
搬送装置
【課題】受入位置で物品を位置決めして受け入れることができ、もって集積姿勢が乱れることのない搬送装置を提供する。
【解決手段】受渡装置12は、受入位置P1において所定の受入姿勢で上流側の搬入コンベア11から1個ずつ物品Xを受け入れて、起立姿勢方向に回動することにより該物品Xを起立させると共に、集積搬送装置13に備えられたバケット44,45に該物品Xを受け渡す受渡台24…24を備える。その場合、受渡台24を、受入姿勢が水平姿勢から反回動方向d′へ角度αだけ傾斜した姿勢となるように構成すると共に、傾斜により低くなる側に、受け入れた物品Xの移動を規制する移動規制壁を設ける。
【解決手段】受渡装置12は、受入位置P1において所定の受入姿勢で上流側の搬入コンベア11から1個ずつ物品Xを受け入れて、起立姿勢方向に回動することにより該物品Xを起立させると共に、集積搬送装置13に備えられたバケット44,45に該物品Xを受け渡す受渡台24…24を備える。その場合、受渡台24を、受入姿勢が水平姿勢から反回動方向d′へ角度αだけ傾斜した姿勢となるように構成すると共に、傾斜により低くなる側に、受け入れた物品Xの移動を規制する移動規制壁を設ける。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、受入位置で受け入れた物品を起立姿勢で所定個数に集積したのち排出位置に搬送する搬送装置に関し、物品搬送の技術分野に属する。
【背景技術】
【0002】
従来、スナック菓子のような袋詰物品は、所定姿勢で所定個数に集積されたのち、段ボール箱や大袋に梱包されて出荷されることがある。そして、近年では、集積工程を自動化して生産性の向上を図ることが要求されている。
【0003】
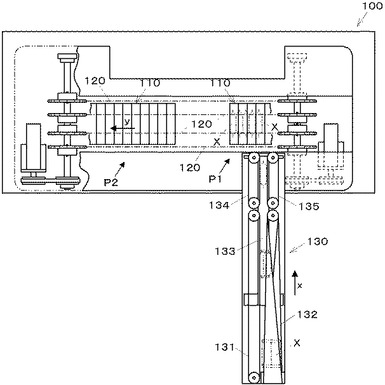
この要求に応えるものとして、例えば特許文献1や特許文献2に開示の搬送装置がある。まず、図16に示すように、特許文献1に開示の搬送装置100は、受入位置P1で受け入れた複数の偏平な物品X…Xを前後に集積した状態に保持する2つのバケット110,110と、該バケット110,110を前記受入位置P1から排出位置P2を経由して循環搬送するための4条のエンドレスチェーン120…120と、外部から供給された物品Xの姿勢を変換した上で前記バケット110,110に受け渡す姿勢変換装置130とを有している。
【0004】
その場合、前記姿勢変換装置130は、走行面が垂直な第1コンベア131と、該第1コンベア131の一側方に設けられて、上流端では走行面が水平であると共に下流端では走行面が垂直となるようにねじられた第2コンベア132と、第1及び第2コンベア131,132の下方に配置されて前記受入位置P1まで延びる走行面が水平な第3コンベア133と、第1及び第2コンベア131,132の下流端に連結されると共に第3コンベア133の上方に配置されて走行面が垂直な一対の第4及び第5コンベア134,135とで構成されている。
【0005】
これにより、外部から供給された物品Xは、姿勢変換装置130により矢印xで示す方向へ搬送中に水平姿勢から起立姿勢とされ、受入位置P1で一方のバケット110に1個ずつ受け渡される。受け渡された物品Xが所定個数に達すると、これら物品X…Xを前後に集積した状態に保持したバケット110は矢印y方向に排出位置P2へ搬送されることになる。また、受入位置P1で一方のバケット110に物品Xが受け入れられ、排出位置P2で他方のバケット110から物品X…Xが排出されるようにすることが可能で、物品Xの効率的な集積及び排出が実現される。
【0006】
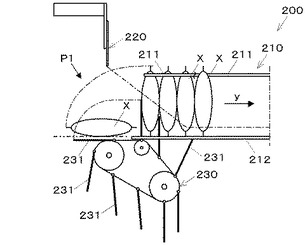
次に、図17に示すように、特許文献2に開示の搬送装置200は、受入位置P1で受け入れた複数の偏平な物品X…Xを前後に集積した状態に保持する保持装置210と、該保持装置210に保持された物品X…Xを図示しない排出位置へ移送するプッシャ220と、外部から供給された物品Xを前記保持装置210に受け渡す受渡装置230とを有している。
【0007】
その場合、前記保持装置210は、起立姿勢の物品Xの上部耳部に係合することにより該物品Xを起立姿勢に保持する搬送方向yの左右に配置された丸棒状のガイドレール211,211と、該物品Xを下方から支持するテーブル212とを有している。また、前記受渡装置230は、走行面上に設けられて、一点鎖線で示す軌道を描いて回動及び水平移動することにより、物品Xを水平姿勢から起立姿勢に変換すると共に該物品Xを矢印y方向に若干移動させるための複数の受渡台231…231を有している。
【0008】
これにより、外部から供給された物品Xは受入位置P1で受渡装置230により水平姿勢から起立姿勢とされ、保持装置210に1個ずつ受け渡される。そして、該物品Xは保持装置210により支持され、所定個数に集積されるとプッシャ220により背後を押されて互いに密着した状態で矢印y方向に排出位置へ搬送されることになる。したがって、この場合にも、物品Xの効率的な集積及び排出が実現される。
【0009】
【特許文献1】特開2003−212338号公報
【特許文献2】特開平9−104526号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
ところで、前記特許文献1に記載の搬送装置100では、物品Xを水平姿勢から起立姿勢に変換する比較的長大な姿勢変換装置130が必要となり、装置全体が大型化して、コストや設置スペースに制約がある場合に問題となる。また、前記姿勢変換装置130の下流側では、物品Xは走行面が垂直とされた一対の第4及び第5コンベア134,135で挟持されて起立姿勢とされるが、例えば同一種類の袋詰物品Xで厚みが変動するとき、あるいは袋詰物品Xの包材が摩擦特性や柔軟性の点で異なるときには、安定して起立姿勢を維持することができないおそれがある。
【0011】
それに対し、前記特許文献2に記載の搬送装置200では、受渡装置230の受渡台231の回動により物品Xを水平姿勢から起立姿勢に変換するので、前記特許文献1に記載の搬送装置100における装置の大型化や姿勢の安定性等の問題はない。
【0012】
しかしながら、供給された物品Xを受渡装置230の受渡台231で受け入れたとき、物品Xの進入方向や重心位置や傾き等の変動に起因して、受渡台230に到来した物品Xの位置ずれが生じることがあり、その場合、適正な位置関係で後段の保持装置210に物品Xを受け渡すことができなくなり、受け渡した物品X…Xの集積姿勢が乱れる結果、排出位置において集積された物品X…Xを円滑に排出することができなくなるという問題がある。
【0013】
そこで、本発明は、受入位置で物品を位置決めして受け入れることができ、もって集積姿勢が乱れることのない搬送装置の提供を課題とする。
【課題を解決するための手段】
【0014】
前記課題を解決するため、本発明は次のように構成したことを特徴とする。
【0015】
まず、請求項1に記載の発明は、所定の受入位置で外部から供給された物品を受け入れて下流側へ受け渡す受渡手段と、該受渡手段から受け渡された複数の物品を前後に集積した状態に保持する保持手段と、該保持手段を排出位置へ移送する搬送手段とを有する搬送装置であって、前記受渡手段は、前記受入位置において所定の受入姿勢で1個ずつ物品を受け入れて起立姿勢方向に回動することにより該物品を起立させると共に、前記保持手段に該物品を受け渡す受渡台を有しており、該受渡台は、前記受入姿勢が水平姿勢から反回動方向へ若干傾斜した姿勢となるように構成されていると共に、傾斜により低くなる側に、受け入れられた物品の移動を規制する移動規制部材が設けられていることを特徴とする。
【0016】
そして、請求項2に記載の発明は、前記請求項1に記載の搬送装置において、前記受入位置へ物品を搬入する搬入手段が備えられており、該搬入手段の搬送面は、前記受渡台の受入姿勢に略一致して傾斜していることを特徴とする。
【発明の効果】
【0017】
まず、請求項1に記載の発明によれば、受渡台は、受入位置で外部から供給された物品を受け入れると起立姿勢方向に回動するので、これに伴って物品は起立姿勢とされる。そして、受渡台は、受け入れた物品を保持手段に受け渡すので、物品は該保持手段により起立姿勢で前後に集積した状態に保持される。したがって、従来のように搬送装置に物品を水平姿勢から起立姿勢とする比較的長大な姿勢変換装置を設ける必要はなく、装置全体が大型化することはない。
