
携帯型清掃用具
【課題】デジタルカメラのセンサ表面などの繊細な表面の清掃において、ごみの粒子を取り除くために使用する清掃用具を提供する。
【解決手段】選択的に作動される清掃用アクチュエータと、清掃用アクチュエータと結合した、複数の毛を有する清掃用部材とを備える清掃用具である。複数の毛は、高い静電気蓄積能力を備えるものである。清掃用アクチュエータは、清掃用部材を動作させるために作動させることができ、それにより毛を静電的に帯電させるのと同時に、ごみが毛から除去されるようにする。
【解決手段】選択的に作動される清掃用アクチュエータと、清掃用アクチュエータと結合した、複数の毛を有する清掃用部材とを備える清掃用具である。複数の毛は、高い静電気蓄積能力を備えるものである。清掃用アクチュエータは、清掃用部材を動作させるために作動させることができ、それにより毛を静電的に帯電させるのと同時に、ごみが毛から除去されるようにする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は清掃用具に関するものであり、より詳しくは、繊細な表面を清掃するための携帯型清掃用具に関するものである。
【0002】
<関連出願>
【0003】
本特許出願は、2005年6月8日付で出願された米国特許仮出願第60/886,336号の優先権を主張する。
【背景技術】
【0004】
デジタルカメラは、レンズを通して見える画像を映し出す電子センサ(例えば、電荷結合素子(CCD)センサ又は相補型金属酸化物半導体(CMOS)センサ)を、カメラのセンサチャンバ内に備えている。このセンサは、センサ上に映し出された画像を取得し、画像を電子データに変換することができ、その後、その電子データはデジタルカメラに備えられたデータ処理手段に送られる。次いで、データ処理手段は、この電子データを公知のフォーマットの画像ファイル(例えば、JPEG、TIFF又はRAWフォーマット)に変換し、その後、その画像ファイルはカメラのメモリカードに保存される。センサに付着した不純物は、望ましくないことに、カメラで撮った画像の最終的なイメージを変えてしまうこともあるため、当然のことながら、このセンサはできる限り清潔にしておく必要がある。
【0005】
デジタルカメラの通常の使用中に、そのセンサが空気及び空気中の不純物(例えば、空気中の小さなごみの粒子)にさらされるのは避けられない。より詳しくは、交換式レンズを使用するプロ向けのデジタルカメラ(例えば、デジタル一眼レフ(DSLR)カメラ)は、例えばレンズ交換などでカメラの本体からレンズが取り外されるとき、必然的にセンサは常に空気及び空気中の不純物にさらされる。
【0006】
それらデジタルカメラのセンサを清掃するため、より詳しくは、センサ表面からごみの粒子を取り除くため、デジタルカメラの所有者は、様々な清掃方法を考え出してきた。
【0007】
デジタルカメラの所有者が用いる共通の清掃手法は、スプレー缶式のエアダスタからセンサの表面近辺に直接空気を吹き付けるものである。この手法は、センサ上のごみを吹き飛ばすことに加えて、ごみの粒子を分散させ、ごみの粒子が除去できないという逆の効果もある。別の清掃手法は、缶に入った圧縮空気をブラシの毛に吹き付け、次にそのブラシでセンサの表面を掃くというものである。ブラシの毛に圧縮した空気を吹き付けるのには2つの理由がある。(1)ブラシの毛の間に存在し得る全ての不純物を吹き飛ばすため、及び(2)ブラシの毛を静電的に帯電させ、それによりカメラのセンサ上に存在するごみの粒子を吸着させるブラシの能力を高めるためである。
【0008】
しかしながら、この後者の手法にも欠点がある。実際、空気をブラシの毛に吹き付けるとき、スプレー缶式のエアダスタから液体が噴出する場合があり、そのブラシでセンサの表面を掃くと、センサの表面に望ましくない液体のしみをつけてしまうこともある。スプレー缶式のエアダスタを用いることの別の欠点は、その缶が加圧容器であるため、飛行機内に持ち込むことが禁止されていることである。このことは、例えば旅行写真家にとっては不便である。また、圧縮した空気を使用するエアダスタの缶は再利用できないため、その缶が空になると、それを処分して新しいものを購入しなければならない。
【発明の開示】
【課題を解決するための手段】
【0009】
本発明は、選択的に作動される清掃用アクチュエータと、高い静電気蓄積能力を備える複数の毛を有する、前記清掃用アクチュエータと結合した清掃用部材とを備え、前記毛を静電的に帯電させ、また同時に前記毛からごみが除去されるようにするために、前記清掃用部材を動作させるべく前記清掃用アクチュエータを作動させることができることを特徴とする清掃用具に関する。
【0010】
一実施形態では、前記清掃用具が持ち運び可能なものである。
【0011】
一実施形態では、前記清掃用アクチュエータがロータリーモータである。
【0012】
一実施形態では、前記清掃用具が、前記ロータリーモータの少なくとも一部が受け取られるようなケーシングを備える。
【0013】
一実施形態では、前記清掃用部材が、第1の端部にて前記ロータリーモータと結合し、第2の端部にて前記毛の房を有する細長い柄を画定するブラシである。
【0014】
一実施形態では、前記清掃用具が、前記ロータリーモータと着脱自在に結合可能な、前記ブラシを支持するブラシコネクタをさらに備え、前記ブラシが、前記ブラシコネクタを介して前記ロータリーモータと動作可能に、着脱自在に結合される。
【0015】
一実施形態では、前記ロータリーモータがシャフトを画定し、前記ブラシコネクタが、管状のソケット部及びその中に空洞を画定する結合部を画定する。この実施形態では、前記ブラシコネクタが、前記結合部の前記空洞内で前記シャフトの少なくとも一部と摩擦結合することによって、前記ロータリーモータと着脱自在に結合され、前記ブラシが、前記管状のソケット部内で前記ブラシの柄の前記第2の端部と着脱自在に摩擦結合することによって、前記ブラシコネクタと着脱自在に結合される。
【0016】
一実施形態では、前記ブラシ、前記ブラシコネクタ及び前記ロータリーモータの前記シャフトが、共通の長手方向軸線を画定し、前記ロータリーモータを作動させることにより、前記ブラシが前記共通の長手方向軸線を軸にして回転され、前記毛が放射状に扇形に広がるようにし、遠心加速度を生じさせて、前記毛に付着したごみの粒子を前記毛の房から除去するようにする。
【0017】
一実施形態では、前記毛の前記高い静電気蓄積能力が、前記毛の前加工において、前記毛を固有の静電気蓄積能力を有する材料で製造することによって、前記毛に与えられるようにする。
【0018】
一実施形態では、前記毛がポリアミド製である。
【0019】
一実施形態では、前記各毛が、40乃至60マイクロメートルの範囲の厚さである。
【0020】
一実施形態では、前記毛の前記静電気蓄積能力が、前記毛の後加工において、前記毛に化学物質を塗布することによって、前記毛に与えられるようにする。
【0021】
一実施形態では、前記毛の前記静電気蓄積能力が、前記毛の後加工において、前記毛にイオン化処理を行うことによって、前記毛に与えられるようにする。
