
搬送装置
【課題】可変一定長の移送物品を高速搬送するのに適した仕切り板の間隔調整手段を備えた可変長物品の搬送装置を提供する。
【解決手段】可変長移送物品の移送方向の後側に配置されるとともに第一の環状長尺体に固定される第一の仕切り板と可変長移送物品の移送方向の前側に配置されるとともに第二の環状長尺体に固定される第二の仕切り板との間隔は、第二の駆動輪を第一の駆動輪に連結するときに連結角度調整機構によって可変長移送物品の前後寸法に対応するよう調整され、可変長移送物品は環状長尺体の移動前端部で第一の仕切り板と第二の仕切り板の間に搭載され、環状長尺体の移動後端部で取り出される。
【解決手段】可変長移送物品の移送方向の後側に配置されるとともに第一の環状長尺体に固定される第一の仕切り板と可変長移送物品の移送方向の前側に配置されるとともに第二の環状長尺体に固定される第二の仕切り板との間隔は、第二の駆動輪を第一の駆動輪に連結するときに連結角度調整機構によって可変長移送物品の前後寸法に対応するよう調整され、可変長移送物品は環状長尺体の移動前端部で第一の仕切り板と第二の仕切り板の間に搭載され、環状長尺体の移動後端部で取り出される。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、例えば小物物品が投入される梱包用のカートンボックスを順次作業ステーションへ移送するコンベア等の搬送装置の改良、特にコンベアの急加速や急減速に対する移送物品の揺動を抑制するようにした可変長物品の搬送装置に関するものである。
【背景技術】
【0002】
移送物品の高速搬送を行うためには、コンベア上で移送物品が移動したり、揺動したりすることを防止することが重要である。例えば、包装機械を通って移行経路に沿い複数の容器を搬送する為のラグ付きコンベヤチェーンのピッチを選択的に変える方法であって、該コンベヤチェーンは包装機械上に支持されており且つその上で容器を運ぶ為のコンベヤチェーンの少なくとも一部に沿って概略水平な輸送面を有し、この方法は、コンベヤチェーンを移行経路に沿って移動する、そのコンベヤチェーンはその長さに沿って離間した一連のラグを有している(例えば、特許文献1参照)。
【0003】
また、そのラグのそれぞれをコンベヤチェーンの輸送面に沿って輸送面に対し平行な下降位置に案内する。また、そのラグの少なくとも一つをそのコンベヤチェーンの長さの少なくとも一部に沿って輸送面上に延ばされた上昇位置へと選択的に押しやる工程よりなり、それによって、そのラグのピッチを、コンベヤチェーン輸送面の長さに沿って変えるため、そのラグのそれぞれを下降位置から上昇位置へと個別に押しやれることができる。
要は、コンベアチェーンに設けられた多数の仕切り板(ラグ)を選択的に有効にして、搬送物品の前後を仕切り板で分離する方法であって、多数の仕切り板を所定間隔で選択すれば仕切り間隔が狭くなり、飛び飛びで仕切り板を選択すれば仕切り間隔が広くなるようになっている。
【0004】
【特許文献1】特表平11−500984号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
特許文献1による包装機械によれば、機械の運転中において仕切り板(ラグ)の間隔を変更設定することができる特徴があるが、仕切り板の間隔を例えば数mm単位で微調整することが困難であり、その間隔は仕切り板の設置間隔以下にはならない問題点がある。
従って、カートンボックスの前後に仕切り板を置いて搬送しようとした場合に、カートンボックスの前後に隙間が発生し、搬送中の移動・揺動が発生する問題点がある。
【0006】
この発明の第一の目的は可変一定長の移送物品を高速搬送するのに適した仕切り板の間隔調整手段を備えた可変長物品の搬送装置を提供することである。
この発明の第二の目的は手軽な段取り替え作業によって、移送物品の前後寸法の変化に対応することができる仕切り板の間隔調整手段を備えた可変長物品の搬送装置を提供することである。
【課題を解決するための手段】
【0007】
この発明に係る搬送装置は、モータにより駆動輪を介して循環駆動される環状長尺体を備え、上記環状長尺体上に搭載された一定長の可変長移送物品を前後方向に移送する搬送装置であって、上記駆動輪は上記モータに連結された回転駆動軸に固定される第一の駆動輪および上記第一の駆動輪と連結角度調整機構を介して連結される第二の駆動輪を備え、上記環状長尺体は上記第一の駆動輪により駆動される第一の環状長尺体および上記第2の駆動輪により駆動される第二の環状長尺体を備え、上記可変長移送物品の移送方向の後側に配置されるとともに上記第一の環状長尺体に固定される第一の仕切り板および上記可変長移送物品の移送方向の前側に配置されるとともに上記第二の環状長尺体に固定される第二の仕切り板を備え、上記第一の仕切り板と上記第二の仕切り板の間隔は、上記第二の駆動輪を上記第一の駆動輪に連結するときに上記連結角度調整機構によって上記可変長移送物品の前後寸法に対応するよう調整され、上記可変長移送物品は上記環状長尺体の移動前端部で上記第一の仕切り板と上記第二の仕切り板の間に搭載され、上記環状長尺体の移動後端部で取り出される。
【発明の効果】
【0008】
この発明に係る搬送装置は、可変長移送物品の前に第二の仕切り板且つ後に第一の仕切り板が配置され、第一の仕切り板と第二の仕切り板の間隔は可変長移送物品の前後寸法に応じて連結角度調整機構によって自由に調整されるので、モータを急加速・急減速したときにも、可変長移送物品の位置を安定することができるので、高速・高能率の運転を行うことができるという効果を奏する。
【発明を実施するための最良の形態】
【0009】
実施の形態1.
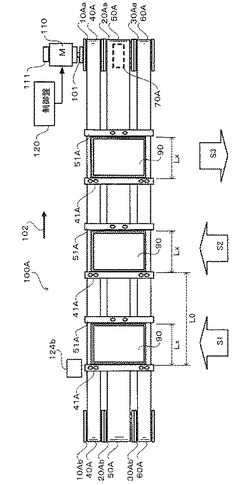
図1は、この発明の実施の形態1に係る搬送装置100Aの上面図である。図2は、この発明の実施の形態1に係る搬送装置100Aの側面図である。
この発明の実施の形態1に係る搬送装置100Aの構成を詳細に説明する。
図1と図2において、第一の駆動輪10Aaと第一の従動輪10Abはタイミングベルトである第一の環状長尺体40Aが張架されるプーリであり、第二の駆動輪20Aaと第二の従動輪20Abはタイミングベルトである第二の環状長尺体50Aが張架されるプーリであり、第三の駆動輪30Aaと第三の従動輪30Abはタイミングベルトである第三の環状長尺体60Aが張架されるプーリである。
第一の駆動輪10Aa、第二の駆動輪20Aaおよび第三の駆動輪30Aaは、減速機を内蔵したサーボモータ110から回転駆動軸101を介して一体駆動されて、各長尺体は移動方向102の方向に並行移動される。
このサーボモータ110は、モータの回転角度を検出するエンコーダ111を備え、図7で後述する制御盤120によって駆動制御される。
また、回転駆動軸101は図2で示す静止体80aによって軸承されていると共に、図示しない従動軸は図2で示す静止体80bに固定されて、第一の従動輪10Ab、第二の従動輪20Abおよび第三の従動輪30Abはこの従動軸に対して互いに自由に転動することができる。
第二の環状長尺体50Aは、第一の環状長尺体40Aと第三の環状長尺体60Aの間に位置し、第二の駆動輪20Aaと回転駆動軸101との連結角度は図3と図4で後述する連結角度調整機構70Aによって調整される。
【0010】
第一の仕切り板41Aは図6で後述するとおり、第一の環状長尺体40Aと第三の環状長尺体60A間に跨って設置されたプロファイルであり、このプロファイルは第一の環状長尺体40Aと第三の環状長尺体60Aの周面に所定の設置間隔L0をおいて均等に設置されている。
第二の仕切り板51Aは図5で後述するとおり、第二の環状長尺体50Aに設置されたプロファイルであり、このプロファイルも第二の環状長尺体50Aの周面に所定の設置間隔L0をおいて均等に設置されているが、第一の仕切り板41Aとの間には可変長移送物品90の前後寸法Lxに相当した間隔が設けられている。
【0011】
開始ステーションS1は、可変長移送物品90が側面または上方から各長尺体上に搭載される作業ステーションであり、仕切到来センサ124bは第一の仕切り板41Aが開始ステーションS1に到来したことを検出する。
付加ステーションS2は、例えば可変長移送物品90が梱包容器であって、この梱包容器に対して収納物品を投入する作業ステーションとなっている。
終了ステーションS3は、可変長移送物品90を側面または上方へ取り出す作業ステーションである。
なお、開始ステーションS1と終了ステーションS3との間に複数の付加ステーションS2を設けても良い。
【0012】
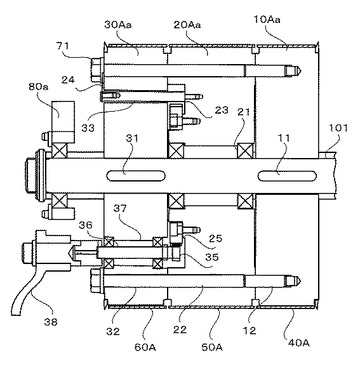
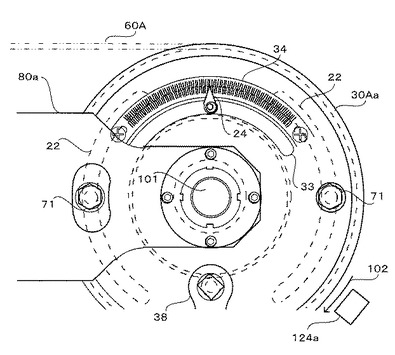
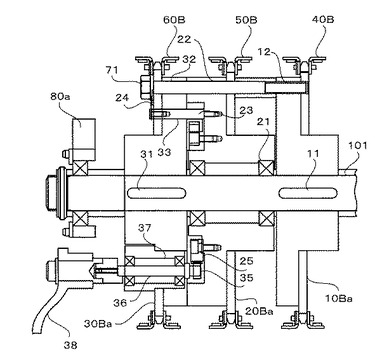
図3は、この発明の実施の形態1に係る搬送装置の連結角度調整機構の断面図である。図4は、この発明の実施の形態1に係る搬送装置の連結角度調整機構の側面図である。
次に、この発明の実施の形態1に係る搬送装置の連結角度調整機構を図3と図4とを参照して説明する。
図3と図4において、静止体80aによって軸承されている回転駆動軸101にはキー11、31が設けられていて、第一の駆動輪10Aaはキー11によって回り止めされ、第三の駆動輪30Aaはキー31によって回り止めされている。
第二の駆動輪20Aaは、軸受21を介して回転駆動軸101に対して回動自在に軸承されている。
第一の駆動輪10Aaには90度間隔で4個のねじ穴12が設けられ、第三の駆動輪30Aaには90度間隔で4個の貫通穴32が設けられ、第二の駆動輪20Aaには図4で示された一対の長窓22が設けられている。
一対の固定ねじ71は、貫通穴32と長窓22を通してねじ穴12に螺入し、第一の駆動輪10Aa、第二の駆動輪20Aaおよび第三の駆動輪30Aaを一体化する。
そして、固定ねじ71、長窓22、ねじ穴12によって連結角度調整機構70Aが構成されている。
リングギア25は、第二の駆動輪20Aaの内部にねじ止め固定されており、このリングギア25に噛合う少数歯車であるピニオンギア35は調整回転軸36の一端に固定されている。
【0013】
調整回転軸36は、第三の駆動輪30Aaの内部の軸受穴37に設けられた軸受によって回動自在に軸承されて、調整回転軸36の他端にはハンドル38が着脱自在に連結されている。
なお、調整回転軸36は第三の駆動輪30Aaの回転に伴って、回転駆動軸101を中心とした公転動作を行うことになるが、ハンドル38の連結位置は例えば調整回転軸36が最下方に公転した位置に限定されていて、ハンドル38が連結されている状態ではサーボモータ110には給電されないように制御されている。
表示ピン23の一端は第二の駆動輪20Aaの端面にねじ止め固定されており、表示ピン23の他端は第三の駆動輪30Aaに設けられた円弧状の長穴である表示窓33を貫通し、表示針24がねじ止め固定されている。
表示窓33の端面には図4で示すとおり目盛34が設けられていて、第一の駆動輪10Aaおよび第三の駆動輪30Aaと第二の駆動輪20Aaとの相対角度関係が表示されている。
なお、図4で示された近点ドグスイッチ124aは、第三の駆動輪30Aaに設けられた調整回転軸36が所定の直下位置に接近公転したことを検出するスイッチとなっている。
【0014】
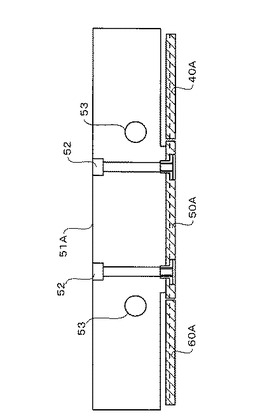
図5は、この発明の実施の形態1に係る搬送装置の第二の仕切り板の平面図である。図6は、この発明の実施の形態1に係る搬送装置の第一の仕切り板の平面図である。
次に、この発明の実施の形態1に係る第二の仕切り板と第一の仕切り板を詳細に説明する。
図5において、第二の仕切り板51Aは、2本の設置ねじ52によって第二の環状長尺体50Aの周面に固定されている。
また、第二の仕切り板51Aの平面部には複数のボールプランジャ53が固定されており、このボールプランジャ53は搭載された可変長移送物品90を第一の仕切り板41Aの方向へ押圧する図示しないスプリングを内蔵すると共に、可変長移送物品90の表面で転動する図示しない滑動球体を包含している。
【0015】
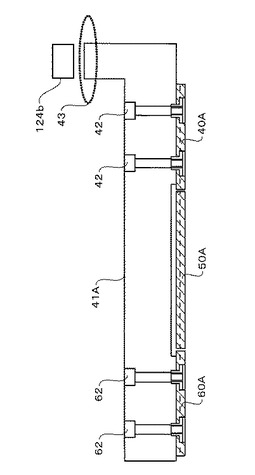
図6において、第一の仕切り板41Aは、2本の設置ねじ42と2本の設置ねじ62とによって第一の環状長尺体40Aと第三の環状長尺体60Aとの周面に固定されている。
第一の仕切り板41Aの端部に設けられた識別部材43は、第二の仕切り板51Aとの違いを明確にするためのはみ出し変形部位であり、仕切到来センサ124bはこの識別部材43の到来に感応するようになっている。
【0016】
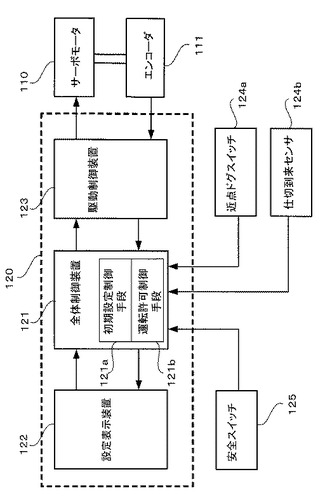
図7は、この発明の実施の形態1に係る搬送装置の制御盤のブロック図である。
次に、この発明の実施の形態1に係る搬送装置の制御盤について詳細に説明する。
図7において、制御盤120は、例えばプログラマブルコントローラである全体制御装置121と、マンマシンインタフェース機器である設定表示装置122と、サーボアンプと位置決制御装置によって構成された駆動制御装置123とによって構成されている。
駆動制御装置123にはサーボモータ110の回転角度を検出するエンコーダ111のパルス信号が入力され、駆動制御装置123はサーボモータ110を間欠駆動制御する間欠駆動制御手段となるものである。
近点ドグスイッチ124aは、調整回転軸36の公転角度が所定位置に接近したことを検出し、全体制御装置121に対して検出信号を入力する。
仕切到来センサ124bは、第一の仕切り板41Aが開始ステーションS1に接近したことを検出し、全体制御装置121に対して検出信号を入力する。
安全スイッチ125は、ハンドル38が調整回転軸36から取外されて、所定の収納治具に収納されたことを検出し、全体制御装置121に対して検出信号を入力する。
なお、全体制御装置121は初期設定制御手段121aと運転許可制御手段121bとなる制御プログラムを包含している。
【0017】
次に、この発明の実施の形態1に係る搬送装置100Aの作用と動作を図7を中心に参照して詳細に説明する。
図7において、図示しない電源スイッチを投入し、設定表示装置122の表示画面に設けられたタッチスイッチによって段取り作業のための初期設定指令を与えるとサーボモータ110の制御動作が開始する。
但し、調整回転軸36が所定の位置に停止しているか、又はハンドル38が収納治具から取り出されていて、安全スイッチ125が作動していないときには、運転許可制御手段121bによってサーボモータ110に対する給電は禁止されるようになっている。
調整回転軸36が所定の位置に停止しておらず、しかもハンドル38が収納治具に収納されていて、安全スイッチ125が作動しているときには、運転許可制御手段121bによってサーボモータ110に対する給電が許可されて回転動作が開始する。
その結果、調整回転軸36が公転して近点ドグスイッチ124aの設置位置を通過するとサーボモータ110は初期設定制御手段121aに基づいて減速開始して、所定角度の回転を行ってから停止する。