【0018】
さらに、従来の姿勢変換装置のように、下流端で走行面が垂直の一対のコンベアで挟持して起立姿勢とするものではないので、例えば同一種類の袋詰物品で厚みが変動するとき、あるいは袋詰物品の包材が摩擦特性や柔軟性の点で異なるときであっても、これらに影響されることなく物品を安定して起立姿勢とすることができる。
【0019】
その上で、受渡台は、物品受入時に、水平姿勢から反回動方向へ若干傾斜した姿勢で物品を受け入れるので、受け入れられた物品は受渡台上で傾斜方向に移動して、移動規制部材によって移動を規制されることになる。したがって、受入位置で物品を位置決めして受け入れることができ、もって集積姿勢が乱れることのない搬送装置が実現される。
【0020】
そして、請求項2に記載の発明によれば、物品供給側の搬入手段の搬送面と物品受入側の受渡台とは略一致して傾斜しているので、搬入手段と受渡台との間の物品授受は円滑になる。しかも、物品は、受渡台に進入する前から姿勢が傾斜しているので、前述した受渡台を傾斜させたことによる効果がさらに助長される。
【発明を実施するための最良の形態】
【0021】
本発明を実施するための最良の形態について説明する。
【0022】
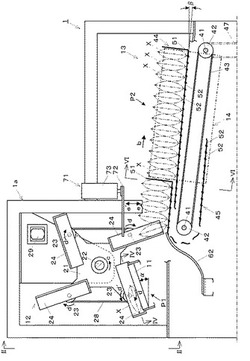
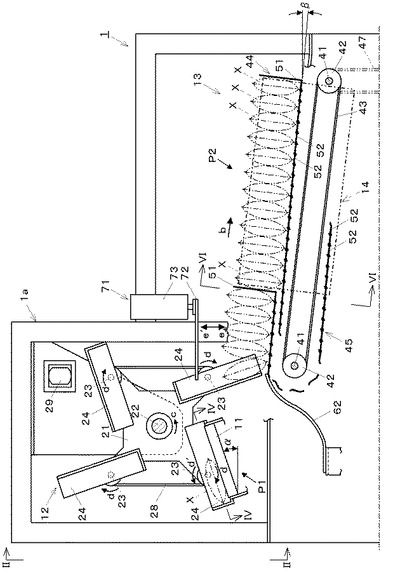
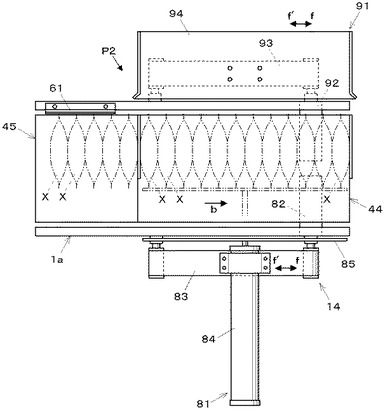
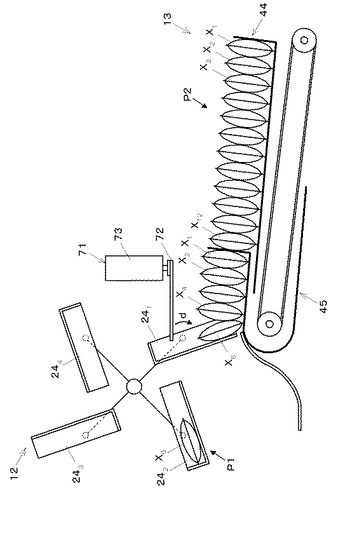
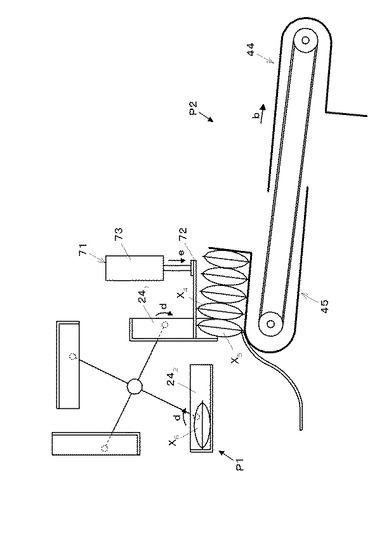
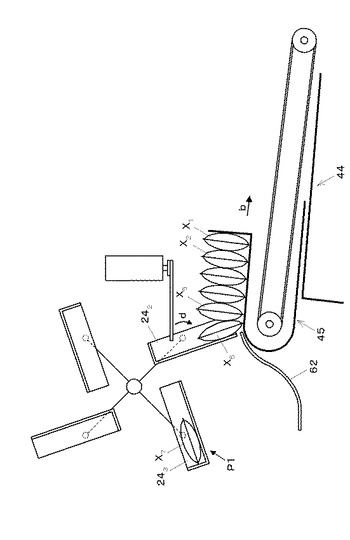
図1及び図2に示す本発明の実施の形態に係る搬送装置1は、スナック菓子等の比較的偏平な袋詰物品Xを搬送するもので、上流側から順に、物品Xを矢印aで示すように受入位置P1へ搬入する搬入コンベア11と、該搬入コンベア11から物品Xを受け入れて下流側へ受け渡す受渡装置12と、該受渡装置12から受け渡された物品X…Xを集積状態で矢印bで示すように排出位置P2へ搬送する集積搬送装置13と、排出位置P2に搬送された一群の物品X…Xを排出する排出装置14とを有している。
【0023】
搬入コンベア11は平ベルト式のもので、該搬入コンベア11の搬送面は、後述する受渡装置12の受渡台の受入姿勢に略一致して傾斜している。すなわち、搬送面は、集積搬送装置13側とは反対側ほど低くなるように角度αだけ傾斜している。
【0024】
受渡装置12は、受入位置P1で搬入コンベア11から物品Xを1個ずつ受け入れて起立姿勢に変換すると共に、下流側の集積搬送装置13に前側から順に詰めつつ該物品Xを受け渡すものである。
【0025】
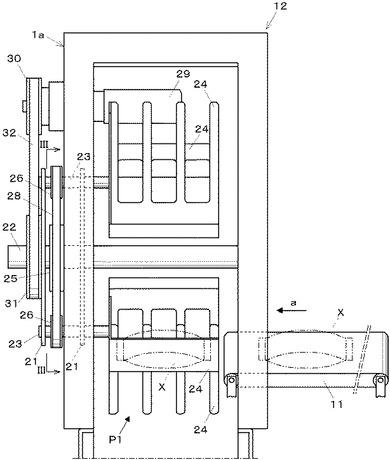
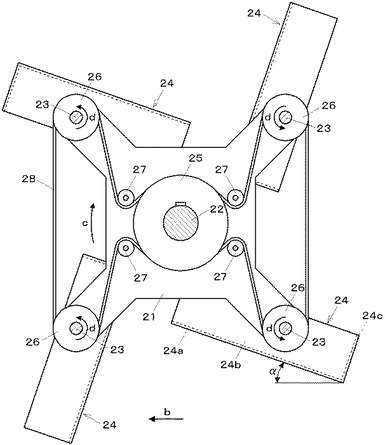
図1〜図3に示すように、受渡装置12には、本体ケース1aの内外に位置して側面視で直交4方向に突出する突出部を有する互いに連結された一対の支持プレート21,21と、該支持プレート21,21の中央部を貫通する固定軸22と、前記各突出部に回転自在に取り付けられた回転軸23…23と、該回転軸23…23にそれぞれ固設された受渡台24…24とが備えられている。前記支持プレート21は、前記固定軸22を中心に矢印c方向に回転する。
【0026】
受渡台24は、起立姿勢方向に矢印dで示すように回動することにより物品Xを起立させると共に、前方へ移動することにより集積搬送装置13に該物品Xを受け渡すものである。その場合、受渡台24は、受入姿勢が水平姿勢から反回動方向d′へ若干傾斜した姿勢となるように構成されており、図例では、前記受渡台24は、水平姿勢から反回動方向d′へ角度αだけ傾斜している。そして、受渡台24の回動支点である回転軸23は、前記受入姿勢における前方側端部より内側に位置する。
【0027】
固定軸22と回転軸23…23とに、それぞれ歯付プーリ25,26…26が固設されている。その場合、前者プーリ25の歯数は後者プーリ26の歯数の2倍である。そして、中央の歯付プーリ25と周囲の4つの歯付プーリ26…26とに、中央の歯付プーリ25近傍に配置されるように外側支持プレート21に立設された4つのガイドプーリ27…27を介して1条の歯付タイミングベルト28が図例のように巻き掛けられている。
【0028】
本体ケース1aの比較的上方にモータ29が設置されており、該モータ29の出力軸に組み付けられたプーリ30と、外側支持プレート21の前記中央の歯付プーリ25とは反対側に固設されたプーリ31とにタイミングベルト32が巻き掛けられている。これにより、モータ29の駆動力が外側支持プレート21に伝達され、前述した歯数の関係で、該支持プレート21が固定軸22つまり中央の歯付プーリ25を中心に矢印c方向に1回転する間に、歯付タイミングベルト28を介して4つの歯付プーリ26…26つまり回転軸23…23がそれぞれ矢印d方向に2回転することになる。
【0029】
すなわち、モータ29が駆動されると、回転軸23…23に固設された受渡台24…24は、矢印d方向に回転して前述した所定の受入姿勢と起立姿勢とを実現すると共に、支持プレート21の矢印c方向の回転を介して前方つまり矢印b方向に移動する。また、支持プレート21が矢印c方向に1回転すると、受渡台24…24は再び元の位置及び姿勢に復帰するようになる。
【0030】
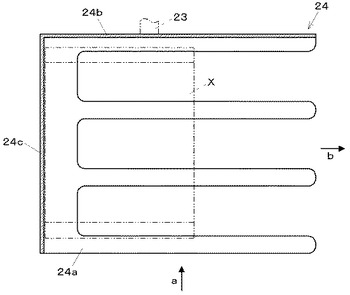
図3及び図4に示すように、矢印a方向から供給される物品Xを受け入れて、前記供給方向aと直交する矢印b方向に受け渡す受渡台24は、載置面24aと、該載置面24aから起立する取付壁24b及び移動規制壁24cとを有している。載置面24aは、供給される物品Xが載置されるフラットな面で、後述する集積搬送装置13と交差可能に櫛歯状とされている。取付壁24bは、前記回転軸23に結合される部分である。移動規制壁24cは、図例のような反回動方向d′に角度αだけ傾斜した受入姿勢において、傾斜により低くなる側に設けられており、受け入れられた物品Xの移動を規制する部分である。
【0031】
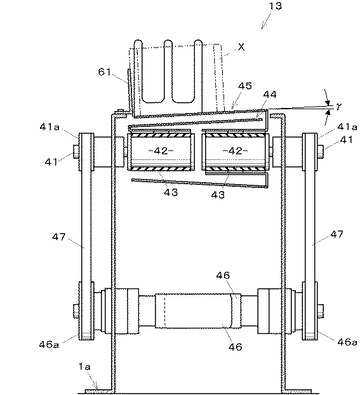
図1及び図5に示すように、集積搬送装置13は、前記受渡装置12から受け渡された起立姿勢の物品Xをその姿勢で所定個数に集積すると共に、該物品X…Xを集積状態で排出位置P2に移送するもので、本体ケース1a内に回転自在に支持された上下流それぞれ一対の支軸41…41を有しており、各支軸41にそれぞれプーリ42が組み付けられている。また、上下流で対応するプーリ42,42間に、それぞれ平ベルト43が巻き掛けられている。
【0032】
そして、各平ベルト43に、起立姿勢の物品X…Xを集積状態で保持して移送するためのバケット44,45がそれぞれ連結されている。その場合、各平ベルト43及び各バケット44,45は、下流側ほど下方へ傾斜しており、特にバケット44,45は、詳しく後述するように、角度βだけ傾斜している。
【0033】
本体ケース1aの下流側下方に、一対のモータ46,46が設置されており、各モータ46の駆動力は、該モータ46の出力軸に組み付けられたプーリ46aと前記支軸41に組み付けられたプーリ41aとに巻き掛けられたタイミングベルト47を介して前記支軸41に伝達されるようになっている。すなわち、各平ベルト43は独立して走行し、もって各バケット44,45は独立して移送されることになる。
【0034】
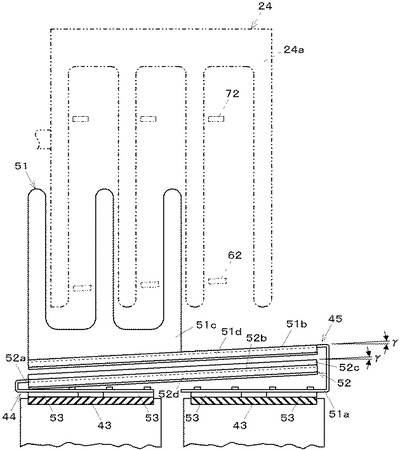
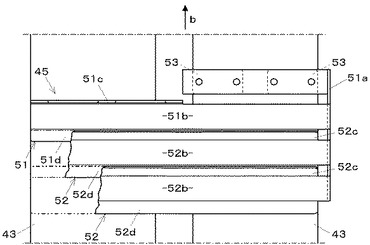
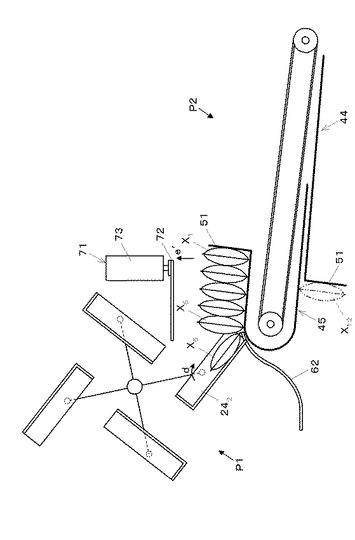
ここで、各バケット44,45の構成について詳しく説明すると、図1及び図6に示すように、各バケット44,45は、搬送方向bに直交して延びる先頭の仕切部材51と該仕切部材51に連設された23個の底面部材52…52とで構成されて、これら部材51,52…52が一体に移動可能とされると共に、各バケット44,45には、図例のように12個の物品X…Xが起立姿勢かつ集積状態で保持される。
