
携帯型人工呼吸器システム
【課題】ルーツ型ブロワをコンプレッサとして用いることで、人工呼吸器のサイズおよび消費電力が両方とも低減された携帯型人工呼吸器を提供する。
【解決手段】人工呼吸器の種々の機能上の態様が、専用のコントローラおよびソフトウェアを有する複数サブアセンブリに分担される。専用のコントローラおよびソフトウェアは、人工呼吸器プロセッサとやり取りして、ユーザ・インターフェース機能、呼気制御およびフロー制御サーボ、および患者状態のモニタリングを実現する。人工呼吸器は、ルーツ・ブロワ・ハウジングおよび複数のバッフリング・チャンバに関してノイズ低減圧力補償オリフィスを用いることによって、ノイズ問題を克服する。人工呼吸器は、非常に携帯型のフォームファクタによって構成されており、スタンド・アローンの装置として用いるか、あるいは、拡張されたインターフェースおよびモニタリング能力を伴うドッキング・クレードルを有するドッキングされた装置として用いてもよい。
【解決手段】人工呼吸器の種々の機能上の態様が、専用のコントローラおよびソフトウェアを有する複数サブアセンブリに分担される。専用のコントローラおよびソフトウェアは、人工呼吸器プロセッサとやり取りして、ユーザ・インターフェース機能、呼気制御およびフロー制御サーボ、および患者状態のモニタリングを実現する。人工呼吸器は、ルーツ・ブロワ・ハウジングおよび複数のバッフリング・チャンバに関してノイズ低減圧力補償オリフィスを用いることによって、ノイズ問題を克服する。人工呼吸器は、非常に携帯型のフォームファクタによって構成されており、スタンド・アローンの装置として用いるか、あるいは、拡張されたインターフェースおよびモニタリング能力を伴うドッキング・クレードルを有するドッキングされた装置として用いてもよい。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、医療用人工呼吸器の分野に関し、より具体的には、自給式の携帯型人工呼吸器に関する。
【背景技術】
【0002】
従来、呼吸支援が必要な患者に対する人工呼吸器は、大きく、かつ重く、電力を必要とする装置であった。そのため、このような装置とともに患者が移動することは、まったくできないか、ほとんどできない状態であった。コンプレッサ技術における最近の進歩、たとえば、米国特許第1、152、135号明細書(デブリーズ(DeVries)らに付与)に記載されているものでは、人工呼吸器のサイズおよび電力に対する要求が小さくなり、ある程度の自給式の携帯性が実現できた人工呼吸器の製造が初めて可能になっている。バッテリ・パックを装備することで、これらの携帯型人工呼吸器は、車椅子に取り付けることが可能になった。その結果、患者は、人工呼吸器を主電源に接続することなく、ある程度の時間、動き回れるようになっている。
【0003】
従来技術の人工呼吸器は、小型で持ち運び易くなっている一方で、複雑な呼吸モードを送出する能力の維持を、通常は低圧ロータリ・ドラッグ・コンプレッサを呼吸送出メカニズムとして用いることにより、行なっている。ドラッグ・コンプレッサは、可変速度の場合もあるし、一定速度の場合もある。可変速度の人工呼吸器コンプレッサの場合は、停止状態から急速に加速することによって動作して、患者に対する吸入支援(吸気)を実現し、次に急速に減速して、患者の呼気を可能にする。従来技術の可変速度コンプレッサ人工呼吸器の急速な加速および減速では、コンプレッサの駆動回路が非常に高い電流を取り扱う必要がある。そのため、人工呼吸器が主電源に接続されていない場合には、大きくて扱いにくい高価な電源システムおよび相当量の予備バッテリ電源が必要になる。
【発明の概要】
【発明が解決しようとする課題】
【0004】
一定速度のコンプレッサの場合は、可変速度コンプレッサの大きくて扱いにくい電源システムは必要ではないが、固有の非効率さがある。その理由は、コンプレッサは、患者に空気がまったく供給されていないとき(たとえば呼気の間)であっても、動作および電力消費を続けるからである。消費電力は、呼気の間、コンプレッサの出力空気流をコンプレッサの取入口まで再循環させることによって、減らすことができる。しかし消費電力が減ったとしても、人工呼吸器がオン・ボード・バッテリ電源によって動作できる時間は、著しく短くなる可能性がある。
【課題を解決するための手段】
【0005】
本発明は、小型、低慣性、高速度、高効率の可変速度モードのルーツ型ブロワを用いる携帯型人工呼吸器を備える。ルーツ型ブロワは、高効率および小サイズであることが知られている。しかし、ルーツ型ブロワは、本来的に騒音が多く、従来、医療用人工呼吸器での利用には適していなかった。医療用人工呼吸器では、過剰なノイズがあると、24時間対応の呼吸支援を必要とすることが多い患者に悪影響を及ぼすからである。本発明の人工呼吸器では、従来技術のルーツ型ブロワのノイズ問題を、ルーツ・ブロワ・ハウジング上の新しいノイズ低減圧力補償オリフィスと、人工呼吸器のハウジング内の複数のバッフリング・チャンバとを組み合わせて用いることにより、克服している。可変速度モードのルーツ型コンプレッサを、特別に構成されたフロー制御および電源システムと共に用いることで、全体として、人工呼吸器のサイズおよび消費電力の両方が低減される。本発明の実施形態により、完全な人工呼吸器機能性(体積および圧力制御モードの両方で動作する能力を含む)が小型の携帯型のユニットにおいて提供される。このようなユニットは、本当の移動し易さを初めて患者にもたらすものである。一実施形態においては、人工呼吸器は、携帯型の内蔵型人工呼吸器であり、小型のラップトップ・コンピュータのサイズに近い一方で、数時間の間、バッテリで電源供給を受けてフル・サービスの呼吸支援を実現する。
【0006】
本発明の1つまたは複数の実施形態においては、人工呼吸器は、より重くてより慣性が大きいルーツ・ブロワを一定速度モードで用いる。ルーツ・ブロワは効率が優れているため、サイズおよび重量を、複雑な呼吸モードを送出できるフル機能の人工呼吸器において以前は達成不可能な程度にまで、小さくすることができる。
【図面の簡単な説明】
【0007】
【図1】本発明の1つまたは複数の実施形態による携帯型人工呼吸器の正面を示す斜視図である。
【図2A】本発明の1つまたは複数の実施形態による携帯型人工呼吸器、ドッキング・クレードルおよび人工呼吸器モニタを含む人工呼吸器システムの正面を示す斜視図である。
【図2B】図2Aの人工呼吸器システムの裏面を示す斜視図である。
【図3】本発明の1つまたは複数の実施形態による携帯型人工呼吸器システムに対する機能上のアーキテクチャを示すブロック図である。
【図4】本発明の1つまたは複数の実施形態による携帯型人工呼吸器システムに対する電子アーキテクチャを示すブロック図である。
【図5】本発明の1つまたは複数の実施形態によるドッキング・クレードルに対する電子アーキテクチャを示すブロック図である。
【図6A】本発明の1つまたは複数の実施形態による携帯型人工呼吸器システムに対するソフトウェア・アーキテクチャの一般的なコンテキストを例示するブロック図である。
【図6B】本発明の1つまたは複数の実施形態による携帯型人工呼吸器システムに対するソフトウェア・アーキテクチャの一般的なコンテキストを例示するブロック図である。
【図7】本発明の1つまたは複数の実施形態による携帯型人工呼吸器の空圧系図である。
【図8】本発明の1つまたは複数の実施形態による呼気サーボ制御システムのトップ・レベル・ブロック図である。
【図9A】本発明の1つまたは複数の実施形態による呼気サーボ制御システムの機械アセンブリ部分を示すブロック図である。
【図9B】本発明の1つまたは複数の実施形態による呼気サーボ制御システムの電子アセンブリ部分を示すブロック図である。
【図9C】本発明の1つまたは複数の実施形態による呼気サーボ制御システムのソフトウェア制御部分を示すブロック図である。
【図10】本発明の1つまたは複数の実施形態によるブロワ・アセンブリを示すブロック図である。
【図11】本発明の1つまたは複数の実施形態によるブロワ・アセンブリを示す分解組立図である。
【図12】本発明の1つまたは複数の実施形態による一対のルーツ・ブロワ・インペラを示す斜視図である。
【図13A】本発明の1つまたは複数の実施形態による穿孔チューブ、を伴うサイレンサ・チャンバを有する人工呼吸器装置を示す図である。
【図13B】本発明の1つまたは複数の実施形態による穿孔チューブ、を伴うサイレンサ・チャンバを有する人工呼吸器装置を示す図である。
【図14A】本発明の1つまたは複数の実施形態による空気出口における段階的スロットを例示するルーツ・ブロワ・ハウジングを示す図である。
【図14B】本発明の1つまたは複数の実施形態による空気出口における段階的スロットを例示するルーツ・ブロワ・ハウジングを示す図である。
【図14C】本発明の1つまたは複数の実施形態による空気出口における段階的スロットを例示するルーツ・ブロワ・ハウジングを示す図である。
【図14D】本発明の1つまたは複数の実施形態による空気出口における段階的スロットを例示するルーツ・ブロワ・ハウジングを示す図である。
【発明を実施するための形態】
【0008】
携帯型人工呼吸器システムについて説明する。以下の説明では、本発明のより十分な説明が得られるように、多くの具体的な詳細、たとえば1つまたは複数の実施形態に対する物理的寸法について述べる。しかし、当業者には明らかなように、本発明は、これらの具体的な詳細なしで実行してもよい。他の場合には、良く知られている特徴については、本発明が不明瞭とならないように、詳細には説明していない。
【0009】
本発明の実施形態では、可変速度モードで動作するルーツ型ブロワを、呼吸送出メカニズムとして用いる携帯型人工呼吸器を実施する。ルーツ型ブロワを用いることで生じる効率および小型化に対する要求と、新しい弱音技術および電子制御システムとによって、人工呼吸器を、パームトップ・コンピュータに匹敵するサイズにまで小さくすることができる。重量および消費電力も同様に小さくなり得る。本発明の人工呼吸器により、連続的な呼吸支援を必要とする患者に対して、向上された移動のし易さがもたらされるため、患者の生活の質の著しい改善が促進されることになる。
【0010】
I.携帯型人工呼吸器、ドッキング・クレードル、およびモニタを有する人工呼吸器システムの実施形態
本発明の1つまたは複数の実施形態においては、携帯型人工呼吸器システムには、携帯型人工呼吸器、ドッキング・クレードル、およびモニタが含まれる。携帯型人工呼吸器は好ましくは、必ずしも必要ではないが、小型、軽量、自給式の救命装置で、非常に携帯型である。静止状態での応用例では、携帯型人工呼吸器は、ドッキング・クレードル内に配置してもよい。ドッキング・クレードルは、単純な構造支持体としての機能を果たす(おそらく電源および/または再充電システムが含まれる)か、携帯型人工呼吸器のインターフェース能力を増大する。たとえば、ドッキング・クレードルには、表示能力を拡張するためのグラフィックス・モニタが含まれていてもよい。
【0011】
A.携帯型人工呼吸器エンクロージャ
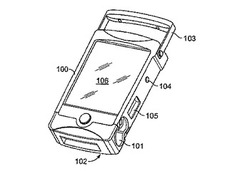
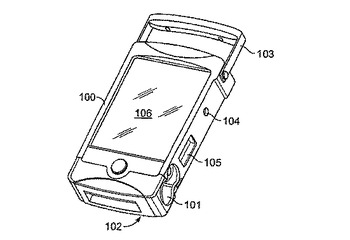
1つまたは複数の実施形態においては、携帯型人工呼吸器は、モールドされたエンクロージャ内にパッケージされていてもよい。実施形態によっては、エンクロージャは、軟質ゴムブートと共成型される。好ましくは、必ずしも必要ではないが、エンクロージャは、比較的コンパクトなフォームファクタを有するように構成される。たとえば一実施形態においては、10インチ(25.4センチメートル)×6インチ(15.24センチメートル)×2インチ(5.08センチメートル)のエンクロージャに、患者が非常に携帯型のユニットから適切な人工呼吸器サポートを受け取るのに必要な装置を、収容してもよい。他の実施形態では、種々のフォームファクタを有するエンクロージャを用いてもよい。
【0012】
図1は、本発明の1つまたは複数の実施形態による携帯型人工呼吸器の正面の斜視図を例示する図である。例示した実施形態においては、空圧系接続部101を、たとえば、人工呼吸器エンクロージャ100の中央線の下方において、左側および右側に形成してもよい。電気的相互接続102を、エンクロージャ100の裏面の下端に形成してもよい(たとえば、クレードル・インターフェースを設けるために)。また電気的相互接続は、たとえば中央線の上方において、エンクロージャ100の左側および/または右側に形成してもよい。
【0013】
人工呼吸器エンクロージャには、ユーザ・インターフェース106が含まれていてもよい。たとえば、ユーザ・インターフェース106を、LEDおよびメンブレン・スイッチ・パネルを用いる一実施形態において、比較的安価に実施してもよい。他の実施形態では、カラーLCDおよびタッチ・スクリーンを用いたグラフィカルユーザ・インターフェース106を実施してもよい。
【0014】
1つまたは複数の実施形態においては、人工呼吸器エンクロージャ100の頂部に、折り畳み式の取っ手103が含まれていてもよい。取っ手103は、折り畳まれるとテーブル・スタンドとしての機能を果たし、エンクロージャに対する面一性がなくなるようにする。ハンド/ショルダ・ストラップ接続点104を、エンクロージャ100に形成してもよい。また、1つまたは複数の実施形態においては、エンクロージャ100の裏面部に薄型のダブテール・スタイルのマウンティング・メカニズムを設けることで、マウントしないデスクトップ適用例と干渉することなく、ポール、壁、またはベッド・レールへの搭載を容易にしてもよい。
【0015】
1つまたは複数の実施形態においては、エンクロージャ100上にバッテリ・ポート105を設けて、内部リムーバブル・バッテリ・パックを収容してもよい。バッテリ・ポート105に、ラッチおよびイジェクト・メカニズムを取り付けて、使用中に信頼性良く接続できることと、エンクロージャがクレードル(後述する)内に設置されている場合でもリムーバブル・バッテリ・パックを容易に交換できることとを、保証することが好ましい。
【0016】
エンクロージャ100は、立設されたサポートに対してドッキング・クレードル内に置くように、および/または携帯型人工呼吸器とクレードル電子機器との間の接続を確立するように、設定してもよい。以下、ドッキング・クレードルの実施形態について説明する。
【0017】
B.ドッキング・クレードルおよびモニタ
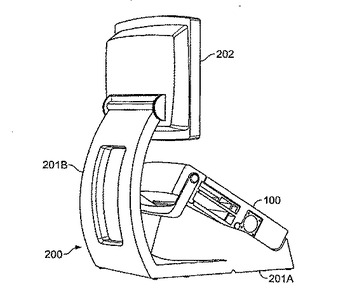
図2Aおよび2Bに示すのは、本発明の1つまたは複数の実施形態による携帯型人工呼吸器、ドッキング・クレードル、およびモニタを備える携帯型人工呼吸器システムの正面および裏面部の斜視図である。図示したように、ドッキング・クレードル200には、ベース201Aおよびクレードル・アーム201Bが含まれていてもよい。人工呼吸器モニタリング能力を拡張して表示するために、アーム201Bにモニタ202を取り付けてもよい。レードル200のベース201A内にドッキングされている携帯型人工呼吸器エンクロージャ100が示されている。
【0018】
1つまたは複数の実施形態においては、ベース201Aは、内部電源またはロジック・コンポーネントがまったくない単純なテーブル・スタンドとして機能するように、設計される。しかし、ほとんどの実施形態においては、内部電子機器が含まれており、電源を供給すること、および携帯型人工呼吸器のインターフェース能力を拡張することが可能なインテリジェント・ドッキング・ステーションとなっている。後者の場合には、ベース201Aによって、ドッキングされた人工呼吸器との電気的相互接続(たとえば、人工呼吸器の下部、裏面端部を通して)が、実現される。付属のモニタ202に対するサポートが実現されるように、ベース201Aには、アーム201Bが取り外し可能に取り付けられていてもよい。クレードル・ベース201A内の電子機器とモニタ202との間の電源およびデータ・ケーブルは、アーム201Bの構造内に収容してもよい。
【0019】
クレードル200には、ドッキングされた人工呼吸器が落下しないことを保証するために、機械的な連結装置が含まれていてもよい。人工呼吸器エンクロージャ100の場合と同様に、クレードル200には、ダブテール・スタイル・マウンティング・メカニズムが組み込まれており、壁またはベッド・レールへの搭載が容易になっていてもよい。ドッキング・クレードル200およびモニタ202にはそれぞれ、射出成形されたコンポーネントが含まれていてもよい。
【0020】
C.人工呼吸器システム機能上のアーキテクチャ
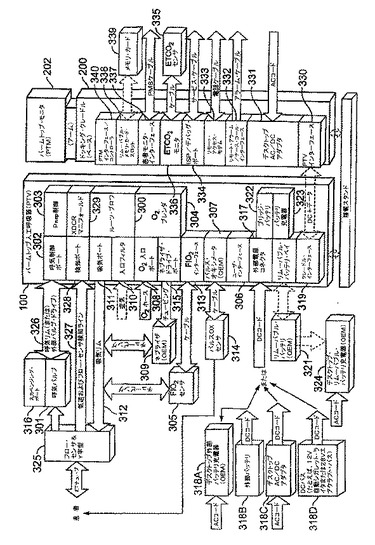
図3は、本発明の1つまたは複数の実施形態による人工呼吸器システムの機能上のアーキテクチャのブロック図である。人工呼吸器空圧系は、ルーツ・ブロワ300に基づいていてもよい。ルーツ・ブロワ300は、部屋の空気を入口フィルタ310を通して取り込んで、加圧ガスを吸気ポート311を通して患者に送る。空圧系システムは、シングル・リムおよびデュアル・リム患者回路の両方をサポートしてもよい。その結果、呼気バルブ301を、人工呼吸器エンクロージャ100に対して、外部で実装することもできるし、内部で実装することもできる。呼気制御ポート302およびPEEP(呼気終末陽圧:Positive End-expiratory Pressure)制御303によって、パイロット圧力が生成される。パイロット圧力は、吸気中に呼気バルブ301を閉じ、呼気中に、ソフトウェア制御されたPEEPパイロット圧力に対して、呼気バルブ301を開く。スカベンジング・ポート316を用いて、呼気中に患者が用いない圧縮空気を再生利用または再循環させてもよい。
【0021】
人工呼吸器100は、付属の内部O2ブレンダ304を用いて、ブレンドされたガスを送ってもよい。吸気リム312内のブレンド・ガス送出は、FIO2インターフェース313に接続された外部FIO2(吸気酸素の部分)センサ305を介してモニタしてもよく、またユーザ・インターフェース306上に表示してもよい。同様に、患者の血液O2レベルも、付属の内部パルス・オキシメータ307に接続された外部パルス酸素センサ314を介してモニタしてもよいし、またユーザ・インターフェース306上に表示してもよい。O2入口ポート308に高圧酸素が供給されたときに、人工呼吸器100は、エアロゾル化された薬を患者に送るために外部ネブライザ309を駆動してもよく、同時に、付加されたガス送出を補償する。
【0022】
1つまたは複数の実施形態においては、Y字型の(「Y」)接合部325を用いて、吸気リム312および呼気リム326を、患者までのメイン人工呼吸器チューブに結合させる。Y字型の接合部325からの気道およびフロー・センサ・ライン327が、検知ポート328を介して、人工呼吸器エンクロージャ100に通じる。トランスデューサ(XDCR)マニフォールド329は、検知ポート328からの気道およびフロー値を電気的な検知信号に変換して、人工呼吸器制御ループ内で用いる。
【0023】
1つまたは複数の実施形態においては、携帯型人工呼吸器(100)は、外部電源コネクタ317を通して(たとえば、外部バッテリ充電器318A、外部バッテリ318B、AC/DCアダプタ318C、DCバス318Dなどから)受け取った外部供給のDC電源により、動作する。クレードル・インターフェース319によって、ケーブル・プラグ・インを用いることなく人工呼吸器に外部電源を供給してもよい。たとえば、人工呼吸器エンクロージャ100を、ドッキング・クレードル200内に置いてもよい。ドッキング・クレードル200では、両装置の接点が自動的に嵌合して、電源経路および/またはデータ経路が実現される。同様に、リムーバブル・バッテリ321をリムーバブル・バッテリ・ベイ320内に配置して、人工呼吸器を携帯型のスタンド・アローンの装置として用いてもよい。人工呼吸器を、内部ブリッジ・バッテリ(322)を用いて構成して、リムーバブル・バッテリ(321)を交換する間に人工呼吸器に連続的に電源が供給されるようにしてもよい。人工呼吸器エンクロージャ100に外部電源を接続したときに、バッテリ充電器323を用いて、リムーバブル・バッテリ321および/またはブリッジ・バッテリ322を充電してもよい。外部リムーバブル・バッテリ充電器(324)を用いて、追加バッテリを充電してもよい。
【0024】
