
搬送装置
【課題】必要とされるコストを抑えつつ、任意の型の容器を確実かつ安定的に反転させることが可能な搬送装置を提供すること。
【解決手段】本発明に係る搬送装置100は、所定の間隔をおいて対向する2つの側壁211、側壁の間に搬送方向に沿って一列に回動自在に配置された上部ローラー212、及び、側壁の間に上部ローラーに212対向するように搬送方向に沿って一列に回動自在に配置された下部ローラー213、により形成され、2つの側壁と上部ローラー212と下部ローラー213とにより囲まれた収容領域210aに容器を収容するように構成された、箱型の回転体210と、中心軸の周りに回動自在となるように回転体210を支持する筐体220と、筐体220に取り付けられ回転体210を回動させるモーター230と、を具備する。
【解決手段】本発明に係る搬送装置100は、所定の間隔をおいて対向する2つの側壁211、側壁の間に搬送方向に沿って一列に回動自在に配置された上部ローラー212、及び、側壁の間に上部ローラーに212対向するように搬送方向に沿って一列に回動自在に配置された下部ローラー213、により形成され、2つの側壁と上部ローラー212と下部ローラー213とにより囲まれた収容領域210aに容器を収容するように構成された、箱型の回転体210と、中心軸の周りに回動自在となるように回転体210を支持する筐体220と、筐体220に取り付けられ回転体210を回動させるモーター230と、を具備する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般的に容器(釜など)を搬送する搬送装置に関し、特に容器の反転動作を含む搬送装置に関する。
【背景技術】
【0002】
使用済みの容器(例えば釜)をコンベヤ上に載置して下流側に向かって搬送し、その搬送の途中において釜を洗浄するように構成された搬送装置が、特開平9−313347号公報(特許文献1)に開示されている。特許文献1に開示された搬送装置においては、表面が上方を向いた状態でコンベヤに載置された釜が、反転機構によって反転させられることにより表面が下方を向いた状態でコンベヤに載置された後、洗浄機構によって洗浄されるようになっている。
【0003】
釜に対する反転動作を担う反転機構は、F字状の断面形状を有する反転アームにより構成されている。この反転アームは、その断面コ字状の開放端をこの反転アームに向かって搬送されてくる釜の把手に向けるように配置されている。釜が、下流側に向かって進行することによって、反転アームの断面コ字状の部分に挿入され反転アームと係合する。この後、反転アームが180度回転することにより、反転アームと係合した釜が、表面が下方を向いた状態でコンベヤに載置される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平9−313347号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記従来技術に係る搬送装置には様々な問題がある。
まず第1に、コンベヤに載置され搬送される釜と反転アームとの間の位置関係が必ずしも常に一定となるとは限られないため、釜の把手の位置と反転アームの断面コ字状の開放端の位置との間にずれが生ずる場合がある。この場合、両者が適切に係合できないため、釜が適切に反転されない可能性がある。
第2に、反転アームは、釜の把手に係合することによって、釜を保持して反転させることができるものである。よって、反転アームによって反転させることが可能な釜は、予め定められた形状(特に把手の形状)を有するものに限定される。例えば、丸釜などの特殊な釜を用いることはできない。
さらに、釜の搬送は、コンベヤ、モーターローラー及びモーター等によって実現されているので、必要とされるコストが高くなる。
また、釜と蓋とはセットで用いられることが一般的である。ところが、特許文献1には、釜の搬送ラインと蓋の搬送ラインとを兼用する構成が明記されていないため、蓋の搬送ラインが釜の搬送ラインとは独立して別個に設けられていると考えられる。よって、必要とされるコストがさらに高くなる。
【0006】
本発明は、このような問題点の少なくとも1つに対処することが可能な搬送装置を提供することを目的としてなされたものである。
【課題を解決するための手段】
【0007】
本発明に係る搬送装置は、容器を搬送方向に搬送する搬送装置であって、所定の間隔をおいて対向する2つの側壁、該2つの側壁の間に前記搬送方向に沿って一列に回動自在に配置された複数の上部ローラー、及び、前記2つの側壁の間に該複数の上部ローラーに対向するように前記搬送方向に沿って一列に回動自在に配置された複数の下部ローラーにより形成され、前記2つの側壁と前記上部ローラーと前記下部ローラーとにより囲まれた収容領域に容器を収容するように構成された、箱型の回転体と、該回転体を中心軸の周りに回動自在となるように該回転体を支持する支持手段と、該支持手段に取り付けられ前記回転体を回動させる回動制御手段と、を具備することを特徴とする。
【発明の効果】
【0008】
本発明によれば、容器全体を収容した回転体を反転させることによって、容器の反転動作を実現するので、必要とされるコストを抑えつつ、任意の型の容器を確実かつ安定的に反転させることができる。
【図面の簡単な説明】
【0009】
【図1】図1は、本発明の実施の形態に係る搬送装置100を示す斜視図である。
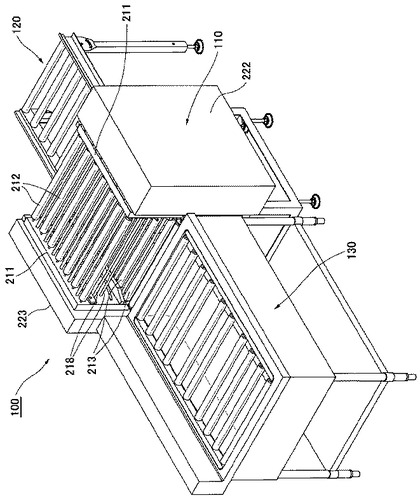
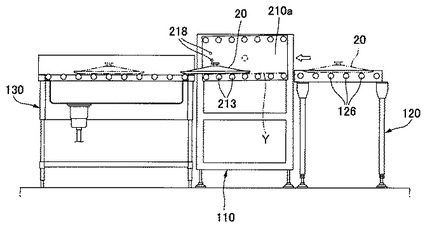
【図1A】図1Aは、図1に示した搬送装置100を下流側からみて示す斜視図である。
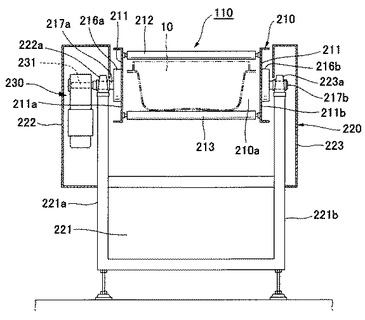
【図2】図2は、図1に示した主搬送装置110を搬送方向の上流側(図1の矢印A)からみて簡略的に示す断面図である。
【図3】図3は、図1に示した主搬送装置110を搬送方向に直交する方向(図1の矢印B)からみて簡略的に示す断面図である。
【図4】図4は、本発明の実施の形態に係る搬送装置100が釜10を搬送する動作を示す模式図である。
【図5】図5は、本発明の実施の形態に係る搬送装置100が釜10を搬送する動作を示す模式図である。
【図6】図6は、本発明の実施の形態に係る搬送装置100が釜10を搬送する動作を示す模式図である
【図7】図7は、本発明の実施の形態に係る搬送装置100が蓋20を搬送する動作を示す模式図である。
【発明を実施するための形態】
【0010】
以下、添付図面を参照して本発明を詳細に説明する。なお、添付図面における共通する構成要素に対しては、同一の参照符号が付されている。
なお、以下に説明する本発明の実施の形態では、搬送される容器の具体例として釜及び蓋を用いる場合について説明するが、本発明は、どのような形状を有する釜、蓋及び他の容器についても同様に適用可能なものである。
【0011】
1.概要
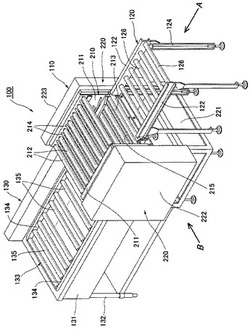
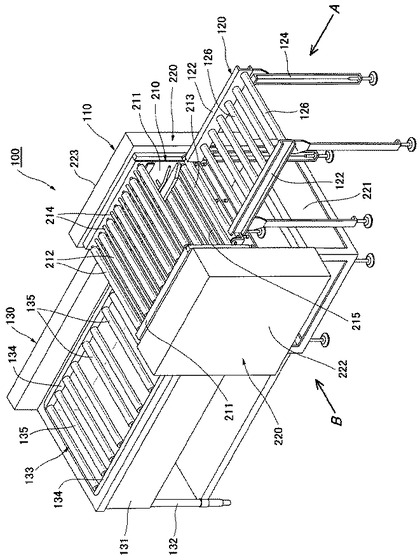
図1は、本発明の実施の形態に係る搬送装置100を示す斜視図である。
本実施の形態に係る搬送装置100は、大きく分けて、主搬送装置110と、主搬送装置110の上流側に隣接して配置された上流搬送装置120と、主搬送装置110の下流側に隣接して配置された下流搬送装置130と、を含む。
