
携帯型端末器及びその通信制御方法
【課題】無駄な通信の頻度を低減して電力消費量を低減することが可能な携帯型端末器を提供する。
【解決手段】携帯型端末器10の位置特定装置11は所定周期毎に自己位置を検出し、通信装置12は位置特定装置11により検出された位置の情報を送信する。位置情報蓄積装置13は、今回周期の直前の所定数分の位置の情報を履歴データとして保存し、判定領域設定部14aは、保存された履歴データと予め予測されるGPSによる測位誤差とに応じて、判定領域を設定する。位置判定部14bは、検出された今回周期の位置が判定領域内に存在するか否かを判定する。状態判断部14cは、今回周期の位置が判定領域内に存在すると判定された割合が所定割合より大きい場合などに、自己が静止状態であると判断する。さらに、通信装置12は、状態判断部14cにより静止状態であると判断された場合、位置特定装置11により検出された位置の情報について送信を中止する。
【解決手段】携帯型端末器10の位置特定装置11は所定周期毎に自己位置を検出し、通信装置12は位置特定装置11により検出された位置の情報を送信する。位置情報蓄積装置13は、今回周期の直前の所定数分の位置の情報を履歴データとして保存し、判定領域設定部14aは、保存された履歴データと予め予測されるGPSによる測位誤差とに応じて、判定領域を設定する。位置判定部14bは、検出された今回周期の位置が判定領域内に存在するか否かを判定する。状態判断部14cは、今回周期の位置が判定領域内に存在すると判定された割合が所定割合より大きい場合などに、自己が静止状態であると判断する。さらに、通信装置12は、状態判断部14cにより静止状態であると判断された場合、位置特定装置11により検出された位置の情報について送信を中止する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、携帯型端末器及びその通信制御方法に関する。
【背景技術】
【0002】
従来、車両に搭載された車載端末器と歩行者が携帯する携帯型端末器とで情報通信を行って、車両と歩行者との衝突を回避するための報知を車載端末器から行う走行支援システムが提案されている。この走行支援システムにおいて車載端末器は、携帯型端末器が落し物であるか否かを判断する。これにより、落し物となった携帯型端末器が道路上に存在し、現実には発生しない衝突の報知が行われないようにしている。また、この走行支援システムにおいて車載端末器は、GPS(Global Positioning System)に基づく測位情報か
ら携帯型端末器の位置を判断し、一定時間内における位置の変化量が閾値を超えない場合に、携帯型端末器が落し物であると判断している。加えて、携帯型端末器は、自己が落し物であると判断された場合、その位置情報の送信を禁止する(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−10936号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1に記載の走行支援システムにおいて車載端末器は、GPSに基づく測位情報から携帯型端末器の位置を判断するため、測位誤差が大きい場合、一定時間内における位置の変化量が閾値を超えてしまう。これにより、携帯型端末器は落し物と判断されず位置情報の送信を行うこととなり、無駄な通信により電力を消費してしまう。
【0005】
本発明はこのような従来の課題を解決するためになされたものであり、その目的とするところは、無駄な通信の頻度を低減して電力消費量を低減することが可能な携帯型端末器を提供することにある。
【課題を解決するための手段】
【0006】
本発明の携帯型端末器は、歩行者が携帯するものであって、位置検出手段と、通信手段と、位置履歴保存手段と、判定領域設定手段と、位置判定手段と、状態判断手段とを備えている。位置検出手段は所定周期毎に自己位置を検出し、通信手段は位置検出手段により検出された位置の情報を送信する。位置履歴保存手段は、位置検出手段により検出された、今回周期の直前の所定数分の位置の情報を履歴データとして保存し、判定領域設定手段は、位置履歴保存手段により保存された履歴データと予め予測されるグローバルポジショニングシステムによる測位誤差とに応じて、自己が移動状態であるか静止状態であるかを判定するための判定領域を設定する。位置判定手段は、位置検出手段により検出された今回周期の位置が判定領域設定手段により設定された判定領域内に存在するか否かを判定する。状態判断手段は、位置判定手段により今回周期の位置が判定領域内に存在すると判定された割合が所定割合より大きい場合、又は、位置判定手段により所定回数連続して今回周期の位置が判定領域内に存在すると判定された場合、自己が静止状態であると判断する。さらに、通信手段は、状態判断手段により静止状態であると判断された場合、位置検出手段により検出された位置の情報について送信を中止する。
【発明の効果】
【0007】
本発明によれば、予め予測されるグローバルポジショニングシステムによる測位誤差か
ら、携帯型端末器が移動状態であるか静止状態であるかを判定するための判定領域を設定し、今回周期の位置が判定領域内に存在する割合が所定割合より大きい場合、又は、所定回数連続して今回周期の位置が判定領域内に存在すると判定された場合、自己が静止状態であると判断する。このように、判定領域を設定し、その領域内に位置する割合又は連続性から携帯型端末器が移動状態であるか静止状態であるかを判断するため、今回周期の1回だけなどのようにGPSの測位誤差によって静止状態であるにも拘わらず移動状態と判断される可能性が低減されることとなる。これにより、より精度良く静止状態を判断でき、無駄な通信を抑えることができる。従って、無駄な通信の頻度を低減して電力消費量を低減することができる。
【図面の簡単な説明】
【0008】
【図1】本実施形態に係る携帯型端末器を含む走行支援システムの概略構成図である。
【図2】図1に示した携帯型端末器の詳細を示すブロック図である。
【図3】図2に示した判定領域設定部により設定される判定領域を示す概念図である。
【図4】本実施形態に係る携帯型端末器の各状態を示す状態遷移図である。
【図5】図2に示した通信装置による通信状態を示す図である。
【図6】図1に示したサーバー装置の詳細を示すブロック図である。
【図7】図1に示した車載端末器の詳細を示すブロック図である。
【図8】本実施形態に係る携帯型端末器の通信制御方法を示すフローチャートである。
【図9】図8に示した位置特定処理(S1)の詳細を示すフローチャートである。
【図10】図9に示した位置推定処理の詳細を示すイメージ図であり、第1の推定方法のイメージ図を示している。
【図11】図9に示した位置推定処理の詳細を示すイメージ図であり、第2の推定方法のイメージ図を示している。
【図12】図9に示した位置推定処理の詳細を示すイメージ図であり、第3の推定方法のイメージ図を示している。
【図13】図8に示した今回周期の行動判断処理(S2)の詳細を示すフローチャートである。
【図14】図8に示した状態判断処理(S3)の詳細を示すフローチャートである。
【図15】図8に示した送信判定処理(S4)の詳細を示すフローチャートである。
【発明を実施するための形態】
【0009】
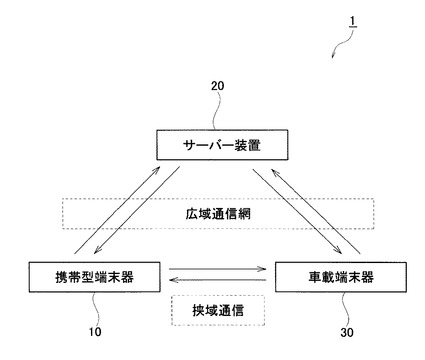
以下、本発明の好適な実施形態を図面に基づいて説明する。図1は、本実施形態に係る携帯型端末器10を含む走行支援システム1の概略構成図である。図1に示すように、走行支援システム1は、携帯型端末器10と、サーバー装置20と、車載端末器30とを備えている。
【0010】
携帯型端末器10は、歩行者に携帯され、自己の位置を検出して外部に送信する機能を備えるものである。サーバー装置20は、広域通信網を介して外部機器と情報の送受信を行うものである。車載端末器30は、車内に搭載され、歩行者と車両との衝突の可能性がある場合に、その旨を運転者に対して提示する装置である。このような走行支援システム1では、携帯型端末器10が自己位置を検出してサーバー装置20に送信する。サーバー装置20は、携帯型端末器10の位置情報を車載端末器30に送信する。また、車載端末器30も自己位置等を検出可能であり、検出した自己位置、車両の進行方向、及び、受信した携帯型端末器10の位置情報から衝突の可能性を算出する。そして、車載端末器30は、衝突の可能性がある場合、その旨を運転者に対して提示する。
【0011】
なお、図1に示す走行支援システム1は、サーバー装置20を備えているが、これに限らず、サーバー装置20を備えることなく携帯型端末器10と車載端末器30とで直接通信するようにしてもよい。この場合、携帯型端末器10と車載端末器30との通信は、狭域通信により行われることとなる。また、以下では、サーバー装置20を備える走行支援システム1を例に説明することとする。
【0012】
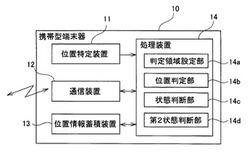
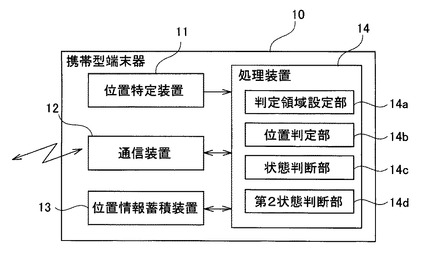
図2は、図1に示した携帯型端末器10の詳細を示すブロック図である。携帯型端末器10は、位置特定装置(位置検出手段)11と、通信装置(通信手段)12と、位置情報蓄積装置(位置履歴保存手段)13と、処理装置14とを備えている。
【0013】
位置特定装置11は、GPS衛星からの電波を受信し、所定周期毎に携帯型端末器10の位置を検出するものである。この位置特定装置11は、例えば、GPS衛星からの電波を受信するためのアンテナや、受信した電波に基づいて自己位置を算出するためのプログラムを実行するCPU(Central Processing Unit)等によって構成されている。通信装
置12は、位置特定装置11により検出された位置の情報を送信するものであって、例えば通信アンテナや通信制御を行うためのプログラムを実行するCPU等によって構成されている。
【0014】
位置情報蓄積装置13は、例えばEEPROMやフラッシュメモリなどの記憶手段により構成され、位置特定装置11によって検出された携帯型端末器10の位置の情報を順次記憶するものである。この位置情報蓄積装置13は、位置特定装置11によって検出された所定周期毎の位置情報のうち、今回周期直前の所定数分の位置情報を履歴データとして保存するものである。
【0015】
処理装置14は、例えばCPUにより構成され、携帯型端末器10の歩行者が静止している場合に、通信装置12により携帯型端末器10の位置情報が送信されることを中止する機能を備えている。処理装置14は、この機能を発揮するために、判定領域設定部(判定領域設定手段)14a、位置判定部(位置判定手段)14b、状態判断部(状態判断手段)14c、及び第2状態判断部(第2状態判断手段)14dを有している。
【0016】
判定領域設定部14aは、位置情報蓄積装置13に保存される履歴データと、予め予測されるグローバルポジショニングシステムによる測位誤差とに応じて、携帯型端末器10が移動状態であるか静止状態であるかを判定するための判定領域を設定するものである。ここで、移動状態とは携帯型端末器10が移動している状態を意味し、静止状態とは携帯型端末器10が静止している状態を意味している。
【0017】
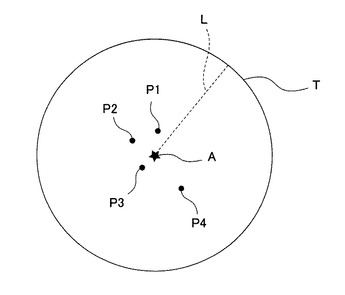
図3は、図2に示した判定領域設定部14aにより設定される判定領域を示す概念図である。なお、図3に示す例では、4つの位置情報が履歴データとして保存されているものとする。図3に示すように、判定領域設定部14aは、履歴データとして保存される4つの位置情報を読み出し、4つの位置情報の平均位置Aを算出する。その後、判定領域設定部14aは、平均位置Aを中心とし、予め定められた距離Lを半径とする円を描き、これを判定領域Tとする。なお、距離Lは、予め予測されるグローバルポジショニングシステムによる測位誤差に応じた距離である。
【0018】
再度、図2を参照する。位置判定部14bは、位置特定装置11により検出された今回周期の位置が判定領域T内に存在するか否かを判断するものである。すなわち、位置判定部14bは、図3に示した円形の判定領域T内に携帯型端末器10が位置しているか否かを判断する。
