
搬送装置及び除塵機
【課題】スクレーパの形状を工夫し、上方から搬送コンベアに落下する重量物がスクレーパに当たった時に、スクレーパが損傷するのを防止できるようにする。
【解決手段】例えば塵芥のような物体を載置場所から所定の場所まで搬送する搬送コンベア10において、載置場所から所定の場所に至る底板11と、底板11上の物体を、載置場所から所定の場所まで移動する梯子状コンベア12とを備え、梯子状コンベア12には、物体を従動させる多角形の断面形状を有したスクレーパ14が設けられるものである。この構成により、スクレーパ14の強度を向上できるので、物体を従動させる機能を下げることなく、上方から落下する重量物によるスクレーパ14の損傷を防ぐことができる。
【解決手段】例えば塵芥のような物体を載置場所から所定の場所まで搬送する搬送コンベア10において、載置場所から所定の場所に至る底板11と、底板11上の物体を、載置場所から所定の場所まで移動する梯子状コンベア12とを備え、梯子状コンベア12には、物体を従動させる多角形の断面形状を有したスクレーパ14が設けられるものである。この構成により、スクレーパ14の強度を向上できるので、物体を従動させる機能を下げることなく、上方から落下する重量物によるスクレーパ14の損傷を防ぐことができる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、ダム取水口のスクリーンに堆積する塵芥の自動除塵作業に適用可能な搬送装置及び除塵機に関する。
【0002】
詳しくは、スクリーンから掻き上げられた塵芥を搬送する為の搬送路に、その載置場所から所定の場所まで移動する無終端状の駆動手段を備え、この駆動手段に塵芥を従動させる為に設けられた搬送部の形状を工夫して、強度を向上できるようにするとともに、上方から落下する重量物による搬送部の損傷を防止できるようにしたものである。
【背景技術】
【0003】
従来、ダム及び河川等からの水を水力発電所に取り入れる取水口付近には、櫛形状に開口されたスクリーンと呼ばれる建造物が配置され、落葉や流木等の塵芥が施設内に入り込まないようにせき止めている。
【0004】
スクリーンの表面には、せき止められた塵芥が徐々に堆積するので、通常スクリーンの上部付近には除塵機が配置され、それらの塵芥を除去するように動作する。除塵機は、例えば、平常時には1日に2〜3回、取水時には常に、自動運転するように操作される。
【0005】
これらのスクリーン用の除塵機の多くは、レーキと呼ばれる熊手型の掻上装置により、水面の塵芥を掻き上げ、掻き上げられた塵芥を搬送コンベアにより搬送(搬出)するように構成されている。
【0006】
塵芥を搬送する搬送コンベアは、例えば、搬送路を構成する底板と、底板の短手方向の両端部に配置される2つの駆動用のコンベアチェーンと、2つのコンベアチェーンに両端部を連結された、搬送部とを備え、レーキの可動域上端部の下方付近に配置される。このように搬送コンベアを配置することにより、上方のレーキからの塵芥を、自然落下させて搬送コンベアに移すことができるようになる。また、これらの搬送コンベアにおいて、駆動用のコンベアチェーンに連結され、塵芥を従動させる搬送部には、軽量化の為、例えばL字型の断面形状を有する山形綱が使用されていることが多い。
【0007】
なお、これに関連して特許文献1に示すような除塵機が開示されている。この除塵機によれば、スクリーンの上部に配置された除塵機の架台に、スクリーン上端の延長上に位置して該スクリーンと略同傾斜角度の前面エプロンが設けられるとともに、前面エプロンの下手側に位置してゴミ受けトラフ又はゴミ受兼搬出コンベアが設けられる。
【0008】
また、上述の架台上には、除塵機架構が立設され、該架構にレーキアームが昇降する多段式除塵手段と、レーキが自動降下するワイヤーロープ式除塵手段をスクリーンに沿って併設し、各レーキを格別の駆動手段により、それぞれ別個の運転しうるようにしたものである。このように構成することにより、スクリーンに流着する種々雑多な塵芥の質、量に対応して、除塵装置を選択使用することができるというものである。
【0009】
【特許文献1】特開平7−197433号公報(第3頁、図1)
【発明の開示】
【発明が解決しようとする課題】
【0010】
しかし、従来例に係る除塵機によれば、塵芥を従動させる搬送コンベアの搬送部に、例えば山形綱(アングル)を使用するものである。搬送部に使用された山形綱は、一方の面を上方に、他方の面を進行方向に向け、逆L字型になるようにしてコンベアチェーンに連結される。
【0011】
従って、上方から塵芥が落下して移送される時、落下した塵芥に当たった搬送部が衝撃を充分に吸収できずに変形するおそれがある。また、底板に乗せられた塵芥を搬送する時、搬送部の開口された下部に塵芥が入り込み、例えば端部での回転時に、搬送部が塵芥を噛み込んでしまい、搬送コンベアの搬送が止まったり、搬送部が変形するおそれがある。なお、特許文献1に示す除塵機においても、同様の問題が想定される。
【0012】
そこで本発明は、上述の問題に鑑み創作されたものであり、搬送部の形状を工夫し、上方から搬送コンベアに落下する重量物が搬送部に当たった時に、搬送部が損傷するのを防ぐとともに、搬送部による塵芥の噛み込みを最小限に抑えられるようにした搬送装置及び除塵機を提供することを目的とする。
【課題を解決するための手段】
【0013】
この発明に係る搬送装置は、物体を載置場所から所定の場所まで搬送する搬送装置において、載置場所から所定の場所に至る搬送路と、搬送路上の物体を、載置場所から所定の場所まで移動する無終端状の駆動手段とを備え、駆動手段には、物体を従動させる多角形の断面形状を有した搬送部が設けられることを特徴とするものである。
【0014】
この発明に係る搬送装置によれば、搬送路上の物体を、無終端状の駆動手段に従動させる搬送部が、多角形の断面形状を有するものである。従って、搬送部の強度を向上できるので、上方から落下する重量物による搬送部の損傷を防ぐことができる。また、従来方式の逆L字型の搬送部に比べて、下部の空間に物体が入り込みにくいので、当該搬送部による物体の噛み込みを防ぐことができる。
【0015】
この発明に係る除塵機は、水面に浮遊する塵芥を掻き上げる掻上装置と、掻上装置により掻き上げられた塵芥を上面に載せられ、上面に載せられた塵芥を、載置場所から所定の場所まで搬送する搬送装置とを備える除塵機において、搬送装置は、載置場所から所定の場所に至る搬送路と、搬送路上の塵芥を、載置場所から所定の場所まで移動する無終端状の駆動手段とを備え、駆動手段には、塵芥を従動させる多角形の断面形状を有した搬送部が設けられることを特徴とするものである。
【0016】
この発明に係る除塵機によれば、本発明に係る搬送装置が応用されている。従って、搬送部の強度を向上できるので、上方から落下する重量物による搬送部の損傷を防ぐことができる。また、下部の空間に塵芥が入り込みにくいので、搬送部による塵芥の噛み込みを防ぐことができる。
【発明の効果】
【0017】
この発明に係る搬送装置によれば、搬送路上の物体を、載置場所から所定の場所まで移動する無終端状の駆動手段に、物体を従動させる多角形の断面形状を有した搬送部が設けられるものである。この構成により、搬送部の強度を向上できるので、物体を従動させる機能を下げることなく、上方から落下する重量物による搬送部の損傷を防ぐことができる。これにより、当該搬送装置を除塵機に充分応用できる。
【0018】
この発明に係る除塵機によれば、本発明に係る搬送装置を備えるものである。この構成により、搬送部の強度を向上できるので、塵芥を従動させる機能を下げることなく、上方から落下する重量物による搬送部の損傷を防ぐことができる。
【発明を実施するための最良の形態】
【0019】
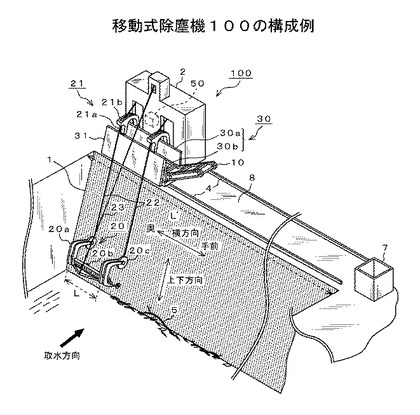
続いて、この発明に係る実施の形態としての搬送装置及び除塵機について、図面を参照しながら説明をする。図1は、本発明に係る実施の形態としての移動式除塵機100の構成例を示す斜視図である。図1に示す移動式除塵機100は、本発明の搬送装置を応用した除塵機の一例を構成し、水力発電所取水口のスクリーン1に堆積した塵芥を除去するものである。
【0020】
移動式除塵機100が設置されるダム構築物は、所定形状を有した堰堤部を備え、堰堤部の上部は平面上の基礎スラブ8を成す。基礎スラブ8の下部には、貯水池から水力発電所施設内への取水路が複数開口されており、基礎スラブ8の貯水池側には、取水路の開口部を覆うようにして、スクリーン1が設置されている。スクリーン1は、貯水池の底面から基礎スラブ8平面に架けて傾斜されて設置されている。基礎スラブ8上には、レール4がスクリーン1の横方向に平行に引かれている。レール4は、スクリーン1の幅とほぼ同等な長さを有し、移動式除塵機100の移動路を構成する。
【0021】