図3に示した実施形態においては、ドッキング・クレードル200には、人工呼吸器インターフェース330が含まれている。人工呼吸器インターフェース330は、人工呼吸器100のクレードル・インターフェース・ブロック319と接続されて、電源を伝達するとともに、クレードル200内部のインターフェース電子機器との電気的な接続部を実現する。クレードル200内の付属の内部AC/DCアダプタ331は、インターフェース・ブロック319および330を介して、人工呼吸器100に対するDC電源をもたらすだけでなく、クレードル200内の回路およびモニタ202へのDC電源をもたらしてもよい。クレードル200は、追加的にまたは代替的に、外部電源(たとえば、電源318A〜318D)からDC電源を受け取るDCコネクタを有していてもよい。
【0025】
クレードル200を用いて、人工呼吸器のインターフェース能力を拡張して、たとえば以下のものを含むようにしてもよい。出力アラーム・ケーブルを有するリモート・アラーム/ナース・コール・インターフェース332;リモート・アクセス・モデム333;ISP/デバッグ・ポート334(サービスおよびメンテナンス・ポート);外部ETCO2センサ335に接続されたETCO2(終末呼気二酸化炭素)モニタ336;患者モニタ・システムをサポートする患者モニタ・インターフェース337(たとえばHPバリューリンク(Valuelink)およびスペースラブス・フレックス(SpaceLabsFlexport)ポート);リムーバブル・メモリ・カード339をサポートするためのリムーバブル・メモリ・カード・スロット338;およびモニタ・インターフェース/コントローラ340。リムーバブル・メモリ・カード339を用いて、人工呼吸器とパーソナル・コンピュータとの間の情報移動を容易にして、データの再検討および印刷に備えてもよい。
【0026】
クレードル200のアーム201Bに結合されているモニタ202は、たとえば波形、ループ、および傾向データを連続的に表わすことができる付属の表示ユニットである。
D.人工呼吸器電子アーキテクチャ
1つまたは複数の実施形態においては、携帯型人工呼吸器電子アーキテクチャを、3つの主要なサブシステムに分割してもよい。すなわち、人工呼吸器コア・サブシステム、ユーザ・インターフェース・サブシステム、および電源サブシステムである。各サブシステムには、種々のデジタル、アナログ、および電源回路とともに、サブアセンブリ中に分配される1つまたは複数のソフトウェア・プログラマブル・マイクロコントローラが、含まれていてもよい。他の実施形態においては、電子アーキテクチャを、異なるラインに沿って分割してもよいし、アーキテクチャをまったく分割しなくてもよい。
【0027】
図4に例示するのは、人工呼吸器電子アーキテクチャの一実施形態であって、人工呼吸器コア(VCサブシステム)401、ユーザ・インターフェース(UI)サブシステム400、および電源サブシステム402を有する場合である。以下、各サブシステムについて、より詳細に説明する。
【0028】
1.人工呼吸器コア・サブシステム
図4の実施形態においては、VCサブシステム401に、携帯型人工呼吸器のコア・ガス送出機能を実施するための電子機器が含まれている。人工呼吸器プロセッサ443上で実行されるソフトウェア・プログラムは、全般的な人工呼吸器コア機能性を制御することを、各機能上のサブアセンブリまたはモジュール内に配置されたマイクロコントローラに命令を出し、かつマイクロコントローラをモニタすることによって、行なってもよい。これらのマイクロコントローラはそれぞれ、個々のサブアセンブリの特定のタスク専用のソフトウェア・プログラムを実行してもよい。他の実施形態においては、単一のプロセッサを用いて、複数のサブアセンブリのタスクを実行してもよい。例示した実施形態においては、VCサブシステム401には、人工呼吸器プロセッサ443が含まれている。人工呼吸器プロセッサ443は、ルーツ・ブロワ・モジュール444、呼気制御モジュール454、ブレンダ・モジュール461、およびトランスデューサ・モジュール470内の個々のプロセッサと通信する(代替的な実施形態においては、モジュール444、454、461および470のうちの2つ以上が、単一のモジュール・プロセッサとして機能してもよい)。
【0029】
ルーツ・ブロワ・モジュール444では、ブロワ・プロセッサ445が、ブロワ速度の制御を、ルーツ・ブロワのインペラに取り付けられたブラッシュレスDCモータ(BLDC453)のソフトウェア転流を通して、行なってもよい。インバータ449を用いて、ブロワ・プロセッサ445からのロジック・レベル転流信号を高出力AC電流に変換して、BLDCモータ453を駆動してもよい。BLDCモータ453内の複数の磁気的センサ(たとえば、アナログ・ホール・センサ452)によって、検知信号がブロワ・プロセッサ445に送信されて、ロータ位置および速度が決定される。ブロワ・プロセッサICの内部または外部に、ADC(アナログ・デジタル・コンバータ)回路を設けてもよい。これは、検知信号たとえばホール・センサ452からの検知信号を、サンプリングし、およびブロワ・プロセッサ445用のデジタル値に変換するためである。
【0030】
ルーツ・ブロワ取入口および出口ポートにおけるマイクロフォン451を用いて、ルーツ・ブロワ装置の音響ノイズをモニタしてもよい。またマイクロフォン信号は、ブロワ・プロセッサ445内で処理される前に、ADC回路によってサンプリングされる。増幅器回路447および448を用いて、マイクロフォンおよびモータ検知信号を、ADC回路の前に、それぞれ増幅およびフィルタリングしてもよい。システム・ノイズ・レベルを減らすために、ブロワ・プロセッサ445が、ブロワ・ノイズを打ち消すための「騒音防止」信号を生成してもよい。騒音防止チャンネル(たとえば、各チャンネルはブロワの取入口および出口ポートにおけるノイズ用)を、電力増幅器446を介して増幅してもよい。電力増幅器446自体は、ブロワ・ダクト構造内に位置する一対のスピーカ450を駆動する。
【0031】
ブロワ・プロセッサ445は、(オン・チップまたはオフ・チップの)データSRAM、プログラム・フラッシュ・メモリ、および校正EEPROMを含んでいてもよい。フラッシュおよびEEPROMメモリは、製造、サービス、およびフィールド・ソフトウェア更新を容易にするために、システム内でプログラマブルであってもよい。ブロワ・プロセッサ445は、高速同期シリアル・ポート(SSIO479)を介して、人工呼吸器制御プロセッサ443と通信してもよい。
【0032】
ブロワ・プロセッサ445は、ブロワ・モジュール444の電子機器を校正するための、およびそのEEPROM内の校正データを記憶するためのメカニズムを、実現してもよい。ブロワ・プロセッサ445は、ブロワ・モジュール444の電子機器の調子をモニタするための、および人工呼吸器プロセッサ443(または別個の試験装置)へのセルフ・テスト・フィードバックを生成するためのさらなる能力を、実現してもよい。
【0033】
呼気制御モジュール454内では、呼気プロセッサ455が、パイロット圧力を生成して、この圧力を呼気バルブ風船ダイアフラムに送る複数のソレノイド・バルブを制御してもよい。ソレノイド・バルブ・ドライバ456は、呼気プロセッサ455が生成するロジック・レベル制御信号を高出力DC電流に変換して、呼気制御バルブ459およびPEEPパイロット・バルブ460を駆動させる。呼気プロセッサ455は、PEEP圧力トランスデューサ458をモニタして、PEEPパイロット・バルブ460のクローズド・ループ制御を可能にする。トランスデューサ458からのアナログ信号を、増幅器457が増幅およびフィルタリングすることを、呼気プロセッサ455に対してADC回路がこの信号をA/D変換およびサンプリングする前に、行なってもよい。
【0034】
ブロワ・プロセッサ445の場合と同様に、呼気プロセッサ455には、(オン・チップまたはオフ・チップの)データSRAM、プログラム・フラッシュ・メモリ、および校正EEPROMが含まれていてもよい。フラッシュおよびEEPROMメモリは、製造、サービスおよびフィールド・ソフトウェア更新を容易にするために、システム内でプログラマブルであってもよい。呼気プロセッサ455は、高速同期シリアル・ポート(SSIO480)を介して、人工呼吸器制御プロセッサ443と通信してもよい。
【0035】
呼気プロセッサ455は、呼気制御モジュール454の電子機器を校正するための、およびそのEEPROM内の校正データを記憶するためのメカニズムを、実現してもよい。呼気プロセッサ455は、呼気制御モジュール444の電子機器の調子をモニタするための、および人工呼吸器プロセッサ443(または別個の試験置)に対するセルフ・テスト・フィードバックを生成するためのさらなる能力を、実現してもよい。
【0036】
ブレンダ・モジュール461内では、ブレンダ・プロセッサ462が、システム内の酸素フローを制御し、付属のネブライザ駆動機能を制御し、およびFIO2センサ・インターフェース469を介して外部センサをモニタする。ソレノイド・バルブ・ドライバ463は、ブレンダ・プロセッサ462が生成するロジック・レベル制御信号を、高出力DC電流に変換して、ブレンダ・バルブ468およびネブライザ・バルブ467を駆動する。ブレンダ・プロセッサ462は、酸素圧力トランスデューサ465をモニタして、ブレンダ・バルブ468のクローズド・ループ制御を可能にする。トランスデューサ465およびインターフェース469からのアナログ信号を、増幅器464および466がそれぞれ増幅およびフィルタリングすることを、ブレンダ・プロセッサ462に対してADC回路がこの信号をA/D変換およびサンプリングする前に、行なってもよい。
【0037】
ブロワおよび呼気プロセッサの場合と同様に、ブレンダ・プロセッサ462には、(オン・チップまたはオフ・チップの)データSRAM、プログラム・フラッシュ・メモリ、および校正EEPROMが含まれていてもよい。フラッシュおよびEEPROMメモリは、製造、サービス、およびフィールド・ソフトウェのア更新を容易にするために、システム内でプログラマブルであってもよい。
【0038】
ブレンダ・プロセッサ462は、高速同期シリアル・ポート(SSIO481)を介して、人工呼吸器制御プロセッサ443と通信してもよい。ブレンダ・プロセッサ462は、ブレンダ・モジュール461の電子機器を校正するための、およびそのEEPROM内の校正データを記憶するためのメカニズムを、実現してもよい。ブレンダ・プロセッサ462はさらに、ブレンダ・モジュール461の電子機器の調子をモニタするための、および人工呼吸器プロセッサ443(または別個の試験装置)へのセルフ・テスト・フィードバックを生成するためのさらなる能力を、実現してもよい。
【0039】
トランスデューサ・モジュール470内では、圧力プロセッサ471が、臨界のシステム圧力を測定し、および周期的なオート・ゼロおよび検知ライン・パージ機能を管理する。ソレノイド・バルブ・ドライバ472は、圧力プロセッサ471が生成するロジック・レベル制御信号を、高出力DC電流にト変換して、オートゼロ・バルブ473およびパージ・バルブ474を駆動する。圧力プロセッサ471は、フロー・センサ圧力トランスデューサ477と、気道およびブロワ圧力トランスデューサ478とをモニタする。
【0040】
増幅器476は、トランスデューサ477および478の検知信号出力を増幅およびフィルタリングすることを、圧力プロセッサ471がこれらの検知信号をサンプリングおよび処理する前に、行なう。一実施形態においては、2つの並列増幅器を、フロー・センサ圧力トランスデューサ477に専用にしてもよい。一方の増幅器が、高利得、狭レンジの、オフセット補償されたフロー・トリガ・チャンネルをもたらしてもよい。オフセット補償は、ソフトウェア制御されたDAC(デジタル・アナログ・コンバータ)回路475を用いて実現される。第2のチャンネルが、患者から出入りする流れの全双方向ダイナミック・レンジをカバーする低利得の増幅器をもたらしてもよい。また増幅器476によって、増幅された気道ゲージ圧力およびブロワ差圧信号が得られる。
【0041】
他のモジュール・プロセッサの場合と同様に、圧力プロセッサ471には、(オン・チップまたはオフ・チップの)データSRAM、プログラム・フラッシュ・メモリ、および校正EEPROMが含まれていてもよい。フラッシュおよびEEPROMメモリは、製造、サービス、およびフィールド・ソフトウェア更新を容易にするために、システム内でプログラマブルであってもよい。圧力プロセッサ471は、高速同期シリアル・ポート(SSIO482)を介して、人工呼吸器制御プロセッサ443と通信してもよい。
【0042】
圧力プロセッサ471は、トランスデューサ・モジュール470の電子機器を校正するための、およびそのEEPROM内の校正データを記憶するためのメカニズムを、実現してもよい。圧力プロセッサ471はさらに、トランスデューサ・モジュール470の電子機器の調子をモニタするための、および人工呼吸器プロセッサ443(または別個の試験装置)へのセルフ・テスト・フィードバックを生成するためのさらなる能力を、実現してもよい。
【0043】
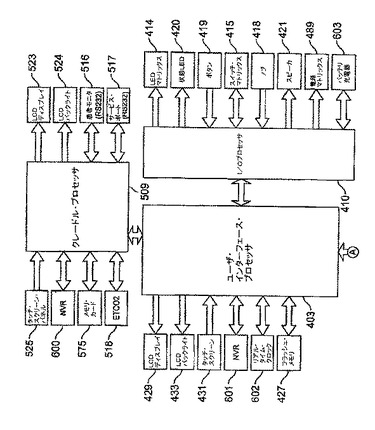
2.ユーザ・インターフェース・サブシステム
ユーザ・インターフェース(UI)サブシステム400には、装置ユーザおよび外部周辺機器に対するインターフェースを形成する電子機器が含まれている。1つまたは複数の実施形態においては、UIサブシステム400は、ユーザに、患者状態、装置状態、アラーム条件、および制御設定に関する音響および視覚のフィードバックなどの情報を与えてもよい。UIサブシステム400は、ユーザ入力(たとえば、ノブおよびボタン)をモニタして、設定を、人工呼吸器コア・サブシステム401の人工呼吸器プロセッサ443に、シリアル・チャンネル(たとえば、UART438)を介して伝達する。また1つまたは複数の実施形態においては、UIサブシステム400は、電源サブシステム402をモニタおよび制御し、装置構成および制御設定を不揮発性メモリ内に維持し、イベントおよびユーザ動作のレコーダとしての機能を果たし、および任意のアクセサリ装置(たとえば、ドッキング・クレードル200、内部パルス・オキシメータ307など)と通信する。
【0044】
UIサブシステム400内では、ユーザ・インターフェース・プロセッサ403が、全般的なユーザ・インターフェース機能性を制御するソフトウェア・プログラムを実行する。ユーザ・インターフェース・プロセッサ403に関連するプログラム・フラッシュ・メモリは、製造、サービス、およびフィールド・ソフトウェア更新を容易にするために、システム内でプログラマブルであってもよい。1つまたは複数の実施形態においては、ある特定のタスク、たとえば表示をリフレッシュすることおよびキーを走査することは、ユーザ・インターフェース・サブアセンブリ内に位置するプログラマブル・マイクロコントローラおよび/または専用のハードウェア・コントローラに任せてもよい。以下、可能なUIサブアセンブリの機能性について説明する。
【0045】
人工呼吸器ユーザ・インターフェースは、種々の表示および入力/出力メカニズムによって実施してもよい。たとえば1つのユーザ・インターフェース実施形態(ハイ・エンド・ユーザ・インターフェース404として標示される)では、カラーLCD(液晶表示:たとえば、TFTまたはVGA)グラフィックス・パネル429およびアナログ・タッチ・スクリーン・オーバーレイ431を利用して、フレキシブル・ユーザ・インターフェースに高い情報内容を提供する。インターフェース404は、UIプロセッサ403にバス435を介して接続される。LCDコントローラ432は、高速LVDS(低電圧差動シグナリング)インターフェース428を介して、RAM画像バッファ(オン・チップまたはオフ・チップ)からLCD429をリフレッシュする時間のかかるタスクを行なってもよい。UIソフトウェアは、画像バッファの更新を、表示内容が実際に変化する時間に制限してもよい。
【0046】
LCDバックライトには、バックライト・インバータ430から電力が供給される。スクリーンの明るさは、バックライトDAC433を用いて、UIソフトウェアによって制御してもよい。タッチ・スクリーンADC/コントローラ434は、タッチ・スクリーン・オーバーレイ431の走査を行ない、またタッチ動作の時間の間にUIソフトウェアに割り込みおよびデータをもたらす。
【0047】
他のユーザ・インターフェース実施形態では、代替的にまたは追加的に、ロー・エンド・ユーザ・インターフェース408を用いてもよい。ロー・エンド・ユーザ・インターフェース408には、たとえば、ドット・マトリックスの組み合わせ、7セグメントおよび/または別個のLED(LEDマトリックス414として表わされる)、ならびにメンブレン・キー・マトリックス415が含まれる。LEDマトリックス414は、LED電源ドライバ416およびLEDシンク・ドライバ417によって駆動される。IO(入力/出力)プロセッサ410は、RAM画像バッファからLEDマトリックス414をリフレッシュするタスクを行なってもよい。UIソフトウェアは、画像バッファの更新を、その内容が変化したときに行なってもよい。またIOプロセッサ410は、タスクキー・マトリックス415を走査するタスク、およびキー動作の時間の間にUIソフトウェアに割り込みおよびデータをもたらすタスクを行なう。
【0048】
ユーザ・インターフェース・オプション(ハイ・エンド・インターフェース404およびロー・エンド・インターフェース408)の両方が、共通のインターフェース409を用いてもよい。共通のインターフェース409には、ノブ(たとえば、ロータリ・スイッチ)418、専用機能に対する1つまたは複数のハード・キー419、状態LED420、および音響のソフトウェア・アラーム・スピーカ421が、含まれる。IOプロセッサ410は、ノブ418およびハード・キー419を追跡して、ノブおよび/またはハード・キー動作の時間の間にUIソフトウェアに割り込みおよびデータをもたらしてもよい。またIOプロセッサ410は、ソフトウェア・アラームを合成して、UIソフトウェアからのコマンドに基づいて状態LED420を制御してもよい。
【0049】
付属の内部パルス・オキシメータ・モジュール426(その外部センサが患者の指に配置されている)は、モニタ・データたとえば脈拍数および酸素飽和レベルを、ユーザ・インターフェース・プロセッサ403に与える。ユーザ・インターフェース・プロセッサは、シリアル・インターフェースたとえばUART437を介して、モジュール426と通信する。
【0050】
クレードル・インターフェース423には、コネクタ424(ドッキング・クレードル上の連結装置コネクタと電気的に結合するため)と、送受信器(たとえば、ISO XCVR425)とが含まれており、人工呼吸器とドッキング・クレードル電子機器との間での中程度のデータ速度での通信(たとえば、シリアルUARTインターフェース438を介して)が可能になっている。また、DC電源を、このインターフェースを通して(コネクタ424から電源モジュール483までのクレードル電源ライン441を参照のこと)、ドッキング・クレードルから人工呼吸器まで伝達してもよい。また、人工呼吸器は、外部に、クレードル・インターフェース423を通して、リモート・アラーム/ナース・コール信号を送ってもよい。
【0051】
不揮発性メモリ回路(たとえば、NANDフラッシュ427)が、人工呼吸器イベントおよび制御設定変化を長期間記録するために、UIサブシステム400内に含まれていてもよい(「ブラック・ボックス」レコーダのように)。ユーザ・インターフェース・プロセッサ403は、たとえば、パラレル・バス(436)を介して、不揮発性メモリ427に直接書き込んでもよい。
【0052】
また、IOプロセッサ410は、電源サブシステム402に対する管理部としての機能を果たしてもよい。たとえば、IOプロセッサ410は、すべての電源入力および電源出力をモニタし、アクティブな入力電源の選択(電源スイッチ・マトリックス489を介した)を管理し、2つの内部バッテリ充電器(485および487)を制御してもよい。さらに、IOプロセッサ410は、「オン/オフ」および「アラーム無音/リセット」のハード・キーの状態をモニタして、共通インターフェース409上の「オン/オフ」、「ベント インオプ(VENT INOP)」、「アラーム無音」、「外部電源」、「バッテリ状態」、「充電状態」LEDを駆動してもよい。
【0053】
IOプロセッサ410は、装置監視部としての機能を果たしてもよい。たとえば一実施形態においては、各サブアセンブリは、IOプロセッサ410に、調子が良好であることを周期的に報告しなければならない。同様に、IOプロセッサ410は、アラーム・システム407のアラーム・ドライバ412に、調子が良好であることを周期的に報告しなければならない。アラーム・ドライバ412が、調子が良好であることの更新を受け取らない場合には、音響のハードウェア・アラーム(INOP)413およびリモート・アラーム/ナース・コール出力(411)が、始動される。また、アラーム・ドライバ412は、救命機能の再始動を試みるために、装置リセットをトリガしてもよい。