【0019】
状態判断部14cは、位置判定部14bにより今回周期の位置が判定領域T内に存在す
ると判定された割合が所定割合より大きい場合、又は、位置判定部14bにより所定回数連続して今回周期の位置が判定領域T内に存在すると判定された場合、携帯型端末器10が静止状態であると判断するものである。一方、状態判断部14cは、位置判定部14bにより今回周期の位置が判定領域T内に存在すると判定された割合が所定割合以下である場合、又は、今回周期の位置が判定領域T内に存在することが、位置判定部14bにより所定回数連続して判定されなかった場合、携帯型端末器10が移動状態であると判断するものである。このように、状態判断部14cは、判定領域T内に位置する割合又は連続性から携帯型端末器10が移動状態であるか静止状態であるかを判断するため、今回周期の1回だけなどのようにGPSの測位誤差によって静止状態であるにも拘わらず移動状態と判断される可能性が低減されることとなる。
【0020】
さらに、本実施形態において通信装置12は、状態判断部14cにより静止状態であると判断された場合に、位置特定装置11により検出された位置の情報について送信を中止する。ここで、静止状態においては位置情報を送信しても、携帯型端末器10の位置に変化がなく、携帯型端末器10は無駄に電力を消費してしまう。このため、本実施形態に係る携帯型端末器10は静止状態と判断された場合に位置情報を送信せず、電力消費量を抑えることとしている。
【0021】
第2状態判断部14dは、位置特定装置11により今回周期の位置が判定領域T外に存在する場合、移動中であると判断すると共に、今回周期の位置が判定領域T外に存在しない場合、静止中であると判断するものである。移動中及び静止中の概念については、後述する通常状態において利用される。
【0022】
図4は、本実施形態に係る携帯型端末器10の各状態を示す状態遷移図である。まず、4に示すように、携帯型端末器10が静止状態であるとする。この場合において、位置判定部14bにより今回周期の位置が判定領域T内に存在すると判定された割合が所定割合より大きい場合、又は、位置判定部14bにより所定回数連続して今回周期の位置が判定領域T内に存在すると判定された場合、状態判断部14cは、携帯型端末器10が静止状態であると判断する(S1)。
【0023】
また、携帯型端末器10が静止状態であって、位置判定部14bにより今回周期の位置が判定領域T内に存在すると判定された割合が所定割合以下である場合、又は、今回周期の位置が判定領域T内に存在することが、位置判定部14bにより所定回数連続して判定されなかった場合、状態判断部14cは、携帯型端末器10が移動状態であると判断する(S2)。
【0024】
また、携帯型端末器10が移動状態となったとする。そして、位置判定部14bにより今回周期の位置が判定領域T外に存在すると判定された割合が規定割合より大きいとき、又は、位置判定部14bにより規定回数連続して今回周期の位置が判定領域T外に存在すると判定されたときに、状態判断部14cは、携帯型端末器10が移動状態であると判断する(S3)。
【0025】
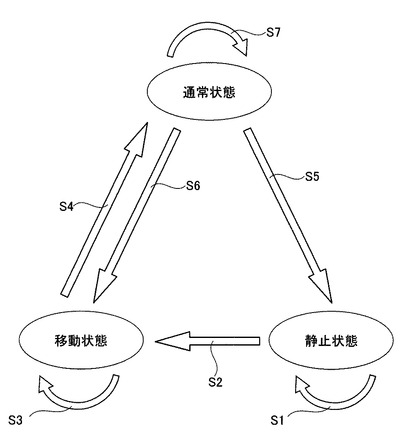
また、携帯型端末器10が移動状態となった場合において、位置判定部14bにより今回周期の位置が判定領域T外に存在すると判定された割合が規定割合以下であるとき、又は、今回周期の位置が判定領域T外に存在することが、位置判定部14bにより規定回数連続して判定されなかったときに、状態判断部14cは、携帯型端末器10が通常状態であると判断する(S4)。ここで、通常状態とは、移動状態と静止状態との中間を示す状態であって、携帯型端末器10が移動しているか静止しているかを判断し難い状態ともいえる。
【0026】
また、携帯型端末器10が通常状態となったとする。この場合において、位置判定部14bにより今回周期の位置が判定領域T内に存在すると判定された割合が所定割合より大きい場合、又は、位置判定部14bにより所定回数連続して今回周期の位置が判定領域T内に存在すると判定された場合、状態判断部14cは、携帯型端末器10が静止状態であると判断する(S5)。
【0027】
さらに、携帯型端末器10が移動状態となった場合において、位置判定部14bにより今回周期の位置が判定領域T外に存在すると判定された割合が規定割合より大きいとき、又は、位置判定部14bにより規定回数連続して今回周期の位置が判定領域T外に存在すると判定されたときに、状態判断部14cは、携帯型端末器10が移動状態であると判断する(S6)。
【0028】
加えて、携帯型端末器10が移動状態となったとする。そして、位置判定部14bにより移動状態及び静止状態の双方の状態でないと判断された場合、状態判断部14cは、携帯型端末器10が通常状態であると判断する(S7)。
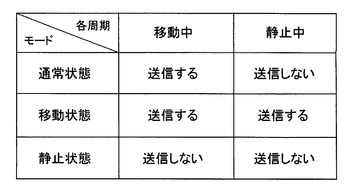
【0029】
図5は、図2に示した通信装置12による通信状態を示す図である。図5に示すように、通信装置12は、状態判断部14cにより移動状態と判断された場合、位置特定装置11により検出された位置の情報を送信する。また、通信装置12は、状態判断部14cにより静止状態と判断された場合、位置特定装置11により検出された位置の情報について送信を中止する。
【0030】
さらに、通信装置12は、状態判断部14cにより通常状態と判断された場合において、第2状態判断部14dにより移動中と判断されていたとき、位置特定装置11により検出された位置の情報を送信する。しかし、通信装置12は、状態判断部14cにより通常状態と判断された場合において、第2状態判断部14dにより静止中と判断されていたとき、位置特定装置11により検出された位置の情報について送信を中止する。このように、移動状態と静止状態との中間の状態を示す通常状態である場合、今回周期の位置から静止中と判断できる場合、携帯型端末器10が移動している可能性は低く、位置の情報について送信を中止することとしている。
【0031】
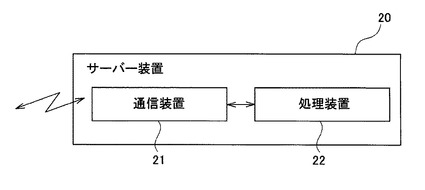
図6は、図1に示したサーバー装置20の詳細を示すブロック図である。図6に示すように、サーバー装置20は、通信装置21と、処理装置22とを備えている。通信装置21は、携帯型端末器10や車載端末器30と情報の送受信を行うものであって、例えば通信アンテナや通信制御を行うためのプログラムを実行するCPU等によって構成されている。処理装置22は、例えばCPUにより構成され、サーバー装置20の各種処理を実行するものである。
【0032】
このようなサーバー装置20は、複数の携帯型端末器10から位置情報を受信すると共に、複数の車載端末器30からも位置情報を受信する。また、サーバー装置20は、複数の携帯型端末器10と複数の車載端末器30とのうち、距離が近いものを選別する。選別後、サーバー装置20は、複数の携帯型端末器10のうち車載端末器30と距離が近い携帯型端末器10の位置情報を車載端末器30に送信する。
【0033】
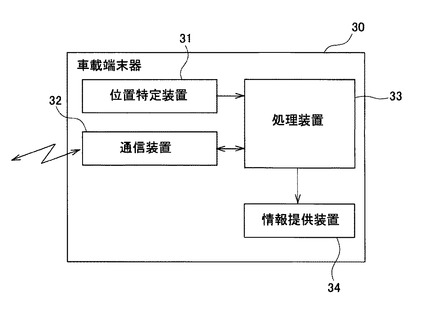
図7は、図1に示した車載端末器30の詳細を示すブロック図である。車載端末器30は、位置特定装置31と、通信装置32と、処理装置33と、情報提供装置34とを備えている。
【0034】
位置特定装置31は、GPS衛星からの電波を受信し、車載端末器30の位置を検出するものである。この位置特定装置31は、図2に示した位置特定装置11と同様に、例え
ば、GPS衛星からの電波を受信するためのアンテナや、受信した電波に基づいて自己位置を算出するためのプログラムを実行するCPU等によって構成されている。通信装置32は、位置特定装置11により検出された位置の情報を送信するものであって、例えば通信アンテナや通信制御を行うためのプログラムを実行するCPU等によって構成されている。
【0035】
処理装置33は、例えばCPUにより構成され、車載端末器30の各種処理を実行するものであり、特に携帯型端末器10を所持する歩行者との衝突の可能性がある場合、その旨の情報を情報提供装置34に送信するものである。情報提供装置34は、ディスプレイなどの表示装置やマイクなどの音声出力装置により構成され、歩行者との衝突の可能性がある場合に、歩行者の存在を知らせるための情報を提示するものである。
【0036】
このような車載端末器30は、位置特定装置31により車載端末器30の位置を検出する。通信装置32は、位置特定装置31により検出された位置の情報をサーバー装置20に送信する。また、車載端末器30と距離が近い携帯型端末器10の位置情報がサーバー装置20から送信されると、処理装置33は、衝突の可能性を判断し、衝突の可能性がある場合に、その旨の情報を情報提供装置34に送信する。これにより、情報提供装置34は歩行者の存在を知らせるための情報を提示する。
【0037】
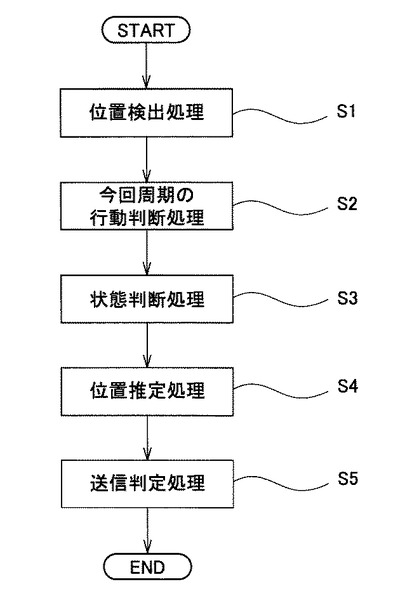
次に、本実施形態に係る携帯型端末器10の通信制御方法について説明する。図8は、本実施形態に係る携帯型端末器10の通信制御方法を示すフローチャートである。まず、図8に示すように、通信装置12はGPS衛星からの電波を受信し、位置特定装置11は、通信装置12により受信された電波に基づいて各種計算処理を行い、携帯型端末器10の位置を検出する(S1)。そして、位置を検出できた場合、位置情報蓄積装置13は、携帯型端末器10の位置の情報を記憶する。
【0038】
次いで、処理装置14は、今回周期の行動判断処理を実行する(S2)。このとき、携帯型端末器10の位置判定部14bは、ステップS1において検出推定された今回周期の自己位置(推定された自己位置も含む)が、判定領域T外に位置しているか否かを判断する。そして、第2状態判断部14dは、自己位置が判定領域T外に位置する場合、携帯型端末器10が移動中であると判断し、自己位置が判定領域T外に位置する場合、携帯型端末器10が静止中であると判断する。
【0039】
その後、処理装置14の状態判断部14cは、状態判断処理を実行する(S3)。このとき、状態判断部14cは、携帯型端末器10が移動状態であるか、静止状態であるか、通常状態であるかを判断する。
【0040】
次に、位置特定装置11は、位置推定処理を実行する(S4)。この処理は、GPS衛星から受信する電波のレベルが規定値に満たない場合に実行される。また、位置特定装置11は、履歴データとして保存される過去の位置から、今回周期の位置を推定する。
【0041】
次に、通信装置12は、送信判定処理を実行する(S5)。このとき、通信装置12は、図5を参照して説明したようにして、送信又は送信の中止を決定する。そして、通信装置12は、送信すると決定した場合、携帯型端末器10の位置情報を送信し、送信しないと決定した場合、携帯型端末器10の位置情報の送信を中止する。その後、図8に示す処理は終了する。
【0042】
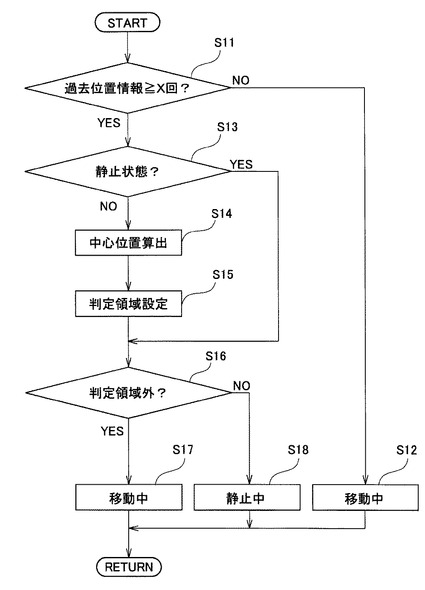
図9は、図8に示した今回周期の行動判断処理(S2)の詳細を示すフローチャートである。図9に示すように、まず、処理装置14は位置情報蓄積装置13に保存される過去の位置情報がX回以上であるか否かを判断する(S11)。位置情報蓄積装置13に保存
される過去の位置情報がX回以上でないと判断した場合(S11:NO)、第2状態判断部14dは、携帯型端末器10が移動中であると判断する(S12)。そして、図9に示す処理は終了し、処理は図8のステップS3に移行する。
【0043】
このように、本実施形態に係る携帯型端末器10では、位置情報蓄積装置13に保存される過去の位置情報がX回以上でない場合、移動中であると判断している。これにより、位置情報の送信頻度を高めるようにしている。すなわち、図5を参照して説明したように、第2状態判断部14dが移動中と判断した場合、状態判断部14cにより静止状態と判断されない限り、通信装置12は位置情報を送信することとなる。特に、位置情報蓄積装置13に保存される過去の位置情報がX回以上でない場合とは、携帯型端末器10の電源投入直後などが考えられ、このような場合に、携帯型端末器10の位置情報を送信しないとなると、サーバー装置20側において携帯型端末器10の存在すら把握できなくなってしまう可能性があるからである。
