
搬送装置及び計量装置
【課題】ベース部材の振動による影響を考慮しつつ、搬送期間開始時にはトラフの振動の成長を促進し、搬送期間終了時にはトラフの振動の減衰を促進し得る搬送装置を得る。
【解決手段】ベース部材22上に変位センサ51が配設されており、変位センサ51によって検出された相対変位x2−x1に基づくフィードバック制御が行われる。具体的には、変位センサ51によって検出された相対変位x2−x1から求めたトラフ8の振動速度(相対速度x2’−x1’)にフィードバックゲインKVを乗じたものが、帰還値としてフィードバックされ、その帰還値に基づいて加振パルス及び制振パルスが設定される。
【解決手段】ベース部材22上に変位センサ51が配設されており、変位センサ51によって検出された相対変位x2−x1に基づくフィードバック制御が行われる。具体的には、変位センサ51によって検出された相対変位x2−x1から求めたトラフ8の振動速度(相対速度x2’−x1’)にフィードバックゲインKVを乗じたものが、帰還値としてフィードバックされ、その帰還値に基づいて加振パルス及び制振パルスが設定される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、搬送装置及び計量装置に関し、特に、電磁石で間欠的に発生させた電磁力によりトラフを振動させて物品を搬送する電磁フィーダ、及びそれを備えた計量装置に関する。
【背景技術】
【0002】
計量装置は、供給された物品を計量ホッパへ移送するための電磁フィーダを備えて構成されている。電磁フィーダは、コイルスプリングを介して機台上に配設されたベース部材と、前後一対の板バネを介してベース部材上に取り付けられたトラフと、ベース部材上に設置された電磁石と、電磁石に間欠的に通電する通電制御手段とを有している。そして、電磁石で電磁力を間欠的に発生させて、その発生時に板バネを撓ませながらトラフを一方に変位させ、また、その非発生時にバネ体の弾性復元力によってトラフを他方に変位させることにより、トラフを振動させてトラフ上の物品を所定方向へ移送する。
【0003】
この種の電磁フィーダが複数設けられた例えば組合せ計量装置等において計量精度の向上を図るためには、電磁フィーダから計量ホッパへの物品供給量の精度を向上させる必要がある。ここで、搬送期間の終了時に電磁石への通電を停止しただけでは、トラフの振幅は自然減衰するだけであるから、しばらくの間振動が継続して物品が搬送され続けることとなる。つまり、物品の実質的な供給期間が長くなって、物品供給量が目標量より多くなる。これを防止するためには、搬送期間の終了時にトラフの振動の減衰を促進して、計量ホッパへの物品の供給を速やかに停止する必要がある。
【0004】
また、組合せ計量装置においては、トラフの振動の開始と停止とが断続的に繰り返し実行される。そのため、一回の搬送期間を短縮して単位時間あたりの搬送動作の回数を多くするためには、搬送期間の開始時にトラフの振動の成長を促進する必要がある。
【0005】
下記特許文献1,2に開示された電磁フィーダにおいては、計量ホッパへの物品の供給量を安定させて計量精度を高めるべく、トラフの加速度を検出する加速度センサが、一対の板バネの上端部同士を連結する連結部材上に設けられている。そして、加速度センサによって検出された加速度からトラフの振動の振幅を算出し、その振幅が予め設定された目標振幅に近付くようにフィードバック制御がなされている。
【0006】
【特許文献1】特開平11−301833号公報(図3)
【特許文献2】特開平11−295134号公報(図3)
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、上記特許文献1,2に開示された電磁フィーダによると、コイルスプリングを介して機台上に配設されたベース部材の振動が考慮されておらず、フィードバック制御において、加速度センサによる検出値にベース部材の振動の影響が誤差として含まれてしまうという問題がある。
【0008】
本発明は、かかる問題を解決するために成されたものであり、ベース部材の振動による影響を考慮しつつ、搬送期間の開始時にはトラフの振動の成長を促進し、搬送期間の終了時にはトラフの振動の減衰を促進し得る搬送装置(特に電磁フィーダ)、及びそれを備えた計量装置を得ることを目的とする。
【課題を解決するための手段】
【0009】
第1の発明に係る搬送装置は、電磁石への加振パルスの印加によりトラフの振動を開始させ、電磁石への制振パルスの印加によりトラフの振動を停止させることによって、トラフ上の物品を搬送する搬送装置であって、機台と、第1の弾性部材を介して機台上に配設されたベース部材と、第2の弾性部材を介してベース部材上に配設されたトラフと、ベース部材上に配設された電磁石と、電磁石への加振パルス及び制振パルスの印加を制御する制御手段と、ベース部材上に配設され、ベース部材に対するトラフの変位を検出する検出手段と、検出手段によって検出された変位から求めた振動速度に、所定のゲインを乗じたものを、帰還値として制御手段にフィードバックするフィードバック手段とを備え、制御手段は、帰還値に基づいて加振パルス及び制振パルスを設定することを特徴とする。
【0010】
第2の発明に係る搬送装置は、第1の発明に係る搬送装置において特に、制御手段は、トラフの振動の開始時には、振動の成長を促進するパルスを加振パルスとして設定し、トラフの振動の停止時には、振動の減衰を促進するパルスを制振パルスとして設定することを特徴とする。
【0011】
