
搬送装置の位置決め機構
【課題】メンテナンスの際に搬送装置を容易に移動することを可能とし、かつ、再設置時に位置の再現性が得られるようにし、搬送ロボットのティーチングが不要とし、露光装置及びコータ・デベロッパの稼動停止時間の短縮を実現する。
【解決手段】装置固定台210と、装置固定台210の下面に固定された位置決め用突起部8a、8b、8cと、位置決め用突起部8a、8b、8cに対応する位置決め用突起受け部7a、7b、7cと、装置固定台210を鉛直方向に移動させるための昇降機構と、装置固定台210を水平移動させるための水平移動機構と、昇降機構を操作するための操作部とを含む搬送装置用位置決め機構を用いる。
【解決手段】装置固定台210と、装置固定台210の下面に固定された位置決め用突起部8a、8b、8cと、位置決め用突起部8a、8b、8cに対応する位置決め用突起受け部7a、7b、7cと、装置固定台210を鉛直方向に移動させるための昇降機構と、装置固定台210を水平移動させるための水平移動機構と、昇降機構を操作するための操作部とを含む搬送装置用位置決め機構を用いる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、半導体ウェーハの搬送装置に関する。
【背景技術】
【0002】
半導体ウェーハの製造工程においては、各種の製造装置の間で試料搬送が自動で行われる。
【0003】
試料は、FOUP(Front Opening Unified Pod)内に収納され、OHV(Overhead Hoist Vehicle)やAGV(Automatic Guided Vehicle)によって装置の間を搬送される。
【0004】
製造装置は、試料の処理及び検査を行う装置本体と、FOUPから試料を取り出し、本体側の所定の位置へ試料の搬送を行う搬送装置とに分けられる。また、露光装置などの大規模な装置においては、上位装置コータ・デベロッパから、直接、試料を露光装置へ搬送する搬送装置が設置されている。
【0005】
一般に、搬送装置は、クリーンな環境を備えたチャンバ内に試料を搬送するロボットが搭載され、このロボットにより製造装置の所定の位置に試料を搬送する。異なる装置間において試料の搬送が自動で行われるため、各装置における試料の搬送位置は厳密に定められている。
【0006】
半導体メーカにおいては、試料の処理枚数を増やすため、製造装置のスループットに加え、メンテナンスによる装置の稼動停止時間の短縮も求められる。
【0007】
半導体の製造環境であるクリーンルーム内においては、省スペース化が図られ、露光装置、コータ・デベロッパ及び搬送装置は互いに接近して設置されるため、露光装置などの移動困難な装置においては、メンテナンス時に搬送装置を移動させることによりメンテナンススペースを確保する。そのため、メンテナンス後に搬送装置を再設置する際は、搬送装置の位置調整や搬送ロボットに対する搬送位置のティーチングが必要となっている。
【0008】
搬送装置のティーチングに関連する公知技術の例としては、下記の特許文献がある。
【0009】
特許文献1には、基板搬送ロボットのティーチング作業にロードポート装置のマッピングの基準位置をティーチングしてティーチングポイントとし、ティーチングポイントを基準として基板の取り出しの可否を判定することにより、ロードポート装置と基板搬送ロボットの原点位置のマッチング及びロードポート装置と基板搬送ロボットの位置データを共有し、ティーチングポイントを補正することを特徴とする基板の搬送方法が開示されている。
【0010】
特許文献2には、保持部が保持する治具を径方向へ移動させた前後において、治具の撮像手段で目標位置に設けられたマークを撮像し、撮像画像上のマークの変位に基づいて、径方向への移動に伴う治具の移動量を検出し、検出される移動量が所定値以下となるようにロボット部の位置を修正することを特徴とするウエハ搬送装置が開示されている。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2008−147583号公報
【特許文献2】特開2009−184069号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
前述のように、試料の処理枚数を増やすためには、メンテナンス時における露光装置及びコータ・デベロッパの稼動停止時間を短縮し、早急に装置を稼動させる必要がある。
【0013】
しかし、従来のように、キャスタによって搬送装置の移動及び位置調整を行い、アジャスタボルト等で水平調整を行う方法では、調整作業の時間や場合によってはキャスタの取り付け及び取り外しの作業に時間を要する上、移動前の設置位置との誤差が発生する。そのため、搬送装置及びコータ・デベロッパの内部に搭載された試料搬送ロボットに対して、搬送位置の再ティーチングが必要となり、メンテナンスに時間がかかる要因となっている。
