
搬送車
【課題】搬送車が他の装置からの信号に依存することなく荷物搬出時の移載装置の動作を自律的に止める。
【解決手段】荷物210を搬送する搬送車100であって、他の装置との間で荷物210を搬出入するコンベア式の移載装置101と、移載装置101の搬出入を制御する制御装置102と、移載装置101の所定箇所における荷物210の有無を検出する荷検出器103とを備え、制御装置102は、移載装置101を用いて荷物210を搬入する際に、荷検出器103を用いて検出される荷物210の搬出入方向における長さを示す搬入情報を取得する搬入情報取得部121と、移載装置101を用いて荷物210を搬出する際に、搬入情報を用いて移載装置101の搬出動作を停止させる搬出動作停止部122とを備える。
【解決手段】荷物210を搬送する搬送車100であって、他の装置との間で荷物210を搬出入するコンベア式の移載装置101と、移載装置101の搬出入を制御する制御装置102と、移載装置101の所定箇所における荷物210の有無を検出する荷検出器103とを備え、制御装置102は、移載装置101を用いて荷物210を搬入する際に、荷検出器103を用いて検出される荷物210の搬出入方向における長さを示す搬入情報を取得する搬入情報取得部121と、移載装置101を用いて荷物210を搬出する際に、搬入情報を用いて移載装置101の搬出動作を停止させる搬出動作停止部122とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本願発明は荷物を搬送する搬送車に関し、特に他の装置(設備)との間で荷物を移載することのできる移載装置を備える搬送車に関する。
【背景技術】
【0002】
従来、所定の場所に設置される装置等から自動的に荷物を受け取り他の場所に設置される装置に当該荷物を無人で搬送する搬送車がある。
【0003】
例えば特許文献1には、移載装置を搭載し自ら荷物を移載する搬送車に関する発明が記載されている。このような搬送車では、荷物を移載するに際しては、移載対象の装置と信号のやりとりをし、荷物が移載されたことを相互に確認した後、移載装置の動作を停止させている。
【0004】
具体的に例えば、搬送車から他の装置に荷物を搬出する場合、他の装置が荷物を受け取った旨を示す信号を搬送車が受け取ると、移載装置の動作を停止するという制御が行われている。これは、搬送車と他の装置との間に跨がった状態で荷物が止まり、当該状態で搬送車が発車してしまうなどの不具合を回避するためである。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平5−155419号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところが、他の装置によっては、荷物を受け取った旨を示す信号の送信タイミングが遅い装置がある。このような装置の場合、実際には荷物が他の装置に移載されたにもかかわらず、他の装置から前記信号が送られてくるまでは、移載装置の動作を停止させることができない。また、他の装置の不具合によって前記信号を受信することができない場合、移載装置を動作させ続けることとなる。特に移載装置がローラー式やベルト式などのコンベアである場合、前記信号を受信するまではコンベアを駆動させ続けることとなり、エネルギーの無駄となっている。
【0007】
本願発明は上記課題に鑑みなされたものであり、荷物の搬出が完了したことを自律的に判断し、搭載する移載装置の動作を停止させることのできる搬送車の提供を目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本願発明にかかる搬送車は、荷物を搬送する搬送車であって、他の装置との間で荷物を搬出入するコンベア式の移載装置と、前記移載装置による荷物の搬出入を制御する制御装置と、前記移載装置の所定箇所における荷物の有無を検出する荷検出器とを備え、前記制御装置は、前記移載装置を用いて荷物を搬入する際に、前記荷検出器を用いて検出される前記荷物の搬出入方向における長さを示す搬入情報を取得する搬入情報取得部と、前記移載装置を用いて前記荷物を搬出する際に、前記搬入情報を用いて前記移載装置の搬出動作を停止させる搬出動作停止部とを備えることを特徴とする。
【0009】
これにより、搬送車自らが取得した搬入情報に基づき搬送車自らが荷物の搬出完了を判断して移載装置を停止させることが可能となる。従って、荷物を移載する相手方である他の装置の状態にかかわらず、移載装置を停止させることができ、エネルギーの消費量を削減することが可能となる。
【0010】
さらに、搬入情報に基づき移載装置を停止させるため、搬送する荷物の大きさにも柔軟に対応して移載装置を停止させることができる。
【0011】
前記制御装置はさらに、前記搬出動作停止部が前記移載装置の搬出動作を停止させた後、前記荷検出器の検出結果から前記移載装置の前記所定箇所において荷物がないことを確認した場合、当該搬送車の移動を許可する移動判断部を備えてもよい。
