxは時刻nTにおける速度であるから、最大速度Vmaxは数3で求まる。
【0058】
【数3】
【0059】
最大速度Vmaxが求まると、最大運動量Mmaxは数4で求まる。
【0060】
【数4】
【0061】
電磁フィーダ1は、静止しているトラフ8を目標振幅r0で定常振動させるために、最大運動量Mmaxに相当する力積GWを電磁石23によって与える。この力積GWの与え方は、種々の手法が考えられる。例えば、1個の加振パルスによって与えてもよい。
【0062】
本実施の形態における電磁フィーダ1では、複数の加振パルスによって最大運動量Mmaxに相当する力積GWを与える。すなわち、n番目の加振パルスによって与える成長力積GWnを用いると、数5で表される。
【0063】
【数5】
【0064】
また、本実施の形態における電磁フィーダ1では、最初に電磁力Fmaxを与えて強く加振し、その後徐々に振幅を増加させる手法を採用する。すなわち、成長力積GWnを与える電磁力を電磁力GFn、加振パルスのパルス幅をパルス幅tpとおくと、成長力積GWnを数6で示すように与える。
【0065】
【数6】
【0066】
なお、数6における「A」は、振幅の立ち上がりを調整するための無次元のパラメータであって任意に与えることができる。したがって、n個の加振パルスによって力積GWを与えるとすると、数4ないし数6から、Fmaxは数7で求まる。
【0067】
【数7】
【0068】
すなわち、成長量演算部145は、目標振幅r0が与えられると、数7を演算してFmaxを求め、数6で示す成長力積GWnを減衰量演算部146および加振パルス演算部147に伝達する。
【0069】
最初の加振パルスによって、一旦振動を開始したトラフ8は、次の加振パルスが与えられるまでの間(1周期の間)に減衰する。電磁フィーダ1において、振動の減衰量は加振パルスによって補われる。すなわち、加振パルス列の1周期ごとに減衰量を補う必要があるので、減衰量演算部146は、1周期ごとの減衰量Dnを求める必要がある。
【0070】
ここで、振動が自然減衰する場合を考える。振幅rn-1の振動が減衰する場合、1周期後の振幅rnは、減衰比ζを用いて、数8で近似することができる。
【0071】
【数8】
【0072】
また、減衰によって周波数は変化しないと近似できるので、振幅rnの振動における最大速度Vnは、数3と同様に数9で求まる。
【0073】
【数9】
【0074】
したがって、ある振動状態から1周期の間(n−1番目の加振パルスを与えてからn番目の加振パルスを与えるまでの間)の運動量の減衰量Dnは、数10で表される。
【0075】
【数10】
【0076】
さらに、数10に数8を代入することによって、数11が得られる。
【0077】
【数11】
【0078】
ここで、n番目の加振パルスを加えた時点での運動量Mnを用いて、その振動の振幅rnを表すと、数4から数12が求まる。
【0079】
【数12】
【0080】
数11に数12を代入すると数13が求まる。
【0081】
【数13】
【0082】
なお、最初の加振パルスが与えられるまでトラフ8は静止しており、最初の加振パルスを与えるときには減衰量は考慮しなくてよいので、「D1=0」である。
【0083】
したがって、減衰量Dnを補うために、n番目の加振パルスによって電磁石23から与えなければならない補完力積DWnは、数14で求まる。
【0084】
【数14】
【0085】
ここで、n番目の加振パルスによって与える電磁力Fnとおくと、n番目の加振パルスによって与えられる力積(Fn・tp)と、n−1番目の加振パルスが与えられてからn番目の加振パルスが与えられるまでの減衰量Dnとを用いて、運動量Mnは、数15と表すことができる。
【0086】
【数15】
【0087】
詳細は後述するが、加振パルスによって与える電磁力Fnは、振動を成長させるための成長電磁力GFnと、減衰量を補うための補完電磁力DFnとを加算したものである。
【0088】
したがって、数15は数16に変形される。
【0089】
【数16】
【0090】
また、減衰量Dnは、数14に示すように補完力積DWnに相当するので、補完電磁力DFnを用いて、数17で表せる。
【0091】
【数17】
【0092】
したがって、数16に数17を代入して、数18が得られる。
【0093】
【数18】
【0094】
ただし、最初の加振パルスによって与えられる電磁力F1には、減衰量を補う分の減衰電磁力は「0」なので、「GF1=F1=Fmax」である。
【0095】
数18を数14に代入すると、補完力積DWnは、数19で表される。
【0096】
【数19】
【0097】
さらに、数6を数19に代入すると、数20が求まる。
【0098】
【数20】
【0099】
ただし、「DW1=0」である。
【0100】
このように、減衰量演算部146は、成長量演算部145から成長力積GWnを入力として得て、記憶する。さらに、前回までに、記憶しておいた成長力積GWn-1と、パラメータデータ100に含まれる減衰比ζとに基づいて、数20を演算することによって補完力積DWnを求めて、加振パルス演算部147に伝達する。
【0101】
加振パルス演算部147は、成長量演算部145から得られる成長力積GWnと、減衰量演算部146から得られる補完力積DWnとに基づいて、n番目の加振パルスによって与える加振力積Wnを求める。すなわち、数21によって、加振力積Wnを求める。
【0102】
【数21】
【0103】
さらに、加振力積Wnから各加振パルスによって電磁石23に発生させる電磁力Fnを数22により求める。
【0104】
【数22】
【0105】
なお、電磁力Fは、電圧Eを印加することによって電磁石23に発生する電磁力であるから、電圧Eと電磁力Fとの関係式F(E)は、電磁石23の特性として予め求めておくことができる。
【0106】
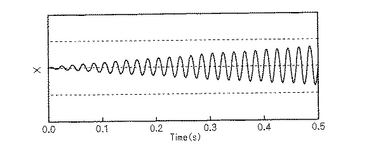
図8は、本実施の形態における加振パルス列Pfの例を示す図である。すなわち、本実施の形態における電磁フィーダ1では、加振パルス演算部147によって、図8に示すような加振パルス列Pfが求められる。なお、図8に示す加振パルス列Pfによって与えられる電圧Eは、数23によって示される。
【0107】
【数23】
【0108】
なお、数23における「B」は、振幅の立ち上がりを調整するための無次元のパラメータであって、数6における「A」の値に応じて任意に与えることができる。
【0109】
1番目の加振パルスによって印加される電圧Emaxは、1番目の加振パルスによって発生する電磁力を発生させるから、電圧Emaxは数24で求めることができる。
【0110】
【数24】
【0111】
また、定常振動状態(目標振幅r0)においては、成長電磁力GFnはすでに「0」であることから、電圧Eminは、数25で求めることができる。
【0112】
【数25】
【0113】
加振パルス演算部147は、電圧Eに応じて、与えるべき加振パルスについても予め求めておくことができる(加振パルスと電圧Eとの関係式は既知である)。すなわち、数22によって、必要な電磁力Fが求まれば、その電磁力Fを電磁石23に発生させるための加振パルスを求めることができる。
【0114】
このように、加振パルス設定部141は、加振パルス演算部147により各加振パルスを求めることによって、加振パルス列Pfを演算によって求め、制御パルス生成部143に伝達する。
【0115】
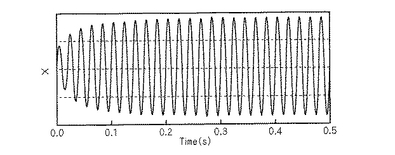
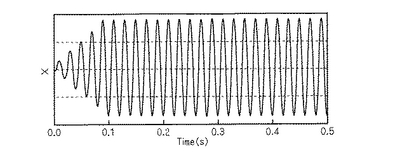
図9は、図8に示す加振パルス列によって加振されたトラフ8の変位を示す図である。図7に示す例では、起動期間が9秒程度(図示せず)であったが、図9から明らかなように、電磁フィーダ1では、0.1秒ほどで定常振動状態に到達しており、起動期間が短縮されている。
【0116】
