
搬送装置及び加熱処理装置
【課題】搬送対象物を安定かつ円滑に搬送できる搬送装置およびその搬送装置を使用し、管状又は棒状の搬送対象物を加熱する熱効率を向上することのできる、加熱処理装置を提供する。
【解決手段】3つ以上の搬送ローラ1の軸心の並び方向に搬送する場合に、隣接して配置される3つの搬送ローラ1それぞれに関し搬送対象物を下部より支持する第一位置制御と、搬送対象物を支持搬送ローラの上部搬送方向中央側に案内する第二位置制御と、搬送対象物を受取り、搬送方向下流側に案内する第三位置制御とを実行し、搬送方向に並ぶ3つの搬送ローラ1の組み合わせを、搬送方向において逐次組み替えながら、搬送対象物を、搬送方向に搬送する。
【解決手段】3つ以上の搬送ローラ1の軸心の並び方向に搬送する場合に、隣接して配置される3つの搬送ローラ1それぞれに関し搬送対象物を下部より支持する第一位置制御と、搬送対象物を支持搬送ローラの上部搬送方向中央側に案内する第二位置制御と、搬送対象物を受取り、搬送方向下流側に案内する第三位置制御とを実行し、搬送方向に並ぶ3つの搬送ローラ1の組み合わせを、搬送方向において逐次組み替えながら、搬送対象物を、搬送方向に搬送する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、軸心が平行な3つ以上の搬送ローラのそれぞれに対して、管状又は棒状の搬送対象物を搬送ローラと平行に当接する搬送姿勢に維持した状態で、搬送対象物を3つ以上の搬送ローラの並び方向に搬送する搬送装置および前記搬送装置を備えた加熱処理装置に関する。
【背景技術】
【0002】
従来の搬送装置は、多数の管状または棒状の搬送対象物の搬送経路が無端回動経路となるように、多数の搬送ローラを軸心が平行な姿勢で水平方向に並べて形成されていて、前記搬送ローラの上側搬送経路部分に、管状体を搬送ローラ列の搬送ローラと同じ横向きの搬送姿勢に載置して、搬送ローラ列を搬送経路に沿って移動させながら、各搬送ローラを回転させることで、搬送ローラ列上に載置されたそれら搬送対象物を回転させながら水平方向に搬送していた。
【0003】
そして、その搬送装置を用いた加熱処理装置は、上側搬送経路部分に沿って設けられた加熱域にそれら搬送対象物を回転させながら搬送して通過させることで、搬送対象物をその周方向全周において均等的に加熱処理することができるように構成にしてあった。(特許文献1参照)
【0004】
一方、このような管状搬送対象物の搬送経路が無端回動経路となる加熱炉では、加熱域で搬送対象物を加熱する過程において、搬送ローラも同時に加熱されて高温になる。しかし、戻り側では、周囲雰囲気によって搬送ローラが冷却されてしまい、前記搬送ローラが加熱炉内に戻ってくると、その冷却された搬送ローラを再度加熱することになるため、搬送対象物の加熱とは別に、さらにエネルギーが必要である。このような加熱と冷却のサイクルを繰り返すことが大きな熱ロスを生じる原因となっており、エネルギー節約のため熱ロスの少ない搬送手段が要求されている。
【0005】
これに対し、特許文献2に示すように、搬送ローラを異形断面に形成するとともに、その搬送ローラを軸心周りに揺動することにより、前記搬送ローラに支持される搬送対象物が、前記搬送ローラを乗り越えて順次移送される構成の搬送装置が考えられている。(特許文献2参照)
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2005−343664号公報
【特許文献2】特開2000−255740号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかし、このような構成の搬送装置では、前記搬送ローラを特殊な異形断面に形成せねばならない。また、搬送ローラが異形断面であるため、前記搬送ローラ間に搬送対象物がはさまれて不均一な圧縮力を受けたり、前記搬送ローラ間で搬送対象物が受け渡される際に衝撃力を受けたりしやすいという問題点がある。このような問題点がある場合、前記搬送対象物が、例えばガラス管等の易破損物である場合に、その搬送対象物を破損するおそれがある。そのため、前記搬送対象物を、より安定かつ円滑に搬送できる搬送装置およびこのような搬送装置を備えた加熱処理装置が望まれていた。
【0008】
本発明は、搬送対象物を安定かつ円滑に搬送できる搬送装置およびその搬送装置を使用し、管状又は棒状の搬送対象物を加熱する熱効率を向上することのできる、加熱処理装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
〔構成〕
本発明の搬送装置の特徴構成は、
軸心が平行な3つ以上の搬送ローラのそれぞれに対して、管状又は棒状の搬送対象物を搬送ローラと平行に当接する搬送姿勢に維持した状態で、各搬送ローラの位置保持或は位置移動を含む位置制御により、搬送対象物を3つ以上の搬送ローラの並び方向に搬送するにあたって、
隣接して配置される3つの前記搬送ローラそれぞれの位置制御に関し、
搬送対象物を下部より支持する支持搬送ローラの位置制御である第一位置制御と、
搬送対象物が前記支持搬送ローラに当接した状態で、前記搬送対象物を、前記支持搬送ローラの上部搬送方向中央側に案内する上流側搬送ローラの位置制御である第二位置制御と、
搬送対象物が前記支持搬送ローラに当接した状態で、前記搬送対象物を、前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する下流側搬送ローラの位置制御である第三位置制御と、
を実行可能に構成され、
前記搬送方向に並ぶ3つの搬送ローラの組み合わせを、前記搬送方向において逐次組み替えながら、前記3つの搬送ローラの組み合わせ内で、
前記上流側搬送ローラの前記第二位置制御と前記支持搬送ローラの前記第一位置制御により、前記搬送対象物を、前記支持搬送ローラの上部搬送方向中央側まで案内する第一搬送動作と、
前記支持搬送ローラの前記第一位置制御と前記下流側搬送ローラの前記第三位置制御とにより、前記搬送対象物を、前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する第二搬送動作とを実行し、
前記搬送対象物を前記搬送方向に搬送する点にある。
【0010】
〔作用効果〕
軸心が平行な3つ以上の搬送ローラのそれぞれに対して、管状又は棒状の搬送対象物を搬送ローラと平行に当接する搬送姿勢に維持すると、搬送対象物を下方から搬送ローラにより支持することができる。
【0011】
この搬送ローラの位置保持或いは位置移動を含む位置制御を行うと、以下の位置制御を順に行うことによって、搬送対象物を3つ以上の搬送ローラの並び方向に搬送することができる。
【0012】
隣接して配置される3つの前記搬送ローラそれぞれの位置制御に関し、
搬送対象物を下部より支持する支持搬送ローラの位置制御である第一位置制御と、
搬送対象物が前記支持搬送ローラに当接した状態で、前記搬送対象物を、前記支持搬送ローラの上部搬送方向中央側に案内する上流側搬送ローラの位置制御である第二位置制御と、
搬送対象物が前記支持搬送ローラに当接した状態で、前記搬送対象物を、前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する下流側搬送ローラの位置制御である第三位置制御と、
を実行されると、
支持搬送ローラを基準に考えたときに、上流側搬送ローラは、前記支持搬送ローラの上流側斜め上方に相対移動し、下流側搬送ローラは、前記支持搬送ローラの下流側斜め上方に相対移動する。
【0013】
すると、位置制御される前に支持ローラの上流側斜め上方に支持された搬送対象物が、前記上流側搬送ローラに押し上げられるとともに、前記搬送対象物が、前記支持搬送ローラの上部搬送方向中央側に案内されることになる。
【0014】
ここで、前記支持搬送ローラの上部搬送方向中央側に案内された前記搬送対象物は、前記支持搬送ローラの上部中央を乗り越えて移動する。
【0015】
前記搬送対象物が前記支持搬送ローラを乗り越えるときに、前記下流側搬送ローラが、前記支持搬送ローラの下流側斜め上方に移動している。そのため、前記支持搬送ローラを乗り越えて移動した前記搬送対象物は、前記下流側搬送ローラに受け止められた状態で前記支持搬送ローラに支持された状態になる。(第一搬送動作)
【0016】
上述の位置制御の後、各搬送ローラを基準位置に復帰すると、前記搬送対象物は、下流側搬送ローラの上流側斜め上方に支持される状態になり、搬送方向下流側に案内されることになる。(第二搬送動作)
【0017】
したがって、前記搬送方向に並ぶ3つの搬送ローラの組み合わせを、前記搬送方向において逐次組み替えながら、前記3つの搬送ローラの組み合わせることにより、
前記上流側搬送ローラの前記第二位置制御と前記支持搬送ローラの前記第一位置制御により、前記搬送対象物を、前記支持搬送ローラの上部搬送方向中央側まで案内する第一搬送動作と、
前記支持搬送ローラの前記第一位置制御と前記下流側搬送ローラの前記第三位置制御とにより、前記搬送対象物を、前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する第二搬送動作と、
を実行しつつ前記搬送対象物を前記搬送方向に搬送することができるようになる。
【0018】
その結果、前記第一搬送動作から第二搬送動作に至る工程で、搬送対象物は、前記支持搬送ローラの上部において前記上流側搬送ローラと前記支持搬送ローラとの間で保持される状態から、前記支持搬送ローラと下流側搬送ローラとの間で保持される状態に受け渡されることになる。このとき、前記支持搬送ローラと前記上流側搬送ローラ、前記支持搬送ローラと前記下流側搬送ローラは近接した状態となっており、上流側搬送ローラと下流側搬送ローラとも近接しているため、搬送対象物が受け渡される際に慣性で移動する距離は少なく、受渡動作における搬送対象物に対する衝撃が加わりにくい。さらに、前記搬送対象物は、前記支持搬送ローラの上部で受け渡されるから、前記搬送対象物の移動速度も加速されにくく、さらに搬送対象物が円滑に受け渡し搬送される状態となっているといえる。
【0019】
〔構成〕
また上記構成において、前記第一位置制御が、前記支持搬送ローラが元位置に保持される位置保持制御であり、前記第二位置制御が、前記停止状態にある前記支持搬送ローラに対して、前記上流側搬送ローラが前記支持搬送ローラの上部上流側表面に沿って移動する上昇移動と、前記上昇移動前の元位置に復帰する下降移動とを実行する第二往復移動制御であり、前記第三位置制御が、前記停止状態にある前記支持搬送ローラに対して、前記下流側搬送ローラが前記支持搬送ローラの上部下流側表面に沿って移動する上昇移動と、前記上昇移動前の元位置に復帰する下降移動とを実行する第三往復移動制御であってもよい。
【0020】
〔作用効果〕
つまり、前記第一位置制御が、前記支持搬送ローラが元位置に保持される位置保持制御であれば、前記支持搬送ローラは、第一位置制御において、静止状態となる。
【0021】
このとき、前記第二位置制御が、前記停止状態にある前記支持搬送ローラに対して、前記上流側搬送ローラが前記支持搬送ローラの上部上流側表面に沿って移動する上昇移動を行うと、前記上流側搬送ローラが前記搬送対象物を前記支持搬送ローラに対し持ちあげる前記第一搬送動作を行うことができる。
【0022】
また、前記上昇移動前の元位置に復帰する下降移動を実行する第二往復移動制御を行うことにより、前記下流側搬送ローラが、前記支持搬送ローラから搬送対象物を受け取って搬送方向下流側に案内する第二搬送動作を行うことができる。
【0023】
その結果、上記、受渡動作における搬送対象物に対する衝撃が加わりにくく、搬送対象物が円滑に受け渡し搬送される状態を実現することができる。
【0024】
〔構成〕
また上記構成において、前記第一位置制御が、前記支持搬送ローラが、元位置における搬送方向の位置を維持したまま、下降移動をした後、下降前の元位置に復帰する第一往復移動制御であり、
前記第二位置制御が、前記第一往復移動制御中の前記支持搬送ローラに対して、前記上流側搬送ローラが前記支持搬送ローラの上部上流側表面に沿って移動する上昇移動と、上昇移動前の元位置に復帰する下降移動とを含む第二往復移動制御であり、
前記第三位置制御が、前記第一往復移動制御中の前記支持搬送ローラに対して、前記下流側搬送ローラが前記支持搬送ローラの上部下流側表面に沿って移動する上昇移動と、移動前の元位置に復帰する下降移動とを含む第三往復移動制御であってもよい。
【0025】
〔作用効果〕
つまり、前記第一位置制御が、前記支持搬送ローラが、元位置における搬送方向の位置を維持したまま、下降移動をした後、下降前の元位置に復帰する第一往復移動制御であれば、前記支持搬送ローラは、第一位置制御において上下移動し、前記第一搬送動作時に下降移動し、前記第二搬送動作時に上昇移動する構成とすることができる。
【0026】
このとき、前記第二位置制御が、前記第一往復移動制御中の前記支持搬送ローラに対して、前記上流側搬送ローラが前記支持搬送ローラの上部上流側表面に沿って移動する上昇移動と、上昇移動前の元位置に復帰する下降移動とを含む第二往復移動制御を行うと、前記上昇移動により前記搬送対象物に対して前記第一搬送動作を行うことができ、前記上昇移動前の元位置に復帰する下降移動を行うことにより、前記上流側搬送ローラが前記搬送対象物に対して前記第二搬送動作を行える。
【0027】
また、前記第三位置制御が、前記第一往復移動制御中の前記支持搬送ローラに対して、前記下流側搬送ローラが前記支持搬送ローラの上部下流側表面に沿って移動する上昇移動と、移動前の元位置に復帰する下降移動とを含む第三往復移動制御を行うと、前記上昇移動により、前記搬送対象物に対して前記下流側搬送ローラが前記第一搬送動作を行うことができ、前記上昇移動前の元位置に復帰する下降移動を行うことにより、前記搬送対象物に対して前記下流側搬送ローラが前記第二搬送動作を行える。
【0028】
すると、各搬送ローラが、すべて位置制御により移動しつつ、全体として少ない移動動作で搬送対象物を搬送する搬送動作が行えることになる。また、前記支持搬送ローラが下降しつつ、前記上流側搬送ローラが前記搬送対象物を押し上げるので、前記搬送対象物は、少ない上下移動(理想的には搬送対象物が水平方向に等速移動する状態)で第一搬送動作が行える。
【0029】
その結果、上記、受渡動作における搬送対象物に対してさらに衝撃が加わりにくく、搬送対象物が円滑に受け渡し搬送される状態を実現することができる。
【0030】
〔構成〕
また、前記第一位置制御が、
搬送ローラが、前記支持搬送ローラとして働き、搬送方向下流側へ下降しながら移動する支持搬送ローラ制御であり、
前記第二位置制御が、
前記搬送方向下流側へ下降しながら移動する前記支持搬送ローラに対して、搬送ローラが、前記上流側搬送ローラとして働き、前記支持搬送ローラの上部上流側表面に沿って移動する上流側搬送ローラ制御であり、
前記第三位置制御が、
前記上流側搬送ローラ動作の完了後、前記支持搬送ローラ動作の始点位置である元位置へ復帰する下流側搬送ローラ制御であってもよい。
【0031】
〔作用効果〕
つまり、前記第一位置制御が、前記搬送ローラを支持搬送ローラとして駆動させるものであり、搬送方向下流側へ下降しながら移動すると、前記搬送ローラは、前記下流側搬送ローラとして、搬送対象物を受け取った受け取り姿勢から、下流側に移動する搬送対象物を下部より支持する姿勢に位置変更することができる。
【0032】
前記第二位置制御が、前記搬送ローラを上流側搬送ローラとして駆動させるものであり、前記支持搬送ローラの上部上流側表面に沿って移動すると、前記搬送ローラは、前記搬送対象物を下部から支持する姿勢から、下流側に搬送対象物を送り出す姿勢に位置変更することができる。
【0033】
前記第三位置制御が、前記搬送ローラを下流側搬送ローラとして駆動させるものであり、上流側搬送ローラ動作の完了後、前記支持搬送ローラ動作の始点位置である元位置へ復帰する移動を行うと、前記搬送ローラは、前記搬送対象物を送り出した姿勢から、前記搬送対象物を受け取る姿勢に位置変更することができる。
【0034】