【0035】
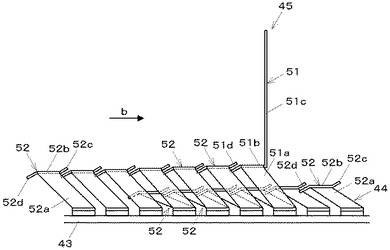
図6〜図8に示すように、仕切部材51の一例としてバケット45に備えられたものは、図例上右側の平ベルト43にスペーサ53,53を介して取り付けられて上方後方へ延びる支持部51aと、該支持部51aから搬送方向bに直交して左側の平ベルト43の上方に延びる平面部51bと、該平面部51bの前端部から上方に起立すると共に正面視で櫛歯状とされた起立部51cと、前記平面部51bの後端部から斜め下方へ延びる後方傾斜面部51dとを有している。
【0036】
一方、バケット45に備えられた底面部材52は、右側の平ベルト43にスペーサ53,53を介して取り付けられて上方後方へ延びる支持部52aと、該支持部52aから搬送方向bに直交して左側の平ベルト43の上方に延びる平面部52bと、該平面部52bの前端部から斜め上方へ延びる前方傾斜面部52cと、前記平面部51bの後端部から斜め下方へ延びる後方傾斜面部52dとを有している。
【0037】
そして、前記平面部51b,52b、前方傾斜面部52c、及び後方傾斜面部51d,52dは、幅方向に左側ほど低くなるように角度γだけ傾斜している。また、平ベルト43に対する底面部材52…52の高さは、上流側ほど低くなっており、仕切部材51と底面部材52、及び底面部材52,52同士は、前方の部材51,52の後方傾斜面部51d,52dと後方の部材52の前方傾斜面部52cとが、前者が下側になってオーバーラップすることにより、下流側ほど下方へ角度βだけ傾斜すると共に、幅方向に左側ほど低くなるように角度γだけ傾斜する搬送面が形成される。
【0038】
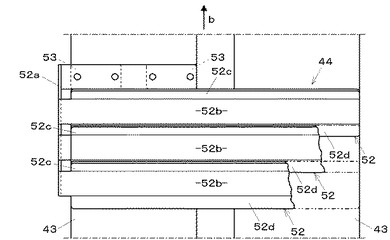
図6、図7、及び図9に示すように、バケット44に備えられた底面部材52は、図例上左側の平ベルト43にスペーサ53,53を介して取り付けられて上方後方へ延びる支持部52aと、該支持部52aから搬送方向bに直交して右側の平ベルト43の上方へ延びる平面部52bと、該平面部52bの前後両端部からそれぞれ斜め上方及び斜め下方へ延びる前方傾斜面部52c及び後方傾斜面部52dとを有している。
【0039】
そして、前述したバケット45と同様にこの場合にも、前記平面部52b、前方傾斜面部52c、及び後方傾斜面部52dは、幅方向に左側ほど低くなるように角度γだけ傾斜している。また、平ベルト43に対する底面部材52…52の高さは、上流側ほど低くなっており、前方の底面部材52の後方傾斜面部52dと後方の底面部材52の前方傾斜面部52cとが、前者が下側になってオーバーラップすることにより、下流側ほど下方へ角度βだけ傾斜すると共に、幅方向に左側ほど低くなるように角度γだけ傾斜する搬送面が形成される。
【0040】
そして、各バケット44,45において、平ベルト43に対する底面部材52…52の高さは、上流側ほど低くなっていることから、左側の平ベルト43に取り付けられて先行するバケット44の上流側と右側の平ベルト43に取り付けられて前記バケット44に後続するバケット45の下流側とがオーバーラップ可能となる。
【0041】
また、各平ベルト43を駆動する各モータ46は、左側の平ベルト43に取り付けられて先行するバケット44の上流側と右側の平ベルト43に取り付けられて前記バケット44に後続するバケット45の下流側とがオーバーラップして、該両バケット44,45に備えられた両仕切部材51,51がそれぞれ前端保持部材及び後端保持部材になることにより起立姿勢で載置される各一群の物品X…Xを保持するための空間を画成すると共に、排出位置P2で該保持空間に保持された一群の物品X…Xが排出されると、前記先行するバケット44の下流側が前記後続するバケット45の上流側にオーバーラップして、該両バケット44,45に備えられた両仕切部材51,51が改めてそれぞれ前端保持部材及び後端保持部材になることにより次の保持空間を画成するように、各平ベルト43を駆動する。
【0042】
ここで、受渡台24とバケット44,45の仕切部材51との交差構造について説明する。図6に示すように、受渡台24の載置面24aと仕切部材51の起立部51cとは、バケット44,45への物品受渡時に、互いに干渉することなく通り抜け可能に図例の櫛歯状に形成されている。
【0043】
図5に示すように、集積搬送装置13において物品Xの搬送面を形成するバケット44,45が角度γだけ傾斜することにより低くなる側つまり図例上左側の側方に、バケット44,45に保持された物品Xの側部に接触して案内する板状のサイドガイド部材61が備えられている。このサイドガイド部材61は、排出位置P2方向に延びている。
【0044】
図1及び図10に示すように、受渡装置12の下方位置から集積搬送装置13の上流端上方に延びる下部ガイド部材62が備えられている。この下部ガイド部材62は、受渡装置12から集積搬送装置13のバケット44,45へ受け渡される物品Xの下端部を支持しつつ案内するもので、本体ケース1aの所定箇所から延びて、集積搬送装置13近傍で前述した傾斜する搬送面に沿う構成とされている。そして、図6及び図10に示すように、下部ガイド部材62は、受渡台24の載置面24a及び仕切部材51の起立面51cと交差可能に櫛歯状とされている。
【0045】
図1及び図10に示すように、集積搬送装置13の上流側上方に、受渡装置12から集積搬送装置13のバケット44,45へ受け渡される起立姿勢の物品Xの上方位置を揃えるための上部ガイド機構71が備えられている。このガイド機構71は、物品Xを上方から押える押え部材72と、該押え部材72を矢印e,e′で示すように上下動させるエアシリンダ73とを有すると共に、該エアシリンダ73は、物品Xの受け渡しに同期して、前記バケット44,45への物品受渡前は前記押え部材72を上動させて物品Xの受け渡しを阻害しない位置に退避させ、物品受渡後は前記押え部材72を下動させて物品Xを上方から押えさせるように駆動する。そして、図6及び図10に示すように、上部ガイド機構71の押え部材72は、受渡台24の載置面24aと交差可能に櫛歯状とされている。
【0046】
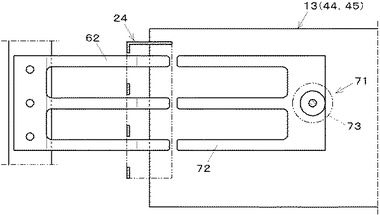
図11に示すように、排出装置14は、集積搬送装置13に備えられたバケット44,45で排出位置P2に搬送された一群の物品X…Xを一斉に系外へ排出するもので、バケット44,45を挟んで搬送面の高い側方に、プッシャ装置81を備えている。このプッシャ装置81は、本体ケース1aに取り付けられたモータ82と、該モータ82の駆動により走行面が矢印f,f′で示すように往復走行する平ベルトコンベア83と、該コンベア83の走行面に取り付けられたエアシリンダ84と、該エアシリンダ84の搬送方向bに直交するように進退するロッドの先端に取り付けられた板状のプッシャ部材85とを有している。その場合、プッシャ装置81は、バケット44,45に同期して移動可能とされており、また、プッシャ部材85は、排出する物品X…Xの厚みや個数に応じた寸法のものに交換可能である。
【0047】
排出装置14は、前記プッシャ装置81に対向する位置関係でバケット44,45を挟んで搬送面の低い側方に、排出ガイド装置91を備えている。この排出ガイド装置91は、本体ケース1aに取り付けられたモータ92と、該モータ92の駆動により走行面が矢印f,f′で示すように往復走行する平ベルトコンベア93と、該コンベア93の走行面に取り付けられた受け台94とを有している。その場合、排出ガイド装置91は、バケット44,45に同期して移動可能とされており、また、受け台94は、排出される物品X…Xの厚みや個数に応じた寸法のものに交換可能である。なお、排出ガイド装置91が備えられた側方上流側に、前述したサイドガイド部材61が設置されている。
【0048】
次に、この搬送装置1の作用について説明する。なお、後述する一連の動作は一例であり、必ずしもこの順序に限定されない。
【0049】