第3の発明に係る搬送装置は、第1又は第2の発明に係る搬送装置において特に、トラフの振動の開始と停止とが断続的に繰り返し実行されることを特徴とする。
【0012】
第4の発明に係る計量装置は、第1〜第3の発明のいずれか一つに係る搬送装置と、当該搬送装置によって搬送された物品を計量する計量手段とを備えることを特徴とする。
【発明の効果】
【0013】
第1の発明に係る搬送装置によれば、ベース部材上に検出手段が配設され、検出手段によって検出された相対変位に基づいて、フィードバック制御が行われる。これにより、ベース部材の振動による影響を考慮しつつ、搬送期間の開始時にはトラフの振動の成長を促進し、搬送期間の終了時にはトラフの振動の減衰を促進することができる。
【0014】
第2の発明に係る搬送装置によれば、搬送期間が短縮されて、単位時間あたりの搬送動作の回数を多くすることができる。また、搬送期間の終了時にトラフの振動が速やかに停止されることにより、電磁フィーダによる物品の搬送を即座に停止することができる。
【0015】
第3の発明に係る搬送装置によれば、所定量の物品の断続搬送が行われる組合せ計量装置への適用が可能となる。
【0016】
第4の発明に係る計量装置によれば、搬送装置から計量手段への物品の搬送量が精度良く制御された計量装置を得ることができる。また、トラフの振動を素早く停止できることから、物品の供給時間の短縮化が図られて、計量サイクルタイムを向上することもできる。
【発明を実施するための最良の形態】
【0017】
以下、本発明の実施の形態について説明する。
【0018】
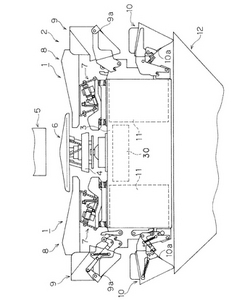
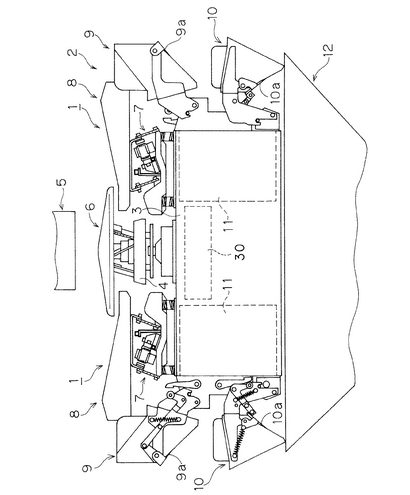
図1は、本発明の実施の形態に係る電磁フィーダ1を備えた組合せ計量装置2の概略構成を示す側面図である。また、図2は、電磁フィーダ1の構成を具体的に示す側面図である。図1を参照して、組合せ計量装置2は、機台3の中央に加振機4を介して設置され、上方の筒状の投入シュート5から投下された被計量物を周囲に分散する分散テーブル6と、その周囲に複数の加振機7のそれぞれを介して放射状に配設され、被計量物を搬送する複数のトラフ8と、複数のトラフ8の先端部下方にそれぞれ位置するように放射状に配設された複数のプールホッパ9と、複数のプールホッパ9のそれぞれの下方に配設された複数の計量ホッパ10とを備えている。
【0019】
機台3の内部には、電磁フィーダ1の動作を制御するフィーダ制御装置30が配設されている。また、機台3の内部には、各プールホッパ9の各ゲート9a及び各計量ホッパ10の各ゲート10aの開閉を制御する、複数のゲート開閉装置11が配設されている。ゲート開閉装置11は、図示しないモータによって駆動され、被計量物の排出指令を受けたときに、図示しない駆動手段により計量ホッパ10内の被計量物を集合シュート12内に排出させ、空になった計量ホッパ10内にプールホッパ9内の被計量物を投入させるように動作する。また、計量ホッパ10には、図示しない重量検出器が機台3内で連設されており、計量ホッパ10内の被計量物の重量を計量する。
【0020】
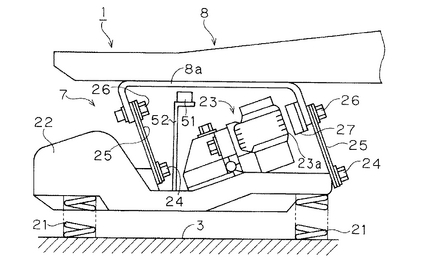
図2を参照して、電磁フィーダ1が備える加振機7は、トラフ8の振動の機台3への伝達を防止するための複数のコイルスプリング21を介して機台3上に設置されたベース部材22と、ベース部材22の上面上に設置された電磁石23と、ベース部材22の前部側(図面右側)及び後部側(図面左側)にボルト24によって後傾姿勢で平行に取り付けられた一対の板バネ25とを有している。但し、一対の板バネ25は必ずしも平行に取り付けられている必要はない。これら両板バネ25の各上部には、トラフ8のブラケット8aがボルト26によって固定されている。また、ブラケット8aにおける電磁石23の磁力発生面23aに対向する面には、磁性体27が取り付けられている。電磁石23には、フィーダ制御装置30によって間欠的に通電がなされる。また、ベース部材22の上面上には支持部材52が固定されており、支持部材52上には、ブラケット8aの底面に対向して変位センサ51が取り付けられている。
【0021】
電磁石23に通電がなされると、磁力発生面23aと磁性体27との間に電磁力(吸引力)が作用し、その結果、前後の板バネ25が撓みながら、またこれと同時にトラフ8がやや沈み込みながら、後方(図面左側)に変位することとなる。つまり、板バネ25が固定されて弾性部材として機能するトラフ8が、後方に変位することとなる。一方、電磁石23への通電が停止されると、磁力発生面23aと磁性体27との間の電磁力(吸引力)が消失し、トラフ8が、板バネ25の弾性復元力によって上方へやや浮き上がりながら前方(図面右側)に変位することとなる。従って、電磁石23に間欠的に通電がなされることによって電磁力が間欠的に発生し、これにより、トラフ8が前後方向に振動することとなる。トラフ8が振動することによって、トラフ8上の物品(被計量物、被搬送物)が図1に示したプールホッパ9に移送される。また、予め定められた物品の搬送期間が終了すると、トラフ8の振動を停止させることにより、電磁フィーダ1からプールホッパ9への物品の移送が停止される。上記の通り、組合せ計量装置2において、電磁フィーダ1からプールホッパ9への物品供給量の精度を向上させるためには、物品の搬送期間の終了時に、トラフ8の振動を即座に停止させることが重要となる。また、一回の搬送期間を短縮して単位時間あたりの搬送動作の回数を多くするためには、搬送期間の開始時にトラフの振動の成長を促進する必要がある。