【0054】
3.電源サブシステム
人工呼吸器への電源供給は、外部DC電源(たとえば、外部電源492またはクレードル・インターフェース423)からコネクタ490を介してか、または内部電源(たとえば、リムーバブル・バッテリ491またはブリッジ・バッテリ486)から、行なってもよい。ブリッジ・バッテリ486のサイズは、人工呼吸器のシームレスな動作が実現され、一方でリムーバブル・バッテリ491がコネクタ488から交換されるような大きさである。2つの独立した内部充電器(485および487)が、リムーバブル・バッテリ491およびブリッジ・バッテリ486に対する充電を維持する目的で、含まれていてもよい。電源484には、人工呼吸器システム全体を通して用いられるDC電圧を提供するために、複数のスイッチングおよび/または線形電源が含まれていてもよい。
【0055】
E.ドッキング・クレードル電子アーキテクチャ
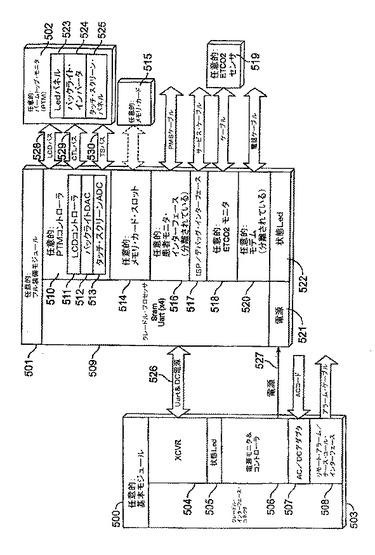
図5は、ドッキング・クレードル200の一実施形態に対する電気的なアーキテクチャのブロック図である。図示したように、ドッキング・クレードルは、基本モジュール500とフル機能モジュール501とに分割されている。基本モジュール500によって、基本的な電源および状態インディケータとともに、アラーム・ケーブル出力が得られる。フル機能モジュール501によって、さらなる処理能力とともに、さらなる接続インターフェース、モニタリング能力、および追加の表示モニタに対するサポートが実現される。特徴の区分は、ドッキング・クレードル内で実施される(実施される必要はないが)能力の範囲を強調するように、示されている。例示した特徴は、網羅的であることが意図されているわけではなく、また必要な特徴を表わしているわけでもない。ドッキング・クレードルの異なる実施形態には、本発明の範囲から逸脱することなく、特徴の異なる組み合わせ、および異なる数の特徴が含まれていてもよい。
【0056】
例示した実施形態においては、基本モジュール500には、クレードル・インターフェース・コネクタ503が含まれている。クレードル・インターフェース・コネクタ503は、人工呼吸器のクレードル・インターフェース・コネクタ424と電気的に接続するものである。人工呼吸器には、DC電源が、AC/DCアダプタ507を介して供給される。AC/DCアダプタ507は、AC電源を、外部電源から(たとえば、壁出口に取り付けられるケーブルから)受け取ってもよい。また、AC/DCアダプタ507は、DC電源をフル機能モジュール501に、電源モニタおよびコントローラ・ブロック506を介して供給してもよい。人工呼吸器からのリモート・アラーム/ナース・コール出力(図4のブロック411を参照)は、リモート・アラーム/ナース・コール・インターフェース508を通して、外部アラーム・ケーブルの取り付けができるように(たとえば、病室内の壁ジャックまたは装置へのプラグ差込みのために)、生成される。フル機能モジュール501がある場合には、送受信器(XCVR)回路504を実装して、クレードル・インターフェース・コネクタ503を介した人工呼吸器との通信を容易にしてもよい。送受信器回路504は、シリアル・インターフェース、たとえばUARTインターフェース526を介して、クレードル・プロセッサ509と通信してもよい。基本モジュール500内のハードウェア駆動の状態LED505によって、基本的な装置状態、たとえばアクティブな存在、および/またはAC/DCアダプタ507の調子、および人工呼吸器との接続の調子が、得られてもよい。
【0057】
フル機能モジュール501を実施して、ドッキング・クレードルのインターフェース能力をさらに拡張して、たとえば、以下のオプションを含むようにしてもよい。追加の表示モニタ(502)に対するサポート、メモリ・カード・スロット514内に1つまたは複数のメモリ・カード575(たとえば、コンパクトなフラッシュ・メモリ・カード)を追加することによるメモリ拡張、追加の患者モニタリング・インターフェース516、内部ETC02モニタ518(外部ETC02センサ579に接続される)、およびモデム520(たとえば、電話機を介したリモート・アクセス用)。
【0058】
クレードル・プロセッサ509が実行するソフトウェア・プログラムによって、フル機能モジュール501の付属の特徴が制御される。クレードル・プロセッサ509には、(オン・チップまたはオフ・チップの)データSRAMメモリ、プログラム・フラッシュ・メモリ、およびバッテリ・バックアップ付きSRAMが含まれていてもよい。フラッシュ・メモリは、製造、サービス、およびフィールド・ソフトウェア更新を容易にするために、ISP/デバッグ・インターフェース(サービス・ポート)517を介して、システム内でプログラマブルであってもよい。
【0059】
フル機能モジュール501では、フル機能モジュール回路が必要とするすべての供給電圧を生成するDC−DC変換を行なうために、電源521を設けてもよい。モジュール電子機器のオン/オフ状態および調子を示すために、ソフトウェア駆動状態LED522が含まれていてもよい。
【0060】
追加の表示モニタ502に対するサポートを実現するために、フル機能モジュール501にモニタ・コントローラ510を備え付けてもよい。モニタ・コントローラ510には、LCDコントローラ511(モニタはLCDモニタであると仮定する)、バックライトDAC512、およびタッチ・スクリーンADC513が含まれている。LCDコントローラ511からは、データおよび制御信号が、LCD−パネル523に、それぞれLCDバス528および制御(CTL)バス529を介して供給される。バックライトDACは、バックライト・インバータ回路524を駆動する。タッチ・スクリーンADC513は、タッチ・スクリーン・パネル525を制御するとともに、TSバス530を介してタッチ・スクリーン・データを受信する。他の実施形態においては、追加のまたは異なる特徴を、フル機能モジュール501内で具体化してもよい。
【0061】
F.人工呼吸器システムに対する一般的なソフトウェア・アーキテクチャ
1つまたは複数の実施形態においては、人工呼吸器およびドッキング・クレードルには、個々のハードウェアを制御し、システムの動作特性を決定する埋め込みソフトウェア(および/またはファームウェア)が含まれている。このソフトウェアは、システム全体を通して種々のサブアセンブリ上に分配される複数のプロセッサ間で、分割してもよい。図6は、本発明の1つまたは複数の実施形態による人工呼吸器システムの一般的なソフトウェア・アーキテクチャのコンテキストを例示するブロック図である。
【0062】
図6では、人工呼吸器システムに対するソフトウェアは、以下のプロセッサ内に分配されている。すなわち、ユーザ・インターフェース・プロセッサ403、IOプロセッサ410、換気プロセッサ443、ブレンダ・プロセッサ462、呼気プロセッサ455、圧力プロセッサ471、ブロワ・プロセッサ445、およびクレードル・プロセッサ509である。以下、これらの個々のプロセッサが実行するソフトウェアの種々の機能について説明する。説明する機能は、例示だけを目的として示しており、網羅的な表現であるとも、すべての実施形態に対して必要な機能であるとも、考えてはならない。説明を容易にするために、各プロセッサ上で実行されるソフトウェアは、プロセッサの名前を参照して呼ぶことにする(すなわち、ユーザ・インターフェース・プロセッサ上で実行されるソフトウェアは、ユーザ・インターフェース・ソフトウェアと呼び、ブレンダ・プロセッサ上で実行されるソフトウェアは、ブレンダ・ソフトウェアと呼ぶ、など)。
【0063】
ユーザ・インターフェース・ソフトウェア(ユーザ・インターフェース・プロセッサ403上で実行される)は、IOプロセッサ410およびクレードル・プロセッサ509と通信するとともに、換気制御データ(たとえば、設定およびアラーム限界)を換気プロセッサ443に送るように構成されてもよい。ユーザ・インターフェース・ソフトウェアは、クレードル・プロセッサ509から受け取ったアプリケーション・コードを、フラッシュ・メモリ427内に記憶してもよく、またアプリケーション・コードIOの更新を、プロセッサ410、換気プロセッサ443、ブレンダ・プロセッサ462、呼気プロセッサ455、圧力プロセッサ471およびブロワ・プロセッサ445に対して、行なってもよい。またユーザ・インターフェース・ソフトウェアは、傾向データ、ベント設定、およびユーザ構成データを、不揮発性RAM(NVR)601に記憶してもよく、また、すべてのイベント、たとえば制御変化、アラーム、および故障を、フラッシュ・メモリ427の「ブラック・ボックス」部分に記録してもよい。ユーザ・インターフェース・ソフトウェアは、LCDユーザ・インターフェース(LCD429、タッチ・パネル431、およびバックライト433)を駆動して、たとえば、換気プロセッサ443から受け取るアラーム・データおよび/またはモニタされたデータを表示する。
【0064】
IOソフトウェア(IOプロセッサ410上で実行される)は、ユーザ・インターフェース・プロセッサ403と通信して、取り付けられた周辺機器回路および装置に対するインテリジェント・コントローラを実現するように構成されてもよい。たとえばIOソフトウェアは、状態LED420、共通のボタン(またはキー)419、ノブ418、およびスピーカ421に対する低レベル・ドライバを実現してもよい。加えて、IOソフトウェアは、LEDマトリックス414をリフレッシュし、キー・マトリックス415を走査し、および電源スイッチ・マトリックス489およびバッテリ充電器603(485、487)を制御するように構成されてもよい。
【0065】
換気ソフトウェア(換気プロセッサ443上で実行される)は、主な機能、たとえば呼吸の生成、圧力サーボの実施、および操作(たとえば、ネブライザ活性化、I−ホールド(吸入ホールド)、E−ホールド(呼気ホールド)など)の順序づけを制御するように構成されてもよい。また換気ソフトウェアは、モニタされたパラメータを算出し、モニタされた値をアラーム限界と比較し、および圧力プロセッサ471に対するオート・ゼロ機能をスケジュールするように構成されてもよい。
【0066】
ブレンダ・ソフトウェア(ブレンダ・プロセッサ462上で実行される)は、ネブライザ・バルブ467を制御し、およびブレンディング・サーボを実施してブレンド・バルブ468を制御するように構成されてもよい。またブレンダ・ソフトウェアは、O2トランスデューサ465をモニタおよび校正し、センサ469の校正を管理し、およびFiO2データを換気プロセッサ443に転送してもよい。
【0067】
呼気ソフトウェア(呼気プロセッサ455上で実行される)は、パイロット圧力トランスデューサ458からの入力に基づいて、PEEPイン・バルブ604およびPEEPアウト・バルブ605の制御を行なうためのPEEPサーボを実施するように構成されてもよい。また呼気ソフトウェアは、呼気バルブ459を制御し、およびパイロット圧力トランスデューサおよびPEEPサーボの校正を管理してもよい。
【0068】
圧力ソフトウェア(圧力プロセッサ471上で実行される)は、フロー・トランスデューサ477からの校正されたトリガ圧力読み取り値およびフロー・センサ圧力読み取り値、ブロワ・トランスデューサ607からの校正されたブロワ差圧読み取り値、および気道トランスデューサ606からの校正された気道圧力読み取り値を、換気プロセッサ443に供給するように構成されてもよい。また圧力ソフトウェアは、オート・ゼロ・バルブ473およびパージ・バルブ474を用いて、オート・ゼロおよびパージ機能を実施してもよい。
【0069】
ブロワ・ソフトウェア(ブロワ・プロセッサ445上で実行される)は、速度サーボを実施し、ブロワ・モータ453を転流するように構成されてもよい。速度サーボの実施、およびモータ453の転流を容易にするために、ブロワ・ソフトウェアは、モータ位置センサ(たとえば、ホール・センサ452)を校正し、モータ位置センサ452の出力からロータ位置および速度を算出してもよい。また、ブロワ・ソフトウェアは、モータ453のアクティブなブレーキングと、アクティブな音キャンセリングとを実施してもよい(たとえば、マイクロフォン451からの入力を使用し、スピーカ450を介して騒音防止出力を生成することによって)。
【0070】
クレードル・ソフトウェア(クレードル・プロセッサ509上で実行される)は、ユーザ・インターフェース・プロセッサ403と通信し、換気データ(たとえば、波、ループ、データ、概要、および傾向)をLCDディスプレイ523に表示するよう構成されてもよい。また、クレードル・ソフトウェアは、傾向データを記憶してメモリ・カード575上に画像を印刷するように構成されてもよい。クレードル・ソフトウェアは、ETC02モニタ518からETC02データを集めて、そのデータを、ユーザ・インターフェース・プロセッサ403を介して人工呼吸器に送信してもよい。さらに、患者データおよびアラームを、他の患者モニタ・システムに転送してもよい(たとえば、ポート516を介して)。
【0071】
II.一実施形態における人工呼吸器の空圧系
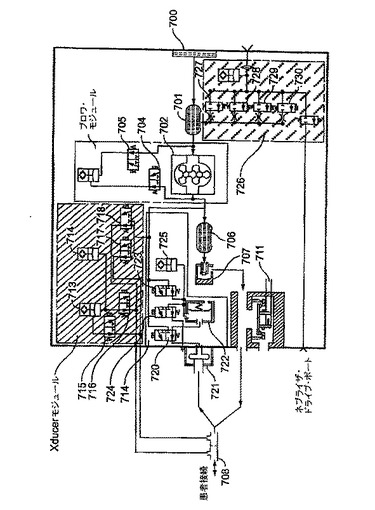
本発明の1つまたは複数の実施形態において、人工呼吸器の空圧系は、複数の電気機械サブアセンブリを備える。換気機能性は、これらの電気機械サブアセンブリの空圧系機能をコンピュータ制御することによって、実現される。図7は、人工呼吸器の一実施形態の空圧系図である。
【0072】
図7のシステムでは、屋内空気が、入口フィルタ700を通して取り入れられる。その後、空気は、組み合わせアキュームレータ/サイレンサ・チャンバ701を通って移動する。組み合わせアキュームレータ/サイレンサ・チャンバ701では、空気を酸素と混合してもよい。またチャンバ701は、ルーツ・ブロワ702の入口側で生成されるノイズを吸収する働きもする。ルーツ・ブロワ702(たとえばブラッシュレスDCモータによって駆動される)は、ロータリ容積式装置であり、この装置では、ガス混合物にエネルギーを加えて、患者にガスを所望のフローおよび圧力で供給する。
【0073】
一実施形態においては、ルーツ・ブロワ702は、速度、フロー、差圧、および関連するフロー・データにより特徴付けられてもよい。これらは、電子メモリに記憶されて、人工呼吸器プロセッサ443がブロワを交互に加速および減速して、吸気を引き起こし呼気を可能にする際に使用される。アナログ位置センサ(たとえば、ホール・センサ)が、モータ内のロータ位置を測定し、このロータ位置から、ブロワ・プロセッサ445が、ルーツ・ブロワ702の回転速度を算出してもよい。差圧トランスデューサ703によって、ブロワ内の圧力が測定される。人工呼吸器プロセッサ443(ブロワ・プロセッサ445とともに動作する)は、吸気相の全体を通してブロワ速度を調整して、所望のフロー、体積、および圧力を実現してもよい。ソレノイド・バルブ704および705によって、差圧トランスデューサ703に対するオート・ゼロ能力が得られる。
【0074】
ルーツ・ブロワ702のガス出口側のサイレンサ・チャンバ706によって、ブロワ・ノイズが低減される。そして、ガスが、バイアス・バルブ707(たとえば5cmH2Oまたは概ね5cmH2Oに設定される)を通って移動する。
【0075】
患者フロー・トランスデューサ708、即ち固定オリフィス差圧型トランスデューサによって、患者との間のフローが測定される。過圧リリーフ・バルブ709および準大気圧リリーフ・バルブ710が内部にあり、これらによって、重大な人工呼吸器動作不良が起きた場合の患者の安全性を保証するためのフェイル・セーフ機構が実現されている。MIP/NIFロックアウト・コイル711が、準大気圧リリーフ・バルブ710に含まれており、最大吸気圧(MIP)手順の間にバルブが開口することが防止される。
【0076】
圧力トランスデューサ・モジュール712によって、システムの基本的な圧力測定能力が実現される。たとえば、3つの圧電抵抗式圧力トランスデューサによって、フロー・センサ差圧トランスデューサ713が形成されて、患者フロー・トランスデューサ708と気道ゲージ圧力トランスデューサ714との差圧を測定して、患者気道内の圧力を評価する。ソレノイド・バルブ715および716によって、フロー・センサ差圧トランスデューサ713に対するオート・ゼロ能力が実現される。一方で、バルブ717および718は、ブロワ出口からの乾燥ガスを、患者フロー・トランスデューサ検知ラインを通して、パージ・サイクルの一部として、周期的に送る。
【0077】
呼気制御モジュール719によって、患者は、所望のPEEPに基づいて呼気することができる。吸気する間、呼気制御ソレノイド720は、ブロワ出口からのガス圧力を、呼気バルブ721の風船ダイアフラムに供給して、呼気バルブが閉じる。呼気する間、パイロット圧力アキュームレータ722から風船にパイロット圧力が供給されて、PEEPレベルが確立される。アキュームレータ722におけるパイロット圧力は、パイロット・イン・ソレノイド・バルブ723およびパイロット・アウト・ソレノイド・バルブ724のパルス幅変調(PWM)を通して、パイロット圧力トランスデューサ725からのフィードバックを用いて、制御される。
【0078】
酸素ブレンディングおよびネブライザ・ドライブは、ブレンダ・モジュール726において制御される。加圧ガスは、外部供給源726から受け入れられ、フィルタリングされて、チャンバ701内に供給される。これは、関連するオリフィスを有するソレノイド・バルブ727、728、729、および730のPWM制御の下で行なわれる。各ソレノイド・バルブのオリフィスの特徴づけは、初期アセンブリの間に行なってもよく、また関連するフロー・データは、モジュール726内のPCB上の電子メモリに記憶してもよい。O2圧力トランスデューサ731によって、バルブ入口圧力が測定される。入口圧力、記憶されたオリフィス特徴付け、およびPWMを用いて、ブレンダ・コントローラは、所望の酸素フロー範囲を送出することができる。ネブライザはソレノイド・バルブ732を駆動し、その関連するオリフィスは、エアロゾル化された薬剤などの内容を、吸気相の間にバルブ727〜730の駆動ポートに送る。内容量は、たとえば、6lpmまたは概ね6lpmの酸素フローであってもよい。付加されたネブライザ・フローを補償するために、システム・ソフトウェアが酸素の送出および体積を調整してもよい。
【0079】
前述したように、可変速度ルーツ・ブロワ702は、人工呼吸器プロセッサ443によって、必要に応じて、交互に加速および減速されて、吸気および呼気を引き起こす。代替的な実施形態においては、ルーツ・ブロワ702は、人工呼吸器プロセッサ443によって比較的一定の速度に維持される。その結果、比較的一定のガス・フローが、患者の肺の換気に好適な流量および圧力で生成される。患者へのガス・フロー、吸気を引き起こす開口、および呼気を可能にする閉鎖を制御するために、下流フロー制御バルブが利用される。この代替的な実施形態においては、各ルーツ・ブロワ702の一意の圧力およびフロー出力を、製造中に測定する必要はなく、また人工呼吸器プロセッサ443による使用に備えて、個別化されたブロワ特徴付けデータを記憶する必要はまったくない。
【0080】
III.呼気制御サーボの実施形態
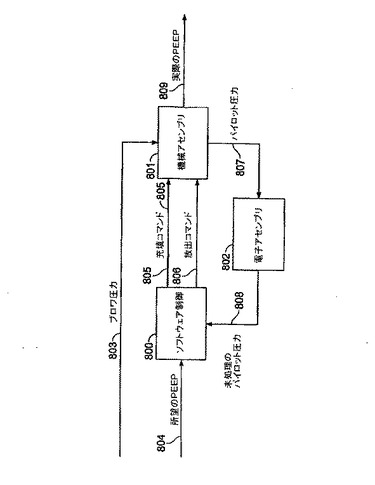
本発明の1つまたは複数の実施形態においては、所望のPEEP圧力値から実際のPEEP圧力を生成するために、呼気制御サーボを実施する。所望のPEEP圧力値は、PEEP圧力を表わすデジタル値である。実際のPEEP圧力は、ルーツ・ブロワ702のブロワ圧力から生成される、制御された単位面積当たりの力である。呼気サーボは、デジタル・ドメインから空圧系ドメインへのこの変換を実現するための電気機械装置を備えている。
【0081】
図8は、本発明の実施形態による呼気サーボ・ループを示すブロック図である。図8の呼気制御サーボには、ソフトウェア制御ブロック800、機械アセンブリ801、および電気的アセンブリ802が含まれている。動作中、ソフトウェア制御ブロック800は、デジタルの所望のPEEP値804(たとえば、人工呼吸器プロセッサ443から)と、現在の未処理のパイロット圧力808のデジタル値とを受け取り、そしてサーボ・ループの出力圧力を増加させるための充填コマンド805と、出力圧力を低減するための放出コマンド806とを生成する。コマンド805および806は、電気的な形式(たとえば、デジタル)である。
【0082】
