
搬送装置
【課題】プリント基板の搬送途中の位置ずれを防止しつつ高速かつ正確に搬送可能とする。
【解決手段】ベルト搬送装置10は、プリント基板12を下方から支持する第1の搬送ベルト13と、プリント基板12をその搬送方向と略直交する左右一対の端面に当接支持する第2の搬送ベルト14と、第1の搬送ベルト13と第2の搬送ベルト14を、伝動機構15を介して略同一の速度で駆動する伝動モータ25とを備えている。
【解決手段】ベルト搬送装置10は、プリント基板12を下方から支持する第1の搬送ベルト13と、プリント基板12をその搬送方向と略直交する左右一対の端面に当接支持する第2の搬送ベルト14と、第1の搬送ベルト13と第2の搬送ベルト14を、伝動機構15を介して略同一の速度で駆動する伝動モータ25とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、工場内に設置された搬送手段にて基板を支持して搬送する搬送装置に関する。
【背景技術】
【0002】
電子部品をプリント基板に実装する電子部品実装装置や、実装済みのプリント基板を組み付ける自動組立装置等の電子部品実装ラインにおいては、プリント基板はベルトコンベア等のベルト搬送装置により所定のラインに沿って搬送される。このようなベルト搬送装置においては、生産効率をアップするために、ベルト搬送装置を高速で駆動し、かつ迅速に電子部品を実装等することが要請されている。この場合、単にベルト搬送装置の搬送速度をアップするだけでは、静止状態からの加速時や停止時等にベルトとプリント基板との間に滑りが発生してしまい、プリント基板に位置ずれが生じて部品実装が困難となってしまう。
【0003】
これに対処すべく、従来、例えば特許文献1には、プリント基板の四辺の端面に、夫々辺の全長に沿った溝を形成し、互いに平行な一対の溝に、搬送用ローラを係合させてプリント基板を支持し、搬送する点が開示されている。この従来技術によれば、プリント基板の端面のみを支持して搬送するので、プリント基板の部品実装領域を広く確保することができるというものである。
【0004】
また、特許文献2には、搬送ベルトとして、帯状体の下面に第1の突部を突設し、上面に第2の突部を突設して構成した点が開示されている。そして、この搬送ベルトを、支持フレームのガイド部と押え板との間を摺動させると共に、第1の突部はガイド部の上面に形成されたガイド溝内を摺動し、第2の突部は、押え板の切欠部に嵌合して摺動するようにする。このとき、プリント基板は、その側端部を帯状体に載せられて搬送されるが、プリント基板の側端部が帯状体と押え板の隙間に入り込もうとすると、第2の突部により阻止される。
【特許文献1】特開平11−220292号公報(第3頁、図1)
【特許文献2】特開平11−289192号公報(第3頁、図3)
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかし、特許文献1に開示された従来技術では、プリント基板の四辺の端面に夫々辺の全長に沿った溝を形成しなければならず、プリント基板の製造コストが増大する。また、薄いプリント基板に適用するのは困難である。更に、高速でプリント基板を搬送する場合や、プリント基板静止から加速動作時、或いは高速搬送から減速動作時等にプリント基板に滑りが発生するおそれがあった。
【0006】
また、特許文献2に開示された従来技術では、搬送ベルトに第1の突部と第2の突部を突設しているため、製造コストが増大する。また、第2の突部はプリント基板の搬送には寄与していないので、特許文献1と同様に、高速でプリント基板を搬送する場合や、プリント基板静止から加速動作時、或いは高速搬送から減速動作時等にプリント基板に滑りが発生するおそれがある。