移動式除塵機100は、図1,2に示すように操作室2、走行車輪3、レーキ装置20、レーキ受アーム21、巻上用ワイヤーロープ22、開口用ワイヤーロープ23、巻上用ドラム24、開口用ドラム25、ホッパー30、エプロン31、搬送コンベア10及び駆動制御システム50を備え、平常時には1日に2〜3回、自動運転によりスクリーン1全面の除塵運転を行う。
【0022】
移動式除塵機100は、走行車輪3を底面に例えば4つ備え、走行車輪3をレール4上で回転させることにより、スクリーン1の奥側端部から手前側端部までを移動する。走行車輪3は、操作室2内の駆動制御システム50により回転を制御される。
【0023】
スクリーン1の水面付近に堆積した落葉や流木等からなる塵芥5は、掻上装置の一例を構成するレーキ装置20によって掻き上げられる。レーキ装置20は、本体部20a、開閉可能なレーキ部20b及び車輪20cを有し、巻上用ワイヤーロープ22及び開口用ワイヤーロープ23により操作される。
【0024】
巻上用ワイヤーロープ22の一方の端部にはレーキ装置20の本体部20aが連結される。本体部20aは、巻上用ワイヤーロープ22の巻き上げ長さに応じて、スクリーン1表面を上下方向に移動する。本体部20aは、この例では鋼鉄等により構成された2つのコ型の部材が連結された形状になされ、スクリーン1と接する部位に車輪20cを有し、車輪20cをスクリーン1表面で回転させて移動する。
【0025】
本体部20aの2つのコ型の部材の内側には、レーキ部20bが係合され、掻上動作時に塵芥5を掻き込むように開閉される。レーキ部20bは、鋼鉄等により構成された爪部材を、大きな櫛形状に組み合わせて形成され、両端部に支点軸を有して本体部20aに係合される。レーキ部20bには、開口用ワイヤーロープ23の一方の端部が連結され、その巻き上げ長さに応じて、開閉を操作される。
【0026】
巻上用ワイヤーロープ22及び開口用ワイヤーロープ23は、それぞれ操作室2内の、図2に示す巻上用ドラム24及び開口用ドラム25にもう一方の端部を連結され、その回転に応じて巻き上げ長さを変えられる。巻上用ドラム24及び開口用ドラム25は、駆動制御システム50により回転を制御される。またこの例では、2本の巻上用ワイヤーロープ22が、本体部20aの両端部に連結される。これに伴い巻上用ドラム24も2つ設置され、互いに同期して回転するように制御される。
【0027】
塵芥5を掻き込んだレーキ装置20は、レーキ受アーム21へと導かれる。レーキ受アーム21は、巻き上げられたレーキ装置20を支持して傾け、レーキ装置20内の塵芥5を落下移送させる。レーキ受アーム21は、鋼鉄等により湾曲された棒状に形成され、下方の端部を操作室2の底面付近に連結され、この連結部を支点として操作室2側に傾くようになされる。
【0028】
レーキ受アーム21の上方の端部には嵌合部21aが形成される。嵌合部21aは、レーキ装置20の車輪20cを嵌合できる形状になされ、その嵌合部21aの所定の位置には、孔部21bが開口される。孔部21bには、本体部20aと巻上用ドラム24とを連結する巻上用ワイヤーロープ22が通される。レーキ受アーム21の下方の所定の位置には、搬送コンベア10が配置される。
【0029】
搬送コンベア10は、搬送装置の一例を構成し、載置場所、すなわち上述のレーキ装置20から塵芥5を受け取る場所から、所定の場所、例えば搬送コンベア10の先端部まで塵芥5を搬送するものである。搬送コンベア10の短手方向の両側面には、ホッパー30が設置される。
【0030】
ホッパー30は、操作室2側の導入板30aと、スクリーン1側の導入板30bにより構成され、塵芥装置20から落下する塵芥5を搬送コンベア10上に導くものである。導入板30a及び30bは、互いに上部が遠く、下部が近くなるように配置される。また、導入板30bの上端部には、エプロン31の上端部が連結される。
【0031】
エプロン31は、導入板30bの外側においてスクリーン1とほぼ同じ傾斜になされ、表面でレーキ装置20を上下移動させて、レーキ受アーム21の係合部に導く。従って、導入板30bとエプロン31は、互いに逆V字型に連結されるようになる。以上のようにして移動式除塵機100が構成される。以下で、移動式除塵機100の除塵運転時の動作例について簡単に説明をする。
【0032】
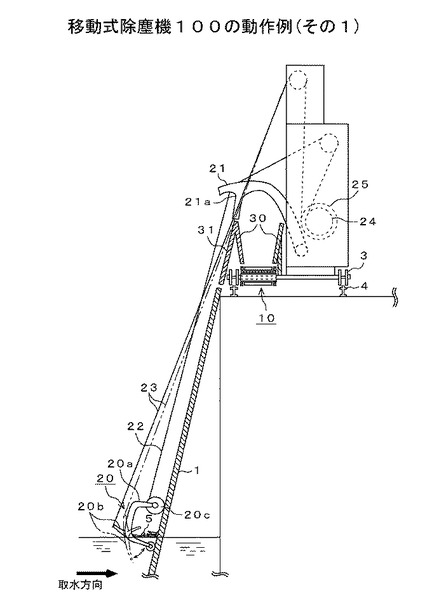
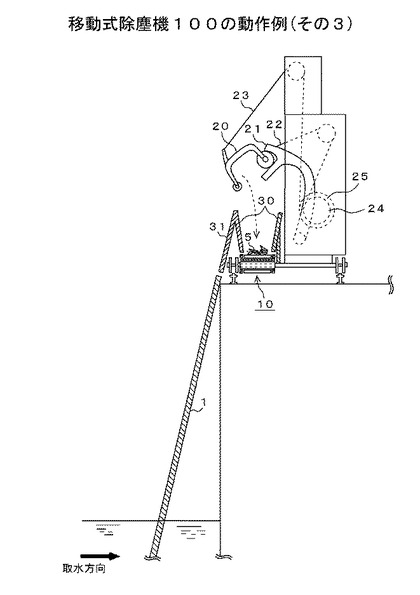
図2〜4は、移動式除塵機100の動作例(その1〜3)を示す図である。図2〜4に示す移動式除塵機100による除塵運転は、レーキ装置20により塵芥5を水面から掻き上げる掻上工程と、掻き上げられた塵芥5をレーキ装置20から搬送コンベア10に移送する落下移送工程と、搬送コンベア10に堆積された塵芥5を搬出する搬出工程とに分類され、以下、3つの場合に分けて説明をする。
【0033】
またここでは、移動式除塵機100が、スクリーン1の奥側端部に配置されている状態から除塵運転を開始し、手前側端部で除塵運転を終了する場合を例に挙げる。
【0034】
[掻上工程]
図2に示す掻上工程における移動式除塵機100では、まず、巻上用ワイヤーロープ22が緩められ、レーキ装置20が水面付近に降ろされる。この時、水面に達する手前で、開口用ワイヤーロープ23を引いてレーキ部20bを開口させてからレーキ装置20を降ろすようにするとよい。
【0035】
水面付近に降ろされたレーキ装置20では、図2に示す開口用ワイヤーロープ23が緩められ、レーキ部20bが閉じられる。こうしてレーキ装置20は水面付近の塵芥5を掻き込む。塵芥5を掻き込んだレーキ装置20は、その状態を保持するようにして、巻上用ワイヤーロープ22に引かれ、上方へと巻き上げられる。
【0036】
巻き上げられたレーキ装置20は、スクリーン1及びエプロン31の表面を通過して、レーキ受アーム21の端部に到達する。到達したレーキ装置20の車輪20cは、図3に示すように、レーキ受アーム21の嵌合部21aに嵌合されて固定される。なお、図3は、掻上工程におけるレーキ装置20の到達状態を示している。この例では、レーキ装置20が、巻上用ワイヤーロープ22の張力によりレーキ受アーム21に固定されている。
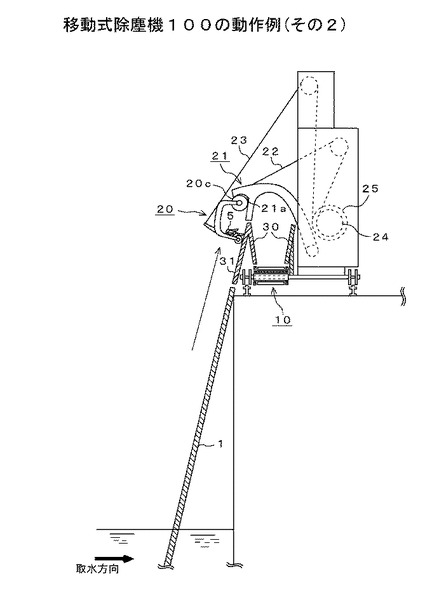
【0037】
[落下移送工程]
図4に示す落下移送工程では、レーキ装置20を固定したレーキ受アーム21が、巻上用ワイヤーロープ22に更に引かれることにより操作室2側に傾けられ、係合されたレーキ装置20を傾けるようになされる。傾けられたレーキ装置20内の塵芥5は、搬送コンベア10上に落下移送される。
【0038】
上述のようにして掻上工程及び落下移送工程を終了した移動式除塵機100では、レール4上を手前側に、この例ではレーキ装置20の幅と同じ距離であるL[m](図1参照)移動され、再度、掻上工程及び落下移送工程を行うように制御される。こうした工程を複数回繰り返して、スクリーン1の全面の塵芥5を掻き上げた移動式除塵機100は、レール4上の手前側端部へと到達するようになる。
【0039】
[搬出工程]
この例では、レール4の手前側端部には搬送コンテナ7が配置されており(図1参照)、搬出工程における移動式除塵機100では、レール4の端部で搬送コンベア10を駆動させて、搬送コンベア10から搬送コンテナ7への塵芥5の搬出動作を実行する。以上のようにして、移動式除塵機100による除塵運転が終了する。以下で、搬送コンベア10の構成例について詳しく説明をする。
【実施例1】
【0040】
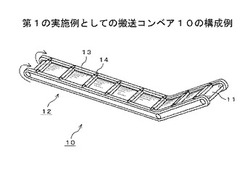
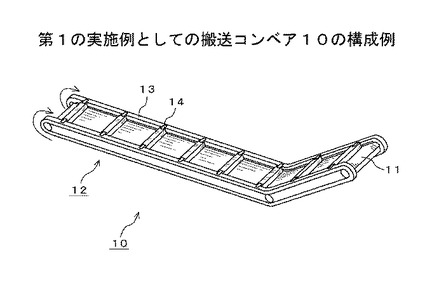
図5は、本発明に係る第1の実施例としての搬送コンベア10の構成例を示す斜視図である。図5に示す搬送コンベア10は、レーキ装置20から受け取った塵芥5を図1に示した搬送コンテナ7に搬送(搬出)するものである。
【0041】
搬送コンベア10は、底板11、梯子状コンベア12を備え、図1に示した導入板30aと30bとの間に配置される。またこの例で搬送コンベア10は、塵芥5を効率よく搬送コンテナ7に移す為、片方の端部(図5では右方の端部)が上方に傾斜するように形成されている。
【0042】
底板11は、搬送路の一例を構成し、レーキ装置20から塵芥5を受け取った載置場所から、搬送コンベア10の先端部に至る長さに形成される。底板11は、鋼鉄等により、例えば、幅1m、長さ8m程度の板状に形成される。
【0043】
底板11は、搬送コンベア10の上面において位置を固定される。すなわち底板11は、自らが回転移動することはなく、塵芥5を上面で滑らせて移動させる。底板11には、梯子状コンベア12が巻き付けられるように配置される。
【0044】
梯子状コンベア12は、無終端状の駆動手段の一例を構成し、底板11上の塵芥5をレーキ装置20から塵芥5を受け取った載置場所から、搬送コンベア10の先端部に移動させるものである。梯子状コンベア12は、コンベアチェーン13及びスクレーパ14を備え、底板11上の塵芥5を従動させて移動する。