図1及び図2に示したように、搬送面が幅方向に角度αだけ傾斜した上流側の搬入コンベア11から比較的偏平な袋詰物品Xが供給されると、受入位置P1において水平方向から反回動方向d′へ前記角度αだけ傾斜した受渡装置12の受渡台24は、物品Xを1個ずつ受け入れて起立姿勢に変換して下流側の集積搬送装置13のバケット44に受け渡す。
【0050】
以下、図12〜図15に基づいて集積動作を説明するが、図面の複雑化を避けて、受渡装置12及び集積搬送装置13の動作を明確にするため、集積搬送装置13の搬送面の幅方向の傾斜を無視し、バケット44,45の記載を簡略化している。また、受渡台24の動作を明快に示すため、各受渡台24及び各物品Xに適宜固有の符号を付している。
【0051】
まず、図12に示すように、例えば集積搬送装置13において先行するバケット44にすでに所定の12個の物品X1〜X12が起立姿勢で保持されて、該バケット44はほぼ排出位置P2に到達していると共に、後続するバケット45に5個の物品X1〜X5が起立姿勢で保持されている。受渡装置12の先行する受渡台241が、矢印d方向に回動して、最後端の物品X5をさらに起立させようとしている。受入位置P1において、後続する受渡台242に新たな物品X6が供給されている。残る受渡台243,244は図例の位置関係にある。そして、上部ガイド機構71のエアシリンダ73は、押え部材72を上動させて物品Xの受け渡しを阻害しない位置に退避させている。
【0052】
次いで、図13に示すように、バケット44,45に同期して移動する排出装置14のプッシャ装置81の駆動により、バケット44に保持されていた物品X1〜X12は移動中に一斉に排出ガイド装置91に向けて排出され、空になったバケット44は、矢印bで示すように排出位置P2から退去して、後続するバケット45の上流側に取り付くべく移動する。
【0053】
また、先行する受渡台241からバケット45に受け渡された物品X5は、矢印d方向に回動する該受渡台241によりさらに起立姿勢とされる。一方、受入位置P1近傍の後続する受渡台242は、物品X6を保持したまま矢印d方向に回動して、略水平姿勢とされる。
【0054】
その場合、図5及び図6に示したように、バケット45の搬送面は、幅方向に角度γだけ傾斜しているので、バケット45に受け渡された物品X5は傾斜により低くなる側に移動して、当該側方に位置するサイドガイド部材61で移動を規制される。
【0055】
また、図1に示したように、バケット45の搬送面は、下流側ほど下方へ角度βだけ傾斜しているので、バケット45に受け渡された物品X5は、前傾することから傾斜方向に詰めて保持される。
【0056】
また、上部ガイド機構71のエアシリンダ73の作動により押え部材72が矢印eで示すように下動して、前記物品X5ないし近傍の物品X4等の上端部を押える。
【0057】
次いで、図14に示すように、受入位置P1を離れた物品X6を保持した受渡台242が、矢印d方向に回動しながらバケット45に接近しており、物品X6は、傾斜する受渡台242を滑り落ちて、下部ガイド部材62に着地する。このとき、前述したように互いに干渉しない形状とされている受渡台242と下部ガイド部材62とが交差する。
【0058】
また、排出位置P2を退去した空になっているバケット44は、物品受取中のバケット45の上流側に所定の範囲でオーバーラップして、両バケット44,45の仕切部材51,51により、所定の12個の物品X1〜X12を保持するための空間が画成されている。なお、オーバーラップ後、両バケット44,45は同期して移動する。そして、上部ガイド機構71のエアシリンダ73の作動により、物品X5等の上端部を押えていた押え部材72は矢印e′で示すように上動する。
【0059】
次いで、図15に示すように、両バケット44,45は、同期しつつ物品1個分だけ矢印b方向に移動する。受渡台242は、さらに矢印d方向に回動して、物品X6を下部ガイド部材62からバケット45に受け渡すと共に、バケット45上の物品X1〜X5の背後に起立姿勢で寄せる。一方、後続する受渡台243は、受入位置P1に到達すると共に、所定の受入姿勢とされており、該受渡台243に、新たな物品X7が供給されている。
【0060】
このように、受渡装置12には4つの受渡台241〜244が備えられ、これらが入れ替わり立ち代り上流側から物品Xを受け入れることができるので、受入位置P1における集積工程の高速化が図られる。
【0061】
以上のように構成したことにより、受渡台24は、受入位置P1で外部から供給された偏平な物品Xを受け入れると起立姿勢方向に回動するので、これに伴って物品Xは起立姿勢とされる。そして、受渡台24は、受け入れた物品Xをバケット44,45に前側から順に詰めつつ受け渡すので、物品X…Xは該バケット44,45により起立姿勢で前後に集積した状態に保持される。したがって、従来のように搬送装置に物品Xを水平姿勢から起立姿勢とする比較的長大な姿勢変換装置を設ける必要はなく、装置全体が大型化することはない。
【0062】
さらに、従来の姿勢変換装置のように、下流端で走行面が垂直の一対のコンベアで挟持して起立姿勢とするものではないので、例えば同一種類の袋詰物品で厚みが変動するとき、あるいは袋詰物品の包材が摩擦特性や柔軟性の点で異なるときであっても、これらに影響されることなく物品を安定して起立姿勢とすることができる。
【0063】
その上で、受渡台24は、物品受入時に、水平姿勢から反回動方向d′へ若干傾斜した姿勢で物品Xを受け入れるので、受け入れられた物品Xは受渡台24上で傾斜方向に移動して、移動規制壁24cによって移動を規制されることになる。したがって、受入位置P1で物品Xを位置決めして受け入れることができ、もって集積姿勢が乱れることのない搬送装置1が実現される。
【0064】
そして、物品供給側の搬入コンベア11の搬送面と物品受入側の受渡台24とは略一致して傾斜しているので、搬入コンベア11と受渡台24との間の物品授受は円滑になる。しかも、物品Xは、受渡台24に進入する前から姿勢が傾斜しているので、前述した受渡台24を傾斜させたことによる効果がさらに助長される。
【0065】
なお、本発明は、具体的に詳述した前記実施の形態に限定されることはなく、本発明の趣旨に沿うものであればよい。例えば、傾斜角度α,β,γは具体的数字を用いて示さなかったが、物品Xの搬送や受け渡しが安定して行なわれる範囲で設定される。特に、前記角度β,γはゼロでもよい。
【0066】
そして、集積搬送装置13には一対の平ベルト43,43及びバケット44,45が備えられていたが、それぞれ増設可能である。
【産業上の利用可能性】
【0067】
以上説明したように、本発明によれば、受入位置で物品を位置決めして受け入れることができ、もって集積姿勢が乱れることのない搬送装置が提供される。すなわち、本発明は、物品搬送の技術分野に広く好適である。
【図面の簡単な説明】
【0068】
【図1】本発明の実施の形態に係る搬送装置の側面図である。
【図2】図1のII−II線による矢視図で、搬入コンベアと受渡装置とを示す。
【図3】図2のIII−III線による拡大矢視図で、受渡台の回転構造を示す。
【図4】図1のIV−IV線による拡大断面図で、受渡台の構造を示す。
【図5】図1のVI−VI線による拡大断面図で、集積搬送装置の駆動構造を示す。
【図6】一対のバケット間のオーバーラップ構造を説明するための正面図である。
【図7】同じく側面図である。
【図8】一方のバケットに備えられた仕切部材と底面部材との平面図である。
【図9】他方のバケットに備えられた底面部材の平面図である。
【図10】下部ガイド部材及び上部ガイド機構の平面図である。
【図11】排出装置の平面図である。
【図12】集積動作を説明するための模式的な側面図で、受渡台が新たな物品を受け入れた状態を示す。
【図13】同じく前記受渡台が略水平姿勢とされた状態を示す。
【図14】同じく前記受渡台が物品を下部ガイド部材を介してバケットへ受け渡そうとしている状態を示す。
【図15】同じく前記受渡台が物品をバケットへ受け渡すと共に、後続する受渡台が新たな物品を受け入れた状態を示す。
【図16】従来の搬送装置の平面図である。
【図17】従来の別なる搬送装置の側面図である。
【符号の説明】
【0069】
1 搬送装置
11 搬入コンベア(搬入手段)
12 受渡装置(受渡手段)
24 受渡台
24c 移動規制壁(移動規制部材)
43 平ベルト(搬送手段)