【0007】
本発明は、斯かる課題を解決するためになされたもので、その目的とするところは、基板の板厚にかかわらず、該基板の搬送途中の位置ずれを防止しつつ高速かつ正確に搬送することのできる搬送装置を提供することにある。
【課題を解決するための手段】
【0008】
前記目的を達成するため、請求項1に係る発明は、基板を下方から支持する第1の搬送部材と、
前記基板をその搬送方向と略直交する一対の端面に当接支持する第2の搬送部材と、
前記第1の搬送部材と前記第2の搬送部材を、伝動機構を介して略同一の速度で駆動する駆動手段と、を備えていることを特徴とする。
【0009】
請求項2に係る発明は、請求項1に記載の搬送装置において、
前記伝動機構は、
前記駆動手段の動力を伝達する駆動プーリ、該駆動プーリの動力を伝達する回転伝達体、該回転伝達体の動力を前記第1の搬送部材に伝達する第1の従動プーリと、
前記駆動プーリの動力を前記第2の搬送部材に伝達する第2の従動プーリと、を備えている、ことを特徴とする。
【0010】
請求項3に係る発明は、請求項2に記載の搬送装置において、
前記第1の従動プーリと前記第2の従動プーリの周速度を略同一とした、ことを特徴とする。
【0011】
請求項4に係る発明は、請求項1乃至3のいずれかに記載の搬送装置において、
前記第1の搬送部材と前記第2の搬送部材は、搬送ベルトである、ことを特徴とする。
請求項5に係る発明は、請求項1乃至4のいずれかに記載の搬送装置において、
前記駆動手段は電動モータである、ことを特徴とする。
【発明の効果】
【0012】
本発明によれば、第1と第2の搬送部材により基板を下方と一対の端面で支持し、この第1と第2の搬送部材を、駆動手段により伝動機構を介して略同一の速度で駆動するようにしたことで、基板の板厚にかかわらず、該基板の搬送途中の位置ずれを防止しつつ高速かつ正確に搬送することができる。
【発明を実施するための最良の形態】
【0013】
以下、図面に基づき本発明の実施の形態を説明する。
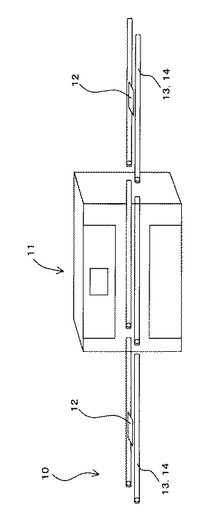
図1は、本発明に係る搬送装置を有する搬送ラインの一例を示している。
工場内に設置された搬送ラインは、プリント基板12の搬送方向に沿って敷設されたベルト搬送装置10と、その中途部の所定位置に配設されたマウント部(部品実装部)11とを有している。このマウント部11において、搬入されてきたプリント基板12に、例えばトランジスタやコンデンサ等のチップ状の電子部品が実装される。
【0014】
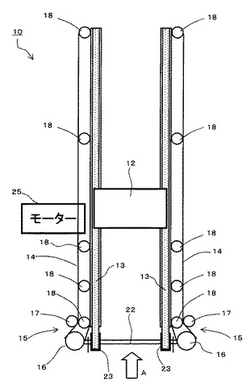
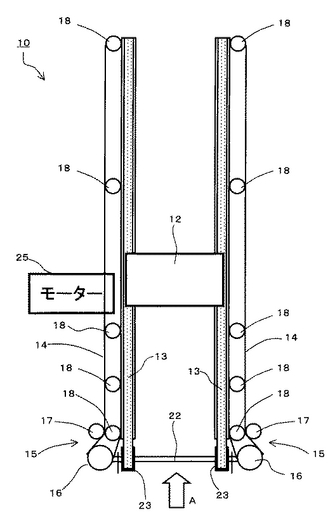
図2及び図3に示すように、ベルト搬送装置10は、プリント基板12を下方から支持する第1の搬送ベルト(第1の搬送部材)13と、プリント基板12をその搬送方向(矢印A方向)と略直交する一対の端面(図の左右端面)に当接支持する第2の搬送ベルト(第2の搬送部材)14と、該第1と第2の搬送ベルト13、14を、伝動機構15を介して略同一の周速度で駆動する電動モータ(駆動手段)25とを備えている。
【0015】
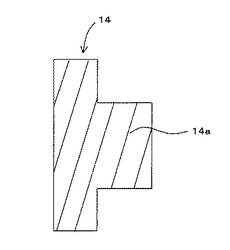
本実施の形態では、第1の搬送ベルト13の材質は、従来から用いられているゴム等が用いられるが、第2の搬送ベルト14は、厚みのある軟らかいゴム等が使用され、図4に示すように、取付け状態において一部がプリント基板12側に突出する突部14aを有する断面凸形状に形成されている。この突部14aは、第2の搬送ベルト14の長手方向に沿って連続して設けても良いし、等間隔で多数設けても良い。そして、搬送時には、この突部14aをプリント基板12の一対の端面(図の左右端面)に接触するようにする。