【0045】
コンベアチェーン13は、底板11の短手方向の両端部に一本ずつ配置され、駆動制御システム50(図1参照)により駆動制御されて、底板11の周囲を回転移動する。コンベアチェーン13には、例えば、鋼鉄等で形成された無終端状のチェーンが用いられる。コンベアチェーン13には、所定の配置ピッチでスクレーパ14が複数個連結される(図6参照)。
【0046】
スクレーパ14は、搬送部の一例を構成し、コンベアチェーン13の回転移動に塵芥5を従動させるものである。スクレーパ14は、板鋼鉄により構成される四角状の管体になされる。ここで、四角状の管体とは、四角形の断面を仕切る外輪線が無終端状になされた管体を指すものとする。スクレーパ14は、2本のコンベアチェーン13に長手方向の両端部をそれぞれ連結されてコンベアチェーン13に従動する。
【0047】
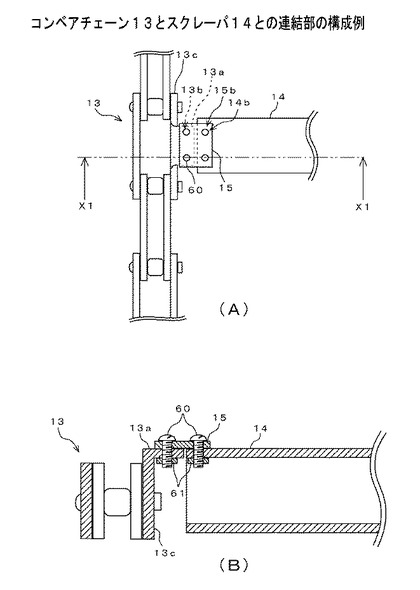
図6Aは、コンベアチェーン13とスクレーパ14との連結部の構成例を示す上面図である。図6Bは、図6Aに示すX1−X1矢視断面図である。
【0048】
図6A及びBに示すコンベアチェーン13には、所定の配置ピッチで、チェーン部材13cが配置されている。チェーン部材13cは、その上端部から直角に突出する固定部13aを有するものである。固定部13aには、連結用の孔部13bがこの例では2つ開口されている。
【0049】
固定部13aには、固定板15が連結される。固定板15は、鋼鉄等により四角形の板状に形成されている。固定部15には、連結用の孔部15bがこの例では4つ開口されている。孔部15bのうち2つは、孔部13bに径及びピッチを合わせて開口されていて、コンベアチェーン13と固定板15は、固定ネジ60及びナット61により互いに強固に連結される。
【0050】
固定板15に開口された、残り2つの孔部15bにはスクレーパ14が連結される。スクレーパ14の両端部の一平面には、孔部15bに係合する孔部14bが開口されていて、固定板15とスクレーパ14は、固定ネジ60及びナット61により連結される。このようにして、コンベアチェーン13とスクレーパ14とが連結されるようになる。
【0051】
またこの例では、固定板15を介して互いに連結させるようにしたが、これに限られることはなく、スクレーパ14の端部に、固定用の部位を突出させるように形成して、固定部13aと連結させるようにしてもよい。以上のようにして搬送コンベア10が構成される。
【0052】
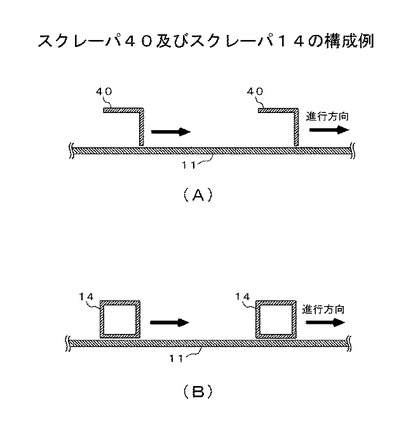
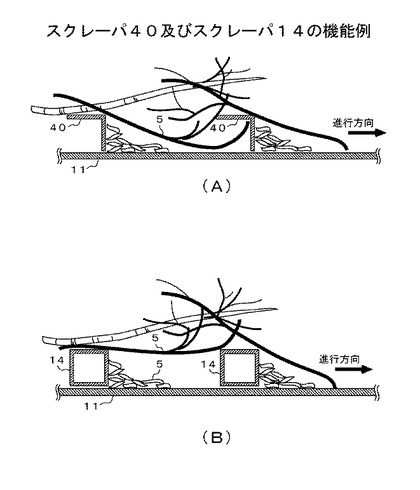
以下で、本発明に係るスクレーパ14と、従来例に係るスクレーパ40との構成及び機能について簡単に比較をする。図7A及びBは、スクレーパ40及びスクレーパ14の構成例を示す断面図である。図8A及びBは、スクレーパ40及びスクレーパ14の機能例を示す断面図である。
【0053】
図7A及び図8Aに示す従来方式のスクレーパ40は、逆L字型の断面形状を有するものである。スクレーパ40は、一方の面を上方に向けるとともに、他方の面を進行方向に向けるようにして底板11上を移動する。下方及び後方は開口されている。
【0054】
スクレーパ40を用いて塵芥5を従動させた場合、図8Aに示すように、下方及び後方の開口部に塵芥5、特に流木の端部が入り込むことがある。このような状態のままスクレーパ40が搬送コンベア10の端部に到達すると、端部における回転時にスクレーパ40が流木を噛み込んでしまい、塵芥5を搬送コンテナ7に移す際に、流木を上手く離せなくなるおそれがある。そのような場合は、噛み込まれた流木が搬送コンベア10の下方に回りこんでしまい、周辺装置に絡まったり、装置を破損したりするおそれがある。
【0055】
これを解消する為、図7B及び図8Bに示す本発明のスクレーパ14では、断面を仕切る外輪線が無終端状になされている。これにより、スクレーパ14を用いて塵芥5を従動させた場合、図8Bに示すように、塵芥5が下面に入り込みにくい。従って、底板11の端部において塵芥5を搬送コンテナ7に移す際にも、スムーズに塵芥5を離して搬送コンテナ7に移動させることができるようになる。以下で、移動式除塵機100を制御する駆動制御システム50について簡単に説明をする。
【0056】
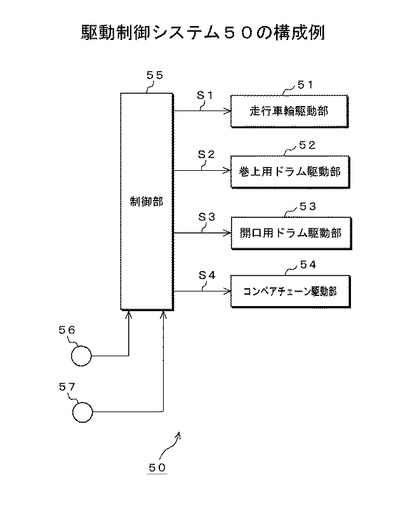
図9は、本発明に係る駆動制御システム50の構成例を示すブロック図である。図9に示す駆動制御システム50は、走行車輪駆動部51、巻上用ドラム駆動部52、開口用ドラム駆動部53、コンベアチェーン駆動部54、位置センサ56、積載センサ57及び制御部55を備え、操作室2内に配置されて移動式除塵機100の一連の除塵運転の駆動制御を行う。
【0057】
制御部55は、内部に記憶手段を備え、移動式除塵機100の除塵運転に関する駆動用プログラムを記憶する。制御部55は、作業者から起動命令を入力されること等により駆動用プログラムを起動し、各駆動部に適宜駆動用の制御信号S1〜S4を出力する。制御部55には、例えばコンピュータが使用される。
【0058】
また、制御部55に記憶される駆動用プログラムは、通常時、取水時等の各状態に応じて数種類用意されており、作業者等により選択されて起動される。なお、管理棟等の遠隔地から制御部55に起動命令を入力できるように、制御部55に通信機能を持たせるようにしてもよい。
【0059】
駆動用プログラムが起動されることにより、制御部55から出力された制御信号S1は、走行車輪駆動部51に入力される。走行車輪駆動部51には、例えば走行用サイクロ減速機が用いられ、制御信号S1に応じた回転動力を発生させる。走行車輪駆動部51は、走行車輪3の回転軸に接続され、制御信号S1に応じて移動式除塵機100を所定の場所に移動させる。
【0060】
制御部55から出力された制御信号S2は、巻上用ドラム駆動部52に入力される。巻上用ドラム駆動部52には、例えば巻上用サイクロ減速機が用いられる。巻上用ドラム駆動部52は、巻上用ドラム24の回転軸に接続され、制御信号S2に応じて巻上用ドラム24を回転させる。回転された巻上用ドラム24は、巻上用ワイヤーロープ22の長さを調節し、レーキ装置20の上下位置等を操作する。
【0061】
制御部55から出力された制御信号S3は、開口用ドラム駆動部53に入力される。開口用ドラム駆動部53には、例えば開口用サイクロ減速機が用いられる。開口用ドラム駆動部53は、開口用ドラム25の回転軸に接続され、制御信号S3に応じて開口用ドラム25を回転させる。回転された開口用ドラム25は、開口用ワイヤーロープ23の長さを調節し、レーキ装置20のレーキ部20bの開閉を操作する。
【0062】
制御部55から出力された制御信号S4は、コンベアチェーン駆動部54に入力される。コンベアチェーン駆動部54には、例えばコンベア駆動用サイクロ減速機が用いられる。コンベアチェーン駆動部54は、コンベアチェーン13の回転軸に接続され、制御信号S4に応じて搬送コンベア10による搬出動作を実行させる。
【0063】
自動除塵運転に必要な位置情報を得る為、制御部55には位置センサ56が接続されている。位置センサ56は、例えば操作室2の外壁に備えられ、レール4上における移動式除塵機100の位置情報を制御部55に出力する。位置センサ56には、例えば、走行車輪駆動部51に設けられたエンコーダが用いられる。
【0064】
同様にして制御部55には、積載センサ57が接続される。積載センサ57は、例えばホッパー30の上端部に備えられ、ホッパー30内の塵芥5の積載量を監視する。積載センサ57は、堆積した塵芥5がホッパー30の許容面に達したか否かを示す積載情報を制御部55に出力する。積載センサ57には、例えばCCDセンサが用いられる。このようにして駆動制御システム50が構成される。以下で、移動式除塵機100の一連の除塵運転方法について説明をする。
【0065】
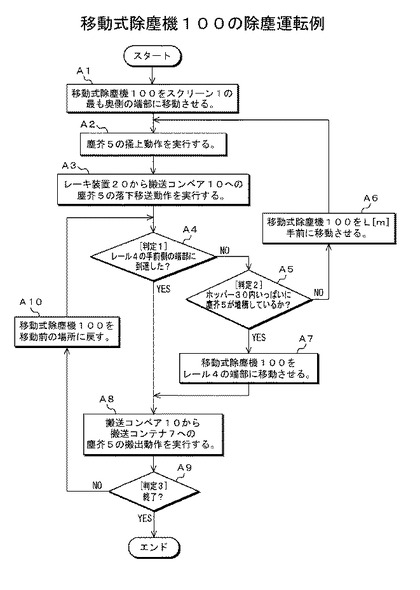
図10は、移動式除塵機100の除塵運転例を示すフローチャートである。移動式除塵機100では、本発明に係る搬送コンベア10(搬送装置)が応用され、この例ではスクリーン1の最も奥側の端部から順番に塵芥5を掻き上げ、徐々に手前側に移動するように制御される。また、移動式除塵機100の全ての動作は、駆動制御システム50により制御されるものとする。
【0066】
これらを前提条件にして、図10に示すフローチャートのステップA1で駆動制御システム50は、スクリーン1の最も奥の位置に移動式除塵機100を移動させる。駆動制御システム50は、走行車輪3をレール4上で回転させて、移動式除塵機100を移動する。
【0067】
ステップA2で駆動制御システム50は、まず1回目の掻上動作を実行する。駆動制御システム50は、巻上用ワイヤーロープ22及び開口用ワイヤーロープ23を操作し、レーキ装置20に、塵芥5を掻き上げさせる。この時の移動式除塵機100の動作例については図2〜3に係る記載を参考にされたい。