44,45 バケット(保持手段)
P1 受入位置
P2 排出位置
X 物品
d′ 反回動方向
α 傾斜角度
【技術分野】
【0001】
本発明は、受入位置で受け入れた物品を起立姿勢で所定個数に集積したのち排出位置に搬送する搬送装置に関し、物品搬送の技術分野に属する。
【背景技術】
【0002】
従来、スナック菓子のような袋詰物品は、所定姿勢で所定個数に集積されたのち、段ボール箱や大袋に梱包されて出荷されることがある。そして、近年では、集積工程を自動化して生産性の向上を図ることが要求されている。
【0003】
この要求に応えるものとして、例えば特許文献1や特許文献2に開示の搬送装置がある。まず、図16に示すように、特許文献1に開示の搬送装置100は、受入位置P1で受け入れた複数の偏平な物品X…Xを前後に集積した状態に保持する2つのバケット110,110と、該バケット110,110を前記受入位置P1から排出位置P2を経由して循環搬送するための4条のエンドレスチェーン120…120と、外部から供給された物品Xの姿勢を変換した上で前記バケット110,110に受け渡す姿勢変換装置130とを有している。
【0004】
その場合、前記姿勢変換装置130は、走行面が垂直な第1コンベア131と、該第1コンベア131の一側方に設けられて、上流端では走行面が水平であると共に下流端では走行面が垂直となるようにねじられた第2コンベア132と、第1及び第2コンベア131,132の下方に配置されて前記受入位置P1まで延びる走行面が水平な第3コンベア133と、第1及び第2コンベア131,132の下流端に連結されると共に第3コンベア133の上方に配置されて走行面が垂直な一対の第4及び第5コンベア134,135とで構成されている。
【0005】
これにより、外部から供給された物品Xは、姿勢変換装置130により矢印xで示す方向へ搬送中に水平姿勢から起立姿勢とされ、受入位置P1で一方のバケット110に1個ずつ受け渡される。受け渡された物品Xが所定個数に達すると、これら物品X…Xを前後に集積した状態に保持したバケット110は矢印y方向に排出位置P2へ搬送されることになる。また、受入位置P1で一方のバケット110に物品Xが受け入れられ、排出位置P2で他方のバケット110から物品X…Xが排出されるようにすることが可能で、物品Xの効率的な集積及び排出が実現される。
【0006】
次に、図17に示すように、特許文献2に開示の搬送装置200は、受入位置P1で受け入れた複数の偏平な物品X…Xを前後に集積した状態に保持する保持装置210と、該保持装置210に保持された物品X…Xを図示しない排出位置へ移送するプッシャ220と、外部から供給された物品Xを前記保持装置210に受け渡す受渡装置230とを有している。
【0007】
その場合、前記保持装置210は、起立姿勢の物品Xの上部耳部に係合することにより該物品Xを起立姿勢に保持する搬送方向yの左右に配置された丸棒状のガイドレール211,211と、該物品Xを下方から支持するテーブル212とを有している。また、前記受渡装置230は、走行面上に設けられて、一点鎖線で示す軌道を描いて回動及び水平移動することにより、物品Xを水平姿勢から起立姿勢に変換すると共に該物品Xを矢印y方向に若干移動させるための複数の受渡台231…231を有している。
【0008】
これにより、外部から供給された物品Xは受入位置P1で受渡装置230により水平姿勢から起立姿勢とされ、保持装置210に1個ずつ受け渡される。そして、該物品Xは保持装置210により支持され、所定個数に集積されるとプッシャ220により背後を押されて互いに密着した状態で矢印y方向に排出位置へ搬送されることになる。したがって、この場合にも、物品Xの効率的な集積及び排出が実現される。
【0009】
【特許文献1】特開2003−212338号公報
【特許文献2】特開平9−104526号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
ところで、前記特許文献1に記載の搬送装置100では、物品Xを水平姿勢から起立姿勢に変換する比較的長大な姿勢変換装置130が必要となり、装置全体が大型化して、コストや設置スペースに制約がある場合に問題となる。また、前記姿勢変換装置130の下流側では、物品Xは走行面が垂直とされた一対の第4及び第5コンベア134,135で挟持されて起立姿勢とされるが、例えば同一種類の袋詰物品Xで厚みが変動するとき、あるいは袋詰物品Xの包材が摩擦特性や柔軟性の点で異なるときには、安定して起立姿勢を維持することができないおそれがある。
【0011】
それに対し、前記特許文献2に記載の搬送装置200では、受渡装置230の受渡台231の回動により物品Xを水平姿勢から起立姿勢に変換するので、前記特許文献1に記載の搬送装置100における装置の大型化や姿勢の安定性等の問題はない。
【0012】
しかしながら、供給された物品Xを受渡装置230の受渡台231で受け入れたとき、物品Xの進入方向や重心位置や傾き等の変動に起因して、受渡台230に到来した物品Xの位置ずれが生じることがあり、その場合、適正な位置関係で後段の保持装置210に物品Xを受け渡すことができなくなり、受け渡した物品X…Xの集積姿勢が乱れる結果、排出位置において集積された物品X…Xを円滑に排出することができなくなるという問題がある。
【0013】
そこで、本発明は、受入位置で物品を位置決めして受け入れることができ、もって集積姿勢が乱れることのない搬送装置の提供を課題とする。
【課題を解決するための手段】
【0014】
前記課題を解決するため、本発明は次のように構成したことを特徴とする。
【0015】
まず、請求項1に記載の発明は、所定の受入位置で外部から供給された物品を受け入れて下流側へ受け渡す受渡手段と、該受渡手段から受け渡された複数の物品を前後に集積した状態に保持する保持手段と、該保持手段を排出位置へ移送する搬送手段とを有する搬送装置であって、前記受渡手段は、前記受入位置において所定の受入姿勢で1個ずつ物品を受け入れて起立姿勢方向に回動することにより該物品を起立させると共に、前記保持手段に該物品を受け渡す受渡台を有しており、該受渡台は、前記受入姿勢が水平姿勢から反回動方向へ若干傾斜した姿勢となるように構成されていると共に、傾斜により低くなる側に、受け入れられた物品の移動を規制する移動規制部材が設けられていることを特徴とする。
【0016】
そして、請求項2に記載の発明は、前記請求項1に記載の搬送装置において、前記受入位置へ物品を搬入する搬入手段が備えられており、該搬入手段の搬送面は、前記受渡台の受入姿勢に略一致して傾斜していることを特徴とする。
【発明の効果】
【0017】
まず、請求項1に記載の発明によれば、受渡台は、受入位置で外部から供給された物品を受け入れると起立姿勢方向に回動するので、これに伴って物品は起立姿勢とされる。そして、受渡台は、受け入れた物品を保持手段に受け渡すので、物品は該保持手段により起立姿勢で前後に集積した状態に保持される。したがって、従来のように搬送装置に物品を水平姿勢から起立姿勢とする比較的長大な姿勢変換装置を設ける必要はなく、装置全体が大型化することはない。
【0018】
さらに、従来の姿勢変換装置のように、下流端で走行面が垂直の一対のコンベアで挟持して起立姿勢とするものではないので、例えば同一種類の袋詰物品で厚みが変動するとき、あるいは袋詰物品の包材が摩擦特性や柔軟性の点で異なるときであっても、これらに影響されることなく物品を安定して起立姿勢とすることができる。
【0019】
その上で、受渡台は、物品受入時に、水平姿勢から反回動方向へ若干傾斜した姿勢で物品を受け入れるので、受け入れられた物品は受渡台上で傾斜方向に移動して、移動規制部材によって移動を規制されることになる。したがって、受入位置で物品を位置決めして受け入れることができ、もって集積姿勢が乱れることのない搬送装置が実現される。
【0020】
そして、請求項2に記載の発明によれば、物品供給側の搬入手段の搬送面と物品受入側の受渡台とは略一致して傾斜しているので、搬入手段と受渡台との間の物品授受は円滑になる。しかも、物品は、受渡台に進入する前から姿勢が傾斜しているので、前述した受渡台を傾斜させたことによる効果がさらに助長される。
【発明を実施するための最良の形態】
【0021】
本発明を実施するための最良の形態について説明する。