【0044】
位置情報蓄積装置13に保存される過去の位置情報がX回以上であると判断した場合(S11:YES)、処理装置14は、携帯型端末器10が静止状態であるか否かを判断する(S13)。静止状態であると判断した場合(S13:YES)、処理はステップS16に移行する。一方、静止状態でないと判断した場合(S13:NO)、判定領域設定部14aは、位置情報蓄積装置13に履歴データとして保存される各位置情報に基づいて、中心位置Oを算出する(S14)。
【0045】
次いで、判定領域設定部14aは、判定領域Tを設定する(S15)。このとき、判定領域設定部14aは、ステップS14にて算出した中心位置Oを中心とし、予め予測されるGPSによる測位誤差に応じた距離Lを半径とする円形領域を描き、これを判定領域Tとして設定する。そして、処理はステップS16に移行する。
【0046】
ここで、ステップS13〜S15に示すように、判定領域設定部14aは、携帯型端末器10が静止状態でない場合に判定領域Tが設定され、携帯型端末器10が静止状態である場合に判定領域Tが設定されないこととなる。すなわち、判定領域設定部14aは、静止状態以外の状態から静止状態に移行した場合、設定している判定領域Tの位置を固定することとなる。
【0047】
ステップS16において位置判定部14bは、図8に示した位置検出処理(S1)において検出した位置が判定領域T外であるか否かを判断する(S16)。検出した位置が判定領域T外であると判断した場合(S16:YES)、第2状態判断部14dは、携帯型端末器10が移動中であると判断する(S17)。その後、図13に示す処理は終了し、処理は図8のステップS3に移行する。
【0048】
一方、検出した位置が判定領域T外でないと判断した場合(S16:NO)、第2状態判断部14dは、携帯型端末器10が静止中であると判断する(S18)。その後、図13に示す処理は終了し、処理は図8のステップS3に移行する。
【0049】
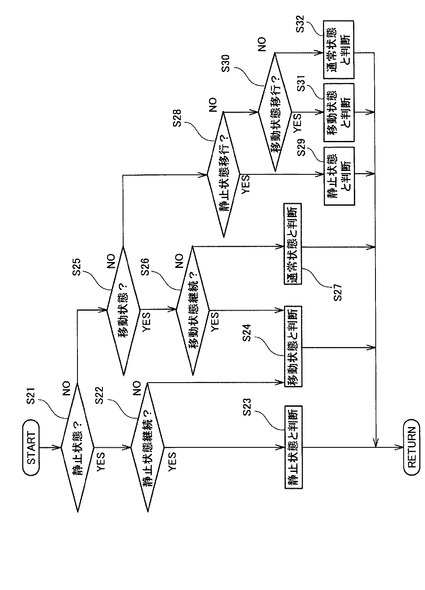
図10は、図8に示した状態判断処理(S3)の詳細を示すフローチャートである。図10に示すように、状態判断部14cは、携帯型端末器10が現在静止状態であるか否かを判断する(S21)。現在静止状態であると判断した場合(S21:YES)、状態判断部14cは静止状態を継続すべきか否かを判断する(S22)。具体的に状態判断部14cは、位置判定部14bにより今回周期の位置が判定領域T内に存在すると判定された割合が所定割合より大きいとき、又は、位置判定部14bにより所定回数連続して今回周期の位置が判定領域T内に存在すると判定されたときに、静止状態を継続すべきと判断する(S22:YES)。そして、状態判断部14cは携帯型端末器10が静止状態である
と判断する(S23)。その後、図10に示す処理は終了し、処理は図8に示すステップS4に移行する。
【0050】
一方、状態判断部14cは、位置判定部14bにより今回周期の位置が判定領域T内に存在すると判定された割合が所定割合以下であるとき、又は、今回周期の位置が判定領域T内に存在することが、位置判定部14bにより所定回数連続して判定されなかったときに、静止状態を継続すべきでないと判断する(S22:NO)。そして、状態判断部14cは、携帯型端末器10が移動状態であると判断する(S24)。その後、図10に示す処理は終了し、処理は図8に示すステップS4に移行する。
【0051】
また、携帯型端末器10が現在静止状態でないと判断した場合(S21:NO)、状態判断部14cは、携帯型端末器10が現在移動状態であるか否かを判断する(S25)。現在移動状態であると判断した場合(S25:YES)、状態判断部14cは移動状態を継続すべきか否かを判断する(S26)。具体的に状態判断部14cは、位置判定部14bにより今回周期の位置が判定領域T外に存在すると判定された割合が規定割合より大きいとき、又は、位置判定部14bにより規定回数連続して今回周期の位置が判定領域T外に存在すると判定されたときに、移動状態を継続すべきであると判断する(S26:YES)。そして、状態判断部14cは携帯型端末器10が移動状態であると判断する(S24)。その後、図10に示す処理は終了し、処理は図8に示すステップS4に移行する。
【0052】
一方、状態判断部14cは、位置判定部14bにより今回周期の位置が判定領域T外に存在すると判定された割合が規定割合以下であるとき、又は、今回周期の位置が判定領域T外に存在することが、位置判定部14bにより規定回数連続して判定されなかったときに、移動状態を継続すべきでないと判断する(S26:NO)。そして、状態判断部14cは、携帯型端末器10が通常状態であると判断する(S27)。その後、図10に示す処理は終了し、処理は図8に示すステップS4に移行する。
【0053】
また、携帯型端末器10が現在移動状態でないと判断した場合(S25:NO)、状態判断部14cは、静止状態に移行すべきか否かを判断する(S28)。具体的に状態判断部14cは、位置判定部14bにより今回周期の位置が判定領域T内に存在すると判定された割合が所定割合より大きいとき、又は、位置判定部14bにより所定回数連続して今回周期の位置が判定領域T内に存在すると判定されたときに、静止状態に移行すべきと判断する(S28:YES)。そして、状態判断部14cは、携帯型端末器10が静止状態であると判断する(S29)。その後、図10に示す処理は終了し、処理は図8に示すステップS4に移行する。
【0054】
一方、状態判断部14cは、位置判定部14bにより今回周期の位置が判定領域T内に存在すると判定された割合が所定割合以下であるとき、又は、今回周期の位置が判定領域T内に存在することが、位置判定部14bにより所定回数連続して判定されなかったときに、静止状態に移行すべきでないと判断する(S28:NO)。
【0055】
そして、状態判断部14cは、移動状態に移行すべきか否かを判断する(S30)。具体的に状態判断部14cは、位置判定部14bにより今回周期の位置が判定領域T外に存在すると判定された割合が規定割合より大きいとき、又は、位置判定部14bにより規定回数連続して今回周期の位置が判定領域T外に存在すると判定されたときに、移動状態に移行すべきであると判断する(S30:YES)。そして、状態判断部14cは携帯型端末器10が移動状態であると判断する(S31)。その後、図10に示す処理は終了し、処理は図8に示すステップS4に移行する。
【0056】
一方、状態判断部14cは、位置判定部14bにより今回周期の位置が判定領域T外に
存在すると判定された割合が規定割合以下であるとき、又は、今回周期の位置が判定領域T外に存在することが、位置判定部14bにより規定回数連続して判定されなかったときに、移動状態に移行すべきでないと判断する(S30:NO)。そして、状態判断部14cは、携帯型端末器10が通常状態であると判断する(S32)。その後、図10に示す処理は終了し、処理は図8に示すステップS4に移行する。
【0057】
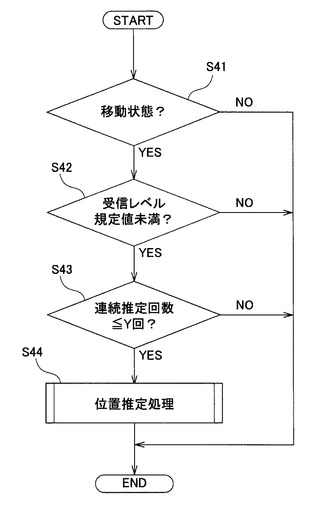
図11は、図8に示した位置推定処理(S4)の詳細を示すフローチャートである。図11に示すように、まず位置特定装置11は、図8に示したステップS3の処理の判断結果が移動状態であったか否かを判断する(S41)。移動状態でなかったと判断された場合(S41:NO)、図11に示す処理は終了する。すなわち、移動状態でなかった場合、携帯型端末器10が静止している可能性があり、このような場合に位置推定処理を行わないようにして、一層電力消費量を抑えることとしている。
【0058】
移動状態であったと判断された場合(S41:YES)、位置特定装置11は、GPS衛星からの電波について受信レベルが規定値未満であるか否かを判断する(S42)。受信レベルが規定値未満でないと判断した場合(S42:NO)、図11に示す処理は終了する。
【0059】
受信レベルが規定値未満であると判断した場合(S42:YES)、位置特定装置11は、連続推定回数がY回(予め定められた回数)以下であるか否かを判断する(S43)。連続推定回数がY回以下でないと判断した場合(S43:NO)、図11に示す処理は終了する。
【0060】
ここで、連続推定回数がY回以下でない場合とは、例えば携帯型端末器10を持った歩行者が室内に入り、電波の受信感度が低くなった場合が想定される。このような場合に、歩行者は室内に長期に留まる可能性があるため、位置推定処理を行わず、一層電力消費量を抑えることとしている。
【0061】
一方、連続推定回数がY回以下であると判断した場合(S43:YES)、位置特定装置11は、位置推定処理を実行する(S44)。これにより、GPS衛星の電波が弱い場所においても、携帯型端末器10の位置を求めるようにしている。その後、図11に示す処理は終了し、処理は図8に示したステップS5に移行する。なお、上記の処理過程において位置情報蓄積装置13は、推定された位置の情報を記憶していく。
【0062】
図12〜図14は、図11に示した位置推定処理の詳細を示すイメージ図であり、図12は第1の推定方法のイメージ図を示し、図13は第2の推定方法のイメージ図を示し、図14は第3の推定方法のイメージ図を示している。
【0063】
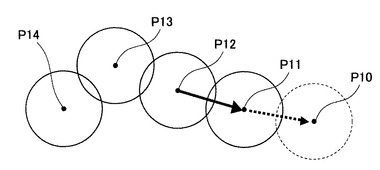
図12〜図14に示すように、位置特定装置11は、第1〜第3の推定方法により携帯型端末器10の位置を推定する。まず、図12に示すように、位置特定装置11は、第1の推定方法において、履歴データとして記憶される直近の2つの位置情報を利用し、今回周期の携帯型端末器10の位置を推定する。すなわち、位置特定装置11は、前回周期の携帯型端末器10の位置P11、及び、前々回周期の携帯型端末器10の位置P12を利用して、今回周期の携帯型端末器10の位置P10を推定し、それより以前の位置P13,P14について推定に用いない。
【0064】
この場合において位置特定装置11は、
V=(|P11−P12|)/S
D(P11→P10)=D(P12→P11)
P10=P11+V・S・D(P11→P10)
なる演算式により、今回周期の携帯型端末器10の位置P10を推定する。ここで、Vは携帯型端末器10の推定速度であり、Sは位置の検出周期である。また、Dは携帯型端末器10の推定移動方向である。
【0065】
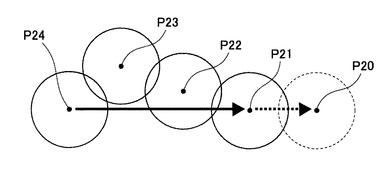
また、図13に示すように、位置特定装置11は、第2の推定方法において、履歴データとして記憶される直近の位置情報と最も古い位置情報とを利用し、今回周期の携帯型端末器10の位置を推定する。すなわち、位置特定装置11は、前回周期の携帯型端末器10の位置P21、及び、最も古い携帯型端末器10の位置P24を利用して、今回周期の携帯型端末器10の位置P20を推定し、それら以外の位置P23,P24について推定に用いない。
【0066】
この場合において位置特定装置11は、
V=(|P21−P24|)/(S・(tp21−tp24))
D(P21→P20)=D(P24→P21)
P20=P21+V・S・D(P21→P20)
なる演算式により、今回周期の携帯型端末器10の位置P20を推定する。ここで、Vは携帯型端末器10の推定速度であり、Sは位置の検出周期である。また、Dは携帯型端末器10の推定移動方向である。さらに、tは、何個目の位置情報であるかを示す数である。
【0067】
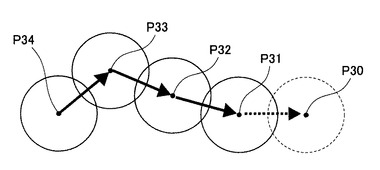
また、図14に示すように、位置特定装置11は、第3の推定方法において、履歴データとして記憶される全ての位置情報を利用し、今回周期の携帯型端末器10の位置を推定する。すなわち、位置特定装置11は、携帯型端末器10の全ての位置P31〜P34を利用して、今回周期の携帯型端末器10の位置P30を推定する。
【0068】
この場合において位置特定装置11は、
V=((|P31−P32|)+(|P32−P33|)+(|P33−P34|))/(S・(tp31−tp34))