【0022】
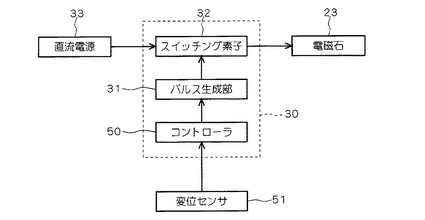
図3は、フィーダ制御装置30の構成を示すブロック図である。フィーダ制御装置30は、コントローラ50、パルス生成部31、及びFET(電界効果トランジスタ)等のスイッチング素子32を備えている。パルス生成部31は、変位センサ51に接続されたコントローラ50から入力された信号に基づき、搬送期間においては、トラフ8の振動の成長を促進又は維持するための制御パルス(加振パルス)を生成して出力し、搬送期間の終了時においては、トラフ8の振動の減衰を促進するための制御パルス(制振パルス)を生成して出力する。パルス生成部31から出力された制御パルスは、スイッチング素子32に入力され、例えばFETのゲート電極にゲート電圧として印加される。制御パルスが入力されている期間、スイッチング素子32は導通状態となって、直流電源33が電磁石23に通電される。
【0023】
図2を参照して、電磁フィーダ1においては、ベース部材22は弾性体であるコイルスプリング21を介して機台3上に配設されており、トラフ8は弾性体である板バネ25を介してベース部材22上に配設されている。つまり、電磁フィーダ1は2つの弾性体を有する2自由度の振動系である。
【0024】
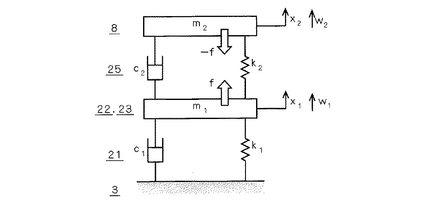
図4は、粘性減衰2自由度振動系を、本実施の形態に係る電磁フィーダ1に対応させて表す図である。c1及びk1は、それぞれコイルスプリング21の減衰係数及びばね定数であり、c2及びk2は、それぞれ板バネ25の減衰係数及びばね定数であり、m1は、コイルスプリング21と板バネ25との間の下側部材(主にベース部材22及び電磁石23)の質量であり、m2は、板バネ25上の上側部材(主にトラフ8)の質量である。また、x1は、機台3に対する下側部材の絶対変位であり、x2は、機台3に対する上側部材の絶対変位であり、f及び−fは、それぞれ下側部材及び上側部材に作用する力である。図2に示したように、変位センサ51はベース部材22上に固定されている。そのため、変位センサ51は、機台3に対するトラフ8の絶対変位x2ではなく、ベース部材22に対するトラフ8の相対変位x2−x1を検出することとなる。
【0025】
図4に示した2自由度振動系の運動方程式は、以下の式(1)及び式(2)として与えられる。
【0026】
【数1】

【0027】
【数2】
【0028】
式(1)は下側部材に関する運動方程式であり、式(2)は上側部材に関する運動方程式である。式中の「’」は1回の微分を意味しており、以下同様とする。また、w1,w2は外乱である。
【0029】
式(1)及び式(2)において、力fは、以下の式(3)として与えられる。
【0030】
【数3】
【0031】
式(3)において、Kは入力ゲインであり、KVはフィードバックゲインであり、uは入力値(例えば電圧値)である。
【0032】
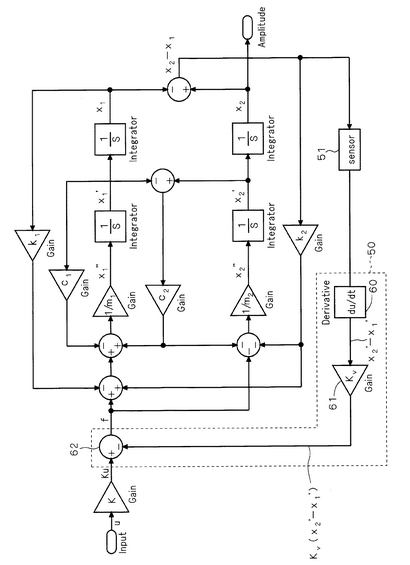
図5は、式(1)〜式(3)を表したブロック線図である。コントローラ50は、微分器60、増幅器61、及び減算器62を有している。微分器60は、変位センサ51によって検出された相対変位x2−x1を微分することにより、相対速度x2’−x1’を出力する。増幅器61は、相対速度x2’−x1’にフィードバックゲインKVを乗じて出力する。減算器62は、KuからKV(x2’−x1’)を減じて力fを出力する。図3を参照して、パルス生成部31は、コントローラ50から入力された力fに応じて、加振パルス及び制振パルスのパルス幅(又は電圧値)を設定する。つまり、コントローラ50は、変位センサ51によって検出された相対変位x2−x1から求めたトラフ8の振動速度(相対速度x2’−x1’)にフィードバックゲインKVを乗じたものを、帰還値としてパルス生成部31にフィードバックするフィードバック手段として機能し、パルス生成部31は、その帰還値に基づいて加振パルス及び制振パルスを設定する。
【0033】
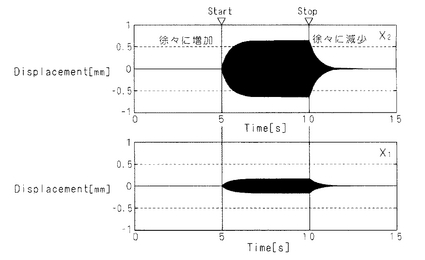
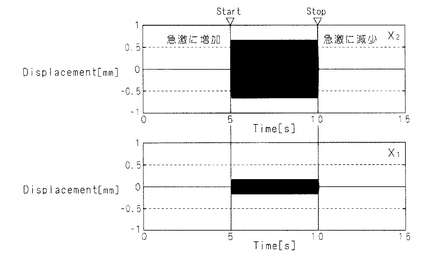
図6は、フィードバック制御を行わない場合の絶対変位x1,x2を示す図であり、図7は、フィードバック制御を行った場合の絶対変位x1,x2を示す図である。フィードバック制御を行わない場合(図6)は、搬送期間の開始時においてトラフ8の振動(絶対変位x2)は徐々に成長し、搬送期間の終了時においてトラフ8の振動は徐々に減衰している。一方、フィードバック制御を行った場合(図7)は、搬送期間の開始時においてトラフ8の振動は急激に成長し、搬送期間の終了時においてトラフ8の振動は急激に減衰している。
【0034】
このように本実施の形態に係る電磁フィーダ1によれば、ベース部材22上に変位センサ51を配設し、変位センサ51によって検出された相対変位x2−x1に基づくフィードバック制御を行う。これにより、ベース部材22の振動による影響を考慮しつつ、搬送期間の開始時にはトラフ8の振動の成長を促進し、搬送期間の終了時にはトラフ8の振動の減衰を促進することができる。その結果、搬送期間が短縮されて、単位時間あたりの搬送動作の回数を多くすることができる。また、搬送期間の終了時にトラフ8の振動が速やかに停止されることにより、電磁フィーダ1からプールホッパ9への物品の移送を即座に停止でき、惰性の振動によって物品供給量が目標量より多くなる事態を回避することができる。