このように、本実施の形態における電磁フィーダ1は、加振パルス列Pfを構成する各加振パルスごとに、トラフ8の振幅を成長させるための成長力積GWnを求める成長量演算部145と、トラフ8の運動量の減衰量Dnを求め、各加振パルスごとに、減衰量Dnを補うための補完力積DWnを求める減衰量演算部146と、成長力積GWnと補完力積DWnとに基づいて、加振パルス列Pfを求める加振パルス演算部147とを備えることにより、適切な加振パルス列Pfを演算によって求めることができるので、振動状態(特に振幅)を検出するためのセンサなどが不要である。
【0117】
また、従来のように、センサからの入力を得て、次回の加振パルスを決定する場合に比べて、振動を容易に予測・制御可能であるので、過励磁におけるオーバーシュートの発生を抑制することができる。
【0118】
次に、収束期間を短縮する手法について説明する。
【0119】
本実施の形態における電磁フィーダ1では、収束期間においても、起動期間における理論を採用する。すなわち、運動量Mで振動しているトラフ8に、逆向きの停止力積SWを与えて停止させる。
【0120】
ここで、停止力積SWの与え方は、加振パルス列Pfの場合と同様に、様々な手法が考えられる。本実施の形態においては、1個の制振パルスからなる制振パルス列Psによって停止力積SWを与える手法を採用するが、もちろん複数の制振パルスによって与えてもよい。
【0121】
まず、制振パルス設定部142は、トラフ8の振動波形に応じて、制振パルス列Psを与える時刻を決定する。本実施の形態では、定常搬送期間が終了した直後、トラフ8の振動の変位が「0」となるタイミングで制振パルス列Psを与える。換言すればトラフ8の振動の速度v(t)が電磁石23から遠ざかる方向に最大となるタイミングで与えればよい。具体的には、最後の加振パルスが与えられてから半周期が経過した後に与えればよいので、n番目の加振パルスが最後の加振パルスであったとすると、制振パルス列Psを与える時刻tは、数26で求まる。
【0122】
【数26】
【0123】
半周期の間にも振動は減衰するので、この減衰量を「D」とおくと、減衰量Dは数11より数27で近似できる。ただし、減衰量Dは近似式ではなく、演算により求めてもよい。
【0124】
【数27】
【0125】
したがって、制振パルス列Psを与える時刻における運動量Mは、数28で求まる。
【0126】
【数28】
【0127】
停止力積SWを生じさせる電磁力を停止電磁力SFとおくと、制振パルスのパルス幅tsを用いて、停止力積SWは数29で表される。
【0128】
【数29】
【0129】
運動量Mの絶対値と停止力積SWの値が等しいので、数28および数29から数30が求まる。
【0130】
【数30】
【0131】
制振パルス列Psによって発生させるべき停止電磁力SFが求まれば、加振パルス列Pfと同様に、制振パルス列Psが求まる。
【0132】
このように、本実施の形態における電磁フィーダ1では、制振パルス設定部142によって、トラフ8の振動を停止させるための制振パルス列Psが与えられるので、自然減衰によって停止させる場合に比べて、収束期間が短縮される。
【0133】
以上のように、本実施の形態に係る電磁フィーダ1は、トラフ8の振幅を、加振パルス列Pfを構成する各加振パルスによって成長させるための成長力積GWnを求めるとともに、トラフ8の運動量の減衰量Dnを、各加振パルスによって補うための補完力積DWnを求め、成長力積GWnと補完力積DWnとに基づいて、加振パルス列を求めることにより、振動センサ等の構成が不要となる。したがって、装置構成が簡素化され、コストが低減される。
【0134】
また、演算によって求められる加振パルス列Pfによって振動を制御(オープンループ制御)することにより、試行錯誤的な制御に比べて、過励磁におけるオーバーシュート等の発生を抑制することができる。また、タイムラグによる誤制御を抑制することができる。
【0135】
また、最後の加振パルスが与えられた後、振動の変位Xが「0」となるタイミングや、振動の速度v(t)が最大となるタイミングといった、最も適切なタイミングで制振パルス列Psを与えることができる。そのため、トラフ8の振動を素早く効果的に停止させることが可能となり、ひいては間欠運動のサイクルタイムを向上することができる。
【0136】
また、本実施の形態に係る電磁フィーダ1によれば、1回の搬送期間に対して1個のみの制振パルスからなる制振パルス列Psが設定される。従って、1回の搬送期間に対して複数個の制振パルスが設定された場合の弊害(例えば2個目以降の制振パルスの印加タイミングがずれて制振ではなく加振がされてしまうといった弊害)の発生を回避することができる。
【0137】
また、本実施の形態に係る電磁フィーダ1を備えた組合せ計量装置2によれば、電磁フィーダ1からプールホッパ9への物品の搬送量が精度良く制御された計量装置を得ることができる。
【0138】
また、トラフ8の振動を素早く起動・停止できることから、物品の供給時間の短縮化が図られて、計量サイクルタイムを向上することができる。
【0139】
さらに、搬送期間終了時にトラフ8の振動を素早く停止できることから、搬送期間終了後に物品がプールホッパ9へ供給され続けることがない。従って、搬送期間終了後にプールホッパ9が閉まる際に、電磁フィーダ1から供給されてきた物品がプールホッパ9に詰まること(いわゆるプールホッパへの物品の噛み込み)を防止することができる。
【0140】
<2. 変形例>
以上、本発明の実施の形態について説明してきたが、本発明は上記実施の形態に限定されるものではなく様々な変形が可能である。
【0141】
例えば、トラフ8の振動の変位Xが「0」となるタイミングを数式を用いた演算によって求めたが、電磁フィーダ1のデータ記憶容量に余裕がある場合は、テーブル値制御によって求めてもよい。すなわち、トラフ8の振動の振幅や加振パルス列Pfの周波数及びパルス幅等を様々に変化させて、トラフ8の振動の変位Xが「0」となるタイミングを各条件ごとに記述したテーブルを予め作成しておく。そして、フィーダ制御装置30がそのテーブルのデータを保持し、現在与えられている条件に応じて、搬送期間が終了した直後に変位Xが「0」となるタイミングをテーブルから割り出し、そのタイミングで制振パルス列Psを印加する。このような方式によっても、上記と同様の効果を得ることができる。
【0142】
また、実際に物品を搬送する際には、物品とトラフ8との間の摩擦力などによって電磁フィーダ1の減衰量Dnが大きくなることがあり、目標振幅r0が意図した通りに得られない事がある。目標振幅r0を得るためにはより大きな補完力積DWnが必要となる。また、補完力積DWnが大きくなる事で成長力積GWnが不足する事になり、振幅の立ち上がりも悪化する事がある。この現象は、共振周波数で駆動するときに顕著に生じる。
【0143】
そこで、予備実験等で物品とトラフ8の組合せによって、減衰量Dnの増加量を求めておくこととし、この値を用いて加振パルス列Pfを再計算することで、不足した補完力積DWnを補充する事が可能となる。また、成長力積GWnの確保も可能となる。その結果、物品がトラフ8上に乗ったとしても目標とする振幅を維持する事が可能で、振幅の立ち上がりの速さも回復する事ができる。
【0144】
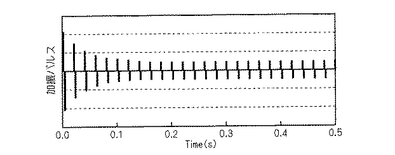
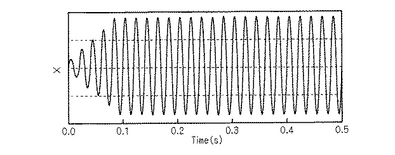
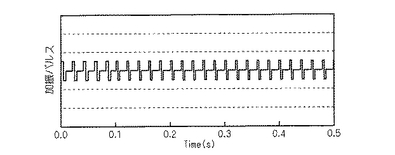
また、上記実施の形態において説明したように、加振パルス列Pfの与え方は種々の手法が考えられる。例えば、初期の加振パルスは、最大電圧を使用するようにしてもよい。図10は、このような加振パルス列Pfの例を示す図である。また、図11は、図10に示す加振パルス列Pfによって制御した場合のトラフ8の振幅の例を示す図である。このような加振パルス列Pfを与えることによって、図7に示すような加振パルス列Pfを与える場合に比べて、早く定常状態にすることができる。このとき、必要とされる加振パルス(値を大きく設定する加振パルス)の数は、目標振幅r0、成長力積GWn、補完力積DWnから算出可能である。