【0016】
伝動機構15は、電動モータ25の動力を第1の搬送ベルト13に伝達する機構と、第2の搬送ベルト14に伝達する機構とに分岐されている。
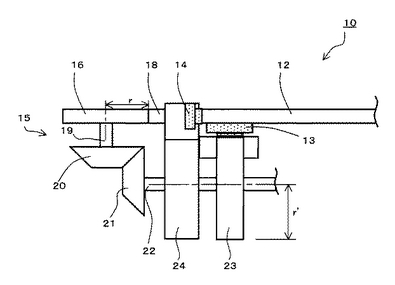
第1の搬送ベルト13に伝達する機構は、電動モータ25の動力を伝達する駆動プーリ16と、該駆動プーリ16に軸19で一体固定されたベベルギヤ(回転伝達体)20と,該ベベルギヤ20に噛み合うベベルギヤ(回転伝達体)21と、該ベベルギヤ21にシャフト22を介して連結された第1の従動プーリ23とを有する。そして、この第1の従動プーリ23の回転により、該第1の従動プーリ23に巻回された第1の搬送ベルト13が駆動される。前記シャフト22は、例えばスプライン軸が用いられている。これは、例えばベベルギヤ21をシャフト22の軸方向に調節可能として、プリント基板12の幅に応じて調整できるようにするためである。
【0017】
また、第2の搬送ベルト14を駆動する機構は、前述した駆動プーリ16と、この駆動プーリ16の動力を第2の搬送ベルト14に伝達する多数の第2の従動プーリ18とを有し、これら駆動プーリ16と第2の従動プーリ18との間に第2の搬送ベルト14が巻回されている。この第2の搬送ベルト14は、搬送始端側の第2の従動プーリ18に押圧プーリ17が押圧されていて、第2の搬送ベルト14は、この押圧プーリ17によって第2の従動プーリ18側に圧接されている。
【0018】
更に、図2で明らかなように、プリント基板12が搬送装置にスムーズに搬入され易いように、駆動プーリ16は、搬送始端側の第2の従動プーリ18に対し、外側(搬送方向と直交する方向の外側)に傾斜して配置されている。なお、図3の符号24は、第1の搬送ベルト13と第2の搬送ベルト14、伝動機構15等を支持する支持フレームである。
【0019】
また、駆動プーリ16は、プリント基板12の幅方向に所定間隔を隔てて対向配置された第2の搬送ベルト14,14のそれぞれの側に配置されていて、電動モータ25の動力を第2の搬送ベルト14,14のそれぞれに伝達している。なお、本実施の形態では、第2の搬送ベルト14の断面形状として、プリント基板12の幅方向の両端面に当接できるように、断面凸形状とした場合について説明したが、これに限らず、普通の平ベルトとしても良い。
【0020】
ここで、本実施の形態の特徴的なことは、電動モータ25の動力を、伝達機構15を介して第1と第2の搬送ベルト13、14を略同一の速度で駆動するようにした点にある。すなわち、プリント基板12を下方及び幅方向の両端面の3方向から支持し、この支持したプリント基板12を、第1と第2の搬送ベルト13、14で図2の矢印A方向に高速かつ正確に搬送可能とした。その為には、支持したプリント基板12が搬送途中で位置ずれしないように、第1と第2の搬送ベルト13、14の速度を略同一にする必要がある。
【0021】
しかして、図3において、例えば駆動プーリ16の角速度をω、半径をrとし、2つのベベルギヤ20、21として例えば同一のもの(歯数とピッチ円が同一)を使用し、かつ第1の従動プーリ23の半径をr'とすると、第1の搬送ベルト13を駆動する第1の従動プーリ23の周速度Vは、V=r'・ωとなる。一方、第2の搬送ベルト14を直接的に駆動する駆動プーリ16の周速度V'は、V'=r・ωである。そして、この周速度V'が、そのまま第2の従動プーリ18に伝達されて、第2の搬送ベルト14の搬送速度となる。