【0035】
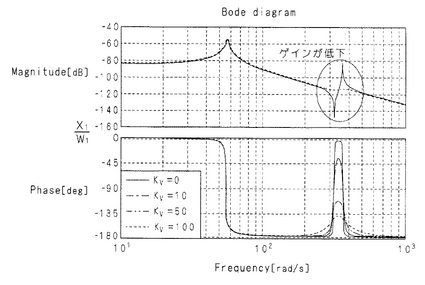
以下、フィードバックゲインKVの設定について説明する。図8は、外乱を加えた場合に、フィードバックゲインKVの値と外乱の影響との関係を調べた結果を示すグラフである。フィードバックゲインKVの値が大きいほど、外乱の影響が小さくなっていることが分かる。従って、外乱の影響を小さくして安定した駆動を実現するためには、フィードバックゲインKVの値は大きいほうが望ましいと言える。
【0036】
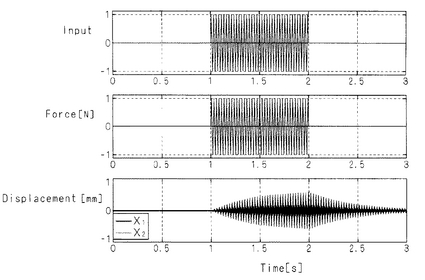
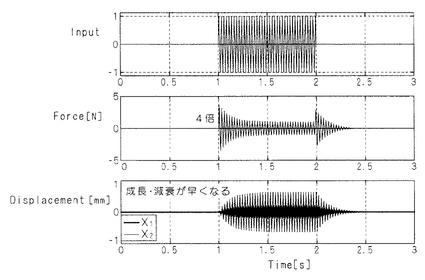
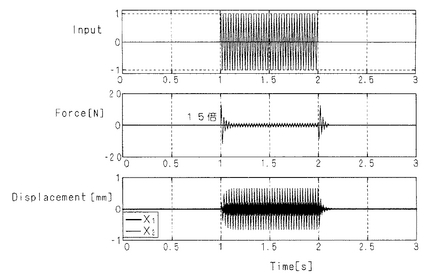
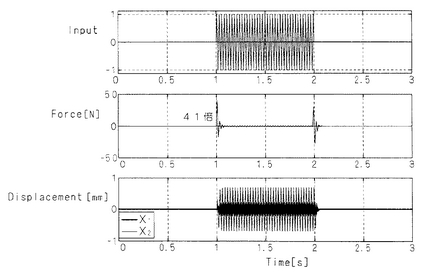
図9〜12は、フィードバックゲインKVの値と、力f及び絶対変位x1,x2との関係を調べた結果を示すグラフである。フィードバックゲインKVの値は、図9ではKV=0、図10ではKV=10、図11ではKV=50、図12ではKV=150である。なお、入力ゲインKの値は、図9ではK=1、図10ではK=3.9、図11ではK=15.7、図12ではK=45.1である。入力ゲインKの値は、以下の式(4)及び式(5)によって、フィードバックゲインKVの値から求めることができる。なお、式(4)において、s=jω(ωは共振周波数)であり、detA’はKV=0のときのdetAである。
【0037】
【数4】
【0038】
【数5】
【0039】
図9〜12を参照して、フィードバックゲインKVの値が大きくなるほど、トラフ8の振動の成長及び減衰が急峻になり、KV=150のときには実用上問題のない特性が得られていることが分かる。
【0040】
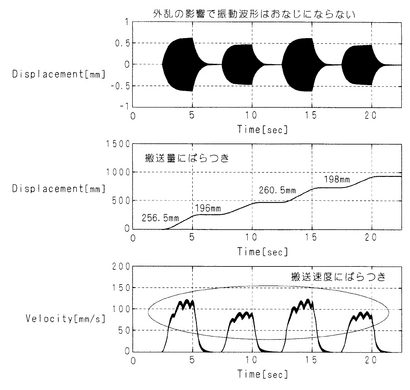
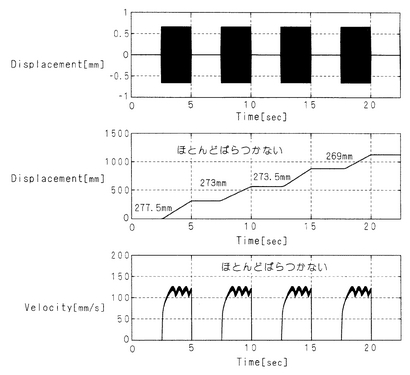
図13は、フィードバック制御を行わず、減衰方向の外乱を与え、断続搬送を行ったときの、トラフ8の絶対変位x2(上段)、物品の搬送量(中段)、及び搬送速度(下段)のシミュレーション結果を示すグラフであり、同様に図14は、フィードバック制御を行い、減衰方向の外乱を与え、断続搬送を行ったときの、トラフ8の絶対変位x2(上段)、物品の搬送量(中段)、及び搬送速度(下段)のシミュレーション結果を示すグラフである。中段の物品の搬送量は、下段の搬送速度の積分値として得られる。
【0041】
フィードバック制御を行わない場合(図13)は、外乱の影響によって、絶対変位x2、搬送量、及び搬送速度が、各搬送期間ごとにばらついている。一方、フィードバック制御を行った場合(図14)は、絶対変位x2、搬送量、及び搬送速度は、ほとんどばらついておらず、本実施の形態に係るフィードバック制御は、断続搬送においても効果的であることが分かる。
【図面の簡単な説明】
【0042】
【図1】本発明の実施の形態に係る電磁フィーダを備えた組合せ計量装置の概略構成を示す側面図である。
【図2】電磁フィーダの構成を具体的に示す側面図である。
【図3】フィーダ制御装置の構成を示すブロック図である。
【図4】粘性減衰2自由度振動系を、本発明の実施の形態に係る電磁フィーダに対応させて表す図である。
【図5】式(1)〜式(3)を表したブロック線図である。
【図6】フィードバック制御を行わない場合の絶対変位を示す図である。
【図7】フィードバック制御を行った場合の絶対変位を示す図である。
【図8】外乱を加えた場合に、フィードバックゲインの値と外乱の影響との関係を調べた結果を示すグラフである。
【図9】フィードバックゲインの値と、力及び絶対変位との関係を調べた結果を示すグラフである。
【図10】フィードバックゲインの値と、力及び絶対変位との関係を調べた結果を示すグラフである。
【図11】フィードバックゲインの値と、力及び絶対変位との関係を調べた結果を示すグラフである。
【図12】フィードバックゲインの値と、力及び絶対変位との関係を調べた結果を示すグラフである。
【図13】フィードバック制御を行わず、減衰方向の外乱を与え、断続搬送を行ったときの、トラフの絶対変位(上段)、物品の搬送量(中段)、及び搬送速度(下段)のシミュレーション結果を示すグラフである。
【図14】フィードバック制御を行い、減衰方向の外乱を与え、断続搬送を行ったときの、トラフの絶対変位(上段)、物品の搬送量(中段)、及び搬送速度(下段)のシミュレーション結果を示すグラフである。
【符号の説明】
【0043】
1 電磁フィーダ
2 組合せ計量装置
3 機台
7 加振機
8 トラフ
21 コイルスプリング
22 ベース部材
23 電磁石
25 板バネ
27 磁性体
30 フィーダ制御装置
50 コントローラ
【技術分野】
【0001】
本発明は、搬送装置及び計量装置に関し、特に、電磁石で間欠的に発生させた電磁力によりトラフを振動させて物品を搬送する電磁フィーダ、及びそれを備えた計量装置に関する。
【背景技術】
【0002】
