
携帯型行程スケジュール管理装置
【課題】簡素な構成で安価な携帯型行程スケジュール管理装置を提供する
【解決手段】出発地点と経由地点と目的地点のそれぞれの到着予定時刻を対応付けした基準スケジュール情報60bを含む情報を記憶する記憶部34と、利用者入力を受け付ける操作入力部5と、表示器4と、前記スケジュール情報に含まれるいずれかの地点を現在地点として指示する旨の利用者入力に応動して、前記基準スケジュール情報に含まれる前記現在地点の到着予定時刻と、現在時刻との差に基づいて、前記各地点の到着予定時刻を変更した最新スケジュール情報70を生成して記憶部に記憶する処理と、前記基準スケジュール情報と前記最新スケジュール情報の内容を前記表示器に表示する処理を実行する制御部20を備えている。
【解決手段】出発地点と経由地点と目的地点のそれぞれの到着予定時刻を対応付けした基準スケジュール情報60bを含む情報を記憶する記憶部34と、利用者入力を受け付ける操作入力部5と、表示器4と、前記スケジュール情報に含まれるいずれかの地点を現在地点として指示する旨の利用者入力に応動して、前記基準スケジュール情報に含まれる前記現在地点の到着予定時刻と、現在時刻との差に基づいて、前記各地点の到着予定時刻を変更した最新スケジュール情報70を生成して記憶部に記憶する処理と、前記基準スケジュール情報と前記最新スケジュール情報の内容を前記表示器に表示する処理を実行する制御部20を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、登山やトレッキングなどの行程スケジュールを管理するための携帯型行程スケジュール管理装置に関する。
【背景技術】
【0002】
登山やトレッキングをする前に何らかのスケジュールを立てることは珍しくない。高山や尾根の縦走など、行程が長時間にわたれば、登山者自身の体力に見合った、より緻密なスケジュールを立てる必要がある。そして、登山を開始してからは、作成したスケジュールと実際の行程とを比較し、ある経由地点で時間の遅れがあれば、次の経由地点までの歩速を速くするなどして、目的とする時刻(例えば、日没時刻など)までに目的の場所に到着するように調整する。なお、以下の特許文献1には、GPSを用いて利用者の行動スケジュールを管理するための携帯端末について記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−283786号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1に記載の技術は、GPS信号の受信機能を搭載し、あらかじめ作成した行程スケジュールに対し、目的地や経由地への到着時刻が予定通りであったかどうかを確認することができるようになっている。しかし、GPS受信機能を搭載しているため、装置自体が高価なものとなる。また、小型・軽量化にも限界がある。型化を達成したとしても、情報の表示面積が相対的に少なくなり、GPSによって正確な相対位置情報を得られても、それに見合う十分な情報を表示することができなくなる。操作キーやボタンの数も限られ、複雑な操作が困難となる。
【0005】
本発明は、必要十分な機能を備えるとともに、簡素な構成で安価な携帯型行程スケジュール管理装置を提供することを目的としている。なお、その他の目的については、以下の記載で明らかにする。
【課題を解決するための手段】
【0006】
上記目的を達成するための主たる発明は、時計機能を備えて、出発地点から目的地までの行程スケジュールを管理するための携帯型行程スケジュール管理装置であって、
出発地点と経由地点と目的地点のそれぞれの到着予定時刻を対応付けした基準スケジュール情報を含む情報を記憶する記憶部と、
利用者入力を受け付ける操作入力部と、
表示器と、
最新スケジュール生成処理と、スケジュール表示処理とを実行する制御部と、
を備え、
前記最新スケジュール生成処理は、前記スケジュール情報に含まれるいずれかの地点を現在地点として指示する旨の利用者入力に応動して、前記基準スケジュール情報に含まれる前記現在地点の到着予定時刻と、現在時刻との差に基づいて、前記各地点の到着予定時刻を変更した最新スケジュール情報を生成して記憶部に記憶し、
