
携帯型無線タグ通信装置
【課題】一般の携帯情報端末を装着し、バーコード読み取りを可能とした携帯型無線タグ通信装置において、光学読み取りへの障害が生じることなく、バーコード読み取りを円滑に実行する。
【解決手段】リーダ1は、バーコードリーダモジュール40が備えられたPDA30を着脱可能に支持する着脱部7、及び、リーダアンテナ10、を備えたリーダ本体1Aと、着脱部7に装着された状態のPDA30に備えられたバーコードリーダモジュール40を前後進退駆動する駆動ローラ9とを有している。そして、バーコードリーダモジュール40による読み取りを実行するか否かを判断する。そして、バーコードリーダモジュール40による読み取りを実行すると判断された場合には、リーダアンテナ10側の前方位置にPDA30に備えられたバーコードリーダモジュール40を駆動するように、駆動ローラ9を制御する。
【解決手段】リーダ1は、バーコードリーダモジュール40が備えられたPDA30を着脱可能に支持する着脱部7、及び、リーダアンテナ10、を備えたリーダ本体1Aと、着脱部7に装着された状態のPDA30に備えられたバーコードリーダモジュール40を前後進退駆動する駆動ローラ9とを有している。そして、バーコードリーダモジュール40による読み取りを実行するか否かを判断する。そして、バーコードリーダモジュール40による読み取りを実行すると判断された場合には、リーダアンテナ10側の前方位置にPDA30に備えられたバーコードリーダモジュール40を駆動するように、駆動ローラ9を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、無線タグに対して無線通信を行う、携帯型無線タグ通信装置に関する。
【背景技術】
【0002】
従来、無線通信機能に加え、光学読み取り機能を設けた携帯型無線タグ通信装置が、例えば特許文献1に開示されている。この従来技術の携帯型情報読取装置は、光学読み取り手段としての光学コード読取部と、RFタグ処理部とを有している。光学コード読み取り部は、バーコード等の光学情報を読み取る。RFタグ処理部は、装置アンテナを用いて無線タグとの間で通信を行う。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−183732号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来技術のように光学読み取り機能と無線通信機能とを備えている場合でも、両機能が同時に使用されることはなく、いずれか一方の機能が選択的に使用される。したがって、例えば光学読み取りの際には、無線通信に係わる構成が当該読み取りのための光照射を阻害しないように配慮される。上記従来技術では、ユーザが把持する把持部としてのグリップ部の上部に水平に配置された本体の先端に、光学読み取りを行うための読取口が設けられている。その一方で、水平な本体の先端部よりやや後方側の下部に、装置アンテナが鉛直方向に設けられている。これにより、本体の先端部の読取口をバーコード等に接して光学読み取りが行われる際に、装置アンテナがユーザの操作の邪魔にならずまた光照射を阻害しない。
【0005】
一方、近年、光学読み取り機能を備えた携帯情報端末が、多くのユーザに広く普及している。そこで、携帯型無線タグ通信装置に対し、既にユーザが所有している上記携帯情報端末を装着可能とすることで、当該携帯情報端末の光学読み取り機能を活用することが考えられつつある。この携帯型無線タグ通信装置では、装着した携帯情報端末の光学読み取り機能を活用することで、上記従来技術と同様、無線通信機能と光学読み取り機能との両機能が実現される。しかしながら、このような携帯情報端末を装着可能とした携帯型無線タグ通信装置において、前述のように、光照射への障害が生じないようにする構成は、従来存在しなかった。なお、光学読み取りとして、上記光照射以外にもCCDカメラ等による露光を行う場合もある。この場合も上記と同様の課題があった。
【0006】
本発明の目的は、一般の携帯情報端末を装着しバーコード読み取りを可能とした携帯型無線タグ通信装置において、光学読み取りへの障害が生じることなく、バーコード読み取りを円滑に実行することができる構成を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、第1の発明は、バーコードを光学的に読み取り可能な光学読み取り手段が備えられた携帯情報端末を着脱可能に支持する着脱部、及び、無線タグに対し無線通信を行うための装置アンテナ、を備えたリーダ本体と、前記着脱部に装着された状態の前記携帯情報端末を前後進退駆動する進退駆動手段と、前記光学読み取り手段による読み取りを実行するか否かを判断する判断手段と、前記判断手段により前記光学読み取り手段による読み取りを実行すると判断された場合には、前記装置アンテナ側の前方位置に前記携帯情報端末に備えられた前記光学読み取り手段を駆動するように、前記進退駆動手段を制御する進退制御手段とを有することを特徴とする。
【0008】
本願第1発明においては、装置アンテナにより無線タグと無線通信を行うことができると共に、携帯情報端末を装着してバーコードを読み取ることができる。リーダ本体には着脱部が備えられており、この着脱部が携帯情報端末を着脱可能に支持する。着脱部に携帯情報端末が装着されると、その装着された状態の携帯情報端末は、進退駆動手段によって前後方向に進退駆動される。その進退駆動手段による進退駆動を、判断手段による判断結果に応じて、進退制御手段が制御する。
【0009】
具体的には、判断手段が光学読み取り手段による読み取りを実行するか否かを判断する。そして、判断手段が光学読み取り手段によるバーコードの読み取りを実行すると判断した場合には、進退駆動手段は、携帯情報端末に備えられた光学読み取り手段を前方位置に駆動する。この携帯情報端末の光学読み取り手段の前方位置への移動により、装置アンテナが光学読み取り手段による光学読み取り範囲を阻害しなくなる。
【0010】
以上のようにして、本願第1発明においては、一般の携帯情報端末を装着し、バーコード読み取りを可能とした携帯型無線タグ通信装置において、光学読み取りへの障害が生じることなく、バーコード読み取りを円滑に実行することができる。
【0011】
第2の発明は、上記第1発明において、前記判断手段は、前記光学読み取り手段による読み取りを実行するか前記装置アンテナによる無線通信を実行するかを判断し、前記進退制御手段は、前記判断手段により前記装置アンテナによる無線通信を実行すると判断された場合には、前記光学読み取り手段が前記装置アンテナの放射指向性方向とは逆方向であって当該装置アンテナのアンテナ素子よりも後方となる後方位置に前記携帯情報端末に備えられた前記光学読み取り手段を駆動するように、前記進退駆動手段を制御することを特徴とする。
【0012】
本願第2発明においては、判断手段が光学読み取り手段による読み取りを実行するか装置アンテナによる無線通信を実行するかを判断する。そして、判断手段が装置アンテナによる無線タグとの無線通信を実行すると判断した場合には、進退駆動手段は、携帯情報端末に備えられた前記光学読み取り手段を後方位置に駆動する。この携帯情報端末の光学読み取り手段の後方位置への移動により、光学読み取り手段が装置アンテナの放射指向性方向とは逆方向であって当該装置アンテナのアンテナ素子よりも後方となり、無線通信を阻害しなくなる。これにより、電波放射への障害が生じることなく、無線通信を円滑に実行することができる。
【0013】
第3の発明は、上記第2発明において、前記リーダ本体は、前記着脱部が設けられた本体筐体と、前記本体筐体の前方側に対して回転可能に接続され、前記装置アンテナが設けられたアンテナ筐体と、前記アンテナ筐体を前記本体筐体に対し回動駆動する回動駆動手段とを備えており、かつ、前記判断手段により前記光学読み取り手段による読み取りを実行すると判断された場合には、前記アンテナ筐体と前記本体筐体とが前後方向に連続する上方位置に前記アンテナ筐体を回転させ、前記判断手段により前記装置アンテナによる無線通信を実行すると判断された場合には、前記上方位置から下方に下がった下方位置に前記アンテナ筐体を回転させるように、前記回動駆動手段を制御する回転制御手段を設け、前記進退制御手段は、前記判断手段により前記光学読み取り手段による読み取りを実行すると判断された場合には、前記上方位置に回転した状態の前記アンテナ筐体上の前記前方位置に前記携帯情報端末に備えられた前記光学読み取り手段を駆動するように、前記進退駆動手段を制御することを特徴とする。
【0014】
本願第3発明においては、判断手段が光学読み取り手段によるバーコードの読み取りを実行すると判断した場合には、回転制御手段の制御により上方位置にアンテナ筐体が回転し、進退制御手段の制御により当該上方位置に回転したアンテナ筐体上の前方位置に携帯情報端末の光学読み取り手段が移動する。一方、判断手段が装置アンテナによる無線通信を実行すると判断した場合には、回転制御手段の制御により下方位置にアンテナ筐体が回転する。
【0015】
これにより、光学読み取り手段による読み取りを行う際には、アンテナ筐体を上方位置へと回転させることで、下方のアンテナが邪魔になることなく円滑に光学読み取り手段が装置下方のバーコードを読み取ることができる。また、装置アンテナによる無線タグとの無線通信を行う際には、アンテナ筐体を下方位置へと回転させることで、装置全体の前後方向寸法を縮小し操作性を向上することができる。
【0016】
第4発明は、上記第3発明において、前記リーダ本体の前記着脱部は、前記光学読み取り手段の光学読み取り方向が下向きとなるように前記携帯情報端末を装着し、前記アンテナ筐体は、前記前方位置に駆動された前記携帯情報端末の前記光学読み取り手段からの照射光を透過させるための透過部を備えており、前記進退制御手段は、前記判断手段により前記光学読み取り手段による読み取りを実行すると判断された場合には、前記上方位置に回転した状態の前記アンテナ筐体上で前記照射光が前記透過部を透過するような前記前方位置に前記携帯情報端末に備えられた前記光学読み取り手段を駆動するように、前記進退駆動手段を制御することを特徴とする。
【0017】
本願第4発明においては、アンテナ筐体が透過部を備えており、光学読み取り手段は、照射光を当該透過部の下方へと透過させつつ、バーコードの読み取りを行うことができる。この結果、進退駆動手段は、上方位置に回転した状態のアンテナ筐体上で携帯情報端末の光学読み取り手段をアンテナ筐体の最前端まで駆動する必要はなく、照射光が透過部を透過するような前方位置にまで携帯情報端末の光学読み取り手段を駆動すれば足りる。このように、進退駆動手段による携帯情報端末の前後方向駆動距離を低減することができるので、操作者の操作性を向上することができる。
【0018】
第5発明は、上記第1乃至第4発明のいずれかにおいて、前記携帯情報端末より出力された、前記光学読み取り手段による前記バーコードの読み取りを行う光学読み取りモード、若しくは、前記装置アンテナによる前記無線通信を実行するタグ通信モード、のいずれか一方を選択する、モード選択信号が入力される選択信号入力手段を有し、前記判断手段は、前記選択信号入力手段により、前記光学読み取りモードが選択された前記モード選択信号が入力された場合には、前記光学読み取り手段による読み取りを実行すると判断し、前記タグ通信モードが選択された前記モード選択信号が入力された場合には、前記装置アンテナによる無線通信を実行すると判断し、前記進退駆動手段は、前記判断手段により前記光学読み取り手段による読み取りを実行すると判断された場合には、前記前方位置に前記携帯情報端末に備えられた前記光学読み取り手段を駆動し、前記判断手段により前記装置アンテナによる無線通信を実行すると判断された場合には、前記後方位置に前記携帯情報端末に備えられた前記光学読み取り手段を駆動するように、前記進退駆動手段を制御することを特徴とする。
【0019】
本願第5発明においては、操作者が携帯情報端末において光学読み取りモードを選択すると、選択信号入力手段が、当該光学読み取りモードの選択に対応したモード選択信号を入力する。これに応じて、判断手段が光学読み取り手段による読み取りを実行すると判断し、進退駆動手段が前方位置に携帯情報端末の光学読み取り手段を駆動するので、装置アンテナが光学読み取り手段の光学読み取り範囲を阻害しなくなる。
【0020】
操作者が携帯情報端末においてタグ通信モードを選択すると、選択信号入力手段が、当該タグ通信モードの選択に対応したモード選択信号を入力する。これに応じて、判断手段が装置アンテナによる無線通信を実行すると判断し、進退駆動手段が後方位置に携帯情報端末の光学読み取り手段を駆動するので、光学読み取り手段が装置アンテナの無線通信を阻害しなくなる。
【0021】
以上のようにして、本願第5発明においては、操作者が携帯情報端末を操作してモード選択を行うだけで、自動的に携帯情報端末の前後方向駆動が行われ、バーコード読み取り及び無線通信を円滑に実行することができる。
【0022】
第6発明は、上記第3又は第4発明において、前記リーダ本体は、前記本体筐体の下部に位置し、操作者が把持操作可能な把持部を備えており、前記判断手段は、前記把持部の所定の態様の把持操作に基づく操作情報が取得されたら、前記後方位置に前記携帯情報端末に備えられた前記光学読み取り手段が位置していた場合には前記光学読み取り手段による読み取りを実行すると判断し、前記前方位置に前記携帯情報端末に備えられた前記光学読み取り手段が位置していた場合には前記装置アンテナによる無線通信を実行すると判断し、前記進退駆動手段は、前記判断手段により前記光学読み取り手段による読み取りを実行すると判断された場合には、前記携帯情報端末に備えられた前記光学読み取り手段を前記前方位置へと駆動し、前記判断手段により前記装置アンテナによる無線通信を実行すると判断された場合には、前記携帯情報端末に備えられた前記光学読み取り手段を前記後方位置へと駆動するように、前記進退駆動手段を制御することを特徴とする。
【0023】
本願第6発明においては、携帯情報端末の光学読み取り手段が後方位置に位置している状態で、操作者がバーコードの読み取りを意図する場合は、操作者は、把持部を所定の態様で把持操作すればよい。これにより、判断手段が光学読み取り手段による読み取りを実行すると判断し、進退駆動手段が後方位置から前方位置へと携帯情報端末の光学読み取り手段を駆動するので、装置アンテナが光学読み取り手段の光学読み取り範囲を阻害しなくなる。
【0024】
逆に、携帯情報端末の光学読み取り手段が前方位置に位置している状態で、操作者がタグとの通信を意図する場合も、操作者は、把持部を所定の態様で把持操作すればよい。これにより、判断手段が装置アンテナによる無線通信を実行すると判断し、進退駆動手段が前方位置から後方位置へと携帯情報端末の光学読み取り手段を駆動するので、光学読み取り手段が装置アンテナの無線通信を阻害しなくなる。
【0025】
このようにして、本願第6発明においては、操作者が把持部において所定の態様で把持操作を行うだけで、自動的に携帯情報端末の前後方向駆動が行われ、バーコード読み取り及び無線通信を円滑に実行することができる。
【発明の効果】
【0026】
本発明によれば、一般の携帯情報端末を装着し、バーコード読み取りを可能とした携帯型無線タグ通信装置において、光学読み取りへの障害が生じることなく、バーコード読み取りを円滑に実行することができる。
【図面の簡単な説明】
【0027】
【図1】本発明の一実施形態の携帯型無線タグ通信装置の外観構成を表す説明図である。
【図2】リーダ及びPDAの機能的構成を表すブロック図である。
【図3】バーコードの読み取りを実行すると判断された場合の、リーダの外観図である。
【図4】無線タグとの無線通信を実行すると判断された場合の、リーダの外観図である。
【図5】PDAの制御部によって実行される制御手順を表すフローチャートである。
【図6】ステップSP15の詳細手順、及び、リーダの制御回路によって実行される制御手順を、リーダ及びPDAの間で送受される各種信号の送受と共に表すシーケンス図である。
【図7】ステップSP20の詳細手順、及び、リーダの制御回路によって実行される制御手順を、リーダ及びPDAの間で送受される各種信号の送受と共に表すシーケンス図である。
【図8】アンテナ筐体が前方側に回転する変形例において、リーダの外観構成を表す説明図である。
【図9】リーダ及びPDAの機能的構成を表すブロック図である。
【図10】バーコードの読み取りを実行すると判断された場合の、リーダの外観図である。
【図11】無線タグとの無線通信を実行すると判断された場合の、リーダの外観図である。
【図12】ステップSP15の詳細手順、及び、リーダの制御回路によって実行される制御手順を、リーダ及びPDAの間で送受される各種信号の送受と共に表すシーケンス図である。
【図13】ステップSP20の詳細手順、及び、リーダの制御回路によって実行される制御手順を、リーダ及びPDAの間で送受される各種信号の送受と共に表すシーケンス図である。
【図14】アンテナ筐体が前方側に回転する変形例において、リーダの外観構成を表す説明図である。
【図15】リーダ及びPDAの機能的構成を表すブロック図である。
【図16】バーコードの読み取りを実行すると判断された場合の、リーダの外観図である。
【図17】無線タグとの無線通信を実行すると判断された場合の、リーダの外観図である。
【図18】ステップSP15の詳細手順、及び、リーダの制御回路によって実行される制御手順を、リーダ及びPDAの間で送受される各種信号の送受と共に表すシーケンス図である。
【図19】トリガスイッチの把持操作に応じてモード選択する変形例において、リーダの制御回路によって実行される制御手順を表すフローチャートである。
【図20】PDAの制御部によって実行される制御手順、及び、ステップSR115の詳細手順を、リーダ及びPDAの間で送受される各種信号の送受と共に表すシーケンス図である。
【図21】PDAの制御部によって実行される制御手順、及び、ステップSR120の詳細手順を、リーダ及びPDAの間で送受される各種信号の送受と共に表すシーケンス図である。
【図22】バーコードリーダモジュールの光照射方向が前向きである変形例において、リーダの外観構成を表す説明図である。
【図23】携帯情報端末として携帯電話を用いる変形例において、携帯電話の外観構成を表す説明図である。
【発明を実施するための形態】
【0028】
以下、本発明の一実施の形態を図面を参照しつつ説明する。
【0029】
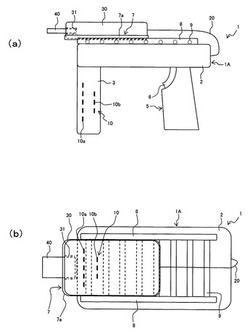
図1を用いて、本実施形態の携帯型無線タグ通信装置であるリーダの外観構成を説明する。なお、図1(a)は、リーダを側方から見た外観図であり、図1(b)は、リーダを上方から見た外観図である。
【0030】
図1(a)及び図1(b)において、本実施形態の携帯型無線タグ通信装置としてのリーダ1は、操作者が把持操作可能な把持部5を備えた、いわゆるガンタイプである。このリーダ1は、本体筐体2、アンテナ筐体3、及び把持部5を備えたリーダ本体1Aを有している。
【0031】
本体筐体2の上辺には、前後方向(図1(a)及び図1(b)中の左右方向)に沿って、複数(図示の例では8個)の駆動ローラ9を備えたレール8が設けられている。
【0032】
各駆動ローラ9は、搬送用モータ14(後述の図2参照)の駆動力が図示しないギヤ機構を介し伝達されることによって、それぞれ同期して回転駆動される。
【0033】
また、本体筐体2の上部には、着脱部7が設けられている。着脱部7は、携帯情報端末としてのPersonal Digital Assistant(以下「PDA」と称する)30を着脱可能に支持する。この着脱部7は、設置用の台座7a及び固定用の固定部材(図示せず)より構成されている。
【0034】
着脱部7の台座7aは、上記レール8の間に配置されている。したがって、台座7aは、上記複数の駆動ローラ9が回転駆動されることにより、レール8に沿って前後方向に駆動される。これにより、上記着脱部7に装着された状態のPDA30は、台座7aの移動に伴い、同様に駆動される。
【0035】
すなわち、上記複数の駆動ローラ9は、それぞれ協調して台座7aをレール8に沿って前後方向に駆動することにより、間接的に、着脱部7に装着された状態のPDA30を前後進退駆動することができる。
【0036】
アンテナ筐体3は、上記本体筐体2の前端部(図1(a)中の左端部)に、当該本体筐体2に対し略垂直となるように立設されている。このアンテナ筐体3には、装置アンテナとしてのリーダアンテナ10が設けられている。
【0037】
リーダアンテナ10は、無線タグT(後述の図2参照)に対し無線通信を行う。このリーダアンテナ10は、周知の放射器10a及び反射器10b等から構成されている。なお、これら放射器10a及び反射器10b等が、各請求項記載のアンテナ素子に相当する。
【0038】
把持部5は、上記本体筐体2の後方下部(図1(a)中の右方下部)に設けられている。この把持部5は、トリガスイッチ6を備えている。トリガスイッチ6は、後述するバーコード読み取り、若しくは、無線通信、の開始又は停止を指示するために用いられる。
【0039】
一方、上記着脱部7に装着される上記PDA30は、その前端部(図1(a)中の左端部)に、例えば周知のSDメモリカード等を挿抜可能なスロット31を備えている。このスロット31には、SDメモリカード型のバーコードリーダモジュール40が挿入されている。したがって、上記のようにしてPDA30が前後方向に移動することに伴い、このバーコードリーダモジュール40も前後方向に移動する。
【0040】
バーコードリーダモジュール40は、光学読み取り手段として機能し、バーコードB(後述の図2参照)を光学的に読み取ることができる。なお、PDA30自身が光学読み取り手段を備えていてもよい。
【0041】
本実施形態においては、PDA30は、スロット31に挿入されるバーコードリーダモジュール40の光学読み取り方向、すなわち光照射方向が下向きとなるように、着脱部7に装着されている。言い換えれば、PDA30は、スロット31に挿入されるバーコードリーダモジュール40による光学読み取り範囲、すなわち光照射範囲L(後述の図2及び図3参照)が下方向(後述の図3中の下方向)に形成されるように、着脱部7に装着されている。
【0042】