【0022】
図1及び図2に示す本発明の実施の形態に係る搬送装置1は、スナック菓子等の比較的偏平な袋詰物品Xを搬送するもので、上流側から順に、物品Xを矢印aで示すように受入位置P1へ搬入する搬入コンベア11と、該搬入コンベア11から物品Xを受け入れて下流側へ受け渡す受渡装置12と、該受渡装置12から受け渡された物品X…Xを集積状態で矢印bで示すように排出位置P2へ搬送する集積搬送装置13と、排出位置P2に搬送された一群の物品X…Xを排出する排出装置14とを有している。
【0023】
搬入コンベア11は平ベルト式のもので、該搬入コンベア11の搬送面は、後述する受渡装置12の受渡台の受入姿勢に略一致して傾斜している。すなわち、搬送面は、集積搬送装置13側とは反対側ほど低くなるように角度αだけ傾斜している。
【0024】
受渡装置12は、受入位置P1で搬入コンベア11から物品Xを1個ずつ受け入れて起立姿勢に変換すると共に、下流側の集積搬送装置13に前側から順に詰めつつ該物品Xを受け渡すものである。
【0025】
図1〜図3に示すように、受渡装置12には、本体ケース1aの内外に位置して側面視で直交4方向に突出する突出部を有する互いに連結された一対の支持プレート21,21と、該支持プレート21,21の中央部を貫通する固定軸22と、前記各突出部に回転自在に取り付けられた回転軸23…23と、該回転軸23…23にそれぞれ固設された受渡台24…24とが備えられている。前記支持プレート21は、前記固定軸22を中心に矢印c方向に回転する。
【0026】
受渡台24は、起立姿勢方向に矢印dで示すように回動することにより物品Xを起立させると共に、前方へ移動することにより集積搬送装置13に該物品Xを受け渡すものである。その場合、受渡台24は、受入姿勢が水平姿勢から反回動方向d′へ若干傾斜した姿勢となるように構成されており、図例では、前記受渡台24は、水平姿勢から反回動方向d′へ角度αだけ傾斜している。そして、受渡台24の回動支点である回転軸23は、前記受入姿勢における前方側端部より内側に位置する。
【0027】
固定軸22と回転軸23…23とに、それぞれ歯付プーリ25,26…26が固設されている。その場合、前者プーリ25の歯数は後者プーリ26の歯数の2倍である。そして、中央の歯付プーリ25と周囲の4つの歯付プーリ26…26とに、中央の歯付プーリ25近傍に配置されるように外側支持プレート21に立設された4つのガイドプーリ27…27を介して1条の歯付タイミングベルト28が図例のように巻き掛けられている。
【0028】
本体ケース1aの比較的上方にモータ29が設置されており、該モータ29の出力軸に組み付けられたプーリ30と、外側支持プレート21の前記中央の歯付プーリ25とは反対側に固設されたプーリ31とにタイミングベルト32が巻き掛けられている。これにより、モータ29の駆動力が外側支持プレート21に伝達され、前述した歯数の関係で、該支持プレート21が固定軸22つまり中央の歯付プーリ25を中心に矢印c方向に1回転する間に、歯付タイミングベルト28を介して4つの歯付プーリ26…26つまり回転軸23…23がそれぞれ矢印d方向に2回転することになる。
【0029】
すなわち、モータ29が駆動されると、回転軸23…23に固設された受渡台24…24は、矢印d方向に回転して前述した所定の受入姿勢と起立姿勢とを実現すると共に、支持プレート21の矢印c方向の回転を介して前方つまり矢印b方向に移動する。また、支持プレート21が矢印c方向に1回転すると、受渡台24…24は再び元の位置及び姿勢に復帰するようになる。
【0030】
図3及び図4に示すように、矢印a方向から供給される物品Xを受け入れて、前記供給方向aと直交する矢印b方向に受け渡す受渡台24は、載置面24aと、該載置面24aから起立する取付壁24b及び移動規制壁24cとを有している。載置面24aは、供給される物品Xが載置されるフラットな面で、後述する集積搬送装置13と交差可能に櫛歯状とされている。取付壁24bは、前記回転軸23に結合される部分である。移動規制壁24cは、図例のような反回動方向d′に角度αだけ傾斜した受入姿勢において、傾斜により低くなる側に設けられており、受け入れられた物品Xの移動を規制する部分である。
【0031】
図1及び図5に示すように、集積搬送装置13は、前記受渡装置12から受け渡された起立姿勢の物品Xをその姿勢で所定個数に集積すると共に、該物品X…Xを集積状態で排出位置P2に移送するもので、本体ケース1a内に回転自在に支持された上下流それぞれ一対の支軸41…41を有しており、各支軸41にそれぞれプーリ42が組み付けられている。また、上下流で対応するプーリ42,42間に、それぞれ平ベルト43が巻き掛けられている。
【0032】
そして、各平ベルト43に、起立姿勢の物品X…Xを集積状態で保持して移送するためのバケット44,45がそれぞれ連結されている。その場合、各平ベルト43及び各バケット44,45は、下流側ほど下方へ傾斜しており、特にバケット44,45は、詳しく後述するように、角度βだけ傾斜している。
【0033】
本体ケース1aの下流側下方に、一対のモータ46,46が設置されており、各モータ46の駆動力は、該モータ46の出力軸に組み付けられたプーリ46aと前記支軸41に組み付けられたプーリ41aとに巻き掛けられたタイミングベルト47を介して前記支軸41に伝達されるようになっている。すなわち、各平ベルト43は独立して走行し、もって各バケット44,45は独立して移送されることになる。
【0034】
ここで、各バケット44,45の構成について詳しく説明すると、図1及び図6に示すように、各バケット44,45は、搬送方向bに直交して延びる先頭の仕切部材51と該仕切部材51に連設された23個の底面部材52…52とで構成されて、これら部材51,52…52が一体に移動可能とされると共に、各バケット44,45には、図例のように12個の物品X…Xが起立姿勢かつ集積状態で保持される。
【0035】
図6〜図8に示すように、仕切部材51の一例としてバケット45に備えられたものは、図例上右側の平ベルト43にスペーサ53,53を介して取り付けられて上方後方へ延びる支持部51aと、該支持部51aから搬送方向bに直交して左側の平ベルト43の上方に延びる平面部51bと、該平面部51bの前端部から上方に起立すると共に正面視で櫛歯状とされた起立部51cと、前記平面部51bの後端部から斜め下方へ延びる後方傾斜面部51dとを有している。
【0036】
一方、バケット45に備えられた底面部材52は、右側の平ベルト43にスペーサ53,53を介して取り付けられて上方後方へ延びる支持部52aと、該支持部52aから搬送方向bに直交して左側の平ベルト43の上方に延びる平面部52bと、該平面部52bの前端部から斜め上方へ延びる前方傾斜面部52cと、前記平面部51bの後端部から斜め下方へ延びる後方傾斜面部52dとを有している。
【0037】
そして、前記平面部51b,52b、前方傾斜面部52c、及び後方傾斜面部51d,52dは、幅方向に左側ほど低くなるように角度γだけ傾斜している。また、平ベルト43に対する底面部材52…52の高さは、上流側ほど低くなっており、仕切部材51と底面部材52、及び底面部材52,52同士は、前方の部材51,52の後方傾斜面部51d,52dと後方の部材52の前方傾斜面部52cとが、前者が下側になってオーバーラップすることにより、下流側ほど下方へ角度βだけ傾斜すると共に、幅方向に左側ほど低くなるように角度γだけ傾斜する搬送面が形成される。
【0038】
図6、図7、及び図9に示すように、バケット44に備えられた底面部材52は、図例上左側の平ベルト43にスペーサ53,53を介して取り付けられて上方後方へ延びる支持部52aと、該支持部52aから搬送方向bに直交して右側の平ベルト43の上方へ延びる平面部52bと、該平面部52bの前後両端部からそれぞれ斜め上方及び斜め下方へ延びる前方傾斜面部52c及び後方傾斜面部52dとを有している。
【0039】
そして、前述したバケット45と同様にこの場合にも、前記平面部52b、前方傾斜面部52c、及び後方傾斜面部52dは、幅方向に左側ほど低くなるように角度γだけ傾斜している。また、平ベルト43に対する底面部材52…52の高さは、上流側ほど低くなっており、前方の底面部材52の後方傾斜面部52dと後方の底面部材52の前方傾斜面部52cとが、前者が下側になってオーバーラップすることにより、下流側ほど下方へ角度βだけ傾斜すると共に、幅方向に左側ほど低くなるように角度γだけ傾斜する搬送面が形成される。