前記スケジュール表示処理は、前記基準スケジュール情報と前記最新スケジュール情報の内容を前記表示器に表示する、
ことを特徴としている。
【図面の簡単な説明】
【0007】
【図1】本発明の携帯型行程スケジュール管理装置の一実施形態であるリスト・コンピュータを示す図である。
【図2】上記リスト・コンピュータの液晶表示器に配設されているパターンを示す図である。
【図3】上記リスト・コンピュータの機能ブロック構成を示す図である。
【図4】上記リスト・コンピュータをクレイドルに接続した状態を示す図(A)と、クレイドルの内部回路の概略図(B)である。
【図5】上記リスト・コンピュータに記憶されている基準スケジュール情報のデータ構造を示す図である。
【図6】上記リスト・コンピュータに対して出発地点を指示する現在地点入力操作を行った際のLCDの表示状態を示す図である。
【図7】到着予定時刻が付記された基準スケジュール情報のデータ構造を示す図である。
【図8】上記リスト・コンピュータに対して第1の経由地点を指示する現在地点入力操作を行った際のLCDの表示状態を示す図である。
【図9】上記リスト・コンピュータにて生成される最新スケジュール情報のデータ構造を示す図である。
【図10】上記LCDにて第1の経由地点に関する情報が表示されている状態を示す図である。
【図11】上記リスト・コンピュータに対して第2の経由地点を指示する現在地点入力操作を行った際のLCDの表示状態を示す図である。
【図12】更新後の上記最新スケジュール情報のデータ構造を示す図である。
【図13】上記LCDにて第2の経由地点に関する情報が表示されている状態を示す図である。
【図14】上記基準スケジュール情報の変更例(A)と、上記最新スケジュール情報の変更例(B)を示す図である。
【図15】上記リスト・コンピュータにおける地点到着予報機能に関わる情報処理の流れを示す図である。
【図16】地点到着予報機能に関わる情報がLCDに表示されている状態を示す図である。
【図17】上記地点到着予報機能に関わる情報処理の変更例を示す図である。
【発明を実施するための形態】
【0008】
===本発明の特徴===
本発明の携帯型行程スケジュール管理装置は、登山やトレッキング、ハイキングなどに行く利用者が携帯し、実際の行程が、事前に計画したスケジュール(基準スケジュール)通りに進んでいるかどうかを確認するための情報処理装置である。基準スケジュールは、出発地や目的地の出発時間と到着予定時刻、目的地までの経由地点の到着時刻などを記述したものである。利用者は、行程中、基準スケジュールをこの装置に表示させ、各経由地点の到着時間と実際の到着時間を逐次確認し、歩速を早めたり休憩を取ったりする。
【0009】
また、実際に登山を開始すると、特に初心者であれば、歩くことに夢中になり、各経由地点での確認を怠ったり、忘れたりして、基準スケジュールと現状との整合度を確認することができなくなり、結果的に、行程が大幅に遅れる可能性がある。例えば、日没までにその日の行程を終える予定が狂えば、事故に遭遇する可能性も十分にあり得る。そこで、利用者が各経由地点で基準スケジュールと実際の行程との差を必ず確認させることも必要である。さらに、GPS受信機能などの高価で複雑な機能を搭載せず、必要十分の情報量で、現状を確認でき、しかも省電力で軽量・小型化であることが望まれる。本発明は、このようなことを考えながら創作したものである。
【0010】
そして本発明は、上記主たる発明として記載した携帯型行程スケジュール管理装置に加え、以下の特徴を備えた携帯型行程スケジュール管理装置にも及んでいる。
【0011】
前記制御部は、前記最新スケジュール情報に含まれる前記現在地点の次の地点の到着予定時刻の所定時間前になると、その旨を利用者に報知する地点到着予報処理を実行すること。
【0012】
歩行に伴う振動を検出するセンサを備え、
前記記憶部は、利用者の歩幅を記憶し、
前記基準スケジュール情報は、各地点間の距離情報を含み、