【0022】
一実施形態では、前記毛の前記静電気蓄積能力が、全長で最大15ミリメートルの肉眼で見える粒子を吸着することができる。
【0023】
一実施形態では、前記毛の前記静電気蓄積能力が、全長で1マイクロメートルまでの微小な粒子を吸着することができる。
【0024】
本発明は、清掃用具を掃除するための方法に関するものでもあり、前記方法が、(a)選択的に作動される清掃用アクチュエータと、高い静電気蓄積能力を備える複数の毛を有する、前記清掃用アクチュエータと結合した清掃用部材とを備える、持ち運び可能な清掃用具を提供するステップと、(b)前記毛を静電的に帯電させ、また同時に前記毛の間に付着した不純物をそこから除去するため、前記清掃用部材を動作させるべく前記清掃用アクチュエータを作動させるステップとを含む。
【0025】
一実施形態では、前記清掃用アクチュエータが、シャフトを画定するロータリーモータを備え、前記ブラシコネクタが、管状のソケット部及びその中に空洞を画定する結合部を画定し、前記方法が、前記ステップ(b)を実行する前に、(aa)前記ブラシコネクタが、前記結合部の前記空洞内で前記シャフトの少なくとも一部と摩擦結合することによって、前記ロータリーモータと着脱自在に結合し、前記ブラシが、前記管状のソケット部内で前記ブラシの柄の第2の端部と着脱自在に摩擦結合することによって、前記ブラシコネクタと着脱自在に結合するステップを含む。
【0026】
一実施形態では、前記ブラシ、前記ブラシコネクタ及び前記モータの前記シャフトが、共通の長手方向軸線を画定し、前記ステップ(b)の実行中に、前記ブラシが前記共通の長手方向軸線を軸にして回転され、前記毛が放射状に扇形に広がるようにし、遠心加速度を生じさせて、前記毛の間に付着したごみの粒子を前記毛の房から除去するようにする。
【0027】
一実施形態では、前記方法が、前記ステップ(b)の実行後、繊細な表面からごみを取り除くため、前記清掃用具の前記毛が前記繊細な表面を掃くステップを含む。
【0028】
一実施形態では、前記方法が、前記ステップ(b)の実行後、繊細な表面からごみを取り除くため、前記清掃用具の前記毛を、前記繊細な表面から空間を空けないように近接させるステップを含む。
【発明を実施するための最良の形態】
【0029】
図1〜3は、本発明の一実施形態に係るデジタルカメラセンサ用の持ち運び可能な清掃用具10を図示する。センサ用の清掃用具10は、ハンドル部材12を備えるものであり、言い換えると、ケーシング14を備えている。ケーシング14は、細長い本体部14a、及び本体部14aの一方の端部から延出するネック部14bを画定する。
【0030】
図2に図示するように、ケーシング14は、少なくとも部分的に中空であり、バッテリ18で動作する電気式ロータリーモータ16などのブラシアクチュエータをその中に含む。バッテリ18は、当該技術分野で周知のように、例えばワイヤなどによってモータ16と電気的に結合する(図示せず)。ハンドル部材12には、バッテリ18によるモータ16の選択的な電力供給を制御するスイッチ20も備えられている。モータ16を作動させるため、(図2に示唆されているように)利用者は指Fでスイッチ20を押すことができる。
【0031】
モータ16は、モータ16のロータ(図示せず)と結合し、かつ一体となって回転するロータリーシャフト22を備える。シャフト22は、中空のケーシングのネック部14b内に延在する。
【0032】
清掃用具10は、ブラシアクチュエータと結合した清掃用部材も備える。より詳しくは、清掃用具10は、ブラシコネクタ30を介してモータ16と動作可能に結合する清掃ブラシ24を備える。ブラシコネクタ30は、円筒形の管状のソケット部32を備えるものであり、言い換えると、その内側に清掃ブラシ24の突き合わせ端部の挿入を可能にする開口を上部に有している。ソケット部32は、その周縁に、上端部からその底部の方に延在し、かつその底部に達しないところで終端する4つのスロット33を画定する。スロット33は、清掃ブラシ24がソケット部32に挿入されるのにつれて、ソケット32の一部を放射状に外側方向に開かせることを可能にする。
【0033】
さらに、ブラシコネクタ30は、細長いソケット部32の底部に、一体的に同軸上に取り付けられた細長い結合ピン34も備える。結合ピン34は、その外端の方に向けてテーパがついている。結合ピン34の外側自由端は、その中心に軸方向に孔が開けられており、従って、細長い円筒形の空洞35は、結合ピン34と同軸上に、結合ピン34に沿って延在する(図2のみに図示)。
【0034】
ブラシコネクタ30は、ケーシングのネック部14bの最外端の開口14cに、結合ピン34を挿入することによって、モータ16と結合することができ、モータのシャフト22は、結合ピン34の空洞35にきっちりと適切に摩擦結合する。
【0035】
上述したように、ブラシコネクタ30は、清掃ブラシ24をモータ16と動作可能に結合させるためのものである。清掃ブラシ24は、例えば木材製の柄25を備え、その突き合わせ端部25aは、ブラシコネクタのソケット部32の内腔に受け取られ、かつ摩擦結合するようになっている。柄25は、その上側端部25bにて、房28の毛29の束を保持する口金26の形状をなすブラシヘッドを備える。毛29は、デジタルカメラのセンサ上に存在し得るごみを吸着し、収集するため、デジタルカメラのセンサ近辺を掃くようなものであるが、その詳細は後述する。
【0036】
ケーシング14、モータシャフト22、ブラシ24、コネクタソケット部32及び結合ピン34は、全て細長い構造体であり、互いに同軸上に配置され、共通の長手方向軸線15を画定する。
【0037】
毛29は、ナイロン(登録商標)などのポリアミド材料を含む合成材料から作られることが好ましいが、羽毛、羊毛、又は毛皮などの天然材料から作られるようにすることもできる。さらに、毛29は次のような特性を備え得る。
【0038】
・好ましくは毛は柔らかく、弾性がある。毛の柔軟性及び弾性が十分ではない場合、使用中に毛がちぎれやすく、従って、ちぎれた毛の破片が、カメラセンサを入れ子にしたセンサチャンバ(図示せず)に入ってしまうこともある。さらに、より柔らかく、より弾性のある毛ほどちぎれにくく、従って、より耐久性がある。最終的に、繊細な表面(例えば、カメラセンサの表面)を傷つけることなく、その表面近辺を掃けるように、毛は十分に繊細なものであるべき必要がある。
【0039】
・好ましくは毛の厚さは40乃至60μmの範囲内である。
【0040】
・毛は高い静電気蓄積能力を有する。ごみの粒子、及びその他の肉眼で見える不純物(例えば、最大全長が15mm)、及び好ましくは微小な不純物(最小全長が1μm)を静電的に吸着できるようにするために、毛は容易に静電気を蓄積することができる。この特性は、(1)前加工中に、固有の静電気蓄積能力を有する材料から毛を生成することによって、又は(2)後加工中に、生成された毛に化学物質を添加する或いはイオン化処理をすることによって、毛に与えられ得る。
【0041】