すると、前記搬送ローラは、常時位置移動しながら、前記上流側搬送ローラと支持搬送ローラとの関係で搬送対象物を搬送する第一搬送動作を実行することができるとともに、前記支持搬送ローラと前記下流側搬送ローラとの関係で第二搬送動作を行うことができる。また、この第一〜第三位置制御によると搬送ローラは搬送対象物に対する支持姿勢、送り出し姿勢、受け取り姿勢に順次移動し、常時位置移動して搬送対象物を移動させているので、高い搬送効率で搬送対象物を搬送することができる利点がある。
【0035】
その結果、上記、受渡動作における搬送対象物に対してさらに円滑に受け渡し搬送できる状態を実現することができる。
【0036】
〔構成〕
また、上記構成において、前記3つ以上の搬送ローラを搬送方向順に、(kを自然数として)
n=3k−2番目の搬送ローラを第一搬送ローラ群、
n=3k−1番目の搬送ローラを第二搬送ローラ群、
n=3k番目の搬送ローラを第三搬送ローラ群に群分けし、
前記第一搬送ローラ群、第二搬送ローラ群及び第三搬送ローラ群に対して、それぞれ別個に位置制御を行う位置制御機構を設け、
各位置制御機構が、前記第二位置制御、前記第一位置制御及び前記第三位置制御を順次実行するように構成され、
前記第一搬送ローラ群が前記第二位置制御を、前記第二搬送ローラ群が前記第一位置制御を、前記第三搬送ローラ群が前記第三位置制御を、実行する初期状態を起点として、各位置制御機構が順次、前記第二位置制御、前記第一位置制御及び前記第三位置制御を、順に繰返すように構成しても良い。
【0037】
〔作用効果〕
上記構成において前記第一〜第三位置制御を行う搬送ローラは、3個一組で搬送対象物を移動させるものであり、前記搬送方向に並ぶ3つの搬送ローラの組み合わせを、前記搬送方向において逐次組み替えながら、位置制御されることにより第一、第二搬送動作を行うから、多数の搬送ローラを三群に分け、群毎に前記第一搬送ローラ群が前記第二位置制御を、前記第二搬送ローラ群が前記第一位置制御を、前記第三搬送ローラ群が前記第三位置制御を、実行する初期状態を起点として、各位置制御機構が順次、前記第二位置制御、前記第一位置制御及び前記第三位置制御を、順に繰返すようにすると、搬送対象物は、連続的に多数の搬送ローラにわたって搬送移動させられることになる。
【0038】
〔構成〕
また、前記搬送装置を、前記搬送ローラを軸心周りに回転自在に構成するとともに、前記搬送対象物を搬送ローラの軸心と並行に接当する搬送姿勢に維持した状態で、それら搬送ローラを同じ向きに回転し、前記搬送対象物を3つ以上の搬送ローラの軸心の並び方向に回転させながら搬送可能に構成してあっても良い。
【0039】
〔作用効果〕
軸心が平行な3つ以上の搬送ローラのそれぞれに対して、管状又は棒状の搬送対象物を搬送ローラと平行に当接する搬送姿勢に維持すると、搬送対象物を下方から搬送ローラにより支持することができる。この姿勢で、それら搬送ローラを同じ向きに回転させると、搬送対象物をその軸心周りに回転させながら支持することができる。また、
この搬送ローラの位置保持或いは位置移動を含む位置制御を行うと、搬送対象物を3つ以上の搬送ローラの並び方向に搬送することができる。
【0040】
したがって、搬送対象物を効率よく搬送しつつ、しかも、搬送対象物を、その搬送対象物の軸心周りで均等に姿勢変更させることができ、前記搬送対象物を周方向に均等に加熱処理する、塗膜形成する、などの用途で有利に使用することができる搬送装置を提供することができた。
【0041】
〔構成〕
また、本発明の加熱処理装置の特徴構成は、上記搬送装置を備え、内部に加熱対象物を挿入させた管状の前記搬送対象物を回転させながら加熱域に通過させ、前記加熱対象物を回転させながら加熱処理する点にある。
【0042】
〔作用効果〕
すなわち、上記搬送装置によると、各搬送ローラは、加熱域内の比較的狭い領域で限られた位置移動を繰り返すだけで搬送対象物を円滑に搬送移動させることができるので、前記加熱域の内外を出入りして加熱、冷却の熱サイクルを受けないことになり、加熱域外に無駄な放熱が行われるという熱ロスを生じず、エネルギー節約のため効率の良い加熱処理が行える熱処理装置の搬送装置とすることができる。
【0043】
また、搬送対象物は搬送ローラに対して当接した搬送姿勢を維持することができるので、搬送ローラによる搬送対象物の回転を安定化させることができ、よって、振動等による搬送対象物の破損を抑制することができる。また、この搬送装置は搬送対象物を回転させながら搬送するため、加熱域中で搬送対象物の周方向全周に対してムラなく均一的に処理を施すことができ、各処理装置の運転に支障を来たしたりすることも抑制することができる。
【発明の効果】
【0044】
したがって、搬送対象物を安定かつ円滑に搬送できる搬送装置およびその搬送装置を備えた加熱処理装置を提供することができ、管状又は棒状の搬送対象物を加熱する熱効率を向上することができ、省エネルギー性能を高めることができた。
【図面の簡単な説明】
【0045】
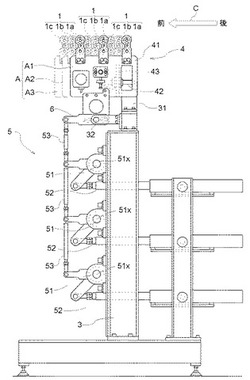
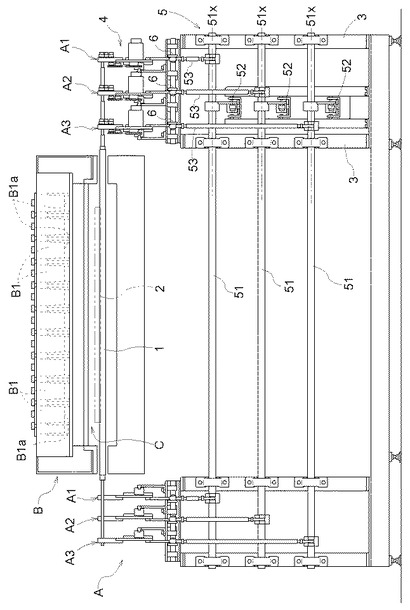
【図1】第一実施形態の加熱処理装置の側面図
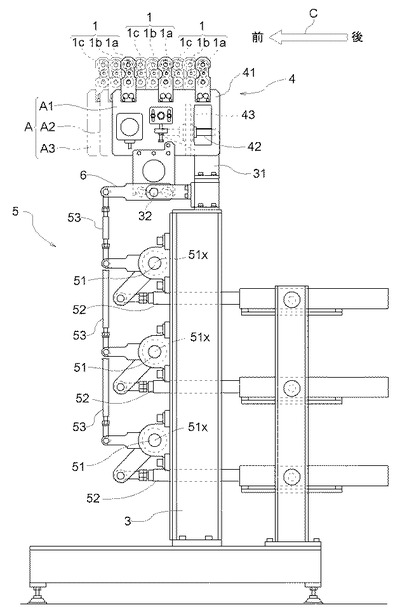
【図2】第一実施形態の加熱処理装置の正面図
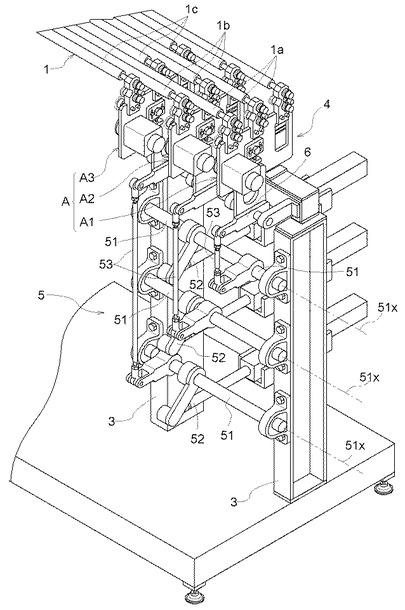
【図3】第一実施形態の搬送装置におけるローラ駆動装置の斜視図
【図4】第一実施形態の搬送装置におけるローラ駆動装置の要部斜視図
【図5】第一実施形態の搬送装置におけるローラ駆動装置の要部斜視図
【図6】第一実施形態の搬送装置における搬送対象物の搬送動作作用説明図
【図7】第一実施形態の搬送装置の搬送動作の位置制御作用説明図
【図8】第一実施形態の搬送装置の搬送動作の位置制御作用説明図
【図9】第二実施形態の加熱処理装置の側面図
【図10】第二実施形態の加熱処理装置の正面図
【図11】第二実施形態の搬送装置におけるローラ駆動装置の斜視図
【図12】第二実施形態の搬送装置の搬送動作の位置制御作用説明図
【図13】第三実施形態の搬送装置における搬送動作の作用説明図
【図14】第四実施形態の搬送装置における搬送動作の作用説明図
【発明を実施するための形態】
【0046】
以下に、本発明の搬送装置および加熱処理装置を説明する。尚、以下に好適な実施形態を記すが、これら実施形態はそれぞれ、本発明をより具体的に例示するために記載されたものであって、本発明の趣旨を逸脱しない範囲において種々変更が可能であり、本発明は、以下の記載に限定されるものではない。
【0047】
<第一実施形態>
〔1.加熱処理装置〕
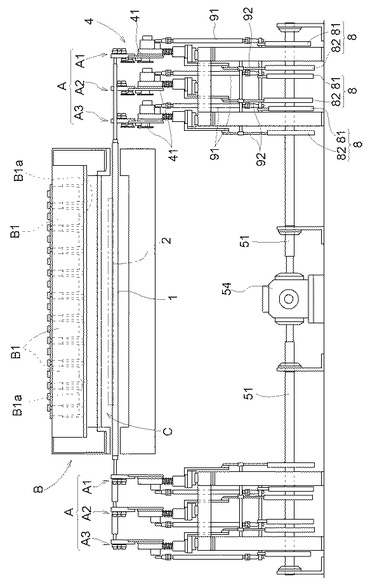
本発明の加熱処理装置は、図1〜3に示すように本発明の搬送装置Aの上方に、前記搬送装置Aの上面を形成する多数の搬送ローラ1、1、1………列に載置された管状又は棒状の搬送対象物2を加熱自在な加熱炉Bを横架姿勢で設けて構成されている。前記搬送対象物2としては、例えば、蛍光灯用ランプ管が用いられ、前記蛍光灯用ランプ管を加熱炉により加熱して蛍光膜を焼成するのに用いられる。
【0048】
〔1−1.加熱炉〕
加熱炉Bは、図2に示すように、搬送装置Aの前記多数の搬送ローラ1、1、1………列上部に形成される搬送経路Cにおいて搬送されている搬送対象物2を焼成処理するために炎口B1aが下向きのバーナーB1を、搬送経路Cにおける搬送対象物2の搬送方向及び横幅方向のそれぞれについて複数並べた状態で、搬送経路Cに沿わせて上方から垂下支持した状態で配設されており、前記搬送経路Cにおける加熱炉BのバーナーB1の下方部分を加熱域として、回転軸心が平行な3つ以上の搬送ローラ1、1、1………のそれぞれに対して、搬送対象物2としてのランプ管を搬送ローラ1、1、1………の回転軸心と平行に当接する搬送姿勢に維持した状態で、それら搬送ローラ1、1、1………を同じ向きに回転させながら通過させることで、バーナーB1により搬送経路Cに搬送されているランプ管の内面に塗布された蛍光膜用塗膜を加熱して蛍光膜を焼成する。
【0049】
〔1−2.搬送装置〕
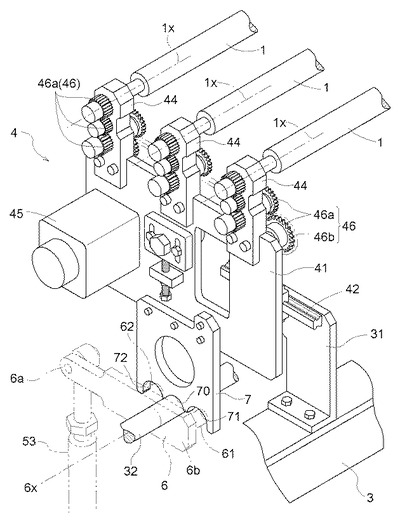
前記搬送装置Aは、図1〜3に示すように、第一〜第三ローラ駆動装置A1〜A3がそれぞれ左右一対の基台3に固定されるとともに、前記各ローラ駆動装置間A1〜A3、A1〜A3間に横架して設けられる多数の搬送ローラ1、1、1………を備えて構成されている。前記各ローラ駆動装置A1〜A3は、前記基台3に対して前記多数の搬送ローラ1、1、1………の搬送対象物2の搬送方向(以下前後方向とする)および上下方向に変位自在に支持される架台部4を設けて、その架台部4を、前後、上下方向に揺動させる位置制御機構5を設けて構成してある。
【0050】
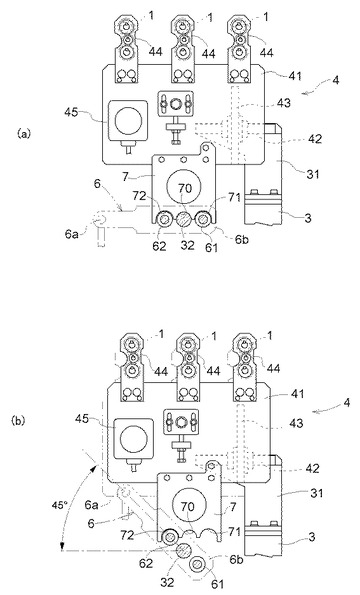
〔1−2−1.架台部〕
前記架台部4は、図4、5に示すように、前記基台3に前後方向に沿う面状に起立形成された立壁部31に、支持板41を、横スライダ42、縦スライダ43を介して取り付けてある。前記支持板41には、搬送ローラ1(図示する例では、理解を容易にするために3本としてある)をその軸心1x周りに回転自在に定置するローラ支持部44を設けてある。また、前記ローラ支持部44に固定した搬送ローラ1を回転駆動するためのモータ45を設け、前記モータ45の回転駆動力を前記搬送ローラ1に伝達する動力伝達機構46を、複数のギア46a、46a………およびチェーン46bで構成して前記支持板41に固定して設けてある。
【0051】
〔1−2−2.位置制御機構〕
前記位置制御機構5は、図1〜3に示すように、前記基台3、3にわたって、水平軸心51x周りに回転自在に支持される連動部材51を設け、
左右一対の基台3、3のうち一方に、前記連動部材51を回転駆動操作するシリンダ駆動部52を設け、
前記連動部材51の回転に伴って、一端部が水平揺動軸心6x周りに上下揺動される揺動部材6を、前記一端部6aにおいて前記連動部材51にリンク部材53により連結して設け、
前記揺動部材6の揺動に伴って、前後方向の縦面に沿ってスライド移動するプレート部材7を設け、前記プレート部材7を、前記架台部4の支持板41に固定することにより、前記シリンダ駆動部52の駆動力を、前記プレート部材7に支持される搬送ローラ1の搬送対象物2に対する搬送動作として伝達するように構成してある。
また、左右一対の基台3、3のうち他方についても、前記連動部材51を介して伝動されるシリンダ駆動部52の駆動力を、同期して前記搬送ローラ1に伝達するリンク部材53、揺動部材6、プレート部材7をそれぞれ設けて、隣接して配置される3つの前記搬送ローラ1、1、1それぞれに対し、各搬送ローラ1、1、1の位置保持或は位置移動を含む位置制御を行う構成とする(図2参照)。
【0052】
前記揺動部材6は、図4、5に示すように、前記基台3、3に横架支持される軸部材32の軸心を水平揺動軸心6xとして、揺動自在に設けられている。前記揺動部材6は、一端部6a側に連結された前記リンク部材53の上下動にしたがって揺動される。
【0053】
前記揺動部材6には、前記水平揺動軸心6xよりも前記一端部6aとは反対側の他端部6b側に第一接当部61を設けるとともに、前記水平揺動軸心6xを挟んで前記一端部6a側に第二接当部62を設けてある。また、前記プレート部材7には、前記軸部材32に係合する支持凹部70および前記第一、第二接当部61、62に係合する第一、第二揺動凹部71、72を設けてある。
【0054】
これにより、前記揺動部材6の一端部6aが揺動された低姿勢において(図7参照)、第一接当部61が前記第一揺動凹部71に係合して、前記軸部材32を支点として前記プレート部材7が前記第一接当部61により、搬送対象物2の搬送方向の前上方に移動させられる。すなわち、前記プレート部材7に連設される支持板41に固定された搬送ローラ1は、前記搬送ローラ1を上流側搬送ローラとして、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を回転させながら、前記支持搬送ローラの上部搬送方向中央側に案内する第二位置制御が行われる。
また、前記揺動部材6の一端部6aが揺動された高姿勢において(図8参照)、前記第二接当部62が前記第二揺動凹部72に接当して前記プレート部材7が前記第二接当部62により、搬送対象物2の搬送方向の後上方に移動させられる。すなわち、前記プレート部材7に連設される支持板41に固定された搬送ローラ1は、前記搬送ローラ1を下流側搬送ローラとして、搬送対象物2が前記支持搬送ローラに当接した状態で、回転しながら、前記支持搬送ローラの上部搬送方向中央側を乗り越えた搬送対象物を受取り、搬送方向下流側に案内する第三位置制御が行われる。
尚、前記揺動部材6の一端部6aを中央位置に維持しておけば、前記搬送ローラ1を支持搬送ローラとして、搬送対象物2を下部より支持する第一位置制御を行える。
【0055】
〔1−2−3.ローラ支持部〕
図1〜3に示すように、前記搬送装置は、前記第一〜第三ローラ駆動装置A1〜A3を前記基台3、3に備え、それぞれの前記ローラ駆動装置A1〜A3に設けられる架台部4において、前記支持板41が搬送ローラ1を支持するローラ支持部44を前記搬送対象物2を搬送する搬送方向に順次位置ずれさせて設けてある。これにより、前記搬送ローラ1は、
前記搬送ローラ1を搬送方向順に、(kを自然数とすると)
n=3k−2番目の搬送ローラ1を第一搬送ローラ群1a、
n=3k−1番目の搬送ローラ1を第二搬送ローラ群1b
n=3k番目の搬送ローラ1を第三搬送ローラ群1cに群分けすると、
前記第一搬送ローラ群1aは、第一ローラ駆動装置A1に、第二搬送ローラ群1bは、第二ローラ駆動装置A2に、第三搬送ローラ1c群は、第三ローラ駆動装置A3に支持された構成となり、これらローラ群1a〜1cに対して、それぞれ別個に位置制御を行う位置制御機構5を設けた構成となる。
【0056】
したがって、前記第一搬送ローラ群1aが前記第二位置制御を、前記第二搬送ローラ群1bが前記第一位置制御を、前記第三搬送ローラ群1cが前記第三位置制御を、実行する初期状態を起点として、各位置制御機構5が順次、前記第二往復移動制御、前記位置保持制御及び前記第三往復移動制御を、順に繰返すことができる。
【0057】
〔1−3.搬送動作〕
上記構成により、前記第一〜第三ローラ駆動装置A1〜A3を独立に駆動制御すると、隣接して配置される3つの前記搬送ローラ1、1、1それぞれの位置制御に関し、
搬送対象物2を下部より支持する支持搬送ローラと、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側に案内する上流側搬送ローラと、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する下流側搬送ローラとの関係において、
図7(a)に示すように、前記搬送ローラ1を、支持搬送ローラとして、搬送対象物2を下部より支持する位置制御である第一位置制御として、前記支持搬送ローラが元位置に保持される位置保持制御を行うことができる。
また、図7(b)に示すように、前記搬送ローラ1を上流側搬送ローラとして、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側に案内する位置制御である第二位置制御として、前記停止状態にある前記支持搬送ローラに対して、前記上流側搬送ローラが前記支持搬送ローラの上部上流側表面に沿って移動することにより、搬送対象物を前記支持搬送ローラの上部中央に向かって押しあげ乗り越えさせる上昇移動と、前記上昇移動前の元位置に復帰する下降移動とを実行する第二往復移動制御を行うことができる。
さらに、図8(b)に示すように、前記搬送ローラ1を下流側搬送ローラとして、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側を乗り越えた搬送対象物を前記支持搬送ローラから受取り、搬送方向下流側に案内する位置制御である第三位置制御として、前記停止状態にある前記支持搬送ローラに対して、前記下流側搬送ローラが前記支持搬送ローラの上部下流側表面に沿って移動する上昇移動と、前記上昇移動前の元位置に復帰する下降移動とを実行する第三往復移動制御を行うことができる。
【0058】