【0068】
次にステップA3で駆動制御システム50は、掻き上げられた塵芥5の落下移送動作を実行する。駆動制御システム50は、ワイヤーロープ22を更に引くことにより、レーキ受アーム21を傾けて、係合されるレーキ装置20を傾けさせ、塵芥5を落下移送させる。落下移送された塵芥5は、スクレーパ14等の上に落下する。また、この時の移動式除塵機100の動作例については、図4に係る記載を参照にされたい。
【0069】
落下移送動作が終了したら、ステップA4に進み、駆動制御システム50は、移動式除塵機100がスクリーン1の手前側の端部に到達したか否かの判定を行う(判定1)。この判定1は、位置センサ56が出力する位置情報を、制御部55が読み出し、レール4の端部の位置情報と比較することにより行う。またこの判定1は、上述の判定方法の他、所定回数の掻上動作がなされたか否かを制御部55が判定することにより行ってもよい。掻上動作の所定回数は、スクリーン1の横方向の長さL’を、レーキ装置20の横方向の長さLで除すことにより簡単に求めることができる(図1参照)。
【0070】
判定1の結果、まだレール4の端部に到達していない場合はステップA5に進み、到達した場合はステップA8に進む。ステップA8に進んだ場合、駆動制御システム50は、搬送コンベア10に堆積した塵芥5の搬出動作に入る。
【0071】
ステップA5に進んだ場合、駆動制御システム50は、掻上動作(ステップA2)及び落下移送動作(ステップA3)を継続可能か判断する為、ホッパー30内いっぱいに塵芥5が堆積しているか否かの判定を行う(判定2)。この判定2は、積載センサ57が出力する積載情報を、制御部55が読み出すことにより行う。積載センサ57は、例えば、塵芥5がホッパー30の許容面に達していない場合はLow信号を出力し、到達した場合はHigh信号を出力するように動作する。判定2の結果、積載センサ57がLow信号を出力していた場合は、ステップA6に進んで掻上動作及び落下移動動作を継続する。積載センサ57がHigh信号を出力していた場合は、塵芥5の搬出を行う為ステップA7に進む。ステップA7に進む場合は、その時点における移動式除塵機100の位置情報を制御部55の記憶手段に記憶しておくようにする。
【0072】
掻上動作及び落下移送動作を継続するべく、ステップA6に進んだ場合は、駆動制御システム50は、走行車輪3を回転させ、移動式除塵機100を手前側にL[m]移動させる。移動させたらステップA2に戻り、更に掻上動作及び落下移送動作を行う。
【0073】
搬出動作に進むべく、ステップA7に進んだ場合、駆動制御システム50は、走行車輪3を回転させ、移動式除塵機100をレール4の端部へと移動させる。レール4の端部に移動させたらステップA8に進む。
【0074】
ステップA8で駆動制御システム50は、搬送コンベア10から搬送コンテナ7への搬出動作を実行する。駆動制御システム50は、搬送コンベア10を駆動し、塵芥5を搬送コンテナ7に搬出する。この時、図7B及び図8Bに示したスクレーパ14による塵芥5の従動移送が行われる。搬出が終了したら、ステップA9に進む。
【0075】
ステップA9で駆動制御システム50は、スクリーン1全面における掻上動作が終了したか否かの判定を行う(判定3)。この判定3は、ステップA4における判定2において、YES/NOいずれの判定がなされたかを読み出すことにより、判定することができる。判定3の結果、判定2の判定結果がNOであった、すなわち、スクリーン1全面における掻上動作が終了していない場合は、ステップA10に進む。
【0076】
ステップA10に進んだ場合、駆動制御システム50は、移動式除塵機100をステップA5で記憶しておいた位置に戻す。移動式除塵機100を移動させたら、ステップA4に戻り、引き続き除塵運転を行う。
【0077】
ステップA9における判定3の結果、判定2の判定結果がYESであった、すなわち、スクリーン1の全面における掻上動作が終了した場合は、除塵運転を終了する。このようにして、移動式除塵機100による除塵運転を実行することができる。
【0078】
また、水力発電所の取水時において、移動式除塵機100による除塵運転を連続して行う必要がある場合は、移動式除塵機100は、更にステップA1からの一連の除塵運転を繰り返すように制御される。なお、平常時は、ここで除塵運転を一端終了するようになされる。
【0079】
このように第1の実施例に係る除塵機100の搬送コンベア10によれば、底板11上の塵芥5を、レーキ装置20から塵芥5を受け取った場所から搬送コンベア10の先端部まで移動する梯子状コンベア12に、塵芥5を従動させる四角状の管体になされたスクレーパ14が設けられるものである。
【0080】
この構成により、スクレーパ14の強度を向上できるので、塵芥5を従動させる機能を下げることなく、上方から落下する重量物によるスクレーパ14の損傷を防ぐことができる。また、下部の空間に塵芥5が入り込みにくいので、塵芥5の噛み込みを防ぐことができる。
【実施例2】
【0081】
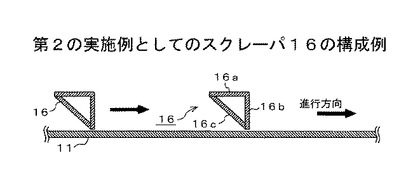
図11は、本発明に係る第2の実施例としてのスクレーパ16の構成例を示す断面図である。図11に示すスクレーパ16は、第1の実施例で説明したスクレーパ14と同様に、コンベアチェーン13に両端部を連結されて、底板11の塵芥5を従動させるものである。
【0082】
スクレーパ16は、この例では所定の厚みを有する上面16a、進行面16b、閉鎖面16cを備え、上面16a及び進行面16bをほぼ直角に連結させることにより生じる裏側の開口部を、閉鎖面16cにより閉じるようになされた、三角状の管体に形成される。
【0083】
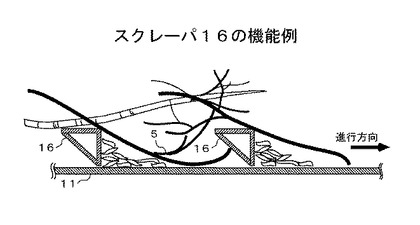
図12は、スクレーパ16の機能例を示す断面図である。スクレーパ16は、進行方向と反対の面及び下面を開口されていないので図7A及び図8Aに示した従来例に係るスクレーパ40に比べて下面に塵芥5が入り込みにくい。
【0084】
このように第2の実施例に係るスクレーパ16によれば、三角形の閉鎖された断面形状を有する三角状の管体をなすものである。この構成により、側面の強度を向上できるので、上方から落下する重量物によるスクレーパ16の損傷を最小限に防ぐことができる。また、下部の空間に塵芥5が入り込みにくいので、スクレーパ16による塵芥5の噛み込みを防ぐことができる。なお、閉鎖面16cを有することにより、対角線上の強度を向上できる。
【0085】
またこの例では、上面16a及び進行面16bを直角に形成するようにしたが、それに限られることはなく、例えば上面16aを、進行方向の端部が高くなるように傾斜させて形成してもよい。
【産業上の利用可能性】
【0086】
この発明は、ダム取水口のスクリーンに堆積する塵芥の除塵作業に適用して極めて好適である。
【図面の簡単な説明】
【0087】
【図1】移動式除塵機100の構成例を示す斜視図である。
【図2】移動式除塵機100の動作例(その1)を示す断面図である。
【図3】移動式除塵機100の動作例(その2)を示す断面図である。
【図4】移動式除塵機100の動作例(その3)を示す断面図である。
【図5】第1の実施例としての搬送コンベア10の構成例を示す斜視図である。
【図6】(A)及び(B)は、コンベアチェーン13とスクレーパ14との連結部の構成例を示す上面図及びX1−X1矢視断面図である。
【図7】(A)及び(B)は、スクレーパ40及びスクレーパ14の構成性を示す断面図である。
【図8】(A)及び(B)は、スクレーパ40及びスクレーパ14の機能例を示す断面図である。
【図9】駆動制御システム50の構成例を示すブロック図である。
【図10】移動式除塵機100の除塵運転例を示すフローチャートである。
【図11】第2の実施例としてのスクレーパ16の構成例を示す断面図である。
【図12】スクレーパ16の機能例を示す断面図である。
【符号の説明】
【0088】
1・・・スクリーン、2・・・操作室、3・・・走行車輪、4・・・レール、5・・・塵芥、7・・・搬送コンテナ、10・・・搬送コンベア、11・・・底板、12・・・梯子状コンベア、13・・・コンベアチェーン、14、16、40・・・スクレーパ、15・・・固定板、20・・・レーキ装置、21・・・レーキ受アーム、22・・・巻上用ワイヤーロープ、23・・・開口用ワイヤーロープ、24・・・巻上用ドラム、25・・・開口用ドラム、30・・・ホッパー、31・・・エプロン、50・・・駆動制御システム、51・・・走行車輪駆動部、52・・・巻上用ドラム駆動部、53・・・開口用ドラム駆動部、54・・・コンベアチェーン駆動部、55・・・制御部、56・・・位置センサ、57・・・積載センサ、60・・・固定ネジ、61・・・ナット、100・・・移動式除塵機
【技術分野】
【0001】
この発明は、ダム取水口のスクリーンに堆積する塵芥の自動除塵作業に適用可能な搬送装置及び除塵機に関する。