【0145】
また、初期の加振パルスは、パルス幅tpの値を大きく設定してもよい。図12は、このような加振パルス列Pfの例を示す図である。また、図13は、図12に示す加振パルス列Pfによって制御した場合のトラフ8の振幅の例を示す図である。このような加振パルス列Pfを与えた場合も、図6に示すような加振パルス列Pfを与える場合(図7)に比べて、早く定常状態にすることができる。このときも、必要とされる加振パルス(tpを大きく設定する加振パルス)の数は、目標振幅r0、成長力積GWn、補完力積DWnから算出可能である。
【図面の簡単な説明】
【0146】
【図1】本発明の実施の形態に係る電磁フィーダを備えた組合せ計量装置の概略構成を示す側面図である。
【図2】電磁フィーダの構成を具体的に示す側面図である。
【図3】制御部と他の構成との接続を示すバス配線図である。
【図4】主にCPUがプログラムに従って動作することによって実現される機能構成を示すブロック図である。
【図5】加振パルス設定部の詳細を示すブロック図である。
【図6】加振パルス列の例を示す図である。
【図7】図6に示す電圧が印加されることによるトラフの変位を例示する図である。
【図8】本実施の形態における加振パルス列の例を示す図である。
【図9】図8に示す加振パルス列によって加振されたトラフの変位を例示する図である。
【図10】変形例における加振パルス列の例を示す図である。
【図11】図10に示す加振パルス列によって加振されたトラフの変位を例示する図である。
【図12】変形例における加振パルス列の例を示す図である。
【図13】図12に示す加振パルス列によって加振されたトラフの変位を例示する図である。
【符号の説明】
【0147】
1 電磁フィーダ(搬送装置)
10 計量ホッパ
100 パラメータデータ
13 制御部
14 CPU
141 加振パルス設定部
142 制振パルス設定部
143 制御パルス生成部
145 成長量演算部
146 減衰量演算部
147 加振パルス演算部
15 記憶装置
2 組合せ計量装置
23 電磁石
25 板バネ
30 フィーダ制御装置
31 直流電源
32 スイッチング素子
8 トラフ
ζ 減衰比
DWn 補完力積
D,Dn 減衰量
GWn 成長力積
Mmax 最大運動量
Pc 制御パルス列
Pf 加振パルス列
Ps 制振パルス列
SW 停止力積
Wn 加振力積
f0 共振周波数
m 質量
r0 目標振幅
tp,ts パルス幅
【技術分野】
【0001】
本発明は、物品を振動により搬送する技術に関する。より詳しくは、搬送振動を制御する技術に関する。
【背景技術】
【0002】
計量装置等においては、供給された物品を計量ホッパ等へ移送するために、例えば電磁フィーダ(搬送装置)が備えられる。各電磁フィーダは、例えばベース部材に前後一対のバネ体を介して取り付けられたトラフと、上記ベース部材に設置された電磁石と、電磁石に通常搬送期間中、間欠的に通電する通電制御手段とを有している。そしと、電磁フィーダは、電磁石で電磁力を間欠的に発生させて、その発生時に上記バネ体を撓ませながらトラフを一方に変位させ、また、その非発生時に上記バネ体の弾性復元力によってトラフを他方に変位させることにより、トラフを振動させてトラフ上の物品を所定方向へ移送するように構成されたものである。
【0003】
この種の電磁フィーダが複数設けられた例えば組合せ計量装置等において、計量精度及び装置の効率や組合せ計算の効率を上げることにより稼働率の向上を図るには、電磁フィーダから計量ホッパへの物品供給量の精度を向上させる必要がある。すなわち、電磁フィーダの搬送振動を高精度に制御する必要がある。
【0004】
【特許文献1】特開平09−235016号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところが、電磁フィーダを意図したとおりに駆動させる場合、トラフが定常振動している状態(定常状態)の前後に発生する過渡的な振動をいかに抑制するか、すなわち、過渡期をいかに短く、かつ、その間の挙動をいかに許容される範囲に収めるかという問題があった。特に、振動の開始時において、振動状態を迅速に定常状態にしなければならないという問題があった。
【0006】
これを解決する手法として、例えば電磁フィーダの電磁石を過励磁させることが考えられる。過励磁とは、トラフの振動を開始させるときに、定常状態において電磁石に与える電圧(定常電圧)よりも大きな電圧(過電圧)を印加することにより、強い電磁力を発生させて、振動させる手法である。これによって、トラフが目標振幅に到達する期間が短縮され、定常状態になった時点で印加する電圧を定常電圧とすることにより、トラフの振動を迅速に定常状態に安定させることができる。
【0007】
しかし、過励磁を行う場合でも、どの程度の過電圧をどのくらいの期間印加すべきか、あるいは、どの周波数で与えるのが適切かという問題がある。すなわち、各パラメータをどのように決定するかという問題がある。例えば、過度の過励磁によって、オーバーシュート(目標振幅よりも振幅が大きくなる現象)が発生すると、かえって定常状態に到達するのが遅れるだけでなく、電磁フィーダを破壊するおそれもある。一方、過小な過励磁では定常状態に到達するまでの期間が長くなってしまい、過励磁を行う効果が低下する。また、電圧を印加する際の周波数が不適切であれば、電磁力が振動を減衰させてしまい(アンダーシュート)、定常状態に到達するのが遅れる原因となる。
【0008】
従来では、振動センサを設けて、過渡期の振幅を検出しつつ、フィードバック制御によって印加する電圧を決定する手法が提案されているが、タイムラグによる誤制御や、装置構成が複雑化するなどの問題がある。
【0009】
本発明は、上記課題に鑑みなされたものであり、搬送装置の振動を適切に制御することを目的とする。
【課題を解決するための手段】
【0010】
上記の課題を解決するため、請求項1の発明は、加振パルス列の印加に基づく電磁石の間欠通電により振動部を振動させることによって、物品を搬送する搬送装置であって、目標振幅に基づいて、前記加振パルス列を予め設定する加振パルス設定手段と、前記加振パルス設定手段により設定された前記加振パルス列に基づいて、前記電磁石への通電を制御する通電制御手段とを備え、前記加振パルス設定手段は、前記加振パルス列を構成する各加振パルスによって、前記振動部の振幅を成長させるための成長力積を求める成長量演算手段と、各加振パルスによって前記振動部の運動量の減衰量を補うための補完力積を求める減衰量演算手段と、前記成長量演算手段により求められた前記成長力積と、前記減衰量演算手段により求められた前記補完力積とに基づいて、前記加振パルス列を求める加振パルス演算手段とを備えることを特徴とする。
【0011】
また、請求項2の発明は、請求項1の発明に係る搬送装置であって、前記成長力積演算手段は、前記振動部が目標振幅で振動する際の最大運動量を演算し、前記最大運動量を所定のパターンに応じて各加振パルスに分配することにより、前記成長力積を演算することを特徴とする。
【0012】
また、請求項3の発明は、請求項1または2の発明に係る搬送装置であって、前記減衰量演算手段は、前記加振パルス列の各周期ごとに、前記振動部の運動量の減衰量を演算することによって前記補完力積を求めることを特徴とする。
【0013】
また、請求項4の発明は、請求項1ないし2のいずれかの発明に係る搬送装置であって、前記加振パルス演算手段は、前記成長力積と前記補完力積とを加算した値が、各加振パルスによって前記振動部に与えられる加振力積となるように、前記加振パルス列を演算することを特徴とする。
【0014】
また、請求項5の発明は、請求項1ないし4の発明に係る搬送装置であって、前記加振パルス演算手段は、前記加振パルス列の周波数を、前記振動部に固有の共振周波数とすることを特徴とする。
