
搬送装置を備えた収納ラック
本発明は、上下に離間された容器支持体(16)を有する複数のラック・ユニット(20,22)を備えた収納ラック(10)に関し、支持体は、容器(50〜53)の収納場所を構成するためにラック・ユニット(20,22)の両側の側壁(12)上に対で配置される。容器(50〜53)は、制御可能な搬送装置(60)によって収納場所に出し入れすることができる。搬送装置(60)は、少なくとも1の第1の搬送手段(70)と1つの第2の搬送手段(80)を有し、第1の搬送手段(70)は、垂直方向(Z)に移動することができ、第2の搬送手段(80)は、第1の搬送手段(70)上に支持され、第1の搬送手段(70)に対して第1の水平方向(X)に移動することができる。本発明は、更に、いくつかの容器(50〜53)を操作するための移動装置(90)に関し、この移動装置(90)は、第2の搬送手段(80)上に配列され、容器(50〜53)を在庫に入れ在庫から出すためのいくつかの移動ユニット(100,102,104,106)を有し、各移動ユニット(100,102,104,106)を1つの容器(50〜53)と関連付けることができ、各移動ユニット(100,102,104,106)を別々に制御し移動させることができる。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、上下に離間された容器支持体を備えた複数のラック・ユニットを有する収納ラックに関し、前記支持体は、ラック・ユニットの両側の壁に対で配置されて容器の収納位置を構成する。そのような容器を、制御可能な搬送装置によって収納場所に入れそこから取り出すことができる。搬送装置は、少なくとも1つの第1の搬送手段と、1つの第2の搬送手段を有し、第1の搬送手段は、垂直方向に移動することができ、第2搬送手段は、第1の搬送手段上に支持され、第1の搬送手段に対して第1の水平方向に移動することができる。
【0002】
この種の収納ラックは、特許文献1から既知である。この収納ラックは、変更されたスペース条件に容易に適応することができる。これは、詳細には、モジュール方式で構成された第1の搬送手段を後で拡張したり縮小したりすることができるので可能であり、これにより、ラック・ユニットを収納ラックに適応させることができる。これに対応して、水平方向に移動可能な第2の搬送手段は、収納品キャリアを2つの側壁の間の所望の収納スペースに入れたり、その収納品キャリアをこの収納スペースから取り出すように適応される。
【0003】
さらに、上昇キャリッジによって移動可能で、いくつかの容器を収納スペースに入れそこから取り出すことができる格納取り出し装置は、特許文献2から既知である。容器を移動させるために、ベルト、反作用バッテンおよびスライド部材の複雑な構造物が必要である。
【0004】
詳細には、そのようないわゆる小物部品収納庫の中では、種々の小物部品が次々と必要とされ、それらの部品がそれぞれ、収納ラック内の異なる位置にある異なる容器に格納されているという問題がしばしば起こる。従って、一般に、必要な部品の入った様々な容器を収納ラックの操作ハッチに提供するには、数多くの搬送操作が次から次と必要になる。さらに、収納ラック内の可動式搬送装置は、複雑な構造のものであることが多く、変更できない形で収納ラックに組み込まれる。そのような搬送装置は、ほとんどの場合、対応するタイプの収納ラックとしか使用できないように設計されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】ドイツ連邦共和国公開公報第10 2005 048 379号
【特許文献2】ドイツ連邦共和国特許公報第42 20 116号
【発明の概要】
【課題を解決するための手段】
【0006】
本発明は、容器を出し入れするアクセス時間を短縮する収納ラックを提供する問題に焦点を当てるが、スペース条件の変化に適応できる収納ラックも提供する。
【0007】
この問題の解決は、いくつかの容器を操作するための移動装置を特徴とし、この移動装置が、第2の搬送手段上に配置され、かつ容器を出し入れするためのいくつかの移動ユニットを含む本発明の請求項1により冒頭に述べられた特徴を有する収納ラックにある。また、各移動ユニットは、容器と関連付けられてもよく、各移動ユニットは、別々に制御され移動されてもよい。
【0008】
本発明による収納ラックは、いくつかの容器を操作するためのいくつかの移動ユニットを備える移動装置を構成し、それにより、いくつかの容器を好ましくは同時かつ/または隣接する収納スペース内に提供できるようにするという概念に基づく。好ましい実施形態では、いくつかの容器、詳細には4個の容器を同時に収納庫に収納し取り出すことができる。このようにして、容器に格納された小物部品を収集するアクセス時間が短縮される。
【0009】
本発明による収納ラックは、詳細には、いくつかの容器を出し入れすることによってよりアクセス時間を速くできるという事実によって、すなわち出し入れ時間の短縮のために優れる。詳細には、いくつかの容器を同時に出し入れすることができる。さらに、容器を補助キャリアなしに移動させることができ、様々な高さの容器も使用することができる。
【0010】
本発明の構成において、用語「容器」は、品物を支持し収納することができる収納品用のキャリアとして理解される。例えば、容器は、レセプタクルまたは収納品キャリアでよい。様々なタイプの容器を、例えば様々な寸法を有し詳細には様々な高さの収納ラックに入れることができる。
【0011】
本発明は、完全に自動化された小物部品収納庫として使用されることが好ましい。
【0012】
本発明による収納ラックの有利な実施形態は、独立クレームで請求される。
【0013】
1つの好ましい実施形態では、移動装置は、モジュール式に互いに脱着できるいくつかの移動ユニットで構成され、ラック・ユニットの数に応じて移動ユニットの数を変更することができる。
【0014】
更に他の利点は、追加または代替として、第1の搬送手段が、互いに接続されたいくつかの着脱可能な搬送手段モジュールで構成され、搬送手段モジュールの数は、ラック・ユニットの数により変更可能である。
【0015】
また、移動ユニットの数が、ラック・ユニットの数および/または搬送手段モジュールの数に応じて変更可能であると有利である。
【0016】
別の好ましい実施形態では、移動ユニットは、把持ユニットおよび/または引き出しユニットとして構成される。そのようにして、対応する把持または引き出し手段を1つまたは複数の駆動手段によって移動させることができる。例えば、1つの駆動機構が、これらの手段のいくつかを駆動することができ、その結果、在庫に入れるか取り出す容器を、収納位置から他の搬送手段までまたはその逆に並列に移動させることができる。
【0017】
有利な実施形態では、移動ユニットは、対象の容器を、第1の水平方向と実質的に直角な第2の水平方向に移動させることができるように構成され配列される。この第2の水平方向は、2列のラック間で搬送シャフトを横切る方向に対応することが好ましい。
【0018】
移動ユニットが容器を少なくともグループで同期的または連続的に出し入れするように移動ユニットが配列されると利点である。このようにして、例えば4つの移動ユニットを有する移動装置の場合、第1の段階で、隣接する収納位置に格納されたあるグループの2つの容器を、収納位置から第2の搬送手段上に同時に取り出すことができ、また対応する第2の段階で、収納ラック内の異なる高さにある別のグループの他の2つの容器を、隣接収納場所から第2の搬送手段上に同期的に移動させることができる。
【0019】
例えば、好ましくは同じ収納レベル上の隣接収納位置にある4つの容器を第2の搬送手段上にまたはその逆に同期的に移動させる把持ユニットとして構成された4つの移動ユニットを提供することは有利である。
【0020】