計量装置は、供給された物品を計量ホッパへ移送するための電磁フィーダを備えて構成されている。電磁フィーダは、コイルスプリングを介して機台上に配設されたベース部材と、前後一対の板バネを介してベース部材上に取り付けられたトラフと、ベース部材上に設置された電磁石と、電磁石に間欠的に通電する通電制御手段とを有している。そして、電磁石で電磁力を間欠的に発生させて、その発生時に板バネを撓ませながらトラフを一方に変位させ、また、その非発生時にバネ体の弾性復元力によってトラフを他方に変位させることにより、トラフを振動させてトラフ上の物品を所定方向へ移送する。
【0003】
この種の電磁フィーダが複数設けられた例えば組合せ計量装置等において計量精度の向上を図るためには、電磁フィーダから計量ホッパへの物品供給量の精度を向上させる必要がある。ここで、搬送期間の終了時に電磁石への通電を停止しただけでは、トラフの振幅は自然減衰するだけであるから、しばらくの間振動が継続して物品が搬送され続けることとなる。つまり、物品の実質的な供給期間が長くなって、物品供給量が目標量より多くなる。これを防止するためには、搬送期間の終了時にトラフの振動の減衰を促進して、計量ホッパへの物品の供給を速やかに停止する必要がある。
【0004】
また、組合せ計量装置においては、トラフの振動の開始と停止とが断続的に繰り返し実行される。そのため、一回の搬送期間を短縮して単位時間あたりの搬送動作の回数を多くするためには、搬送期間の開始時にトラフの振動の成長を促進する必要がある。
【0005】
下記特許文献1,2に開示された電磁フィーダにおいては、計量ホッパへの物品の供給量を安定させて計量精度を高めるべく、トラフの加速度を検出する加速度センサが、一対の板バネの上端部同士を連結する連結部材上に設けられている。そして、加速度センサによって検出された加速度からトラフの振動の振幅を算出し、その振幅が予め設定された目標振幅に近付くようにフィードバック制御がなされている。
【0006】
【特許文献1】特開平11−301833号公報(図3)
【特許文献2】特開平11−295134号公報(図3)
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、上記特許文献1,2に開示された電磁フィーダによると、コイルスプリングを介して機台上に配設されたベース部材の振動が考慮されておらず、フィードバック制御において、加速度センサによる検出値にベース部材の振動の影響が誤差として含まれてしまうという問題がある。
【0008】
本発明は、かかる問題を解決するために成されたものであり、ベース部材の振動による影響を考慮しつつ、搬送期間の開始時にはトラフの振動の成長を促進し、搬送期間の終了時にはトラフの振動の減衰を促進し得る搬送装置(特に電磁フィーダ)、及びそれを備えた計量装置を得ることを目的とする。
【課題を解決するための手段】
【0009】
第1の発明に係る搬送装置は、電磁石への加振パルスの印加によりトラフの振動を開始させ、電磁石への制振パルスの印加によりトラフの振動を停止させることによって、トラフ上の物品を搬送する搬送装置であって、機台と、第1の弾性部材を介して機台上に配設されたベース部材と、第2の弾性部材を介してベース部材上に配設されたトラフと、ベース部材上に配設された電磁石と、電磁石への加振パルス及び制振パルスの印加を制御する制御手段と、ベース部材上に配設され、ベース部材に対するトラフの変位を検出する検出手段と、検出手段によって検出された変位から求めた振動速度に、所定のゲインを乗じたものを、帰還値として制御手段にフィードバックするフィードバック手段とを備え、制御手段は、帰還値に基づいて加振パルス及び制振パルスを設定することを特徴とする。
【0010】
第2の発明に係る搬送装置は、第1の発明に係る搬送装置において特に、制御手段は、トラフの振動の開始時には、振動の成長を促進するパルスを加振パルスとして設定し、トラフの振動の停止時には、振動の減衰を促進するパルスを制振パルスとして設定することを特徴とする。
【0011】
第3の発明に係る搬送装置は、第1又は第2の発明に係る搬送装置において特に、トラフの振動の開始と停止とが断続的に繰り返し実行されることを特徴とする。
【0012】
第4の発明に係る計量装置は、第1〜第3の発明のいずれか一つに係る搬送装置と、当該搬送装置によって搬送された物品を計量する計量手段とを備えることを特徴とする。
【発明の効果】
【0013】
第1の発明に係る搬送装置によれば、ベース部材上に検出手段が配設され、検出手段によって検出された相対変位に基づいて、フィードバック制御が行われる。これにより、ベース部材の振動による影響を考慮しつつ、搬送期間の開始時にはトラフの振動の成長を促進し、搬送期間の終了時にはトラフの振動の減衰を促進することができる。
【0014】
第2の発明に係る搬送装置によれば、搬送期間が短縮されて、単位時間あたりの搬送動作の回数を多くすることができる。また、搬送期間の終了時にトラフの振動が速やかに停止されることにより、電磁フィーダによる物品の搬送を即座に停止することができる。
【0015】
第3の発明に係る搬送装置によれば、所定量の物品の断続搬送が行われる組合せ計量装置への適用が可能となる。
【0016】
第4の発明に係る計量装置によれば、搬送装置から計量手段への物品の搬送量が精度良く制御された計量装置を得ることができる。また、トラフの振動を素早く停止できることから、物品の供給時間の短縮化が図られて、計量サイクルタイムを向上することもできる。
【発明を実施するための最良の形態】
【0017】
以下、本発明の実施の形態について説明する。
【0018】