D(P31→P30)=D(P34→P33)+D(P33→P32)+D(P32→P31)
P30=P31+V・S・D(P31→P30)
なる演算式により、今回周期の携帯型端末器10の位置P30を推定する。ここで、Vは携帯型端末器10の推定速度であり、Sは位置の検出周期である。また、Dは携帯型端末器10の推定移動方向である。さらに、tは、何個目の位置情報であるかを示す数である。
【0069】
なお、図12〜図14に示す例では、位置情報が4つである場合を例に説明したが、これに限らず、位置情報は5つ以上であってもよい。また、位置特定装置11は、上記3つの推定方法を組み合わせて、今回周期の携帯型端末器10の位置を推定するようにしてもよい。
【0070】
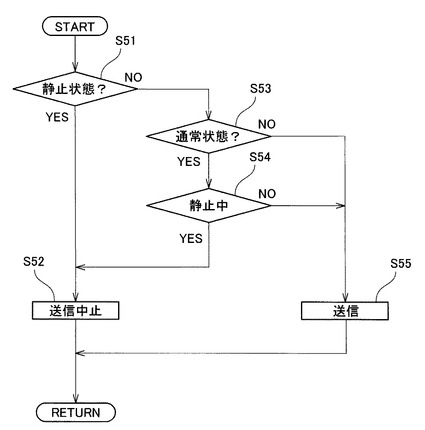
図15は、図8に示した送信判定処理(S5)の詳細を示すフローチャートである。図15に示すように、通信装置12は、まず現在静止状態であるか否かを判断する(S51)。現在静止状態であると判断した場合(S51:YES)、通信装置12は、ステップS1において検出された位置情報の送信を中止する(S52)。その後、図15に示す処理は終了する。
【0071】
一方、現在静止状態であると判断した場合(S51:NO)、通信装置12は、現在通常状態であるか否かを判断する(S53)。現在通常状態であると判断した場合(S53:YES)、通信装置12は、現在静止中であるか否かを判断する(S54)。現在静止
中であると判断した場合(S54:YES)、通信装置12は、ステップS1において検出された位置情報の送信を中止する(S52)。その後、図15に示す処理は終了する。
【0072】
ところで、現在通常状態でないと判断した場合(S53:NO)、又は、現在静止中でないと判断した場合(S54:NO)、通信装置12は、ステップS1において検出された位置情報を送信する(S55)。その後、図15に示す処理は終了する。
【0073】
このようにして、本実施形態に係る携帯型端末器10によれば、予め予測されるGPSによる測位誤差から、携帯型端末器10が移動状態であるか静止状態であるかを判定するための判定領域Tを設定し、今回周期の位置が判定領域T内に存在する割合が所定割合より大きい場合、又は、所定回数連続して今回周期の位置が判定領域T内に存在すると判定された場合、携帯型端末器10が静止状態であると判断する。このように、判定領域Tを設定し、その領域T内に位置する割合又は連続性から携帯型端末器10が移動状態であるか静止状態であるかを判断するため、今回周期の1回だけなどのようにGPSの測位誤差によって静止状態であるにも拘わらず移動状態と判断される可能性が低減されることとなる。これにより、より精度良く静止状態を判断でき、無駄な通信を抑えることができる。従って、無駄な通信の頻度を低減して電力消費量を低減することができる。
【0074】
また、前回判断時に静止状態であると判断された場合に、今回周期の位置が判定領域T内に存在すると判定された割合が所定割合以下であるとき、又は、今回周期の位置が判定領域T内に存在することが、所定回数連続して判定されなかったときに、携帯型端末器10が移動状態であると判断する。このように、判定領域T内に位置する割合又は連続性から移動状態であるかを判断するため、今回周期の1回だけなどのようにGPSの測位誤差によって静止状態であるにも拘わらず移動状態と判断される可能性が低減されることとなる。これにより、より精度良く静止状態を判断でき、無駄な通信を抑えることができる。
【0075】
また、前回判断時に移動状態であると判断された場合に、今回周期の位置が判定領域T外に存在すると判定された割合が規定割合より大きいとき、又は、規定回数連続して今回周期の位置が判定領域T外に存在すると判定されたときに、携帯型端末器10が移動状態であると判断する。このように、前回判断時に移動状態である場合には、判定領域T外に位置する割合又は連続性から移動状態であるかを判断するため、判定領域T内でなく判定領域T外を基準に判断することとなり、携帯型端末器10が移動していることを、より確実に判断することができる。
【0076】
また、今回周期の位置が判定領域T外に存在すると判定された割合が規定割合以下であるとき、又は、今回周期の位置が判定領域T外に存在することが、規定回数連続して判定されなかったときに、携帯型端末器10が移動状態と静止状態との中間の状態を示す通常状態であると判断する。このため、確実に移動状態と判断できない場合には静止状態であると判断せず、移動状態と静止状態との中間の状態を示す通常状態であると判断しておくことで、誤判断の可能性を減じることができる。
【0077】
また、前回判断時に通常状態であると判断された場合に、今回周期の位置が判定領域内に存在すると判定された割合が所定割合より大きいとき、又は、所定回数連続して今回周期の位置が判定領域T内に存在すると判定されたときに、携帯型端末器10が静止状態であると判断する。このように、静止状態を判断することで、一度通常状態を経由した後に、判定領域T内に位置する割合又は連続性から静止状態を判断することとなり、より確実に静止状態を判断することができる。
【0078】
また、今回周期の位置が判定領域T外に存在する場合、移動中であると判断すると共に、今回周期の位置が判定領域T外に存在しない場合、静止中であると判断し、自己が通常
状態であると判断され、且つ、静止中であると判断されていたときに、検出された位置の情報について送信を中止する。このため、移動状態と静止状態との中間の状態を示す通常状態である場合であっても、今回周期の位置から静止中と判断できる場合、携帯型端末器10が移動している可能性は低く、位置の情報について送信を中止する。これにより、一層無駄な通信の頻度を低減して電力消費量を低減することができる。
【0079】
また、静止状態以外の状態と判断され、その後静止状態と判断された場合、設定している判定領域Tの位置を固定する。このため、例えば携帯型端末器10を所持した歩行者がゆっくり歩行するような場合、判定領域Tが固定されていることから、歩行者はいずれ判定領域T外に出ることとなり、移動状態と判断されることとなる。よって、判定領域Tを固定しないと常に静止状態と判断される可能性もあるが、判定領域Tを固定することにより、このような事態を防止して、移動状態の判断精度を向上させることができる。
【0080】
また、GPS衛星から受信する電波のレベルが規定値に満たない場合、履歴データとして保存される過去の位置から、今回周期の位置を推定するため、GPSによる位置検出が困難な場合に位置を推定することとなり、検出位置が欠損を防止することができる。
【0081】
以上、実施形態に基づき本発明を説明したが、本発明は上記実施形態に限られるものでは無く、本発明の趣旨を逸脱しない範囲で、変更を加えてもよいし、各実施形態を組み合わせるようにしてもよい。
【0082】
例えば、上記実施形態において、携帯型端末器10はサーバー装置20を介して車載端末器30と通信するが、これに限らず、携帯型端末器10が車載端末器30と直接通信するようにしてもよい。
【0083】
また、図3に示したように判定領域Tは円形のエリアであるが、円形に限らず、正方形や多角形など他の形状であってもよい。
【0084】
なお、上記実施形態において位置特定装置11が位置検出手段に該当し、通信装置12が通信手段に該当し、位置情報蓄積装置13が位置履歴保存手段に該当する。また、判定領域設定部14aが判定領域設定手段に該当し、位置判定部14bが位置判定手段に該当し、状態判断部14cが状態判断手段に該当する。さらに、第2状態判断部14dが第2状態判断手段に該当する。
【符号の説明】
【0085】
1…走行支援システム
10…携帯型端末器
11…位置特定装置(位置検出手段)
12…通信装置(通信手段)
13…位置情報蓄積装置(位置履歴保存手段)
14…処理装置
14a…判定領域設定部(判定領域設定手段)
14b…位置判定部(位置判定手段)
14c…状態判断部(状態判断手段)
14d…第2状態判断部(第2状態判断手段)
20…サーバー装置
21…通信装置
22…処理装置
30…車載端末器
31…位置特定装置
32…通信装置
33…処理装置
34…情報提供装置
T…判定領域
【技術分野】
【0001】
本発明は、携帯型端末器及びその通信制御方法に関する。
【背景技術】
【0002】
従来、車両に搭載された車載端末器と歩行者が携帯する携帯型端末器とで情報通信を行って、車両と歩行者との衝突を回避するための報知を車載端末器から行う走行支援システムが提案されている。この走行支援システムにおいて車載端末器は、携帯型端末器が落し物であるか否かを判断する。これにより、落し物となった携帯型端末器が道路上に存在し、現実には発生しない衝突の報知が行われないようにしている。また、この走行支援システムにおいて車載端末器は、GPS(Global Positioning System)に基づく測位情報か
ら携帯型端末器の位置を判断し、一定時間内における位置の変化量が閾値を超えない場合に、携帯型端末器が落し物であると判断している。加えて、携帯型端末器は、自己が落し物であると判断された場合、その位置情報の送信を禁止する(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−10936号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1に記載の走行支援システムにおいて車載端末器は、GPSに基づく測位情報から携帯型端末器の位置を判断するため、測位誤差が大きい場合、一定時間内における位置の変化量が閾値を超えてしまう。これにより、携帯型端末器は落し物と判断されず位置情報の送信を行うこととなり、無駄な通信により電力を消費してしまう。
【0005】
本発明はこのような従来の課題を解決するためになされたものであり、その目的とするところは、無駄な通信の頻度を低減して電力消費量を低減することが可能な携帯型端末器を提供することにある。
【課題を解決するための手段】
【0006】
本発明の携帯型端末器は、歩行者が携帯するものであって、位置検出手段と、通信手段と、位置履歴保存手段と、判定領域設定手段と、位置判定手段と、状態判断手段とを備えている。位置検出手段は所定周期毎に自己位置を検出し、通信手段は位置検出手段により検出された位置の情報を送信する。位置履歴保存手段は、位置検出手段により検出された、今回周期の直前の所定数分の位置の情報を履歴データとして保存し、判定領域設定手段は、位置履歴保存手段により保存された履歴データと予め予測されるグローバルポジショニングシステムによる測位誤差とに応じて、自己が移動状態であるか静止状態であるかを判定するための判定領域を設定する。位置判定手段は、位置検出手段により検出された今回周期の位置が判定領域設定手段により設定された判定領域内に存在するか否かを判定する。状態判断手段は、位置判定手段により今回周期の位置が判定領域内に存在すると判定された割合が所定割合より大きい場合、又は、位置判定手段により所定回数連続して今回周期の位置が判定領域内に存在すると判定された場合、自己が静止状態であると判断する。さらに、通信手段は、状態判断手段により静止状態であると判断された場合、位置検出手段により検出された位置の情報について送信を中止する。
【発明の効果】
【0007】
本発明によれば、予め予測されるグローバルポジショニングシステムによる測位誤差か
ら、携帯型端末器が移動状態であるか静止状態であるかを判定するための判定領域を設定し、今回周期の位置が判定領域内に存在する割合が所定割合より大きい場合、又は、所定回数連続して今回周期の位置が判定領域内に存在すると判定された場合、自己が静止状態であると判断する。このように、判定領域を設定し、その領域内に位置する割合又は連続性から携帯型端末器が移動状態であるか静止状態であるかを判断するため、今回周期の1回だけなどのようにGPSの測位誤差によって静止状態であるにも拘わらず移動状態と判断される可能性が低減されることとなる。これにより、より精度良く静止状態を判断でき、無駄な通信を抑えることができる。従って、無駄な通信の頻度を低減して電力消費量を低減することができる。