有利な実施形態では、収納ラックは、容器を提供し取り出すための少なくとも1つの操作ハッチを有する。しかし、いくつかのハッチが提供されてもよい。操作ハッチの近くに容器の高さを測定する高さ測定装置を備えると有利である。高さ測定装置は、容器を特定の収納ユニットに収納するのに必要な高さ単位数を確認することができる。これにより、高さ測定装置の測定信号を、搬送装置の制御ユニットに通信することができ、搬送装置は、収納ラックの占有状態と容器の高さにより、容器を適切な収納位置に搬送することができる。
【0021】
さらに、操作ハッチ内いくつかの容器がある場合、高さ測定装置は、最も高い容器の高さを確立することができる。これを行うために、いくつかの測定装置を使用することができる。次に、制御ユニットは、容器の数に対応する数の収納場所がある収納ラックの隣接領域と、そのうち容器のうちの最も高さが高いものを収容するのに十分な収納位置高さを有する少なくとも1つの場所を識別することができる。次に、操作ハッチに配置されたすべての容器を、1回の単純な移送運動で同時に識別された隣接収納位置に移動させることができる。
【0022】
他の実施形態では、操作ハッチの領域内の個別の各容器の高さを測定できるいくつかの高さ測定装置を提供することもできる。また、異なる高さのいくつかの容器を、個々の容器を入れるのに隣接収納場所の個々の高さが十分な収納場所を提供する収納ラックの領域まで移動させることができる。
【0023】
好ましい実施形態では、操作ハッチは、すべての容器を同時に収納庫から出し入れできるように寸法決めされる。ラック・ユニットを追加または除去することにより収納ラックを拡張または縮小しなければならない場合に、操作ハッチのサイズも適切に変更することができる。この変更は、移動ユニットの数および/または搬送手段モジュールの数に合わせて調整することができる。このようにして、収納ラック・ユニット、操作ハッチ、搬送装置、特に第1および/または第2の搬送手段のモジュール、および移動ユニットを互いに整合させることができるアセンブリのための収納ラック・キットを得ることができる。
【0024】
好ましい実施形態において操作ハッチの断続的な開閉を達成するために、操作ハッチ領域に、例えばシャッタ装置、詳細には高速扉を提供することができる。そのような装置は、操作ハッチから収納ラックにほこりが入るのを防ぐ。この種の高速扉は、例えば、動作後に、取り出された容器が操作ハッチ内に配置されたままになり、シャッタ装置は既に閉まってるにもかかわらず、オペレータが容器を更に操作できるように操作ハッチの内側端に位置決めされてもよい。
【0025】
容器支持体は、側壁上に格子状に配列されると有利である。特定の格子サイズの規定と、搬送装置の制御ユニット内のこの格子の位置決めによって、前述の高さ測定装置と協力して、容器の特定の高さに適した収納位置を割り当てることができる。容器支持体が側壁に曲折パターンで押し込まれると有利である。側壁は、鋼板で作成され、垂直スタンションに適切に溶接される。また、容器支持体は、容器の支持バーを着脱できる溝を有すると有利である。この種の支持バーは、容器の側壁、好ましくは底面に向けて取り付けることができる。詳細には25mmの格子を有すると有利であることが分かった。
【0026】
さらに他の好ましい実施形態では、第1の搬送手段、第2の搬送手段、および/または移動ユニットおよび移動装置が、ラック・アンド・ピニオン駆動機構および/またはチェーン駆動機構によって移動可能である。これらの駆動機構の正確な構成は、特許文献1を参照されたい。
【図面の簡単な説明】
【0027】
次に、本発明は、次のような図面を参照して説明される。
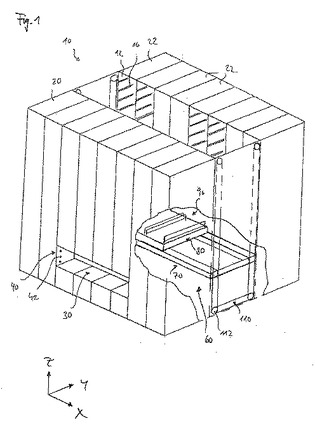
【図1】搬送装置を備えた本発明による収納ラックの斜視図である。
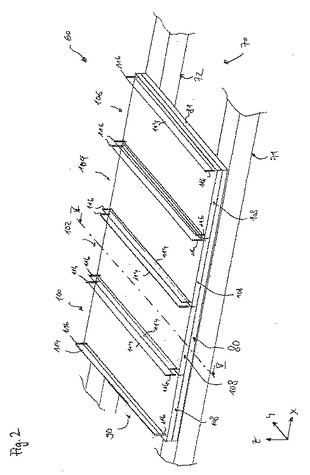
【図2】図1の一部分に対応する搬送装置の拡大斜視図である。
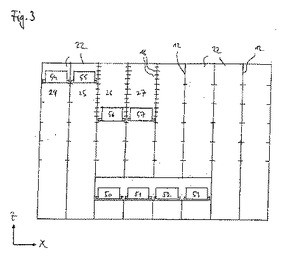
【図3】容器支持体と出し入れされる容器を概略的に表す収納ラックの図である。
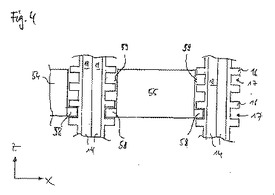
【図4】図3からの抽出部分の拡大図である。
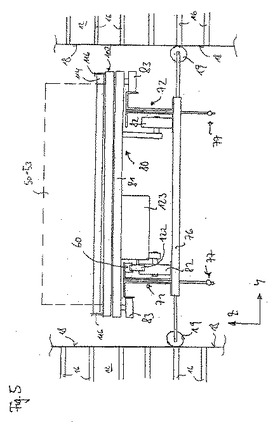
【図5】図2の線V−Vに沿った搬送装置の断面図である。
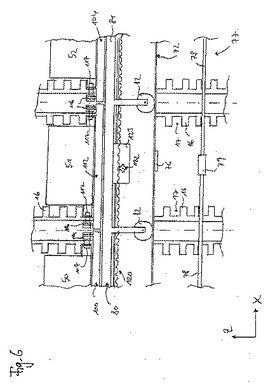
【図6】搬送装置の縦断面図である。
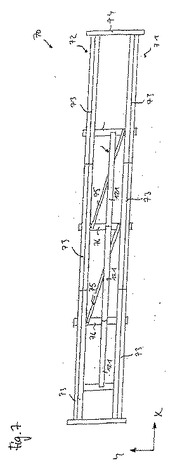
【図7】第1の搬送手段の上面図である。
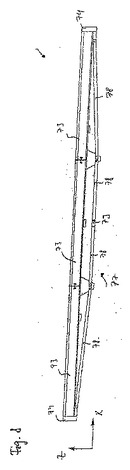
【図8】第1の搬送手段の側面図である。
【発明を実施するための形態】
【0028】
図1は、16ラック・ユニット20,22を有する小物部品収納庫の形の本発明による収納ラック10の概略的な構造を示し、ここでは、8ラック・ユニット20が、第1の列に隣り合って配列され、8ラック・ユニット22が、第2の列に隣り合って配列されている。これらの2つのラック・ユニット間の空間には、搬送シャフトに可動式に配列され、収納庫から容器を出し入れするための搬送装置60がある。この実施形態では、例えば、在庫に入れられる4つの容器50、51、52、53と、取り出される4つの容器54、55、56、57が、操作されている(図2を参照)。しかしながら、他の数の容器を操作することもできる。
【0029】
入る容器50〜53を適切な収納場所に収納しまたはそこから取り出すことができるように、ラック・ユニット20,22は、対になった容器支持体16が互いに反対側に配置され垂直方向に配置されたスタンション14を有する側壁12を有する(図3,図4を参照)。鋼板70からなる側壁は、それぞれスタンション14に溶接される。各容器の両側59には、2つの対応する容器支持体16で容器を支持する支持バー58がある。
【0030】
図4で分かるように、容器支持体16は、対応する側壁12に組み込まれ、曲折パターンで壁に押し込まれる。これにより、側壁12に比較的頑強な構造をもたせることができる。容器50〜53を収納スペース24〜27に導入し易くするために、容器支持体16は、搬送方向60に面した側にテーパ付き断面を有する。側壁12から突出する各組の2つの隣り合った容器支持体16の間には、容器の支持バー58を収容する溝17が形成される。
【0031】
図1は、また、容器50〜53を収納ラック10に装填したり容器54〜57を収納ラック10から取り出したりすることを可能にする操作ハッチ30を示す。収納スペースの最適な使用を達成するために、操作ハッチ30の領域内には、容器54〜57の高さを測定するための高さ測定装置40が提供される。高さ測定装置40は、容器50〜57を格納するのに必要な高さ単位数を確認することができるように、ラック内の容器支持体16の間の距離に対応する互いの距離でいくつかの光電子ビーム42を備える。制御ユニットは、個別の容器50〜57に必要な格納高さを確立し、好ましくは隣接した収納スペース24〜27の数を識別して、容器50〜53の数を適切な収納スペースに同時に送ることができるようにする。
【0032】
制御可能な搬送装置60は、容器50〜57を出し入れするために、容器50〜57を第1の空間方向Z、第2の空間方向Xおよび第3の空間方向Yに搬送できるように構成される。示した実施形態では、3つの空間方向X、Y、Zは互いに垂直である。以下に、空間方向Zは垂直方向として記述され、空間方向Xは長手方向として記述され、空間方向Yは横断方向として記述される(図1を参照)。
【0033】
容器50〜57の垂直方向、長手方向および横断方向の動きを容易にするために、搬送装置60は、第1の搬送手段70と第2の搬送手段80、ならびに移動装置90を含む(詳細には、図1、図2および図6を参照)。
【0034】