・化学物質に対する高い耐性。毛の化学的組成における様々な変化は、ごみを静電的に吸着するための毛の能力に影響を与え得るため、この特性は望ましいものである。
【0042】
毛の房28の幅は、その毛の房が清掃を行う予定の光学センサの大きさに適合させるべきである。毛の房28は、例えば1乃至60ミリメートルの範囲の幅を有するものであり、好ましくは、カメラのセンサチャンバに適合するように十分小さく、かつ1回の動作でカメラのセンサ表面全体を掃けるような十分大きいものにすべきである。さらに、センサを掃くのに清掃ブラシを用いるとき、口金30及びセンサチャンバの壁の間に空間が存在するようにし、従って口金でセンサチャンバの壁を傷つけることがないようにするため、口金26の幅は、毛の房の幅よりも小さいものでなければならない。例えば、20mmの幅を有する口金26、及び24mmの幅を有する毛29の房を備えるブラシは、36mm×24mmの寸法を有するフルフレームセンサを清掃するときに用いられるのが好ましい。
【0043】
図示した実施形態に係る清掃用具は、異なる寸法のブラシを受け取ることができるようにするためモジュール方式で作られる。これは図3に図示するようなものである。図3の清掃用具10及び10´は、各々、異なる大きさのブラシ24、24´、及び相補的なブラシコネクタ30、30´を備える。これらブラシ/コネクタの組み合わせは、異なる寸法を有しているが、同じハンドル部材12に結合することができる。
【0044】
清掃用具10を使えるようにするため、最初にそれを組み立てなければならない。そうするために、まず利用者は、必要に応じてバッテリハウジングにバッテリ18を挿入する。次いで、利用者は、所望の寸法の清掃ブラシ24を選択し、その柄の突き合せ端部25aを、対応するブラシコネクタのソケット32に挿入する。そして、利用者は、ブラシコネクタ30の結合ピン34を、ケーシングのネック部の開口14cから挿入し、結合ピンの空洞35においてモータシャフト22を摩擦結合させることによって、ブラシコネクタ30をモータ16と結合する。
【0045】
カメラセンサなどの表面を清掃する前に、毛の房28から、毛の房に吸着した大気中のごみの粒子、及び/又は前に清掃用具を使用した後から毛29の房の中に残ったままのごみの粒子を取り除くことが望ましい。また、毛29が清掃されるべき表面からごみを静電的に吸着し、収集することができるようにするために、毛29を静電的に帯電させる必要がある。
【0046】
そうするために、利用者はスイッチ20を押してモータ16を作動させ、結果として細長いブラシ24が、その長手方向軸線を回転軸として、実質的に高速で回転するようにする。これにより、ブラシの毛29は、図2に図示するように放射状に扇形に広がる。ブラシ24の回転は、2つの効果を有する。
【0047】
・ブラシの毛29は、大気中の空気分子に対して相対的に迅速に移動する。上述したように、毛29は、静電気を容易に蓄積するような固有の能力を有する。従って、回転する毛が大気中の空気分子と摩擦することにより、毛に生じる静電気が増加する。
【0048】
・毛29の間に付着したごみの粒子Pを遠心力で加速させ、毛28の房から除去されるようにする。
【0049】
従って、モータ16を作動させることにより、毛29を帯電させるのと同時に、その毛29の間に存在し得るごみの粒子及びその他の様々な不純物をブラシ24から除去することから、清掃されるべき表面に清掃用具10を使用するための準備が行われる。
【0050】
次いで、ブラシの先端をデジタルカメラのセンサチャンバに挿入し、毛の房28でカメラのセンサ表面の全域を掃く。毛28の先端部及びカメラのセンサの機械的な接触は可能だが、それは本質的なものではない。実際、毛の先端を、カメラのセンサに対して空間を空けないように近接させる手法は、静電的に帯電させた毛によってごみが吸着されるようにする、及び静電的に帯電させた毛にごみを引き付けるようにするのに十分なものであり、ごみを除去するのに十分に使用できるものである。毛29は静電的に帯電されるので、センサの表面に存在するごみの粒子は、ブラシの毛に吸着し、従って、センサ表面から取り除かれる。
【0051】
本発明の範囲から逸脱することなく、上述した実施形態を変形させることもできる。例えば、清掃ブラシの回転速度を変化させるために、利用者が様々なモータ速度(例えば、5000乃至20000RPM)を選択することができるような手段を、清掃用具に備えることもできる。また、清掃用アクチュエータは、単なるロータリーモータ以外のものにすることもできる。例えばそれは、毛を静電的に帯電させるため、また毛の間に付着した不純物をブラシから除去するため、清掃ブラシ24及びその毛29の振動、回転、超音波処理、往復軸線方向運動、又はこれら動作の組み合わせを生じさせるように選択的に作動される動力式アクチュエータであり得る。
【0052】
また、モータは、バッテリを必要としない別の清掃用アクチュエータ、例えば、手動でクランクを回転することによって作動させることができる一連の協働するギアからなる手動アクチュエータと置換され得る。
【0053】
また、ブラシは、適切な形状をなす、複数の毛を備える様々な適切な清掃用部材と置換され得る。ただし、この清掃用部材は、適切な清掃用アクチュエータと動作可能に結合するようなものである。
【0054】
清掃用具にブラシコネクタ30をモジュール方式で提供すること、及びモータ16に清掃ブラシ24を着脱自在に結合することは、随意的なものであることも理解されたい。様々な適切な固定手段(恒久的な固定手段か着脱可能な固定手段かを問わず)が、清掃用部材を清掃用アクチュエータに固定するのに使用され得ることを理解されたい。また、清掃ブラシは、様々な従来の方式で、清掃用アクチュエータと直接的に結合され得る。
【0055】
図4は、本発明の別の実施形態に係る清掃用具110を図示する。清掃用具110は、ケーシング114を画定するハンドル部材112を備えるものであり、言い換えると、人間工学的に形成された本体部114a及びネック部114bを画定する。ケーシング114は、その中にモータ(図示せず)を内蔵し、そのモータは、ケーシングのネック部114bに少なくとも一部が延在するロータリーシャフト(図示せず)を有する。モータの回転運動は、スイッチ120によって制御される。さらに、清掃用具110は、管状の柄125(例えば、金属製)を画定するブラシ部材124を有し、その柄の上端は、毛の房128の周囲でプレスされる。柄125は、その底部にコネクタ部材130(例えば、樹脂製)を固定的に備える。コネクタ部材130は、その中に、図2のブラシコネクタ30の空洞35と同様な空洞(図示せず)を画定し、清掃用具のロータリーモータのシャフトを、その中で適切に摩擦結合させることができる。図4の実施形態では、ブラシ部材124及びコネクタ部材130が、固定的に一体に組み立てられており、この固定されたアセンブリ全体を、ハンドル部材112に対して着脱することができる。さらに、清掃用具110には、中空の細長い保護キャップ150が備えられる。保護キャップ150をブラシ124の周囲にはめ、保護キャップ150の内側周壁に設けられた突起154が、ケーシングのネック部114bに設けられた溝152に摩擦結合する位置まで保護キャップ150をひねることによって、保護キャップ150をケーシング114に固定することができる。