概略的にいえば、上流搬送装置120により搬送されてきた釜は、主搬送装置110によって反転させられた後、下流搬送装置130により図示しない下流に設けられた別の洗浄装置にまで搬送される。一方、上流搬送装置120により搬送されてきた蓋は、主搬送装置110により反転させられることなく通過し、下流搬送装置130により釜と同様に図示しない別の洗浄装置にまで搬送される。
【0012】
2.上流搬送装置120の構成
上流搬送装置120は、図1に示すように、搬送方向に沿って相互に平行に延びる2つのフレーム122と、フレーム122に対して取り付けられ鉛直方向に延びる複数のベース部材124と、2つのフレーム122間に相互に間隔をおいて配置され、フレーム122に対して回動可能となるように取り付けられた複数のローラー126と、により構成されている。
なお、図1においては、上流搬送装置120の一部分のみが示されているに過ぎないが、実際には、上流搬送装置120は上流側に向かってさらに延びているものである。
各ローラー126は、全体的に円柱形状又は円筒形状を有する。各ローラー126の上端面を繋ぐ平面(すなわち釜及び蓋が載置される載置面)は1つの水平な面となっている。ローラー126に載置された釜又は蓋は、図示しない操作者によって搬送方向の下流側に向かって押圧されると、釜又は蓋に当接するローラー126が回動させられることにより、ローラー126によって下流側に向かって搬送される。
【0013】
3.主搬送装置110の構成
図1に加えて図2及び図3を参照して主搬送装置110を説明する。
図2は、図1に示した主搬送装置110を搬送方向の上流側(図1の矢印A)からみて簡略的に示す断面図である。図3は、図1に示した主搬送装置110を搬送方向に直交する方向(図1の矢印B)からみて簡略的に示す断面図である。
【0014】
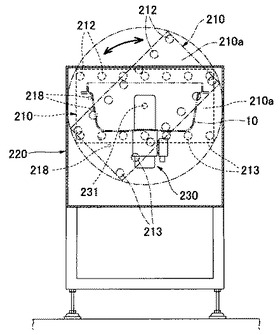
主搬送装置110は、大きく分けると、箱型の回転体210と、回転体210を回動自在に支持する筐体220と、筐体220に取り付けられ(例えば収容され)回転体210を回動させるモーター230と、を含む。
【0015】
3−1.回転体210の構成
回転体210は、所定の間隔をおいて対向する2つの側壁211、211と、これら2つの側壁211の間に搬送方向に沿って一列に回動自在に配置された複数の上部ローラー212と、2つの側壁211の間に上部ローラー212に対向するように搬送方向に沿って一列に回動自在に配置された複数の下部ローラー213と、によって箱型形状となるように形成されている。
【0016】
各上部ローラー212は、全体的に円柱形状又は円筒形状を有する。各上部ローラー212の上端面を繋ぐ平面は、1つの平面を形成し、さらに、各上部ローラー212の下端面を繋ぐ平面も、1つの平面を形成している。
各下部ローラー213もまた、全体的に円柱形状又は円筒形状を有する。各下部ローラー213の上端面を繋ぐ平面は、1つの平面を形成し、さらに、各下部ローラー213の下端面を繋ぐ平面も、1つの平面を形成している。
【0017】
隣接する2つの上部ローラー212の間には、両端がそれぞれ2つの側壁211に固定された支持部材214が設けられている。隣接する2つの下部ローラー213の間にも、両端がそれぞれ2つの側壁211に固定された支持部材215が設けられている(なお、図2及び図3においては、支持部材214、215の表現が省略されている)。
【0018】
この回転体210は、2つの側壁211と、一列に配置された上部ローラー212と、一列に配置された下部ローラー213とにより囲まれた収容領域210aに、釜10を収容する。
【0019】
さらに、2つの側壁211の間において、搬送方向の下流側付近に、ストッパー(停止部材)218が設けられている。本実施の形態では、ストッパー218として、例えば、2つの棒状部材218が用いられている。各棒状部材218は、図1Aから明らかなように、その一端及び他端がそれぞれ各側壁211の内面に固定されている。各棒状部材218は、(特に図3に示すように)下部ローラー213の上に載置された釜10に当接して、釜10の下流側へのさらなる移動を阻止する一方、下部ローラー213の上に載置された(図示しない)蓋(釜10より高さが低い)には当接せず、蓋の下流側へのさらなる移動を許容するように、下部ローラー213からの高さが調整されている。
【0020】
各側壁211の外面211a、211bには、(図2に示すように)それぞれ、固定部材216a、216bによって、シャフト217a、217bが固定されている。これらシャフト217a、217bの中心軸は、同一軸上にある。
【0021】
3−2.筐体220の構成
筐体220は、回転体210を回動自在となるように支持する。筐体220は、地面に配置される直方体形状を有する基部221と、互いに対向するように基部221に固定された2つの箱体222、223と、を含む。具体的には、基部221は、その側壁221a、221bを上方に延長させている。これら側壁221a、221bに対して、それぞれ、箱体222、223が固定されている。これにより、箱体222が、回転体210の側壁211の外面211aに対向し、箱体223が、回転体210の外面211bに対向している。
【0022】
図2に示すように、箱体222の内部には、軸受け222aが収容及び固定されている。この軸受け222aが回転体210のシャフト217aを回動自在となるように支持している。同様に、箱体223の内部にも、軸受け223aが収容及び固定されている。この軸受け223aが回転体210のシャフト217bを回動自在となるように支持している。これにより、回転体210は、そのシャフト217a、217bを中心軸として回動することができる。
【0023】
図2に示すように、筐体220は、回転体210の上方を開放している。また、筐体220は、回転体210の回動を妨げないように、回転体210の下方に充分な空間を設けている。よって、回転体210が回動する際には、回転体210は、図3に示すように、その回動を筐体220によって阻害されることはない。
【0024】
3−3.モーター230の構成
箱体222の内部には、回転体210を回動させるモーター230が収容及び固定されている。モーター230のシャフト231が回転体210のシャフト217aに機械的に接続されている。このモーター230の回転を制御する制御部、及び、この制御部に接続された操作パネルは、図示されていないが、従来のものを用いることができる。なお、操作パネル(図示しない)は、例えば箱体222の外面に設けることができる。操作者がこのような操作パネルに対する所定の押圧動作を行うことに応じて、制御部(図示しない)がモーター230のシャフト231を正転又は逆転させることにより、回転体210が正転又は逆転させられる。
【0025】
なお、本実施の形態では、モーター230、制御部(図示しない)及び操作パネル(図示しない)が箱体222に取り付けられる場合について説明したが、これらの構成要素は、箱体223に取り付けられるようにしてもよいし、箱体222、223とは独立に設けてもよい。
【0026】
4.下流搬送装置130の構成
図1に示すように、下流搬送装置130は、直方体形状を有するシンク131と、シンク131の底面に取り付けられ鉛直方向に延びるベース部材132と、シンク131の上面に配置された搬送部133と、を含む。
【0027】