また、リーダ1及びPDA30は、例えばUniversal Serial Bus(USB)ケーブル等のケーブル20を介し、互いに情報送受信可能に接続されている。なお、リーダ1及びPDA30の接続は、有線ケーブルに限られず、例えばBluetooth等の無線接続でもよい。
【0043】
図2を用いて、リーダ1及びPDA30の機能的構成を説明する。
【0044】
図2において、リーダ1は、上記トリガスイッチ6と、上記複数の駆動ローラ9と、上記リーダアンテナ10と、通信制御部11と、制御回路12と、モータ駆動回路13と、搬送用モータ14と、送信回路15と、受信回路16と、アンテナ共用器17とを有している。
【0045】
通信制御部11は、PDA30との間でケーブル20を介して行われる情報通信の制御を行う。
【0046】
制御回路12は、図示しないCPU及びROM、RAM等のメモリを備えている。この制御回路12は、RAMの一時記憶機能を利用しつつ、ROMに予め記憶されたプログラムを実行することにより、リーダ1全体の動作を制御する。
【0047】
モータ駆動回路13は、搬送用モータ14を制御する。
【0048】
搬送用モータ14は、例えばパネルモータ等からなり、上記複数の駆動ローラ9を、それぞれ同期して回転駆動する。
【0049】
駆動ローラ9は、上記搬送用モータ14の駆動力に基づき、上記着脱部7の台座7aをレール8に沿って前後方向に駆動することにより、着脱部7に装着された状態のPDA30を前後進退駆動する。
【0050】
なお、これら搬送用モータ14及び駆動ローラ9が、各請求項記載の進退駆動手段として機能する。
【0051】
送信回路15及び受信回路16は、リーダアンテナ10を介し、所定の通信範囲S内に存在する、無線タグTの無線タグ回路部Toへアクセスし、情報の送受信を行う。なお、無線タグ回路部Toは、タグアンテナ151及びIC回路部150から構成される。タグアンテナ151は、情報の送受信を行う。IC回路部150は、情報を記憶する図示しないメモリ部を備えている。これら送信回路15及び受信回路16とリーダアンテナ10とは、アンテナ共用器17を介し接続されている。
【0052】
なお、上記ではアンテナ共用器17を用いて1つのリーダアンテナ10で情報の送受信を行うようにしたが、これに限られない。すなわち、送信回路15と受信回路16とに対応してリーダアンテナ10を2つ設けるようにしてもよい。
【0053】
一方、PDA30は、PDA30全体の制御を行う制御部35を有している。この制御部35には、バス32を介し、スロット通信部33、外部通信部38、操作部34、表示部36、及び記憶部37が接続されている。
【0054】
スロット通信部33は、上記スロット31に挿入されるバーコードリーダモジュール40との間で行われる情報通信の制御を行う。外部通信部38は、リーダ1との間でケーブル20を介して行われる情報通信の制御を行う。
【0055】
操作部34は、数字キーや操作ボタン等からなり、操作者により各種操作入力が行われる。
【0056】
表示部36は、例えば液晶ディスプレイ等からなり、各種表示を行う。
【0057】
記憶部37は、各種情報や各種プログラム等を記憶する。
【0058】
また、上記スロット31に挿入されたバーコードリーダモジュール40は、所定の光照射範囲L内に存在する、適宜の物品P等に設けられたバーコードBを、光学的に読み取る。なお、バーコードBには、一般的に「バーコード」と呼ばれる1次元バーコードB1の他に、例えばQRコード(登録商標)等の2次元バーコードB2も含まれる。
【0059】
以上のような基本構成において、本実施形態の最大の特徴は、バーコードリーダモジュール40による読み取りを実行するか否かを判断すること、及び、バーコードリーダモジュール40による読み取りを実行すると判断された場合には、リーダアンテナ10側の前方位置(後述)にPDA30に備えられたバーコードリーダモジュール40を駆動することにある。以下、この詳細について説明する。
【0060】
ここで、リーダ1は、上述したように、リーダアンテナ10を介し無線タグTと無線通信を行うことができる。また、これと共に、バーコードリーダモジュール40を備えたPDA30を装着して、バーコードBを読み取ることもできる。そして、このような機能を実行可能なリーダ1には、「光学読み取りモード」及び「タグ通信モード」の2つのモードが予め用意されている。
【0061】
光学読み取りモードは、バーコードリーダモジュール40によるバーコードBの読み取りを行うモードである。一方、タグ通信モードは、リーダアンテナ10による無線タグTとの間の無線通信を実行するモードである。
【0062】
また、本実施形態においては、リーダ1が備える上記光学読み取りモード及びタグ通信モードを、当該リーダ1に接続されたPDA30側での操作により選択可能とするソフトウェアが、PDA30にインストールされている。なお、当該ソフトウェアがインストールされていない場合には、適宜の操作を行うことによりインストールされるようにしてもよい。
【0063】
そして、PDA30側での操作者の操作により光学読み取りモードが選択されると、リーダ1は、光学読み取りモードに対応した、バーコードリーダモジュール40によるバーコードBの読み取りを実行すると判断する。一方、PDA30側での操作者の操作によりタグ通信モードが選択されると、リーダ1は、タグ通信モードに対応した、リーダアンテナ10による無線タグTとの無線通信を実行すると判断する。
【0064】
図3を用いて、バーコードBの読み取りを実行すると判断された場合の、リーダ1の外観を説明する。
【0065】
図3に示すように、バーコードBの読み取りを実行すると判断された場合、PDA30、詳細にはPDA30のスロット31に挿入されたバーコードリーダモジュール40は、駆動ローラ9の駆動力に基づき、上記光照射範囲Lが直線ST1よりも前方(図3中の左方)となる位置に駆動される。
【0066】
ここで、バーコードリーダモジュール40が移動する上記光照射範囲Lが直線ST1よりも前方となる位置とは、上記光照射範囲Lが本体筐体2、及び、リーダアンテナ10が設けられたアンテナ筐体3、よりも前方となる位置である。言い換えれば、本体筐体2及びアンテナ筐体3が上記光照射範囲L、すなわち光学読み取り範囲を阻害しない位置である。なお、この位置が、各請求項記載の装置アンテナ側の前方位置に相当する。
【0067】
図4を用いて、無線タグTとの無線通信を実行すると判断された場合の、リーダ1の外観を説明する。
【0068】
図4に示すように、無線タグTとの無線通信を実行すると判断された場合、PDA30、詳細にはPDA30のスロット31に挿入されたバーコードリーダモジュール40は、駆動ローラ9の駆動力に基づき、当該バーコードリーダモジュール40が直線ST2よりも後方(図4中の右方)となる位置に駆動される。なお、リーダアンテナ10の図示しない給電点のある面よりも後方にPDA30を駆動するようにしてもよい。この給電点のある面も、各請求項記載のアンテナ素子に相当する。
【0069】
ここで、バーコードリーダモジュール40が移動する上記バーコードリーダモジュール40が直線ST2よりも後方となる位置とは、リーダアンテナ10の放射指向性方向、言い換えれば、通信範囲Sが形成される方向、とは逆方向であって、放射器10aよりも後方となる位置である。なお、この位置が、各請求項記載の後方位置に相当する。
【0070】
図5を用いて、PDA30の制御部35によって実行される制御手順を説明する。
【0071】
図5において、例えば、操作者により、上記着脱部7に装着された状態、かつ、ケーブル20を介しリーダ1に接続された状態、のPDA30の電源がオンにされることによって、図中「START」位置で表されるように、このフローが開始される。
【0072】
まずステップSP5で、制御部35は、操作者により操作部34を介し上記光学読み取りモード及びタグ通信モードのどちらか一方を選択する、モード選択操作が行われたかどうかを判定する。操作者によりモード選択操作が行われるまで、判定が満たされずループ待機する。そして、操作者によりモード選択操作が行われたら、判定が満たされてステップSP10に移る。
【0073】
ステップSP10では、制御部35は、上記操作者により選択されたモードが光学読み取りモードであったかどうかを判定する。光学読み取りモードであった場合には、判定が満たされてステップSP15に移る。
【0074】
ステップSP15では、制御部35は、光学読み取りモードが選択されたモード選択信号の出力、及び、バーコードBの読み取りを行う、光学読み取り処理(詳細手順は後述の図6を参照)を実行する。その後、このフローを終了する。
【0075】
一方、上記ステップSP10において、上記操作者により選択されたモードがタグ通信モードであった場合には、ステップSP10の判定が満たされず、ステップSP20に移る。
【0076】
ステップSP20では、制御部35は、タグ通信モードが選択されたモード選択信号の出力、及び、無線タグTとの無線通信を行う、タグ通信処理(詳細手順は後述の図7を参照)を実行する。そして、このフローを終了する。
【0077】
図6を用いて、上記図5に示すステップSP15の詳細手順、及び、リーダ1の制御回路12によって実行される制御手順を、リーダ1及びPDA30の間で送受される各種信号の送受と共に説明する。なお、この図6では、基本的に図中上側から下側に向かっての時系列変化で各手順を示している。
【0078】
図6において、まずステップSP50で、PDA30の制御部35は、光学読み取りモードに対応したモード選択信号を、外部通信部33及びケーブル20を介しリーダ1に出力する。ここで、モード選択信号とは、光学読み取りモード、若しくは、タグ通信モード、のいずれか一方を選択する信号である。上記のように、操作者によりPDA30の操作部34を介し光学読み取りモードが選択された場合には、光学読み取りモードに対応したモード選択信号がリーダ1に出力される。これにより、リーダ1の制御回路12は、ステップSR5で、上記ステップSP50でPDA30より出力された、光学読み取りモードに対応したモード選択信号を、ケーブル20及び通信制御部11を介し受信する。
【0079】
そして、ステップSR7に移り、リーダ1の制御回路12は、PDA30より入力されたモード選択信号に基づき、バーコードBの読み取りを実行するか否かを判断する。具体的には、バーコードBの読み取りを実行するか、無線タグTとの無線通信を実行するかを判断する。このステップSR7では、上記ステップSR5で入力された光学読み取りモードに対応したモード選択信号に基づき、バーコードBの読み取りを実行すると判断される。
【0080】
その後、ステップSR10で、リーダ1の制御回路12は、上記ステップSR7での判断結果に基づき、予め用意された上記2つのモードのうち、光学読み取りモードを選択する。
【0081】
そして、ステップSR15に移り、リーダ1の制御回路12は、モータ駆動回路13に制御信号を出力し、搬送用モータ14を制御させる。これにより、搬送用モータ14は、モータ駆動回路13の制御に基づき、駆動ローラ9を駆動し、上記光照射範囲Lが直線ST1よりも前方となる位置に、バーコードリーダモジュール40を移動させる(図3を参照)。
【0082】
その後、ステップSR20で、リーダ1の制御回路12は、トリガスイッチ6がオンにされたか、言い換えれば、トリガスイッチ6が把持操作されたかどうかを判定する。トリガスイッチ6がオンにされるまで、判定が満たされずループ待機する。そして、トリガスイッチ6がオンにされたら、判定が満たされてステップSR25に移る。
【0083】
ステップSR25では、リーダ1の制御回路12は、バーコードリーダモジュール40によるバーコードBの読み取りを開始させる開始信号を、通信制御部11及びケーブル20を介しPDA30に出力する。これにより、PDA30の制御部35は、上記開始信号を、ケーブル20及び外部通信部33を介し受信する。
【0084】
そして、ステップSP55に移り、PDA30の制御部35は、バーコードリーダモジュール40による光照射、すなわち、バーコードBの読み取りを開始する。
【0085】
その後、ステップSP60で、PDA30の制御部35は、バーコードリーダモジュール40及びスロット通信部33を介し、バーコードBから情報を取得したかどうかを判定する。バーコードBから情報を取得するまで、判定が満たされずループ待機する。そして、バーコードBから情報を取得したら、判定が満たされてステップSP65に移る。
【0086】
ステップSP65では、PDA30の制御部35は、所定のアプリ処理を実行する。これにより、上記バーコードBから取得した情報を、表示部36に表示させると共に、記憶部37に記憶させる。なお、上記ステップSP55で開始されたバーコードBの読み取りは、後述する停止信号を受信するまで継続して実行される。そして、このステップSP65も、バーコードBから情報が読み取られるごとに実行される。
【0087】
一方、リーダ1の制御回路12は、ステップSR30で、トリガスイッチ6がオフにされたかどうかを判定する。トリガスイッチ6がオフにされるまで、判定が満たされずループ待機する。そして、トリガスイッチ6がオフにされたら、判定が満たされてステップSR35に移る。
【0088】
ステップSR35では、リーダ1の制御回路12は、バーコードBの読み取りを停止させる停止信号を、通信制御部11及びケーブル20を介しPDA30に出力する。これにより、PDA30の制御部35は、上記停止信号を、ケーブル20及び外部通信部33を介し受信する。
【0089】
そして、ステップSP70に移り、PDA30の制御部35は、バーコードリーダモジュール40による光照射、すなわち、バーコードBの読み取りを停止する。
【0090】
一方、リーダ1の制御回路12は、ステップSR40で、所定の終了操作、例えばリーダ1の電源オフ、が行われたかどうかを判定する。終了操作が行われていない場合には、判定が満たされず上記ステップSR20に戻り、同様の手順を繰り返す。終了操作が行われた場合には、判定が満たされて、このフローを終了する。
【0091】
図7を用いて、上記図5に示すステップSP20の詳細手順、及び、リーダ1の制御回路12によって実行される制御手順を、リーダ1及びPDA30の間で送受される各種信号の送受と共に説明する。なお、この図7では、基本的に図中上側から下側に向かっての時系列変化で各手順を示している。
【0092】
図7において、まずステップSP100で、PDA30の制御部35は、タグ通信モードに対応したモード選択信号を、外部通信部33及びケーブル20を介しリーダ1に出力する。これにより、リーダ1の制御回路12は、ステップSR50で、上記ステップSP100でPDA30より出力された、タグ通信モードに対応したモード選択信号を、ケーブル20及び通信制御部11を介し受信する。
【0093】
そして、ステップSR52に移り、リーダ1の制御回路12は、PDA30より受信されたモード選択信号に基づき、バーコードBの読み取りを実行するか否かを判断する。具体的には、バーコードBの読み取りを実行するか、無線タグTとの無線通信を実行するかを判断する。このステップSR52では、上記ステップSR50で受信されたタグ通信モードに対応したモード選択信号に基づき、無線タグTとの無線通信を実行すると判断される。
【0094】
その後、ステップSR55で、リーダ1の制御回路12は、上記ステップSR52での判断結果に基づき、予め用意された上記2つのモードのうち、タグ通信モードを選択する。
【0095】
そして、ステップSR60に移り、リーダ1の制御回路12は、モータ駆動回路13に制御信号を出力し、搬送用モータ14を制御させる。これにより、搬送用モータ14は、モータ駆動回路13の制御に基づき、駆動ローラ9を駆動し、上記バーコードリーダモジュール40が直線ST2よりも後方となる位置に、バーコードリーダモジュール40を移動させる(図4を参照)。
【0096】
その後、ステップSR65で、リーダ1の制御回路12は、トリガスイッチ6がオンにされたかどうかを判定する。トリガスイッチ6がオンにされるまで、判定が満たされずループ待機する。そして、トリガスイッチ6がオンにされたら、判定が満たされてステップSR70に移る。
【0097】
ステップSR70では、リーダ1の制御回路12は、上記通信範囲S内の無線タグTからの無線通信による情報の読み取りを開始する。具体的には、リーダ1の制御回路12は、無線タグTの無線タグ回路部Toに記憶された情報を読み取るためのタグ読み取り信号を、送信回路15及びリーダアンテナ10を介し通信範囲S内の無線タグ回路部Toに送信し、返信を促す。
【0098】
そして、ステップSR75に移り、リーダ1の制御回路12は、上記通信範囲S内の無線タグTから無線通信により情報を取得したかどうかを判定する。具体的には、リーダ1の制御回路12は、上記タグ読み取り信号に対応し通信範囲S内の無線タグ回路部Toから返信された応答信号を、リーダアンテナ10及び受信回路16を介し受信したかどうかを判定する。応答信号を受信するまで、判定が満たされずループ待機する。そして、応答信号を受信したら、判定が満たされて、受信した応答信号に基づき無線タグ回路部Toに記憶された情報を取得し、ステップSR80に移る。
【0099】
ステップSR80では、リーダ1の制御回路12は、上記無線タグTの無線タグ回路部Toから取得した情報を、通信制御部11及びケーブル20を介しPDA30に出力する。これにより、PDA30の制御部35は、上記無線タグTの無線タグ回路部Toから取得した情報を、ケーブル20及び外部通信部33を介し受信する。
【0100】
その後、ステップSP105で、PDA30の制御部35は、所定のアプリ処理を実行する。これにより、上記無線タグTの無線タグ回路部Toから取得した情報を、表示部36に表示させると共に、記憶部37に記憶させる。
【0101】
一方、リーダ1の制御回路12は、ステップSR85で、トリガスイッチ6がオフにされたかどうかを判定する。トリガスイッチ6がオフにされるまで、判定が満たされず上記ステップSR70に戻り、無線タグTから情報の読み取りを繰り返す。そして、トリガスイッチ6がオフにされたら、判定が満たされてステップSR90に移る。
【0102】
ステップSR90では、リーダ1の制御回路12は、上記通信範囲S内の無線タグTからの無線通信による情報の読み取りを停止する。
【0103】
そして、ステップSR95に移り、リーダ1の制御回路12は、所定の終了操作、例えばリーダ1の電源オフ、が行われたかどうかを判定する。終了操作が行われていない場合には、判定が満たされず上記ステップSR65に戻り、同様の手順を繰り返す。終了操作が行われた場合には、判定が満たされて、このフローを終了する。
【0104】
なお、上記において、図6に示すステップSR5と、図7に示すステップSR50とが、各請求項記載のモード選択信号が入力される選択信号入力手段として機能する。また、図6に示すステップSR7と、図7に示すステップSR52とが、各請求項記載の判断手段として機能する。またさらに、図6に示すステップSR15と、図7に示すステップSR60と、モータ駆動回路13とが、進退駆動手段を制御する進退制御手段として機能する。
【0105】
以上説明したように、本実施形態のリーダ1は、リーダアンテナ10により無線タグTと無線通信を行うことができる。また、これと共に、リーダ1は、PDA30を装着してバーコードBを読み取ることもできる。また、リーダ本体1Aには、PDA30を着脱可能に支持する着脱部7が備えられている。そして、この着脱部7にPDA30が装着されると、その装着された状態のPDA30は、駆動ローラ9によって前後方向に進退駆動される。
【0106】
具体的には、PDA30に備えられたバーコードリーダモジュール40によるバーコードBの読み取りを実行するか否かを判断する。そして、バーコードBの読み取りを実行すると判断された場合には、駆動ローラ9は、上記光照射範囲Lが直線ST1よりも前方となる位置に、バーコードリーダモジュール40を移動させる(図3を参照)。この移動により、リーダアンテナ10が上記光照射範囲Lを阻害しなくなる。
【0107】
以上のようにして、本実施形態においては、一般のPDA30を装着し、バーコードBの読み取りを可能としたリーダ1において、光学読み取りへの障害が生じることなく、バーコード読み取りを円滑に実行することができる。
【0108】
また、本実施形態では特に、バーコードリーダモジュール40によるバーコードBの読み取りを実行するか、リーダアンテナ10による無線タグTとの無線通信を実行するかを判断する。そして、無線タグTとの無線通信を実行すると判断された場合には、バーコードリーダモジュール30が上記直線ST2よりも後方となる位置に、当該バーコードリーダモジュール30を移動させる(図4を参照)。この移動により、バーコードリーダモジュール30が、リーダアンテナ10の放射指向性方向、言い換えれば、上記通信範囲Sが形成される方向、とは逆方向であって放射器10aよりも後方となる。これにより、リーダアンテナ10による無線通信を阻害しなくなる。この結果、電波放射への障害が生じることなく、無線通信を円滑に実行することができる。
【0109】
また、本実施形態では特に、操作者がPDA30を用いて光学読み取りモードを選択すると、当該光学読み取りモードの選択に対応したモード選択信号がリーダ1に入力される。そして、これに応じて、バーコードBの読み取りを実行すると判断され、駆動ローラ9が、上記光照射範囲Lが直線ST1よりも前方となる位置に、バーコードリーダモジュール40を移動させる。一方、操作者がPDA30を用いてタグ通信モードを選択すると、当該タグ通信モードの選択に対応したモード選択信号がリーダ1に入力される。そして、これに応じて、無線タグTとの無線通信を実行すると判断され、駆動ローラ9が、上記バーコードリーダモジュール30が上記直線ST2よりも後方となる位置に、バーコードリーダモジュール40を移動させる。以上の結果、操作者がPDA30を操作してモード選択を行うだけで、自動的にPDA30の前後方向駆動が行われ、バーコード読み取り及び無線通信を円滑に実行することができる。
【0110】
なお、本発明は、上記実施形態に限られるものではなく、その趣旨及び技術的思想を逸脱しない範囲内で種々の変形が可能である。以下、そのような変形例を順を追って説明する。
【0111】
(1)アンテナ筐体が前方側に回転する場合(その1)
すなわち、アンテナ筐体を本体筐体2の前方側に対して回転可能に構成するようにしてもよい。
【0112】