【0056】
また、本発明の清掃用具は、デジタルカメラのセンサ用の清掃用具として説明してきたが、本発明の清掃用具は、他の繊細な表面、例えば、光学部材、すなわちカメラレンズの様々なガラス部品、SLRカメラの鏡、ネガフィルム、透明な部品、デジタルイメージングデバイスなどの電気光学装置などを清掃するのに用いることもできることに留意されたい。
【図面の簡単な説明】
【0057】
【図1】本発明の一実施形態に係る清掃用具の斜視図である。
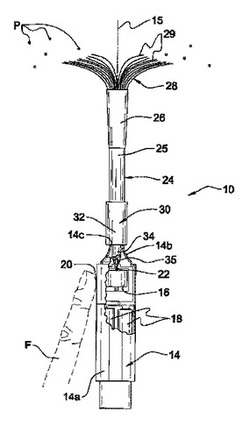
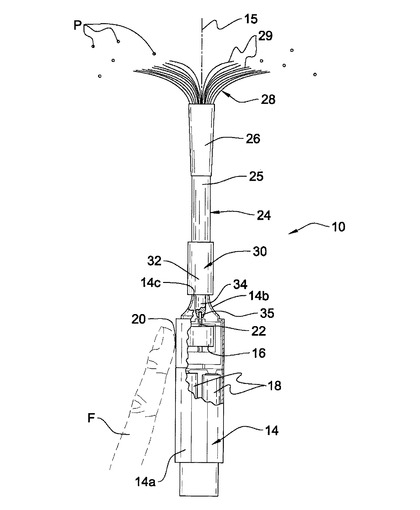
【図2】ハンドル部材及びブラシコネクタの一部が切り取られた、図1の清掃用具の正面図であり、利用者が清掃用具を作動させると、どのようにブラシの毛が扇形に広がり、ごみが除去されるのかを示す図である。
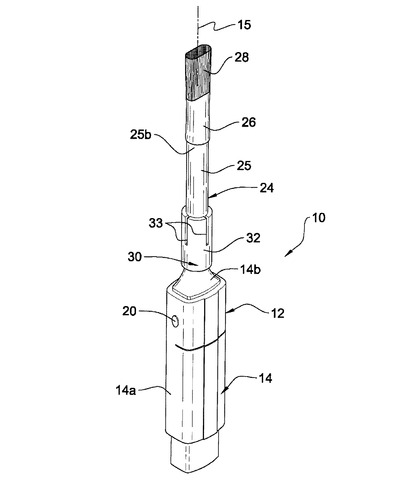
【図3】図1の実施形態に係る清掃用具で、互いに異なる大きさのブラシ及び対応するブラシコネクタを有する2つの清掃用具の分解正面斜視図である。
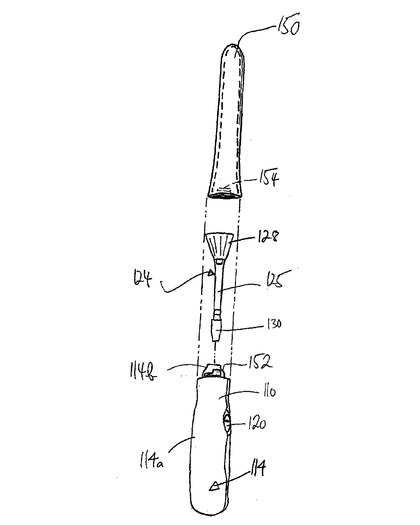
【図4】本発明の別の実施形態に係る清掃用具の部分分解正面図である。
【技術分野】
【0001】
本発明は清掃用具に関するものであり、より詳しくは、繊細な表面を清掃するための携帯型清掃用具に関するものである。
【0002】
<関連出願>
【0003】
本特許出願は、2005年6月8日付で出願された米国特許仮出願第60/886,336号の優先権を主張する。
【背景技術】
【0004】
デジタルカメラは、レンズを通して見える画像を映し出す電子センサ(例えば、電荷結合素子(CCD)センサ又は相補型金属酸化物半導体(CMOS)センサ)を、カメラのセンサチャンバ内に備えている。このセンサは、センサ上に映し出された画像を取得し、画像を電子データに変換することができ、その後、その電子データはデジタルカメラに備えられたデータ処理手段に送られる。次いで、データ処理手段は、この電子データを公知のフォーマットの画像ファイル(例えば、JPEG、TIFF又はRAWフォーマット)に変換し、その後、その画像ファイルはカメラのメモリカードに保存される。センサに付着した不純物は、望ましくないことに、カメラで撮った画像の最終的なイメージを変えてしまうこともあるため、当然のことながら、このセンサはできる限り清潔にしておく必要がある。
【0005】
デジタルカメラの通常の使用中に、そのセンサが空気及び空気中の不純物(例えば、空気中の小さなごみの粒子)にさらされるのは避けられない。より詳しくは、交換式レンズを使用するプロ向けのデジタルカメラ(例えば、デジタル一眼レフ(DSLR)カメラ)は、例えばレンズ交換などでカメラの本体からレンズが取り外されるとき、必然的にセンサは常に空気及び空気中の不純物にさらされる。
【0006】
それらデジタルカメラのセンサを清掃するため、より詳しくは、センサ表面からごみの粒子を取り除くため、デジタルカメラの所有者は、様々な清掃方法を考え出してきた。
【0007】
デジタルカメラの所有者が用いる共通の清掃手法は、スプレー缶式のエアダスタからセンサの表面近辺に直接空気を吹き付けるものである。この手法は、センサ上のごみを吹き飛ばすことに加えて、ごみの粒子を分散させ、ごみの粒子が除去できないという逆の効果もある。別の清掃手法は、缶に入った圧縮空気をブラシの毛に吹き付け、次にそのブラシでセンサの表面を掃くというものである。ブラシの毛に圧縮した空気を吹き付けるのには2つの理由がある。(1)ブラシの毛の間に存在し得る全ての不純物を吹き飛ばすため、及び(2)ブラシの毛を静電的に帯電させ、それによりカメラのセンサ上に存在するごみの粒子を吸着させるブラシの能力を高めるためである。
【0008】
しかしながら、この後者の手法にも欠点がある。実際、空気をブラシの毛に吹き付けるとき、スプレー缶式のエアダスタから液体が噴出する場合があり、そのブラシでセンサの表面を掃くと、センサの表面に望ましくない液体のしみをつけてしまうこともある。スプレー缶式のエアダスタを用いることの別の欠点は、その缶が加圧容器であるため、飛行機内に持ち込むことが禁止されていることである。このことは、例えば旅行写真家にとっては不便である。また、圧縮した空気を使用するエアダスタの缶は再利用できないため、その缶が空になると、それを処分して新しいものを購入しなければならない。
【発明の開示】
【課題を解決するための手段】
【0009】
本発明は、選択的に作動される清掃用アクチュエータと、高い静電気蓄積能力を備える複数の毛を有する、前記清掃用アクチュエータと結合した清掃用部材とを備え、前記毛を静電的に帯電させ、また同時に前記毛からごみが除去されるようにするために、前記清掃用部材を動作させるべく前記清掃用アクチュエータを作動させることができることを特徴とする清掃用具に関する。
【0010】
一実施形態では、前記清掃用具が持ち運び可能なものである。
【0011】
一実施形態では、前記清掃用アクチュエータがロータリーモータである。
【0012】
一実施形態では、前記清掃用具が、前記ロータリーモータの少なくとも一部が受け取られるようなケーシングを備える。
【0013】
一実施形態では、前記清掃用部材が、第1の端部にて前記ロータリーモータと結合し、第2の端部にて前記毛の房を有する細長い柄を画定するブラシである。
【0014】
一実施形態では、前記清掃用具が、前記ロータリーモータと着脱自在に結合可能な、前記ブラシを支持するブラシコネクタをさらに備え、前記ブラシが、前記ブラシコネクタを介して前記ロータリーモータと動作可能に、着脱自在に結合される。
【0015】
一実施形態では、前記ロータリーモータがシャフトを画定し、前記ブラシコネクタが、管状のソケット部及びその中に空洞を画定する結合部を画定する。この実施形態では、前記ブラシコネクタが、前記結合部の前記空洞内で前記シャフトの少なくとも一部と摩擦結合することによって、前記ロータリーモータと着脱自在に結合され、前記ブラシが、前記管状のソケット部内で前記ブラシの柄の前記第2の端部と着脱自在に摩擦結合することによって、前記ブラシコネクタと着脱自在に結合される。
【0016】
一実施形態では、前記ブラシ、前記ブラシコネクタ及び前記ロータリーモータの前記シャフトが、共通の長手方向軸線を画定し、前記ロータリーモータを作動させることにより、前記ブラシが前記共通の長手方向軸線を軸にして回転され、前記毛が放射状に扇形に広がるようにし、遠心加速度を生じさせて、前記毛に付着したごみの粒子を前記毛の房から除去するようにする。
【0017】
一実施形態では、前記毛の前記高い静電気蓄積能力が、前記毛の前加工において、前記毛を固有の静電気蓄積能力を有する材料で製造することによって、前記毛に与えられるようにする。