第1の搬送手段70は、駆動機構によって垂直方向Zに移動可能な上昇プラットフォームのように構成され、互いに平行に配列された2つのキャリア71,72を有する。図7と図8に示したように、各キャリア71,72は、ボルト締められた複数のキャリア・モジュール73から組み立てられる。これは、分解可能なキャリア・モジュール73の構造を提供する。
【0035】
第1の搬送手段70は、キャリア71,72の下側の下に延在する2つのプレテンション要素77を備える。各プレテンション要素77は、タイロッドの形の4つのプレテンション・モジュール78を有する。プレテンション要素77の中間部分には、プレテンション要素77によって生成された張力を調整するためのテンショナ79がある。追加または代替として、プレテンション要素77の端部モジュールの端部領域で張力の調整を行うこともできる。中間部分で、プレテンション要素77は、キャリア71,72から離れている。これにより、てこ作用のアームの結果として、搬送装置60と容器50〜57の重量によって生成されたトルクを打ち消すトルクを生成することができる。これにより、キャリア71,72の曲がりが小さくなり、キャリア71,72は、プレテンション要素77のないキャリアよりも大きい荷重を受けることができる。
【0036】
キャリア71,72の組み立ての際、個別のキャリア・モジュール73は互いにボルト締めされる。キャリア71,72の下側には、キャリア・モジュール73への接続箇所のそれぞれに、キャリア71,72から離れて固定されたプレテンション要素77の接続アームが取り付けられる。第1の搬送手段70は、また、斜めに配列された2つの補強要素75と、キャリア71,72の端に2つの横断キャリア74とを備える(図7、図8を参照)。
【0037】
図1から、第1の搬送手段70が、1つのチェーン110と駆動モータから水平方向に突出する2つの駆動シャフト112とをそれぞれ有する合計4つのチェーン駆動機構を有する駆動機構を装備していることが分かる(図示せず)。様々な長さの収納ラック10に適応できるように、様々な長さの駆動シャフト112が使用される。
【0038】
第1の搬送手段70が移動している間にキャリア71,72が横断方向Yに揺動するのを防ぐために、ラック・ユニット20,22の垂直スタンション上に支持された横断キャリア71,72上と支柱76上にいくつかのホイール19が提供される。
【0039】
特に図5と図6から分かるように、第2の搬送手段80は、シャーシ81と、いくつかのホイール82とを有する。これにより、第2の搬送手段80を、2つのラック・ユニット20,22間で長手方向Xに移動させることができる。この移動を達成するために、第1の搬送手段70上に支持されたホイール82を駆動するラック・アンド・ピニオン駆動機構が提供されてもよい。
【0040】
ラック・アンド・ピニオン駆動機構は、いくつかの棚受けモジュール121で構成された棚受け120、棚受け120と係合するピニオン122、およびピニオン122を駆動するためのモータ123を含む。棚受け120が、モジュール構造のものなので、様々な長さの第1の搬送手段70に適合するように適応させることもできる。棚受けモジュール121は、第1の搬送手段70の支柱76上に配置される。ピニオン122とモータ123は、ピニオン122の歯が、棚受け120の歯とすぐに係合できるようにシャーシ81上に配置される(図6を参照)。
【0041】
第2の搬送手段80の動きは、一方では、キャリア71,72のフランジに沿って移動するホイール82によってガイドされる。追加のホイール83は、キャリア71,72の垂直方向に向けられたフランジと係合し、キャリア71,72上のシャーシ81の側面をガイドする働きをする。
【0042】
この実施形態では、搬送装置60上に提供された移動装置90は、例えば、容器50〜57を操作するための4つの移動ユニット100,102、104および106を含む。次に、これらの4つの移動ユニット100〜106の支援で容器50〜53を在庫に入れる手順は、在庫される4つの容器50、51、52および53が操作ハッチ30の近くに配置された図3の状況に応じて説明される。
【0043】
容器50〜53が、操作ハッチ30内に配置された後で、高さ測定装置40が、すべての容器50〜53の高さを確立する。この場合、4つの容器はすべて同じ高さを有する。次に、制御ユニットは、ラック・ユニット20,22のうちの1つに、好ましくは4つの隣り合った利用可能なスペースがある領域を確認する。この場合、例えば、ラック・ユニット22内の収納スペース24、25、26および27が識別される(図3を参照)。
【0044】
移動装置90は、移動ユニット100〜106のそれぞれを容器50〜53のうちの1つと関連付けることができるように準備される。この場合、4つの移動ユニット100〜106はそれぞれ、第2の搬送手段80のシャーシ81上に支持されたキャリア板108を有する。これらのキャリア板108は、互いに離して取り付けられ、水平方向Xに別々に独立に移動させることができる。
【0045】
別の変形では、移動ユニット100〜106は、共通のキャリア板に取り付けられ、一緒に移動させることしかできない。一般に、長手方向Xまたは横断方向Yに互いに隣接して配置することができ、また長手方向Xおよび/または横断方向Yに個々にまたはグループとして移動させることができるいくつかのキャリア板108を提供することができる。また、例えば、2つの移動ユニットが1つのキャリア板108上に支持され、それらが一緒に移動することもできる。さらに、それぞれの移動ユニット100〜106を別々に制御し移動させることができる駆動機構が提供される。
【0046】
特に図2と図6で分かるように、各駆動機構は、1つのチェーン114と2つの駆動シャフト116をそれぞれ含む2つの駆動ユニットで構成される。各チェーン114上に、容器を把持することができる少なくとも1つのキャリッジ117がある。キャリッジ117は、容器の支持バー58の対応する溝と係合することが好ましい。
【0047】
換言すると、いずれの場合も、2つの駆動ユニットが、容器50〜53を1つずつ把持して、操作ハッチ30の作業面から対応する移動ユニット100〜106のキャリア板108上に容器を乗せる。次に、移動ユニット100〜106は、容器50〜53を横断方向Yに同時に移動させる。
【0048】
容器50〜53が、移動装置90によって操作ハッチ30から収集された後、搬送装置60は、容器50〜53を搬送シャフトに沿って長手方向Xと垂直方向Zにのみ移動させることができる。制御ユニットによって割り当てられた位置に達した後、移動ユニット100〜106は、容器50〜53を収納スペース24〜27に押し込む(図3を参照)。
【0049】
容器50〜53が、収納スペース24〜27に入れられた後、この動作のすぐ後に、容器54,55,56,57を取り出すことができる(図3を参照)。搬送装置60が容器54,55の高さまで移動した後で、移動装置90は、移動ユニット100および102を利用して、2つの容器54,55を同時に収納スペースから第2の搬送手段80上に引き出す。次に、第1の搬送手段70は、搬送装置60が容器56,57の高さに達するまで垂直方向Zに下降し、そこで、移動ユニット104および106を利用して、他の2つの容器56,57を収納スペースから第2の搬送手段80上に引き出す。
【0050】
次に、搬送装置60は、操作ハッチ30の高さまで移動し、そして第2の搬送手段80は、4つの容器54〜57をすべて同時に操作ハッチ30に押し込むことができるように長手方向Xに位置決めされる。
【0051】
容器54〜57の引き出しと押し込みは、移動ユニット100〜106の駆動ユニットを利用して、すなわち把持/引き出しユニットとしてのチェーン駆動機構によって、容器50〜53を在庫に入れるための前述のプロセスと同じように実行される。
【0052】