図8を用いて、本変形例のリーダの外観構成を説明する。なお、この図8は、前述の図1(a)に対応する図である。図1(a)と同等の部分には同符号を付し説明を省略する。
【0113】
図8において、本変形例の携帯型無線タグ通信装置としてのリーダ1′は、本体筐体2、アンテナ筐体3′、及び把持部5を備えたリーダ本体1Aを有している。
【0114】
本体筐体2は、上記アンテナ筐体3′を本体筐体2の前方側に対して回動駆動する回動駆動軸21を備えている。
【0115】
アンテナ筐体3′は、本体筐体2の前端部に立設されており、上記回動駆動軸21により、本体筐体2の前方側に対して回転可能に接続されている。また、アンテナ筐体3′には、複数(図示の例では5個)の駆動ローラ19を備えたレール18が設けられている。上記以外のアンテナ筐体3′の構成は、前述の図1(a)に示すアンテナ筐体3と同様である。
【0116】
レール18は、アンテナ筐体3′が上方位置(図8中の破線で示したアンテナ筐体3′の位置)に回転した際に、本体筐体2上のレール8と前後方向(図8中の左右方向)に連続するように配置されている。なお、上方位置とは、詳細は後述するが、アンテナ筐体3′が本体筐体2と前後方向に連続する位置である。
【0117】
各駆動ローラ19は、前述の各駆動ローラ9と同様、搬送用モータ14の駆動力がギヤ機構を介し伝達されることによって、それぞれ同期して回転駆動される。なお、この駆動ローラ19も、各請求項記載の進退駆動手段として機能する。すなわち、複数の駆動ローラ9,19は、それぞれ協調して台座7aをレール8,18に沿って前後方向に駆動することにより、間接的に、着脱部7に装着された状態のPDA30を前後進退駆動することができる。
【0118】
リーダ1′の上記以外の構成は、前述の図1(a)に示すリーダ1と同様である。また、PDA30及びバーコードリーダモジュール40の構成は、前述の図1(a)と同様である。
【0119】
図9を用いて、リーダ1′及びPDA30の機能的構成を説明する。なお、この図9は、前述の図2に対応する図である。図2と同等の部分には同符号を付し説明を省略する。
【0120】
図9において、リーダ1′の機能的構成で、前述の図2に示すリーダ1の機能的構成と異なる点は、アンテナ駆動用モータ22、上記回動駆動軸21、及び駆動ローラ19を備えている点である。
【0121】
アンテナ駆動用モータ22は、上記回動駆動軸21を駆動する。
【0122】
回動駆動軸21は、上記アンテナ駆動用モータ22の駆動力に基づき、アンテナ筐体3′を本体筐体2の前方側に対して回動駆動する。
【0123】
なお、これらアンテナ駆動用モータ22及び回動駆動軸21が、各請求項記載の回動駆動手段として機能する。
【0124】
また、本変形例におけるモータ駆動回路13は、搬送用モータ14を制御すると共に、上記アンテナ駆動用モータ22を制御する。また、本変形例における搬送用モータ14は、上述したように、上記複数の駆動ローラ9,19を、それぞれ同期して回転駆動する。
【0125】
リーダ1′の上記以外の機能的構成は、前述の図2に示すリーダ1と同様である。また、PDA30の機能的構成は、前述の図2と同様である。
【0126】
図10を用いて、バーコードBの読み取りを実行すると判断された場合の、リーダ1′の外観を説明する。なお、この図10は、前述の図3に対応する図である。
【0127】
図10に示すように、この場合、アンテナ筐体3′は、回動駆動軸21の駆動力に基づき、当該アンテナ筐体3′と本体筐体2とが前後方向に連続する上方位置(この図10に示す位置)に回転する。そして、PDA30のスロット31に挿入されたバーコードリーダモジュール40は、駆動ローラ9,19の駆動力に基づき、上記上方位置に回転した状態のアンテナ筐体3′上の所定位置に駆動される。具体的には、バーコードリーダモジュール40は、上記光照射範囲Lが直線ST3よりも前方となる位置に駆動される。
【0128】
ここで、バーコードリーダモジュール40が移動する上記光照射範囲Lが直線ST3よりも前方となる位置とは、上記光照射範囲Lが上記上方位置に回転した状態のアンテナ筐体3′よりも前方となる位置である。なお、この位置が、各請求項記載の前方位置に相当する。
【0129】
図11を用いて、無線タグTとの無線通信を実行すると判断された場合の、リーダ1′の外観を説明する。なお、この図11は、前述の図4に対応する図である。
【0130】
図11に示すように、この場合、PDA30のスロット31に挿入されたバーコードリーダモジュール40は、前述の図4と同様、駆動ローラ9,19の駆動力に基づき、当該バーコードリーダモジュール40が直線ST2よりも後方となる位置に駆動される。そして、アンテナ筐体3′は、回動駆動軸21の駆動力に基づき、上記上方位置から下方に下がった下方位置(この図11に示す位置)に回転する。
【0131】
図12を用いて、本変形例における、前述の図5に示すステップSP15の詳細手順、及び、リーダ1′の制御回路12によって実行される制御手順を、リーダ1′及びPDA30の間で送受される各種信号の送受と共に説明する。なお、この図12は、前述の図6に対応する図である。図6と同等の手順には同符号を付し説明を省略する。但し、この図12では、前述の図6に示すリーダ1の制御回路12が実行する制御手順を、リーダ1′の制御回路12が実行している。
【0132】
図12において、前述の図6と異なる点は、ステップSR15に代えてステップSR15′を設け、さらにステップSR10とステップSR15′との間に、ステップSR12を新たに設けた点である。すなわち、ステップSR10で、リーダ1′の制御回路12が、予め用意された上記2つのモードのうち、光学読み取りモードを選択したら、新たに設けたステップSR12に移る。
【0133】
ステップSR12では、リーダ1′の制御回路12は、モータ駆動回路13に制御信号を出力し、アンテナ搬送用モータ22を制御させる。これにより、アンテナ搬送用モータ22は、モータ駆動回路13の制御に基づき、回動駆動軸21を駆動し、上記上方位置にアンテナ筐体3′を回転させる(図10を参照)。
【0134】
そして、ステップSR15に代えて設けたステップSR15′に移り、リーダ1′の制御回路12は、モータ駆動回路13に制御信号を出力し、搬送用モータ14を制御させる。これにより、搬送用モータ14は、モータ駆動回路13の制御に基づき、駆動ローラ9,19を駆動し、上記光照射範囲Lが直線ST3よりも前方となる位置に、バーコードリーダモジュール40を移動させる(図10を参照)。
【0135】
その後のステップSR20以降は、前述の図6と同様であるので、説明を省略する。
【0136】
図13を用いて、本変形例における、前述の図5に示すステップSP20の詳細手順、及び、リーダ1′の制御回路12によって実行される制御手順を、リーダ1′及びPDA30の間で送受される各種信号の送受と共に説明する。なお、この図13は、前述の図7に対応する図である。図7と同等の手順には同符号を付し説明を省略する。但し、この図13では、前述の図7に示すリーダ1の制御回路12が実行する制御手順を、リーダ1′の制御回路12が実行している。
【0137】
図13において、前述の図7と異なる点は、ステップSR60に代えてステップSR60′を設け、さらにステップSR60′とステップSR65との間に、ステップSR62を新たに設けた点である。すなわち、ステップSR55で、リーダ1′の制御回路12が、予め用意された上記2つのモードのうち、タグ通信モードを選択したら、ステップSR60に代えてステップSR60′に移る。
【0138】
ステップSR60′では、リーダ1′の制御回路12は、モータ駆動回路13に制御信号を出力し、搬送用モータ14を制御させる。これにより、搬送用モータ14は、モータ駆動回路13の制御に基づき、駆動ローラ9,19を駆動し、上記バーコードリーダモジュール40が直線ST2よりも後方となる位置に、バーコードリーダモジュール40を移動させる(図11を参照)。
【0139】
そして、新たに設けたステップSR62に移り、リーダ1′の制御回路12は、モータ駆動回路13に制御信号を出力し、アンテナ搬送用モータ22を制御させる。これにより、アンテナ搬送用モータ22は、モータ駆動回路13の制御に基づき、回動駆動軸21を駆動し、上記下方位置にアンテナ筐体3′を回転させる(図11を参照)。
【0140】
その後のステップSR65以降は、前述の図7と同様であるので、説明を省略する。
【0141】
なお、上記において、図12に示すステップSR12と、図13に示すステップSR62と、モータ駆動回路13とが、各請求項記載の回転制御手段として機能する。また、図12に示すステップSR15′と、図13に示すステップSR60′と、モータ駆動回路13とが、進退制御手段として機能する。
【0142】
以上説明したように、本変形例のリーダ1′においては、バーコードBの読み取りを実行すると判断された場合には、回動駆動軸21は、アンテナ筐体3′を上記上方位置に回転させる。そして、駆動ローラ9,19は、上方位置に回転したアンテナ筐体3′上の、上記光照射範囲Lが直線ST3よりも前方となる位置に、バーコードリーダモジュール40を移動させる(図10を参照)。一方、無線タグTとの無線通信を実行すると判断された場合には、回動駆動軸21は、アンテナ筐体3′を上記下方位置に回転させる(図11を参照)。
【0143】
これにより、バーコードBの読み取りを行う際には、アンテナ筐体3′を上記上方位置へと回転させることで、下方のアンテナ筐体3′が邪魔になることなくなる。この結果、バーコードリーダモジュール40が、円滑に装置下方のバーコードBを読み取ることができる。また、無線通信を行う際には、アンテナ筐体3′を上記下方位置へと回転させることで、装置全体の前後方向寸法を縮小し操作性を向上することができる。
【0144】
(2)アンテナ筐体が前方側に回転する場合(その2)
上記(1)の変形例においては、バーコードBの読み取りを実行すると判断された場合には、上記上方位置に回転したアンテナ筐体3′上の、上記光照射範囲Lが直線ST3よりも前方となる位置に、バーコードリーダモジュール40を駆動していたが、これに限られない。すなわち、アンテナ筐体に開口部を設け、バーコードリーダモジュール40による照射光が上記上方位置に回転した状態のアンテナ筐体上で上記開口部を透過するような位置に、バーコードリーダモジュール40を駆動するようにしてもよい。
【0145】
図14を用いて、本変形例のリーダの外観構成を説明する。なお、図14(a)は、リーダを側方から見た外観図であり、前述の図1(a)及び図8に対応する図である。図8と同等の部分には同符号を付し説明を省略する。また、図14(b)は、図14(a)中の矢印Z方向からの矢視図である。
【0146】
図14(a)及び図14(b)において、本変形例の携帯型無線タグ通信装置としてのリーダ1″は、本体筐体2、アンテナ筐体3″、及び把持部5を備えたリーダ本体1Aを有している。
【0147】
アンテナ筐体3″は、前述の図8等に示すアンテナ筐体3′と同様、回動駆動軸21により、本体筐体2の前方側に対して回転可能に接続されている。このアンテナ筐体3″には、複数(図示の例では2個)の駆動ローラ19を備えたレール18Aが設けられている。レール18Aは、前述の図8等に示すレール18よりも、長手方向寸法が小さいことを除いては、レール18と同様である。
【0148】
また、アンテナ筐体3″は、透過部としての開口部23を備えている。開口部23は、PDA30が備えるバーコードリーダモジュール40からの照射光を透過可能な構造である。ここで、PDA30は、本変形例においても、前述の実施形態や上記(1)の変形例と同様、スロット31に挿入されるバーコードリーダモジュール40の光照射方向が下向きとなるように、着脱部7に装着されている(後述の図16も参照)。したがって、上記開口部23は、前述した上方位置に回転した状態のアンテナ筐体3″上の所定位置に駆動されたPDA30が備えるバーコードリーダモジュール40からの照射光を、アンテナ筐体3″の下方へと透過することができる。これにより、バーコードリーダモジュール40は、照射光を開口部23の下方へと透過させつつ、バーコードBの読み取りを行うことができる。
【0149】
リーダ1″の上記以外の構成は、前述の図8に示すリーダ1′と同様である。また、PDA30及びバーコードリーダモジュール40の構成は、前述の図8と同様である。
【0150】
図15を用いて、リーダ1″及びPDA30の機能的構成を説明する。なお、この図15は、前述の図2及び図9に対応する図である。図9と同等の部分には同符号を付し説明を省略する。
【0151】
図15において、リーダ1″の機能的構成で、前述の図9に示すリーダ1′の機能的構成と異なる点は、前述の図9に示すリーダ1′が駆動ローラ19を5個備えているのに対し、この図15に示すリーダ1″が駆動ローラ19を2個備えている点である。これ以外のリーダ1″の機能的構成は、前述の図9に示すリーダ1′と同様である。また、PDA30の機能的構成は、前述の図9と同様である。
【0152】
図16を用いて、バーコードBの読み取りを実行すると判断された場合の、リーダ1″の外観を説明する。なお、この図16は、前述の図3及び図10に対応する図である。
【0153】
図16に示すように、この場合、アンテナ筐体3″は、前述の図10と同様、回動駆動軸21の駆動力に基づき、前述した上方位置に回転する。そして、PDA30のスロット31に挿入されたバーコードリーダモジュール40は、駆動ローラ9,19の駆動力に基づき、上記上方位置に回転した状態のアンテナ筐体3″上の所定位置に駆動される。具体的には、バーコードリーダモジュール40は、上記上方位置に回転した状態のアンテナ筐体3″上で、上記照射光が開口部23を透過するような位置に駆動される。以下適宜、この位置を「照射光透過位置」と称する。なお、この照射光透過位置が、各請求項記載の前方位置に相当する。
【0154】
図17を用いて、無線タグTとの無線通信を実行すると判断された場合の、リーダ1″の外観を説明する。なお、この図17は、前述の図4及び図11に対応する図である。
【0155】
図17に示すように、この場合、PDA30のスロット31に挿入されたバーコードリーダモジュール40は、前述の図11と同様、駆動ローラ9,19の駆動力に基づき、当該バーコードリーダモジュール40が直線ST2よりも後方となる位置に駆動される。そして、アンテナ筐体3″は、前述の図11と同様、回動駆動軸21の駆動力に基づき、前述した下方位置に回転する。
【0156】
図18を用いて、本変形例における、前述の図5に示すステップSP15の詳細手順、及び、リーダ1″の制御回路12によって実行される制御手順を、リーダ1″及びPDA30の間で送受される各種信号の送受と共に説明する。なお、この図18は、前述の図6及び図12に対応する図である。図12と同等の手順には同符号を付し説明を省略する。但し、この図18では、前述の図12に示すリーダ1′の制御回路12が実行する制御手順を、リーダ1″の制御回路12が実行している。
【0157】
図18において、前述の図12と異なる点は、ステップSR15′に代えてステップSR15″を設けた点である。すなわち、ステップSR12で、リーダ1″の制御回路12が、上記上方位置にアンテナ筐体3″を回転させたら、ステップSR15′に代えて設けたステップSR15″に移る。
【0158】
ステップSR15″では、リーダ1″の制御回路12は、モータ駆動回路13に制御信号を出力し、搬送用モータ14を制御させる。これにより、搬送用モータ14は、モータ駆動回路13の制御に基づき、駆動ローラ9,19を駆動し、上記照射光透過位置にバーコードリーダモジュール40を移動させる(図16を参照)。なお、このステップも、各請求項記載の進退制御手段として機能する。
【0159】
その後のステップSR20以降は、前述の図12と同様であるので、説明を省略する。
【0160】
なお、本変形例における、前述の図5に示すステップSP20の詳細手順、及び、リーダ1″の制御回路12によって実行される制御手順は、前述の図13における「リーダ1′」及び「アンテナ筐体3′」の記載を、「リーダ1″」及び「アンテナ筐体3″」に置き換えたフローとほぼ同様であるので、説明を省略する。
【0161】
以上説明したように、本変形例のリーダ1″においては、アンテナ筐体3″が開口部23を備えている。これにより、バーコードリーダモジュール40は、照射光を開口部23の下方へと透過させつつ、バーコードBの読み取りを行うことができる。この結果、駆動ローラ9,19は、上記上方位置に回転した状態のアンテナ筐体3″上で、バーコードリーダモジュール40を当該アンテナ筐体3″の最前端まで駆動する必要はなくなる。また、これと共に、駆動ローラ9,19は、上記照射光透過位置(図16に示す位置)にまで、バーコードリーダモジュール40を駆動すれば足りる。このように、本変形例によれば、駆動ローラ9,19によるPDA30の前後方向駆動距離を低減することができるので、操作者の操作性を向上することができる。
【0162】
(3)トリガスイッチの把持操作に応じてモード選択する場合(その1)
前述の実施形態のリーダ1(図1乃至図4を参照)においては、PDA30側でのモード選択操作に応じて、上記光学読み取りモード又はタグ通信モードのいずれか一方を選択していたが、これに限られない。すなわち、リーダ1側のトリガスイッチ6の把持操作に応じて、上記2つのモードのいずれか一方を選択するようにしてもよい。
【0163】
本変形例では、操作者は、把持部5のトリガスイッチ6(図1参照)を、「半押し」又は「全押し」のいずれかの態様で把持操作することができる。「半押し」は、トリガスイッチ6を浅く押す態様、すなわち、トリガスイッチ6を完全に押し切らない態様である。以下適宜、「半押し」態様での把持操作を、「半押し操作」と称する。なお、この「半押し操作」が、各請求項記載の所定の態様の把持操作に相当する。一方、「全押し」は、トリガスイッチ6を深く押す態様、すなわち、トリガスイッチ6を完全に押し切る態様である。以下適宜、「全押し」態様での把持操作を、「全押し操作」と称する。
【0164】
そして、操作者によりトリガスイッチ6が「半押し操作」された場合には、リーダ1は、モードの切り替えを行い、新たなモードを選択する。そして、駆動ローラ9は、PDA30の前後方向駆動を行う。
【0165】
具体的には、現在選択中のモードがタグ通信モードである場合、すなわち前述したバーコードリーダモジュール40が直線ST2よりも後方となる位置(図4に示す位置)に、バーコードリーダモジュール40が位置していた場合には、リーダ1は、バーコードリーダモジュール40によるバーコードBの読み取りを実行すると判断する。その後、モードの切り替えを行い、新たに光学読み取りモードを選択する。そして、駆動ローラ9は、前述した光照射範囲Lが直線ST1よりも前方となる位置(図3に示す位置)に、バーコードリーダモジュール40を駆動する。
【0166】
また、現在選択中のモードが光学読み取りモードである場合、すなわち上記光照射範囲Lが直線ST1よりも前方となる位置に、バーコードリーダモジュール40が位置していた場合には、リーダ1は、リーダアンテナ10による無線タグTとの無線通信を実行すると判断する。その後、モードの切り替えを行い、新たにタグ通信モードを選択する。そして、駆動ローラ9は、上記バーコードリーダモジュール40が直線ST2よりも後方となる位置に、バーコードリーダモジュール40を駆動する。
【0167】
一方、操作者によりトリガスイッチ6が「全押し操作」された場合には、現在選択中のモードに対応した機能が実行される。
【0168】
具体的には、現在選択中のモードが光学読み取りモードである場合には、バーコードリーダモジュール40によるバーコードBの読み取りが実行される。現在選択中のモードがタグ通信モードである場合には、リーダアンテナ10による無線タグTとの無線通信が実行される。
【0169】
図19を用いて、本変形例において、リーダ1の制御回路12によって実行される制御手順を説明する。
【0170】
図19において、例えば操作者によりリーダ1の電源がオンにされることによって、図中「START」位置で表されるように、このフローが開始される。
【0171】
まずステップSR100で、制御回路12は、トリガスイッチ6がオンにされたか、言い換えれば、トリガスイッチ6が把持操作されたかどうかを判定する。トリガスイッチ6がオンにされるまで、判定が満たされずループ待機する。そして、トリガスイッチ6がオンにされたら、判定が満たされてステップSR105に移る。
【0172】
ステップSR105では、制御回路12は、上記トリガスイッチ6の把持操作が、上記「半押し操作」であったかどうかを判定する。詳細には、制御回路12は、トリガスイッチ6の把持操作に基づき取得された操作情報が、「半押し操作」に基づく操作情報であったかどうかを判定する。トリガスイッチ6の把持操作が「半押し操作」であった場合、すなわち、「半押し操作」に基づく操作情報が取得された場合には、判定が満たされてステップSR110に移る。
【0173】
ステップSR110では、制御回路12は、リーダ1において現在選択中のモードが、光学読み取りモードであるかどうかを判定する。現在選択中のモードがタグ通信モードである場合には、判定が満たされずステップSR115に移る。そして、制御回路12は、光学読み取りモード選択・実行処理(詳細手順は後述の図20参照)を実行する。その後、このフローを終了する。一方、現在選択中のモードが光学読み取りモードである場合には、判定が満たされてステップSR120に移る。そして、制御回路12は、タグ通信モード選択・実行処理(詳細手順は後述の図21参照)を実行する。その後、このフローを終了する。
【0174】
一方、上記ステップSR105において、トリガスイッチ6の把持操作が上記「全押し操作」であった場合、すなわち、「全押し操作」に基づく操作情報が取得された場合には、ステップSR105の判定が満たされず、ステップSR125に移る。
【0175】
ステップSR125では、制御回路12は、リーダ1において現在選択中のモードが、光学読み取りモードであるかどうかを判定する。現在選択中のモードが光学読み取りモードである場合には、判定が満たされて、後述の図20のステップSR25に移る。一方、現在選択中のモードがタグ通信モードである場合には、判定が満たされず、後述の図21のステップSR70に移る。
【0176】