【0014】
本発明は、メンテナンスの際に搬送装置を容易に移動することを可能とし、かつ、再設置時に位置の再現性が得られるようにし、搬送ロボットのティーチングが不要とし、露光装置及びコータ・デベロッパの稼動停止時間の短縮を実現することを目的とする。
【課題を解決するための手段】
【0015】
本発明の搬送装置用位置決め機構は、装置固定台と、前記装置固定台の下面に固定された位置決め用突起部と、前記位置決め用突起部に対応する位置決め用突起受け部と、前記装置固定台を鉛直方向に移動させるための昇降機構と、前記装置固定台を水平移動させるための水平移動機構と、前記昇降機構を操作するための操作部とを含むことを特徴とする。
【発明の効果】
【0016】
本発明によれば、メンテナンスの際に搬送装置を容易に移動することができる。
【0017】
また、本発明によれば、搬送ロボットのティーチングを行う時間が不要となり、露光装置及びコータ・デベロッパの稼動停止時間を短縮することができる。
【図面の簡単な説明】
【0018】
【図1】実施例の搬送装置の全体構成を示す斜視図である。
【図2】図1の搬送装置の反対側を示す斜視図である。
【図3】実施例の搬送装置の配置を示す上面図である。
【図4】メンテナンスの際の搬送装置の位置を示す上面図である。
【図5】実施例の搬送装置の位置決め機構部を示す部分側面図である。
【図6】他の実施例の搬送装置の位置決め機構部を示す部分側面図である。
【図7】図5の搬送装置の上昇操作を示す部分側面図である。
【図8】図5の搬送装置の上昇操作後の位置を示す部分側面図である。
【図9】図5の搬送装置の水平移動操作を示す部分側面図である。
【発明を実施するための形態】
【0019】
以下、本発明の一実施形態に係る搬送装置用位置決め機構及びこれを用いた搬送装置について説明する。
【0020】
前記搬送装置用位置決め機構は、装置固定台と、装置固定台の下面に固定された位置決め用突起部と、位置決め用突起部に対応する位置決め用突起受け部と、装置固定台を鉛直方向に移動させるための昇降機構と、装置固定台を水平移動させるための水平移動機構と、昇降機構を操作するための操作部とを含む。
【0021】
前記搬送装置用位置決め機構において、昇降機構は、装置固定台に支点を有し支点の周りに回転可能な可動アームと、送りねじと、送りねじの回転に伴って送りねじの回転軸方向に移動するナットと、送りねじを回転させる操作部とを含み、水平移動機構は、可動アームに車軸を設けた車輪を含み、車軸は、ナットに設置されている。
【0022】
前記搬送装置用位置決め機構において、車輪は、送りねじの回転に伴って鉛直方向に移動可能であり、車輪が着地した状態で水平方向に移動可能となる。
【0023】
前記搬送装置用位置決め機構において、位置決め用突起部及び位置決め用突起受け部の数は、少なくとも3対であり、このうちの2対は、装置固定台の水平方向の位置決めを可能とするものである。
【0024】
前記搬送装置用位置決め機構において、前記2対以外の位置決め用突起部及び位置決め用突起受け部のうち少なくとも1対は、前記2対とともに装置固定台の鉛直方向の位置決めを可能とする。
【0025】
前記搬送装置用位置決め機構において、位置決め用突起受け部は、円錐台状又は円錐状である。
【0026】
前記搬送装置用位置決め機構において、位置決め用突起部は、先端が球面状である。
【0027】
前記搬送装置用位置決め機構は、装置固定台を鉛直下方に移動させた状態で固定され、装置固定台を鉛直上方に移動させた状態で水平方向に移動可能となる。
【0028】
前記搬送装置用位置決め機構においては、送りねじの回転を一方向に進めることにより車輪を下方に移動させて着地させ、送りねじの回転を当該一方向に更に進めることにより可動アームを支点の周りに回転させて装置固定台を鉛直上方に移動させる。
【0029】
前記搬送装置用位置決め機構において、車輪は、3個又は4個設置されている。
【0030】
前記搬送装置は、前記搬送装置用位置決め機構を備え、装置固定台が底部を構成する。
【0031】
以下、実施例を説明するが、本発明は、これらの実施例に限定されるものではない。また、本発明は、ウェーハ搬送装置(単に搬送装置とも呼ぶ。)以外にも高精度の位置決め再現性を要する装置に適用可能である。
【実施例】
【0032】
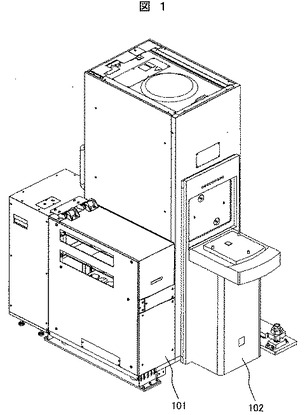
図1は、実施例の搬送装置の全体構成を示す斜視図である。また、図2は、図1の搬送装置の反対側を示す斜視図である。
【0033】
