
搬送車システム
【課題】経路上に進入禁止区間が設けられた場合であっても、効率的な搬送作業を可能とする搬送車システムを提供すること。
【解決手段】経路140と、複数の搬送車300と、複数の搬送車300の制御を行うコントローラ120とを備える搬送車システム100であって、MCS120は、搬送要求を受信する通信部121と、進入禁止区間を示す区間情報および予備期間を示す予備期間情報を記憶する記憶部122と、搬送要求が、予備期間内において実行の開始が予定され、かつ、目的地が進入禁止区間に含まれている特定搬送要求であるか否かを判定する判定部125と、当該搬送要求が特定搬送要求であると判定された場合、目的地の代わりとなる代替目的地を決定する代替目的地決定部126と、決定された代替目的地に、複数の搬送車200のうちのいずれかの搬送車200を向かわせるための搬送指令を送出する指令送出部127とを備える。
【解決手段】経路140と、複数の搬送車300と、複数の搬送車300の制御を行うコントローラ120とを備える搬送車システム100であって、MCS120は、搬送要求を受信する通信部121と、進入禁止区間を示す区間情報および予備期間を示す予備期間情報を記憶する記憶部122と、搬送要求が、予備期間内において実行の開始が予定され、かつ、目的地が進入禁止区間に含まれている特定搬送要求であるか否かを判定する判定部125と、当該搬送要求が特定搬送要求であると判定された場合、目的地の代わりとなる代替目的地を決定する代替目的地決定部126と、決定された代替目的地に、複数の搬送車200のうちのいずれかの搬送車200を向かわせるための搬送指令を送出する指令送出部127とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数の処理装置に沿って設けられた経路と、当該経路に沿って走行する搬送車とを備える搬送車システムに関する。
【背景技術】
【0002】
従来、部品実装基板などの生産工場において、部品実装機等の複数の処理装置に沿って設けられた経路と、当該経路に沿って走行する搬送車とを備える搬送車システムが存在する。このような搬送車システムでは、基板および部品等の搬送対象物の搬送作業を効率化するための種々の工夫がなされている。
【0003】
例えば、特許文献1には、処理装置の近傍に設置される装置前自動倉庫に関する技術について開示されている。具体的には、当該装置前自動倉庫は、処理装置のメンテナンス時に一部の構成要素を移動させる構造が採用されている。これにより、処理装置のメンテナンスが容易に行われる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−285279号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来の搬送車システムでは、上記のように処理装置のメンテナンスが行われる場合、例えばメンテナンスを行う作業者の安全の確保のために、当該処理装置を含む所定のエリアに、搬送車が進入できないような制御がなされる。
【0006】
つまり、当該搬送車システムにおける搬送車の経路の一部の区間に対し進入禁止の措置がとられる。
【0007】
この場合、進入禁止区間に進入しようとする搬送車は、例えばソフトウェアまたはハードウェアによるインターロックにより走行を停止し、例えば上位の搬送コントローラに進入不可(走行停止)の旨を報告する。
【0008】
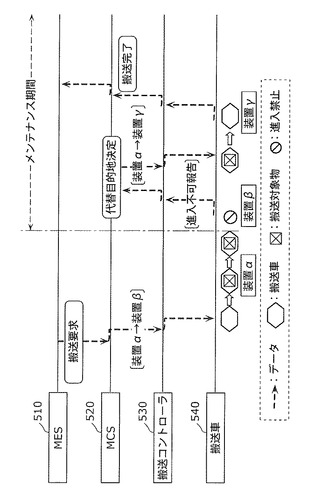
図10は、従来の搬送車システムにおける搬送車の制御の一例を示すタイムチャートである。
【0009】
図10に示すように、従来の搬送車システムにおいて、MES(Manufacturing Execution System)510から、MCS(Material Control System)520に搬送要求が送信される。当該搬送要求には、例えば、あるエリアにある基板を他のエリアの処理装置に搬送する旨が示される。
【0010】
MCS520は、当該搬送要求に対応する搬送指令(例えば装置αから基板を受け取り、装置βに搬送する指令)を搬送コントローラ530に送信する。
【0011】
搬送コントローラ530は、当該搬送指令を受信すると、例えば、複数の搬送車の中から装置αへの到着時間が最も短いと推測される搬送車540を特定し、特定した搬送車540に、基板を装置αから受け取って装置βに搬送するよう指示を行う。
【0012】
搬送車540は当該指示に従い、経路に沿って装置αまで走行し、装置αから基板を受け取り、装置βに向かって走行する。
【0013】
そして、搬送車540が装置βに到着する前に、例えば装置βまたはその近傍の処理装置のメンテナンスが開始されている場合、つまり、装置βの近傍の経路の一部の区間への進入禁止措置が開始されている場合、搬送車540は、当該区間へ進入する前に走行を停止する。
【0014】
さらに、搬送車540は、進入不可(つまり、走行停止)の旨を搬送コントローラ530に報告する。走行停止の旨の報告を受けた搬送コントローラ530は、搬送車540が走行停止である旨をMCS520に報告する。MCS520は当該報告を受けると、代替目的地を決定する。
【0015】
具体的には、MCS520は、当初の目的地であった装置βに代えて、装置βと同じ処理が可能な処理装置(例えば装置γ)を決定する。
【0016】
MCS520は、変更後の搬送指令(装置α→装置γ)を搬送コントローラ530に送信し、搬送コントローラ530は、搬送車540に装置γに向かうよう指示をする。
【0017】
搬送車540は当該指示に従い、装置γに向かって走行し、装置αから受け取っていた基板を装置γに渡す。その後、搬送車540からの搬送完了報告が、搬送コントローラ530およびMCS520を経由し、MES510にまで伝達される。
【0018】
このように、例えば処理装置のメンテナンスを理由に進入禁止区間が経路上に設けられた場合、当該進入禁止区間に進入しようとしていた搬送車の走行は停止され、代替となる目的地(代替となる処理装置)が上位のコントローラによって決定される。
【0019】
つまり、当該メンテナンスのための作業が滞りなく実行されるとともに、走行が停止された搬送車によって担われるべき搬送作業は、代替目的地が決定されることで、適切に処理される。
【0020】
しかしながら、進入禁止区間に進入しようとしていた搬送車は、必然的に、進入禁止区間の手前で走行を停止し、代替目的地の決定を待たなければならない。
【0021】
このことは、搬送車システムにおける物品の搬送作業の効率を低下させる要因の一つとなる。
【0022】
例えば、何百台もの処理装置が設置された大規模な生産現場では、同時期に各所でメンテナンスが発生する可能性がある。この場合、これらメンテナンスの実施のために設けられた複数の進入禁止区間の手前で、多数の搬送車が走行を停止する状態が発生することが予想される。つまり、搬送作業の効率が著しく低下する場合も考えられる。
【0023】
本発明は、上記従来の課題を考慮し、経路上に進入禁止区間が設けられた場合であっても、効率的な搬送作業を可能とする搬送車システムを提供することを目的とする。
【課題を解決するための手段】
【0024】
上記従来の課題を解決するため、本発明の一態様に係る搬送車システムは、複数の処理装置に沿って設けられた経路と、前記経路に沿って走行する複数の搬送車と、前記複数の搬送車の制御を行うコントローラとを備える搬送車システムであって、前記コントローラは、前記複数の搬送車のうちの一つの搬送車を前記経路上の目的地に向かわせる必要の生じる搬送要求を受信する通信部と、進入禁止の措置が所定の期間なされる予定の前記経路の一部の区間である進入禁止区間を示す区間情報、および、前記進入禁止の措置が開始される予定の開始時刻よりも前の所定の時刻から前記開始時刻までの期間である予備期間を示す予備期間情報を記憶する記憶部と、前記通信部により受信された搬送要求が、前記予備期間情報に示される予備期間内において実行の開始が予定され、かつ、前記目的地が前記区間情報に示される進入禁止区間に含まれている特定搬送要求であるか否かを判定する判定部と、前記判定部により前記搬送要求が特定搬送要求であると判定された場合、前記目的地の代わりとなる代替目的地であって、前記進入禁止区間に含まれない前記経路上の代替目的地を決定する代替目的地決定部と、前記代替目的地決定部により決定された代替目的地に、前記複数の搬送車のうちのいずれかの搬送車を向かわせるための搬送指令を送出する指令送出部とを備える。
【0025】
この構成によれば、搬送車を制御するコントローラは、予定される進入禁止区間を示す区間情報と、進入禁止措置の開始時刻前の所定の期間である予備期間を示す予備期間情報とを記憶している。そのため、コントローラは、搬送要求を受信した場合に、その搬送要求が、当該開始時刻に近い時刻に開始が予定され、かつ、目的地が当該進入禁止区間内に含まれる要求であるか否かを判定することができる。
【0026】
簡単にいうと、コントローラは、進入禁止区間が存在するために搬送車が目的地に到達できない可能性のある搬送要求を、その搬送要求に従った作業が開始される前に特定することができる。
【0027】
さらに、コントローラは、このような目的地に到達できない可能性のある搬送要求における目的地の代わりとなる代替目的地を決定し、決定した代替目的地に、搬送車を向かわせることができる。
【0028】
その結果、複数の搬送車のそれぞれが、進入禁止区間の前で停止して代替目的地の決定を待つような無駄な時間の発生が抑制される。
【0029】
このよに、本態様の搬送車システムによれば、経路上に進入禁止区間が設けられた場合であっても、効率的な搬送作業を可能とすることができる。
【0030】
また、本発明の一態様に係る搬送車システムにおいて、前記判定部は、前記通信部により受信された搬送要求が、前記予備期間内において実行の開始が予定され、かつ、前記目的地が前記進入禁止区間に含まれている場合であっても、前記搬送要求に対応する搬送車の前記目的地への到着予定時刻が、前記開始時刻よりも前である場合は、前記搬送要求を前記特定搬送要求と判定せず、前記指令送出部は、前記目的地に、前記複数の搬送車のうちのいずれかの搬送車を向かわせるための搬送指令を送出するとしてもよい。
【0031】
この構成によれば、予備期間に実行の開始が予定され、進入禁止となる区間に含まれる場所を目的地とする搬送要求であっても、搬送車の当該目的地への到着予定が、当該区間が進入禁止となる前であると推測される搬送要求についてはそのまま実行される。
【0032】
従って、本態様の搬送車システムによれば、複数の搬送要求のそれぞれに対する、そのまま実行すべきか否かの判定が、より精度よく実行される。
【0033】
また、本発明の一態様に係る搬送車システムにおいて、前記判定部はさらに、前記通信部により受信された搬送要求が、前記予備期間情報に示される予備期間内において実行の開始が予定され、前記目的地が前記区間情報に示される進入禁止区間に含まれており、前記目的地からの物品の搬出の要求を示し、かつ、前記搬送要求に対応する搬送車の前記目的地への到着予定時刻が、前記開始時刻よりも後である場合は、前記搬送要求を実行不可と判定し、前記通信部はさらに、前記搬送要求の送信元の装置に、前記搬送要求が実行不可である旨を報告するとしてもよい。