前記制御部は、前記センサが検出した振動に基づいて歩数を計数するとともに、当該歩数に前記歩幅を乗算して歩行距離を計算する距離測定処理と、当該距離測定処理により測定した前記現在地点からの歩行距離と、前記基準スケジュール情報に含まれる当該現在地点と次の地点との地点間距離との差が所定範囲内になると、その旨を利用者に報知する地点到着予報処理とを実行すること。
【0013】
気圧センサを備え、
前記基準スケジュール情報は、各地点の標高情報を含み、
前記制御部は、気圧センサからの気圧データに基づいて高度を計算する高度計算処理と、当該高度計算処理により計算した高度と、基準スケジュール情報に含まれる前記現在地点の次の地点の標高との差が所定の範囲内になると、その旨を利用者に報知する地点到着予報処理とを実行すること。
【0014】
気圧センサを備え、
前記基準スケジュール情報は、各地点の標高情報を含み、
前記制御部は、気圧センサからの気圧データに基づいて前記現在地点の高度を基準とした高度差を計算する高度計算処理と、前記基準スケジュール情報に含まれる前記現在地点の次の地点の標高差と、前記高度計算処理により計算した高度差との差が所定の範囲内になると、その旨を利用者に報知する地点到着予報処理を実行すること。
【0015】
気圧センサを備えた携帯型行程スケジュール管理装置において、前記現在地点として指示する旨の利用者入力に応動して、当該現在地点の高度を、前記スケジュール情報に含まれる当該地点の前記標高情報と同じ値に補正すること。
【0016】
上記前記制御部は、基準スケジュール情報に基づいて所定時間あたりの移動距離を計算するとともに、当該移動距離を前記所定範囲内の差に対応する数値とすること。
【0017】
===装置の基本的な構成===
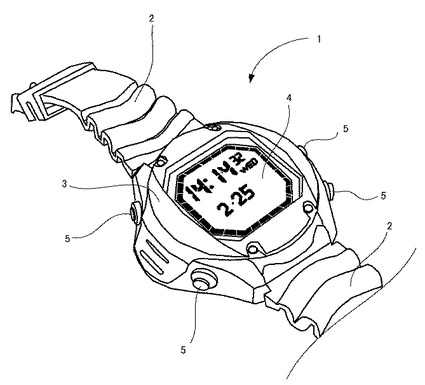
図1は、本発明の実施例における携帯型行程スケジュール管理装置の外観図である。当該携帯型行程スケジュール管理装置1は、腕に装着するためのバンド2を備えた腕時計型であり、基本的な構造や構成は、ケース3の前面に液晶表示器(LCD)4を文字盤として備えたデジタル式腕時計と同様である。そして、ケース3の側面には、この携帯型行程スケジュール管理装置(以下、リスト・コンピュータ)1を操作するための複数のボタン5が配設されている。
【0018】
図2に、LCD4の表示パターンを示した。特定の文字や図形を専用に表示するためのアイコン用パターン41と、数字を表示するための7セグメントパターン42、テキストや図形をビットマップ表示するための大小2つのドットマトリクスパターン(43a,43b)が配設されている。
【0019】
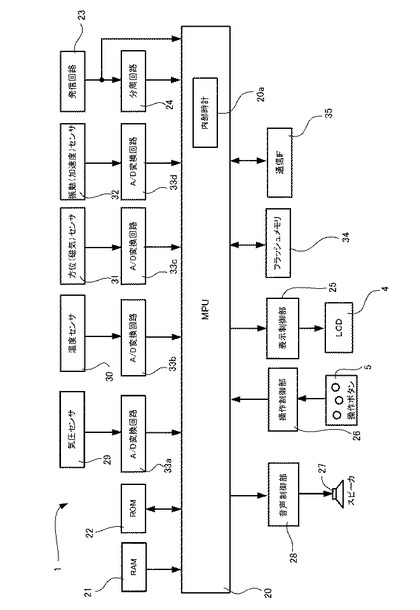
図3に、上記リスト・コンピュータ1の機能ブロック構成を示した。リスト・コンピュータのハードウエア構成は、各種センサ(29〜32)を搭載して、温度、気圧や標高、方位などの情報を表示する、いわゆる「アウトドア・ウオッチ」と呼ばれる腕時計と同様である。MPU20、RAM21、ROM22からなるコンピュータ本体をコントローラとし、ROM22にはMPU20によって実行される各種プログラムやフォントデータが記憶されている。また、外部記憶としてフラッシュメモリ34を内蔵している。
【0020】
発振回路23と分周回路24は、各種周波数のクロックを発生させる回路であり、MPU20を動作させるための基準クロックや時刻表示やストップウオッチなどの計時機能に関わるクロックを発生する。表示制御部25は、MPU20からの指示に従って各種情報をLCD4に表示し、操作制御部26は、操作ボタン5からの操作信号をMPU20に入力する。音声制御部28は、MPU20からの指示に従ってスピーカ27を駆動し、アラーム音など音声出力させる。
【0021】
さらに、アウトドアでの用途を想定した様々な情報を利用者に提供するための機能(アウトドア機能)を実現するために、気圧センサ29、温度センサ30、方位センサ31に加え、歩行に伴う振動を検出するためのセンサ32を備えている。本実施例では加速度センサ32を採用している。そして、各センサ(29〜32)が出力する信号は、それぞれのセンサ(29〜32)に対応するA/D変換回路(33a〜33d)にて各種デジタルータ(気圧データ、温度データ、方位データ、振動データ)に変換されてMPU20に入力される。