図1において、搬送装置は、ミニエン本体101及びFOUPオープナ102を含む構成を有する。
【0034】
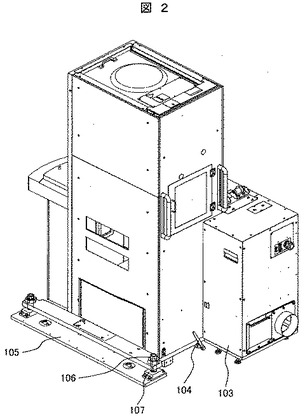
図2に示すように、搬送装置は、制御部103を有している。
【0035】
また、搬送装置を固定する床面には、位置決めベース105が設置してあり、位置決めベース105の上面に位置決めピン受け部107及び位置決めピン106が設置してある。これらは床面に固定されている。
【0036】
搬送装置の底部には、ハンドル104(ラチェットレンチ)が設置されている。
【0037】
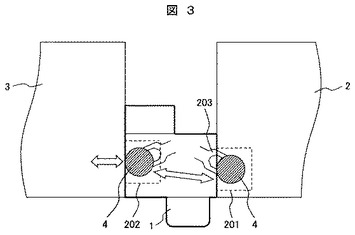
図3は、実施例の搬送装置の配置を示す上面図である。
【0038】
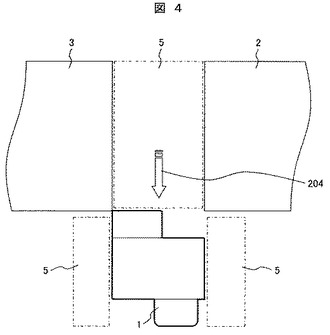
本図において、搬送装置1は、半導体製造工程において使用されている状態を示したものである。搬送装置1は、露光装置2とコータ・デベロッパ3との間に配置され、露光装置2とコータ・デベロッパ3との間において試料4(ウェーハ等)の搬送を行う。
【0039】
搬送装置1は、露光装置2の内部に設けられた試料受渡し部201及び搬送装置1の内部に設けられたコータ・デベロッパ3の試料受渡し部202にハンド203を用いて試料4を搬送する。
【0040】
図4は、メンテナンスの際に搬送装置を移動させた状態の配置を示したものである。
【0041】
本図において、搬送装置1は、図3に示す位置から矢印204の方向に移動させてある。これにより、メンテナンススペース5を確保する。
【0042】
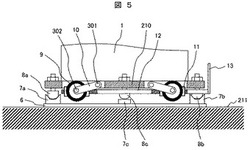
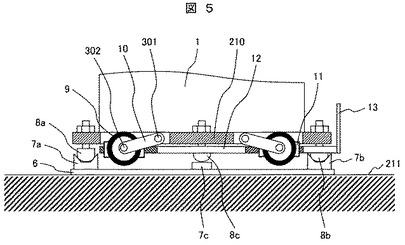
図5は、実施例の搬送装置の位置決め機構部を示す部分側面図である。
【0043】
本図において、搬送装置1の位置決め機構部は、搬送装置1の底部を構成する装置固定台210に設けられており、位置決めベース6、位置決めピン受け部7a、7b、7c(位置決め台座又は位置決め用突起受け部)、位置決めピン8a、8b、8c(位置決め用突起部)、ローラ9(車輪)、アーム10(可動アーム)、ナット11、送りねじ12及びハンドル13(操作部)を含む。
【0044】
搬送装置1を半導体製造ラインの定められた位置に設置するため、搬送装置1の設置位置の床211に位置決めベース6がアンカーを用いて固定されている。位置決めベース6には、3個の位置決めピン受け部7a、7b、7cが固定されている。
【0045】
また、位置決めピン8a、8bは、先端が球面状であり、位置決めピン受け部7a、7bは、円錐台状又は円錐状の凹部を有する形状となっている。
【0046】
半導体製造工程において使用されている状態においては、搬送装置1に固定された位置決めピン8a、8b、8cが位置決めピン受け部7a、7b、7cに載ることで搬送装置1が支えられ、同時に位置決めがされている。
【0047】
位置決めピン8a、8b、8cは、初回設置時に搬送装置1が所定の高さや水平度を満足するように位置決めピン8a、8b、8cの飛び出し量を調整してから固定する。これにより、次回からは、設置時における搬送装置1の高さの調整及び水平位置の調整が不要となる。
【0048】
ローラ9は、アーム10を介して装置固定台210に設置してあり、軸302(車軸)の周りに回転可能である。アーム10は、軸301(支点)によって装置固定台210に設置してあり、軸301の周りに回転可能である。
【0049】
軸302は、ナット11に連結してある。そして、ナット11は、送りねじ12と接続されており、送りねじ12の回転に伴って水平方向に移動するようになっている。ハンドル13は、昇降機構を操作するための部材であり、送りねじ12の端部に着脱可能となっている。本図においては、ハンドル13を取り付けた状態を示している。これらが昇降機構および水平移動機構である。
【0050】
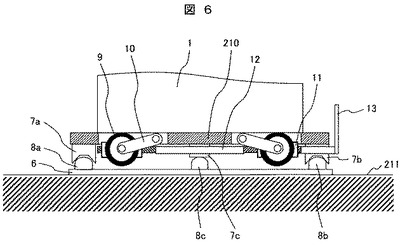
図6は、他の実施例の搬送装置の位置決め機構部を示す部分側面図である。
【0051】
本図においては、搬送装置1に位置決めピン受け部7a、7b、7cを取り付け、位置決めベース6に位置決めピン8a、8b、8cを取り付けてある。このような構成としても図5と同様の操作が可能である。
【0052】
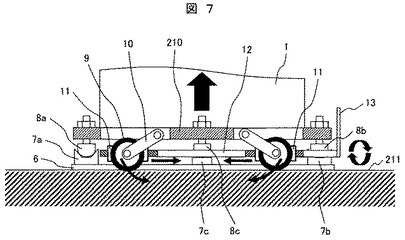
図7〜9は、図5の搬送装置の操作手順を示したものである。
【0053】
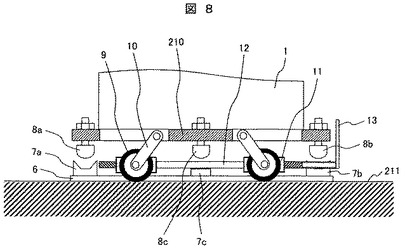
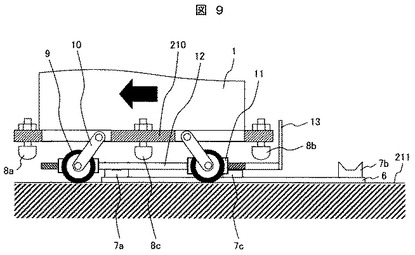
