
搬送装置
【課題】ワークベースの移送速度を任意の速度に容易に変更可能な搬送装置を提供する。
【解決手段】チェーン6に回転自在に取り付けられ、自身の転動面2aにパレット1が載置可能な複数のローラ2を備えた搬送装置10において、チェーン6の全移動行程のうちの一部又は全部において、複数のローラ2をチェーン6の駆動と独立して回転させるローラ駆動手段7と、ローラ駆動手段7の動作速度を制御する制御手段9と、を有する。
【解決手段】チェーン6に回転自在に取り付けられ、自身の転動面2aにパレット1が載置可能な複数のローラ2を備えた搬送装置10において、チェーン6の全移動行程のうちの一部又は全部において、複数のローラ2をチェーン6の駆動と独立して回転させるローラ駆動手段7と、ローラ駆動手段7の動作速度を制御する制御手段9と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ワークをパレット(ワークベース)に載せて搬送する搬送装置に関する。
【背景技術】
【0002】
工作機械の組み立てラインや自動化ライン等において用いられ、ワークをパレットに載せて搬送するフリーフローコンベア装置が知られている(特許文献1参照)。
【0003】
特許文献1には、このようなフリーフローコンベア装置に関して、パレットの搬送速度(すなわちワークの搬送速度)を自由に変更させるようにした発明が開示されている。
【0004】
この特許文献1に開示された発明は、チェーンローラと、チェーンローラに転動自在に載置される摩擦ローラと、摩擦ローラを支持するローラシャフトに装着されたパレットローラとが、チェーンに取り付けられたフリーフローコンベア装置である。このフリーフローコンベア装置では、パレットローラ上に載置されたパレットはチェーンの移動速度とパレットローラの回転速度により移動する。また、この移動速度を変更可能にするために、パレットローラに対し係合・非係合状態となるローラ受けが設けられている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開昭60−252509号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に開示された発明では、パレットの搬送速度を、チェーンの移動速度にパレットローラの回転速度を加算した速度、又は、チェーンの移動速度からパレットローラの回転速度を減算した速度のいずれかの速度に制御することができるものの、その他の任意の速度に変更できなかった。そのため、その他の任意の速度に変更するためにはパレットローラを径の異なるパレットローラに取り替えること等が必要になり、速度調整のための手間がかかった。
【0007】
本発明は、このような技術的課題を鑑みてなされたもので、パレットの搬送速度を任意の速度に容易に変更可能な搬送装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、チェーンに回転自在に取り付けられ、自身の転動面にパレットが載置可能な複数のローラを備えた搬送装置において、前記チェーンの全移動行程のうちの一部又は全部において、前記複数のローラを前記チェーンの駆動と独立して回転させるローラ駆動手段と、前記ローラ駆動手段の動作速度を制御する制御手段と、を有することを特徴とする。
【0009】
を有する
【発明の効果】
【0010】
本発明によれば、パレットを搬送するローラをローラ駆動手段によってチェーンの駆動と独立して回転させるとともに、このローラ駆動手段の動作速度を任意の動作速度に制御している。そのため、パレットの搬送速度を任意の速度に容易に変更することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の一実施形態に係るフリーフローコンベア装置を示す図である。
【図2】可変プレートコンベアを一定速度で移動させる場合を説明する図である。
【図3】可変プレートコンベアを可変速度で移動させる場合を説明する図である。
【図4】フリーフローコンベア装置の第1の使用例を示す図である。
【図5】フリーフローコンベア装置の第2の使用例を示す図である。
【発明を実施するための形態】
【0012】
以下、添付図面を参照しながら本発明の実施形態について説明する。この実施形態では、本発明に係るローラ駆動手段の一例としての可変プレートコンベア7(図1参照)を例に挙げて説明する。
【0013】
(フリーフローコンベア装置)
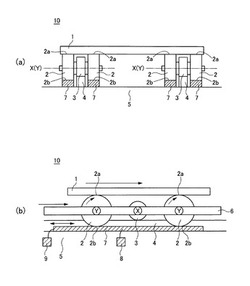
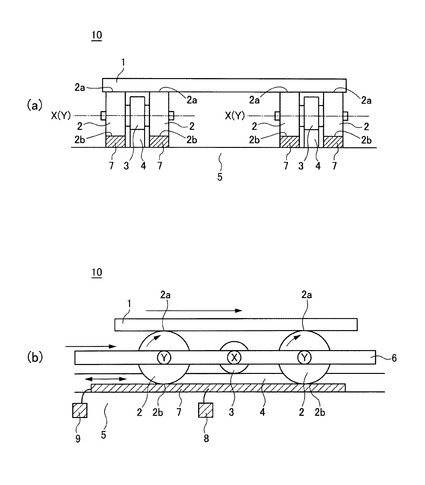
図1は、本発明の一実施形態に係るフリーフローコンベア装置(搬送装置)10を示す図である。図1(a)は側面図を示す。図1(b)は正面図を示す。
【0014】
図1においてフリーフローコンベア装置10は、ワークベース(パレット)1、サイドローラ(複数のローラ)2、センターローラ3、レール4、レールフロア5、チェーン6、可変プレートコンベア(ローラ駆動手段)7、昇降部(昇降手段)8、制御部(制御手段)9等を有する構成である。このような構成によりフリーフローコンベア装置10は、ワークベース1に搬送対象のワーク(不図示)を載置させて搬送する。
【0015】
ワークベース1は、搬送対象のワークを載置するテーブルである。このワークベース1はサイドローラ2の転動面2aに載置される。
【0016】
サイドローラ2は、図1(b)に示すように、チェーン6に取り付けられた円筒形状の回転体であって軸Yを中心に回転自在(回転可能)である。このサイドローラ2は、自身の上側の転動面2aにワークベース1を載置する。また図1(a)に示すように、センターローラ3の両側2箇所に配置されている。なお、図1(b)では2個のサイドローラ2を図示しているが、チェーン6に一定間隔で複数個取り付けられている。
【0017】
センターローラ3は、図1(b)に示すように、チェーン6に取り付けられた円筒形状の回転体であって軸Xを中心に回転自在(回転可能)である。このセンターローラ3は、レール4の上を転動する。また図1(a)に示すように、両側2箇所に配置されている。なお、図1(b)では1個のセンターローラ3のみ図示しているが、チェーン6に一定間隔で複数個取り付けられている。