【0022】
MPU20は、操作制御部26からの操作信号に応動してROM22に記憶されている所定のプログラムを実行し、そのプログラムの実行結果などをRAM21に書込んだり、その書き込んだデータをRAM21から読み出したりする。MPU20は、各センサ(29〜32)に接続されているA/D変換回路(33a〜33d)からの各種データについても、サンプリング機会ごとに更新しながらRAM21に読み出し可能にして格納する。
【0023】
さらに、格納した各種データ基づいて所用の情報を随時生成してRAM21に格納する。例えば、あらかじめ記憶されている気圧と高度との関係から気圧センサ29からの気圧データに基づいて高度を計算し、その計算結果を格納する。
【0024】
また、リスト・コンピュータ1は、歩数計機能を備え、利用者入力された歩幅をフラッシュメモリ34に記憶し、MPU20が、加速度センサ32からの振動データを解析して歩行に伴う振動を抽出するとともに、その振動に基づいて歩数を計数したり、その歩数に歩幅を乗算して歩行距離を計算したりする。そして、利用者が所定の操作入力を行った時点を起点とした歩行距離を計算し、その計算結果を更新しながらRAM21に格納していく。
【0025】
さらにリスト・コンピュータ1は、パーソナルコンピュータ(PC)などの外部の情報処理装置と通信する機能を備え、そのための構成として、通信インタフェース(IF)35を備えている。MPU20は、この通信IF35を介して、情報処理装置に各種データを転送したり、情報処理装置から各種データを受け取ったりする。
【0026】
なお、通信IF35と外部の情報処理装置とは、直接接続される形態である場合もあるし、クレイドルと呼ばれる中間装置を介して接続される形態である場合もある。本実施例では、通信IF35は、電波や赤外線などを用いた無線信号によりクレイドルと通信する。
【0027】
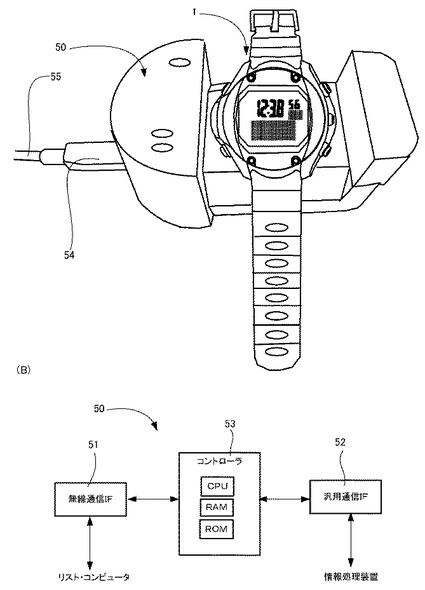
図4の(A)と(B)に、クレイドル50に装着された状態のリスト・コンピュータ1と、クレイドル50の内部回路の概略構成とを示した。クレイドル50は、無線信号によりリスト・コンピュータ1の通信IF35と通信するための無線通信IF51と、情報処理装置と汎用の通信規格に準じたプロトコルで通信するための汎用通信IF52とを備え、CPU、RAM、ROMを備えたコントローラ53は、双方の通信IF(41,42)を介して送受信されるプロトコルの異なる信号を解釈して相互変換する。なお、クレイドル50と情報処理装置とは、例えば、USB規格に準じたコネクタ54を両端に備えたケーブル55を介して接続される。このような構成により、リスト・コンピュータ1のMPU20は、通信IF35を介して間接的に外部の情報処理装置と通信する。そして、MPU20は、通信IF35を介して外部の情報処理装置から転送されてきたデータをフラッシュメモリ34に格納したり、フラッシュメモリ34内のデータを外部の情報通信装置に転送したりする。
【0028】
上記構成を備えたリスト・コンピュータ1は、MPU20の制御により、アウトドア機能や時計機能に関わる情報、受信したデータ、情報処理の実行結果などをLCD4に表示したり、アラーム音をスピーカ27から出力したりする。
【0029】
さらに、リスト・コンピュータ1は、利用者が事前に作成した登山やトレッキングのスケジュールについての情報(基準スケジュール情報)を記憶し、実際の行程と比較しながらスケジュールを随時最新のものに更新し、その最新スケジュールの内容を利用者に提示するスケジュール管理機能を備えている。しかも、本実施例のスケジュール管理機能によれば、基準スケジュールと実際の行程との差を確実に確認させて、利用者が安全に登山やトレッキングを遂行できるように支援する機能も備えている。
【0030】
===基準スケジュール情報===
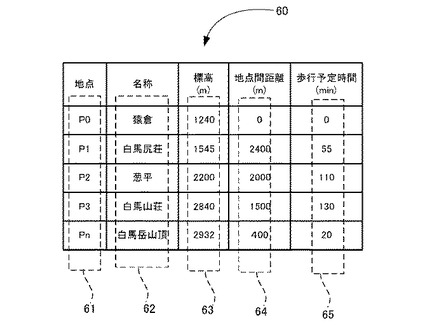