図1は、本発明の実施の形態に係る電磁フィーダ1を備えた組合せ計量装置2の概略構成を示す側面図である。また、図2は、電磁フィーダ1の構成を具体的に示す側面図である。図1を参照して、組合せ計量装置2は、機台3の中央に加振機4を介して設置され、上方の筒状の投入シュート5から投下された被計量物を周囲に分散する分散テーブル6と、その周囲に複数の加振機7のそれぞれを介して放射状に配設され、被計量物を搬送する複数のトラフ8と、複数のトラフ8の先端部下方にそれぞれ位置するように放射状に配設された複数のプールホッパ9と、複数のプールホッパ9のそれぞれの下方に配設された複数の計量ホッパ10とを備えている。
【0019】
機台3の内部には、電磁フィーダ1の動作を制御するフィーダ制御装置30が配設されている。また、機台3の内部には、各プールホッパ9の各ゲート9a及び各計量ホッパ10の各ゲート10aの開閉を制御する、複数のゲート開閉装置11が配設されている。ゲート開閉装置11は、図示しないモータによって駆動され、被計量物の排出指令を受けたときに、図示しない駆動手段により計量ホッパ10内の被計量物を集合シュート12内に排出させ、空になった計量ホッパ10内にプールホッパ9内の被計量物を投入させるように動作する。また、計量ホッパ10には、図示しない重量検出器が機台3内で連設されており、計量ホッパ10内の被計量物の重量を計量する。
【0020】
図2を参照して、電磁フィーダ1が備える加振機7は、トラフ8の振動の機台3への伝達を防止するための複数のコイルスプリング21を介して機台3上に設置されたベース部材22と、ベース部材22の上面上に設置された電磁石23と、ベース部材22の前部側(図面右側)及び後部側(図面左側)にボルト24によって後傾姿勢で平行に取り付けられた一対の板バネ25とを有している。但し、一対の板バネ25は必ずしも平行に取り付けられている必要はない。これら両板バネ25の各上部には、トラフ8のブラケット8aがボルト26によって固定されている。また、ブラケット8aにおける電磁石23の磁力発生面23aに対向する面には、磁性体27が取り付けられている。電磁石23には、フィーダ制御装置30によって間欠的に通電がなされる。また、ベース部材22の上面上には支持部材52が固定されており、支持部材52上には、ブラケット8aの底面に対向して変位センサ51が取り付けられている。
【0021】
電磁石23に通電がなされると、磁力発生面23aと磁性体27との間に電磁力(吸引力)が作用し、その結果、前後の板バネ25が撓みながら、またこれと同時にトラフ8がやや沈み込みながら、後方(図面左側)に変位することとなる。つまり、板バネ25が固定されて弾性部材として機能するトラフ8が、後方に変位することとなる。一方、電磁石23への通電が停止されると、磁力発生面23aと磁性体27との間の電磁力(吸引力)が消失し、トラフ8が、板バネ25の弾性復元力によって上方へやや浮き上がりながら前方(図面右側)に変位することとなる。従って、電磁石23に間欠的に通電がなされることによって電磁力が間欠的に発生し、これにより、トラフ8が前後方向に振動することとなる。トラフ8が振動することによって、トラフ8上の物品(被計量物、被搬送物)が図1に示したプールホッパ9に移送される。また、予め定められた物品の搬送期間が終了すると、トラフ8の振動を停止させることにより、電磁フィーダ1からプールホッパ9への物品の移送が停止される。上記の通り、組合せ計量装置2において、電磁フィーダ1からプールホッパ9への物品供給量の精度を向上させるためには、物品の搬送期間の終了時に、トラフ8の振動を即座に停止させることが重要となる。また、一回の搬送期間を短縮して単位時間あたりの搬送動作の回数を多くするためには、搬送期間の開始時にトラフの振動の成長を促進する必要がある。
【0022】
図3は、フィーダ制御装置30の構成を示すブロック図である。フィーダ制御装置30は、コントローラ50、パルス生成部31、及びFET(電界効果トランジスタ)等のスイッチング素子32を備えている。パルス生成部31は、変位センサ51に接続されたコントローラ50から入力された信号に基づき、搬送期間においては、トラフ8の振動の成長を促進又は維持するための制御パルス(加振パルス)を生成して出力し、搬送期間の終了時においては、トラフ8の振動の減衰を促進するための制御パルス(制振パルス)を生成して出力する。パルス生成部31から出力された制御パルスは、スイッチング素子32に入力され、例えばFETのゲート電極にゲート電圧として印加される。制御パルスが入力されている期間、スイッチング素子32は導通状態となって、直流電源33が電磁石23に通電される。
【0023】
図2を参照して、電磁フィーダ1においては、ベース部材22は弾性体であるコイルスプリング21を介して機台3上に配設されており、トラフ8は弾性体である板バネ25を介してベース部材22上に配設されている。つまり、電磁フィーダ1は2つの弾性体を有する2自由度の振動系である。
【0024】
図4は、粘性減衰2自由度振動系を、本実施の形態に係る電磁フィーダ1に対応させて表す図である。c1及びk1は、それぞれコイルスプリング21の減衰係数及びばね定数であり、c2及びk2は、それぞれ板バネ25の減衰係数及びばね定数であり、m1は、コイルスプリング21と板バネ25との間の下側部材(主にベース部材22及び電磁石23)の質量であり、m2は、板バネ25上の上側部材(主にトラフ8)の質量である。また、x1は、機台3に対する下側部材の絶対変位であり、x2は、機台3に対する上側部材の絶対変位であり、f及び−fは、それぞれ下側部材及び上側部材に作用する力である。図2に示したように、変位センサ51はベース部材22上に固定されている。そのため、変位センサ51は、機台3に対するトラフ8の絶対変位x2ではなく、ベース部材22に対するトラフ8の相対変位x2−x1を検出することとなる。