図20を用いて、本変形例における、PDA30の制御部35によって実行される制御手順、及び、上記図19に示すステップSR115の詳細手順を、リーダ1及びPDA30の間で送受される各種信号の送受と共に説明する。なお、この図20は、前述の図6に対応する図である。図6と同等の手順には同符号を付し説明を省略する。
【0177】
図20において、前述の図6と異なる点は、ステップSP50及びステップSR5を省略し、ステップSR7及びステップSR10に代えて、ステップSR7′及びステップSR10′を設け、さらにステップSP52及びステップSR22を新たに設けた点である。
【0178】
すなわち、まずステップSR7に代えて設けたステップSR7′で、リーダ1の制御回路12は、上記図19のステップS110の判定結果に基づき、バーコードBの読み取りを実行するか、無線タグTとの無線通信を実行するかを判断する。このステップSR7′では、上記ステップS110において現在選択中のモードがタグ通信モードであると判定された、言い換えれば上記バーコードリーダモジュール40が直線ST2よりも後方となる位置にバーコードリーダモジュール40が位置している、ことに基づき、バーコードBの読み取りを実行すると判断される。
【0179】
その後、ステップSR10に代えて設けたステップSR10′で、リーダ1の制御回路12は、上記ステップSR7′での判断結果に基づき、予め用意された上記2つのモードのうち、光学読み取りモードを選択する。そして、バーコードリーダモジュール40を有効化するための制御信号を、通信制御部11及びケーブル20を介しPDA30に出力する。これにより、PDA30の制御部35は、上記制御信号を、ケーブル20及び外部通信部33を介し受信する。
【0180】
そして、PDA30の制御部35は、新たに設けたステップSP52において、バーコードリーダモジュール40を有効化する。これにより、バーコードリーダモジュール40による光照射、すなわち、バーコードBの読み取りが可能となる。
【0181】
一方、リーダ1の制御回路12が実行するステップSR15及びステップSR20は、前述の図6と同様であり、上記光照射範囲Lが直線ST1よりも前方となる位置にバーコードリーダモジュール40を移動させ、トリガスイッチ6がオンにされたら、ステップSR20の判定が満たされて、新たに設けたステップSR22に移る。
【0182】
ステップSR22では、リーダ1の制御回路12は、上記トリガスイッチ6の把持操作が、「全押し操作」であったかどうかを判定する。詳細には、リーダ1の制御回路12は、トリガスイッチ6の把持操作に基づき取得された操作情報が、「全押し操作」に基づく操作情報であったかどうかを判定する。トリガスイッチ6の把持操作が「半押し操作」であった場合、すなわち、「半押し操作」に基づく操作情報が取得された場合には、判定が満たされず、後述の図21のステップSR52′に移る。一方、トリガスイッチ6の把持操作が「全押し操作」であった場合、すなわち、「全押し操作」に基づく操作情報が取得された場合には、判定が満たされてステップSR25に移る。
【0183】
その後のステップSR25以降は、前述の図6と同様であるので、説明を省略する。
【0184】
図21を用いて、本変形例における、PDA30の制御部35によって実行される制御手順、及び、上記図19に示すステップSR120の詳細手順を、リーダ1及びPDA30の間で送受される各種信号の送受と共に説明する。なお、この図21は、前述の図7に対応する図である。図7と同等の手順には同符号を付し説明を省略する。
【0185】
図21において、前述の図7と異なる点は、ステップSP100及びステップSR50を省略し、ステップSR52及びステップSR55に代えて、ステップSR52′及びステップSR55′を設け、さらにステップSP102及びステップSR67を新たに設けた点である。
【0186】
すなわち、まずステップSR52に代えて設けたステップSR52′で、リーダ1の制御回路12は、上記図19のステップS110の判定結果に基づき、バーコードBの読み取りを実行するか、無線タグTとの無線通信を実行するかを判断する。このステップSR52′では、上記ステップS110において現在選択中のモードが光学読み取りモードであると判定された、言い換えれば上記光照射範囲Lが直線ST1よりも前方となる位置にバーコードリーダモジュール40が位置している、ことに基づき、無線タグTとの無線通信を実行すると判断される。
【0187】
その後、ステップSR55に代えてステップSR55′で、リーダ1の制御回路12は、上記ステップSR52′での判断結果に基づき、予め用意された上記2つのモードのうち、タグ読み取りモードを選択する。そして、バーコードリーダモジュール40を無効化するための制御信号を、通信制御部11及びケーブル20を介しPDA30に出力する。これにより、PDA30の制御部35は、上記制御信号を、ケーブル20及び外部通信部33を介し受信する。
【0188】
そして、PDA30の制御部35は、新たに設けたステップSP102において、バーコードリーダモジュール40を無効化する。これにより、バーコードリーダモジュール40によるバーコードBの読み取りが不可能となる。
【0189】
一方、リーダ1の制御回路12が実行するステップSR60及びステップSR65は、前述の図7と同様であり、上記バーコードリーダモジュール40が直線ST2よりも後方となる位置にバーコードリーダモジュール40を移動させ、トリガスイッチ6がオンにされたら、ステップSR65の判定が満たされて、新たに設けたステップSR67に移る。
【0190】
ステップSR67では、リーダ1の制御回路12は、上記トリガスイッチ6の把持操作が、「全押し操作」であったかどうかを判定する。詳細には、リーダ1の制御回路12は、トリガスイッチ6の把持操作に基づき取得された操作情報が、「全押し操作」に基づく操作情報であったかどうかを判定する。トリガスイッチ6の把持操作が「半押し操作」であった場合、すなわち、「半押し操作」に基づく操作情報が取得された場合には、判定が満たされず、上記図20のステップSR7′に移る。一方、トリガスイッチ6の把持操作が「全押し操作」であった場合、すなわち、「全押し操作」に基づく操作情報が取得された場合には、判定が満たされてステップSR70に移る。
【0191】
その後のステップSR70以降は、前述の図7と同様であるので、説明を省略する。
【0192】
本変形例においては、バーコードリーダモジュール40が、上記バーコードリーダモジュール40が直線ST2よりも後方となる位置(図4に示す位置)に位置している状態で、操作者がバーコードBの読み取りを意図する場合は、操作者は、トリガスイッチ6を「半押し操作」すればよい。これにより、駆動ローラ9,19が、上記バーコードリーダモジュール40が直線ST2よりも後方となる位置から、上記光照射範囲Lが直線ST1よりも前方となる位置(図3に示す位置)へとバーコードリーダモジュール40を移動させる。この結果、リーダアンテナ10がバーコードリーダモジュール40の光照射範囲Lを阻害しなくなる。
【0193】
逆に、バーコードリーダモジュール40が、上記光照射範囲Lが直線ST1よりも前方となる位置に位置している状態で、操作者が無線タグTとの通信を意図する場合も、操作者は、トリガスイッチ6を「半押し操作」すればよい。これにより、駆動ローラ9,19が、上記光照射範囲Lが直線ST1よりも前方となる位置から、上記バーコードリーダモジュール40が直線ST2よりも後方となる位置へとバーコードリーダモジュール40を移動させる。この結果、バーコードリーダモジュール40がリーダアンテナ10の無線通信を阻害しなくなる。
【0194】
本変形例によれば、前述の実施形態と同様の効果を得る。
【0195】
(4)トリガスイッチの把持操作に応じてモード選択する場合(その2)
前述の(1)の変形例のリーダ1′(図8乃至図11を参照)においては、PDA30側でのモード選択操作に応じて、上記光学読み取りモード又はタグ通信モードのいずれか一方を選択していたが、これに限られない。すなわち、リーダ1′側のトリガスイッチ6の把持操作に応じて、上記2つのモードのいずれか一方を選択するようにしてもよい。
【0196】
ここで、本変形例において、リーダ1′の制御回路12によって実行される制御手順において、前述の図19と異なる点は、ステップSR115及びステップSR120であり、その他の手順は図19の各手順と同様である。但し、本変形例では、前述の図19に示すリーダ1の制御回路12が実行する制御手順を、リーダ1′の制御回路12が実行している。
【0197】
また、本変形例におけるステップSR115の詳細手順において、前述の図20と異なる点は、ステップSR15に代えてステップSR15′を設け、さらにステップSR10′と上記ステップSR15′との間に前述の図12に示すステップSR12を新たに設けた点である。これ以外は、前述の図20と同様であるので説明を省略する。但し、本変形例におけるステップSR115の詳細手順は、リーダ1′の制御回路12が実行している。
【0198】
また、本変形例におけるステップSR120の詳細手順において、前述の図21と異なる点は、ステップSR60に代えてステップSR60′を設け、さらに当該ステップSR60′とステップS65との間に図13に示すステップSR62を新たに設けた点である。これ以外は、前述の図21と同様であるので説明を省略する。但し、本変形例におけるステップSR115の詳細手順は、リーダ1′の制御回路12が実行している。
【0199】
本変形例においては、バーコードリーダモジュール40が、上記バーコードリーダモジュール40が直線ST2よりも後方となる位置(図11に示す位置)に位置している状態で、操作者がバーコードBの読み取りを意図する場合は、操作者は、トリガスイッチ6を半押し操作すればよい。これにより、回動駆動軸21が、前述した下方位置から前述した上方位置へとアンテナ筐体3′を回転させる(図10を参照)。そして、駆動ローラ9,19が、上記バーコードリーダモジュール40が直線ST2よりも後方となる位置から、上記光照射範囲Lが直線ST3よりも前方となる位置(図10に示す位置)へとバーコードリーダモジュール40を移動させる。この結果、リーダアンテナ10がバーコードリーダモジュール40の光照射範囲Lを阻害しなくなる。
【0200】
逆に、バーコードリーダモジュール40が、上記光照射範囲Lが直線ST3よりも前方となる位置に位置している状態で、操作者が無線タグTとの通信を意図する場合も、操作者は、トリガスイッチ6を半押し操作すればよい。これにより、駆動ローラ9,19が、上記光照射範囲Lが直線ST3よりも前方となる位置から、上記バーコードリーダモジュール40が直線ST2よりも後方となる位置へとバーコードリーダモジュール40を移動させる。そして、回動駆動軸21が、前述した上方位置から前述した下方位置へとアンテナ筐体3′を回転させる(図11を参照)。この結果、バーコードリーダモジュール40がリーダアンテナ10の無線通信を阻害しなくなる。
【0201】
このようにして、本変形例によれば、操作者がトリガスイッチ6において半押し操作を行うだけで、自動的にPDA30の前後方向駆動が行われ、バーコード読み取り及び無線通信を円滑に実行することができる。
【0202】
なお、特に説明はしないが、前述の(2)の変形例のリーダ1″についても同様に、リーダ1″側のトリガスイッチ6の把持操作に応じて、上記2つのモードのいずれか一方を選択するようにしてもよい。
【0203】
(5)バーコードリーダモジュールの光照射方向が前向きである場合
以上においては、PDA30のスロット31に挿入されたバーコードリーダモジュール40の光照射方向が下向きとなる場合を例にとって説明したが、これに限られない。すなわち、光照射方向が前向きとなってもよい。
【0204】
図22を用いて、本変形例におけるバーコードリーダモジュールが備えられたPDA30を装着したリーダ1の外観構成を説明する。なお、この図22は、前述したバーコードBの読み取りを実行すると判断された場合の状態を示しており、前述の図1に対応する図である。図1と同等の部分には同符号を付し説明を省略する。
【0205】
図22において、PDA30が備えるスロット31には、光学読み取り手段としてのバーコードリーダモジュール40′が挿入されている。バーコードリーダモジュール40′は、前述の図1等に示すバーコードリーダモジュール40と同様、バーコードBを光学的に読み取ることができる。
【0206】
そして、PDA30は、上記バーコードリーダモジュール40′の光学読み取り方向、すなわち光照射方向が前向きとなるように、着脱部7に装着されている。言い換えれば、PDA30は、上記バーコードリーダモジュール40′による光学読み取り範囲、すなわち光照射範囲L′が前方向(図22中の左方向)に形成されるように、着脱部7に装着されている。
【0207】
本変形例によれば、上記実施形態と同様の効果を得る。さらに、バーコードリーダモジュール40′がバーコードBの読み取りを実行する際には、光照射方向が前向きであるので、下方のアンテナ筐体3が邪魔になることはない。したがって、バーコードBの読み取りが実行しやすい位置までPDA30を駆動すればよく、操作性を向上することができる。
【0208】
(6)その他
以上においては、携帯情報端末としてPDA30を用いた場合を例にとって説明したが、これに限られず、例えば携帯電話などを用いてもよい。
【0209】
図23を用いて、本変形例における携帯情報端末である携帯電話の外観構成を説明する。なお、図23(a)は、携帯電話を正面から見た外観図であり、図23(b)は、携帯電話を背面から見た外観図である。
【0210】
図23(a)及び図23(b)において、本変形例における携帯情報端末としての携帯電話400は、電話機能、ネットワーク機能、例えばBluetooth等の近距離通信機能、及び画像撮影機能等を備えている。この携帯電話400は、携帯アンテナ(図示せず)、光学読み取り手段としてのカメラ403、表示部404、及び操作キー405等を有している。
【0211】
カメラ403は、いわゆるデジタルカメラ機能やバーコードBの読み取り機能等を備えている。なお、上記カメラ403に代えて、携帯電話400が備えるスロット(図示せず)にSDメモリカード型のバーコードリーダモジュールを挿入して、当該バーコードリーダモジュールによりバーコードBを読み取るようにしてもよい。この場合、スロットに挿入されたバーコードリーダモジュールが、光学読み取り手段として機能する。
【0212】
上記のような構成である携帯電話400を用いた場合でも、前述の実施形態や各変形例と同様の効果を得る。
【0213】
なお、以上において、図2、図9、図15の各図中に示す矢印は信号の流れの一例を示すものであり、信号の流れ方向を限定するものではない。
【0214】
また、図5、図6、図7等に示すフローチャートは本発明を上記フローに示す手順に限定するものではなく、発明の趣旨及び技術的思想を逸脱しない範囲内で手順の追加・削除又は順番の変更等をしてもよい。
【0215】
また、以上既に述べた以外にも、上記実施形態や各変形例による手法を適宜組み合わせて利用しても良い。
【0216】
その他、一々例示はしないが、本発明は、その趣旨を逸脱しない範囲内において、種々の変更が加えられて実施されるものである。
【符号の説明】
【0217】
1 リーダ(携帯型無線タグ通信装置)
1′ リーダ(携帯型無線タグ通信装置)
1″ リーダ(携帯型無線タグ通信装置)
1A リーダ本体
2 本体筐体
3 アンテナ筐体
3′ アンテナ筐体
3″ アンテナ筐体
5 把持部
6 トリガスイッチ
7 着脱部
9 駆動ローラ
10 リーダアンテナ(装置アンテナ)
10a 放射器(アンテナ素子)
10b 反射器(アンテナ素子)
13 モータ駆動回路
14 搬送用モータ
19 駆動ローラ
21 回動駆動軸
22 アンテナ駆動用モータ
23 開口部(透過部)
30 PDA(携帯情報端末)
40 バーコードリーダモジュール(光学読み取り手段)
40′ バーコードリーダモジュール(光学読み取り手段)
400 携帯電話(携帯情報端末)
403 カメラ(光学読み取り手段)
B バーコード
L 光照射範囲
L′ 光照射範囲
S 通信範囲
T 無線タグ
【技術分野】
【0001】
本発明は、無線タグに対して無線通信を行う、携帯型無線タグ通信装置に関する。
【背景技術】
【0002】
従来、無線通信機能に加え、光学読み取り機能を設けた携帯型無線タグ通信装置が、例えば特許文献1に開示されている。この従来技術の携帯型情報読取装置は、光学読み取り手段としての光学コード読取部と、RFタグ処理部とを有している。光学コード読み取り部は、バーコード等の光学情報を読み取る。RFタグ処理部は、装置アンテナを用いて無線タグとの間で通信を行う。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−183732号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来技術のように光学読み取り機能と無線通信機能とを備えている場合でも、両機能が同時に使用されることはなく、いずれか一方の機能が選択的に使用される。したがって、例えば光学読み取りの際には、無線通信に係わる構成が当該読み取りのための光照射を阻害しないように配慮される。上記従来技術では、ユーザが把持する把持部としてのグリップ部の上部に水平に配置された本体の先端に、光学読み取りを行うための読取口が設けられている。その一方で、水平な本体の先端部よりやや後方側の下部に、装置アンテナが鉛直方向に設けられている。これにより、本体の先端部の読取口をバーコード等に接して光学読み取りが行われる際に、装置アンテナがユーザの操作の邪魔にならずまた光照射を阻害しない。
【0005】
一方、近年、光学読み取り機能を備えた携帯情報端末が、多くのユーザに広く普及している。そこで、携帯型無線タグ通信装置に対し、既にユーザが所有している上記携帯情報端末を装着可能とすることで、当該携帯情報端末の光学読み取り機能を活用することが考えられつつある。この携帯型無線タグ通信装置では、装着した携帯情報端末の光学読み取り機能を活用することで、上記従来技術と同様、無線通信機能と光学読み取り機能との両機能が実現される。しかしながら、このような携帯情報端末を装着可能とした携帯型無線タグ通信装置において、前述のように、光照射への障害が生じないようにする構成は、従来存在しなかった。なお、光学読み取りとして、上記光照射以外にもCCDカメラ等による露光を行う場合もある。この場合も上記と同様の課題があった。
【0006】
本発明の目的は、一般の携帯情報端末を装着しバーコード読み取りを可能とした携帯型無線タグ通信装置において、光学読み取りへの障害が生じることなく、バーコード読み取りを円滑に実行することができる構成を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、第1の発明は、バーコードを光学的に読み取り可能な光学読み取り手段が備えられた携帯情報端末を着脱可能に支持する着脱部、及び、無線タグに対し無線通信を行うための装置アンテナ、を備えたリーダ本体と、前記着脱部に装着された状態の前記携帯情報端末を前後進退駆動する進退駆動手段と、前記光学読み取り手段による読み取りを実行するか否かを判断する判断手段と、前記判断手段により前記光学読み取り手段による読み取りを実行すると判断された場合には、前記装置アンテナ側の前方位置に前記携帯情報端末に備えられた前記光学読み取り手段を駆動するように、前記進退駆動手段を制御する進退制御手段とを有することを特徴とする。
【0008】
本願第1発明においては、装置アンテナにより無線タグと無線通信を行うことができると共に、携帯情報端末を装着してバーコードを読み取ることができる。リーダ本体には着脱部が備えられており、この着脱部が携帯情報端末を着脱可能に支持する。着脱部に携帯情報端末が装着されると、その装着された状態の携帯情報端末は、進退駆動手段によって前後方向に進退駆動される。その進退駆動手段による進退駆動を、判断手段による判断結果に応じて、進退制御手段が制御する。
【0009】
具体的には、判断手段が光学読み取り手段による読み取りを実行するか否かを判断する。そして、判断手段が光学読み取り手段によるバーコードの読み取りを実行すると判断した場合には、進退駆動手段は、携帯情報端末に備えられた光学読み取り手段を前方位置に駆動する。この携帯情報端末の光学読み取り手段の前方位置への移動により、装置アンテナが光学読み取り手段による光学読み取り範囲を阻害しなくなる。
【0010】
以上のようにして、本願第1発明においては、一般の携帯情報端末を装着し、バーコード読み取りを可能とした携帯型無線タグ通信装置において、光学読み取りへの障害が生じることなく、バーコード読み取りを円滑に実行することができる。
【0011】
第2の発明は、上記第1発明において、前記判断手段は、前記光学読み取り手段による読み取りを実行するか前記装置アンテナによる無線通信を実行するかを判断し、前記進退制御手段は、前記判断手段により前記装置アンテナによる無線通信を実行すると判断された場合には、前記光学読み取り手段が前記装置アンテナの放射指向性方向とは逆方向であって当該装置アンテナのアンテナ素子よりも後方となる後方位置に前記携帯情報端末に備えられた前記光学読み取り手段を駆動するように、前記進退駆動手段を制御することを特徴とする。
【0012】
本願第2発明においては、判断手段が光学読み取り手段による読み取りを実行するか装置アンテナによる無線通信を実行するかを判断する。そして、判断手段が装置アンテナによる無線タグとの無線通信を実行すると判断した場合には、進退駆動手段は、携帯情報端末に備えられた前記光学読み取り手段を後方位置に駆動する。この携帯情報端末の光学読み取り手段の後方位置への移動により、光学読み取り手段が装置アンテナの放射指向性方向とは逆方向であって当該装置アンテナのアンテナ素子よりも後方となり、無線通信を阻害しなくなる。これにより、電波放射への障害が生じることなく、無線通信を円滑に実行することができる。
【0013】