【0015】
また、請求項6の発明は、請求項1ないし5のいずれかの発明に係る搬送装置であって、搬送期間終了後に前記振動部の振動を停止させるための制振パルス列を設定する制振パルス設定手段をさらに備え、前記制振パルス設定手段は、前記振動部の振動の波形に基づいて、前記制振パルスを印加するタイミングを設定し、前記通電制御手段は、前記搬送期間終了時の前記電磁石への通電を、前記制振パルス設定手段で設定された前記制振パルスによって制御することを特徴とする。
【0016】
また、請求項7の発明は、物品を計量して組み合わせる組合せ計量装置であって、加振パルス列の印加に基づく電磁石の間欠通電により振動部を振動させることによって、物品を搬送する複数の搬送装置と、前記複数の搬送装置によって搬送される物品をそれぞれ計量する複数の計量手段とを備え、前記搬送装置が、目標振幅に基づいて、前記加振パルス列を予め設定する加振パルス設定手段と、前記加振パルス設定手段により設定された前記加振パルス列に基づいて、前記電磁石への通電を制御する通電制御手段とを備え、前記加振パルス設定手段は、前記加振パルス列を構成する各加振パルスによって、前記振動部の振幅を成長させるための成長力積を求める成長量演算手段と、各加振パルスによって前記振動部の運動量の減衰量を補うための補完力積を求める減衰量演算手段と、前記成長量演算手段により求められた前記成長力積と、前記減衰量演算手段により求められた前記補完力積とに基づいて、前記加振パルス列を求める加振パルス演算手段とを備えることを特徴とする。
【発明の効果】
【0017】
請求項1ないし7に記載の発明では、加振パルス列を構成する各加振パルスによって、振動部の振幅を成長させるための成長力積を求め、各加振パルスによって振動部の運動量の減衰量を補うための補完力積を求め、これらの値に基づいて、加振パルス列を求めることにより、振動状態を検出するセンサなどの機構が不要である。
【0018】
請求項5に記載の発明では、加振パルス列の周波数を、振動部に固有の共振周波数とすることにより、加振パルス列について、適切な周波数を容易に決定することができる。
【0019】
請求項6に記載の発明では、振動部の振動の波形に基づいて、搬送期間終了時に振動部の振動を停止させるための制振パルス列を設定することにより、搬送期間が終了したときに、迅速に振動部の振動を停止することができる。
【発明を実施するための最良の形態】
【0020】
以下、本発明の好適な実施の形態について、添付の図面を参照しつつ、詳細に説明する。
【0021】
<1. 第1の実施の形態>
図1は、本発明の第1の実施の形態に係る電磁フィーダ1を備えた組合せ計量装置2の概略構成を示す側面図である。また、図2は、電磁フィーダ1の構成を具体的に示す側面図である。図1を参照して、組合せ計量装置2は、機台3の中央に加振機4を介して設置され、上方の筒状の投入シュート5から投下された被計量物を周囲に分散する分散テーブル6と、その周囲に複数の加振機7のそれぞれを介して放射状に配設され、被計量物を搬送する複数のトラフ8と、複数のトラフ8の先端部下方にそれぞれ位置するように放射状に配設された複数のプールホッパ9と、複数のプールホッパ9のそれぞれの下方に配設された複数の計量ホッパ10とを備えている。ここで、電磁フィーダ1は、加振機7及びトラフ8を含む。
【0022】
そして、機台3の内部には、各プールホッパ9の各ゲート9a及び各計量ホッパ10の各ゲート10aの開閉を制御する、複数のゲート開閉装置11が配設されている。ゲート開閉装置11は、図示しないモータによって駆動され、被計量物の排出指令を受けたときに、図示しない駆動手段により計量ホッパ10内の被計量物を集合シュート12内に排出させ、空になった計量ホッパ10内にプールホッパ9内の被計量物を投入させるように動作する。また、計量ホッパ10には、図示しない重量検出器が機台3内で連設されており、計量ホッパ10内の被計量物の重量を計量する。
【0023】
図2を参照して、電磁フィーダ1が備える加振機7は、複数のコイルスプリング21を介して機台3上に設置されたベース部材22と、ベース部材22の上面上に設置された電磁石23と、ベース部材22の前部側(図面右側)及び後部側(図面左側)にボルト24によって後傾姿勢で平行に取り付けられた一対の板バネ25とを有している。但し、一対の板バネ25は必ずしも平行に取り付けられている必要はない。これら両板バネ25の各上部には、トラフ8のブラケット8aがボルト26によって固定されている。また、ブラケット8aにおける電磁石23の磁力発生面23aに対向する面には、磁性体27が取り付けられている。電磁石23には、後述するフィーダ制御装置30によって間欠的に通電がなされる。
【0024】
電磁石23に通電がなされると、磁力発生面23aと磁性体27との間に電磁力(吸引力)が作用し、その結果、前後の板バネ25が撓みながら、またこれと同時にトラフ8がやや沈み込みながら、後方(図面左側)に変位することとなる。つまり、板バネ25が固定されて弾性部材として機能するトラフ8が、後方に変位することとなる。一方、電磁石23への通電が停止されると、磁力発生面23aと磁性体27との間の電磁力(吸引力)が消失し、トラフ8が、板バネ25の弾性復元力によって上方へやや浮き上がりながら前方(図面右側)に変位することとなる。
【0025】
したがって、電磁石23に間欠的に通電がなされることによって電磁力が間欠的に発生し、これにより、トラフ8が前後方向に振動することとなる。このとき、電磁石23に発生する電磁力は、フィーダ制御装置30からの通電時の電圧値によって決まる。すなわち、電圧Eと電磁力Fとの関係式は予め決定される。
【0026】
トラフ8が振動すると、トラフ8上の物品(被計量物、被搬送物)が図1に示したプールホッパ9に移送される。また、予め定められた物品の搬送期間が終了すると、トラフ8の振動を停止させることにより、電磁フィーダ1からプールホッパ9への物品の移送が停止される。
【0027】
上記の通り、組合せ計量装置2において、電磁フィーダ1からプールホッパ9への物品供給量の精度を向上させるためには、物品が搬送される期間(すなわち、トラフ8が振動している期間、以下、「物品搬送期間」と称する)の長さと、その間の振動の強度(主にトラフ8の振幅)を精度よく制御することが重要となる。
【0028】
図3は、制御部13と他の構成との接続を示すバス配線図である。図1では、図示を省略しているが、組合せ計量装置2は操作部16と、オペレータにデータを表示するディスプレイ17とをさらに備えている。
【0029】
制御部13は、主にCPU14と記憶装置15から構成され、一般的なコンピュータとしての機能を備えている。CPU14は、記憶装置15に記憶されたプログラムに従って、各種データを処理することにより、組合せ計量装置2の他の構成を制御するための制御信号等を生成する。CPU14は、このような制御信号をバス配線を介して送信することによって各構成を制御する。記憶装置15は、CPU14の一時的なワーキングエリアとして使用されるRAM、読み取り専用のROMおよびハードディスク装置などから構成され、プログラムや操作部16から入力されたデータ等が記憶される。
【0030】
操作部16は、キーボード16aおよびマウス16bから構成され、オペレータからの指示を入力するために使用される。オペレータが操作部16を操作することによって、組合せ計量装置2には、各種パラメータやプログラム、あるいは指示等が入力される。なお、操作部16としては、各種ボタン類やタッチパネルなどが採用されてもよい。
【0031】
図4は、主にCPU14がプログラムに従って動作することによって実現される機能構成を示すブロック図である。図4において、加振パルス設定部141、制振パルス設定部142および制御パルス生成部143が、主にCPU14によって実現される機能構成である。なお、CPU14は、プログラムに従って動作することによって、これらの機能構成を実現するが、これらの全部または一部を専用の回路によってハードウェア的に実現してもよい。