【0018】
レール4は、工場内の床に配置されるレールフロア5において搬送方向に平行に設けられた一対のレールである。この一対のレール4の上を一対のセンターローラ3は転動する。
【0019】
チェーン6は、駆動源(不図示)により駆動されて、図1(b)の矢印方向(搬送方向)に移動する無端の移動体である。このチェーン6が矢印方向に移動すると、この移動に伴ってセンターローラ3はレール4の上を矢印方向に転動する。また、サイドローラ2はワークベース1との間の摩擦力によって非回転状態でワークベース1を矢印方向に搬送する。
【0020】
可変プレートコンベア7は、サイドローラ2の下方に配置され、チェーン6の搬送方向に対して順方向又は逆方向に移動可能なベルト状の部材である。また、サイドローラ2の下側の転動面2bに対して昇降可能である。つまり、この可変プレートコンベア7を昇降させることで、サイドローラ2に対して接触又は非接触させる位置に選択的に移動させることが可能になっている。なお、図1ではこの可変プレートコンベア7を上昇させた場合の構成を示している。また図1(a)に示すように、サイドローラ2の下側4箇所において搬送方向に平行に配置されている。
【0021】
また、この可変プレートコンベア7は後述の昇降部8や制御部9によってチェーン6の駆動と独立して駆動可能である。そのため、自身(可変プレートコンベア7)をサイドローラ2に対して接触させる位置に上昇させた状態でチェーン6の搬送方向に対して順方向又は逆方向に一定速度で移動させたり、可変速度(変更可能な速度)で移動させたりすることで、通常は非回転状態のサイドローラ2をチェーン6の駆動と独立して強制的に回転させることができる。このサイドローラ2の強制的な回転により、ワークベース1の搬送速度を可変にしている。具体的な内容は後述する。
【0022】
昇降部8は、可変プレートコンベア7の昇降を制御して、これをサイドローラ2に接触又は非接触させる位置に選択的に移動させる。例えば図2の昇降シリンダ11である。具体的な内容は後述する。
【0023】
制御部9は、可変プレートコンベア7の動作(特に動作速度)を制御する。例えば図2のモータ12である。具体的な内容は後述する。なお、この制御部9が可変プレートコンベア7の動作を制御することで、上記の強制的な回転に係るサイドローラ2の回転速度や回転方向が制御される。
【0024】
以上、図1を用いて本実施形態に係るフリーフローコンベア装置10の各構成要素について説明してきた。このようにフリーフローコンベア装置10では、昇降部8が可変プレートコンベア7の昇降動作を制御し、制御部9が可変プレートコンベア7の動作(より詳しくは移動動作)を制御することで、可変プレートコンベア7を一定速度で移動させたり、可変速度で移動させたりする。これにより、ワークベース1の搬送速度を可変にしている。以下、可変プレートコンベア7を一定速度で移動させる場合、可変速度で移動させる場合の各々の動作について順に説明する。
【0025】
(可変プレートコンベア7を一定速度で移動させる場合について)
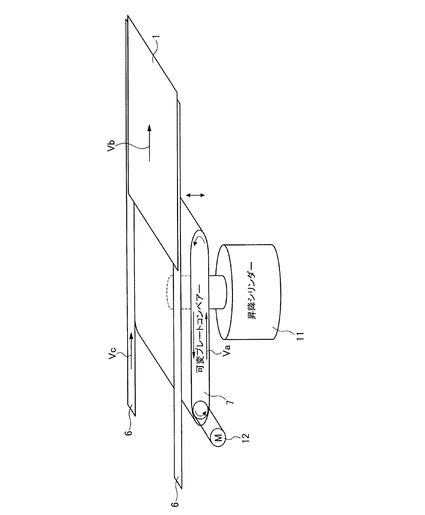
図2は、可変プレートコンベア7を一定速度で移動させる場合を説明する図である。ここでは、可変プレートコンベア7の昇降を切り替える動作及び上昇させた状態で可変プレートコンベア7をチェーン6の搬送方向に対して順方向又は逆方向(ここでは逆方向)に一定速度Vaで移動させる動作について説明する。なお、説明の便宜上、図2では図1に示すフリーフローコンベア装置10の構成要素のうちのワークベース1、チェーン6、可変プレートコンベア7を簡易的に図示する。
【0026】
図2において昇降部8の一例としての昇降シリンダ11が、可変プレートコンベア7に取り付けられている。この昇降シリンダ11は、可変プレートコンベア7を昇降させることで、可変プレートコンベア7をサイドローラ2に対して接触又は非接触させる位置に選択的に移動させる。
【0027】
また、図2において制御部9の一例としてのモータ12が、可変プレートコンベア7に取り付けられている。このモータ12は、可変プレートコンベア7を反時計回り(チェーン6の搬送方向と逆方向)に一定速度Vaで移動させる。
【0028】
このとき、可変プレートコンベア7を下降させてサイドローラ2に対して非接触の位置に移動させる。そうすると、サイドローラ2は非回転状態でワークベース1を載置する。そのため、ワークベース1の搬送速度Vbはチェーン6の移動速度Vcと同一になる(Vb=Vc)。
【0029】
一方、可変プレートコンベア7を上昇させてサイドローラ2に対して接触する位置に移動させる。そうすると、図1に示すように可変プレートコンベア7はサイドローラ2に当接するとともに、サイドローラ2は可変プレートコンベア7の上を転動する。このときサイドローラ2は、チェーン6の移動速度に可変プレートコンベア7の移動速度を加算した回転速度で可変プレートコンベア7の上を図1の矢印方向に転動する。そのため、図2のワークベース1の搬送速度Vbはチェーン6の移動速度Vcにこのサイドローラ2の回転速度(チェーン6の移動速度Vcに可変プレートコンベア7の移動速度Vaを加算した速度)を加算した速度になる。すなわち、ワークベース1の搬送速度Vbは、チェーン6の移動速度Vcの2倍の速度に可変プレートコンベア7の移動速度Vaを加算した速度になる(Vb=2Vc+Va)。
【0030】
以上のように、昇降部8の一例としての昇降シリンダ11が可変プレートコンベア7の昇降を切り替えるとともに、制御部9の一例としてのモータ12が可変プレートコンベア7を一定速度Vaで移動させることで、ワークベース1の搬送速度Vbをチェーン6の移動速度と同一の速度Vc、又は、チェーン6の移動速度Vcの2倍の速度に可変プレートコンベア7の移動速度Vaを加算した速度2Vc+Vaのいずれかに可変にしている。
【0031】
