
搬送装置
【課題】搬送する物品の製造効率を低下させることなく、制御を簡単として貯留する物品の数量に応じた搬送経路長を容易に得ることができ、しかも、搬送ベルトにかかる負荷が軽減でき、構造が簡単でコンパクトな搬送装置を提供する。
【解決手段】保持プーリ14に掛け渡した牽引ベルト12の各端に第1移動部材16と第2移動部材17とを設ける。第1移動部材16に第1可動プーリ18を、第2移動部材17に第2可動プーリ19を設ける。第1駆動プーリ4と、第2駆動プーリ5と、両可動プーリ18,19に無端状の搬送ベルト22を掛け渡して設ける。第1駆動プーリ4のみを停止させたとき、第1移動部材16が両駆動プーリ4,5に接近する方向に移動して搬送ベルト22の往路長が短縮し、第2駆動プーリ5のみを停止させたとき、第2移動部材17が両駆動プーリ4,5に接近する方向に移動して搬送ベルト22の往路長が伸長する。
【解決手段】保持プーリ14に掛け渡した牽引ベルト12の各端に第1移動部材16と第2移動部材17とを設ける。第1移動部材16に第1可動プーリ18を、第2移動部材17に第2可動プーリ19を設ける。第1駆動プーリ4と、第2駆動プーリ5と、両可動プーリ18,19に無端状の搬送ベルト22を掛け渡して設ける。第1駆動プーリ4のみを停止させたとき、第1移動部材16が両駆動プーリ4,5に接近する方向に移動して搬送ベルト22の往路長が短縮し、第2駆動プーリ5のみを停止させたとき、第2移動部材17が両駆動プーリ4,5に接近する方向に移動して搬送ベルト22の往路長が伸長する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、往路に物品を載置して搬送する搬送装置に関する。
【背景技術】
【0002】
例えば、飲料缶や食品缶等の物品の製造ラインにおいては、複数の製造工程を行う各装置間でコンベア等による物品の搬送が行われる。この際、コンベアの下流側に位置する装置が停止すると、当該装置への物品の投入が行えないためにコンベアを停止させる必要があり、これに伴って製造ラインが停止して製造効率が低下する不都合がある。或いは、コンベアを停止させずに、稼働中の上流側の装置から排出される物品をコンベア上に送り込んで滞留させることも考えられるが、物品同士が接触して損傷する等の不都合がある。
【0003】
そこで、従来、入口から出口に至る間の搬送経路長を変化させることができるコンベアが知られている(下記特許文献1参照)。このコンベアは、入口プーリと出口プーリとを備える固定架台に対して移動可能な可動架台が設けられている。可動架台には一対のプーリが同軸に回転自在に支持されている。
【0004】
各プーリには無端状の搬送ベルトが掛け渡されている。搬送ベルトは、入口プーリから可動架台の一方のプーリを経由して出口プーリに至る往路を備えてこの往路が搬送経路とされる。更に、搬送ベルトは、出口プーリから可動架台を越えて折返しプーリで折り返され、可動架台の一方のプーリを経由し、折返しプーリにより折り返されて入口プーリに至る復路が形成されている。
【0005】
出口プーリは駆動モータにより回転駆動され、搬送ベルトは、この駆動モータにより無端回動される。可動架台は駆動装置を備え、この駆動装置により固定架台に対して接近方向又は離反方向に移動される。更に、出口プーリ側には、物品の送り出しを止めるシャッターが設けられている。
【0006】
そして、出口側のシャッターが閉じられ、搬送経路上に物品が満載されている状態で入口側から物品が投入されると、物品が1個投入される毎に可動架台が物品の径の半分だけ固定架台から離反するように移動される。これにより、搬送経路が延長され、多数の物品を貯留することができる。出口側のシャッターが開けられると、可動架台が固定架台に接近する方向に移動し、搬送経路を短縮させつつ物品を送り出す。このようにして、コンベアの入口から出口までの搬送経路上に物品が常時満載されるように搬送経路長を変化させることができるので、上流側或いは下流側の装置の停止に応じて、物品の貯留や送り出しを行うことができ、物品の製造効率の低下を防止することができる。
【特許文献1】特開平5−286552号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかし、上述の従来のコンベアにおいては、物品の搬送速度(即ち、搬送ベルトの回動速度)と可動架台の移動速度とを同期させる必要があるためにその制御が複雑であるだけでなく、搬送経路上に貯留される物品の数量と搬送経路の長さとを精度良く一致させることが難かしい不都合がある。
【0008】
更に、可動架台の一対のプーリが同軸で可動架台と一体に移動され、搬送ベルトの往路側と復路側との両方を可動架台の各プーリに掛け渡された状態とするために、搬送ベルトを複数箇所で屈曲させる必要がある。このため、搬送ベルトにかかる負荷も比較的大きいだけでなく、装置構成が複雑となる不都合がある。
【0009】
本発明は、かかる不都合に鑑みてなされたものであり、搬送する物品の製造効率を低下させることなく、制御を簡単として貯留する物品の数量に応じた搬送経路長を容易に得ることができ、しかも、搬送ベルトにかかる負荷が軽減でき、構造が簡単でコンパクトな搬送装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
かかる目的を達成するために、本発明は、回転自在の第1駆動プーリと、該第1駆動プーリを回転駆動する第1駆動手段と、該第1駆動プーリに所定間隔を存して隣設された回転自在の第2駆動プーリと、該第2駆動プーリを回転駆動する第2駆動手段と、両駆動プーリ間から両駆動プーリに接近・離反する方向に水平移動自在の第1移動部材と、該第1移動部材に回転自在に支持された第1可動プーリと、第1移動部材の下方において該第1移動部材と平行に移動自在の第2移動部材と、該第2移動部材に回転自在に支持された第2可動プーリと、両移動部材を介して両駆動プーリの反対側に設けられた保持プーリと、該保持プーリに掛け渡され、一端が前記第1移動部材に連結され且つ他端が前記第2移動部材に連結されて第1移動部材と第2移動部材とを相対方向に移動させる牽引ベルトと、第1駆動プーリから第1可動プーリを経由して第2駆動プーリに至る間を往路として該往路に物品を載置して搬送し、更に連続して第2駆動プーリから第2可動プーリを経由して第1駆動プーリに至る間を復路として両駆動プーリ乃至両可動プーリに掛け渡された無端状の搬送ベルトとを備え、前記第1駆動手段が第1駆動プーリの駆動を停止したとき、第1移動部材が両駆動プーリに接近する方向に移動し且つ第2移動部材が両駆動プーリから離反する方向に移動して搬送ベルトの往路長が短縮され、前記第2駆動手段が第2駆動プーリの駆動を停止したとき、第2移動部材が両駆動プーリに接近する方向に移動し且つ第1移動部材が両駆動プーリから離反する方向に移動して搬送ベルトの往路長が伸長されることを特徴とする。