【0012】
これによれば、コンベアと荷物とのスリップ等により移載装置が正常に荷物を搬出できないにもかかわらず搬送車が移動を開始し、荷物が破損するなどの不具合を回避することが可能となる。
【0013】
また、前記荷検出器は、移載装置の搬送方向の端部における荷物の有無を検出するものであり、前記制御装置はさらに、当該搬送車が移動している際、前記荷検出器の検出結果から前記移載装置の前記所定箇所において荷物があることを確認した場合、異常を報知する異常報知部を備えてもかまわない。
【0014】
これにより、荷物搬出後に自律的に移載装置を停止させるための荷検出器を用いて、荷物を搬送中の不具合、いわゆる荷ずれや荷崩れなどを検知して異常を報知することができ、搬送車に搭載する部品点数を削減することができる。従って、搬送車を製造する工程が削減でき搬送車製造時の消費エネルギーを削減することが可能となる。
【0015】
なお、前記制御装置の各処理部を実現するためにコンピュータに実行させるためのプログラムを実施することも本願発明の実施に該当する。無論、そのプログラムが記録された記録媒体を実施することも本願発明の実施に該当する。
【発明の効果】
【0016】
本願発明は、搬送車が自律的に荷物の搬出を判断して移載装置の動作を停止させることができ、無駄なエネルギーの消費を抑制することが可能となる。
【図面の簡単な説明】
【0017】
【図1】図1は、搬送車を備える搬送システムを模式的に示す平面図である。
【図2】図2は、搬送車を模式的に示す平面図である。
【図3】図3は、搬送車の機能構成を示すブロック図である。
【図4】図4は、荷物を搬入する際の処理、および、動作の流れを示すフローチャートである。
【図5】図5は、搬入処理中の荷物と移載装置との関係を示す平面図である。
【図6】図6は、搬入処理中の荷物と移載装置との関係を示す平面図である。
【図7】図7は、荷物を搬送する際の処理、および、動作の流れを示すフローチャートである。
【図8】図8は、荷物を搬出する際の処理、および、動作の流れを示すフローチャートである。
【図9】図9は、搬出処理中の荷物と移載装置との関係を示す平面図である。
【図10】図10は、搬出処理終了時の荷物と移載装置との関係を示す平面図である。
【図11】図11は、搬出処理が異常状態で終了した際の荷物と移載装置との関係を示す平面図である。
【発明を実施するための形態】
【0018】
次に、本願発明に係る搬送車の実施の形態について、図面を参照しつつ説明する。なお、以下の実施の形態は、本願発明に係る搬送車の一例を示したものに過ぎない。従って本願発明は、以下の実施の形態を参考に請求の範囲の文言によって範囲が画定されるものであり、以下の実施の形態のみに限定されるものではない。
【0019】
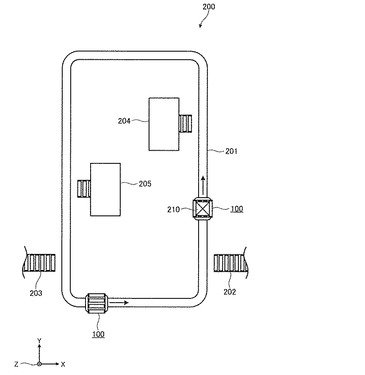
図1は、搬送車を備える搬送システムを模式的に示す平面図である。
【0020】
同図に示す搬送システム200は、搬送車100と、搬送車100の軌道を形成するレール201と、他の装置である搬入装置202、および、搬出装置203を備えている。また、搬送システム200の側方には、荷物に対して処理を行う他の装置である第一処理装置204、および、第二処理装置205とを備えている。
【0021】
搬送システム200は、搬入装置202から荷物210を受け取った搬送車100が、荷物210を第一処理装置204や第二処理装置205に搬送し、処理が終了した荷物210を搬出装置203に搬出するシステムである。本実施の形態の場合、搬送システム200は、複数台の搬送車100を備え、搬送車100は、荷物210を他の装置との間で自動的に移載し、荷物210を自動的に搬送している。
【0022】
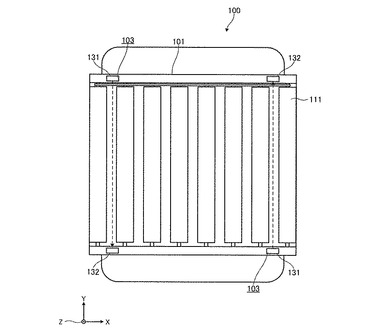
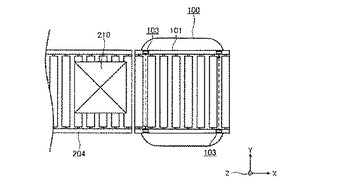
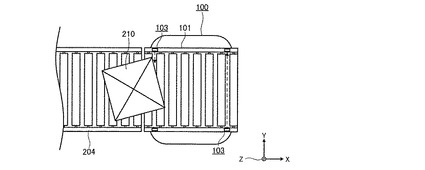
図2は、搬送車を模式的に示す平面図である。
【0023】
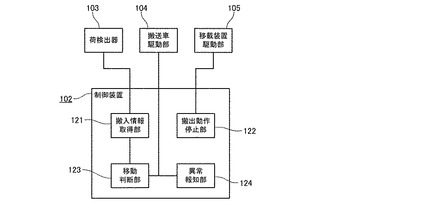
図3は、搬送車の機能構成を示すブロック図である。
【0024】
これらの図に示すように、搬送車100は、荷物を搬送する台車であって、移載装置101と、制御装置102と、荷検出器103とを備えている。また、搬送車100は、底部に図示しない駆動輪と、この駆動輪を駆動するモータ等からなる搬送車駆動部104と、移載装置101を駆動するモータなどからなる移載装置駆動部105とを備えている。
【0025】