【0032】
図4に示すパラメータデータ100とは、組合せ計量装置2に予め与えられている設定データや初期値等のデータであって、主に操作部16から入力され、記憶装置15に記憶されている。なお、パラメータデータ100には、振動部の質量m、振動部の共振周波数f0、振動部の減衰比ζ、および目標振幅r0等が含まれている。これらの値は、例えば予め実験により求めておくことができる。
【0033】
加振パルス設定部141は、パラメータデータ100を参照しつつ、電磁フィーダ1のトラフ8を振動させるための加振パルス列Pfを設定して、制御パルス生成部143に伝達する。
【0034】
図5は、加振パルス設定部141の詳細を示すブロック図である。加振パルス設定部141は、成長量演算部145、減衰量演算部146および加振パルス演算部147を備える。
【0035】
成長量演算部145は、定常振動状態における最大運動量Mmaxを演算する。最大運動量Mmaxとは、トラフ8が目標振幅r0で振動している状態において、速度が最大となっている時刻nT(T:振動周期)における運動量である。
【0036】
なお、振動している物体において、速度が最大となるときの変位は「0」である。すなわち、与えた電磁力の位置エネルギへの寄与分は「0」である。したがって、このとき板バネ25を考慮する必要はない。
【0037】
また、成長量演算部145は、各加振パルスによって振動を成長させるために与える力積(以下、「成長力積GWn」)を決定して、減衰量演算部146および加振パルス演算部147に伝達する。
【0038】
減衰量演算部146は、加振パルス列の1周期の間の減衰量(以下、「減衰量Dn」)を求め、これに相当する力積(以下、「補完力積DWn」)の値を求めて加振パルス演算部147に伝達する。
【0039】
加振パルス演算部147は、成長力積GWnと補完力積DWnとに基づいて、加振パルスによって与えるべき力積Wnを求める。さらに、求めた力積Wnに基づいて、各加振パルスを求め、これによって加振パルス列Pfを求める。
【0040】
加振パルス設定部141は、加振パルス演算部147によって求められた加振パルス列Pfを制御パルス生成部143に出力する。
【0041】
図4に戻って、制振パルス設定部142は、電磁フィーダ1による物品の搬送を停止させるための制振パルス列Psを演算により求め、制御パルス生成部143に出力する。
【0042】
制御パルス生成部143は、加振パルス列Pfおよび制振パルス列Psに応じた制御パルス列Pcを生成して出力する。制御パルス生成部143から出力された制御パルス列Pcはスイッチング素子32に入力され、制御パルスが入力されている期間、スイッチング素子32は導通状態となって、直流電源31が電磁石23に通電される。これにより、トラフ8の振動が制御される。
【0043】
つまり、制御パルス生成部143及びスイッチング素子32は、直流電源31から電磁石23への通電を、加振パルス列Pfまたは制振パルス列Psによって制御する通電制御手段として機能する。
【0044】
以上が本実施の形態における組合せ計量装置2の機能および構成の説明である。なお、上記説明では、制御部13は組合せ計量装置2に1つ備えられているように記載しているが、より詳細には各電磁フィーダ1について制御部13の機能が実現されている。また、各電磁フィーダ1に制御部13と同等の機能構成が設けられていてもよい。
【0045】
次に、本実施の形態に係る電磁フィーダ1を備えた組合せ計量装置2に関して、トラフ8の振動を制御する理論について説明する。
【0046】
図6は、加振パルス列の例を示す図である。このような加振パルス列では、電磁石に与えられる各パルス電圧の電圧値は等しくなる。すなわち、図6に示す加振パルス列では過励磁は行われない。図7は、図6に示す加振パルス列によるトラフ8の変位を示す図である。変位は、電磁石23に通電がなされず板バネ25が変形していない時のトラフ8の初期位置を「0」としている。また、最初の加振パルスを与える時刻を「0」とする。
【0047】
以下、加振電圧を印加して振動を開始してから、定常振動状態になるまでの期間を起動期間、定常振動状態になってから加振電圧の印加を停止するまでの期間を定常搬送期間、加振電圧の印加を停止してから振動が停止するまでの期間を収束期間とそれぞれ定義する。
【0048】
電磁フィーダ1においては、トラフ8が振動している間、物品が搬送される。すなわち、起動期間、定常搬送期間および収束期間を合計した期間(物品搬送期間)の間は物品が搬送される。
【0049】
先述のように、定常搬送期間の間は、トラフ8の振幅が一定となる定常振動状態である。電磁フィーダ1の搬送量はトラフ8の振幅に依存するため、定常搬送期間における物品の搬送量(プールホッパ9への供給量)は、ほぼ時間に比例し、比較的高精度に制御することができる。
【0050】
しかし、起動期間および収束期間においては、トラフ8の振幅が安定しないため、物品の供給量は比較的制御しにくい。図6に示す例では、起動期間においては、定常電圧を印加しているにもかかわらず、トラフ8の振幅が徐々にしか上昇しないために、実際の供給量が意図した供給量よりも少量となる。また、定常電圧の印加を停止しても、振動は直ちに停止することはなく、収束期間においてトラフ8の振動が継続することによって物品が搬送されてしまい、供給量が増加する。
【0051】
このことから、電磁フィーダ1においては、起動期間および収束期間を可能な限り短くすることが重要となる。
【0052】
まず、起動期間を短縮する手法について説明する。
【0053】
定常振動状態(定常搬送期間)における振動の振幅は目標振幅r0であるから、定常振動状態における変位X(t)は、共振周波数f0を用いて、数1で表すことができる。
【0054】
【数1】
【0055】
したがって、定常振動状態における速度v(t)は、数2で表すことができる。
【0056】
【数2】
【0057】
定常状態の最大速度Vmaxは時刻nTにおける速度であるから、最大速度Vmaxは数3で求まる。
【0058】
【数3】
【0059】
最大速度Vmaxが求まると、最大運動量Mmaxは数4で求まる。
【0060】
【数4】
【0061】
電磁フィーダ1は、静止しているトラフ8を目標振幅r0で定常振動させるために、最大運動量Mmaxに相当する力積GWを電磁石23によって与える。この力積GWの与え方は、種々の手法が考えられる。例えば、1個の加振パルスによって与えてもよい。
【0062】
本実施の形態における電磁フィーダ1では、複数の加振パルスによって最大運動量Mmaxに相当する力積GWを与える。すなわち、n番目の加振パルスによって与える成長力積GWnを用いると、数5で表される。
【0063】
【数5】
【0064】
また、本実施の形態における電磁フィーダ1では、最初に電磁力Fmaxを与えて強く加振し、その後徐々に振幅を増加させる手法を採用する。すなわち、成長力積GWnを与える電磁力を電磁力GFn、加振パルスのパルス幅をパルス幅tpとおくと、成長力積GWnを数6で示すように与える。
【0065】
【数6】
【0066】
なお、数6における「A」は、振幅の立ち上がりを調整するための無次元のパラメータであって任意に与えることができる。したがって、n個の加振パルスによって力積GWを与えるとすると、数4ないし数6から、Fmaxは数7で求まる。
【0067】
【数7】
【0068】
すなわち、成長量演算部145は、目標振幅r0が与えられると、数7を演算してFmaxを求め、数6で示す成長力積GWnを減衰量演算部146および加振パルス演算部147に伝達する。
【0069】
最初の加振パルスによって、一旦振動を開始したトラフ8は、次の加振パルスが与えられるまでの間(1周期の間)に減衰する。電磁フィーダ1において、振動の減衰量は加振パルスによって補われる。すなわち、加振パルス列の1周期ごとに減衰量を補う必要があるので、減衰量演算部146は、1周期ごとの減衰量Dnを求める必要がある。