【0018】
一実施形態では、前記毛がポリアミド製である。
【0019】
一実施形態では、前記各毛が、40乃至60マイクロメートルの範囲の厚さである。
【0020】
一実施形態では、前記毛の前記静電気蓄積能力が、前記毛の後加工において、前記毛に化学物質を塗布することによって、前記毛に与えられるようにする。
【0021】
一実施形態では、前記毛の前記静電気蓄積能力が、前記毛の後加工において、前記毛にイオン化処理を行うことによって、前記毛に与えられるようにする。
【0022】
一実施形態では、前記毛の前記静電気蓄積能力が、全長で最大15ミリメートルの肉眼で見える粒子を吸着することができる。
【0023】
一実施形態では、前記毛の前記静電気蓄積能力が、全長で1マイクロメートルまでの微小な粒子を吸着することができる。
【0024】
本発明は、清掃用具を掃除するための方法に関するものでもあり、前記方法が、(a)選択的に作動される清掃用アクチュエータと、高い静電気蓄積能力を備える複数の毛を有する、前記清掃用アクチュエータと結合した清掃用部材とを備える、持ち運び可能な清掃用具を提供するステップと、(b)前記毛を静電的に帯電させ、また同時に前記毛の間に付着した不純物をそこから除去するため、前記清掃用部材を動作させるべく前記清掃用アクチュエータを作動させるステップとを含む。
【0025】
一実施形態では、前記清掃用アクチュエータが、シャフトを画定するロータリーモータを備え、前記ブラシコネクタが、管状のソケット部及びその中に空洞を画定する結合部を画定し、前記方法が、前記ステップ(b)を実行する前に、(aa)前記ブラシコネクタが、前記結合部の前記空洞内で前記シャフトの少なくとも一部と摩擦結合することによって、前記ロータリーモータと着脱自在に結合し、前記ブラシが、前記管状のソケット部内で前記ブラシの柄の第2の端部と着脱自在に摩擦結合することによって、前記ブラシコネクタと着脱自在に結合するステップを含む。
【0026】
一実施形態では、前記ブラシ、前記ブラシコネクタ及び前記モータの前記シャフトが、共通の長手方向軸線を画定し、前記ステップ(b)の実行中に、前記ブラシが前記共通の長手方向軸線を軸にして回転され、前記毛が放射状に扇形に広がるようにし、遠心加速度を生じさせて、前記毛の間に付着したごみの粒子を前記毛の房から除去するようにする。
【0027】
一実施形態では、前記方法が、前記ステップ(b)の実行後、繊細な表面からごみを取り除くため、前記清掃用具の前記毛が前記繊細な表面を掃くステップを含む。
【0028】
一実施形態では、前記方法が、前記ステップ(b)の実行後、繊細な表面からごみを取り除くため、前記清掃用具の前記毛を、前記繊細な表面から空間を空けないように近接させるステップを含む。
【発明を実施するための最良の形態】
【0029】
図1〜3は、本発明の一実施形態に係るデジタルカメラセンサ用の持ち運び可能な清掃用具10を図示する。センサ用の清掃用具10は、ハンドル部材12を備えるものであり、言い換えると、ケーシング14を備えている。ケーシング14は、細長い本体部14a、及び本体部14aの一方の端部から延出するネック部14bを画定する。
【0030】
図2に図示するように、ケーシング14は、少なくとも部分的に中空であり、バッテリ18で動作する電気式ロータリーモータ16などのブラシアクチュエータをその中に含む。バッテリ18は、当該技術分野で周知のように、例えばワイヤなどによってモータ16と電気的に結合する(図示せず)。ハンドル部材12には、バッテリ18によるモータ16の選択的な電力供給を制御するスイッチ20も備えられている。モータ16を作動させるため、(図2に示唆されているように)利用者は指Fでスイッチ20を押すことができる。
【0031】
モータ16は、モータ16のロータ(図示せず)と結合し、かつ一体となって回転するロータリーシャフト22を備える。シャフト22は、中空のケーシングのネック部14b内に延在する。
【0032】
清掃用具10は、ブラシアクチュエータと結合した清掃用部材も備える。より詳しくは、清掃用具10は、ブラシコネクタ30を介してモータ16と動作可能に結合する清掃ブラシ24を備える。ブラシコネクタ30は、円筒形の管状のソケット部32を備えるものであり、言い換えると、その内側に清掃ブラシ24の突き合わせ端部の挿入を可能にする開口を上部に有している。ソケット部32は、その周縁に、上端部からその底部の方に延在し、かつその底部に達しないところで終端する4つのスロット33を画定する。スロット33は、清掃ブラシ24がソケット部32に挿入されるのにつれて、ソケット32の一部を放射状に外側方向に開かせることを可能にする。
【0033】
さらに、ブラシコネクタ30は、細長いソケット部32の底部に、一体的に同軸上に取り付けられた細長い結合ピン34も備える。結合ピン34は、その外端の方に向けてテーパがついている。結合ピン34の外側自由端は、その中心に軸方向に孔が開けられており、従って、細長い円筒形の空洞35は、結合ピン34と同軸上に、結合ピン34に沿って延在する(図2のみに図示)。
【0034】
ブラシコネクタ30は、ケーシングのネック部14bの最外端の開口14cに、結合ピン34を挿入することによって、モータ16と結合することができ、モータのシャフト22は、結合ピン34の空洞35にきっちりと適切に摩擦結合する。
【0035】
上述したように、ブラシコネクタ30は、清掃ブラシ24をモータ16と動作可能に結合させるためのものである。清掃ブラシ24は、例えば木材製の柄25を備え、その突き合わせ端部25aは、ブラシコネクタのソケット部32の内腔に受け取られ、かつ摩擦結合するようになっている。柄25は、その上側端部25bにて、房28の毛29の束を保持する口金26の形状をなすブラシヘッドを備える。毛29は、デジタルカメラのセンサ上に存在し得るごみを吸着し、収集するため、デジタルカメラのセンサ近辺を掃くようなものであるが、その詳細は後述する。
【0036】
ケーシング14、モータシャフト22、ブラシ24、コネクタソケット部32及び結合ピン34は、全て細長い構造体であり、互いに同軸上に配置され、共通の長手方向軸線15を画定する。
【0037】
毛29は、ナイロン(登録商標)などのポリアミド材料を含む合成材料から作られることが好ましいが、羽毛、羊毛、又は毛皮などの天然材料から作られるようにすることもできる。さらに、毛29は次のような特性を備え得る。
【0038】
・好ましくは毛は柔らかく、弾性がある。毛の柔軟性及び弾性が十分ではない場合、使用中に毛がちぎれやすく、従って、ちぎれた毛の破片が、カメラセンサを入れ子にしたセンサチャンバ(図示せず)に入ってしまうこともある。さらに、より柔らかく、より弾性のある毛ほどちぎれにくく、従って、より耐久性がある。最終的に、繊細な表面(例えば、カメラセンサの表面)を傷つけることなく、その表面近辺を掃けるように、毛は十分に繊細なものであるべき必要がある。
【0039】
・好ましくは毛の厚さは40乃至60μmの範囲内である。
【0040】