【0022】
この場合、第2の搬送ベルト14と第2の従動プーリ18との間に滑りが生じないように、押圧プーリ17を適宜の付勢圧で第2の従動プーリ18側に圧接する必要がある。滑りがあると、駆動プーリ16の周速度V'が第2の搬送ベルト14に正確に伝達されないからである。
【0023】
よって、第1の搬送ベルト13の速度Vと、第2の搬送ベルト14の速度V'が同一(V=V')であるためには、r=r'であれば良い。また、2つのベベルギヤ20、21のギヤ比を変えたい場合は、駆動プーリ16の半径rと第1の従動プーリ23の半径r'もそれに応じて変えれば良い。更に、本実施の形態では、1個の電動モータ25で第1と第2の搬送ベルト13、14を駆動する場合について説明したが、これに限らず、例えば2個の電動モータ25、25を用い、第1と第2の搬送ベルト13、14を別々に駆動しても良く、この場合は、これら2個の電動モータ25、25を同期制御するようにする。
【0024】
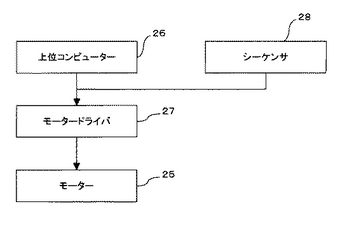
図5は、本実施の形態の制御ブロック図を示している。
同図において、工場内の部品実装ラインの全体の制御を担っている上位コンピュータ26からの制御に基づき、モータドライバ27を介して電動モータ25が駆動制御される。この電動モータ25が駆動されると、駆動プーリ16が回転駆動され、伝達機構15を介して第1の搬送ベルト13と第2の搬送ベルト14がそれぞれ同方向(図2のA方向)に駆動される。なお、このときの電動モータ25の始動、停止等の細かな駆動タイミングは、シーケンサ28からの制御によって詳細に行われる。
【0025】
このとき、前述したように、伝達機構15のプーリ比やギヤ比を適宜選定することで、第1の搬送ベルト13と第2の搬送ベルト14の周速度を略同一とすることができる。これにより、プリント基板12は、第1の搬送ベルト13で下方から支持され、かつ第2の搬送ベルト14で幅方向の両端面が当接支持されるので、しっかりと支持される。よって、搬送途中で、第1と第2の搬送ベルト13、14の周速度を静止状態から急加速したり、急停止したりして大幅に変化させたとしても、プリント基板12がスリップしたり位置ずれするおそれがない。従って、本実施の形態によれば、プリント基板12の板厚にかかわらず該プリント基板12を高速かつ正確に搬送することができる。
【図面の簡単な説明】
【0026】
【図1】搬送ラインの一例を示す図である。
【図2】ベルト搬送装置の平面図である。
【図3】同上の正面図である。
【図4】第2の搬送ベルトの断面図である。
【図5】本実施の形態の制御ブロックを示す図である。
【符号の説明】
【0027】
10 ベルト搬送装置
12 プリント基板
13 第1の搬送ベルト
14 第2の搬送ベルト
15 伝達機構
16 駆動プーリ
18 第2の従動プーリ
23 第1の従動プーリ
25 電動モータ
【技術分野】
【0001】
本発明は、工場内に設置された搬送手段にて基板を支持して搬送する搬送装置に関する。
【背景技術】
【0002】
電子部品をプリント基板に実装する電子部品実装装置や、実装済みのプリント基板を組み付ける自動組立装置等の電子部品実装ラインにおいては、プリント基板はベルトコンベア等のベルト搬送装置により所定のラインに沿って搬送される。このようなベルト搬送装置においては、生産効率をアップするために、ベルト搬送装置を高速で駆動し、かつ迅速に電子部品を実装等することが要請されている。この場合、単にベルト搬送装置の搬送速度をアップするだけでは、静止状態からの加速時や停止時等にベルトとプリント基板との間に滑りが発生してしまい、プリント基板に位置ずれが生じて部品実装が困難となってしまう。