尚、上流側搬送ローラの移動量は、前記搬送対象物を支持搬送ローラの上部中央を乗り越えさせられるように設定してあり、具体的には、前記第二往復移動制御による上流側搬送ローラの移動量は52°に設定してある。また、下流側搬送ローラは、前記搬送対象物を支持搬送ローラの上部中央を乗り越えた姿勢から、静かに受け取ることができる位置にまで移動するように設定してあり、具体的には、前記第三往復移動制御による下流側搬送ローラの移動量は45°としてある。つまり、上流側搬送ローラの移動量を、下流側搬送ローラの移動量よりも大に設定してある。これにより、上流側搬送ローラが、前記搬送対象物を前記支持搬送ローラの上部搬送方向中央側まで案内する場合、下流側搬送ローラが前記搬送対象物を前記支持搬送ローラの上部搬送方向中央側から受取る姿勢よりも、支持搬送ローラ中央側に寄った姿勢になるので、前記搬送対象物が、前記支持搬送ローラの中央上部を乗り越えやすい動きとすることができる。
【0059】
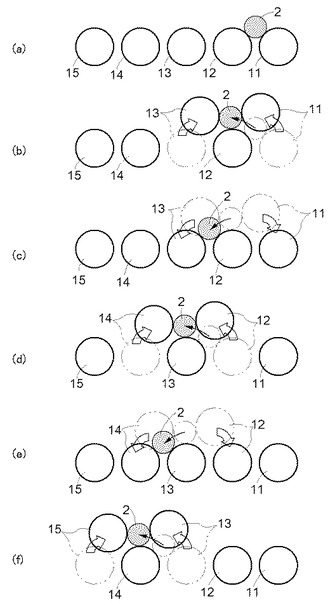
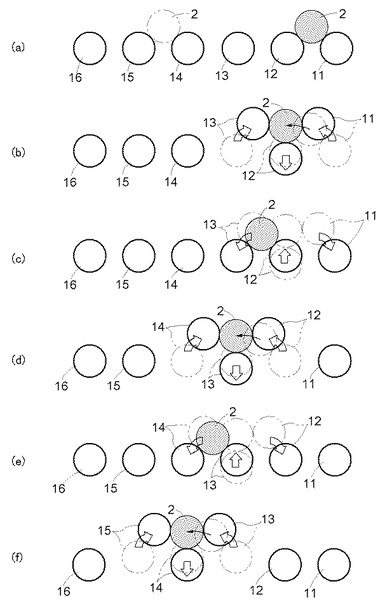
これら第一〜第三位置制御を行うと、前記搬送対象物は、図6に示すように、各位置制御機構5が、前記第二往復移動制御、前記位置保持制御、及び前記第三往復移動制御を順次実行するように構成される。具体的には、図6においてn番目の搬送ローラを1nと表示したときに、(この表記は、特に図6、13、14の搬送動作の作用説明図のみで行う)搬送ローラ11を上流側搬送ローラとして前記第二位置制御としての前記第二往復移動制御を行い、搬送ローラ12を支持搬送ローラとして前記第一位置制御としての前記位置保持制御を行い、搬送ローラ13を下流側搬送ローラとして、前記第三位置制御としての第三往復移動制御を行う。
【0060】
すると、前記搬送対象物2は、搬送ローラ11により前記上流側搬送ローラの前記第二位置制御(第二往復移動制御)と、前記搬送ローラ12の支持搬送ローラとしての前記第一位置制御(位置保持制御)により、前記搬送ローラ12に支持された状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側まで案内する第一搬送動作が行われ、図6(a)の状態から図6(b)の状態に遷移する。同時に前記搬送ローラ12の支持搬送ローラとしての前記第一位置制御(位置保持制御)と前記搬送ローラ13の下流側搬送ローラとしての前記第三位置制御(第三往復移動制御)とにより、前記搬送対象物2は前記搬送ローラ12に支持された状態から、前記搬送ローラ13が、前記搬送対象物2を前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する第二搬送動作が行われ、図6(b)の状態から図6(c)の状態に遷移する。
【0061】
その結果、前記搬送対象物2は、前記搬送ローラ12に支持され前記搬送ローラ11により前記搬送ローラ12に沿って第一搬送動作され、前記搬送ローラ13によって第二搬送動作される姿勢から、前記搬送ローラ13に支持され、前記搬送ローラ12により前記搬送ローラ13に沿って第一搬送動作され、前記搬送ローラ14によって第二搬送動作される姿勢に変化する(図6(c)から図6(e)を行うことができる状態)。そのため、前記第二往復移動制御、前記位置保持制御及び前記第三往復移動制御を行う搬送ローラ1を順次、前進側に単位搬送ローラ毎にずらせて行うと(次に、搬送ローラ12、13、14を上流側搬送ローラ、支持搬送ローラ、下流側搬送ローラとした位置制御を行い、次に搬送ローラ13、14、15の組、搬送ローラ14、15、16の組というように順に行うと)、搬送対象物2を順次下流側の搬送ローラ1に(搬送ローラ11に対して搬送ローラ12、搬送ローラ12に対して搬送ローラ13、搬送ローラ13に対して搬送ローラ14というように)支持させる状態に搬送することができる。
【0062】
<第二実施形態>
先の実施形態では、位置制御機構5をシリンダ駆動部51により駆動される揺動部材6およびプレート部材7とを設けて構成し、前記架台部4が前記揺動部材6により揺動され位置制御されるものとしたが、揺動部材6の揺動に代えてカム8の運動により前記架台部を位置制御する構成とすることもできる。
以下にカムを用いた位置制御機構5を説明する。尚、前の第一実施形態と同様の構成については、同一符号を付して詳細な説明を省略してある。
【0063】
〔2.搬送装置〕
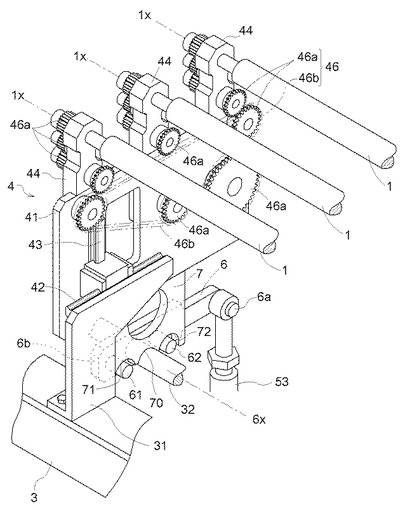
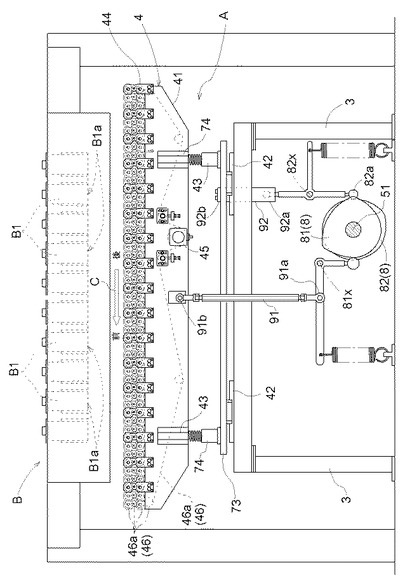
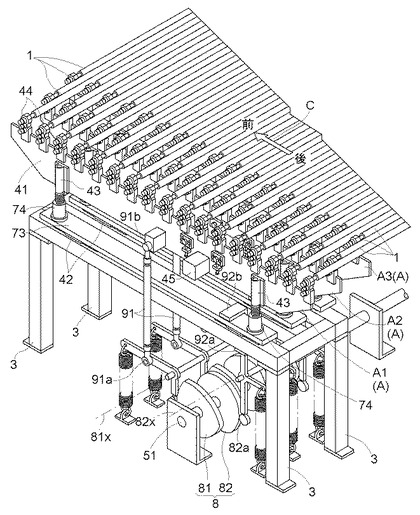
前記搬送装置Aは、図9〜11に示すように、第一〜第三ローラ駆動装置A1〜A3がそれぞれ左右一対の基台3に固定されるとともに、前記各ローラ駆動装置間A1〜A3、A1〜A3間に横架して設けられる多数の搬送ローラ1、1、1………を備えて構成されている。前記各ローラ駆動装置A1〜A3は、前後および上下方向に変位自在に支持される架台部4を設け、前記架台部4に対する位置制御機構5を設けて構成してある。
【0064】
〔2−1.架台部〕
前記架台部4は、図9〜11に示すように、基台3に対し、横スライダ42を介して前後スライド移動自在にプレート部材73を取り付けて設けるとともに、前記プレート部材73に台部74を設け、縦スライダ43を介して前記支持板41上下スライド移動自在に連設してある。前記支持板41には、搬送ローラ1(本実施形態では17本)のローラ支持部44を設けてある。また、搬送ローラ1を回転駆動するためのモータ45を設け、前記モータ45の回転駆動力を前記搬送ローラ1に伝達するギア46aおよびチェーン46bからなる動力伝達機構46を前記支持板41に固定してある。
【0065】
〔2−2.位置制御機構〕
前記位置制御機構5は、図9〜11に示すように、前記基台3、3にわたって、水平軸心周りに回転自在に支持される連動部材51を設け、前記連動部材を、その軸心周りに回転駆動するモータ54を設けてある。前記連動部材51における前記基台下方には、各ローラ駆動装置A1〜A3毎に2枚一対のカム8を設け、前記モータ54により前記連動部材51の回転に伴って軸心周りに回転駆動自在に構成してある。
【0066】
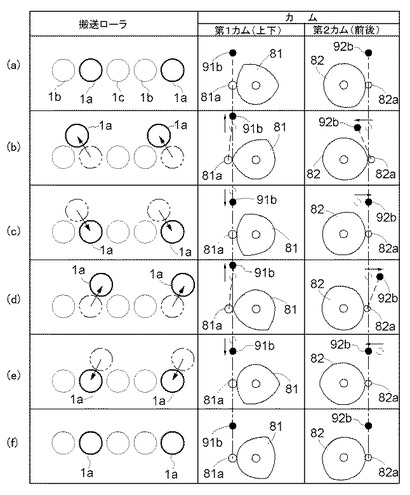
前記カム8は前記架台部4を上下に揺動させるための第一カム81と、前後に揺動させるための第二カム82とを備えてなり、前記第一、第二カム81、82にはそれぞれ第一、第二カムフォロワ81a、82aを設ける。前記第一カムフォロワ81aには、前記第一カムフォロワ81aの移動に追従して一端部91aが水平軸心81x周りに上下揺動される上下揺動アーム91を設けるとともに、前記上下揺動アームの他端部91bを前記支持板41に連設してある。前記第二カムフォロワ82aには、一端部92aが水平軸心82x周りに前後揺動される前後揺動アーム92を設け、前記前後揺動アーム92の他端部92bを前記プレート部材73に連設してある。
【0067】
また、左右一対の基台3のうち他方についても、前記連動部材51を介して伝動されるモータ54の駆動力を、同期して前記搬送ローラ1に伝達するカム8、上下、前後揺動アーム91、92、プレート部材74をそれぞれ設けて、前記搬送ローラ1の位置制御を行う構成とする(図9、10参照)。
【0068】
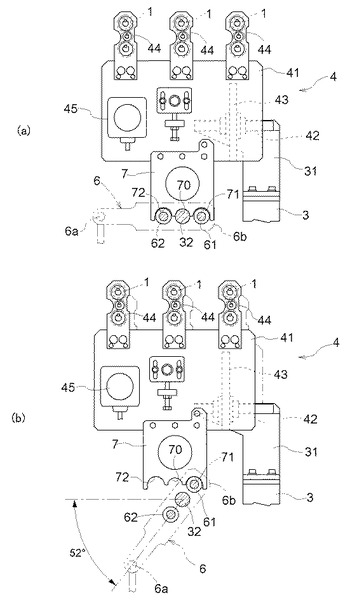
また、前記第一〜第三ローラ駆動装置には、それぞれ、図12に示す第一、第二カムを120°位相をずらせた状態で設けられている。
【0069】
これにより、前記モータ54が駆動されると、前記第一、第二カムが回転することにより前記カムフォロワが図12のように揺動し、図12(a)の姿勢から前記図12(b)の姿勢に移動すると、前記第一カムフォロワ81aが前記上下揺動アーム91を前方側動かすために、前記支持板41が上方に動く。一方第二カムフォロワ82aが、前記前後揺動アーム92を後方に動かすために、前記プレート部材73が前記支持板41とともに前方に動く。その結果、前記支持板41に設けられた搬送ローラ1は上流側搬送ローラとして、支持搬送ローラとしての上部上流側表面に沿って移動する上昇移動する。
次に、図12(b)の姿勢から前記図12(c)の姿勢に移動すると、前記第一カムフォロワ81aが前記上下揺動アーム91を下方に動かすために、前記支持板41が下方に動く。一方第二カムフォロワ82aが、前記前後揺動アーム92を前方に動かすために、前記プレート部材73が前記支持板41とともに後方に動く。その結果、前記支持板41に設けられた搬送ローラ1は上昇移動前の元位置に復帰する。
この動作を、順次行うと、図12(a)から図12(c)のように、前記搬送ローラ1を上流側搬送ローラとして、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側に案内する第二位置制御を行い、図12(c)から図12(e)ののように、前記搬送ローラ1を下流側搬送ローラとして、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する第三位置制御を行えることになる。また、図12(e)から図12(f)に至り図12(a)に戻る静止した状態が、前記搬送ローラ1を支持ローラとして搬送対象物2を下部より支持する第一位置制御に該当する。
【0070】
〔2−3.ローラ支持部〕
図9〜11に示すように、前記搬送装置は、前記第一〜第三ローラ駆動装置A1〜A3を前記基台3に備え、それぞれの前記ローラ駆動装置A1〜A3に設けられる架台部4において、前記支持板41が搬送ローラ1を支持するローラ支持部44を前記搬送対象物2を搬送する搬送方向に順次位置ずれさせて設けてある。これにより、前記搬送ローラ1は、
前記搬送ローラ1を搬送方向順に、(kを自然数とすると)
n=3k−2番目の搬送ローラ1を第一搬送ローラ群1a、
n=3k−1番目の搬送ローラ1を第二搬送ローラ群1b、
n=3k番目の搬送ローラ1を第三搬送ローラ群1cに群分けすると、
前記第一搬送ローラ群1aは、第一ローラ駆動装置A1に、第二搬送ローラ群1bは、第二ローラ駆動装置A2に、第三搬送ローラ群1cは、第三ローラ駆動装置A3に支持された構成となり、これらローラ群1a〜1cに対して、それぞれ別個に位置制御を行う位置制御機構5を設けた構成となる。
【0071】
したがって、前記第一搬送ローラ群1aが前記第二位置制御を、前記第二搬送ローラ群1bが前記第一位置制御を、前記第三搬送ローラ群1cが前記第三位置制御を、実行する初期状態を起点として、各位置制御機構5が順次、前記第二位置制御、前記第一位置制御及び前記第三位置制御を、順に繰返すことができる。
【0072】
〔2−4.搬送動作〕
上記構成により、前記第一〜第三ローラ駆動装置A1〜A3を独立に駆動制御すると、隣接して配置される3つの前記搬送ローラ1、1、1それぞれの位置制御に関し、
搬送対象物2を下部より支持する支持搬送ローラと、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側に案内する上流側搬送ローラと、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する下流側搬送ローラとの関係において、
図12(a)〜図12(c)に示すように、前記搬送ローラ1を上流側搬送ローラとして、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側に案内する位置制御である第二位置制御として、前記停止状態にある前記支持搬送ローラに対して、前記上流側搬送ローラが前記支持搬送ローラの上部上流側表面に沿って移動する上昇移動(図12(a)〜図12(b))と、前記上昇移動前の元位置に復帰する下降移動(図12(b)〜図12(c))とを実行する第二往復移動制御を行うことができる。
尚、図12においては、第一搬送ローラ群1aの位置制御のみを、具体的に示している。
【0073】
また、図12(c)〜図12(e)に示すように、前記搬送ローラ1を下流側搬送ローラとして、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する位置制御である第三位置制御として、前記停止状態にある前記支持搬送ローラに対して、前記下流側搬送ローラが前記支持搬送ローラの上部下流側表面に沿って移動する上昇移動(図12(c)〜図12(d))と、前記上昇移動前の元位置に復帰する下降移動とを実行する第三往復移動制御を行うことができる。
【0074】
さらに、図12(e)〜図12(f)の動きに続いて、図12(a)に戻る位地制御により、前記搬送ローラ1を、支持搬送ローラとして、搬送対象物2を下部より支持する位置制御である第一位置制御として、前記支持搬送ローラが元位置に保持される位置保持制御を行うことができる。
【0075】
これら第一〜第三位置制御を行うと、前記搬送対象物2は、図6に示すように、各位置制御機構5が、前記第二往復移動制御、前記第一往復移動制御及び前記第三往復移動制御を順次実行するように構成される。具体的には、図6においてn番目の搬送ローラを1nと表示したときに、搬送ローラ11を上流側搬送ローラとして前記第二位置制御としての前記第二往復移動制御を行い、搬送ローラ12を支持搬送ローラとして前記第一位置制御としての前記位置保持制御を行い、搬送ローラ13を下流側搬送ローラとして、前記第三位置制御としての第三往復移動制御を行う。
【0076】
すると、前記搬送対象物2は、搬送ローラ11により前記上流側搬送ローラの前記第二位置制御(第二往復移動制御)と、前記搬送ローラ12の支持搬送ローラとしての前記第一位置制御(位置保持制御)により、前記搬送ローラ12に支持された状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側まで案内する第一搬送動作が行われ、図6(a)の状態から図6(b)の状態に遷移する。同時に前記搬送ローラ12の支持搬送ローラとしての前記第一位置制御(位置保持制御)と前記搬送ローラ13の下流側搬送ローラとしての前記第三位置制御(第三往復移動制御)とにより、前記搬送対象物2は前記搬送ローラ12に支持された状態から、前記搬送ローラ13が、前記搬送対象物2を前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する第二搬送動作が行われ、図6(b)の状態から図6(c)の状態に遷移する。
【0077】
その結果、前記搬送対象物2は、前記搬送ローラ12に支持され前記搬送ローラ11により前記搬送ローラ12に沿って第一搬送動作され、前記搬送ローラ13によって第二搬送動作される姿勢から、前記搬送ローラ13に支持され、前記搬送ローラ12により前記搬送ローラ13に沿って第一搬送動作され、前記搬送ローラ14によって第二搬送動作される姿勢に変化する(図6(c)から図6(e)を行うことができる状態)。そのため、前記第二往復移動制御、前記位置保持制御及び前記第三往復移動制御を行う搬送ローラ1を順次ずらせて行うと(次に、搬送ローラ12、13、14を上流側搬送ローラ、支持搬送ローラ、下流側搬送ローラとした位置制御を行い、次に搬送ローラ13、14、15の組、搬送ローラ14、15、16の組というように順に行うと)、搬送対象物2を順次下流側の搬送ローラ1に(搬送ローラ11に対して搬送ローラ12、搬送ローラ12に対して搬送ローラ13、搬送ローラ13に対して搬送ローラ14というように)支持させる状態に搬送することができる。
【0078】
<第三実施形態>
第二実施形態における位置制御機構5のカムの形状を変更することによって、前記搬送対象物2の搬送動作をより円滑に動作させることもできる。
以下にカムを用いた位置制御機構5を説明する。尚、前の第二実施形態と同様の構成については、同一符号を付して詳細な説明を省略してある。
【0079】
〔3.搬送動作〕
前記第一〜第三ローラ駆動装置A1〜A3を独立に駆動制御すると、隣接して配置される3つの前記搬送ローラ1、1、1それぞれの位置制御に関し、
搬送対象物2を下部より支持する支持搬送ローラと、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側に案内する上流側搬送ローラと、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する下流側搬送ローラとの関係において、