【0034】
この構成によれば、ある搬送要求が、例えば、進入禁止区間に含まれる位置に配置された処理装置からの物品の搬出を要求するものであり、かつ、搬送車の当該処理装置への到着が進入禁止の開始時刻に間に合いそうにない場合は、当該搬送要求が実行不可であると判断される。
【0035】
つまり、従来のように、搬送車が、搬出すべき物品が存在する処理装置の近傍に到達した時点で、当該搬送要求が実行不可であると判断されるのではなく、搬送車が当該処理装置に向かって走行を開始する前に、当該搬送要求が実行不可であるとの判断がなされる。
【0036】
すなわち、本態様の搬送車システムによれば、目的地からの物品の搬出を要求する搬送要求であって、即座には実行が不可能な搬送要求が発生した場合、従来よりも迅速に実行不可である旨の判定がなされる。そのため、他の搬送要求を先に処理するなどの事後の処理を、従来よりも迅速に行うことが可能となる。
【0037】
また、本発明は、上記いずれかの態様に係る搬送車システムが実行する特徴的な処理を含む、搬送車の制御方法として実現することもできる。また、当該搬送車の制御方法が含む各処理をコンピュータに実行させるためのプログラムとして実現すること、および、そのプログラムが記録された記録媒体として実現することもできる。そして、そのプログラムをインターネット等の伝送媒体又はDVD等の記録媒体を介して配信することもできる。
【発明の効果】
【0038】
本発明によれば、経路上に進入禁止区間が設けられた場合であっても、効率的な搬送作業を可能とする搬送車システムを提供することを提供することができる。
【図面の簡単な説明】
【0039】
【図1】図1は、本発明の実施の形態の搬送車システムのハードウェア構成の概要を示す図である。
【図2】図2は、実施の形態における搬送車の外観を示す斜視図である。
【図3】図3は、実施の形態におけるMCSの主要な機能構成を示す図である。
【図4】図4は、実施の形態における搬送要求の内容の一例を示す模式図である。
【図5A】図5Aは、実施の形態におけるメンテナンス情報のデータ構成の一例を示す図である。
【図5B】図5Bは、実施の形態におけるメンテナンス情報のデータ構成の別の一例を示す図である。
【図6】図6は、実施の形態における経路に設けられる進入禁止区間の一例を示す図である。
【図7】図7は、実施の形態におけるMCSの処理の流れの一例を示すフロー図である。
【図8】図8は、実施の形態の搬送車システムにおける搬送車の制御の一例を示すタイムチャートである。
【図9】図9は、実施の形態におけるMCSの処理の流れの別の一例を示すフロー図である。
【図10】図10は、従来の搬送車システムにおける搬送車の制御の一例を示すタイムチャートである。
【発明を実施するための形態】
【0040】
以下に、本発明の実施形態に係る搬送車システムついて、図面を参照しながら説明する。なお、各図は、模式図であり、必ずしも厳密に図示したものではない。
【0041】
また、以下で説明する実施の形態では、本発明の好ましい一具体例が示されている。実施の形態で示される数値、形状、構成要素、構成要素の配置および接続形態などは、一例であり、本発明を限定する主旨ではない。本発明は、請求の範囲によって限定される。よって、以下の実施の形態における構成要素のうち、独立請求項に記載されていない構成要素は、本発明の課題を達成するのに必ずしも必要ではないが、より好ましい形態を構成する要素として説明される。
【0042】
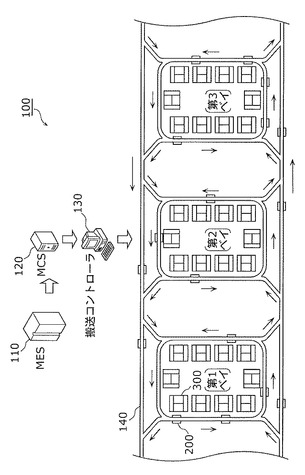
図1は、本発明の実施の形態の搬送車システム100のハードウェア構成の概要を示す図である。
【0043】
図1に示すように、搬送車システム100は、MCS(Material Control System)120と、搬送コントローラ130と、経路140と、複数の搬送車200とを備える。
【0044】
なお、本実施の形態において搬送車200は天井に配置された経路140に沿って走行する天井走行車である。
【0045】
図1に示す搬送車システム100は、例えば半導体素子を製造する工場に備えられており、部品実装機等の複数の処理装置300に沿って経路140が設けられている。
【0046】
また、搬送車システム100を含め、当該工場に配置された各種装置は、MES110によって制御される。
【0047】
MCS120は、本発明に係るコントローラを実現する装置の一例である。MCS120は、具体的には、搬送要求に応じて、どの物品をどこから受け取ってどこまで搬送すべきかを示す搬送指令を搬送コントローラ130に送出する装置である。
【0048】
搬送コントローラ130は、MCS120からの搬送指令に従って、複数の搬送車200のそれぞれに目的地等を示す搬送指示を行う装置である。
【0049】
なお、MES110、MCS120、および、搬送コントローラ130は、例えば、マイクロプロセッサ、ROM、RAM、ハードディスクユニット、および、上記処理を行うためのプログラムなどから構成されるコンピュータシステムにより実現される。
【0050】
また、本実施の形態において、当該工場の複数の処理装置300は、ベイという単位で分けられており、複数の処理装置300のそれぞれはいずれかのベイに所属している。
【0051】
例えば図1では、第1ベイ〜第3ベイのそれぞれには10台の処理装置300が配置されている。また、経路140は、第1ベイ〜第3ベイのそれぞれに対応する周回路(図1では、時計回りの一方通行の周回路)の部分を有しており、接続路によってこれら周回路が相互に接続されている。
【0052】
複数の搬送車200それぞれは、直接的には搬送コントローラ130からの指示に従って経路140を走行し、複数のベイそれぞれに配置された複数の処理装置300のそれぞれとの間での物品のやり取りを行うことができる。
【0053】
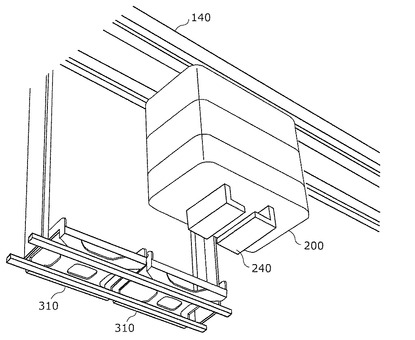
図2は、実施の形態における搬送車200の外観を示す斜視図である。
【0054】
図2に示すように、搬送車200は、経路140を形成するレールに沿って移動する天井走行車であり、物品を保持する保持部240を有する。
【0055】
また、経路140には、搬送車200に搬送される物品が一時的に載置される載置台310が複数備えられている。
【0056】
例えば、搬送車200は、搬送コントローラ130からの指示に従い、経路140上のある地点まで移動し、搬送対象の物品が置かれた移載ポートまで保持部240を降下させる。さらに、当該移載ポートに置かれた物品を保持部240により保持させて上昇させる。その後、搬送車200は、MES110からの指示に従い、次の移載ポートまで移動する。搬送車200は、当該次の移載ポートまで移動すると、保持部240を降下させ、保持部240が保持している物品を降ろした後に保持部240を上昇させる。
【0057】
なお、移載ポートのそれぞれは、複数の処理装置300のそれぞれに対応して設置されている。
【0058】
搬送車200が、このような動作を繰り返すことにより、複数の処理装置300間で基板および部品等の物品の移送が行われる。また、複数の載置台310間および、処理装置300と載置台310との間での物品の移送も行われる。
【0059】
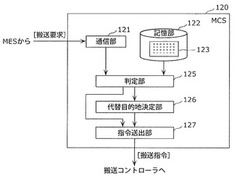
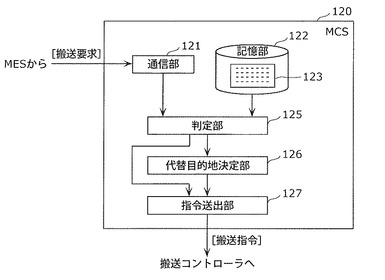
図3は、実施の形態におけるMCS120の主要な機能構成を示す図である。
【0060】
図3に示すように、MCS120は、主要な機能構成として、通信部121と、記憶部122と、判定部125と、代替目的地決定部126と、指令送出部127とを備える。
【0061】
通信部121は、複数の搬送車200のうちの一つの搬送車200を経路140上の目的地に向かわせる必要の生じる搬送要求を受信する。本実施の形態では、通信部121は、MES110から搬送要求を受信する。
【0062】
記憶部122は、進入禁止区間を示す区間情報と、予備期間を示す予備期間情報とを記憶する記憶装置である。
【0063】
なお、進入禁止区間とは、経路140の一部の区間であって、メンテナンス等を理由に進入禁止の措置が所定の期間なされる予定の区間である。また、予備期間とは、進入禁止の措置が開始される予定の開始時刻よりも前の所定の時刻から当該開始時刻までの期間である。
【0064】
本実施の形態では、少なくとも区間情報および予備期間情報を含むメンテナンス情報123が記憶部122に記憶されている。メンテナンス情報123のデータ構成例については図5Aおよび図5Bを用いて後述する。
【0065】
判定部125は、通信部121により受信された搬送要求が、予備期間情報に示される予備期間内において実行の開始が予定され、かつ、目的地が区間情報に示される進入禁止区間に含まれている特定搬送要求であるか否かを判定する。
【0066】
つまり、簡単に言うと、判定部125は、進入禁止区間が存在するために搬送車200が目的地に到達できない可能性のある搬送要求を、その搬送要求に従った作業が開始される前に特定することができる。
【0067】
代替目的地決定部126は、判定部125により搬送要求が特定搬送要求であると判定された場合、目的地の代わりとなる代替目的地であって、進入禁止区間に含まれない経路140上の代替目的地を決定する。
【0068】
例えば、目的地である処理装置300が、進入禁止区間に含まれる位置にある場合、当該処理装置300と同じ処理を実行可能であって、進入禁止区間外に配置された他の処理装置300が代替目的地として決定される。
【0069】
指令送出部127は、代替目的地決定部126により決定された代替目的地に、複数の搬送車200のうちのいずれかの搬送車200を向かわせるための搬送指令を送出する。
【0070】
本実施の形態では、指令送出部127は、搬送コントローラ130に対して搬送指令を送出する。搬送コントローラ130は、搬送指令を受け取ると、当該搬送指令に示される作業を、例えば、当該搬送指令に示される作業を速やか開始することのできる搬送車200に実行させる。
【0071】
以上の機能的な構成を有するMCS120が処理または保持する各種の情報の例を図4、図5A、および図5Bを用いて説明する。
【0072】
図4は、実施の形態における搬送要求の内容の一例を示す模式図である。
【0073】
例えば、図4に示すように、MES110から、第1ベイに存在する物品Aを、第2ベイの処理装置βに搬送する旨の搬送要求がMCS120に送信される。
【0074】
MCS120は当該搬送要求を受信すると、基本的な処理として、例えば、物品Aの存在場所(どの処理装置300に存在するか)、および、処理装置βの第2ベイにおける位置等を確認する。また、これらの確認後、MCS120は、基本的な処理として、搬送コントローラ130に、例えば、処理装置αの物品Aを、目的地である処理装置βへ搬送すべき旨を含む搬送指令を送出する。