【0011】
本発明によれば、第1移動部材が両駆動プーリに接近する位置にあり、且つ第2移動部材が両駆動プーリから離反した位置にあるとき、搬送ベルトの往路長が短縮された状態で該往路により物品を搬送することができる。この状態から、往路上の物品の数を増加させる場合には、第1駆動手段による第1駆動プーリの駆動を維持し、第2駆動手段による第2駆動プーリの駆動を停止する。第2駆動プーリが停止した状態で第1駆動プーリが回転することで、第1駆動プーリと第2駆動プーリとの間の復路側の搬送ベルトに張力が付与され、第2可動プーリを介して第2移動部材が両駆動プーリに接近する方向に引っ張られて移動する。これにより、牽引ベルトを介して第1移動部材が第2移動部材と相対方向(即ち、両駆動プーリから離反する方向)に移動し、第1可動プーリを介して第1駆動プーリと第2駆動プーリとの間の往路側の搬送ベルトが伸長する。このように、往路側の搬送ベルトが伸長しつつ往路上に物品が送り込まれ、往路上の物品の数を増加させることができるので、往路上に多数の物品を貯留することができる。
【0012】
また、搬送ベルトの往路長が伸長された状態から、往路上の物品の数を減少させる場合には、第2駆動手段により第2駆動プーリを駆動し、第1駆動手段による第1駆動プーリの駆動を停止する。第1駆動プーリが停止した状態で第2駆動プーリが回転することで、第1駆動プーリと第2駆動プーリとの間の往路側の搬送ベルトに張力が付与され、第1可動プーリを介して第1移動部材が両駆動プーリに接近する方向に引っ張られて移動する。これにより、牽引ベルトを介して第2移動部材が両駆動プーリから離反する方向に移動し、第1可動プーリを介して第1駆動プーリと第2駆動プーリとの間の往路側の搬送ベルトが短縮される。こうして、往路側の搬送ベルトが短縮しつつ往路上の物品が送り出されるので、往路上に貯留した多数の物品を円滑に下流に送り出すことができる。
【0013】
このように、第1駆動プーリと第2駆動プーリとの何れか一方を停止させるだけで、往路長を伸縮させることができるので、制御が極めて容易であり、精度のよい物品の貯留及び送り出しを行うことができる。しかも、搬送ベルトは、両駆動プーリと両可動プーリとに掛け渡されているだけであるので、搬送ベルトの屈曲箇所が少なく、装置構成が簡単でコンパクトに構成され、しかも、搬送ベルトに掛かる負荷も比較的小さくすることができる。
【0014】
また、本発明において、前記牽引ベルトは無端状に形成されて前記保持プーリと前記第1、第2駆動プーリ側に設けられた他の保持プーリとに掛け渡され、前記第1移動部材は牽引ベルトの往路側に連結され、前記第2移動部材は牽引ベルトの復路側に連結されて第1移動部材と第2移動部材とが相対方向に移動するように設けられていることを特徴とする。これによれば、一対の保持プーリ間で無端状の牽引ベルトを介して第1移動部材と第2移動部材とを確実に相対方向に移動させることができる。
【0015】
また、このとき、前記他の保持プーリ(即ち、前記第1、第2駆動プーリ側に設けられた保持プーリ)は、前記第1駆動手段と前記第2駆動手段とに接続された差動歯車機構を備え、該差動歯車機構は、第1駆動手段及び第2駆動手段が第1駆動プーリ及び第2駆動プーリを駆動しているとき該保持プーリを停止状態とし、前記第1駆動手段が停止したとき該保持プーリを第2駆動プーリと同一回転方向に駆動し、前記第2駆動手段が停止したとき該保持プーリを第1駆動プーリと同一回転方向に駆動することを特徴とする。
【0016】
本発明によれば、前記第1、第2駆動プーリ側に設けられた保持プーリに差動歯車機構を設けて、第1駆動手段及び第2駆動手段から駆動力が伝達されるようにしたので、第1駆動プーリと第2駆動プーリとの何れか一方の停止に同期して当該保持プーリを介して牽引ベルトの回動を駆動することができ、これによって、制御を複雑とすることなく精度良く確実に両移動部材を移動させることができる。しかも、第1駆動プーリや第2駆動プーリの停止に伴って往路側や復路側の搬送ベルトに付与される張力を低減することができるので、搬送ベルトに掛かる負荷を一層軽減して両移動部材を円滑に移動させることができる。
【0017】
なお、本発明における搬送ベルトは、物品を載置可能であって無端状に形成されているものであればよく、例えば、トップチェーンと称される複数の板状エレメントが連結されたものも含む。また、本発明における各駆動プーリは、搬送ベルトに対応する形状のものが選択可能であり、例えば、搬送ベルトとして前記トップチェーンを採用した場合には、前記トップチェーンに歯合するスプロケットを各駆動プーリとして採用する。
【発明を実施するための最良の形態】
【0018】
本発明の一実施形態を図面に基づいて説明する。図1は本実施形態の搬送装置を示す説明的平面図、図2は本実施形態の搬送装置の要部を示す説明的斜視図、図3は移動部材の説明的断面図、図4は差動歯車機構の構成を模式的に示す説明図、図5は搬送ベルトの一部を示す説明図、図6は本実施形態の搬送装置の作動説明図である。
【0019】
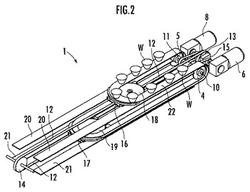
図1に示すように、本実施形態の搬送装置1は、食品容器等の物品Wを製造する製造ラインの一部に設けられ、上流側から物品Wを搬送する入口コンベア2と下流側に向かって物品Wを搬送する出口コンベア3との間に配設される。
【0020】
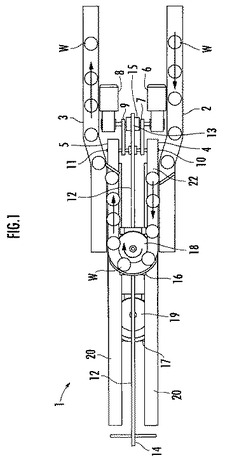
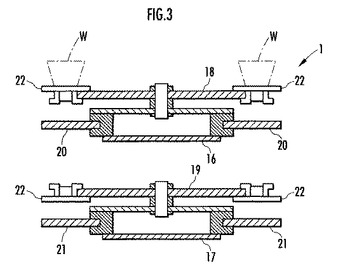