フラッシュメモリ34には、スケジュール管理機能を実現させるための情報として、基準スケジュール情報が記憶さている。図5に当該基準スケジュール情報60のデータ構造を示した。本実施例では、出発地点P0と目的地点Pnの途上に複数の経由地点Pk(k=1,2,3…,n−1)が設定されている。この図では、登山のスケジュールが示されており、各地点61についての情報として、名称62と標高63が含まれているとともに、各地点間の各地点間の距離64や歩行予定時間65も記述されている。例えば、P0とP1とは、2400mの距離(地点間距離)があり、その歩行予定時間は55分となっている。
【0031】
もちろん、基準スケジュール情報60のデータの構造や記述内容は、適宜に変更可能である。例えば、地点間距離64は、出発地点P0からの距離で記述してもよいし、歩行予定時間65に加え、各地点61における休憩時間を記述してもよい。地点間の歩行予定時間65に代えて、出発地点P0からの累積歩行予定時間を記述したり、各地点61の出発予定時刻や到着予定時刻を記述したりすることも可能である。少なくとも、各地点間の距離64が特定できるとともに、出発地点P0の出発予定時刻、あるいは実際の出発時刻を特定した段階で、以後の各地点61の到着予定時刻が特定できるようなデータ構造であればよい。
【0032】
===基準スケジュール情報の入力===
図5に示した基準スケジュール情報は、リスト・コンピュータ1に当初から記憶させておくことも考えられる。また、手間が掛かるが、操作ボタン5により、テキストや数値入力をすることも可能である。しかし、本実施例では、リスト・コンピュータ1が標準で備える通信機能を使って基準スケジュール情報60を外部の情報処理装置から入力することとしている。
【0033】
例えば、PCを情報処理装置として、そのPCに基準スケジュール情報60を編集するためのソフトウエアをインストールさせておく、利用者はPCを使って基準スケジュール情報60を編集し、所定形式のファイルに作成する。そして、そのファイルをフラッシュメモリ34に転送し記憶させる。MPU20は、所定形式のファイルを基準スケジュール情報60として認識する。
【0034】
あるいは、Webサーバー上に基準スケジュール情報60をダウンロード可能に用意しておいてもよい。この場合、PCはブラウザを実装しているだけでよく、基準スケジュール情報60の編集ソフトウエアをインストールする必要がない。
【0035】
===基準スケジュールの設定===
基準スケジュール情報60の内容を実際の行程における時刻に対応させるためには、まず、各地点61の到着予定時刻を規定する必要がある。本実施例では、基準スケジュール情報60には到着予定時刻が記載されていないため、実際の出発時刻と各地点間の歩行予定時間65とに基づいて、基準ケジュール情報60に各地点の到着予定時刻を付記することとしている。
【0036】
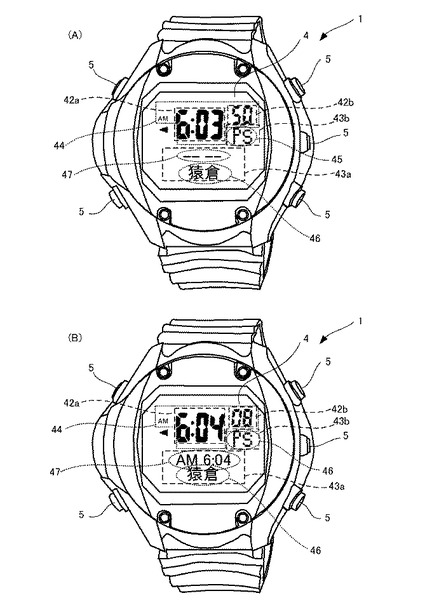
この到着予定時刻を当初の基準スケジュール情報60に付記するために、利用者は、出発地点において、所定の操作入力を行い、現在地点が出発地点P0である旨を指示する操作を行う。図6に出発地点の指示入力に伴うLCD4の表示状態の遷移を示した。基本的な表示状態である時刻表示状態(A)において、各種機能に対応する画面を呼び出すための所定の操作ボタン5を押して、スケジュール管理機能に関わる画面(スケジュール管理画面)を表示させる。なお、この表示状態において、他のボタン5を押すと、スケジュールに関わる各種情報(現在地点、次の地点、次の地点の到着予定時刻や到着までの時間、距離、標高など)を順次呼び出して表示させることができる。また、所定のボタン5に対する操作により、スケジュール管理機能に関わる各種情報を入力することもできる。
【0037】