搬送部133は、搬送方向に沿って相互に平行に延びる2つのフレーム134と、2つのフレーム134間に相互に間隔をおいて配置され、フレーム134に対して回動可能となるように取り付けられた複数のローラー135と、により構成されている。各ローラー135は、全体的に円柱形状又は円筒形状を有する。
また、図1には示されていないが、シンク131内には、ローラー135の上に載置された釜又は蓋に対して下方から洗浄液を噴出する洗浄装置を搭載してもよい。この場合、下流搬送装置130は、主搬送装置110から受け入れた釜及び蓋を搬送するだけでなく洗浄することもできる。
【0028】
各ローラー135の上端面を繋ぐ平面(すなわち釜及び蓋が載置される載置面)は1つの水平な面となっている。ローラー135に載置された釜及び蓋は、図示しない操作者によって搬送方向の下流側に向かって押圧されると、釜又は蓋に当接するローラー135が回動させられることにより、ローラー135によって下流側に向かって搬送される。
【0029】
5.搬送装置100の動作
上記のように説明した構成を有する搬送装置100の動作について、先に用いた図1〜図3に加え、図4〜図7を参照して説明する。
図4〜図6は、本発明の実施の形態に係る搬送装置100が釜10を搬送する動作を示す模式図である。図7は、本発明の実施の形態に係る搬送装置100が蓋20を搬送する動作を示す模式図である。
【0030】
まず、図4を参照すると、上流搬送装置120の下流側に隣接して主搬送装置110が配置され、主搬送装置110の下流側に隣接して下流搬送装置130が配置されている。
上流搬送装置120の各ローラー126の上端面を繋ぐ平面、すなわち、各ローラー126により形成される載置面Xは、水平面となっている。下流搬送装置130の各ローラー135の上端面を繋ぐ平面、すなわち、各ローラー135により形成される載置面Zもまた、水平面となっている。
【0031】
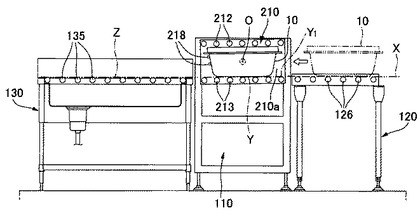
図4は、主搬送装置110の回転体210が第1状態(通常状態)で静止している様子を示している。すなわち、回転体210が第1状態にあるときには、下部ローラー213が上部ローラー212の下方に位置している。回転体210が第1状態にあるときには、各下部ローラー213の上端面を繋ぐ平面、すなわち、各下部ローラー213により形成される載置面Yは、搬送方向の下流側に向かって下降する傾斜面となっている。
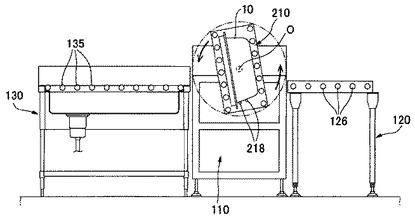
図4と比較すると、図6は、主搬送装置110の回転体210が第2状態(反転状態)で静止している様子を示している。すなわち、回転体210が第2状態にあるときには、上部ローラー212が下部ローラー213の下方に位置している。回転体210が第2状態にあるときには、各上部ローラー212の下端面を繋ぐ平面、すなわち、各上部ローラー212により形成される載置面Y'は、搬送方向の下流側に向かって下降する傾斜面となっている。
【0032】
図4に戻って、主搬送装置110の載置面Yと、上流搬送装置120の載置面Xとの関係について説明すると、上流搬送装置120の載置面Xが主搬送装置110の(第1状態にある回転体210の)載置面Yの上流側の端部Y1とが略同一の高さとなるように、載置面X及び載置面Yの高さが設定されている。
一方、図6に戻って、主搬送装置110の載置面Y'と、下流搬送装置130の載置面Zとの関係について説明すると、下流搬送装置130の載置面Zが主搬送装置110の(第2状態にある回転体210の)載置面Y’の下流側の端部Y'2とが略同一の高さとなるように、載置面Z及び載置面Y'の高さが設定されている。
【0033】
まず、図4を参照すると、上流搬送装置120のローラー126上に釜10が載置されている。操作者が釜10を搬送方向の下流側に向かって押圧すると、釜10の底面と当接したローラー126が回動することにより、釜10が下流側に向かって搬送される。釜10がさらに下流側に向かって搬送されると、釜10は、主搬送装置110の(第1状態にある)回転体210の収容領域210aの内部に進行する。なお、上流搬送装置120の載置面Xは、下流側に向かって下降する傾斜面となるように形成することができるものである。これにより、釜10を下流側に移動させるのに操作者に必要とされる力を低減することができる。
【0034】
回転体210の収容領域210aの内部に進行した釜10は、下部ローラー213の上に載置される。上述したように、回転体210が第1状態にあるときには、各下部ローラー213により形成される載置面Yは、下流側に向かって下降するように傾斜している。よって、回転体210の収容領域210aの内部に入った釜10は、載置面Yが傾斜している影響を受けて、下流側に向かってさらに進行することになる。このような進行を続ける釜10は、やがて収容領域210a内に設けられたストッパー218に当接して静止する。
【0035】
次に、操作者は、図2に示した箱体222に収容されたモーター230を(図示しない操作パネルを操作することによって)正転させるような指示を、箱体222に収容された制御部(図示しない)に伝える。これに応答した制御部がモーター230を正転させることによって、図5に示すように、モーター230の正転によって回転体210もまた正転(紙面上半時計回りに回動)する。
【0036】
この後、回転体210は回動を停止して図6に示すように静止した第2状態(反転状態)となる。回転体210が第2状態にあるときには、上述したように、載置面Y'の下流側の端部Y'2が下流搬送装置130の載置面Zと略同一の高さとなる。なお、回転体210の第1状態から第2状態への移行は、制御部が例えば予め定められた回転量だけモーター230を正転させることにより実現される。
【0037】
図6に示すように、回転体210が第2状態に到達したときには、釜10の下流側には、もはや釜10の下流側への移動を阻止するものが存在しない(ストッパー218は、釜10の上流側に位置している)。さらにこの状態では、各上部ローラー212により形成された傾斜面Y'は、下流側に向かって下降している。よって、釜10は、この傾斜面Y'及び重力の影響によって、下流側への移動を開始して、回転体210の収容領域210aから排出され、下流搬送装置130のローラー135の上に載置され静止する。
【0038】
なお、本実施の形態では、最も好ましい実施の形態として、第1状態にある回転体210により形成される載置面Y(図4参照)と、第2状態にある回転体210により形成される載置面Y’(図6参照)とが、略同一平面となるように構成されている。これは、回転体210の中心軸Oを載置面Yと載置面Y’との中間に配置することにより可能である。
これにより、回転体210の回動により反転された釜10が、回転体210から排出され下流搬送装置130に渡される。
【0039】
回転体210から釜10が排出された後、制御部(図示せず)が、操作者による操作パネル(図示せず)に対する操作に応答して、又は、自発的に、モーター230を逆転させる。モーター230の逆転により、回転体210も逆転する。これにより、第2状態(図6)にあった回転体210は、第1状態(図4)に戻る。
【0040】