図7は、搬送装置の上昇操作を示す部分側面図である。図8は、搬送装置の上昇操作後の位置を示す部分側面図である。図9は、搬送装置の水平移動操作を示す部分側面図である。
【0054】
図7に示す送りねじ12において、左右のナット11に対応する部分はそれぞれ、右ねじ及び左ねじとしてある。このため、ハンドル13を手動で回して送りねじ12を回転させると、左右のナット11はそれぞれ反対方向に移動する。ナット11の移動に伴い、アーム10及びローラ9がアーム10の回転軸(軸301、302)を中心に回転する。
【0055】
ローラ9が床に着地した後も更にハンドル13を回転させると、搬送装置1は、ローラ9によって支えられ上昇する。搬送装置1の質量に応じて、送りねじ12のねじ形状(台形ねじ、ボールねじなど)や呼び径を選択することにより、ハンドル13は手動で得られる力で操作することが可能である。このため、本機構を動作させるにあたって電力や流体などのユーティリティーを必要とせず、容易に操作が可能である。
【0056】
図8に示すように、位置決めピン8a、8b、8cが位置決めピン受け部7a、7b、7cから開放されるまで上昇させると、位置決めピン8a、8b、8cを位置決めピン受け部7a、7b、7cに接触させることなく、着地したローラ9を用いて搬送装置1を水平方向に移動することができるようになる。図9は、搬送装置1を水平方向に移動した状態を示したものである。
【0057】
搬送装置1を再設置する際は、位置決めピン8a、8b、8cと位置決めピン受け部7a、7b、7cとが概ね一致する位置まで搬送装置1を移動し、ハンドル13を上昇時と反対側に回転することにより搬送装置1を下降させる。搬送装置1が徐々に下降し、位置決めピン8a、8b、8cと位置決めピン受け部7a、7b、7cが接触すると、搬送装置1は再び位置決めピン8によって支えられる。
【0058】
位置決めピン8a、8bは、先端が球面状であり、位置決めピン受け部7a、7bは、円錐台状又は円錐状の溝(凹部)を持った形状となっている。これがガイドとなって、搬送装置1の自重により位置決めピン8a、8bと位置決めピン受け部7a、7bの中心とが一致する位置に収まる。これにより、移動前の設置位置を再現することができる。
【符号の説明】
【0059】
1:搬送装置、2:露光装置、3:コータ・デベロッパ、4:試料、5:メンテナンススペース、6:位置決めベース、7a、7b、7c:位置決めピン受け部、8a、8b、8c:位置決めピン、9:ローラ、10:アーム、11:ナット、12:送りねじ、13:ハンドル。
【技術分野】
【0001】
本発明は、半導体ウェーハの搬送装置に関する。
【背景技術】
【0002】
半導体ウェーハの製造工程においては、各種の製造装置の間で試料搬送が自動で行われる。
【0003】
試料は、FOUP(Front Opening Unified Pod)内に収納され、OHV(Overhead Hoist Vehicle)やAGV(Automatic Guided Vehicle)によって装置の間を搬送される。
【0004】
製造装置は、試料の処理及び検査を行う装置本体と、FOUPから試料を取り出し、本体側の所定の位置へ試料の搬送を行う搬送装置とに分けられる。また、露光装置などの大規模な装置においては、上位装置コータ・デベロッパから、直接、試料を露光装置へ搬送する搬送装置が設置されている。
【0005】
一般に、搬送装置は、クリーンな環境を備えたチャンバ内に試料を搬送するロボットが搭載され、このロボットにより製造装置の所定の位置に試料を搬送する。異なる装置間において試料の搬送が自動で行われるため、各装置における試料の搬送位置は厳密に定められている。
【0006】
半導体メーカにおいては、試料の処理枚数を増やすため、製造装置のスループットに加え、メンテナンスによる装置の稼動停止時間の短縮も求められる。
【0007】
半導体の製造環境であるクリーンルーム内においては、省スペース化が図られ、露光装置、コータ・デベロッパ及び搬送装置は互いに接近して設置されるため、露光装置などの移動困難な装置においては、メンテナンス時に搬送装置を移動させることによりメンテナンススペースを確保する。そのため、メンテナンス後に搬送装置を再設置する際は、搬送装置の位置調整や搬送ロボットに対する搬送位置のティーチングが必要となっている。
【0008】
搬送装置のティーチングに関連する公知技術の例としては、下記の特許文献がある。
【0009】
特許文献1には、基板搬送ロボットのティーチング作業にロードポート装置のマッピングの基準位置をティーチングしてティーチングポイントとし、ティーチングポイントを基準として基板の取り出しの可否を判定することにより、ロードポート装置と基板搬送ロボットの原点位置のマッチング及びロードポート装置と基板搬送ロボットの位置データを共有し、ティーチングポイントを補正することを特徴とする基板の搬送方法が開示されている。