本実施形態の搬送装置1は、図2に示すように、入口側に設けられた回転自在の第1駆動プーリ4と、出口側に設けられた回転自在の第2駆動プーリ5とを備えている。第1駆動プーリ4は第1駆動モータ6(第1駆動手段)により第1駆動ベルト7を介して回転駆動される。第2駆動プーリ5は第2駆動モータ8(第2駆動手段)により第2駆動ベルト9を介して回転駆動される。第1駆動プーリ4の回転軸10と第2駆動プーリ5の回転軸11とは同一軸線上に位置しているが、互いに異なる方向に回転可能とされている。なお、両回転軸10,11及び両駆動モータ6,8は図示しないフレームに支持されている。
【0021】
また、両駆動プーリ4,5の間の位置に沿って無端状の牽引ベルト12が設けられている。該牽引ベルト12は両駆動モータ6,8の間に配設された第1保持プーリ13と、該第1保持プーリ13から所定距離を存して設けられた第2保持プーリ14とに掛け渡されている。第1保持プーリ13は、差動歯車機構15を備えており、差動歯車機構15は第1駆動モータ6及び第2駆動モータ8に接続されている。
【0022】
牽引ベルト12の上側経路(往路)には第1移動部材16が連結され、牽引ベルト12の下側経路(復路)には第2移動部材17が連結されている。第1移動部材16には第1トランスファディスク18(第1可動プーリ)が回転自在に支持されており、第2移動部材17には第2トランスファディスク19(第2可動プーリ)が回転自在に支持されている。
【0023】
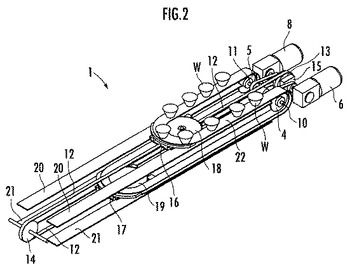
図3に示すように、第1移動部材16は、牽引ベルト12に沿って互いに平行に延設された一対の第1レール部材20間に摺動自在に支持されている。同じように、第2移動部材17は、両第1レール部材20の下方位置で牽引ベルト12に沿って互いに平行に延設された一対の第2レール部材21間に摺動自在に支持されている。第1移動部材16と第2移動部材17とは、牽引ベルト12に連結されていることにより、牽引ベルト12の回動に伴って互いに相対方向に移動する。
【0024】
そして、第1駆動プーリ4、第2駆動プーリ5、第1トランスファディスク18及び第2トランスファディスク19には、無端状の搬送ベルト22が掛け渡されている。即ち、搬送ベルト22は、第1駆動プーリ4から第1トランスファディスク18を経由して第2駆動プーリ5に至る往路と、第2駆動プーリ5から第2トランスファディスク19を経由して第1駆動プーリ4に至る復路とを形成しており、第1駆動プーリ4から第1トランスファディスク18を経由して第2駆動プーリ5に至る往路側に物品Wを載置して搬送する。
【0025】
搬送ベルト22の回動は、第1駆動モータ6による第1駆動プーリ4の回転と第2駆動モータ8による第2駆動プーリ5の回転とによって駆動される。このとき、第1駆動モータ6は入口コンベア2から物品Wを取り込む方向に第1駆動プーリ4を回転させ、第2駆動モータ8は出口コンベア3に物品Wを送り出す方向に第2駆動プーリ5を回転させる。従って、第1駆動プーリ4と第2駆動プーリ5とは互いに逆方向に回転駆動される。
【0026】
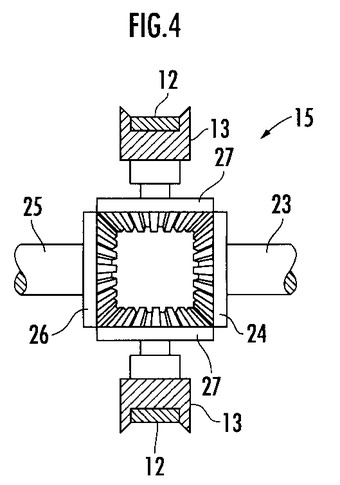
前記差動歯車機構15は、図4に示すように、第1駆動モータ6の回転軸23に連結された第1サイドギヤ24と、第2駆動モータ8の回転軸25に連結されて第1サイドギヤ24に間隔を存して対向する第2サイドギヤ26と、両サイドギヤ24,26間に歯合する複数のピニオン27とを備え、該ピニオン27が前記第1保持プーリ13の内周に回転自在に支持された構成を有している。これによれば、第1駆動モータ6の回転軸23と第2駆動モータ8の回転軸25とが互いに逆方向に同一速度で回転しているとき(即ち、搬送ベルト22が全周にわたって回動しているとき)には、第1サイドギヤ24と第2サイドギヤ26との間でピニオン27が定位置で回転して第1保持プーリ13に回転力が伝達されず、牽引ベルト12が回動されないので第1移動部材16及び第2移動部材17の停止状態が維持される。そして、第1駆動モータ6の回転軸23を回転状態とし、第2駆動モータ8の回転軸25を停止させると、第1サイドギヤ24により回転されたピニオン27が、停止した第2サイドギヤ26に沿って回動し、第1保持プーリ13が第1駆動プーリ4と同じ方向に回転する。これにより、牽引ベルト12を介して第1移動部材16が第1駆動プーリ4から離反する方向に移動される。逆に、第2駆動モータ8の回転軸23を回転状態とし、第1駆動モータ6の回転軸25を停止させると、第1保持プーリ13が第2駆動プーリ5と同じ方向に回転するので、第1移動部材16が第1駆動プーリ4に接近する方向に移動される。
【0027】
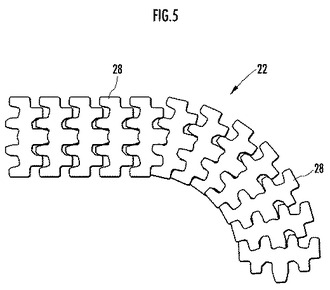
搬送ベルト22は、図5に示すように、複数の板状のエレメント28が揺動自在に連結されることにより無端帯状に形成された所謂トップチェーンであり、図2に示すように、各駆動プーリ4,5の外周に沿って折り返し方向に湾曲自在であると共に、各トランスファディスク18,19の外周に沿って水平方向に湾曲自在となっている。なお、本実施形態においては、トップチェーンである搬送ベルト22の回動を駆動するために、その駆動プーリ4,5としてスプロケットが採用されている。
【0028】
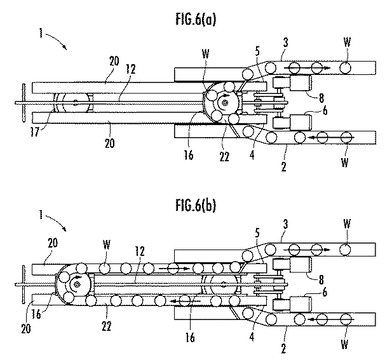
本実施形態の搬送装置1は、以上の構成により、第1トランスファディスク18の移動に伴い、第1駆動プーリ4から第1トランスファディスク18を経由して第2駆動プーリ5に至る往路側の搬送経路の距離を変化させることができる。即ち、図6(a)に示すように、第1移動部材16を両駆動プーリ4,5に接近させておくことで、搬送ベルト22の往路側の距離が短縮された状態となる。
【0029】
この状態から、搬送経路上における物品Wの貯留量(往路側の搬送ベルト22上に載置状態となる物品Wの数量)を増加させる場合には、第1駆動モータ6による第1駆動プーリ4の駆動を維持し、第2駆動モータ8による第2駆動プーリ5の駆動を停止する。第2駆動モータ8の停止に伴い、差動歯車機構15によって第1保持プーリ13が第1駆動プーリ4と同一方向に回転駆動され、牽引ベルト12が回動する。第1保持プーリ13と第1駆動プーリ4とが同一方向に回転することにより、牽引ベルト12を介して第1移動部材16が両駆動プーリ4,5から離反する方向に移動する。同時に、牽引ベルト12を介して第2移動部材17が両駆動プーリ4,5に接近する方向に移動する。これによって、搬送ベルト22が復路側から往路側に繰り出され、図6(b)に示すように、搬送ベルト22の往路側の距離が伸長された状態となる。このとき、第2駆動プーリ5が停止状態であるので、物品Wの出口コンベア3への送り出しは行われず、対して往路側の搬送ベルト22の伸長と第1駆動プーリ4の回転とにより入口コンベア2からの物品Wの供給が行われる。こうして、伸長された往路側の搬送ベルト22上には、物品W同士の間隔を保持した状態で、多数の物品Wが貯留された状態となる。そして、往路側の搬送ベルト22が伸長した状態で第2駆動モータ8による第2駆動プーリ5の駆動を開始することで、往路側の搬送ベルト22上に多数の物品Wを貯留した状態で入口コンベア2から出口コンベア3への物品Wの搬送を行うことができる。
