
搬送計量装置
【課題】搬送ベルトの接合部の上下移動に起因する搬送部の振動を抑制し、それにより計量誤差を抑制することができる搬送計量装置を提供する。
【解決手段】搬送ベルト243上の2つの接合部j31,j32は、大局視においてそれぞれ搬送ベルト243の幅方向から傾斜した一方向にのびている。このため、接合部j31,j32の質量が搬送ベルト243の進行方向に分散され、上下方向に関する単位時間当たりの質量の移動量は従来と比べて小さくなる。また、2つの接合部j31,j32は、搬送ベルト243上において互いに最も遠い位置(対蹠位置)に形成されている。このため、2つの接合部j31,j32は互いに上下方向の逆向きに移動し、上下方向に関する質量の移動が相殺される。これらの作用により、接合部j31,j32の上下移動に伴う計量コンベアの振動が抑制され、計量誤差を防止することができる。
【解決手段】搬送ベルト243上の2つの接合部j31,j32は、大局視においてそれぞれ搬送ベルト243の幅方向から傾斜した一方向にのびている。このため、接合部j31,j32の質量が搬送ベルト243の進行方向に分散され、上下方向に関する単位時間当たりの質量の移動量は従来と比べて小さくなる。また、2つの接合部j31,j32は、搬送ベルト243上において互いに最も遠い位置(対蹠位置)に形成されている。このため、2つの接合部j31,j32は互いに上下方向の逆向きに移動し、上下方向に関する質量の移動が相殺される。これらの作用により、接合部j31,j32の上下移動に伴う計量コンベアの振動が抑制され、計量誤差を防止することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被計量物を搬送しつつ当該被計量物の重量を計測する搬送計量装置に関する。
【背景技術】
【0002】
菓子、生鮮食品、飲料品、薬品等の生産ラインにおいては、これらの商品を搬送しつつ当該商品の重量を計測する搬送計量装置が使用されている。搬送計量装置は、主として、商品を搬送するコンベアと、コンベアに接続されたロードセルとを備え、コンベア上において搬送される商品の重量をロードセルにより計測する装置である。搬送計量装置のコンベアは、水平に配置された一対のローラの間に無端状(環状)の搬送ベルトが掛け渡された構成を有し、ローラを回転させることにより搬送ベルトを回動させて搬送ベルト上の商品を搬送する。
【0003】
このような従来の搬送計量装置の構成は、例えば、特許文献1,2に開示されている。
【0004】
【特許文献1】特許第3463827号公報
【特許文献2】特開2002−116079号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
上記の搬送計量装置では、1枚の平ベルトの端部同士を接合することにより無端状とした搬送ベルトが使用されている。このため、搬送ベルト上には接合部が存在し、当該接合部と搬送ベルトの他の部分とでは質量分布が相違する。したがって、接合部がローラに沿って下降または上昇したときには、接合部の質量が上下方向に移動することによってコンベアに微小な振動が生じ、これによりロードセルにおいて測定される計量値に誤差が生じる恐れがあった。
【0006】
このような計量値の誤差は、近年実用化が進んでいるシームレス(接合部のない)タイプの搬送ベルトを使用すれば防止することができる。しかしながら、シームレスタイプの搬送ベルトは接合部を有する搬送ベルトに比べて高価であるため、シームレスタイプの搬送ベルトを使用すると搬送計量装置全体の製造コストを増大させてしまうという問題があった。また、上記の計量誤差は、搬送ベルトの厚みを小さくすれば低減することができる。しかしながら、厚みの小さい搬送ベルトを使用すると、重量の大きな商品や硬度の高い商品に対応出来なくなるという問題があった。
【0007】
本発明は、このような事情に鑑みなされたものであり、シームレスタイプの搬送ベルトを使用することなく、また、搬送ベルトの厚みを小さくすることもなく、接合部の上下移動に起因する搬送部の振動を抑制し、それにより計量誤差を抑制することができる搬送計量装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するため、請求項1に係る発明は、被計量物を搬送しつつ当該被計量物の重量を計測する搬送計量装置であって、無端状の搬送ベルトを回動させることにより前記搬送ベルト上の被計量物を搬送する搬送部と、前記搬送ベルト上において搬送される被計量物の重量を計測する計量部と、を備え、前記搬送ベルトは複数の接合部を有し、前記搬送部において前記複数の接合部のうちのある1つの接合部が上下方向の一方に移動するときには、前記複数の接合部のうちの他の1つの接合部が上下方向の他方に移動するように、前記複数の接合部の位置が定められていることを特徴とする。
【0009】
請求項2に係る発明は、請求項1に記載の搬送計量装置であって、前記搬送ベルトは、水平に配置された一対のローラの間に掛け渡されているとともに、互いに対蹠位置に設けられた2つの接合部を有することを特徴とする。
【0010】
請求項3に係る発明は、請求項1または請求項2に記載の搬送計量装置であって、前記接合部は、前記搬送ベルトの幅方向に対して傾斜していることを特徴とする。
【0011】
請求項4に係る発明は、請求項3に記載の搬送計量装置であって、前記接合部は、フィンガージョイント方式の接合部であり、大局視において前記搬送ベルトの幅方向に対して傾斜していることを特徴とする。
【0012】
請求項5に係る発明は、請求項1または請求項2に記載の搬送計量装置であって、前記接合部は、フィンガージョイント方式の接合部であり、大局視において更に曲折していることを特徴とする。
【0013】
請求項6に係る発明は、被計量物を搬送しつつ当該被計量物の重量を計測する搬送計量装置であって、無端状の搬送ベルトを回動させることにより前記搬送ベルト上の被計量物を搬送する搬送部と、前記搬送ベルト上において搬送される被計量物の重量を計測する計量部と、を備え、前記搬送ベルトは、前記搬送ベルトの幅方向に対して傾斜した接合部を有することを特徴とする。
【0014】
請求項7に係る発明は、請求項6に記載の搬送計量装置であって、前記接合部は、フィンガージョイント方式の接合部であり、大局視において前記搬送ベルトの幅方向に対して傾斜していることを特徴とする。
【0015】
請求項8に係る発明は、被計量物を搬送しつつ当該被計量物の重量を計測する搬送計量装置であって、無端状の搬送ベルトを回動させることにより前記搬送ベルト上の被計量物を搬送する搬送部と、前記搬送ベルト上において搬送される被計量物の重量を計測する計量部と、を備え、前記搬送ベルトは、フィンガージョイント方式であるとともに大局視において更に曲折した接合部を有することを特徴とする。
【発明の効果】
【0016】
請求項1〜請求項4に記載の発明によれば、搬送部において複数の接合部のうちのある1つの接合部が上下方向の一方に移動するときには、複数の接合部のうちの他の1つの接合部が上下方向の他方に移動するように、搬送ベルト上の複数の接合部の位置が定められている。このため、接合部の上下移動に伴う搬送部の振動を相殺し、計量誤差を防止することができる。
【0017】
特に、請求項2に記載の発明によれば、搬送ベルトは、水平に配置された一対のローラの間に掛け渡されているとともに、互いに対蹠位置に設けられた2つの接合部を有する。このため、一対のローラにおいて2つの接合部を互いに上下方向の逆向きに移動させることができる。したがって、接合部の上下移動に伴う搬送部の振動を良好に相殺することができる。
【0018】
特に、請求項3に記載の発明によれば、接合部は、搬送ベルトの幅方向に対して傾斜している。すなわち、接合部の質量は搬送ベルトの進行方向に分散されている。このため、接合部の上下移動に伴う搬送部の振動を更に抑制し、計量誤差を防止することができる。
【0019】
特に、請求項4に記載の発明によれば、接合部は、フィンガージョイント方式の接合部であり、大局視において搬送ベルトの幅方向に対して傾斜している。このため、接合部の強度を確保しつつ、接合部の上下移動に伴う搬送部の振動を抑制することができる。
【0020】
特に、請求項5に記載の発明によれば、接合部は、フィンガージョイント方式の接合部であり、大局視において更に曲折している。このため、接合部の強度を確保しつつ、接合部の質量を搬送ベルトの進行方向に分散させることにより接合部の上下移動に伴う搬送部の振動を更に抑制することができる。
【0021】