MPU20は、スケジュール管理画面を表示する際、出発地点P0の情報を表示し、所定の操作入力を受け付けるごとに、順次P1、P2・・・と地点を進め、各地点についての情報を表示する。ここでは、出発地点P0の情報を表示させると、現在時刻44が時刻表示用の7セグメントパターン(42a,42b)に表示されている状態で、出発地点である旨の「P0」45が小さな表示面積の方のドットマトリクスパターン領域(副ドットパターン領域)43bに表示され、名称46が大きい方のドットマトリクスパターン領域(主ドットパターン領域)43aに表示される。なお、現在地点の指示入力があるまでは、出発時間47が未入力状態「−− −−」となっている。
【0038】
利用者は、出発に際して所定のボタン5を押して現在地点が出発地点P0であることを指示すると、MPU20は、当該入力時点の時刻をRAM32に記憶するなどして取得するとともに、この出発時刻47を主ドットパターン領域43aの名称46の上に表示する(B)。
【0039】
また、基準スケジュール情報60に含まれる各地点間の歩行予定時間65に従って、各地点への到着予定時刻を計算し、各地点に到着予定時刻を対応付けして基準スケジュール情報を更新し、この更新した基本スケジュール情報をフラッシュメモリ34に記憶する。図7に到着予定時刻66が付記された基準スケジュール情報60bのデータ構造を示した。
【0040】
===最新スケジュール情報の生成===
MPU20は、利用者が出発地点P0の場合と同様にして、各地点61でその地点に到着した旨の指示入力(現在地点入力)を行うことで、行程中、現在の位置が基準スケジュール情報60bに記載されているどの地点とどの地点の間なのかを認識する。すなわち、利用者が特定の地点をスケジュール管理画面に表示させ、その地点を現在地点であると指示すると、MPU20は、その地点を到着済みのフラグを立てる。そして、ある連続する2地点が到着済みと未到着であれば、現在位置がその2地点の間であること特定することができる。
【0041】
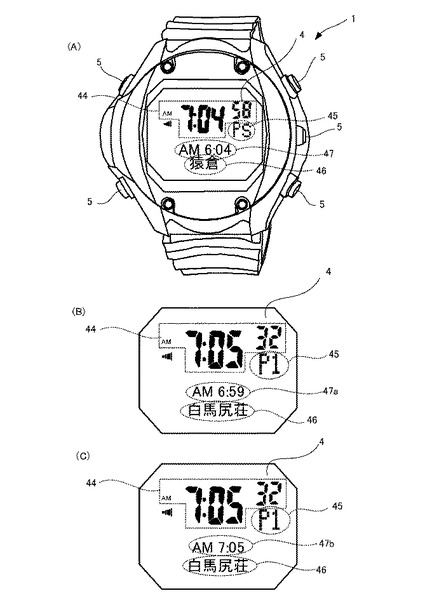
MPU20は、各地点にて現在地点入力を受け付けると、その都度、基準スケジュール情報60bの内容を実際の行程に応じて変更した最新のスケジュール情報を生成する。図8(A)〜(C)にこの最新スケジュールの生成過程でLCD4に表示される画面の遷移を示した。利用者は、出発地点P0から歩き始めて最初の経由地点P1に来たら、リスト・コンピュータ1を操作してスケジュール管理画面を呼び出す。呼び出した画面には、現在時刻44が表示された状態で、出発地点「P0」表示45と、その名称46と、先に出発地点P0で入力した出発時刻47とが表示されている(A)。ここで、所定の操作入力を行って、最初の経由地点P1の情報を表示させる(B)。この表示画面には、最初の経由地点である「P1」45と、その名称46が表示されているとともに、到着予定時刻が付記された基準スケジュール情報60bに記載されている当該P1への到着予定時刻47aが表示されている。この状態で利用者は同じ画面に表示されている現在時刻44から、当初の予定到着時間との差を確認することができる。そして、所定のボタン5を押して経由地点P1である旨の現在地点入力を行うと、MPU20は、この入力時刻を取得し、到着予定時刻に代えて実際に到着した時刻47bを表示し(C)、この時刻47bと基準スケジュール情報60bに含まれている各地点間の歩行予定時間65とに基づいて、次の経由地点P2以降の各地点61の到着予定時刻を計算し、その到着予定時刻66を各地点61に対応付けした最新スケジュール情報を生成する。
【0042】
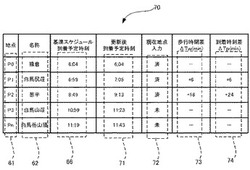
図9に生成された最新スケジュール情報70の概略を示した。この例では、基準スケジュール情報60bに含まれる地点間の歩行予定時間65と実際に掛かった時間との差ΔTw73や、当該経由地点P1の到着予定時刻との時間差ΔTp74を計算し、これらの時間差(ΔTw73,ΔTp74)も最新スケジュール情報70に含める。また、地点P1について、現在地点入力した旨の「済」のフラグを立てる。
【0043】
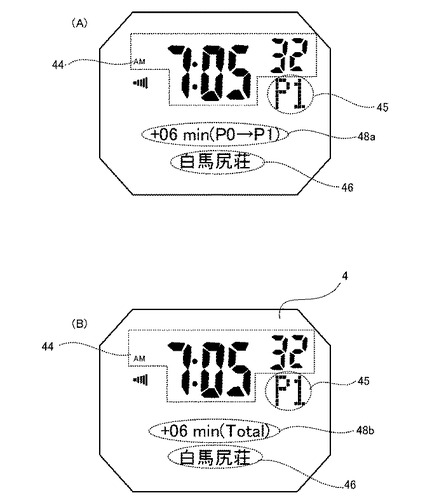