【0002】
詳しくは、スクリーンから掻き上げられた塵芥を搬送する為の搬送路に、その載置場所から所定の場所まで移動する無終端状の駆動手段を備え、この駆動手段に塵芥を従動させる為に設けられた搬送部の形状を工夫して、強度を向上できるようにするとともに、上方から落下する重量物による搬送部の損傷を防止できるようにしたものである。
【背景技術】
【0003】
従来、ダム及び河川等からの水を水力発電所に取り入れる取水口付近には、櫛形状に開口されたスクリーンと呼ばれる建造物が配置され、落葉や流木等の塵芥が施設内に入り込まないようにせき止めている。
【0004】
スクリーンの表面には、せき止められた塵芥が徐々に堆積するので、通常スクリーンの上部付近には除塵機が配置され、それらの塵芥を除去するように動作する。除塵機は、例えば、平常時には1日に2〜3回、取水時には常に、自動運転するように操作される。
【0005】
これらのスクリーン用の除塵機の多くは、レーキと呼ばれる熊手型の掻上装置により、水面の塵芥を掻き上げ、掻き上げられた塵芥を搬送コンベアにより搬送(搬出)するように構成されている。
【0006】
塵芥を搬送する搬送コンベアは、例えば、搬送路を構成する底板と、底板の短手方向の両端部に配置される2つの駆動用のコンベアチェーンと、2つのコンベアチェーンに両端部を連結された、搬送部とを備え、レーキの可動域上端部の下方付近に配置される。このように搬送コンベアを配置することにより、上方のレーキからの塵芥を、自然落下させて搬送コンベアに移すことができるようになる。また、これらの搬送コンベアにおいて、駆動用のコンベアチェーンに連結され、塵芥を従動させる搬送部には、軽量化の為、例えばL字型の断面形状を有する山形綱が使用されていることが多い。
【0007】
なお、これに関連して特許文献1に示すような除塵機が開示されている。この除塵機によれば、スクリーンの上部に配置された除塵機の架台に、スクリーン上端の延長上に位置して該スクリーンと略同傾斜角度の前面エプロンが設けられるとともに、前面エプロンの下手側に位置してゴミ受けトラフ又はゴミ受兼搬出コンベアが設けられる。
【0008】
また、上述の架台上には、除塵機架構が立設され、該架構にレーキアームが昇降する多段式除塵手段と、レーキが自動降下するワイヤーロープ式除塵手段をスクリーンに沿って併設し、各レーキを格別の駆動手段により、それぞれ別個の運転しうるようにしたものである。このように構成することにより、スクリーンに流着する種々雑多な塵芥の質、量に対応して、除塵装置を選択使用することができるというものである。
【0009】
【特許文献1】特開平7−197433号公報(第3頁、図1)
【発明の開示】
【発明が解決しようとする課題】
【0010】
しかし、従来例に係る除塵機によれば、塵芥を従動させる搬送コンベアの搬送部に、例えば山形綱(アングル)を使用するものである。搬送部に使用された山形綱は、一方の面を上方に、他方の面を進行方向に向け、逆L字型になるようにしてコンベアチェーンに連結される。
【0011】
従って、上方から塵芥が落下して移送される時、落下した塵芥に当たった搬送部が衝撃を充分に吸収できずに変形するおそれがある。また、底板に乗せられた塵芥を搬送する時、搬送部の開口された下部に塵芥が入り込み、例えば端部での回転時に、搬送部が塵芥を噛み込んでしまい、搬送コンベアの搬送が止まったり、搬送部が変形するおそれがある。なお、特許文献1に示す除塵機においても、同様の問題が想定される。
【0012】
そこで本発明は、上述の問題に鑑み創作されたものであり、搬送部の形状を工夫し、上方から搬送コンベアに落下する重量物が搬送部に当たった時に、搬送部が損傷するのを防ぐとともに、搬送部による塵芥の噛み込みを最小限に抑えられるようにした搬送装置及び除塵機を提供することを目的とする。
【課題を解決するための手段】
【0013】
この発明に係る搬送装置は、物体を載置場所から所定の場所まで搬送する搬送装置において、載置場所から所定の場所に至る搬送路と、搬送路上の物体を、載置場所から所定の場所まで移動する無終端状の駆動手段とを備え、駆動手段には、物体を従動させる多角形の断面形状を有した搬送部が設けられることを特徴とするものである。
【0014】
この発明に係る搬送装置によれば、搬送路上の物体を、無終端状の駆動手段に従動させる搬送部が、多角形の断面形状を有するものである。従って、搬送部の強度を向上できるので、上方から落下する重量物による搬送部の損傷を防ぐことができる。また、従来方式の逆L字型の搬送部に比べて、下部の空間に物体が入り込みにくいので、当該搬送部による物体の噛み込みを防ぐことができる。
【0015】
この発明に係る除塵機は、水面に浮遊する塵芥を掻き上げる掻上装置と、掻上装置により掻き上げられた塵芥を上面に載せられ、上面に載せられた塵芥を、載置場所から所定の場所まで搬送する搬送装置とを備える除塵機において、搬送装置は、載置場所から所定の場所に至る搬送路と、搬送路上の塵芥を、載置場所から所定の場所まで移動する無終端状の駆動手段とを備え、駆動手段には、塵芥を従動させる多角形の断面形状を有した搬送部が設けられることを特徴とするものである。
【0016】
この発明に係る除塵機によれば、本発明に係る搬送装置が応用されている。従って、搬送部の強度を向上できるので、上方から落下する重量物による搬送部の損傷を防ぐことができる。また、下部の空間に塵芥が入り込みにくいので、搬送部による塵芥の噛み込みを防ぐことができる。
【発明の効果】
【0017】
この発明に係る搬送装置によれば、搬送路上の物体を、載置場所から所定の場所まで移動する無終端状の駆動手段に、物体を従動させる多角形の断面形状を有した搬送部が設けられるものである。この構成により、搬送部の強度を向上できるので、物体を従動させる機能を下げることなく、上方から落下する重量物による搬送部の損傷を防ぐことができる。これにより、当該搬送装置を除塵機に充分応用できる。
【0018】
この発明に係る除塵機によれば、本発明に係る搬送装置を備えるものである。この構成により、搬送部の強度を向上できるので、塵芥を従動させる機能を下げることなく、上方から落下する重量物による搬送部の損傷を防ぐことができる。
【発明を実施するための最良の形態】
【0019】
続いて、この発明に係る実施の形態としての搬送装置及び除塵機について、図面を参照しながら説明をする。図1は、本発明に係る実施の形態としての移動式除塵機100の構成例を示す斜視図である。図1に示す移動式除塵機100は、本発明の搬送装置を応用した除塵機の一例を構成し、水力発電所取水口のスクリーン1に堆積した塵芥を除去するものである。
【0020】
移動式除塵機100が設置されるダム構築物は、所定形状を有した堰堤部を備え、堰堤部の上部は平面上の基礎スラブ8を成す。基礎スラブ8の下部には、貯水池から水力発電所施設内への取水路が複数開口されており、基礎スラブ8の貯水池側には、取水路の開口部を覆うようにして、スクリーン1が設置されている。スクリーン1は、貯水池の底面から基礎スラブ8平面に架けて傾斜されて設置されている。基礎スラブ8上には、レール4がスクリーン1の横方向に平行に引かれている。レール4は、スクリーン1の幅とほぼ同等な長さを有し、移動式除塵機100の移動路を構成する。
【0021】
移動式除塵機100は、図1,2に示すように操作室2、走行車輪3、レーキ装置20、レーキ受アーム21、巻上用ワイヤーロープ22、開口用ワイヤーロープ23、巻上用ドラム24、開口用ドラム25、ホッパー30、エプロン31、搬送コンベア10及び駆動制御システム50を備え、平常時には1日に2〜3回、自動運転によりスクリーン1全面の除塵運転を行う。
【0022】
移動式除塵機100は、走行車輪3を底面に例えば4つ備え、走行車輪3をレール4上で回転させることにより、スクリーン1の奥側端部から手前側端部までを移動する。走行車輪3は、操作室2内の駆動制御システム50により回転を制御される。
【0023】
スクリーン1の水面付近に堆積した落葉や流木等からなる塵芥5は、掻上装置の一例を構成するレーキ装置20によって掻き上げられる。レーキ装置20は、本体部20a、開閉可能なレーキ部20b及び車輪20cを有し、巻上用ワイヤーロープ22及び開口用ワイヤーロープ23により操作される。
【0024】
巻上用ワイヤーロープ22の一方の端部にはレーキ装置20の本体部20aが連結される。本体部20aは、巻上用ワイヤーロープ22の巻き上げ長さに応じて、スクリーン1表面を上下方向に移動する。本体部20aは、この例では鋼鉄等により構成された2つのコ型の部材が連結された形状になされ、スクリーン1と接する部位に車輪20cを有し、車輪20cをスクリーン1表面で回転させて移動する。
【0025】
本体部20aの2つのコ型の部材の内側には、レーキ部20bが係合され、掻上動作時に塵芥5を掻き込むように開閉される。レーキ部20bは、鋼鉄等により構成された爪部材を、大きな櫛形状に組み合わせて形成され、両端部に支点軸を有して本体部20aに係合される。レーキ部20bには、開口用ワイヤーロープ23の一方の端部が連結され、その巻き上げ長さに応じて、開閉を操作される。