【0075】
ここで、上述のように、例えばいずれかの処理装置300のメンテナンスを理由に、経路140の一部の区間に対し進入禁止の措置がとられる場合がある。この場合、搬送車200は、進入禁止の措置が継続している間、当該区間に含まれる処理装置に到達できない。
【0076】
そこで、本実施の形態のMCS120は、予めメンテナンスに関する情報を取得および記憶し、当該情報を参照することで、進入禁止区間に関与することが推定される搬送要求については、代替目的地を決定する。これにより、複数の搬送車200それぞれの無駄な停止時間の発生を抑制することができる。
【0077】
本実施の形態のMCS120の、より具体的な処理の流れについては図7等を用いて後述する。
【0078】
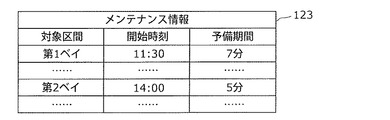
図5Aは、実施の形態におけるメンテナンス情報123のデータ構成の一例を示す図である。
【0079】
図5Aに示すメンテナンス情報123は、データ項目として、“対象区間”、“開始時刻”、および“予備期間”を有している。
【0080】
“対象区間”は、メンテナンスの作業が実行されることで進入禁止の措置がとられる経路140の一部の区間(つまり進入禁止区間)を示すデータ項目である。本実施の形態では、対象区間は、ベイ単位で規定されていが、例えば経路140上の2点を示す情報によって対象区間が規定されてもよい。つまり、対象区間の規定の方法は特定の方法には限定されない。
【0081】
“開始時刻”は、メンテナンスの開始時刻を示すデータ項目である。つまり、進入禁止の措置が開始される時刻を示すデータ項目である。
【0082】
“予備期間”は、当該開始時刻よりも前の所定の時刻から当該開始時刻までの期間を示す情報である。例えば当該工場内において、当該対象区間への到達に要する最大時間が予備期間として設定される。
【0083】
つまり、図5Aの例で説明すると、第1ベイから最も遠い場所にある搬送車200は、11:30から進入禁止となる第1ベイに遅くとも7分程度で到達するであろうことを意味する。
【0084】
言い換えると、どの搬送車200であっても、例えば、11:22に、第1ベイに向かって走行を開始した場合は、進入禁止となる前に第1ベイに到着すると推測されることを意味する。
【0085】
なお、5Aに示す“対象区間”は、本発明に係る区間情報を示すデータ項目の一例である。また、5Aに示す“開始時刻”および“予備期間”は、本発明に係る予備期間情報を示すデータ項目の一例である。
【0086】
また、図5Aに示すメンテナンス情報123のデータ構成は一例であり、各メンテナンスの終了時刻等の他の情報がメンテナンス情報123に含まれていてもよい。また、各データ項目における形式も図5A以外の形式であってもよい。
【0087】
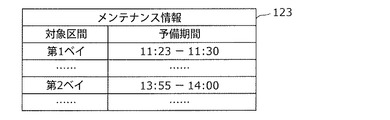
図5Bは、実施の形態におけるメンテナンス情報123のデータ構成の他の一例を示す図である。
【0088】
図5Bに示すメンテナンス情報123における予備期間は、予備期間の開始時刻とメンテナンスの開始時刻とで表されている。例えば、判定部125は、当該メンテナンス情報123を参照することで、第1ベイが11:30から進入禁止になることを知ることができる。また、例えば11:23以降に、搬送車200を第1ベイに向かわせた場合、当該搬送車200が、第1ベイに進入できずに第1ベイの手前で停止する可能性があると判断することができる。
【0089】
また、メンテナンスの場所および開始時刻に関係なく、例えば一律に“10分”が、各メンテナンスについての予備的な時間として記憶部122に記憶されていてもよい。この場合、それぞれのメンテナンスの開始時刻の10前から各メンテナンスの開始時刻までが、それぞれのメンテナンスについての予備期間として扱われる。
【0090】
なお、図5Aおよび図5Bに例示されるメンテナンス情報123は、例えばMES110を介して、または、MCS120に接続された入力デバイス(図示せず)を介して、オペレータまたは他の装置から入力される。また、例えば、毎日、工場の操業開始前に、当日に予定されるメンテナンスの内容に応じてメンテナンス情報123が更新される。
【0091】
次に、図6〜図9を用いて、実施の形態における搬送車システム100の動作を、MCS120による情報処理の流れを中心に説明する。
【0092】
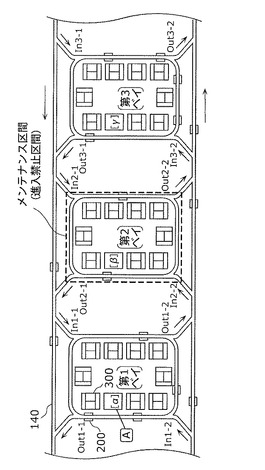
図6は、実施の形態における経路140に設けられる進入禁止区間の一例を示す図である。
【0093】
例えば、第2ベイに属する処理装置300の修理、または、第2ベイに対応して配置された周回路を形成する経路140の補修などのメンテナンス作業のために、経路140の当該周回路の区間が進入禁止とされる場合を想定する。
【0094】
この場合、例えば、ある搬送車200が、当該進入禁止の措置の開始の前に、第1ベイに配置された処理装置αに存在する物品Aの、第2ベイに配置された処理装置βまでの搬送を開始した場合であっても、処理装置βに到達できない可能性がある。
【0095】
より具体的には、処理装置αから物品Aを受け取った搬送車200は、第1ベイを、出口(Out1−2)から脱出し、第2ベイの入り口(In2−2)から第2ベイに進入しようとする。
【0096】
しかし、この場合、搬送車200は、ソフトウェアまたはハードウェアによるインターロックにより、第2ベイへの進入は阻止される。つまり、搬送車200は走行の停止を余儀なくされる。
【0097】
本実施の形態の搬送車システム100では、このような事態の発生を防止するために、具体的には以下の処理が実行される。
【0098】
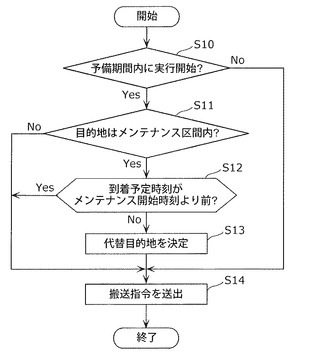
図7は、実施の形態におけるMCS120の処理の流れの一例を示すフロー図である。
【0099】
MCS120の通信部121が、MES110から搬送要求を受け取ると、判定部125は、当該搬送要求の実行開始時刻が予備期間内であるか否かを判定する(S10)。
【0100】
例えば、MES110から受信した搬送要求が即座に実行可能である場合、または、即座に実行すべきことが予め決定されている場合を想定する。この場合、当該判定の時点の時刻が、記憶部122のメンテナンス情報123に示される複数のメンテナンスそれぞれの予備期間に含まれているか否かが判定される。
【0101】
例えば、当該判定の時点の時刻が13:58であれば、当該搬送要求の実行開始時刻は予備期間内であると判定される(S10でYes、図5Aまたは図5B参照)。
【0102】
判定部125は、当該搬送要求の実行開始時刻は予備期間内であると判定した場合、当該搬送要求に示される目的地が、メンテナンス区間内、つまり、進入禁止区間内であるか否かを判定する(S11)。
【0103】
例えば、当該目的地が図4に示すように第2ベイの処理装置βである場合、当該目的地は進入禁止区間内であると判定される(S11でYes)。
【0104】
判定部125は、当該目的地は進入禁止区間内であると判定した場合、本実施の形態では、到着予定時刻が当該メンテナンスの開始時刻よりも前か否かを判定する(S12)。
【0105】
具体的には、当該搬送要求に対応する搬送車200の当該目的地への到着予定時刻が、当該メンテナンスの開始時刻よりも前であるか否かが判定される。
【0106】
なお、この判定には、例えば、搬送コントローラ130から収集される各搬送車200の位置等が参照される。その結果、当該搬送要求に対応する搬送車200として、当該搬送要求に応じて搬送作業を行うと推測される搬送車200(例えば処理装置βまでの時間距離が最も短い搬送車200)が特定される。さらに、当該搬送車200の位置等の情報から到着予定時刻が求められる。
【0107】
この判定の結果、当該到着予定時刻が、当該メンテナンスの開始時刻よりも前ではないと判定された場合(S12でNo)、代替目的地決定部126は、当該搬送要求に示される目的地の代替となる代替目的地を決定する(S13)。
【0108】
本実施の形態においては、目的地としてある処理装置300が指定されており、代替目的地として他の処理装置300が決定される。なお、目的地および代替目的地は処理装置300以外であってもよく、例えば、上述の載置台310等の、搬送対象物の載置場所であってもよい。
【0109】
代替目的地決定部126によって、代替目的地が決定された場合、指令送出部127は、代替目的地を示す情報を含む搬送指令を搬送コントローラ130に向けて送出する(S14)。
【0110】
なお、搬送要求の実行開始時刻が予備期間内でないと判定された場合(S10でNo)、搬送要求の目的地が進入禁止区間内でないと判定された場合(S11でNo)、および、到着予定時刻がメンテナンスの開始時刻よりも前であると判定された場合(S12でYes)は、代替目的地は決定されない。つまり、当該搬送要求に従った搬送指令が指令送出部127から送出される(S14)。
【0111】
ここで、到着予定時刻がメンテナンスの開始時刻(進入禁止措置の開始時刻)よりも前であるか否かの判定(S12)は実行されなくてもよい。
【0112】
つまり、ある搬送要求が、予備期間内において実行の開始が予定され、かつ、目的地が進入禁止区間に含まれている特定搬送要求である場合は、常に、代替目的地が決定されてもよい。こうした場合であっても、搬送車200が、進入禁止区間の手前で停止し、次の指令を待つような無駄な時間の発生は抑制される。
【0113】
以上の処理の流れを中心に、搬送要求の発生から当該搬送要求の実行の完了までを、図8を参照しながら、具体例を用いて説明する。
【0114】
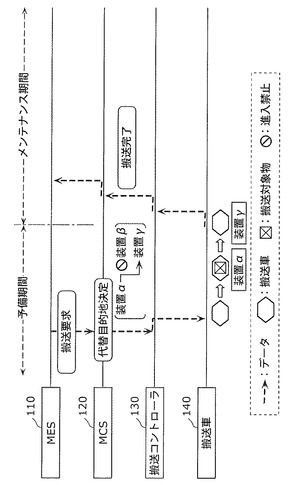
図8は、実施の形態の搬送車システム100における搬送車の制御の一例を示すタイムチャートである。
【0115】
図8に示すように、MES110からMCS120に搬送要求が送信される。ここで、この搬送要求は、例えば、図4に示す内容である場合を想定する。つまり、当該搬送要求に示される目的地が処理装置βである場合を想定する。
【0116】
さらに、MCS120が、当該搬送要求を処理する時点の時刻が13:58である場合を想定する。この場合、当該時刻は、例えば図5Aまたは図5Bに示すメンテナンス情報123を参照すると、処理装置βが配置されている第2ベイのメンテナンスについての予備期間内の時刻である。
【0117】
そのため、MCS120の代替目的地決定部126によって、代替目的地である処理装置γが決定される。なお、処理装置γは、処理装置βと同じ機能を有している処理装置300であり、第3ベイに配置されている処理装置300である(図6参照)。
【0118】
MCS120は、装置αの物品Aを装置γに搬送する旨を示す搬送指令を搬送コントローラ130に送信する。
【0119】
搬送コントローラ130は、当該搬送指令を受信した場合、例えば処理装置αに最も早く到着でき、かつ、物品の搬送が可能な搬送車200を特定し、当該搬送車200に、装置αの物品Aを装置γに搬送する旨の搬送指示を行う。