【図面の簡単な説明】
【0008】
【図1】本実施形態に係る携帯型端末器を含む走行支援システムの概略構成図である。
【図2】図1に示した携帯型端末器の詳細を示すブロック図である。
【図3】図2に示した判定領域設定部により設定される判定領域を示す概念図である。
【図4】本実施形態に係る携帯型端末器の各状態を示す状態遷移図である。
【図5】図2に示した通信装置による通信状態を示す図である。
【図6】図1に示したサーバー装置の詳細を示すブロック図である。
【図7】図1に示した車載端末器の詳細を示すブロック図である。
【図8】本実施形態に係る携帯型端末器の通信制御方法を示すフローチャートである。
【図9】図8に示した位置特定処理(S1)の詳細を示すフローチャートである。
【図10】図9に示した位置推定処理の詳細を示すイメージ図であり、第1の推定方法のイメージ図を示している。
【図11】図9に示した位置推定処理の詳細を示すイメージ図であり、第2の推定方法のイメージ図を示している。
【図12】図9に示した位置推定処理の詳細を示すイメージ図であり、第3の推定方法のイメージ図を示している。
【図13】図8に示した今回周期の行動判断処理(S2)の詳細を示すフローチャートである。
【図14】図8に示した状態判断処理(S3)の詳細を示すフローチャートである。
【図15】図8に示した送信判定処理(S4)の詳細を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の好適な実施形態を図面に基づいて説明する。図1は、本実施形態に係る携帯型端末器10を含む走行支援システム1の概略構成図である。図1に示すように、走行支援システム1は、携帯型端末器10と、サーバー装置20と、車載端末器30とを備えている。
【0010】
携帯型端末器10は、歩行者に携帯され、自己の位置を検出して外部に送信する機能を備えるものである。サーバー装置20は、広域通信網を介して外部機器と情報の送受信を行うものである。車載端末器30は、車内に搭載され、歩行者と車両との衝突の可能性がある場合に、その旨を運転者に対して提示する装置である。このような走行支援システム1では、携帯型端末器10が自己位置を検出してサーバー装置20に送信する。サーバー装置20は、携帯型端末器10の位置情報を車載端末器30に送信する。また、車載端末器30も自己位置等を検出可能であり、検出した自己位置、車両の進行方向、及び、受信した携帯型端末器10の位置情報から衝突の可能性を算出する。そして、車載端末器30は、衝突の可能性がある場合、その旨を運転者に対して提示する。
【0011】
なお、図1に示す走行支援システム1は、サーバー装置20を備えているが、これに限らず、サーバー装置20を備えることなく携帯型端末器10と車載端末器30とで直接通信するようにしてもよい。この場合、携帯型端末器10と車載端末器30との通信は、狭域通信により行われることとなる。また、以下では、サーバー装置20を備える走行支援システム1を例に説明することとする。
【0012】
図2は、図1に示した携帯型端末器10の詳細を示すブロック図である。携帯型端末器10は、位置特定装置(位置検出手段)11と、通信装置(通信手段)12と、位置情報蓄積装置(位置履歴保存手段)13と、処理装置14とを備えている。
【0013】
位置特定装置11は、GPS衛星からの電波を受信し、所定周期毎に携帯型端末器10の位置を検出するものである。この位置特定装置11は、例えば、GPS衛星からの電波を受信するためのアンテナや、受信した電波に基づいて自己位置を算出するためのプログラムを実行するCPU(Central Processing Unit)等によって構成されている。通信装
置12は、位置特定装置11により検出された位置の情報を送信するものであって、例えば通信アンテナや通信制御を行うためのプログラムを実行するCPU等によって構成されている。
【0014】
位置情報蓄積装置13は、例えばEEPROMやフラッシュメモリなどの記憶手段により構成され、位置特定装置11によって検出された携帯型端末器10の位置の情報を順次記憶するものである。この位置情報蓄積装置13は、位置特定装置11によって検出された所定周期毎の位置情報のうち、今回周期直前の所定数分の位置情報を履歴データとして保存するものである。
【0015】
処理装置14は、例えばCPUにより構成され、携帯型端末器10の歩行者が静止している場合に、通信装置12により携帯型端末器10の位置情報が送信されることを中止する機能を備えている。処理装置14は、この機能を発揮するために、判定領域設定部(判定領域設定手段)14a、位置判定部(位置判定手段)14b、状態判断部(状態判断手段)14c、及び第2状態判断部(第2状態判断手段)14dを有している。
【0016】
判定領域設定部14aは、位置情報蓄積装置13に保存される履歴データと、予め予測されるグローバルポジショニングシステムによる測位誤差とに応じて、携帯型端末器10が移動状態であるか静止状態であるかを判定するための判定領域を設定するものである。ここで、移動状態とは携帯型端末器10が移動している状態を意味し、静止状態とは携帯型端末器10が静止している状態を意味している。
【0017】
図3は、図2に示した判定領域設定部14aにより設定される判定領域を示す概念図である。なお、図3に示す例では、4つの位置情報が履歴データとして保存されているものとする。図3に示すように、判定領域設定部14aは、履歴データとして保存される4つの位置情報を読み出し、4つの位置情報の平均位置Aを算出する。その後、判定領域設定部14aは、平均位置Aを中心とし、予め定められた距離Lを半径とする円を描き、これを判定領域Tとする。なお、距離Lは、予め予測されるグローバルポジショニングシステムによる測位誤差に応じた距離である。
【0018】
再度、図2を参照する。位置判定部14bは、位置特定装置11により検出された今回周期の位置が判定領域T内に存在するか否かを判断するものである。すなわち、位置判定部14bは、図3に示した円形の判定領域T内に携帯型端末器10が位置しているか否かを判断する。
【0019】
状態判断部14cは、位置判定部14bにより今回周期の位置が判定領域T内に存在す
ると判定された割合が所定割合より大きい場合、又は、位置判定部14bにより所定回数連続して今回周期の位置が判定領域T内に存在すると判定された場合、携帯型端末器10が静止状態であると判断するものである。一方、状態判断部14cは、位置判定部14bにより今回周期の位置が判定領域T内に存在すると判定された割合が所定割合以下である場合、又は、今回周期の位置が判定領域T内に存在することが、位置判定部14bにより所定回数連続して判定されなかった場合、携帯型端末器10が移動状態であると判断するものである。このように、状態判断部14cは、判定領域T内に位置する割合又は連続性から携帯型端末器10が移動状態であるか静止状態であるかを判断するため、今回周期の1回だけなどのようにGPSの測位誤差によって静止状態であるにも拘わらず移動状態と判断される可能性が低減されることとなる。
【0020】
さらに、本実施形態において通信装置12は、状態判断部14cにより静止状態であると判断された場合に、位置特定装置11により検出された位置の情報について送信を中止する。ここで、静止状態においては位置情報を送信しても、携帯型端末器10の位置に変化がなく、携帯型端末器10は無駄に電力を消費してしまう。このため、本実施形態に係る携帯型端末器10は静止状態と判断された場合に位置情報を送信せず、電力消費量を抑えることとしている。
【0021】
第2状態判断部14dは、位置特定装置11により今回周期の位置が判定領域T外に存在する場合、移動中であると判断すると共に、今回周期の位置が判定領域T外に存在しない場合、静止中であると判断するものである。移動中及び静止中の概念については、後述する通常状態において利用される。
【0022】
図4は、本実施形態に係る携帯型端末器10の各状態を示す状態遷移図である。まず、4に示すように、携帯型端末器10が静止状態であるとする。この場合において、位置判定部14bにより今回周期の位置が判定領域T内に存在すると判定された割合が所定割合より大きい場合、又は、位置判定部14bにより所定回数連続して今回周期の位置が判定領域T内に存在すると判定された場合、状態判断部14cは、携帯型端末器10が静止状態であると判断する(S1)。
【0023】
また、携帯型端末器10が静止状態であって、位置判定部14bにより今回周期の位置が判定領域T内に存在すると判定された割合が所定割合以下である場合、又は、今回周期の位置が判定領域T内に存在することが、位置判定部14bにより所定回数連続して判定されなかった場合、状態判断部14cは、携帯型端末器10が移動状態であると判断する(S2)。
【0024】
また、携帯型端末器10が移動状態となったとする。そして、位置判定部14bにより今回周期の位置が判定領域T外に存在すると判定された割合が規定割合より大きいとき、又は、位置判定部14bにより規定回数連続して今回周期の位置が判定領域T外に存在すると判定されたときに、状態判断部14cは、携帯型端末器10が移動状態であると判断する(S3)。
【0025】
また、携帯型端末器10が移動状態となった場合において、位置判定部14bにより今回周期の位置が判定領域T外に存在すると判定された割合が規定割合以下であるとき、又は、今回周期の位置が判定領域T外に存在することが、位置判定部14bにより規定回数連続して判定されなかったときに、状態判断部14cは、携帯型端末器10が通常状態であると判断する(S4)。ここで、通常状態とは、移動状態と静止状態との中間を示す状態であって、携帯型端末器10が移動しているか静止しているかを判断し難い状態ともいえる。
【0026】
また、携帯型端末器10が通常状態となったとする。この場合において、位置判定部14bにより今回周期の位置が判定領域T内に存在すると判定された割合が所定割合より大きい場合、又は、位置判定部14bにより所定回数連続して今回周期の位置が判定領域T内に存在すると判定された場合、状態判断部14cは、携帯型端末器10が静止状態であると判断する(S5)。
【0027】
さらに、携帯型端末器10が移動状態となった場合において、位置判定部14bにより今回周期の位置が判定領域T外に存在すると判定された割合が規定割合より大きいとき、又は、位置判定部14bにより規定回数連続して今回周期の位置が判定領域T外に存在すると判定されたときに、状態判断部14cは、携帯型端末器10が移動状態であると判断する(S6)。
【0028】
加えて、携帯型端末器10が移動状態となったとする。そして、位置判定部14bにより移動状態及び静止状態の双方の状態でないと判断された場合、状態判断部14cは、携帯型端末器10が通常状態であると判断する(S7)。
【0029】
図5は、図2に示した通信装置12による通信状態を示す図である。図5に示すように、通信装置12は、状態判断部14cにより移動状態と判断された場合、位置特定装置11により検出された位置の情報を送信する。また、通信装置12は、状態判断部14cにより静止状態と判断された場合、位置特定装置11により検出された位置の情報について送信を中止する。
【0030】
さらに、通信装置12は、状態判断部14cにより通常状態と判断された場合において、第2状態判断部14dにより移動中と判断されていたとき、位置特定装置11により検出された位置の情報を送信する。しかし、通信装置12は、状態判断部14cにより通常状態と判断された場合において、第2状態判断部14dにより静止中と判断されていたとき、位置特定装置11により検出された位置の情報について送信を中止する。このように、移動状態と静止状態との中間の状態を示す通常状態である場合、今回周期の位置から静止中と判断できる場合、携帯型端末器10が移動している可能性は低く、位置の情報について送信を中止することとしている。
【0031】
図6は、図1に示したサーバー装置20の詳細を示すブロック図である。図6に示すように、サーバー装置20は、通信装置21と、処理装置22とを備えている。通信装置21は、携帯型端末器10や車載端末器30と情報の送受信を行うものであって、例えば通信アンテナや通信制御を行うためのプログラムを実行するCPU等によって構成されている。処理装置22は、例えばCPUにより構成され、サーバー装置20の各種処理を実行するものである。