・毛は高い静電気蓄積能力を有する。ごみの粒子、及びその他の肉眼で見える不純物(例えば、最大全長が15mm)、及び好ましくは微小な不純物(最小全長が1μm)を静電的に吸着できるようにするために、毛は容易に静電気を蓄積することができる。この特性は、(1)前加工中に、固有の静電気蓄積能力を有する材料から毛を生成することによって、又は(2)後加工中に、生成された毛に化学物質を添加する或いはイオン化処理をすることによって、毛に与えられ得る。
【0041】
・化学物質に対する高い耐性。毛の化学的組成における様々な変化は、ごみを静電的に吸着するための毛の能力に影響を与え得るため、この特性は望ましいものである。
【0042】
毛の房28の幅は、その毛の房が清掃を行う予定の光学センサの大きさに適合させるべきである。毛の房28は、例えば1乃至60ミリメートルの範囲の幅を有するものであり、好ましくは、カメラのセンサチャンバに適合するように十分小さく、かつ1回の動作でカメラのセンサ表面全体を掃けるような十分大きいものにすべきである。さらに、センサを掃くのに清掃ブラシを用いるとき、口金30及びセンサチャンバの壁の間に空間が存在するようにし、従って口金でセンサチャンバの壁を傷つけることがないようにするため、口金26の幅は、毛の房の幅よりも小さいものでなければならない。例えば、20mmの幅を有する口金26、及び24mmの幅を有する毛29の房を備えるブラシは、36mm×24mmの寸法を有するフルフレームセンサを清掃するときに用いられるのが好ましい。
【0043】
図示した実施形態に係る清掃用具は、異なる寸法のブラシを受け取ることができるようにするためモジュール方式で作られる。これは図3に図示するようなものである。図3の清掃用具10及び10´は、各々、異なる大きさのブラシ24、24´、及び相補的なブラシコネクタ30、30´を備える。これらブラシ/コネクタの組み合わせは、異なる寸法を有しているが、同じハンドル部材12に結合することができる。
【0044】
清掃用具10を使えるようにするため、最初にそれを組み立てなければならない。そうするために、まず利用者は、必要に応じてバッテリハウジングにバッテリ18を挿入する。次いで、利用者は、所望の寸法の清掃ブラシ24を選択し、その柄の突き合せ端部25aを、対応するブラシコネクタのソケット32に挿入する。そして、利用者は、ブラシコネクタ30の結合ピン34を、ケーシングのネック部の開口14cから挿入し、結合ピンの空洞35においてモータシャフト22を摩擦結合させることによって、ブラシコネクタ30をモータ16と結合する。
【0045】
カメラセンサなどの表面を清掃する前に、毛の房28から、毛の房に吸着した大気中のごみの粒子、及び/又は前に清掃用具を使用した後から毛29の房の中に残ったままのごみの粒子を取り除くことが望ましい。また、毛29が清掃されるべき表面からごみを静電的に吸着し、収集することができるようにするために、毛29を静電的に帯電させる必要がある。
【0046】
そうするために、利用者はスイッチ20を押してモータ16を作動させ、結果として細長いブラシ24が、その長手方向軸線を回転軸として、実質的に高速で回転するようにする。これにより、ブラシの毛29は、図2に図示するように放射状に扇形に広がる。ブラシ24の回転は、2つの効果を有する。
【0047】
・ブラシの毛29は、大気中の空気分子に対して相対的に迅速に移動する。上述したように、毛29は、静電気を容易に蓄積するような固有の能力を有する。従って、回転する毛が大気中の空気分子と摩擦することにより、毛に生じる静電気が増加する。
【0048】
・毛29の間に付着したごみの粒子Pを遠心力で加速させ、毛28の房から除去されるようにする。
【0049】
従って、モータ16を作動させることにより、毛29を帯電させるのと同時に、その毛29の間に存在し得るごみの粒子及びその他の様々な不純物をブラシ24から除去することから、清掃されるべき表面に清掃用具10を使用するための準備が行われる。
【0050】
次いで、ブラシの先端をデジタルカメラのセンサチャンバに挿入し、毛の房28でカメラのセンサ表面の全域を掃く。毛28の先端部及びカメラのセンサの機械的な接触は可能だが、それは本質的なものではない。実際、毛の先端を、カメラのセンサに対して空間を空けないように近接させる手法は、静電的に帯電させた毛によってごみが吸着されるようにする、及び静電的に帯電させた毛にごみを引き付けるようにするのに十分なものであり、ごみを除去するのに十分に使用できるものである。毛29は静電的に帯電されるので、センサの表面に存在するごみの粒子は、ブラシの毛に吸着し、従って、センサ表面から取り除かれる。
【0051】
本発明の範囲から逸脱することなく、上述した実施形態を変形させることもできる。例えば、清掃ブラシの回転速度を変化させるために、利用者が様々なモータ速度(例えば、5000乃至20000RPM)を選択することができるような手段を、清掃用具に備えることもできる。また、清掃用アクチュエータは、単なるロータリーモータ以外のものにすることもできる。例えばそれは、毛を静電的に帯電させるため、また毛の間に付着した不純物をブラシから除去するため、清掃ブラシ24及びその毛29の振動、回転、超音波処理、往復軸線方向運動、又はこれら動作の組み合わせを生じさせるように選択的に作動される動力式アクチュエータであり得る。
【0052】
また、モータは、バッテリを必要としない別の清掃用アクチュエータ、例えば、手動でクランクを回転することによって作動させることができる一連の協働するギアからなる手動アクチュエータと置換され得る。
【0053】
また、ブラシは、適切な形状をなす、複数の毛を備える様々な適切な清掃用部材と置換され得る。ただし、この清掃用部材は、適切な清掃用アクチュエータと動作可能に結合するようなものである。
【0054】
清掃用具にブラシコネクタ30をモジュール方式で提供すること、及びモータ16に清掃ブラシ24を着脱自在に結合することは、随意的なものであることも理解されたい。様々な適切な固定手段(恒久的な固定手段か着脱可能な固定手段かを問わず)が、清掃用部材を清掃用アクチュエータに固定するのに使用され得ることを理解されたい。また、清掃ブラシは、様々な従来の方式で、清掃用アクチュエータと直接的に結合され得る。
【0055】
図4は、本発明の別の実施形態に係る清掃用具110を図示する。清掃用具110は、ケーシング114を画定するハンドル部材112を備えるものであり、言い換えると、人間工学的に形成された本体部114a及びネック部114bを画定する。ケーシング114は、その中にモータ(図示せず)を内蔵し、そのモータは、ケーシングのネック部114bに少なくとも一部が延在するロータリーシャフト(図示せず)を有する。モータの回転運動は、スイッチ120によって制御される。さらに、清掃用具110は、管状の柄125(例えば、金属製)を画定するブラシ部材124を有し、その柄の上端は、毛の房128の周囲でプレスされる。柄125は、その底部にコネクタ部材130(例えば、樹脂製)を固定的に備える。コネクタ部材130は、その中に、図2のブラシコネクタ30の空洞35と同様な空洞(図示せず)を画定し、清掃用具のロータリーモータのシャフトを、その中で適切に摩擦結合させることができる。図4の実施形態では、ブラシ部材124及びコネクタ部材130が、固定的に一体に組み立てられており、この固定されたアセンブリ全体を、ハンドル部材112に対して着脱することができる。さらに、清掃用具110には、中空の細長い保護キャップ150が備えられる。保護キャップ150をブラシ124の周囲にはめ、保護キャップ150の内側周壁に設けられた突起154が、ケーシングのネック部114bに設けられた溝152に摩擦結合する位置まで保護キャップ150をひねることによって、保護キャップ150をケーシング114に固定することができる。