以上のように、上流反転装置120に表面を上方に向けて搬送されてきた釜10は、主搬送装置110によって反転させられ、表面を下方に向けた状態で下流搬送装置130にまで搬送される。なお、下流搬送装置130の載置面Zは、下流側に向かって下降する傾斜面となるように形成することができるものである。これにより、釜10を下流側に移動させるのに操作者に必要とされる力を低減することができる。
【0041】
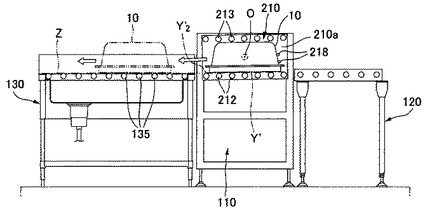
他方、本実施の形態に係る搬送装置100は、釜10の搬送と蓋20の搬送とを兼用することもできる。
図7を参照すると、上流搬送装置120のローラー126上に載置された蓋20もまた、操作者によって下流側に向かって押圧されることにより、ローラー126上を転がり、回転体210の収容領域210a内に進行する。さらに、下流側に向かって下降する載置面Yを形成する各ローラー213上を自重により転がる。釜10とは異なり、蓋20は、下流側への進行をストッパー218により阻止されることはない。よって、蓋20は、回転体210の収容領域210aを脱し、下流搬送装置130に到達する。
【0042】
なお、本実施の形態では、最も好ましい形態を示すために、回転体210の載置面Y及びY'が下流側に向かって下降するように傾斜している場合について説明したが、本発明はこれに限定されるものではなく、回転体210の載置面Y及び/又は載置面Y'を、上流搬送装置120の載置面X及び下流搬送装置130の載置面Zと同様に、水平となるように構成してもよい。
【0043】
また、本実施の形態では、第2状態にある回転体210を第1状態に戻す際に、回転体210を逆転させる場合を例にとり説明した。しかしながら、第2状態にある回転体210をさらに正転させて第1状態に戻すことも可能である。
【0044】
以上説明したように、本発明によれば、釜などの容器の反転は、この容器を収容した回転体自体を回動させることにより実行される。よって、回転体に収容可能な容器であれば、いなかる型及び大きさの容器(例えば把手のない釜や特殊な形状の容器)でも反転させることができる。しかも、この容器の反転動作には、容器と回転体との正確な係合関係が必要とされないので、確実かつ容易に容器を反転させることができる。
【0045】
さらに、本発明では、容器の搬送は、コンベヤのような高いコストを要する部品によって実現されているのではなく、水平面を形成するように又は下流側に向かって下降する傾斜面を形成するように配置されたローラーによって実現されている。よって、容器の搬送に必要とされるコストを大幅に削減することができるとともに、省電力化を図ることができる。
【0046】
また、本発明によれば、1種類の容器の搬送のみに特化するのではなく、形状の異なる複数種類の容器(例えば釜及び蓋)の搬送を兼用することができる。よって、必要なコストを抑えつつ、様々な用途に対応することが可能な搬送装置を提供することができる。
【0047】
さらにまた、本発明では、回転体の載置面を下流側に向かって下降する傾斜面とすることができる。これにより、容器は、回転体への進入及び回転体からの排出を、少なくとも部分的に自重により転がることによって行うことができる。これにより、コンベヤやモーターなどの部品を削減することができるので、省電力化を図ることができる。また、操作者に要求される力(容器に対する押圧力)をも低減することができる。
【0048】
加えて、容器の反転は、容器に備わった把手などの部分に対する係合を必要とせず、単に、回転体内に収容される容器の下流側に設けた係止部材(ストッパー)を容器の側面に係止させた状態で、回転体自体を回動させることによって、実現されるものである。これにより、反転させる容器に損傷を与える可能性を抑えることができる。
【0049】
なお、上記実施の形態では、最も好ましい形態として、省電力を図るために、上流搬送装置120及び下流搬送装置130の各ローラーが単に回動自在となるように設けられた場合について説明した。しかしながら、操作者に必要とされる力(容器に対する押圧力)を低減するために、上流搬送装置120及び下流搬送装置130のうちの少なくとも一方のローラーをモータ等により回動させるようにしてもよい。
【符号の説明】
【0050】
10 釜
20 蓋
100 搬送装置
110 主搬送装置
120 上流搬送装置
126 ローラー
130 下流搬送装置
135 ローラー
210 回転体
210a 収容領域
211 側壁
212 上部ローラー
213 下部ローラー
216a、216b 固定部材
217a、217b シャフト
218 ストッパー
220 筐体
221 基部
222、223 箱体
230 モーター
X 上流搬送装置の各ローラー126により形成される載置面
Y 主搬送装置の各下部ローラー213により形成される載置面
Y1 載置面Yの上流側の端部
Y' 主搬送装置の各上部ローラー212により形成される載置面
Y'2 載置面Y'の下流側の端部
Z 下流搬送装置の各ローラー135により形成される載置面
【技術分野】
【0001】
本発明は、一般的に容器(釜など)を搬送する搬送装置に関し、特に容器の反転動作を含む搬送装置に関する。
【背景技術】
【0002】
使用済みの容器(例えば釜)をコンベヤ上に載置して下流側に向かって搬送し、その搬送の途中において釜を洗浄するように構成された搬送装置が、特開平9−313347号公報(特許文献1)に開示されている。特許文献1に開示された搬送装置においては、表面が上方を向いた状態でコンベヤに載置された釜が、反転機構によって反転させられることにより表面が下方を向いた状態でコンベヤに載置された後、洗浄機構によって洗浄されるようになっている。
【0003】
釜に対する反転動作を担う反転機構は、F字状の断面形状を有する反転アームにより構成されている。この反転アームは、その断面コ字状の開放端をこの反転アームに向かって搬送されてくる釜の把手に向けるように配置されている。釜が、下流側に向かって進行することによって、反転アームの断面コ字状の部分に挿入され反転アームと係合する。この後、反転アームが180度回転することにより、反転アームと係合した釜が、表面が下方を向いた状態でコンベヤに載置される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平9−313347号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記従来技術に係る搬送装置には様々な問題がある。
まず第1に、コンベヤに載置され搬送される釜と反転アームとの間の位置関係が必ずしも常に一定となるとは限られないため、釜の把手の位置と反転アームの断面コ字状の開放端の位置との間にずれが生ずる場合がある。この場合、両者が適切に係合できないため、釜が適切に反転されない可能性がある。
第2に、反転アームは、釜の把手に係合することによって、釜を保持して反転させることができるものである。よって、反転アームによって反転させることが可能な釜は、予め定められた形状(特に把手の形状)を有するものに限定される。例えば、丸釜などの特殊な釜を用いることはできない。
さらに、釜の搬送は、コンベヤ、モーターローラー及びモーター等によって実現されているので、必要とされるコストが高くなる。
また、釜と蓋とはセットで用いられることが一般的である。ところが、特許文献1には、釜の搬送ラインと蓋の搬送ラインとを兼用する構成が明記されていないため、蓋の搬送ラインが釜の搬送ラインとは独立して別個に設けられていると考えられる。よって、必要とされるコストがさらに高くなる。
【0006】