なお、可変プレートコンベア7を時計回り(チェーン6の搬送方向と順方向)に一定速度Vaで移動させたときにも、サイドローラ2(図1参照)は可変プレートコンベア7の上を転動する。この場合にはサイドローラ2は、チェーン6の移動速度から可変プレートコンベア7の移動速度を減算した回転速度で可変プレートコンベア7の上を図1の矢印方向に転動する。そのため、図2のワークベース1の搬送速度Vbはチェーン6の移動速度Vcにこのサイドローラ2の回転速度(チェーン6の移動速度Vcから可変プレートコンベア7の移動速度Vaを減算した速度)を加算した速度になる。すなわち、ワークベース1の搬送速度Vbは、チェーン6の移動速度Vcの2倍の速度から可変プレートコンベア7の移動速度Vaを減算した速度になる(Vb=2Vc―Va)。
【0032】
(可変プレートコンベア7を可変速度で移動させる場合について)
図3は、可変プレートコンベア7を可変速度で移動させる場合を説明する図である。ここでは、昇降部8が可変プレートコンベア7を上昇させた状態で、制御部9が可変プレートコンベア7をチェーン6の搬送方向に対して順方向又は逆方向(ここでは逆方向)に可変速度Vtで移動させる動作について説明する。なお、説明の便宜上、図3では図1に示すフリーフローコンベア装置10の構成要素のうちのワークベース1、チェーン6、可変プレートコンベア7を簡易的に図示している。
【0033】
図3において制御部9の一例としてのモータ12が、図2と同様に、可変プレートコンベア7に取り付けられている。このモータ12は、可変プレートコンベア7を反時計回り(チェーン6の搬送方向と逆方向)に可変速度Vtで移動させる。
【0034】
可変プレートコンベア7を上昇させた状態で可変プレートコンベア7を反時計回りに移動させると、サイドローラ2は可変プレートコンベア7の上を転動する。このとき図2を用いて前述したように、ワークベース1の搬送速度Vbは、チェーン6の移動速度Vcの2倍の速度に可変プレートコンベア7の可変速度Vtを加算した速度になる(Vb=2Vc+Vt)。ここでVtを任意の速度に変更することで、ワークベース1の搬送速度を任意の速度に変更することができる。
【0035】
以上のように、制御部9の一例としてのモータ12が可変プレートコンベア7を反時計回りに可変速度Vtで移動させることで、ワークベース1の搬送速度を任意の速度に変更することができる。
【0036】
なお、可変プレートコンベア7を時計回り(チェーン6の搬送方向と順方向)に可変な移動速度Vtで移動させたときにも、サイドローラ2(図1参照)は可変プレートコンベア7の上を転動する。この場合にも図2を用いて前述したように、ワークベース1の搬送速度Vbは、チェーン6の移動速度Vcの2倍の速度から可変プレートコンベア7の移動速度Vtを減算した速度になる(Vb=2Vc―Vt)。ここでVtを任意の速度に変更することで、ワークベース1の搬送速度を任意の速度に変更することができる。
【0037】
以上、可変プレートコンベア7を一定速度で移動させる場合、可変速度で移動させる場合の各々の動作についてワークベース1の搬送速度の変化とともに説明してきた。このように、昇降部8が可変プレートコンベア7の昇降動作を制御し、制御部9が可変プレートコンベア7の動作(より詳しくは移動動作)を制御することで、ワークベース1の搬送速度が可変になっている。続いて、このような可変プレートコンベア7を備えるフリーフローコンベア装置10の使用例を説明する。
【0038】
(フリーフローコンベア装置10の第1の使用例)
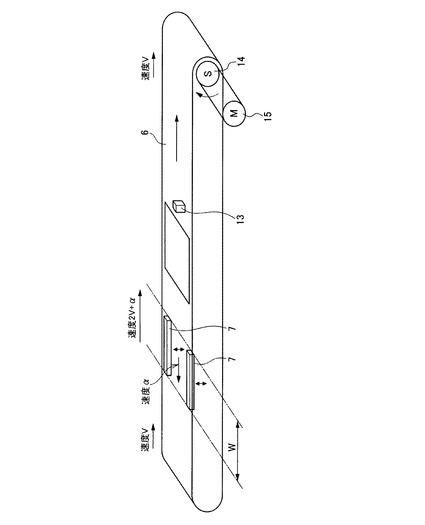
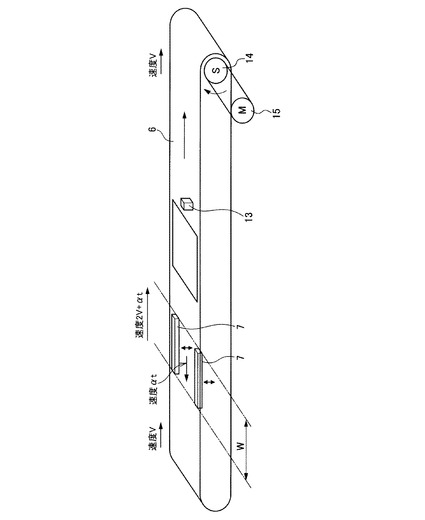
図4は、フリーフローコンベア装置10の第1の使用例を示す図である。ここでは、チェーン6の全移動行程のうちの一部の行程Wに可変プレートコンベア7を配設した状態で、可変プレートコンベア7の上面をチェーン6の搬送方向の逆方向に一定速度αで移動させた場合の使用例を説明する。なお、説明の便宜上、図4では図1に示すフリーフローコンベア装置10の構成要素のうちのチェーン6、可変プレートコンベア7のみを図示している。
【0039】
図4に示すチェーン6はモータ15の駆動により図中の矢印方向に移動する。すなわち、モータ15の駆動に伴いスプロケット14が回転することで、このスプロケット14と噛合するチェーン6は図中の矢印方向に一定速度Vで移動する。
【0040】
ここで、行程Wにおいて可変プレートコンベア7を上昇させてサイドローラ2に対して接触する位置に移動させてさらに可変プレートコンベア7の上面を搬送方向と逆方向に一定速度αで移動させる。そうすると、この行程Wにおいてワークベース1はチェーン6の移動速度Vの2倍の速度2Vに一定速度αを加算した2V+αの速度で搬送される。理由は前述の通りである(図2参照)。
【0041】
以上図4を用いてフリーフローコンベア装置10の第1の使用例について説明してきた。このようにチェーン6の全移動行程のうちのワークベース1の搬送速度を変更したい一部の行程(本使用例では行程W)に可変プレートコンベア7を配設するとともにこの可変プレートコンベア7を上昇させた状態で一定速度αで移動させることで、場所によってワークベース1の搬送速度を速くしたり遅くしたり変更することができる。
【0042】
なお、図4に示すストッパー13は、ワークベース1の搬送を一時的に停止するために設けられた係止部材である。ワークベース1がこのストッパー13によって係止すると、サイドローラ2は空転する。そのため、ワークベース1の搬送が一時的に停止される。このようなストッパー13を用いることで、ワークベース1の搬送速度の速い行程と遅い行程との間に生じる搬送時間差を吸収することができる。
【0043】
(フリーフローコンベア装置10の第2の使用例)
図5は、フリーフローコンベア装置10の第2の使用例を示す図である。前述の第1の使用例では、可変プレートコンベア7をチェーン6の搬送方向の逆方向に一定速度αで移動させた場合を説明した。第2の使用例では、この一定速度αを可変速度αtに変更した場合の使用例を説明する。なお、説明の便宜上、図5では図1に示すフリーフローコンベア装置10の構成要素のうちのチェーン6、可変プレートコンベア7のみを図示している。
【0044】