【0056】
また、本発明の清掃用具は、デジタルカメラのセンサ用の清掃用具として説明してきたが、本発明の清掃用具は、他の繊細な表面、例えば、光学部材、すなわちカメラレンズの様々なガラス部品、SLRカメラの鏡、ネガフィルム、透明な部品、デジタルイメージングデバイスなどの電気光学装置などを清掃するのに用いることもできることに留意されたい。
【図面の簡単な説明】
【0057】
【図1】本発明の一実施形態に係る清掃用具の斜視図である。
【図2】ハンドル部材及びブラシコネクタの一部が切り取られた、図1の清掃用具の正面図であり、利用者が清掃用具を作動させると、どのようにブラシの毛が扇形に広がり、ごみが除去されるのかを示す図である。
【図3】図1の実施形態に係る清掃用具で、互いに異なる大きさのブラシ及び対応するブラシコネクタを有する2つの清掃用具の分解正面斜視図である。
【図4】本発明の別の実施形態に係る清掃用具の部分分解正面図である。
【特許請求の範囲】
【請求項1】
清掃用具であって、
選択的に作動される清掃用アクチュエータと、
高い静電気蓄積能力を備える複数の毛を有する、前記清掃用アクチュエータと結合した清掃用部材とを備え、
前記毛を静電的に帯電させ、また同時に前記毛からごみが除去されるようにするために、前記清掃用部材を動作させるべく前記清掃用アクチュエータを作動させることができることを特徴とする清掃用具。
【請求項2】
前記清掃用具が、持ち運び可能であることを特徴とする請求項1に記載の清掃用具。
【請求項3】
前記清掃用アクチュエータが、ロータリーモータであることを特徴とする請求項2に記載の清掃用具。
【請求項4】
前記ロータリーモータの少なくとも一部が受け取られるようなケーシングをさらに備えることを特徴とする請求項2に記載の清掃用具。
【請求項5】
前記清掃用部材が、第1の端部にて前記ロータリーモータと結合し、第2の端部にて前記毛の房を有する細長い柄を画定するブラシであることを特徴とする請求項3に記載の清掃用具。
【請求項6】
前記ロータリーモータと着脱自在に結合可能な、前記ブラシを支持するブラシコネクタをさらに備え、
前記ブラシが、前記ブラシコネクタを介して前記ロータリーモータと動作可能に、着脱自在に結合されることを特徴とする請求項5に記載の清掃用具。
【請求項7】
前記ロータリーモータがシャフトを画定し、
前記ブラシコネクタが、管状のソケット部及びその中に空洞を画定する結合部を画定し、
前記ブラシコネクタが、前記結合部の前記空洞内で前記シャフトの少なくとも一部と摩擦結合することによって、前記ロータリーモータと着脱自在に結合され、
前記ブラシが、前記管状のソケット部内で前記ブラシの柄の前記第2の端部と着脱自在に摩擦結合することによって、前記ブラシコネクタと着脱自在に結合されることを特徴とする請求項6に記載の清掃用具。
【請求項8】
前記ブラシ、前記ブラシコネクタ及び前記ロータリーモータの前記シャフトが、共通の長手方向軸線を画定し、
前記ロータリーモータを作動させることにより、前記ブラシが前記共通の長手方向軸線を軸にして回転され、前記毛が放射状に扇形に広がるようにし、遠心加速度を生じさせて、前記毛に付着したごみの粒子を前記毛の房から除去するようにすることを特徴とする請求項7に記載の清掃用具。
【請求項9】
前記毛の前記高い静電気蓄積能力が、前記毛の前加工において、前記毛を固有の静電気蓄積能力を有する材料で製造することによって、前記毛に与えられるようにすることを特徴とする請求項1に記載の清掃用具。
【請求項10】
前記毛が、ポリアミド製であることを特徴とする請求項16に記載の清掃用具。
【請求項11】
前記各毛が、40乃至60マイクロメートルの範囲の厚さであることを特徴とする請求項17に記載の清掃用具。
【請求項12】
前記毛の前記静電気蓄積能力が、前記毛の後加工において、前記毛に化学物質を塗布することによって、前記毛に与えられるようにすることを特徴とする請求項1に記載の清掃用具。
【請求項13】
前記毛の前記静電気蓄積能力が、前記毛の後加工において、前記毛にイオン化処理を行うことによって、前記毛に与えられるようにすることを特徴とする請求項1に記載の清掃用具。
【請求項14】
前記毛の前記静電気蓄積能力が、全長で最大15ミリメートルの肉眼で見える粒子を吸着することができることを特徴とする請求項1に記載の清掃用具。
【請求項15】
前記毛の前記静電気蓄積能力が、全長で1マイクロメートルまでの微小な粒子を吸着することができることを特徴とする請求項1に記載の清掃用具。
【請求項16】
清掃用具を掃除するための方法であって、
(a)選択的に作動される清掃用アクチュエータと、高い静電気蓄積能力を備える複数の毛を有する、前記清掃用アクチュエータと結合した清掃用部材とを備える、持ち運び可能な清掃用具を提供するステップと、
(b)前記毛を静電的に帯電させ、また同時に前記毛の間に付着した不純物をそこから除去するため、前記清掃用部材を動作させるべく前記清掃用アクチュエータを作動させるステップとを含むことを特徴とする方法。
【請求項17】
前記清掃用アクチュエータが、シャフトを画定するロータリーモータを備え、
前記ブラシコネクタが、管状のソケット部及びその中に空洞を画定する結合部を画定し、
前記方法が、前記ステップ(b)を実行する前に、
(aa)前記ブラシコネクタが、前記結合部の前記空洞内で前記シャフトの少なくとも一部と摩擦結合することによって、前記ロータリーモータと着脱自在に結合し、前記ブラシが、前記管状のソケット部内で前記ブラシの柄の前記第2の端部と着脱自在に摩擦結合することによって、前記ブラシコネクタと着脱自在に結合するステップを含むことを特徴とする請求項16に記載の清掃用具を掃除するための方法。
【請求項18】
前記ブラシ、前記ブラシコネクタ及び前記モータの前記シャフトが、共通の長手方向軸線を画定し、
前記ステップ(b)の実行中に、前記ブラシが前記共通の長手方向軸線を軸にして回転され、前記毛が放射状に扇形に広がるようにし、遠心加速度を生じさせて、前記毛の間に付着したごみの粒子を前記毛の房から除去するようにすることを特徴とする請求項17に記載の清掃用具を掃除するための方法。
【請求項19】
前記方法が、前記ステップ(b)の実行後、
繊細な表面からごみを取り除くため、前記清掃用具の前記毛が前記繊細な表面を掃くステップを含むことを特徴とする請求項16に記載の清掃用具を掃除するための方法。
【請求項20】