【0030】
また、図6(b)に示す状態から搬送経路の長さを短縮させて図6(a)に示すように搬送経路上の物品Wの貯留量を減少させる場合には、第2駆動モータ8により第2駆動プーリ5を駆動し、第1駆動モータ6による第1駆動プーリ4の駆動を停止する。第1駆動モータ6の停止に伴い、差動歯車機構15によって第1保持プーリ13が第2駆動プーリ5と同一方向に回転駆動され、牽引ベルト12を介して第1移動部材16が両駆動プーリ4,5に接近する方向に移動する。同時に、牽引ベルト12を介して第2移動部材17が両駆動プーリ4,5から離反する方向に移動する。これによって、搬送ベルト22が往路側から復路側に引き込まれ、図6(a)に示すように、搬送ベルト22の往路側の距離が短縮された状態となる。このとき、往路側の搬送ベルト22上に貯留されていた物品Wが出口コンベア3へ送り出されるので、入口コンベア2から物品Wを供給することなく、物品Wを出口コンベア3へ送り出すことができる。
【0031】
なお、本実施形態においては、差動歯車機構15を設けて、第1保持プーリ13に第1駆動モータ6及び第2駆動モータ8からの駆動力が伝達されるようにしたので、両移動部材16,17を第1駆動プーリ4と第2駆動プーリ5との何れか一方の停止に同期して確実且つ精度良く移動させることができ、その制御も単純化することができて有利となっている。
【0032】
一方、例えば、搬送ベルト22の長さが比較的短い場合等では、差動歯車機構15を設けなくてもよい。即ち、図示しないが、第1保持プーリ13を第2保持プーリ14と同じ構成として一層構造簡単とすることができる。この場合には、第1駆動モータ6による第1駆動プーリ4の駆動を維持し、第2駆動モータ8による第2駆動プーリ5の駆動を停止させるだけで、第1駆動プーリ4と第2駆動プーリ5との間の復路側の搬送ベルト22に張力が付与され、第2トランスファディスク19を介して第2移動部材17が両駆動プーリ4,5に接近する方向に引っ張られて移動する。第1移動部材16は牽引ベルト12を介して第2移動部材17と相対方向に移動するので、これによって、往路側の搬送ベルト22を伸長させて物品Wの貯留量を増加させることができる。
【0033】
それとは逆に、第2駆動モータ8による第2駆動プーリ5の駆動を維持し、第1駆動モータ6による第1駆動プーリ4の駆動を停止させるだけで、第1駆動プーリ4と第2駆動プーリ5との間の往路側の搬送ベルト22に張力が付与され、第1トランスファディスク18を介して第1移動部材16が両駆動プーリ4,5に接近する方向に引っ張られて移動する。これによって、往路側の搬送ベルト22を短縮させることができる。
【0034】
更に、差動歯車機構15を設けない場合には、第1保持プーリ13を設けずに第2保持プーリ14のみを設け、牽引ベルト12を無端状とすることなくその一端に第1移動部材16を連結し、他端に第2移動部材17を連結する構成としてもよい。これによっても同様に、第1移動部材16が牽引ベルト12を介して第2移動部材17と相対方向に移動するので、往路側の搬送ベルト22を伸縮させるだけで物品Wの貯留量を増減することが可能となる。
【図面の簡単な説明】
【0035】
【図1】本発明の一実施形態の搬送装置を示す説明的平面図。
【図2】本実施形態の搬送装置の要部を示す説明的斜視図。
【図3】移動部材の説明的断面図。
【図4】差動歯車機構の構成を模式的に示す説明図。
【図5】搬送ベルトの一部を示す説明図。
【図6】本実施形態の搬送装置の要部の作動説明図。
【符号の説明】
【0036】
1…搬送装置、4…第1駆動プーリ、5…第2駆動プーリ、6…第1駆動モータ(第1駆動手段)、8…第2駆動モータ(第2駆動手段)、12…牽引ベルト、13…第1保持プーリ(保持プーリ)、14…第2保持プーリ(他の保持プーリ)、15…差動歯車機構、16…第1移動部材、17…第2移動部材、18…第1トランスファディスク(第1可動プーリ)、19…第2トランスファディスク(第2可動プーリ)、22…搬送ベルト。
【技術分野】
【0001】
本発明は、往路に物品を載置して搬送する搬送装置に関する。
【背景技術】
【0002】
例えば、飲料缶や食品缶等の物品の製造ラインにおいては、複数の製造工程を行う各装置間でコンベア等による物品の搬送が行われる。この際、コンベアの下流側に位置する装置が停止すると、当該装置への物品の投入が行えないためにコンベアを停止させる必要があり、これに伴って製造ラインが停止して製造効率が低下する不都合がある。或いは、コンベアを停止させずに、稼働中の上流側の装置から排出される物品をコンベア上に送り込んで滞留させることも考えられるが、物品同士が接触して損傷する等の不都合がある。
【0003】
そこで、従来、入口から出口に至る間の搬送経路長を変化させることができるコンベアが知られている(下記特許文献1参照)。このコンベアは、入口プーリと出口プーリとを備える固定架台に対して移動可能な可動架台が設けられている。可動架台には一対のプーリが同軸に回転自在に支持されている。
【0004】
各プーリには無端状の搬送ベルトが掛け渡されている。搬送ベルトは、入口プーリから可動架台の一方のプーリを経由して出口プーリに至る往路を備えてこの往路が搬送経路とされる。更に、搬送ベルトは、出口プーリから可動架台を越えて折返しプーリで折り返され、可動架台の一方のプーリを経由し、折返しプーリにより折り返されて入口プーリに至る復路が形成されている。
【0005】
出口プーリは駆動モータにより回転駆動され、搬送ベルトは、この駆動モータにより無端回動される。可動架台は駆動装置を備え、この駆動装置により固定架台に対して接近方向又は離反方向に移動される。更に、出口プーリ側には、物品の送り出しを止めるシャッターが設けられている。