図5に示すチェーン6は、前述の第1の使用例と同様に、モータ15の駆動により図中の矢印方向に移動する。すなわち、モータ15の駆動に伴いスプロケット14が回転することで、このスプロケット14と噛合するチェーン6は図中の矢印方向に一定速度Vで移動する。
【0045】
ここで、行程Wにおいて可変プレートコンベア7を上昇させてサイドローラ2に対して接触する位置に移動させてさらに可変プレートコンベア7の上面を搬送方向と逆方向に可変速度αtで移動させる。そうすると、この行程Wにおいてワークベース1はチェーン6の移動速度Vの2倍の速度2Vに可変速度αtを加算した2V+αtの速度で搬送される。理由は前述の通りである(図3参照)。
【0046】
以上図5を用いてフリーフローコンベア装置10の第2の使用例について説明してきた。このようにチェーン6の全移動行程のうちのワークベース1の搬送速度を可変にしたい一部の行程(本使用例では行程W)に可変プレートコンベア7を配設するとともにこの可変プレートコンベア7を上昇させた状態で可変速度αtで移動させることで、場所によってワークベース1の搬送速度を速くしたり遅くしたり変更することができる。
【0047】
なお、図5に示すストッパー13は、前述の第1の使用例と同様に、ワークベース1の搬送を一時的に停止するために設けられた係止部材である。ワークベース1がこのストッパー13によって係止すると、サイドローラ2は空転する。そのため、ワークベース1の搬送が一時的に停止される。このようなストッパー13を用いることで、ワークベース1の搬送速度の速い行程と遅い行程との間に生じる搬送時間差を吸収することができる。
【0048】
(まとめ)
以上説明してきた本実施形態に係るフリーフローコンベア装置10によれば、可変プレートコンベア7によってワークベース1を搬送するサイドローラ2をチェーン6の駆動と独立して回転させるとともに、この可変プレートコンベア7の動作速度を制御部9によって任意の動作速度に制御している。そのため、パレットの搬送速度を任意の速度に容易に変更することができる。(請求項1に記載の発明の効果)。
【0049】
また、本実施形態に係るフリーフローコンベア装置10によれば、制御部9(例えばモータ12(図3参照))はサイドローラ2をチェーン6の搬送方向に対して順方向又は逆方向に動作させている。そのため、モータ12を正逆回転させるだけで、他の部材を用いることなく、ワークベース1の搬送速度を変更することができる(請求項2に記載の発明の効果)。
【0050】
また、本実施形態に係るフリーフローコンベア装置10によれば、可変プレートコンベア7はベルト状の部材であり、制御部9はかかるベルト状の部材を駆動させるモータ12である。そのため、このフリーフローコンベア装置10を安価に提供することができる(請求項3に記載の発明の効果)。
【0051】
また、本実施形態に係るフリーフローコンベア装置10によれば、可変プレートコンベア7には、サイドローラ2に接触又は非接触させる位置に選択的に移動させる昇降部8(例えば昇降シリンダ11(図2参照)が設けられている。そのため、このフリーフローコンベア装置10を安価に提供することができる。また、前述のモータ12と組み合わせることで、ワークベース1の搬送速度を任意の速度に容易に変更することができる(請求項4に記載の発明の効果)。
【0052】
以上、本発明の一実施形態について説明したが、上記実施形態は本発明の適用例の一つを示したものであり、本発明の技術的範囲を上記実施形態の具体的構成に限定する趣旨ではない。
【0053】
例えば、上記説明においては、本発明におけるローラ駆動手段が可変プレートコンベア7である場合を例に説明してきたが、この場合に限らない。このローラ駆動手段は、サイドローラ2の各々に取り付けられたモータであってもよい。この場合、ワークベース1の搬送速度を変更したい行程内のサイドローラ2に取り付けられたモータの駆動速度(回転速度)を制御するモータ駆動装置を制御部9として設けることで、場所によってワークベース1の搬送速度を速くしたり遅くしたり変更することができる。
【0054】
また、このローラ駆動手段は、可変プレートコンベア7のようにコンベア形態のものではなく固定型のプレートであってもよい。この場合、この固定型のプレートをチェーン6の搬送方向に対して順方向又は逆方向に移動させるとともに移動速度を制御するプレート搬送装置を制御部9として設けることで、場所によってワークベース1の搬送速度を速くしたり遅くしたり変更することができる。
【0055】
また、例えば、上記各使用例(図4、図5参照)の説明においては、チェーン6の全移動行程のうちの一部の行程Wに可変プレートコンベア7を配設した場合を例に説明してきたが、この場合に限らない。ワークベース1の搬送速度を可変にしたいその他の複数の行程にも同様に可変プレートコンベア7を配設してよい。
【0056】
また、上記のように説明してきた可変プレートコンベア7の制御方法を、フリーフローコンベア装置10が用いられる組み立てラインの種類に応じて変えるようにしてよい。これにより、一つのフリーフローコンベア装置10を異なる種類の組み立てラインに流用することができる。
【符号の説明】
【0057】
1 ワークベース(パレット)
2 サイドローラ(複数のローラ)
3 センターローラ
4 レール
5 レールフロア
6 チェーン
7 可変プレートコンベア(ローラ駆動手段)
8 昇降部(昇降手段)
9 制御部(制御手段)
10 フリーフローコンベア装置(搬送装置)
11 昇降シリンダ
12 モータ
【技術分野】
【0001】
本発明は、ワークをパレット(ワークベース)に載せて搬送する搬送装置に関する。
【背景技術】
【0002】
工作機械の組み立てラインや自動化ライン等において用いられ、ワークをパレットに載せて搬送するフリーフローコンベア装置が知られている(特許文献1参照)。
【0003】
特許文献1には、このようなフリーフローコンベア装置に関して、パレットの搬送速度(すなわちワークの搬送速度)を自由に変更させるようにした発明が開示されている。
【0004】