その停止位置は例えば調整回転軸36が最下方位置である下死点位置に達した位置であり、サーボモータ110の減速駆動角度は近点ドグスイッチ124aの設置位置と下死点位置までの角度に等しくなるように予め設定されている。
【0018】
調整回転軸36が下死点位置に到来停止すると、連結角度調整機構70Aによる調整操作が行われる。
図3と図4において、固定ねじ71の締め付けを弛め、調整回転軸36にハンドル38を挿入してからハンドル38を左右に回動させると、ピニオンギア35とリングギア25によって第二の駆動輪20Aaが回動し、図1における第一の仕切り板41Aと第二の仕切り板51Aとの間隔が調整される。
この間隔を搭載される可変長移送物品90の前後寸法Lxに略等しく、若干大きい目の寸法に調整してから固定ねじ71を締め付けて、ハンドル38を取外すことによって調整操作が完了する。
なお、ハンドル38による調整操作は図4における長窓22の範囲内で行うことができ、調整角度は表示針24が示す目盛34によって目視することができる。
但し、表示窓33と表示ピン23を廃止して、角度調整を行うときに固定ねじ71を取外してしまえば、第一の駆動輪10Aaおよび第三の駆動輪30Aaと第二の駆動輪20Aaの相対角度は360度を超えて多回転の調整が行なえる。
【0019】
以上の通りの段取り操作が完了し、図7の設定表示装置122の表示画面に設けられたタッチスイッチによって運転開始指令を与えるとサーボモータ110の制御動作が開始する。
サーボモータ110の回転によって第一の仕切り板41Aが仕切到来センサ124bを通過するとサーボモータ110は減速開始して、予め設定されている所定距離の移動によって目標とする開始ステーションS1の位置で停止する。
所定時間が経過したタイムスロットの期間内に可変長移送物品90の搭載完了信号、付加作業完了信号、可変長移送物品90の取出完了信号を受信すると再びサーボモータ110の回転動作が開始する。
このようにして、サーボモータ110は間欠駆動され、第一の仕切り板41Aの設置間隔L0に相当する移動動作を繰返すことになる。
第一の仕切り板41Aと第二の仕切り板51Aとの間に搭載された可変長移送物品90はボールプランジャ53によって押圧され、急加速・急減速に対する揺動が防止されている。
【0020】
なお、上述の説明では、第一の環状長尺体40Aと一体的に動作する第三の環状長尺体60Aを用いたが、可変長移送物品90が小幅・軽量である場合には第三の環状長尺体60Aを省略して、第一の環状長尺体40Aと第二の環状長尺体50Aのみを使用することもできる。
また、上述の説明では第一の仕切り板41Aが第一の環状長尺体40Aから第三の環状長尺体60Aに跨るようにした例を示したが、第三の環状長尺体60Aを使用した場合であって、その第三の環状長尺体60Aに第三の仕切り板を設置して、第一の仕切り板と第三の仕切り板を分離しておいても良い。
また、第一の仕切り板41Aの初期位置調整をしておいてから、サーボモータ110によって第一の仕切り板41Aの設置間隔L0に相当した定寸駆動を行うように移動パルス量を予め設定するようにしておけば、仕切到来センサ124bを省略することも可能である。
【0021】
次に、この発明の実施の形態1に係る搬送装置の構成概要とそれにともなう効果を説明する。
上述の説明で明らかな通り、この発明の実施の形態1に係る搬送装置100Aは、サーボモータ110からプーリである駆動輪を介して循環駆動されるタイミングベルトである環状長尺体を備え、その環状長尺体によって、一定長の可変長移送物品90を前後方向に移送する可変長物品の搬送装置100Aである。
そして、駆動輪と環状長尺体は第一の環状長尺体40Aを駆動する第一の駆動輪10Aaと、第二の環状長尺体50Aを駆動する第二の駆動輪20Aaと、第三の環状長尺体60Aを駆動する第三の駆動輪30Aaとに分割されて並走するようになっている。
第二の駆動輪20Aaは第一の駆動輪10Aaおよび第三の駆動輪30Aaの間に配置されると共に、第二の環状長尺体50Aは第一の環状長尺体40Aと第三の環状長尺体60Aの間に配置されている。
【0022】
可変長移送物品90の前後には第一の環状長尺体40Aおよび第三の環状長尺体60Aに固定された第一の仕切り板41Aと、第二の環状長尺体50Aに固定された第二の仕切り板51Aとが配置されて、第一の仕切り板41Aと第二の仕切り板51Aとで規制される範囲を超えた揺動が制限されている。
第一の仕切り板41Aと第二の仕切り板51Aの間隔は、第一の駆動輪10Aa、第二の駆動輪20Aaおよび第三の駆動輪30Aaをサーボモータ110に連結するときの連結角度調整機構70Aによって可変長移送物品90の前後寸法Lxに応じて調整され、第一の駆動輪10Aa、第二の駆動輪20Aaおよび第三の駆動輪30Aaは共通のサーボモータ110から同一の回転速度で駆動される。
可変長移送物品90は第一の環状長尺体40A、第二の環状長尺体50Aおよび第三の環状長尺体60Aの移動前端部で第一の仕切り板41Aと第二の仕切り板51Aの間に搭載され、第一の環状長尺体40A、第二の環状長尺体50Aおよび第三の環状長尺体60Aの移動後端部で取出しされるようになっている。
【0023】
なお、第三の駆動輪30Aaと第三の環状長尺体60Aを省略しても良い。
上述の通り、この発明の実施の形態1に係る搬送装置100Aでは、第二の環状長尺体50Aを挟んで第一の環状長尺体40Aと第三の環状長尺体60Aが並走し、第一の仕切り板41Aによって前側または後側のストッパを構成するようになっている。
従って、可変長移送物品90の移送方向である前後方向と直交する幅方向の寸法が大きな可変長移送物品90に対して、サーボモータ110を急加速・急減速したときに、仕切り板や環状長尺体に対してねじれ荷重が発生せず、可変長移送物品90の位置を安定することができるという効果を奏する。
【0024】
第一の仕切り板41Aと第二の仕切り板51Aは、第一の環状長尺体40A、第二の環状長尺体50Aおよび第三の環状長尺体60Aの移動方向102に対して一定の設置間隔L0で複数個が固定され、可変長移送物品90は前後寸法Lxが同一である複数のものが継続して順次移送されるようになっている。
上述の通り、この発明の実施の形態1に係る搬送装置100Aでは、第一の環状長尺体40A、第二の環状長尺体50Aおよび第三の環状長尺体60Aには複数個の第一の仕切り板41Aおよび第二の仕切り板51Aが所定の間隔で固定されている。
従って、前後寸法が同一である複数の可変長移送物品90を移送するときに、絶え間なく順次移送することができるので能率が向上するという効果を奏する。
【0025】
第一の環状長尺体40A、第二の環状長尺体50Aおよび第三の環状長尺体60Aには、それらの移動方向102に沿って所定間隔で静止設置された複数の作業ステーションが設けられている。
これら複数の作業ステーションは可変長移送物品90を搭載する開始ステーションS1と、加工処理を行う一箇所または複数箇所の付加ステーションS2と、可変長移送物品90を取出す終了ステーションS3によって構成されている。
サーボモータ110は間欠駆動制御手段を備え、その間欠駆動制御手段は第一の環状長尺体40A、第二の環状長尺体50A、第三の環状長尺体60Aを開始ステーションS1、付加ステーションS2、終了ステーションS3の間隔に相当する所定距離分だけ駆動してから、作業ステーションにおける作業時間に相当した所定時間だけ停止し、引き続いて移動と停止を繰返す。
上述の通り、この発明の実施の形態1に係る搬送装置100Aでは、サーボモータ110は間欠駆動制御手段を備え、可変長移送物品90は複数の作業ステーションの位置で一旦停止するようになっている。
従って、可変長移送物品90の搬入処理、搬出処理および加工処理機構が簡略化されるという効果を奏する。
なお、このように駆動と停止を間欠に高頻度に行うためには、可変長移送物品90を所定位置に安定させておく前後の仕切り板が有効であり、様々な前後寸法のものがある可変長移送物品90に対して、前後の仕切り板の間隔を自由に調整できることが肝要である。
【0026】
間欠駆動制御手段はサーボモータ110の回転量を検出するエンコーダ111を備え、設定された回転量の回転動作を行ってからサーボモータ110を停止し、設定された停止時間の経過に伴って再度回転動作を開始する駆動制御装置123となっている。
上述の通り、この発明の実施の形態1に係る搬送装置では、サーボモータ110は移動量が設定可能な間欠駆動制御手段を備えている。
従って、作業ステーションの間隔が変更されても、間欠駆動距離を手軽に設定変更することができるという効果を奏する。
【0027】
第二の駆動輪20Aaは、第一の駆動輪10Aaと第三の駆動輪30Aaの回転駆動軸101に対して回動可能に軸承され、連結角度調整機構70Aは第二の駆動輪20Aaに設けられた円弧状の長窓22と、その長窓22を介して第一の駆動輪10Aa、第二の駆動輪20Aaおよび第三の駆動輪30Aaを一体化固定する固定ねじ71によって構成されている。
固定ねじ71を緩めた状態で第一の駆動輪10Aaおよび第一の駆動輪10Aaに固定された第三の駆動輪30Aa(以下、第一の駆動輪10Aaと省略する)と第二の駆動輪20Aaとの相対角度関係を調整して、対象とする可変長移送物品90の前後寸法Lxに合わせて仕切り板の前後間隔を調整してから固定ねじ71を締め付け固定するようになっている。
上述の通り、この発明の実施の形態1に係る搬送装置100Aでは、第二の駆動輪20Aaは円弧状の長窓22を介して固定ねじ71によって第一の駆動輪10Aaおよび第三の駆動輪30Aaと一体化する連結角度調整機構を備えている。
従って、簡易な調整機構によって前後の仕切り板の間隔を無段階で調整することができ
るという効果を奏する。
【0028】
第一の駆動輪10Aaまたは第三の駆動輪30Aaの一方は、固定ねじ71が螺合する少なくとも4個のねじ穴12を備えると共に、第二の駆動輪20Aaには複数個の長窓22が設けられている。
固定ねじ71を取外した状態で第一の駆動輪10Aaと第二の駆動輪20Aaとの相対角度関係を調整して、対象とする可変長移送物品90の前後寸法Lxに合わせて仕切り板の前後間隔を調整してから、複数の長窓22から少なくとも2本の固定ねじ71を用いて、ねじ穴12に対して締め付け固定するようになっている。
上述の通り、この発明の実施の形態1に係る搬送装置では、第一の駆動輪10Aaまたは第三の駆動輪30Aaの一方は、固定ねじ71が螺合する少なくとも4個のねじ穴12を備えると共に、第二の駆動輪20Aaには複数個の長窓22が設けられている。
従って、駆動輪の周長よりも仕切り板の間隔を広くしたい場合であっても、第一の駆動輪10Aaと第二の駆動輪20Aaとの相対角度関係を360度以上の多回転で調整することができるという効果を奏する。
【0029】
第二の駆動輪20Aaの端面には歯数の多いリングギア25が固定され、第一の駆動輪10Aaまたは第三の駆動輪30Aaの内部にはリングギア25と噛合う少歯数のピニオンギア35を有する調整回転軸36が回動可能に軸承されて公転し、第一の駆動輪10Aaと第二の駆動輪20Aaとの相対角度関係は、調整回転軸36を回動することによって調整されるようになっている。
上述の通り、この発明の実施の形態1に係る搬送装置では、第一の駆動輪10Aaと第二の駆動輪20Aaとの相対角度の調整は、リングギア25と噛合うピニオンギア35を介して回動調整するようになっている。
従って、回動調整に必要なトルクが小さくて作業性に優れ、微妙な角度調整を手軽に行うことができるという効果を奏する。
【0030】
サーボモータ110は調整回転軸36の公転角度を所定位置で停止させる初期設定制御手段121aを包含する全体制御装置121によって指令制御され、所定の公転角度位置では着脱可能なハンドル38が挿入され、そのハンドル38の回動軸を調整回転軸36に連結してからハンドル38を回動することによって第一の駆動輪10Aaと第二の駆動輪20Aaの相対角度を調整するようになっている。
上述の通り、この発明の実施の形態1に係る搬送装置100Aでは、初期設定制御手段121aによって調整回転軸36の公転角度位置をハンドル38の挿入位置に合わせてから、調整回転軸36を駆動するためのハンドル38が挿入されて角度調整がおこなわれるようになっている。
従って、初期調整作業が簡略化され、備え付けのハンドル38を用いて手軽に角度調整を行うことができるという効果を奏する。
【0031】
全体制御装置121は、運転許可制御手段121bを包含すると共に、ハンドル38は不使用時に所定の位置に取外して格納され、ハンドル38が所定位置に格納されたことを検出する安全スイッチ125を備えている。
運転許可制御手段121bは安全スイッチ125が作動したことによってサーボモータ110に対する給電を許可するようになっている。
上述の通り、この発明の実施の形態1に係る搬送装置100Aでは、調整回転軸36のハンドル38を装着したままではサーボモータ110への給電が行えないようになっている。
従って、誤ってサーボモータ110の駆動が行われて装置を損傷する危険性がなくなるという効果を奏する。
【0032】
第一の駆動輪10Aaまたは第三の駆動輪30Aaには目盛り34を付した円弧状の表示窓33が設けられ、その表示窓33には第二の駆動輪20Aaに埋設固定された表示ピン23が挿入されている。
上述の通り、この発明の実施の形態1に係る搬送装置100Aでは、第一の駆動輪10Aaと第二の駆動輪20Aaの連結相対角度は表示ピン23が挿入される表示窓33の目盛り34によって目視できるようになっている。
従って、目盛り位置と第一の仕切り板41Aと第二の仕切り板51Aの間隔との対応関係をグラフ化しておくことによって、手軽に仕切り板の間隔調整が行なえるという効果を奏する。
【0033】
第二の仕切り板51Aの平面部には複数個のボールプランジャ53が設置され、そのボールプランジャ53は搭載された可変長移送物品90を第一の仕切り板41Aの方向へ押圧するスプリングを内蔵すると共に、可変長移送物品90の表面で転動する滑動球体を包含している。
上述の通り、この発明の実施の形態1に係る搬送装置100Aでは、第二の仕切り板51Aにボールプランジャ53が設置され、搭載された可変長移送物品90を第一の仕切り板41Aの方向へ押圧するようになっている。
従って、第一の仕切り板41Aおよび第二の仕切り板51Aと可変長移送物品90との間に発生する隙間によって物品の揺動が発生せず、可変長移送物品90の搭載が容易になると共に、可変長移送物品90が梱包容器である場合にはその梱包容器に対して精度よく物品を収納することができるという効果を奏する。
【0034】
第一の仕切り板41Aには第二の仕切り板51Aとの違いを識別するための変形部位である識別部材43が設けられていると共に、その識別部材43と対向して仕切到来センサ124bが静止設置されていて、仕切到来センサ124bの動作に応動して可変長移送物品90の搭載が行われるようになっている。
上述の通り、この発明の実施の形態1に係る搬送装置100Aでは、仕切到来センサ124bによって第一の仕切り板41Aの到来を検出してから可変長移送物品90の搭載が行われるようになっている。
従って、連結角度調整機構によって位置が変動しない第一の仕切り板41Aの位置を基準にして精度よく可変長移送物品90の搭載が行われるという効果を奏する。
【0035】
実施の形態2.