移載装置101は、他の装置との間で荷物210を搬出入するコンベアである。本実施の形態の場合、移載装置101は、ローラコンベアである。移載装置101は、移載装置駆動部105に連結されて正逆回転自在に駆動されるローラ111を複数本並べた状態で備えている。移載装置101は、ローラ111を駆動することにより、載置された荷物210を搬送車100外に搬出することができ、また、荷物210の端部が移載装置101に掛かれば、ローラ111を搬出とは逆向きに駆動することにより搬送車100内に搬入することができる。
【0026】
なお、移載装置101としては、ローラコンベアばかりでなく、ベルトコンベアやチェーンコンベアなど任意のコンベアを採用しうる。
【0027】
荷検出器103は、移載装置101の所定箇所における荷物210の有無を検出するセンサである。本実施の形態の場合、荷検出器103は、投光器131と受光器132とを備え、受光器132が投光器131の光を受光するか否かによって投光器131と受光器との間の荷物210の有無を示す情報を創出する。また、荷検出器103は、移載装置の搬送方向(図2中X軸方向)の両端部にそれぞれ配置されている。
【0028】
なお、荷検出器103は、光透過型のセンサばかりでなく、荷物210からの光の反射に基づき荷物210の有無を検出する反射型のセンサでもよい。さらに、荷検出器103は、音波や電波を用いたセンサ、荷物210が発信する情報を取得することにより荷物210の有無を検出するセンサでもかまわない。
【0029】
また、荷検出器103は、移載装置101の端縁ぎりぎりに配置するものでもよい。このように配置することで移載装置101から荷物210が突出していることを検出することができ、搬送車100が移動する際に荷物210が他の設備などと接触することを防止することができる。
【0030】
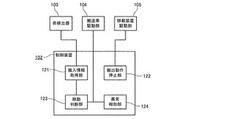
制御装置102は、移載装置101の搬出入を制御する装置であり、例えばソフトウエアに基づき各処理を実行するコンピュータである。制御装置102は、搬入情報取得部121と、搬出動作停止部122とを備え、さらに、移動判断部123と、異常報知部124とを備えている。
【0031】
搬入情報取得部121は、移載装置101を用いて荷物210を搬入する際に、荷検出器103を用いて検出される荷物210の搬出入方向における長さを示す搬入情報を取得する処理部である。ここで、荷物210の搬出入方向における長さとは、荷物210の実際の長さばかりでなく、荷物210の搬入に要した時間や、荷物210の搬入に要した移載装置101の駆動距離でもよい。
【0032】
本実施の形態の場合、搬入情報取得部121は、タイマー等から時間情報に基づき、荷検出器103が荷物210が有ることを検出し始めてから荷物210がないと検出するまでの時間を搬入情報として取得する。
【0033】
なお、搬入情報取得部121は、移載装置101が備えるエンコーダなどから移載装置101の駆動距離情報を取得し、移載装置101が駆動を開始してから荷検出器103が荷物210が有ることを検出し、さらに、荷物210がないと検出するまでの駆動距離を搬入情報としてもよい。
【0034】
搬出動作停止部122は、移載装置101を用いて荷物210を搬出する際に、搬入情報を用いて移載装置101の搬出動作を停止させる処理部である。
【0035】
例えば搬入情報が時間であった場合、搬出動作停止部122は、タイマー等から時間情報に基づき、荷検出器103が荷物210が有ることを検出し始めてから搬入情報にマージンとしての付加時間を足した時間経過後、移載装置駆動部105に対し駆動を停止する情報を送信し搬出動作を停止させればよい。
【0036】
なお、搬入情報が移載距離であった場合、搬出動作停止部122は、移載装置101が備えるエンコーダなどから移載装置101の駆動距離情報を取得し、移載装置101が駆動を開始してから搬入情報にマージンとしての付加距離を足した駆動距離分移載装置101を駆動させた後、移載装置駆動部105に対し駆動を停止する情報を送信し搬出動作を停止させてもよい。
【0037】
移動判断部123は、搬出動作停止部122が移載装置101の搬出動作を停止させた後、荷検出器103の検出結果から移載装置101において荷物210がないことを確認した場合、搬送車駆動部104に対し搬送車100の移動を許可する情報を送信する処理部である。
【0038】
異常報知部124は、搬送車100が移動している際、荷検出器103の検出結果から移載装置101において荷物210があることを確認した場合、異常を報知する処理部である。
【0039】
次に、搬送車100の処理、および、動作の流れの一例を説明する。
【0040】
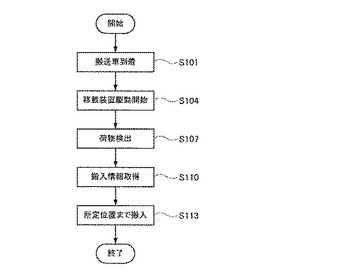
図4は、荷物を搬入する際の処理、および、動作の流れを示すフローチャートである。
【0041】
搬送車100が搬入装置202に到着し(S101)、移載装置101の駆動を開始する(S104)。
【0042】