【0032】
このようなサーバー装置20は、複数の携帯型端末器10から位置情報を受信すると共に、複数の車載端末器30からも位置情報を受信する。また、サーバー装置20は、複数の携帯型端末器10と複数の車載端末器30とのうち、距離が近いものを選別する。選別後、サーバー装置20は、複数の携帯型端末器10のうち車載端末器30と距離が近い携帯型端末器10の位置情報を車載端末器30に送信する。
【0033】
図7は、図1に示した車載端末器30の詳細を示すブロック図である。車載端末器30は、位置特定装置31と、通信装置32と、処理装置33と、情報提供装置34とを備えている。
【0034】
位置特定装置31は、GPS衛星からの電波を受信し、車載端末器30の位置を検出するものである。この位置特定装置31は、図2に示した位置特定装置11と同様に、例え
ば、GPS衛星からの電波を受信するためのアンテナや、受信した電波に基づいて自己位置を算出するためのプログラムを実行するCPU等によって構成されている。通信装置32は、位置特定装置11により検出された位置の情報を送信するものであって、例えば通信アンテナや通信制御を行うためのプログラムを実行するCPU等によって構成されている。
【0035】
処理装置33は、例えばCPUにより構成され、車載端末器30の各種処理を実行するものであり、特に携帯型端末器10を所持する歩行者との衝突の可能性がある場合、その旨の情報を情報提供装置34に送信するものである。情報提供装置34は、ディスプレイなどの表示装置やマイクなどの音声出力装置により構成され、歩行者との衝突の可能性がある場合に、歩行者の存在を知らせるための情報を提示するものである。
【0036】
このような車載端末器30は、位置特定装置31により車載端末器30の位置を検出する。通信装置32は、位置特定装置31により検出された位置の情報をサーバー装置20に送信する。また、車載端末器30と距離が近い携帯型端末器10の位置情報がサーバー装置20から送信されると、処理装置33は、衝突の可能性を判断し、衝突の可能性がある場合に、その旨の情報を情報提供装置34に送信する。これにより、情報提供装置34は歩行者の存在を知らせるための情報を提示する。
【0037】
次に、本実施形態に係る携帯型端末器10の通信制御方法について説明する。図8は、本実施形態に係る携帯型端末器10の通信制御方法を示すフローチャートである。まず、図8に示すように、通信装置12はGPS衛星からの電波を受信し、位置特定装置11は、通信装置12により受信された電波に基づいて各種計算処理を行い、携帯型端末器10の位置を検出する(S1)。そして、位置を検出できた場合、位置情報蓄積装置13は、携帯型端末器10の位置の情報を記憶する。
【0038】
次いで、処理装置14は、今回周期の行動判断処理を実行する(S2)。このとき、携帯型端末器10の位置判定部14bは、ステップS1において検出推定された今回周期の自己位置(推定された自己位置も含む)が、判定領域T外に位置しているか否かを判断する。そして、第2状態判断部14dは、自己位置が判定領域T外に位置する場合、携帯型端末器10が移動中であると判断し、自己位置が判定領域T外に位置する場合、携帯型端末器10が静止中であると判断する。
【0039】
その後、処理装置14の状態判断部14cは、状態判断処理を実行する(S3)。このとき、状態判断部14cは、携帯型端末器10が移動状態であるか、静止状態であるか、通常状態であるかを判断する。
【0040】
次に、位置特定装置11は、位置推定処理を実行する(S4)。この処理は、GPS衛星から受信する電波のレベルが規定値に満たない場合に実行される。また、位置特定装置11は、履歴データとして保存される過去の位置から、今回周期の位置を推定する。
【0041】
次に、通信装置12は、送信判定処理を実行する(S5)。このとき、通信装置12は、図5を参照して説明したようにして、送信又は送信の中止を決定する。そして、通信装置12は、送信すると決定した場合、携帯型端末器10の位置情報を送信し、送信しないと決定した場合、携帯型端末器10の位置情報の送信を中止する。その後、図8に示す処理は終了する。
【0042】
図9は、図8に示した今回周期の行動判断処理(S2)の詳細を示すフローチャートである。図9に示すように、まず、処理装置14は位置情報蓄積装置13に保存される過去の位置情報がX回以上であるか否かを判断する(S11)。位置情報蓄積装置13に保存
される過去の位置情報がX回以上でないと判断した場合(S11:NO)、第2状態判断部14dは、携帯型端末器10が移動中であると判断する(S12)。そして、図9に示す処理は終了し、処理は図8のステップS3に移行する。
【0043】
このように、本実施形態に係る携帯型端末器10では、位置情報蓄積装置13に保存される過去の位置情報がX回以上でない場合、移動中であると判断している。これにより、位置情報の送信頻度を高めるようにしている。すなわち、図5を参照して説明したように、第2状態判断部14dが移動中と判断した場合、状態判断部14cにより静止状態と判断されない限り、通信装置12は位置情報を送信することとなる。特に、位置情報蓄積装置13に保存される過去の位置情報がX回以上でない場合とは、携帯型端末器10の電源投入直後などが考えられ、このような場合に、携帯型端末器10の位置情報を送信しないとなると、サーバー装置20側において携帯型端末器10の存在すら把握できなくなってしまう可能性があるからである。
【0044】
位置情報蓄積装置13に保存される過去の位置情報がX回以上であると判断した場合(S11:YES)、処理装置14は、携帯型端末器10が静止状態であるか否かを判断する(S13)。静止状態であると判断した場合(S13:YES)、処理はステップS16に移行する。一方、静止状態でないと判断した場合(S13:NO)、判定領域設定部14aは、位置情報蓄積装置13に履歴データとして保存される各位置情報に基づいて、中心位置Oを算出する(S14)。
【0045】
次いで、判定領域設定部14aは、判定領域Tを設定する(S15)。このとき、判定領域設定部14aは、ステップS14にて算出した中心位置Oを中心とし、予め予測されるGPSによる測位誤差に応じた距離Lを半径とする円形領域を描き、これを判定領域Tとして設定する。そして、処理はステップS16に移行する。
【0046】
ここで、ステップS13〜S15に示すように、判定領域設定部14aは、携帯型端末器10が静止状態でない場合に判定領域Tが設定され、携帯型端末器10が静止状態である場合に判定領域Tが設定されないこととなる。すなわち、判定領域設定部14aは、静止状態以外の状態から静止状態に移行した場合、設定している判定領域Tの位置を固定することとなる。
【0047】
ステップS16において位置判定部14bは、図8に示した位置検出処理(S1)において検出した位置が判定領域T外であるか否かを判断する(S16)。検出した位置が判定領域T外であると判断した場合(S16:YES)、第2状態判断部14dは、携帯型端末器10が移動中であると判断する(S17)。その後、図13に示す処理は終了し、処理は図8のステップS3に移行する。
【0048】
一方、検出した位置が判定領域T外でないと判断した場合(S16:NO)、第2状態判断部14dは、携帯型端末器10が静止中であると判断する(S18)。その後、図13に示す処理は終了し、処理は図8のステップS3に移行する。
【0049】
図10は、図8に示した状態判断処理(S3)の詳細を示すフローチャートである。図10に示すように、状態判断部14cは、携帯型端末器10が現在静止状態であるか否かを判断する(S21)。現在静止状態であると判断した場合(S21:YES)、状態判断部14cは静止状態を継続すべきか否かを判断する(S22)。具体的に状態判断部14cは、位置判定部14bにより今回周期の位置が判定領域T内に存在すると判定された割合が所定割合より大きいとき、又は、位置判定部14bにより所定回数連続して今回周期の位置が判定領域T内に存在すると判定されたときに、静止状態を継続すべきと判断する(S22:YES)。そして、状態判断部14cは携帯型端末器10が静止状態である
と判断する(S23)。その後、図10に示す処理は終了し、処理は図8に示すステップS4に移行する。
【0050】
一方、状態判断部14cは、位置判定部14bにより今回周期の位置が判定領域T内に存在すると判定された割合が所定割合以下であるとき、又は、今回周期の位置が判定領域T内に存在することが、位置判定部14bにより所定回数連続して判定されなかったときに、静止状態を継続すべきでないと判断する(S22:NO)。そして、状態判断部14cは、携帯型端末器10が移動状態であると判断する(S24)。その後、図10に示す処理は終了し、処理は図8に示すステップS4に移行する。
【0051】
また、携帯型端末器10が現在静止状態でないと判断した場合(S21:NO)、状態判断部14cは、携帯型端末器10が現在移動状態であるか否かを判断する(S25)。現在移動状態であると判断した場合(S25:YES)、状態判断部14cは移動状態を継続すべきか否かを判断する(S26)。具体的に状態判断部14cは、位置判定部14bにより今回周期の位置が判定領域T外に存在すると判定された割合が規定割合より大きいとき、又は、位置判定部14bにより規定回数連続して今回周期の位置が判定領域T外に存在すると判定されたときに、移動状態を継続すべきであると判断する(S26:YES)。そして、状態判断部14cは携帯型端末器10が移動状態であると判断する(S24)。その後、図10に示す処理は終了し、処理は図8に示すステップS4に移行する。
【0052】
一方、状態判断部14cは、位置判定部14bにより今回周期の位置が判定領域T外に存在すると判定された割合が規定割合以下であるとき、又は、今回周期の位置が判定領域T外に存在することが、位置判定部14bにより規定回数連続して判定されなかったときに、移動状態を継続すべきでないと判断する(S26:NO)。そして、状態判断部14cは、携帯型端末器10が通常状態であると判断する(S27)。その後、図10に示す処理は終了し、処理は図8に示すステップS4に移行する。
【0053】
また、携帯型端末器10が現在移動状態でないと判断した場合(S25:NO)、状態判断部14cは、静止状態に移行すべきか否かを判断する(S28)。具体的に状態判断部14cは、位置判定部14bにより今回周期の位置が判定領域T内に存在すると判定された割合が所定割合より大きいとき、又は、位置判定部14bにより所定回数連続して今回周期の位置が判定領域T内に存在すると判定されたときに、静止状態に移行すべきと判断する(S28:YES)。そして、状態判断部14cは、携帯型端末器10が静止状態であると判断する(S29)。その後、図10に示す処理は終了し、処理は図8に示すステップS4に移行する。
【0054】
一方、状態判断部14cは、位置判定部14bにより今回周期の位置が判定領域T内に存在すると判定された割合が所定割合以下であるとき、又は、今回周期の位置が判定領域T内に存在することが、位置判定部14bにより所定回数連続して判定されなかったときに、静止状態に移行すべきでないと判断する(S28:NO)。
【0055】
そして、状態判断部14cは、移動状態に移行すべきか否かを判断する(S30)。具体的に状態判断部14cは、位置判定部14bにより今回周期の位置が判定領域T外に存在すると判定された割合が規定割合より大きいとき、又は、位置判定部14bにより規定回数連続して今回周期の位置が判定領域T外に存在すると判定されたときに、移動状態に移行すべきであると判断する(S30:YES)。そして、状態判断部14cは携帯型端末器10が移動状態であると判断する(S31)。その後、図10に示す処理は終了し、処理は図8に示すステップS4に移行する。
【0056】
一方、状態判断部14cは、位置判定部14bにより今回周期の位置が判定領域T外に