この特許文献1に開示された発明は、チェーンローラと、チェーンローラに転動自在に載置される摩擦ローラと、摩擦ローラを支持するローラシャフトに装着されたパレットローラとが、チェーンに取り付けられたフリーフローコンベア装置である。このフリーフローコンベア装置では、パレットローラ上に載置されたパレットはチェーンの移動速度とパレットローラの回転速度により移動する。また、この移動速度を変更可能にするために、パレットローラに対し係合・非係合状態となるローラ受けが設けられている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開昭60−252509号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に開示された発明では、パレットの搬送速度を、チェーンの移動速度にパレットローラの回転速度を加算した速度、又は、チェーンの移動速度からパレットローラの回転速度を減算した速度のいずれかの速度に制御することができるものの、その他の任意の速度に変更できなかった。そのため、その他の任意の速度に変更するためにはパレットローラを径の異なるパレットローラに取り替えること等が必要になり、速度調整のための手間がかかった。
【0007】
本発明は、このような技術的課題を鑑みてなされたもので、パレットの搬送速度を任意の速度に容易に変更可能な搬送装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、チェーンに回転自在に取り付けられ、自身の転動面にパレットが載置可能な複数のローラを備えた搬送装置において、前記チェーンの全移動行程のうちの一部又は全部において、前記複数のローラを前記チェーンの駆動と独立して回転させるローラ駆動手段と、前記ローラ駆動手段の動作速度を制御する制御手段と、を有することを特徴とする。
【0009】
を有する
【発明の効果】
【0010】
本発明によれば、パレットを搬送するローラをローラ駆動手段によってチェーンの駆動と独立して回転させるとともに、このローラ駆動手段の動作速度を任意の動作速度に制御している。そのため、パレットの搬送速度を任意の速度に容易に変更することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の一実施形態に係るフリーフローコンベア装置を示す図である。
【図2】可変プレートコンベアを一定速度で移動させる場合を説明する図である。
【図3】可変プレートコンベアを可変速度で移動させる場合を説明する図である。
【図4】フリーフローコンベア装置の第1の使用例を示す図である。
【図5】フリーフローコンベア装置の第2の使用例を示す図である。
【発明を実施するための形態】
【0012】
以下、添付図面を参照しながら本発明の実施形態について説明する。この実施形態では、本発明に係るローラ駆動手段の一例としての可変プレートコンベア7(図1参照)を例に挙げて説明する。
【0013】
(フリーフローコンベア装置)
図1は、本発明の一実施形態に係るフリーフローコンベア装置(搬送装置)10を示す図である。図1(a)は側面図を示す。図1(b)は正面図を示す。
【0014】
図1においてフリーフローコンベア装置10は、ワークベース(パレット)1、サイドローラ(複数のローラ)2、センターローラ3、レール4、レールフロア5、チェーン6、可変プレートコンベア(ローラ駆動手段)7、昇降部(昇降手段)8、制御部(制御手段)9等を有する構成である。このような構成によりフリーフローコンベア装置10は、ワークベース1に搬送対象のワーク(不図示)を載置させて搬送する。
【0015】
ワークベース1は、搬送対象のワークを載置するテーブルである。このワークベース1はサイドローラ2の転動面2aに載置される。
【0016】
サイドローラ2は、図1(b)に示すように、チェーン6に取り付けられた円筒形状の回転体であって軸Yを中心に回転自在(回転可能)である。このサイドローラ2は、自身の上側の転動面2aにワークベース1を載置する。また図1(a)に示すように、センターローラ3の両側2箇所に配置されている。なお、図1(b)では2個のサイドローラ2を図示しているが、チェーン6に一定間隔で複数個取り付けられている。
【0017】
センターローラ3は、図1(b)に示すように、チェーン6に取り付けられた円筒形状の回転体であって軸Xを中心に回転自在(回転可能)である。このセンターローラ3は、レール4の上を転動する。また図1(a)に示すように、両側2箇所に配置されている。なお、図1(b)では1個のセンターローラ3のみ図示しているが、チェーン6に一定間隔で複数個取り付けられている。
【0018】
レール4は、工場内の床に配置されるレールフロア5において搬送方向に平行に設けられた一対のレールである。この一対のレール4の上を一対のセンターローラ3は転動する。
【0019】
チェーン6は、駆動源(不図示)により駆動されて、図1(b)の矢印方向(搬送方向)に移動する無端の移動体である。このチェーン6が矢印方向に移動すると、この移動に伴ってセンターローラ3はレール4の上を矢印方向に転動する。また、サイドローラ2はワークベース1との間の摩擦力によって非回転状態でワークベース1を矢印方向に搬送する。
【0020】
可変プレートコンベア7は、サイドローラ2の下方に配置され、チェーン6の搬送方向に対して順方向又は逆方向に移動可能なベルト状の部材である。また、サイドローラ2の下側の転動面2bに対して昇降可能である。つまり、この可変プレートコンベア7を昇降させることで、サイドローラ2に対して接触又は非接触させる位置に選択的に移動させることが可能になっている。なお、図1ではこの可変プレートコンベア7を上昇させた場合の構成を示している。また図1(a)に示すように、サイドローラ2の下側4箇所において搬送方向に平行に配置されている。
【0021】
また、この可変プレートコンベア7は後述の昇降部8や制御部9によってチェーン6の駆動と独立して駆動可能である。そのため、自身(可変プレートコンベア7)をサイドローラ2に対して接触させる位置に上昇させた状態でチェーン6の搬送方向に対して順方向又は逆方向に一定速度で移動させたり、可変速度(変更可能な速度)で移動させたりすることで、通常は非回転状態のサイドローラ2をチェーン6の駆動と独立して強制的に回転させることができる。このサイドローラ2の強制的な回転により、ワークベース1の搬送速度を可変にしている。具体的な内容は後述する。