移載装置101が駆動すると、荷物210が搬送車100側に搬入されはじめ、荷物210と荷検出器103との関係が図5に示す状態になると、荷検出器103が、荷物210が所定箇所にあることを検出する(S107)。
【0043】
荷検出器103が荷物210を検出すると同時に、搬入情報取得部121は、時間の計測を開始する。そして、荷物210の搬入動作が継続され、荷物210と荷検出器103との関係が図6に示す状態、すなわち荷検出器103が、荷物210が所定箇所にないことを検出するまでの時間を搬入情報取得部121は、搬入情報として取得し(S110)、記憶する。
【0044】
最後に、移載装置101は所定の位置まで荷物210を搬入し(S113)、搬入処理を終了する。
【0045】
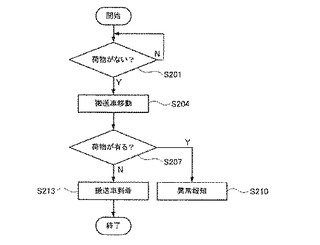
図7は、荷物を搬送する際の処理、および、動作の流れを示すフローチャートである。
【0046】
移載装置101による搬入処理が終了した後、荷検出器103の検出結果から移載装置101の所定箇所において荷物210がないことを確認した場合、移動判断部123は、搬送車100の移動を許可する(S201)。
【0047】
移動が許可され、その他条件が整うと荷物210を搭載した搬送車100は、移動を開始する(S204)。
【0048】
搬送車100が移動している際、荷検出器103の検出結果から移載装置101の所定箇所において荷物があることを確認した場合、異常報知部124は、異常を報知する(S210)。この場合、搬送車100を停止させてもよい。
【0049】
異常がなければ、搬送車100は、移動を続け目的の他の装置(例えば第一処理装置204)に到着する(S213)。
【0050】
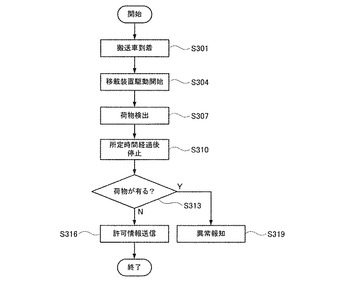
図8は、荷物を搬出する際の処理、および、動作の流れを示すフローチャートである。
【0051】
搬送車100が第一処理装置204に到着し(S301)、移載装置101の駆動を開始する(S304)。
【0052】
移載装置101が駆動すると、荷物210が第一処理装置204側に搬出されはじめ、荷物210と荷検出器103との関係が図9に示す状態になると、荷検出器103が、荷物210が所定箇所にあることを検出する(S307)。
【0053】
荷検出器103が荷物210を検出すると同時に、搬出動作停止部122は、時間の計測を開始する。そして、先に取得した搬入情報に所定の時間を足した時間だけ荷物210の搬出動作を継続し、移載装置101の動作を停止させる(S310)。
【0054】
以上により荷物210が図10に示す状態、すなわち荷物210が、第一処理装置204に移載される。
【0055】
最後に、荷検出器103の検出結果から移載装置101において荷物210がないことを確認した場合(S313:N)、移動判断部123は、搬送車駆動部104に対し搬送車100の移動を許可する情報を送信する。
【0056】
また、荷検出器103の検出結果から移載装置101において荷物210があることを確認した場合(S313:Y)、異常を報知する(S319)。
【0057】
これにより、図11に示すように、荷物210が移載装置101と他の装置(第一処理装置204)との間で跨がった状態のまま搬送車100が移動してしまうことを回避できる。
【0058】
なお、本願発明は、上記実施の形態に限定されるものではない。例えば、本明細書において記載した構成要素を任意に組み合わせて、また、構成要素のいくつかを除外して実現される別の実施の形態を本願発明の実施の形態としてもよい。また、上記実施の形態に対して本願発明の主旨、すなわち、請求の範囲に記載される文言が示す意味を逸脱しない範囲で当業者が思いつく各種変形を施して得られる変形例も本願発明に含まれる。
【産業上の利用可能性】
【0059】
本願発明は、軌条に沿って走行する搬送車や、無軌条の床面を自走する搬送車など、工場内などにおいて無人で荷物を搬送する搬送車に利用可能である。
【符号の説明】
【0060】
100 搬送車
101 移載装置
102 制御装置
103 荷検出器
104 搬送車駆動部
105 移載装置駆動部
111 ローラ
121 搬入情報取得部
122 搬出動作停止部
123 移動判断部
124 異常報知部
131 投光器
132 受光器
200 搬送システム
201 レール
202 搬入装置
203 搬出装置
204 第一処理装置
205 第二処理装置
210 荷物
【技術分野】
【0001】
本願発明は荷物を搬送する搬送車に関し、特に他の装置(設備)との間で荷物を移載することのできる移載装置を備える搬送車に関する。
【背景技術】
【0002】
従来、所定の場所に設置される装置等から自動的に荷物を受け取り他の場所に設置される装置に当該荷物を無人で搬送する搬送車がある。
【0003】
例えば特許文献1には、移載装置を搭載し自ら荷物を移載する搬送車に関する発明が記載されている。このような搬送車では、荷物を移載するに際しては、移載対象の装置と信号のやりとりをし、荷物が移載されたことを相互に確認した後、移載装置の動作を停止させている。