【0040】
そして、各バケット44,45において、平ベルト43に対する底面部材52…52の高さは、上流側ほど低くなっていることから、左側の平ベルト43に取り付けられて先行するバケット44の上流側と右側の平ベルト43に取り付けられて前記バケット44に後続するバケット45の下流側とがオーバーラップ可能となる。
【0041】
また、各平ベルト43を駆動する各モータ46は、左側の平ベルト43に取り付けられて先行するバケット44の上流側と右側の平ベルト43に取り付けられて前記バケット44に後続するバケット45の下流側とがオーバーラップして、該両バケット44,45に備えられた両仕切部材51,51がそれぞれ前端保持部材及び後端保持部材になることにより起立姿勢で載置される各一群の物品X…Xを保持するための空間を画成すると共に、排出位置P2で該保持空間に保持された一群の物品X…Xが排出されると、前記先行するバケット44の下流側が前記後続するバケット45の上流側にオーバーラップして、該両バケット44,45に備えられた両仕切部材51,51が改めてそれぞれ前端保持部材及び後端保持部材になることにより次の保持空間を画成するように、各平ベルト43を駆動する。
【0042】
ここで、受渡台24とバケット44,45の仕切部材51との交差構造について説明する。図6に示すように、受渡台24の載置面24aと仕切部材51の起立部51cとは、バケット44,45への物品受渡時に、互いに干渉することなく通り抜け可能に図例の櫛歯状に形成されている。
【0043】
図5に示すように、集積搬送装置13において物品Xの搬送面を形成するバケット44,45が角度γだけ傾斜することにより低くなる側つまり図例上左側の側方に、バケット44,45に保持された物品Xの側部に接触して案内する板状のサイドガイド部材61が備えられている。このサイドガイド部材61は、排出位置P2方向に延びている。
【0044】
図1及び図10に示すように、受渡装置12の下方位置から集積搬送装置13の上流端上方に延びる下部ガイド部材62が備えられている。この下部ガイド部材62は、受渡装置12から集積搬送装置13のバケット44,45へ受け渡される物品Xの下端部を支持しつつ案内するもので、本体ケース1aの所定箇所から延びて、集積搬送装置13近傍で前述した傾斜する搬送面に沿う構成とされている。そして、図6及び図10に示すように、下部ガイド部材62は、受渡台24の載置面24a及び仕切部材51の起立面51cと交差可能に櫛歯状とされている。
【0045】
図1及び図10に示すように、集積搬送装置13の上流側上方に、受渡装置12から集積搬送装置13のバケット44,45へ受け渡される起立姿勢の物品Xの上方位置を揃えるための上部ガイド機構71が備えられている。このガイド機構71は、物品Xを上方から押える押え部材72と、該押え部材72を矢印e,e′で示すように上下動させるエアシリンダ73とを有すると共に、該エアシリンダ73は、物品Xの受け渡しに同期して、前記バケット44,45への物品受渡前は前記押え部材72を上動させて物品Xの受け渡しを阻害しない位置に退避させ、物品受渡後は前記押え部材72を下動させて物品Xを上方から押えさせるように駆動する。そして、図6及び図10に示すように、上部ガイド機構71の押え部材72は、受渡台24の載置面24aと交差可能に櫛歯状とされている。
【0046】
図11に示すように、排出装置14は、集積搬送装置13に備えられたバケット44,45で排出位置P2に搬送された一群の物品X…Xを一斉に系外へ排出するもので、バケット44,45を挟んで搬送面の高い側方に、プッシャ装置81を備えている。このプッシャ装置81は、本体ケース1aに取り付けられたモータ82と、該モータ82の駆動により走行面が矢印f,f′で示すように往復走行する平ベルトコンベア83と、該コンベア83の走行面に取り付けられたエアシリンダ84と、該エアシリンダ84の搬送方向bに直交するように進退するロッドの先端に取り付けられた板状のプッシャ部材85とを有している。その場合、プッシャ装置81は、バケット44,45に同期して移動可能とされており、また、プッシャ部材85は、排出する物品X…Xの厚みや個数に応じた寸法のものに交換可能である。
【0047】
排出装置14は、前記プッシャ装置81に対向する位置関係でバケット44,45を挟んで搬送面の低い側方に、排出ガイド装置91を備えている。この排出ガイド装置91は、本体ケース1aに取り付けられたモータ92と、該モータ92の駆動により走行面が矢印f,f′で示すように往復走行する平ベルトコンベア93と、該コンベア93の走行面に取り付けられた受け台94とを有している。その場合、排出ガイド装置91は、バケット44,45に同期して移動可能とされており、また、受け台94は、排出される物品X…Xの厚みや個数に応じた寸法のものに交換可能である。なお、排出ガイド装置91が備えられた側方上流側に、前述したサイドガイド部材61が設置されている。
【0048】
次に、この搬送装置1の作用について説明する。なお、後述する一連の動作は一例であり、必ずしもこの順序に限定されない。
【0049】
図1及び図2に示したように、搬送面が幅方向に角度αだけ傾斜した上流側の搬入コンベア11から比較的偏平な袋詰物品Xが供給されると、受入位置P1において水平方向から反回動方向d′へ前記角度αだけ傾斜した受渡装置12の受渡台24は、物品Xを1個ずつ受け入れて起立姿勢に変換して下流側の集積搬送装置13のバケット44に受け渡す。
【0050】
以下、図12〜図15に基づいて集積動作を説明するが、図面の複雑化を避けて、受渡装置12及び集積搬送装置13の動作を明確にするため、集積搬送装置13の搬送面の幅方向の傾斜を無視し、バケット44,45の記載を簡略化している。また、受渡台24の動作を明快に示すため、各受渡台24及び各物品Xに適宜固有の符号を付している。
【0051】
まず、図12に示すように、例えば集積搬送装置13において先行するバケット44にすでに所定の12個の物品X1〜X12が起立姿勢で保持されて、該バケット44はほぼ排出位置P2に到達していると共に、後続するバケット45に5個の物品X1〜X5が起立姿勢で保持されている。受渡装置12の先行する受渡台241が、矢印d方向に回動して、最後端の物品X5をさらに起立させようとしている。受入位置P1において、後続する受渡台242に新たな物品X6が供給されている。残る受渡台243,244は図例の位置関係にある。そして、上部ガイド機構71のエアシリンダ73は、押え部材72を上動させて物品Xの受け渡しを阻害しない位置に退避させている。
【0052】
次いで、図13に示すように、バケット44,45に同期して移動する排出装置14のプッシャ装置81の駆動により、バケット44に保持されていた物品X1〜X12は移動中に一斉に排出ガイド装置91に向けて排出され、空になったバケット44は、矢印bで示すように排出位置P2から退去して、後続するバケット45の上流側に取り付くべく移動する。
【0053】
また、先行する受渡台241からバケット45に受け渡された物品X5は、矢印d方向に回動する該受渡台241によりさらに起立姿勢とされる。一方、受入位置P1近傍の後続する受渡台242は、物品X6を保持したまま矢印d方向に回動して、略水平姿勢とされる。
【0054】
その場合、図5及び図6に示したように、バケット45の搬送面は、幅方向に角度γだけ傾斜しているので、バケット45に受け渡された物品X5は傾斜により低くなる側に移動して、当該側方に位置するサイドガイド部材61で移動を規制される。
【0055】
また、図1に示したように、バケット45の搬送面は、下流側ほど下方へ角度βだけ傾斜しているので、バケット45に受け渡された物品X5は、前傾することから傾斜方向に詰めて保持される。
【0056】
また、上部ガイド機構71のエアシリンダ73の作動により押え部材72が矢印eで示すように下動して、前記物品X5ないし近傍の物品X4等の上端部を押える。
【0057】