第3の発明は、上記第2発明において、前記リーダ本体は、前記着脱部が設けられた本体筐体と、前記本体筐体の前方側に対して回転可能に接続され、前記装置アンテナが設けられたアンテナ筐体と、前記アンテナ筐体を前記本体筐体に対し回動駆動する回動駆動手段とを備えており、かつ、前記判断手段により前記光学読み取り手段による読み取りを実行すると判断された場合には、前記アンテナ筐体と前記本体筐体とが前後方向に連続する上方位置に前記アンテナ筐体を回転させ、前記判断手段により前記装置アンテナによる無線通信を実行すると判断された場合には、前記上方位置から下方に下がった下方位置に前記アンテナ筐体を回転させるように、前記回動駆動手段を制御する回転制御手段を設け、前記進退制御手段は、前記判断手段により前記光学読み取り手段による読み取りを実行すると判断された場合には、前記上方位置に回転した状態の前記アンテナ筐体上の前記前方位置に前記携帯情報端末に備えられた前記光学読み取り手段を駆動するように、前記進退駆動手段を制御することを特徴とする。
【0014】
本願第3発明においては、判断手段が光学読み取り手段によるバーコードの読み取りを実行すると判断した場合には、回転制御手段の制御により上方位置にアンテナ筐体が回転し、進退制御手段の制御により当該上方位置に回転したアンテナ筐体上の前方位置に携帯情報端末の光学読み取り手段が移動する。一方、判断手段が装置アンテナによる無線通信を実行すると判断した場合には、回転制御手段の制御により下方位置にアンテナ筐体が回転する。
【0015】
これにより、光学読み取り手段による読み取りを行う際には、アンテナ筐体を上方位置へと回転させることで、下方のアンテナが邪魔になることなく円滑に光学読み取り手段が装置下方のバーコードを読み取ることができる。また、装置アンテナによる無線タグとの無線通信を行う際には、アンテナ筐体を下方位置へと回転させることで、装置全体の前後方向寸法を縮小し操作性を向上することができる。
【0016】
第4発明は、上記第3発明において、前記リーダ本体の前記着脱部は、前記光学読み取り手段の光学読み取り方向が下向きとなるように前記携帯情報端末を装着し、前記アンテナ筐体は、前記前方位置に駆動された前記携帯情報端末の前記光学読み取り手段からの照射光を透過させるための透過部を備えており、前記進退制御手段は、前記判断手段により前記光学読み取り手段による読み取りを実行すると判断された場合には、前記上方位置に回転した状態の前記アンテナ筐体上で前記照射光が前記透過部を透過するような前記前方位置に前記携帯情報端末に備えられた前記光学読み取り手段を駆動するように、前記進退駆動手段を制御することを特徴とする。
【0017】
本願第4発明においては、アンテナ筐体が透過部を備えており、光学読み取り手段は、照射光を当該透過部の下方へと透過させつつ、バーコードの読み取りを行うことができる。この結果、進退駆動手段は、上方位置に回転した状態のアンテナ筐体上で携帯情報端末の光学読み取り手段をアンテナ筐体の最前端まで駆動する必要はなく、照射光が透過部を透過するような前方位置にまで携帯情報端末の光学読み取り手段を駆動すれば足りる。このように、進退駆動手段による携帯情報端末の前後方向駆動距離を低減することができるので、操作者の操作性を向上することができる。
【0018】
第5発明は、上記第1乃至第4発明のいずれかにおいて、前記携帯情報端末より出力された、前記光学読み取り手段による前記バーコードの読み取りを行う光学読み取りモード、若しくは、前記装置アンテナによる前記無線通信を実行するタグ通信モード、のいずれか一方を選択する、モード選択信号が入力される選択信号入力手段を有し、前記判断手段は、前記選択信号入力手段により、前記光学読み取りモードが選択された前記モード選択信号が入力された場合には、前記光学読み取り手段による読み取りを実行すると判断し、前記タグ通信モードが選択された前記モード選択信号が入力された場合には、前記装置アンテナによる無線通信を実行すると判断し、前記進退駆動手段は、前記判断手段により前記光学読み取り手段による読み取りを実行すると判断された場合には、前記前方位置に前記携帯情報端末に備えられた前記光学読み取り手段を駆動し、前記判断手段により前記装置アンテナによる無線通信を実行すると判断された場合には、前記後方位置に前記携帯情報端末に備えられた前記光学読み取り手段を駆動するように、前記進退駆動手段を制御することを特徴とする。
【0019】
本願第5発明においては、操作者が携帯情報端末において光学読み取りモードを選択すると、選択信号入力手段が、当該光学読み取りモードの選択に対応したモード選択信号を入力する。これに応じて、判断手段が光学読み取り手段による読み取りを実行すると判断し、進退駆動手段が前方位置に携帯情報端末の光学読み取り手段を駆動するので、装置アンテナが光学読み取り手段の光学読み取り範囲を阻害しなくなる。
【0020】
操作者が携帯情報端末においてタグ通信モードを選択すると、選択信号入力手段が、当該タグ通信モードの選択に対応したモード選択信号を入力する。これに応じて、判断手段が装置アンテナによる無線通信を実行すると判断し、進退駆動手段が後方位置に携帯情報端末の光学読み取り手段を駆動するので、光学読み取り手段が装置アンテナの無線通信を阻害しなくなる。
【0021】
以上のようにして、本願第5発明においては、操作者が携帯情報端末を操作してモード選択を行うだけで、自動的に携帯情報端末の前後方向駆動が行われ、バーコード読み取り及び無線通信を円滑に実行することができる。
【0022】
第6発明は、上記第3又は第4発明において、前記リーダ本体は、前記本体筐体の下部に位置し、操作者が把持操作可能な把持部を備えており、前記判断手段は、前記把持部の所定の態様の把持操作に基づく操作情報が取得されたら、前記後方位置に前記携帯情報端末に備えられた前記光学読み取り手段が位置していた場合には前記光学読み取り手段による読み取りを実行すると判断し、前記前方位置に前記携帯情報端末に備えられた前記光学読み取り手段が位置していた場合には前記装置アンテナによる無線通信を実行すると判断し、前記進退駆動手段は、前記判断手段により前記光学読み取り手段による読み取りを実行すると判断された場合には、前記携帯情報端末に備えられた前記光学読み取り手段を前記前方位置へと駆動し、前記判断手段により前記装置アンテナによる無線通信を実行すると判断された場合には、前記携帯情報端末に備えられた前記光学読み取り手段を前記後方位置へと駆動するように、前記進退駆動手段を制御することを特徴とする。
【0023】
本願第6発明においては、携帯情報端末の光学読み取り手段が後方位置に位置している状態で、操作者がバーコードの読み取りを意図する場合は、操作者は、把持部を所定の態様で把持操作すればよい。これにより、判断手段が光学読み取り手段による読み取りを実行すると判断し、進退駆動手段が後方位置から前方位置へと携帯情報端末の光学読み取り手段を駆動するので、装置アンテナが光学読み取り手段の光学読み取り範囲を阻害しなくなる。
【0024】
逆に、携帯情報端末の光学読み取り手段が前方位置に位置している状態で、操作者がタグとの通信を意図する場合も、操作者は、把持部を所定の態様で把持操作すればよい。これにより、判断手段が装置アンテナによる無線通信を実行すると判断し、進退駆動手段が前方位置から後方位置へと携帯情報端末の光学読み取り手段を駆動するので、光学読み取り手段が装置アンテナの無線通信を阻害しなくなる。
【0025】
このようにして、本願第6発明においては、操作者が把持部において所定の態様で把持操作を行うだけで、自動的に携帯情報端末の前後方向駆動が行われ、バーコード読み取り及び無線通信を円滑に実行することができる。
【発明の効果】
【0026】
本発明によれば、一般の携帯情報端末を装着し、バーコード読み取りを可能とした携帯型無線タグ通信装置において、光学読み取りへの障害が生じることなく、バーコード読み取りを円滑に実行することができる。
【図面の簡単な説明】
【0027】
【図1】本発明の一実施形態の携帯型無線タグ通信装置の外観構成を表す説明図である。
【図2】リーダ及びPDAの機能的構成を表すブロック図である。
【図3】バーコードの読み取りを実行すると判断された場合の、リーダの外観図である。
【図4】無線タグとの無線通信を実行すると判断された場合の、リーダの外観図である。
【図5】PDAの制御部によって実行される制御手順を表すフローチャートである。
【図6】ステップSP15の詳細手順、及び、リーダの制御回路によって実行される制御手順を、リーダ及びPDAの間で送受される各種信号の送受と共に表すシーケンス図である。
【図7】ステップSP20の詳細手順、及び、リーダの制御回路によって実行される制御手順を、リーダ及びPDAの間で送受される各種信号の送受と共に表すシーケンス図である。
【図8】アンテナ筐体が前方側に回転する変形例において、リーダの外観構成を表す説明図である。
【図9】リーダ及びPDAの機能的構成を表すブロック図である。
【図10】バーコードの読み取りを実行すると判断された場合の、リーダの外観図である。
【図11】無線タグとの無線通信を実行すると判断された場合の、リーダの外観図である。
【図12】ステップSP15の詳細手順、及び、リーダの制御回路によって実行される制御手順を、リーダ及びPDAの間で送受される各種信号の送受と共に表すシーケンス図である。
【図13】ステップSP20の詳細手順、及び、リーダの制御回路によって実行される制御手順を、リーダ及びPDAの間で送受される各種信号の送受と共に表すシーケンス図である。
【図14】アンテナ筐体が前方側に回転する変形例において、リーダの外観構成を表す説明図である。
【図15】リーダ及びPDAの機能的構成を表すブロック図である。
【図16】バーコードの読み取りを実行すると判断された場合の、リーダの外観図である。
【図17】無線タグとの無線通信を実行すると判断された場合の、リーダの外観図である。
【図18】ステップSP15の詳細手順、及び、リーダの制御回路によって実行される制御手順を、リーダ及びPDAの間で送受される各種信号の送受と共に表すシーケンス図である。
【図19】トリガスイッチの把持操作に応じてモード選択する変形例において、リーダの制御回路によって実行される制御手順を表すフローチャートである。
【図20】PDAの制御部によって実行される制御手順、及び、ステップSR115の詳細手順を、リーダ及びPDAの間で送受される各種信号の送受と共に表すシーケンス図である。
【図21】PDAの制御部によって実行される制御手順、及び、ステップSR120の詳細手順を、リーダ及びPDAの間で送受される各種信号の送受と共に表すシーケンス図である。
【図22】バーコードリーダモジュールの光照射方向が前向きである変形例において、リーダの外観構成を表す説明図である。
【図23】携帯情報端末として携帯電話を用いる変形例において、携帯電話の外観構成を表す説明図である。
【発明を実施するための形態】
【0028】
以下、本発明の一実施の形態を図面を参照しつつ説明する。
【0029】
図1を用いて、本実施形態の携帯型無線タグ通信装置であるリーダの外観構成を説明する。なお、図1(a)は、リーダを側方から見た外観図であり、図1(b)は、リーダを上方から見た外観図である。
【0030】
図1(a)及び図1(b)において、本実施形態の携帯型無線タグ通信装置としてのリーダ1は、操作者が把持操作可能な把持部5を備えた、いわゆるガンタイプである。このリーダ1は、本体筐体2、アンテナ筐体3、及び把持部5を備えたリーダ本体1Aを有している。
【0031】
本体筐体2の上辺には、前後方向(図1(a)及び図1(b)中の左右方向)に沿って、複数(図示の例では8個)の駆動ローラ9を備えたレール8が設けられている。
【0032】
各駆動ローラ9は、搬送用モータ14(後述の図2参照)の駆動力が図示しないギヤ機構を介し伝達されることによって、それぞれ同期して回転駆動される。
【0033】
また、本体筐体2の上部には、着脱部7が設けられている。着脱部7は、携帯情報端末としてのPersonal Digital Assistant(以下「PDA」と称する)30を着脱可能に支持する。この着脱部7は、設置用の台座7a及び固定用の固定部材(図示せず)より構成されている。
【0034】
着脱部7の台座7aは、上記レール8の間に配置されている。したがって、台座7aは、上記複数の駆動ローラ9が回転駆動されることにより、レール8に沿って前後方向に駆動される。これにより、上記着脱部7に装着された状態のPDA30は、台座7aの移動に伴い、同様に駆動される。
【0035】
すなわち、上記複数の駆動ローラ9は、それぞれ協調して台座7aをレール8に沿って前後方向に駆動することにより、間接的に、着脱部7に装着された状態のPDA30を前後進退駆動することができる。
【0036】
アンテナ筐体3は、上記本体筐体2の前端部(図1(a)中の左端部)に、当該本体筐体2に対し略垂直となるように立設されている。このアンテナ筐体3には、装置アンテナとしてのリーダアンテナ10が設けられている。
【0037】
リーダアンテナ10は、無線タグT(後述の図2参照)に対し無線通信を行う。このリーダアンテナ10は、周知の放射器10a及び反射器10b等から構成されている。なお、これら放射器10a及び反射器10b等が、各請求項記載のアンテナ素子に相当する。
【0038】
把持部5は、上記本体筐体2の後方下部(図1(a)中の右方下部)に設けられている。この把持部5は、トリガスイッチ6を備えている。トリガスイッチ6は、後述するバーコード読み取り、若しくは、無線通信、の開始又は停止を指示するために用いられる。
【0039】
一方、上記着脱部7に装着される上記PDA30は、その前端部(図1(a)中の左端部)に、例えば周知のSDメモリカード等を挿抜可能なスロット31を備えている。このスロット31には、SDメモリカード型のバーコードリーダモジュール40が挿入されている。したがって、上記のようにしてPDA30が前後方向に移動することに伴い、このバーコードリーダモジュール40も前後方向に移動する。
【0040】
バーコードリーダモジュール40は、光学読み取り手段として機能し、バーコードB(後述の図2参照)を光学的に読み取ることができる。なお、PDA30自身が光学読み取り手段を備えていてもよい。
【0041】
本実施形態においては、PDA30は、スロット31に挿入されるバーコードリーダモジュール40の光学読み取り方向、すなわち光照射方向が下向きとなるように、着脱部7に装着されている。言い換えれば、PDA30は、スロット31に挿入されるバーコードリーダモジュール40による光学読み取り範囲、すなわち光照射範囲L(後述の図2及び図3参照)が下方向(後述の図3中の下方向)に形成されるように、着脱部7に装着されている。
【0042】
また、リーダ1及びPDA30は、例えばUniversal Serial Bus(USB)ケーブル等のケーブル20を介し、互いに情報送受信可能に接続されている。なお、リーダ1及びPDA30の接続は、有線ケーブルに限られず、例えばBluetooth等の無線接続でもよい。
【0043】
図2を用いて、リーダ1及びPDA30の機能的構成を説明する。
【0044】
図2において、リーダ1は、上記トリガスイッチ6と、上記複数の駆動ローラ9と、上記リーダアンテナ10と、通信制御部11と、制御回路12と、モータ駆動回路13と、搬送用モータ14と、送信回路15と、受信回路16と、アンテナ共用器17とを有している。
【0045】
通信制御部11は、PDA30との間でケーブル20を介して行われる情報通信の制御を行う。
【0046】
制御回路12は、図示しないCPU及びROM、RAM等のメモリを備えている。この制御回路12は、RAMの一時記憶機能を利用しつつ、ROMに予め記憶されたプログラムを実行することにより、リーダ1全体の動作を制御する。
【0047】
モータ駆動回路13は、搬送用モータ14を制御する。
【0048】
搬送用モータ14は、例えばパネルモータ等からなり、上記複数の駆動ローラ9を、それぞれ同期して回転駆動する。
【0049】
駆動ローラ9は、上記搬送用モータ14の駆動力に基づき、上記着脱部7の台座7aをレール8に沿って前後方向に駆動することにより、着脱部7に装着された状態のPDA30を前後進退駆動する。
【0050】
なお、これら搬送用モータ14及び駆動ローラ9が、各請求項記載の進退駆動手段として機能する。
【0051】
送信回路15及び受信回路16は、リーダアンテナ10を介し、所定の通信範囲S内に存在する、無線タグTの無線タグ回路部Toへアクセスし、情報の送受信を行う。なお、無線タグ回路部Toは、タグアンテナ151及びIC回路部150から構成される。タグアンテナ151は、情報の送受信を行う。IC回路部150は、情報を記憶する図示しないメモリ部を備えている。これら送信回路15及び受信回路16とリーダアンテナ10とは、アンテナ共用器17を介し接続されている。
【0052】
なお、上記ではアンテナ共用器17を用いて1つのリーダアンテナ10で情報の送受信を行うようにしたが、これに限られない。すなわち、送信回路15と受信回路16とに対応してリーダアンテナ10を2つ設けるようにしてもよい。
【0053】
一方、PDA30は、PDA30全体の制御を行う制御部35を有している。この制御部35には、バス32を介し、スロット通信部33、外部通信部38、操作部34、表示部36、及び記憶部37が接続されている。
【0054】
スロット通信部33は、上記スロット31に挿入されるバーコードリーダモジュール40との間で行われる情報通信の制御を行う。外部通信部38は、リーダ1との間でケーブル20を介して行われる情報通信の制御を行う。
【0055】
操作部34は、数字キーや操作ボタン等からなり、操作者により各種操作入力が行われる。
【0056】
表示部36は、例えば液晶ディスプレイ等からなり、各種表示を行う。
【0057】
記憶部37は、各種情報や各種プログラム等を記憶する。
【0058】
また、上記スロット31に挿入されたバーコードリーダモジュール40は、所定の光照射範囲L内に存在する、適宜の物品P等に設けられたバーコードBを、光学的に読み取る。なお、バーコードBには、一般的に「バーコード」と呼ばれる1次元バーコードB1の他に、例えばQRコード(登録商標)等の2次元バーコードB2も含まれる。
【0059】
以上のような基本構成において、本実施形態の最大の特徴は、バーコードリーダモジュール40による読み取りを実行するか否かを判断すること、及び、バーコードリーダモジュール40による読み取りを実行すると判断された場合には、リーダアンテナ10側の前方位置(後述)にPDA30に備えられたバーコードリーダモジュール40を駆動することにある。以下、この詳細について説明する。
【0060】
ここで、リーダ1は、上述したように、リーダアンテナ10を介し無線タグTと無線通信を行うことができる。また、これと共に、バーコードリーダモジュール40を備えたPDA30を装着して、バーコードBを読み取ることもできる。そして、このような機能を実行可能なリーダ1には、「光学読み取りモード」及び「タグ通信モード」の2つのモードが予め用意されている。
【0061】
光学読み取りモードは、バーコードリーダモジュール40によるバーコードBの読み取りを行うモードである。一方、タグ通信モードは、リーダアンテナ10による無線タグTとの間の無線通信を実行するモードである。
【0062】
また、本実施形態においては、リーダ1が備える上記光学読み取りモード及びタグ通信モードを、当該リーダ1に接続されたPDA30側での操作により選択可能とするソフトウェアが、PDA30にインストールされている。なお、当該ソフトウェアがインストールされていない場合には、適宜の操作を行うことによりインストールされるようにしてもよい。
【0063】
そして、PDA30側での操作者の操作により光学読み取りモードが選択されると、リーダ1は、光学読み取りモードに対応した、バーコードリーダモジュール40によるバーコードBの読み取りを実行すると判断する。一方、PDA30側での操作者の操作によりタグ通信モードが選択されると、リーダ1は、タグ通信モードに対応した、リーダアンテナ10による無線タグTとの無線通信を実行すると判断する。
【0064】
図3を用いて、バーコードBの読み取りを実行すると判断された場合の、リーダ1の外観を説明する。
【0065】
図3に示すように、バーコードBの読み取りを実行すると判断された場合、PDA30、詳細にはPDA30のスロット31に挿入されたバーコードリーダモジュール40は、駆動ローラ9の駆動力に基づき、上記光照射範囲Lが直線ST1よりも前方(図3中の左方)となる位置に駆動される。
【0066】
ここで、バーコードリーダモジュール40が移動する上記光照射範囲Lが直線ST1よりも前方となる位置とは、上記光照射範囲Lが本体筐体2、及び、リーダアンテナ10が設けられたアンテナ筐体3、よりも前方となる位置である。言い換えれば、本体筐体2及びアンテナ筐体3が上記光照射範囲L、すなわち光学読み取り範囲を阻害しない位置である。なお、この位置が、各請求項記載の装置アンテナ側の前方位置に相当する。
【0067】
図4を用いて、無線タグTとの無線通信を実行すると判断された場合の、リーダ1の外観を説明する。
【0068】
図4に示すように、無線タグTとの無線通信を実行すると判断された場合、PDA30、詳細にはPDA30のスロット31に挿入されたバーコードリーダモジュール40は、駆動ローラ9の駆動力に基づき、当該バーコードリーダモジュール40が直線ST2よりも後方(図4中の右方)となる位置に駆動される。なお、リーダアンテナ10の図示しない給電点のある面よりも後方にPDA30を駆動するようにしてもよい。この給電点のある面も、各請求項記載のアンテナ素子に相当する。
【0069】
ここで、バーコードリーダモジュール40が移動する上記バーコードリーダモジュール40が直線ST2よりも後方となる位置とは、リーダアンテナ10の放射指向性方向、言い換えれば、通信範囲Sが形成される方向、とは逆方向であって、放射器10aよりも後方となる位置である。なお、この位置が、各請求項記載の後方位置に相当する。
【0070】
図5を用いて、PDA30の制御部35によって実行される制御手順を説明する。
【0071】
図5において、例えば、操作者により、上記着脱部7に装着された状態、かつ、ケーブル20を介しリーダ1に接続された状態、のPDA30の電源がオンにされることによって、図中「START」位置で表されるように、このフローが開始される。
【0072】
まずステップSP5で、制御部35は、操作者により操作部34を介し上記光学読み取りモード及びタグ通信モードのどちらか一方を選択する、モード選択操作が行われたかどうかを判定する。操作者によりモード選択操作が行われるまで、判定が満たされずループ待機する。そして、操作者によりモード選択操作が行われたら、判定が満たされてステップSP10に移る。