まず、前記第一位置制御として、前記支持搬送ローラが、元位置における搬送方向の位置を維持したまま、下降移動をした後、下降前の元位置に復帰する第一往復移動制御を実行可能に構成してある。具体的には、図13においてn番目の搬送ローラを1nと表示したときに、搬送ローラ12が、図13(a)〜図13(c)にわたって行う位置制御である。
【0080】
次に、第二位置制御として、前記第一往復移動制御中の前記支持搬送ローラに対して、前記上流側搬送ローラが前記支持搬送ローラの上部上流側表面に沿って移動する上昇移動と、上昇移動前の元位置に復帰する下降移動とを含む第二往復移動制御を実行可能に構成してある。具体的には、搬送ローラ12が図13(c)〜図13(e)にわたって行う位置制御である。
【0081】
さらに、第三位置制御として、前記第一往復移動制御中の前記支持搬送ローラに対して、前記下流側搬送ローラが前記支持搬送ローラの上部下流側表面に沿って移動する上昇移動と、移動前の元位置に復帰する下降移動とを含む第三往復移動制御を実行可能に構成してある。具体的には、搬送ローラ12が図13(e)〜図13(f)にわたって動作した後、図13(a)に復帰する位置制御である。
【0082】
これら第一〜第三位置制御を行うと、前記搬送対象物2は、図13に示すように、各位置制御機構5が、前記第二往復移動制御、前記第一往復移動制御及び前記第三往復移動制御を順次実行するように構成される。具体的には、搬送ローラ11を上流側搬送ローラとして前記第二位置制御としての前記第二往復移動制御を行い、搬送ローラ12を支持搬送ローラとして前記第一位置制御としての前記第一往復移動制御を行い、搬送ローラ13を下流側搬送ローラとして、前記第三位置制御としての第三往復移動制御を行う。
【0083】
すると、前記搬送対象物2は、搬送ローラ11により前記上流側搬送ローラの前記第二位置制御(第二往復移動制御)と、前記搬送ローラ12の支持搬送ローラとしての前記第一位置制御(第一往復移動制御)により、前記搬送ローラ12に支持された状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側まで案内する第一搬送動作が行われ、図13(a)の状態から図13(b)の状態に遷移する。同時に前記搬送ローラ12の支持搬送ローラとしての前記第一位置制御(第一往復移動制御)と前記搬送ローラ13の下流側搬送ローラとしての前記第三位置制御(第三往復移動制御)とにより、前記搬送対象物2は前記搬送ローラ12に支持された状態から、前記搬送ローラ13が、前記搬送対象物2を前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する第二搬送動作が行われ、図13(b)の状態から図13(c)の状態に遷移する。
【0084】
その結果、前記搬送対象物2は、前記搬送ローラ12に支持され前記搬送ローラ11により前記搬送ローラ12に沿って第一搬送動作され、前記搬送ローラ13によって第二搬送動作される姿勢から、前記搬送ローラ13に支持され、前記搬送ローラ12により前記搬送ローラ13に沿って第一搬送動作され、前記搬送ローラ14によって第二搬送動作される姿勢に変化する(図13(c)から図13(e)を行うことができる状態)。そのため、前記第二往復移動制御、前記位置保持制御及び前記第三往復移動制御を行う搬送ローラ1を順次ずらせて行うと(次に、搬送ローラ12、13、14を上流側搬送ローラ、支持搬送ローラ、下流側搬送ローラとした位置制御を行い、次に搬送ローラ13、14、15の組、搬送ローラ14、15、16の組というように順に行うと)、搬送対象物2を順次下流側の搬送ローラ1に(搬送ローラ11に対して搬送ローラ12、搬送ローラ12に対して搬送ローラ13、搬送ローラ13に対して搬送ローラ14というように)支持させる状態に搬送することができる。
【0085】
すると、図13に示すように、搬送対象物2に対する上流側搬送ローラ、支持搬送ローラ、下流側搬送ローラが、すべて位置制御により移動しつつ、全体として少ない移動動作で搬送対象物2を搬送する搬送動作が行える。また、前記支持搬送ローラが下降しつつ、前記上流側搬送ローラが前記搬送対象物2を押し上げるので、前記搬送対象物2は、ほぼ水平移動する状態で第一搬送動作が行える。
【0086】
その結果、上記、受渡動作における搬送対象物2に対してさらに衝撃が加わりにくく、搬送対象物2が円滑に受け渡し搬送される状態を実現することができる。
【0087】
<第四実施形態>
第二実施形態における位置制御機構5のカムの形状を変更することによって、前記搬送対象物2の搬送動作をさらに異なる形態に動作させることもできる。
【0088】
〔4.搬送動作〕
前記第一〜第三ローラ駆動装置A1〜A3を独立に駆動制御して、隣接して配置される3つの前記搬送ローラ1、1、1それぞれの位置制御に関し、
搬送対象物2を下部より支持する支持搬送ローラと、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側に案内する上流側搬送ローラと、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する下流側搬送ローラとの関係において、
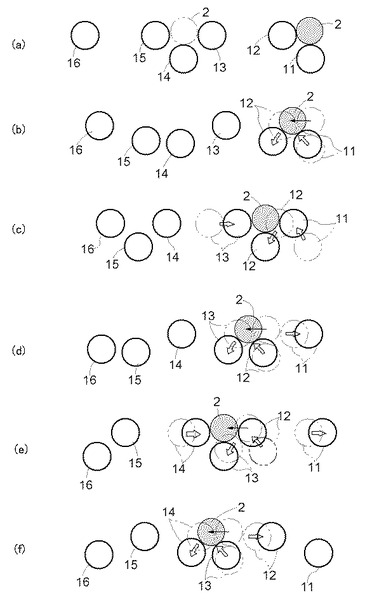
まず、前記第一位置制御として、前記支持搬送ローラとして働き、搬送方向下流側へ下降しながら移動する支持搬送ローラ制御を実行可能に構成してある。具体的には、図14においてn番目の搬送ローラを1nと表示したときに、搬送ローラ12が、図14(a)から図14(b)の中間状態を経て図14(c)まで行う位置制御である。
【0089】
次に、第二位置制御として、前記搬送方向下流側へ下降しながら移動する前記支持搬送ローラに対して、搬送ローラが、前記上流側搬送ローラとして働き、前記支持搬送ローラの上部上流側表面に沿って移動する上流側搬送ローラ制御を実行可能に構成してある。具体的には、搬送ローラ12が図14(c)から図14(d)の中間状態を経て図14(e)まで行う位置制御である。
【0090】
さらに、第三位置制御として、前記上流側搬送ローラ動作の完了後、前記支持搬送ローラ動作の始点位置である元位置へ復帰する下流側搬送ローラ制御を実行可能に構成してある。具体的には、搬送ローラ12が図14(e)から図14(f)の中間状態を経て図14(a)に戻る位置制御である。
【0091】
これら第一〜第三位置制御を行うと、前記搬送対象物2は、図14に示すように、各位置制御機構5が、前記上流側搬送ローラ制御、前記支持搬送ローラ制御及び前記下流側搬送ローラ制御を順次実行するように構成される。具体的には、搬送ローラ11を上流側搬送ローラとして前記第二位置制御としての前記上流側搬送ローラ制御を行い、搬送ローラ12を支持搬送ローラとして前記第一位置制御としての前記支持搬送ローラ制御を行い、搬送ローラ13を下流側搬送ローラとして、前記第三位置制御としての下流側搬送ローラ制御を行う。
【0092】
すると、前記搬送対象物2は、搬送ローラ11により前記上流側搬送ローラの前記第二位置制御(上流側搬送ローラ制御)と、前記搬送ローラ12の支持搬送ローラとしての前記第一位置制御(支持搬送ローラ制御)により、前記搬送ローラ12に支持された状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側まで案内する第一搬送動作が行われる。同時に前記搬送ローラ12の支持搬送ローラとしての前記第一位置制御(支持搬送ローラ制御)と前記搬送ローラ13の下流側搬送ローラとしての前記第三位置制御(下流側搬送ローラ制御)とにより、前記搬送対象物2は前記搬送ローラ12に支持された状態から、前記搬送ローラ13が、前記搬送対象物2を前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する第二搬送動作が行われ、図14(a)の状態から図14(c)の状態に遷移する。
【0093】
その結果、前記搬送対象物2は、前記搬送ローラ12に支持され前記搬送ローラ11により前記搬送ローラ12に沿って第一搬送動作され、前記搬送ローラ13によって第二搬送動作される姿勢から、前記搬送ローラ13に支持され、前記搬送ローラ12により前記搬送ローラ13に沿って第一搬送動作され、前記搬送ローラ14によって第二搬送動作される姿勢に変化する(図14(c)から図14(e)の動作を行うことができる状態)。そのため、前記第二往復移動制御、前記位置保持制御及び前記第三往復移動制御を行う搬送ローラ1を順次ずらせて行うと(次に、搬送ローラ12、13、14を上流側搬送ローラ、支持搬送ローラ、下流側搬送ローラとした位置制御を行い、次に搬送ローラ13、14、15の組、搬送ローラ14、15、16の組というように順に行うと)、搬送対象物2を順次下流側の搬送ローラ1に(搬送ローラ11に対して搬送ローラ12、搬送ローラ12に対して搬送ローラ13、搬送ローラ13に対して搬送ローラ14というように)支持させる状態に搬送することができる。
【0094】
すると、図14に示すように、搬送対象物2に対する上流側搬送ローラ、支持搬送ローラ、下流側搬送ローラが、すべて位置制御により移動しつつ、全体として少ない移動動作で搬送対象物2を搬送する搬送動作が行える。また、前記支持搬送ローラが下降しつつ、前記上流側搬送ローラが前記搬送対象物2を押し上げるので、前記搬送対象物2は、ほぼ水平移動する状態で第一搬送動作が行える。
【0095】
その結果、上記、受渡動作における搬送対象物2に対してさらに衝撃が加わりにくく、搬送対象物2が円滑に受け渡し搬送される状態を実現することができる。また、第四実施形態によると、搬送ローラがほぼ三角形をなすように無駄なく動くので(図14)、前記第三実施形態では、6ステップで搬送対象物を3ピッチ(搬送ローラ3本分)搬送させるのに対し、前記第四実施形態では、3ステップで3ピッチ搬送させることができるようになり、効率の良い搬送が可能となった。
【0096】
尚、上述の第一〜第四実施形態は、加熱処理装置としての実施形態を示したので、搬送ローラを回転させつつ搬送対象物を搬送し、均一に加熱自在な構成としたが、均一に加熱するなど、特段の必要が搬送ローラを回転することなく(搬送対象物を回転させずに)、搬送動作を行うこともできる。
【産業上の利用可能性】
【0097】
本発明の搬送装置は、種々の管状又は棒状の搬送対象物2を円滑に搬送することができるので、易破損物搬送用の搬送装置として好適に適用することができる。また、本発明の加熱処理装置は、種々の管状又は棒状の搬送対象物2を円滑に搬送しつつ加熱することができ、熱効率も高いので、ランプ管の蛍光膜の焼成等易破損物を搬送しつつ均一に加熱処理する場合に好適に使用することができる。これにより、搬送対象物を安定かつ円滑に搬送できる搬送装置およびその搬送装置を提供することができ、管状又は棒状の搬送対象物を加熱する場合に、加熱と冷却のサイクルを繰り返すことが大きな熱ロスを生じる事がなく、省エネルギー性能を高めることができる加熱処理装置として用いることができる。
【符号の説明】
【0098】
A 搬送装置
A1〜A3 第一〜第三ローラ駆動装置
B 加熱炉
B1 バーナー
B1a 炎口
C 搬送経路
1(11〜16)搬送ローラ
1x 軸心
2 搬送対象物
3 基台
31 立壁部
32 軸部材
4 架台部
41 支持板
42 横スライダ
43 縦スライダ
44 ローラ支持部
45 モータ
46 動力伝達機構
46a ギア
46b チェーン
5 位置制御機構
51 連動部材
51x 軸心
52 シリンダ駆動部
53 リンク部材
54 モータ
6 揺動部材
6a 一端部
6b 他端部
6x 水平揺動軸心
61 第一接当部
62 第二接当部
7 プレート部材
70 支持凹部
71 第一揺動凹部
72 第二揺動凹部
73 プレート部材
74 台部
8 カム
81 第一カム
81a 第一カムフォロワ
81x 水平軸心
82 第二カム
82a 第二カムフォロワ
82x 水平軸心
91 上下揺動アーム
91a 一端部
91b 他端部
92 前後揺動アーム
92a 一端部
92b 他端部
【技術分野】
【0001】
本発明は、軸心が平行な3つ以上の搬送ローラのそれぞれに対して、管状又は棒状の搬送対象物を搬送ローラと平行に当接する搬送姿勢に維持した状態で、搬送対象物を3つ以上の搬送ローラの並び方向に搬送する搬送装置および前記搬送装置を備えた加熱処理装置に関する。
【背景技術】
【0002】
従来の搬送装置は、多数の管状または棒状の搬送対象物の搬送経路が無端回動経路となるように、多数の搬送ローラを軸心が平行な姿勢で水平方向に並べて形成されていて、前記搬送ローラの上側搬送経路部分に、管状体を搬送ローラ列の搬送ローラと同じ横向きの搬送姿勢に載置して、搬送ローラ列を搬送経路に沿って移動させながら、各搬送ローラを回転させることで、搬送ローラ列上に載置されたそれら搬送対象物を回転させながら水平方向に搬送していた。
【0003】
そして、その搬送装置を用いた加熱処理装置は、上側搬送経路部分に沿って設けられた加熱域にそれら搬送対象物を回転させながら搬送して通過させることで、搬送対象物をその周方向全周において均等的に加熱処理することができるように構成にしてあった。(特許文献1参照)
【0004】
一方、このような管状搬送対象物の搬送経路が無端回動経路となる加熱炉では、加熱域で搬送対象物を加熱する過程において、搬送ローラも同時に加熱されて高温になる。しかし、戻り側では、周囲雰囲気によって搬送ローラが冷却されてしまい、前記搬送ローラが加熱炉内に戻ってくると、その冷却された搬送ローラを再度加熱することになるため、搬送対象物の加熱とは別に、さらにエネルギーが必要である。このような加熱と冷却のサイクルを繰り返すことが大きな熱ロスを生じる原因となっており、エネルギー節約のため熱ロスの少ない搬送手段が要求されている。
【0005】
これに対し、特許文献2に示すように、搬送ローラを異形断面に形成するとともに、その搬送ローラを軸心周りに揺動することにより、前記搬送ローラに支持される搬送対象物が、前記搬送ローラを乗り越えて順次移送される構成の搬送装置が考えられている。(特許文献2参照)
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2005−343664号公報
【特許文献2】特開2000−255740号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかし、このような構成の搬送装置では、前記搬送ローラを特殊な異形断面に形成せねばならない。また、搬送ローラが異形断面であるため、前記搬送ローラ間に搬送対象物がはさまれて不均一な圧縮力を受けたり、前記搬送ローラ間で搬送対象物が受け渡される際に衝撃力を受けたりしやすいという問題点がある。このような問題点がある場合、前記搬送対象物が、例えばガラス管等の易破損物である場合に、その搬送対象物を破損するおそれがある。そのため、前記搬送対象物を、より安定かつ円滑に搬送できる搬送装置およびこのような搬送装置を備えた加熱処理装置が望まれていた。
【0008】
本発明は、搬送対象物を安定かつ円滑に搬送できる搬送装置およびその搬送装置を使用し、管状又は棒状の搬送対象物を加熱する熱効率を向上することのできる、加熱処理装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
〔構成〕
本発明の搬送装置の特徴構成は、
軸心が平行な3つ以上の搬送ローラのそれぞれに対して、管状又は棒状の搬送対象物を搬送ローラと平行に当接する搬送姿勢に維持した状態で、各搬送ローラの位置保持或は位置移動を含む位置制御により、搬送対象物を3つ以上の搬送ローラの並び方向に搬送するにあたって、
隣接して配置される3つの前記搬送ローラそれぞれの位置制御に関し、
搬送対象物を下部より支持する支持搬送ローラの位置制御である第一位置制御と、
搬送対象物が前記支持搬送ローラに当接した状態で、前記搬送対象物を、前記支持搬送ローラの上部搬送方向中央側に案内する上流側搬送ローラの位置制御である第二位置制御と、