また、請求項6,7に記載の発明によれば、搬送ベルトは、搬送ベルトの幅方向に対して傾斜した接合部を有する。すなわち、接合部の質量は搬送ベルトの進行方向に分散されている。このため、接合部の上下移動に伴う搬送部の振動を抑制し、計量誤差を防止することができる。
【0022】
特に、請求項7に記載の発明によれば、接合部は、フィンガージョイント方式の接合部であり、大局視において搬送ベルトの幅方向に対して傾斜している。このため、接合部の強度を確保しつつ、接合部の上下移動に伴う搬送部の振動を抑制することができる。
【0023】
また、請求項8に記載の発明によれば、搬送ベルトは、フィンガージョイント方式であるとともに大局視において更に曲折した接合部を有する。このため、接合部の強度を確保しつつ、接合部の質量を搬送ベルトの進行方向に分散させることにより接合部の上下移動に伴う搬送部の振動を抑制することができる。
【発明を実施するための最良の形態】
【0024】
以下、図面を参照しつつ本発明の実施形態について説明する。
【0025】
<1.重量チェッカの全体構成>
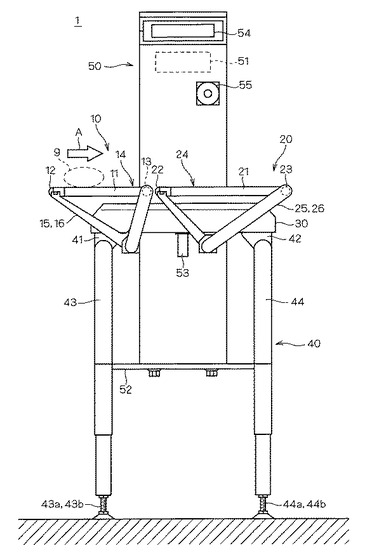
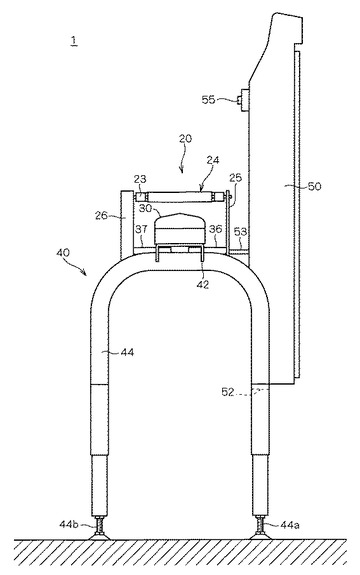
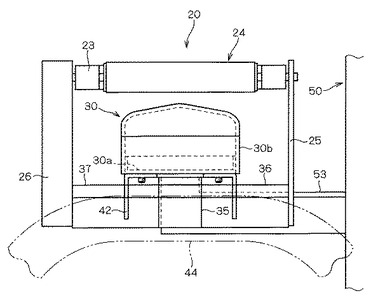
図1および図2は、本発明の搬送計量装置の一実施形態に相当する重量チェッカ1の正面図および側面図である。この重量チェッカ1は、工場内の生産ラインにおいて上流側から供給される被計量物9を下流側へ搬送しつつ、当該被計量物9の重量を計測するための装置である。図1および図2に示したように、重量チェッカ1は、主として、取り込みコンベア10と、計量コンベア20と、本体ボックス30と、脚部40と、電装ボックス50とを備えている。
【0026】
取り込みコンベア10は、上流側から供給される被計量物9を受け入れるとともに、当該被計量物9を計量コンベア20へ搬送するための搬送部である。取り込みコンベア10は、コンベアフレーム11の搬送方向上流側および下流側にそれぞれ回転可能に取り付けられた一対のローラ12,13と、これらのローラ12,13の間に掛け渡された無端状の搬送ベルト14とを有している。コンベアフレーム11は、搬送方向の左右に配置されたV字状アーム15,16によって支持されており、V字状アーム15,16の下端部は本体ボックス30に接続されている。後述する駆動モータを動作させると、一対のローラ12,13の一方が主動回転するとともに他方が従動回転する。これにより、ローラ12,13に掛け渡された搬送ベルト14が回動し、搬送ベルト14上の被計量物9が図中矢印Aの方向に搬送される。取り込みコンベア10は、所定の速度で被計量物9を搬送することにより、計量コンベア20に対する被計量物9の供給間隔を調節する役割を果たす。
【0027】
計量コンベア20は、取り込みコンベア10により搬送された被計量物9を更に下流側へ搬送するとともに、計量台としての機能を有する搬送部である。計量コンベア20は、コンベアフレーム21の搬送方向上流側および下流側にそれぞれ回転可能に取り付けられた一対のローラ22,23と、これらのローラ22,23の間に掛け渡された無端状の搬送ベルト24とを有している。一対のローラ22,23は、搬送方向の左右に配置されたV字状アーム25,26によって支持されており、V字状アーム25,26の下端部は本体ボックス30に接続されている。後述する駆動モータ31を動作させると、一対のローラ22,23の一方が主動回転するとともに他方が従動回転する。これにより、ローラ22,23に掛け渡された搬送ベルト24が回動し、搬送ベルト24上の被計量物9が図中矢印Aの方向に搬送される。計量コンベア20は、搬送ベルト24上において被計量物9を搬送しつつ、V字状アーム25,26を介して本体ボックス30内の後述するロードセル32に被計量物9の重量を伝達する。
【0028】
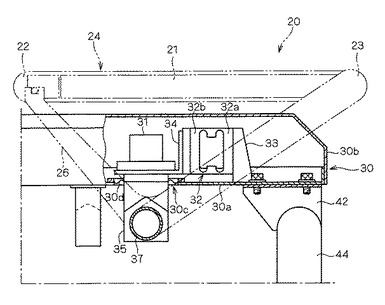
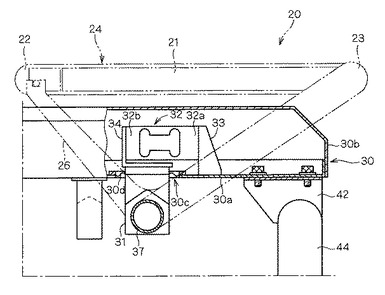
本体ボックス30は、取り込みコンベア10用の駆動モータ、計量コンベア20用の駆動モータ31、および重量を検知するためのロードセル32を内部に収容した筐体である。図3は、計量コンベア20の下方付近における本体ボックス30の一部を切り欠いて示した部分拡大正面図である。また、図4は、本体ボックス30付近の拡大側面図である。図3および図4に示したように、本体ボックス30は、上部が開放された箱状の下部材30aと、下部が開放された箱状の上部材30bとを組み合わせ、全体として搬送方向に長い密閉された筐体となっている。
【0029】
計量コンベア20の下方位置の本体ボックス30の内部には、支持部材33が立設されており、当該支持部材33には、いわゆるロバーバル機構を備えた起歪体であるロードセル32の固定端部32aが接続されている。また、ロードセル32の自由端部32bには正面視において略L字形状のブラケット34が取り付けられ、ブラケット34の上面には計量コンベア20用の駆動モータ31が設置されている。また、ブラケット34の下面側には、駆動モータ31からのびる駆動軸を覆う筒状フレーム35が取り付けられている。
【0030】
筒状フレーム35は、本体ボックス30の底面に形成された開口30cを介して本体ボックス30の下方位置までのび、開口30cの縁部と筒状フレーム35との間はダイヤフラム30dにより封止されている。そして、筒状フレーム35の下端部は、中継部材36,37を介して上記のV字状アーム25,26と接続されている。このため、被計量物9から計量コンベア20に与えられた荷重は、V字状アーム25,26、中継部材36,37、筒状フレーム35、およびブラケット34を介してロードセル32の自由端部32bに伝達される。また、駆動モータ31において発生する動力は、筒状フレーム35内の駆動軸と、中継部材36,37およびV字状アーム25,26に沿って設けられた動力伝達機構(図示省略)とを介して一対のローラ22,23の一方へ伝達され、当該ローラを主動回転させる。
【0031】
一方、取り込みコンベア10の下方位置においては、本体ボックス30の下部材30aの上面に取り込みコンベア10用の駆動モータ(図示省略)が直接設置されている。また、当該駆動モータの下部には上記の筒状フレーム35と同等の筒状フレームが取り付けられ、筒状フレームの下端部は、中継部材を介してV字状アーム15,16に接続されている。駆動モータにおいて発生した動力は、筒状フレーム内の駆動軸と、中継部材およびV字状アーム15,16に沿って設けられた動力伝達機構とを介して一対のローラ12,13の一方へ伝達され、当該ローラを主動回転させる。
【0032】
脚部40は、床面上方の所定の高さ位置に本体ボックス30を水平に支持するための支持部である。脚部40は、本体ボックス30の上流側および下流側の端部にそれぞれブラケット41,42を介して固定された一対のU字パイプ43,44を有している。この重量チェッカ1は、これらのU字パイプ43,44からのびる合計4本の脚によって工場の床面上に支持される。U字パイプ43,44の4本の脚には、それぞれの下端部の高さを調節する調節機構43a,43b,44a,44bが設けられている。脚部40は、これらの調節機構43a,43b,44a,44bを調節することにより、本体ボックス30の高さ位置および水平状態を調整することができる。
【0033】
電装ボックス50は、重量チェッカ1の各部の動作を制御するための制御部(コンピュータ装置あるいは電子回路)51を収容した筐体である。電装ボックス50は、一対のU字パイプ43,44の間に架設された支持プレート52の上部に固定支持されている。電装ボックス50内の制御部51は、本体ボックス30内の2つの駆動モータやロードセル32と電気的に接続され、各駆動モータの動作を制御するとともにロードセル32からの計測信号を受信する。電装ボックス50の前面と本体ボックス39の背面との間には、制御部51と本体ボックス30内の各部との間の電気配線をを覆う配線カバー53が設けられている。また、電装ボックス50の前面には、制御部51と作業者とのインターフェイスとなる表示パネル54やメインスイッチ55が設けられている。
【0034】
このような重量チェッカ1を動作させるときには、まず、メインスイッチ55を押下することにより制御部51を立ち上げ、制御部51からの指令によって取り込みコンベア10用の駆動モータと計量コンベア20用の駆動モータ31とを動作させる。そして、上流側から供給される被計量物9を取り込みコンベア10および計量コンベア20により下流側へ搬送しつつ、計量コンベア20上の被計量物9の重量をロードセル32により計測する。ロードセル32の計測値は、電気信号として制御部51へ送信される。