(1)構成の詳細な説明
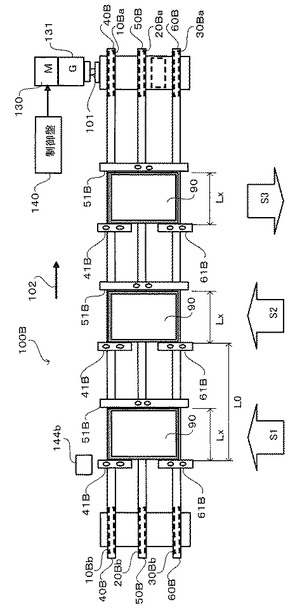
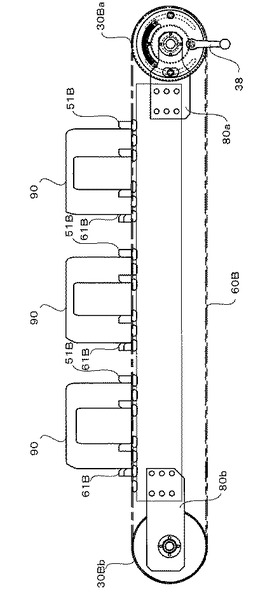
次に、この発明の第二実施形態である搬送装置100Bの上面図である図8と、図8のものの側面図である図9について、図1・図2のものとの相違点を中心にして説明する。なお、各図において同一符号は同一又は相当部分を示している。
図8・図9において、第一の駆動輪10Baと第一の従動輪10Bbはチェーンである第一の環状長尺体40Bが張架されるスプロケットホイールであり、第二の駆動輪20Baと第二の従動輪20Bbはチェーンである第二の環状長尺体50Bが張架されるスプロケットホイールであり、第三の駆動輪30Baと第三の従動輪30Bbはチェーンである第三の環状長尺体60Bが張架されるスプロケットホイールである。
そして、第一の駆動輪10Ba、第二の駆動輪20Baおよび第三の駆動輪30Baは、減速機を内蔵したインダクションモータ130から間欠駆動機構131と回転駆動軸101を介して一体駆動されて、各長尺体は移動方向102の方向に並行移動する。
このインダクションモータ130は図14で後述する制御盤140によって駆動制御される。
また、回転駆動軸101は図9で示す静止体80aによって軸承されていると共に、図示しない従動軸は図9で示す静止体80bに固定され、第一の従動輪10Bb、第二の従動輪20Bbおよび第三の従動輪30Bbは従動軸に対して互いに自由に転動する。
第二の環状長尺体50Bは第一の環状長尺体40Bと第三の環状長尺体60Bの間に位置し、第二の駆動輪20Baと回転駆動軸101との連結角度は図10、図11で後述する連結角度調整機構70Bによって調整される。
【0036】
第一の仕切り板41Bと第三の仕切り板61Bは、図12で後述するとおり、第一の環状長尺体40Bと第三の環状長尺体60Bに設置されたプロファイルであり、このプロファイルは第一の環状長尺体40Bと第三の環状長尺体60Bの周面に所定の設置間隔L0をおいて均等に設置されている。
第二の仕切り板51Bは、図13で後述するとおり、第二の環状長尺体50Bに設置されたプロファイルであり、このプロファイルも第二の環状長尺体50Bの周面に所定の設置間隔L0をおいて均等に設置されているが、第一の仕切り板41Bおよび第三の仕切り板61Bとの間には可変長移送物品90の前後寸法Lxに相当した間隔が設けられている。
開始ステーションS1は、可変長移送物品90が側面または上方から各長尺体上に搭載される作業開始ステーションであり、仕切到来センサ144bは第一の仕切り板41Bが作業開始ステーションS1に到来したことを検出する。
付加ステーションS2は、例えば可変長移送物品90が梱包容器であって、この梱包容器に対して収納物品を投入する作業ステーションとなっている。
終了ステーションS3は可変長移送物品90を側面または上方へ取り出す作業ステーションである。なお、開始ステーションS1と終了ステーションS3との間には複数の付加ステーションS2が設けられても良い。
【0037】
図10は、この発明の実施の形態2に係る搬送装置の連結角度調整機構の断面図である。図11は、この発明の実施の形態2に係る搬送装置の連結角度調整機構の側面図である。
次に、この発明の実施の形態2に係る搬送装置の連結角度調整機構について説明する。
図10、図11において、静止体80aによって軸承されている回転駆動軸101にはキー11、31が設けられていて、第一の駆動輪10Baはキー11によって回り止めされ、第三の駆動輪30Baはキー31によって回り止めされている。
第二の駆動輪20Baは、軸受21を介して回転駆動軸101に対して回動自在に軸承されている。
第一の駆動輪10Baには180度間隔で2個のねじ穴12が設けられ、第三の駆動輪30Baには180度間隔で2個の貫通穴32が設けられ、第二の駆動輪20Baには図11に示された一対の長窓22が設けられている。
一対の固定ねじ71は貫通穴32と長窓22を通してねじ穴12に螺入し、第一の駆動輪10Ba、第二の駆動輪20Baおよび第三の駆動輪30Baを一体化するようになっていて、固定ねじ71、長窓22およびねじ穴12によって連結角度調整機構70Bが構成されている。
リングギア25は第二の駆動輪20Baの内部にねじ止め固定されており、このリングギア25に噛合う少数歯車であるピニオンギア35は調整回転軸36の一端に固定されている。
【0038】
調整回転軸36は第三の駆動輪30Baの内部の軸受穴37に設けられた軸受によって回動自在に軸承されて、調整回転軸36の他端にはハンドル38が着脱自在に連結されるようになっている。
なお、調整回転軸36は第三の駆動輪30Baの回転に伴って、回転駆動軸101を中心とした公転動作を行うことになるが、ハンドル38の連結位置は例えば調整回転軸36が最下方に公転した位置に限定されていて、ハンドル38が連結されている状態ではインダクションモータ130には給電されないように制御されている。
表示ピン23の一端は第二の駆動輪20Baの端面にねじ止め固定されており、表示ピン23の他端は第三の駆動輪30Baに設けられた円弧状の長穴である表示窓33を貫通し、表示針24がねじ止め固定されている。
表示窓33の端面には図11で示すとおり目盛34が設けられていて、第一の駆動輪10Baおよび第三の駆動輪30Baと第二の駆動輪20Baとの相対角度関係が表示されている。
なお、図11で示された近点ドグスイッチ144aは、第三の駆動輪30Baに設けられた調整回転軸36が所定の直下位置に公転接近したことを検出するスイッチである。
【0039】
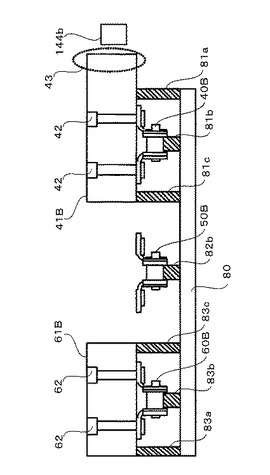
図12は、この発明の実施の形態2に係る搬送装置の第一の仕切り板と第三の仕切り板の正面図である。
次に、この発明の実施の形態2に係る搬送装置の第一の仕切り板および第三の仕切り板を詳細に説明する。
図12において、第一の仕切り板41Bと第三の仕切り板61Bは、それぞれ2本の設置ねじ42と2本の設置ねじ62とによって第一の環状長尺体40Bと第三の環状長尺体60Bとの周面に固定されている。
第一の仕切り板41Bの端部に設けられた識別部材43は、第二の仕切り板51Bとの違いを明確にするためのはみ出し変形部位であり、仕切到来センサ144bはこの識別部材43の到来に感応するようになっている。
第一の環状長尺体40B、第二の環状長尺体50Bおよび第三の環状長尺体60Bの下部に静止設置されたレール台80には、各環状長尺体が垂れ下がるのを防止するための第一のレール81b、第二のレール82b、第三のレール83bが敷設されている。
また、第一のレール81bと第三のレール83bの両側には、補助レール81a、81c、83a、83cが敷設されており、この補助レール81a、81c、83a、83cは第一のレール81b、第二のレール82b、第三のレール83bの高さと同等、または各環状長尺体の厚さ寸法未満の寸法分だけ高くなっている。
【0040】
図13は、この発明の実施の形態2に係る搬送装置の第二の仕切り板の平面図である。 次に、この発明の実施の形態2に係る搬送装置の第二の仕切り板を詳細に説明する。
図13において、第二の仕切り板51Bは2本の設置ねじ52によって第二の環状長尺体50Bの周面に固定されている。
また、第二の仕切り板51Bの平面部には複数のボールプランジャ53が固定されており、このボールプランジャ53は搭載された可変長移送物品90を第一の仕切り板41Bおよび第三の仕切り板61Bの方向へ押圧する図示しないスプリングを内蔵すると共に、可変長移送物品90の表面で転動する図示しない滑動球体を包含している。
【0041】
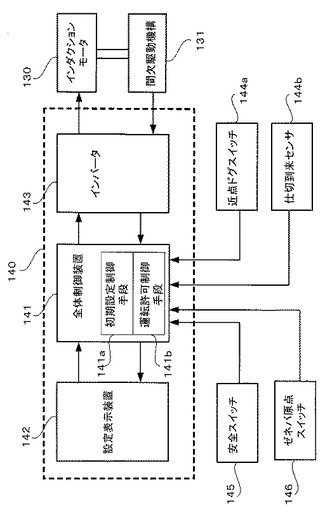
図14は、この発明の実施の形態2に係る搬送装置の制御盤の構成図である。
次に、この発明の実施の形態2に係る搬送装置の制御盤について説明する。
図14において、制御盤140は、例えばプログラマブルコントローラである全体制御装置141と、マンマシンインタフェース機器である設定表示装置142と、可変周波数の交流出力電圧を発生するインバータ143とによって構成されている。
近点ドグスイッチ144aは、調整回転軸36の公転角度が所定位置に接近したことを検出し、全体制御装置141に対して検出信号を入力する。
仕切到来センサ144bは第一の仕切り板41Bが開始ステーションS1に接近したことを検出し、全体制御装置141に対して検出信号を入力する。
安全スイッチ145は、ハンドル38が調整回転軸36から取外されて、所定の収納治具に収納されたことを検出し、全体制御装置141に対して検出信号を入力する。
ゼネバ原点スイッチ146は、インダクションモータ130から駆動される間欠駆動機構131に設けられ、間欠駆動機構131が駆動停止している原点を検出し、全体制御装置141に対して検出信号を入力する。
なお、全体制御装置141は、初期設定制御手段141aと運転許可制御手段141bとなる制御プログラムを包含している。
【0042】
次に、この発明の実施の形態2に係る搬送装置100Bの作用と動作とを詳細に説明する。
図14において、図示しない電源スイッチを投入し、設定表示装置142の表示画面に設けられたタッチスイッチによって段取り作業のための初期設定指令を与えるとインダクションモータ130の制御動作が開始する。
但し、調整回転軸36が所定の位置に停止しているか、又はハンドル38が収納治具から取り出されていて、安全スイッチ145が作動していないときには、運転許可制御手段141bによってインダクションモータ130に対する給電は禁止されるようになっている。
調整回転軸36が所定の位置に停止しておらず、しかもハンドル38が収納治具に収納されていて、安全スイッチ145が作動しているときには、運転許可制御手段141bによってインダクションモータ130に対する給電が許可されて回転動作が開始する。
その結果、調整回転軸36が公転して近点ドグスイッチ144aの設置位置を通過するとインダクションモータ130は初期設定制御手段141aに基づいて減速開始して、ゼネバ原点スイッチ146が動作したことによって停止する。
なお、間欠駆動機構131にはゼネバ機構が使用されているので、インダクションモータ130を連続回転させておいても、間欠歯車の非駆動期間において回転駆動軸101は一時的に停止し、モータ軸が所定角度回転することによって再び回転駆動軸101が回転動作を再開するようになっている。
ゼネバ原点スイッチ146は間欠歯車が非駆動期間となったことを検出して、この時点でインダクションモータ130自体を停止するようになっている。
その停止位置は例えば調整回転軸36が最下方位置である下死点位置に達した位置となるように近点ドグスイッチ144aの動作位置が調整されている。
【0043】
調整回転軸36が下死点位置に到来停止すると、連結角度調整機構70Bによる調整操作が行われる。
図10と図11において、固定ねじ71の締め付けを弛め、ハンドル38を調整回転軸36に挿入してから左右に回動させると、ピニオンギア35とリングギア25によって第二の駆動輪20Baが回動し、第一の仕切り板41Bおよび第三の仕切り板61Bと第二の仕切り板51Bとの間隔が調整される。
この間隔を搭載される可変長移送物品90の前後寸法Lxに略等しく、若干大きい目の寸法に調整してから固定ねじ71を締め付けて、ハンドル38を取外すことによって調整操作が完了する。
なお、ハンドル38による調整操作は図11における長窓22の範囲内で行うことができ、調整角度は表示針24が示す目盛34によって目視することができる。
【0044】
以上のとおりの段取り操作が完了し、図14の設定表示装置142の表示画面に設けられたタッチスイッチによって運転開始指令を与えるとインダクションモータ130の制御動作が開始する。
インダクションモータ130は起動開始してからゼネバ原点スイッチ146が再度動作した時点で駆動停止され、この間で各仕切り板は設定距離L0だけ前進動作する。
インダクションモータ130の回転によって第一の仕切り板41Bが仕切到来センサ144bを通過して、インダクションモータ130が停止すると、開始ステーションS1、付加ステーションS2、終了ステーションS3において可変長移送物品90の搭載、付加作業、取り出しが行われる。
所定時間が経過したタイムスロットの期間内に可変長移送物品90の搭載完了信号、付加作業完了信号、可変長移送物品90の取出完了信号を受信すると再びインダクションモータ130の回転動作が開始する。