【0026】
巻上用ワイヤーロープ22及び開口用ワイヤーロープ23は、それぞれ操作室2内の、図2に示す巻上用ドラム24及び開口用ドラム25にもう一方の端部を連結され、その回転に応じて巻き上げ長さを変えられる。巻上用ドラム24及び開口用ドラム25は、駆動制御システム50により回転を制御される。またこの例では、2本の巻上用ワイヤーロープ22が、本体部20aの両端部に連結される。これに伴い巻上用ドラム24も2つ設置され、互いに同期して回転するように制御される。
【0027】
塵芥5を掻き込んだレーキ装置20は、レーキ受アーム21へと導かれる。レーキ受アーム21は、巻き上げられたレーキ装置20を支持して傾け、レーキ装置20内の塵芥5を落下移送させる。レーキ受アーム21は、鋼鉄等により湾曲された棒状に形成され、下方の端部を操作室2の底面付近に連結され、この連結部を支点として操作室2側に傾くようになされる。
【0028】
レーキ受アーム21の上方の端部には嵌合部21aが形成される。嵌合部21aは、レーキ装置20の車輪20cを嵌合できる形状になされ、その嵌合部21aの所定の位置には、孔部21bが開口される。孔部21bには、本体部20aと巻上用ドラム24とを連結する巻上用ワイヤーロープ22が通される。レーキ受アーム21の下方の所定の位置には、搬送コンベア10が配置される。
【0029】
搬送コンベア10は、搬送装置の一例を構成し、載置場所、すなわち上述のレーキ装置20から塵芥5を受け取る場所から、所定の場所、例えば搬送コンベア10の先端部まで塵芥5を搬送するものである。搬送コンベア10の短手方向の両側面には、ホッパー30が設置される。
【0030】
ホッパー30は、操作室2側の導入板30aと、スクリーン1側の導入板30bにより構成され、塵芥装置20から落下する塵芥5を搬送コンベア10上に導くものである。導入板30a及び30bは、互いに上部が遠く、下部が近くなるように配置される。また、導入板30bの上端部には、エプロン31の上端部が連結される。
【0031】
エプロン31は、導入板30bの外側においてスクリーン1とほぼ同じ傾斜になされ、表面でレーキ装置20を上下移動させて、レーキ受アーム21の係合部に導く。従って、導入板30bとエプロン31は、互いに逆V字型に連結されるようになる。以上のようにして移動式除塵機100が構成される。以下で、移動式除塵機100の除塵運転時の動作例について簡単に説明をする。
【0032】
図2〜4は、移動式除塵機100の動作例(その1〜3)を示す図である。図2〜4に示す移動式除塵機100による除塵運転は、レーキ装置20により塵芥5を水面から掻き上げる掻上工程と、掻き上げられた塵芥5をレーキ装置20から搬送コンベア10に移送する落下移送工程と、搬送コンベア10に堆積された塵芥5を搬出する搬出工程とに分類され、以下、3つの場合に分けて説明をする。
【0033】
またここでは、移動式除塵機100が、スクリーン1の奥側端部に配置されている状態から除塵運転を開始し、手前側端部で除塵運転を終了する場合を例に挙げる。
【0034】
[掻上工程]
図2に示す掻上工程における移動式除塵機100では、まず、巻上用ワイヤーロープ22が緩められ、レーキ装置20が水面付近に降ろされる。この時、水面に達する手前で、開口用ワイヤーロープ23を引いてレーキ部20bを開口させてからレーキ装置20を降ろすようにするとよい。
【0035】
水面付近に降ろされたレーキ装置20では、図2に示す開口用ワイヤーロープ23が緩められ、レーキ部20bが閉じられる。こうしてレーキ装置20は水面付近の塵芥5を掻き込む。塵芥5を掻き込んだレーキ装置20は、その状態を保持するようにして、巻上用ワイヤーロープ22に引かれ、上方へと巻き上げられる。
【0036】
巻き上げられたレーキ装置20は、スクリーン1及びエプロン31の表面を通過して、レーキ受アーム21の端部に到達する。到達したレーキ装置20の車輪20cは、図3に示すように、レーキ受アーム21の嵌合部21aに嵌合されて固定される。なお、図3は、掻上工程におけるレーキ装置20の到達状態を示している。この例では、レーキ装置20が、巻上用ワイヤーロープ22の張力によりレーキ受アーム21に固定されている。
【0037】
[落下移送工程]
図4に示す落下移送工程では、レーキ装置20を固定したレーキ受アーム21が、巻上用ワイヤーロープ22に更に引かれることにより操作室2側に傾けられ、係合されたレーキ装置20を傾けるようになされる。傾けられたレーキ装置20内の塵芥5は、搬送コンベア10上に落下移送される。
【0038】
上述のようにして掻上工程及び落下移送工程を終了した移動式除塵機100では、レール4上を手前側に、この例ではレーキ装置20の幅と同じ距離であるL[m](図1参照)移動され、再度、掻上工程及び落下移送工程を行うように制御される。こうした工程を複数回繰り返して、スクリーン1の全面の塵芥5を掻き上げた移動式除塵機100は、レール4上の手前側端部へと到達するようになる。
【0039】
[搬出工程]
この例では、レール4の手前側端部には搬送コンテナ7が配置されており(図1参照)、搬出工程における移動式除塵機100では、レール4の端部で搬送コンベア10を駆動させて、搬送コンベア10から搬送コンテナ7への塵芥5の搬出動作を実行する。以上のようにして、移動式除塵機100による除塵運転が終了する。以下で、搬送コンベア10の構成例について詳しく説明をする。
【実施例1】
【0040】
図5は、本発明に係る第1の実施例としての搬送コンベア10の構成例を示す斜視図である。図5に示す搬送コンベア10は、レーキ装置20から受け取った塵芥5を図1に示した搬送コンテナ7に搬送(搬出)するものである。
【0041】
搬送コンベア10は、底板11、梯子状コンベア12を備え、図1に示した導入板30aと30bとの間に配置される。またこの例で搬送コンベア10は、塵芥5を効率よく搬送コンテナ7に移す為、片方の端部(図5では右方の端部)が上方に傾斜するように形成されている。
【0042】
底板11は、搬送路の一例を構成し、レーキ装置20から塵芥5を受け取った載置場所から、搬送コンベア10の先端部に至る長さに形成される。底板11は、鋼鉄等により、例えば、幅1m、長さ8m程度の板状に形成される。
【0043】
底板11は、搬送コンベア10の上面において位置を固定される。すなわち底板11は、自らが回転移動することはなく、塵芥5を上面で滑らせて移動させる。底板11には、梯子状コンベア12が巻き付けられるように配置される。
【0044】
梯子状コンベア12は、無終端状の駆動手段の一例を構成し、底板11上の塵芥5をレーキ装置20から塵芥5を受け取った載置場所から、搬送コンベア10の先端部に移動させるものである。梯子状コンベア12は、コンベアチェーン13及びスクレーパ14を備え、底板11上の塵芥5を従動させて移動する。
【0045】
コンベアチェーン13は、底板11の短手方向の両端部に一本ずつ配置され、駆動制御システム50(図1参照)により駆動制御されて、底板11の周囲を回転移動する。コンベアチェーン13には、例えば、鋼鉄等で形成された無終端状のチェーンが用いられる。コンベアチェーン13には、所定の配置ピッチでスクレーパ14が複数個連結される(図6参照)。
【0046】
スクレーパ14は、搬送部の一例を構成し、コンベアチェーン13の回転移動に塵芥5を従動させるものである。スクレーパ14は、板鋼鉄により構成される四角状の管体になされる。ここで、四角状の管体とは、四角形の断面を仕切る外輪線が無終端状になされた管体を指すものとする。スクレーパ14は、2本のコンベアチェーン13に長手方向の両端部をそれぞれ連結されてコンベアチェーン13に従動する。
【0047】
図6Aは、コンベアチェーン13とスクレーパ14との連結部の構成例を示す上面図である。図6Bは、図6Aに示すX1−X1矢視断面図である。
【0048】
図6A及びBに示すコンベアチェーン13には、所定の配置ピッチで、チェーン部材13cが配置されている。チェーン部材13cは、その上端部から直角に突出する固定部13aを有するものである。固定部13aには、連結用の孔部13bがこの例では2つ開口されている。
【0049】
固定部13aには、固定板15が連結される。固定板15は、鋼鉄等により四角形の板状に形成されている。固定部15には、連結用の孔部15bがこの例では4つ開口されている。孔部15bのうち2つは、孔部13bに径及びピッチを合わせて開口されていて、コンベアチェーン13と固定板15は、固定ネジ60及びナット61により互いに強固に連結される。
【0050】
固定板15に開口された、残り2つの孔部15bにはスクレーパ14が連結される。スクレーパ14の両端部の一平面には、孔部15bに係合する孔部14bが開口されていて、固定板15とスクレーパ14は、固定ネジ60及びナット61により連結される。このようにして、コンベアチェーン13とスクレーパ14とが連結されるようになる。