【0006】
そして、出口側のシャッターが閉じられ、搬送経路上に物品が満載されている状態で入口側から物品が投入されると、物品が1個投入される毎に可動架台が物品の径の半分だけ固定架台から離反するように移動される。これにより、搬送経路が延長され、多数の物品を貯留することができる。出口側のシャッターが開けられると、可動架台が固定架台に接近する方向に移動し、搬送経路を短縮させつつ物品を送り出す。このようにして、コンベアの入口から出口までの搬送経路上に物品が常時満載されるように搬送経路長を変化させることができるので、上流側或いは下流側の装置の停止に応じて、物品の貯留や送り出しを行うことができ、物品の製造効率の低下を防止することができる。
【特許文献1】特開平5−286552号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかし、上述の従来のコンベアにおいては、物品の搬送速度(即ち、搬送ベルトの回動速度)と可動架台の移動速度とを同期させる必要があるためにその制御が複雑であるだけでなく、搬送経路上に貯留される物品の数量と搬送経路の長さとを精度良く一致させることが難かしい不都合がある。
【0008】
更に、可動架台の一対のプーリが同軸で可動架台と一体に移動され、搬送ベルトの往路側と復路側との両方を可動架台の各プーリに掛け渡された状態とするために、搬送ベルトを複数箇所で屈曲させる必要がある。このため、搬送ベルトにかかる負荷も比較的大きいだけでなく、装置構成が複雑となる不都合がある。
【0009】
本発明は、かかる不都合に鑑みてなされたものであり、搬送する物品の製造効率を低下させることなく、制御を簡単として貯留する物品の数量に応じた搬送経路長を容易に得ることができ、しかも、搬送ベルトにかかる負荷が軽減でき、構造が簡単でコンパクトな搬送装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
かかる目的を達成するために、本発明は、回転自在の第1駆動プーリと、該第1駆動プーリを回転駆動する第1駆動手段と、該第1駆動プーリに所定間隔を存して隣設された回転自在の第2駆動プーリと、該第2駆動プーリを回転駆動する第2駆動手段と、両駆動プーリ間から両駆動プーリに接近・離反する方向に水平移動自在の第1移動部材と、該第1移動部材に回転自在に支持された第1可動プーリと、第1移動部材の下方において該第1移動部材と平行に移動自在の第2移動部材と、該第2移動部材に回転自在に支持された第2可動プーリと、両移動部材を介して両駆動プーリの反対側に設けられた保持プーリと、該保持プーリに掛け渡され、一端が前記第1移動部材に連結され且つ他端が前記第2移動部材に連結されて第1移動部材と第2移動部材とを相対方向に移動させる牽引ベルトと、第1駆動プーリから第1可動プーリを経由して第2駆動プーリに至る間を往路として該往路に物品を載置して搬送し、更に連続して第2駆動プーリから第2可動プーリを経由して第1駆動プーリに至る間を復路として両駆動プーリ乃至両可動プーリに掛け渡された無端状の搬送ベルトとを備え、前記第1駆動手段が第1駆動プーリの駆動を停止したとき、第1移動部材が両駆動プーリに接近する方向に移動し且つ第2移動部材が両駆動プーリから離反する方向に移動して搬送ベルトの往路長が短縮され、前記第2駆動手段が第2駆動プーリの駆動を停止したとき、第2移動部材が両駆動プーリに接近する方向に移動し且つ第1移動部材が両駆動プーリから離反する方向に移動して搬送ベルトの往路長が伸長されることを特徴とする。
【0011】
本発明によれば、第1移動部材が両駆動プーリに接近する位置にあり、且つ第2移動部材が両駆動プーリから離反した位置にあるとき、搬送ベルトの往路長が短縮された状態で該往路により物品を搬送することができる。この状態から、往路上の物品の数を増加させる場合には、第1駆動手段による第1駆動プーリの駆動を維持し、第2駆動手段による第2駆動プーリの駆動を停止する。第2駆動プーリが停止した状態で第1駆動プーリが回転することで、第1駆動プーリと第2駆動プーリとの間の復路側の搬送ベルトに張力が付与され、第2可動プーリを介して第2移動部材が両駆動プーリに接近する方向に引っ張られて移動する。これにより、牽引ベルトを介して第1移動部材が第2移動部材と相対方向(即ち、両駆動プーリから離反する方向)に移動し、第1可動プーリを介して第1駆動プーリと第2駆動プーリとの間の往路側の搬送ベルトが伸長する。このように、往路側の搬送ベルトが伸長しつつ往路上に物品が送り込まれ、往路上の物品の数を増加させることができるので、往路上に多数の物品を貯留することができる。
【0012】
また、搬送ベルトの往路長が伸長された状態から、往路上の物品の数を減少させる場合には、第2駆動手段により第2駆動プーリを駆動し、第1駆動手段による第1駆動プーリの駆動を停止する。第1駆動プーリが停止した状態で第2駆動プーリが回転することで、第1駆動プーリと第2駆動プーリとの間の往路側の搬送ベルトに張力が付与され、第1可動プーリを介して第1移動部材が両駆動プーリに接近する方向に引っ張られて移動する。これにより、牽引ベルトを介して第2移動部材が両駆動プーリから離反する方向に移動し、第1可動プーリを介して第1駆動プーリと第2駆動プーリとの間の往路側の搬送ベルトが短縮される。こうして、往路側の搬送ベルトが短縮しつつ往路上の物品が送り出されるので、往路上に貯留した多数の物品を円滑に下流に送り出すことができる。
【0013】
このように、第1駆動プーリと第2駆動プーリとの何れか一方を停止させるだけで、往路長を伸縮させることができるので、制御が極めて容易であり、精度のよい物品の貯留及び送り出しを行うことができる。しかも、搬送ベルトは、両駆動プーリと両可動プーリとに掛け渡されているだけであるので、搬送ベルトの屈曲箇所が少なく、装置構成が簡単でコンパクトに構成され、しかも、搬送ベルトに掛かる負荷も比較的小さくすることができる。
【0014】
また、本発明において、前記牽引ベルトは無端状に形成されて前記保持プーリと前記第1、第2駆動プーリ側に設けられた他の保持プーリとに掛け渡され、前記第1移動部材は牽引ベルトの往路側に連結され、前記第2移動部材は牽引ベルトの復路側に連結されて第1移動部材と第2移動部材とが相対方向に移動するように設けられていることを特徴とする。これによれば、一対の保持プーリ間で無端状の牽引ベルトを介して第1移動部材と第2移動部材とを確実に相対方向に移動させることができる。