機械アセンブリ801は、ソフトウェア制御800からの充填および放出コマンド(805、806)とともに、物理的なブロワ圧力803を、空圧系の形式で受け取る。機械アセンブリ801は、充填および放出コマンドに基づいてブロワ圧力803を印加して、パイロット圧力フィードバック値807と実際のPEEP値809とを、両方とも空圧系の形式で生成する。電子アセンブリ802は、パイロット圧力807を未処理のパイロット圧力信号808に変換する。パイロット圧力信号808は、ソフトウェア制御800による処理に備えてデジタル形式である。
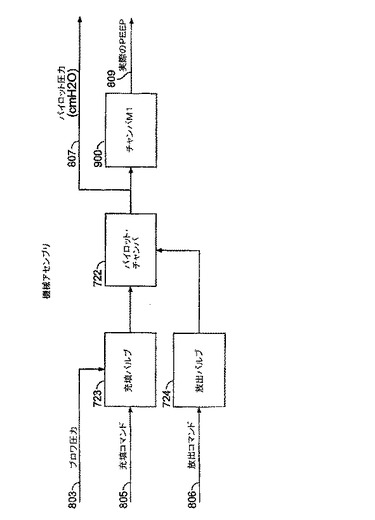
【0083】
図9Aは、本発明の実施形態による機械アセンブリ801のブロック図である。機械アセンブリ801では、充填コマンド805が充填バルブ723に供給されて、パイロット・チャンバ722内に解放されるブロワ圧力803の量が制御される。パイロット・チャンバ722からの圧力の解放を制御するために、放出コマンド806が放出バルブ724に供給される。一実施形態においては、充填コマンド805および放出コマンド806は、PWM信号として実施される。パイロット・チャンバ722によって、バルブ723および724を開口および閉鎖する圧力効果が蓄積される。蓄積圧力は、パイロット圧力807として出力される。チャンバ900によって、呼気制御バルブの風船ダイアフラムが具体化されてもよく、その結果、実際のPEEP圧力809が活性化される。
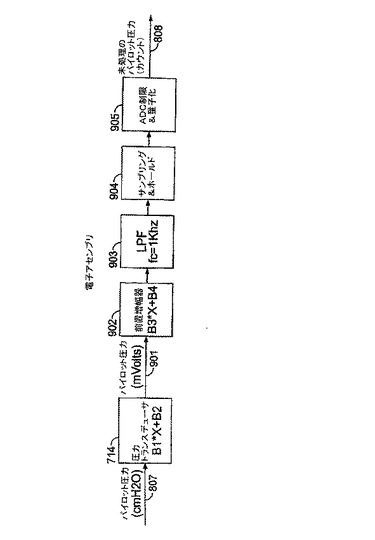
【0084】
図9Bは、電子アセンブリ802の実施形態のブロック図である。パイロット圧力807は、圧力トランスデューサ714によって、パイロット圧力検知信号901に変換される。前置増幅器902によって、パイロット圧力検知信号901が増幅され、ロー・パス・フィルタ903によって、増幅信号内のわずかなノイズおよび上部高調波も取り除かれる。増幅およびフィルタリングされた検知信号は次に、サンプルおよびホールド回路904によってサンプリングされ、その後に、ADCブロック905において、デジタルの未処理のパイロット圧力値808に変換される。
【0085】
図9Cは、ソフトウェア制御ブロック800の実施形態のブロック図である。ブロック906では、所望のPEEP値804が、所望のパイロット圧力値907を生成するための関数に適用される。ブロック906において実施される関数は、与えられたPEEP値に対するパイロット圧力の既知の(すなわち、校正された)値に基づく単純なテーブル索引であってもよい。あるいは、その関数は、チャンバ900に入力されるパイロット圧力と結果的に生じるPEEP値との間の関係の逆に近い数学的なモデルであってもよい。
【0086】
デジタル・ロー・パス・フィルタ908は、未処理のパイロット圧力信号808と、所望のサーボ・ループ応答を維持するために信号を送るバンドリミットとを受け取る。ブロック909では、ブロック714内のトランスデューサの特性の逆に近い数学的関数を実施する。トランスデューサの作用によるパイロット圧力値のわずかな変動も、ブロック909によって補正される。
【0087】
ブロック909に対する数学的なモデルは、製造中にトランスデューサを校正すること、および未処理のおよび実際のパイロット圧力値を記憶することによって、形成してもよい。そして、トランスデューサの効果をほぼ逆にするように、数学的な方程式を構築してもよい。これは、最小2乗法の曲線フィッティングまたは同様の技術を校正データに適用することを通して、方程式に対する係数を決定することによって、行なわれる。
【0088】
ブロック911では、所望のパイロット圧力907および実際のパイロット圧力910を比較して誤差値を決定した後、その誤差値を、アルゴリズム(たとえば、PIまたはPIDアルゴリズム)の制御に適用して、充填コマンド805および放出コマンド806を生成する。一実施形態においては、充填および放出コマンドのバイナリ状態は、周期的な間隔で決定される。測定されたパイロット圧力が、所望のパイロット圧力を閾値量だけ超える場合には、放出コマンドをその間隔の間活性化するが、測定されたパイロット圧力が、所望のパイロット圧力を、閾値量を超えて下回る場合には、充填コマンドをその間隔の間活性化する。測定されたパイロット圧力が、所望のパイロット圧の閾値範囲内にある場合には、どちらのコマンドも活性化しない(そのままの状態を電流間隔の間、維持する)。
【0089】
IV.ルーツ・ブロワ・アセンブリの実施形態
本発明には、機械的人工呼吸器内のコンプレッサを駆動するために用いてもよい電動モータの精密速度制御が含まれる。機械的人工呼吸器は、種々の動作モード、たとえば圧力制御および体積制御を有していてもよい。ほとんどの機械的人工呼吸器の間で共通する1つのスレッドは、所望の動作モードは、ガス・コンプレッサが生成するガス流量を制御することによって達成される、ということである。ブロワ・アセンブリに対する好適なコンプレッサ制御システムの例が、以下の文献でさらに説明されている。米国特許出願第10/847、693号明細書(2004年5月18日出願)。なお、この文献の明細書および図は本明細書において参照により取り入れられている。
【0090】
一実施形態においては、コンプレッサ・モータは、ブラッシュレスDC(BLDC)モータであって、このモータによって、携帯型機械的人工呼吸器内でコンプレッサとして用いられるルーツ・ブロワが駆動される。コンプレッサがもたらす流量および圧力は、BLDCモータの速度によって制御される。従来技術のシステムでは、デジタル・ホール効果センサを用いてロータ位置の別個のサンプルを取得し、別個の速度トランスデューサを用いて、BLDCモータの速度フィードバックを取得しているが、この従来技術とは異なり、本発明の実施形態では、アナログ・センサ(たとえば、アナログ・ホール効果センサ、異方性磁気抵抗(AMR)センサなど)を用いて、連続的なロータ位置およびクローズド・ループ制御に対する速度フィードバックを取得してもよい。
【0091】
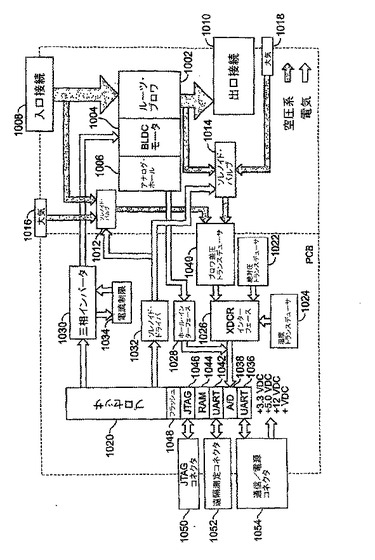
図10は、本発明の実施形態によるモータ/コンプレッサ・システムのブロック図である。この説明図では、モータ/コンプレッサ・システムは、BLDCモータ1004に結合されたルーツ・ブロワ1002を備えている。ルーツ・ブロワ1002にはガス(すなわち、空気)が、入口1008を通って入る。入口1008からの空気は、ルーツ・ブロワ1002によって圧縮された後、患者および/または機械的人工呼吸器の他のセクションへ、出口1010を通して送られる。流体伝達経路は、ルーツ・ブロワ1002のソレノイド・バルブ1012への入力と、ルーツ・ブロワ1002のソレノイド・バルブ1014への出力とによって与えられる。また大気圧力が、ソレノイド・バルブ1012および1014に、大気入口1016および1018を介して、それぞれ送られる。
【0092】
ソレノイド・バルブ1012および1014の出力流体伝達チャンネルが、ブロワ差圧トランスデューサ1040に与えられ、2つのチャンネル間の圧力差を変換して、その圧力差を表わす電気信号にする。通常動作時は、トランスデューサ1040によって、ルーツ・ブロワ1002の出力圧力と入力圧力との間の差が測定される。ソレノイド・バルブ1012および1014を制御することによって、トランスデューサ1040は、トランスデューサ1040の「オート・ゼロ」位相の間に、2つの大気入口の間の圧力差を測定することもできる。プロセッサ1020によって、ソレノイド・バルブ1012および1014の制御が実現される。その際、ソレノイド・ドライバ1032が、プロセッサ1020からのデジタル制御信号を変換して、ソレノイド・バルブを駆動できる電源DC信号にする。
【0093】
絶対圧トランスデューサ1022および温度トランスデューサ1024によって、絶対圧レベルおよび温度を表わす電気信号が生成される。トランスデューサ1022、1024、および1040はそれぞれ、トランスデューサ(XDCR)インターフェース・ブロック1026に接続されている。トランスデューサ(XDCR)インターフェース・ブロック1026は、アナログ信号の信号増幅およびフィルタリングを行なってもよく、アナログ信号はその後、A/D(アナログ・デジタル)コンバータ回路1038に送られる。A/Dコンバータ1038によって、アナログ信号がデジタル値に変換される。デジタル値は、プロセッサ1020によって処理されてもよい。
【0094】
A/Dコンバータ回路1038に加えて、プロセッサ1020は、以下の関連回路も有する。すなわち、フラッシュ・メモリ1048、JTAG試験回路1046、ランダム・アクセス・メモリ(RAM)1044、およびUART(汎用非同期受信送信器)1042および1036である。外部JTAGコネクタ1050が、JTAG回路1046に接続されて、JTAG規格に基づくハードウェア試験およびデバッギングを容易にしている。遠隔測定コネクタ1052が、UART1042に接続されている。これは、測定された人工呼吸器パラメータを、リモート・システムに、たとえばモニタリング目的で送信するためである。通信および電源コネクタ1054が、UART1036に接続されている。これは、人工呼吸器システムとのさらなる外部通信を、たとえば動作上の試験および制御のために行なうことを容易にするためである。またコネクタ1054によって、任意の必要な電源信号が、モータ/コンプレッサ・システム(たとえば、3.3、5.0、および/または15VDC(ボルトDC))に送られる。
【0095】
アナログ・センサ1006(たとえば、アナログ・ホール効果センサ)が、円形パターンのPCボード上に配置されている。このPCボードは、BLDCモータ1004のロータ・シャフトに垂直で、およびロータ・シャフトの端部に取り付けられた二極磁石に隣接するものである。アナログ・センサ1006から、BLDCロータ位置の算出に必要な測定値が得られる。センサ1006のアナログ出力は、センサ・インターフェース1028を通して送られて(たとえば、増幅およびフィルタリングのために)、そしてA/Dコンバータ回路1038内に至る。A/Dコンバータ回路1038では、アナログ・センサ信号はデジタル値に変換されて、プロセッサ1020内での処理に備える。
【0096】
プロセッサ1020は、モータ/コンプレッサ制御ループのある特定の要素を実施するために、ソフトウェア命令を実行する。プロセッサ1020は、たとえば、汎用プロセッサまたはデジタル信号プロセッサ(DSP)によって実施してもよい。他の実施形態では、プロセッサ1020の機能を実施することを、ファームウェア(たとえば、EPROM内に記憶された命令)で行なってもよいし、またはハードウェア装置(たとえば、ASIC(特定用途向け集積回路)もしくはFPGA(フィールド・プログラマブル・ゲート・アレイ))における等価なロジックとして、行なってもよい。
【0097】
プロセッサ1020は、デジタル化されたセンサ信号および圧力測定値を、A/Dコンバータ・ブロック1038(値は、RAM1044を一時記憶用に用いる)を介して受け取り、実施される制御プロセス(たとえば、圧力制御または体積制御)に基づいて、適切な速度制御値を決定する。またプロセッサ1020は、電流転流状態が与えられたとして適切な転流制御信号を生成し、この転流制御信号のパルス幅を、速度制御値に基づいて変調する。三相インバータ1030には、変調された転流制御信号が入力される。
【0098】
三相インバータ1030によって、BLDCモータ1004内の個々のステータ・コイルに対して駆動信号が生成される。これは前述の通りである。またシステムは、三相インバータ・ブロック1030に接続される電流制限回路1034を含んでいてもよい。
【0099】
図11は、本発明の実施形態によるルーツ・ブロワの物理的構造の分解組立図である。図示したように、構造1100にはBLDCモータが含まれている。BLDCモータのステータは、中空の穴1108を囲んでおり、この穴1108内には、製造時に、ロータ1101が挿入される。ロータ1101は、BLDCモータ内の電圧印加されたステータ・コイルの影響で回転する。スタビライザ1102は、ロータ1101およびルーツ・ブロワ・インペラ1103が共有する回転軸をサポートしている。BLDCモータが強制的にロータ1101を回転させると、共有軸が強制的にインペラ1103を回転させる。
【0100】
インペラ1103は、インペラ軸の一方の端部がギア1105に結合された状態で、ルーツ・ブロワ・ハウジング1104内で回転する。また第2のインペラ(図示せず)が、ギア1105に、この第2のインペラがインペラ1103の対向方向に回転するように、結合されている。動作中、インペラの回転により、空気が強制的にインペラ間を流れて、さらなるエネルギーが生じ、圧力が形成される。ハウジング1104の両側における開口部が、空気の入力および出力経路となっている。
【0101】
図示したように、ブロワ・アセンブリの要素は、幅広のコネクタ1106によって周囲構造に横方向に結合され、長尺コネクタ1107によって長手方向に結合されている。これらのコネクタのサイズが大きくなっていることによって、装置に対するサポートが大きくなる一方で、ブロワ装置の運動に起因する振動が減衰される。
【0102】
図12に、ルーツ・ブロワ・インペラ1103および1203が連動する様子を例示する。この図では、インペラ1103およびロータ1101の共有軸が見えており、ルーツ・ブロワ・インペラが駆動されるメカニズムが示されている。ギア1201および1202の歯合によって、インペラ1103の軸からの対向する回転エネルギーが、インペラ1203の軸に移動する。
【0103】
V.ノイズ減少
ルート・ブロワは比較的騒音が多いため、および本発明の実施形態は、患者に極めて接近した状態で用いるように設計されているため、ブロワが生成するノイズを減衰させるための1つまたは複数の方法および特徴を、本発明の実施形態において実施してもよい。このような方法および特徴には、螺旋状のねじれ(図12に示したような)を有するブロワ・ロータを形成すること、および複数の弱音技術たとえば前述した騒音防止キャンセル方法を用いることが、含まれていてもよい。
【0104】
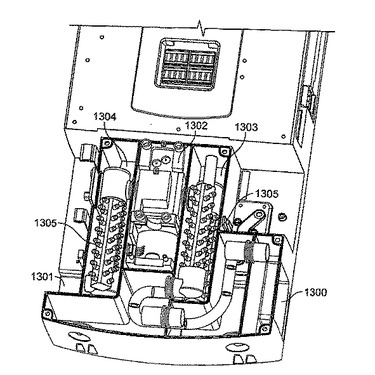
さらに本発明の実施形態には、穿孔チューブ・マフラを用いることが含まれていてもよい。穿孔チューブ・マフラでは、多数の穿孔が、各穿孔チューブのボディから、小さいチューブの形態で直角に突出しており、その結果、マフラ重量およびサイズの増加が伴うことなく音波を効率的に減衰できる、より長い効果的な弱音経路が形成される。穿孔チューブ・マフラは好ましくは、軽量のポリマーまたは他の頑丈だが軽量の材料から形成されている。
【0105】
図13Aに、本発明の一実施形態の空圧系経路およびノイズ減少チャンバの図を示す。図示したように、空気が、フィルタリングされた入口1300を通って人工呼吸器に入り、撚られた空圧系経路を、サイレンサ・チャンバ1303の底部に到達するまで横断する。サイレンサ・チャンバ1303の頂部付近で、空気は、ルーツ・ブロワ・アセンブリ1302の入口ポート内に送られる。圧縮空気は、ルーツ・ブロワ・アセンブリから出力されて、サイレンサ・チャンバ1304の上部内に至り、そしてチャンバ1304の底部(1301)から送られる。
【0106】
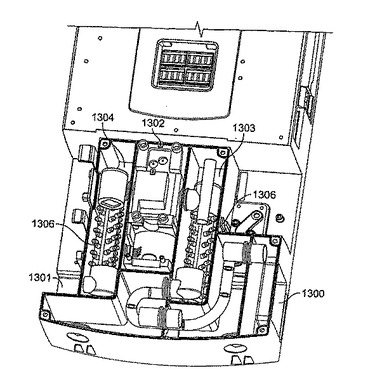
サイレンサ・チャンバ1303および1304にはそれぞれ、2つの穿孔されたマフラ・チューブ1305および1306が含まれている。これらは平行に、たとえば上下に、配置されている。図13Bに、頂部チューブ(1305)を取り除いたサイレンサ・チャンバを例示する。この結果、その下にあるチューブ1306のより明瞭な図が得られている。各サイレンサ・チャンバへの入力は、チューブ1305の一方の端部を通して行なわれ、排出は、対向する端部チューブ1306を通して行なわれる。したがって、空気は、チューブ1305から外へ流れて、チューブ1306を通って中へ流れる。コンプレッサ・ノイズに関連する圧力過渡現象は、小さい管状の穿孔が示す抵抗によって減衰される。さらに、ノイズ圧力波のコヒーレンスは、長さが異なる複数の小さい経路を強制的に横断させることによって、分散される。経路の長さが異なることで、個々の経路の空気流が、互いと位相がずれた状態で再結合するため、これまでコヒーレントだったノイズが拡散される。その結果、ほとんどのコンプレッサ・ノイズは、サイレンサ・チャンバを通過する間に減衰する。
【0107】
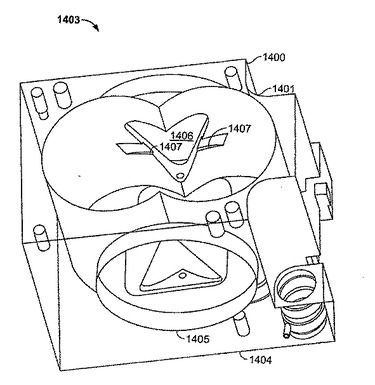
また本発明の実施形態には、ルーツ・ブロワのハウジング内に段階的スロットが含まれていてもよい。段階的スロットによって、ブロワ・ロータの前縁がブロワ出口ポートに近づくにつれて、徐々にガスを滑らかに逆流させることが可能になるため、ほとんどのノイズの原因である典型的なルーツ・ブロワ・パルシング効果が小さくなる。ルーツ・ブロワのハウジング内に段階的スロットを設けることによって、ノイズ減少が最大になる一方で、回転中にブロワ・チャンバ内に徐々に逆流させることを可能にする際の効率の減少が最小になる。
【0108】
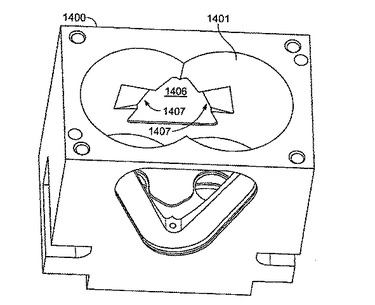
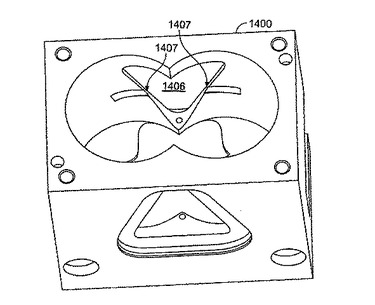
図14A〜4Dに、ルーツ・ブロワ・ハウジング1400の種々の図を示す。オリフィス1401は、BLDCモータの方向に向いており、インペラ対を収容する。ハウジング1400の対向面1402には、2つのオリフィスが設けられている。この2つのオリフィスを通って、インペラの軸が延びて、ギア構造1105と嵌合している。オリフィス1401および対向面1402によって規定される軸に垂直に、空気入口1403および圧縮空気出力ポート1404が設けられている。入口および出力ポートは、たとえば、初期円形のくぼみ1405によって、管状の空気ガイド装置を受け入れるように構成されている。円形のくぼみ内には、くぼみ1405の面において概略三角形の断面と、湾曲した羽形状をと有するオリフィス1406があり、三角形のカット・アウトが、回転インペラを取り囲む二重の円形状に形成されたチャンバに接触している。また、溝1407が、オリフィス1406の内部に、三角形の辺に沿って概ね中間に、インペラの積み重ねと同じ平面内にアライメントされて、形成されている。溝1407は、三角形オリフィス1406の縁において最も深く、オリフィス1406から離れるに従って徐々に浅くなって、内部チャンバの面に至る。
【0109】
前述した技術、方法、および特徴によって、ルート・ブロワに一般的に関連するノイズが減り、患者に対するわずかな聴覚の不快感も最小になる。その結果、人工呼吸器装置を、患者に極めて接近した状態で用いることが、本発明の実施形態の重量または寸法をそれほど増やすことなく可能になり、そのため、携帯性が促進される。
【0110】
前述したノイズ減少技術と共にルーツ・ブロワの人工呼吸器において用いることにより、これまでは高性能な換気モードまたは患者の快適さを犠牲にしなければ達成できなかった人工呼吸器の小型化を改善することができる。
【0111】
以上、携帯型人工呼吸器について説明した。本明細書で説明した特定の実施形態は、単に例示的なものであり、それによって本発明を限定するものではない。本発明は、請求項およびそれらの均等物の完全な範囲によって、規定される。
【技術分野】
【0001】
本発明は、医療用人工呼吸器の分野に関し、より具体的には、自給式の携帯型人工呼吸器に関する。
【背景技術】
【0002】
従来、呼吸支援が必要な患者に対する人工呼吸器は、大きく、かつ重く、電力を必要とする装置であった。そのため、このような装置とともに患者が移動することは、まったくできないか、ほとんどできない状態であった。コンプレッサ技術における最近の進歩、たとえば、米国特許第1、152、135号明細書(デブリーズ(DeVries)らに付与)に記載されているものでは、人工呼吸器のサイズおよび電力に対する要求が小さくなり、ある程度の自給式の携帯性が実現できた人工呼吸器の製造が初めて可能になっている。バッテリ・パックを装備することで、これらの携帯型人工呼吸器は、車椅子に取り付けることが可能になった。その結果、患者は、人工呼吸器を主電源に接続することなく、ある程度の時間、動き回れるようになっている。
【0003】