存在すると判定された割合が規定割合以下であるとき、又は、今回周期の位置が判定領域T外に存在することが、位置判定部14bにより規定回数連続して判定されなかったときに、移動状態に移行すべきでないと判断する(S30:NO)。そして、状態判断部14cは、携帯型端末器10が通常状態であると判断する(S32)。その後、図10に示す処理は終了し、処理は図8に示すステップS4に移行する。
【0057】
図11は、図8に示した位置推定処理(S4)の詳細を示すフローチャートである。図11に示すように、まず位置特定装置11は、図8に示したステップS3の処理の判断結果が移動状態であったか否かを判断する(S41)。移動状態でなかったと判断された場合(S41:NO)、図11に示す処理は終了する。すなわち、移動状態でなかった場合、携帯型端末器10が静止している可能性があり、このような場合に位置推定処理を行わないようにして、一層電力消費量を抑えることとしている。
【0058】
移動状態であったと判断された場合(S41:YES)、位置特定装置11は、GPS衛星からの電波について受信レベルが規定値未満であるか否かを判断する(S42)。受信レベルが規定値未満でないと判断した場合(S42:NO)、図11に示す処理は終了する。
【0059】
受信レベルが規定値未満であると判断した場合(S42:YES)、位置特定装置11は、連続推定回数がY回(予め定められた回数)以下であるか否かを判断する(S43)。連続推定回数がY回以下でないと判断した場合(S43:NO)、図11に示す処理は終了する。
【0060】
ここで、連続推定回数がY回以下でない場合とは、例えば携帯型端末器10を持った歩行者が室内に入り、電波の受信感度が低くなった場合が想定される。このような場合に、歩行者は室内に長期に留まる可能性があるため、位置推定処理を行わず、一層電力消費量を抑えることとしている。
【0061】
一方、連続推定回数がY回以下であると判断した場合(S43:YES)、位置特定装置11は、位置推定処理を実行する(S44)。これにより、GPS衛星の電波が弱い場所においても、携帯型端末器10の位置を求めるようにしている。その後、図11に示す処理は終了し、処理は図8に示したステップS5に移行する。なお、上記の処理過程において位置情報蓄積装置13は、推定された位置の情報を記憶していく。
【0062】
図12〜図14は、図11に示した位置推定処理の詳細を示すイメージ図であり、図12は第1の推定方法のイメージ図を示し、図13は第2の推定方法のイメージ図を示し、図14は第3の推定方法のイメージ図を示している。
【0063】
図12〜図14に示すように、位置特定装置11は、第1〜第3の推定方法により携帯型端末器10の位置を推定する。まず、図12に示すように、位置特定装置11は、第1の推定方法において、履歴データとして記憶される直近の2つの位置情報を利用し、今回周期の携帯型端末器10の位置を推定する。すなわち、位置特定装置11は、前回周期の携帯型端末器10の位置P11、及び、前々回周期の携帯型端末器10の位置P12を利用して、今回周期の携帯型端末器10の位置P10を推定し、それより以前の位置P13,P14について推定に用いない。
【0064】
この場合において位置特定装置11は、
V=(|P11−P12|)/S
D(P11→P10)=D(P12→P11)
P10=P11+V・S・D(P11→P10)
なる演算式により、今回周期の携帯型端末器10の位置P10を推定する。ここで、Vは携帯型端末器10の推定速度であり、Sは位置の検出周期である。また、Dは携帯型端末器10の推定移動方向である。
【0065】
また、図13に示すように、位置特定装置11は、第2の推定方法において、履歴データとして記憶される直近の位置情報と最も古い位置情報とを利用し、今回周期の携帯型端末器10の位置を推定する。すなわち、位置特定装置11は、前回周期の携帯型端末器10の位置P21、及び、最も古い携帯型端末器10の位置P24を利用して、今回周期の携帯型端末器10の位置P20を推定し、それら以外の位置P23,P24について推定に用いない。
【0066】
この場合において位置特定装置11は、
V=(|P21−P24|)/(S・(tp21−tp24))
D(P21→P20)=D(P24→P21)
P20=P21+V・S・D(P21→P20)
なる演算式により、今回周期の携帯型端末器10の位置P20を推定する。ここで、Vは携帯型端末器10の推定速度であり、Sは位置の検出周期である。また、Dは携帯型端末器10の推定移動方向である。さらに、tは、何個目の位置情報であるかを示す数である。
【0067】
また、図14に示すように、位置特定装置11は、第3の推定方法において、履歴データとして記憶される全ての位置情報を利用し、今回周期の携帯型端末器10の位置を推定する。すなわち、位置特定装置11は、携帯型端末器10の全ての位置P31〜P34を利用して、今回周期の携帯型端末器10の位置P30を推定する。
【0068】
この場合において位置特定装置11は、
V=((|P31−P32|)+(|P32−P33|)+(|P33−P34|))/(S・(tp31−tp34))
D(P31→P30)=D(P34→P33)+D(P33→P32)+D(P32→P31)
P30=P31+V・S・D(P31→P30)
なる演算式により、今回周期の携帯型端末器10の位置P30を推定する。ここで、Vは携帯型端末器10の推定速度であり、Sは位置の検出周期である。また、Dは携帯型端末器10の推定移動方向である。さらに、tは、何個目の位置情報であるかを示す数である。
【0069】
なお、図12〜図14に示す例では、位置情報が4つである場合を例に説明したが、これに限らず、位置情報は5つ以上であってもよい。また、位置特定装置11は、上記3つの推定方法を組み合わせて、今回周期の携帯型端末器10の位置を推定するようにしてもよい。
【0070】
図15は、図8に示した送信判定処理(S5)の詳細を示すフローチャートである。図15に示すように、通信装置12は、まず現在静止状態であるか否かを判断する(S51)。現在静止状態であると判断した場合(S51:YES)、通信装置12は、ステップS1において検出された位置情報の送信を中止する(S52)。その後、図15に示す処理は終了する。
【0071】
一方、現在静止状態であると判断した場合(S51:NO)、通信装置12は、現在通常状態であるか否かを判断する(S53)。現在通常状態であると判断した場合(S53:YES)、通信装置12は、現在静止中であるか否かを判断する(S54)。現在静止
中であると判断した場合(S54:YES)、通信装置12は、ステップS1において検出された位置情報の送信を中止する(S52)。その後、図15に示す処理は終了する。
【0072】
ところで、現在通常状態でないと判断した場合(S53:NO)、又は、現在静止中でないと判断した場合(S54:NO)、通信装置12は、ステップS1において検出された位置情報を送信する(S55)。その後、図15に示す処理は終了する。
【0073】
このようにして、本実施形態に係る携帯型端末器10によれば、予め予測されるGPSによる測位誤差から、携帯型端末器10が移動状態であるか静止状態であるかを判定するための判定領域Tを設定し、今回周期の位置が判定領域T内に存在する割合が所定割合より大きい場合、又は、所定回数連続して今回周期の位置が判定領域T内に存在すると判定された場合、携帯型端末器10が静止状態であると判断する。このように、判定領域Tを設定し、その領域T内に位置する割合又は連続性から携帯型端末器10が移動状態であるか静止状態であるかを判断するため、今回周期の1回だけなどのようにGPSの測位誤差によって静止状態であるにも拘わらず移動状態と判断される可能性が低減されることとなる。これにより、より精度良く静止状態を判断でき、無駄な通信を抑えることができる。従って、無駄な通信の頻度を低減して電力消費量を低減することができる。
【0074】
また、前回判断時に静止状態であると判断された場合に、今回周期の位置が判定領域T内に存在すると判定された割合が所定割合以下であるとき、又は、今回周期の位置が判定領域T内に存在することが、所定回数連続して判定されなかったときに、携帯型端末器10が移動状態であると判断する。このように、判定領域T内に位置する割合又は連続性から移動状態であるかを判断するため、今回周期の1回だけなどのようにGPSの測位誤差によって静止状態であるにも拘わらず移動状態と判断される可能性が低減されることとなる。これにより、より精度良く静止状態を判断でき、無駄な通信を抑えることができる。
【0075】
また、前回判断時に移動状態であると判断された場合に、今回周期の位置が判定領域T外に存在すると判定された割合が規定割合より大きいとき、又は、規定回数連続して今回周期の位置が判定領域T外に存在すると判定されたときに、携帯型端末器10が移動状態であると判断する。このように、前回判断時に移動状態である場合には、判定領域T外に位置する割合又は連続性から移動状態であるかを判断するため、判定領域T内でなく判定領域T外を基準に判断することとなり、携帯型端末器10が移動していることを、より確実に判断することができる。
【0076】
また、今回周期の位置が判定領域T外に存在すると判定された割合が規定割合以下であるとき、又は、今回周期の位置が判定領域T外に存在することが、規定回数連続して判定されなかったときに、携帯型端末器10が移動状態と静止状態との中間の状態を示す通常状態であると判断する。このため、確実に移動状態と判断できない場合には静止状態であると判断せず、移動状態と静止状態との中間の状態を示す通常状態であると判断しておくことで、誤判断の可能性を減じることができる。
【0077】
また、前回判断時に通常状態であると判断された場合に、今回周期の位置が判定領域内に存在すると判定された割合が所定割合より大きいとき、又は、所定回数連続して今回周期の位置が判定領域T内に存在すると判定されたときに、携帯型端末器10が静止状態であると判断する。このように、静止状態を判断することで、一度通常状態を経由した後に、判定領域T内に位置する割合又は連続性から静止状態を判断することとなり、より確実に静止状態を判断することができる。
【0078】
また、今回周期の位置が判定領域T外に存在する場合、移動中であると判断すると共に、今回周期の位置が判定領域T外に存在しない場合、静止中であると判断し、自己が通常
状態であると判断され、且つ、静止中であると判断されていたときに、検出された位置の情報について送信を中止する。このため、移動状態と静止状態との中間の状態を示す通常状態である場合であっても、今回周期の位置から静止中と判断できる場合、携帯型端末器10が移動している可能性は低く、位置の情報について送信を中止する。これにより、一層無駄な通信の頻度を低減して電力消費量を低減することができる。
【0079】
また、静止状態以外の状態と判断され、その後静止状態と判断された場合、設定している判定領域Tの位置を固定する。このため、例えば携帯型端末器10を所持した歩行者がゆっくり歩行するような場合、判定領域Tが固定されていることから、歩行者はいずれ判定領域T外に出ることとなり、移動状態と判断されることとなる。よって、判定領域Tを固定しないと常に静止状態と判断される可能性もあるが、判定領域Tを固定することにより、このような事態を防止して、移動状態の判断精度を向上させることができる。
【0080】
また、GPS衛星から受信する電波のレベルが規定値に満たない場合、履歴データとして保存される過去の位置から、今回周期の位置を推定するため、GPSによる位置検出が困難な場合に位置を推定することとなり、検出位置が欠損を防止することができる。
【0081】
以上、実施形態に基づき本発明を説明したが、本発明は上記実施形態に限られるものでは無く、本発明の趣旨を逸脱しない範囲で、変更を加えてもよいし、各実施形態を組み合わせるようにしてもよい。
【0082】
例えば、上記実施形態において、携帯型端末器10はサーバー装置20を介して車載端末器30と通信するが、これに限らず、携帯型端末器10が車載端末器30と直接通信するようにしてもよい。
【0083】
また、図3に示したように判定領域Tは円形のエリアであるが、円形に限らず、正方形や多角形など他の形状であってもよい。