このようにして、インダクションモータ130は間欠駆動されるが、可変長移送物品90の移動量は間欠駆動機構131の歯車構成によって決定される。
第一の仕切り板41Bおよび第三の仕切り板61Bと第二の仕切り板51Bとの間に搭載された可変長移送物品90はボールプランジャ53によって押圧され、急加速・急減速に対する揺動が防止されている。
【0045】
なお、上述の説明では、第一の環状長尺体40Bと一体として動作する第三の環状長尺体60Bを用いているが、可変長移送物品90が小幅・軽量である場合には第三の環状長尺体60Bを省略して、第一の環状長尺体40Bと第二の環状長尺体50Bのみを使用しても良い。
また、第三の環状長尺体60Bを使用した場合であっても、第三の環状長尺体60Bに設置された第三の仕切り板61Bを第一の仕切り板41Bと一体のものとしても良い。
【0046】
次に、この発明の実施の形態2に係る搬送装置の構成概要に効果を関連付けて説明する。
この発明の実施の形態2に係る搬送装置100Bは、インダクションモータ130からスプロケットホイールである駆動輪を介して循環駆動されるチェーンである環状長尺体を備え、その環状長尺体によって一定長の可変長移送物品90を前後方向に移送する。
また、搬送装置100Bでの環状長尺体は、第一の駆動輪10Baにより駆動される第一の環状長尺体40Bと、第二の駆動輪20Baにより駆動される第二の環状長尺体50Bと、第三の駆動輪30Baにより駆動される第三の環状長尺体60Bに分割されているとともに並走する。
また、搬送装置100Bでは、可変長移送物品90が搬送される方向に対して可変長移送物品90の後には第一の環状長尺体40Bに固定された第一の仕切り板41Bおよび第三の環状長尺体60Bに固定された第三の仕切り板61Bと可変長移送物品90の前には第二の環状長尺体50Bに固定された第二の仕切り板51Bとが配置されており、可変長移送物品90の揺動が第一の仕切り板41Bおよび第三の仕切り板61Bと第二の仕切り板51Bの間で制限されている。
第一の仕切り板41Bと第三の仕切り板61Bは可変長移送物品90が搬送される方向に対しては揃って移動されるので、第一の仕切り板41Bと第三の仕切り板61Bの位置を第一の仕切り板41Bの位置で代表することができる。
そして、第一の仕切り板41Bと第二の仕切り板51Bの間隔は、第一の駆動輪10Baと第二の駆動輪20Baをインダクションモータ130に連結するときの連結角度調整機構70Bによって可変長移送物品90の前後寸法Lxに応じて調整され、第一の駆動輪10Baと第二の駆動輪20Baは共通のインダクションモータ130から同一の回転速度で駆動される。当然第三の駆動輪30Baは第一の駆動輪10Baと同一の回転速度で駆動されている。
可変長移送物品90は第一の環状長尺体40Bおよび第二の環状長尺体50Bの移動前端部で第一の仕切り板41Bと第二の仕切り板51Bとの間に搭載され、第一の環状長尺体40Bおよび第二の環状長尺体50Bの移動後端部で取出しされるようになっている。
【0047】
なお、可変長移送物品90の幅や重量によっては環状長尺体を第一の環状長尺体40Bと第二の環状長尺体50Bだけにしても良い。このときには、駆動輪は第一の駆動輪10Baと第二の駆動輪20Baだけにし、第三の仕切り板61Bを省略しても良い。
【0048】
第一の仕切り板41B、第二の仕切り板51Bおよび第三の仕切り板61Bは、第一の環状長尺体40B、第二の環状長尺体50Bおよび第三の環状長尺体60Bの移動方向102に対して一定の設置間隔L0で複数個が固定され、前後寸法Lxが同一である複数の可変長移送物品90が継続して順次移送されるようになっている。
【0049】
第一の環状長尺体40B、第二の環状長尺体50B、第三の環状長尺体60Bには、環状長尺体の移動方向に沿って所定間隔で静止設置された複数の作業ステーションが設けられ、作業ステーションは可変長移送物品90を搭載する開始ステーションS1と、加工処理を行う1つまたは複数の付加ステーションS2と、可変長移送物品90を取出す終了ステーションS3によって構成され、インダクションモータ130は間欠駆動制御手段を備え、間欠駆動制御手段は第一の環状長尺体40B、第二の環状長尺体50B、第三の環状長尺体60Bを開始ステーションS1、付加ステーションS2、終了ステーションS3の間隔に相当する所定距離分だけ駆動してから、作業ステーションにおける作業時間に相当した所定時間だけ停止し、引き続いて移動と停止を繰返す。
【0050】
間欠駆動制御手段はインダクションモータ130と第一の駆動輪10Ba、第二の駆動輪20Ba、第三の駆動輪30Baとの間に設けられた間欠駆動機構131となっている。
上述の通り、この発明の実施の形態2に係る搬送装置100Bでは、インダクションモータ130は間欠駆動機構131を備えている。従って、インダクションモータ130は簡易な可変速モータを使用して精度良く所定位置に停止することができると共に、駆動停止期間にあっては必要に応じてモータを停止させておくことによって停止時間の調整が可能となる効果を奏する。
【図面の簡単な説明】
【0051】
【図1】この発明の実施の形態1に係る搬送装置の上面図である。
【図2】この発明の実施の形態1に係る搬送装置の側面図である。
【図3】この発明の実施の形態1に係る搬送装置の連結角度調整機構の断面図である。
【図4】この発明の実施の形態1に係る搬送装置の連結角度調整機構の側面図である。
【図5】この発明の実施の形態1に係る搬送装置の第二の仕切り板の平面図である。
【図6】この発明の実施の形態1に係る搬送装置の第一の仕切り板の平面図である。
【図7】この発明の実施の形態1に係る搬送装置の制御盤のブロック図である。
【図8】この発明の実施の形態2に係る搬送装置の上面図である。
【図9】この発明の実施の形態2に係る搬送装置の側面図である。
【図10】この発明の実施の形態2に係る搬送装置の連結角度調整機構の断面図である。
【図11】この発明の実施の形態2に係る搬送装置の連結角度調整機構の側面図である。
【図12】この発明の実施の形態2に係る搬送装置の第一の仕切り板および第三の仕切り板の正面図である。
【図13】この発明の実施の形態2に係る搬送装置の第二の仕切り板の平面図である。
【図14】この発明の実施の形態2に係る搬送装置の制御盤の構成図である。
【符号の説明】
【0052】
10Aa、10Ba 第一の駆動輪、10Ab、10Bb 第一の従動輪、11 キー、12 穴、20Aa、20Ba 第二の駆動輪、20Ab、20Bb 第二の従動輪、21 軸受、22 長窓、23 表示ピン、24 表示針、25 リングギア、30Aa、30Ba 第三の駆動輪、30Ab、30Bb 第三の従動輪、31 キー、32 貫通穴、33 表示窓、34 目盛、35 ピニオンギア、36 調整回転軸、37 軸受穴、38 ハンドル、40A、40B 第一の環状長尺体、41A、41B 第一の仕切り板、43 識別部材、50A、50B 第二の環状長尺体、51A、51B 第二の仕切り板、53 ボールプランジャ、60A、60B 第三の環状長尺体、61B 第三の仕切り板、70A、70B 連結角度調整機構、80 レール台、80a、80b 静止体、81b、82b、83b レール、81a、81c、83a、83c 補助レール、90 可変長移送物品、100A、100B 搬送装置、101 回転駆動軸、102 移動方向、110 サーボモータ、111 エンコーダ、120 制御盤、121a 初期設定制御手段、121b 運転許可制御手段、121 全体制御装置、122 設定表示装置、123 駆動制御装置、124a 近点ドグスイッチ 124b 仕切到来センサ、125 安全スイッチ、130 インダクションモータ、131 間欠駆動機構、140 制御盤、141 全体制御装置、141a 初期設定制御手段、141b 運転許可制御手段、142 設定表示装置、143 インバータ、144a 近点ドグスイッチ、144b 仕切到来センサ、145 安全スイッチ、146 ゼネバ原点スイッチ、
S1 開始ステーション、S2 付加ステーション、S3 終了ステーション。
【技術分野】
【0001】
この発明は、例えば小物物品が投入される梱包用のカートンボックスを順次作業ステーションへ移送するコンベア等の搬送装置の改良、特にコンベアの急加速や急減速に対する移送物品の揺動を抑制するようにした可変長物品の搬送装置に関するものである。
【背景技術】
【0002】
移送物品の高速搬送を行うためには、コンベア上で移送物品が移動したり、揺動したりすることを防止することが重要である。例えば、包装機械を通って移行経路に沿い複数の容器を搬送する為のラグ付きコンベヤチェーンのピッチを選択的に変える方法であって、該コンベヤチェーンは包装機械上に支持されており且つその上で容器を運ぶ為のコンベヤチェーンの少なくとも一部に沿って概略水平な輸送面を有し、この方法は、コンベヤチェーンを移行経路に沿って移動する、そのコンベヤチェーンはその長さに沿って離間した一連のラグを有している(例えば、特許文献1参照)。
【0003】
また、そのラグのそれぞれをコンベヤチェーンの輸送面に沿って輸送面に対し平行な下降位置に案内する。また、そのラグの少なくとも一つをそのコンベヤチェーンの長さの少なくとも一部に沿って輸送面上に延ばされた上昇位置へと選択的に押しやる工程よりなり、それによって、そのラグのピッチを、コンベヤチェーン輸送面の長さに沿って変えるため、そのラグのそれぞれを下降位置から上昇位置へと個別に押しやれることができる。
要は、コンベアチェーンに設けられた多数の仕切り板(ラグ)を選択的に有効にして、搬送物品の前後を仕切り板で分離する方法であって、多数の仕切り板を所定間隔で選択すれば仕切り間隔が狭くなり、飛び飛びで仕切り板を選択すれば仕切り間隔が広くなるようになっている。
【0004】
【特許文献1】特表平11−500984号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
特許文献1による包装機械によれば、機械の運転中において仕切り板(ラグ)の間隔を変更設定することができる特徴があるが、仕切り板の間隔を例えば数mm単位で微調整することが困難であり、その間隔は仕切り板の設置間隔以下にはならない問題点がある。
従って、カートンボックスの前後に仕切り板を置いて搬送しようとした場合に、カートンボックスの前後に隙間が発生し、搬送中の移動・揺動が発生する問題点がある。
【0006】
この発明の第一の目的は可変一定長の移送物品を高速搬送するのに適した仕切り板の間隔調整手段を備えた可変長物品の搬送装置を提供することである。
この発明の第二の目的は手軽な段取り替え作業によって、移送物品の前後寸法の変化に対応することができる仕切り板の間隔調整手段を備えた可変長物品の搬送装置を提供することである。
【課題を解決するための手段】
【0007】
この発明に係る搬送装置は、モータにより駆動輪を介して循環駆動される環状長尺体を備え、上記環状長尺体上に搭載された一定長の可変長移送物品を前後方向に移送する搬送装置であって、上記駆動輪は上記モータに連結された回転駆動軸に固定される第一の駆動輪および上記第一の駆動輪と連結角度調整機構を介して連結される第二の駆動輪を備え、上記環状長尺体は上記第一の駆動輪により駆動される第一の環状長尺体および上記第2の駆動輪により駆動される第二の環状長尺体を備え、上記可変長移送物品の移送方向の後側に配置されるとともに上記第一の環状長尺体に固定される第一の仕切り板および上記可変長移送物品の移送方向の前側に配置されるとともに上記第二の環状長尺体に固定される第二の仕切り板を備え、上記第一の仕切り板と上記第二の仕切り板の間隔は、上記第二の駆動輪を上記第一の駆動輪に連結するときに上記連結角度調整機構によって上記可変長移送物品の前後寸法に対応するよう調整され、上記可変長移送物品は上記環状長尺体の移動前端部で上記第一の仕切り板と上記第二の仕切り板の間に搭載され、上記環状長尺体の移動後端部で取り出される。
【発明の効果】
【0008】
この発明に係る搬送装置は、可変長移送物品の前に第二の仕切り板且つ後に第一の仕切り板が配置され、第一の仕切り板と第二の仕切り板の間隔は可変長移送物品の前後寸法に応じて連結角度調整機構によって自由に調整されるので、モータを急加速・急減速したときにも、可変長移送物品の位置を安定することができるので、高速・高能率の運転を行うことができるという効果を奏する。
【発明を実施するための最良の形態】
【0009】
実施の形態1.