従来技術の人工呼吸器は、小型で持ち運び易くなっている一方で、複雑な呼吸モードを送出する能力の維持を、通常は低圧ロータリ・ドラッグ・コンプレッサを呼吸送出メカニズムとして用いることにより、行なっている。ドラッグ・コンプレッサは、可変速度の場合もあるし、一定速度の場合もある。可変速度の人工呼吸器コンプレッサの場合は、停止状態から急速に加速することによって動作して、患者に対する吸入支援(吸気)を実現し、次に急速に減速して、患者の呼気を可能にする。従来技術の可変速度コンプレッサ人工呼吸器の急速な加速および減速では、コンプレッサの駆動回路が非常に高い電流を取り扱う必要がある。そのため、人工呼吸器が主電源に接続されていない場合には、大きくて扱いにくい高価な電源システムおよび相当量の予備バッテリ電源が必要になる。
【発明の概要】
【発明が解決しようとする課題】
【0004】
一定速度のコンプレッサの場合は、可変速度コンプレッサの大きくて扱いにくい電源システムは必要ではないが、固有の非効率さがある。その理由は、コンプレッサは、患者に空気がまったく供給されていないとき(たとえば呼気の間)であっても、動作および電力消費を続けるからである。消費電力は、呼気の間、コンプレッサの出力空気流をコンプレッサの取入口まで再循環させることによって、減らすことができる。しかし消費電力が減ったとしても、人工呼吸器がオン・ボード・バッテリ電源によって動作できる時間は、著しく短くなる可能性がある。
【課題を解決するための手段】
【0005】
本発明は、小型、低慣性、高速度、高効率の可変速度モードのルーツ型ブロワを用いる携帯型人工呼吸器を備える。ルーツ型ブロワは、高効率および小サイズであることが知られている。しかし、ルーツ型ブロワは、本来的に騒音が多く、従来、医療用人工呼吸器での利用には適していなかった。医療用人工呼吸器では、過剰なノイズがあると、24時間対応の呼吸支援を必要とすることが多い患者に悪影響を及ぼすからである。本発明の人工呼吸器では、従来技術のルーツ型ブロワのノイズ問題を、ルーツ・ブロワ・ハウジング上の新しいノイズ低減圧力補償オリフィスと、人工呼吸器のハウジング内の複数のバッフリング・チャンバとを組み合わせて用いることにより、克服している。可変速度モードのルーツ型コンプレッサを、特別に構成されたフロー制御および電源システムと共に用いることで、全体として、人工呼吸器のサイズおよび消費電力の両方が低減される。本発明の実施形態により、完全な人工呼吸器機能性(体積および圧力制御モードの両方で動作する能力を含む)が小型の携帯型のユニットにおいて提供される。このようなユニットは、本当の移動し易さを初めて患者にもたらすものである。一実施形態においては、人工呼吸器は、携帯型の内蔵型人工呼吸器であり、小型のラップトップ・コンピュータのサイズに近い一方で、数時間の間、バッテリで電源供給を受けてフル・サービスの呼吸支援を実現する。
【0006】
本発明の1つまたは複数の実施形態においては、人工呼吸器は、より重くてより慣性が大きいルーツ・ブロワを一定速度モードで用いる。ルーツ・ブロワは効率が優れているため、サイズおよび重量を、複雑な呼吸モードを送出できるフル機能の人工呼吸器において以前は達成不可能な程度にまで、小さくすることができる。
【図面の簡単な説明】
【0007】
【図1】本発明の1つまたは複数の実施形態による携帯型人工呼吸器の正面を示す斜視図である。
【図2A】本発明の1つまたは複数の実施形態による携帯型人工呼吸器、ドッキング・クレードルおよび人工呼吸器モニタを含む人工呼吸器システムの正面を示す斜視図である。
【図2B】図2Aの人工呼吸器システムの裏面を示す斜視図である。
【図3】本発明の1つまたは複数の実施形態による携帯型人工呼吸器システムに対する機能上のアーキテクチャを示すブロック図である。
【図4】本発明の1つまたは複数の実施形態による携帯型人工呼吸器システムに対する電子アーキテクチャを示すブロック図である。
【図5】本発明の1つまたは複数の実施形態によるドッキング・クレードルに対する電子アーキテクチャを示すブロック図である。
【図6A】本発明の1つまたは複数の実施形態による携帯型人工呼吸器システムに対するソフトウェア・アーキテクチャの一般的なコンテキストを例示するブロック図である。
【図6B】本発明の1つまたは複数の実施形態による携帯型人工呼吸器システムに対するソフトウェア・アーキテクチャの一般的なコンテキストを例示するブロック図である。
【図7】本発明の1つまたは複数の実施形態による携帯型人工呼吸器の空圧系図である。
【図8】本発明の1つまたは複数の実施形態による呼気サーボ制御システムのトップ・レベル・ブロック図である。
【図9A】本発明の1つまたは複数の実施形態による呼気サーボ制御システムの機械アセンブリ部分を示すブロック図である。
【図9B】本発明の1つまたは複数の実施形態による呼気サーボ制御システムの電子アセンブリ部分を示すブロック図である。
【図9C】本発明の1つまたは複数の実施形態による呼気サーボ制御システムのソフトウェア制御部分を示すブロック図である。
【図10】本発明の1つまたは複数の実施形態によるブロワ・アセンブリを示すブロック図である。
【図11】本発明の1つまたは複数の実施形態によるブロワ・アセンブリを示す分解組立図である。
【図12】本発明の1つまたは複数の実施形態による一対のルーツ・ブロワ・インペラを示す斜視図である。
【図13A】本発明の1つまたは複数の実施形態による穿孔チューブ、を伴うサイレンサ・チャンバを有する人工呼吸器装置を示す図である。
【図13B】本発明の1つまたは複数の実施形態による穿孔チューブ、を伴うサイレンサ・チャンバを有する人工呼吸器装置を示す図である。
【図14A】本発明の1つまたは複数の実施形態による空気出口における段階的スロットを例示するルーツ・ブロワ・ハウジングを示す図である。
【図14B】本発明の1つまたは複数の実施形態による空気出口における段階的スロットを例示するルーツ・ブロワ・ハウジングを示す図である。
【図14C】本発明の1つまたは複数の実施形態による空気出口における段階的スロットを例示するルーツ・ブロワ・ハウジングを示す図である。
【図14D】本発明の1つまたは複数の実施形態による空気出口における段階的スロットを例示するルーツ・ブロワ・ハウジングを示す図である。
【発明を実施するための形態】
【0008】
携帯型人工呼吸器システムについて説明する。以下の説明では、本発明のより十分な説明が得られるように、多くの具体的な詳細、たとえば1つまたは複数の実施形態に対する物理的寸法について述べる。しかし、当業者には明らかなように、本発明は、これらの具体的な詳細なしで実行してもよい。他の場合には、良く知られている特徴については、本発明が不明瞭とならないように、詳細には説明していない。
【0009】
本発明の実施形態では、可変速度モードで動作するルーツ型ブロワを、呼吸送出メカニズムとして用いる携帯型人工呼吸器を実施する。ルーツ型ブロワを用いることで生じる効率および小型化に対する要求と、新しい弱音技術および電子制御システムとによって、人工呼吸器を、パームトップ・コンピュータに匹敵するサイズにまで小さくすることができる。重量および消費電力も同様に小さくなり得る。本発明の人工呼吸器により、連続的な呼吸支援を必要とする患者に対して、向上された移動のし易さがもたらされるため、患者の生活の質の著しい改善が促進されることになる。
【0010】
I.携帯型人工呼吸器、ドッキング・クレードル、およびモニタを有する人工呼吸器システムの実施形態
本発明の1つまたは複数の実施形態においては、携帯型人工呼吸器システムには、携帯型人工呼吸器、ドッキング・クレードル、およびモニタが含まれる。携帯型人工呼吸器は好ましくは、必ずしも必要ではないが、小型、軽量、自給式の救命装置で、非常に携帯型である。静止状態での応用例では、携帯型人工呼吸器は、ドッキング・クレードル内に配置してもよい。ドッキング・クレードルは、単純な構造支持体としての機能を果たす(おそらく電源および/または再充電システムが含まれる)か、携帯型人工呼吸器のインターフェース能力を増大する。たとえば、ドッキング・クレードルには、表示能力を拡張するためのグラフィックス・モニタが含まれていてもよい。
【0011】
A.携帯型人工呼吸器エンクロージャ
1つまたは複数の実施形態においては、携帯型人工呼吸器は、モールドされたエンクロージャ内にパッケージされていてもよい。実施形態によっては、エンクロージャは、軟質ゴムブートと共成型される。好ましくは、必ずしも必要ではないが、エンクロージャは、比較的コンパクトなフォームファクタを有するように構成される。たとえば一実施形態においては、10インチ(25.4センチメートル)×6インチ(15.24センチメートル)×2インチ(5.08センチメートル)のエンクロージャに、患者が非常に携帯型のユニットから適切な人工呼吸器サポートを受け取るのに必要な装置を、収容してもよい。他の実施形態では、種々のフォームファクタを有するエンクロージャを用いてもよい。
【0012】
図1は、本発明の1つまたは複数の実施形態による携帯型人工呼吸器の正面の斜視図を例示する図である。例示した実施形態においては、空圧系接続部101を、たとえば、人工呼吸器エンクロージャ100の中央線の下方において、左側および右側に形成してもよい。電気的相互接続102を、エンクロージャ100の裏面の下端に形成してもよい(たとえば、クレードル・インターフェースを設けるために)。また電気的相互接続は、たとえば中央線の上方において、エンクロージャ100の左側および/または右側に形成してもよい。
【0013】
人工呼吸器エンクロージャには、ユーザ・インターフェース106が含まれていてもよい。たとえば、ユーザ・インターフェース106を、LEDおよびメンブレン・スイッチ・パネルを用いる一実施形態において、比較的安価に実施してもよい。他の実施形態では、カラーLCDおよびタッチ・スクリーンを用いたグラフィカルユーザ・インターフェース106を実施してもよい。
【0014】
1つまたは複数の実施形態においては、人工呼吸器エンクロージャ100の頂部に、折り畳み式の取っ手103が含まれていてもよい。取っ手103は、折り畳まれるとテーブル・スタンドとしての機能を果たし、エンクロージャに対する面一性がなくなるようにする。ハンド/ショルダ・ストラップ接続点104を、エンクロージャ100に形成してもよい。また、1つまたは複数の実施形態においては、エンクロージャ100の裏面部に薄型のダブテール・スタイルのマウンティング・メカニズムを設けることで、マウントしないデスクトップ適用例と干渉することなく、ポール、壁、またはベッド・レールへの搭載を容易にしてもよい。
【0015】
1つまたは複数の実施形態においては、エンクロージャ100上にバッテリ・ポート105を設けて、内部リムーバブル・バッテリ・パックを収容してもよい。バッテリ・ポート105に、ラッチおよびイジェクト・メカニズムを取り付けて、使用中に信頼性良く接続できることと、エンクロージャがクレードル(後述する)内に設置されている場合でもリムーバブル・バッテリ・パックを容易に交換できることとを、保証することが好ましい。
【0016】
エンクロージャ100は、立設されたサポートに対してドッキング・クレードル内に置くように、および/または携帯型人工呼吸器とクレードル電子機器との間の接続を確立するように、設定してもよい。以下、ドッキング・クレードルの実施形態について説明する。
【0017】
B.ドッキング・クレードルおよびモニタ
図2Aおよび2Bに示すのは、本発明の1つまたは複数の実施形態による携帯型人工呼吸器、ドッキング・クレードル、およびモニタを備える携帯型人工呼吸器システムの正面および裏面部の斜視図である。図示したように、ドッキング・クレードル200には、ベース201Aおよびクレードル・アーム201Bが含まれていてもよい。人工呼吸器モニタリング能力を拡張して表示するために、アーム201Bにモニタ202を取り付けてもよい。レードル200のベース201A内にドッキングされている携帯型人工呼吸器エンクロージャ100が示されている。
【0018】
1つまたは複数の実施形態においては、ベース201Aは、内部電源またはロジック・コンポーネントがまったくない単純なテーブル・スタンドとして機能するように、設計される。しかし、ほとんどの実施形態においては、内部電子機器が含まれており、電源を供給すること、および携帯型人工呼吸器のインターフェース能力を拡張することが可能なインテリジェント・ドッキング・ステーションとなっている。後者の場合には、ベース201Aによって、ドッキングされた人工呼吸器との電気的相互接続(たとえば、人工呼吸器の下部、裏面端部を通して)が、実現される。付属のモニタ202に対するサポートが実現されるように、ベース201Aには、アーム201Bが取り外し可能に取り付けられていてもよい。クレードル・ベース201A内の電子機器とモニタ202との間の電源およびデータ・ケーブルは、アーム201Bの構造内に収容してもよい。
【0019】
クレードル200には、ドッキングされた人工呼吸器が落下しないことを保証するために、機械的な連結装置が含まれていてもよい。人工呼吸器エンクロージャ100の場合と同様に、クレードル200には、ダブテール・スタイル・マウンティング・メカニズムが組み込まれており、壁またはベッド・レールへの搭載が容易になっていてもよい。ドッキング・クレードル200およびモニタ202にはそれぞれ、射出成形されたコンポーネントが含まれていてもよい。
【0020】
C.人工呼吸器システム機能上のアーキテクチャ
図3は、本発明の1つまたは複数の実施形態による人工呼吸器システムの機能上のアーキテクチャのブロック図である。人工呼吸器空圧系は、ルーツ・ブロワ300に基づいていてもよい。ルーツ・ブロワ300は、部屋の空気を入口フィルタ310を通して取り込んで、加圧ガスを吸気ポート311を通して患者に送る。空圧系システムは、シングル・リムおよびデュアル・リム患者回路の両方をサポートしてもよい。その結果、呼気バルブ301を、人工呼吸器エンクロージャ100に対して、外部で実装することもできるし、内部で実装することもできる。呼気制御ポート302およびPEEP(呼気終末陽圧:Positive End-expiratory Pressure)制御303によって、パイロット圧力が生成される。パイロット圧力は、吸気中に呼気バルブ301を閉じ、呼気中に、ソフトウェア制御されたPEEPパイロット圧力に対して、呼気バルブ301を開く。スカベンジング・ポート316を用いて、呼気中に患者が用いない圧縮空気を再生利用または再循環させてもよい。
【0021】
人工呼吸器100は、付属の内部O2ブレンダ304を用いて、ブレンドされたガスを送ってもよい。吸気リム312内のブレンド・ガス送出は、FIO2インターフェース313に接続された外部FIO2(吸気酸素の部分)センサ305を介してモニタしてもよく、またユーザ・インターフェース306上に表示してもよい。同様に、患者の血液O2レベルも、付属の内部パルス・オキシメータ307に接続された外部パルス酸素センサ314を介してモニタしてもよいし、またユーザ・インターフェース306上に表示してもよい。O2入口ポート308に高圧酸素が供給されたときに、人工呼吸器100は、エアロゾル化された薬を患者に送るために外部ネブライザ309を駆動してもよく、同時に、付加されたガス送出を補償する。
【0022】
1つまたは複数の実施形態においては、Y字型の(「Y」)接合部325を用いて、吸気リム312および呼気リム326を、患者までのメイン人工呼吸器チューブに結合させる。Y字型の接合部325からの気道およびフロー・センサ・ライン327が、検知ポート328を介して、人工呼吸器エンクロージャ100に通じる。トランスデューサ(XDCR)マニフォールド329は、検知ポート328からの気道およびフロー値を電気的な検知信号に変換して、人工呼吸器制御ループ内で用いる。
【0023】
1つまたは複数の実施形態においては、携帯型人工呼吸器(100)は、外部電源コネクタ317を通して(たとえば、外部バッテリ充電器318A、外部バッテリ318B、AC/DCアダプタ318C、DCバス318Dなどから)受け取った外部供給のDC電源により、動作する。クレードル・インターフェース319によって、ケーブル・プラグ・インを用いることなく人工呼吸器に外部電源を供給してもよい。たとえば、人工呼吸器エンクロージャ100を、ドッキング・クレードル200内に置いてもよい。ドッキング・クレードル200では、両装置の接点が自動的に嵌合して、電源経路および/またはデータ経路が実現される。同様に、リムーバブル・バッテリ321をリムーバブル・バッテリ・ベイ320内に配置して、人工呼吸器を携帯型のスタンド・アローンの装置として用いてもよい。人工呼吸器を、内部ブリッジ・バッテリ(322)を用いて構成して、リムーバブル・バッテリ(321)を交換する間に人工呼吸器に連続的に電源が供給されるようにしてもよい。人工呼吸器エンクロージャ100に外部電源を接続したときに、バッテリ充電器323を用いて、リムーバブル・バッテリ321および/またはブリッジ・バッテリ322を充電してもよい。外部リムーバブル・バッテリ充電器(324)を用いて、追加バッテリを充電してもよい。
【0024】
図3に示した実施形態においては、ドッキング・クレードル200には、人工呼吸器インターフェース330が含まれている。人工呼吸器インターフェース330は、人工呼吸器100のクレードル・インターフェース・ブロック319と接続されて、電源を伝達するとともに、クレードル200内部のインターフェース電子機器との電気的な接続部を実現する。クレードル200内の付属の内部AC/DCアダプタ331は、インターフェース・ブロック319および330を介して、人工呼吸器100に対するDC電源をもたらすだけでなく、クレードル200内の回路およびモニタ202へのDC電源をもたらしてもよい。クレードル200は、追加的にまたは代替的に、外部電源(たとえば、電源318A〜318D)からDC電源を受け取るDCコネクタを有していてもよい。
【0025】
クレードル200を用いて、人工呼吸器のインターフェース能力を拡張して、たとえば以下のものを含むようにしてもよい。出力アラーム・ケーブルを有するリモート・アラーム/ナース・コール・インターフェース332;リモート・アクセス・モデム333;ISP/デバッグ・ポート334(サービスおよびメンテナンス・ポート);外部ETCO2センサ335に接続されたETCO2(終末呼気二酸化炭素)モニタ336;患者モニタ・システムをサポートする患者モニタ・インターフェース337(たとえばHPバリューリンク(Valuelink)およびスペースラブス・フレックス(SpaceLabsFlexport)ポート);リムーバブル・メモリ・カード339をサポートするためのリムーバブル・メモリ・カード・スロット338;およびモニタ・インターフェース/コントローラ340。リムーバブル・メモリ・カード339を用いて、人工呼吸器とパーソナル・コンピュータとの間の情報移動を容易にして、データの再検討および印刷に備えてもよい。
【0026】
クレードル200のアーム201Bに結合されているモニタ202は、たとえば波形、ループ、および傾向データを連続的に表わすことができる付属の表示ユニットである。
D.人工呼吸器電子アーキテクチャ
1つまたは複数の実施形態においては、携帯型人工呼吸器電子アーキテクチャを、3つの主要なサブシステムに分割してもよい。すなわち、人工呼吸器コア・サブシステム、ユーザ・インターフェース・サブシステム、および電源サブシステムである。各サブシステムには、種々のデジタル、アナログ、および電源回路とともに、サブアセンブリ中に分配される1つまたは複数のソフトウェア・プログラマブル・マイクロコントローラが、含まれていてもよい。他の実施形態においては、電子アーキテクチャを、異なるラインに沿って分割してもよいし、アーキテクチャをまったく分割しなくてもよい。
【0027】
図4に例示するのは、人工呼吸器電子アーキテクチャの一実施形態であって、人工呼吸器コア(VCサブシステム)401、ユーザ・インターフェース(UI)サブシステム400、および電源サブシステム402を有する場合である。以下、各サブシステムについて、より詳細に説明する。
【0028】
1.人工呼吸器コア・サブシステム
図4の実施形態においては、VCサブシステム401に、携帯型人工呼吸器のコア・ガス送出機能を実施するための電子機器が含まれている。人工呼吸器プロセッサ443上で実行されるソフトウェア・プログラムは、全般的な人工呼吸器コア機能性を制御することを、各機能上のサブアセンブリまたはモジュール内に配置されたマイクロコントローラに命令を出し、かつマイクロコントローラをモニタすることによって、行なってもよい。これらのマイクロコントローラはそれぞれ、個々のサブアセンブリの特定のタスク専用のソフトウェア・プログラムを実行してもよい。他の実施形態においては、単一のプロセッサを用いて、複数のサブアセンブリのタスクを実行してもよい。例示した実施形態においては、VCサブシステム401には、人工呼吸器プロセッサ443が含まれている。人工呼吸器プロセッサ443は、ルーツ・ブロワ・モジュール444、呼気制御モジュール454、ブレンダ・モジュール461、およびトランスデューサ・モジュール470内の個々のプロセッサと通信する(代替的な実施形態においては、モジュール444、454、461および470のうちの2つ以上が、単一のモジュール・プロセッサとして機能してもよい)。