搬送対象物が前記支持搬送ローラに当接した状態で、前記搬送対象物を、前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する下流側搬送ローラの位置制御である第三位置制御と、
を実行可能に構成され、
前記搬送方向に並ぶ3つの搬送ローラの組み合わせを、前記搬送方向において逐次組み替えながら、前記3つの搬送ローラの組み合わせ内で、
前記上流側搬送ローラの前記第二位置制御と前記支持搬送ローラの前記第一位置制御により、前記搬送対象物を、前記支持搬送ローラの上部搬送方向中央側まで案内する第一搬送動作と、
前記支持搬送ローラの前記第一位置制御と前記下流側搬送ローラの前記第三位置制御とにより、前記搬送対象物を、前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する第二搬送動作とを実行し、
前記搬送対象物を前記搬送方向に搬送する点にある。
【0010】
〔作用効果〕
軸心が平行な3つ以上の搬送ローラのそれぞれに対して、管状又は棒状の搬送対象物を搬送ローラと平行に当接する搬送姿勢に維持すると、搬送対象物を下方から搬送ローラにより支持することができる。
【0011】
この搬送ローラの位置保持或いは位置移動を含む位置制御を行うと、以下の位置制御を順に行うことによって、搬送対象物を3つ以上の搬送ローラの並び方向に搬送することができる。
【0012】
隣接して配置される3つの前記搬送ローラそれぞれの位置制御に関し、
搬送対象物を下部より支持する支持搬送ローラの位置制御である第一位置制御と、
搬送対象物が前記支持搬送ローラに当接した状態で、前記搬送対象物を、前記支持搬送ローラの上部搬送方向中央側に案内する上流側搬送ローラの位置制御である第二位置制御と、
搬送対象物が前記支持搬送ローラに当接した状態で、前記搬送対象物を、前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する下流側搬送ローラの位置制御である第三位置制御と、
を実行されると、
支持搬送ローラを基準に考えたときに、上流側搬送ローラは、前記支持搬送ローラの上流側斜め上方に相対移動し、下流側搬送ローラは、前記支持搬送ローラの下流側斜め上方に相対移動する。
【0013】
すると、位置制御される前に支持ローラの上流側斜め上方に支持された搬送対象物が、前記上流側搬送ローラに押し上げられるとともに、前記搬送対象物が、前記支持搬送ローラの上部搬送方向中央側に案内されることになる。
【0014】
ここで、前記支持搬送ローラの上部搬送方向中央側に案内された前記搬送対象物は、前記支持搬送ローラの上部中央を乗り越えて移動する。
【0015】
前記搬送対象物が前記支持搬送ローラを乗り越えるときに、前記下流側搬送ローラが、前記支持搬送ローラの下流側斜め上方に移動している。そのため、前記支持搬送ローラを乗り越えて移動した前記搬送対象物は、前記下流側搬送ローラに受け止められた状態で前記支持搬送ローラに支持された状態になる。(第一搬送動作)
【0016】
上述の位置制御の後、各搬送ローラを基準位置に復帰すると、前記搬送対象物は、下流側搬送ローラの上流側斜め上方に支持される状態になり、搬送方向下流側に案内されることになる。(第二搬送動作)
【0017】
したがって、前記搬送方向に並ぶ3つの搬送ローラの組み合わせを、前記搬送方向において逐次組み替えながら、前記3つの搬送ローラの組み合わせることにより、
前記上流側搬送ローラの前記第二位置制御と前記支持搬送ローラの前記第一位置制御により、前記搬送対象物を、前記支持搬送ローラの上部搬送方向中央側まで案内する第一搬送動作と、
前記支持搬送ローラの前記第一位置制御と前記下流側搬送ローラの前記第三位置制御とにより、前記搬送対象物を、前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する第二搬送動作と、
を実行しつつ前記搬送対象物を前記搬送方向に搬送することができるようになる。
【0018】
その結果、前記第一搬送動作から第二搬送動作に至る工程で、搬送対象物は、前記支持搬送ローラの上部において前記上流側搬送ローラと前記支持搬送ローラとの間で保持される状態から、前記支持搬送ローラと下流側搬送ローラとの間で保持される状態に受け渡されることになる。このとき、前記支持搬送ローラと前記上流側搬送ローラ、前記支持搬送ローラと前記下流側搬送ローラは近接した状態となっており、上流側搬送ローラと下流側搬送ローラとも近接しているため、搬送対象物が受け渡される際に慣性で移動する距離は少なく、受渡動作における搬送対象物に対する衝撃が加わりにくい。さらに、前記搬送対象物は、前記支持搬送ローラの上部で受け渡されるから、前記搬送対象物の移動速度も加速されにくく、さらに搬送対象物が円滑に受け渡し搬送される状態となっているといえる。
【0019】
〔構成〕
また上記構成において、前記第一位置制御が、前記支持搬送ローラが元位置に保持される位置保持制御であり、前記第二位置制御が、前記停止状態にある前記支持搬送ローラに対して、前記上流側搬送ローラが前記支持搬送ローラの上部上流側表面に沿って移動する上昇移動と、前記上昇移動前の元位置に復帰する下降移動とを実行する第二往復移動制御であり、前記第三位置制御が、前記停止状態にある前記支持搬送ローラに対して、前記下流側搬送ローラが前記支持搬送ローラの上部下流側表面に沿って移動する上昇移動と、前記上昇移動前の元位置に復帰する下降移動とを実行する第三往復移動制御であってもよい。
【0020】
〔作用効果〕
つまり、前記第一位置制御が、前記支持搬送ローラが元位置に保持される位置保持制御であれば、前記支持搬送ローラは、第一位置制御において、静止状態となる。
【0021】
このとき、前記第二位置制御が、前記停止状態にある前記支持搬送ローラに対して、前記上流側搬送ローラが前記支持搬送ローラの上部上流側表面に沿って移動する上昇移動を行うと、前記上流側搬送ローラが前記搬送対象物を前記支持搬送ローラに対し持ちあげる前記第一搬送動作を行うことができる。
【0022】
また、前記上昇移動前の元位置に復帰する下降移動を実行する第二往復移動制御を行うことにより、前記下流側搬送ローラが、前記支持搬送ローラから搬送対象物を受け取って搬送方向下流側に案内する第二搬送動作を行うことができる。
【0023】
その結果、上記、受渡動作における搬送対象物に対する衝撃が加わりにくく、搬送対象物が円滑に受け渡し搬送される状態を実現することができる。
【0024】
〔構成〕
また上記構成において、前記第一位置制御が、前記支持搬送ローラが、元位置における搬送方向の位置を維持したまま、下降移動をした後、下降前の元位置に復帰する第一往復移動制御であり、
前記第二位置制御が、前記第一往復移動制御中の前記支持搬送ローラに対して、前記上流側搬送ローラが前記支持搬送ローラの上部上流側表面に沿って移動する上昇移動と、上昇移動前の元位置に復帰する下降移動とを含む第二往復移動制御であり、
前記第三位置制御が、前記第一往復移動制御中の前記支持搬送ローラに対して、前記下流側搬送ローラが前記支持搬送ローラの上部下流側表面に沿って移動する上昇移動と、移動前の元位置に復帰する下降移動とを含む第三往復移動制御であってもよい。
【0025】
〔作用効果〕
つまり、前記第一位置制御が、前記支持搬送ローラが、元位置における搬送方向の位置を維持したまま、下降移動をした後、下降前の元位置に復帰する第一往復移動制御であれば、前記支持搬送ローラは、第一位置制御において上下移動し、前記第一搬送動作時に下降移動し、前記第二搬送動作時に上昇移動する構成とすることができる。
【0026】
このとき、前記第二位置制御が、前記第一往復移動制御中の前記支持搬送ローラに対して、前記上流側搬送ローラが前記支持搬送ローラの上部上流側表面に沿って移動する上昇移動と、上昇移動前の元位置に復帰する下降移動とを含む第二往復移動制御を行うと、前記上昇移動により前記搬送対象物に対して前記第一搬送動作を行うことができ、前記上昇移動前の元位置に復帰する下降移動を行うことにより、前記上流側搬送ローラが前記搬送対象物に対して前記第二搬送動作を行える。
【0027】
また、前記第三位置制御が、前記第一往復移動制御中の前記支持搬送ローラに対して、前記下流側搬送ローラが前記支持搬送ローラの上部下流側表面に沿って移動する上昇移動と、移動前の元位置に復帰する下降移動とを含む第三往復移動制御を行うと、前記上昇移動により、前記搬送対象物に対して前記下流側搬送ローラが前記第一搬送動作を行うことができ、前記上昇移動前の元位置に復帰する下降移動を行うことにより、前記搬送対象物に対して前記下流側搬送ローラが前記第二搬送動作を行える。
【0028】
すると、各搬送ローラが、すべて位置制御により移動しつつ、全体として少ない移動動作で搬送対象物を搬送する搬送動作が行えることになる。また、前記支持搬送ローラが下降しつつ、前記上流側搬送ローラが前記搬送対象物を押し上げるので、前記搬送対象物は、少ない上下移動(理想的には搬送対象物が水平方向に等速移動する状態)で第一搬送動作が行える。
【0029】
その結果、上記、受渡動作における搬送対象物に対してさらに衝撃が加わりにくく、搬送対象物が円滑に受け渡し搬送される状態を実現することができる。
【0030】
〔構成〕
また、前記第一位置制御が、
搬送ローラが、前記支持搬送ローラとして働き、搬送方向下流側へ下降しながら移動する支持搬送ローラ制御であり、
前記第二位置制御が、
前記搬送方向下流側へ下降しながら移動する前記支持搬送ローラに対して、搬送ローラが、前記上流側搬送ローラとして働き、前記支持搬送ローラの上部上流側表面に沿って移動する上流側搬送ローラ制御であり、
前記第三位置制御が、
前記上流側搬送ローラ動作の完了後、前記支持搬送ローラ動作の始点位置である元位置へ復帰する下流側搬送ローラ制御であってもよい。
【0031】
〔作用効果〕
つまり、前記第一位置制御が、前記搬送ローラを支持搬送ローラとして駆動させるものであり、搬送方向下流側へ下降しながら移動すると、前記搬送ローラは、前記下流側搬送ローラとして、搬送対象物を受け取った受け取り姿勢から、下流側に移動する搬送対象物を下部より支持する姿勢に位置変更することができる。
【0032】
前記第二位置制御が、前記搬送ローラを上流側搬送ローラとして駆動させるものであり、前記支持搬送ローラの上部上流側表面に沿って移動すると、前記搬送ローラは、前記搬送対象物を下部から支持する姿勢から、下流側に搬送対象物を送り出す姿勢に位置変更することができる。
【0033】
前記第三位置制御が、前記搬送ローラを下流側搬送ローラとして駆動させるものであり、上流側搬送ローラ動作の完了後、前記支持搬送ローラ動作の始点位置である元位置へ復帰する移動を行うと、前記搬送ローラは、前記搬送対象物を送り出した姿勢から、前記搬送対象物を受け取る姿勢に位置変更することができる。
【0034】
すると、前記搬送ローラは、常時位置移動しながら、前記上流側搬送ローラと支持搬送ローラとの関係で搬送対象物を搬送する第一搬送動作を実行することができるとともに、前記支持搬送ローラと前記下流側搬送ローラとの関係で第二搬送動作を行うことができる。また、この第一〜第三位置制御によると搬送ローラは搬送対象物に対する支持姿勢、送り出し姿勢、受け取り姿勢に順次移動し、常時位置移動して搬送対象物を移動させているので、高い搬送効率で搬送対象物を搬送することができる利点がある。
【0035】
その結果、上記、受渡動作における搬送対象物に対してさらに円滑に受け渡し搬送できる状態を実現することができる。
【0036】
〔構成〕
また、上記構成において、前記3つ以上の搬送ローラを搬送方向順に、(kを自然数として)
n=3k−2番目の搬送ローラを第一搬送ローラ群、
n=3k−1番目の搬送ローラを第二搬送ローラ群、
n=3k番目の搬送ローラを第三搬送ローラ群に群分けし、
前記第一搬送ローラ群、第二搬送ローラ群及び第三搬送ローラ群に対して、それぞれ別個に位置制御を行う位置制御機構を設け、
各位置制御機構が、前記第二位置制御、前記第一位置制御及び前記第三位置制御を順次実行するように構成され、
前記第一搬送ローラ群が前記第二位置制御を、前記第二搬送ローラ群が前記第一位置制御を、前記第三搬送ローラ群が前記第三位置制御を、実行する初期状態を起点として、各位置制御機構が順次、前記第二位置制御、前記第一位置制御及び前記第三位置制御を、順に繰返すように構成しても良い。
【0037】
〔作用効果〕
上記構成において前記第一〜第三位置制御を行う搬送ローラは、3個一組で搬送対象物を移動させるものであり、前記搬送方向に並ぶ3つの搬送ローラの組み合わせを、前記搬送方向において逐次組み替えながら、位置制御されることにより第一、第二搬送動作を行うから、多数の搬送ローラを三群に分け、群毎に前記第一搬送ローラ群が前記第二位置制御を、前記第二搬送ローラ群が前記第一位置制御を、前記第三搬送ローラ群が前記第三位置制御を、実行する初期状態を起点として、各位置制御機構が順次、前記第二位置制御、前記第一位置制御及び前記第三位置制御を、順に繰返すようにすると、搬送対象物は、連続的に多数の搬送ローラにわたって搬送移動させられることになる。
【0038】
〔構成〕
また、前記搬送装置を、前記搬送ローラを軸心周りに回転自在に構成するとともに、前記搬送対象物を搬送ローラの軸心と並行に接当する搬送姿勢に維持した状態で、それら搬送ローラを同じ向きに回転し、前記搬送対象物を3つ以上の搬送ローラの軸心の並び方向に回転させながら搬送可能に構成してあっても良い。
【0039】
〔作用効果〕
軸心が平行な3つ以上の搬送ローラのそれぞれに対して、管状又は棒状の搬送対象物を搬送ローラと平行に当接する搬送姿勢に維持すると、搬送対象物を下方から搬送ローラにより支持することができる。この姿勢で、それら搬送ローラを同じ向きに回転させると、搬送対象物をその軸心周りに回転させながら支持することができる。また、
この搬送ローラの位置保持或いは位置移動を含む位置制御を行うと、搬送対象物を3つ以上の搬送ローラの並び方向に搬送することができる。
【0040】
したがって、搬送対象物を効率よく搬送しつつ、しかも、搬送対象物を、その搬送対象物の軸心周りで均等に姿勢変更させることができ、前記搬送対象物を周方向に均等に加熱処理する、塗膜形成する、などの用途で有利に使用することができる搬送装置を提供することができた。
【0041】
〔構成〕
また、本発明の加熱処理装置の特徴構成は、上記搬送装置を備え、内部に加熱対象物を挿入させた管状の前記搬送対象物を回転させながら加熱域に通過させ、前記加熱対象物を回転させながら加熱処理する点にある。
【0042】
〔作用効果〕
すなわち、上記搬送装置によると、各搬送ローラは、加熱域内の比較的狭い領域で限られた位置移動を繰り返すだけで搬送対象物を円滑に搬送移動させることができるので、前記加熱域の内外を出入りして加熱、冷却の熱サイクルを受けないことになり、加熱域外に無駄な放熱が行われるという熱ロスを生じず、エネルギー節約のため効率の良い加熱処理が行える熱処理装置の搬送装置とすることができる。
【0043】
また、搬送対象物は搬送ローラに対して当接した搬送姿勢を維持することができるので、搬送ローラによる搬送対象物の回転を安定化させることができ、よって、振動等による搬送対象物の破損を抑制することができる。また、この搬送装置は搬送対象物を回転させながら搬送するため、加熱域中で搬送対象物の周方向全周に対してムラなく均一的に処理を施すことができ、各処理装置の運転に支障を来たしたりすることも抑制することができる。
【発明の効果】
【0044】
したがって、搬送対象物を安定かつ円滑に搬送できる搬送装置およびその搬送装置を備えた加熱処理装置を提供することができ、管状又は棒状の搬送対象物を加熱する熱効率を向上することができ、省エネルギー性能を高めることができた。
【図面の簡単な説明】
【0045】
【図1】第一実施形態の加熱処理装置の側面図
【図2】第一実施形態の加熱処理装置の正面図
【図3】第一実施形態の搬送装置におけるローラ駆動装置の斜視図
【図4】第一実施形態の搬送装置におけるローラ駆動装置の要部斜視図
【図5】第一実施形態の搬送装置におけるローラ駆動装置の要部斜視図
【図6】第一実施形態の搬送装置における搬送対象物の搬送動作作用説明図
【図7】第一実施形態の搬送装置の搬送動作の位置制御作用説明図
【図8】第一実施形態の搬送装置の搬送動作の位置制御作用説明図
【図9】第二実施形態の加熱処理装置の側面図