【0070】
ここで、振動が自然減衰する場合を考える。振幅rn-1の振動が減衰する場合、1周期後の振幅rnは、減衰比ζを用いて、数8で近似することができる。
【0071】
【数8】
【0072】
また、減衰によって周波数は変化しないと近似できるので、振幅rnの振動における最大速度Vnは、数3と同様に数9で求まる。
【0073】
【数9】
【0074】
したがって、ある振動状態から1周期の間(n−1番目の加振パルスを与えてからn番目の加振パルスを与えるまでの間)の運動量の減衰量Dnは、数10で表される。
【0075】
【数10】
【0076】
さらに、数10に数8を代入することによって、数11が得られる。
【0077】
【数11】
【0078】
ここで、n番目の加振パルスを加えた時点での運動量Mnを用いて、その振動の振幅rnを表すと、数4から数12が求まる。
【0079】
【数12】
【0080】
数11に数12を代入すると数13が求まる。
【0081】
【数13】
【0082】
なお、最初の加振パルスが与えられるまでトラフ8は静止しており、最初の加振パルスを与えるときには減衰量は考慮しなくてよいので、「D1=0」である。
【0083】
したがって、減衰量Dnを補うために、n番目の加振パルスによって電磁石23から与えなければならない補完力積DWnは、数14で求まる。
【0084】
【数14】
【0085】
ここで、n番目の加振パルスによって与える電磁力Fnとおくと、n番目の加振パルスによって与えられる力積(Fn・tp)と、n−1番目の加振パルスが与えられてからn番目の加振パルスが与えられるまでの減衰量Dnとを用いて、運動量Mnは、数15と表すことができる。
【0086】
【数15】
【0087】
詳細は後述するが、加振パルスによって与える電磁力Fnは、振動を成長させるための成長電磁力GFnと、減衰量を補うための補完電磁力DFnとを加算したものである。
【0088】
したがって、数15は数16に変形される。
【0089】
【数16】
【0090】
また、減衰量Dnは、数14に示すように補完力積DWnに相当するので、補完電磁力DFnを用いて、数17で表せる。
【0091】
【数17】
【0092】
したがって、数16に数17を代入して、数18が得られる。
【0093】
【数18】
【0094】
ただし、最初の加振パルスによって与えられる電磁力F1には、減衰量を補う分の減衰電磁力は「0」なので、「GF1=F1=Fmax」である。
【0095】
数18を数14に代入すると、補完力積DWnは、数19で表される。
【0096】
【数19】
【0097】
さらに、数6を数19に代入すると、数20が求まる。
【0098】
【数20】
【0099】
ただし、「DW1=0」である。
【0100】
このように、減衰量演算部146は、成長量演算部145から成長力積GWnを入力として得て、記憶する。さらに、前回までに、記憶しておいた成長力積GWn-1と、パラメータデータ100に含まれる減衰比ζとに基づいて、数20を演算することによって補完力積DWnを求めて、加振パルス演算部147に伝達する。
【0101】
加振パルス演算部147は、成長量演算部145から得られる成長力積GWnと、減衰量演算部146から得られる補完力積DWnとに基づいて、n番目の加振パルスによって与える加振力積Wnを求める。すなわち、数21によって、加振力積Wnを求める。
【0102】
【数21】
【0103】
さらに、加振力積Wnから各加振パルスによって電磁石23に発生させる電磁力Fnを数22により求める。
【0104】
【数22】
【0105】
なお、電磁力Fは、電圧Eを印加することによって電磁石23に発生する電磁力であるから、電圧Eと電磁力Fとの関係式F(E)は、電磁石23の特性として予め求めておくことができる。
【0106】
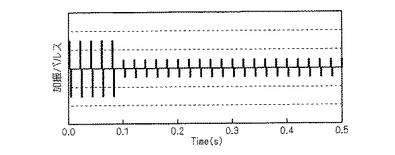
図8は、本実施の形態における加振パルス列Pfの例を示す図である。すなわち、本実施の形態における電磁フィーダ1では、加振パルス演算部147によって、図8に示すような加振パルス列Pfが求められる。なお、図8に示す加振パルス列Pfによって与えられる電圧Eは、数23によって示される。
【0107】
【数23】
【0108】
なお、数23における「B」は、振幅の立ち上がりを調整するための無次元のパラメータであって、数6における「A」の値に応じて任意に与えることができる。
【0109】
1番目の加振パルスによって印加される電圧Emaxは、1番目の加振パルスによって発生する電磁力を発生させるから、電圧Emaxは数24で求めることができる。
【0110】
【数24】
【0111】
また、定常振動状態(目標振幅r0)においては、成長電磁力GFnはすでに「0」であることから、電圧Eminは、数25で求めることができる。
【0112】
【数25】
【0113】
加振パルス演算部147は、電圧Eに応じて、与えるべき加振パルスについても予め求めておくことができる(加振パルスと電圧Eとの関係式は既知である)。すなわち、数22によって、必要な電磁力Fが求まれば、その電磁力Fを電磁石23に発生させるための加振パルスを求めることができる。
【0114】
このように、加振パルス設定部141は、加振パルス演算部147により各加振パルスを求めることによって、加振パルス列Pfを演算によって求め、制御パルス生成部143に伝達する。
【0115】
図9は、図8に示す加振パルス列によって加振されたトラフ8の変位を示す図である。図7に示す例では、起動期間が9秒程度(図示せず)であったが、図9から明らかなように、電磁フィーダ1では、0.1秒ほどで定常振動状態に到達しており、起動期間が短縮されている。
【0116】
このように、本実施の形態における電磁フィーダ1は、加振パルス列Pfを構成する各加振パルスごとに、トラフ8の振幅を成長させるための成長力積GWnを求める成長量演算部145と、トラフ8の運動量の減衰量Dnを求め、各加振パルスごとに、減衰量Dnを補うための補完力積DWnを求める減衰量演算部146と、成長力積GWnと補完力積DWnとに基づいて、加振パルス列Pfを求める加振パルス演算部147とを備えることにより、適切な加振パルス列Pfを演算によって求めることができるので、振動状態(特に振幅)を検出するためのセンサなどが不要である。
【0117】
また、従来のように、センサからの入力を得て、次回の加振パルスを決定する場合に比べて、振動を容易に予測・制御可能であるので、過励磁におけるオーバーシュートの発生を抑制することができる。
【0118】
次に、収束期間を短縮する手法について説明する。
【0119】
本実施の形態における電磁フィーダ1では、収束期間においても、起動期間における理論を採用する。すなわち、運動量Mで振動しているトラフ8に、逆向きの停止力積SWを与えて停止させる。
【0120】
ここで、停止力積SWの与え方は、加振パルス列Pfの場合と同様に、様々な手法が考えられる。本実施の形態においては、1個の制振パルスからなる制振パルス列Psによって停止力積SWを与える手法を採用するが、もちろん複数の制振パルスによって与えてもよい。
【0121】
まず、制振パルス設定部142は、トラフ8の振動波形に応じて、制振パルス列Psを与える時刻を決定する。本実施の形態では、定常搬送期間が終了した直後、トラフ8の振動の変位が「0」となるタイミングで制振パルス列Psを与える。換言すればトラフ8の振動の速度v(t)が電磁石23から遠ざかる方向に最大となるタイミングで与えればよい。具体的には、最後の加振パルスが与えられてから半周期が経過した後に与えればよいので、n番目の加振パルスが最後の加振パルスであったとすると、制振パルス列Psを与える時刻tは、数26で求まる。
【0122】
【数26】
【0123】
半周期の間にも振動は減衰するので、この減衰量を「D」とおくと、減衰量Dは数11より数27で近似できる。ただし、減衰量Dは近似式ではなく、演算により求めてもよい。