【0003】
これに対処すべく、従来、例えば特許文献1には、プリント基板の四辺の端面に、夫々辺の全長に沿った溝を形成し、互いに平行な一対の溝に、搬送用ローラを係合させてプリント基板を支持し、搬送する点が開示されている。この従来技術によれば、プリント基板の端面のみを支持して搬送するので、プリント基板の部品実装領域を広く確保することができるというものである。
【0004】
また、特許文献2には、搬送ベルトとして、帯状体の下面に第1の突部を突設し、上面に第2の突部を突設して構成した点が開示されている。そして、この搬送ベルトを、支持フレームのガイド部と押え板との間を摺動させると共に、第1の突部はガイド部の上面に形成されたガイド溝内を摺動し、第2の突部は、押え板の切欠部に嵌合して摺動するようにする。このとき、プリント基板は、その側端部を帯状体に載せられて搬送されるが、プリント基板の側端部が帯状体と押え板の隙間に入り込もうとすると、第2の突部により阻止される。
【特許文献1】特開平11−220292号公報(第3頁、図1)
【特許文献2】特開平11−289192号公報(第3頁、図3)
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかし、特許文献1に開示された従来技術では、プリント基板の四辺の端面に夫々辺の全長に沿った溝を形成しなければならず、プリント基板の製造コストが増大する。また、薄いプリント基板に適用するのは困難である。更に、高速でプリント基板を搬送する場合や、プリント基板静止から加速動作時、或いは高速搬送から減速動作時等にプリント基板に滑りが発生するおそれがあった。
【0006】
また、特許文献2に開示された従来技術では、搬送ベルトに第1の突部と第2の突部を突設しているため、製造コストが増大する。また、第2の突部はプリント基板の搬送には寄与していないので、特許文献1と同様に、高速でプリント基板を搬送する場合や、プリント基板静止から加速動作時、或いは高速搬送から減速動作時等にプリント基板に滑りが発生するおそれがある。
【0007】
本発明は、斯かる課題を解決するためになされたもので、その目的とするところは、基板の板厚にかかわらず、該基板の搬送途中の位置ずれを防止しつつ高速かつ正確に搬送することのできる搬送装置を提供することにある。
【課題を解決するための手段】
【0008】
前記目的を達成するため、請求項1に係る発明は、基板を下方から支持する第1の搬送部材と、
前記基板をその搬送方向と略直交する一対の端面に当接支持する第2の搬送部材と、
前記第1の搬送部材と前記第2の搬送部材を、伝動機構を介して略同一の速度で駆動する駆動手段と、を備えていることを特徴とする。
【0009】
請求項2に係る発明は、請求項1に記載の搬送装置において、
前記伝動機構は、
前記駆動手段の動力を伝達する駆動プーリ、該駆動プーリの動力を伝達する回転伝達体、該回転伝達体の動力を前記第1の搬送部材に伝達する第1の従動プーリと、
前記駆動プーリの動力を前記第2の搬送部材に伝達する第2の従動プーリと、を備えている、ことを特徴とする。
【0010】
請求項3に係る発明は、請求項2に記載の搬送装置において、
前記第1の従動プーリと前記第2の従動プーリの周速度を略同一とした、ことを特徴とする。
【0011】
請求項4に係る発明は、請求項1乃至3のいずれかに記載の搬送装置において、
前記第1の搬送部材と前記第2の搬送部材は、搬送ベルトである、ことを特徴とする。
請求項5に係る発明は、請求項1乃至4のいずれかに記載の搬送装置において、
前記駆動手段は電動モータである、ことを特徴とする。
【発明の効果】
【0012】