次いで、図14に示すように、受入位置P1を離れた物品X6を保持した受渡台242が、矢印d方向に回動しながらバケット45に接近しており、物品X6は、傾斜する受渡台242を滑り落ちて、下部ガイド部材62に着地する。このとき、前述したように互いに干渉しない形状とされている受渡台242と下部ガイド部材62とが交差する。
【0058】
また、排出位置P2を退去した空になっているバケット44は、物品受取中のバケット45の上流側に所定の範囲でオーバーラップして、両バケット44,45の仕切部材51,51により、所定の12個の物品X1〜X12を保持するための空間が画成されている。なお、オーバーラップ後、両バケット44,45は同期して移動する。そして、上部ガイド機構71のエアシリンダ73の作動により、物品X5等の上端部を押えていた押え部材72は矢印e′で示すように上動する。
【0059】
次いで、図15に示すように、両バケット44,45は、同期しつつ物品1個分だけ矢印b方向に移動する。受渡台242は、さらに矢印d方向に回動して、物品X6を下部ガイド部材62からバケット45に受け渡すと共に、バケット45上の物品X1〜X5の背後に起立姿勢で寄せる。一方、後続する受渡台243は、受入位置P1に到達すると共に、所定の受入姿勢とされており、該受渡台243に、新たな物品X7が供給されている。
【0060】
このように、受渡装置12には4つの受渡台241〜244が備えられ、これらが入れ替わり立ち代り上流側から物品Xを受け入れることができるので、受入位置P1における集積工程の高速化が図られる。
【0061】
以上のように構成したことにより、受渡台24は、受入位置P1で外部から供給された偏平な物品Xを受け入れると起立姿勢方向に回動するので、これに伴って物品Xは起立姿勢とされる。そして、受渡台24は、受け入れた物品Xをバケット44,45に前側から順に詰めつつ受け渡すので、物品X…Xは該バケット44,45により起立姿勢で前後に集積した状態に保持される。したがって、従来のように搬送装置に物品Xを水平姿勢から起立姿勢とする比較的長大な姿勢変換装置を設ける必要はなく、装置全体が大型化することはない。
【0062】
さらに、従来の姿勢変換装置のように、下流端で走行面が垂直の一対のコンベアで挟持して起立姿勢とするものではないので、例えば同一種類の袋詰物品で厚みが変動するとき、あるいは袋詰物品の包材が摩擦特性や柔軟性の点で異なるときであっても、これらに影響されることなく物品を安定して起立姿勢とすることができる。
【0063】
その上で、受渡台24は、物品受入時に、水平姿勢から反回動方向d′へ若干傾斜した姿勢で物品Xを受け入れるので、受け入れられた物品Xは受渡台24上で傾斜方向に移動して、移動規制壁24cによって移動を規制されることになる。したがって、受入位置P1で物品Xを位置決めして受け入れることができ、もって集積姿勢が乱れることのない搬送装置1が実現される。
【0064】
そして、物品供給側の搬入コンベア11の搬送面と物品受入側の受渡台24とは略一致して傾斜しているので、搬入コンベア11と受渡台24との間の物品授受は円滑になる。しかも、物品Xは、受渡台24に進入する前から姿勢が傾斜しているので、前述した受渡台24を傾斜させたことによる効果がさらに助長される。
【0065】
なお、本発明は、具体的に詳述した前記実施の形態に限定されることはなく、本発明の趣旨に沿うものであればよい。例えば、傾斜角度α,β,γは具体的数字を用いて示さなかったが、物品Xの搬送や受け渡しが安定して行なわれる範囲で設定される。特に、前記角度β,γはゼロでもよい。
【0066】
そして、集積搬送装置13には一対の平ベルト43,43及びバケット44,45が備えられていたが、それぞれ増設可能である。
【産業上の利用可能性】
【0067】
以上説明したように、本発明によれば、受入位置で物品を位置決めして受け入れることができ、もって集積姿勢が乱れることのない搬送装置が提供される。すなわち、本発明は、物品搬送の技術分野に広く好適である。
【図面の簡単な説明】
【0068】
【図1】本発明の実施の形態に係る搬送装置の側面図である。
【図2】図1のII−II線による矢視図で、搬入コンベアと受渡装置とを示す。
【図3】図2のIII−III線による拡大矢視図で、受渡台の回転構造を示す。
【図4】図1のIV−IV線による拡大断面図で、受渡台の構造を示す。
【図5】図1のVI−VI線による拡大断面図で、集積搬送装置の駆動構造を示す。
【図6】一対のバケット間のオーバーラップ構造を説明するための正面図である。
【図7】同じく側面図である。
【図8】一方のバケットに備えられた仕切部材と底面部材との平面図である。
【図9】他方のバケットに備えられた底面部材の平面図である。
【図10】下部ガイド部材及び上部ガイド機構の平面図である。
【図11】排出装置の平面図である。
【図12】集積動作を説明するための模式的な側面図で、受渡台が新たな物品を受け入れた状態を示す。
【図13】同じく前記受渡台が略水平姿勢とされた状態を示す。
【図14】同じく前記受渡台が物品を下部ガイド部材を介してバケットへ受け渡そうとしている状態を示す。
【図15】同じく前記受渡台が物品をバケットへ受け渡すと共に、後続する受渡台が新たな物品を受け入れた状態を示す。
【図16】従来の搬送装置の平面図である。
【図17】従来の別なる搬送装置の側面図である。
【符号の説明】
【0069】
1 搬送装置
11 搬入コンベア(搬入手段)
12 受渡装置(受渡手段)
24 受渡台
24c 移動規制壁(移動規制部材)
43 平ベルト(搬送手段)
44,45 バケット(保持手段)
P1 受入位置
P2 排出位置
X 物品
d′ 反回動方向
α 傾斜角度
【特許請求の範囲】
【請求項1】
所定の受入位置で外部から供給された物品を受け入れて下流側へ受け渡す受渡手段と、該受渡手段から受け渡された複数の物品を前後に集積した状態に保持する保持手段と、該保持手段を排出位置へ移送する搬送手段とを有する搬送装置であって、
前記受渡手段は、前記受入位置において所定の受入姿勢で1個ずつ物品を受け入れて起立姿勢方向に回動することにより該物品を起立させると共に、前記保持手段に該物品を受け渡す受渡台を備えており、
該受渡台は、前記受入姿勢が水平姿勢から反回動方向へ若干傾斜した姿勢となるように構成されていると共に、
傾斜により低くなる側に、受け入れられた物品の移動を規制する移動規制部材が設けられていることを特徴とする搬送装置。
【請求項2】
前記請求項1または請求項2に記載の搬送装置において、
前記受入位置へ物品を搬入する搬入手段が備えられており、
該搬入手段の搬送面は、前記受渡台の受入姿勢に略一致して傾斜していることを特徴とする搬送装置。
【請求項1】
所定の受入位置で外部から供給された物品を受け入れて下流側へ受け渡す受渡手段と、該受渡手段から受け渡された複数の物品を前後に集積した状態に保持する保持手段と、該保持手段を排出位置へ移送する搬送手段とを有する搬送装置であって、
前記受渡手段は、前記受入位置において所定の受入姿勢で1個ずつ物品を受け入れて起立姿勢方向に回動することにより該物品を起立させると共に、前記保持手段に該物品を受け渡す受渡台を備えており、
該受渡台は、前記受入姿勢が水平姿勢から反回動方向へ若干傾斜した姿勢となるように構成されていると共に、
傾斜により低くなる側に、受け入れられた物品の移動を規制する移動規制部材が設けられていることを特徴とする搬送装置。
【請求項2】
前記請求項1または請求項2に記載の搬送装置において、
前記受入位置へ物品を搬入する搬入手段が備えられており、
該搬入手段の搬送面は、前記受渡台の受入姿勢に略一致して傾斜していることを特徴とする搬送装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2007−137624(P2007−137624A)
【公開日】平成19年6月7日(2007.6.7)
【国際特許分類】
【出願番号】特願2005−335658(P2005−335658)
【出願日】平成17年11月21日(2005.11.21)
【出願人】(000147833)株式会社イシダ (859)
【Fターム(参考)】
【公開日】平成19年6月7日(2007.6.7)
【国際特許分類】
【出願日】平成17年11月21日(2005.11.21)
【出願人】(000147833)株式会社イシダ (859)
【Fターム(参考)】
[ Back to top ]