【0015】
また、このとき、前記他の保持プーリ(即ち、前記第1、第2駆動プーリ側に設けられた保持プーリ)は、前記第1駆動手段と前記第2駆動手段とに接続された差動歯車機構を備え、該差動歯車機構は、第1駆動手段及び第2駆動手段が第1駆動プーリ及び第2駆動プーリを駆動しているとき該保持プーリを停止状態とし、前記第1駆動手段が停止したとき該保持プーリを第2駆動プーリと同一回転方向に駆動し、前記第2駆動手段が停止したとき該保持プーリを第1駆動プーリと同一回転方向に駆動することを特徴とする。
【0016】
本発明によれば、前記第1、第2駆動プーリ側に設けられた保持プーリに差動歯車機構を設けて、第1駆動手段及び第2駆動手段から駆動力が伝達されるようにしたので、第1駆動プーリと第2駆動プーリとの何れか一方の停止に同期して当該保持プーリを介して牽引ベルトの回動を駆動することができ、これによって、制御を複雑とすることなく精度良く確実に両移動部材を移動させることができる。しかも、第1駆動プーリや第2駆動プーリの停止に伴って往路側や復路側の搬送ベルトに付与される張力を低減することができるので、搬送ベルトに掛かる負荷を一層軽減して両移動部材を円滑に移動させることができる。
【0017】
なお、本発明における搬送ベルトは、物品を載置可能であって無端状に形成されているものであればよく、例えば、トップチェーンと称される複数の板状エレメントが連結されたものも含む。また、本発明における各駆動プーリは、搬送ベルトに対応する形状のものが選択可能であり、例えば、搬送ベルトとして前記トップチェーンを採用した場合には、前記トップチェーンに歯合するスプロケットを各駆動プーリとして採用する。
【発明を実施するための最良の形態】
【0018】
本発明の一実施形態を図面に基づいて説明する。図1は本実施形態の搬送装置を示す説明的平面図、図2は本実施形態の搬送装置の要部を示す説明的斜視図、図3は移動部材の説明的断面図、図4は差動歯車機構の構成を模式的に示す説明図、図5は搬送ベルトの一部を示す説明図、図6は本実施形態の搬送装置の作動説明図である。
【0019】
図1に示すように、本実施形態の搬送装置1は、食品容器等の物品Wを製造する製造ラインの一部に設けられ、上流側から物品Wを搬送する入口コンベア2と下流側に向かって物品Wを搬送する出口コンベア3との間に配設される。
【0020】
本実施形態の搬送装置1は、図2に示すように、入口側に設けられた回転自在の第1駆動プーリ4と、出口側に設けられた回転自在の第2駆動プーリ5とを備えている。第1駆動プーリ4は第1駆動モータ6(第1駆動手段)により第1駆動ベルト7を介して回転駆動される。第2駆動プーリ5は第2駆動モータ8(第2駆動手段)により第2駆動ベルト9を介して回転駆動される。第1駆動プーリ4の回転軸10と第2駆動プーリ5の回転軸11とは同一軸線上に位置しているが、互いに異なる方向に回転可能とされている。なお、両回転軸10,11及び両駆動モータ6,8は図示しないフレームに支持されている。
【0021】
また、両駆動プーリ4,5の間の位置に沿って無端状の牽引ベルト12が設けられている。該牽引ベルト12は両駆動モータ6,8の間に配設された第1保持プーリ13と、該第1保持プーリ13から所定距離を存して設けられた第2保持プーリ14とに掛け渡されている。第1保持プーリ13は、差動歯車機構15を備えており、差動歯車機構15は第1駆動モータ6及び第2駆動モータ8に接続されている。
【0022】
牽引ベルト12の上側経路(往路)には第1移動部材16が連結され、牽引ベルト12の下側経路(復路)には第2移動部材17が連結されている。第1移動部材16には第1トランスファディスク18(第1可動プーリ)が回転自在に支持されており、第2移動部材17には第2トランスファディスク19(第2可動プーリ)が回転自在に支持されている。
【0023】
図3に示すように、第1移動部材16は、牽引ベルト12に沿って互いに平行に延設された一対の第1レール部材20間に摺動自在に支持されている。同じように、第2移動部材17は、両第1レール部材20の下方位置で牽引ベルト12に沿って互いに平行に延設された一対の第2レール部材21間に摺動自在に支持されている。第1移動部材16と第2移動部材17とは、牽引ベルト12に連結されていることにより、牽引ベルト12の回動に伴って互いに相対方向に移動する。
【0024】
そして、第1駆動プーリ4、第2駆動プーリ5、第1トランスファディスク18及び第2トランスファディスク19には、無端状の搬送ベルト22が掛け渡されている。即ち、搬送ベルト22は、第1駆動プーリ4から第1トランスファディスク18を経由して第2駆動プーリ5に至る往路と、第2駆動プーリ5から第2トランスファディスク19を経由して第1駆動プーリ4に至る復路とを形成しており、第1駆動プーリ4から第1トランスファディスク18を経由して第2駆動プーリ5に至る往路側に物品Wを載置して搬送する。
【0025】
搬送ベルト22の回動は、第1駆動モータ6による第1駆動プーリ4の回転と第2駆動モータ8による第2駆動プーリ5の回転とによって駆動される。このとき、第1駆動モータ6は入口コンベア2から物品Wを取り込む方向に第1駆動プーリ4を回転させ、第2駆動モータ8は出口コンベア3に物品Wを送り出す方向に第2駆動プーリ5を回転させる。従って、第1駆動プーリ4と第2駆動プーリ5とは互いに逆方向に回転駆動される。
【0026】
前記差動歯車機構15は、図4に示すように、第1駆動モータ6の回転軸23に連結された第1サイドギヤ24と、第2駆動モータ8の回転軸25に連結されて第1サイドギヤ24に間隔を存して対向する第2サイドギヤ26と、両サイドギヤ24,26間に歯合する複数のピニオン27とを備え、該ピニオン27が前記第1保持プーリ13の内周に回転自在に支持された構成を有している。これによれば、第1駆動モータ6の回転軸23と第2駆動モータ8の回転軸25とが互いに逆方向に同一速度で回転しているとき(即ち、搬送ベルト22が全周にわたって回動しているとき)には、第1サイドギヤ24と第2サイドギヤ26との間でピニオン27が定位置で回転して第1保持プーリ13に回転力が伝達されず、牽引ベルト12が回動されないので第1移動部材16及び第2移動部材17の停止状態が維持される。そして、第1駆動モータ6の回転軸23を回転状態とし、第2駆動モータ8の回転軸25を停止させると、第1サイドギヤ24により回転されたピニオン27が、停止した第2サイドギヤ26に沿って回動し、第1保持プーリ13が第1駆動プーリ4と同じ方向に回転する。これにより、牽引ベルト12を介して第1移動部材16が第1駆動プーリ4から離反する方向に移動される。逆に、第2駆動モータ8の回転軸23を回転状態とし、第1駆動モータ6の回転軸25を停止させると、第1保持プーリ13が第2駆動プーリ5と同じ方向に回転するので、第1移動部材16が第1駆動プーリ4に接近する方向に移動される。