本発明は、このような問題点の少なくとも1つに対処することが可能な搬送装置を提供することを目的としてなされたものである。
【課題を解決するための手段】
【0007】
本発明に係る搬送装置は、容器を搬送方向に搬送する搬送装置であって、所定の間隔をおいて対向する2つの側壁、該2つの側壁の間に前記搬送方向に沿って一列に回動自在に配置された複数の上部ローラー、及び、前記2つの側壁の間に該複数の上部ローラーに対向するように前記搬送方向に沿って一列に回動自在に配置された複数の下部ローラーにより形成され、前記2つの側壁と前記上部ローラーと前記下部ローラーとにより囲まれた収容領域に容器を収容するように構成された、箱型の回転体と、該回転体を中心軸の周りに回動自在となるように該回転体を支持する支持手段と、該支持手段に取り付けられ前記回転体を回動させる回動制御手段と、を具備することを特徴とする。
【発明の効果】
【0008】
本発明によれば、容器全体を収容した回転体を反転させることによって、容器の反転動作を実現するので、必要とされるコストを抑えつつ、任意の型の容器を確実かつ安定的に反転させることができる。
【図面の簡単な説明】
【0009】
【図1】図1は、本発明の実施の形態に係る搬送装置100を示す斜視図である。
【図1A】図1Aは、図1に示した搬送装置100を下流側からみて示す斜視図である。
【図2】図2は、図1に示した主搬送装置110を搬送方向の上流側(図1の矢印A)からみて簡略的に示す断面図である。
【図3】図3は、図1に示した主搬送装置110を搬送方向に直交する方向(図1の矢印B)からみて簡略的に示す断面図である。
【図4】図4は、本発明の実施の形態に係る搬送装置100が釜10を搬送する動作を示す模式図である。
【図5】図5は、本発明の実施の形態に係る搬送装置100が釜10を搬送する動作を示す模式図である。
【図6】図6は、本発明の実施の形態に係る搬送装置100が釜10を搬送する動作を示す模式図である
【図7】図7は、本発明の実施の形態に係る搬送装置100が蓋20を搬送する動作を示す模式図である。
【発明を実施するための形態】
【0010】
以下、添付図面を参照して本発明を詳細に説明する。なお、添付図面における共通する構成要素に対しては、同一の参照符号が付されている。
なお、以下に説明する本発明の実施の形態では、搬送される容器の具体例として釜及び蓋を用いる場合について説明するが、本発明は、どのような形状を有する釜、蓋及び他の容器についても同様に適用可能なものである。
【0011】
1.概要
図1は、本発明の実施の形態に係る搬送装置100を示す斜視図である。
本実施の形態に係る搬送装置100は、大きく分けて、主搬送装置110と、主搬送装置110の上流側に隣接して配置された上流搬送装置120と、主搬送装置110の下流側に隣接して配置された下流搬送装置130と、を含む。
概略的にいえば、上流搬送装置120により搬送されてきた釜は、主搬送装置110によって反転させられた後、下流搬送装置130により図示しない下流に設けられた別の洗浄装置にまで搬送される。一方、上流搬送装置120により搬送されてきた蓋は、主搬送装置110により反転させられることなく通過し、下流搬送装置130により釜と同様に図示しない別の洗浄装置にまで搬送される。
【0012】
2.上流搬送装置120の構成
上流搬送装置120は、図1に示すように、搬送方向に沿って相互に平行に延びる2つのフレーム122と、フレーム122に対して取り付けられ鉛直方向に延びる複数のベース部材124と、2つのフレーム122間に相互に間隔をおいて配置され、フレーム122に対して回動可能となるように取り付けられた複数のローラー126と、により構成されている。
なお、図1においては、上流搬送装置120の一部分のみが示されているに過ぎないが、実際には、上流搬送装置120は上流側に向かってさらに延びているものである。
各ローラー126は、全体的に円柱形状又は円筒形状を有する。各ローラー126の上端面を繋ぐ平面(すなわち釜及び蓋が載置される載置面)は1つの水平な面となっている。ローラー126に載置された釜又は蓋は、図示しない操作者によって搬送方向の下流側に向かって押圧されると、釜又は蓋に当接するローラー126が回動させられることにより、ローラー126によって下流側に向かって搬送される。
【0013】
3.主搬送装置110の構成
図1に加えて図2及び図3を参照して主搬送装置110を説明する。
図2は、図1に示した主搬送装置110を搬送方向の上流側(図1の矢印A)からみて簡略的に示す断面図である。図3は、図1に示した主搬送装置110を搬送方向に直交する方向(図1の矢印B)からみて簡略的に示す断面図である。
【0014】
主搬送装置110は、大きく分けると、箱型の回転体210と、回転体210を回動自在に支持する筐体220と、筐体220に取り付けられ(例えば収容され)回転体210を回動させるモーター230と、を含む。
【0015】
3−1.回転体210の構成
回転体210は、所定の間隔をおいて対向する2つの側壁211、211と、これら2つの側壁211の間に搬送方向に沿って一列に回動自在に配置された複数の上部ローラー212と、2つの側壁211の間に上部ローラー212に対向するように搬送方向に沿って一列に回動自在に配置された複数の下部ローラー213と、によって箱型形状となるように形成されている。
【0016】
各上部ローラー212は、全体的に円柱形状又は円筒形状を有する。各上部ローラー212の上端面を繋ぐ平面は、1つの平面を形成し、さらに、各上部ローラー212の下端面を繋ぐ平面も、1つの平面を形成している。
各下部ローラー213もまた、全体的に円柱形状又は円筒形状を有する。各下部ローラー213の上端面を繋ぐ平面は、1つの平面を形成し、さらに、各下部ローラー213の下端面を繋ぐ平面も、1つの平面を形成している。
【0017】
隣接する2つの上部ローラー212の間には、両端がそれぞれ2つの側壁211に固定された支持部材214が設けられている。隣接する2つの下部ローラー213の間にも、両端がそれぞれ2つの側壁211に固定された支持部材215が設けられている(なお、図2及び図3においては、支持部材214、215の表現が省略されている)。
【0018】
この回転体210は、2つの側壁211と、一列に配置された上部ローラー212と、一列に配置された下部ローラー213とにより囲まれた収容領域210aに、釜10を収容する。
【0019】
さらに、2つの側壁211の間において、搬送方向の下流側付近に、ストッパー(停止部材)218が設けられている。本実施の形態では、ストッパー218として、例えば、2つの棒状部材218が用いられている。各棒状部材218は、図1Aから明らかなように、その一端及び他端がそれぞれ各側壁211の内面に固定されている。各棒状部材218は、(特に図3に示すように)下部ローラー213の上に載置された釜10に当接して、釜10の下流側へのさらなる移動を阻止する一方、下部ローラー213の上に載置された(図示しない)蓋(釜10より高さが低い)には当接せず、蓋の下流側へのさらなる移動を許容するように、下部ローラー213からの高さが調整されている。
【0020】
各側壁211の外面211a、211bには、(図2に示すように)それぞれ、固定部材216a、216bによって、シャフト217a、217bが固定されている。これらシャフト217a、217bの中心軸は、同一軸上にある。
【0021】
3−2.筐体220の構成