図1は、この発明の実施の形態1に係る搬送装置100Aの上面図である。図2は、この発明の実施の形態1に係る搬送装置100Aの側面図である。
この発明の実施の形態1に係る搬送装置100Aの構成を詳細に説明する。
図1と図2において、第一の駆動輪10Aaと第一の従動輪10Abはタイミングベルトである第一の環状長尺体40Aが張架されるプーリであり、第二の駆動輪20Aaと第二の従動輪20Abはタイミングベルトである第二の環状長尺体50Aが張架されるプーリであり、第三の駆動輪30Aaと第三の従動輪30Abはタイミングベルトである第三の環状長尺体60Aが張架されるプーリである。
第一の駆動輪10Aa、第二の駆動輪20Aaおよび第三の駆動輪30Aaは、減速機を内蔵したサーボモータ110から回転駆動軸101を介して一体駆動されて、各長尺体は移動方向102の方向に並行移動される。
このサーボモータ110は、モータの回転角度を検出するエンコーダ111を備え、図7で後述する制御盤120によって駆動制御される。
また、回転駆動軸101は図2で示す静止体80aによって軸承されていると共に、図示しない従動軸は図2で示す静止体80bに固定されて、第一の従動輪10Ab、第二の従動輪20Abおよび第三の従動輪30Abはこの従動軸に対して互いに自由に転動することができる。
第二の環状長尺体50Aは、第一の環状長尺体40Aと第三の環状長尺体60Aの間に位置し、第二の駆動輪20Aaと回転駆動軸101との連結角度は図3と図4で後述する連結角度調整機構70Aによって調整される。
【0010】
第一の仕切り板41Aは図6で後述するとおり、第一の環状長尺体40Aと第三の環状長尺体60A間に跨って設置されたプロファイルであり、このプロファイルは第一の環状長尺体40Aと第三の環状長尺体60Aの周面に所定の設置間隔L0をおいて均等に設置されている。
第二の仕切り板51Aは図5で後述するとおり、第二の環状長尺体50Aに設置されたプロファイルであり、このプロファイルも第二の環状長尺体50Aの周面に所定の設置間隔L0をおいて均等に設置されているが、第一の仕切り板41Aとの間には可変長移送物品90の前後寸法Lxに相当した間隔が設けられている。
【0011】
開始ステーションS1は、可変長移送物品90が側面または上方から各長尺体上に搭載される作業ステーションであり、仕切到来センサ124bは第一の仕切り板41Aが開始ステーションS1に到来したことを検出する。
付加ステーションS2は、例えば可変長移送物品90が梱包容器であって、この梱包容器に対して収納物品を投入する作業ステーションとなっている。
終了ステーションS3は、可変長移送物品90を側面または上方へ取り出す作業ステーションである。
なお、開始ステーションS1と終了ステーションS3との間に複数の付加ステーションS2を設けても良い。
【0012】
図3は、この発明の実施の形態1に係る搬送装置の連結角度調整機構の断面図である。図4は、この発明の実施の形態1に係る搬送装置の連結角度調整機構の側面図である。
次に、この発明の実施の形態1に係る搬送装置の連結角度調整機構を図3と図4とを参照して説明する。
図3と図4において、静止体80aによって軸承されている回転駆動軸101にはキー11、31が設けられていて、第一の駆動輪10Aaはキー11によって回り止めされ、第三の駆動輪30Aaはキー31によって回り止めされている。
第二の駆動輪20Aaは、軸受21を介して回転駆動軸101に対して回動自在に軸承されている。
第一の駆動輪10Aaには90度間隔で4個のねじ穴12が設けられ、第三の駆動輪30Aaには90度間隔で4個の貫通穴32が設けられ、第二の駆動輪20Aaには図4で示された一対の長窓22が設けられている。
一対の固定ねじ71は、貫通穴32と長窓22を通してねじ穴12に螺入し、第一の駆動輪10Aa、第二の駆動輪20Aaおよび第三の駆動輪30Aaを一体化する。
そして、固定ねじ71、長窓22、ねじ穴12によって連結角度調整機構70Aが構成されている。
リングギア25は、第二の駆動輪20Aaの内部にねじ止め固定されており、このリングギア25に噛合う少数歯車であるピニオンギア35は調整回転軸36の一端に固定されている。
【0013】
調整回転軸36は、第三の駆動輪30Aaの内部の軸受穴37に設けられた軸受によって回動自在に軸承されて、調整回転軸36の他端にはハンドル38が着脱自在に連結されている。
なお、調整回転軸36は第三の駆動輪30Aaの回転に伴って、回転駆動軸101を中心とした公転動作を行うことになるが、ハンドル38の連結位置は例えば調整回転軸36が最下方に公転した位置に限定されていて、ハンドル38が連結されている状態ではサーボモータ110には給電されないように制御されている。
表示ピン23の一端は第二の駆動輪20Aaの端面にねじ止め固定されており、表示ピン23の他端は第三の駆動輪30Aaに設けられた円弧状の長穴である表示窓33を貫通し、表示針24がねじ止め固定されている。
表示窓33の端面には図4で示すとおり目盛34が設けられていて、第一の駆動輪10Aaおよび第三の駆動輪30Aaと第二の駆動輪20Aaとの相対角度関係が表示されている。
なお、図4で示された近点ドグスイッチ124aは、第三の駆動輪30Aaに設けられた調整回転軸36が所定の直下位置に接近公転したことを検出するスイッチとなっている。
【0014】
図5は、この発明の実施の形態1に係る搬送装置の第二の仕切り板の平面図である。図6は、この発明の実施の形態1に係る搬送装置の第一の仕切り板の平面図である。
次に、この発明の実施の形態1に係る第二の仕切り板と第一の仕切り板を詳細に説明する。
図5において、第二の仕切り板51Aは、2本の設置ねじ52によって第二の環状長尺体50Aの周面に固定されている。
また、第二の仕切り板51Aの平面部には複数のボールプランジャ53が固定されており、このボールプランジャ53は搭載された可変長移送物品90を第一の仕切り板41Aの方向へ押圧する図示しないスプリングを内蔵すると共に、可変長移送物品90の表面で転動する図示しない滑動球体を包含している。
【0015】
図6において、第一の仕切り板41Aは、2本の設置ねじ42と2本の設置ねじ62とによって第一の環状長尺体40Aと第三の環状長尺体60Aとの周面に固定されている。
第一の仕切り板41Aの端部に設けられた識別部材43は、第二の仕切り板51Aとの違いを明確にするためのはみ出し変形部位であり、仕切到来センサ124bはこの識別部材43の到来に感応するようになっている。
【0016】
図7は、この発明の実施の形態1に係る搬送装置の制御盤のブロック図である。
次に、この発明の実施の形態1に係る搬送装置の制御盤について詳細に説明する。
図7において、制御盤120は、例えばプログラマブルコントローラである全体制御装置121と、マンマシンインタフェース機器である設定表示装置122と、サーボアンプと位置決制御装置によって構成された駆動制御装置123とによって構成されている。
駆動制御装置123にはサーボモータ110の回転角度を検出するエンコーダ111のパルス信号が入力され、駆動制御装置123はサーボモータ110を間欠駆動制御する間欠駆動制御手段となるものである。
近点ドグスイッチ124aは、調整回転軸36の公転角度が所定位置に接近したことを検出し、全体制御装置121に対して検出信号を入力する。
仕切到来センサ124bは、第一の仕切り板41Aが開始ステーションS1に接近したことを検出し、全体制御装置121に対して検出信号を入力する。
安全スイッチ125は、ハンドル38が調整回転軸36から取外されて、所定の収納治具に収納されたことを検出し、全体制御装置121に対して検出信号を入力する。
なお、全体制御装置121は初期設定制御手段121aと運転許可制御手段121bとなる制御プログラムを包含している。
【0017】
次に、この発明の実施の形態1に係る搬送装置100Aの作用と動作を図7を中心に参照して詳細に説明する。
図7において、図示しない電源スイッチを投入し、設定表示装置122の表示画面に設けられたタッチスイッチによって段取り作業のための初期設定指令を与えるとサーボモータ110の制御動作が開始する。
但し、調整回転軸36が所定の位置に停止しているか、又はハンドル38が収納治具から取り出されていて、安全スイッチ125が作動していないときには、運転許可制御手段121bによってサーボモータ110に対する給電は禁止されるようになっている。
調整回転軸36が所定の位置に停止しておらず、しかもハンドル38が収納治具に収納されていて、安全スイッチ125が作動しているときには、運転許可制御手段121bによってサーボモータ110に対する給電が許可されて回転動作が開始する。
その結果、調整回転軸36が公転して近点ドグスイッチ124aの設置位置を通過するとサーボモータ110は初期設定制御手段121aに基づいて減速開始して、所定角度の回転を行ってから停止する。
その停止位置は例えば調整回転軸36が最下方位置である下死点位置に達した位置であり、サーボモータ110の減速駆動角度は近点ドグスイッチ124aの設置位置と下死点位置までの角度に等しくなるように予め設定されている。
【0018】
調整回転軸36が下死点位置に到来停止すると、連結角度調整機構70Aによる調整操作が行われる。
図3と図4において、固定ねじ71の締め付けを弛め、調整回転軸36にハンドル38を挿入してからハンドル38を左右に回動させると、ピニオンギア35とリングギア25によって第二の駆動輪20Aaが回動し、図1における第一の仕切り板41Aと第二の仕切り板51Aとの間隔が調整される。
この間隔を搭載される可変長移送物品90の前後寸法Lxに略等しく、若干大きい目の寸法に調整してから固定ねじ71を締め付けて、ハンドル38を取外すことによって調整操作が完了する。
なお、ハンドル38による調整操作は図4における長窓22の範囲内で行うことができ、調整角度は表示針24が示す目盛34によって目視することができる。
但し、表示窓33と表示ピン23を廃止して、角度調整を行うときに固定ねじ71を取外してしまえば、第一の駆動輪10Aaおよび第三の駆動輪30Aaと第二の駆動輪20Aaの相対角度は360度を超えて多回転の調整が行なえる。
【0019】
以上の通りの段取り操作が完了し、図7の設定表示装置122の表示画面に設けられたタッチスイッチによって運転開始指令を与えるとサーボモータ110の制御動作が開始する。
サーボモータ110の回転によって第一の仕切り板41Aが仕切到来センサ124bを通過するとサーボモータ110は減速開始して、予め設定されている所定距離の移動によって目標とする開始ステーションS1の位置で停止する。
所定時間が経過したタイムスロットの期間内に可変長移送物品90の搭載完了信号、付加作業完了信号、可変長移送物品90の取出完了信号を受信すると再びサーボモータ110の回転動作が開始する。
このようにして、サーボモータ110は間欠駆動され、第一の仕切り板41Aの設置間隔L0に相当する移動動作を繰返すことになる。
第一の仕切り板41Aと第二の仕切り板51Aとの間に搭載された可変長移送物品90はボールプランジャ53によって押圧され、急加速・急減速に対する揺動が防止されている。
【0020】
なお、上述の説明では、第一の環状長尺体40Aと一体的に動作する第三の環状長尺体60Aを用いたが、可変長移送物品90が小幅・軽量である場合には第三の環状長尺体60Aを省略して、第一の環状長尺体40Aと第二の環状長尺体50Aのみを使用することもできる。
また、上述の説明では第一の仕切り板41Aが第一の環状長尺体40Aから第三の環状長尺体60Aに跨るようにした例を示したが、第三の環状長尺体60Aを使用した場合であって、その第三の環状長尺体60Aに第三の仕切り板を設置して、第一の仕切り板と第三の仕切り板を分離しておいても良い。
また、第一の仕切り板41Aの初期位置調整をしておいてから、サーボモータ110によって第一の仕切り板41Aの設置間隔L0に相当した定寸駆動を行うように移動パルス量を予め設定するようにしておけば、仕切到来センサ124bを省略することも可能である。
【0021】
次に、この発明の実施の形態1に係る搬送装置の構成概要とそれにともなう効果を説明する。