【0051】
またこの例では、固定板15を介して互いに連結させるようにしたが、これに限られることはなく、スクレーパ14の端部に、固定用の部位を突出させるように形成して、固定部13aと連結させるようにしてもよい。以上のようにして搬送コンベア10が構成される。
【0052】
以下で、本発明に係るスクレーパ14と、従来例に係るスクレーパ40との構成及び機能について簡単に比較をする。図7A及びBは、スクレーパ40及びスクレーパ14の構成例を示す断面図である。図8A及びBは、スクレーパ40及びスクレーパ14の機能例を示す断面図である。
【0053】
図7A及び図8Aに示す従来方式のスクレーパ40は、逆L字型の断面形状を有するものである。スクレーパ40は、一方の面を上方に向けるとともに、他方の面を進行方向に向けるようにして底板11上を移動する。下方及び後方は開口されている。
【0054】
スクレーパ40を用いて塵芥5を従動させた場合、図8Aに示すように、下方及び後方の開口部に塵芥5、特に流木の端部が入り込むことがある。このような状態のままスクレーパ40が搬送コンベア10の端部に到達すると、端部における回転時にスクレーパ40が流木を噛み込んでしまい、塵芥5を搬送コンテナ7に移す際に、流木を上手く離せなくなるおそれがある。そのような場合は、噛み込まれた流木が搬送コンベア10の下方に回りこんでしまい、周辺装置に絡まったり、装置を破損したりするおそれがある。
【0055】
これを解消する為、図7B及び図8Bに示す本発明のスクレーパ14では、断面を仕切る外輪線が無終端状になされている。これにより、スクレーパ14を用いて塵芥5を従動させた場合、図8Bに示すように、塵芥5が下面に入り込みにくい。従って、底板11の端部において塵芥5を搬送コンテナ7に移す際にも、スムーズに塵芥5を離して搬送コンテナ7に移動させることができるようになる。以下で、移動式除塵機100を制御する駆動制御システム50について簡単に説明をする。
【0056】
図9は、本発明に係る駆動制御システム50の構成例を示すブロック図である。図9に示す駆動制御システム50は、走行車輪駆動部51、巻上用ドラム駆動部52、開口用ドラム駆動部53、コンベアチェーン駆動部54、位置センサ56、積載センサ57及び制御部55を備え、操作室2内に配置されて移動式除塵機100の一連の除塵運転の駆動制御を行う。
【0057】
制御部55は、内部に記憶手段を備え、移動式除塵機100の除塵運転に関する駆動用プログラムを記憶する。制御部55は、作業者から起動命令を入力されること等により駆動用プログラムを起動し、各駆動部に適宜駆動用の制御信号S1〜S4を出力する。制御部55には、例えばコンピュータが使用される。
【0058】
また、制御部55に記憶される駆動用プログラムは、通常時、取水時等の各状態に応じて数種類用意されており、作業者等により選択されて起動される。なお、管理棟等の遠隔地から制御部55に起動命令を入力できるように、制御部55に通信機能を持たせるようにしてもよい。
【0059】
駆動用プログラムが起動されることにより、制御部55から出力された制御信号S1は、走行車輪駆動部51に入力される。走行車輪駆動部51には、例えば走行用サイクロ減速機が用いられ、制御信号S1に応じた回転動力を発生させる。走行車輪駆動部51は、走行車輪3の回転軸に接続され、制御信号S1に応じて移動式除塵機100を所定の場所に移動させる。
【0060】
制御部55から出力された制御信号S2は、巻上用ドラム駆動部52に入力される。巻上用ドラム駆動部52には、例えば巻上用サイクロ減速機が用いられる。巻上用ドラム駆動部52は、巻上用ドラム24の回転軸に接続され、制御信号S2に応じて巻上用ドラム24を回転させる。回転された巻上用ドラム24は、巻上用ワイヤーロープ22の長さを調節し、レーキ装置20の上下位置等を操作する。
【0061】
制御部55から出力された制御信号S3は、開口用ドラム駆動部53に入力される。開口用ドラム駆動部53には、例えば開口用サイクロ減速機が用いられる。開口用ドラム駆動部53は、開口用ドラム25の回転軸に接続され、制御信号S3に応じて開口用ドラム25を回転させる。回転された開口用ドラム25は、開口用ワイヤーロープ23の長さを調節し、レーキ装置20のレーキ部20bの開閉を操作する。
【0062】
制御部55から出力された制御信号S4は、コンベアチェーン駆動部54に入力される。コンベアチェーン駆動部54には、例えばコンベア駆動用サイクロ減速機が用いられる。コンベアチェーン駆動部54は、コンベアチェーン13の回転軸に接続され、制御信号S4に応じて搬送コンベア10による搬出動作を実行させる。
【0063】
自動除塵運転に必要な位置情報を得る為、制御部55には位置センサ56が接続されている。位置センサ56は、例えば操作室2の外壁に備えられ、レール4上における移動式除塵機100の位置情報を制御部55に出力する。位置センサ56には、例えば、走行車輪駆動部51に設けられたエンコーダが用いられる。
【0064】
同様にして制御部55には、積載センサ57が接続される。積載センサ57は、例えばホッパー30の上端部に備えられ、ホッパー30内の塵芥5の積載量を監視する。積載センサ57は、堆積した塵芥5がホッパー30の許容面に達したか否かを示す積載情報を制御部55に出力する。積載センサ57には、例えばCCDセンサが用いられる。このようにして駆動制御システム50が構成される。以下で、移動式除塵機100の一連の除塵運転方法について説明をする。
【0065】
図10は、移動式除塵機100の除塵運転例を示すフローチャートである。移動式除塵機100では、本発明に係る搬送コンベア10(搬送装置)が応用され、この例ではスクリーン1の最も奥側の端部から順番に塵芥5を掻き上げ、徐々に手前側に移動するように制御される。また、移動式除塵機100の全ての動作は、駆動制御システム50により制御されるものとする。
【0066】
これらを前提条件にして、図10に示すフローチャートのステップA1で駆動制御システム50は、スクリーン1の最も奥の位置に移動式除塵機100を移動させる。駆動制御システム50は、走行車輪3をレール4上で回転させて、移動式除塵機100を移動する。
【0067】
ステップA2で駆動制御システム50は、まず1回目の掻上動作を実行する。駆動制御システム50は、巻上用ワイヤーロープ22及び開口用ワイヤーロープ23を操作し、レーキ装置20に、塵芥5を掻き上げさせる。この時の移動式除塵機100の動作例については図2〜3に係る記載を参考にされたい。
【0068】
次にステップA3で駆動制御システム50は、掻き上げられた塵芥5の落下移送動作を実行する。駆動制御システム50は、ワイヤーロープ22を更に引くことにより、レーキ受アーム21を傾けて、係合されるレーキ装置20を傾けさせ、塵芥5を落下移送させる。落下移送された塵芥5は、スクレーパ14等の上に落下する。また、この時の移動式除塵機100の動作例については、図4に係る記載を参照にされたい。
【0069】
落下移送動作が終了したら、ステップA4に進み、駆動制御システム50は、移動式除塵機100がスクリーン1の手前側の端部に到達したか否かの判定を行う(判定1)。この判定1は、位置センサ56が出力する位置情報を、制御部55が読み出し、レール4の端部の位置情報と比較することにより行う。またこの判定1は、上述の判定方法の他、所定回数の掻上動作がなされたか否かを制御部55が判定することにより行ってもよい。掻上動作の所定回数は、スクリーン1の横方向の長さL’を、レーキ装置20の横方向の長さLで除すことにより簡単に求めることができる(図1参照)。
【0070】
判定1の結果、まだレール4の端部に到達していない場合はステップA5に進み、到達した場合はステップA8に進む。ステップA8に進んだ場合、駆動制御システム50は、搬送コンベア10に堆積した塵芥5の搬出動作に入る。
【0071】
ステップA5に進んだ場合、駆動制御システム50は、掻上動作(ステップA2)及び落下移送動作(ステップA3)を継続可能か判断する為、ホッパー30内いっぱいに塵芥5が堆積しているか否かの判定を行う(判定2)。この判定2は、積載センサ57が出力する積載情報を、制御部55が読み出すことにより行う。積載センサ57は、例えば、塵芥5がホッパー30の許容面に達していない場合はLow信号を出力し、到達した場合はHigh信号を出力するように動作する。判定2の結果、積載センサ57がLow信号を出力していた場合は、ステップA6に進んで掻上動作及び落下移動動作を継続する。積載センサ57がHigh信号を出力していた場合は、塵芥5の搬出を行う為ステップA7に進む。ステップA7に進む場合は、その時点における移動式除塵機100の位置情報を制御部55の記憶手段に記憶しておくようにする。
【0072】
掻上動作及び落下移送動作を継続するべく、ステップA6に進んだ場合は、駆動制御システム50は、走行車輪3を回転させ、移動式除塵機100を手前側にL[m]移動させる。移動させたらステップA2に戻り、更に掻上動作及び落下移送動作を行う。