筐体220は、回転体210を回動自在となるように支持する。筐体220は、地面に配置される直方体形状を有する基部221と、互いに対向するように基部221に固定された2つの箱体222、223と、を含む。具体的には、基部221は、その側壁221a、221bを上方に延長させている。これら側壁221a、221bに対して、それぞれ、箱体222、223が固定されている。これにより、箱体222が、回転体210の側壁211の外面211aに対向し、箱体223が、回転体210の外面211bに対向している。
【0022】
図2に示すように、箱体222の内部には、軸受け222aが収容及び固定されている。この軸受け222aが回転体210のシャフト217aを回動自在となるように支持している。同様に、箱体223の内部にも、軸受け223aが収容及び固定されている。この軸受け223aが回転体210のシャフト217bを回動自在となるように支持している。これにより、回転体210は、そのシャフト217a、217bを中心軸として回動することができる。
【0023】
図2に示すように、筐体220は、回転体210の上方を開放している。また、筐体220は、回転体210の回動を妨げないように、回転体210の下方に充分な空間を設けている。よって、回転体210が回動する際には、回転体210は、図3に示すように、その回動を筐体220によって阻害されることはない。
【0024】
3−3.モーター230の構成
箱体222の内部には、回転体210を回動させるモーター230が収容及び固定されている。モーター230のシャフト231が回転体210のシャフト217aに機械的に接続されている。このモーター230の回転を制御する制御部、及び、この制御部に接続された操作パネルは、図示されていないが、従来のものを用いることができる。なお、操作パネル(図示しない)は、例えば箱体222の外面に設けることができる。操作者がこのような操作パネルに対する所定の押圧動作を行うことに応じて、制御部(図示しない)がモーター230のシャフト231を正転又は逆転させることにより、回転体210が正転又は逆転させられる。
【0025】
なお、本実施の形態では、モーター230、制御部(図示しない)及び操作パネル(図示しない)が箱体222に取り付けられる場合について説明したが、これらの構成要素は、箱体223に取り付けられるようにしてもよいし、箱体222、223とは独立に設けてもよい。
【0026】
4.下流搬送装置130の構成
図1に示すように、下流搬送装置130は、直方体形状を有するシンク131と、シンク131の底面に取り付けられ鉛直方向に延びるベース部材132と、シンク131の上面に配置された搬送部133と、を含む。
【0027】
搬送部133は、搬送方向に沿って相互に平行に延びる2つのフレーム134と、2つのフレーム134間に相互に間隔をおいて配置され、フレーム134に対して回動可能となるように取り付けられた複数のローラー135と、により構成されている。各ローラー135は、全体的に円柱形状又は円筒形状を有する。
また、図1には示されていないが、シンク131内には、ローラー135の上に載置された釜又は蓋に対して下方から洗浄液を噴出する洗浄装置を搭載してもよい。この場合、下流搬送装置130は、主搬送装置110から受け入れた釜及び蓋を搬送するだけでなく洗浄することもできる。
【0028】
各ローラー135の上端面を繋ぐ平面(すなわち釜及び蓋が載置される載置面)は1つの水平な面となっている。ローラー135に載置された釜及び蓋は、図示しない操作者によって搬送方向の下流側に向かって押圧されると、釜又は蓋に当接するローラー135が回動させられることにより、ローラー135によって下流側に向かって搬送される。
【0029】
5.搬送装置100の動作
上記のように説明した構成を有する搬送装置100の動作について、先に用いた図1〜図3に加え、図4〜図7を参照して説明する。
図4〜図6は、本発明の実施の形態に係る搬送装置100が釜10を搬送する動作を示す模式図である。図7は、本発明の実施の形態に係る搬送装置100が蓋20を搬送する動作を示す模式図である。
【0030】
まず、図4を参照すると、上流搬送装置120の下流側に隣接して主搬送装置110が配置され、主搬送装置110の下流側に隣接して下流搬送装置130が配置されている。
上流搬送装置120の各ローラー126の上端面を繋ぐ平面、すなわち、各ローラー126により形成される載置面Xは、水平面となっている。下流搬送装置130の各ローラー135の上端面を繋ぐ平面、すなわち、各ローラー135により形成される載置面Zもまた、水平面となっている。
【0031】
図4は、主搬送装置110の回転体210が第1状態(通常状態)で静止している様子を示している。すなわち、回転体210が第1状態にあるときには、下部ローラー213が上部ローラー212の下方に位置している。回転体210が第1状態にあるときには、各下部ローラー213の上端面を繋ぐ平面、すなわち、各下部ローラー213により形成される載置面Yは、搬送方向の下流側に向かって下降する傾斜面となっている。
図4と比較すると、図6は、主搬送装置110の回転体210が第2状態(反転状態)で静止している様子を示している。すなわち、回転体210が第2状態にあるときには、上部ローラー212が下部ローラー213の下方に位置している。回転体210が第2状態にあるときには、各上部ローラー212の下端面を繋ぐ平面、すなわち、各上部ローラー212により形成される載置面Y'は、搬送方向の下流側に向かって下降する傾斜面となっている。
【0032】
図4に戻って、主搬送装置110の載置面Yと、上流搬送装置120の載置面Xとの関係について説明すると、上流搬送装置120の載置面Xが主搬送装置110の(第1状態にある回転体210の)載置面Yの上流側の端部Y1とが略同一の高さとなるように、載置面X及び載置面Yの高さが設定されている。
一方、図6に戻って、主搬送装置110の載置面Y'と、下流搬送装置130の載置面Zとの関係について説明すると、下流搬送装置130の載置面Zが主搬送装置110の(第2状態にある回転体210の)載置面Y’の下流側の端部Y'2とが略同一の高さとなるように、載置面Z及び載置面Y'の高さが設定されている。
【0033】
まず、図4を参照すると、上流搬送装置120のローラー126上に釜10が載置されている。操作者が釜10を搬送方向の下流側に向かって押圧すると、釜10の底面と当接したローラー126が回動することにより、釜10が下流側に向かって搬送される。釜10がさらに下流側に向かって搬送されると、釜10は、主搬送装置110の(第1状態にある)回転体210の収容領域210aの内部に進行する。なお、上流搬送装置120の載置面Xは、下流側に向かって下降する傾斜面となるように形成することができるものである。これにより、釜10を下流側に移動させるのに操作者に必要とされる力を低減することができる。
【0034】
回転体210の収容領域210aの内部に進行した釜10は、下部ローラー213の上に載置される。上述したように、回転体210が第1状態にあるときには、各下部ローラー213により形成される載置面Yは、下流側に向かって下降するように傾斜している。よって、回転体210の収容領域210aの内部に入った釜10は、載置面Yが傾斜している影響を受けて、下流側に向かってさらに進行することになる。このような進行を続ける釜10は、やがて収容領域210a内に設けられたストッパー218に当接して静止する。