【0084】
なお、上記実施形態において位置特定装置11が位置検出手段に該当し、通信装置12が通信手段に該当し、位置情報蓄積装置13が位置履歴保存手段に該当する。また、判定領域設定部14aが判定領域設定手段に該当し、位置判定部14bが位置判定手段に該当し、状態判断部14cが状態判断手段に該当する。さらに、第2状態判断部14dが第2状態判断手段に該当する。
【符号の説明】
【0085】
1…走行支援システム
10…携帯型端末器
11…位置特定装置(位置検出手段)
12…通信装置(通信手段)
13…位置情報蓄積装置(位置履歴保存手段)
14…処理装置
14a…判定領域設定部(判定領域設定手段)
14b…位置判定部(位置判定手段)
14c…状態判断部(状態判断手段)
14d…第2状態判断部(第2状態判断手段)
20…サーバー装置
21…通信装置
22…処理装置
30…車載端末器
31…位置特定装置
32…通信装置
33…処理装置
34…情報提供装置
T…判定領域
【特許請求の範囲】
【請求項1】
歩行者が携帯する携帯型端末器であって、
所定周期毎に自己位置を検出する位置検出手段と、
前記位置検出手段により検出された位置の情報を送信する通信手段と、
前記位置検出手段により検出された、今回周期の直前の所定数分の位置の情報を履歴データとして保存する位置履歴保存手段と、
前記位置履歴保存手段により保存された履歴データと予め予測されるグローバルポジショニングシステムによる測位誤差とに応じて、自己が移動状態であるか静止状態であるかを判定するための判定領域を設定する判定領域設定手段と、
前記位置検出手段により検出された今回周期の位置が前記判定領域設定手段により設定された判定領域内に存在するか否かを判定する位置判定手段と、
前記位置判定手段により前記今回周期の位置が前記判定領域内に存在すると判定された割合が所定割合より大きい場合、又は、前記位置判定手段により所定回数連続して前記今回周期の位置が前記判定領域内に存在すると判定された場合、自己が静止状態であると判断する状態判断手段と、を備え、
前記通信手段は、前記状態判断手段により静止状態であると判断された場合、前記位置検出手段により検出された位置の情報について送信を中止する
ことを特徴とする携帯型端末器。
【請求項2】
前記状態判断手段は、前回判断時に静止状態であると判断された場合に、前記位置判定手段により前記今回周期の位置が前記判定領域内に存在すると判定された割合が所定割合以下であるとき、又は、前記今回周期の位置が前記判定領域内に存在することが、前記位置判定手段により所定回数連続して判定されなかったときに、自己が移動状態であると判断する
ことを特徴とする請求項1に記載の携帯型端末器。
【請求項3】
前記状態判断手段は、前回判断時に移動状態であると判断された場合に、前記位置判定手段により前記今回周期の位置が前記判定領域外に存在すると判定された割合が規定割合より大きいとき、又は、前記位置判定手段により規定回数連続して前記今回周期の位置が前記判定領域外に存在すると判定されたときに、自己が移動状態であると判断する
ことを特徴とする請求項1又は請求項2のいずれかに記載の携帯型端末器。
【請求項4】
前記状態判断手段は、前回判断時に移動状態であると判断された場合に、前記位置判定手段により前記今回周期の位置が前記判定領域外に存在すると判定された割合が規定割合以下であるとき、又は、前記今回周期の位置が前記判定領域外に存在することが、前記位置判定手段により規定回数連続して判定されなかったときに、自己が移動状態と静止状態との中間の状態を示す通常状態であると判断する
ことを特徴とする請求項1から請求項3のいずれか1項に記載の携帯型端末器。
【請求項5】
前記状態判断手段は、前回判断時に通常状態であると判断された場合に、前記位置判定手段により前記今回周期の位置が前記判定領域内に存在すると判定された割合が所定割合より大きいとき、又は、前記位置判定手段により所定回数連続して前記今回周期の位置が前記判定領域内に存在すると判定されたときに、自己が静止状態であると判断する
ことを特徴とする請求項5に記載の携帯型端末器。
【請求項6】
前記位置判定手段により前記今回周期の位置が前記判定領域外に存在する場合、移動中であると判断すると共に、前記今回周期の位置が前記判定領域外に存在しない場合、静止中であると判断する第2状態判断手段をさらに備え、
前記通信手段は、前記状態判断手段により自己が通常状態であると判断され、且つ、前
記第2状態判断手段により静止中であると判断されていたときに、前記位置検出手段により検出された位置の情報について送信を中止する
ことを特徴とする請求項4又は請求項5のいずれかに記載の携帯型端末器。
【請求項7】
前記判定領域設定手段は、前記状態判断手段により静止状態以外の状態と判断され、その後静止状態と判断された場合、設定している判定領域の位置を固定する
ことを特徴とする請求項1から請求項6のいずれか1項に記載の携帯型端末器。
【請求項8】
前記位置検出手段は、グローバルポジショニングシステムの衛星から受信する電波のレベルが規定値に満たない場合、前記履歴データとして保存される過去の位置から、今回周期の位置を推定する
ことを特徴とする請求項1から請求項7のいずれか1項に記載の携帯型端末器。
【請求項9】
歩行者が携帯する携帯型端末器の通信制御方法であって、
所定周期毎うち今回周期の直前の所定数分の位置の情報が保存された履歴データと予め予測されるグローバルポジショニングシステムによる測位誤差とに応じて、自己が移動状態であるか静止状態であるかを判定するための判定領域を設定する判定領域設定工程と、
検出された今回周期の位置が前記判定領域設定工程において設定された判定領域内に存在するか否かを判定する位置判定工程と、
前記位置判定工程において前記今回周期の位置が前記判定領域内に存在すると判定された割合が所定割合より大きい場合、又は、前記位置判定工程において所定回数連続して前記今回周期の位置が前記判定領域内に存在すると判定された場合、前記携帯型端末器が静止状態であると判断する状態判断工程と、
前記状態判断工程において静止状態であると判断された場合、検出された位置の情報について送信を中止する送信中止工程と、
を有することを特徴とする携帯型端末器の通信制御方法。
【請求項1】
歩行者が携帯する携帯型端末器であって、
所定周期毎に自己位置を検出する位置検出手段と、
前記位置検出手段により検出された位置の情報を送信する通信手段と、
前記位置検出手段により検出された、今回周期の直前の所定数分の位置の情報を履歴データとして保存する位置履歴保存手段と、
前記位置履歴保存手段により保存された履歴データと予め予測されるグローバルポジショニングシステムによる測位誤差とに応じて、自己が移動状態であるか静止状態であるかを判定するための判定領域を設定する判定領域設定手段と、
前記位置検出手段により検出された今回周期の位置が前記判定領域設定手段により設定された判定領域内に存在するか否かを判定する位置判定手段と、
前記位置判定手段により前記今回周期の位置が前記判定領域内に存在すると判定された割合が所定割合より大きい場合、又は、前記位置判定手段により所定回数連続して前記今回周期の位置が前記判定領域内に存在すると判定された場合、自己が静止状態であると判断する状態判断手段と、を備え、
前記通信手段は、前記状態判断手段により静止状態であると判断された場合、前記位置検出手段により検出された位置の情報について送信を中止する
ことを特徴とする携帯型端末器。
【請求項2】
前記状態判断手段は、前回判断時に静止状態であると判断された場合に、前記位置判定手段により前記今回周期の位置が前記判定領域内に存在すると判定された割合が所定割合以下であるとき、又は、前記今回周期の位置が前記判定領域内に存在することが、前記位置判定手段により所定回数連続して判定されなかったときに、自己が移動状態であると判断する
ことを特徴とする請求項1に記載の携帯型端末器。
【請求項3】
前記状態判断手段は、前回判断時に移動状態であると判断された場合に、前記位置判定手段により前記今回周期の位置が前記判定領域外に存在すると判定された割合が規定割合より大きいとき、又は、前記位置判定手段により規定回数連続して前記今回周期の位置が前記判定領域外に存在すると判定されたときに、自己が移動状態であると判断する
ことを特徴とする請求項1又は請求項2のいずれかに記載の携帯型端末器。
【請求項4】
前記状態判断手段は、前回判断時に移動状態であると判断された場合に、前記位置判定手段により前記今回周期の位置が前記判定領域外に存在すると判定された割合が規定割合以下であるとき、又は、前記今回周期の位置が前記判定領域外に存在することが、前記位置判定手段により規定回数連続して判定されなかったときに、自己が移動状態と静止状態との中間の状態を示す通常状態であると判断する
ことを特徴とする請求項1から請求項3のいずれか1項に記載の携帯型端末器。
【請求項5】
前記状態判断手段は、前回判断時に通常状態であると判断された場合に、前記位置判定手段により前記今回周期の位置が前記判定領域内に存在すると判定された割合が所定割合より大きいとき、又は、前記位置判定手段により所定回数連続して前記今回周期の位置が前記判定領域内に存在すると判定されたときに、自己が静止状態であると判断する
ことを特徴とする請求項5に記載の携帯型端末器。
【請求項6】
前記位置判定手段により前記今回周期の位置が前記判定領域外に存在する場合、移動中であると判断すると共に、前記今回周期の位置が前記判定領域外に存在しない場合、静止中であると判断する第2状態判断手段をさらに備え、
前記通信手段は、前記状態判断手段により自己が通常状態であると判断され、且つ、前
記第2状態判断手段により静止中であると判断されていたときに、前記位置検出手段により検出された位置の情報について送信を中止する
ことを特徴とする請求項4又は請求項5のいずれかに記載の携帯型端末器。
【請求項7】
前記判定領域設定手段は、前記状態判断手段により静止状態以外の状態と判断され、その後静止状態と判断された場合、設定している判定領域の位置を固定する
ことを特徴とする請求項1から請求項6のいずれか1項に記載の携帯型端末器。
【請求項8】
前記位置検出手段は、グローバルポジショニングシステムの衛星から受信する電波のレベルが規定値に満たない場合、前記履歴データとして保存される過去の位置から、今回周期の位置を推定する
ことを特徴とする請求項1から請求項7のいずれか1項に記載の携帯型端末器。
【請求項9】
歩行者が携帯する携帯型端末器の通信制御方法であって、
所定周期毎うち今回周期の直前の所定数分の位置の情報が保存された履歴データと予め予測されるグローバルポジショニングシステムによる測位誤差とに応じて、自己が移動状態であるか静止状態であるかを判定するための判定領域を設定する判定領域設定工程と、
検出された今回周期の位置が前記判定領域設定工程において設定された判定領域内に存在するか否かを判定する位置判定工程と、
前記位置判定工程において前記今回周期の位置が前記判定領域内に存在すると判定された割合が所定割合より大きい場合、又は、前記位置判定工程において所定回数連続して前記今回周期の位置が前記判定領域内に存在すると判定された場合、前記携帯型端末器が静止状態であると判断する状態判断工程と、
前記状態判断工程において静止状態であると判断された場合、検出された位置の情報について送信を中止する送信中止工程と、
を有することを特徴とする携帯型端末器の通信制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2011−227763(P2011−227763A)
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願番号】特願2010−97942(P2010−97942)
【出願日】平成22年4月21日(2010.4.21)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願日】平成22年4月21日(2010.4.21)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]