【0022】
昇降部8は、可変プレートコンベア7の昇降を制御して、これをサイドローラ2に接触又は非接触させる位置に選択的に移動させる。例えば図2の昇降シリンダ11である。具体的な内容は後述する。
【0023】
制御部9は、可変プレートコンベア7の動作(特に動作速度)を制御する。例えば図2のモータ12である。具体的な内容は後述する。なお、この制御部9が可変プレートコンベア7の動作を制御することで、上記の強制的な回転に係るサイドローラ2の回転速度や回転方向が制御される。
【0024】
以上、図1を用いて本実施形態に係るフリーフローコンベア装置10の各構成要素について説明してきた。このようにフリーフローコンベア装置10では、昇降部8が可変プレートコンベア7の昇降動作を制御し、制御部9が可変プレートコンベア7の動作(より詳しくは移動動作)を制御することで、可変プレートコンベア7を一定速度で移動させたり、可変速度で移動させたりする。これにより、ワークベース1の搬送速度を可変にしている。以下、可変プレートコンベア7を一定速度で移動させる場合、可変速度で移動させる場合の各々の動作について順に説明する。
【0025】
(可変プレートコンベア7を一定速度で移動させる場合について)
図2は、可変プレートコンベア7を一定速度で移動させる場合を説明する図である。ここでは、可変プレートコンベア7の昇降を切り替える動作及び上昇させた状態で可変プレートコンベア7をチェーン6の搬送方向に対して順方向又は逆方向(ここでは逆方向)に一定速度Vaで移動させる動作について説明する。なお、説明の便宜上、図2では図1に示すフリーフローコンベア装置10の構成要素のうちのワークベース1、チェーン6、可変プレートコンベア7を簡易的に図示する。
【0026】
図2において昇降部8の一例としての昇降シリンダ11が、可変プレートコンベア7に取り付けられている。この昇降シリンダ11は、可変プレートコンベア7を昇降させることで、可変プレートコンベア7をサイドローラ2に対して接触又は非接触させる位置に選択的に移動させる。
【0027】
また、図2において制御部9の一例としてのモータ12が、可変プレートコンベア7に取り付けられている。このモータ12は、可変プレートコンベア7を反時計回り(チェーン6の搬送方向と逆方向)に一定速度Vaで移動させる。
【0028】
このとき、可変プレートコンベア7を下降させてサイドローラ2に対して非接触の位置に移動させる。そうすると、サイドローラ2は非回転状態でワークベース1を載置する。そのため、ワークベース1の搬送速度Vbはチェーン6の移動速度Vcと同一になる(Vb=Vc)。
【0029】
一方、可変プレートコンベア7を上昇させてサイドローラ2に対して接触する位置に移動させる。そうすると、図1に示すように可変プレートコンベア7はサイドローラ2に当接するとともに、サイドローラ2は可変プレートコンベア7の上を転動する。このときサイドローラ2は、チェーン6の移動速度に可変プレートコンベア7の移動速度を加算した回転速度で可変プレートコンベア7の上を図1の矢印方向に転動する。そのため、図2のワークベース1の搬送速度Vbはチェーン6の移動速度Vcにこのサイドローラ2の回転速度(チェーン6の移動速度Vcに可変プレートコンベア7の移動速度Vaを加算した速度)を加算した速度になる。すなわち、ワークベース1の搬送速度Vbは、チェーン6の移動速度Vcの2倍の速度に可変プレートコンベア7の移動速度Vaを加算した速度になる(Vb=2Vc+Va)。
【0030】
以上のように、昇降部8の一例としての昇降シリンダ11が可変プレートコンベア7の昇降を切り替えるとともに、制御部9の一例としてのモータ12が可変プレートコンベア7を一定速度Vaで移動させることで、ワークベース1の搬送速度Vbをチェーン6の移動速度と同一の速度Vc、又は、チェーン6の移動速度Vcの2倍の速度に可変プレートコンベア7の移動速度Vaを加算した速度2Vc+Vaのいずれかに可変にしている。
【0031】
なお、可変プレートコンベア7を時計回り(チェーン6の搬送方向と順方向)に一定速度Vaで移動させたときにも、サイドローラ2(図1参照)は可変プレートコンベア7の上を転動する。この場合にはサイドローラ2は、チェーン6の移動速度から可変プレートコンベア7の移動速度を減算した回転速度で可変プレートコンベア7の上を図1の矢印方向に転動する。そのため、図2のワークベース1の搬送速度Vbはチェーン6の移動速度Vcにこのサイドローラ2の回転速度(チェーン6の移動速度Vcから可変プレートコンベア7の移動速度Vaを減算した速度)を加算した速度になる。すなわち、ワークベース1の搬送速度Vbは、チェーン6の移動速度Vcの2倍の速度から可変プレートコンベア7の移動速度Vaを減算した速度になる(Vb=2Vc―Va)。
【0032】
(可変プレートコンベア7を可変速度で移動させる場合について)
図3は、可変プレートコンベア7を可変速度で移動させる場合を説明する図である。ここでは、昇降部8が可変プレートコンベア7を上昇させた状態で、制御部9が可変プレートコンベア7をチェーン6の搬送方向に対して順方向又は逆方向(ここでは逆方向)に可変速度Vtで移動させる動作について説明する。なお、説明の便宜上、図3では図1に示すフリーフローコンベア装置10の構成要素のうちのワークベース1、チェーン6、可変プレートコンベア7を簡易的に図示している。
【0033】
図3において制御部9の一例としてのモータ12が、図2と同様に、可変プレートコンベア7に取り付けられている。このモータ12は、可変プレートコンベア7を反時計回り(チェーン6の搬送方向と逆方向)に可変速度Vtで移動させる。
【0034】
可変プレートコンベア7を上昇させた状態で可変プレートコンベア7を反時計回りに移動させると、サイドローラ2は可変プレートコンベア7の上を転動する。このとき図2を用いて前述したように、ワークベース1の搬送速度Vbは、チェーン6の移動速度Vcの2倍の速度に可変プレートコンベア7の可変速度Vtを加算した速度になる(Vb=2Vc+Vt)。ここでVtを任意の速度に変更することで、ワークベース1の搬送速度を任意の速度に変更することができる。
【0035】