【0035】
次に、操作者は、図2に示した箱体222に収容されたモーター230を(図示しない操作パネルを操作することによって)正転させるような指示を、箱体222に収容された制御部(図示しない)に伝える。これに応答した制御部がモーター230を正転させることによって、図5に示すように、モーター230の正転によって回転体210もまた正転(紙面上半時計回りに回動)する。
【0036】
この後、回転体210は回動を停止して図6に示すように静止した第2状態(反転状態)となる。回転体210が第2状態にあるときには、上述したように、載置面Y'の下流側の端部Y'2が下流搬送装置130の載置面Zと略同一の高さとなる。なお、回転体210の第1状態から第2状態への移行は、制御部が例えば予め定められた回転量だけモーター230を正転させることにより実現される。
【0037】
図6に示すように、回転体210が第2状態に到達したときには、釜10の下流側には、もはや釜10の下流側への移動を阻止するものが存在しない(ストッパー218は、釜10の上流側に位置している)。さらにこの状態では、各上部ローラー212により形成された傾斜面Y'は、下流側に向かって下降している。よって、釜10は、この傾斜面Y'及び重力の影響によって、下流側への移動を開始して、回転体210の収容領域210aから排出され、下流搬送装置130のローラー135の上に載置され静止する。
【0038】
なお、本実施の形態では、最も好ましい実施の形態として、第1状態にある回転体210により形成される載置面Y(図4参照)と、第2状態にある回転体210により形成される載置面Y’(図6参照)とが、略同一平面となるように構成されている。これは、回転体210の中心軸Oを載置面Yと載置面Y’との中間に配置することにより可能である。
これにより、回転体210の回動により反転された釜10が、回転体210から排出され下流搬送装置130に渡される。
【0039】
回転体210から釜10が排出された後、制御部(図示せず)が、操作者による操作パネル(図示せず)に対する操作に応答して、又は、自発的に、モーター230を逆転させる。モーター230の逆転により、回転体210も逆転する。これにより、第2状態(図6)にあった回転体210は、第1状態(図4)に戻る。
【0040】
以上のように、上流反転装置120に表面を上方に向けて搬送されてきた釜10は、主搬送装置110によって反転させられ、表面を下方に向けた状態で下流搬送装置130にまで搬送される。なお、下流搬送装置130の載置面Zは、下流側に向かって下降する傾斜面となるように形成することができるものである。これにより、釜10を下流側に移動させるのに操作者に必要とされる力を低減することができる。
【0041】
他方、本実施の形態に係る搬送装置100は、釜10の搬送と蓋20の搬送とを兼用することもできる。
図7を参照すると、上流搬送装置120のローラー126上に載置された蓋20もまた、操作者によって下流側に向かって押圧されることにより、ローラー126上を転がり、回転体210の収容領域210a内に進行する。さらに、下流側に向かって下降する載置面Yを形成する各ローラー213上を自重により転がる。釜10とは異なり、蓋20は、下流側への進行をストッパー218により阻止されることはない。よって、蓋20は、回転体210の収容領域210aを脱し、下流搬送装置130に到達する。
【0042】
なお、本実施の形態では、最も好ましい形態を示すために、回転体210の載置面Y及びY'が下流側に向かって下降するように傾斜している場合について説明したが、本発明はこれに限定されるものではなく、回転体210の載置面Y及び/又は載置面Y'を、上流搬送装置120の載置面X及び下流搬送装置130の載置面Zと同様に、水平となるように構成してもよい。
【0043】
また、本実施の形態では、第2状態にある回転体210を第1状態に戻す際に、回転体210を逆転させる場合を例にとり説明した。しかしながら、第2状態にある回転体210をさらに正転させて第1状態に戻すことも可能である。
【0044】
以上説明したように、本発明によれば、釜などの容器の反転は、この容器を収容した回転体自体を回動させることにより実行される。よって、回転体に収容可能な容器であれば、いなかる型及び大きさの容器(例えば把手のない釜や特殊な形状の容器)でも反転させることができる。しかも、この容器の反転動作には、容器と回転体との正確な係合関係が必要とされないので、確実かつ容易に容器を反転させることができる。
【0045】
さらに、本発明では、容器の搬送は、コンベヤのような高いコストを要する部品によって実現されているのではなく、水平面を形成するように又は下流側に向かって下降する傾斜面を形成するように配置されたローラーによって実現されている。よって、容器の搬送に必要とされるコストを大幅に削減することができるとともに、省電力化を図ることができる。
【0046】
また、本発明によれば、1種類の容器の搬送のみに特化するのではなく、形状の異なる複数種類の容器(例えば釜及び蓋)の搬送を兼用することができる。よって、必要なコストを抑えつつ、様々な用途に対応することが可能な搬送装置を提供することができる。
【0047】
さらにまた、本発明では、回転体の載置面を下流側に向かって下降する傾斜面とすることができる。これにより、容器は、回転体への進入及び回転体からの排出を、少なくとも部分的に自重により転がることによって行うことができる。これにより、コンベヤやモーターなどの部品を削減することができるので、省電力化を図ることができる。また、操作者に要求される力(容器に対する押圧力)をも低減することができる。
【0048】
加えて、容器の反転は、容器に備わった把手などの部分に対する係合を必要とせず、単に、回転体内に収容される容器の下流側に設けた係止部材(ストッパー)を容器の側面に係止させた状態で、回転体自体を回動させることによって、実現されるものである。これにより、反転させる容器に損傷を与える可能性を抑えることができる。
【0049】
なお、上記実施の形態では、最も好ましい形態として、省電力を図るために、上流搬送装置120及び下流搬送装置130の各ローラーが単に回動自在となるように設けられた場合について説明した。しかしながら、操作者に必要とされる力(容器に対する押圧力)を低減するために、上流搬送装置120及び下流搬送装置130のうちの少なくとも一方のローラーをモータ等により回動させるようにしてもよい。
【符号の説明】
【0050】
10 釜
20 蓋
100 搬送装置
110 主搬送装置
120 上流搬送装置
126 ローラー
130 下流搬送装置
135 ローラー
210 回転体
210a 収容領域
211 側壁
212 上部ローラー
213 下部ローラー
216a、216b 固定部材
217a、217b シャフト
218 ストッパー
220 筐体
221 基部
222、223 箱体
230 モーター
X 上流搬送装置の各ローラー126により形成される載置面
Y 主搬送装置の各下部ローラー213により形成される載置面
Y1 載置面Yの上流側の端部
Y' 主搬送装置の各上部ローラー212により形成される載置面
Y'2 載置面Y'の下流側の端部
Z 下流搬送装置の各ローラー135により形成される載置面
【特許請求の範囲】
【請求項1】
容器を搬送方向に搬送する搬送装置であって、