本発明によれば、第1と第2の搬送部材により基板を下方と一対の端面で支持し、この第1と第2の搬送部材を、駆動手段により伝動機構を介して略同一の速度で駆動するようにしたことで、基板の板厚にかかわらず、該基板の搬送途中の位置ずれを防止しつつ高速かつ正確に搬送することができる。
【発明を実施するための最良の形態】
【0013】
以下、図面に基づき本発明の実施の形態を説明する。
図1は、本発明に係る搬送装置を有する搬送ラインの一例を示している。
工場内に設置された搬送ラインは、プリント基板12の搬送方向に沿って敷設されたベルト搬送装置10と、その中途部の所定位置に配設されたマウント部(部品実装部)11とを有している。このマウント部11において、搬入されてきたプリント基板12に、例えばトランジスタやコンデンサ等のチップ状の電子部品が実装される。
【0014】
図2及び図3に示すように、ベルト搬送装置10は、プリント基板12を下方から支持する第1の搬送ベルト(第1の搬送部材)13と、プリント基板12をその搬送方向(矢印A方向)と略直交する一対の端面(図の左右端面)に当接支持する第2の搬送ベルト(第2の搬送部材)14と、該第1と第2の搬送ベルト13、14を、伝動機構15を介して略同一の周速度で駆動する電動モータ(駆動手段)25とを備えている。
【0015】
本実施の形態では、第1の搬送ベルト13の材質は、従来から用いられているゴム等が用いられるが、第2の搬送ベルト14は、厚みのある軟らかいゴム等が使用され、図4に示すように、取付け状態において一部がプリント基板12側に突出する突部14aを有する断面凸形状に形成されている。この突部14aは、第2の搬送ベルト14の長手方向に沿って連続して設けても良いし、等間隔で多数設けても良い。そして、搬送時には、この突部14aをプリント基板12の一対の端面(図の左右端面)に接触するようにする。
【0016】
伝動機構15は、電動モータ25の動力を第1の搬送ベルト13に伝達する機構と、第2の搬送ベルト14に伝達する機構とに分岐されている。
第1の搬送ベルト13に伝達する機構は、電動モータ25の動力を伝達する駆動プーリ16と、該駆動プーリ16に軸19で一体固定されたベベルギヤ(回転伝達体)20と,該ベベルギヤ20に噛み合うベベルギヤ(回転伝達体)21と、該ベベルギヤ21にシャフト22を介して連結された第1の従動プーリ23とを有する。そして、この第1の従動プーリ23の回転により、該第1の従動プーリ23に巻回された第1の搬送ベルト13が駆動される。前記シャフト22は、例えばスプライン軸が用いられている。これは、例えばベベルギヤ21をシャフト22の軸方向に調節可能として、プリント基板12の幅に応じて調整できるようにするためである。
【0017】
また、第2の搬送ベルト14を駆動する機構は、前述した駆動プーリ16と、この駆動プーリ16の動力を第2の搬送ベルト14に伝達する多数の第2の従動プーリ18とを有し、これら駆動プーリ16と第2の従動プーリ18との間に第2の搬送ベルト14が巻回されている。この第2の搬送ベルト14は、搬送始端側の第2の従動プーリ18に押圧プーリ17が押圧されていて、第2の搬送ベルト14は、この押圧プーリ17によって第2の従動プーリ18側に圧接されている。
【0018】
更に、図2で明らかなように、プリント基板12が搬送装置にスムーズに搬入され易いように、駆動プーリ16は、搬送始端側の第2の従動プーリ18に対し、外側(搬送方向と直交する方向の外側)に傾斜して配置されている。なお、図3の符号24は、第1の搬送ベルト13と第2の搬送ベルト14、伝動機構15等を支持する支持フレームである。
【0019】