【0010】
特許文献2には、保持部が保持する治具を径方向へ移動させた前後において、治具の撮像手段で目標位置に設けられたマークを撮像し、撮像画像上のマークの変位に基づいて、径方向への移動に伴う治具の移動量を検出し、検出される移動量が所定値以下となるようにロボット部の位置を修正することを特徴とするウエハ搬送装置が開示されている。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2008−147583号公報
【特許文献2】特開2009−184069号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
前述のように、試料の処理枚数を増やすためには、メンテナンス時における露光装置及びコータ・デベロッパの稼動停止時間を短縮し、早急に装置を稼動させる必要がある。
【0013】
しかし、従来のように、キャスタによって搬送装置の移動及び位置調整を行い、アジャスタボルト等で水平調整を行う方法では、調整作業の時間や場合によってはキャスタの取り付け及び取り外しの作業に時間を要する上、移動前の設置位置との誤差が発生する。そのため、搬送装置及びコータ・デベロッパの内部に搭載された試料搬送ロボットに対して、搬送位置の再ティーチングが必要となり、メンテナンスに時間がかかる要因となっている。
【0014】
本発明は、メンテナンスの際に搬送装置を容易に移動することを可能とし、かつ、再設置時に位置の再現性が得られるようにし、搬送ロボットのティーチングが不要とし、露光装置及びコータ・デベロッパの稼動停止時間の短縮を実現することを目的とする。
【課題を解決するための手段】
【0015】
本発明の搬送装置用位置決め機構は、装置固定台と、前記装置固定台の下面に固定された位置決め用突起部と、前記位置決め用突起部に対応する位置決め用突起受け部と、前記装置固定台を鉛直方向に移動させるための昇降機構と、前記装置固定台を水平移動させるための水平移動機構と、前記昇降機構を操作するための操作部とを含むことを特徴とする。
【発明の効果】
【0016】
本発明によれば、メンテナンスの際に搬送装置を容易に移動することができる。
【0017】
また、本発明によれば、搬送ロボットのティーチングを行う時間が不要となり、露光装置及びコータ・デベロッパの稼動停止時間を短縮することができる。
【図面の簡単な説明】
【0018】
【図1】実施例の搬送装置の全体構成を示す斜視図である。
【図2】図1の搬送装置の反対側を示す斜視図である。
【図3】実施例の搬送装置の配置を示す上面図である。
【図4】メンテナンスの際の搬送装置の位置を示す上面図である。
【図5】実施例の搬送装置の位置決め機構部を示す部分側面図である。
【図6】他の実施例の搬送装置の位置決め機構部を示す部分側面図である。
【図7】図5の搬送装置の上昇操作を示す部分側面図である。
【図8】図5の搬送装置の上昇操作後の位置を示す部分側面図である。
【図9】図5の搬送装置の水平移動操作を示す部分側面図である。
【発明を実施するための形態】
【0019】
以下、本発明の一実施形態に係る搬送装置用位置決め機構及びこれを用いた搬送装置について説明する。
【0020】
前記搬送装置用位置決め機構は、装置固定台と、装置固定台の下面に固定された位置決め用突起部と、位置決め用突起部に対応する位置決め用突起受け部と、装置固定台を鉛直方向に移動させるための昇降機構と、装置固定台を水平移動させるための水平移動機構と、昇降機構を操作するための操作部とを含む。
【0021】
前記搬送装置用位置決め機構において、昇降機構は、装置固定台に支点を有し支点の周りに回転可能な可動アームと、送りねじと、送りねじの回転に伴って送りねじの回転軸方向に移動するナットと、送りねじを回転させる操作部とを含み、水平移動機構は、可動アームに車軸を設けた車輪を含み、車軸は、ナットに設置されている。
【0022】
前記搬送装置用位置決め機構において、車輪は、送りねじの回転に伴って鉛直方向に移動可能であり、車輪が着地した状態で水平方向に移動可能となる。
【0023】
前記搬送装置用位置決め機構において、位置決め用突起部及び位置決め用突起受け部の数は、少なくとも3対であり、このうちの2対は、装置固定台の水平方向の位置決めを可能とするものである。
【0024】
前記搬送装置用位置決め機構において、前記2対以外の位置決め用突起部及び位置決め用突起受け部のうち少なくとも1対は、前記2対とともに装置固定台の鉛直方向の位置決めを可能とする。
【0025】