上述の説明で明らかな通り、この発明の実施の形態1に係る搬送装置100Aは、サーボモータ110からプーリである駆動輪を介して循環駆動されるタイミングベルトである環状長尺体を備え、その環状長尺体によって、一定長の可変長移送物品90を前後方向に移送する可変長物品の搬送装置100Aである。
そして、駆動輪と環状長尺体は第一の環状長尺体40Aを駆動する第一の駆動輪10Aaと、第二の環状長尺体50Aを駆動する第二の駆動輪20Aaと、第三の環状長尺体60Aを駆動する第三の駆動輪30Aaとに分割されて並走するようになっている。
第二の駆動輪20Aaは第一の駆動輪10Aaおよび第三の駆動輪30Aaの間に配置されると共に、第二の環状長尺体50Aは第一の環状長尺体40Aと第三の環状長尺体60Aの間に配置されている。
【0022】
可変長移送物品90の前後には第一の環状長尺体40Aおよび第三の環状長尺体60Aに固定された第一の仕切り板41Aと、第二の環状長尺体50Aに固定された第二の仕切り板51Aとが配置されて、第一の仕切り板41Aと第二の仕切り板51Aとで規制される範囲を超えた揺動が制限されている。
第一の仕切り板41Aと第二の仕切り板51Aの間隔は、第一の駆動輪10Aa、第二の駆動輪20Aaおよび第三の駆動輪30Aaをサーボモータ110に連結するときの連結角度調整機構70Aによって可変長移送物品90の前後寸法Lxに応じて調整され、第一の駆動輪10Aa、第二の駆動輪20Aaおよび第三の駆動輪30Aaは共通のサーボモータ110から同一の回転速度で駆動される。
可変長移送物品90は第一の環状長尺体40A、第二の環状長尺体50Aおよび第三の環状長尺体60Aの移動前端部で第一の仕切り板41Aと第二の仕切り板51Aの間に搭載され、第一の環状長尺体40A、第二の環状長尺体50Aおよび第三の環状長尺体60Aの移動後端部で取出しされるようになっている。
【0023】
なお、第三の駆動輪30Aaと第三の環状長尺体60Aを省略しても良い。
上述の通り、この発明の実施の形態1に係る搬送装置100Aでは、第二の環状長尺体50Aを挟んで第一の環状長尺体40Aと第三の環状長尺体60Aが並走し、第一の仕切り板41Aによって前側または後側のストッパを構成するようになっている。
従って、可変長移送物品90の移送方向である前後方向と直交する幅方向の寸法が大きな可変長移送物品90に対して、サーボモータ110を急加速・急減速したときに、仕切り板や環状長尺体に対してねじれ荷重が発生せず、可変長移送物品90の位置を安定することができるという効果を奏する。
【0024】
第一の仕切り板41Aと第二の仕切り板51Aは、第一の環状長尺体40A、第二の環状長尺体50Aおよび第三の環状長尺体60Aの移動方向102に対して一定の設置間隔L0で複数個が固定され、可変長移送物品90は前後寸法Lxが同一である複数のものが継続して順次移送されるようになっている。
上述の通り、この発明の実施の形態1に係る搬送装置100Aでは、第一の環状長尺体40A、第二の環状長尺体50Aおよび第三の環状長尺体60Aには複数個の第一の仕切り板41Aおよび第二の仕切り板51Aが所定の間隔で固定されている。
従って、前後寸法が同一である複数の可変長移送物品90を移送するときに、絶え間なく順次移送することができるので能率が向上するという効果を奏する。
【0025】
第一の環状長尺体40A、第二の環状長尺体50Aおよび第三の環状長尺体60Aには、それらの移動方向102に沿って所定間隔で静止設置された複数の作業ステーションが設けられている。
これら複数の作業ステーションは可変長移送物品90を搭載する開始ステーションS1と、加工処理を行う一箇所または複数箇所の付加ステーションS2と、可変長移送物品90を取出す終了ステーションS3によって構成されている。
サーボモータ110は間欠駆動制御手段を備え、その間欠駆動制御手段は第一の環状長尺体40A、第二の環状長尺体50A、第三の環状長尺体60Aを開始ステーションS1、付加ステーションS2、終了ステーションS3の間隔に相当する所定距離分だけ駆動してから、作業ステーションにおける作業時間に相当した所定時間だけ停止し、引き続いて移動と停止を繰返す。
上述の通り、この発明の実施の形態1に係る搬送装置100Aでは、サーボモータ110は間欠駆動制御手段を備え、可変長移送物品90は複数の作業ステーションの位置で一旦停止するようになっている。
従って、可変長移送物品90の搬入処理、搬出処理および加工処理機構が簡略化されるという効果を奏する。
なお、このように駆動と停止を間欠に高頻度に行うためには、可変長移送物品90を所定位置に安定させておく前後の仕切り板が有効であり、様々な前後寸法のものがある可変長移送物品90に対して、前後の仕切り板の間隔を自由に調整できることが肝要である。
【0026】
間欠駆動制御手段はサーボモータ110の回転量を検出するエンコーダ111を備え、設定された回転量の回転動作を行ってからサーボモータ110を停止し、設定された停止時間の経過に伴って再度回転動作を開始する駆動制御装置123となっている。
上述の通り、この発明の実施の形態1に係る搬送装置では、サーボモータ110は移動量が設定可能な間欠駆動制御手段を備えている。
従って、作業ステーションの間隔が変更されても、間欠駆動距離を手軽に設定変更することができるという効果を奏する。
【0027】
第二の駆動輪20Aaは、第一の駆動輪10Aaと第三の駆動輪30Aaの回転駆動軸101に対して回動可能に軸承され、連結角度調整機構70Aは第二の駆動輪20Aaに設けられた円弧状の長窓22と、その長窓22を介して第一の駆動輪10Aa、第二の駆動輪20Aaおよび第三の駆動輪30Aaを一体化固定する固定ねじ71によって構成されている。
固定ねじ71を緩めた状態で第一の駆動輪10Aaおよび第一の駆動輪10Aaに固定された第三の駆動輪30Aa(以下、第一の駆動輪10Aaと省略する)と第二の駆動輪20Aaとの相対角度関係を調整して、対象とする可変長移送物品90の前後寸法Lxに合わせて仕切り板の前後間隔を調整してから固定ねじ71を締め付け固定するようになっている。
上述の通り、この発明の実施の形態1に係る搬送装置100Aでは、第二の駆動輪20Aaは円弧状の長窓22を介して固定ねじ71によって第一の駆動輪10Aaおよび第三の駆動輪30Aaと一体化する連結角度調整機構を備えている。
従って、簡易な調整機構によって前後の仕切り板の間隔を無段階で調整することができ
るという効果を奏する。
【0028】
第一の駆動輪10Aaまたは第三の駆動輪30Aaの一方は、固定ねじ71が螺合する少なくとも4個のねじ穴12を備えると共に、第二の駆動輪20Aaには複数個の長窓22が設けられている。
固定ねじ71を取外した状態で第一の駆動輪10Aaと第二の駆動輪20Aaとの相対角度関係を調整して、対象とする可変長移送物品90の前後寸法Lxに合わせて仕切り板の前後間隔を調整してから、複数の長窓22から少なくとも2本の固定ねじ71を用いて、ねじ穴12に対して締め付け固定するようになっている。
上述の通り、この発明の実施の形態1に係る搬送装置では、第一の駆動輪10Aaまたは第三の駆動輪30Aaの一方は、固定ねじ71が螺合する少なくとも4個のねじ穴12を備えると共に、第二の駆動輪20Aaには複数個の長窓22が設けられている。
従って、駆動輪の周長よりも仕切り板の間隔を広くしたい場合であっても、第一の駆動輪10Aaと第二の駆動輪20Aaとの相対角度関係を360度以上の多回転で調整することができるという効果を奏する。
【0029】
第二の駆動輪20Aaの端面には歯数の多いリングギア25が固定され、第一の駆動輪10Aaまたは第三の駆動輪30Aaの内部にはリングギア25と噛合う少歯数のピニオンギア35を有する調整回転軸36が回動可能に軸承されて公転し、第一の駆動輪10Aaと第二の駆動輪20Aaとの相対角度関係は、調整回転軸36を回動することによって調整されるようになっている。
上述の通り、この発明の実施の形態1に係る搬送装置では、第一の駆動輪10Aaと第二の駆動輪20Aaとの相対角度の調整は、リングギア25と噛合うピニオンギア35を介して回動調整するようになっている。
従って、回動調整に必要なトルクが小さくて作業性に優れ、微妙な角度調整を手軽に行うことができるという効果を奏する。
【0030】
サーボモータ110は調整回転軸36の公転角度を所定位置で停止させる初期設定制御手段121aを包含する全体制御装置121によって指令制御され、所定の公転角度位置では着脱可能なハンドル38が挿入され、そのハンドル38の回動軸を調整回転軸36に連結してからハンドル38を回動することによって第一の駆動輪10Aaと第二の駆動輪20Aaの相対角度を調整するようになっている。
上述の通り、この発明の実施の形態1に係る搬送装置100Aでは、初期設定制御手段121aによって調整回転軸36の公転角度位置をハンドル38の挿入位置に合わせてから、調整回転軸36を駆動するためのハンドル38が挿入されて角度調整がおこなわれるようになっている。
従って、初期調整作業が簡略化され、備え付けのハンドル38を用いて手軽に角度調整を行うことができるという効果を奏する。
【0031】
全体制御装置121は、運転許可制御手段121bを包含すると共に、ハンドル38は不使用時に所定の位置に取外して格納され、ハンドル38が所定位置に格納されたことを検出する安全スイッチ125を備えている。
運転許可制御手段121bは安全スイッチ125が作動したことによってサーボモータ110に対する給電を許可するようになっている。
上述の通り、この発明の実施の形態1に係る搬送装置100Aでは、調整回転軸36のハンドル38を装着したままではサーボモータ110への給電が行えないようになっている。
従って、誤ってサーボモータ110の駆動が行われて装置を損傷する危険性がなくなるという効果を奏する。
【0032】
第一の駆動輪10Aaまたは第三の駆動輪30Aaには目盛り34を付した円弧状の表示窓33が設けられ、その表示窓33には第二の駆動輪20Aaに埋設固定された表示ピン23が挿入されている。
上述の通り、この発明の実施の形態1に係る搬送装置100Aでは、第一の駆動輪10Aaと第二の駆動輪20Aaの連結相対角度は表示ピン23が挿入される表示窓33の目盛り34によって目視できるようになっている。
従って、目盛り位置と第一の仕切り板41Aと第二の仕切り板51Aの間隔との対応関係をグラフ化しておくことによって、手軽に仕切り板の間隔調整が行なえるという効果を奏する。
【0033】
第二の仕切り板51Aの平面部には複数個のボールプランジャ53が設置され、そのボールプランジャ53は搭載された可変長移送物品90を第一の仕切り板41Aの方向へ押圧するスプリングを内蔵すると共に、可変長移送物品90の表面で転動する滑動球体を包含している。
上述の通り、この発明の実施の形態1に係る搬送装置100Aでは、第二の仕切り板51Aにボールプランジャ53が設置され、搭載された可変長移送物品90を第一の仕切り板41Aの方向へ押圧するようになっている。
従って、第一の仕切り板41Aおよび第二の仕切り板51Aと可変長移送物品90との間に発生する隙間によって物品の揺動が発生せず、可変長移送物品90の搭載が容易になると共に、可変長移送物品90が梱包容器である場合にはその梱包容器に対して精度よく物品を収納することができるという効果を奏する。
【0034】
第一の仕切り板41Aには第二の仕切り板51Aとの違いを識別するための変形部位である識別部材43が設けられていると共に、その識別部材43と対向して仕切到来センサ124bが静止設置されていて、仕切到来センサ124bの動作に応動して可変長移送物品90の搭載が行われるようになっている。
上述の通り、この発明の実施の形態1に係る搬送装置100Aでは、仕切到来センサ124bによって第一の仕切り板41Aの到来を検出してから可変長移送物品90の搭載が行われるようになっている。
従って、連結角度調整機構によって位置が変動しない第一の仕切り板41Aの位置を基準にして精度よく可変長移送物品90の搭載が行われるという効果を奏する。
【0035】
実施の形態2.