【0004】
具体的に例えば、搬送車から他の装置に荷物を搬出する場合、他の装置が荷物を受け取った旨を示す信号を搬送車が受け取ると、移載装置の動作を停止するという制御が行われている。これは、搬送車と他の装置との間に跨がった状態で荷物が止まり、当該状態で搬送車が発車してしまうなどの不具合を回避するためである。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平5−155419号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところが、他の装置によっては、荷物を受け取った旨を示す信号の送信タイミングが遅い装置がある。このような装置の場合、実際には荷物が他の装置に移載されたにもかかわらず、他の装置から前記信号が送られてくるまでは、移載装置の動作を停止させることができない。また、他の装置の不具合によって前記信号を受信することができない場合、移載装置を動作させ続けることとなる。特に移載装置がローラー式やベルト式などのコンベアである場合、前記信号を受信するまではコンベアを駆動させ続けることとなり、エネルギーの無駄となっている。
【0007】
本願発明は上記課題に鑑みなされたものであり、荷物の搬出が完了したことを自律的に判断し、搭載する移載装置の動作を停止させることのできる搬送車の提供を目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本願発明にかかる搬送車は、荷物を搬送する搬送車であって、他の装置との間で荷物を搬出入するコンベア式の移載装置と、前記移載装置による荷物の搬出入を制御する制御装置と、前記移載装置の所定箇所における荷物の有無を検出する荷検出器とを備え、前記制御装置は、前記移載装置を用いて荷物を搬入する際に、前記荷検出器を用いて検出される前記荷物の搬出入方向における長さを示す搬入情報を取得する搬入情報取得部と、前記移載装置を用いて前記荷物を搬出する際に、前記搬入情報を用いて前記移載装置の搬出動作を停止させる搬出動作停止部とを備えることを特徴とする。
【0009】
これにより、搬送車自らが取得した搬入情報に基づき搬送車自らが荷物の搬出完了を判断して移載装置を停止させることが可能となる。従って、荷物を移載する相手方である他の装置の状態にかかわらず、移載装置を停止させることができ、エネルギーの消費量を削減することが可能となる。
【0010】
さらに、搬入情報に基づき移載装置を停止させるため、搬送する荷物の大きさにも柔軟に対応して移載装置を停止させることができる。
【0011】
前記制御装置はさらに、前記搬出動作停止部が前記移載装置の搬出動作を停止させた後、前記荷検出器の検出結果から前記移載装置の前記所定箇所において荷物がないことを確認した場合、当該搬送車の移動を許可する移動判断部を備えてもよい。
【0012】
これによれば、コンベアと荷物とのスリップ等により移載装置が正常に荷物を搬出できないにもかかわらず搬送車が移動を開始し、荷物が破損するなどの不具合を回避することが可能となる。
【0013】
また、前記荷検出器は、移載装置の搬送方向の端部における荷物の有無を検出するものであり、前記制御装置はさらに、当該搬送車が移動している際、前記荷検出器の検出結果から前記移載装置の前記所定箇所において荷物があることを確認した場合、異常を報知する異常報知部を備えてもかまわない。
【0014】
これにより、荷物搬出後に自律的に移載装置を停止させるための荷検出器を用いて、荷物を搬送中の不具合、いわゆる荷ずれや荷崩れなどを検知して異常を報知することができ、搬送車に搭載する部品点数を削減することができる。従って、搬送車を製造する工程が削減でき搬送車製造時の消費エネルギーを削減することが可能となる。
【0015】
なお、前記制御装置の各処理部を実現するためにコンピュータに実行させるためのプログラムを実施することも本願発明の実施に該当する。無論、そのプログラムが記録された記録媒体を実施することも本願発明の実施に該当する。
【発明の効果】
【0016】
本願発明は、搬送車が自律的に荷物の搬出を判断して移載装置の動作を停止させることができ、無駄なエネルギーの消費を抑制することが可能となる。
【図面の簡単な説明】
【0017】
【図1】図1は、搬送車を備える搬送システムを模式的に示す平面図である。
【図2】図2は、搬送車を模式的に示す平面図である。
【図3】図3は、搬送車の機能構成を示すブロック図である。
【図4】図4は、荷物を搬入する際の処理、および、動作の流れを示すフローチャートである。
【図5】図5は、搬入処理中の荷物と移載装置との関係を示す平面図である。
【図6】図6は、搬入処理中の荷物と移載装置との関係を示す平面図である。
【図7】図7は、荷物を搬送する際の処理、および、動作の流れを示すフローチャートである。