また、駆動プーリ16は、プリント基板12の幅方向に所定間隔を隔てて対向配置された第2の搬送ベルト14,14のそれぞれの側に配置されていて、電動モータ25の動力を第2の搬送ベルト14,14のそれぞれに伝達している。なお、本実施の形態では、第2の搬送ベルト14の断面形状として、プリント基板12の幅方向の両端面に当接できるように、断面凸形状とした場合について説明したが、これに限らず、普通の平ベルトとしても良い。
【0020】
ここで、本実施の形態の特徴的なことは、電動モータ25の動力を、伝達機構15を介して第1と第2の搬送ベルト13、14を略同一の速度で駆動するようにした点にある。すなわち、プリント基板12を下方及び幅方向の両端面の3方向から支持し、この支持したプリント基板12を、第1と第2の搬送ベルト13、14で図2の矢印A方向に高速かつ正確に搬送可能とした。その為には、支持したプリント基板12が搬送途中で位置ずれしないように、第1と第2の搬送ベルト13、14の速度を略同一にする必要がある。
【0021】
しかして、図3において、例えば駆動プーリ16の角速度をω、半径をrとし、2つのベベルギヤ20、21として例えば同一のもの(歯数とピッチ円が同一)を使用し、かつ第1の従動プーリ23の半径をr'とすると、第1の搬送ベルト13を駆動する第1の従動プーリ23の周速度Vは、V=r'・ωとなる。一方、第2の搬送ベルト14を直接的に駆動する駆動プーリ16の周速度V'は、V'=r・ωである。そして、この周速度V'が、そのまま第2の従動プーリ18に伝達されて、第2の搬送ベルト14の搬送速度となる。
【0022】
この場合、第2の搬送ベルト14と第2の従動プーリ18との間に滑りが生じないように、押圧プーリ17を適宜の付勢圧で第2の従動プーリ18側に圧接する必要がある。滑りがあると、駆動プーリ16の周速度V'が第2の搬送ベルト14に正確に伝達されないからである。
【0023】
よって、第1の搬送ベルト13の速度Vと、第2の搬送ベルト14の速度V'が同一(V=V')であるためには、r=r'であれば良い。また、2つのベベルギヤ20、21のギヤ比を変えたい場合は、駆動プーリ16の半径rと第1の従動プーリ23の半径r'もそれに応じて変えれば良い。更に、本実施の形態では、1個の電動モータ25で第1と第2の搬送ベルト13、14を駆動する場合について説明したが、これに限らず、例えば2個の電動モータ25、25を用い、第1と第2の搬送ベルト13、14を別々に駆動しても良く、この場合は、これら2個の電動モータ25、25を同期制御するようにする。
【0024】
図5は、本実施の形態の制御ブロック図を示している。
同図において、工場内の部品実装ラインの全体の制御を担っている上位コンピュータ26からの制御に基づき、モータドライバ27を介して電動モータ25が駆動制御される。この電動モータ25が駆動されると、駆動プーリ16が回転駆動され、伝達機構15を介して第1の搬送ベルト13と第2の搬送ベルト14がそれぞれ同方向(図2のA方向)に駆動される。なお、このときの電動モータ25の始動、停止等の細かな駆動タイミングは、シーケンサ28からの制御によって詳細に行われる。
【0025】
このとき、前述したように、伝達機構15のプーリ比やギヤ比を適宜選定することで、第1の搬送ベルト13と第2の搬送ベルト14の周速度を略同一とすることができる。これにより、プリント基板12は、第1の搬送ベルト13で下方から支持され、かつ第2の搬送ベルト14で幅方向の両端面が当接支持されるので、しっかりと支持される。よって、搬送途中で、第1と第2の搬送ベルト13、14の周速度を静止状態から急加速したり、急停止したりして大幅に変化させたとしても、プリント基板12がスリップしたり位置ずれするおそれがない。従って、本実施の形態によれば、プリント基板12の板厚にかかわらず該プリント基板12を高速かつ正確に搬送することができる。