前記搬送装置用位置決め機構において、位置決め用突起受け部は、円錐台状又は円錐状である。
【0026】
前記搬送装置用位置決め機構において、位置決め用突起部は、先端が球面状である。
【0027】
前記搬送装置用位置決め機構は、装置固定台を鉛直下方に移動させた状態で固定され、装置固定台を鉛直上方に移動させた状態で水平方向に移動可能となる。
【0028】
前記搬送装置用位置決め機構においては、送りねじの回転を一方向に進めることにより車輪を下方に移動させて着地させ、送りねじの回転を当該一方向に更に進めることにより可動アームを支点の周りに回転させて装置固定台を鉛直上方に移動させる。
【0029】
前記搬送装置用位置決め機構において、車輪は、3個又は4個設置されている。
【0030】
前記搬送装置は、前記搬送装置用位置決め機構を備え、装置固定台が底部を構成する。
【0031】
以下、実施例を説明するが、本発明は、これらの実施例に限定されるものではない。また、本発明は、ウェーハ搬送装置(単に搬送装置とも呼ぶ。)以外にも高精度の位置決め再現性を要する装置に適用可能である。
【実施例】
【0032】
図1は、実施例の搬送装置の全体構成を示す斜視図である。また、図2は、図1の搬送装置の反対側を示す斜視図である。
【0033】
図1において、搬送装置は、ミニエン本体101及びFOUPオープナ102を含む構成を有する。
【0034】
図2に示すように、搬送装置は、制御部103を有している。
【0035】
また、搬送装置を固定する床面には、位置決めベース105が設置してあり、位置決めベース105の上面に位置決めピン受け部107及び位置決めピン106が設置してある。これらは床面に固定されている。
【0036】
搬送装置の底部には、ハンドル104(ラチェットレンチ)が設置されている。
【0037】
図3は、実施例の搬送装置の配置を示す上面図である。
【0038】
本図において、搬送装置1は、半導体製造工程において使用されている状態を示したものである。搬送装置1は、露光装置2とコータ・デベロッパ3との間に配置され、露光装置2とコータ・デベロッパ3との間において試料4(ウェーハ等)の搬送を行う。
【0039】
搬送装置1は、露光装置2の内部に設けられた試料受渡し部201及び搬送装置1の内部に設けられたコータ・デベロッパ3の試料受渡し部202にハンド203を用いて試料4を搬送する。
【0040】
図4は、メンテナンスの際に搬送装置を移動させた状態の配置を示したものである。
【0041】
本図において、搬送装置1は、図3に示す位置から矢印204の方向に移動させてある。これにより、メンテナンススペース5を確保する。
【0042】
図5は、実施例の搬送装置の位置決め機構部を示す部分側面図である。
【0043】
本図において、搬送装置1の位置決め機構部は、搬送装置1の底部を構成する装置固定台210に設けられており、位置決めベース6、位置決めピン受け部7a、7b、7c(位置決め台座又は位置決め用突起受け部)、位置決めピン8a、8b、8c(位置決め用突起部)、ローラ9(車輪)、アーム10(可動アーム)、ナット11、送りねじ12及びハンドル13(操作部)を含む。
【0044】
搬送装置1を半導体製造ラインの定められた位置に設置するため、搬送装置1の設置位置の床211に位置決めベース6がアンカーを用いて固定されている。位置決めベース6には、3個の位置決めピン受け部7a、7b、7cが固定されている。
【0045】
また、位置決めピン8a、8bは、先端が球面状であり、位置決めピン受け部7a、7bは、円錐台状又は円錐状の凹部を有する形状となっている。
【0046】
半導体製造工程において使用されている状態においては、搬送装置1に固定された位置決めピン8a、8b、8cが位置決めピン受け部7a、7b、7cに載ることで搬送装置1が支えられ、同時に位置決めがされている。
【0047】
位置決めピン8a、8b、8cは、初回設置時に搬送装置1が所定の高さや水平度を満足するように位置決めピン8a、8b、8cの飛び出し量を調整してから固定する。これにより、次回からは、設置時における搬送装置1の高さの調整及び水平位置の調整が不要となる。
【0048】
ローラ9は、アーム10を介して装置固定台210に設置してあり、軸302(車軸)の周りに回転可能である。アーム10は、軸301(支点)によって装置固定台210に設置してあり、軸301の周りに回転可能である。
【0049】
軸302は、ナット11に連結してある。そして、ナット11は、送りねじ12と接続されており、送りねじ12の回転に伴って水平方向に移動するようになっている。ハンドル13は、昇降機構を操作するための部材であり、送りねじ12の端部に着脱可能となっている。本図においては、ハンドル13を取り付けた状態を示している。これらが昇降機構および水平移動機構である。