【図8】図8は、荷物を搬出する際の処理、および、動作の流れを示すフローチャートである。
【図9】図9は、搬出処理中の荷物と移載装置との関係を示す平面図である。
【図10】図10は、搬出処理終了時の荷物と移載装置との関係を示す平面図である。
【図11】図11は、搬出処理が異常状態で終了した際の荷物と移載装置との関係を示す平面図である。
【発明を実施するための形態】
【0018】
次に、本願発明に係る搬送車の実施の形態について、図面を参照しつつ説明する。なお、以下の実施の形態は、本願発明に係る搬送車の一例を示したものに過ぎない。従って本願発明は、以下の実施の形態を参考に請求の範囲の文言によって範囲が画定されるものであり、以下の実施の形態のみに限定されるものではない。
【0019】
図1は、搬送車を備える搬送システムを模式的に示す平面図である。
【0020】
同図に示す搬送システム200は、搬送車100と、搬送車100の軌道を形成するレール201と、他の装置である搬入装置202、および、搬出装置203を備えている。また、搬送システム200の側方には、荷物に対して処理を行う他の装置である第一処理装置204、および、第二処理装置205とを備えている。
【0021】
搬送システム200は、搬入装置202から荷物210を受け取った搬送車100が、荷物210を第一処理装置204や第二処理装置205に搬送し、処理が終了した荷物210を搬出装置203に搬出するシステムである。本実施の形態の場合、搬送システム200は、複数台の搬送車100を備え、搬送車100は、荷物210を他の装置との間で自動的に移載し、荷物210を自動的に搬送している。
【0022】
図2は、搬送車を模式的に示す平面図である。
【0023】
図3は、搬送車の機能構成を示すブロック図である。
【0024】
これらの図に示すように、搬送車100は、荷物を搬送する台車であって、移載装置101と、制御装置102と、荷検出器103とを備えている。また、搬送車100は、底部に図示しない駆動輪と、この駆動輪を駆動するモータ等からなる搬送車駆動部104と、移載装置101を駆動するモータなどからなる移載装置駆動部105とを備えている。
【0025】
移載装置101は、他の装置との間で荷物210を搬出入するコンベアである。本実施の形態の場合、移載装置101は、ローラコンベアである。移載装置101は、移載装置駆動部105に連結されて正逆回転自在に駆動されるローラ111を複数本並べた状態で備えている。移載装置101は、ローラ111を駆動することにより、載置された荷物210を搬送車100外に搬出することができ、また、荷物210の端部が移載装置101に掛かれば、ローラ111を搬出とは逆向きに駆動することにより搬送車100内に搬入することができる。
【0026】
なお、移載装置101としては、ローラコンベアばかりでなく、ベルトコンベアやチェーンコンベアなど任意のコンベアを採用しうる。
【0027】
荷検出器103は、移載装置101の所定箇所における荷物210の有無を検出するセンサである。本実施の形態の場合、荷検出器103は、投光器131と受光器132とを備え、受光器132が投光器131の光を受光するか否かによって投光器131と受光器との間の荷物210の有無を示す情報を創出する。また、荷検出器103は、移載装置の搬送方向(図2中X軸方向)の両端部にそれぞれ配置されている。
【0028】
なお、荷検出器103は、光透過型のセンサばかりでなく、荷物210からの光の反射に基づき荷物210の有無を検出する反射型のセンサでもよい。さらに、荷検出器103は、音波や電波を用いたセンサ、荷物210が発信する情報を取得することにより荷物210の有無を検出するセンサでもかまわない。
【0029】
また、荷検出器103は、移載装置101の端縁ぎりぎりに配置するものでもよい。このように配置することで移載装置101から荷物210が突出していることを検出することができ、搬送車100が移動する際に荷物210が他の設備などと接触することを防止することができる。
【0030】
制御装置102は、移載装置101の搬出入を制御する装置であり、例えばソフトウエアに基づき各処理を実行するコンピュータである。制御装置102は、搬入情報取得部121と、搬出動作停止部122とを備え、さらに、移動判断部123と、異常報知部124とを備えている。
【0031】
搬入情報取得部121は、移載装置101を用いて荷物210を搬入する際に、荷検出器103を用いて検出される荷物210の搬出入方向における長さを示す搬入情報を取得する処理部である。ここで、荷物210の搬出入方向における長さとは、荷物210の実際の長さばかりでなく、荷物210の搬入に要した時間や、荷物210の搬入に要した移載装置101の駆動距離でもよい。
【0032】
本実施の形態の場合、搬入情報取得部121は、タイマー等から時間情報に基づき、荷検出器103が荷物210が有ることを検出し始めてから荷物210がないと検出するまでの時間を搬入情報として取得する。