【0027】
搬送ベルト22は、図5に示すように、複数の板状のエレメント28が揺動自在に連結されることにより無端帯状に形成された所謂トップチェーンであり、図2に示すように、各駆動プーリ4,5の外周に沿って折り返し方向に湾曲自在であると共に、各トランスファディスク18,19の外周に沿って水平方向に湾曲自在となっている。なお、本実施形態においては、トップチェーンである搬送ベルト22の回動を駆動するために、その駆動プーリ4,5としてスプロケットが採用されている。
【0028】
本実施形態の搬送装置1は、以上の構成により、第1トランスファディスク18の移動に伴い、第1駆動プーリ4から第1トランスファディスク18を経由して第2駆動プーリ5に至る往路側の搬送経路の距離を変化させることができる。即ち、図6(a)に示すように、第1移動部材16を両駆動プーリ4,5に接近させておくことで、搬送ベルト22の往路側の距離が短縮された状態となる。
【0029】
この状態から、搬送経路上における物品Wの貯留量(往路側の搬送ベルト22上に載置状態となる物品Wの数量)を増加させる場合には、第1駆動モータ6による第1駆動プーリ4の駆動を維持し、第2駆動モータ8による第2駆動プーリ5の駆動を停止する。第2駆動モータ8の停止に伴い、差動歯車機構15によって第1保持プーリ13が第1駆動プーリ4と同一方向に回転駆動され、牽引ベルト12が回動する。第1保持プーリ13と第1駆動プーリ4とが同一方向に回転することにより、牽引ベルト12を介して第1移動部材16が両駆動プーリ4,5から離反する方向に移動する。同時に、牽引ベルト12を介して第2移動部材17が両駆動プーリ4,5に接近する方向に移動する。これによって、搬送ベルト22が復路側から往路側に繰り出され、図6(b)に示すように、搬送ベルト22の往路側の距離が伸長された状態となる。このとき、第2駆動プーリ5が停止状態であるので、物品Wの出口コンベア3への送り出しは行われず、対して往路側の搬送ベルト22の伸長と第1駆動プーリ4の回転とにより入口コンベア2からの物品Wの供給が行われる。こうして、伸長された往路側の搬送ベルト22上には、物品W同士の間隔を保持した状態で、多数の物品Wが貯留された状態となる。そして、往路側の搬送ベルト22が伸長した状態で第2駆動モータ8による第2駆動プーリ5の駆動を開始することで、往路側の搬送ベルト22上に多数の物品Wを貯留した状態で入口コンベア2から出口コンベア3への物品Wの搬送を行うことができる。
【0030】
また、図6(b)に示す状態から搬送経路の長さを短縮させて図6(a)に示すように搬送経路上の物品Wの貯留量を減少させる場合には、第2駆動モータ8により第2駆動プーリ5を駆動し、第1駆動モータ6による第1駆動プーリ4の駆動を停止する。第1駆動モータ6の停止に伴い、差動歯車機構15によって第1保持プーリ13が第2駆動プーリ5と同一方向に回転駆動され、牽引ベルト12を介して第1移動部材16が両駆動プーリ4,5に接近する方向に移動する。同時に、牽引ベルト12を介して第2移動部材17が両駆動プーリ4,5から離反する方向に移動する。これによって、搬送ベルト22が往路側から復路側に引き込まれ、図6(a)に示すように、搬送ベルト22の往路側の距離が短縮された状態となる。このとき、往路側の搬送ベルト22上に貯留されていた物品Wが出口コンベア3へ送り出されるので、入口コンベア2から物品Wを供給することなく、物品Wを出口コンベア3へ送り出すことができる。
【0031】
なお、本実施形態においては、差動歯車機構15を設けて、第1保持プーリ13に第1駆動モータ6及び第2駆動モータ8からの駆動力が伝達されるようにしたので、両移動部材16,17を第1駆動プーリ4と第2駆動プーリ5との何れか一方の停止に同期して確実且つ精度良く移動させることができ、その制御も単純化することができて有利となっている。
【0032】
一方、例えば、搬送ベルト22の長さが比較的短い場合等では、差動歯車機構15を設けなくてもよい。即ち、図示しないが、第1保持プーリ13を第2保持プーリ14と同じ構成として一層構造簡単とすることができる。この場合には、第1駆動モータ6による第1駆動プーリ4の駆動を維持し、第2駆動モータ8による第2駆動プーリ5の駆動を停止させるだけで、第1駆動プーリ4と第2駆動プーリ5との間の復路側の搬送ベルト22に張力が付与され、第2トランスファディスク19を介して第2移動部材17が両駆動プーリ4,5に接近する方向に引っ張られて移動する。第1移動部材16は牽引ベルト12を介して第2移動部材17と相対方向に移動するので、これによって、往路側の搬送ベルト22を伸長させて物品Wの貯留量を増加させることができる。
【0033】
それとは逆に、第2駆動モータ8による第2駆動プーリ5の駆動を維持し、第1駆動モータ6による第1駆動プーリ4の駆動を停止させるだけで、第1駆動プーリ4と第2駆動プーリ5との間の往路側の搬送ベルト22に張力が付与され、第1トランスファディスク18を介して第1移動部材16が両駆動プーリ4,5に接近する方向に引っ張られて移動する。これによって、往路側の搬送ベルト22を短縮させることができる。
【0034】
更に、差動歯車機構15を設けない場合には、第1保持プーリ13を設けずに第2保持プーリ14のみを設け、牽引ベルト12を無端状とすることなくその一端に第1移動部材16を連結し、他端に第2移動部材17を連結する構成としてもよい。これによっても同様に、第1移動部材16が牽引ベルト12を介して第2移動部材17と相対方向に移動するので、往路側の搬送ベルト22を伸縮させるだけで物品Wの貯留量を増減することが可能となる。
【図面の簡単な説明】
【0035】
【図1】本発明の一実施形態の搬送装置を示す説明的平面図。
【図2】本実施形態の搬送装置の要部を示す説明的斜視図。
【図3】移動部材の説明的断面図。