【0050】
図6は、他の実施例の搬送装置の位置決め機構部を示す部分側面図である。
【0051】
本図においては、搬送装置1に位置決めピン受け部7a、7b、7cを取り付け、位置決めベース6に位置決めピン8a、8b、8cを取り付けてある。このような構成としても図5と同様の操作が可能である。
【0052】
図7〜9は、図5の搬送装置の操作手順を示したものである。
【0053】
図7は、搬送装置の上昇操作を示す部分側面図である。図8は、搬送装置の上昇操作後の位置を示す部分側面図である。図9は、搬送装置の水平移動操作を示す部分側面図である。
【0054】
図7に示す送りねじ12において、左右のナット11に対応する部分はそれぞれ、右ねじ及び左ねじとしてある。このため、ハンドル13を手動で回して送りねじ12を回転させると、左右のナット11はそれぞれ反対方向に移動する。ナット11の移動に伴い、アーム10及びローラ9がアーム10の回転軸(軸301、302)を中心に回転する。
【0055】
ローラ9が床に着地した後も更にハンドル13を回転させると、搬送装置1は、ローラ9によって支えられ上昇する。搬送装置1の質量に応じて、送りねじ12のねじ形状(台形ねじ、ボールねじなど)や呼び径を選択することにより、ハンドル13は手動で得られる力で操作することが可能である。このため、本機構を動作させるにあたって電力や流体などのユーティリティーを必要とせず、容易に操作が可能である。
【0056】
図8に示すように、位置決めピン8a、8b、8cが位置決めピン受け部7a、7b、7cから開放されるまで上昇させると、位置決めピン8a、8b、8cを位置決めピン受け部7a、7b、7cに接触させることなく、着地したローラ9を用いて搬送装置1を水平方向に移動することができるようになる。図9は、搬送装置1を水平方向に移動した状態を示したものである。
【0057】
搬送装置1を再設置する際は、位置決めピン8a、8b、8cと位置決めピン受け部7a、7b、7cとが概ね一致する位置まで搬送装置1を移動し、ハンドル13を上昇時と反対側に回転することにより搬送装置1を下降させる。搬送装置1が徐々に下降し、位置決めピン8a、8b、8cと位置決めピン受け部7a、7b、7cが接触すると、搬送装置1は再び位置決めピン8によって支えられる。
【0058】
位置決めピン8a、8bは、先端が球面状であり、位置決めピン受け部7a、7bは、円錐台状又は円錐状の溝(凹部)を持った形状となっている。これがガイドとなって、搬送装置1の自重により位置決めピン8a、8bと位置決めピン受け部7a、7bの中心とが一致する位置に収まる。これにより、移動前の設置位置を再現することができる。
【符号の説明】
【0059】
1:搬送装置、2:露光装置、3:コータ・デベロッパ、4:試料、5:メンテナンススペース、6:位置決めベース、7a、7b、7c:位置決めピン受け部、8a、8b、8c:位置決めピン、9:ローラ、10:アーム、11:ナット、12:送りねじ、13:ハンドル。
【特許請求の範囲】
【請求項1】
装置固定台と、前記装置固定台の下面に固定された位置決め用突起部と、前記位置決め用突起部に対応する位置決め用突起受け部と、前記装置固定台を鉛直方向に移動させるための昇降機構と、前記装置固定台を水平移動させるための水平移動機構と、前記昇降機構を操作するための操作部とを含むことを特徴とする搬送装置用位置決め機構。
【請求項2】
前記昇降機構は、前記装置固定台に支点を有し前記支点の周りに回転可能な可動アームと、送りねじと、前記送りねじの回転に伴って前記送りねじの回転軸方向に移動するナットと、前記送りねじを回転させる操作部とを含み、前記水平移動機構は、前記可動アームに車軸を設けた車輪を含み、前記車軸は、前記ナットに設置されていることを特徴とする請求項1記載の搬送装置用位置決め機構。
【請求項3】
前記車輪は、前記送りねじの回転に伴って鉛直方向に移動可能であり、前記車輪が着地した状態で水平方向に移動可能となることを特徴とする請求項2記載の搬送装置用位置決め機構。
【請求項4】
前記位置決め用突起部及び前記位置決め用突起受け部の数は、少なくとも3対であり、このうちの2対は、前記装置固定台の水平方向の位置決めを可能とするものであることを特徴とする請求項1〜3のいずれか一項に記載の搬送装置用位置決め機構。
【請求項5】
前記2対以外の前記位置決め用突起部及び前記位置決め用突起受け部のうち少なくとも1対は、前記2対とともに前記装置固定台の鉛直方向の位置決めを可能とすることを特徴とする請求項1〜4のいずれか一項に記載の搬送装置用位置決め機構。
【請求項6】
前記位置決め用突起受け部は、円錐台状又は円錐状であることを特徴とする請求項1〜5のいずれか一項に記載の搬送装置用位置決め機構。