以上のように、制御部9の一例としてのモータ12が可変プレートコンベア7を反時計回りに可変速度Vtで移動させることで、ワークベース1の搬送速度を任意の速度に変更することができる。
【0036】
なお、可変プレートコンベア7を時計回り(チェーン6の搬送方向と順方向)に可変な移動速度Vtで移動させたときにも、サイドローラ2(図1参照)は可変プレートコンベア7の上を転動する。この場合にも図2を用いて前述したように、ワークベース1の搬送速度Vbは、チェーン6の移動速度Vcの2倍の速度から可変プレートコンベア7の移動速度Vtを減算した速度になる(Vb=2Vc―Vt)。ここでVtを任意の速度に変更することで、ワークベース1の搬送速度を任意の速度に変更することができる。
【0037】
以上、可変プレートコンベア7を一定速度で移動させる場合、可変速度で移動させる場合の各々の動作についてワークベース1の搬送速度の変化とともに説明してきた。このように、昇降部8が可変プレートコンベア7の昇降動作を制御し、制御部9が可変プレートコンベア7の動作(より詳しくは移動動作)を制御することで、ワークベース1の搬送速度が可変になっている。続いて、このような可変プレートコンベア7を備えるフリーフローコンベア装置10の使用例を説明する。
【0038】
(フリーフローコンベア装置10の第1の使用例)
図4は、フリーフローコンベア装置10の第1の使用例を示す図である。ここでは、チェーン6の全移動行程のうちの一部の行程Wに可変プレートコンベア7を配設した状態で、可変プレートコンベア7の上面をチェーン6の搬送方向の逆方向に一定速度αで移動させた場合の使用例を説明する。なお、説明の便宜上、図4では図1に示すフリーフローコンベア装置10の構成要素のうちのチェーン6、可変プレートコンベア7のみを図示している。
【0039】
図4に示すチェーン6はモータ15の駆動により図中の矢印方向に移動する。すなわち、モータ15の駆動に伴いスプロケット14が回転することで、このスプロケット14と噛合するチェーン6は図中の矢印方向に一定速度Vで移動する。
【0040】
ここで、行程Wにおいて可変プレートコンベア7を上昇させてサイドローラ2に対して接触する位置に移動させてさらに可変プレートコンベア7の上面を搬送方向と逆方向に一定速度αで移動させる。そうすると、この行程Wにおいてワークベース1はチェーン6の移動速度Vの2倍の速度2Vに一定速度αを加算した2V+αの速度で搬送される。理由は前述の通りである(図2参照)。
【0041】
以上図4を用いてフリーフローコンベア装置10の第1の使用例について説明してきた。このようにチェーン6の全移動行程のうちのワークベース1の搬送速度を変更したい一部の行程(本使用例では行程W)に可変プレートコンベア7を配設するとともにこの可変プレートコンベア7を上昇させた状態で一定速度αで移動させることで、場所によってワークベース1の搬送速度を速くしたり遅くしたり変更することができる。
【0042】
なお、図4に示すストッパー13は、ワークベース1の搬送を一時的に停止するために設けられた係止部材である。ワークベース1がこのストッパー13によって係止すると、サイドローラ2は空転する。そのため、ワークベース1の搬送が一時的に停止される。このようなストッパー13を用いることで、ワークベース1の搬送速度の速い行程と遅い行程との間に生じる搬送時間差を吸収することができる。
【0043】
(フリーフローコンベア装置10の第2の使用例)
図5は、フリーフローコンベア装置10の第2の使用例を示す図である。前述の第1の使用例では、可変プレートコンベア7をチェーン6の搬送方向の逆方向に一定速度αで移動させた場合を説明した。第2の使用例では、この一定速度αを可変速度αtに変更した場合の使用例を説明する。なお、説明の便宜上、図5では図1に示すフリーフローコンベア装置10の構成要素のうちのチェーン6、可変プレートコンベア7のみを図示している。
【0044】
図5に示すチェーン6は、前述の第1の使用例と同様に、モータ15の駆動により図中の矢印方向に移動する。すなわち、モータ15の駆動に伴いスプロケット14が回転することで、このスプロケット14と噛合するチェーン6は図中の矢印方向に一定速度Vで移動する。
【0045】
ここで、行程Wにおいて可変プレートコンベア7を上昇させてサイドローラ2に対して接触する位置に移動させてさらに可変プレートコンベア7の上面を搬送方向と逆方向に可変速度αtで移動させる。そうすると、この行程Wにおいてワークベース1はチェーン6の移動速度Vの2倍の速度2Vに可変速度αtを加算した2V+αtの速度で搬送される。理由は前述の通りである(図3参照)。
【0046】
以上図5を用いてフリーフローコンベア装置10の第2の使用例について説明してきた。このようにチェーン6の全移動行程のうちのワークベース1の搬送速度を可変にしたい一部の行程(本使用例では行程W)に可変プレートコンベア7を配設するとともにこの可変プレートコンベア7を上昇させた状態で可変速度αtで移動させることで、場所によってワークベース1の搬送速度を速くしたり遅くしたり変更することができる。
【0047】
なお、図5に示すストッパー13は、前述の第1の使用例と同様に、ワークベース1の搬送を一時的に停止するために設けられた係止部材である。ワークベース1がこのストッパー13によって係止すると、サイドローラ2は空転する。そのため、ワークベース1の搬送が一時的に停止される。このようなストッパー13を用いることで、ワークベース1の搬送速度の速い行程と遅い行程との間に生じる搬送時間差を吸収することができる。
【0048】
(まとめ)
以上説明してきた本実施形態に係るフリーフローコンベア装置10によれば、可変プレートコンベア7によってワークベース1を搬送するサイドローラ2をチェーン6の駆動と独立して回転させるとともに、この可変プレートコンベア7の動作速度を制御部9によって任意の動作速度に制御している。そのため、パレットの搬送速度を任意の速度に容易に変更することができる。(請求項1に記載の発明の効果)。
【0049】