【0124】
【数27】
【0125】
したがって、制振パルス列Psを与える時刻における運動量Mは、数28で求まる。
【0126】
【数28】
【0127】
停止力積SWを生じさせる電磁力を停止電磁力SFとおくと、制振パルスのパルス幅tsを用いて、停止力積SWは数29で表される。
【0128】
【数29】
【0129】
運動量Mの絶対値と停止力積SWの値が等しいので、数28および数29から数30が求まる。
【0130】
【数30】
【0131】
制振パルス列Psによって発生させるべき停止電磁力SFが求まれば、加振パルス列Pfと同様に、制振パルス列Psが求まる。
【0132】
このように、本実施の形態における電磁フィーダ1では、制振パルス設定部142によって、トラフ8の振動を停止させるための制振パルス列Psが与えられるので、自然減衰によって停止させる場合に比べて、収束期間が短縮される。
【0133】
以上のように、本実施の形態に係る電磁フィーダ1は、トラフ8の振幅を、加振パルス列Pfを構成する各加振パルスによって成長させるための成長力積GWnを求めるとともに、トラフ8の運動量の減衰量Dnを、各加振パルスによって補うための補完力積DWnを求め、成長力積GWnと補完力積DWnとに基づいて、加振パルス列を求めることにより、振動センサ等の構成が不要となる。したがって、装置構成が簡素化され、コストが低減される。
【0134】
また、演算によって求められる加振パルス列Pfによって振動を制御(オープンループ制御)することにより、試行錯誤的な制御に比べて、過励磁におけるオーバーシュート等の発生を抑制することができる。また、タイムラグによる誤制御を抑制することができる。
【0135】
また、最後の加振パルスが与えられた後、振動の変位Xが「0」となるタイミングや、振動の速度v(t)が最大となるタイミングといった、最も適切なタイミングで制振パルス列Psを与えることができる。そのため、トラフ8の振動を素早く効果的に停止させることが可能となり、ひいては間欠運動のサイクルタイムを向上することができる。
【0136】
また、本実施の形態に係る電磁フィーダ1によれば、1回の搬送期間に対して1個のみの制振パルスからなる制振パルス列Psが設定される。従って、1回の搬送期間に対して複数個の制振パルスが設定された場合の弊害(例えば2個目以降の制振パルスの印加タイミングがずれて制振ではなく加振がされてしまうといった弊害)の発生を回避することができる。
【0137】
また、本実施の形態に係る電磁フィーダ1を備えた組合せ計量装置2によれば、電磁フィーダ1からプールホッパ9への物品の搬送量が精度良く制御された計量装置を得ることができる。
【0138】
また、トラフ8の振動を素早く起動・停止できることから、物品の供給時間の短縮化が図られて、計量サイクルタイムを向上することができる。
【0139】
さらに、搬送期間終了時にトラフ8の振動を素早く停止できることから、搬送期間終了後に物品がプールホッパ9へ供給され続けることがない。従って、搬送期間終了後にプールホッパ9が閉まる際に、電磁フィーダ1から供給されてきた物品がプールホッパ9に詰まること(いわゆるプールホッパへの物品の噛み込み)を防止することができる。
【0140】
<2. 変形例>
以上、本発明の実施の形態について説明してきたが、本発明は上記実施の形態に限定されるものではなく様々な変形が可能である。
【0141】
例えば、トラフ8の振動の変位Xが「0」となるタイミングを数式を用いた演算によって求めたが、電磁フィーダ1のデータ記憶容量に余裕がある場合は、テーブル値制御によって求めてもよい。すなわち、トラフ8の振動の振幅や加振パルス列Pfの周波数及びパルス幅等を様々に変化させて、トラフ8の振動の変位Xが「0」となるタイミングを各条件ごとに記述したテーブルを予め作成しておく。そして、フィーダ制御装置30がそのテーブルのデータを保持し、現在与えられている条件に応じて、搬送期間が終了した直後に変位Xが「0」となるタイミングをテーブルから割り出し、そのタイミングで制振パルス列Psを印加する。このような方式によっても、上記と同様の効果を得ることができる。
【0142】
また、実際に物品を搬送する際には、物品とトラフ8との間の摩擦力などによって電磁フィーダ1の減衰量Dnが大きくなることがあり、目標振幅r0が意図した通りに得られない事がある。目標振幅r0を得るためにはより大きな補完力積DWnが必要となる。また、補完力積DWnが大きくなる事で成長力積GWnが不足する事になり、振幅の立ち上がりも悪化する事がある。この現象は、共振周波数で駆動するときに顕著に生じる。
【0143】
そこで、予備実験等で物品とトラフ8の組合せによって、減衰量Dnの増加量を求めておくこととし、この値を用いて加振パルス列Pfを再計算することで、不足した補完力積DWnを補充する事が可能となる。また、成長力積GWnの確保も可能となる。その結果、物品がトラフ8上に乗ったとしても目標とする振幅を維持する事が可能で、振幅の立ち上がりの速さも回復する事ができる。
【0144】
また、上記実施の形態において説明したように、加振パルス列Pfの与え方は種々の手法が考えられる。例えば、初期の加振パルスは、最大電圧を使用するようにしてもよい。図10は、このような加振パルス列Pfの例を示す図である。また、図11は、図10に示す加振パルス列Pfによって制御した場合のトラフ8の振幅の例を示す図である。このような加振パルス列Pfを与えることによって、図7に示すような加振パルス列Pfを与える場合に比べて、早く定常状態にすることができる。このとき、必要とされる加振パルス(値を大きく設定する加振パルス)の数は、目標振幅r0、成長力積GWn、補完力積DWnから算出可能である。
【0145】
また、初期の加振パルスは、パルス幅tpの値を大きく設定してもよい。図12は、このような加振パルス列Pfの例を示す図である。また、図13は、図12に示す加振パルス列Pfによって制御した場合のトラフ8の振幅の例を示す図である。このような加振パルス列Pfを与えた場合も、図6に示すような加振パルス列Pfを与える場合(図7)に比べて、早く定常状態にすることができる。このときも、必要とされる加振パルス(tpを大きく設定する加振パルス)の数は、目標振幅r0、成長力積GWn、補完力積DWnから算出可能である。
【図面の簡単な説明】
【0146】
【図1】本発明の実施の形態に係る電磁フィーダを備えた組合せ計量装置の概略構成を示す側面図である。
【図2】電磁フィーダの構成を具体的に示す側面図である。
【図3】制御部と他の構成との接続を示すバス配線図である。
【図4】主にCPUがプログラムに従って動作することによって実現される機能構成を示すブロック図である。
【図5】加振パルス設定部の詳細を示すブロック図である。
【図6】加振パルス列の例を示す図である。
【図7】図6に示す電圧が印加されることによるトラフの変位を例示する図である。
【図8】本実施の形態における加振パルス列の例を示す図である。
【図9】図8に示す加振パルス列によって加振されたトラフの変位を例示する図である。
【図10】変形例における加振パルス列の例を示す図である。
【図11】図10に示す加振パルス列によって加振されたトラフの変位を例示する図である。
【図12】変形例における加振パルス列の例を示す図である。
【図13】図12に示す加振パルス列によって加振されたトラフの変位を例示する図である。
【符号の説明】
【0147】
1 電磁フィーダ(搬送装置)
10 計量ホッパ
100 パラメータデータ
13 制御部
14 CPU
141 加振パルス設定部
142 制振パルス設定部
143 制御パルス生成部
145 成長量演算部
146 減衰量演算部
147 加振パルス演算部
15 記憶装置
2 組合せ計量装置
23 電磁石
25 板バネ
30 フィーダ制御装置
31 直流電源
32 スイッチング素子
8 トラフ
ζ 減衰比