【0025】
図4に示した2自由度振動系の運動方程式は、以下の式(1)及び式(2)として与えられる。
【0026】
【数1】
【0027】
【数2】
【0028】
式(1)は下側部材に関する運動方程式であり、式(2)は上側部材に関する運動方程式である。式中の「’」は1回の微分を意味しており、以下同様とする。また、w1,w2は外乱である。
【0029】
式(1)及び式(2)において、力fは、以下の式(3)として与えられる。
【0030】
【数3】
【0031】
式(3)において、Kは入力ゲインであり、KVはフィードバックゲインであり、uは入力値(例えば電圧値)である。
【0032】
図5は、式(1)〜式(3)を表したブロック線図である。コントローラ50は、微分器60、増幅器61、及び減算器62を有している。微分器60は、変位センサ51によって検出された相対変位x2−x1を微分することにより、相対速度x2’−x1’を出力する。増幅器61は、相対速度x2’−x1’にフィードバックゲインKVを乗じて出力する。減算器62は、KuからKV(x2’−x1’)を減じて力fを出力する。図3を参照して、パルス生成部31は、コントローラ50から入力された力fに応じて、加振パルス及び制振パルスのパルス幅(又は電圧値)を設定する。つまり、コントローラ50は、変位センサ51によって検出された相対変位x2−x1から求めたトラフ8の振動速度(相対速度x2’−x1’)にフィードバックゲインKVを乗じたものを、帰還値としてパルス生成部31にフィードバックするフィードバック手段として機能し、パルス生成部31は、その帰還値に基づいて加振パルス及び制振パルスを設定する。
【0033】
図6は、フィードバック制御を行わない場合の絶対変位x1,x2を示す図であり、図7は、フィードバック制御を行った場合の絶対変位x1,x2を示す図である。フィードバック制御を行わない場合(図6)は、搬送期間の開始時においてトラフ8の振動(絶対変位x2)は徐々に成長し、搬送期間の終了時においてトラフ8の振動は徐々に減衰している。一方、フィードバック制御を行った場合(図7)は、搬送期間の開始時においてトラフ8の振動は急激に成長し、搬送期間の終了時においてトラフ8の振動は急激に減衰している。
【0034】
このように本実施の形態に係る電磁フィーダ1によれば、ベース部材22上に変位センサ51を配設し、変位センサ51によって検出された相対変位x2−x1に基づくフィードバック制御を行う。これにより、ベース部材22の振動による影響を考慮しつつ、搬送期間の開始時にはトラフ8の振動の成長を促進し、搬送期間の終了時にはトラフ8の振動の減衰を促進することができる。その結果、搬送期間が短縮されて、単位時間あたりの搬送動作の回数を多くすることができる。また、搬送期間の終了時にトラフ8の振動が速やかに停止されることにより、電磁フィーダ1からプールホッパ9への物品の移送を即座に停止でき、惰性の振動によって物品供給量が目標量より多くなる事態を回避することができる。
【0035】
以下、フィードバックゲインKVの設定について説明する。図8は、外乱を加えた場合に、フィードバックゲインKVの値と外乱の影響との関係を調べた結果を示すグラフである。フィードバックゲインKVの値が大きいほど、外乱の影響が小さくなっていることが分かる。従って、外乱の影響を小さくして安定した駆動を実現するためには、フィードバックゲインKVの値は大きいほうが望ましいと言える。
【0036】
図9〜12は、フィードバックゲインKVの値と、力f及び絶対変位x1,x2との関係を調べた結果を示すグラフである。フィードバックゲインKVの値は、図9ではKV=0、図10ではKV=10、図11ではKV=50、図12ではKV=150である。なお、入力ゲインKの値は、図9ではK=1、図10ではK=3.9、図11ではK=15.7、図12ではK=45.1である。入力ゲインKの値は、以下の式(4)及び式(5)によって、フィードバックゲインKVの値から求めることができる。なお、式(4)において、s=jω(ωは共振周波数)であり、detA’はKV=0のときのdetAである。
【0037】
【数4】
【0038】
【数5】
【0039】
図9〜12を参照して、フィードバックゲインKVの値が大きくなるほど、トラフ8の振動の成長及び減衰が急峻になり、KV=150のときには実用上問題のない特性が得られていることが分かる。
【0040】
図13は、フィードバック制御を行わず、減衰方向の外乱を与え、断続搬送を行ったときの、トラフ8の絶対変位x2(上段)、物品の搬送量(中段)、及び搬送速度(下段)のシミュレーション結果を示すグラフであり、同様に図14は、フィードバック制御を行い、減衰方向の外乱を与え、断続搬送を行ったときの、トラフ8の絶対変位x2(上段)、物品の搬送量(中段)、及び搬送速度(下段)のシミュレーション結果を示すグラフである。中段の物品の搬送量は、下段の搬送速度の積分値として得られる。
【0041】
フィードバック制御を行わない場合(図13)は、外乱の影響によって、絶対変位x2、搬送量、及び搬送速度が、各搬送期間ごとにばらついている。一方、フィードバック制御を行った場合(図14)は、絶対変位x2、搬送量、及び搬送速度は、ほとんどばらついておらず、本実施の形態に係るフィードバック制御は、断続搬送においても効果的であることが分かる。
【図面の簡単な説明】
【0042】