【0035】
<2.搬送ベルトの第1の形態>
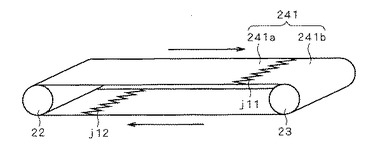
続いて、上記の重量チェッカ1の計量コンベア20に使用される搬送ベルト24の種々の形態について説明する。図5は、一対のローラ22,23の間に掛け渡された第1の形態に係る搬送ベルト24(以下、「搬送ベルト241」とする)の斜視図である。この搬送ベルト241は、2枚の平ベルト241a,241bの端部同士を熱溶着等により接合し、全体として無端状(環状)をなすように構成したものである。したがって、搬送ベルト241上には2つの接合部j11,j12が形成されている。
【0036】
2つの接合部j11,j12はいずれも、折れ線状の凹凸を有する平ベルト241a,241bの端部同士を嵌め合わせて接合した、いわゆるフィンガージョイント方式の接合部である。このため、2枚の平ベルト241a,241bは、接合部j11,j12において強固に接合される。また、フィンガージョイント方式の接合部は、搬送ベルト241の進行方向にある程度の幅を有するため、接合部j11,j12の質量は搬送ベルト241の進行方向に分散される。
【0037】
本形態の搬送ベルト241において、2枚の平ベルト241a,241bの進行方向の長さは等しく、2つの接合部j11,j12は搬送ベルト241上に等間隔に形成されている。すなわち、2つの接合部j11,j12は、搬送ベルト241上において互いに最も遠い位置(対蹠位置)に形成されている。このため、一対のローラ22,23によって搬送ベルト241を回動させると、搬送ベルト241上の2つの接合部j11,j12は、常に逆向きに移動する。
【0038】
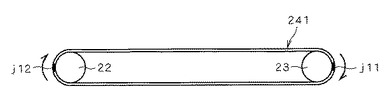
例えば、図6に示したように、一方の接合部j11がローラ23に沿って下方へ移動するときには、他方の接合部j12はローラ22に沿って上方へ移動する。また、同じように、一方の接合部j11がローラ22に沿って上方へ移動するときには、他方の接合部j12はローラ23に沿って下方へ移動する。このように、本形態では、2つの接合部j11,j12が互いに上下方向の逆向きに移動するようになっているため、上下方向に関する質量の移動は、搬送ベルト241全体として相殺される。したがって、接合部j11,j12の上下移動に伴う計量コンベア20の振動は抑制され、それにより計量誤差を防止することができる。
【0039】
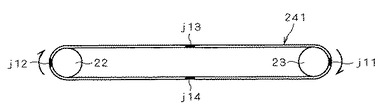
なお、上記の例では、搬送ベルト241上に2つの接合部j11,j12が形成されていたが、例えば、図7に示したように、搬送ベルト241上に等間隔に4つの接合部j11,j12,j13,j14が形成されていてもよい。このような形態であっても、接合部j11と接合部j12との間で質量の上下移動を相殺することができるとともに、接合部j13と接合部j14との間で質量の上下移動を相殺することができる。すなわち、2本のローラによって搬送ベルトを回動させる場合には、搬送ベルト上に偶数個の接合部を等間隔に形成すれば、接合部同士で質量の上下移動を相殺する効果を得ることができる。
【0040】
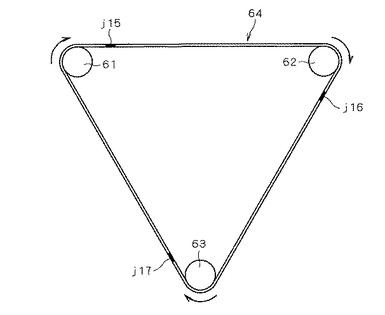
また、他の変形例として、図8に示したように、正三角形の各頂点に相当する位置に配置された3本のローラ61,62,63の間に無端状の搬送ベルト64を掛け渡し、搬送ベルト64上に等間隔に3つの接合部j15,j16,j17を形成するようにしてもよい。このような形態であっても、3つの接合部j15,j16,j17のうちの1つの接合部が下方へ向けて移動するときには他の1つの接合部が上方へ向けて移動する。したがって、接合部同士で質量の上下移動を相殺する効果を得ることができる。すなわち、ローラの数に関わらず、1つの接合部が上下方向の一方に移動するときに他の1つの接合部が上下方向の他方に移動するように、搬送ベルト上の複数の接合部の位置が定められていればよい。
【0041】
<3.搬送ベルトの第2の形態>
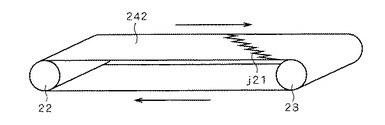
図9は、一対のローラ22,23の間に掛け渡された第2の形態に係る搬送ベルト24(以下、「搬送ベルト242」とする)の斜視図である。この搬送ベルト242は、1枚の平ベルトの両端部を熱溶着等により接合し、全体として無端状(環状)をなすように構成したものである。したがって、搬送ベルト242上には1つの接合部j21が形成されている。
【0042】
接合部j21は、折れ線状の凹凸を有する平ベルトの両端部を嵌め合わせて接合した、いわゆるフィンガージョイント方式の接合部である。このため、接合部j21において平ベルトの両端部は強固に接合される。また、図9に示したように、接合部j21は、全体として搬送ベルト242の幅方向から傾斜した方向にのびている。すなわち、接合部j21は、フィンガージョイント方式の曲折形状を有しているものの、大局的に見れば搬送ベルト242の幅方向に対して傾斜した一方向にのびる接合領域を有している。
【0043】
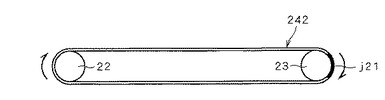
このため、接合部j21の質量は、搬送ベルト242の進行方向の1箇所に集中することはなく、分散される。したがって、例えば、図10に示したように、接合部j21がローラ23に沿って下方へ移動するときには、接合部j21の質量は時間をかけてゆっくりと下方へ移動する。また、同じように、接合部j21がローラ22に沿って上方へ移動するときには、接合部j21の質量は時間をかけてゆっくりと上方へ移動する。このように、本形態では、接合部j21の質量が搬送ベルト242の進行方向に分散されているため、上下方向に関する単位時間当たりの質量の移動量は従来と比べて小さくなる。したがって、接合部j21の上下移動に伴う計量コンベア20の振動は抑制され、それにより計量誤差を防止することができる。
【0044】
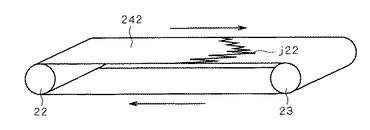
なお、上記の例では、接合部j21は、大局視において一方向にのびたものであったが、例えば、図11に示したように、大局視においてV字状にのびる接合部j22を搬送ベルト242上に形成してもよい。このような形態であっても、接合部j22の質量は、搬送ベルト242の進行方向に分散されているため、上下方向に関する単位時間当たりの質量の移動量を従来と比べて小さくすることができる。接合部j22の形状はV字状に限らず、大局視においてU字状や波状であってもよい。すなわち、搬送ベルト242上の接合部を大局視において傾斜あるいは曲折するように形成すれば、単位時間当たりの質量の上下移動量を小さくする効果を得ることができる。但し、上記の接合部j21のように一方向にのびている方が、質量の分散効率が良く、接合処理も容易であるため、望ましい。
【0045】
<4.搬送ベルトの第3の形態>
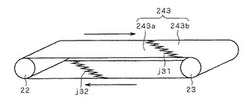
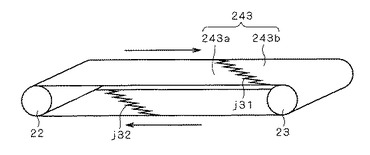
図12は、一対のローラ22,23の間に掛け渡された第3の形態に係る搬送ベルト24(以下、「搬送ベルト243」とする)の斜視図である。この搬送ベルト243は、第1の形態の搬送ベルト241と第2の形態の搬送ベルト242との双方の特徴を兼ね備えたものである。搬送ベルト243は、2枚の平ベルト243a,243bの端部同士を熱溶着等により接合し、全体として無端状(環状)をなすように構成されている。したがって、搬送ベルト243上には2つの接合部j31,j32が形成されている。
【0046】
2つの接合部j31,j32はいずれも、折れ線状の凹凸を有する平ベルト243a,243bの端部同士を嵌め合わせて接合した、いわゆるフィンガージョイント方式の接合部である。このため、2枚の平ベルト243a,243bは、接合部j31,j32において強固に接合される。また、図12に示したように、各接合部j31,j32は、全体として搬送ベルト243の幅方向から傾斜した方向にのびている。すなわち、各接合部j31,j32は、フィンガージョイント方式の曲折形状を有しているものの、大局的に見れば搬送ベルト243の幅方向に対して傾斜した一方向にのびる接合領域を有している。
【0047】