【0029】
ルーツ・ブロワ・モジュール444では、ブロワ・プロセッサ445が、ブロワ速度の制御を、ルーツ・ブロワのインペラに取り付けられたブラッシュレスDCモータ(BLDC453)のソフトウェア転流を通して、行なってもよい。インバータ449を用いて、ブロワ・プロセッサ445からのロジック・レベル転流信号を高出力AC電流に変換して、BLDCモータ453を駆動してもよい。BLDCモータ453内の複数の磁気的センサ(たとえば、アナログ・ホール・センサ452)によって、検知信号がブロワ・プロセッサ445に送信されて、ロータ位置および速度が決定される。ブロワ・プロセッサICの内部または外部に、ADC(アナログ・デジタル・コンバータ)回路を設けてもよい。これは、検知信号たとえばホール・センサ452からの検知信号を、サンプリングし、およびブロワ・プロセッサ445用のデジタル値に変換するためである。
【0030】
ルーツ・ブロワ取入口および出口ポートにおけるマイクロフォン451を用いて、ルーツ・ブロワ装置の音響ノイズをモニタしてもよい。またマイクロフォン信号は、ブロワ・プロセッサ445内で処理される前に、ADC回路によってサンプリングされる。増幅器回路447および448を用いて、マイクロフォンおよびモータ検知信号を、ADC回路の前に、それぞれ増幅およびフィルタリングしてもよい。システム・ノイズ・レベルを減らすために、ブロワ・プロセッサ445が、ブロワ・ノイズを打ち消すための「騒音防止」信号を生成してもよい。騒音防止チャンネル(たとえば、各チャンネルはブロワの取入口および出口ポートにおけるノイズ用)を、電力増幅器446を介して増幅してもよい。電力増幅器446自体は、ブロワ・ダクト構造内に位置する一対のスピーカ450を駆動する。
【0031】
ブロワ・プロセッサ445は、(オン・チップまたはオフ・チップの)データSRAM、プログラム・フラッシュ・メモリ、および校正EEPROMを含んでいてもよい。フラッシュおよびEEPROMメモリは、製造、サービス、およびフィールド・ソフトウェア更新を容易にするために、システム内でプログラマブルであってもよい。ブロワ・プロセッサ445は、高速同期シリアル・ポート(SSIO479)を介して、人工呼吸器制御プロセッサ443と通信してもよい。
【0032】
ブロワ・プロセッサ445は、ブロワ・モジュール444の電子機器を校正するための、およびそのEEPROM内の校正データを記憶するためのメカニズムを、実現してもよい。ブロワ・プロセッサ445は、ブロワ・モジュール444の電子機器の調子をモニタするための、および人工呼吸器プロセッサ443(または別個の試験装置)へのセルフ・テスト・フィードバックを生成するためのさらなる能力を、実現してもよい。
【0033】
呼気制御モジュール454内では、呼気プロセッサ455が、パイロット圧力を生成して、この圧力を呼気バルブ風船ダイアフラムに送る複数のソレノイド・バルブを制御してもよい。ソレノイド・バルブ・ドライバ456は、呼気プロセッサ455が生成するロジック・レベル制御信号を高出力DC電流に変換して、呼気制御バルブ459およびPEEPパイロット・バルブ460を駆動させる。呼気プロセッサ455は、PEEP圧力トランスデューサ458をモニタして、PEEPパイロット・バルブ460のクローズド・ループ制御を可能にする。トランスデューサ458からのアナログ信号を、増幅器457が増幅およびフィルタリングすることを、呼気プロセッサ455に対してADC回路がこの信号をA/D変換およびサンプリングする前に、行なってもよい。
【0034】
ブロワ・プロセッサ445の場合と同様に、呼気プロセッサ455には、(オン・チップまたはオフ・チップの)データSRAM、プログラム・フラッシュ・メモリ、および校正EEPROMが含まれていてもよい。フラッシュおよびEEPROMメモリは、製造、サービスおよびフィールド・ソフトウェア更新を容易にするために、システム内でプログラマブルであってもよい。呼気プロセッサ455は、高速同期シリアル・ポート(SSIO480)を介して、人工呼吸器制御プロセッサ443と通信してもよい。
【0035】
呼気プロセッサ455は、呼気制御モジュール454の電子機器を校正するための、およびそのEEPROM内の校正データを記憶するためのメカニズムを、実現してもよい。呼気プロセッサ455は、呼気制御モジュール444の電子機器の調子をモニタするための、および人工呼吸器プロセッサ443(または別個の試験置)に対するセルフ・テスト・フィードバックを生成するためのさらなる能力を、実現してもよい。
【0036】
ブレンダ・モジュール461内では、ブレンダ・プロセッサ462が、システム内の酸素フローを制御し、付属のネブライザ駆動機能を制御し、およびFIO2センサ・インターフェース469を介して外部センサをモニタする。ソレノイド・バルブ・ドライバ463は、ブレンダ・プロセッサ462が生成するロジック・レベル制御信号を、高出力DC電流に変換して、ブレンダ・バルブ468およびネブライザ・バルブ467を駆動する。ブレンダ・プロセッサ462は、酸素圧力トランスデューサ465をモニタして、ブレンダ・バルブ468のクローズド・ループ制御を可能にする。トランスデューサ465およびインターフェース469からのアナログ信号を、増幅器464および466がそれぞれ増幅およびフィルタリングすることを、ブレンダ・プロセッサ462に対してADC回路がこの信号をA/D変換およびサンプリングする前に、行なってもよい。
【0037】
ブロワおよび呼気プロセッサの場合と同様に、ブレンダ・プロセッサ462には、(オン・チップまたはオフ・チップの)データSRAM、プログラム・フラッシュ・メモリ、および校正EEPROMが含まれていてもよい。フラッシュおよびEEPROMメモリは、製造、サービス、およびフィールド・ソフトウェのア更新を容易にするために、システム内でプログラマブルであってもよい。
【0038】
ブレンダ・プロセッサ462は、高速同期シリアル・ポート(SSIO481)を介して、人工呼吸器制御プロセッサ443と通信してもよい。ブレンダ・プロセッサ462は、ブレンダ・モジュール461の電子機器を校正するための、およびそのEEPROM内の校正データを記憶するためのメカニズムを、実現してもよい。ブレンダ・プロセッサ462はさらに、ブレンダ・モジュール461の電子機器の調子をモニタするための、および人工呼吸器プロセッサ443(または別個の試験装置)へのセルフ・テスト・フィードバックを生成するためのさらなる能力を、実現してもよい。
【0039】
トランスデューサ・モジュール470内では、圧力プロセッサ471が、臨界のシステム圧力を測定し、および周期的なオート・ゼロおよび検知ライン・パージ機能を管理する。ソレノイド・バルブ・ドライバ472は、圧力プロセッサ471が生成するロジック・レベル制御信号を、高出力DC電流にト変換して、オートゼロ・バルブ473およびパージ・バルブ474を駆動する。圧力プロセッサ471は、フロー・センサ圧力トランスデューサ477と、気道およびブロワ圧力トランスデューサ478とをモニタする。
【0040】
増幅器476は、トランスデューサ477および478の検知信号出力を増幅およびフィルタリングすることを、圧力プロセッサ471がこれらの検知信号をサンプリングおよび処理する前に、行なう。一実施形態においては、2つの並列増幅器を、フロー・センサ圧力トランスデューサ477に専用にしてもよい。一方の増幅器が、高利得、狭レンジの、オフセット補償されたフロー・トリガ・チャンネルをもたらしてもよい。オフセット補償は、ソフトウェア制御されたDAC(デジタル・アナログ・コンバータ)回路475を用いて実現される。第2のチャンネルが、患者から出入りする流れの全双方向ダイナミック・レンジをカバーする低利得の増幅器をもたらしてもよい。また増幅器476によって、増幅された気道ゲージ圧力およびブロワ差圧信号が得られる。
【0041】
他のモジュール・プロセッサの場合と同様に、圧力プロセッサ471には、(オン・チップまたはオフ・チップの)データSRAM、プログラム・フラッシュ・メモリ、および校正EEPROMが含まれていてもよい。フラッシュおよびEEPROMメモリは、製造、サービス、およびフィールド・ソフトウェア更新を容易にするために、システム内でプログラマブルであってもよい。圧力プロセッサ471は、高速同期シリアル・ポート(SSIO482)を介して、人工呼吸器制御プロセッサ443と通信してもよい。
【0042】
圧力プロセッサ471は、トランスデューサ・モジュール470の電子機器を校正するための、およびそのEEPROM内の校正データを記憶するためのメカニズムを、実現してもよい。圧力プロセッサ471はさらに、トランスデューサ・モジュール470の電子機器の調子をモニタするための、および人工呼吸器プロセッサ443(または別個の試験装置)へのセルフ・テスト・フィードバックを生成するためのさらなる能力を、実現してもよい。
【0043】
2.ユーザ・インターフェース・サブシステム
ユーザ・インターフェース(UI)サブシステム400には、装置ユーザおよび外部周辺機器に対するインターフェースを形成する電子機器が含まれている。1つまたは複数の実施形態においては、UIサブシステム400は、ユーザに、患者状態、装置状態、アラーム条件、および制御設定に関する音響および視覚のフィードバックなどの情報を与えてもよい。UIサブシステム400は、ユーザ入力(たとえば、ノブおよびボタン)をモニタして、設定を、人工呼吸器コア・サブシステム401の人工呼吸器プロセッサ443に、シリアル・チャンネル(たとえば、UART438)を介して伝達する。また1つまたは複数の実施形態においては、UIサブシステム400は、電源サブシステム402をモニタおよび制御し、装置構成および制御設定を不揮発性メモリ内に維持し、イベントおよびユーザ動作のレコーダとしての機能を果たし、および任意のアクセサリ装置(たとえば、ドッキング・クレードル200、内部パルス・オキシメータ307など)と通信する。
【0044】
UIサブシステム400内では、ユーザ・インターフェース・プロセッサ403が、全般的なユーザ・インターフェース機能性を制御するソフトウェア・プログラムを実行する。ユーザ・インターフェース・プロセッサ403に関連するプログラム・フラッシュ・メモリは、製造、サービス、およびフィールド・ソフトウェア更新を容易にするために、システム内でプログラマブルであってもよい。1つまたは複数の実施形態においては、ある特定のタスク、たとえば表示をリフレッシュすることおよびキーを走査することは、ユーザ・インターフェース・サブアセンブリ内に位置するプログラマブル・マイクロコントローラおよび/または専用のハードウェア・コントローラに任せてもよい。以下、可能なUIサブアセンブリの機能性について説明する。
【0045】
人工呼吸器ユーザ・インターフェースは、種々の表示および入力/出力メカニズムによって実施してもよい。たとえば1つのユーザ・インターフェース実施形態(ハイ・エンド・ユーザ・インターフェース404として標示される)では、カラーLCD(液晶表示:たとえば、TFTまたはVGA)グラフィックス・パネル429およびアナログ・タッチ・スクリーン・オーバーレイ431を利用して、フレキシブル・ユーザ・インターフェースに高い情報内容を提供する。インターフェース404は、UIプロセッサ403にバス435を介して接続される。LCDコントローラ432は、高速LVDS(低電圧差動シグナリング)インターフェース428を介して、RAM画像バッファ(オン・チップまたはオフ・チップ)からLCD429をリフレッシュする時間のかかるタスクを行なってもよい。UIソフトウェアは、画像バッファの更新を、表示内容が実際に変化する時間に制限してもよい。
【0046】
LCDバックライトには、バックライト・インバータ430から電力が供給される。スクリーンの明るさは、バックライトDAC433を用いて、UIソフトウェアによって制御してもよい。タッチ・スクリーンADC/コントローラ434は、タッチ・スクリーン・オーバーレイ431の走査を行ない、またタッチ動作の時間の間にUIソフトウェアに割り込みおよびデータをもたらす。
【0047】
他のユーザ・インターフェース実施形態では、代替的にまたは追加的に、ロー・エンド・ユーザ・インターフェース408を用いてもよい。ロー・エンド・ユーザ・インターフェース408には、たとえば、ドット・マトリックスの組み合わせ、7セグメントおよび/または別個のLED(LEDマトリックス414として表わされる)、ならびにメンブレン・キー・マトリックス415が含まれる。LEDマトリックス414は、LED電源ドライバ416およびLEDシンク・ドライバ417によって駆動される。IO(入力/出力)プロセッサ410は、RAM画像バッファからLEDマトリックス414をリフレッシュするタスクを行なってもよい。UIソフトウェアは、画像バッファの更新を、その内容が変化したときに行なってもよい。またIOプロセッサ410は、タスクキー・マトリックス415を走査するタスク、およびキー動作の時間の間にUIソフトウェアに割り込みおよびデータをもたらすタスクを行なう。
【0048】
ユーザ・インターフェース・オプション(ハイ・エンド・インターフェース404およびロー・エンド・インターフェース408)の両方が、共通のインターフェース409を用いてもよい。共通のインターフェース409には、ノブ(たとえば、ロータリ・スイッチ)418、専用機能に対する1つまたは複数のハード・キー419、状態LED420、および音響のソフトウェア・アラーム・スピーカ421が、含まれる。IOプロセッサ410は、ノブ418およびハード・キー419を追跡して、ノブおよび/またはハード・キー動作の時間の間にUIソフトウェアに割り込みおよびデータをもたらしてもよい。またIOプロセッサ410は、ソフトウェア・アラームを合成して、UIソフトウェアからのコマンドに基づいて状態LED420を制御してもよい。
【0049】
付属の内部パルス・オキシメータ・モジュール426(その外部センサが患者の指に配置されている)は、モニタ・データたとえば脈拍数および酸素飽和レベルを、ユーザ・インターフェース・プロセッサ403に与える。ユーザ・インターフェース・プロセッサは、シリアル・インターフェースたとえばUART437を介して、モジュール426と通信する。
【0050】
クレードル・インターフェース423には、コネクタ424(ドッキング・クレードル上の連結装置コネクタと電気的に結合するため)と、送受信器(たとえば、ISO XCVR425)とが含まれており、人工呼吸器とドッキング・クレードル電子機器との間での中程度のデータ速度での通信(たとえば、シリアルUARTインターフェース438を介して)が可能になっている。また、DC電源を、このインターフェースを通して(コネクタ424から電源モジュール483までのクレードル電源ライン441を参照のこと)、ドッキング・クレードルから人工呼吸器まで伝達してもよい。また、人工呼吸器は、外部に、クレードル・インターフェース423を通して、リモート・アラーム/ナース・コール信号を送ってもよい。
【0051】
不揮発性メモリ回路(たとえば、NANDフラッシュ427)が、人工呼吸器イベントおよび制御設定変化を長期間記録するために、UIサブシステム400内に含まれていてもよい(「ブラック・ボックス」レコーダのように)。ユーザ・インターフェース・プロセッサ403は、たとえば、パラレル・バス(436)を介して、不揮発性メモリ427に直接書き込んでもよい。
【0052】
また、IOプロセッサ410は、電源サブシステム402に対する管理部としての機能を果たしてもよい。たとえば、IOプロセッサ410は、すべての電源入力および電源出力をモニタし、アクティブな入力電源の選択(電源スイッチ・マトリックス489を介した)を管理し、2つの内部バッテリ充電器(485および487)を制御してもよい。さらに、IOプロセッサ410は、「オン/オフ」および「アラーム無音/リセット」のハード・キーの状態をモニタして、共通インターフェース409上の「オン/オフ」、「ベント インオプ(VENT INOP)」、「アラーム無音」、「外部電源」、「バッテリ状態」、「充電状態」LEDを駆動してもよい。
【0053】
IOプロセッサ410は、装置監視部としての機能を果たしてもよい。たとえば一実施形態においては、各サブアセンブリは、IOプロセッサ410に、調子が良好であることを周期的に報告しなければならない。同様に、IOプロセッサ410は、アラーム・システム407のアラーム・ドライバ412に、調子が良好であることを周期的に報告しなければならない。アラーム・ドライバ412が、調子が良好であることの更新を受け取らない場合には、音響のハードウェア・アラーム(INOP)413およびリモート・アラーム/ナース・コール出力(411)が、始動される。また、アラーム・ドライバ412は、救命機能の再始動を試みるために、装置リセットをトリガしてもよい。
【0054】
3.電源サブシステム
人工呼吸器への電源供給は、外部DC電源(たとえば、外部電源492またはクレードル・インターフェース423)からコネクタ490を介してか、または内部電源(たとえば、リムーバブル・バッテリ491またはブリッジ・バッテリ486)から、行なってもよい。ブリッジ・バッテリ486のサイズは、人工呼吸器のシームレスな動作が実現され、一方でリムーバブル・バッテリ491がコネクタ488から交換されるような大きさである。2つの独立した内部充電器(485および487)が、リムーバブル・バッテリ491およびブリッジ・バッテリ486に対する充電を維持する目的で、含まれていてもよい。電源484には、人工呼吸器システム全体を通して用いられるDC電圧を提供するために、複数のスイッチングおよび/または線形電源が含まれていてもよい。
【0055】
E.ドッキング・クレードル電子アーキテクチャ
図5は、ドッキング・クレードル200の一実施形態に対する電気的なアーキテクチャのブロック図である。図示したように、ドッキング・クレードルは、基本モジュール500とフル機能モジュール501とに分割されている。基本モジュール500によって、基本的な電源および状態インディケータとともに、アラーム・ケーブル出力が得られる。フル機能モジュール501によって、さらなる処理能力とともに、さらなる接続インターフェース、モニタリング能力、および追加の表示モニタに対するサポートが実現される。特徴の区分は、ドッキング・クレードル内で実施される(実施される必要はないが)能力の範囲を強調するように、示されている。例示した特徴は、網羅的であることが意図されているわけではなく、また必要な特徴を表わしているわけでもない。ドッキング・クレードルの異なる実施形態には、本発明の範囲から逸脱することなく、特徴の異なる組み合わせ、および異なる数の特徴が含まれていてもよい。
【0056】
例示した実施形態においては、基本モジュール500には、クレードル・インターフェース・コネクタ503が含まれている。クレードル・インターフェース・コネクタ503は、人工呼吸器のクレードル・インターフェース・コネクタ424と電気的に接続するものである。人工呼吸器には、DC電源が、AC/DCアダプタ507を介して供給される。AC/DCアダプタ507は、AC電源を、外部電源から(たとえば、壁出口に取り付けられるケーブルから)受け取ってもよい。また、AC/DCアダプタ507は、DC電源をフル機能モジュール501に、電源モニタおよびコントローラ・ブロック506を介して供給してもよい。人工呼吸器からのリモート・アラーム/ナース・コール出力(図4のブロック411を参照)は、リモート・アラーム/ナース・コール・インターフェース508を通して、外部アラーム・ケーブルの取り付けができるように(たとえば、病室内の壁ジャックまたは装置へのプラグ差込みのために)、生成される。フル機能モジュール501がある場合には、送受信器(XCVR)回路504を実装して、クレードル・インターフェース・コネクタ503を介した人工呼吸器との通信を容易にしてもよい。送受信器回路504は、シリアル・インターフェース、たとえばUARTインターフェース526を介して、クレードル・プロセッサ509と通信してもよい。基本モジュール500内のハードウェア駆動の状態LED505によって、基本的な装置状態、たとえばアクティブな存在、および/またはAC/DCアダプタ507の調子、および人工呼吸器との接続の調子が、得られてもよい。