【図面の簡単な説明】
【0026】
【図1】搬送ラインの一例を示す図である。
【図2】ベルト搬送装置の平面図である。
【図3】同上の正面図である。
【図4】第2の搬送ベルトの断面図である。
【図5】本実施の形態の制御ブロックを示す図である。
【符号の説明】
【0027】
10 ベルト搬送装置
12 プリント基板
13 第1の搬送ベルト
14 第2の搬送ベルト
15 伝達機構
16 駆動プーリ
18 第2の従動プーリ
23 第1の従動プーリ
25 電動モータ
【特許請求の範囲】
【請求項1】
基板を下方から支持する第1の搬送部材と、
前記基板をその搬送方向と略直交する一対の端面に当接支持する第2の搬送部材と、
前記第1の搬送部材と前記第2の搬送部材を、伝動機構を介して略同一の速度で駆動する駆動手段と、を備えている、
ことを特徴とする搬送装置。
【請求項2】
前記伝動機構は、
前記駆動手段の動力を伝達する駆動プーリ、該駆動プーリの動力を伝達する回転伝達体、該回転伝達体の動力を前記第1の搬送部材に伝達する第1の従動プーリと、
前記駆動プーリの動力を前記第2の搬送部材に伝達する第2の従動プーリと、を備えている、
ことを特徴とする請求項1に記載の搬送装置。
【請求項3】
前記第1の従動プーリと前記第2の従動プーリの周速度を略同一とした、
ことを特徴とする請求項2に記載の搬送装置。
【請求項4】
前記第1の搬送部材と前記第2の搬送部材は、搬送ベルトである、
ことを特徴とする請求項1乃至3のいずれかに記載の搬送装置。
【請求項5】
前記駆動手段は電動モータである、
ことを特徴とする請求項1乃至4のいずれかに記載の搬送装置。
【請求項1】
基板を下方から支持する第1の搬送部材と、
前記基板をその搬送方向と略直交する一対の端面に当接支持する第2の搬送部材と、
前記第1の搬送部材と前記第2の搬送部材を、伝動機構を介して略同一の速度で駆動する駆動手段と、を備えている、
ことを特徴とする搬送装置。
【請求項2】
前記伝動機構は、
前記駆動手段の動力を伝達する駆動プーリ、該駆動プーリの動力を伝達する回転伝達体、該回転伝達体の動力を前記第1の搬送部材に伝達する第1の従動プーリと、
前記駆動プーリの動力を前記第2の搬送部材に伝達する第2の従動プーリと、を備えている、
ことを特徴とする請求項1に記載の搬送装置。
【請求項3】
前記第1の従動プーリと前記第2の従動プーリの周速度を略同一とした、
ことを特徴とする請求項2に記載の搬送装置。
【請求項4】
前記第1の搬送部材と前記第2の搬送部材は、搬送ベルトである、
ことを特徴とする請求項1乃至3のいずれかに記載の搬送装置。
【請求項5】
前記駆動手段は電動モータである、
ことを特徴とする請求項1乃至4のいずれかに記載の搬送装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2006−344665(P2006−344665A)
【公開日】平成18年12月21日(2006.12.21)
【国際特許分類】
【出願番号】特願2005−167077(P2005−167077)
【出願日】平成17年6月7日(2005.6.7)
【出願人】(000178022)山形カシオ株式会社 (65)
【Fターム(参考)】
【公開日】平成18年12月21日(2006.12.21)
【国際特許分類】
【出願日】平成17年6月7日(2005.6.7)
【出願人】(000178022)山形カシオ株式会社 (65)
【Fターム(参考)】
[ Back to top ]