【0033】
なお、搬入情報取得部121は、移載装置101が備えるエンコーダなどから移載装置101の駆動距離情報を取得し、移載装置101が駆動を開始してから荷検出器103が荷物210が有ることを検出し、さらに、荷物210がないと検出するまでの駆動距離を搬入情報としてもよい。
【0034】
搬出動作停止部122は、移載装置101を用いて荷物210を搬出する際に、搬入情報を用いて移載装置101の搬出動作を停止させる処理部である。
【0035】
例えば搬入情報が時間であった場合、搬出動作停止部122は、タイマー等から時間情報に基づき、荷検出器103が荷物210が有ることを検出し始めてから搬入情報にマージンとしての付加時間を足した時間経過後、移載装置駆動部105に対し駆動を停止する情報を送信し搬出動作を停止させればよい。
【0036】
なお、搬入情報が移載距離であった場合、搬出動作停止部122は、移載装置101が備えるエンコーダなどから移載装置101の駆動距離情報を取得し、移載装置101が駆動を開始してから搬入情報にマージンとしての付加距離を足した駆動距離分移載装置101を駆動させた後、移載装置駆動部105に対し駆動を停止する情報を送信し搬出動作を停止させてもよい。
【0037】
移動判断部123は、搬出動作停止部122が移載装置101の搬出動作を停止させた後、荷検出器103の検出結果から移載装置101において荷物210がないことを確認した場合、搬送車駆動部104に対し搬送車100の移動を許可する情報を送信する処理部である。
【0038】
異常報知部124は、搬送車100が移動している際、荷検出器103の検出結果から移載装置101において荷物210があることを確認した場合、異常を報知する処理部である。
【0039】
次に、搬送車100の処理、および、動作の流れの一例を説明する。
【0040】
図4は、荷物を搬入する際の処理、および、動作の流れを示すフローチャートである。
【0041】
搬送車100が搬入装置202に到着し(S101)、移載装置101の駆動を開始する(S104)。
【0042】
移載装置101が駆動すると、荷物210が搬送車100側に搬入されはじめ、荷物210と荷検出器103との関係が図5に示す状態になると、荷検出器103が、荷物210が所定箇所にあることを検出する(S107)。
【0043】
荷検出器103が荷物210を検出すると同時に、搬入情報取得部121は、時間の計測を開始する。そして、荷物210の搬入動作が継続され、荷物210と荷検出器103との関係が図6に示す状態、すなわち荷検出器103が、荷物210が所定箇所にないことを検出するまでの時間を搬入情報取得部121は、搬入情報として取得し(S110)、記憶する。
【0044】
最後に、移載装置101は所定の位置まで荷物210を搬入し(S113)、搬入処理を終了する。
【0045】
図7は、荷物を搬送する際の処理、および、動作の流れを示すフローチャートである。
【0046】
移載装置101による搬入処理が終了した後、荷検出器103の検出結果から移載装置101の所定箇所において荷物210がないことを確認した場合、移動判断部123は、搬送車100の移動を許可する(S201)。
【0047】
移動が許可され、その他条件が整うと荷物210を搭載した搬送車100は、移動を開始する(S204)。
【0048】
搬送車100が移動している際、荷検出器103の検出結果から移載装置101の所定箇所において荷物があることを確認した場合、異常報知部124は、異常を報知する(S210)。この場合、搬送車100を停止させてもよい。
【0049】
異常がなければ、搬送車100は、移動を続け目的の他の装置(例えば第一処理装置204)に到着する(S213)。
【0050】
図8は、荷物を搬出する際の処理、および、動作の流れを示すフローチャートである。
【0051】
搬送車100が第一処理装置204に到着し(S301)、移載装置101の駆動を開始する(S304)。
【0052】
移載装置101が駆動すると、荷物210が第一処理装置204側に搬出されはじめ、荷物210と荷検出器103との関係が図9に示す状態になると、荷検出器103が、荷物210が所定箇所にあることを検出する(S307)。
【0053】
荷検出器103が荷物210を検出すると同時に、搬出動作停止部122は、時間の計測を開始する。そして、先に取得した搬入情報に所定の時間を足した時間だけ荷物210の搬出動作を継続し、移載装置101の動作を停止させる(S310)。
【0054】
以上により荷物210が図10に示す状態、すなわち荷物210が、第一処理装置204に移載される。
【0055】
最後に、荷検出器103の検出結果から移載装置101において荷物210がないことを確認した場合(S313:N)、移動判断部123は、搬送車駆動部104に対し搬送車100の移動を許可する情報を送信する。
【0056】