【図10】第二実施形態の加熱処理装置の正面図
【図11】第二実施形態の搬送装置におけるローラ駆動装置の斜視図
【図12】第二実施形態の搬送装置の搬送動作の位置制御作用説明図
【図13】第三実施形態の搬送装置における搬送動作の作用説明図
【図14】第四実施形態の搬送装置における搬送動作の作用説明図
【発明を実施するための形態】
【0046】
以下に、本発明の搬送装置および加熱処理装置を説明する。尚、以下に好適な実施形態を記すが、これら実施形態はそれぞれ、本発明をより具体的に例示するために記載されたものであって、本発明の趣旨を逸脱しない範囲において種々変更が可能であり、本発明は、以下の記載に限定されるものではない。
【0047】
<第一実施形態>
〔1.加熱処理装置〕
本発明の加熱処理装置は、図1〜3に示すように本発明の搬送装置Aの上方に、前記搬送装置Aの上面を形成する多数の搬送ローラ1、1、1………列に載置された管状又は棒状の搬送対象物2を加熱自在な加熱炉Bを横架姿勢で設けて構成されている。前記搬送対象物2としては、例えば、蛍光灯用ランプ管が用いられ、前記蛍光灯用ランプ管を加熱炉により加熱して蛍光膜を焼成するのに用いられる。
【0048】
〔1−1.加熱炉〕
加熱炉Bは、図2に示すように、搬送装置Aの前記多数の搬送ローラ1、1、1………列上部に形成される搬送経路Cにおいて搬送されている搬送対象物2を焼成処理するために炎口B1aが下向きのバーナーB1を、搬送経路Cにおける搬送対象物2の搬送方向及び横幅方向のそれぞれについて複数並べた状態で、搬送経路Cに沿わせて上方から垂下支持した状態で配設されており、前記搬送経路Cにおける加熱炉BのバーナーB1の下方部分を加熱域として、回転軸心が平行な3つ以上の搬送ローラ1、1、1………のそれぞれに対して、搬送対象物2としてのランプ管を搬送ローラ1、1、1………の回転軸心と平行に当接する搬送姿勢に維持した状態で、それら搬送ローラ1、1、1………を同じ向きに回転させながら通過させることで、バーナーB1により搬送経路Cに搬送されているランプ管の内面に塗布された蛍光膜用塗膜を加熱して蛍光膜を焼成する。
【0049】
〔1−2.搬送装置〕
前記搬送装置Aは、図1〜3に示すように、第一〜第三ローラ駆動装置A1〜A3がそれぞれ左右一対の基台3に固定されるとともに、前記各ローラ駆動装置間A1〜A3、A1〜A3間に横架して設けられる多数の搬送ローラ1、1、1………を備えて構成されている。前記各ローラ駆動装置A1〜A3は、前記基台3に対して前記多数の搬送ローラ1、1、1………の搬送対象物2の搬送方向(以下前後方向とする)および上下方向に変位自在に支持される架台部4を設けて、その架台部4を、前後、上下方向に揺動させる位置制御機構5を設けて構成してある。
【0050】
〔1−2−1.架台部〕
前記架台部4は、図4、5に示すように、前記基台3に前後方向に沿う面状に起立形成された立壁部31に、支持板41を、横スライダ42、縦スライダ43を介して取り付けてある。前記支持板41には、搬送ローラ1(図示する例では、理解を容易にするために3本としてある)をその軸心1x周りに回転自在に定置するローラ支持部44を設けてある。また、前記ローラ支持部44に固定した搬送ローラ1を回転駆動するためのモータ45を設け、前記モータ45の回転駆動力を前記搬送ローラ1に伝達する動力伝達機構46を、複数のギア46a、46a………およびチェーン46bで構成して前記支持板41に固定して設けてある。
【0051】
〔1−2−2.位置制御機構〕
前記位置制御機構5は、図1〜3に示すように、前記基台3、3にわたって、水平軸心51x周りに回転自在に支持される連動部材51を設け、
左右一対の基台3、3のうち一方に、前記連動部材51を回転駆動操作するシリンダ駆動部52を設け、
前記連動部材51の回転に伴って、一端部が水平揺動軸心6x周りに上下揺動される揺動部材6を、前記一端部6aにおいて前記連動部材51にリンク部材53により連結して設け、
前記揺動部材6の揺動に伴って、前後方向の縦面に沿ってスライド移動するプレート部材7を設け、前記プレート部材7を、前記架台部4の支持板41に固定することにより、前記シリンダ駆動部52の駆動力を、前記プレート部材7に支持される搬送ローラ1の搬送対象物2に対する搬送動作として伝達するように構成してある。
また、左右一対の基台3、3のうち他方についても、前記連動部材51を介して伝動されるシリンダ駆動部52の駆動力を、同期して前記搬送ローラ1に伝達するリンク部材53、揺動部材6、プレート部材7をそれぞれ設けて、隣接して配置される3つの前記搬送ローラ1、1、1それぞれに対し、各搬送ローラ1、1、1の位置保持或は位置移動を含む位置制御を行う構成とする(図2参照)。
【0052】
前記揺動部材6は、図4、5に示すように、前記基台3、3に横架支持される軸部材32の軸心を水平揺動軸心6xとして、揺動自在に設けられている。前記揺動部材6は、一端部6a側に連結された前記リンク部材53の上下動にしたがって揺動される。
【0053】
前記揺動部材6には、前記水平揺動軸心6xよりも前記一端部6aとは反対側の他端部6b側に第一接当部61を設けるとともに、前記水平揺動軸心6xを挟んで前記一端部6a側に第二接当部62を設けてある。また、前記プレート部材7には、前記軸部材32に係合する支持凹部70および前記第一、第二接当部61、62に係合する第一、第二揺動凹部71、72を設けてある。
【0054】
これにより、前記揺動部材6の一端部6aが揺動された低姿勢において(図7参照)、第一接当部61が前記第一揺動凹部71に係合して、前記軸部材32を支点として前記プレート部材7が前記第一接当部61により、搬送対象物2の搬送方向の前上方に移動させられる。すなわち、前記プレート部材7に連設される支持板41に固定された搬送ローラ1は、前記搬送ローラ1を上流側搬送ローラとして、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を回転させながら、前記支持搬送ローラの上部搬送方向中央側に案内する第二位置制御が行われる。
また、前記揺動部材6の一端部6aが揺動された高姿勢において(図8参照)、前記第二接当部62が前記第二揺動凹部72に接当して前記プレート部材7が前記第二接当部62により、搬送対象物2の搬送方向の後上方に移動させられる。すなわち、前記プレート部材7に連設される支持板41に固定された搬送ローラ1は、前記搬送ローラ1を下流側搬送ローラとして、搬送対象物2が前記支持搬送ローラに当接した状態で、回転しながら、前記支持搬送ローラの上部搬送方向中央側を乗り越えた搬送対象物を受取り、搬送方向下流側に案内する第三位置制御が行われる。
尚、前記揺動部材6の一端部6aを中央位置に維持しておけば、前記搬送ローラ1を支持搬送ローラとして、搬送対象物2を下部より支持する第一位置制御を行える。
【0055】
〔1−2−3.ローラ支持部〕
図1〜3に示すように、前記搬送装置は、前記第一〜第三ローラ駆動装置A1〜A3を前記基台3、3に備え、それぞれの前記ローラ駆動装置A1〜A3に設けられる架台部4において、前記支持板41が搬送ローラ1を支持するローラ支持部44を前記搬送対象物2を搬送する搬送方向に順次位置ずれさせて設けてある。これにより、前記搬送ローラ1は、
前記搬送ローラ1を搬送方向順に、(kを自然数とすると)
n=3k−2番目の搬送ローラ1を第一搬送ローラ群1a、
n=3k−1番目の搬送ローラ1を第二搬送ローラ群1b
n=3k番目の搬送ローラ1を第三搬送ローラ群1cに群分けすると、
前記第一搬送ローラ群1aは、第一ローラ駆動装置A1に、第二搬送ローラ群1bは、第二ローラ駆動装置A2に、第三搬送ローラ1c群は、第三ローラ駆動装置A3に支持された構成となり、これらローラ群1a〜1cに対して、それぞれ別個に位置制御を行う位置制御機構5を設けた構成となる。
【0056】
したがって、前記第一搬送ローラ群1aが前記第二位置制御を、前記第二搬送ローラ群1bが前記第一位置制御を、前記第三搬送ローラ群1cが前記第三位置制御を、実行する初期状態を起点として、各位置制御機構5が順次、前記第二往復移動制御、前記位置保持制御及び前記第三往復移動制御を、順に繰返すことができる。
【0057】
〔1−3.搬送動作〕
上記構成により、前記第一〜第三ローラ駆動装置A1〜A3を独立に駆動制御すると、隣接して配置される3つの前記搬送ローラ1、1、1それぞれの位置制御に関し、
搬送対象物2を下部より支持する支持搬送ローラと、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側に案内する上流側搬送ローラと、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する下流側搬送ローラとの関係において、
図7(a)に示すように、前記搬送ローラ1を、支持搬送ローラとして、搬送対象物2を下部より支持する位置制御である第一位置制御として、前記支持搬送ローラが元位置に保持される位置保持制御を行うことができる。
また、図7(b)に示すように、前記搬送ローラ1を上流側搬送ローラとして、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側に案内する位置制御である第二位置制御として、前記停止状態にある前記支持搬送ローラに対して、前記上流側搬送ローラが前記支持搬送ローラの上部上流側表面に沿って移動することにより、搬送対象物を前記支持搬送ローラの上部中央に向かって押しあげ乗り越えさせる上昇移動と、前記上昇移動前の元位置に復帰する下降移動とを実行する第二往復移動制御を行うことができる。
さらに、図8(b)に示すように、前記搬送ローラ1を下流側搬送ローラとして、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側を乗り越えた搬送対象物を前記支持搬送ローラから受取り、搬送方向下流側に案内する位置制御である第三位置制御として、前記停止状態にある前記支持搬送ローラに対して、前記下流側搬送ローラが前記支持搬送ローラの上部下流側表面に沿って移動する上昇移動と、前記上昇移動前の元位置に復帰する下降移動とを実行する第三往復移動制御を行うことができる。
【0058】
尚、上流側搬送ローラの移動量は、前記搬送対象物を支持搬送ローラの上部中央を乗り越えさせられるように設定してあり、具体的には、前記第二往復移動制御による上流側搬送ローラの移動量は52°に設定してある。また、下流側搬送ローラは、前記搬送対象物を支持搬送ローラの上部中央を乗り越えた姿勢から、静かに受け取ることができる位置にまで移動するように設定してあり、具体的には、前記第三往復移動制御による下流側搬送ローラの移動量は45°としてある。つまり、上流側搬送ローラの移動量を、下流側搬送ローラの移動量よりも大に設定してある。これにより、上流側搬送ローラが、前記搬送対象物を前記支持搬送ローラの上部搬送方向中央側まで案内する場合、下流側搬送ローラが前記搬送対象物を前記支持搬送ローラの上部搬送方向中央側から受取る姿勢よりも、支持搬送ローラ中央側に寄った姿勢になるので、前記搬送対象物が、前記支持搬送ローラの中央上部を乗り越えやすい動きとすることができる。
【0059】
これら第一〜第三位置制御を行うと、前記搬送対象物は、図6に示すように、各位置制御機構5が、前記第二往復移動制御、前記位置保持制御、及び前記第三往復移動制御を順次実行するように構成される。具体的には、図6においてn番目の搬送ローラを1nと表示したときに、(この表記は、特に図6、13、14の搬送動作の作用説明図のみで行う)搬送ローラ11を上流側搬送ローラとして前記第二位置制御としての前記第二往復移動制御を行い、搬送ローラ12を支持搬送ローラとして前記第一位置制御としての前記位置保持制御を行い、搬送ローラ13を下流側搬送ローラとして、前記第三位置制御としての第三往復移動制御を行う。
【0060】
すると、前記搬送対象物2は、搬送ローラ11により前記上流側搬送ローラの前記第二位置制御(第二往復移動制御)と、前記搬送ローラ12の支持搬送ローラとしての前記第一位置制御(位置保持制御)により、前記搬送ローラ12に支持された状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側まで案内する第一搬送動作が行われ、図6(a)の状態から図6(b)の状態に遷移する。同時に前記搬送ローラ12の支持搬送ローラとしての前記第一位置制御(位置保持制御)と前記搬送ローラ13の下流側搬送ローラとしての前記第三位置制御(第三往復移動制御)とにより、前記搬送対象物2は前記搬送ローラ12に支持された状態から、前記搬送ローラ13が、前記搬送対象物2を前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する第二搬送動作が行われ、図6(b)の状態から図6(c)の状態に遷移する。
【0061】
その結果、前記搬送対象物2は、前記搬送ローラ12に支持され前記搬送ローラ11により前記搬送ローラ12に沿って第一搬送動作され、前記搬送ローラ13によって第二搬送動作される姿勢から、前記搬送ローラ13に支持され、前記搬送ローラ12により前記搬送ローラ13に沿って第一搬送動作され、前記搬送ローラ14によって第二搬送動作される姿勢に変化する(図6(c)から図6(e)を行うことができる状態)。そのため、前記第二往復移動制御、前記位置保持制御及び前記第三往復移動制御を行う搬送ローラ1を順次、前進側に単位搬送ローラ毎にずらせて行うと(次に、搬送ローラ12、13、14を上流側搬送ローラ、支持搬送ローラ、下流側搬送ローラとした位置制御を行い、次に搬送ローラ13、14、15の組、搬送ローラ14、15、16の組というように順に行うと)、搬送対象物2を順次下流側の搬送ローラ1に(搬送ローラ11に対して搬送ローラ12、搬送ローラ12に対して搬送ローラ13、搬送ローラ13に対して搬送ローラ14というように)支持させる状態に搬送することができる。
【0062】
<第二実施形態>
先の実施形態では、位置制御機構5をシリンダ駆動部51により駆動される揺動部材6およびプレート部材7とを設けて構成し、前記架台部4が前記揺動部材6により揺動され位置制御されるものとしたが、揺動部材6の揺動に代えてカム8の運動により前記架台部を位置制御する構成とすることもできる。
以下にカムを用いた位置制御機構5を説明する。尚、前の第一実施形態と同様の構成については、同一符号を付して詳細な説明を省略してある。
【0063】
〔2.搬送装置〕
前記搬送装置Aは、図9〜11に示すように、第一〜第三ローラ駆動装置A1〜A3がそれぞれ左右一対の基台3に固定されるとともに、前記各ローラ駆動装置間A1〜A3、A1〜A3間に横架して設けられる多数の搬送ローラ1、1、1………を備えて構成されている。前記各ローラ駆動装置A1〜A3は、前後および上下方向に変位自在に支持される架台部4を設け、前記架台部4に対する位置制御機構5を設けて構成してある。
【0064】
〔2−1.架台部〕
前記架台部4は、図9〜11に示すように、基台3に対し、横スライダ42を介して前後スライド移動自在にプレート部材73を取り付けて設けるとともに、前記プレート部材73に台部74を設け、縦スライダ43を介して前記支持板41上下スライド移動自在に連設してある。前記支持板41には、搬送ローラ1(本実施形態では17本)のローラ支持部44を設けてある。また、搬送ローラ1を回転駆動するためのモータ45を設け、前記モータ45の回転駆動力を前記搬送ローラ1に伝達するギア46aおよびチェーン46bからなる動力伝達機構46を前記支持板41に固定してある。
【0065】
〔2−2.位置制御機構〕
前記位置制御機構5は、図9〜11に示すように、前記基台3、3にわたって、水平軸心周りに回転自在に支持される連動部材51を設け、前記連動部材を、その軸心周りに回転駆動するモータ54を設けてある。前記連動部材51における前記基台下方には、各ローラ駆動装置A1〜A3毎に2枚一対のカム8を設け、前記モータ54により前記連動部材51の回転に伴って軸心周りに回転駆動自在に構成してある。
【0066】