このため、接合部j31,j32の質量は、搬送ベルト243の進行方向の1箇所に集中することはなく、分散されている。したがって、例えば、図13に示したように、接合部j31がローラ23に沿って下方へ移動し、接合部j32がローラ22に沿って上方へ移動するときには、接合部j31,j32は、それぞれ時間を掛けてゆっくりと下方および上方へ移動する。また、同じように、接合部j31がローラ22に沿って上方へ移動し、接合部j32がローラ23に沿って下方へ移動するときにも、接合部j31,j32は、それぞれ時間を掛けてゆっくりと上方および下方へ移動する。このように、本形態では、接合部j31,j32の質量が搬送ベルト243の進行方向に分散されているため、上下方向に関する単位時間当たりの質量の移動量は従来と比べて小さくなる。したがって、接合部j31,j32の上下移動に伴う計量コンベア20の振動は抑制され、それにより計量誤差を防止することができる。
【0048】
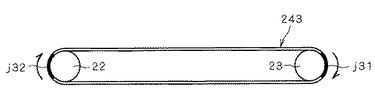
また、本形態の搬送ベルト243において、2枚の平ベルト243a,243bの進行方向の長さは等しく、2つの接合部j31,j32は搬送ベルト243上に等間隔に形成されている。すなわち、2つの接合部j31,j32は、搬送ベルト243上において互いに最も遠い位置(対蹠位置)に形成されている。このため、一対のローラ22,23によって搬送ベルト243を回動させると、搬送ベルト243上の2つの接合部j31,j32は、常に逆向きに移動する。
【0049】
例えば、図13に示したように、一方の接合部j31がローラ23に沿って下方へ移動するときには、他方の接合部j32はローラ22に沿って上方へ移動する。また、同じように、一方の接合部j31がローラ22に沿って上方へ移動するときには、他方の接合部j32はローラ23に沿って下方へ移動する。このように、本形態では、2つの接合部j31,j32が互いに上下方向の逆向きに移動するようになっているため、上下方向に関する質量の移動は、搬送ベルト243全体として相殺される。したがって、接合部j31,j32の上下移動に伴う計量コンベア20の振動は抑制され、それにより計量誤差を防止することができる。
【0050】
なお、上記の例では、接合部j31,j32は、大局視において一方向にのびたものであったが、接合部j31,j32の形状は、大局視においてV字状、U字状、波状などであってもよい。すなわち、搬送ベルト243上の接合部を大局視において傾斜あるいは曲折するように形成すれば、単位時間当たりの質量の上下移動量を小さくする効果を得ることができる。但し、上記の接合部j31,j32のように一方向にのびている方が、質量の分散効率が良く、接合処理も容易であるため、望ましい。
【0051】
また、上記の例では、搬送ベルト243上に2つの接合部j31,j32が形成されていたが、接合部j31,j32の数は必ずしも2つでなくてもよい。2本のローラによって搬送ベルトを回動させる場合には、搬送ベルト上に偶数個の接合部を等間隔に形成すれば、接合部同士で質量の上下移動を相殺する効果を得ることができる。また、ローラの数も必ずしも2本でなくてもよい。ローラの数に関わらず、1つの接合部が上下方向の一方に移動するときに他の1つの接合部が上下方向の他方に移動するように、搬送ベルト上の複数の接合部の位置が定められていればよい。
【0052】
<5.他の変形例>
上記の第1〜第3の形態では、接合部j11,j12,j13,j14,j15,j16,j17,j21,j22,j31,j32は全てフィンガージョイント方式の接合部であったが、本発明の接合部は、フィンガージョイント方式以外の接合部であってもよい。また、本発明の接合部は、熱溶着以外の接合方法によって接合されたものであってもよい。
【0053】
搬送ベルト24は、例えば、ポリウレタンなどの清掃性に優れた材料を使用して構成すればよいが、本発明の搬送ベルトはこれに限らず、種々のベルト材料を使用して構成することができる。また、被計量物9の付着を防止するために、搬送ベルトの表面にエンボス加工やコーティングなどの処理が施されていてもよい。また、本発明の搬送ベルトは、厚みの大きい搬送ベルトにも適用することができ、厚みの大きい搬送ベルトを使用した場合に発生し易い計量コンベア20の振動を抑制することができる。
【0054】
また、本発明における搬送部および計量部の構成は、上記図3に示した計量コンベア20および本体ボックス30の内部の構成に限定されるものではない。例えば、図14に示したように、計量コンベア20用の駆動モータ31がロードセル32の下方に配置された構成であってもよい。図14の例では、ロードセル32の自由端部32bにブラケット34を介して駆動モータ31が吊下固定されている。また、駆動モータ31は、中継部材36,37を介してV字状アーム25,26に接続されている。駆動モータ31において発生する動力は、中継部材36,37およびV字状アーム25,26に沿って設けられた動力伝達機構(図示省略)を介して一対のローラ22,23の一方へ伝達され、当該ローラを主動回転させる。
【0055】
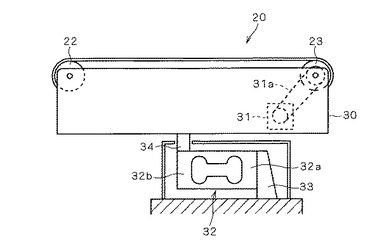
また、図15に示したように、ロードセル32の上方に駆動モータ31および計量コンベア20が配置された構成であってもよい。図15の例では、本体ボックス30の内部に配置された駆動モータ31が、駆動ベルト31aを介してローラ23の駆動軸に連結されている。このため、駆動モータ31において発生する動力は、駆動ベルト31aを介してローラ23へ伝達され、ローラ23を主動回転させる。また、計量コンベア20および本体ボックス30の全体が、ブラケット34を介してロードセル32の自由端部32b上に支持されている。
【図面の簡単な説明】
【0056】
【図1】重量チェッカの正面図である。
【図2】重量チェッカの側面図である。
【図3】本体ボックスの一部を切り欠いて示した部分拡大正面図である。
【図4】本体ボックス付近の拡大側面図である。
【図5】第1の形態に係る搬送ベルトの斜視図である。
【図6】第1の形態に係る搬送ベルトを搬送方向右手側から見た図である。
【図7】第1の形態の変形例に係る搬送ベルトを搬送方向右手側から見た図である。
【図8】第1の形態の変形例に係る搬送ベルトを搬送方向右手側から見た図である。
【図9】第2の形態に係る搬送ベルトの斜視図である。
【図10】第2の形態に係る搬送ベルトを搬送方向右手側から見た図である。
【図11】第2の形態の変形例に係る搬送ベルトの斜視図である。
【図12】第3の形態に係る搬送ベルトの斜視図である。
【図13】第3の形態に係る搬送ベルトを搬送方向右手側から見た図である。
【図14】変形例に係る搬送部および計量部の構成を示した図である。
【図15】変形例に係る搬送部および計量部の構成を示した図である。
【符号の説明】
【0057】
1 重量チェッカ
10 取り込みコンベア
20 計量コンベア
21 コンベアフレーム
22,23,61,62,63 ローラ
24,241,242,243,64 搬送ベルト
30 本体ボックス
31 駆動モータ
32 ロードセル
40 脚部
50 電装ボックス
9 被計量物
j11,j12,j13,j14,j15,j16,j17,j21,j22,j31,j32 接合部
【技術分野】
【0001】
本発明は、被計量物を搬送しつつ当該被計量物の重量を計測する搬送計量装置に関する。
【背景技術】
【0002】
菓子、生鮮食品、飲料品、薬品等の生産ラインにおいては、これらの商品を搬送しつつ当該商品の重量を計測する搬送計量装置が使用されている。搬送計量装置は、主として、商品を搬送するコンベアと、コンベアに接続されたロードセルとを備え、コンベア上において搬送される商品の重量をロードセルにより計測する装置である。搬送計量装置のコンベアは、水平に配置された一対のローラの間に無端状(環状)の搬送ベルトが掛け渡された構成を有し、ローラを回転させることにより搬送ベルトを回動させて搬送ベルト上の商品を搬送する。
【0003】
このような従来の搬送計量装置の構成は、例えば、特許文献1,2に開示されている。
【0004】
【特許文献1】特許第3463827号公報
【特許文献2】特開2002−116079号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
上記の搬送計量装置では、1枚の平ベルトの端部同士を接合することにより無端状とした搬送ベルトが使用されている。このため、搬送ベルト上には接合部が存在し、当該接合部と搬送ベルトの他の部分とでは質量分布が相違する。したがって、接合部がローラに沿って下降または上昇したときには、接合部の質量が上下方向に移動することによってコンベアに微小な振動が生じ、これによりロードセルにおいて測定される計量値に誤差が生じる恐れがあった。