【0120】
当該搬送指示を受けた搬送車200は、処理装置αに到着後、物品Aを受け取り、処理装置γに向かって走行する。処理装置γに到着した当該搬送車200は、物品Aを処理装置γに渡す。その後、当該搬送車200からの搬送完了報告が搬送コントローラ130およびMCS120を経由し、MES110にまで伝達される。
【0121】
以上のように、本実施の形態の搬送車システム100によれば、事前に予定されている事象(メンテナンス等)に起因して設定される進入禁止区間について、その開始時刻の前の所定の期間内(予備期間内)に実行が開始される搬送要求が、MCS120により特定される。
【0122】
また、特定された搬送要求に示される目的地の代替となる代替目的地が決定され、当該代替目的地を示す搬送指令が搬送コントローラ130に対して送出される。
【0123】
その結果、複数の搬送車200のそれぞれが、進入禁止区間の前で停止して代替目的地の決定を待つような無駄な時間の発生が抑制される。
【0124】
なお、本実施の形態では、搬送要求が、目的地への物品の搬送を示す要求である場合の処理について説明した(図4参照)。
【0125】
しかしながら、本実施の形態の搬送車システム100は、搬送要求が、目的地からの物品の搬出である場合についても同様に、効率的な搬送作業を実現することができる。
【0126】
ここで、ある場所から他の場所への搬送車200の移動を伴う要求を、例えば、From−To要求と表現する。この場合、“From”に対応する場所および“To”に対応する場所のいずれが目的地として扱われた場合であっても、本実施の形態の搬送車システム100は適切な処理を行うことができる。
【0127】
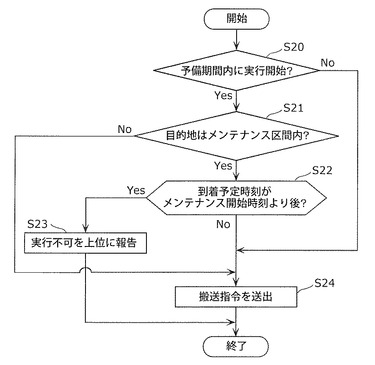
図9は、実施の形態におけるMCS120の処理の流れの別の一例を示すフロー図である。
【0128】
MCS120の通信部121が、MES110から、目的地からの物品の搬出を示す搬送要求を受け取ると、判定部125は、当該搬送要求の実行開始時刻が予備期間内であるか否かを判定する(S20)。
【0129】
例えば、その時点の時刻が13:58であれば、当該搬送要求の実行開始時刻は予備期間内であると判定される(S20でYes、図5Aまたは図5B参照)。
【0130】
判定部125は、当該搬送要求の実行開始時刻は予備期間内であると判定した場合、当該搬送要求に示される目的地が、メンテナンス区間内、つまり、進入禁止区間内であるか否かを判定する(S21)。
【0131】
例えば、当該搬送要求が第2ベイの処理装置βからの物品の搬出を示す場合、当該目的地は進入禁止区間内であると判定される(S21でYes)。
【0132】
判定部125は、当該目的地は進入禁止区間内であると判定した場合、到着予定時刻が、当該メンテナンスの開始時刻よりも後か否かを判定する(S22)。
【0133】
具体的には、当該搬送要求に対応する搬送車200の当該目的地への到着予定時刻が、当該メンテナンスの開始時刻よりも後であるか否かが判定される。
【0134】
なお、当該搬送要求に対応する搬送車200の特定には、図7についての説明で記載された手法が採用される。
【0135】
上記判定の結果、当該到着予定時刻が、当該メンテナンスの開始時刻よりも後であると判定された場合(S22でYes)、通信部121は、当該搬送要求が実行不可である旨を、当該搬送要求の送信元の装置であるMES110に報告する。
【0136】
MES110は、当該搬送要求が実行不可である旨が報告された場合、例えば、当該搬送要求を所定の期間保持した後に再びMCS120に送信する。
【0137】
また、搬送要求の実行開始時刻が予備期間内でないと判定された場合(S20でNo)、搬送要求の目的地が進入禁止区間内でないと判定された場合(S21でNo)、および、到着予定時刻がメンテナンスの開始時刻よりも後ではないと判定された場合(S22でNo)は、当該搬送要求に従った搬送指令が指令送出部127から送出される(S24)。
【0138】
ここで、従来の搬送車システムであれば、目的地からの物品の搬出要求を実行しようとする搬送車は、当該目的地が進入禁止区間に含まれる位置にある場合、進入禁止区間の手前までと到達した段階で、当該搬送要求の実行が不可である旨を上位のコントローラに報告する。その結果、当該搬送車は、次の指示が上位のコントローラからあるまで進入禁止区間の手前で停止した状態が継続することになる。
【0139】
しかし、本実施の形態における搬送車システム100であれば、予定されている事象(メンテナンス等)に起因して進入禁止区間が設定されることにより、結果として実行不可能となる搬送要求については、事前に実行不可であることが判断される。
【0140】
その結果、物品の搬出を行おうとする搬送車200が、進入禁止区間の手前で、次の指示があるまで停止するような無駄な時間の発生が抑制される。
【0141】
以上、本発明の搬送車システムについて、実施の形態に基づいて説明した。しかしながら、本発明は、本実施の形態に限定されるものではない。本発明の趣旨を逸脱しない限り、当業者が思いつく各種変形を本実施の形態に施したものも、あるいは、上記説明された複数の構成要素を組み合わせて構築される形態も、本発明の範囲内に含まれる。
【0142】
例えば、MCS120が受信し処理する搬送要求の形式は図4に示す形式以外であってもよい。例えば、複数の物品それぞれの存在位置をMCS120が確認可能である場合、搬送要求には搬送すべき物品の情報のみが含まれ、エリアについての情報が含まれていなくてもよい。
【0143】
また、搬送車システム100が備える複数の搬送車200は天井走行車であるとした。
【0144】
しかしながら、搬送車システム100は、天井走行車ではなく他の種類の搬送車を複数備えこれら搬送車を移動制御の対象としてもよい。
【0145】
例えば、倉庫または工場等の内部で床上を走行し物品の搬送を行う無人搬送車を、搬送車200として搬送車システム100が備えてもよい。つまり、経路140はレールによって形成されている必要はなく、搬送車200が走行可能な路面によって経路140が形成されていてもよい。
【0146】
また、MCS120は、本発明に係るコントローラを実現する装置の一例として説明したが、例えば、他の装置によって、本発明に係るコントローラが実現されてもよい。
【0147】
例えば、搬送コントローラ130が、図3に示す判定部125等を備えることで、本発明に係るコントローラが実行する処理を実行してもよい。
【0148】
また、MCS120の判定部125は、メンテナンスの終了時刻を考慮して、搬送要求が特定搬送要求であるか否かを判定してもよい。
【0149】
判定部125は、例えば、搬送車200の到着予定時刻がメンテナンスの開始時刻よりも前であるとの判定(図7のS12でNo)を行った後に、当該搬送車200が目的地から出発する予定時刻と、当該メンテナンスの終了時刻との比較を行ってもよい。
【0150】
つまり、当該搬送車200が、進入禁止措置の開始の前に目的地に到着することが予測されるが、当該搬送車200が例えば目的地で物品を受け取った後に出発する時点では、進入禁止措置が開始されていると予測される場合、当該搬送要求が特定搬送要求であると判定してもよい。すなわち、この場合、代替目的地が決定されてもよい。
【0151】
こうすることで、例えば、複数の搬送要求のそれぞれに対する、そのまま実行すべきか否かの判定が、より精度よく実行される。
【0152】
また、予備期間は、本実施の形態では、例えば当該工場内において、当該対象区間への到達に要する最大時間が予備期間として設定されるとした。しかし、当該最大時間に、搬送車200による物品の移載作業に要する時間等のマージンを加えた値が予備期間として設定されてもよい。つまり、予備期間がより長く設定されてもよい。言い換えると、予備期間の開始時刻がより早く設定されてもよい。
【0153】
この場合、例えば、搬送要求が特定搬送要求であるか否かの判定にメンテナンスの終了時刻が考慮された場合と同様の効果が得られる。
【0154】
つまり、あるメンテナンスについて、予備期間の開始時刻が早く設定されると、当該メンテナンス区間(進入禁止区間)への到着予定時刻がメンテナンスの開始時刻に比較的近いと予測される搬送要求は排除される。
【0155】
簡単に言うと、メンテナンスの開始時刻に対して余裕のある搬送要求のみがそのまま実行され、この場合は、メンテナンス区間内の目的地に到着した搬送車200が、メンテナンスの開始時刻の前に物品の積み込み等を終えて目的地から出発する可能性が高くなる。
【0156】
このように、予備期間の長さ、または、予備期間の開始時刻を、搬送車200による物品の移載作業に要する時間または目的地である処理装置300における処理の所要時間等を考慮して決定してもよい。これにより、例えば、搬送車システム100における搬送作業の効率をより向上させることが可能となる。
【産業上の利用可能性】
【0157】
本発明の搬送車システムでは、経路上に進入禁止区間が設けられた場合であっても、効率的な搬送作業が可能である。そのため、搬送車を用いて様々な種類の物品を所定の領域内で搬送するシステム等として有用である。
【符号の説明】
【0158】
100 搬送車システム
110 MES
120 MCS
121 通信部
122 記憶部
123 メンテナンス情報
125 判定部
126 代替目的地決定部
127 指令送出部
130 搬送コントローラ
140 経路
200 搬送車
240 保持部
300 処理装置
310 載置台
【技術分野】
【0001】
本発明は、複数の処理装置に沿って設けられた経路と、当該経路に沿って走行する搬送車とを備える搬送車システムに関する。
【背景技術】
【0002】
従来、部品実装基板などの生産工場において、部品実装機等の複数の処理装置に沿って設けられた経路と、当該経路に沿って走行する搬送車とを備える搬送車システムが存在する。このような搬送車システムでは、基板および部品等の搬送対象物の搬送作業を効率化するための種々の工夫がなされている。
【0003】
例えば、特許文献1には、処理装置の近傍に設置される装置前自動倉庫に関する技術について開示されている。具体的には、当該装置前自動倉庫は、処理装置のメンテナンス時に一部の構成要素を移動させる構造が採用されている。これにより、処理装置のメンテナンスが容易に行われる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−285279号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来の搬送車システムでは、上記のように処理装置のメンテナンスが行われる場合、例えばメンテナンスを行う作業者の安全の確保のために、当該処理装置を含む所定のエリアに、搬送車が進入できないような制御がなされる。
【0006】
つまり、当該搬送車システムにおける搬送車の経路の一部の区間に対し進入禁止の措置がとられる。
【0007】