【図4】差動歯車機構の構成を模式的に示す説明図。
【図5】搬送ベルトの一部を示す説明図。
【図6】本実施形態の搬送装置の要部の作動説明図。
【符号の説明】
【0036】
1…搬送装置、4…第1駆動プーリ、5…第2駆動プーリ、6…第1駆動モータ(第1駆動手段)、8…第2駆動モータ(第2駆動手段)、12…牽引ベルト、13…第1保持プーリ(保持プーリ)、14…第2保持プーリ(他の保持プーリ)、15…差動歯車機構、16…第1移動部材、17…第2移動部材、18…第1トランスファディスク(第1可動プーリ)、19…第2トランスファディスク(第2可動プーリ)、22…搬送ベルト。
【特許請求の範囲】
【請求項1】
回転自在の第1駆動プーリと、該第1駆動プーリを回転駆動する第1駆動手段と、該第1駆動プーリに所定間隔を存して隣設された回転自在の第2駆動プーリと、該第2駆動プーリを回転駆動する第2駆動手段と、両駆動プーリ間から両駆動プーリに接近・離反する方向に水平移動自在の第1移動部材と、該第1移動部材に回転自在に支持された第1可動プーリと、第1移動部材の下方において該第1移動部材と平行に移動自在の第2移動部材と、該第2移動部材に回転自在に支持された第2可動プーリと、両移動部材を介して両駆動プーリの反対側に設けられた保持プーリと、該保持プーリに掛け渡され、一端が前記第1移動部材に連結され且つ他端が前記第2移動部材に連結されて第1移動部材と第2移動部材とを相対方向に移動させる牽引ベルトと、第1駆動プーリから第1可動プーリを経由して第2駆動プーリに至る間を往路として該往路に物品を載置して搬送し、更に連続して第2駆動プーリから第2可動プーリを経由して第1駆動プーリに至る間を復路として両駆動プーリ乃至両可動プーリに掛け渡された無端状の搬送ベルトとを備え、
前記第1駆動手段が第1駆動プーリの駆動を停止したとき、第1移動部材が両駆動プーリに接近する方向に移動し且つ第2移動部材が両駆動プーリから離反する方向に移動して搬送ベルトの往路長が短縮され、
前記第2駆動手段が第2駆動プーリの駆動を停止したとき、第2移動部材が両駆動プーリに接近する方向に移動し且つ第1移動部材が両駆動プーリから離反する方向に移動して搬送ベルトの往路長が伸長されることを特徴とする搬送装置。
【請求項2】
前記牽引ベルトは無端状に形成されて前記保持プーリと前記第1、第2駆動プーリ側に設けられた他の保持プーリとに掛け渡され、
前記第1移動部材は牽引ベルトの往路側に連結され、前記第2移動部材は牽引ベルトの復路側に連結されて第1移動部材と第2移動部材とが相対方向に移動するように設けられていることを特徴とする請求項1記載の搬送装置。
【請求項3】
前記他の保持プーリは、前記第1駆動手段と前記第2駆動手段とに接続された差動歯車機構を備え、
該差動歯車機構は、第1駆動手段及び第2駆動手段が第1駆動プーリ及び第2駆動プーリを駆動しているとき該保持プーリを停止状態とし、前記第1駆動手段が停止したとき該保持プーリを第2駆動プーリと同一回転方向に駆動し、前記第2駆動手段が停止したとき該保持プーリを第1駆動プーリと同一回転方向に駆動することを特徴とする請求項2記載の搬送装置。
【請求項1】
回転自在の第1駆動プーリと、該第1駆動プーリを回転駆動する第1駆動手段と、該第1駆動プーリに所定間隔を存して隣設された回転自在の第2駆動プーリと、該第2駆動プーリを回転駆動する第2駆動手段と、両駆動プーリ間から両駆動プーリに接近・離反する方向に水平移動自在の第1移動部材と、該第1移動部材に回転自在に支持された第1可動プーリと、第1移動部材の下方において該第1移動部材と平行に移動自在の第2移動部材と、該第2移動部材に回転自在に支持された第2可動プーリと、両移動部材を介して両駆動プーリの反対側に設けられた保持プーリと、該保持プーリに掛け渡され、一端が前記第1移動部材に連結され且つ他端が前記第2移動部材に連結されて第1移動部材と第2移動部材とを相対方向に移動させる牽引ベルトと、第1駆動プーリから第1可動プーリを経由して第2駆動プーリに至る間を往路として該往路に物品を載置して搬送し、更に連続して第2駆動プーリから第2可動プーリを経由して第1駆動プーリに至る間を復路として両駆動プーリ乃至両可動プーリに掛け渡された無端状の搬送ベルトとを備え、
前記第1駆動手段が第1駆動プーリの駆動を停止したとき、第1移動部材が両駆動プーリに接近する方向に移動し且つ第2移動部材が両駆動プーリから離反する方向に移動して搬送ベルトの往路長が短縮され、
前記第2駆動手段が第2駆動プーリの駆動を停止したとき、第2移動部材が両駆動プーリに接近する方向に移動し且つ第1移動部材が両駆動プーリから離反する方向に移動して搬送ベルトの往路長が伸長されることを特徴とする搬送装置。
【請求項2】
前記牽引ベルトは無端状に形成されて前記保持プーリと前記第1、第2駆動プーリ側に設けられた他の保持プーリとに掛け渡され、
前記第1移動部材は牽引ベルトの往路側に連結され、前記第2移動部材は牽引ベルトの復路側に連結されて第1移動部材と第2移動部材とが相対方向に移動するように設けられていることを特徴とする請求項1記載の搬送装置。
【請求項3】
前記他の保持プーリは、前記第1駆動手段と前記第2駆動手段とに接続された差動歯車機構を備え、
該差動歯車機構は、第1駆動手段及び第2駆動手段が第1駆動プーリ及び第2駆動プーリを駆動しているとき該保持プーリを停止状態とし、前記第1駆動手段が停止したとき該保持プーリを第2駆動プーリと同一回転方向に駆動し、前記第2駆動手段が停止したとき該保持プーリを第1駆動プーリと同一回転方向に駆動することを特徴とする請求項2記載の搬送装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2008−50155(P2008−50155A)
【公開日】平成20年3月6日(2008.3.6)
【国際特許分類】
【出願番号】特願2006−230813(P2006−230813)
【出願日】平成18年8月28日(2006.8.28)
【出願人】(505252953)ディ・アイ・エンジニアリング株式会社 (4)
【Fターム(参考)】
【公開日】平成20年3月6日(2008.3.6)
【国際特許分類】
【出願日】平成18年8月28日(2006.8.28)
【出願人】(505252953)ディ・アイ・エンジニアリング株式会社 (4)
【Fターム(参考)】
[ Back to top ]