説明した実施形態の特徴は、詳細には、いくつかの容器50〜53または54〜57を在庫に入れそれらを在庫から取り出す際に達成されるより速いアクセス、すなわち収納と取り出しの時間が短いことにある。詳細には、容器を操作ハッチ30に同時に供給することができるか、容器を操作ハッチ30から在庫に同時に入れることができることが好ましい。さらに、移動装置90は、個別の移動ユニットを追加または除去することによってモジュール方式で構成されてもよく、そのようにして、収納ラック10の容量を柔軟に変更できるように適応されてもよい。収納ユニット20,22が追加または除去され、かつ第1の搬送手段70がキャリア・モジュール/搬送手段モジュール73によってモジュール式に適応された場合、これらに応じて、収納ラックの最適な動作を達成できるように移動ユニットの数を変更することができる。
【0053】
前述の一実施形態の例では、4つの移動ユニット100〜106がすべて、第2の搬送手段80上に支持され、従って、第1の搬送手段70上で長手方向Xに一緒に動かすことができる。しかしながら、原理として、あるグループの移動ユニット(例えば、2つの移動ユニット)を別のグループの移動ユニットと全く別に、第2の搬送手段80上に移動可能に配置することができる。
【0054】
いくつかの移動ユニット100〜106を有する移動装置90に関して前に述べた実施形態によって、あるグループのいくつかの容器50〜53(詳細には、4つの容器)を同時に収納スペースに出し入れすることができる。そのようにして、4つの容器50〜53をすべて、ある水平レベルの隣り合った収納ユニットに入れるか、またはまず最初にあるグループの例えば2つの容器を、同じレベルの隣り合うかまたは互いに離れた2つの収納スペースに入れ、第2のステップで、別のグループの2つの容器を別のレベルの隣り合うかまたは互いに離れた収納スペースに入れることができる。
【0055】
最後に、側壁12が、好ましくは格子状パターンで設計されるので、異なる高さの容器50〜57を使用することができ、また前述の高さ測定装置を用いて適切な収納スペースを決定することができる。さらに、容器50〜57は、追加の装填キャリアなしに搬送することができる。好ましい実施形態では、4つの容器50〜53または54〜57の同時の収納と取り出しが可能である。使用される容器50〜57は、従来の小物部品キャリアでもよく、また必要に応じて、異なる高さを有してもよく、また例えば、最大50kgの負荷を保持することができる。
【符号の説明】
【0056】
10 収納ラック
12 側壁
14 スタンション
16 容器支持体
17 溝
18 前面
19 ホイール
20 ラック・ユニット
22 ラック・ユニット
24 収納場所
25 収納場所
26 収納場所
27 収納場所
30 操作ハッチ
40 高さ測定装置
42 光電子ビーム
50 容器
51 容器
52 容器
53 容器
54 容器
55 容器
56 容器
57 容器
58 支持バー
59 (容器の)側面
60 搬送装置
70 第1の搬送手段
71 キャリア
72 キャリア
73 キャリア・モジュール
74 横断キャリア
75 補助要素
76 支柱
77 プレテンション要素
78 プレテンション・モジュール
79 テンショナ
80 第2の搬送手段
81 シャーシ
82 ホイール
83 ホイール
90 移動装置
100 移動ユニット
102 移動ユニット
104 移動ユニット
106 移動ユニット
108 キャリア板
110 チェーン
112 駆動シャフト
114 チェーン
116 駆動シャフト
117 キャリッジ
120 棚受け
121 棚受けモジュール
122 ピニオン
123 モータ
X 第1の水平方向/長手方向
Y 第2の水平方向/横断方向
Z 垂直方向
【技術分野】
【0001】
本発明は、上下に離間された容器支持体を備えた複数のラック・ユニットを有する収納ラックに関し、前記支持体は、ラック・ユニットの両側の壁に対で配置されて容器の収納位置を構成する。そのような容器を、制御可能な搬送装置によって収納場所に入れそこから取り出すことができる。搬送装置は、少なくとも1つの第1の搬送手段と、1つの第2の搬送手段を有し、第1の搬送手段は、垂直方向に移動することができ、第2搬送手段は、第1の搬送手段上に支持され、第1の搬送手段に対して第1の水平方向に移動することができる。
【0002】
この種の収納ラックは、特許文献1から既知である。この収納ラックは、変更されたスペース条件に容易に適応することができる。これは、詳細には、モジュール方式で構成された第1の搬送手段を後で拡張したり縮小したりすることができるので可能であり、これにより、ラック・ユニットを収納ラックに適応させることができる。これに対応して、水平方向に移動可能な第2の搬送手段は、収納品キャリアを2つの側壁の間の所望の収納スペースに入れたり、その収納品キャリアをこの収納スペースから取り出すように適応される。
【0003】
さらに、上昇キャリッジによって移動可能で、いくつかの容器を収納スペースに入れそこから取り出すことができる格納取り出し装置は、特許文献2から既知である。容器を移動させるために、ベルト、反作用バッテンおよびスライド部材の複雑な構造物が必要である。
【0004】
詳細には、そのようないわゆる小物部品収納庫の中では、種々の小物部品が次々と必要とされ、それらの部品がそれぞれ、収納ラック内の異なる位置にある異なる容器に格納されているという問題がしばしば起こる。従って、一般に、必要な部品の入った様々な容器を収納ラックの操作ハッチに提供するには、数多くの搬送操作が次から次と必要になる。さらに、収納ラック内の可動式搬送装置は、複雑な構造のものであることが多く、変更できない形で収納ラックに組み込まれる。そのような搬送装置は、ほとんどの場合、対応するタイプの収納ラックとしか使用できないように設計されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】ドイツ連邦共和国公開公報第10 2005 048 379号
【特許文献2】ドイツ連邦共和国特許公報第42 20 116号
【発明の概要】
【課題を解決するための手段】
【0006】
本発明は、容器を出し入れするアクセス時間を短縮する収納ラックを提供する問題に焦点を当てるが、スペース条件の変化に適応できる収納ラックも提供する。
【0007】
この問題の解決は、いくつかの容器を操作するための移動装置を特徴とし、この移動装置が、第2の搬送手段上に配置され、かつ容器を出し入れするためのいくつかの移動ユニットを含む本発明の請求項1により冒頭に述べられた特徴を有する収納ラックにある。また、各移動ユニットは、容器と関連付けられてもよく、各移動ユニットは、別々に制御され移動されてもよい。
【0008】
本発明による収納ラックは、いくつかの容器を操作するためのいくつかの移動ユニットを備える移動装置を構成し、それにより、いくつかの容器を好ましくは同時かつ/または隣接する収納スペース内に提供できるようにするという概念に基づく。好ましい実施形態では、いくつかの容器、詳細には4個の容器を同時に収納庫に収納し取り出すことができる。このようにして、容器に格納された小物部品を収集するアクセス時間が短縮される。
【0009】
本発明による収納ラックは、詳細には、いくつかの容器を出し入れすることによってよりアクセス時間を速くできるという事実によって、すなわち出し入れ時間の短縮のために優れる。詳細には、いくつかの容器を同時に出し入れすることができる。さらに、容器を補助キャリアなしに移動させることができ、様々な高さの容器も使用することができる。
【0010】
本発明の構成において、用語「容器」は、品物を支持し収納することができる収納品用のキャリアとして理解される。例えば、容器は、レセプタクルまたは収納品キャリアでよい。様々なタイプの容器を、例えば様々な寸法を有し詳細には様々な高さの収納ラックに入れることができる。
【0011】
本発明は、完全に自動化された小物部品収納庫として使用されることが好ましい。
【0012】