【0073】
ステップSP10では、制御部35は、上記操作者により選択されたモードが光学読み取りモードであったかどうかを判定する。光学読み取りモードであった場合には、判定が満たされてステップSP15に移る。
【0074】
ステップSP15では、制御部35は、光学読み取りモードが選択されたモード選択信号の出力、及び、バーコードBの読み取りを行う、光学読み取り処理(詳細手順は後述の図6を参照)を実行する。その後、このフローを終了する。
【0075】
一方、上記ステップSP10において、上記操作者により選択されたモードがタグ通信モードであった場合には、ステップSP10の判定が満たされず、ステップSP20に移る。
【0076】
ステップSP20では、制御部35は、タグ通信モードが選択されたモード選択信号の出力、及び、無線タグTとの無線通信を行う、タグ通信処理(詳細手順は後述の図7を参照)を実行する。そして、このフローを終了する。
【0077】
図6を用いて、上記図5に示すステップSP15の詳細手順、及び、リーダ1の制御回路12によって実行される制御手順を、リーダ1及びPDA30の間で送受される各種信号の送受と共に説明する。なお、この図6では、基本的に図中上側から下側に向かっての時系列変化で各手順を示している。
【0078】
図6において、まずステップSP50で、PDA30の制御部35は、光学読み取りモードに対応したモード選択信号を、外部通信部33及びケーブル20を介しリーダ1に出力する。ここで、モード選択信号とは、光学読み取りモード、若しくは、タグ通信モード、のいずれか一方を選択する信号である。上記のように、操作者によりPDA30の操作部34を介し光学読み取りモードが選択された場合には、光学読み取りモードに対応したモード選択信号がリーダ1に出力される。これにより、リーダ1の制御回路12は、ステップSR5で、上記ステップSP50でPDA30より出力された、光学読み取りモードに対応したモード選択信号を、ケーブル20及び通信制御部11を介し受信する。
【0079】
そして、ステップSR7に移り、リーダ1の制御回路12は、PDA30より入力されたモード選択信号に基づき、バーコードBの読み取りを実行するか否かを判断する。具体的には、バーコードBの読み取りを実行するか、無線タグTとの無線通信を実行するかを判断する。このステップSR7では、上記ステップSR5で入力された光学読み取りモードに対応したモード選択信号に基づき、バーコードBの読み取りを実行すると判断される。
【0080】
その後、ステップSR10で、リーダ1の制御回路12は、上記ステップSR7での判断結果に基づき、予め用意された上記2つのモードのうち、光学読み取りモードを選択する。
【0081】
そして、ステップSR15に移り、リーダ1の制御回路12は、モータ駆動回路13に制御信号を出力し、搬送用モータ14を制御させる。これにより、搬送用モータ14は、モータ駆動回路13の制御に基づき、駆動ローラ9を駆動し、上記光照射範囲Lが直線ST1よりも前方となる位置に、バーコードリーダモジュール40を移動させる(図3を参照)。
【0082】
その後、ステップSR20で、リーダ1の制御回路12は、トリガスイッチ6がオンにされたか、言い換えれば、トリガスイッチ6が把持操作されたかどうかを判定する。トリガスイッチ6がオンにされるまで、判定が満たされずループ待機する。そして、トリガスイッチ6がオンにされたら、判定が満たされてステップSR25に移る。
【0083】
ステップSR25では、リーダ1の制御回路12は、バーコードリーダモジュール40によるバーコードBの読み取りを開始させる開始信号を、通信制御部11及びケーブル20を介しPDA30に出力する。これにより、PDA30の制御部35は、上記開始信号を、ケーブル20及び外部通信部33を介し受信する。
【0084】
そして、ステップSP55に移り、PDA30の制御部35は、バーコードリーダモジュール40による光照射、すなわち、バーコードBの読み取りを開始する。
【0085】
その後、ステップSP60で、PDA30の制御部35は、バーコードリーダモジュール40及びスロット通信部33を介し、バーコードBから情報を取得したかどうかを判定する。バーコードBから情報を取得するまで、判定が満たされずループ待機する。そして、バーコードBから情報を取得したら、判定が満たされてステップSP65に移る。
【0086】
ステップSP65では、PDA30の制御部35は、所定のアプリ処理を実行する。これにより、上記バーコードBから取得した情報を、表示部36に表示させると共に、記憶部37に記憶させる。なお、上記ステップSP55で開始されたバーコードBの読み取りは、後述する停止信号を受信するまで継続して実行される。そして、このステップSP65も、バーコードBから情報が読み取られるごとに実行される。
【0087】
一方、リーダ1の制御回路12は、ステップSR30で、トリガスイッチ6がオフにされたかどうかを判定する。トリガスイッチ6がオフにされるまで、判定が満たされずループ待機する。そして、トリガスイッチ6がオフにされたら、判定が満たされてステップSR35に移る。
【0088】
ステップSR35では、リーダ1の制御回路12は、バーコードBの読み取りを停止させる停止信号を、通信制御部11及びケーブル20を介しPDA30に出力する。これにより、PDA30の制御部35は、上記停止信号を、ケーブル20及び外部通信部33を介し受信する。
【0089】
そして、ステップSP70に移り、PDA30の制御部35は、バーコードリーダモジュール40による光照射、すなわち、バーコードBの読み取りを停止する。
【0090】
一方、リーダ1の制御回路12は、ステップSR40で、所定の終了操作、例えばリーダ1の電源オフ、が行われたかどうかを判定する。終了操作が行われていない場合には、判定が満たされず上記ステップSR20に戻り、同様の手順を繰り返す。終了操作が行われた場合には、判定が満たされて、このフローを終了する。
【0091】
図7を用いて、上記図5に示すステップSP20の詳細手順、及び、リーダ1の制御回路12によって実行される制御手順を、リーダ1及びPDA30の間で送受される各種信号の送受と共に説明する。なお、この図7では、基本的に図中上側から下側に向かっての時系列変化で各手順を示している。
【0092】
図7において、まずステップSP100で、PDA30の制御部35は、タグ通信モードに対応したモード選択信号を、外部通信部33及びケーブル20を介しリーダ1に出力する。これにより、リーダ1の制御回路12は、ステップSR50で、上記ステップSP100でPDA30より出力された、タグ通信モードに対応したモード選択信号を、ケーブル20及び通信制御部11を介し受信する。
【0093】
そして、ステップSR52に移り、リーダ1の制御回路12は、PDA30より受信されたモード選択信号に基づき、バーコードBの読み取りを実行するか否かを判断する。具体的には、バーコードBの読み取りを実行するか、無線タグTとの無線通信を実行するかを判断する。このステップSR52では、上記ステップSR50で受信されたタグ通信モードに対応したモード選択信号に基づき、無線タグTとの無線通信を実行すると判断される。
【0094】
その後、ステップSR55で、リーダ1の制御回路12は、上記ステップSR52での判断結果に基づき、予め用意された上記2つのモードのうち、タグ通信モードを選択する。
【0095】
そして、ステップSR60に移り、リーダ1の制御回路12は、モータ駆動回路13に制御信号を出力し、搬送用モータ14を制御させる。これにより、搬送用モータ14は、モータ駆動回路13の制御に基づき、駆動ローラ9を駆動し、上記バーコードリーダモジュール40が直線ST2よりも後方となる位置に、バーコードリーダモジュール40を移動させる(図4を参照)。
【0096】
その後、ステップSR65で、リーダ1の制御回路12は、トリガスイッチ6がオンにされたかどうかを判定する。トリガスイッチ6がオンにされるまで、判定が満たされずループ待機する。そして、トリガスイッチ6がオンにされたら、判定が満たされてステップSR70に移る。
【0097】
ステップSR70では、リーダ1の制御回路12は、上記通信範囲S内の無線タグTからの無線通信による情報の読み取りを開始する。具体的には、リーダ1の制御回路12は、無線タグTの無線タグ回路部Toに記憶された情報を読み取るためのタグ読み取り信号を、送信回路15及びリーダアンテナ10を介し通信範囲S内の無線タグ回路部Toに送信し、返信を促す。
【0098】
そして、ステップSR75に移り、リーダ1の制御回路12は、上記通信範囲S内の無線タグTから無線通信により情報を取得したかどうかを判定する。具体的には、リーダ1の制御回路12は、上記タグ読み取り信号に対応し通信範囲S内の無線タグ回路部Toから返信された応答信号を、リーダアンテナ10及び受信回路16を介し受信したかどうかを判定する。応答信号を受信するまで、判定が満たされずループ待機する。そして、応答信号を受信したら、判定が満たされて、受信した応答信号に基づき無線タグ回路部Toに記憶された情報を取得し、ステップSR80に移る。
【0099】
ステップSR80では、リーダ1の制御回路12は、上記無線タグTの無線タグ回路部Toから取得した情報を、通信制御部11及びケーブル20を介しPDA30に出力する。これにより、PDA30の制御部35は、上記無線タグTの無線タグ回路部Toから取得した情報を、ケーブル20及び外部通信部33を介し受信する。
【0100】
その後、ステップSP105で、PDA30の制御部35は、所定のアプリ処理を実行する。これにより、上記無線タグTの無線タグ回路部Toから取得した情報を、表示部36に表示させると共に、記憶部37に記憶させる。
【0101】
一方、リーダ1の制御回路12は、ステップSR85で、トリガスイッチ6がオフにされたかどうかを判定する。トリガスイッチ6がオフにされるまで、判定が満たされず上記ステップSR70に戻り、無線タグTから情報の読み取りを繰り返す。そして、トリガスイッチ6がオフにされたら、判定が満たされてステップSR90に移る。
【0102】
ステップSR90では、リーダ1の制御回路12は、上記通信範囲S内の無線タグTからの無線通信による情報の読み取りを停止する。
【0103】
そして、ステップSR95に移り、リーダ1の制御回路12は、所定の終了操作、例えばリーダ1の電源オフ、が行われたかどうかを判定する。終了操作が行われていない場合には、判定が満たされず上記ステップSR65に戻り、同様の手順を繰り返す。終了操作が行われた場合には、判定が満たされて、このフローを終了する。
【0104】
なお、上記において、図6に示すステップSR5と、図7に示すステップSR50とが、各請求項記載のモード選択信号が入力される選択信号入力手段として機能する。また、図6に示すステップSR7と、図7に示すステップSR52とが、各請求項記載の判断手段として機能する。またさらに、図6に示すステップSR15と、図7に示すステップSR60と、モータ駆動回路13とが、進退駆動手段を制御する進退制御手段として機能する。
【0105】
以上説明したように、本実施形態のリーダ1は、リーダアンテナ10により無線タグTと無線通信を行うことができる。また、これと共に、リーダ1は、PDA30を装着してバーコードBを読み取ることもできる。また、リーダ本体1Aには、PDA30を着脱可能に支持する着脱部7が備えられている。そして、この着脱部7にPDA30が装着されると、その装着された状態のPDA30は、駆動ローラ9によって前後方向に進退駆動される。
【0106】
具体的には、PDA30に備えられたバーコードリーダモジュール40によるバーコードBの読み取りを実行するか否かを判断する。そして、バーコードBの読み取りを実行すると判断された場合には、駆動ローラ9は、上記光照射範囲Lが直線ST1よりも前方となる位置に、バーコードリーダモジュール40を移動させる(図3を参照)。この移動により、リーダアンテナ10が上記光照射範囲Lを阻害しなくなる。
【0107】
以上のようにして、本実施形態においては、一般のPDA30を装着し、バーコードBの読み取りを可能としたリーダ1において、光学読み取りへの障害が生じることなく、バーコード読み取りを円滑に実行することができる。
【0108】
また、本実施形態では特に、バーコードリーダモジュール40によるバーコードBの読み取りを実行するか、リーダアンテナ10による無線タグTとの無線通信を実行するかを判断する。そして、無線タグTとの無線通信を実行すると判断された場合には、バーコードリーダモジュール30が上記直線ST2よりも後方となる位置に、当該バーコードリーダモジュール30を移動させる(図4を参照)。この移動により、バーコードリーダモジュール30が、リーダアンテナ10の放射指向性方向、言い換えれば、上記通信範囲Sが形成される方向、とは逆方向であって放射器10aよりも後方となる。これにより、リーダアンテナ10による無線通信を阻害しなくなる。この結果、電波放射への障害が生じることなく、無線通信を円滑に実行することができる。
【0109】
また、本実施形態では特に、操作者がPDA30を用いて光学読み取りモードを選択すると、当該光学読み取りモードの選択に対応したモード選択信号がリーダ1に入力される。そして、これに応じて、バーコードBの読み取りを実行すると判断され、駆動ローラ9が、上記光照射範囲Lが直線ST1よりも前方となる位置に、バーコードリーダモジュール40を移動させる。一方、操作者がPDA30を用いてタグ通信モードを選択すると、当該タグ通信モードの選択に対応したモード選択信号がリーダ1に入力される。そして、これに応じて、無線タグTとの無線通信を実行すると判断され、駆動ローラ9が、上記バーコードリーダモジュール30が上記直線ST2よりも後方となる位置に、バーコードリーダモジュール40を移動させる。以上の結果、操作者がPDA30を操作してモード選択を行うだけで、自動的にPDA30の前後方向駆動が行われ、バーコード読み取り及び無線通信を円滑に実行することができる。
【0110】
なお、本発明は、上記実施形態に限られるものではなく、その趣旨及び技術的思想を逸脱しない範囲内で種々の変形が可能である。以下、そのような変形例を順を追って説明する。
【0111】
(1)アンテナ筐体が前方側に回転する場合(その1)
すなわち、アンテナ筐体を本体筐体2の前方側に対して回転可能に構成するようにしてもよい。
【0112】
図8を用いて、本変形例のリーダの外観構成を説明する。なお、この図8は、前述の図1(a)に対応する図である。図1(a)と同等の部分には同符号を付し説明を省略する。
【0113】
図8において、本変形例の携帯型無線タグ通信装置としてのリーダ1′は、本体筐体2、アンテナ筐体3′、及び把持部5を備えたリーダ本体1Aを有している。
【0114】
本体筐体2は、上記アンテナ筐体3′を本体筐体2の前方側に対して回動駆動する回動駆動軸21を備えている。
【0115】
アンテナ筐体3′は、本体筐体2の前端部に立設されており、上記回動駆動軸21により、本体筐体2の前方側に対して回転可能に接続されている。また、アンテナ筐体3′には、複数(図示の例では5個)の駆動ローラ19を備えたレール18が設けられている。上記以外のアンテナ筐体3′の構成は、前述の図1(a)に示すアンテナ筐体3と同様である。
【0116】
レール18は、アンテナ筐体3′が上方位置(図8中の破線で示したアンテナ筐体3′の位置)に回転した際に、本体筐体2上のレール8と前後方向(図8中の左右方向)に連続するように配置されている。なお、上方位置とは、詳細は後述するが、アンテナ筐体3′が本体筐体2と前後方向に連続する位置である。
【0117】
各駆動ローラ19は、前述の各駆動ローラ9と同様、搬送用モータ14の駆動力がギヤ機構を介し伝達されることによって、それぞれ同期して回転駆動される。なお、この駆動ローラ19も、各請求項記載の進退駆動手段として機能する。すなわち、複数の駆動ローラ9,19は、それぞれ協調して台座7aをレール8,18に沿って前後方向に駆動することにより、間接的に、着脱部7に装着された状態のPDA30を前後進退駆動することができる。
【0118】
リーダ1′の上記以外の構成は、前述の図1(a)に示すリーダ1と同様である。また、PDA30及びバーコードリーダモジュール40の構成は、前述の図1(a)と同様である。
【0119】
図9を用いて、リーダ1′及びPDA30の機能的構成を説明する。なお、この図9は、前述の図2に対応する図である。図2と同等の部分には同符号を付し説明を省略する。
【0120】
図9において、リーダ1′の機能的構成で、前述の図2に示すリーダ1の機能的構成と異なる点は、アンテナ駆動用モータ22、上記回動駆動軸21、及び駆動ローラ19を備えている点である。
【0121】
アンテナ駆動用モータ22は、上記回動駆動軸21を駆動する。
【0122】
回動駆動軸21は、上記アンテナ駆動用モータ22の駆動力に基づき、アンテナ筐体3′を本体筐体2の前方側に対して回動駆動する。
【0123】
なお、これらアンテナ駆動用モータ22及び回動駆動軸21が、各請求項記載の回動駆動手段として機能する。
【0124】
また、本変形例におけるモータ駆動回路13は、搬送用モータ14を制御すると共に、上記アンテナ駆動用モータ22を制御する。また、本変形例における搬送用モータ14は、上述したように、上記複数の駆動ローラ9,19を、それぞれ同期して回転駆動する。
【0125】
リーダ1′の上記以外の機能的構成は、前述の図2に示すリーダ1と同様である。また、PDA30の機能的構成は、前述の図2と同様である。
【0126】
図10を用いて、バーコードBの読み取りを実行すると判断された場合の、リーダ1′の外観を説明する。なお、この図10は、前述の図3に対応する図である。
【0127】
図10に示すように、この場合、アンテナ筐体3′は、回動駆動軸21の駆動力に基づき、当該アンテナ筐体3′と本体筐体2とが前後方向に連続する上方位置(この図10に示す位置)に回転する。そして、PDA30のスロット31に挿入されたバーコードリーダモジュール40は、駆動ローラ9,19の駆動力に基づき、上記上方位置に回転した状態のアンテナ筐体3′上の所定位置に駆動される。具体的には、バーコードリーダモジュール40は、上記光照射範囲Lが直線ST3よりも前方となる位置に駆動される。
【0128】
ここで、バーコードリーダモジュール40が移動する上記光照射範囲Lが直線ST3よりも前方となる位置とは、上記光照射範囲Lが上記上方位置に回転した状態のアンテナ筐体3′よりも前方となる位置である。なお、この位置が、各請求項記載の前方位置に相当する。
【0129】
図11を用いて、無線タグTとの無線通信を実行すると判断された場合の、リーダ1′の外観を説明する。なお、この図11は、前述の図4に対応する図である。
【0130】
図11に示すように、この場合、PDA30のスロット31に挿入されたバーコードリーダモジュール40は、前述の図4と同様、駆動ローラ9,19の駆動力に基づき、当該バーコードリーダモジュール40が直線ST2よりも後方となる位置に駆動される。そして、アンテナ筐体3′は、回動駆動軸21の駆動力に基づき、上記上方位置から下方に下がった下方位置(この図11に示す位置)に回転する。
【0131】
図12を用いて、本変形例における、前述の図5に示すステップSP15の詳細手順、及び、リーダ1′の制御回路12によって実行される制御手順を、リーダ1′及びPDA30の間で送受される各種信号の送受と共に説明する。なお、この図12は、前述の図6に対応する図である。図6と同等の手順には同符号を付し説明を省略する。但し、この図12では、前述の図6に示すリーダ1の制御回路12が実行する制御手順を、リーダ1′の制御回路12が実行している。
【0132】
図12において、前述の図6と異なる点は、ステップSR15に代えてステップSR15′を設け、さらにステップSR10とステップSR15′との間に、ステップSR12を新たに設けた点である。すなわち、ステップSR10で、リーダ1′の制御回路12が、予め用意された上記2つのモードのうち、光学読み取りモードを選択したら、新たに設けたステップSR12に移る。
【0133】
ステップSR12では、リーダ1′の制御回路12は、モータ駆動回路13に制御信号を出力し、アンテナ搬送用モータ22を制御させる。これにより、アンテナ搬送用モータ22は、モータ駆動回路13の制御に基づき、回動駆動軸21を駆動し、上記上方位置にアンテナ筐体3′を回転させる(図10を参照)。
【0134】
そして、ステップSR15に代えて設けたステップSR15′に移り、リーダ1′の制御回路12は、モータ駆動回路13に制御信号を出力し、搬送用モータ14を制御させる。これにより、搬送用モータ14は、モータ駆動回路13の制御に基づき、駆動ローラ9,19を駆動し、上記光照射範囲Lが直線ST3よりも前方となる位置に、バーコードリーダモジュール40を移動させる(図10を参照)。
【0135】
その後のステップSR20以降は、前述の図6と同様であるので、説明を省略する。
【0136】
図13を用いて、本変形例における、前述の図5に示すステップSP20の詳細手順、及び、リーダ1′の制御回路12によって実行される制御手順を、リーダ1′及びPDA30の間で送受される各種信号の送受と共に説明する。なお、この図13は、前述の図7に対応する図である。図7と同等の手順には同符号を付し説明を省略する。但し、この図13では、前述の図7に示すリーダ1の制御回路12が実行する制御手順を、リーダ1′の制御回路12が実行している。
【0137】
図13において、前述の図7と異なる点は、ステップSR60に代えてステップSR60′を設け、さらにステップSR60′とステップSR65との間に、ステップSR62を新たに設けた点である。すなわち、ステップSR55で、リーダ1′の制御回路12が、予め用意された上記2つのモードのうち、タグ通信モードを選択したら、ステップSR60に代えてステップSR60′に移る。
【0138】
ステップSR60′では、リーダ1′の制御回路12は、モータ駆動回路13に制御信号を出力し、搬送用モータ14を制御させる。これにより、搬送用モータ14は、モータ駆動回路13の制御に基づき、駆動ローラ9,19を駆動し、上記バーコードリーダモジュール40が直線ST2よりも後方となる位置に、バーコードリーダモジュール40を移動させる(図11を参照)。