(1)構成の詳細な説明
次に、この発明の第二実施形態である搬送装置100Bの上面図である図8と、図8のものの側面図である図9について、図1・図2のものとの相違点を中心にして説明する。なお、各図において同一符号は同一又は相当部分を示している。
図8・図9において、第一の駆動輪10Baと第一の従動輪10Bbはチェーンである第一の環状長尺体40Bが張架されるスプロケットホイールであり、第二の駆動輪20Baと第二の従動輪20Bbはチェーンである第二の環状長尺体50Bが張架されるスプロケットホイールであり、第三の駆動輪30Baと第三の従動輪30Bbはチェーンである第三の環状長尺体60Bが張架されるスプロケットホイールである。
そして、第一の駆動輪10Ba、第二の駆動輪20Baおよび第三の駆動輪30Baは、減速機を内蔵したインダクションモータ130から間欠駆動機構131と回転駆動軸101を介して一体駆動されて、各長尺体は移動方向102の方向に並行移動する。
このインダクションモータ130は図14で後述する制御盤140によって駆動制御される。
また、回転駆動軸101は図9で示す静止体80aによって軸承されていると共に、図示しない従動軸は図9で示す静止体80bに固定され、第一の従動輪10Bb、第二の従動輪20Bbおよび第三の従動輪30Bbは従動軸に対して互いに自由に転動する。
第二の環状長尺体50Bは第一の環状長尺体40Bと第三の環状長尺体60Bの間に位置し、第二の駆動輪20Baと回転駆動軸101との連結角度は図10、図11で後述する連結角度調整機構70Bによって調整される。
【0036】
第一の仕切り板41Bと第三の仕切り板61Bは、図12で後述するとおり、第一の環状長尺体40Bと第三の環状長尺体60Bに設置されたプロファイルであり、このプロファイルは第一の環状長尺体40Bと第三の環状長尺体60Bの周面に所定の設置間隔L0をおいて均等に設置されている。
第二の仕切り板51Bは、図13で後述するとおり、第二の環状長尺体50Bに設置されたプロファイルであり、このプロファイルも第二の環状長尺体50Bの周面に所定の設置間隔L0をおいて均等に設置されているが、第一の仕切り板41Bおよび第三の仕切り板61Bとの間には可変長移送物品90の前後寸法Lxに相当した間隔が設けられている。
開始ステーションS1は、可変長移送物品90が側面または上方から各長尺体上に搭載される作業開始ステーションであり、仕切到来センサ144bは第一の仕切り板41Bが作業開始ステーションS1に到来したことを検出する。
付加ステーションS2は、例えば可変長移送物品90が梱包容器であって、この梱包容器に対して収納物品を投入する作業ステーションとなっている。
終了ステーションS3は可変長移送物品90を側面または上方へ取り出す作業ステーションである。なお、開始ステーションS1と終了ステーションS3との間には複数の付加ステーションS2が設けられても良い。
【0037】
図10は、この発明の実施の形態2に係る搬送装置の連結角度調整機構の断面図である。図11は、この発明の実施の形態2に係る搬送装置の連結角度調整機構の側面図である。
次に、この発明の実施の形態2に係る搬送装置の連結角度調整機構について説明する。
図10、図11において、静止体80aによって軸承されている回転駆動軸101にはキー11、31が設けられていて、第一の駆動輪10Baはキー11によって回り止めされ、第三の駆動輪30Baはキー31によって回り止めされている。
第二の駆動輪20Baは、軸受21を介して回転駆動軸101に対して回動自在に軸承されている。
第一の駆動輪10Baには180度間隔で2個のねじ穴12が設けられ、第三の駆動輪30Baには180度間隔で2個の貫通穴32が設けられ、第二の駆動輪20Baには図11に示された一対の長窓22が設けられている。
一対の固定ねじ71は貫通穴32と長窓22を通してねじ穴12に螺入し、第一の駆動輪10Ba、第二の駆動輪20Baおよび第三の駆動輪30Baを一体化するようになっていて、固定ねじ71、長窓22およびねじ穴12によって連結角度調整機構70Bが構成されている。
リングギア25は第二の駆動輪20Baの内部にねじ止め固定されており、このリングギア25に噛合う少数歯車であるピニオンギア35は調整回転軸36の一端に固定されている。
【0038】
調整回転軸36は第三の駆動輪30Baの内部の軸受穴37に設けられた軸受によって回動自在に軸承されて、調整回転軸36の他端にはハンドル38が着脱自在に連結されるようになっている。
なお、調整回転軸36は第三の駆動輪30Baの回転に伴って、回転駆動軸101を中心とした公転動作を行うことになるが、ハンドル38の連結位置は例えば調整回転軸36が最下方に公転した位置に限定されていて、ハンドル38が連結されている状態ではインダクションモータ130には給電されないように制御されている。
表示ピン23の一端は第二の駆動輪20Baの端面にねじ止め固定されており、表示ピン23の他端は第三の駆動輪30Baに設けられた円弧状の長穴である表示窓33を貫通し、表示針24がねじ止め固定されている。
表示窓33の端面には図11で示すとおり目盛34が設けられていて、第一の駆動輪10Baおよび第三の駆動輪30Baと第二の駆動輪20Baとの相対角度関係が表示されている。
なお、図11で示された近点ドグスイッチ144aは、第三の駆動輪30Baに設けられた調整回転軸36が所定の直下位置に公転接近したことを検出するスイッチである。
【0039】
図12は、この発明の実施の形態2に係る搬送装置の第一の仕切り板と第三の仕切り板の正面図である。
次に、この発明の実施の形態2に係る搬送装置の第一の仕切り板および第三の仕切り板を詳細に説明する。
図12において、第一の仕切り板41Bと第三の仕切り板61Bは、それぞれ2本の設置ねじ42と2本の設置ねじ62とによって第一の環状長尺体40Bと第三の環状長尺体60Bとの周面に固定されている。
第一の仕切り板41Bの端部に設けられた識別部材43は、第二の仕切り板51Bとの違いを明確にするためのはみ出し変形部位であり、仕切到来センサ144bはこの識別部材43の到来に感応するようになっている。
第一の環状長尺体40B、第二の環状長尺体50Bおよび第三の環状長尺体60Bの下部に静止設置されたレール台80には、各環状長尺体が垂れ下がるのを防止するための第一のレール81b、第二のレール82b、第三のレール83bが敷設されている。
また、第一のレール81bと第三のレール83bの両側には、補助レール81a、81c、83a、83cが敷設されており、この補助レール81a、81c、83a、83cは第一のレール81b、第二のレール82b、第三のレール83bの高さと同等、または各環状長尺体の厚さ寸法未満の寸法分だけ高くなっている。
【0040】
図13は、この発明の実施の形態2に係る搬送装置の第二の仕切り板の平面図である。 次に、この発明の実施の形態2に係る搬送装置の第二の仕切り板を詳細に説明する。
図13において、第二の仕切り板51Bは2本の設置ねじ52によって第二の環状長尺体50Bの周面に固定されている。
また、第二の仕切り板51Bの平面部には複数のボールプランジャ53が固定されており、このボールプランジャ53は搭載された可変長移送物品90を第一の仕切り板41Bおよび第三の仕切り板61Bの方向へ押圧する図示しないスプリングを内蔵すると共に、可変長移送物品90の表面で転動する図示しない滑動球体を包含している。
【0041】
図14は、この発明の実施の形態2に係る搬送装置の制御盤の構成図である。
次に、この発明の実施の形態2に係る搬送装置の制御盤について説明する。
図14において、制御盤140は、例えばプログラマブルコントローラである全体制御装置141と、マンマシンインタフェース機器である設定表示装置142と、可変周波数の交流出力電圧を発生するインバータ143とによって構成されている。
近点ドグスイッチ144aは、調整回転軸36の公転角度が所定位置に接近したことを検出し、全体制御装置141に対して検出信号を入力する。
仕切到来センサ144bは第一の仕切り板41Bが開始ステーションS1に接近したことを検出し、全体制御装置141に対して検出信号を入力する。
安全スイッチ145は、ハンドル38が調整回転軸36から取外されて、所定の収納治具に収納されたことを検出し、全体制御装置141に対して検出信号を入力する。
ゼネバ原点スイッチ146は、インダクションモータ130から駆動される間欠駆動機構131に設けられ、間欠駆動機構131が駆動停止している原点を検出し、全体制御装置141に対して検出信号を入力する。
なお、全体制御装置141は、初期設定制御手段141aと運転許可制御手段141bとなる制御プログラムを包含している。
【0042】
次に、この発明の実施の形態2に係る搬送装置100Bの作用と動作とを詳細に説明する。
図14において、図示しない電源スイッチを投入し、設定表示装置142の表示画面に設けられたタッチスイッチによって段取り作業のための初期設定指令を与えるとインダクションモータ130の制御動作が開始する。
但し、調整回転軸36が所定の位置に停止しているか、又はハンドル38が収納治具から取り出されていて、安全スイッチ145が作動していないときには、運転許可制御手段141bによってインダクションモータ130に対する給電は禁止されるようになっている。
調整回転軸36が所定の位置に停止しておらず、しかもハンドル38が収納治具に収納されていて、安全スイッチ145が作動しているときには、運転許可制御手段141bによってインダクションモータ130に対する給電が許可されて回転動作が開始する。
その結果、調整回転軸36が公転して近点ドグスイッチ144aの設置位置を通過するとインダクションモータ130は初期設定制御手段141aに基づいて減速開始して、ゼネバ原点スイッチ146が動作したことによって停止する。
なお、間欠駆動機構131にはゼネバ機構が使用されているので、インダクションモータ130を連続回転させておいても、間欠歯車の非駆動期間において回転駆動軸101は一時的に停止し、モータ軸が所定角度回転することによって再び回転駆動軸101が回転動作を再開するようになっている。
ゼネバ原点スイッチ146は間欠歯車が非駆動期間となったことを検出して、この時点でインダクションモータ130自体を停止するようになっている。
その停止位置は例えば調整回転軸36が最下方位置である下死点位置に達した位置となるように近点ドグスイッチ144aの動作位置が調整されている。
【0043】
調整回転軸36が下死点位置に到来停止すると、連結角度調整機構70Bによる調整操作が行われる。
図10と図11において、固定ねじ71の締め付けを弛め、ハンドル38を調整回転軸36に挿入してから左右に回動させると、ピニオンギア35とリングギア25によって第二の駆動輪20Baが回動し、第一の仕切り板41Bおよび第三の仕切り板61Bと第二の仕切り板51Bとの間隔が調整される。
この間隔を搭載される可変長移送物品90の前後寸法Lxに略等しく、若干大きい目の寸法に調整してから固定ねじ71を締め付けて、ハンドル38を取外すことによって調整操作が完了する。
なお、ハンドル38による調整操作は図11における長窓22の範囲内で行うことができ、調整角度は表示針24が示す目盛34によって目視することができる。
【0044】
以上のとおりの段取り操作が完了し、図14の設定表示装置142の表示画面に設けられたタッチスイッチによって運転開始指令を与えるとインダクションモータ130の制御動作が開始する。
インダクションモータ130は起動開始してからゼネバ原点スイッチ146が再度動作した時点で駆動停止され、この間で各仕切り板は設定距離L0だけ前進動作する。
インダクションモータ130の回転によって第一の仕切り板41Bが仕切到来センサ144bを通過して、インダクションモータ130が停止すると、開始ステーションS1、付加ステーションS2、終了ステーションS3において可変長移送物品90の搭載、付加作業、取り出しが行われる。
所定時間が経過したタイムスロットの期間内に可変長移送物品90の搭載完了信号、付加作業完了信号、可変長移送物品90の取出完了信号を受信すると再びインダクションモータ130の回転動作が開始する。
このようにして、インダクションモータ130は間欠駆動されるが、可変長移送物品90の移動量は間欠駆動機構131の歯車構成によって決定される。
第一の仕切り板41Bおよび第三の仕切り板61Bと第二の仕切り板51Bとの間に搭載された可変長移送物品90はボールプランジャ53によって押圧され、急加速・急減速に対する揺動が防止されている。
【0045】
なお、上述の説明では、第一の環状長尺体40Bと一体として動作する第三の環状長尺体60Bを用いているが、可変長移送物品90が小幅・軽量である場合には第三の環状長尺体60Bを省略して、第一の環状長尺体40Bと第二の環状長尺体50Bのみを使用しても良い。
また、第三の環状長尺体60Bを使用した場合であっても、第三の環状長尺体60Bに設置された第三の仕切り板61Bを第一の仕切り板41Bと一体のものとしても良い。
【0046】
次に、この発明の実施の形態2に係る搬送装置の構成概要に効果を関連付けて説明する。
この発明の実施の形態2に係る搬送装置100Bは、インダクションモータ130からスプロケットホイールである駆動輪を介して循環駆動されるチェーンである環状長尺体を備え、その環状長尺体によって一定長の可変長移送物品90を前後方向に移送する。
また、搬送装置100Bでの環状長尺体は、第一の駆動輪10Baにより駆動される第一の環状長尺体40Bと、第二の駆動輪20Baにより駆動される第二の環状長尺体50Bと、第三の駆動輪30Baにより駆動される第三の環状長尺体60Bに分割されているとともに並走する。
また、搬送装置100Bでは、可変長移送物品90が搬送される方向に対して可変長移送物品90の後には第一の環状長尺体40Bに固定された第一の仕切り板41Bおよび第三の環状長尺体60Bに固定された第三の仕切り板61Bと可変長移送物品90の前には第二の環状長尺体50Bに固定された第二の仕切り板51Bとが配置されており、可変長移送物品90の揺動が第一の仕切り板41Bおよび第三の仕切り板61Bと第二の仕切り板51Bの間で制限されている。
第一の仕切り板41Bと第三の仕切り板61Bは可変長移送物品90が搬送される方向に対しては揃って移動されるので、第一の仕切り板41Bと第三の仕切り板61Bの位置を第一の仕切り板41Bの位置で代表することができる。
そして、第一の仕切り板41Bと第二の仕切り板51Bの間隔は、第一の駆動輪10Baと第二の駆動輪20Baをインダクションモータ130に連結するときの連結角度調整機構70Bによって可変長移送物品90の前後寸法Lxに応じて調整され、第一の駆動輪10Baと第二の駆動輪20Baは共通のインダクションモータ130から同一の回転速度で駆動される。当然第三の駆動輪30Baは第一の駆動輪10Baと同一の回転速度で駆動されている。
可変長移送物品90は第一の環状長尺体40Bおよび第二の環状長尺体50Bの移動前端部で第一の仕切り板41Bと第二の仕切り板51Bとの間に搭載され、第一の環状長尺体40Bおよび第二の環状長尺体50Bの移動後端部で取出しされるようになっている。
【0047】
なお、可変長移送物品90の幅や重量によっては環状長尺体を第一の環状長尺体40Bと第二の環状長尺体50Bだけにしても良い。このときには、駆動輪は第一の駆動輪10Baと第二の駆動輪20Baだけにし、第三の仕切り板61Bを省略しても良い。
【0048】
第一の仕切り板41B、第二の仕切り板51Bおよび第三の仕切り板61Bは、第一の環状長尺体40B、第二の環状長尺体50Bおよび第三の環状長尺体60Bの移動方向102に対して一定の設置間隔L0で複数個が固定され、前後寸法Lxが同一である複数の可変長移送物品90が継続して順次移送されるようになっている。
【0049】
第一の環状長尺体40B、第二の環状長尺体50B、第三の環状長尺体60Bには、環状長尺体の移動方向に沿って所定間隔で静止設置された複数の作業ステーションが設けられ、作業ステーションは可変長移送物品90を搭載する開始ステーションS1と、加工処理を行う1つまたは複数の付加ステーションS2と、可変長移送物品90を取出す終了ステーションS3によって構成され、インダクションモータ130は間欠駆動制御手段を備え、間欠駆動制御手段は第一の環状長尺体40B、第二の環状長尺体50B、第三の環状長尺体60Bを開始ステーションS1、付加ステーションS2、終了ステーションS3の間隔に相当する所定距離分だけ駆動してから、作業ステーションにおける作業時間に相当した所定時間だけ停止し、引き続いて移動と停止を繰返す。