本発明による収納ラックの有利な実施形態は、独立クレームで請求される。
【0013】
1つの好ましい実施形態では、移動装置は、モジュール式に互いに脱着できるいくつかの移動ユニットで構成され、ラック・ユニットの数に応じて移動ユニットの数を変更することができる。
【0014】
更に他の利点は、追加または代替として、第1の搬送手段が、互いに接続されたいくつかの着脱可能な搬送手段モジュールで構成され、搬送手段モジュールの数は、ラック・ユニットの数により変更可能である。
【0015】
また、移動ユニットの数が、ラック・ユニットの数および/または搬送手段モジュールの数に応じて変更可能であると有利である。
【0016】
別の好ましい実施形態では、移動ユニットは、把持ユニットおよび/または引き出しユニットとして構成される。そのようにして、対応する把持または引き出し手段を1つまたは複数の駆動手段によって移動させることができる。例えば、1つの駆動機構が、これらの手段のいくつかを駆動することができ、その結果、在庫に入れるか取り出す容器を、収納位置から他の搬送手段までまたはその逆に並列に移動させることができる。
【0017】
有利な実施形態では、移動ユニットは、対象の容器を、第1の水平方向と実質的に直角な第2の水平方向に移動させることができるように構成され配列される。この第2の水平方向は、2列のラック間で搬送シャフトを横切る方向に対応することが好ましい。
【0018】
移動ユニットが容器を少なくともグループで同期的または連続的に出し入れするように移動ユニットが配列されると利点である。このようにして、例えば4つの移動ユニットを有する移動装置の場合、第1の段階で、隣接する収納位置に格納されたあるグループの2つの容器を、収納位置から第2の搬送手段上に同時に取り出すことができ、また対応する第2の段階で、収納ラック内の異なる高さにある別のグループの他の2つの容器を、隣接収納場所から第2の搬送手段上に同期的に移動させることができる。
【0019】
例えば、好ましくは同じ収納レベル上の隣接収納位置にある4つの容器を第2の搬送手段上にまたはその逆に同期的に移動させる把持ユニットとして構成された4つの移動ユニットを提供することは有利である。
【0020】
有利な実施形態では、収納ラックは、容器を提供し取り出すための少なくとも1つの操作ハッチを有する。しかし、いくつかのハッチが提供されてもよい。操作ハッチの近くに容器の高さを測定する高さ測定装置を備えると有利である。高さ測定装置は、容器を特定の収納ユニットに収納するのに必要な高さ単位数を確認することができる。これにより、高さ測定装置の測定信号を、搬送装置の制御ユニットに通信することができ、搬送装置は、収納ラックの占有状態と容器の高さにより、容器を適切な収納位置に搬送することができる。
【0021】
さらに、操作ハッチ内いくつかの容器がある場合、高さ測定装置は、最も高い容器の高さを確立することができる。これを行うために、いくつかの測定装置を使用することができる。次に、制御ユニットは、容器の数に対応する数の収納場所がある収納ラックの隣接領域と、そのうち容器のうちの最も高さが高いものを収容するのに十分な収納位置高さを有する少なくとも1つの場所を識別することができる。次に、操作ハッチに配置されたすべての容器を、1回の単純な移送運動で同時に識別された隣接収納位置に移動させることができる。
【0022】
他の実施形態では、操作ハッチの領域内の個別の各容器の高さを測定できるいくつかの高さ測定装置を提供することもできる。また、異なる高さのいくつかの容器を、個々の容器を入れるのに隣接収納場所の個々の高さが十分な収納場所を提供する収納ラックの領域まで移動させることができる。
【0023】
好ましい実施形態では、操作ハッチは、すべての容器を同時に収納庫から出し入れできるように寸法決めされる。ラック・ユニットを追加または除去することにより収納ラックを拡張または縮小しなければならない場合に、操作ハッチのサイズも適切に変更することができる。この変更は、移動ユニットの数および/または搬送手段モジュールの数に合わせて調整することができる。このようにして、収納ラック・ユニット、操作ハッチ、搬送装置、特に第1および/または第2の搬送手段のモジュール、および移動ユニットを互いに整合させることができるアセンブリのための収納ラック・キットを得ることができる。
【0024】
好ましい実施形態において操作ハッチの断続的な開閉を達成するために、操作ハッチ領域に、例えばシャッタ装置、詳細には高速扉を提供することができる。そのような装置は、操作ハッチから収納ラックにほこりが入るのを防ぐ。この種の高速扉は、例えば、動作後に、取り出された容器が操作ハッチ内に配置されたままになり、シャッタ装置は既に閉まってるにもかかわらず、オペレータが容器を更に操作できるように操作ハッチの内側端に位置決めされてもよい。
【0025】
容器支持体は、側壁上に格子状に配列されると有利である。特定の格子サイズの規定と、搬送装置の制御ユニット内のこの格子の位置決めによって、前述の高さ測定装置と協力して、容器の特定の高さに適した収納位置を割り当てることができる。容器支持体が側壁に曲折パターンで押し込まれると有利である。側壁は、鋼板で作成され、垂直スタンションに適切に溶接される。また、容器支持体は、容器の支持バーを着脱できる溝を有すると有利である。この種の支持バーは、容器の側壁、好ましくは底面に向けて取り付けることができる。詳細には25mmの格子を有すると有利であることが分かった。
【0026】
さらに他の好ましい実施形態では、第1の搬送手段、第2の搬送手段、および/または移動ユニットおよび移動装置が、ラック・アンド・ピニオン駆動機構および/またはチェーン駆動機構によって移動可能である。これらの駆動機構の正確な構成は、特許文献1を参照されたい。
【図面の簡単な説明】
【0027】
次に、本発明は、次のような図面を参照して説明される。
【図1】搬送装置を備えた本発明による収納ラックの斜視図である。
【図2】図1の一部分に対応する搬送装置の拡大斜視図である。
【図3】容器支持体と出し入れされる容器を概略的に表す収納ラックの図である。
【図4】図3からの抽出部分の拡大図である。
【図5】図2の線V−Vに沿った搬送装置の断面図である。
【図6】搬送装置の縦断面図である。
【図7】第1の搬送手段の上面図である。
【図8】第1の搬送手段の側面図である。
【発明を実施するための形態】
【0028】
図1は、16ラック・ユニット20,22を有する小物部品収納庫の形の本発明による収納ラック10の概略的な構造を示し、ここでは、8ラック・ユニット20が、第1の列に隣り合って配列され、8ラック・ユニット22が、第2の列に隣り合って配列されている。これらの2つのラック・ユニット間の空間には、搬送シャフトに可動式に配列され、収納庫から容器を出し入れするための搬送装置60がある。この実施形態では、例えば、在庫に入れられる4つの容器50、51、52、53と、取り出される4つの容器54、55、56、57が、操作されている(図2を参照)。しかしながら、他の数の容器を操作することもできる。
【0029】
入る容器50〜53を適切な収納場所に収納しまたはそこから取り出すことができるように、ラック・ユニット20,22は、対になった容器支持体16が互いに反対側に配置され垂直方向に配置されたスタンション14を有する側壁12を有する(図3,図4を参照)。鋼板70からなる側壁は、それぞれスタンション14に溶接される。各容器の両側59には、2つの対応する容器支持体16で容器を支持する支持バー58がある。
【0030】
図4で分かるように、容器支持体16は、対応する側壁12に組み込まれ、曲折パターンで壁に押し込まれる。これにより、側壁12に比較的頑強な構造をもたせることができる。容器50〜53を収納スペース24〜27に導入し易くするために、容器支持体16は、搬送方向60に面した側にテーパ付き断面を有する。側壁12から突出する各組の2つの隣り合った容器支持体16の間には、容器の支持バー58を収容する溝17が形成される。