【0139】
そして、新たに設けたステップSR62に移り、リーダ1′の制御回路12は、モータ駆動回路13に制御信号を出力し、アンテナ搬送用モータ22を制御させる。これにより、アンテナ搬送用モータ22は、モータ駆動回路13の制御に基づき、回動駆動軸21を駆動し、上記下方位置にアンテナ筐体3′を回転させる(図11を参照)。
【0140】
その後のステップSR65以降は、前述の図7と同様であるので、説明を省略する。
【0141】
なお、上記において、図12に示すステップSR12と、図13に示すステップSR62と、モータ駆動回路13とが、各請求項記載の回転制御手段として機能する。また、図12に示すステップSR15′と、図13に示すステップSR60′と、モータ駆動回路13とが、進退制御手段として機能する。
【0142】
以上説明したように、本変形例のリーダ1′においては、バーコードBの読み取りを実行すると判断された場合には、回動駆動軸21は、アンテナ筐体3′を上記上方位置に回転させる。そして、駆動ローラ9,19は、上方位置に回転したアンテナ筐体3′上の、上記光照射範囲Lが直線ST3よりも前方となる位置に、バーコードリーダモジュール40を移動させる(図10を参照)。一方、無線タグTとの無線通信を実行すると判断された場合には、回動駆動軸21は、アンテナ筐体3′を上記下方位置に回転させる(図11を参照)。
【0143】
これにより、バーコードBの読み取りを行う際には、アンテナ筐体3′を上記上方位置へと回転させることで、下方のアンテナ筐体3′が邪魔になることなくなる。この結果、バーコードリーダモジュール40が、円滑に装置下方のバーコードBを読み取ることができる。また、無線通信を行う際には、アンテナ筐体3′を上記下方位置へと回転させることで、装置全体の前後方向寸法を縮小し操作性を向上することができる。
【0144】
(2)アンテナ筐体が前方側に回転する場合(その2)
上記(1)の変形例においては、バーコードBの読み取りを実行すると判断された場合には、上記上方位置に回転したアンテナ筐体3′上の、上記光照射範囲Lが直線ST3よりも前方となる位置に、バーコードリーダモジュール40を駆動していたが、これに限られない。すなわち、アンテナ筐体に開口部を設け、バーコードリーダモジュール40による照射光が上記上方位置に回転した状態のアンテナ筐体上で上記開口部を透過するような位置に、バーコードリーダモジュール40を駆動するようにしてもよい。
【0145】
図14を用いて、本変形例のリーダの外観構成を説明する。なお、図14(a)は、リーダを側方から見た外観図であり、前述の図1(a)及び図8に対応する図である。図8と同等の部分には同符号を付し説明を省略する。また、図14(b)は、図14(a)中の矢印Z方向からの矢視図である。
【0146】
図14(a)及び図14(b)において、本変形例の携帯型無線タグ通信装置としてのリーダ1″は、本体筐体2、アンテナ筐体3″、及び把持部5を備えたリーダ本体1Aを有している。
【0147】
アンテナ筐体3″は、前述の図8等に示すアンテナ筐体3′と同様、回動駆動軸21により、本体筐体2の前方側に対して回転可能に接続されている。このアンテナ筐体3″には、複数(図示の例では2個)の駆動ローラ19を備えたレール18Aが設けられている。レール18Aは、前述の図8等に示すレール18よりも、長手方向寸法が小さいことを除いては、レール18と同様である。
【0148】
また、アンテナ筐体3″は、透過部としての開口部23を備えている。開口部23は、PDA30が備えるバーコードリーダモジュール40からの照射光を透過可能な構造である。ここで、PDA30は、本変形例においても、前述の実施形態や上記(1)の変形例と同様、スロット31に挿入されるバーコードリーダモジュール40の光照射方向が下向きとなるように、着脱部7に装着されている(後述の図16も参照)。したがって、上記開口部23は、前述した上方位置に回転した状態のアンテナ筐体3″上の所定位置に駆動されたPDA30が備えるバーコードリーダモジュール40からの照射光を、アンテナ筐体3″の下方へと透過することができる。これにより、バーコードリーダモジュール40は、照射光を開口部23の下方へと透過させつつ、バーコードBの読み取りを行うことができる。
【0149】
リーダ1″の上記以外の構成は、前述の図8に示すリーダ1′と同様である。また、PDA30及びバーコードリーダモジュール40の構成は、前述の図8と同様である。
【0150】
図15を用いて、リーダ1″及びPDA30の機能的構成を説明する。なお、この図15は、前述の図2及び図9に対応する図である。図9と同等の部分には同符号を付し説明を省略する。
【0151】
図15において、リーダ1″の機能的構成で、前述の図9に示すリーダ1′の機能的構成と異なる点は、前述の図9に示すリーダ1′が駆動ローラ19を5個備えているのに対し、この図15に示すリーダ1″が駆動ローラ19を2個備えている点である。これ以外のリーダ1″の機能的構成は、前述の図9に示すリーダ1′と同様である。また、PDA30の機能的構成は、前述の図9と同様である。
【0152】
図16を用いて、バーコードBの読み取りを実行すると判断された場合の、リーダ1″の外観を説明する。なお、この図16は、前述の図3及び図10に対応する図である。
【0153】
図16に示すように、この場合、アンテナ筐体3″は、前述の図10と同様、回動駆動軸21の駆動力に基づき、前述した上方位置に回転する。そして、PDA30のスロット31に挿入されたバーコードリーダモジュール40は、駆動ローラ9,19の駆動力に基づき、上記上方位置に回転した状態のアンテナ筐体3″上の所定位置に駆動される。具体的には、バーコードリーダモジュール40は、上記上方位置に回転した状態のアンテナ筐体3″上で、上記照射光が開口部23を透過するような位置に駆動される。以下適宜、この位置を「照射光透過位置」と称する。なお、この照射光透過位置が、各請求項記載の前方位置に相当する。
【0154】
図17を用いて、無線タグTとの無線通信を実行すると判断された場合の、リーダ1″の外観を説明する。なお、この図17は、前述の図4及び図11に対応する図である。
【0155】
図17に示すように、この場合、PDA30のスロット31に挿入されたバーコードリーダモジュール40は、前述の図11と同様、駆動ローラ9,19の駆動力に基づき、当該バーコードリーダモジュール40が直線ST2よりも後方となる位置に駆動される。そして、アンテナ筐体3″は、前述の図11と同様、回動駆動軸21の駆動力に基づき、前述した下方位置に回転する。
【0156】
図18を用いて、本変形例における、前述の図5に示すステップSP15の詳細手順、及び、リーダ1″の制御回路12によって実行される制御手順を、リーダ1″及びPDA30の間で送受される各種信号の送受と共に説明する。なお、この図18は、前述の図6及び図12に対応する図である。図12と同等の手順には同符号を付し説明を省略する。但し、この図18では、前述の図12に示すリーダ1′の制御回路12が実行する制御手順を、リーダ1″の制御回路12が実行している。
【0157】
図18において、前述の図12と異なる点は、ステップSR15′に代えてステップSR15″を設けた点である。すなわち、ステップSR12で、リーダ1″の制御回路12が、上記上方位置にアンテナ筐体3″を回転させたら、ステップSR15′に代えて設けたステップSR15″に移る。
【0158】
ステップSR15″では、リーダ1″の制御回路12は、モータ駆動回路13に制御信号を出力し、搬送用モータ14を制御させる。これにより、搬送用モータ14は、モータ駆動回路13の制御に基づき、駆動ローラ9,19を駆動し、上記照射光透過位置にバーコードリーダモジュール40を移動させる(図16を参照)。なお、このステップも、各請求項記載の進退制御手段として機能する。
【0159】
その後のステップSR20以降は、前述の図12と同様であるので、説明を省略する。
【0160】
なお、本変形例における、前述の図5に示すステップSP20の詳細手順、及び、リーダ1″の制御回路12によって実行される制御手順は、前述の図13における「リーダ1′」及び「アンテナ筐体3′」の記載を、「リーダ1″」及び「アンテナ筐体3″」に置き換えたフローとほぼ同様であるので、説明を省略する。
【0161】
以上説明したように、本変形例のリーダ1″においては、アンテナ筐体3″が開口部23を備えている。これにより、バーコードリーダモジュール40は、照射光を開口部23の下方へと透過させつつ、バーコードBの読み取りを行うことができる。この結果、駆動ローラ9,19は、上記上方位置に回転した状態のアンテナ筐体3″上で、バーコードリーダモジュール40を当該アンテナ筐体3″の最前端まで駆動する必要はなくなる。また、これと共に、駆動ローラ9,19は、上記照射光透過位置(図16に示す位置)にまで、バーコードリーダモジュール40を駆動すれば足りる。このように、本変形例によれば、駆動ローラ9,19によるPDA30の前後方向駆動距離を低減することができるので、操作者の操作性を向上することができる。
【0162】
(3)トリガスイッチの把持操作に応じてモード選択する場合(その1)
前述の実施形態のリーダ1(図1乃至図4を参照)においては、PDA30側でのモード選択操作に応じて、上記光学読み取りモード又はタグ通信モードのいずれか一方を選択していたが、これに限られない。すなわち、リーダ1側のトリガスイッチ6の把持操作に応じて、上記2つのモードのいずれか一方を選択するようにしてもよい。
【0163】
本変形例では、操作者は、把持部5のトリガスイッチ6(図1参照)を、「半押し」又は「全押し」のいずれかの態様で把持操作することができる。「半押し」は、トリガスイッチ6を浅く押す態様、すなわち、トリガスイッチ6を完全に押し切らない態様である。以下適宜、「半押し」態様での把持操作を、「半押し操作」と称する。なお、この「半押し操作」が、各請求項記載の所定の態様の把持操作に相当する。一方、「全押し」は、トリガスイッチ6を深く押す態様、すなわち、トリガスイッチ6を完全に押し切る態様である。以下適宜、「全押し」態様での把持操作を、「全押し操作」と称する。
【0164】
そして、操作者によりトリガスイッチ6が「半押し操作」された場合には、リーダ1は、モードの切り替えを行い、新たなモードを選択する。そして、駆動ローラ9は、PDA30の前後方向駆動を行う。
【0165】
具体的には、現在選択中のモードがタグ通信モードである場合、すなわち前述したバーコードリーダモジュール40が直線ST2よりも後方となる位置(図4に示す位置)に、バーコードリーダモジュール40が位置していた場合には、リーダ1は、バーコードリーダモジュール40によるバーコードBの読み取りを実行すると判断する。その後、モードの切り替えを行い、新たに光学読み取りモードを選択する。そして、駆動ローラ9は、前述した光照射範囲Lが直線ST1よりも前方となる位置(図3に示す位置)に、バーコードリーダモジュール40を駆動する。
【0166】
また、現在選択中のモードが光学読み取りモードである場合、すなわち上記光照射範囲Lが直線ST1よりも前方となる位置に、バーコードリーダモジュール40が位置していた場合には、リーダ1は、リーダアンテナ10による無線タグTとの無線通信を実行すると判断する。その後、モードの切り替えを行い、新たにタグ通信モードを選択する。そして、駆動ローラ9は、上記バーコードリーダモジュール40が直線ST2よりも後方となる位置に、バーコードリーダモジュール40を駆動する。
【0167】
一方、操作者によりトリガスイッチ6が「全押し操作」された場合には、現在選択中のモードに対応した機能が実行される。
【0168】
具体的には、現在選択中のモードが光学読み取りモードである場合には、バーコードリーダモジュール40によるバーコードBの読み取りが実行される。現在選択中のモードがタグ通信モードである場合には、リーダアンテナ10による無線タグTとの無線通信が実行される。
【0169】
図19を用いて、本変形例において、リーダ1の制御回路12によって実行される制御手順を説明する。
【0170】
図19において、例えば操作者によりリーダ1の電源がオンにされることによって、図中「START」位置で表されるように、このフローが開始される。
【0171】
まずステップSR100で、制御回路12は、トリガスイッチ6がオンにされたか、言い換えれば、トリガスイッチ6が把持操作されたかどうかを判定する。トリガスイッチ6がオンにされるまで、判定が満たされずループ待機する。そして、トリガスイッチ6がオンにされたら、判定が満たされてステップSR105に移る。
【0172】
ステップSR105では、制御回路12は、上記トリガスイッチ6の把持操作が、上記「半押し操作」であったかどうかを判定する。詳細には、制御回路12は、トリガスイッチ6の把持操作に基づき取得された操作情報が、「半押し操作」に基づく操作情報であったかどうかを判定する。トリガスイッチ6の把持操作が「半押し操作」であった場合、すなわち、「半押し操作」に基づく操作情報が取得された場合には、判定が満たされてステップSR110に移る。
【0173】
ステップSR110では、制御回路12は、リーダ1において現在選択中のモードが、光学読み取りモードであるかどうかを判定する。現在選択中のモードがタグ通信モードである場合には、判定が満たされずステップSR115に移る。そして、制御回路12は、光学読み取りモード選択・実行処理(詳細手順は後述の図20参照)を実行する。その後、このフローを終了する。一方、現在選択中のモードが光学読み取りモードである場合には、判定が満たされてステップSR120に移る。そして、制御回路12は、タグ通信モード選択・実行処理(詳細手順は後述の図21参照)を実行する。その後、このフローを終了する。
【0174】
一方、上記ステップSR105において、トリガスイッチ6の把持操作が上記「全押し操作」であった場合、すなわち、「全押し操作」に基づく操作情報が取得された場合には、ステップSR105の判定が満たされず、ステップSR125に移る。
【0175】
ステップSR125では、制御回路12は、リーダ1において現在選択中のモードが、光学読み取りモードであるかどうかを判定する。現在選択中のモードが光学読み取りモードである場合には、判定が満たされて、後述の図20のステップSR25に移る。一方、現在選択中のモードがタグ通信モードである場合には、判定が満たされず、後述の図21のステップSR70に移る。
【0176】
図20を用いて、本変形例における、PDA30の制御部35によって実行される制御手順、及び、上記図19に示すステップSR115の詳細手順を、リーダ1及びPDA30の間で送受される各種信号の送受と共に説明する。なお、この図20は、前述の図6に対応する図である。図6と同等の手順には同符号を付し説明を省略する。
【0177】
図20において、前述の図6と異なる点は、ステップSP50及びステップSR5を省略し、ステップSR7及びステップSR10に代えて、ステップSR7′及びステップSR10′を設け、さらにステップSP52及びステップSR22を新たに設けた点である。
【0178】
すなわち、まずステップSR7に代えて設けたステップSR7′で、リーダ1の制御回路12は、上記図19のステップS110の判定結果に基づき、バーコードBの読み取りを実行するか、無線タグTとの無線通信を実行するかを判断する。このステップSR7′では、上記ステップS110において現在選択中のモードがタグ通信モードであると判定された、言い換えれば上記バーコードリーダモジュール40が直線ST2よりも後方となる位置にバーコードリーダモジュール40が位置している、ことに基づき、バーコードBの読み取りを実行すると判断される。
【0179】
その後、ステップSR10に代えて設けたステップSR10′で、リーダ1の制御回路12は、上記ステップSR7′での判断結果に基づき、予め用意された上記2つのモードのうち、光学読み取りモードを選択する。そして、バーコードリーダモジュール40を有効化するための制御信号を、通信制御部11及びケーブル20を介しPDA30に出力する。これにより、PDA30の制御部35は、上記制御信号を、ケーブル20及び外部通信部33を介し受信する。
【0180】
そして、PDA30の制御部35は、新たに設けたステップSP52において、バーコードリーダモジュール40を有効化する。これにより、バーコードリーダモジュール40による光照射、すなわち、バーコードBの読み取りが可能となる。
【0181】
一方、リーダ1の制御回路12が実行するステップSR15及びステップSR20は、前述の図6と同様であり、上記光照射範囲Lが直線ST1よりも前方となる位置にバーコードリーダモジュール40を移動させ、トリガスイッチ6がオンにされたら、ステップSR20の判定が満たされて、新たに設けたステップSR22に移る。
【0182】
ステップSR22では、リーダ1の制御回路12は、上記トリガスイッチ6の把持操作が、「全押し操作」であったかどうかを判定する。詳細には、リーダ1の制御回路12は、トリガスイッチ6の把持操作に基づき取得された操作情報が、「全押し操作」に基づく操作情報であったかどうかを判定する。トリガスイッチ6の把持操作が「半押し操作」であった場合、すなわち、「半押し操作」に基づく操作情報が取得された場合には、判定が満たされず、後述の図21のステップSR52′に移る。一方、トリガスイッチ6の把持操作が「全押し操作」であった場合、すなわち、「全押し操作」に基づく操作情報が取得された場合には、判定が満たされてステップSR25に移る。
【0183】
その後のステップSR25以降は、前述の図6と同様であるので、説明を省略する。
【0184】
図21を用いて、本変形例における、PDA30の制御部35によって実行される制御手順、及び、上記図19に示すステップSR120の詳細手順を、リーダ1及びPDA30の間で送受される各種信号の送受と共に説明する。なお、この図21は、前述の図7に対応する図である。図7と同等の手順には同符号を付し説明を省略する。
【0185】
図21において、前述の図7と異なる点は、ステップSP100及びステップSR50を省略し、ステップSR52及びステップSR55に代えて、ステップSR52′及びステップSR55′を設け、さらにステップSP102及びステップSR67を新たに設けた点である。
【0186】
すなわち、まずステップSR52に代えて設けたステップSR52′で、リーダ1の制御回路12は、上記図19のステップS110の判定結果に基づき、バーコードBの読み取りを実行するか、無線タグTとの無線通信を実行するかを判断する。このステップSR52′では、上記ステップS110において現在選択中のモードが光学読み取りモードであると判定された、言い換えれば上記光照射範囲Lが直線ST1よりも前方となる位置にバーコードリーダモジュール40が位置している、ことに基づき、無線タグTとの無線通信を実行すると判断される。
【0187】
その後、ステップSR55に代えてステップSR55′で、リーダ1の制御回路12は、上記ステップSR52′での判断結果に基づき、予め用意された上記2つのモードのうち、タグ読み取りモードを選択する。そして、バーコードリーダモジュール40を無効化するための制御信号を、通信制御部11及びケーブル20を介しPDA30に出力する。これにより、PDA30の制御部35は、上記制御信号を、ケーブル20及び外部通信部33を介し受信する。
【0188】
そして、PDA30の制御部35は、新たに設けたステップSP102において、バーコードリーダモジュール40を無効化する。これにより、バーコードリーダモジュール40によるバーコードBの読み取りが不可能となる。
【0189】
一方、リーダ1の制御回路12が実行するステップSR60及びステップSR65は、前述の図7と同様であり、上記バーコードリーダモジュール40が直線ST2よりも後方となる位置にバーコードリーダモジュール40を移動させ、トリガスイッチ6がオンにされたら、ステップSR65の判定が満たされて、新たに設けたステップSR67に移る。
【0190】
ステップSR67では、リーダ1の制御回路12は、上記トリガスイッチ6の把持操作が、「全押し操作」であったかどうかを判定する。詳細には、リーダ1の制御回路12は、トリガスイッチ6の把持操作に基づき取得された操作情報が、「全押し操作」に基づく操作情報であったかどうかを判定する。トリガスイッチ6の把持操作が「半押し操作」であった場合、すなわち、「半押し操作」に基づく操作情報が取得された場合には、判定が満たされず、上記図20のステップSR7′に移る。一方、トリガスイッチ6の把持操作が「全押し操作」であった場合、すなわち、「全押し操作」に基づく操作情報が取得された場合には、判定が満たされてステップSR70に移る。
【0191】
その後のステップSR70以降は、前述の図7と同様であるので、説明を省略する。
【0192】
本変形例においては、バーコードリーダモジュール40が、上記バーコードリーダモジュール40が直線ST2よりも後方となる位置(図4に示す位置)に位置している状態で、操作者がバーコードBの読み取りを意図する場合は、操作者は、トリガスイッチ6を「半押し操作」すればよい。これにより、駆動ローラ9,19が、上記バーコードリーダモジュール40が直線ST2よりも後方となる位置から、上記光照射範囲Lが直線ST1よりも前方となる位置(図3に示す位置)へとバーコードリーダモジュール40を移動させる。この結果、リーダアンテナ10がバーコードリーダモジュール40の光照射範囲Lを阻害しなくなる。
【0193】
逆に、バーコードリーダモジュール40が、上記光照射範囲Lが直線ST1よりも前方となる位置に位置している状態で、操作者が無線タグTとの通信を意図する場合も、操作者は、トリガスイッチ6を「半押し操作」すればよい。これにより、駆動ローラ9,19が、上記光照射範囲Lが直線ST1よりも前方となる位置から、上記バーコードリーダモジュール40が直線ST2よりも後方となる位置へとバーコードリーダモジュール40を移動させる。この結果、バーコードリーダモジュール40がリーダアンテナ10の無線通信を阻害しなくなる。
【0194】
本変形例によれば、前述の実施形態と同様の効果を得る。
【0195】
(4)トリガスイッチの把持操作に応じてモード選択する場合(その2)