また、荷検出器103の検出結果から移載装置101において荷物210があることを確認した場合(S313:Y)、異常を報知する(S319)。
【0057】
これにより、図11に示すように、荷物210が移載装置101と他の装置(第一処理装置204)との間で跨がった状態のまま搬送車100が移動してしまうことを回避できる。
【0058】
なお、本願発明は、上記実施の形態に限定されるものではない。例えば、本明細書において記載した構成要素を任意に組み合わせて、また、構成要素のいくつかを除外して実現される別の実施の形態を本願発明の実施の形態としてもよい。また、上記実施の形態に対して本願発明の主旨、すなわち、請求の範囲に記載される文言が示す意味を逸脱しない範囲で当業者が思いつく各種変形を施して得られる変形例も本願発明に含まれる。
【産業上の利用可能性】
【0059】
本願発明は、軌条に沿って走行する搬送車や、無軌条の床面を自走する搬送車など、工場内などにおいて無人で荷物を搬送する搬送車に利用可能である。
【符号の説明】
【0060】
100 搬送車
101 移載装置
102 制御装置
103 荷検出器
104 搬送車駆動部
105 移載装置駆動部
111 ローラ
121 搬入情報取得部
122 搬出動作停止部
123 移動判断部
124 異常報知部
131 投光器
132 受光器
200 搬送システム
201 レール
202 搬入装置
203 搬出装置
204 第一処理装置
205 第二処理装置
210 荷物
【特許請求の範囲】
【請求項1】
荷物を搬送する搬送車であって、
他の装置との間で荷物を搬出入するコンベア式の移載装置と、
前記移載装置による荷物の搬出入を制御する制御装置と、
前記移載装置の所定箇所における荷物の有無を検出する荷検出器とを備え、
前記制御装置は、
前記移載装置を用いて荷物を搬入する際に、前記荷検出器を用いて検出される前記荷物の搬出入方向における長さを示す搬入情報を取得する搬入情報取得部と、
前記移載装置を用いて前記荷物を搬出する際に、前記搬入情報を用いて前記移載装置の搬出動作を停止させる搬出動作停止部とを備える
搬送車。
【請求項2】
前記制御装置はさらに、
前記搬出動作停止部が前記移載装置の搬出動作を停止させた後、前記荷検出器の検出結果から前記移載装置の前記所定箇所において荷物がないことを確認した場合、当該搬送車の移動を許可する移動判断部を備える
請求項1に記載の搬送車。
【請求項3】
前記荷検出器は、移載装置の搬送方向の端部における荷物の有無を検出するものであり、
前記制御装置はさらに、
当該搬送車が移動している際、前記荷検出器の検出結果から前記移載装置の前記所定箇所において荷物があることを確認した場合、異常を報知する異常報知部を備える
請求項1または2に記載の搬送車。
【請求項1】
荷物を搬送する搬送車であって、
他の装置との間で荷物を搬出入するコンベア式の移載装置と、
前記移載装置による荷物の搬出入を制御する制御装置と、
前記移載装置の所定箇所における荷物の有無を検出する荷検出器とを備え、
前記制御装置は、
前記移載装置を用いて荷物を搬入する際に、前記荷検出器を用いて検出される前記荷物の搬出入方向における長さを示す搬入情報を取得する搬入情報取得部と、
前記移載装置を用いて前記荷物を搬出する際に、前記搬入情報を用いて前記移載装置の搬出動作を停止させる搬出動作停止部とを備える
搬送車。
【請求項2】
前記制御装置はさらに、
前記搬出動作停止部が前記移載装置の搬出動作を停止させた後、前記荷検出器の検出結果から前記移載装置の前記所定箇所において荷物がないことを確認した場合、当該搬送車の移動を許可する移動判断部を備える
請求項1に記載の搬送車。
【請求項3】
前記荷検出器は、移載装置の搬送方向の端部における荷物の有無を検出するものであり、
前記制御装置はさらに、
当該搬送車が移動している際、前記荷検出器の検出結果から前記移載装置の前記所定箇所において荷物があることを確認した場合、異常を報知する異常報知部を備える
請求項1または2に記載の搬送車。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】

【図7】
【図8】
【図9】

【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−95522(P2013−95522A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−236986(P2011−236986)
【出願日】平成23年10月28日(2011.10.28)
【出願人】(000006297)村田機械株式会社 (4,916)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年10月28日(2011.10.28)
【出願人】(000006297)村田機械株式会社 (4,916)
【Fターム(参考)】
[ Back to top ]