【0031】
図1は、また、容器50〜53を収納ラック10に装填したり容器54〜57を収納ラック10から取り出したりすることを可能にする操作ハッチ30を示す。収納スペースの最適な使用を達成するために、操作ハッチ30の領域内には、容器54〜57の高さを測定するための高さ測定装置40が提供される。高さ測定装置40は、容器50〜57を格納するのに必要な高さ単位数を確認することができるように、ラック内の容器支持体16の間の距離に対応する互いの距離でいくつかの光電子ビーム42を備える。制御ユニットは、個別の容器50〜57に必要な格納高さを確立し、好ましくは隣接した収納スペース24〜27の数を識別して、容器50〜53の数を適切な収納スペースに同時に送ることができるようにする。
【0032】
制御可能な搬送装置60は、容器50〜57を出し入れするために、容器50〜57を第1の空間方向Z、第2の空間方向Xおよび第3の空間方向Yに搬送できるように構成される。示した実施形態では、3つの空間方向X、Y、Zは互いに垂直である。以下に、空間方向Zは垂直方向として記述され、空間方向Xは長手方向として記述され、空間方向Yは横断方向として記述される(図1を参照)。
【0033】
容器50〜57の垂直方向、長手方向および横断方向の動きを容易にするために、搬送装置60は、第1の搬送手段70と第2の搬送手段80、ならびに移動装置90を含む(詳細には、図1、図2および図6を参照)。
【0034】
第1の搬送手段70は、駆動機構によって垂直方向Zに移動可能な上昇プラットフォームのように構成され、互いに平行に配列された2つのキャリア71,72を有する。図7と図8に示したように、各キャリア71,72は、ボルト締められた複数のキャリア・モジュール73から組み立てられる。これは、分解可能なキャリア・モジュール73の構造を提供する。
【0035】
第1の搬送手段70は、キャリア71,72の下側の下に延在する2つのプレテンション要素77を備える。各プレテンション要素77は、タイロッドの形の4つのプレテンション・モジュール78を有する。プレテンション要素77の中間部分には、プレテンション要素77によって生成された張力を調整するためのテンショナ79がある。追加または代替として、プレテンション要素77の端部モジュールの端部領域で張力の調整を行うこともできる。中間部分で、プレテンション要素77は、キャリア71,72から離れている。これにより、てこ作用のアームの結果として、搬送装置60と容器50〜57の重量によって生成されたトルクを打ち消すトルクを生成することができる。これにより、キャリア71,72の曲がりが小さくなり、キャリア71,72は、プレテンション要素77のないキャリアよりも大きい荷重を受けることができる。
【0036】
キャリア71,72の組み立ての際、個別のキャリア・モジュール73は互いにボルト締めされる。キャリア71,72の下側には、キャリア・モジュール73への接続箇所のそれぞれに、キャリア71,72から離れて固定されたプレテンション要素77の接続アームが取り付けられる。第1の搬送手段70は、また、斜めに配列された2つの補強要素75と、キャリア71,72の端に2つの横断キャリア74とを備える(図7、図8を参照)。
【0037】
図1から、第1の搬送手段70が、1つのチェーン110と駆動モータから水平方向に突出する2つの駆動シャフト112とをそれぞれ有する合計4つのチェーン駆動機構を有する駆動機構を装備していることが分かる(図示せず)。様々な長さの収納ラック10に適応できるように、様々な長さの駆動シャフト112が使用される。
【0038】
第1の搬送手段70が移動している間にキャリア71,72が横断方向Yに揺動するのを防ぐために、ラック・ユニット20,22の垂直スタンション上に支持された横断キャリア71,72上と支柱76上にいくつかのホイール19が提供される。
【0039】
特に図5と図6から分かるように、第2の搬送手段80は、シャーシ81と、いくつかのホイール82とを有する。これにより、第2の搬送手段80を、2つのラック・ユニット20,22間で長手方向Xに移動させることができる。この移動を達成するために、第1の搬送手段70上に支持されたホイール82を駆動するラック・アンド・ピニオン駆動機構が提供されてもよい。
【0040】
ラック・アンド・ピニオン駆動機構は、いくつかの棚受けモジュール121で構成された棚受け120、棚受け120と係合するピニオン122、およびピニオン122を駆動するためのモータ123を含む。棚受け120が、モジュール構造のものなので、様々な長さの第1の搬送手段70に適合するように適応させることもできる。棚受けモジュール121は、第1の搬送手段70の支柱76上に配置される。ピニオン122とモータ123は、ピニオン122の歯が、棚受け120の歯とすぐに係合できるようにシャーシ81上に配置される(図6を参照)。
【0041】
第2の搬送手段80の動きは、一方では、キャリア71,72のフランジに沿って移動するホイール82によってガイドされる。追加のホイール83は、キャリア71,72の垂直方向に向けられたフランジと係合し、キャリア71,72上のシャーシ81の側面をガイドする働きをする。
【0042】
この実施形態では、搬送装置60上に提供された移動装置90は、例えば、容器50〜57を操作するための4つの移動ユニット100,102、104および106を含む。次に、これらの4つの移動ユニット100〜106の支援で容器50〜53を在庫に入れる手順は、在庫される4つの容器50、51、52および53が操作ハッチ30の近くに配置された図3の状況に応じて説明される。
【0043】
容器50〜53が、操作ハッチ30内に配置された後で、高さ測定装置40が、すべての容器50〜53の高さを確立する。この場合、4つの容器はすべて同じ高さを有する。次に、制御ユニットは、ラック・ユニット20,22のうちの1つに、好ましくは4つの隣り合った利用可能なスペースがある領域を確認する。この場合、例えば、ラック・ユニット22内の収納スペース24、25、26および27が識別される(図3を参照)。
【0044】
移動装置90は、移動ユニット100〜106のそれぞれを容器50〜53のうちの1つと関連付けることができるように準備される。この場合、4つの移動ユニット100〜106はそれぞれ、第2の搬送手段80のシャーシ81上に支持されたキャリア板108を有する。これらのキャリア板108は、互いに離して取り付けられ、水平方向Xに別々に独立に移動させることができる。
【0045】
別の変形では、移動ユニット100〜106は、共通のキャリア板に取り付けられ、一緒に移動させることしかできない。一般に、長手方向Xまたは横断方向Yに互いに隣接して配置することができ、また長手方向Xおよび/または横断方向Yに個々にまたはグループとして移動させることができるいくつかのキャリア板108を提供することができる。また、例えば、2つの移動ユニットが1つのキャリア板108上に支持され、それらが一緒に移動することもできる。さらに、それぞれの移動ユニット100〜106を別々に制御し移動させることができる駆動機構が提供される。
【0046】
特に図2と図6で分かるように、各駆動機構は、1つのチェーン114と2つの駆動シャフト116をそれぞれ含む2つの駆動ユニットで構成される。各チェーン114上に、容器を把持することができる少なくとも1つのキャリッジ117がある。キャリッジ117は、容器の支持バー58の対応する溝と係合することが好ましい。
【0047】
換言すると、いずれの場合も、2つの駆動ユニットが、容器50〜53を1つずつ把持して、操作ハッチ30の作業面から対応する移動ユニット100〜106のキャリア板108上に容器を乗せる。次に、移動ユニット100〜106は、容器50〜53を横断方向Yに同時に移動させる。
【0048】