前述の(1)の変形例のリーダ1′(図8乃至図11を参照)においては、PDA30側でのモード選択操作に応じて、上記光学読み取りモード又はタグ通信モードのいずれか一方を選択していたが、これに限られない。すなわち、リーダ1′側のトリガスイッチ6の把持操作に応じて、上記2つのモードのいずれか一方を選択するようにしてもよい。
【0196】
ここで、本変形例において、リーダ1′の制御回路12によって実行される制御手順において、前述の図19と異なる点は、ステップSR115及びステップSR120であり、その他の手順は図19の各手順と同様である。但し、本変形例では、前述の図19に示すリーダ1の制御回路12が実行する制御手順を、リーダ1′の制御回路12が実行している。
【0197】
また、本変形例におけるステップSR115の詳細手順において、前述の図20と異なる点は、ステップSR15に代えてステップSR15′を設け、さらにステップSR10′と上記ステップSR15′との間に前述の図12に示すステップSR12を新たに設けた点である。これ以外は、前述の図20と同様であるので説明を省略する。但し、本変形例におけるステップSR115の詳細手順は、リーダ1′の制御回路12が実行している。
【0198】
また、本変形例におけるステップSR120の詳細手順において、前述の図21と異なる点は、ステップSR60に代えてステップSR60′を設け、さらに当該ステップSR60′とステップS65との間に図13に示すステップSR62を新たに設けた点である。これ以外は、前述の図21と同様であるので説明を省略する。但し、本変形例におけるステップSR115の詳細手順は、リーダ1′の制御回路12が実行している。
【0199】
本変形例においては、バーコードリーダモジュール40が、上記バーコードリーダモジュール40が直線ST2よりも後方となる位置(図11に示す位置)に位置している状態で、操作者がバーコードBの読み取りを意図する場合は、操作者は、トリガスイッチ6を半押し操作すればよい。これにより、回動駆動軸21が、前述した下方位置から前述した上方位置へとアンテナ筐体3′を回転させる(図10を参照)。そして、駆動ローラ9,19が、上記バーコードリーダモジュール40が直線ST2よりも後方となる位置から、上記光照射範囲Lが直線ST3よりも前方となる位置(図10に示す位置)へとバーコードリーダモジュール40を移動させる。この結果、リーダアンテナ10がバーコードリーダモジュール40の光照射範囲Lを阻害しなくなる。
【0200】
逆に、バーコードリーダモジュール40が、上記光照射範囲Lが直線ST3よりも前方となる位置に位置している状態で、操作者が無線タグTとの通信を意図する場合も、操作者は、トリガスイッチ6を半押し操作すればよい。これにより、駆動ローラ9,19が、上記光照射範囲Lが直線ST3よりも前方となる位置から、上記バーコードリーダモジュール40が直線ST2よりも後方となる位置へとバーコードリーダモジュール40を移動させる。そして、回動駆動軸21が、前述した上方位置から前述した下方位置へとアンテナ筐体3′を回転させる(図11を参照)。この結果、バーコードリーダモジュール40がリーダアンテナ10の無線通信を阻害しなくなる。
【0201】
このようにして、本変形例によれば、操作者がトリガスイッチ6において半押し操作を行うだけで、自動的にPDA30の前後方向駆動が行われ、バーコード読み取り及び無線通信を円滑に実行することができる。
【0202】
なお、特に説明はしないが、前述の(2)の変形例のリーダ1″についても同様に、リーダ1″側のトリガスイッチ6の把持操作に応じて、上記2つのモードのいずれか一方を選択するようにしてもよい。
【0203】
(5)バーコードリーダモジュールの光照射方向が前向きである場合
以上においては、PDA30のスロット31に挿入されたバーコードリーダモジュール40の光照射方向が下向きとなる場合を例にとって説明したが、これに限られない。すなわち、光照射方向が前向きとなってもよい。
【0204】
図22を用いて、本変形例におけるバーコードリーダモジュールが備えられたPDA30を装着したリーダ1の外観構成を説明する。なお、この図22は、前述したバーコードBの読み取りを実行すると判断された場合の状態を示しており、前述の図1に対応する図である。図1と同等の部分には同符号を付し説明を省略する。
【0205】
図22において、PDA30が備えるスロット31には、光学読み取り手段としてのバーコードリーダモジュール40′が挿入されている。バーコードリーダモジュール40′は、前述の図1等に示すバーコードリーダモジュール40と同様、バーコードBを光学的に読み取ることができる。
【0206】
そして、PDA30は、上記バーコードリーダモジュール40′の光学読み取り方向、すなわち光照射方向が前向きとなるように、着脱部7に装着されている。言い換えれば、PDA30は、上記バーコードリーダモジュール40′による光学読み取り範囲、すなわち光照射範囲L′が前方向(図22中の左方向)に形成されるように、着脱部7に装着されている。
【0207】
本変形例によれば、上記実施形態と同様の効果を得る。さらに、バーコードリーダモジュール40′がバーコードBの読み取りを実行する際には、光照射方向が前向きであるので、下方のアンテナ筐体3が邪魔になることはない。したがって、バーコードBの読み取りが実行しやすい位置までPDA30を駆動すればよく、操作性を向上することができる。
【0208】
(6)その他
以上においては、携帯情報端末としてPDA30を用いた場合を例にとって説明したが、これに限られず、例えば携帯電話などを用いてもよい。
【0209】
図23を用いて、本変形例における携帯情報端末である携帯電話の外観構成を説明する。なお、図23(a)は、携帯電話を正面から見た外観図であり、図23(b)は、携帯電話を背面から見た外観図である。
【0210】
図23(a)及び図23(b)において、本変形例における携帯情報端末としての携帯電話400は、電話機能、ネットワーク機能、例えばBluetooth等の近距離通信機能、及び画像撮影機能等を備えている。この携帯電話400は、携帯アンテナ(図示せず)、光学読み取り手段としてのカメラ403、表示部404、及び操作キー405等を有している。
【0211】
カメラ403は、いわゆるデジタルカメラ機能やバーコードBの読み取り機能等を備えている。なお、上記カメラ403に代えて、携帯電話400が備えるスロット(図示せず)にSDメモリカード型のバーコードリーダモジュールを挿入して、当該バーコードリーダモジュールによりバーコードBを読み取るようにしてもよい。この場合、スロットに挿入されたバーコードリーダモジュールが、光学読み取り手段として機能する。
【0212】
上記のような構成である携帯電話400を用いた場合でも、前述の実施形態や各変形例と同様の効果を得る。
【0213】
なお、以上において、図2、図9、図15の各図中に示す矢印は信号の流れの一例を示すものであり、信号の流れ方向を限定するものではない。
【0214】
また、図5、図6、図7等に示すフローチャートは本発明を上記フローに示す手順に限定するものではなく、発明の趣旨及び技術的思想を逸脱しない範囲内で手順の追加・削除又は順番の変更等をしてもよい。
【0215】
また、以上既に述べた以外にも、上記実施形態や各変形例による手法を適宜組み合わせて利用しても良い。
【0216】
その他、一々例示はしないが、本発明は、その趣旨を逸脱しない範囲内において、種々の変更が加えられて実施されるものである。
【符号の説明】
【0217】
1 リーダ(携帯型無線タグ通信装置)
1′ リーダ(携帯型無線タグ通信装置)
1″ リーダ(携帯型無線タグ通信装置)
1A リーダ本体
2 本体筐体
3 アンテナ筐体
3′ アンテナ筐体
3″ アンテナ筐体
5 把持部
6 トリガスイッチ
7 着脱部
9 駆動ローラ
10 リーダアンテナ(装置アンテナ)
10a 放射器(アンテナ素子)
10b 反射器(アンテナ素子)
13 モータ駆動回路
14 搬送用モータ
19 駆動ローラ
21 回動駆動軸
22 アンテナ駆動用モータ
23 開口部(透過部)
30 PDA(携帯情報端末)
40 バーコードリーダモジュール(光学読み取り手段)
40′ バーコードリーダモジュール(光学読み取り手段)
400 携帯電話(携帯情報端末)
403 カメラ(光学読み取り手段)
B バーコード
L 光照射範囲
L′ 光照射範囲
S 通信範囲
T 無線タグ
【特許請求の範囲】
【請求項1】
バーコードを光学的に読み取り可能な光学読み取り手段が備えられた携帯情報端末を着脱可能に支持する着脱部、及び、無線タグに対し無線通信を行うための装置アンテナ、を備えたリーダ本体と、
前記着脱部に装着された状態の前記携帯情報端末を前後進退駆動する進退駆動手段と、
前記光学読み取り手段による読み取りを実行するか否かを判断する判断手段と、
前記判断手段により前記光学読み取り手段による読み取りを実行すると判断された場合には、前記装置アンテナ側の前方位置に前記携帯情報端末に備えられた前記光学読み取り手段を駆動するように、前記進退駆動手段を制御する進退制御手段と
を有することを特徴とする携帯型無線タグ通信装置。
【請求項2】
前記判断手段は、
前記光学読み取り手段による読み取りを実行するか前記装置アンテナによる無線通信を実行するかを判断し、
前記進退制御手段は、
前記判断手段により前記装置アンテナによる無線通信を実行すると判断された場合には、前記光学読み取り手段が前記装置アンテナの放射指向性方向とは逆方向であって当該装置アンテナのアンテナ素子よりも後方となる後方位置に前記携帯情報端末に備えられた前記光学読み取り手段を駆動するように、前記進退駆動手段を制御する
ことを特徴とする請求項1記載の携帯型無線タグ通信装置。
【請求項3】
前記リーダ本体は、
前記着脱部が設けられた本体筐体と、
前記本体筐体の前方側に対して回転可能に接続され、前記装置アンテナが設けられたアンテナ筐体と、
前記アンテナ筐体を前記本体筐体に対し回動駆動する回動駆動手段と
を備えており、
かつ、
前記判断手段により前記光学読み取り手段による読み取りを実行すると判断された場合には、前記アンテナ筐体と前記本体筐体とが前後方向に連続する上方位置に前記アンテナ筐体を回転させ、前記判断手段により前記装置アンテナによる無線通信を実行すると判断された場合には、前記上方位置から下方に下がった下方位置に前記アンテナ筐体を回転させるように、前記回動駆動手段を制御する回転制御手段を設け、
前記進退制御手段は、
前記判断手段により前記光学読み取り手段による読み取りを実行すると判断された場合には、前記上方位置に回転した状態の前記アンテナ筐体上の前記前方位置に前記携帯情報端末に備えられた前記光学読み取り手段を駆動するように、前記進退駆動手段を制御する
ことを特徴とする請求項2記載の携帯型無線タグ通信装置。
【請求項4】
前記リーダ本体の前記着脱部は、
前記光学読み取り手段の光学読み取り方向が下向きとなるように前記携帯情報端末を装着し、
前記アンテナ筐体は、
前記前方位置に駆動された前記携帯情報端末の前記光学読み取り手段からの照射光を透過させるための透過部を備えており、
前記進退制御手段は、
前記判断手段により前記光学読み取り手段による読み取りを実行すると判断された場合には、前記上方位置に回転した状態の前記アンテナ筐体上で前記照射光が前記透過部を透過するような前記前方位置に前記携帯情報端末に備えられた前記光学読み取り手段を駆動するように、前記進退駆動手段を制御する
ことを特徴とする請求項3記載の携帯型無線タグ通信装置。
【請求項5】
前記携帯情報端末より出力された、前記光学読み取り手段による前記バーコードの読み取りを行う光学読み取りモード、若しくは、前記装置アンテナによる前記無線通信を実行するタグ通信モード、のいずれか一方を選択する、モード選択信号が入力される選択信号入力手段を有し、
前記判断手段は、
前記選択信号入力手段により、前記光学読み取りモードが選択された前記モード選択信号が入力された場合には、前記光学読み取り手段による読み取りを実行すると判断し、前記タグ通信モードが選択された前記モード選択信号が入力された場合には、前記装置アンテナによる無線通信を実行すると判断し、
前記進退駆動手段は、
前記判断手段により前記光学読み取り手段による読み取りを実行すると判断された場合には、前記前方位置に前記携帯情報端末に備えられた前記光学読み取り手段を駆動し、前記判断手段により前記装置アンテナによる無線通信を実行すると判断された場合には、前記後方位置に前記携帯情報端末に備えられた前記光学読み取り手段を駆動するように、前記進退駆動手段を制御する
ことを特徴とする請求項1乃至請求項4のいずれか1項記載の携帯型無線タグ通信装置。
【請求項6】
前記リーダ本体は、
前記本体筐体の下部に位置し、操作者が把持操作可能な把持部を備えており、
前記判断手段は、
前記把持部の所定の態様の把持操作に基づく操作情報が取得されたら、前記後方位置に前記携帯情報端末に備えられた前記光学読み取り手段が位置していた場合には前記光学読み取り手段による読み取りを実行すると判断し、前記前方位置に前記携帯情報端末に備えられた前記光学読み取り手段が位置していた場合には前記装置アンテナによる無線通信を実行すると判断し、
前記進退駆動手段は、
前記判断手段により前記光学読み取り手段による読み取りを実行すると判断された場合には、前記携帯情報端末に備えられた前記光学読み取り手段を前記前方位置へと駆動し、前記判断手段により前記装置アンテナによる無線通信を実行すると判断された場合には、前記携帯情報端末に備えられた前記光学読み取り手段を前記後方位置へと駆動するように、前記進退駆動手段を制御する
ことを特徴とする請求項3又は請求項4記載の携帯型無線タグ通信装置。
【請求項1】
バーコードを光学的に読み取り可能な光学読み取り手段が備えられた携帯情報端末を着脱可能に支持する着脱部、及び、無線タグに対し無線通信を行うための装置アンテナ、を備えたリーダ本体と、
前記着脱部に装着された状態の前記携帯情報端末を前後進退駆動する進退駆動手段と、
前記光学読み取り手段による読み取りを実行するか否かを判断する判断手段と、
前記判断手段により前記光学読み取り手段による読み取りを実行すると判断された場合には、前記装置アンテナ側の前方位置に前記携帯情報端末に備えられた前記光学読み取り手段を駆動するように、前記進退駆動手段を制御する進退制御手段と
を有することを特徴とする携帯型無線タグ通信装置。
【請求項2】
前記判断手段は、
前記光学読み取り手段による読み取りを実行するか前記装置アンテナによる無線通信を実行するかを判断し、
前記進退制御手段は、
前記判断手段により前記装置アンテナによる無線通信を実行すると判断された場合には、前記光学読み取り手段が前記装置アンテナの放射指向性方向とは逆方向であって当該装置アンテナのアンテナ素子よりも後方となる後方位置に前記携帯情報端末に備えられた前記光学読み取り手段を駆動するように、前記進退駆動手段を制御する
ことを特徴とする請求項1記載の携帯型無線タグ通信装置。
【請求項3】
前記リーダ本体は、
前記着脱部が設けられた本体筐体と、
前記本体筐体の前方側に対して回転可能に接続され、前記装置アンテナが設けられたアンテナ筐体と、
前記アンテナ筐体を前記本体筐体に対し回動駆動する回動駆動手段と
を備えており、
かつ、
前記判断手段により前記光学読み取り手段による読み取りを実行すると判断された場合には、前記アンテナ筐体と前記本体筐体とが前後方向に連続する上方位置に前記アンテナ筐体を回転させ、前記判断手段により前記装置アンテナによる無線通信を実行すると判断された場合には、前記上方位置から下方に下がった下方位置に前記アンテナ筐体を回転させるように、前記回動駆動手段を制御する回転制御手段を設け、
前記進退制御手段は、
前記判断手段により前記光学読み取り手段による読み取りを実行すると判断された場合には、前記上方位置に回転した状態の前記アンテナ筐体上の前記前方位置に前記携帯情報端末に備えられた前記光学読み取り手段を駆動するように、前記進退駆動手段を制御する
ことを特徴とする請求項2記載の携帯型無線タグ通信装置。
【請求項4】
前記リーダ本体の前記着脱部は、
前記光学読み取り手段の光学読み取り方向が下向きとなるように前記携帯情報端末を装着し、
前記アンテナ筐体は、
前記前方位置に駆動された前記携帯情報端末の前記光学読み取り手段からの照射光を透過させるための透過部を備えており、
前記進退制御手段は、
前記判断手段により前記光学読み取り手段による読み取りを実行すると判断された場合には、前記上方位置に回転した状態の前記アンテナ筐体上で前記照射光が前記透過部を透過するような前記前方位置に前記携帯情報端末に備えられた前記光学読み取り手段を駆動するように、前記進退駆動手段を制御する
ことを特徴とする請求項3記載の携帯型無線タグ通信装置。
【請求項5】
前記携帯情報端末より出力された、前記光学読み取り手段による前記バーコードの読み取りを行う光学読み取りモード、若しくは、前記装置アンテナによる前記無線通信を実行するタグ通信モード、のいずれか一方を選択する、モード選択信号が入力される選択信号入力手段を有し、
前記判断手段は、
前記選択信号入力手段により、前記光学読み取りモードが選択された前記モード選択信号が入力された場合には、前記光学読み取り手段による読み取りを実行すると判断し、前記タグ通信モードが選択された前記モード選択信号が入力された場合には、前記装置アンテナによる無線通信を実行すると判断し、
前記進退駆動手段は、
前記判断手段により前記光学読み取り手段による読み取りを実行すると判断された場合には、前記前方位置に前記携帯情報端末に備えられた前記光学読み取り手段を駆動し、前記判断手段により前記装置アンテナによる無線通信を実行すると判断された場合には、前記後方位置に前記携帯情報端末に備えられた前記光学読み取り手段を駆動するように、前記進退駆動手段を制御する
ことを特徴とする請求項1乃至請求項4のいずれか1項記載の携帯型無線タグ通信装置。
【請求項6】
前記リーダ本体は、
前記本体筐体の下部に位置し、操作者が把持操作可能な把持部を備えており、
前記判断手段は、
前記把持部の所定の態様の把持操作に基づく操作情報が取得されたら、前記後方位置に前記携帯情報端末に備えられた前記光学読み取り手段が位置していた場合には前記光学読み取り手段による読み取りを実行すると判断し、前記前方位置に前記携帯情報端末に備えられた前記光学読み取り手段が位置していた場合には前記装置アンテナによる無線通信を実行すると判断し、
前記進退駆動手段は、
前記判断手段により前記光学読み取り手段による読み取りを実行すると判断された場合には、前記携帯情報端末に備えられた前記光学読み取り手段を前記前方位置へと駆動し、前記判断手段により前記装置アンテナによる無線通信を実行すると判断された場合には、前記携帯情報端末に備えられた前記光学読み取り手段を前記後方位置へと駆動するように、前記進退駆動手段を制御する
ことを特徴とする請求項3又は請求項4記載の携帯型無線タグ通信装置。
【図1】


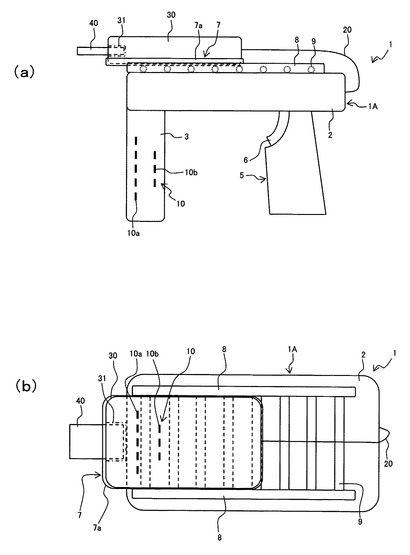
【図2】
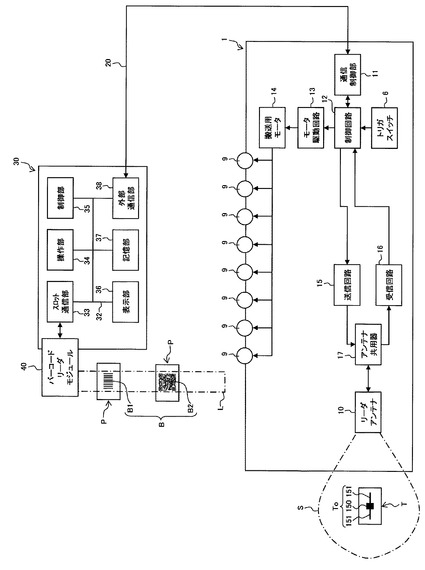
【図3】
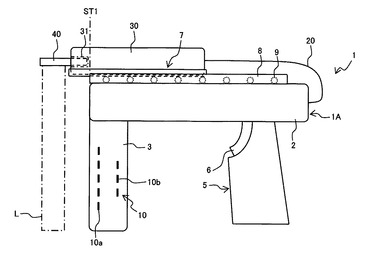
【図4】
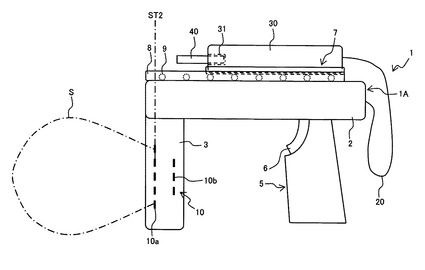
【図5】
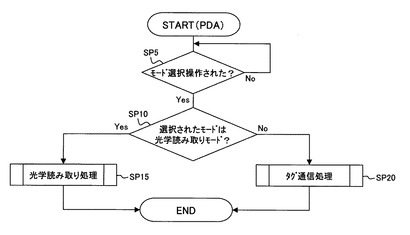
【図6】
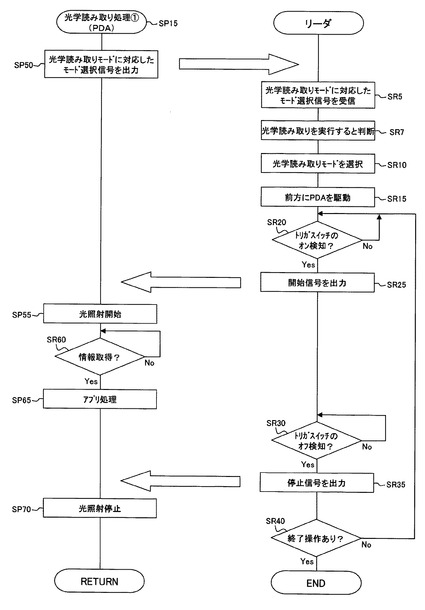
【図7】
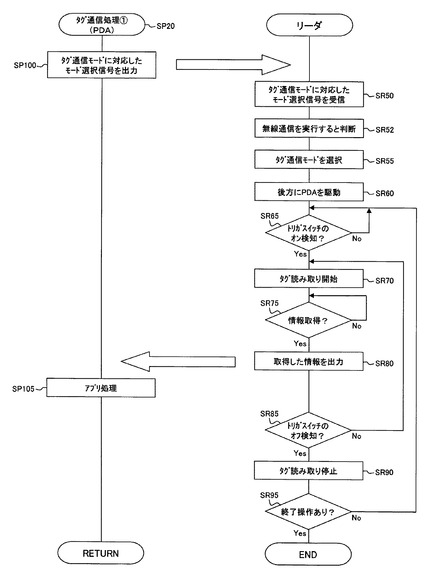
【図8】
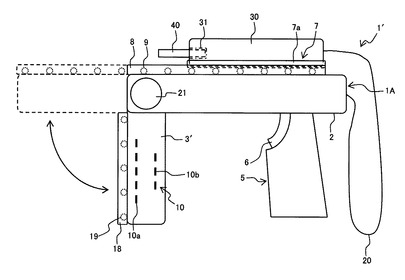
【図9】
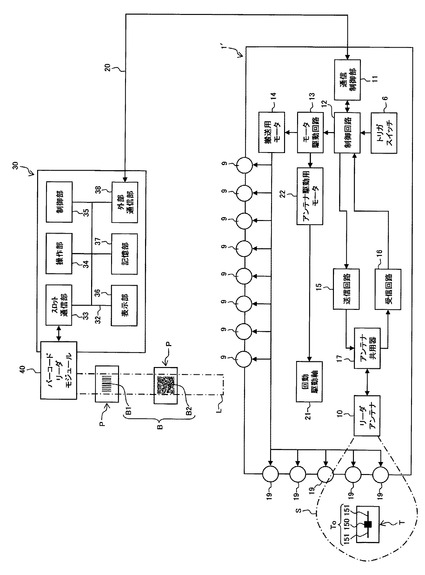
【図10】
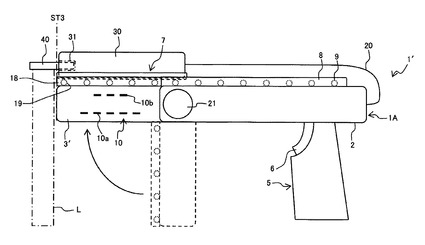
【図11】
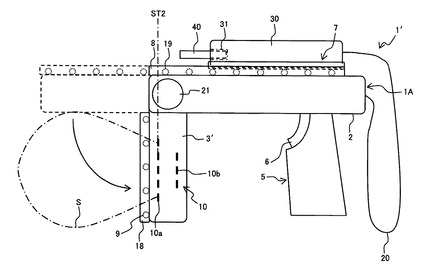
【図12】
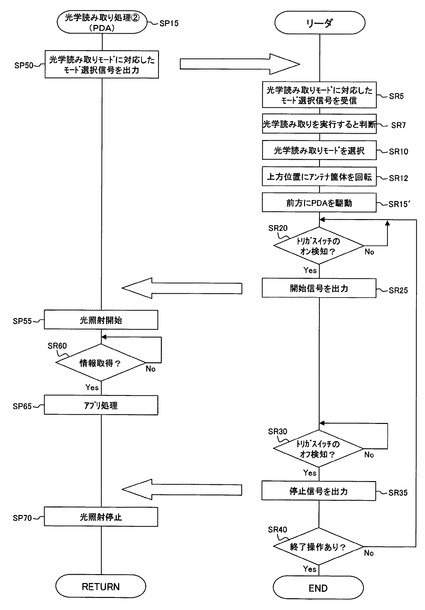
【図13】
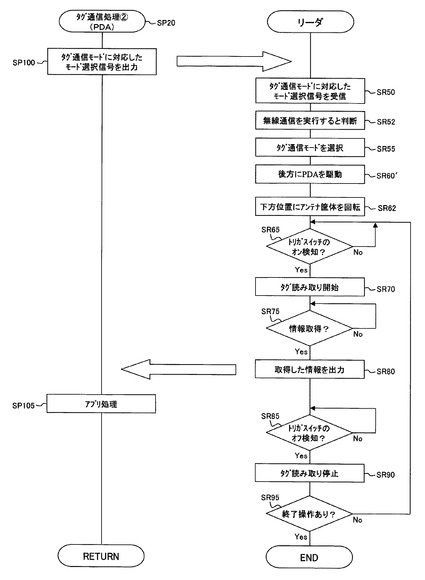
【図14】
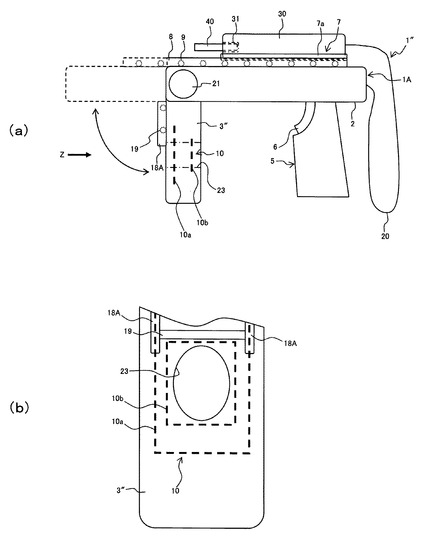
【図15】
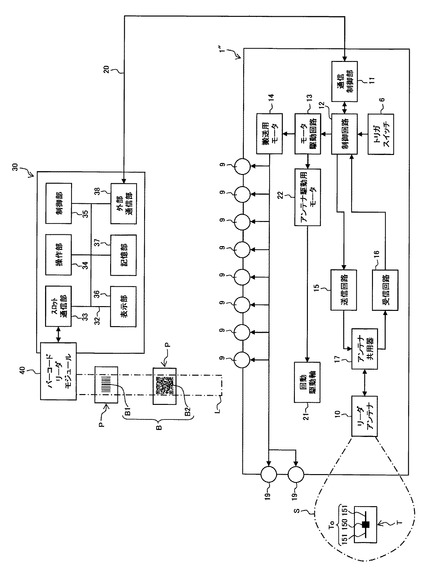
【図16】
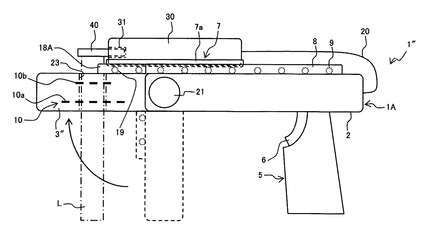
【図17】
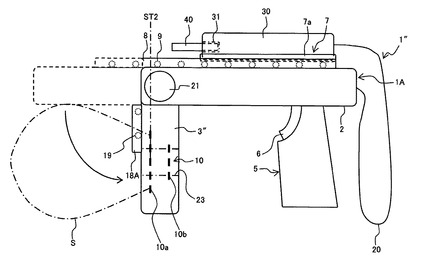
【図18】
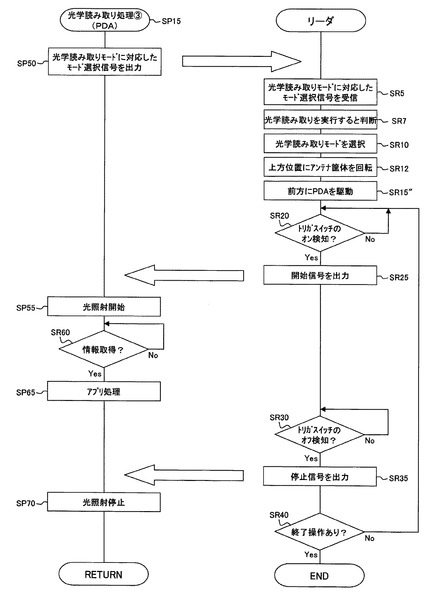
【図19】
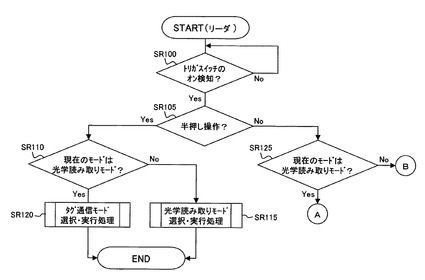
【図20】
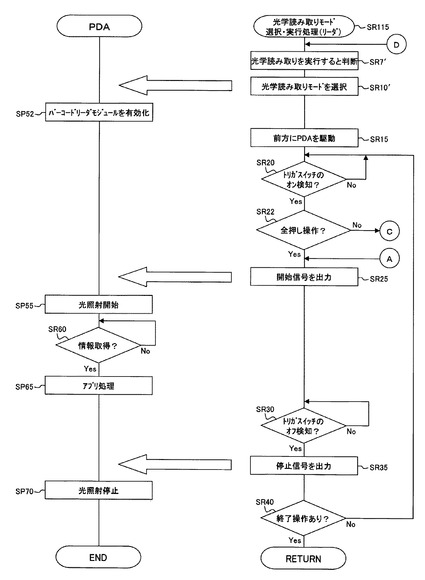
【図21】
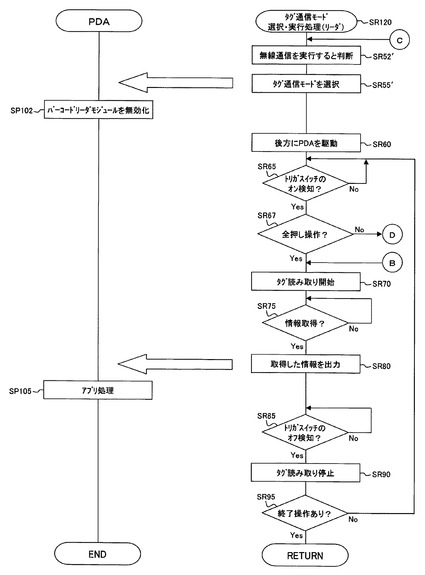
【図22】
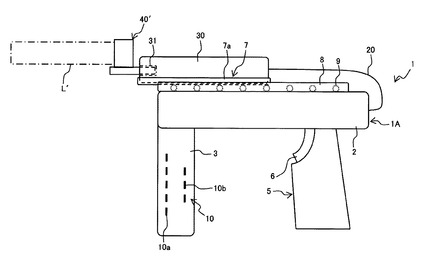
【図23】
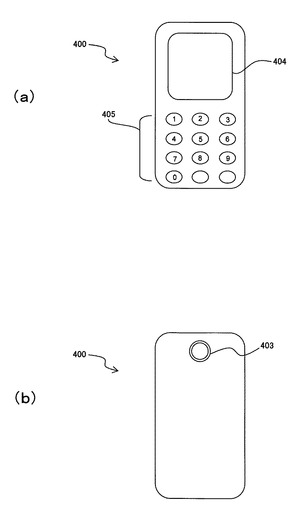
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【公開番号】特開2011−108131(P2011−108131A)
【公開日】平成23年6月2日(2011.6.2)
【国際特許分類】
【出願番号】特願2009−264584(P2009−264584)
【出願日】平成21年11月20日(2009.11.20)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Bluetooth
【出願人】(000005267)ブラザー工業株式会社 (13,856)
【Fターム(参考)】
【公開日】平成23年6月2日(2011.6.2)
【国際特許分類】
【出願日】平成21年11月20日(2009.11.20)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Bluetooth
【出願人】(000005267)ブラザー工業株式会社 (13,856)
【Fターム(参考)】
[ Back to top ]