【0006】
このような計量値の誤差は、近年実用化が進んでいるシームレス(接合部のない)タイプの搬送ベルトを使用すれば防止することができる。しかしながら、シームレスタイプの搬送ベルトは接合部を有する搬送ベルトに比べて高価であるため、シームレスタイプの搬送ベルトを使用すると搬送計量装置全体の製造コストを増大させてしまうという問題があった。また、上記の計量誤差は、搬送ベルトの厚みを小さくすれば低減することができる。しかしながら、厚みの小さい搬送ベルトを使用すると、重量の大きな商品や硬度の高い商品に対応出来なくなるという問題があった。
【0007】
本発明は、このような事情に鑑みなされたものであり、シームレスタイプの搬送ベルトを使用することなく、また、搬送ベルトの厚みを小さくすることもなく、接合部の上下移動に起因する搬送部の振動を抑制し、それにより計量誤差を抑制することができる搬送計量装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するため、請求項1に係る発明は、被計量物を搬送しつつ当該被計量物の重量を計測する搬送計量装置であって、無端状の搬送ベルトを回動させることにより前記搬送ベルト上の被計量物を搬送する搬送部と、前記搬送ベルト上において搬送される被計量物の重量を計測する計量部と、を備え、前記搬送ベルトは複数の接合部を有し、前記搬送部において前記複数の接合部のうちのある1つの接合部が上下方向の一方に移動するときには、前記複数の接合部のうちの他の1つの接合部が上下方向の他方に移動するように、前記複数の接合部の位置が定められていることを特徴とする。
【0009】
請求項2に係る発明は、請求項1に記載の搬送計量装置であって、前記搬送ベルトは、水平に配置された一対のローラの間に掛け渡されているとともに、互いに対蹠位置に設けられた2つの接合部を有することを特徴とする。
【0010】
請求項3に係る発明は、請求項1または請求項2に記載の搬送計量装置であって、前記接合部は、前記搬送ベルトの幅方向に対して傾斜していることを特徴とする。
【0011】
請求項4に係る発明は、請求項3に記載の搬送計量装置であって、前記接合部は、フィンガージョイント方式の接合部であり、大局視において前記搬送ベルトの幅方向に対して傾斜していることを特徴とする。
【0012】
請求項5に係る発明は、請求項1または請求項2に記載の搬送計量装置であって、前記接合部は、フィンガージョイント方式の接合部であり、大局視において更に曲折していることを特徴とする。
【0013】
請求項6に係る発明は、被計量物を搬送しつつ当該被計量物の重量を計測する搬送計量装置であって、無端状の搬送ベルトを回動させることにより前記搬送ベルト上の被計量物を搬送する搬送部と、前記搬送ベルト上において搬送される被計量物の重量を計測する計量部と、を備え、前記搬送ベルトは、前記搬送ベルトの幅方向に対して傾斜した接合部を有することを特徴とする。
【0014】
請求項7に係る発明は、請求項6に記載の搬送計量装置であって、前記接合部は、フィンガージョイント方式の接合部であり、大局視において前記搬送ベルトの幅方向に対して傾斜していることを特徴とする。
【0015】
請求項8に係る発明は、被計量物を搬送しつつ当該被計量物の重量を計測する搬送計量装置であって、無端状の搬送ベルトを回動させることにより前記搬送ベルト上の被計量物を搬送する搬送部と、前記搬送ベルト上において搬送される被計量物の重量を計測する計量部と、を備え、前記搬送ベルトは、フィンガージョイント方式であるとともに大局視において更に曲折した接合部を有することを特徴とする。
【発明の効果】
【0016】
請求項1〜請求項4に記載の発明によれば、搬送部において複数の接合部のうちのある1つの接合部が上下方向の一方に移動するときには、複数の接合部のうちの他の1つの接合部が上下方向の他方に移動するように、搬送ベルト上の複数の接合部の位置が定められている。このため、接合部の上下移動に伴う搬送部の振動を相殺し、計量誤差を防止することができる。
【0017】
特に、請求項2に記載の発明によれば、搬送ベルトは、水平に配置された一対のローラの間に掛け渡されているとともに、互いに対蹠位置に設けられた2つの接合部を有する。このため、一対のローラにおいて2つの接合部を互いに上下方向の逆向きに移動させることができる。したがって、接合部の上下移動に伴う搬送部の振動を良好に相殺することができる。
【0018】
特に、請求項3に記載の発明によれば、接合部は、搬送ベルトの幅方向に対して傾斜している。すなわち、接合部の質量は搬送ベルトの進行方向に分散されている。このため、接合部の上下移動に伴う搬送部の振動を更に抑制し、計量誤差を防止することができる。
【0019】
特に、請求項4に記載の発明によれば、接合部は、フィンガージョイント方式の接合部であり、大局視において搬送ベルトの幅方向に対して傾斜している。このため、接合部の強度を確保しつつ、接合部の上下移動に伴う搬送部の振動を抑制することができる。
【0020】
特に、請求項5に記載の発明によれば、接合部は、フィンガージョイント方式の接合部であり、大局視において更に曲折している。このため、接合部の強度を確保しつつ、接合部の質量を搬送ベルトの進行方向に分散させることにより接合部の上下移動に伴う搬送部の振動を更に抑制することができる。
【0021】
また、請求項6,7に記載の発明によれば、搬送ベルトは、搬送ベルトの幅方向に対して傾斜した接合部を有する。すなわち、接合部の質量は搬送ベルトの進行方向に分散されている。このため、接合部の上下移動に伴う搬送部の振動を抑制し、計量誤差を防止することができる。
【0022】
特に、請求項7に記載の発明によれば、接合部は、フィンガージョイント方式の接合部であり、大局視において搬送ベルトの幅方向に対して傾斜している。このため、接合部の強度を確保しつつ、接合部の上下移動に伴う搬送部の振動を抑制することができる。
【0023】
また、請求項8に記載の発明によれば、搬送ベルトは、フィンガージョイント方式であるとともに大局視において更に曲折した接合部を有する。このため、接合部の強度を確保しつつ、接合部の質量を搬送ベルトの進行方向に分散させることにより接合部の上下移動に伴う搬送部の振動を抑制することができる。
【発明を実施するための最良の形態】
【0024】
以下、図面を参照しつつ本発明の実施形態について説明する。
【0025】
<1.重量チェッカの全体構成>
図1および図2は、本発明の搬送計量装置の一実施形態に相当する重量チェッカ1の正面図および側面図である。この重量チェッカ1は、工場内の生産ラインにおいて上流側から供給される被計量物9を下流側へ搬送しつつ、当該被計量物9の重量を計測するための装置である。図1および図2に示したように、重量チェッカ1は、主として、取り込みコンベア10と、計量コンベア20と、本体ボックス30と、脚部40と、電装ボックス50とを備えている。
【0026】
取り込みコンベア10は、上流側から供給される被計量物9を受け入れるとともに、当該被計量物9を計量コンベア20へ搬送するための搬送部である。取り込みコンベア10は、コンベアフレーム11の搬送方向上流側および下流側にそれぞれ回転可能に取り付けられた一対のローラ12,13と、これらのローラ12,13の間に掛け渡された無端状の搬送ベルト14とを有している。コンベアフレーム11は、搬送方向の左右に配置されたV字状アーム15,16によって支持されており、V字状アーム15,16の下端部は本体ボックス30に接続されている。後述する駆動モータを動作させると、一対のローラ12,13の一方が主動回転するとともに他方が従動回転する。これにより、ローラ12,13に掛け渡された搬送ベルト14が回動し、搬送ベルト14上の被計量物9が図中矢印Aの方向に搬送される。取り込みコンベア10は、所定の速度で被計量物9を搬送することにより、計量コンベア20に対する被計量物9の供給間隔を調節する役割を果たす。
【0027】