【図1】本発明の実施の形態に係る電磁フィーダを備えた組合せ計量装置の概略構成を示す側面図である。
【図2】電磁フィーダの構成を具体的に示す側面図である。
【図3】フィーダ制御装置の構成を示すブロック図である。
【図4】粘性減衰2自由度振動系を、本発明の実施の形態に係る電磁フィーダに対応させて表す図である。
【図5】式(1)〜式(3)を表したブロック線図である。
【図6】フィードバック制御を行わない場合の絶対変位を示す図である。
【図7】フィードバック制御を行った場合の絶対変位を示す図である。
【図8】外乱を加えた場合に、フィードバックゲインの値と外乱の影響との関係を調べた結果を示すグラフである。
【図9】フィードバックゲインの値と、力及び絶対変位との関係を調べた結果を示すグラフである。
【図10】フィードバックゲインの値と、力及び絶対変位との関係を調べた結果を示すグラフである。
【図11】フィードバックゲインの値と、力及び絶対変位との関係を調べた結果を示すグラフである。
【図12】フィードバックゲインの値と、力及び絶対変位との関係を調べた結果を示すグラフである。
【図13】フィードバック制御を行わず、減衰方向の外乱を与え、断続搬送を行ったときの、トラフの絶対変位(上段)、物品の搬送量(中段)、及び搬送速度(下段)のシミュレーション結果を示すグラフである。
【図14】フィードバック制御を行い、減衰方向の外乱を与え、断続搬送を行ったときの、トラフの絶対変位(上段)、物品の搬送量(中段)、及び搬送速度(下段)のシミュレーション結果を示すグラフである。
【符号の説明】
【0043】
1 電磁フィーダ
2 組合せ計量装置
3 機台
7 加振機
8 トラフ
21 コイルスプリング
22 ベース部材
23 電磁石
25 板バネ
27 磁性体
30 フィーダ制御装置
50 コントローラ
【特許請求の範囲】
【請求項1】
電磁石への加振パルスの印加によりトラフの振動を開始させ、前記電磁石への制振パルスの印加により前記トラフの振動を停止させることによって、前記トラフ上の物品を搬送する搬送装置であって、
機台と、
第1の弾性部材を介して前記機台上に配設されたベース部材と、
第2の弾性部材を介して前記ベース部材上に配設された前記トラフと、
前記ベース部材上に配設された前記電磁石と、
前記電磁石への前記加振パルス及び前記制振パルスの印加を制御する制御手段と、
前記ベース部材上に配設され、前記ベース部材に対する前記トラフの変位を検出する検出手段と、
前記検出手段によって検出された前記変位から求めた振動速度に、所定のゲインを乗じたものを、帰還値として前記制御手段にフィードバックするフィードバック手段と
を備え、
前記制御手段は、前記帰還値に基づいて前記加振パルス及び前記制振パルスを設定する、搬送装置。
【請求項2】
前記制御手段は、
前記トラフの振動の開始時には、振動の成長を促進するパルスを前記加振パルスとして設定し、
前記トラフの振動の停止時には、振動の減衰を促進するパルスを前記制振パルスとして設定する、請求項1に記載の搬送装置。
【請求項3】
前記トラフの振動の開始と停止とが断続的に繰り返し実行される、請求項1又は2に記載の搬送装置。
【請求項4】
請求項1〜3のいずれか一つに記載の搬送装置と、
当該搬送装置によって搬送された物品を計量する計量手段と
を備える、計量装置。
【請求項1】
電磁石への加振パルスの印加によりトラフの振動を開始させ、前記電磁石への制振パルスの印加により前記トラフの振動を停止させることによって、前記トラフ上の物品を搬送する搬送装置であって、
機台と、
第1の弾性部材を介して前記機台上に配設されたベース部材と、
第2の弾性部材を介して前記ベース部材上に配設された前記トラフと、
前記ベース部材上に配設された前記電磁石と、
前記電磁石への前記加振パルス及び前記制振パルスの印加を制御する制御手段と、
前記ベース部材上に配設され、前記ベース部材に対する前記トラフの変位を検出する検出手段と、
前記検出手段によって検出された前記変位から求めた振動速度に、所定のゲインを乗じたものを、帰還値として前記制御手段にフィードバックするフィードバック手段と
を備え、
前記制御手段は、前記帰還値に基づいて前記加振パルス及び前記制振パルスを設定する、搬送装置。
【請求項2】
前記制御手段は、
前記トラフの振動の開始時には、振動の成長を促進するパルスを前記加振パルスとして設定し、
前記トラフの振動の停止時には、振動の減衰を促進するパルスを前記制振パルスとして設定する、請求項1に記載の搬送装置。
【請求項3】
前記トラフの振動の開始と停止とが断続的に繰り返し実行される、請求項1又は2に記載の搬送装置。
【請求項4】
請求項1〜3のいずれか一つに記載の搬送装置と、
当該搬送装置によって搬送された物品を計量する計量手段と
を備える、計量装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2006−160404(P2006−160404A)
【公開日】平成18年6月22日(2006.6.22)
【国際特許分類】
【出願番号】特願2004−351164(P2004−351164)
【出願日】平成16年12月3日(2004.12.3)
【出願人】(000147833)株式会社イシダ (859)
【Fターム(参考)】
【公開日】平成18年6月22日(2006.6.22)
【国際特許分類】
【出願日】平成16年12月3日(2004.12.3)
【出願人】(000147833)株式会社イシダ (859)
【Fターム(参考)】
[ Back to top ]