【0057】
フル機能モジュール501を実施して、ドッキング・クレードルのインターフェース能力をさらに拡張して、たとえば、以下のオプションを含むようにしてもよい。追加の表示モニタ(502)に対するサポート、メモリ・カード・スロット514内に1つまたは複数のメモリ・カード575(たとえば、コンパクトなフラッシュ・メモリ・カード)を追加することによるメモリ拡張、追加の患者モニタリング・インターフェース516、内部ETC02モニタ518(外部ETC02センサ579に接続される)、およびモデム520(たとえば、電話機を介したリモート・アクセス用)。
【0058】
クレードル・プロセッサ509が実行するソフトウェア・プログラムによって、フル機能モジュール501の付属の特徴が制御される。クレードル・プロセッサ509には、(オン・チップまたはオフ・チップの)データSRAMメモリ、プログラム・フラッシュ・メモリ、およびバッテリ・バックアップ付きSRAMが含まれていてもよい。フラッシュ・メモリは、製造、サービス、およびフィールド・ソフトウェア更新を容易にするために、ISP/デバッグ・インターフェース(サービス・ポート)517を介して、システム内でプログラマブルであってもよい。
【0059】
フル機能モジュール501では、フル機能モジュール回路が必要とするすべての供給電圧を生成するDC−DC変換を行なうために、電源521を設けてもよい。モジュール電子機器のオン/オフ状態および調子を示すために、ソフトウェア駆動状態LED522が含まれていてもよい。
【0060】
追加の表示モニタ502に対するサポートを実現するために、フル機能モジュール501にモニタ・コントローラ510を備え付けてもよい。モニタ・コントローラ510には、LCDコントローラ511(モニタはLCDモニタであると仮定する)、バックライトDAC512、およびタッチ・スクリーンADC513が含まれている。LCDコントローラ511からは、データおよび制御信号が、LCD−パネル523に、それぞれLCDバス528および制御(CTL)バス529を介して供給される。バックライトDACは、バックライト・インバータ回路524を駆動する。タッチ・スクリーンADC513は、タッチ・スクリーン・パネル525を制御するとともに、TSバス530を介してタッチ・スクリーン・データを受信する。他の実施形態においては、追加のまたは異なる特徴を、フル機能モジュール501内で具体化してもよい。
【0061】
F.人工呼吸器システムに対する一般的なソフトウェア・アーキテクチャ
1つまたは複数の実施形態においては、人工呼吸器およびドッキング・クレードルには、個々のハードウェアを制御し、システムの動作特性を決定する埋め込みソフトウェア(および/またはファームウェア)が含まれている。このソフトウェアは、システム全体を通して種々のサブアセンブリ上に分配される複数のプロセッサ間で、分割してもよい。図6は、本発明の1つまたは複数の実施形態による人工呼吸器システムの一般的なソフトウェア・アーキテクチャのコンテキストを例示するブロック図である。
【0062】
図6では、人工呼吸器システムに対するソフトウェアは、以下のプロセッサ内に分配されている。すなわち、ユーザ・インターフェース・プロセッサ403、IOプロセッサ410、換気プロセッサ443、ブレンダ・プロセッサ462、呼気プロセッサ455、圧力プロセッサ471、ブロワ・プロセッサ445、およびクレードル・プロセッサ509である。以下、これらの個々のプロセッサが実行するソフトウェアの種々の機能について説明する。説明する機能は、例示だけを目的として示しており、網羅的な表現であるとも、すべての実施形態に対して必要な機能であるとも、考えてはならない。説明を容易にするために、各プロセッサ上で実行されるソフトウェアは、プロセッサの名前を参照して呼ぶことにする(すなわち、ユーザ・インターフェース・プロセッサ上で実行されるソフトウェアは、ユーザ・インターフェース・ソフトウェアと呼び、ブレンダ・プロセッサ上で実行されるソフトウェアは、ブレンダ・ソフトウェアと呼ぶ、など)。
【0063】
ユーザ・インターフェース・ソフトウェア(ユーザ・インターフェース・プロセッサ403上で実行される)は、IOプロセッサ410およびクレードル・プロセッサ509と通信するとともに、換気制御データ(たとえば、設定およびアラーム限界)を換気プロセッサ443に送るように構成されてもよい。ユーザ・インターフェース・ソフトウェアは、クレードル・プロセッサ509から受け取ったアプリケーション・コードを、フラッシュ・メモリ427内に記憶してもよく、またアプリケーション・コードIOの更新を、プロセッサ410、換気プロセッサ443、ブレンダ・プロセッサ462、呼気プロセッサ455、圧力プロセッサ471およびブロワ・プロセッサ445に対して、行なってもよい。またユーザ・インターフェース・ソフトウェアは、傾向データ、ベント設定、およびユーザ構成データを、不揮発性RAM(NVR)601に記憶してもよく、また、すべてのイベント、たとえば制御変化、アラーム、および故障を、フラッシュ・メモリ427の「ブラック・ボックス」部分に記録してもよい。ユーザ・インターフェース・ソフトウェアは、LCDユーザ・インターフェース(LCD429、タッチ・パネル431、およびバックライト433)を駆動して、たとえば、換気プロセッサ443から受け取るアラーム・データおよび/またはモニタされたデータを表示する。
【0064】
IOソフトウェア(IOプロセッサ410上で実行される)は、ユーザ・インターフェース・プロセッサ403と通信して、取り付けられた周辺機器回路および装置に対するインテリジェント・コントローラを実現するように構成されてもよい。たとえばIOソフトウェアは、状態LED420、共通のボタン(またはキー)419、ノブ418、およびスピーカ421に対する低レベル・ドライバを実現してもよい。加えて、IOソフトウェアは、LEDマトリックス414をリフレッシュし、キー・マトリックス415を走査し、および電源スイッチ・マトリックス489およびバッテリ充電器603(485、487)を制御するように構成されてもよい。
【0065】
換気ソフトウェア(換気プロセッサ443上で実行される)は、主な機能、たとえば呼吸の生成、圧力サーボの実施、および操作(たとえば、ネブライザ活性化、I−ホールド(吸入ホールド)、E−ホールド(呼気ホールド)など)の順序づけを制御するように構成されてもよい。また換気ソフトウェアは、モニタされたパラメータを算出し、モニタされた値をアラーム限界と比較し、および圧力プロセッサ471に対するオート・ゼロ機能をスケジュールするように構成されてもよい。
【0066】
ブレンダ・ソフトウェア(ブレンダ・プロセッサ462上で実行される)は、ネブライザ・バルブ467を制御し、およびブレンディング・サーボを実施してブレンド・バルブ468を制御するように構成されてもよい。またブレンダ・ソフトウェアは、O2トランスデューサ465をモニタおよび校正し、センサ469の校正を管理し、およびFiO2データを換気プロセッサ443に転送してもよい。
【0067】
呼気ソフトウェア(呼気プロセッサ455上で実行される)は、パイロット圧力トランスデューサ458からの入力に基づいて、PEEPイン・バルブ604およびPEEPアウト・バルブ605の制御を行なうためのPEEPサーボを実施するように構成されてもよい。また呼気ソフトウェアは、呼気バルブ459を制御し、およびパイロット圧力トランスデューサおよびPEEPサーボの校正を管理してもよい。
【0068】
圧力ソフトウェア(圧力プロセッサ471上で実行される)は、フロー・トランスデューサ477からの校正されたトリガ圧力読み取り値およびフロー・センサ圧力読み取り値、ブロワ・トランスデューサ607からの校正されたブロワ差圧読み取り値、および気道トランスデューサ606からの校正された気道圧力読み取り値を、換気プロセッサ443に供給するように構成されてもよい。また圧力ソフトウェアは、オート・ゼロ・バルブ473およびパージ・バルブ474を用いて、オート・ゼロおよびパージ機能を実施してもよい。
【0069】
ブロワ・ソフトウェア(ブロワ・プロセッサ445上で実行される)は、速度サーボを実施し、ブロワ・モータ453を転流するように構成されてもよい。速度サーボの実施、およびモータ453の転流を容易にするために、ブロワ・ソフトウェアは、モータ位置センサ(たとえば、ホール・センサ452)を校正し、モータ位置センサ452の出力からロータ位置および速度を算出してもよい。また、ブロワ・ソフトウェアは、モータ453のアクティブなブレーキングと、アクティブな音キャンセリングとを実施してもよい(たとえば、マイクロフォン451からの入力を使用し、スピーカ450を介して騒音防止出力を生成することによって)。
【0070】
クレードル・ソフトウェア(クレードル・プロセッサ509上で実行される)は、ユーザ・インターフェース・プロセッサ403と通信し、換気データ(たとえば、波、ループ、データ、概要、および傾向)をLCDディスプレイ523に表示するよう構成されてもよい。また、クレードル・ソフトウェアは、傾向データを記憶してメモリ・カード575上に画像を印刷するように構成されてもよい。クレードル・ソフトウェアは、ETC02モニタ518からETC02データを集めて、そのデータを、ユーザ・インターフェース・プロセッサ403を介して人工呼吸器に送信してもよい。さらに、患者データおよびアラームを、他の患者モニタ・システムに転送してもよい(たとえば、ポート516を介して)。
【0071】
II.一実施形態における人工呼吸器の空圧系
本発明の1つまたは複数の実施形態において、人工呼吸器の空圧系は、複数の電気機械サブアセンブリを備える。換気機能性は、これらの電気機械サブアセンブリの空圧系機能をコンピュータ制御することによって、実現される。図7は、人工呼吸器の一実施形態の空圧系図である。
【0072】
図7のシステムでは、屋内空気が、入口フィルタ700を通して取り入れられる。その後、空気は、組み合わせアキュームレータ/サイレンサ・チャンバ701を通って移動する。組み合わせアキュームレータ/サイレンサ・チャンバ701では、空気を酸素と混合してもよい。またチャンバ701は、ルーツ・ブロワ702の入口側で生成されるノイズを吸収する働きもする。ルーツ・ブロワ702(たとえばブラッシュレスDCモータによって駆動される)は、ロータリ容積式装置であり、この装置では、ガス混合物にエネルギーを加えて、患者にガスを所望のフローおよび圧力で供給する。
【0073】
一実施形態においては、ルーツ・ブロワ702は、速度、フロー、差圧、および関連するフロー・データにより特徴付けられてもよい。これらは、電子メモリに記憶されて、人工呼吸器プロセッサ443がブロワを交互に加速および減速して、吸気を引き起こし呼気を可能にする際に使用される。アナログ位置センサ(たとえば、ホール・センサ)が、モータ内のロータ位置を測定し、このロータ位置から、ブロワ・プロセッサ445が、ルーツ・ブロワ702の回転速度を算出してもよい。差圧トランスデューサ703によって、ブロワ内の圧力が測定される。人工呼吸器プロセッサ443(ブロワ・プロセッサ445とともに動作する)は、吸気相の全体を通してブロワ速度を調整して、所望のフロー、体積、および圧力を実現してもよい。ソレノイド・バルブ704および705によって、差圧トランスデューサ703に対するオート・ゼロ能力が得られる。
【0074】
ルーツ・ブロワ702のガス出口側のサイレンサ・チャンバ706によって、ブロワ・ノイズが低減される。そして、ガスが、バイアス・バルブ707(たとえば5cmH2Oまたは概ね5cmH2Oに設定される)を通って移動する。
【0075】
患者フロー・トランスデューサ708、即ち固定オリフィス差圧型トランスデューサによって、患者との間のフローが測定される。過圧リリーフ・バルブ709および準大気圧リリーフ・バルブ710が内部にあり、これらによって、重大な人工呼吸器動作不良が起きた場合の患者の安全性を保証するためのフェイル・セーフ機構が実現されている。MIP/NIFロックアウト・コイル711が、準大気圧リリーフ・バルブ710に含まれており、最大吸気圧(MIP)手順の間にバルブが開口することが防止される。
【0076】
圧力トランスデューサ・モジュール712によって、システムの基本的な圧力測定能力が実現される。たとえば、3つの圧電抵抗式圧力トランスデューサによって、フロー・センサ差圧トランスデューサ713が形成されて、患者フロー・トランスデューサ708と気道ゲージ圧力トランスデューサ714との差圧を測定して、患者気道内の圧力を評価する。ソレノイド・バルブ715および716によって、フロー・センサ差圧トランスデューサ713に対するオート・ゼロ能力が実現される。一方で、バルブ717および718は、ブロワ出口からの乾燥ガスを、患者フロー・トランスデューサ検知ラインを通して、パージ・サイクルの一部として、周期的に送る。
【0077】
呼気制御モジュール719によって、患者は、所望のPEEPに基づいて呼気することができる。吸気する間、呼気制御ソレノイド720は、ブロワ出口からのガス圧力を、呼気バルブ721の風船ダイアフラムに供給して、呼気バルブが閉じる。呼気する間、パイロット圧力アキュームレータ722から風船にパイロット圧力が供給されて、PEEPレベルが確立される。アキュームレータ722におけるパイロット圧力は、パイロット・イン・ソレノイド・バルブ723およびパイロット・アウト・ソレノイド・バルブ724のパルス幅変調(PWM)を通して、パイロット圧力トランスデューサ725からのフィードバックを用いて、制御される。
【0078】
酸素ブレンディングおよびネブライザ・ドライブは、ブレンダ・モジュール726において制御される。加圧ガスは、外部供給源726から受け入れられ、フィルタリングされて、チャンバ701内に供給される。これは、関連するオリフィスを有するソレノイド・バルブ727、728、729、および730のPWM制御の下で行なわれる。各ソレノイド・バルブのオリフィスの特徴づけは、初期アセンブリの間に行なってもよく、また関連するフロー・データは、モジュール726内のPCB上の電子メモリに記憶してもよい。O2圧力トランスデューサ731によって、バルブ入口圧力が測定される。入口圧力、記憶されたオリフィス特徴付け、およびPWMを用いて、ブレンダ・コントローラは、所望の酸素フロー範囲を送出することができる。ネブライザはソレノイド・バルブ732を駆動し、その関連するオリフィスは、エアロゾル化された薬剤などの内容を、吸気相の間にバルブ727〜730の駆動ポートに送る。内容量は、たとえば、6lpmまたは概ね6lpmの酸素フローであってもよい。付加されたネブライザ・フローを補償するために、システム・ソフトウェアが酸素の送出および体積を調整してもよい。
【0079】
前述したように、可変速度ルーツ・ブロワ702は、人工呼吸器プロセッサ443によって、必要に応じて、交互に加速および減速されて、吸気および呼気を引き起こす。代替的な実施形態においては、ルーツ・ブロワ702は、人工呼吸器プロセッサ443によって比較的一定の速度に維持される。その結果、比較的一定のガス・フローが、患者の肺の換気に好適な流量および圧力で生成される。患者へのガス・フロー、吸気を引き起こす開口、および呼気を可能にする閉鎖を制御するために、下流フロー制御バルブが利用される。この代替的な実施形態においては、各ルーツ・ブロワ702の一意の圧力およびフロー出力を、製造中に測定する必要はなく、また人工呼吸器プロセッサ443による使用に備えて、個別化されたブロワ特徴付けデータを記憶する必要はまったくない。
【0080】
III.呼気制御サーボの実施形態
本発明の1つまたは複数の実施形態においては、所望のPEEP圧力値から実際のPEEP圧力を生成するために、呼気制御サーボを実施する。所望のPEEP圧力値は、PEEP圧力を表わすデジタル値である。実際のPEEP圧力は、ルーツ・ブロワ702のブロワ圧力から生成される、制御された単位面積当たりの力である。呼気サーボは、デジタル・ドメインから空圧系ドメインへのこの変換を実現するための電気機械装置を備えている。
【0081】
図8は、本発明の実施形態による呼気サーボ・ループを示すブロック図である。図8の呼気制御サーボには、ソフトウェア制御ブロック800、機械アセンブリ801、および電気的アセンブリ802が含まれている。動作中、ソフトウェア制御ブロック800は、デジタルの所望のPEEP値804(たとえば、人工呼吸器プロセッサ443から)と、現在の未処理のパイロット圧力808のデジタル値とを受け取り、そしてサーボ・ループの出力圧力を増加させるための充填コマンド805と、出力圧力を低減するための放出コマンド806とを生成する。コマンド805および806は、電気的な形式(たとえば、デジタル)である。
【0082】
機械アセンブリ801は、ソフトウェア制御800からの充填および放出コマンド(805、806)とともに、物理的なブロワ圧力803を、空圧系の形式で受け取る。機械アセンブリ801は、充填および放出コマンドに基づいてブロワ圧力803を印加して、パイロット圧力フィードバック値807と実際のPEEP値809とを、両方とも空圧系の形式で生成する。電子アセンブリ802は、パイロット圧力807を未処理のパイロット圧力信号808に変換する。パイロット圧力信号808は、ソフトウェア制御800による処理に備えてデジタル形式である。
【0083】
図9Aは、本発明の実施形態による機械アセンブリ801のブロック図である。機械アセンブリ801では、充填コマンド805が充填バルブ723に供給されて、パイロット・チャンバ722内に解放されるブロワ圧力803の量が制御される。パイロット・チャンバ722からの圧力の解放を制御するために、放出コマンド806が放出バルブ724に供給される。一実施形態においては、充填コマンド805および放出コマンド806は、PWM信号として実施される。パイロット・チャンバ722によって、バルブ723および724を開口および閉鎖する圧力効果が蓄積される。蓄積圧力は、パイロット圧力807として出力される。チャンバ900によって、呼気制御バルブの風船ダイアフラムが具体化されてもよく、その結果、実際のPEEP圧力809が活性化される。
【0084】
図9Bは、電子アセンブリ802の実施形態のブロック図である。パイロット圧力807は、圧力トランスデューサ714によって、パイロット圧力検知信号901に変換される。前置増幅器902によって、パイロット圧力検知信号901が増幅され、ロー・パス・フィルタ903によって、増幅信号内のわずかなノイズおよび上部高調波も取り除かれる。増幅およびフィルタリングされた検知信号は次に、サンプルおよびホールド回路904によってサンプリングされ、その後に、ADCブロック905において、デジタルの未処理のパイロット圧力値808に変換される。
【0085】
図9Cは、ソフトウェア制御ブロック800の実施形態のブロック図である。ブロック906では、所望のPEEP値804が、所望のパイロット圧力値907を生成するための関数に適用される。ブロック906において実施される関数は、与えられたPEEP値に対するパイロット圧力の既知の(すなわち、校正された)値に基づく単純なテーブル索引であってもよい。あるいは、その関数は、チャンバ900に入力されるパイロット圧力と結果的に生じるPEEP値との間の関係の逆に近い数学的なモデルであってもよい。
【0086】
デジタル・ロー・パス・フィルタ908は、未処理のパイロット圧力信号808と、所望のサーボ・ループ応答を維持するために信号を送るバンドリミットとを受け取る。ブロック909では、ブロック714内のトランスデューサの特性の逆に近い数学的関数を実施する。トランスデューサの作用によるパイロット圧力値のわずかな変動も、ブロック909によって補正される。
【0087】
ブロック909に対する数学的なモデルは、製造中にトランスデューサを校正すること、および未処理のおよび実際のパイロット圧力値を記憶することによって、形成してもよい。そして、トランスデューサの効果をほぼ逆にするように、数学的な方程式を構築してもよい。これは、最小2乗法の曲線フィッティングまたは同様の技術を校正データに適用することを通して、方程式に対する係数を決定することによって、行なわれる。
【0088】