前記カム8は前記架台部4を上下に揺動させるための第一カム81と、前後に揺動させるための第二カム82とを備えてなり、前記第一、第二カム81、82にはそれぞれ第一、第二カムフォロワ81a、82aを設ける。前記第一カムフォロワ81aには、前記第一カムフォロワ81aの移動に追従して一端部91aが水平軸心81x周りに上下揺動される上下揺動アーム91を設けるとともに、前記上下揺動アームの他端部91bを前記支持板41に連設してある。前記第二カムフォロワ82aには、一端部92aが水平軸心82x周りに前後揺動される前後揺動アーム92を設け、前記前後揺動アーム92の他端部92bを前記プレート部材73に連設してある。
【0067】
また、左右一対の基台3のうち他方についても、前記連動部材51を介して伝動されるモータ54の駆動力を、同期して前記搬送ローラ1に伝達するカム8、上下、前後揺動アーム91、92、プレート部材74をそれぞれ設けて、前記搬送ローラ1の位置制御を行う構成とする(図9、10参照)。
【0068】
また、前記第一〜第三ローラ駆動装置には、それぞれ、図12に示す第一、第二カムを120°位相をずらせた状態で設けられている。
【0069】
これにより、前記モータ54が駆動されると、前記第一、第二カムが回転することにより前記カムフォロワが図12のように揺動し、図12(a)の姿勢から前記図12(b)の姿勢に移動すると、前記第一カムフォロワ81aが前記上下揺動アーム91を前方側動かすために、前記支持板41が上方に動く。一方第二カムフォロワ82aが、前記前後揺動アーム92を後方に動かすために、前記プレート部材73が前記支持板41とともに前方に動く。その結果、前記支持板41に設けられた搬送ローラ1は上流側搬送ローラとして、支持搬送ローラとしての上部上流側表面に沿って移動する上昇移動する。
次に、図12(b)の姿勢から前記図12(c)の姿勢に移動すると、前記第一カムフォロワ81aが前記上下揺動アーム91を下方に動かすために、前記支持板41が下方に動く。一方第二カムフォロワ82aが、前記前後揺動アーム92を前方に動かすために、前記プレート部材73が前記支持板41とともに後方に動く。その結果、前記支持板41に設けられた搬送ローラ1は上昇移動前の元位置に復帰する。
この動作を、順次行うと、図12(a)から図12(c)のように、前記搬送ローラ1を上流側搬送ローラとして、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側に案内する第二位置制御を行い、図12(c)から図12(e)ののように、前記搬送ローラ1を下流側搬送ローラとして、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する第三位置制御を行えることになる。また、図12(e)から図12(f)に至り図12(a)に戻る静止した状態が、前記搬送ローラ1を支持ローラとして搬送対象物2を下部より支持する第一位置制御に該当する。
【0070】
〔2−3.ローラ支持部〕
図9〜11に示すように、前記搬送装置は、前記第一〜第三ローラ駆動装置A1〜A3を前記基台3に備え、それぞれの前記ローラ駆動装置A1〜A3に設けられる架台部4において、前記支持板41が搬送ローラ1を支持するローラ支持部44を前記搬送対象物2を搬送する搬送方向に順次位置ずれさせて設けてある。これにより、前記搬送ローラ1は、
前記搬送ローラ1を搬送方向順に、(kを自然数とすると)
n=3k−2番目の搬送ローラ1を第一搬送ローラ群1a、
n=3k−1番目の搬送ローラ1を第二搬送ローラ群1b、
n=3k番目の搬送ローラ1を第三搬送ローラ群1cに群分けすると、
前記第一搬送ローラ群1aは、第一ローラ駆動装置A1に、第二搬送ローラ群1bは、第二ローラ駆動装置A2に、第三搬送ローラ群1cは、第三ローラ駆動装置A3に支持された構成となり、これらローラ群1a〜1cに対して、それぞれ別個に位置制御を行う位置制御機構5を設けた構成となる。
【0071】
したがって、前記第一搬送ローラ群1aが前記第二位置制御を、前記第二搬送ローラ群1bが前記第一位置制御を、前記第三搬送ローラ群1cが前記第三位置制御を、実行する初期状態を起点として、各位置制御機構5が順次、前記第二位置制御、前記第一位置制御及び前記第三位置制御を、順に繰返すことができる。
【0072】
〔2−4.搬送動作〕
上記構成により、前記第一〜第三ローラ駆動装置A1〜A3を独立に駆動制御すると、隣接して配置される3つの前記搬送ローラ1、1、1それぞれの位置制御に関し、
搬送対象物2を下部より支持する支持搬送ローラと、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側に案内する上流側搬送ローラと、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する下流側搬送ローラとの関係において、
図12(a)〜図12(c)に示すように、前記搬送ローラ1を上流側搬送ローラとして、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側に案内する位置制御である第二位置制御として、前記停止状態にある前記支持搬送ローラに対して、前記上流側搬送ローラが前記支持搬送ローラの上部上流側表面に沿って移動する上昇移動(図12(a)〜図12(b))と、前記上昇移動前の元位置に復帰する下降移動(図12(b)〜図12(c))とを実行する第二往復移動制御を行うことができる。
尚、図12においては、第一搬送ローラ群1aの位置制御のみを、具体的に示している。
【0073】
また、図12(c)〜図12(e)に示すように、前記搬送ローラ1を下流側搬送ローラとして、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する位置制御である第三位置制御として、前記停止状態にある前記支持搬送ローラに対して、前記下流側搬送ローラが前記支持搬送ローラの上部下流側表面に沿って移動する上昇移動(図12(c)〜図12(d))と、前記上昇移動前の元位置に復帰する下降移動とを実行する第三往復移動制御を行うことができる。
【0074】
さらに、図12(e)〜図12(f)の動きに続いて、図12(a)に戻る位地制御により、前記搬送ローラ1を、支持搬送ローラとして、搬送対象物2を下部より支持する位置制御である第一位置制御として、前記支持搬送ローラが元位置に保持される位置保持制御を行うことができる。
【0075】
これら第一〜第三位置制御を行うと、前記搬送対象物2は、図6に示すように、各位置制御機構5が、前記第二往復移動制御、前記第一往復移動制御及び前記第三往復移動制御を順次実行するように構成される。具体的には、図6においてn番目の搬送ローラを1nと表示したときに、搬送ローラ11を上流側搬送ローラとして前記第二位置制御としての前記第二往復移動制御を行い、搬送ローラ12を支持搬送ローラとして前記第一位置制御としての前記位置保持制御を行い、搬送ローラ13を下流側搬送ローラとして、前記第三位置制御としての第三往復移動制御を行う。
【0076】
すると、前記搬送対象物2は、搬送ローラ11により前記上流側搬送ローラの前記第二位置制御(第二往復移動制御)と、前記搬送ローラ12の支持搬送ローラとしての前記第一位置制御(位置保持制御)により、前記搬送ローラ12に支持された状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側まで案内する第一搬送動作が行われ、図6(a)の状態から図6(b)の状態に遷移する。同時に前記搬送ローラ12の支持搬送ローラとしての前記第一位置制御(位置保持制御)と前記搬送ローラ13の下流側搬送ローラとしての前記第三位置制御(第三往復移動制御)とにより、前記搬送対象物2は前記搬送ローラ12に支持された状態から、前記搬送ローラ13が、前記搬送対象物2を前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する第二搬送動作が行われ、図6(b)の状態から図6(c)の状態に遷移する。
【0077】
その結果、前記搬送対象物2は、前記搬送ローラ12に支持され前記搬送ローラ11により前記搬送ローラ12に沿って第一搬送動作され、前記搬送ローラ13によって第二搬送動作される姿勢から、前記搬送ローラ13に支持され、前記搬送ローラ12により前記搬送ローラ13に沿って第一搬送動作され、前記搬送ローラ14によって第二搬送動作される姿勢に変化する(図6(c)から図6(e)を行うことができる状態)。そのため、前記第二往復移動制御、前記位置保持制御及び前記第三往復移動制御を行う搬送ローラ1を順次ずらせて行うと(次に、搬送ローラ12、13、14を上流側搬送ローラ、支持搬送ローラ、下流側搬送ローラとした位置制御を行い、次に搬送ローラ13、14、15の組、搬送ローラ14、15、16の組というように順に行うと)、搬送対象物2を順次下流側の搬送ローラ1に(搬送ローラ11に対して搬送ローラ12、搬送ローラ12に対して搬送ローラ13、搬送ローラ13に対して搬送ローラ14というように)支持させる状態に搬送することができる。
【0078】
<第三実施形態>
第二実施形態における位置制御機構5のカムの形状を変更することによって、前記搬送対象物2の搬送動作をより円滑に動作させることもできる。
以下にカムを用いた位置制御機構5を説明する。尚、前の第二実施形態と同様の構成については、同一符号を付して詳細な説明を省略してある。
【0079】
〔3.搬送動作〕
前記第一〜第三ローラ駆動装置A1〜A3を独立に駆動制御すると、隣接して配置される3つの前記搬送ローラ1、1、1それぞれの位置制御に関し、
搬送対象物2を下部より支持する支持搬送ローラと、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側に案内する上流側搬送ローラと、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する下流側搬送ローラとの関係において、
まず、前記第一位置制御として、前記支持搬送ローラが、元位置における搬送方向の位置を維持したまま、下降移動をした後、下降前の元位置に復帰する第一往復移動制御を実行可能に構成してある。具体的には、図13においてn番目の搬送ローラを1nと表示したときに、搬送ローラ12が、図13(a)〜図13(c)にわたって行う位置制御である。
【0080】
次に、第二位置制御として、前記第一往復移動制御中の前記支持搬送ローラに対して、前記上流側搬送ローラが前記支持搬送ローラの上部上流側表面に沿って移動する上昇移動と、上昇移動前の元位置に復帰する下降移動とを含む第二往復移動制御を実行可能に構成してある。具体的には、搬送ローラ12が図13(c)〜図13(e)にわたって行う位置制御である。
【0081】
さらに、第三位置制御として、前記第一往復移動制御中の前記支持搬送ローラに対して、前記下流側搬送ローラが前記支持搬送ローラの上部下流側表面に沿って移動する上昇移動と、移動前の元位置に復帰する下降移動とを含む第三往復移動制御を実行可能に構成してある。具体的には、搬送ローラ12が図13(e)〜図13(f)にわたって動作した後、図13(a)に復帰する位置制御である。
【0082】
これら第一〜第三位置制御を行うと、前記搬送対象物2は、図13に示すように、各位置制御機構5が、前記第二往復移動制御、前記第一往復移動制御及び前記第三往復移動制御を順次実行するように構成される。具体的には、搬送ローラ11を上流側搬送ローラとして前記第二位置制御としての前記第二往復移動制御を行い、搬送ローラ12を支持搬送ローラとして前記第一位置制御としての前記第一往復移動制御を行い、搬送ローラ13を下流側搬送ローラとして、前記第三位置制御としての第三往復移動制御を行う。
【0083】
すると、前記搬送対象物2は、搬送ローラ11により前記上流側搬送ローラの前記第二位置制御(第二往復移動制御)と、前記搬送ローラ12の支持搬送ローラとしての前記第一位置制御(第一往復移動制御)により、前記搬送ローラ12に支持された状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側まで案内する第一搬送動作が行われ、図13(a)の状態から図13(b)の状態に遷移する。同時に前記搬送ローラ12の支持搬送ローラとしての前記第一位置制御(第一往復移動制御)と前記搬送ローラ13の下流側搬送ローラとしての前記第三位置制御(第三往復移動制御)とにより、前記搬送対象物2は前記搬送ローラ12に支持された状態から、前記搬送ローラ13が、前記搬送対象物2を前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する第二搬送動作が行われ、図13(b)の状態から図13(c)の状態に遷移する。
【0084】
その結果、前記搬送対象物2は、前記搬送ローラ12に支持され前記搬送ローラ11により前記搬送ローラ12に沿って第一搬送動作され、前記搬送ローラ13によって第二搬送動作される姿勢から、前記搬送ローラ13に支持され、前記搬送ローラ12により前記搬送ローラ13に沿って第一搬送動作され、前記搬送ローラ14によって第二搬送動作される姿勢に変化する(図13(c)から図13(e)を行うことができる状態)。そのため、前記第二往復移動制御、前記位置保持制御及び前記第三往復移動制御を行う搬送ローラ1を順次ずらせて行うと(次に、搬送ローラ12、13、14を上流側搬送ローラ、支持搬送ローラ、下流側搬送ローラとした位置制御を行い、次に搬送ローラ13、14、15の組、搬送ローラ14、15、16の組というように順に行うと)、搬送対象物2を順次下流側の搬送ローラ1に(搬送ローラ11に対して搬送ローラ12、搬送ローラ12に対して搬送ローラ13、搬送ローラ13に対して搬送ローラ14というように)支持させる状態に搬送することができる。
【0085】
すると、図13に示すように、搬送対象物2に対する上流側搬送ローラ、支持搬送ローラ、下流側搬送ローラが、すべて位置制御により移動しつつ、全体として少ない移動動作で搬送対象物2を搬送する搬送動作が行える。また、前記支持搬送ローラが下降しつつ、前記上流側搬送ローラが前記搬送対象物2を押し上げるので、前記搬送対象物2は、ほぼ水平移動する状態で第一搬送動作が行える。
【0086】
その結果、上記、受渡動作における搬送対象物2に対してさらに衝撃が加わりにくく、搬送対象物2が円滑に受け渡し搬送される状態を実現することができる。
【0087】
<第四実施形態>
第二実施形態における位置制御機構5のカムの形状を変更することによって、前記搬送対象物2の搬送動作をさらに異なる形態に動作させることもできる。
【0088】
〔4.搬送動作〕
前記第一〜第三ローラ駆動装置A1〜A3を独立に駆動制御して、隣接して配置される3つの前記搬送ローラ1、1、1それぞれの位置制御に関し、
搬送対象物2を下部より支持する支持搬送ローラと、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側に案内する上流側搬送ローラと、搬送対象物2が前記支持搬送ローラに当接した状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する下流側搬送ローラとの関係において、
まず、前記第一位置制御として、前記支持搬送ローラとして働き、搬送方向下流側へ下降しながら移動する支持搬送ローラ制御を実行可能に構成してある。具体的には、図14においてn番目の搬送ローラを1nと表示したときに、搬送ローラ12が、図14(a)から図14(b)の中間状態を経て図14(c)まで行う位置制御である。
【0089】
次に、第二位置制御として、前記搬送方向下流側へ下降しながら移動する前記支持搬送ローラに対して、搬送ローラが、前記上流側搬送ローラとして働き、前記支持搬送ローラの上部上流側表面に沿って移動する上流側搬送ローラ制御を実行可能に構成してある。具体的には、搬送ローラ12が図14(c)から図14(d)の中間状態を経て図14(e)まで行う位置制御である。
【0090】
さらに、第三位置制御として、前記上流側搬送ローラ動作の完了後、前記支持搬送ローラ動作の始点位置である元位置へ復帰する下流側搬送ローラ制御を実行可能に構成してある。具体的には、搬送ローラ12が図14(e)から図14(f)の中間状態を経て図14(a)に戻る位置制御である。
【0091】