計量コンベア20は、取り込みコンベア10により搬送された被計量物9を更に下流側へ搬送するとともに、計量台としての機能を有する搬送部である。計量コンベア20は、コンベアフレーム21の搬送方向上流側および下流側にそれぞれ回転可能に取り付けられた一対のローラ22,23と、これらのローラ22,23の間に掛け渡された無端状の搬送ベルト24とを有している。一対のローラ22,23は、搬送方向の左右に配置されたV字状アーム25,26によって支持されており、V字状アーム25,26の下端部は本体ボックス30に接続されている。後述する駆動モータ31を動作させると、一対のローラ22,23の一方が主動回転するとともに他方が従動回転する。これにより、ローラ22,23に掛け渡された搬送ベルト24が回動し、搬送ベルト24上の被計量物9が図中矢印Aの方向に搬送される。計量コンベア20は、搬送ベルト24上において被計量物9を搬送しつつ、V字状アーム25,26を介して本体ボックス30内の後述するロードセル32に被計量物9の重量を伝達する。
【0028】
本体ボックス30は、取り込みコンベア10用の駆動モータ、計量コンベア20用の駆動モータ31、および重量を検知するためのロードセル32を内部に収容した筐体である。図3は、計量コンベア20の下方付近における本体ボックス30の一部を切り欠いて示した部分拡大正面図である。また、図4は、本体ボックス30付近の拡大側面図である。図3および図4に示したように、本体ボックス30は、上部が開放された箱状の下部材30aと、下部が開放された箱状の上部材30bとを組み合わせ、全体として搬送方向に長い密閉された筐体となっている。
【0029】
計量コンベア20の下方位置の本体ボックス30の内部には、支持部材33が立設されており、当該支持部材33には、いわゆるロバーバル機構を備えた起歪体であるロードセル32の固定端部32aが接続されている。また、ロードセル32の自由端部32bには正面視において略L字形状のブラケット34が取り付けられ、ブラケット34の上面には計量コンベア20用の駆動モータ31が設置されている。また、ブラケット34の下面側には、駆動モータ31からのびる駆動軸を覆う筒状フレーム35が取り付けられている。
【0030】
筒状フレーム35は、本体ボックス30の底面に形成された開口30cを介して本体ボックス30の下方位置までのび、開口30cの縁部と筒状フレーム35との間はダイヤフラム30dにより封止されている。そして、筒状フレーム35の下端部は、中継部材36,37を介して上記のV字状アーム25,26と接続されている。このため、被計量物9から計量コンベア20に与えられた荷重は、V字状アーム25,26、中継部材36,37、筒状フレーム35、およびブラケット34を介してロードセル32の自由端部32bに伝達される。また、駆動モータ31において発生する動力は、筒状フレーム35内の駆動軸と、中継部材36,37およびV字状アーム25,26に沿って設けられた動力伝達機構(図示省略)とを介して一対のローラ22,23の一方へ伝達され、当該ローラを主動回転させる。
【0031】
一方、取り込みコンベア10の下方位置においては、本体ボックス30の下部材30aの上面に取り込みコンベア10用の駆動モータ(図示省略)が直接設置されている。また、当該駆動モータの下部には上記の筒状フレーム35と同等の筒状フレームが取り付けられ、筒状フレームの下端部は、中継部材を介してV字状アーム15,16に接続されている。駆動モータにおいて発生した動力は、筒状フレーム内の駆動軸と、中継部材およびV字状アーム15,16に沿って設けられた動力伝達機構とを介して一対のローラ12,13の一方へ伝達され、当該ローラを主動回転させる。
【0032】
脚部40は、床面上方の所定の高さ位置に本体ボックス30を水平に支持するための支持部である。脚部40は、本体ボックス30の上流側および下流側の端部にそれぞれブラケット41,42を介して固定された一対のU字パイプ43,44を有している。この重量チェッカ1は、これらのU字パイプ43,44からのびる合計4本の脚によって工場の床面上に支持される。U字パイプ43,44の4本の脚には、それぞれの下端部の高さを調節する調節機構43a,43b,44a,44bが設けられている。脚部40は、これらの調節機構43a,43b,44a,44bを調節することにより、本体ボックス30の高さ位置および水平状態を調整することができる。
【0033】
電装ボックス50は、重量チェッカ1の各部の動作を制御するための制御部(コンピュータ装置あるいは電子回路)51を収容した筐体である。電装ボックス50は、一対のU字パイプ43,44の間に架設された支持プレート52の上部に固定支持されている。電装ボックス50内の制御部51は、本体ボックス30内の2つの駆動モータやロードセル32と電気的に接続され、各駆動モータの動作を制御するとともにロードセル32からの計測信号を受信する。電装ボックス50の前面と本体ボックス39の背面との間には、制御部51と本体ボックス30内の各部との間の電気配線をを覆う配線カバー53が設けられている。また、電装ボックス50の前面には、制御部51と作業者とのインターフェイスとなる表示パネル54やメインスイッチ55が設けられている。
【0034】
このような重量チェッカ1を動作させるときには、まず、メインスイッチ55を押下することにより制御部51を立ち上げ、制御部51からの指令によって取り込みコンベア10用の駆動モータと計量コンベア20用の駆動モータ31とを動作させる。そして、上流側から供給される被計量物9を取り込みコンベア10および計量コンベア20により下流側へ搬送しつつ、計量コンベア20上の被計量物9の重量をロードセル32により計測する。ロードセル32の計測値は、電気信号として制御部51へ送信される。
【0035】
<2.搬送ベルトの第1の形態>
続いて、上記の重量チェッカ1の計量コンベア20に使用される搬送ベルト24の種々の形態について説明する。図5は、一対のローラ22,23の間に掛け渡された第1の形態に係る搬送ベルト24(以下、「搬送ベルト241」とする)の斜視図である。この搬送ベルト241は、2枚の平ベルト241a,241bの端部同士を熱溶着等により接合し、全体として無端状(環状)をなすように構成したものである。したがって、搬送ベルト241上には2つの接合部j11,j12が形成されている。
【0036】
2つの接合部j11,j12はいずれも、折れ線状の凹凸を有する平ベルト241a,241bの端部同士を嵌め合わせて接合した、いわゆるフィンガージョイント方式の接合部である。このため、2枚の平ベルト241a,241bは、接合部j11,j12において強固に接合される。また、フィンガージョイント方式の接合部は、搬送ベルト241の進行方向にある程度の幅を有するため、接合部j11,j12の質量は搬送ベルト241の進行方向に分散される。
【0037】
本形態の搬送ベルト241において、2枚の平ベルト241a,241bの進行方向の長さは等しく、2つの接合部j11,j12は搬送ベルト241上に等間隔に形成されている。すなわち、2つの接合部j11,j12は、搬送ベルト241上において互いに最も遠い位置(対蹠位置)に形成されている。このため、一対のローラ22,23によって搬送ベルト241を回動させると、搬送ベルト241上の2つの接合部j11,j12は、常に逆向きに移動する。
【0038】
例えば、図6に示したように、一方の接合部j11がローラ23に沿って下方へ移動するときには、他方の接合部j12はローラ22に沿って上方へ移動する。また、同じように、一方の接合部j11がローラ22に沿って上方へ移動するときには、他方の接合部j12はローラ23に沿って下方へ移動する。このように、本形態では、2つの接合部j11,j12が互いに上下方向の逆向きに移動するようになっているため、上下方向に関する質量の移動は、搬送ベルト241全体として相殺される。したがって、接合部j11,j12の上下移動に伴う計量コンベア20の振動は抑制され、それにより計量誤差を防止することができる。
【0039】
なお、上記の例では、搬送ベルト241上に2つの接合部j11,j12が形成されていたが、例えば、図7に示したように、搬送ベルト241上に等間隔に4つの接合部j11,j12,j13,j14が形成されていてもよい。このような形態であっても、接合部j11と接合部j12との間で質量の上下移動を相殺することができるとともに、接合部j13と接合部j14との間で質量の上下移動を相殺することができる。すなわち、2本のローラによって搬送ベルトを回動させる場合には、搬送ベルト上に偶数個の接合部を等間隔に形成すれば、接合部同士で質量の上下移動を相殺する効果を得ることができる。
【0040】
また、他の変形例として、図8に示したように、正三角形の各頂点に相当する位置に配置された3本のローラ61,62,63の間に無端状の搬送ベルト64を掛け渡し、搬送ベルト64上に等間隔に3つの接合部j15,j16,j17を形成するようにしてもよい。このような形態であっても、3つの接合部j15,j16,j17のうちの1つの接合部が下方へ向けて移動するときには他の1つの接合部が上方へ向けて移動する。したがって、接合部同士で質量の上下移動を相殺する効果を得ることができる。すなわち、ローラの数に関わらず、1つの接合部が上下方向の一方に移動するときに他の1つの接合部が上下方向の他方に移動するように、搬送ベルト上の複数の接合部の位置が定められていればよい。