【0050】
間欠駆動制御手段はインダクションモータ130と第一の駆動輪10Ba、第二の駆動輪20Ba、第三の駆動輪30Baとの間に設けられた間欠駆動機構131となっている。
上述の通り、この発明の実施の形態2に係る搬送装置100Bでは、インダクションモータ130は間欠駆動機構131を備えている。従って、インダクションモータ130は簡易な可変速モータを使用して精度良く所定位置に停止することができると共に、駆動停止期間にあっては必要に応じてモータを停止させておくことによって停止時間の調整が可能となる効果を奏する。
【図面の簡単な説明】
【0051】
【図1】この発明の実施の形態1に係る搬送装置の上面図である。
【図2】この発明の実施の形態1に係る搬送装置の側面図である。
【図3】この発明の実施の形態1に係る搬送装置の連結角度調整機構の断面図である。
【図4】この発明の実施の形態1に係る搬送装置の連結角度調整機構の側面図である。
【図5】この発明の実施の形態1に係る搬送装置の第二の仕切り板の平面図である。
【図6】この発明の実施の形態1に係る搬送装置の第一の仕切り板の平面図である。
【図7】この発明の実施の形態1に係る搬送装置の制御盤のブロック図である。
【図8】この発明の実施の形態2に係る搬送装置の上面図である。
【図9】この発明の実施の形態2に係る搬送装置の側面図である。
【図10】この発明の実施の形態2に係る搬送装置の連結角度調整機構の断面図である。
【図11】この発明の実施の形態2に係る搬送装置の連結角度調整機構の側面図である。
【図12】この発明の実施の形態2に係る搬送装置の第一の仕切り板および第三の仕切り板の正面図である。
【図13】この発明の実施の形態2に係る搬送装置の第二の仕切り板の平面図である。
【図14】この発明の実施の形態2に係る搬送装置の制御盤の構成図である。
【符号の説明】
【0052】
10Aa、10Ba 第一の駆動輪、10Ab、10Bb 第一の従動輪、11 キー、12 穴、20Aa、20Ba 第二の駆動輪、20Ab、20Bb 第二の従動輪、21 軸受、22 長窓、23 表示ピン、24 表示針、25 リングギア、30Aa、30Ba 第三の駆動輪、30Ab、30Bb 第三の従動輪、31 キー、32 貫通穴、33 表示窓、34 目盛、35 ピニオンギア、36 調整回転軸、37 軸受穴、38 ハンドル、40A、40B 第一の環状長尺体、41A、41B 第一の仕切り板、43 識別部材、50A、50B 第二の環状長尺体、51A、51B 第二の仕切り板、53 ボールプランジャ、60A、60B 第三の環状長尺体、61B 第三の仕切り板、70A、70B 連結角度調整機構、80 レール台、80a、80b 静止体、81b、82b、83b レール、81a、81c、83a、83c 補助レール、90 可変長移送物品、100A、100B 搬送装置、101 回転駆動軸、102 移動方向、110 サーボモータ、111 エンコーダ、120 制御盤、121a 初期設定制御手段、121b 運転許可制御手段、121 全体制御装置、122 設定表示装置、123 駆動制御装置、124a 近点ドグスイッチ 124b 仕切到来センサ、125 安全スイッチ、130 インダクションモータ、131 間欠駆動機構、140 制御盤、141 全体制御装置、141a 初期設定制御手段、141b 運転許可制御手段、142 設定表示装置、143 インバータ、144a 近点ドグスイッチ、144b 仕切到来センサ、145 安全スイッチ、146 ゼネバ原点スイッチ、
S1 開始ステーション、S2 付加ステーション、S3 終了ステーション。
【特許請求の範囲】
【請求項1】
モータにより駆動輪を介して循環駆動される環状長尺体を備え、上記環状長尺体上に搭載された一定長の可変長移送物品を前後方向に移送する搬送装置であって、
上記駆動輪は上記モータに連結された回転駆動軸に固定される第一の駆動輪および上記第一の駆動輪と連結角度調整機構を介して連結される第二の駆動輪を備え、
上記環状長尺体は上記第一の駆動輪により駆動される第一の環状長尺体および上記第2の駆動輪により駆動される第二の環状長尺体を備え、
上記可変長移送物品の移送方向の後側に配置されるとともに上記第一の環状長尺体に固定される第一の仕切り板および上記可変長移送物品の移送方向の前側に配置されるとともに上記第二の環状長尺体に固定される第二の仕切り板を備え、
上記第一の仕切り板と上記第二の仕切り板の間隔は、上記第二の駆動輪を上記第一の駆動輪に連結するときに上記連結角度調整機構によって上記可変長移送物品の前後寸法に対応するよう調整され、
上記可変長移送物品は上記環状長尺体の移動前端部で上記第一の仕切り板と上記第二の仕切り板の間に搭載され、上記環状長尺体の移動後端部で取り出されることを特徴とする搬送装置。
【請求項2】
上記第一の駆動輪との間に上記第二の駆動輪を挟むように上記回転駆動軸に固定される第三の駆動輪および上記第三の駆動輪により駆動される第三の環状長尺体を備え、
上記第三の環状長尺体には上記第一の仕切り板が固定されるまたは上記第一の仕切り板と並ぶように第三の仕切り板が固定されることを特徴とする請求項1に記載の搬送装置。
【請求項3】
上記第一の仕切り板および上記第二の仕切り板は、上記環状長尺体の移動方向に対して一定の設置間隔で複数個が固定され、前後寸法が同じ上記可変長移送物品が順次継続して移送されることを特徴とする請求項1または2に記載の搬送装置。
【請求項4】
上記環状長尺体の移送方向に沿った側に所定間隔離間して静止設置された複数の作業ステーションを備え、
上記作業ステーションは、上記可変長移送物品を搭載する開始ステーション、加工処理を行う1つまたは複数の付加ステーションおよび上記可変長移送物品を取出す終了ステーションによって構成され、
上記モータは、上記環状長尺体を上記所定間隔だけ移動させてから上記作業ステーションでの作業時間だけ停止することを繰り返す間欠駆動制御手段を備えることを特徴とする請求項1乃至3のいずれか一項に記載の搬送装置。
【請求項5】
上記間欠駆動制御手段は、上記モータと上記回転駆動軸との間に設けられた間欠駆動機構であることを特徴とする請求項4に記載の搬送装置。
【請求項6】
上記間欠駆動制御手段は、上記モータの回転量を検出するエンコーダを備え、予め設定された回転量だけ上記モータを回転してから一旦停止し、予め設定された停止時間だけ上記モータを停止してから上記モータの回転を開始する駆動制御装置であることを特徴とする請求項4に記載の搬送装置。
【請求項7】
上記第二の駆動輪は、上記回転駆動軸に対して回動可能に軸承され、
上記連結角度調整機構は、上記第二の駆動輪に設けられた円弧状の長窓と、上記長窓を通されて上記第一の駆動輪、第二の駆動輪および第三の駆動輪を一体化固定する固定ねじとによって構成され、上記固定ねじを緩めた状態で、上記第一の仕切り板と上記第2の仕切り板との間隔が上記可変長移送物品の前後寸法に対応するよう上記第一の駆動輪と上記第二の駆動輪との相対角度を調整してから上記固定ねじを締め付けて固定することを特徴とする請求項2に記載の搬送装置。
【請求項8】
上記第一の駆動輪または上記第三の駆動輪の一方は、上記固定ねじが螺合する少なくとも4個のねじ穴が設けられ、上記第二の駆動輪は複数個の長窓が設けられ、上記固定ねじを取外した状態で上記第一の駆動輪と上記第二の駆動輪との相対角度を調整してから上記複数の長窓を通して少なくとも2本の上記固定ねじを上記ねじ穴に螺合して締め付けて固定することを特徴とする請求項7に記載の搬送装置。
【請求項9】
上記第二の駆動輪の端面には歯数の多いリングギアが固定され、
上記ねじ穴が設けられていない上記第一の駆動輪または上記第三の駆動輪の内部に上記リングギアと噛合う少歯数のピニオンギアを有する調整回転軸が回動可能に軸承されて公転し、
上記第一の駆動輪と上記第二の駆動輪との相対角度は、上記調整回転軸を回動することによって調整することを特徴とする請求項8に記載の搬送装置。
【請求項10】
上記モータは上記調整回転軸の公転角度を所定位置で停止させる初期設定制御手段を含む全体制御装置によって指令制御され、上記所定の公転角度位置では着脱可能なハンドルが挿入され、上記ハンドルの回動軸を上記調整回転軸に連結してから上記ハンドルを回動することによって上記第一の駆動輪と上記第二の駆動輪の相対角度を調整することを特徴とする請求項9に記載の搬送装置。
【請求項11】
上記全体制御装置は、運転許可制御手段を含み、上記ハンドルは不使用時に所定の位置に取外して格納され、上記ハンドルが所定位置に格納されたことを検出する安全スイッチを備え、上記運転許可制御手段は上記安全スイッチが作動したことによって上記モータに対する給電を許可することを特徴とする請求項10に記載の搬送装置。
【請求項12】
上記ねじ穴が設けられていない上記第一の駆動輪または上記第三の駆動輪は目盛りを付けた円弧状の表示窓が設けられ、上記表示窓には上記第二の駆動輪に埋設固定された表示ピンが挿入されていることを特徴とする請求項9に記載の搬送装置。
【請求項13】
上記第二の仕切り板の平面部にはボールプランジャが設置され、上記ボールプランジャは搭載された上記可変長移送物品を上記第一の仕切り板の方向へ押圧するスプリングを内蔵するとともに、上記可変長移送物品の表面で転動する滑動球体を包含していることを特徴とする請求項1に記載の搬送装置。
【請求項14】
上記第一の仕切り板には上記第二の仕切り板との違いを識別するための識別部材が設けられていると共に、上記識別部材と対向して仕切到来センサが静止設置されていて、上記仕切到来センサの動作に応動して上記可変長移送物品の搭載が行われることを特徴とする請求項13に記載の搬送装置。
【請求項1】
モータにより駆動輪を介して循環駆動される環状長尺体を備え、上記環状長尺体上に搭載された一定長の可変長移送物品を前後方向に移送する搬送装置であって、
上記駆動輪は上記モータに連結された回転駆動軸に固定される第一の駆動輪および上記第一の駆動輪と連結角度調整機構を介して連結される第二の駆動輪を備え、
上記環状長尺体は上記第一の駆動輪により駆動される第一の環状長尺体および上記第2の駆動輪により駆動される第二の環状長尺体を備え、
上記可変長移送物品の移送方向の後側に配置されるとともに上記第一の環状長尺体に固定される第一の仕切り板および上記可変長移送物品の移送方向の前側に配置されるとともに上記第二の環状長尺体に固定される第二の仕切り板を備え、
上記第一の仕切り板と上記第二の仕切り板の間隔は、上記第二の駆動輪を上記第一の駆動輪に連結するときに上記連結角度調整機構によって上記可変長移送物品の前後寸法に対応するよう調整され、
上記可変長移送物品は上記環状長尺体の移動前端部で上記第一の仕切り板と上記第二の仕切り板の間に搭載され、上記環状長尺体の移動後端部で取り出されることを特徴とする搬送装置。
【請求項2】
上記第一の駆動輪との間に上記第二の駆動輪を挟むように上記回転駆動軸に固定される第三の駆動輪および上記第三の駆動輪により駆動される第三の環状長尺体を備え、
上記第三の環状長尺体には上記第一の仕切り板が固定されるまたは上記第一の仕切り板と並ぶように第三の仕切り板が固定されることを特徴とする請求項1に記載の搬送装置。
【請求項3】
上記第一の仕切り板および上記第二の仕切り板は、上記環状長尺体の移動方向に対して一定の設置間隔で複数個が固定され、前後寸法が同じ上記可変長移送物品が順次継続して移送されることを特徴とする請求項1または2に記載の搬送装置。
【請求項4】
上記環状長尺体の移送方向に沿った側に所定間隔離間して静止設置された複数の作業ステーションを備え、
上記作業ステーションは、上記可変長移送物品を搭載する開始ステーション、加工処理を行う1つまたは複数の付加ステーションおよび上記可変長移送物品を取出す終了ステーションによって構成され、
上記モータは、上記環状長尺体を上記所定間隔だけ移動させてから上記作業ステーションでの作業時間だけ停止することを繰り返す間欠駆動制御手段を備えることを特徴とする請求項1乃至3のいずれか一項に記載の搬送装置。
【請求項5】
上記間欠駆動制御手段は、上記モータと上記回転駆動軸との間に設けられた間欠駆動機構であることを特徴とする請求項4に記載の搬送装置。
【請求項6】
上記間欠駆動制御手段は、上記モータの回転量を検出するエンコーダを備え、予め設定された回転量だけ上記モータを回転してから一旦停止し、予め設定された停止時間だけ上記モータを停止してから上記モータの回転を開始する駆動制御装置であることを特徴とする請求項4に記載の搬送装置。
【請求項7】
上記第二の駆動輪は、上記回転駆動軸に対して回動可能に軸承され、
上記連結角度調整機構は、上記第二の駆動輪に設けられた円弧状の長窓と、上記長窓を通されて上記第一の駆動輪、第二の駆動輪および第三の駆動輪を一体化固定する固定ねじとによって構成され、上記固定ねじを緩めた状態で、上記第一の仕切り板と上記第2の仕切り板との間隔が上記可変長移送物品の前後寸法に対応するよう上記第一の駆動輪と上記第二の駆動輪との相対角度を調整してから上記固定ねじを締め付けて固定することを特徴とする請求項2に記載の搬送装置。
【請求項8】
上記第一の駆動輪または上記第三の駆動輪の一方は、上記固定ねじが螺合する少なくとも4個のねじ穴が設けられ、上記第二の駆動輪は複数個の長窓が設けられ、上記固定ねじを取外した状態で上記第一の駆動輪と上記第二の駆動輪との相対角度を調整してから上記複数の長窓を通して少なくとも2本の上記固定ねじを上記ねじ穴に螺合して締め付けて固定することを特徴とする請求項7に記載の搬送装置。
【請求項9】
上記第二の駆動輪の端面には歯数の多いリングギアが固定され、
上記ねじ穴が設けられていない上記第一の駆動輪または上記第三の駆動輪の内部に上記リングギアと噛合う少歯数のピニオンギアを有する調整回転軸が回動可能に軸承されて公転し、
上記第一の駆動輪と上記第二の駆動輪との相対角度は、上記調整回転軸を回動することによって調整することを特徴とする請求項8に記載の搬送装置。
【請求項10】
上記モータは上記調整回転軸の公転角度を所定位置で停止させる初期設定制御手段を含む全体制御装置によって指令制御され、上記所定の公転角度位置では着脱可能なハンドルが挿入され、上記ハンドルの回動軸を上記調整回転軸に連結してから上記ハンドルを回動することによって上記第一の駆動輪と上記第二の駆動輪の相対角度を調整することを特徴とする請求項9に記載の搬送装置。
【請求項11】
上記全体制御装置は、運転許可制御手段を含み、上記ハンドルは不使用時に所定の位置に取外して格納され、上記ハンドルが所定位置に格納されたことを検出する安全スイッチを備え、上記運転許可制御手段は上記安全スイッチが作動したことによって上記モータに対する給電を許可することを特徴とする請求項10に記載の搬送装置。
【請求項12】
上記ねじ穴が設けられていない上記第一の駆動輪または上記第三の駆動輪は目盛りを付けた円弧状の表示窓が設けられ、上記表示窓には上記第二の駆動輪に埋設固定された表示ピンが挿入されていることを特徴とする請求項9に記載の搬送装置。
【請求項13】
上記第二の仕切り板の平面部にはボールプランジャが設置され、上記ボールプランジャは搭載された上記可変長移送物品を上記第一の仕切り板の方向へ押圧するスプリングを内蔵するとともに、上記可変長移送物品の表面で転動する滑動球体を包含していることを特徴とする請求項1に記載の搬送装置。
【請求項14】
上記第一の仕切り板には上記第二の仕切り板との違いを識別するための識別部材が設けられていると共に、上記識別部材と対向して仕切到来センサが静止設置されていて、上記仕切到来センサの動作に応動して上記可変長移送物品の搭載が行われることを特徴とする請求項13に記載の搬送装置。
【図1】



【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】

【図12】
【図13】

【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2010−37029(P2010−37029A)
【公開日】平成22年2月18日(2010.2.18)
【国際特許分類】
【出願番号】特願2008−200565(P2008−200565)
【出願日】平成20年8月4日(2008.8.4)
【出願人】(591036457)三菱電機エンジニアリング株式会社 (419)
【Fターム(参考)】
【公開日】平成22年2月18日(2010.2.18)
【国際特許分類】
【出願日】平成20年8月4日(2008.8.4)
【出願人】(591036457)三菱電機エンジニアリング株式会社 (419)
【Fターム(参考)】
[ Back to top ]