DWn 補完力積
D,Dn 減衰量
GWn 成長力積
Mmax 最大運動量
Pc 制御パルス列
Pf 加振パルス列
Ps 制振パルス列
SW 停止力積
Wn 加振力積
f0 共振周波数
m 質量
r0 目標振幅
tp,ts パルス幅
【特許請求の範囲】
【請求項1】
加振パルス列の印加に基づく電磁石の間欠通電により振動部を振動させることによって、物品を搬送する搬送装置であって、
目標振幅に基づいて、前記加振パルス列を予め設定する加振パルス設定手段と、
前記加振パルス設定手段により設定された前記加振パルス列に基づいて、前記電磁石への通電を制御する通電制御手段と、
を備え、
前記加振パルス設定手段は、
前記加振パルス列を構成する各加振パルスによって、前記振動部の振幅を成長させるための成長力積を求める成長量演算手段と、
各加振パルスによって前記振動部の運動量の減衰量を補うための補完力積を求める減衰量演算手段と、
前記成長量演算手段により求められた前記成長力積と、前記減衰量演算手段により求められた前記補完力積とに基づいて、前記加振パルス列を求める加振パルス演算手段と、
を備えることを特徴とする搬送装置。
【請求項2】
請求項1に記載の搬送装置であって、
前記成長力積演算手段は、
前記振動部が目標振幅で振動する際の最大運動量を演算し、前記最大運動量を所定のパターンに応じて各加振パルスに分配することにより、前記成長力積を演算することを特徴とする搬送装置。
【請求項3】
請求項1または2に記載の搬送装置であって、
前記減衰量演算手段は、前記加振パルス列の各周期ごとに、前記振動部の運動量の減衰量を演算することによって前記補完力積を求めることを特徴とする搬送装置。
【請求項4】
請求項1ないし3のいずれかに記載の搬送装置であって、
前記加振パルス演算手段は、
前記成長力積と前記補完力積とを加算した値が、各加振パルスによって前記振動部に与えられる加振力積となるように、前記加振パルス列を演算することを特徴とする搬送装置。
【請求項5】
請求項1ないし4のいずれかに記載の搬送装置であって、
前記加振パルス演算手段は、前記加振パルス列の周波数を、前記振動部に固有の共振周波数とすることを特徴とする搬送装置。
【請求項6】
請求項1ないし5のいずれかに記載の搬送装置であって、
搬送期間終了後に前記振動部の振動を停止させるための制振パルス列を設定する制振パルス設定手段をさらに備え、
前記制振パルス設定手段は、前記振動部の振動の波形に基づいて、前記制振パルスを印加するタイミングを設定し、
前記通電制御手段は、前記搬送期間終了時の前記電磁石への通電を、前記制振パルス設定手段で設定された前記制振パルスによって制御することを特徴とする搬送装置。
【請求項7】
物品を計量して組み合わせる組合せ計量装置であって、
加振パルス列の印加に基づく電磁石の間欠通電により振動部を振動させることによって、物品を搬送する複数の搬送装置と、
前記複数の搬送装置によって搬送される物品をそれぞれ計量する複数の計量手段と、
を備え、
前記搬送装置が、
目標振幅に基づいて、前記加振パルス列を予め設定する加振パルス設定手段と、
前記加振パルス設定手段により設定された前記加振パルス列に基づいて、前記電磁石への通電を制御する通電制御手段と、
を備え、
前記加振パルス設定手段は、
前記加振パルス列を構成する各加振パルスによって、前記振動部の振幅を成長させるための成長力積を求める成長量演算手段と、
各加振パルスによって前記振動部の運動量の減衰量を補うための補完力積を求める減衰量演算手段と、
前記成長量演算手段により求められた前記成長力積と、前記減衰量演算手段により求められた前記補完力積とに基づいて、前記加振パルス列を求める加振パルス演算手段と、
を備えることを特徴とする組合せ計量装置。
【請求項1】
加振パルス列の印加に基づく電磁石の間欠通電により振動部を振動させることによって、物品を搬送する搬送装置であって、
目標振幅に基づいて、前記加振パルス列を予め設定する加振パルス設定手段と、
前記加振パルス設定手段により設定された前記加振パルス列に基づいて、前記電磁石への通電を制御する通電制御手段と、
を備え、
前記加振パルス設定手段は、
前記加振パルス列を構成する各加振パルスによって、前記振動部の振幅を成長させるための成長力積を求める成長量演算手段と、
各加振パルスによって前記振動部の運動量の減衰量を補うための補完力積を求める減衰量演算手段と、
前記成長量演算手段により求められた前記成長力積と、前記減衰量演算手段により求められた前記補完力積とに基づいて、前記加振パルス列を求める加振パルス演算手段と、
を備えることを特徴とする搬送装置。
【請求項2】
請求項1に記載の搬送装置であって、
前記成長力積演算手段は、
前記振動部が目標振幅で振動する際の最大運動量を演算し、前記最大運動量を所定のパターンに応じて各加振パルスに分配することにより、前記成長力積を演算することを特徴とする搬送装置。
【請求項3】
請求項1または2に記載の搬送装置であって、
前記減衰量演算手段は、前記加振パルス列の各周期ごとに、前記振動部の運動量の減衰量を演算することによって前記補完力積を求めることを特徴とする搬送装置。
【請求項4】
請求項1ないし3のいずれかに記載の搬送装置であって、
前記加振パルス演算手段は、
前記成長力積と前記補完力積とを加算した値が、各加振パルスによって前記振動部に与えられる加振力積となるように、前記加振パルス列を演算することを特徴とする搬送装置。
【請求項5】
請求項1ないし4のいずれかに記載の搬送装置であって、
前記加振パルス演算手段は、前記加振パルス列の周波数を、前記振動部に固有の共振周波数とすることを特徴とする搬送装置。
【請求項6】
請求項1ないし5のいずれかに記載の搬送装置であって、
搬送期間終了後に前記振動部の振動を停止させるための制振パルス列を設定する制振パルス設定手段をさらに備え、
前記制振パルス設定手段は、前記振動部の振動の波形に基づいて、前記制振パルスを印加するタイミングを設定し、
前記通電制御手段は、前記搬送期間終了時の前記電磁石への通電を、前記制振パルス設定手段で設定された前記制振パルスによって制御することを特徴とする搬送装置。
【請求項7】
物品を計量して組み合わせる組合せ計量装置であって、
加振パルス列の印加に基づく電磁石の間欠通電により振動部を振動させることによって、物品を搬送する複数の搬送装置と、
前記複数の搬送装置によって搬送される物品をそれぞれ計量する複数の計量手段と、
を備え、
前記搬送装置が、
目標振幅に基づいて、前記加振パルス列を予め設定する加振パルス設定手段と、
前記加振パルス設定手段により設定された前記加振パルス列に基づいて、前記電磁石への通電を制御する通電制御手段と、
を備え、
前記加振パルス設定手段は、
前記加振パルス列を構成する各加振パルスによって、前記振動部の振幅を成長させるための成長力積を求める成長量演算手段と、
各加振パルスによって前記振動部の運動量の減衰量を補うための補完力積を求める減衰量演算手段と、
前記成長量演算手段により求められた前記成長力積と、前記減衰量演算手段により求められた前記補完力積とに基づいて、前記加振パルス列を求める加振パルス演算手段と、
を備えることを特徴とする組合せ計量装置。
【図1】

【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2006−225152(P2006−225152A)
【公開日】平成18年8月31日(2006.8.31)
【国際特許分類】
【出願番号】特願2005−44540(P2005−44540)
【出願日】平成17年2月21日(2005.2.21)
【出願人】(000147833)株式会社イシダ (859)
【Fターム(参考)】
【公開日】平成18年8月31日(2006.8.31)
【国際特許分類】
【出願日】平成17年2月21日(2005.2.21)
【出願人】(000147833)株式会社イシダ (859)
【Fターム(参考)】
[ Back to top ]