【請求項7】
前記位置決め用突起部は、先端が球面状であることを特徴とする請求項1〜6のいずれか一項に記載の搬送装置用位置決め機構。
【請求項8】
前記装置固定台を鉛直下方に移動させた状態で固定され、前記装置固定台を鉛直上方に移動させた状態で水平方向に移動可能となることを特徴とする請求項1〜7のいずれか一項に記載の搬送装置用位置決め機構。
【請求項9】
前記送りねじの回転を一方向に進めることにより前記車輪を下方に移動させて着地させ、前記送りねじの回転を当該一方向に更に進めることにより前記可動アームを前記支点の周りに回転させて前記装置固定台を鉛直上方に移動させることを特徴とする請求項2〜8のいずれか一項に記載の搬送装置用位置決め機構。
【請求項10】
前記車輪は、3個又は4個設置されていることを特徴とする請求項2〜9のいずれか一項に記載の搬送装置用位置決め機構。
【請求項11】
請求項1〜10のいずれか一項に記載の搬送装置用位置決め機構を備え、前記装置固定台が底部を構成することを特徴とする搬送装置。
【請求項1】
装置固定台と、前記装置固定台の下面に固定された位置決め用突起部と、前記位置決め用突起部に対応する位置決め用突起受け部と、前記装置固定台を鉛直方向に移動させるための昇降機構と、前記装置固定台を水平移動させるための水平移動機構と、前記昇降機構を操作するための操作部とを含むことを特徴とする搬送装置用位置決め機構。
【請求項2】
前記昇降機構は、前記装置固定台に支点を有し前記支点の周りに回転可能な可動アームと、送りねじと、前記送りねじの回転に伴って前記送りねじの回転軸方向に移動するナットと、前記送りねじを回転させる操作部とを含み、前記水平移動機構は、前記可動アームに車軸を設けた車輪を含み、前記車軸は、前記ナットに設置されていることを特徴とする請求項1記載の搬送装置用位置決め機構。
【請求項3】
前記車輪は、前記送りねじの回転に伴って鉛直方向に移動可能であり、前記車輪が着地した状態で水平方向に移動可能となることを特徴とする請求項2記載の搬送装置用位置決め機構。
【請求項4】
前記位置決め用突起部及び前記位置決め用突起受け部の数は、少なくとも3対であり、このうちの2対は、前記装置固定台の水平方向の位置決めを可能とするものであることを特徴とする請求項1〜3のいずれか一項に記載の搬送装置用位置決め機構。
【請求項5】
前記2対以外の前記位置決め用突起部及び前記位置決め用突起受け部のうち少なくとも1対は、前記2対とともに前記装置固定台の鉛直方向の位置決めを可能とすることを特徴とする請求項1〜4のいずれか一項に記載の搬送装置用位置決め機構。
【請求項6】
前記位置決め用突起受け部は、円錐台状又は円錐状であることを特徴とする請求項1〜5のいずれか一項に記載の搬送装置用位置決め機構。
【請求項7】
前記位置決め用突起部は、先端が球面状であることを特徴とする請求項1〜6のいずれか一項に記載の搬送装置用位置決め機構。
【請求項8】
前記装置固定台を鉛直下方に移動させた状態で固定され、前記装置固定台を鉛直上方に移動させた状態で水平方向に移動可能となることを特徴とする請求項1〜7のいずれか一項に記載の搬送装置用位置決め機構。
【請求項9】
前記送りねじの回転を一方向に進めることにより前記車輪を下方に移動させて着地させ、前記送りねじの回転を当該一方向に更に進めることにより前記可動アームを前記支点の周りに回転させて前記装置固定台を鉛直上方に移動させることを特徴とする請求項2〜8のいずれか一項に記載の搬送装置用位置決め機構。
【請求項10】
前記車輪は、3個又は4個設置されていることを特徴とする請求項2〜9のいずれか一項に記載の搬送装置用位置決め機構。
【請求項11】
請求項1〜10のいずれか一項に記載の搬送装置用位置決め機構を備え、前記装置固定台が底部を構成することを特徴とする搬送装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−258730(P2011−258730A)
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願番号】特願2010−131557(P2010−131557)
【出願日】平成22年6月9日(2010.6.9)
【出願人】(000233549)株式会社日立ハイテクコントロールシステムズ (130)
【Fターム(参考)】
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願日】平成22年6月9日(2010.6.9)
【出願人】(000233549)株式会社日立ハイテクコントロールシステムズ (130)
【Fターム(参考)】
[ Back to top ]