【0073】
搬出動作に進むべく、ステップA7に進んだ場合、駆動制御システム50は、走行車輪3を回転させ、移動式除塵機100をレール4の端部へと移動させる。レール4の端部に移動させたらステップA8に進む。
【0074】
ステップA8で駆動制御システム50は、搬送コンベア10から搬送コンテナ7への搬出動作を実行する。駆動制御システム50は、搬送コンベア10を駆動し、塵芥5を搬送コンテナ7に搬出する。この時、図7B及び図8Bに示したスクレーパ14による塵芥5の従動移送が行われる。搬出が終了したら、ステップA9に進む。
【0075】
ステップA9で駆動制御システム50は、スクリーン1全面における掻上動作が終了したか否かの判定を行う(判定3)。この判定3は、ステップA4における判定2において、YES/NOいずれの判定がなされたかを読み出すことにより、判定することができる。判定3の結果、判定2の判定結果がNOであった、すなわち、スクリーン1全面における掻上動作が終了していない場合は、ステップA10に進む。
【0076】
ステップA10に進んだ場合、駆動制御システム50は、移動式除塵機100をステップA5で記憶しておいた位置に戻す。移動式除塵機100を移動させたら、ステップA4に戻り、引き続き除塵運転を行う。
【0077】
ステップA9における判定3の結果、判定2の判定結果がYESであった、すなわち、スクリーン1の全面における掻上動作が終了した場合は、除塵運転を終了する。このようにして、移動式除塵機100による除塵運転を実行することができる。
【0078】
また、水力発電所の取水時において、移動式除塵機100による除塵運転を連続して行う必要がある場合は、移動式除塵機100は、更にステップA1からの一連の除塵運転を繰り返すように制御される。なお、平常時は、ここで除塵運転を一端終了するようになされる。
【0079】
このように第1の実施例に係る除塵機100の搬送コンベア10によれば、底板11上の塵芥5を、レーキ装置20から塵芥5を受け取った場所から搬送コンベア10の先端部まで移動する梯子状コンベア12に、塵芥5を従動させる四角状の管体になされたスクレーパ14が設けられるものである。
【0080】
この構成により、スクレーパ14の強度を向上できるので、塵芥5を従動させる機能を下げることなく、上方から落下する重量物によるスクレーパ14の損傷を防ぐことができる。また、下部の空間に塵芥5が入り込みにくいので、塵芥5の噛み込みを防ぐことができる。
【実施例2】
【0081】
図11は、本発明に係る第2の実施例としてのスクレーパ16の構成例を示す断面図である。図11に示すスクレーパ16は、第1の実施例で説明したスクレーパ14と同様に、コンベアチェーン13に両端部を連結されて、底板11の塵芥5を従動させるものである。
【0082】
スクレーパ16は、この例では所定の厚みを有する上面16a、進行面16b、閉鎖面16cを備え、上面16a及び進行面16bをほぼ直角に連結させることにより生じる裏側の開口部を、閉鎖面16cにより閉じるようになされた、三角状の管体に形成される。
【0083】
図12は、スクレーパ16の機能例を示す断面図である。スクレーパ16は、進行方向と反対の面及び下面を開口されていないので図7A及び図8Aに示した従来例に係るスクレーパ40に比べて下面に塵芥5が入り込みにくい。
【0084】
このように第2の実施例に係るスクレーパ16によれば、三角形の閉鎖された断面形状を有する三角状の管体をなすものである。この構成により、側面の強度を向上できるので、上方から落下する重量物によるスクレーパ16の損傷を最小限に防ぐことができる。また、下部の空間に塵芥5が入り込みにくいので、スクレーパ16による塵芥5の噛み込みを防ぐことができる。なお、閉鎖面16cを有することにより、対角線上の強度を向上できる。
【0085】
またこの例では、上面16a及び進行面16bを直角に形成するようにしたが、それに限られることはなく、例えば上面16aを、進行方向の端部が高くなるように傾斜させて形成してもよい。
【産業上の利用可能性】
【0086】
この発明は、ダム取水口のスクリーンに堆積する塵芥の除塵作業に適用して極めて好適である。
【図面の簡単な説明】
【0087】
【図1】移動式除塵機100の構成例を示す斜視図である。
【図2】移動式除塵機100の動作例(その1)を示す断面図である。
【図3】移動式除塵機100の動作例(その2)を示す断面図である。
【図4】移動式除塵機100の動作例(その3)を示す断面図である。
【図5】第1の実施例としての搬送コンベア10の構成例を示す斜視図である。
【図6】(A)及び(B)は、コンベアチェーン13とスクレーパ14との連結部の構成例を示す上面図及びX1−X1矢視断面図である。
【図7】(A)及び(B)は、スクレーパ40及びスクレーパ14の構成性を示す断面図である。
【図8】(A)及び(B)は、スクレーパ40及びスクレーパ14の機能例を示す断面図である。
【図9】駆動制御システム50の構成例を示すブロック図である。
【図10】移動式除塵機100の除塵運転例を示すフローチャートである。
【図11】第2の実施例としてのスクレーパ16の構成例を示す断面図である。
【図12】スクレーパ16の機能例を示す断面図である。
【符号の説明】
【0088】
1・・・スクリーン、2・・・操作室、3・・・走行車輪、4・・・レール、5・・・塵芥、7・・・搬送コンテナ、10・・・搬送コンベア、11・・・底板、12・・・梯子状コンベア、13・・・コンベアチェーン、14、16、40・・・スクレーパ、15・・・固定板、20・・・レーキ装置、21・・・レーキ受アーム、22・・・巻上用ワイヤーロープ、23・・・開口用ワイヤーロープ、24・・・巻上用ドラム、25・・・開口用ドラム、30・・・ホッパー、31・・・エプロン、50・・・駆動制御システム、51・・・走行車輪駆動部、52・・・巻上用ドラム駆動部、53・・・開口用ドラム駆動部、54・・・コンベアチェーン駆動部、55・・・制御部、56・・・位置センサ、57・・・積載センサ、60・・・固定ネジ、61・・・ナット、100・・・移動式除塵機
【特許請求の範囲】
【請求項1】
物体を載置場所から所定の場所まで搬送する搬送装置において、
前記載置場所から所定の場所に至る搬送路と、
前記搬送路上の物体を、前記載置場所から所定の場所まで移動する無終端状の駆動手段とを備え、
前記駆動手段には、前記物体を従動させる多角形の断面形状を有した搬送部が設けられることを特徴とする搬送装置。
【請求項2】
水面に浮遊する塵芥を掻き上げる掻上装置と、
前記掻上装置により掻き上げられた前記塵芥を上面に載せられ、
上面に載せられた前記塵芥を、載置場所から所定の場所まで搬送する搬送装置とを備える除塵機において、
前記搬送装置は、
前記載置場所から所定の場所に至る搬送路と、
前記搬送路上の塵芥を、前記載置場所から所定の場所まで移動する無終端状の駆動手段とを備え、
前記駆動手段には、前記塵芥を従動させる多角形の断面形状を有した搬送部が設けられることを特徴とする除塵機。
【請求項3】
前記搬送部は、
三角状又は四角状の管体をなすことを特徴とする請求項2に記載の除塵機。
【請求項1】
物体を載置場所から所定の場所まで搬送する搬送装置において、
前記載置場所から所定の場所に至る搬送路と、
前記搬送路上の物体を、前記載置場所から所定の場所まで移動する無終端状の駆動手段とを備え、
前記駆動手段には、前記物体を従動させる多角形の断面形状を有した搬送部が設けられることを特徴とする搬送装置。
【請求項2】
水面に浮遊する塵芥を掻き上げる掻上装置と、
前記掻上装置により掻き上げられた前記塵芥を上面に載せられ、
上面に載せられた前記塵芥を、載置場所から所定の場所まで搬送する搬送装置とを備える除塵機において、
前記搬送装置は、
前記載置場所から所定の場所に至る搬送路と、
前記搬送路上の塵芥を、前記載置場所から所定の場所まで移動する無終端状の駆動手段とを備え、
前記駆動手段には、前記塵芥を従動させる多角形の断面形状を有した搬送部が設けられることを特徴とする除塵機。
【請求項3】
前記搬送部は、
三角状又は四角状の管体をなすことを特徴とする請求項2に記載の除塵機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2008−184262(P2008−184262A)
【公開日】平成20年8月14日(2008.8.14)
【国際特許分類】
【出願番号】特願2007−18437(P2007−18437)
【出願日】平成19年1月29日(2007.1.29)
【出願人】(000211307)中国電力株式会社 (6,505)
【Fターム(参考)】
【公開日】平成20年8月14日(2008.8.14)
【国際特許分類】
【出願日】平成19年1月29日(2007.1.29)
【出願人】(000211307)中国電力株式会社 (6,505)
【Fターム(参考)】
[ Back to top ]