容器50〜53が、移動装置90によって操作ハッチ30から収集された後、搬送装置60は、容器50〜53を搬送シャフトに沿って長手方向Xと垂直方向Zにのみ移動させることができる。制御ユニットによって割り当てられた位置に達した後、移動ユニット100〜106は、容器50〜53を収納スペース24〜27に押し込む(図3を参照)。
【0049】
容器50〜53が、収納スペース24〜27に入れられた後、この動作のすぐ後に、容器54,55,56,57を取り出すことができる(図3を参照)。搬送装置60が容器54,55の高さまで移動した後で、移動装置90は、移動ユニット100および102を利用して、2つの容器54,55を同時に収納スペースから第2の搬送手段80上に引き出す。次に、第1の搬送手段70は、搬送装置60が容器56,57の高さに達するまで垂直方向Zに下降し、そこで、移動ユニット104および106を利用して、他の2つの容器56,57を収納スペースから第2の搬送手段80上に引き出す。
【0050】
次に、搬送装置60は、操作ハッチ30の高さまで移動し、そして第2の搬送手段80は、4つの容器54〜57をすべて同時に操作ハッチ30に押し込むことができるように長手方向Xに位置決めされる。
【0051】
容器54〜57の引き出しと押し込みは、移動ユニット100〜106の駆動ユニットを利用して、すなわち把持/引き出しユニットとしてのチェーン駆動機構によって、容器50〜53を在庫に入れるための前述のプロセスと同じように実行される。
【0052】
説明した実施形態の特徴は、詳細には、いくつかの容器50〜53または54〜57を在庫に入れそれらを在庫から取り出す際に達成されるより速いアクセス、すなわち収納と取り出しの時間が短いことにある。詳細には、容器を操作ハッチ30に同時に供給することができるか、容器を操作ハッチ30から在庫に同時に入れることができることが好ましい。さらに、移動装置90は、個別の移動ユニットを追加または除去することによってモジュール方式で構成されてもよく、そのようにして、収納ラック10の容量を柔軟に変更できるように適応されてもよい。収納ユニット20,22が追加または除去され、かつ第1の搬送手段70がキャリア・モジュール/搬送手段モジュール73によってモジュール式に適応された場合、これらに応じて、収納ラックの最適な動作を達成できるように移動ユニットの数を変更することができる。
【0053】
前述の一実施形態の例では、4つの移動ユニット100〜106がすべて、第2の搬送手段80上に支持され、従って、第1の搬送手段70上で長手方向Xに一緒に動かすことができる。しかしながら、原理として、あるグループの移動ユニット(例えば、2つの移動ユニット)を別のグループの移動ユニットと全く別に、第2の搬送手段80上に移動可能に配置することができる。
【0054】
いくつかの移動ユニット100〜106を有する移動装置90に関して前に述べた実施形態によって、あるグループのいくつかの容器50〜53(詳細には、4つの容器)を同時に収納スペースに出し入れすることができる。そのようにして、4つの容器50〜53をすべて、ある水平レベルの隣り合った収納ユニットに入れるか、またはまず最初にあるグループの例えば2つの容器を、同じレベルの隣り合うかまたは互いに離れた2つの収納スペースに入れ、第2のステップで、別のグループの2つの容器を別のレベルの隣り合うかまたは互いに離れた収納スペースに入れることができる。
【0055】
最後に、側壁12が、好ましくは格子状パターンで設計されるので、異なる高さの容器50〜57を使用することができ、また前述の高さ測定装置を用いて適切な収納スペースを決定することができる。さらに、容器50〜57は、追加の装填キャリアなしに搬送することができる。好ましい実施形態では、4つの容器50〜53または54〜57の同時の収納と取り出しが可能である。使用される容器50〜57は、従来の小物部品キャリアでもよく、また必要に応じて、異なる高さを有してもよく、また例えば、最大50kgの負荷を保持することができる。
【符号の説明】
【0056】
10 収納ラック
12 側壁
14 スタンション
16 容器支持体
17 溝
18 前面
19 ホイール
20 ラック・ユニット
22 ラック・ユニット
24 収納場所
25 収納場所
26 収納場所
27 収納場所
30 操作ハッチ
40 高さ測定装置
42 光電子ビーム
50 容器
51 容器
52 容器
53 容器
54 容器
55 容器
56 容器
57 容器
58 支持バー
59 (容器の)側面
60 搬送装置
70 第1の搬送手段
71 キャリア
72 キャリア
73 キャリア・モジュール
74 横断キャリア
75 補助要素
76 支柱
77 プレテンション要素
78 プレテンション・モジュール
79 テンショナ
80 第2の搬送手段
81 シャーシ
82 ホイール
83 ホイール
90 移動装置
100 移動ユニット
102 移動ユニット
104 移動ユニット
106 移動ユニット
108 キャリア板
110 チェーン
112 駆動シャフト
114 チェーン
116 駆動シャフト
117 キャリッジ
120 棚受け
121 棚受けモジュール
122 ピニオン
123 モータ
X 第1の水平方向/長手方向
Y 第2の水平方向/横断方向
Z 垂直方向
【特許請求の範囲】
【請求項1】
上下に離間された容器支持体(16)を有する複数のラック・ユニット(20,22)を備えた収納ラック(10)であって、前記支持体が、容器(50〜53)の収納場所を構成するように前記ラック・ユニット(20,22)の両側の側壁(12)に対で配置され、
前記容器(50〜53)は、制御可能な搬送装置(60)によって前記収納場所に出し入れ可能であり、
前記搬送装置(60)は、少なくとも1の第1の搬送手段(70)と1つの第2の搬送手段(80)とを有し、前記第1の搬送手段(70)は、前記垂直方向(Z)に移動可能であり、
前記第2の搬送手段(80)は、前記第1の搬送手段(70)上に支持され、前記第1の搬送手段(70)に対して第1の水平方向(X)に移動可能である収納ラック(10)であって、
いくつかの容器(50〜53)を操作するための移動装置(90)を特徴とし、
前記移動装置(90)は、前記第2の搬送手段(80)上に配列され、前記容器(50〜53)を在庫に入れ在庫から出すためのいくつかの移動ユニット(100,102,104,106)を有し、
各移動ユニット(100,102,104,106)を1つの容器(50〜53)と関連付けることができ、各移動ユニット(100,102,104,106)を個別に制御し移動させることができる収納ラック(10)。
【請求項2】
前記移動装置は、互いに脱着可能ないくつかのモジュール式移動ユニット(100,102,104,106)で構成され、
前記移動ユニットの数は、前記収納ユニットの数に応じて可変である、請求項1に記載の収納ラック。
【請求項3】
前記第1の搬送手段(70)は、互いに着脱可能に接合されたいくつかの搬送手段モジュールで作成され、前記前記モジュールの数は、前記収納ユニットの数に応じて可変である、請求項1または2に記載の収納ラック。
【請求項4】
前記移動ユニットの数は、前記収納ユニットの数および/または前記搬送手段モジュールの数により可変である、請求項1〜3のいずれか1項に記載の収納ラック。
【請求項5】
前記移動ユニット(100,102,104,106)は、把持ユニットおよび/または引き出しユニットとして構成されている、請求項1〜4のいずれか1項に記載の収納ラック。
【請求項6】
前記移動ユニット(100,102,104,106)は、前記第1の水平方向(X)と実質的に直角な第2の水平方向(Y)に各容器(50〜53)を移動させることができるように構成されている、請求項1〜5のいずれか1項に記載の収納ラック。
【請求項7】
前記移動ユニット(100,102,104,106)は、前記容器(50〜53)を少なくともグループで同期的または連続的に在庫に入れるかまたは在庫から出すことができるように構成されている、請求項1〜6のいずれか1項に記載の収納ラック。