この場合、進入禁止区間に進入しようとする搬送車は、例えばソフトウェアまたはハードウェアによるインターロックにより走行を停止し、例えば上位の搬送コントローラに進入不可(走行停止)の旨を報告する。
【0008】
図10は、従来の搬送車システムにおける搬送車の制御の一例を示すタイムチャートである。
【0009】
図10に示すように、従来の搬送車システムにおいて、MES(Manufacturing Execution System)510から、MCS(Material Control System)520に搬送要求が送信される。当該搬送要求には、例えば、あるエリアにある基板を他のエリアの処理装置に搬送する旨が示される。
【0010】
MCS520は、当該搬送要求に対応する搬送指令(例えば装置αから基板を受け取り、装置βに搬送する指令)を搬送コントローラ530に送信する。
【0011】
搬送コントローラ530は、当該搬送指令を受信すると、例えば、複数の搬送車の中から装置αへの到着時間が最も短いと推測される搬送車540を特定し、特定した搬送車540に、基板を装置αから受け取って装置βに搬送するよう指示を行う。
【0012】
搬送車540は当該指示に従い、経路に沿って装置αまで走行し、装置αから基板を受け取り、装置βに向かって走行する。
【0013】
そして、搬送車540が装置βに到着する前に、例えば装置βまたはその近傍の処理装置のメンテナンスが開始されている場合、つまり、装置βの近傍の経路の一部の区間への進入禁止措置が開始されている場合、搬送車540は、当該区間へ進入する前に走行を停止する。
【0014】
さらに、搬送車540は、進入不可(つまり、走行停止)の旨を搬送コントローラ530に報告する。走行停止の旨の報告を受けた搬送コントローラ530は、搬送車540が走行停止である旨をMCS520に報告する。MCS520は当該報告を受けると、代替目的地を決定する。
【0015】
具体的には、MCS520は、当初の目的地であった装置βに代えて、装置βと同じ処理が可能な処理装置(例えば装置γ)を決定する。
【0016】
MCS520は、変更後の搬送指令(装置α→装置γ)を搬送コントローラ530に送信し、搬送コントローラ530は、搬送車540に装置γに向かうよう指示をする。
【0017】
搬送車540は当該指示に従い、装置γに向かって走行し、装置αから受け取っていた基板を装置γに渡す。その後、搬送車540からの搬送完了報告が、搬送コントローラ530およびMCS520を経由し、MES510にまで伝達される。
【0018】
このように、例えば処理装置のメンテナンスを理由に進入禁止区間が経路上に設けられた場合、当該進入禁止区間に進入しようとしていた搬送車の走行は停止され、代替となる目的地(代替となる処理装置)が上位のコントローラによって決定される。
【0019】
つまり、当該メンテナンスのための作業が滞りなく実行されるとともに、走行が停止された搬送車によって担われるべき搬送作業は、代替目的地が決定されることで、適切に処理される。
【0020】
しかしながら、進入禁止区間に進入しようとしていた搬送車は、必然的に、進入禁止区間の手前で走行を停止し、代替目的地の決定を待たなければならない。
【0021】
このことは、搬送車システムにおける物品の搬送作業の効率を低下させる要因の一つとなる。
【0022】
例えば、何百台もの処理装置が設置された大規模な生産現場では、同時期に各所でメンテナンスが発生する可能性がある。この場合、これらメンテナンスの実施のために設けられた複数の進入禁止区間の手前で、多数の搬送車が走行を停止する状態が発生することが予想される。つまり、搬送作業の効率が著しく低下する場合も考えられる。
【0023】
本発明は、上記従来の課題を考慮し、経路上に進入禁止区間が設けられた場合であっても、効率的な搬送作業を可能とする搬送車システムを提供することを目的とする。
【課題を解決するための手段】
【0024】
上記従来の課題を解決するため、本発明の一態様に係る搬送車システムは、複数の処理装置に沿って設けられた経路と、前記経路に沿って走行する複数の搬送車と、前記複数の搬送車の制御を行うコントローラとを備える搬送車システムであって、前記コントローラは、前記複数の搬送車のうちの一つの搬送車を前記経路上の目的地に向かわせる必要の生じる搬送要求を受信する通信部と、進入禁止の措置が所定の期間なされる予定の前記経路の一部の区間である進入禁止区間を示す区間情報、および、前記進入禁止の措置が開始される予定の開始時刻よりも前の所定の時刻から前記開始時刻までの期間である予備期間を示す予備期間情報を記憶する記憶部と、前記通信部により受信された搬送要求が、前記予備期間情報に示される予備期間内において実行の開始が予定され、かつ、前記目的地が前記区間情報に示される進入禁止区間に含まれている特定搬送要求であるか否かを判定する判定部と、前記判定部により前記搬送要求が特定搬送要求であると判定された場合、前記目的地の代わりとなる代替目的地であって、前記進入禁止区間に含まれない前記経路上の代替目的地を決定する代替目的地決定部と、前記代替目的地決定部により決定された代替目的地に、前記複数の搬送車のうちのいずれかの搬送車を向かわせるための搬送指令を送出する指令送出部とを備える。
【0025】
この構成によれば、搬送車を制御するコントローラは、予定される進入禁止区間を示す区間情報と、進入禁止措置の開始時刻前の所定の期間である予備期間を示す予備期間情報とを記憶している。そのため、コントローラは、搬送要求を受信した場合に、その搬送要求が、当該開始時刻に近い時刻に開始が予定され、かつ、目的地が当該進入禁止区間内に含まれる要求であるか否かを判定することができる。
【0026】
簡単にいうと、コントローラは、進入禁止区間が存在するために搬送車が目的地に到達できない可能性のある搬送要求を、その搬送要求に従った作業が開始される前に特定することができる。
【0027】
さらに、コントローラは、このような目的地に到達できない可能性のある搬送要求における目的地の代わりとなる代替目的地を決定し、決定した代替目的地に、搬送車を向かわせることができる。
【0028】
その結果、複数の搬送車のそれぞれが、進入禁止区間の前で停止して代替目的地の決定を待つような無駄な時間の発生が抑制される。
【0029】
このよに、本態様の搬送車システムによれば、経路上に進入禁止区間が設けられた場合であっても、効率的な搬送作業を可能とすることができる。
【0030】
また、本発明の一態様に係る搬送車システムにおいて、前記判定部は、前記通信部により受信された搬送要求が、前記予備期間内において実行の開始が予定され、かつ、前記目的地が前記進入禁止区間に含まれている場合であっても、前記搬送要求に対応する搬送車の前記目的地への到着予定時刻が、前記開始時刻よりも前である場合は、前記搬送要求を前記特定搬送要求と判定せず、前記指令送出部は、前記目的地に、前記複数の搬送車のうちのいずれかの搬送車を向かわせるための搬送指令を送出するとしてもよい。
【0031】
この構成によれば、予備期間に実行の開始が予定され、進入禁止となる区間に含まれる場所を目的地とする搬送要求であっても、搬送車の当該目的地への到着予定が、当該区間が進入禁止となる前であると推測される搬送要求についてはそのまま実行される。
【0032】
従って、本態様の搬送車システムによれば、複数の搬送要求のそれぞれに対する、そのまま実行すべきか否かの判定が、より精度よく実行される。
【0033】
また、本発明の一態様に係る搬送車システムにおいて、前記判定部はさらに、前記通信部により受信された搬送要求が、前記予備期間情報に示される予備期間内において実行の開始が予定され、前記目的地が前記区間情報に示される進入禁止区間に含まれており、前記目的地からの物品の搬出の要求を示し、かつ、前記搬送要求に対応する搬送車の前記目的地への到着予定時刻が、前記開始時刻よりも後である場合は、前記搬送要求を実行不可と判定し、前記通信部はさらに、前記搬送要求の送信元の装置に、前記搬送要求が実行不可である旨を報告するとしてもよい。
【0034】
この構成によれば、ある搬送要求が、例えば、進入禁止区間に含まれる位置に配置された処理装置からの物品の搬出を要求するものであり、かつ、搬送車の当該処理装置への到着が進入禁止の開始時刻に間に合いそうにない場合は、当該搬送要求が実行不可であると判断される。
【0035】
つまり、従来のように、搬送車が、搬出すべき物品が存在する処理装置の近傍に到達した時点で、当該搬送要求が実行不可であると判断されるのではなく、搬送車が当該処理装置に向かって走行を開始する前に、当該搬送要求が実行不可であるとの判断がなされる。
【0036】
すなわち、本態様の搬送車システムによれば、目的地からの物品の搬出を要求する搬送要求であって、即座には実行が不可能な搬送要求が発生した場合、従来よりも迅速に実行不可である旨の判定がなされる。そのため、他の搬送要求を先に処理するなどの事後の処理を、従来よりも迅速に行うことが可能となる。
【0037】
また、本発明は、上記いずれかの態様に係る搬送車システムが実行する特徴的な処理を含む、搬送車の制御方法として実現することもできる。また、当該搬送車の制御方法が含む各処理をコンピュータに実行させるためのプログラムとして実現すること、および、そのプログラムが記録された記録媒体として実現することもできる。そして、そのプログラムをインターネット等の伝送媒体又はDVD等の記録媒体を介して配信することもできる。
【発明の効果】
【0038】
本発明によれば、経路上に進入禁止区間が設けられた場合であっても、効率的な搬送作業を可能とする搬送車システムを提供することを提供することができる。
【図面の簡単な説明】
【0039】
【図1】図1は、本発明の実施の形態の搬送車システムのハードウェア構成の概要を示す図である。
【図2】図2は、実施の形態における搬送車の外観を示す斜視図である。
【図3】図3は、実施の形態におけるMCSの主要な機能構成を示す図である。
【図4】図4は、実施の形態における搬送要求の内容の一例を示す模式図である。
【図5A】図5Aは、実施の形態におけるメンテナンス情報のデータ構成の一例を示す図である。
【図5B】図5Bは、実施の形態におけるメンテナンス情報のデータ構成の別の一例を示す図である。
【図6】図6は、実施の形態における経路に設けられる進入禁止区間の一例を示す図である。
【図7】図7は、実施の形態におけるMCSの処理の流れの一例を示すフロー図である。
【図8】図8は、実施の形態の搬送車システムにおける搬送車の制御の一例を示すタイムチャートである。
【図9】図9は、実施の形態におけるMCSの処理の流れの別の一例を示すフロー図である。
【図10】図10は、従来の搬送車システムにおける搬送車の制御の一例を示すタイムチャートである。
【発明を実施するための形態】
【0040】
以下に、本発明の実施形態に係る搬送車システムついて、図面を参照しながら説明する。なお、各図は、模式図であり、必ずしも厳密に図示したものではない。
【0041】