【0041】
<3.搬送ベルトの第2の形態>
図9は、一対のローラ22,23の間に掛け渡された第2の形態に係る搬送ベルト24(以下、「搬送ベルト242」とする)の斜視図である。この搬送ベルト242は、1枚の平ベルトの両端部を熱溶着等により接合し、全体として無端状(環状)をなすように構成したものである。したがって、搬送ベルト242上には1つの接合部j21が形成されている。
【0042】
接合部j21は、折れ線状の凹凸を有する平ベルトの両端部を嵌め合わせて接合した、いわゆるフィンガージョイント方式の接合部である。このため、接合部j21において平ベルトの両端部は強固に接合される。また、図9に示したように、接合部j21は、全体として搬送ベルト242の幅方向から傾斜した方向にのびている。すなわち、接合部j21は、フィンガージョイント方式の曲折形状を有しているものの、大局的に見れば搬送ベルト242の幅方向に対して傾斜した一方向にのびる接合領域を有している。
【0043】
このため、接合部j21の質量は、搬送ベルト242の進行方向の1箇所に集中することはなく、分散される。したがって、例えば、図10に示したように、接合部j21がローラ23に沿って下方へ移動するときには、接合部j21の質量は時間をかけてゆっくりと下方へ移動する。また、同じように、接合部j21がローラ22に沿って上方へ移動するときには、接合部j21の質量は時間をかけてゆっくりと上方へ移動する。このように、本形態では、接合部j21の質量が搬送ベルト242の進行方向に分散されているため、上下方向に関する単位時間当たりの質量の移動量は従来と比べて小さくなる。したがって、接合部j21の上下移動に伴う計量コンベア20の振動は抑制され、それにより計量誤差を防止することができる。
【0044】
なお、上記の例では、接合部j21は、大局視において一方向にのびたものであったが、例えば、図11に示したように、大局視においてV字状にのびる接合部j22を搬送ベルト242上に形成してもよい。このような形態であっても、接合部j22の質量は、搬送ベルト242の進行方向に分散されているため、上下方向に関する単位時間当たりの質量の移動量を従来と比べて小さくすることができる。接合部j22の形状はV字状に限らず、大局視においてU字状や波状であってもよい。すなわち、搬送ベルト242上の接合部を大局視において傾斜あるいは曲折するように形成すれば、単位時間当たりの質量の上下移動量を小さくする効果を得ることができる。但し、上記の接合部j21のように一方向にのびている方が、質量の分散効率が良く、接合処理も容易であるため、望ましい。
【0045】
<4.搬送ベルトの第3の形態>
図12は、一対のローラ22,23の間に掛け渡された第3の形態に係る搬送ベルト24(以下、「搬送ベルト243」とする)の斜視図である。この搬送ベルト243は、第1の形態の搬送ベルト241と第2の形態の搬送ベルト242との双方の特徴を兼ね備えたものである。搬送ベルト243は、2枚の平ベルト243a,243bの端部同士を熱溶着等により接合し、全体として無端状(環状)をなすように構成されている。したがって、搬送ベルト243上には2つの接合部j31,j32が形成されている。
【0046】
2つの接合部j31,j32はいずれも、折れ線状の凹凸を有する平ベルト243a,243bの端部同士を嵌め合わせて接合した、いわゆるフィンガージョイント方式の接合部である。このため、2枚の平ベルト243a,243bは、接合部j31,j32において強固に接合される。また、図12に示したように、各接合部j31,j32は、全体として搬送ベルト243の幅方向から傾斜した方向にのびている。すなわち、各接合部j31,j32は、フィンガージョイント方式の曲折形状を有しているものの、大局的に見れば搬送ベルト243の幅方向に対して傾斜した一方向にのびる接合領域を有している。
【0047】
このため、接合部j31,j32の質量は、搬送ベルト243の進行方向の1箇所に集中することはなく、分散されている。したがって、例えば、図13に示したように、接合部j31がローラ23に沿って下方へ移動し、接合部j32がローラ22に沿って上方へ移動するときには、接合部j31,j32は、それぞれ時間を掛けてゆっくりと下方および上方へ移動する。また、同じように、接合部j31がローラ22に沿って上方へ移動し、接合部j32がローラ23に沿って下方へ移動するときにも、接合部j31,j32は、それぞれ時間を掛けてゆっくりと上方および下方へ移動する。このように、本形態では、接合部j31,j32の質量が搬送ベルト243の進行方向に分散されているため、上下方向に関する単位時間当たりの質量の移動量は従来と比べて小さくなる。したがって、接合部j31,j32の上下移動に伴う計量コンベア20の振動は抑制され、それにより計量誤差を防止することができる。
【0048】
また、本形態の搬送ベルト243において、2枚の平ベルト243a,243bの進行方向の長さは等しく、2つの接合部j31,j32は搬送ベルト243上に等間隔に形成されている。すなわち、2つの接合部j31,j32は、搬送ベルト243上において互いに最も遠い位置(対蹠位置)に形成されている。このため、一対のローラ22,23によって搬送ベルト243を回動させると、搬送ベルト243上の2つの接合部j31,j32は、常に逆向きに移動する。
【0049】
例えば、図13に示したように、一方の接合部j31がローラ23に沿って下方へ移動するときには、他方の接合部j32はローラ22に沿って上方へ移動する。また、同じように、一方の接合部j31がローラ22に沿って上方へ移動するときには、他方の接合部j32はローラ23に沿って下方へ移動する。このように、本形態では、2つの接合部j31,j32が互いに上下方向の逆向きに移動するようになっているため、上下方向に関する質量の移動は、搬送ベルト243全体として相殺される。したがって、接合部j31,j32の上下移動に伴う計量コンベア20の振動は抑制され、それにより計量誤差を防止することができる。
【0050】
なお、上記の例では、接合部j31,j32は、大局視において一方向にのびたものであったが、接合部j31,j32の形状は、大局視においてV字状、U字状、波状などであってもよい。すなわち、搬送ベルト243上の接合部を大局視において傾斜あるいは曲折するように形成すれば、単位時間当たりの質量の上下移動量を小さくする効果を得ることができる。但し、上記の接合部j31,j32のように一方向にのびている方が、質量の分散効率が良く、接合処理も容易であるため、望ましい。
【0051】
また、上記の例では、搬送ベルト243上に2つの接合部j31,j32が形成されていたが、接合部j31,j32の数は必ずしも2つでなくてもよい。2本のローラによって搬送ベルトを回動させる場合には、搬送ベルト上に偶数個の接合部を等間隔に形成すれば、接合部同士で質量の上下移動を相殺する効果を得ることができる。また、ローラの数も必ずしも2本でなくてもよい。ローラの数に関わらず、1つの接合部が上下方向の一方に移動するときに他の1つの接合部が上下方向の他方に移動するように、搬送ベルト上の複数の接合部の位置が定められていればよい。
【0052】
<5.他の変形例>
上記の第1〜第3の形態では、接合部j11,j12,j13,j14,j15,j16,j17,j21,j22,j31,j32は全てフィンガージョイント方式の接合部であったが、本発明の接合部は、フィンガージョイント方式以外の接合部であってもよい。また、本発明の接合部は、熱溶着以外の接合方法によって接合されたものであってもよい。
【0053】
搬送ベルト24は、例えば、ポリウレタンなどの清掃性に優れた材料を使用して構成すればよいが、本発明の搬送ベルトはこれに限らず、種々のベルト材料を使用して構成することができる。また、被計量物9の付着を防止するために、搬送ベルトの表面にエンボス加工やコーティングなどの処理が施されていてもよい。また、本発明の搬送ベルトは、厚みの大きい搬送ベルトにも適用することができ、厚みの大きい搬送ベルトを使用した場合に発生し易い計量コンベア20の振動を抑制することができる。
【0054】