これら第一〜第三位置制御を行うと、前記搬送対象物2は、図14に示すように、各位置制御機構5が、前記上流側搬送ローラ制御、前記支持搬送ローラ制御及び前記下流側搬送ローラ制御を順次実行するように構成される。具体的には、搬送ローラ11を上流側搬送ローラとして前記第二位置制御としての前記上流側搬送ローラ制御を行い、搬送ローラ12を支持搬送ローラとして前記第一位置制御としての前記支持搬送ローラ制御を行い、搬送ローラ13を下流側搬送ローラとして、前記第三位置制御としての下流側搬送ローラ制御を行う。
【0092】
すると、前記搬送対象物2は、搬送ローラ11により前記上流側搬送ローラの前記第二位置制御(上流側搬送ローラ制御)と、前記搬送ローラ12の支持搬送ローラとしての前記第一位置制御(支持搬送ローラ制御)により、前記搬送ローラ12に支持された状態で、前記搬送対象物2を、前記支持搬送ローラの上部搬送方向中央側まで案内する第一搬送動作が行われる。同時に前記搬送ローラ12の支持搬送ローラとしての前記第一位置制御(支持搬送ローラ制御)と前記搬送ローラ13の下流側搬送ローラとしての前記第三位置制御(下流側搬送ローラ制御)とにより、前記搬送対象物2は前記搬送ローラ12に支持された状態から、前記搬送ローラ13が、前記搬送対象物2を前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する第二搬送動作が行われ、図14(a)の状態から図14(c)の状態に遷移する。
【0093】
その結果、前記搬送対象物2は、前記搬送ローラ12に支持され前記搬送ローラ11により前記搬送ローラ12に沿って第一搬送動作され、前記搬送ローラ13によって第二搬送動作される姿勢から、前記搬送ローラ13に支持され、前記搬送ローラ12により前記搬送ローラ13に沿って第一搬送動作され、前記搬送ローラ14によって第二搬送動作される姿勢に変化する(図14(c)から図14(e)の動作を行うことができる状態)。そのため、前記第二往復移動制御、前記位置保持制御及び前記第三往復移動制御を行う搬送ローラ1を順次ずらせて行うと(次に、搬送ローラ12、13、14を上流側搬送ローラ、支持搬送ローラ、下流側搬送ローラとした位置制御を行い、次に搬送ローラ13、14、15の組、搬送ローラ14、15、16の組というように順に行うと)、搬送対象物2を順次下流側の搬送ローラ1に(搬送ローラ11に対して搬送ローラ12、搬送ローラ12に対して搬送ローラ13、搬送ローラ13に対して搬送ローラ14というように)支持させる状態に搬送することができる。
【0094】
すると、図14に示すように、搬送対象物2に対する上流側搬送ローラ、支持搬送ローラ、下流側搬送ローラが、すべて位置制御により移動しつつ、全体として少ない移動動作で搬送対象物2を搬送する搬送動作が行える。また、前記支持搬送ローラが下降しつつ、前記上流側搬送ローラが前記搬送対象物2を押し上げるので、前記搬送対象物2は、ほぼ水平移動する状態で第一搬送動作が行える。
【0095】
その結果、上記、受渡動作における搬送対象物2に対してさらに衝撃が加わりにくく、搬送対象物2が円滑に受け渡し搬送される状態を実現することができる。また、第四実施形態によると、搬送ローラがほぼ三角形をなすように無駄なく動くので(図14)、前記第三実施形態では、6ステップで搬送対象物を3ピッチ(搬送ローラ3本分)搬送させるのに対し、前記第四実施形態では、3ステップで3ピッチ搬送させることができるようになり、効率の良い搬送が可能となった。
【0096】
尚、上述の第一〜第四実施形態は、加熱処理装置としての実施形態を示したので、搬送ローラを回転させつつ搬送対象物を搬送し、均一に加熱自在な構成としたが、均一に加熱するなど、特段の必要が搬送ローラを回転することなく(搬送対象物を回転させずに)、搬送動作を行うこともできる。
【産業上の利用可能性】
【0097】
本発明の搬送装置は、種々の管状又は棒状の搬送対象物2を円滑に搬送することができるので、易破損物搬送用の搬送装置として好適に適用することができる。また、本発明の加熱処理装置は、種々の管状又は棒状の搬送対象物2を円滑に搬送しつつ加熱することができ、熱効率も高いので、ランプ管の蛍光膜の焼成等易破損物を搬送しつつ均一に加熱処理する場合に好適に使用することができる。これにより、搬送対象物を安定かつ円滑に搬送できる搬送装置およびその搬送装置を提供することができ、管状又は棒状の搬送対象物を加熱する場合に、加熱と冷却のサイクルを繰り返すことが大きな熱ロスを生じる事がなく、省エネルギー性能を高めることができる加熱処理装置として用いることができる。
【符号の説明】
【0098】
A 搬送装置
A1〜A3 第一〜第三ローラ駆動装置
B 加熱炉
B1 バーナー
B1a 炎口
C 搬送経路
1(11〜16)搬送ローラ
1x 軸心
2 搬送対象物
3 基台
31 立壁部
32 軸部材
4 架台部
41 支持板
42 横スライダ
43 縦スライダ
44 ローラ支持部
45 モータ
46 動力伝達機構
46a ギア
46b チェーン
5 位置制御機構
51 連動部材
51x 軸心
52 シリンダ駆動部
53 リンク部材
54 モータ
6 揺動部材
6a 一端部
6b 他端部
6x 水平揺動軸心
61 第一接当部
62 第二接当部
7 プレート部材
70 支持凹部
71 第一揺動凹部
72 第二揺動凹部
73 プレート部材
74 台部
8 カム
81 第一カム
81a 第一カムフォロワ
81x 水平軸心
82 第二カム
82a 第二カムフォロワ
82x 水平軸心
91 上下揺動アーム
91a 一端部
91b 他端部
92 前後揺動アーム
92a 一端部
92b 他端部
【特許請求の範囲】
【請求項1】
軸心が平行な3つ以上の搬送ローラのそれぞれに対して、管状又は棒状の搬送対象物を搬送ローラと平行に当接する搬送姿勢に維持した状態で、搬送対象物を3つ以上の搬送ローラの並び方向に搬送する搬送装置であって、
隣接して配置される3つの前記搬送ローラそれぞれの位置制御に関し、
搬送対象物を下部より支持する支持搬送ローラの位置制御である第一位置制御と、
搬送対象物が前記支持搬送ローラに当接した状態で、前記搬送対象物を、前記支持搬送ローラの上部搬送方向中央側に案内する上流側搬送ローラの位置制御である第二位置制御と、
搬送対象物が前記支持搬送ローラに当接した状態で、前記搬送対象物を、前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する下流側搬送ローラの位置制御である第三位置制御と、
を実行可能に構成され、
前記搬送方向に並ぶ3つの搬送ローラの組み合わせを、前記搬送方向において逐次組み替えながら、前記3つの搬送ローラの組み合わせ内で、
前記上流側搬送ローラの前記第二位置制御と前記支持搬送ローラの前記第一位置制御により、前記搬送対象物を、前記支持搬送ローラの上部搬送方向中央側まで案内する第一搬送動作と、
前記支持搬送ローラの前記第一位置制御と前記下流側搬送ローラの前記第三位置制御とにより、前記搬送対象物を、前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する第二搬送動作とを実行し、
前記搬送対象物を前記搬送方向に搬送する搬送装置。
【請求項2】
前記第一位置制御が、前記支持搬送ローラが元位置に保持される位置保持制御であり、
前記第二位置制御が、前記停止状態にある前記支持搬送ローラに対して、前記上流側搬送ローラが前記支持搬送ローラの上部上流側表面に沿って移動する上昇移動と、前記上昇移動前の元位置に復帰する下降移動とを実行する第二往復移動制御であり、
前記第三位置制御が、前記停止状態にある前記支持搬送ローラに対して、前記下流側搬送ローラが前記支持搬送ローラの上部下流側表面に沿って移動する上昇移動と、前記下降移動前の元位置に復帰する上昇移動とを実行する第三往復移動制御である請求項1記載の搬送装置。
【請求項3】
前記第一位置制御が、前記支持搬送ローラが、元位置における搬送方向の位置を維持したまま、下降移動をした後、下降前の元位置に復帰する第一往復移動制御であり、
前記第二位置制御が、前記第一往復移動制御中の前記支持搬送ローラに対して、前記上流側搬送ローラが前記支持搬送ローラの上部上流側表面に沿って移動する上昇移動と、上昇移動前の元位置に復帰する下降移動とを含む第二往復移動制御であり、
前記第三位置制御が、前記第一往復移動制御中の前記支持搬送ローラに対して、前記下流側搬送ローラが前記支持搬送ローラの上部下流側表面に沿って移動する下降移動と、移動前の元位置に復帰する上昇移動とを含む第三往復移動制御である請求項1記載の搬送装置。
【請求項4】
前記第一位置制御が、
搬送ローラが、前記支持搬送ローラとして働き、搬送方向下流側へ下降しながら移動する支持搬送ローラ制御であり、
前記第二位置制御が、
前記搬送方向下流側へ下降しながら移動する前記支持搬送ローラに対して、搬送ローラが、前記上流側搬送ローラとして働き、前記支持搬送ローラの上部上流側表面に沿って移動する上流側搬送ローラ制御であり、
前記第三位置制御が、
前記上流側搬送ローラ動作の完了後、前記支持搬送ローラ動作の始点位置である元位置へ復帰する下流側搬送ローラ制御である請求項1記載の搬送装置。
【請求項5】
前記3つ以上の搬送ローラを搬送方向順に、(kを自然数として)
n=3k−2番目の搬送ローラを第一搬送ローラ群、
n=3k−1番目の搬送ローラを第二搬送ローラ群、
n=3k番目の搬送ローラを第三搬送ローラ群に群分けし、
前記第一搬送ローラ群、第二搬送ローラ群及び第三搬送ローラ群に対して、それぞれ別個に位置制御を行う位置制御機構を設け、
各位置制御機構が、前記第二位置制御、前記第一位置制御及び前記第三位置制御を順次実行するように構成され、
前記第一搬送ローラ群が前記第二位置制御を、前記第二搬送ローラ群が前記第一位置制御を、前記第三搬送ローラ群が前記第三位置制御を、実行する初期状態を起点として、各位置制御機構が順次、前記第二位置制御、前記第一位置制御及び前記第三位置制御を、順に繰返すように構成されている請求項1〜4のいずれか一項記載の搬送装置。
【請求項6】
前記搬送装置を、前記搬送ローラを軸心周りに回転自在に構成するとともに、前記搬送対象物を搬送ローラの軸心と並行に接当する搬送姿勢に維持した状態で、それら搬送ローラを同じ向きに回転し、前記搬送対象物を3つ以上の搬送ローラの軸心の並び方向に回転させながら搬送可能に構成してある請求項1〜5のいずれか一項記載の搬送装置。
【請求項7】
請求項6に記載の搬送装置を備え、
内部に加熱対象物を挿入させた管状の前記搬送対象物を回転させながら加熱域に通過させ、前記加熱対象物を回転させながら加熱処理する加熱処理装置。
【請求項1】
軸心が平行な3つ以上の搬送ローラのそれぞれに対して、管状又は棒状の搬送対象物を搬送ローラと平行に当接する搬送姿勢に維持した状態で、搬送対象物を3つ以上の搬送ローラの並び方向に搬送する搬送装置であって、
隣接して配置される3つの前記搬送ローラそれぞれの位置制御に関し、
搬送対象物を下部より支持する支持搬送ローラの位置制御である第一位置制御と、
搬送対象物が前記支持搬送ローラに当接した状態で、前記搬送対象物を、前記支持搬送ローラの上部搬送方向中央側に案内する上流側搬送ローラの位置制御である第二位置制御と、
搬送対象物が前記支持搬送ローラに当接した状態で、前記搬送対象物を、前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する下流側搬送ローラの位置制御である第三位置制御と、
を実行可能に構成され、
前記搬送方向に並ぶ3つの搬送ローラの組み合わせを、前記搬送方向において逐次組み替えながら、前記3つの搬送ローラの組み合わせ内で、
前記上流側搬送ローラの前記第二位置制御と前記支持搬送ローラの前記第一位置制御により、前記搬送対象物を、前記支持搬送ローラの上部搬送方向中央側まで案内する第一搬送動作と、
前記支持搬送ローラの前記第一位置制御と前記下流側搬送ローラの前記第三位置制御とにより、前記搬送対象物を、前記支持搬送ローラの上部搬送方向中央側から受取り、搬送方向下流側に案内する第二搬送動作とを実行し、
前記搬送対象物を前記搬送方向に搬送する搬送装置。
【請求項2】
前記第一位置制御が、前記支持搬送ローラが元位置に保持される位置保持制御であり、
前記第二位置制御が、前記停止状態にある前記支持搬送ローラに対して、前記上流側搬送ローラが前記支持搬送ローラの上部上流側表面に沿って移動する上昇移動と、前記上昇移動前の元位置に復帰する下降移動とを実行する第二往復移動制御であり、
前記第三位置制御が、前記停止状態にある前記支持搬送ローラに対して、前記下流側搬送ローラが前記支持搬送ローラの上部下流側表面に沿って移動する上昇移動と、前記下降移動前の元位置に復帰する上昇移動とを実行する第三往復移動制御である請求項1記載の搬送装置。
【請求項3】
前記第一位置制御が、前記支持搬送ローラが、元位置における搬送方向の位置を維持したまま、下降移動をした後、下降前の元位置に復帰する第一往復移動制御であり、
前記第二位置制御が、前記第一往復移動制御中の前記支持搬送ローラに対して、前記上流側搬送ローラが前記支持搬送ローラの上部上流側表面に沿って移動する上昇移動と、上昇移動前の元位置に復帰する下降移動とを含む第二往復移動制御であり、
前記第三位置制御が、前記第一往復移動制御中の前記支持搬送ローラに対して、前記下流側搬送ローラが前記支持搬送ローラの上部下流側表面に沿って移動する下降移動と、移動前の元位置に復帰する上昇移動とを含む第三往復移動制御である請求項1記載の搬送装置。
【請求項4】
前記第一位置制御が、
搬送ローラが、前記支持搬送ローラとして働き、搬送方向下流側へ下降しながら移動する支持搬送ローラ制御であり、
前記第二位置制御が、
前記搬送方向下流側へ下降しながら移動する前記支持搬送ローラに対して、搬送ローラが、前記上流側搬送ローラとして働き、前記支持搬送ローラの上部上流側表面に沿って移動する上流側搬送ローラ制御であり、
前記第三位置制御が、
前記上流側搬送ローラ動作の完了後、前記支持搬送ローラ動作の始点位置である元位置へ復帰する下流側搬送ローラ制御である請求項1記載の搬送装置。
【請求項5】
前記3つ以上の搬送ローラを搬送方向順に、(kを自然数として)
n=3k−2番目の搬送ローラを第一搬送ローラ群、
n=3k−1番目の搬送ローラを第二搬送ローラ群、
n=3k番目の搬送ローラを第三搬送ローラ群に群分けし、
前記第一搬送ローラ群、第二搬送ローラ群及び第三搬送ローラ群に対して、それぞれ別個に位置制御を行う位置制御機構を設け、
各位置制御機構が、前記第二位置制御、前記第一位置制御及び前記第三位置制御を順次実行するように構成され、
前記第一搬送ローラ群が前記第二位置制御を、前記第二搬送ローラ群が前記第一位置制御を、前記第三搬送ローラ群が前記第三位置制御を、実行する初期状態を起点として、各位置制御機構が順次、前記第二位置制御、前記第一位置制御及び前記第三位置制御を、順に繰返すように構成されている請求項1〜4のいずれか一項記載の搬送装置。
【請求項6】
前記搬送装置を、前記搬送ローラを軸心周りに回転自在に構成するとともに、前記搬送対象物を搬送ローラの軸心と並行に接当する搬送姿勢に維持した状態で、それら搬送ローラを同じ向きに回転し、前記搬送対象物を3つ以上の搬送ローラの軸心の並び方向に回転させながら搬送可能に構成してある請求項1〜5のいずれか一項記載の搬送装置。
【請求項7】
請求項6に記載の搬送装置を備え、
内部に加熱対象物を挿入させた管状の前記搬送対象物を回転させながら加熱域に通過させ、前記加熱対象物を回転させながら加熱処理する加熱処理装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−20802(P2012−20802A)
【公開日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願番号】特願2010−157700(P2010−157700)
【出願日】平成22年7月12日(2010.7.12)
【出願人】(593192885)株式会社成田製作所 (2)
【Fターム(参考)】
【公開日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願日】平成22年7月12日(2010.7.12)
【出願人】(593192885)株式会社成田製作所 (2)
【Fターム(参考)】
[ Back to top ]