前記方法が、前記ステップ(b)の実行後、
繊細な表面からごみを取り除くため、前記清掃用具の前記毛を、前記繊細な表面から空間をあけないように近接させるステップを含むことを特徴とする請求項16に記載の清掃用具を掃除するための方法。
【請求項1】
清掃用具であって、
選択的に作動される清掃用アクチュエータと、
高い静電気蓄積能力を備える複数の毛を有する、前記清掃用アクチュエータと結合した清掃用部材とを備え、
前記毛を静電的に帯電させ、また同時に前記毛からごみが除去されるようにするために、前記清掃用部材を動作させるべく前記清掃用アクチュエータを作動させることができることを特徴とする清掃用具。
【請求項2】
前記清掃用具が、持ち運び可能であることを特徴とする請求項1に記載の清掃用具。
【請求項3】
前記清掃用アクチュエータが、ロータリーモータであることを特徴とする請求項2に記載の清掃用具。
【請求項4】
前記ロータリーモータの少なくとも一部が受け取られるようなケーシングをさらに備えることを特徴とする請求項2に記載の清掃用具。
【請求項5】
前記清掃用部材が、第1の端部にて前記ロータリーモータと結合し、第2の端部にて前記毛の房を有する細長い柄を画定するブラシであることを特徴とする請求項3に記載の清掃用具。
【請求項6】
前記ロータリーモータと着脱自在に結合可能な、前記ブラシを支持するブラシコネクタをさらに備え、
前記ブラシが、前記ブラシコネクタを介して前記ロータリーモータと動作可能に、着脱自在に結合されることを特徴とする請求項5に記載の清掃用具。
【請求項7】
前記ロータリーモータがシャフトを画定し、
前記ブラシコネクタが、管状のソケット部及びその中に空洞を画定する結合部を画定し、
前記ブラシコネクタが、前記結合部の前記空洞内で前記シャフトの少なくとも一部と摩擦結合することによって、前記ロータリーモータと着脱自在に結合され、
前記ブラシが、前記管状のソケット部内で前記ブラシの柄の前記第2の端部と着脱自在に摩擦結合することによって、前記ブラシコネクタと着脱自在に結合されることを特徴とする請求項6に記載の清掃用具。
【請求項8】
前記ブラシ、前記ブラシコネクタ及び前記ロータリーモータの前記シャフトが、共通の長手方向軸線を画定し、
前記ロータリーモータを作動させることにより、前記ブラシが前記共通の長手方向軸線を軸にして回転され、前記毛が放射状に扇形に広がるようにし、遠心加速度を生じさせて、前記毛に付着したごみの粒子を前記毛の房から除去するようにすることを特徴とする請求項7に記載の清掃用具。
【請求項9】
前記毛の前記高い静電気蓄積能力が、前記毛の前加工において、前記毛を固有の静電気蓄積能力を有する材料で製造することによって、前記毛に与えられるようにすることを特徴とする請求項1に記載の清掃用具。
【請求項10】
前記毛が、ポリアミド製であることを特徴とする請求項16に記載の清掃用具。
【請求項11】
前記各毛が、40乃至60マイクロメートルの範囲の厚さであることを特徴とする請求項17に記載の清掃用具。
【請求項12】
前記毛の前記静電気蓄積能力が、前記毛の後加工において、前記毛に化学物質を塗布することによって、前記毛に与えられるようにすることを特徴とする請求項1に記載の清掃用具。
【請求項13】
前記毛の前記静電気蓄積能力が、前記毛の後加工において、前記毛にイオン化処理を行うことによって、前記毛に与えられるようにすることを特徴とする請求項1に記載の清掃用具。
【請求項14】
前記毛の前記静電気蓄積能力が、全長で最大15ミリメートルの肉眼で見える粒子を吸着することができることを特徴とする請求項1に記載の清掃用具。
【請求項15】
前記毛の前記静電気蓄積能力が、全長で1マイクロメートルまでの微小な粒子を吸着することができることを特徴とする請求項1に記載の清掃用具。
【請求項16】
清掃用具を掃除するための方法であって、
(a)選択的に作動される清掃用アクチュエータと、高い静電気蓄積能力を備える複数の毛を有する、前記清掃用アクチュエータと結合した清掃用部材とを備える、持ち運び可能な清掃用具を提供するステップと、
(b)前記毛を静電的に帯電させ、また同時に前記毛の間に付着した不純物をそこから除去するため、前記清掃用部材を動作させるべく前記清掃用アクチュエータを作動させるステップとを含むことを特徴とする方法。
【請求項17】
前記清掃用アクチュエータが、シャフトを画定するロータリーモータを備え、
前記ブラシコネクタが、管状のソケット部及びその中に空洞を画定する結合部を画定し、
前記方法が、前記ステップ(b)を実行する前に、
(aa)前記ブラシコネクタが、前記結合部の前記空洞内で前記シャフトの少なくとも一部と摩擦結合することによって、前記ロータリーモータと着脱自在に結合し、前記ブラシが、前記管状のソケット部内で前記ブラシの柄の前記第2の端部と着脱自在に摩擦結合することによって、前記ブラシコネクタと着脱自在に結合するステップを含むことを特徴とする請求項16に記載の清掃用具を掃除するための方法。
【請求項18】
前記ブラシ、前記ブラシコネクタ及び前記モータの前記シャフトが、共通の長手方向軸線を画定し、
前記ステップ(b)の実行中に、前記ブラシが前記共通の長手方向軸線を軸にして回転され、前記毛が放射状に扇形に広がるようにし、遠心加速度を生じさせて、前記毛の間に付着したごみの粒子を前記毛の房から除去するようにすることを特徴とする請求項17に記載の清掃用具を掃除するための方法。
【請求項19】
前記方法が、前記ステップ(b)の実行後、
繊細な表面からごみを取り除くため、前記清掃用具の前記毛が前記繊細な表面を掃くステップを含むことを特徴とする請求項16に記載の清掃用具を掃除するための方法。
【請求項20】
前記方法が、前記ステップ(b)の実行後、
繊細な表面からごみを取り除くため、前記清掃用具の前記毛を、前記繊細な表面から空間をあけないように近接させるステップを含むことを特徴とする請求項16に記載の清掃用具を掃除するための方法。
【図1】


【図2】
【図3】

【図4】
【図2】
【図3】
【図4】
【公表番号】特表2008−542020(P2008−542020A)
【公表日】平成20年11月27日(2008.11.27)
【国際特許分類】
【出願番号】特願2008−515010(P2008−515010)
【出願日】平成18年6月2日(2006.6.2)
【国際出願番号】PCT/CA2006/000907
【国際公開番号】WO2006/130963
【国際公開日】平成18年12月14日(2006.12.14)
【出願人】(508015564)1317442 アルバータ・リミテッド (1)
【Fターム(参考)】
【公表日】平成20年11月27日(2008.11.27)
【国際特許分類】
【出願日】平成18年6月2日(2006.6.2)
【国際出願番号】PCT/CA2006/000907
【国際公開番号】WO2006/130963
【国際公開日】平成18年12月14日(2006.12.14)
【出願人】(508015564)1317442 アルバータ・リミテッド (1)
【Fターム(参考)】
[ Back to top ]