これら最新スケジュール情報の内容は、利用者による所定の操作入力に従って、適宜にスケジュール管理画面に表示させることができる。図10に、上記各時間差(ΔTw,ΔTp)の表示例を示した。ここでは、最初の経由地点P1が指示された段階なので、ΔTw(48a)を表示した状態(A)とΔTp(48b)を表示した状態(B)では、ともに同じ時間差が表示されている。
【0044】
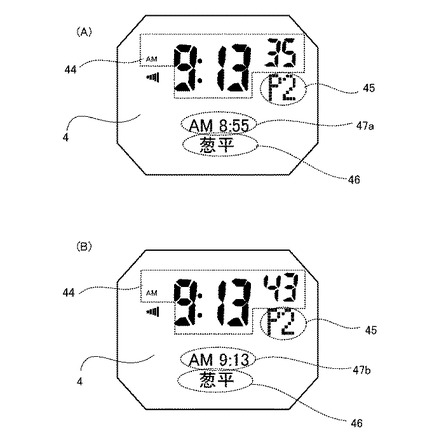
利用者は、次の経由地点P2でも、経由地点P1での操作と同様の操作を行い、P2の到着予定時刻を名称とともに表示させる。図11(A)(B)に2番目の経由地点P2を現在地点入力したときのLCD4の表示状態の遷移を示した。経由地点P2についての情報を最初に表示させた状態(A)では、到着予定時刻47aは、先の経由地点P1の現在地点入力がなされた時点で生成された最新スケジュール情報70に記載されている経由地点P2に対応する到着予定時刻47aであり、利用者は、同じ画面に表示されている到着予定時刻47aと現在時刻44とを比較することで、地点間の歩行予定時間と実際の歩行時間との差を確認することができる。そして、現在地点がP2である旨の現在地点入力操作を行うと、この入力時点の時刻を実際の経由地点P2の到着時刻として以後の地点における到着予定時刻を計算して最新スケジュール情報を更新する。また、当該指示時刻47bをP2の名称46とともに表示する(B)。
【0045】
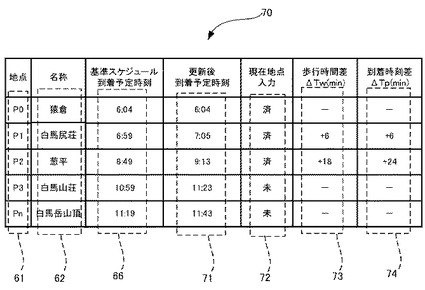
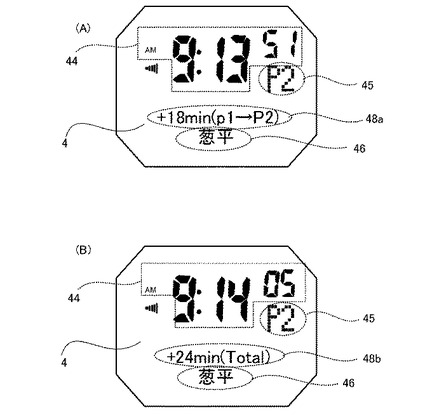
図12に、経由地点P2点にて更新された最新スケジュール情報の概略を示した。経由地点P2に対応する歩行予定時間と実際の歩行時間との差ΔTw、および基準スケジュール情報における到着予定時刻との差ΔTpが付記されている。そして、利用者が所定の操作を行うと、MPU20は、これらの時間差(ΔTw,ΔTp)を取得して、図13に示すように、P1、P2間の歩行予定時間との具体的な差ΔTwを表示したり(A)、基準スケジュール情報における到着予定時刻との差ΔTpを表示したりする(B)。
【0046】
===最新スケジュール情報の変形例===
基準スケジュール情報に当初から到着予定時刻が含まれている場合、当初の基準スケジュール情報と、実際の出発時刻に基づいて各地点の到着予定時刻を変更した最初の最新スケジュール情報とを上書き禁止とし、以後、各経由地点では、実際の到着時刻との比較対象として、基準スケジュール情報と最初の最新スケジュール情報のいずれかを選択可能にして表示するようにしてもよい。それによって利用者は、スケジュールと現状との差を時刻と地点間の歩行予定時間いずれかを基準にして確認することができる。
【0047】
図14の(A)と(B)に、それぞれ、当初の基準スケジュール情報60cと最初の最新スケジュール情報70bとを例示した。例えば、目的地点おいて、帰りのバスの発車時刻が決まっている場合などでは、基準スケジュール情報60cと現状とを比較することが想定される。目的地点と経由地点の双方に宿泊所がある場合に、日没までに到着可能な地点を予測して宿泊所を決定する場合では、最初の最新スケジュール情報70bにおける到着予定時刻71bと現状とを比較することが想定される。
【0048】
===経由地点到着予報機能===
以上、行程スケジュール管理機能の基本的な情報処理や操作手順について説明した。しかし、この基本的な情報処理は、利用者が各経由地点で確実に現在地点を指示する操作を行うことを前提としている。すなわち、利用者が確実に各地点で現在地点を指示する操作を行わないと、基準のスケジュールと現状との差を正しく提示することができない。そこで、本実施例のリスト・コンピュータ1は、各地点で確実に現在地点入力操作を行わせるように、各地点に近づくと、その旨を報知する経由地点到着予報機能も備えている。本実施例では、リスト・コンピュータ1が備える時計機能と、アウトドア機能とにより、上記経由地点到着予報機能を実現している。
【0049】