また、本実施形態に係るフリーフローコンベア装置10によれば、制御部9(例えばモータ12(図3参照))はサイドローラ2をチェーン6の搬送方向に対して順方向又は逆方向に動作させている。そのため、モータ12を正逆回転させるだけで、他の部材を用いることなく、ワークベース1の搬送速度を変更することができる(請求項2に記載の発明の効果)。
【0050】
また、本実施形態に係るフリーフローコンベア装置10によれば、可変プレートコンベア7はベルト状の部材であり、制御部9はかかるベルト状の部材を駆動させるモータ12である。そのため、このフリーフローコンベア装置10を安価に提供することができる(請求項3に記載の発明の効果)。
【0051】
また、本実施形態に係るフリーフローコンベア装置10によれば、可変プレートコンベア7には、サイドローラ2に接触又は非接触させる位置に選択的に移動させる昇降部8(例えば昇降シリンダ11(図2参照)が設けられている。そのため、このフリーフローコンベア装置10を安価に提供することができる。また、前述のモータ12と組み合わせることで、ワークベース1の搬送速度を任意の速度に容易に変更することができる(請求項4に記載の発明の効果)。
【0052】
以上、本発明の一実施形態について説明したが、上記実施形態は本発明の適用例の一つを示したものであり、本発明の技術的範囲を上記実施形態の具体的構成に限定する趣旨ではない。
【0053】
例えば、上記説明においては、本発明におけるローラ駆動手段が可変プレートコンベア7である場合を例に説明してきたが、この場合に限らない。このローラ駆動手段は、サイドローラ2の各々に取り付けられたモータであってもよい。この場合、ワークベース1の搬送速度を変更したい行程内のサイドローラ2に取り付けられたモータの駆動速度(回転速度)を制御するモータ駆動装置を制御部9として設けることで、場所によってワークベース1の搬送速度を速くしたり遅くしたり変更することができる。
【0054】
また、このローラ駆動手段は、可変プレートコンベア7のようにコンベア形態のものではなく固定型のプレートであってもよい。この場合、この固定型のプレートをチェーン6の搬送方向に対して順方向又は逆方向に移動させるとともに移動速度を制御するプレート搬送装置を制御部9として設けることで、場所によってワークベース1の搬送速度を速くしたり遅くしたり変更することができる。
【0055】
また、例えば、上記各使用例(図4、図5参照)の説明においては、チェーン6の全移動行程のうちの一部の行程Wに可変プレートコンベア7を配設した場合を例に説明してきたが、この場合に限らない。ワークベース1の搬送速度を可変にしたいその他の複数の行程にも同様に可変プレートコンベア7を配設してよい。
【0056】
また、上記のように説明してきた可変プレートコンベア7の制御方法を、フリーフローコンベア装置10が用いられる組み立てラインの種類に応じて変えるようにしてよい。これにより、一つのフリーフローコンベア装置10を異なる種類の組み立てラインに流用することができる。
【符号の説明】
【0057】
1 ワークベース(パレット)
2 サイドローラ(複数のローラ)
3 センターローラ
4 レール
5 レールフロア
6 チェーン
7 可変プレートコンベア(ローラ駆動手段)
8 昇降部(昇降手段)
9 制御部(制御手段)
10 フリーフローコンベア装置(搬送装置)
11 昇降シリンダ
12 モータ
【特許請求の範囲】
【請求項1】
チェーンに回転自在に取り付けられ、自身の転動面にパレットが載置可能な複数のローラを備えた搬送装置において、
前記チェーンの全移動行程のうちの一部又は全部において、前記複数のローラを前記チェーンの駆動と独立して回転させるローラ駆動手段と、
前記ローラ駆動手段の動作速度を制御する制御手段と、
を有することを特徴とする搬送装置。
【請求項2】
前記制御手段は、前記ローラ駆動手段を前記チェーンの搬送方向に対して順方向又は逆方向に動作させることを特徴とする請求項1に記載の搬送装置。
【請求項3】
前記ローラ駆動手段は、前記複数のローラの転動面に接触されて前記ローラを前記チェーンの駆動と独立して回動させるベルト状の部材であり、前記制御手段は、前記ベルト状部材を駆動するモータであることを特徴とする請求項1又は2に記載の搬送装置。
【請求項4】
前記ローラ駆動手段は、前記複数のローラに接触又は非接触させる位置に選択的に移動させる昇降手段をさらに有することを特徴とする請求項1乃至3のいずれか一項に記載の搬送装置。
【請求項1】
チェーンに回転自在に取り付けられ、自身の転動面にパレットが載置可能な複数のローラを備えた搬送装置において、
前記チェーンの全移動行程のうちの一部又は全部において、前記複数のローラを前記チェーンの駆動と独立して回転させるローラ駆動手段と、
前記ローラ駆動手段の動作速度を制御する制御手段と、
を有することを特徴とする搬送装置。
【請求項2】
前記制御手段は、前記ローラ駆動手段を前記チェーンの搬送方向に対して順方向又は逆方向に動作させることを特徴とする請求項1に記載の搬送装置。
【請求項3】
前記ローラ駆動手段は、前記複数のローラの転動面に接触されて前記ローラを前記チェーンの駆動と独立して回動させるベルト状の部材であり、前記制御手段は、前記ベルト状部材を駆動するモータであることを特徴とする請求項1又は2に記載の搬送装置。
【請求項4】
前記ローラ駆動手段は、前記複数のローラに接触又は非接触させる位置に選択的に移動させる昇降手段をさらに有することを特徴とする請求項1乃至3のいずれか一項に記載の搬送装置。
【図1】


【図2】
【図3】

【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2010−235276(P2010−235276A)
【公開日】平成22年10月21日(2010.10.21)
【国際特許分類】
【出願番号】特願2009−86296(P2009−86296)
【出願日】平成21年3月31日(2009.3.31)
【出願人】(000231350)ジヤトコ株式会社 (899)
【Fターム(参考)】
【公開日】平成22年10月21日(2010.10.21)
【国際特許分類】
【出願日】平成21年3月31日(2009.3.31)
【出願人】(000231350)ジヤトコ株式会社 (899)
【Fターム(参考)】
[ Back to top ]