また、以下で説明する実施の形態では、本発明の好ましい一具体例が示されている。実施の形態で示される数値、形状、構成要素、構成要素の配置および接続形態などは、一例であり、本発明を限定する主旨ではない。本発明は、請求の範囲によって限定される。よって、以下の実施の形態における構成要素のうち、独立請求項に記載されていない構成要素は、本発明の課題を達成するのに必ずしも必要ではないが、より好ましい形態を構成する要素として説明される。
【0042】
図1は、本発明の実施の形態の搬送車システム100のハードウェア構成の概要を示す図である。
【0043】
図1に示すように、搬送車システム100は、MCS(Material Control System)120と、搬送コントローラ130と、経路140と、複数の搬送車200とを備える。
【0044】
なお、本実施の形態において搬送車200は天井に配置された経路140に沿って走行する天井走行車である。
【0045】
図1に示す搬送車システム100は、例えば半導体素子を製造する工場に備えられており、部品実装機等の複数の処理装置300に沿って経路140が設けられている。
【0046】
また、搬送車システム100を含め、当該工場に配置された各種装置は、MES110によって制御される。
【0047】
MCS120は、本発明に係るコントローラを実現する装置の一例である。MCS120は、具体的には、搬送要求に応じて、どの物品をどこから受け取ってどこまで搬送すべきかを示す搬送指令を搬送コントローラ130に送出する装置である。
【0048】
搬送コントローラ130は、MCS120からの搬送指令に従って、複数の搬送車200のそれぞれに目的地等を示す搬送指示を行う装置である。
【0049】
なお、MES110、MCS120、および、搬送コントローラ130は、例えば、マイクロプロセッサ、ROM、RAM、ハードディスクユニット、および、上記処理を行うためのプログラムなどから構成されるコンピュータシステムにより実現される。
【0050】
また、本実施の形態において、当該工場の複数の処理装置300は、ベイという単位で分けられており、複数の処理装置300のそれぞれはいずれかのベイに所属している。
【0051】
例えば図1では、第1ベイ〜第3ベイのそれぞれには10台の処理装置300が配置されている。また、経路140は、第1ベイ〜第3ベイのそれぞれに対応する周回路(図1では、時計回りの一方通行の周回路)の部分を有しており、接続路によってこれら周回路が相互に接続されている。
【0052】
複数の搬送車200それぞれは、直接的には搬送コントローラ130からの指示に従って経路140を走行し、複数のベイそれぞれに配置された複数の処理装置300のそれぞれとの間での物品のやり取りを行うことができる。
【0053】
図2は、実施の形態における搬送車200の外観を示す斜視図である。
【0054】
図2に示すように、搬送車200は、経路140を形成するレールに沿って移動する天井走行車であり、物品を保持する保持部240を有する。
【0055】
また、経路140には、搬送車200に搬送される物品が一時的に載置される載置台310が複数備えられている。
【0056】
例えば、搬送車200は、搬送コントローラ130からの指示に従い、経路140上のある地点まで移動し、搬送対象の物品が置かれた移載ポートまで保持部240を降下させる。さらに、当該移載ポートに置かれた物品を保持部240により保持させて上昇させる。その後、搬送車200は、MES110からの指示に従い、次の移載ポートまで移動する。搬送車200は、当該次の移載ポートまで移動すると、保持部240を降下させ、保持部240が保持している物品を降ろした後に保持部240を上昇させる。
【0057】
なお、移載ポートのそれぞれは、複数の処理装置300のそれぞれに対応して設置されている。
【0058】
搬送車200が、このような動作を繰り返すことにより、複数の処理装置300間で基板および部品等の物品の移送が行われる。また、複数の載置台310間および、処理装置300と載置台310との間での物品の移送も行われる。
【0059】
図3は、実施の形態におけるMCS120の主要な機能構成を示す図である。
【0060】
図3に示すように、MCS120は、主要な機能構成として、通信部121と、記憶部122と、判定部125と、代替目的地決定部126と、指令送出部127とを備える。
【0061】
通信部121は、複数の搬送車200のうちの一つの搬送車200を経路140上の目的地に向かわせる必要の生じる搬送要求を受信する。本実施の形態では、通信部121は、MES110から搬送要求を受信する。
【0062】
記憶部122は、進入禁止区間を示す区間情報と、予備期間を示す予備期間情報とを記憶する記憶装置である。
【0063】
なお、進入禁止区間とは、経路140の一部の区間であって、メンテナンス等を理由に進入禁止の措置が所定の期間なされる予定の区間である。また、予備期間とは、進入禁止の措置が開始される予定の開始時刻よりも前の所定の時刻から当該開始時刻までの期間である。
【0064】
本実施の形態では、少なくとも区間情報および予備期間情報を含むメンテナンス情報123が記憶部122に記憶されている。メンテナンス情報123のデータ構成例については図5Aおよび図5Bを用いて後述する。
【0065】
判定部125は、通信部121により受信された搬送要求が、予備期間情報に示される予備期間内において実行の開始が予定され、かつ、目的地が区間情報に示される進入禁止区間に含まれている特定搬送要求であるか否かを判定する。
【0066】
つまり、簡単に言うと、判定部125は、進入禁止区間が存在するために搬送車200が目的地に到達できない可能性のある搬送要求を、その搬送要求に従った作業が開始される前に特定することができる。
【0067】
代替目的地決定部126は、判定部125により搬送要求が特定搬送要求であると判定された場合、目的地の代わりとなる代替目的地であって、進入禁止区間に含まれない経路140上の代替目的地を決定する。
【0068】
例えば、目的地である処理装置300が、進入禁止区間に含まれる位置にある場合、当該処理装置300と同じ処理を実行可能であって、進入禁止区間外に配置された他の処理装置300が代替目的地として決定される。
【0069】
指令送出部127は、代替目的地決定部126により決定された代替目的地に、複数の搬送車200のうちのいずれかの搬送車200を向かわせるための搬送指令を送出する。
【0070】
本実施の形態では、指令送出部127は、搬送コントローラ130に対して搬送指令を送出する。搬送コントローラ130は、搬送指令を受け取ると、当該搬送指令に示される作業を、例えば、当該搬送指令に示される作業を速やか開始することのできる搬送車200に実行させる。
【0071】
以上の機能的な構成を有するMCS120が処理または保持する各種の情報の例を図4、図5A、および図5Bを用いて説明する。
【0072】
図4は、実施の形態における搬送要求の内容の一例を示す模式図である。
【0073】
例えば、図4に示すように、MES110から、第1ベイに存在する物品Aを、第2ベイの処理装置βに搬送する旨の搬送要求がMCS120に送信される。
【0074】
MCS120は当該搬送要求を受信すると、基本的な処理として、例えば、物品Aの存在場所(どの処理装置300に存在するか)、および、処理装置βの第2ベイにおける位置等を確認する。また、これらの確認後、MCS120は、基本的な処理として、搬送コントローラ130に、例えば、処理装置αの物品Aを、目的地である処理装置βへ搬送すべき旨を含む搬送指令を送出する。
【0075】
ここで、上述のように、例えばいずれかの処理装置300のメンテナンスを理由に、経路140の一部の区間に対し進入禁止の措置がとられる場合がある。この場合、搬送車200は、進入禁止の措置が継続している間、当該区間に含まれる処理装置に到達できない。
【0076】
そこで、本実施の形態のMCS120は、予めメンテナンスに関する情報を取得および記憶し、当該情報を参照することで、進入禁止区間に関与することが推定される搬送要求については、代替目的地を決定する。これにより、複数の搬送車200それぞれの無駄な停止時間の発生を抑制することができる。
【0077】
本実施の形態のMCS120の、より具体的な処理の流れについては図7等を用いて後述する。
【0078】
図5Aは、実施の形態におけるメンテナンス情報123のデータ構成の一例を示す図である。
【0079】
図5Aに示すメンテナンス情報123は、データ項目として、“対象区間”、“開始時刻”、および“予備期間”を有している。
【0080】
“対象区間”は、メンテナンスの作業が実行されることで進入禁止の措置がとられる経路140の一部の区間(つまり進入禁止区間)を示すデータ項目である。本実施の形態では、対象区間は、ベイ単位で規定されていが、例えば経路140上の2点を示す情報によって対象区間が規定されてもよい。つまり、対象区間の規定の方法は特定の方法には限定されない。
【0081】
“開始時刻”は、メンテナンスの開始時刻を示すデータ項目である。つまり、進入禁止の措置が開始される時刻を示すデータ項目である。
【0082】
“予備期間”は、当該開始時刻よりも前の所定の時刻から当該開始時刻までの期間を示す情報である。例えば当該工場内において、当該対象区間への到達に要する最大時間が予備期間として設定される。
【0083】
つまり、図5Aの例で説明すると、第1ベイから最も遠い場所にある搬送車200は、11:30から進入禁止となる第1ベイに遅くとも7分程度で到達するであろうことを意味する。
【0084】
言い換えると、どの搬送車200であっても、例えば、11:22に、第1ベイに向かって走行を開始した場合は、進入禁止となる前に第1ベイに到着すると推測されることを意味する。
【0085】
なお、5Aに示す“対象区間”は、本発明に係る区間情報を示すデータ項目の一例である。また、5Aに示す“開始時刻”および“予備期間”は、本発明に係る予備期間情報を示すデータ項目の一例である。
【0086】
また、図5Aに示すメンテナンス情報123のデータ構成は一例であり、各メンテナンスの終了時刻等の他の情報がメンテナンス情報123に含まれていてもよい。また、各データ項目における形式も図5A以外の形式であってもよい。
【0087】
図5Bは、実施の形態におけるメンテナンス情報123のデータ構成の他の一例を示す図である。
【0088】
図5Bに示すメンテナンス情報123における予備期間は、予備期間の開始時刻とメンテナンスの開始時刻とで表されている。例えば、判定部125は、当該メンテナンス情報123を参照することで、第1ベイが11:30から進入禁止になることを知ることができる。また、例えば11:23以降に、搬送車200を第1ベイに向かわせた場合、当該搬送車200が、第1ベイに進入できずに第1ベイの手前で停止する可能性があると判断することができる。
【0089】
また、メンテナンスの場所および開始時刻に関係なく、例えば一律に“10分”が、各メンテナンスについての予備的な時間として記憶部122に記憶されていてもよい。この場合、それぞれのメンテナンスの開始時刻の10前から各メンテナンスの開始時刻までが、それぞれのメンテナンスについての予備期間として扱われる。