ブロック911では、所望のパイロット圧力907および実際のパイロット圧力910を比較して誤差値を決定した後、その誤差値を、アルゴリズム(たとえば、PIまたはPIDアルゴリズム)の制御に適用して、充填コマンド805および放出コマンド806を生成する。一実施形態においては、充填および放出コマンドのバイナリ状態は、周期的な間隔で決定される。測定されたパイロット圧力が、所望のパイロット圧力を閾値量だけ超える場合には、放出コマンドをその間隔の間活性化するが、測定されたパイロット圧力が、所望のパイロット圧力を、閾値量を超えて下回る場合には、充填コマンドをその間隔の間活性化する。測定されたパイロット圧力が、所望のパイロット圧の閾値範囲内にある場合には、どちらのコマンドも活性化しない(そのままの状態を電流間隔の間、維持する)。
【0089】
IV.ルーツ・ブロワ・アセンブリの実施形態
本発明には、機械的人工呼吸器内のコンプレッサを駆動するために用いてもよい電動モータの精密速度制御が含まれる。機械的人工呼吸器は、種々の動作モード、たとえば圧力制御および体積制御を有していてもよい。ほとんどの機械的人工呼吸器の間で共通する1つのスレッドは、所望の動作モードは、ガス・コンプレッサが生成するガス流量を制御することによって達成される、ということである。ブロワ・アセンブリに対する好適なコンプレッサ制御システムの例が、以下の文献でさらに説明されている。米国特許出願第10/847、693号明細書(2004年5月18日出願)。なお、この文献の明細書および図は本明細書において参照により取り入れられている。
【0090】
一実施形態においては、コンプレッサ・モータは、ブラッシュレスDC(BLDC)モータであって、このモータによって、携帯型機械的人工呼吸器内でコンプレッサとして用いられるルーツ・ブロワが駆動される。コンプレッサがもたらす流量および圧力は、BLDCモータの速度によって制御される。従来技術のシステムでは、デジタル・ホール効果センサを用いてロータ位置の別個のサンプルを取得し、別個の速度トランスデューサを用いて、BLDCモータの速度フィードバックを取得しているが、この従来技術とは異なり、本発明の実施形態では、アナログ・センサ(たとえば、アナログ・ホール効果センサ、異方性磁気抵抗(AMR)センサなど)を用いて、連続的なロータ位置およびクローズド・ループ制御に対する速度フィードバックを取得してもよい。
【0091】
図10は、本発明の実施形態によるモータ/コンプレッサ・システムのブロック図である。この説明図では、モータ/コンプレッサ・システムは、BLDCモータ1004に結合されたルーツ・ブロワ1002を備えている。ルーツ・ブロワ1002にはガス(すなわち、空気)が、入口1008を通って入る。入口1008からの空気は、ルーツ・ブロワ1002によって圧縮された後、患者および/または機械的人工呼吸器の他のセクションへ、出口1010を通して送られる。流体伝達経路は、ルーツ・ブロワ1002のソレノイド・バルブ1012への入力と、ルーツ・ブロワ1002のソレノイド・バルブ1014への出力とによって与えられる。また大気圧力が、ソレノイド・バルブ1012および1014に、大気入口1016および1018を介して、それぞれ送られる。
【0092】
ソレノイド・バルブ1012および1014の出力流体伝達チャンネルが、ブロワ差圧トランスデューサ1040に与えられ、2つのチャンネル間の圧力差を変換して、その圧力差を表わす電気信号にする。通常動作時は、トランスデューサ1040によって、ルーツ・ブロワ1002の出力圧力と入力圧力との間の差が測定される。ソレノイド・バルブ1012および1014を制御することによって、トランスデューサ1040は、トランスデューサ1040の「オート・ゼロ」位相の間に、2つの大気入口の間の圧力差を測定することもできる。プロセッサ1020によって、ソレノイド・バルブ1012および1014の制御が実現される。その際、ソレノイド・ドライバ1032が、プロセッサ1020からのデジタル制御信号を変換して、ソレノイド・バルブを駆動できる電源DC信号にする。
【0093】
絶対圧トランスデューサ1022および温度トランスデューサ1024によって、絶対圧レベルおよび温度を表わす電気信号が生成される。トランスデューサ1022、1024、および1040はそれぞれ、トランスデューサ(XDCR)インターフェース・ブロック1026に接続されている。トランスデューサ(XDCR)インターフェース・ブロック1026は、アナログ信号の信号増幅およびフィルタリングを行なってもよく、アナログ信号はその後、A/D(アナログ・デジタル)コンバータ回路1038に送られる。A/Dコンバータ1038によって、アナログ信号がデジタル値に変換される。デジタル値は、プロセッサ1020によって処理されてもよい。
【0094】
A/Dコンバータ回路1038に加えて、プロセッサ1020は、以下の関連回路も有する。すなわち、フラッシュ・メモリ1048、JTAG試験回路1046、ランダム・アクセス・メモリ(RAM)1044、およびUART(汎用非同期受信送信器)1042および1036である。外部JTAGコネクタ1050が、JTAG回路1046に接続されて、JTAG規格に基づくハードウェア試験およびデバッギングを容易にしている。遠隔測定コネクタ1052が、UART1042に接続されている。これは、測定された人工呼吸器パラメータを、リモート・システムに、たとえばモニタリング目的で送信するためである。通信および電源コネクタ1054が、UART1036に接続されている。これは、人工呼吸器システムとのさらなる外部通信を、たとえば動作上の試験および制御のために行なうことを容易にするためである。またコネクタ1054によって、任意の必要な電源信号が、モータ/コンプレッサ・システム(たとえば、3.3、5.0、および/または15VDC(ボルトDC))に送られる。
【0095】
アナログ・センサ1006(たとえば、アナログ・ホール効果センサ)が、円形パターンのPCボード上に配置されている。このPCボードは、BLDCモータ1004のロータ・シャフトに垂直で、およびロータ・シャフトの端部に取り付けられた二極磁石に隣接するものである。アナログ・センサ1006から、BLDCロータ位置の算出に必要な測定値が得られる。センサ1006のアナログ出力は、センサ・インターフェース1028を通して送られて(たとえば、増幅およびフィルタリングのために)、そしてA/Dコンバータ回路1038内に至る。A/Dコンバータ回路1038では、アナログ・センサ信号はデジタル値に変換されて、プロセッサ1020内での処理に備える。
【0096】
プロセッサ1020は、モータ/コンプレッサ制御ループのある特定の要素を実施するために、ソフトウェア命令を実行する。プロセッサ1020は、たとえば、汎用プロセッサまたはデジタル信号プロセッサ(DSP)によって実施してもよい。他の実施形態では、プロセッサ1020の機能を実施することを、ファームウェア(たとえば、EPROM内に記憶された命令)で行なってもよいし、またはハードウェア装置(たとえば、ASIC(特定用途向け集積回路)もしくはFPGA(フィールド・プログラマブル・ゲート・アレイ))における等価なロジックとして、行なってもよい。
【0097】
プロセッサ1020は、デジタル化されたセンサ信号および圧力測定値を、A/Dコンバータ・ブロック1038(値は、RAM1044を一時記憶用に用いる)を介して受け取り、実施される制御プロセス(たとえば、圧力制御または体積制御)に基づいて、適切な速度制御値を決定する。またプロセッサ1020は、電流転流状態が与えられたとして適切な転流制御信号を生成し、この転流制御信号のパルス幅を、速度制御値に基づいて変調する。三相インバータ1030には、変調された転流制御信号が入力される。
【0098】
三相インバータ1030によって、BLDCモータ1004内の個々のステータ・コイルに対して駆動信号が生成される。これは前述の通りである。またシステムは、三相インバータ・ブロック1030に接続される電流制限回路1034を含んでいてもよい。
【0099】
図11は、本発明の実施形態によるルーツ・ブロワの物理的構造の分解組立図である。図示したように、構造1100にはBLDCモータが含まれている。BLDCモータのステータは、中空の穴1108を囲んでおり、この穴1108内には、製造時に、ロータ1101が挿入される。ロータ1101は、BLDCモータ内の電圧印加されたステータ・コイルの影響で回転する。スタビライザ1102は、ロータ1101およびルーツ・ブロワ・インペラ1103が共有する回転軸をサポートしている。BLDCモータが強制的にロータ1101を回転させると、共有軸が強制的にインペラ1103を回転させる。
【0100】
インペラ1103は、インペラ軸の一方の端部がギア1105に結合された状態で、ルーツ・ブロワ・ハウジング1104内で回転する。また第2のインペラ(図示せず)が、ギア1105に、この第2のインペラがインペラ1103の対向方向に回転するように、結合されている。動作中、インペラの回転により、空気が強制的にインペラ間を流れて、さらなるエネルギーが生じ、圧力が形成される。ハウジング1104の両側における開口部が、空気の入力および出力経路となっている。
【0101】
図示したように、ブロワ・アセンブリの要素は、幅広のコネクタ1106によって周囲構造に横方向に結合され、長尺コネクタ1107によって長手方向に結合されている。これらのコネクタのサイズが大きくなっていることによって、装置に対するサポートが大きくなる一方で、ブロワ装置の運動に起因する振動が減衰される。
【0102】
図12に、ルーツ・ブロワ・インペラ1103および1203が連動する様子を例示する。この図では、インペラ1103およびロータ1101の共有軸が見えており、ルーツ・ブロワ・インペラが駆動されるメカニズムが示されている。ギア1201および1202の歯合によって、インペラ1103の軸からの対向する回転エネルギーが、インペラ1203の軸に移動する。
【0103】
V.ノイズ減少
ルート・ブロワは比較的騒音が多いため、および本発明の実施形態は、患者に極めて接近した状態で用いるように設計されているため、ブロワが生成するノイズを減衰させるための1つまたは複数の方法および特徴を、本発明の実施形態において実施してもよい。このような方法および特徴には、螺旋状のねじれ(図12に示したような)を有するブロワ・ロータを形成すること、および複数の弱音技術たとえば前述した騒音防止キャンセル方法を用いることが、含まれていてもよい。
【0104】
さらに本発明の実施形態には、穿孔チューブ・マフラを用いることが含まれていてもよい。穿孔チューブ・マフラでは、多数の穿孔が、各穿孔チューブのボディから、小さいチューブの形態で直角に突出しており、その結果、マフラ重量およびサイズの増加が伴うことなく音波を効率的に減衰できる、より長い効果的な弱音経路が形成される。穿孔チューブ・マフラは好ましくは、軽量のポリマーまたは他の頑丈だが軽量の材料から形成されている。
【0105】
図13Aに、本発明の一実施形態の空圧系経路およびノイズ減少チャンバの図を示す。図示したように、空気が、フィルタリングされた入口1300を通って人工呼吸器に入り、撚られた空圧系経路を、サイレンサ・チャンバ1303の底部に到達するまで横断する。サイレンサ・チャンバ1303の頂部付近で、空気は、ルーツ・ブロワ・アセンブリ1302の入口ポート内に送られる。圧縮空気は、ルーツ・ブロワ・アセンブリから出力されて、サイレンサ・チャンバ1304の上部内に至り、そしてチャンバ1304の底部(1301)から送られる。
【0106】
サイレンサ・チャンバ1303および1304にはそれぞれ、2つの穿孔されたマフラ・チューブ1305および1306が含まれている。これらは平行に、たとえば上下に、配置されている。図13Bに、頂部チューブ(1305)を取り除いたサイレンサ・チャンバを例示する。この結果、その下にあるチューブ1306のより明瞭な図が得られている。各サイレンサ・チャンバへの入力は、チューブ1305の一方の端部を通して行なわれ、排出は、対向する端部チューブ1306を通して行なわれる。したがって、空気は、チューブ1305から外へ流れて、チューブ1306を通って中へ流れる。コンプレッサ・ノイズに関連する圧力過渡現象は、小さい管状の穿孔が示す抵抗によって減衰される。さらに、ノイズ圧力波のコヒーレンスは、長さが異なる複数の小さい経路を強制的に横断させることによって、分散される。経路の長さが異なることで、個々の経路の空気流が、互いと位相がずれた状態で再結合するため、これまでコヒーレントだったノイズが拡散される。その結果、ほとんどのコンプレッサ・ノイズは、サイレンサ・チャンバを通過する間に減衰する。
【0107】
また本発明の実施形態には、ルーツ・ブロワのハウジング内に段階的スロットが含まれていてもよい。段階的スロットによって、ブロワ・ロータの前縁がブロワ出口ポートに近づくにつれて、徐々にガスを滑らかに逆流させることが可能になるため、ほとんどのノイズの原因である典型的なルーツ・ブロワ・パルシング効果が小さくなる。ルーツ・ブロワのハウジング内に段階的スロットを設けることによって、ノイズ減少が最大になる一方で、回転中にブロワ・チャンバ内に徐々に逆流させることを可能にする際の効率の減少が最小になる。
【0108】
図14A〜4Dに、ルーツ・ブロワ・ハウジング1400の種々の図を示す。オリフィス1401は、BLDCモータの方向に向いており、インペラ対を収容する。ハウジング1400の対向面1402には、2つのオリフィスが設けられている。この2つのオリフィスを通って、インペラの軸が延びて、ギア構造1105と嵌合している。オリフィス1401および対向面1402によって規定される軸に垂直に、空気入口1403および圧縮空気出力ポート1404が設けられている。入口および出力ポートは、たとえば、初期円形のくぼみ1405によって、管状の空気ガイド装置を受け入れるように構成されている。円形のくぼみ内には、くぼみ1405の面において概略三角形の断面と、湾曲した羽形状をと有するオリフィス1406があり、三角形のカット・アウトが、回転インペラを取り囲む二重の円形状に形成されたチャンバに接触している。また、溝1407が、オリフィス1406の内部に、三角形の辺に沿って概ね中間に、インペラの積み重ねと同じ平面内にアライメントされて、形成されている。溝1407は、三角形オリフィス1406の縁において最も深く、オリフィス1406から離れるに従って徐々に浅くなって、内部チャンバの面に至る。
【0109】
前述した技術、方法、および特徴によって、ルート・ブロワに一般的に関連するノイズが減り、患者に対するわずかな聴覚の不快感も最小になる。その結果、人工呼吸器装置を、患者に極めて接近した状態で用いることが、本発明の実施形態の重量または寸法をそれほど増やすことなく可能になり、そのため、携帯性が促進される。
【0110】
前述したノイズ減少技術と共にルーツ・ブロワの人工呼吸器において用いることにより、これまでは高性能な換気モードまたは患者の快適さを犠牲にしなければ達成できなかった人工呼吸器の小型化を改善することができる。
【0111】
以上、携帯型人工呼吸器について説明した。本明細書で説明した特定の実施形態は、単に例示的なものであり、それによって本発明を限定するものではない。本発明は、請求項およびそれらの均等物の完全な範囲によって、規定される。
【特許請求の範囲】
【請求項1】
携帯型人工呼吸器であって、
ルーツ・ブロワと、
前記ルーツ・ブロワのノイズを低減するための複数の穿孔チューブ・マフラと
を備える携帯型人工呼吸器。
【請求項2】
前記穿孔チューブ・マフラが搭載された少なくとも1つのサイレンサ・チャンバを更に備え、前記サイレンサ・チャンバは前記人工呼吸器の入口ポートまたは出口ポートに連結されている、請求項1に記載の携帯型人工呼吸器。
【請求項3】
前記ルーツ・ブロワの前記入口ポートに連結されている第1サイレンサ・チャンバと、前記ルーツ・ブロワの前記出口ポートに接続されている第2サイレンサ・チャンバとを更に備え、前記第1サイレンサ・チャンバ及び前記第2サイレンサ・チャンバの各々は、少なくとも1つの穿孔チューブ・マフラを含む、請求項1に記載の携帯型人工呼吸器。
【請求項4】
前記穿孔チューブ・マフラの各々は、該穿孔チューブ・マフラから垂直に穿孔された複数の管を含む、請求項1、2、または3に記載の携帯型人工呼吸器。
【請求項5】
携帯型人工呼吸器であって、
患者へのガス・フローを供給するブロワを備え、前記ブロワはアナログ・センサを含み、前記アナログ・センサは、連続的なロータ位置、クローズド・ループ制御に対する速度フィードバック、および信号をアナログから信号への変換回路に供給し、前記フィードバックにより、前記ブロワの性能を決定するためのセルフ・テストが生成される、携帯型人工呼吸器。
【請求項6】
前記ブロワのノイズを低減するためのノイズ減衰システムを更に備える、請求項5に記載の携帯型人工呼吸器。
【請求項7】
少なくとも1つのマイクロフォンおよび少なくとも1つのスピーカを更に備え、
前記マイクロフォンは、前記ブロワの音響ノイズをモニタして、該音響ノイズを示す信号を生成するように構成され、
前記スピーカは、前記信号に応答して前記ブロワのノイズを少なくとも部分的にキャンセルする騒音防止出力を生成するように構成される、請求項1、5、または6に記載の携帯型人工呼吸器。
【請求項1】
携帯型人工呼吸器であって、
ルーツ・ブロワと、
前記ルーツ・ブロワのノイズを低減するための複数の穿孔チューブ・マフラと
を備える携帯型人工呼吸器。
【請求項2】
前記穿孔チューブ・マフラが搭載された少なくとも1つのサイレンサ・チャンバを更に備え、前記サイレンサ・チャンバは前記人工呼吸器の入口ポートまたは出口ポートに連結されている、請求項1に記載の携帯型人工呼吸器。
【請求項3】
前記ルーツ・ブロワの前記入口ポートに連結されている第1サイレンサ・チャンバと、前記ルーツ・ブロワの前記出口ポートに接続されている第2サイレンサ・チャンバとを更に備え、前記第1サイレンサ・チャンバ及び前記第2サイレンサ・チャンバの各々は、少なくとも1つの穿孔チューブ・マフラを含む、請求項1に記載の携帯型人工呼吸器。
【請求項4】
前記穿孔チューブ・マフラの各々は、該穿孔チューブ・マフラから垂直に穿孔された複数の管を含む、請求項1、2、または3に記載の携帯型人工呼吸器。
【請求項5】
携帯型人工呼吸器であって、
患者へのガス・フローを供給するブロワを備え、前記ブロワはアナログ・センサを含み、前記アナログ・センサは、連続的なロータ位置、クローズド・ループ制御に対する速度フィードバック、および信号をアナログから信号への変換回路に供給し、前記フィードバックにより、前記ブロワの性能を決定するためのセルフ・テストが生成される、携帯型人工呼吸器。
【請求項6】
前記ブロワのノイズを低減するためのノイズ減衰システムを更に備える、請求項5に記載の携帯型人工呼吸器。
【請求項7】
少なくとも1つのマイクロフォンおよび少なくとも1つのスピーカを更に備え、
前記マイクロフォンは、前記ブロワの音響ノイズをモニタして、該音響ノイズを示す信号を生成するように構成され、
前記スピーカは、前記信号に応答して前記ブロワのノイズを少なくとも部分的にキャンセルする騒音防止出力を生成するように構成される、請求項1、5、または6に記載の携帯型人工呼吸器。
【図1】


【図2A】

【図2B】
【図3】
【図4】
【図5】
【図6A】
【図6B】

【図7】
【図8】
【図9A】
【図9B】
【図9C】

【図10】
【図11】

【図12】

【図13A】
【図13B】
【図14A】
【図14B】

【図14C】
【図14D】
【図2A】
【図2B】
【図3】
【図4】
【図5】
【図6A】
【図6B】
【図7】
【図8】
【図9A】
【図9B】
【図9C】
【図10】
【図11】
【図12】
【図13A】
【図13B】
【図14A】
【図14B】
【図14C】
【図14D】
【公開番号】特開2011−78854(P2011−78854A)
【公開日】平成23年4月21日(2011.4.21)
【国際特許分類】
【出願番号】特願2011−16540(P2011−16540)
【出願日】平成23年1月28日(2011.1.28)
【分割の表示】特願2006−522731(P2006−522731)の分割
【原出願日】平成16年8月4日(2004.8.4)
【出願人】(506039955)ケアフュージョン 203 インコーポレイテッド (8)
【氏名又は名称原語表記】CareFusion 203,Inc.
【公開日】平成23年4月21日(2011.4.21)
【国際特許分類】
【出願日】平成23年1月28日(2011.1.28)
【分割の表示】特願2006−522731(P2006−522731)の分割
【原出願日】平成16年8月4日(2004.8.4)
【出願人】(506039955)ケアフュージョン 203 インコーポレイテッド (8)
【氏名又は名称原語表記】CareFusion 203,Inc.
[ Back to top ]