所定の間隔をおいて対向する2つの側壁、該2つの側壁の間に前記搬送方向に沿って一列に回動自在に配置された複数の上部ローラー、及び、前記2つの側壁の間に該複数の上部ローラーに対向するように前記搬送方向に沿って一列に回動自在に配置された複数の下部ローラー、により形成され、前記2つの側壁と前記上部ローラーと前記下部ローラーとにより囲まれた収容領域に容器を収容するように構成された、箱型の回転体と、
該回転体を中心軸の周りに回動自在となるように該回転体を支持する支持手段と、
該支持手段に取り付けられ前記回転体を回動させる回動制御手段と、
を具備することを特徴とする搬送装置。
【請求項2】
前記回転体が、前記2つの側壁の間において前記搬送方向の下流側に設けられた停止部材を有し、
該停止部材は、前記収容領域に収容され前記下部ローラーの上に載置された容器の下流側への移動を阻止する、請求項1に記載の搬送装置。
【請求項3】
前記回転制御手段は、前記回転体の前記下部ローラーが前記上部ローラーの下方に位置する第1状態から前記上部ローラーが前記下部ローラーの下方に位置する第2状態になるまで、該回転体を正転させる、請求項1又は請求項2に記載の搬送装置。
【請求項4】
前記回転制御手段は、前記第2状態から前記第1状態になるまで前記回転体を逆転させる、請求項3に記載の搬送装置。
【請求項5】
前記回転体は、前記第1状態において、前記収容領域に収容された容器を前記下部ローラーの上に載置し、前記第2状態において、該容器を前記上部ローラーの上に載置する、請求項3又は請求項4に記載の搬送装置。
【請求項6】
前記回転体は、前記第1状態において、前記下部ローラーが前記搬送方向上流側から下流側に向かって降下する傾斜面を形成するように構成される、請求項3から請求項5のいずれかに記載の搬送装置。
【請求項7】
前記回転体は、前記第2状態において、前記上部ローラーが前記搬送方向の上流側から下流側に向かって下降する傾斜面を形成するように構成される、請求項3から請求項6のいずれかに記載の搬送装置。
【請求項8】
前記搬送方向に沿って配置され容器を載置して搬送する複数のローラーを有し、該複数のローラーにより形成される載置面が前記回転体の前記上部ローラーの下方に位置する前記下部ローラーにより形成される載置面と略同一の高さとなるように、前記回転体の上流側に配置された上流搬送手段、をさらに具備する請求項1から請求項7のいずれかに記載の搬送装置。
【請求項9】
前記上流搬送手段は、前記複数のローラーの載置面が前記下部ローラーの載置面における前記搬送方向の上流端と略同一の高さとなるように構成される、請求項8に記載の搬送装置。
【請求項10】
前記搬送方向に沿って配置され容器を載置して搬送する複数のローラーを有し、該複数のローラーにより形成される載置面が前記回転体の前記下部ローラーの下方に位置する前記上部ローラーにより形成される載置面と略同一の高さとなるように、前記回転体の下流側に配置された下流搬送手段、をさらに具備する請求項1から請求項9のいずれかに記載の搬送装置。
【請求項11】
前記下流搬送手段は、前記複数のローラーの載置面が前記上部ローラーの載置面における前記搬送方向の下流端と略同一の高さとなるように構成される、請求項10に記載の搬送装置。
【請求項1】
容器を搬送方向に搬送する搬送装置であって、
所定の間隔をおいて対向する2つの側壁、該2つの側壁の間に前記搬送方向に沿って一列に回動自在に配置された複数の上部ローラー、及び、前記2つの側壁の間に該複数の上部ローラーに対向するように前記搬送方向に沿って一列に回動自在に配置された複数の下部ローラー、により形成され、前記2つの側壁と前記上部ローラーと前記下部ローラーとにより囲まれた収容領域に容器を収容するように構成された、箱型の回転体と、
該回転体を中心軸の周りに回動自在となるように該回転体を支持する支持手段と、
該支持手段に取り付けられ前記回転体を回動させる回動制御手段と、
を具備することを特徴とする搬送装置。
【請求項2】
前記回転体が、前記2つの側壁の間において前記搬送方向の下流側に設けられた停止部材を有し、
該停止部材は、前記収容領域に収容され前記下部ローラーの上に載置された容器の下流側への移動を阻止する、請求項1に記載の搬送装置。
【請求項3】
前記回転制御手段は、前記回転体の前記下部ローラーが前記上部ローラーの下方に位置する第1状態から前記上部ローラーが前記下部ローラーの下方に位置する第2状態になるまで、該回転体を正転させる、請求項1又は請求項2に記載の搬送装置。
【請求項4】
前記回転制御手段は、前記第2状態から前記第1状態になるまで前記回転体を逆転させる、請求項3に記載の搬送装置。
【請求項5】
前記回転体は、前記第1状態において、前記収容領域に収容された容器を前記下部ローラーの上に載置し、前記第2状態において、該容器を前記上部ローラーの上に載置する、請求項3又は請求項4に記載の搬送装置。
【請求項6】
前記回転体は、前記第1状態において、前記下部ローラーが前記搬送方向上流側から下流側に向かって降下する傾斜面を形成するように構成される、請求項3から請求項5のいずれかに記載の搬送装置。
【請求項7】
前記回転体は、前記第2状態において、前記上部ローラーが前記搬送方向の上流側から下流側に向かって下降する傾斜面を形成するように構成される、請求項3から請求項6のいずれかに記載の搬送装置。
【請求項8】
前記搬送方向に沿って配置され容器を載置して搬送する複数のローラーを有し、該複数のローラーにより形成される載置面が前記回転体の前記上部ローラーの下方に位置する前記下部ローラーにより形成される載置面と略同一の高さとなるように、前記回転体の上流側に配置された上流搬送手段、をさらに具備する請求項1から請求項7のいずれかに記載の搬送装置。
【請求項9】
前記上流搬送手段は、前記複数のローラーの載置面が前記下部ローラーの載置面における前記搬送方向の上流端と略同一の高さとなるように構成される、請求項8に記載の搬送装置。
【請求項10】
前記搬送方向に沿って配置され容器を載置して搬送する複数のローラーを有し、該複数のローラーにより形成される載置面が前記回転体の前記下部ローラーの下方に位置する前記上部ローラーにより形成される載置面と略同一の高さとなるように、前記回転体の下流側に配置された下流搬送手段、をさらに具備する請求項1から請求項9のいずれかに記載の搬送装置。
【請求項11】
前記下流搬送手段は、前記複数のローラーの載置面が前記上部ローラーの載置面における前記搬送方向の下流端と略同一の高さとなるように構成される、請求項10に記載の搬送装置。
【図1】


【図1A】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図1A】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−6686(P2012−6686A)
【公開日】平成24年1月12日(2012.1.12)
【国際特許分類】
【出願番号】特願2010−142254(P2010−142254)
【出願日】平成22年6月23日(2010.6.23)
【出願人】(592193535)タニコー株式会社 (46)
【Fターム(参考)】
【公開日】平成24年1月12日(2012.1.12)
【国際特許分類】
【出願日】平成22年6月23日(2010.6.23)
【出願人】(592193535)タニコー株式会社 (46)
【Fターム(参考)】
[ Back to top ]