【0090】
なお、図5Aおよび図5Bに例示されるメンテナンス情報123は、例えばMES110を介して、または、MCS120に接続された入力デバイス(図示せず)を介して、オペレータまたは他の装置から入力される。また、例えば、毎日、工場の操業開始前に、当日に予定されるメンテナンスの内容に応じてメンテナンス情報123が更新される。
【0091】
次に、図6〜図9を用いて、実施の形態における搬送車システム100の動作を、MCS120による情報処理の流れを中心に説明する。
【0092】
図6は、実施の形態における経路140に設けられる進入禁止区間の一例を示す図である。
【0093】
例えば、第2ベイに属する処理装置300の修理、または、第2ベイに対応して配置された周回路を形成する経路140の補修などのメンテナンス作業のために、経路140の当該周回路の区間が進入禁止とされる場合を想定する。
【0094】
この場合、例えば、ある搬送車200が、当該進入禁止の措置の開始の前に、第1ベイに配置された処理装置αに存在する物品Aの、第2ベイに配置された処理装置βまでの搬送を開始した場合であっても、処理装置βに到達できない可能性がある。
【0095】
より具体的には、処理装置αから物品Aを受け取った搬送車200は、第1ベイを、出口(Out1−2)から脱出し、第2ベイの入り口(In2−2)から第2ベイに進入しようとする。
【0096】
しかし、この場合、搬送車200は、ソフトウェアまたはハードウェアによるインターロックにより、第2ベイへの進入は阻止される。つまり、搬送車200は走行の停止を余儀なくされる。
【0097】
本実施の形態の搬送車システム100では、このような事態の発生を防止するために、具体的には以下の処理が実行される。
【0098】
図7は、実施の形態におけるMCS120の処理の流れの一例を示すフロー図である。
【0099】
MCS120の通信部121が、MES110から搬送要求を受け取ると、判定部125は、当該搬送要求の実行開始時刻が予備期間内であるか否かを判定する(S10)。
【0100】
例えば、MES110から受信した搬送要求が即座に実行可能である場合、または、即座に実行すべきことが予め決定されている場合を想定する。この場合、当該判定の時点の時刻が、記憶部122のメンテナンス情報123に示される複数のメンテナンスそれぞれの予備期間に含まれているか否かが判定される。
【0101】
例えば、当該判定の時点の時刻が13:58であれば、当該搬送要求の実行開始時刻は予備期間内であると判定される(S10でYes、図5Aまたは図5B参照)。
【0102】
判定部125は、当該搬送要求の実行開始時刻は予備期間内であると判定した場合、当該搬送要求に示される目的地が、メンテナンス区間内、つまり、進入禁止区間内であるか否かを判定する(S11)。
【0103】
例えば、当該目的地が図4に示すように第2ベイの処理装置βである場合、当該目的地は進入禁止区間内であると判定される(S11でYes)。
【0104】
判定部125は、当該目的地は進入禁止区間内であると判定した場合、本実施の形態では、到着予定時刻が当該メンテナンスの開始時刻よりも前か否かを判定する(S12)。
【0105】
具体的には、当該搬送要求に対応する搬送車200の当該目的地への到着予定時刻が、当該メンテナンスの開始時刻よりも前であるか否かが判定される。
【0106】
なお、この判定には、例えば、搬送コントローラ130から収集される各搬送車200の位置等が参照される。その結果、当該搬送要求に対応する搬送車200として、当該搬送要求に応じて搬送作業を行うと推測される搬送車200(例えば処理装置βまでの時間距離が最も短い搬送車200)が特定される。さらに、当該搬送車200の位置等の情報から到着予定時刻が求められる。
【0107】
この判定の結果、当該到着予定時刻が、当該メンテナンスの開始時刻よりも前ではないと判定された場合(S12でNo)、代替目的地決定部126は、当該搬送要求に示される目的地の代替となる代替目的地を決定する(S13)。
【0108】
本実施の形態においては、目的地としてある処理装置300が指定されており、代替目的地として他の処理装置300が決定される。なお、目的地および代替目的地は処理装置300以外であってもよく、例えば、上述の載置台310等の、搬送対象物の載置場所であってもよい。
【0109】
代替目的地決定部126によって、代替目的地が決定された場合、指令送出部127は、代替目的地を示す情報を含む搬送指令を搬送コントローラ130に向けて送出する(S14)。
【0110】
なお、搬送要求の実行開始時刻が予備期間内でないと判定された場合(S10でNo)、搬送要求の目的地が進入禁止区間内でないと判定された場合(S11でNo)、および、到着予定時刻がメンテナンスの開始時刻よりも前であると判定された場合(S12でYes)は、代替目的地は決定されない。つまり、当該搬送要求に従った搬送指令が指令送出部127から送出される(S14)。
【0111】
ここで、到着予定時刻がメンテナンスの開始時刻(進入禁止措置の開始時刻)よりも前であるか否かの判定(S12)は実行されなくてもよい。
【0112】
つまり、ある搬送要求が、予備期間内において実行の開始が予定され、かつ、目的地が進入禁止区間に含まれている特定搬送要求である場合は、常に、代替目的地が決定されてもよい。こうした場合であっても、搬送車200が、進入禁止区間の手前で停止し、次の指令を待つような無駄な時間の発生は抑制される。
【0113】
以上の処理の流れを中心に、搬送要求の発生から当該搬送要求の実行の完了までを、図8を参照しながら、具体例を用いて説明する。
【0114】
図8は、実施の形態の搬送車システム100における搬送車の制御の一例を示すタイムチャートである。
【0115】
図8に示すように、MES110からMCS120に搬送要求が送信される。ここで、この搬送要求は、例えば、図4に示す内容である場合を想定する。つまり、当該搬送要求に示される目的地が処理装置βである場合を想定する。
【0116】
さらに、MCS120が、当該搬送要求を処理する時点の時刻が13:58である場合を想定する。この場合、当該時刻は、例えば図5Aまたは図5Bに示すメンテナンス情報123を参照すると、処理装置βが配置されている第2ベイのメンテナンスについての予備期間内の時刻である。
【0117】
そのため、MCS120の代替目的地決定部126によって、代替目的地である処理装置γが決定される。なお、処理装置γは、処理装置βと同じ機能を有している処理装置300であり、第3ベイに配置されている処理装置300である(図6参照)。
【0118】
MCS120は、装置αの物品Aを装置γに搬送する旨を示す搬送指令を搬送コントローラ130に送信する。
【0119】
搬送コントローラ130は、当該搬送指令を受信した場合、例えば処理装置αに最も早く到着でき、かつ、物品の搬送が可能な搬送車200を特定し、当該搬送車200に、装置αの物品Aを装置γに搬送する旨の搬送指示を行う。
【0120】
当該搬送指示を受けた搬送車200は、処理装置αに到着後、物品Aを受け取り、処理装置γに向かって走行する。処理装置γに到着した当該搬送車200は、物品Aを処理装置γに渡す。その後、当該搬送車200からの搬送完了報告が搬送コントローラ130およびMCS120を経由し、MES110にまで伝達される。
【0121】
以上のように、本実施の形態の搬送車システム100によれば、事前に予定されている事象(メンテナンス等)に起因して設定される進入禁止区間について、その開始時刻の前の所定の期間内(予備期間内)に実行が開始される搬送要求が、MCS120により特定される。
【0122】
また、特定された搬送要求に示される目的地の代替となる代替目的地が決定され、当該代替目的地を示す搬送指令が搬送コントローラ130に対して送出される。
【0123】
その結果、複数の搬送車200のそれぞれが、進入禁止区間の前で停止して代替目的地の決定を待つような無駄な時間の発生が抑制される。
【0124】
なお、本実施の形態では、搬送要求が、目的地への物品の搬送を示す要求である場合の処理について説明した(図4参照)。
【0125】
しかしながら、本実施の形態の搬送車システム100は、搬送要求が、目的地からの物品の搬出である場合についても同様に、効率的な搬送作業を実現することができる。
【0126】
ここで、ある場所から他の場所への搬送車200の移動を伴う要求を、例えば、From−To要求と表現する。この場合、“From”に対応する場所および“To”に対応する場所のいずれが目的地として扱われた場合であっても、本実施の形態の搬送車システム100は適切な処理を行うことができる。
【0127】
図9は、実施の形態におけるMCS120の処理の流れの別の一例を示すフロー図である。
【0128】
MCS120の通信部121が、MES110から、目的地からの物品の搬出を示す搬送要求を受け取ると、判定部125は、当該搬送要求の実行開始時刻が予備期間内であるか否かを判定する(S20)。
【0129】
例えば、その時点の時刻が13:58であれば、当該搬送要求の実行開始時刻は予備期間内であると判定される(S20でYes、図5Aまたは図5B参照)。
【0130】
判定部125は、当該搬送要求の実行開始時刻は予備期間内であると判定した場合、当該搬送要求に示される目的地が、メンテナンス区間内、つまり、進入禁止区間内であるか否かを判定する(S21)。
【0131】
例えば、当該搬送要求が第2ベイの処理装置βからの物品の搬出を示す場合、当該目的地は進入禁止区間内であると判定される(S21でYes)。
【0132】
判定部125は、当該目的地は進入禁止区間内であると判定した場合、到着予定時刻が、当該メンテナンスの開始時刻よりも後か否かを判定する(S22)。
【0133】
具体的には、当該搬送要求に対応する搬送車200の当該目的地への到着予定時刻が、当該メンテナンスの開始時刻よりも後であるか否かが判定される。
【0134】
なお、当該搬送要求に対応する搬送車200の特定には、図7についての説明で記載された手法が採用される。
【0135】
上記判定の結果、当該到着予定時刻が、当該メンテナンスの開始時刻よりも後であると判定された場合(S22でYes)、通信部121は、当該搬送要求が実行不可である旨を、当該搬送要求の送信元の装置であるMES110に報告する。
【0136】
MES110は、当該搬送要求が実行不可である旨が報告された場合、例えば、当該搬送要求を所定の期間保持した後に再びMCS120に送信する。
【0137】
また、搬送要求の実行開始時刻が予備期間内でないと判定された場合(S20でNo)、搬送要求の目的地が進入禁止区間内でないと判定された場合(S21でNo)、および、到着予定時刻がメンテナンスの開始時刻よりも後ではないと判定された場合(S22でNo)は、当該搬送要求に従った搬送指令が指令送出部127から送出される(S24)。
【0138】