また、本発明における搬送部および計量部の構成は、上記図3に示した計量コンベア20および本体ボックス30の内部の構成に限定されるものではない。例えば、図14に示したように、計量コンベア20用の駆動モータ31がロードセル32の下方に配置された構成であってもよい。図14の例では、ロードセル32の自由端部32bにブラケット34を介して駆動モータ31が吊下固定されている。また、駆動モータ31は、中継部材36,37を介してV字状アーム25,26に接続されている。駆動モータ31において発生する動力は、中継部材36,37およびV字状アーム25,26に沿って設けられた動力伝達機構(図示省略)を介して一対のローラ22,23の一方へ伝達され、当該ローラを主動回転させる。
【0055】
また、図15に示したように、ロードセル32の上方に駆動モータ31および計量コンベア20が配置された構成であってもよい。図15の例では、本体ボックス30の内部に配置された駆動モータ31が、駆動ベルト31aを介してローラ23の駆動軸に連結されている。このため、駆動モータ31において発生する動力は、駆動ベルト31aを介してローラ23へ伝達され、ローラ23を主動回転させる。また、計量コンベア20および本体ボックス30の全体が、ブラケット34を介してロードセル32の自由端部32b上に支持されている。
【図面の簡単な説明】
【0056】
【図1】重量チェッカの正面図である。
【図2】重量チェッカの側面図である。
【図3】本体ボックスの一部を切り欠いて示した部分拡大正面図である。
【図4】本体ボックス付近の拡大側面図である。
【図5】第1の形態に係る搬送ベルトの斜視図である。
【図6】第1の形態に係る搬送ベルトを搬送方向右手側から見た図である。
【図7】第1の形態の変形例に係る搬送ベルトを搬送方向右手側から見た図である。
【図8】第1の形態の変形例に係る搬送ベルトを搬送方向右手側から見た図である。
【図9】第2の形態に係る搬送ベルトの斜視図である。
【図10】第2の形態に係る搬送ベルトを搬送方向右手側から見た図である。
【図11】第2の形態の変形例に係る搬送ベルトの斜視図である。
【図12】第3の形態に係る搬送ベルトの斜視図である。
【図13】第3の形態に係る搬送ベルトを搬送方向右手側から見た図である。
【図14】変形例に係る搬送部および計量部の構成を示した図である。
【図15】変形例に係る搬送部および計量部の構成を示した図である。
【符号の説明】
【0057】
1 重量チェッカ
10 取り込みコンベア
20 計量コンベア
21 コンベアフレーム
22,23,61,62,63 ローラ
24,241,242,243,64 搬送ベルト
30 本体ボックス
31 駆動モータ
32 ロードセル
40 脚部
50 電装ボックス
9 被計量物
j11,j12,j13,j14,j15,j16,j17,j21,j22,j31,j32 接合部
【特許請求の範囲】
【請求項1】
被計量物を搬送しつつ当該被計量物の重量を計測する搬送計量装置であって、
無端状の搬送ベルトを回動させることにより前記搬送ベルト上の被計量物を搬送する搬送部と、
前記搬送ベルト上において搬送される被計量物の重量を計測する計量部と、
を備え、
前記搬送ベルトは複数の接合部を有し、
前記搬送部において前記複数の接合部のうちのある1つの接合部が上下方向の一方に移動するときには、前記複数の接合部のうちの他の1つの接合部が上下方向の他方に移動するように、前記複数の接合部の位置が定められていることを特徴とする搬送計量装置。
【請求項2】
請求項1に記載の搬送計量装置であって、
前記搬送ベルトは、水平に配置された一対のローラの間に掛け渡されているとともに、互いに対蹠位置に設けられた2つの接合部を有することを特徴とする搬送計量装置。
【請求項3】
請求項1または請求項2に記載の搬送計量装置であって、
前記接合部は、前記搬送ベルトの幅方向に対して傾斜していることを特徴とする搬送計量装置。
【請求項4】
請求項3に記載の搬送計量装置であって、
前記接合部は、フィンガージョイント方式の接合部であり、大局視において前記搬送ベルトの幅方向に対して傾斜していることを特徴とする搬送計量装置。
【請求項5】
請求項1または請求項2に記載の搬送計量装置であって、
前記接合部は、フィンガージョイント方式の接合部であり、大局視において更に曲折していることを特徴とする搬送計量装置。
【請求項6】
被計量物を搬送しつつ当該被計量物の重量を計測する搬送計量装置であって、
無端状の搬送ベルトを回動させることにより前記搬送ベルト上の被計量物を搬送する搬送部と、
前記搬送ベルト上において搬送される被計量物の重量を計測する計量部と、
を備え、
前記搬送ベルトは、前記搬送ベルトの幅方向に対して傾斜した接合部を有することを特徴とする搬送計量装置。
【請求項7】
請求項6に記載の搬送計量装置であって、
前記接合部は、フィンガージョイント方式の接合部であり、大局視において前記搬送ベルトの幅方向に対して傾斜していることを特徴とする搬送計量装置。
【請求項8】
被計量物を搬送しつつ当該被計量物の重量を計測する搬送計量装置であって、
無端状の搬送ベルトを回動させることにより前記搬送ベルト上の被計量物を搬送する搬送部と、
前記搬送ベルト上において搬送される被計量物の重量を計測する計量部と、
を備え、
前記搬送ベルトは、フィンガージョイント方式であるとともに大局視において更に曲折した接合部を有することを特徴とする搬送計量装置。
【請求項1】
被計量物を搬送しつつ当該被計量物の重量を計測する搬送計量装置であって、
無端状の搬送ベルトを回動させることにより前記搬送ベルト上の被計量物を搬送する搬送部と、
前記搬送ベルト上において搬送される被計量物の重量を計測する計量部と、
を備え、
前記搬送ベルトは複数の接合部を有し、
前記搬送部において前記複数の接合部のうちのある1つの接合部が上下方向の一方に移動するときには、前記複数の接合部のうちの他の1つの接合部が上下方向の他方に移動するように、前記複数の接合部の位置が定められていることを特徴とする搬送計量装置。
【請求項2】
請求項1に記載の搬送計量装置であって、
前記搬送ベルトは、水平に配置された一対のローラの間に掛け渡されているとともに、互いに対蹠位置に設けられた2つの接合部を有することを特徴とする搬送計量装置。
【請求項3】
請求項1または請求項2に記載の搬送計量装置であって、
前記接合部は、前記搬送ベルトの幅方向に対して傾斜していることを特徴とする搬送計量装置。
【請求項4】
請求項3に記載の搬送計量装置であって、
前記接合部は、フィンガージョイント方式の接合部であり、大局視において前記搬送ベルトの幅方向に対して傾斜していることを特徴とする搬送計量装置。
【請求項5】
請求項1または請求項2に記載の搬送計量装置であって、
前記接合部は、フィンガージョイント方式の接合部であり、大局視において更に曲折していることを特徴とする搬送計量装置。
【請求項6】
被計量物を搬送しつつ当該被計量物の重量を計測する搬送計量装置であって、
無端状の搬送ベルトを回動させることにより前記搬送ベルト上の被計量物を搬送する搬送部と、
前記搬送ベルト上において搬送される被計量物の重量を計測する計量部と、
を備え、
前記搬送ベルトは、前記搬送ベルトの幅方向に対して傾斜した接合部を有することを特徴とする搬送計量装置。
【請求項7】
請求項6に記載の搬送計量装置であって、
前記接合部は、フィンガージョイント方式の接合部であり、大局視において前記搬送ベルトの幅方向に対して傾斜していることを特徴とする搬送計量装置。
【請求項8】
被計量物を搬送しつつ当該被計量物の重量を計測する搬送計量装置であって、
無端状の搬送ベルトを回動させることにより前記搬送ベルト上の被計量物を搬送する搬送部と、
前記搬送ベルト上において搬送される被計量物の重量を計測する計量部と、
を備え、
前記搬送ベルトは、フィンガージョイント方式であるとともに大局視において更に曲折した接合部を有することを特徴とする搬送計量装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2009−107802(P2009−107802A)
【公開日】平成21年5月21日(2009.5.21)
【国際特許分類】
【出願番号】特願2007−283587(P2007−283587)
【出願日】平成19年10月31日(2007.10.31)
【出願人】(000147833)株式会社イシダ (859)
【Fターム(参考)】
【公開日】平成21年5月21日(2009.5.21)
【国際特許分類】
【出願日】平成19年10月31日(2007.10.31)
【出願人】(000147833)株式会社イシダ (859)
【Fターム(参考)】
[ Back to top ]