【請求項8】
好ましくは把持ユニットとして構成された4つの移動ユニット(100,102,104,106)が設けられている、請求項1〜7のいずれか1項に記載の収納ラック。
【請求項9】
前記容器(50〜53)を出し入れするための少なくとも1つの操作ハッチ(30)を特徴とする、請求項1〜8のいずれか1項に記載の収納ラック。
【請求項10】
前記操作ハッチ(30)の近くに、前記容器(50〜53)の高さを測定するための高さ測定装置(40)があることを特徴とする、請求項1〜9のいずれか1項に記載の収納ラック。
【請求項11】
前記操作ハッチ(30)は、前記容器(50〜53)をすべて在庫に入れかつ/または在庫から出すことができるように寸法決めされていることを特徴とする、請求項1〜10のいずれか1項に記載の収納ラック。
【請求項12】
前記操作ハッチ(30)の前記領域に、前記操作ハッチ(30)を開閉するためのシャッタ装置、詳細には高速扉が設けられていることを特徴とする、請求項1〜11のいずれか1項に記載の収納ラック。
【請求項13】
前記容器支持体(16)は、前記側壁(12)上に格子状に配列されていることを特徴とする、請求項1〜12のいずれか1項に記載の収納ラック。
【請求項14】
前記容器支持体(16)は、前記側壁(12)に曲折形状で押し込まれていることを特徴とする、請求項1〜13のいずれか1項に記載の収納ラック。
【請求項15】
前記容器支持体(16)は、前記容器(50〜53)の前記支持バー(58)を案内することができる溝(17)を備えていることを特徴とする、請求項1〜14のいずれか1項に記載の収納ラック。
【請求項16】
前記第1の搬送手段(70)、前記第2の搬送手段(80)、および/または前記移動ユニット(100,102,104,106)を、ラック・アンド・ピニオン駆動機構および/またはチェーン駆動機構によって移動させることができる、請求項1〜15のいずれか1項に記載の収納ラック。
【請求項1】
上下に離間された容器支持体(16)を有する複数のラック・ユニット(20,22)を備えた収納ラック(10)であって、前記支持体が、容器(50〜53)の収納場所を構成するように前記ラック・ユニット(20,22)の両側の側壁(12)に対で配置され、
前記容器(50〜53)は、制御可能な搬送装置(60)によって前記収納場所に出し入れ可能であり、
前記搬送装置(60)は、少なくとも1の第1の搬送手段(70)と1つの第2の搬送手段(80)とを有し、前記第1の搬送手段(70)は、前記垂直方向(Z)に移動可能であり、
前記第2の搬送手段(80)は、前記第1の搬送手段(70)上に支持され、前記第1の搬送手段(70)に対して第1の水平方向(X)に移動可能である収納ラック(10)であって、
いくつかの容器(50〜53)を操作するための移動装置(90)を特徴とし、
前記移動装置(90)は、前記第2の搬送手段(80)上に配列され、前記容器(50〜53)を在庫に入れ在庫から出すためのいくつかの移動ユニット(100,102,104,106)を有し、
各移動ユニット(100,102,104,106)を1つの容器(50〜53)と関連付けることができ、各移動ユニット(100,102,104,106)を個別に制御し移動させることができる収納ラック(10)。
【請求項2】
前記移動装置は、互いに脱着可能ないくつかのモジュール式移動ユニット(100,102,104,106)で構成され、
前記移動ユニットの数は、前記収納ユニットの数に応じて可変である、請求項1に記載の収納ラック。
【請求項3】
前記第1の搬送手段(70)は、互いに着脱可能に接合されたいくつかの搬送手段モジュールで作成され、前記前記モジュールの数は、前記収納ユニットの数に応じて可変である、請求項1または2に記載の収納ラック。
【請求項4】
前記移動ユニットの数は、前記収納ユニットの数および/または前記搬送手段モジュールの数により可変である、請求項1〜3のいずれか1項に記載の収納ラック。
【請求項5】
前記移動ユニット(100,102,104,106)は、把持ユニットおよび/または引き出しユニットとして構成されている、請求項1〜4のいずれか1項に記載の収納ラック。
【請求項6】
前記移動ユニット(100,102,104,106)は、前記第1の水平方向(X)と実質的に直角な第2の水平方向(Y)に各容器(50〜53)を移動させることができるように構成されている、請求項1〜5のいずれか1項に記載の収納ラック。
【請求項7】
前記移動ユニット(100,102,104,106)は、前記容器(50〜53)を少なくともグループで同期的または連続的に在庫に入れるかまたは在庫から出すことができるように構成されている、請求項1〜6のいずれか1項に記載の収納ラック。
【請求項8】
好ましくは把持ユニットとして構成された4つの移動ユニット(100,102,104,106)が設けられている、請求項1〜7のいずれか1項に記載の収納ラック。
【請求項9】
前記容器(50〜53)を出し入れするための少なくとも1つの操作ハッチ(30)を特徴とする、請求項1〜8のいずれか1項に記載の収納ラック。
【請求項10】
前記操作ハッチ(30)の近くに、前記容器(50〜53)の高さを測定するための高さ測定装置(40)があることを特徴とする、請求項1〜9のいずれか1項に記載の収納ラック。
【請求項11】
前記操作ハッチ(30)は、前記容器(50〜53)をすべて在庫に入れかつ/または在庫から出すことができるように寸法決めされていることを特徴とする、請求項1〜10のいずれか1項に記載の収納ラック。
【請求項12】
前記操作ハッチ(30)の前記領域に、前記操作ハッチ(30)を開閉するためのシャッタ装置、詳細には高速扉が設けられていることを特徴とする、請求項1〜11のいずれか1項に記載の収納ラック。
【請求項13】
前記容器支持体(16)は、前記側壁(12)上に格子状に配列されていることを特徴とする、請求項1〜12のいずれか1項に記載の収納ラック。
【請求項14】
前記容器支持体(16)は、前記側壁(12)に曲折形状で押し込まれていることを特徴とする、請求項1〜13のいずれか1項に記載の収納ラック。
【請求項15】
前記容器支持体(16)は、前記容器(50〜53)の前記支持バー(58)を案内することができる溝(17)を備えていることを特徴とする、請求項1〜14のいずれか1項に記載の収納ラック。
【請求項16】
前記第1の搬送手段(70)、前記第2の搬送手段(80)、および/または前記移動ユニット(100,102,104,106)を、ラック・アンド・ピニオン駆動機構および/またはチェーン駆動機構によって移動させることができる、請求項1〜15のいずれか1項に記載の収納ラック。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公表番号】特表2010−536687(P2010−536687A)
【公表日】平成22年12月2日(2010.12.2)
【国際特許分類】
【出願番号】特願2010−522375(P2010−522375)
【出願日】平成20年8月28日(2008.8.28)
【国際出願番号】PCT/EP2008/061320
【国際公開番号】WO2009/027479
【国際公開日】平成21年3月5日(2009.3.5)
【出願人】(508109966)ヘーネル アンド カンパニー (5)
【Fターム(参考)】
【公表日】平成22年12月2日(2010.12.2)
【国際特許分類】
【出願日】平成20年8月28日(2008.8.28)
【国際出願番号】PCT/EP2008/061320
【国際公開番号】WO2009/027479
【国際公開日】平成21年3月5日(2009.3.5)
【出願人】(508109966)ヘーネル アンド カンパニー (5)
【Fターム(参考)】
[ Back to top ]