ここで、従来の搬送車システムであれば、目的地からの物品の搬出要求を実行しようとする搬送車は、当該目的地が進入禁止区間に含まれる位置にある場合、進入禁止区間の手前までと到達した段階で、当該搬送要求の実行が不可である旨を上位のコントローラに報告する。その結果、当該搬送車は、次の指示が上位のコントローラからあるまで進入禁止区間の手前で停止した状態が継続することになる。
【0139】
しかし、本実施の形態における搬送車システム100であれば、予定されている事象(メンテナンス等)に起因して進入禁止区間が設定されることにより、結果として実行不可能となる搬送要求については、事前に実行不可であることが判断される。
【0140】
その結果、物品の搬出を行おうとする搬送車200が、進入禁止区間の手前で、次の指示があるまで停止するような無駄な時間の発生が抑制される。
【0141】
以上、本発明の搬送車システムについて、実施の形態に基づいて説明した。しかしながら、本発明は、本実施の形態に限定されるものではない。本発明の趣旨を逸脱しない限り、当業者が思いつく各種変形を本実施の形態に施したものも、あるいは、上記説明された複数の構成要素を組み合わせて構築される形態も、本発明の範囲内に含まれる。
【0142】
例えば、MCS120が受信し処理する搬送要求の形式は図4に示す形式以外であってもよい。例えば、複数の物品それぞれの存在位置をMCS120が確認可能である場合、搬送要求には搬送すべき物品の情報のみが含まれ、エリアについての情報が含まれていなくてもよい。
【0143】
また、搬送車システム100が備える複数の搬送車200は天井走行車であるとした。
【0144】
しかしながら、搬送車システム100は、天井走行車ではなく他の種類の搬送車を複数備えこれら搬送車を移動制御の対象としてもよい。
【0145】
例えば、倉庫または工場等の内部で床上を走行し物品の搬送を行う無人搬送車を、搬送車200として搬送車システム100が備えてもよい。つまり、経路140はレールによって形成されている必要はなく、搬送車200が走行可能な路面によって経路140が形成されていてもよい。
【0146】
また、MCS120は、本発明に係るコントローラを実現する装置の一例として説明したが、例えば、他の装置によって、本発明に係るコントローラが実現されてもよい。
【0147】
例えば、搬送コントローラ130が、図3に示す判定部125等を備えることで、本発明に係るコントローラが実行する処理を実行してもよい。
【0148】
また、MCS120の判定部125は、メンテナンスの終了時刻を考慮して、搬送要求が特定搬送要求であるか否かを判定してもよい。
【0149】
判定部125は、例えば、搬送車200の到着予定時刻がメンテナンスの開始時刻よりも前であるとの判定(図7のS12でNo)を行った後に、当該搬送車200が目的地から出発する予定時刻と、当該メンテナンスの終了時刻との比較を行ってもよい。
【0150】
つまり、当該搬送車200が、進入禁止措置の開始の前に目的地に到着することが予測されるが、当該搬送車200が例えば目的地で物品を受け取った後に出発する時点では、進入禁止措置が開始されていると予測される場合、当該搬送要求が特定搬送要求であると判定してもよい。すなわち、この場合、代替目的地が決定されてもよい。
【0151】
こうすることで、例えば、複数の搬送要求のそれぞれに対する、そのまま実行すべきか否かの判定が、より精度よく実行される。
【0152】
また、予備期間は、本実施の形態では、例えば当該工場内において、当該対象区間への到達に要する最大時間が予備期間として設定されるとした。しかし、当該最大時間に、搬送車200による物品の移載作業に要する時間等のマージンを加えた値が予備期間として設定されてもよい。つまり、予備期間がより長く設定されてもよい。言い換えると、予備期間の開始時刻がより早く設定されてもよい。
【0153】
この場合、例えば、搬送要求が特定搬送要求であるか否かの判定にメンテナンスの終了時刻が考慮された場合と同様の効果が得られる。
【0154】
つまり、あるメンテナンスについて、予備期間の開始時刻が早く設定されると、当該メンテナンス区間(進入禁止区間)への到着予定時刻がメンテナンスの開始時刻に比較的近いと予測される搬送要求は排除される。
【0155】
簡単に言うと、メンテナンスの開始時刻に対して余裕のある搬送要求のみがそのまま実行され、この場合は、メンテナンス区間内の目的地に到着した搬送車200が、メンテナンスの開始時刻の前に物品の積み込み等を終えて目的地から出発する可能性が高くなる。
【0156】
このように、予備期間の長さ、または、予備期間の開始時刻を、搬送車200による物品の移載作業に要する時間または目的地である処理装置300における処理の所要時間等を考慮して決定してもよい。これにより、例えば、搬送車システム100における搬送作業の効率をより向上させることが可能となる。
【産業上の利用可能性】
【0157】
本発明の搬送車システムでは、経路上に進入禁止区間が設けられた場合であっても、効率的な搬送作業が可能である。そのため、搬送車を用いて様々な種類の物品を所定の領域内で搬送するシステム等として有用である。
【符号の説明】
【0158】
100 搬送車システム
110 MES
120 MCS
121 通信部
122 記憶部
123 メンテナンス情報
125 判定部
126 代替目的地決定部
127 指令送出部
130 搬送コントローラ
140 経路
200 搬送車
240 保持部
300 処理装置
310 載置台
【特許請求の範囲】
【請求項1】
複数の処理装置に沿って設けられた経路と、前記経路に沿って走行する複数の搬送車と、前記複数の搬送車の制御を行うコントローラとを備える搬送車システムであって、
前記コントローラは、
前記複数の搬送車のうちの一つの搬送車を前記経路上の目的地に向かわせる必要の生じる搬送要求を受信する通信部と、
進入禁止の措置が所定の期間なされる予定の前記経路の一部の区間である進入禁止区間を示す区間情報、および、前記進入禁止の措置が開始される予定の開始時刻よりも前の所定の時刻から前記開始時刻までの期間である予備期間を示す予備期間情報を記憶する記憶部と、
前記通信部により受信された搬送要求が、前記予備期間情報に示される予備期間内において実行の開始が予定され、かつ、前記目的地が前記区間情報に示される進入禁止区間に含まれている特定搬送要求であるか否かを判定する判定部と、
前記判定部により前記搬送要求が特定搬送要求であると判定された場合、前記目的地の代わりとなる代替目的地であって、前記進入禁止区間に含まれない前記経路上の代替目的地を決定する代替目的地決定部と、
前記代替目的地決定部により決定された代替目的地に、前記複数の搬送車のうちのいずれかの搬送車を向かわせるための搬送指令を送出する指令送出部と
を備える搬送車システム。
【請求項2】
前記判定部は、前記通信部により受信された搬送要求が、前記予備期間内において実行の開始が予定され、かつ、前記目的地が前記進入禁止区間に含まれている場合であっても、前記搬送要求に対応する搬送車の前記目的地への到着予定時刻が、前記開始時刻よりも前である場合は、前記搬送要求を前記特定搬送要求と判定せず、
前記指令送出部は、前記目的地に、前記複数の搬送車のうちのいずれかの搬送車を向かわせるための搬送指令を送出する
請求項1記載の搬送車システム。
【請求項3】
前記判定部はさらに、前記通信部により受信された搬送要求が、前記予備期間情報に示される予備期間内において実行の開始が予定され、前記目的地が前記区間情報に示される進入禁止区間に含まれており、前記目的地からの物品の搬出の要求を示し、かつ、前記搬送要求に対応する搬送車の前記目的地への到着予定時刻が、前記開始時刻よりも後である場合は、前記搬送要求を実行不可と判定し、
前記通信部はさらに、前記搬送要求の送信元の装置に、前記搬送要求が実行不可である旨を報告する
請求項1または2記載の搬送車システム。
【請求項1】
複数の処理装置に沿って設けられた経路と、前記経路に沿って走行する複数の搬送車と、前記複数の搬送車の制御を行うコントローラとを備える搬送車システムであって、
前記コントローラは、
前記複数の搬送車のうちの一つの搬送車を前記経路上の目的地に向かわせる必要の生じる搬送要求を受信する通信部と、
進入禁止の措置が所定の期間なされる予定の前記経路の一部の区間である進入禁止区間を示す区間情報、および、前記進入禁止の措置が開始される予定の開始時刻よりも前の所定の時刻から前記開始時刻までの期間である予備期間を示す予備期間情報を記憶する記憶部と、
前記通信部により受信された搬送要求が、前記予備期間情報に示される予備期間内において実行の開始が予定され、かつ、前記目的地が前記区間情報に示される進入禁止区間に含まれている特定搬送要求であるか否かを判定する判定部と、
前記判定部により前記搬送要求が特定搬送要求であると判定された場合、前記目的地の代わりとなる代替目的地であって、前記進入禁止区間に含まれない前記経路上の代替目的地を決定する代替目的地決定部と、
前記代替目的地決定部により決定された代替目的地に、前記複数の搬送車のうちのいずれかの搬送車を向かわせるための搬送指令を送出する指令送出部と
を備える搬送車システム。
【請求項2】
前記判定部は、前記通信部により受信された搬送要求が、前記予備期間内において実行の開始が予定され、かつ、前記目的地が前記進入禁止区間に含まれている場合であっても、前記搬送要求に対応する搬送車の前記目的地への到着予定時刻が、前記開始時刻よりも前である場合は、前記搬送要求を前記特定搬送要求と判定せず、
前記指令送出部は、前記目的地に、前記複数の搬送車のうちのいずれかの搬送車を向かわせるための搬送指令を送出する
請求項1記載の搬送車システム。
【請求項3】
前記判定部はさらに、前記通信部により受信された搬送要求が、前記予備期間情報に示される予備期間内において実行の開始が予定され、前記目的地が前記区間情報に示される進入禁止区間に含まれており、前記目的地からの物品の搬出の要求を示し、かつ、前記搬送要求に対応する搬送車の前記目的地への到着予定時刻が、前記開始時刻よりも後である場合は、前記搬送要求を実行不可と判定し、
前記通信部はさらに、前記搬送要求の送信元の装置に、前記搬送要求が実行不可である旨を報告する
請求項1または2記載の搬送車システム。
【図1】


【図2】
【図3】
【図4】

【図5A】
【図5B】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5A】
【図5B】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−88987(P2013−88987A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−228325(P2011−228325)
【出願日】平成23年10月17日(2011.10.17)
【出願人】(000006297)村田機械株式会社 (4,916)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月17日(2011.10.17)
【出願人】(000006297)村田機械株式会社 (4,916)
【Fターム(参考)】
[ Back to top ]