図15に上記地点到着予報機能に関わる情報処理の流れを示した。予報を出力するタイミングを決定するために所定の範囲を定義した数値である、時間差t、歩行距離差d、高度差hが、あらかじめ、あるいは利用者入力によってROM22、あるはフラッシュメモリ34に記憶されている。利用者が、ある地点Pk(k=s、1,2,・・・e)で現在地点ある旨の指示をしたとする。MPU20は、この指示入力があると、当該入力時点の時刻をRAM32に記憶するなどして取得する(s2→s3)。また、基準スケジュール情報60bに含まれている、各地点間の歩行予定時間65を取得し、最新スケジュール情報70を生成する(s4,s5)。
【0050】
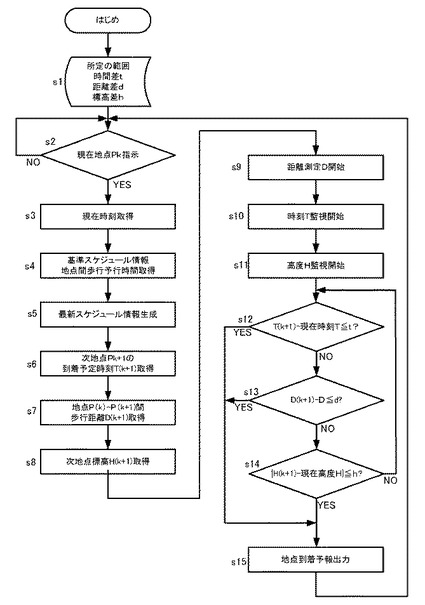
つぎに、次の地点Pk+1について、最新スケジュール情報70に記述されている次の地点Pk+1の到着予定時刻66と、次の地点Pk+1までの地点間距離D(k+1)64、および基準スケジュール情報60bに含まれている標高H(k+1)63を取得する(s6〜s8)。そして、歩数計機能により、地点Pkを起点とし歩行距離Dの測定と、時刻Tの監視と、高度Hの監視をそれぞれ開始する(s9〜s11)。
【0051】
MPU20は、現在の時刻Tと先に取得した次地点Pk+1の到着予定時刻T(k+1)66の差が定義された所定時間差t以内、次地点Pk+1までの地点間距離D(k+1)64と測定している歩行距離Dの差が所定距離差d以内、および次地点Pk+1の標高H(k+1)63と現在高度Hとの差が所定高度差h以内のいずれかである場合、アラーム音をスピーカ27より音声出力したり、所定の情報をLCD4に表示出力したりするなどして、次の地点にもうすぐ到着する旨の予報(地点到着予報)を出力する(s12→s15、s12→s13→s15,s12→s13→s14→s15)。なお、次の地点の標高と現在高度との差については、登りと下りがあるので、絶対値を採用する。
【0052】
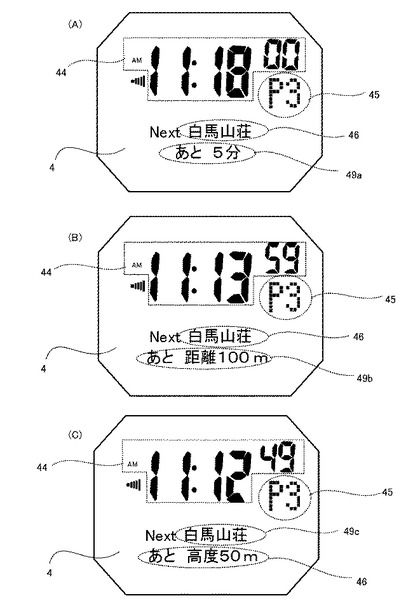
利用者は、このようにして次の経由地点付近になると、その旨の予報が出力されるので、次の地点での現在地点入力を行うことを意識する。したがって、その現在地点入力を忘れずに確実に行うことができる。図16に、地点到着予報の表示出力状態を示した。(A)〜(C)は、それぞれ、時間差tに基づく予報表示、歩行距離差dに基づく予報表示、および高度差hに基づく予報表示の状態に対応している。それぞれ、次の地点45までの時間49a、距離49b、高度49cが、次の地点の名称46とともに表示されている。
【0053】
<高度について>
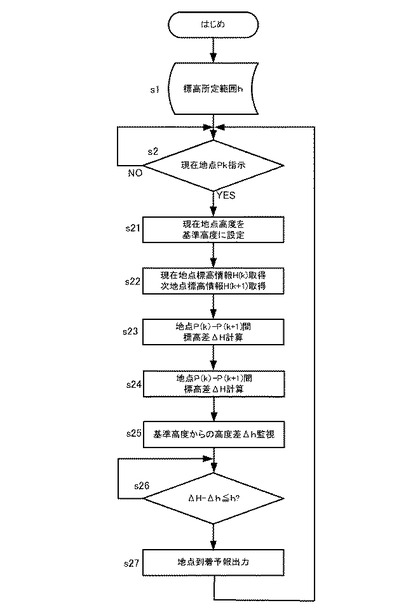
高度は、1気圧のときを標高0mとして計算しているため、同じ標高でも天候などによって気圧が変化すれば、計算する高度に誤差が生じる。そこで、絶対高度に基づいて地点到着予報を出力するのではなく、現在地点からの高度差に基づいて地点到着予報を出力してもよい。図17にその高度差に基づく地点到着予報の情報処理部分を示した。図13に示した情報処理の流れと同様に、標高差についての所定の数値範囲hが設定されている状態(s1)で、現在地点の指示入力があると、MPUは、この指示時点における気圧データ基づく高度を基準高度に設定する(s2→s21)。また、基準スケジュール情報に含まれる標高情報に基づいて、現在地点Pkと次の地点Pk+1の標高差ΔHを計算する(s22,s23)。そして、各サンプリング機会に計算した高度と基準高度との差Δhを監視し、当該高度差Δhと基準スケジュール情報に基づく標高差ΔHとの差(ΔH−Δh)が所定範囲Δh以内になったとき、地点到着予報を出力する。それによって、短時間で気圧が激変しない限り、正確に予報を出力することができる。
【0054】
<高度の補正について>
上述したように高度は、気圧に基づいて計算されるため、ある程度の誤差が生じることはやむを得ない。しかし、本実施例のリスト・コンピュータ1は、行程スケジュール管理機能を備え、その機能を実現するために、各地点の正確な標高情報63が含まれている基準スケジュール情報(60,60b)を記憶している。そして、この正確な標高情報63を利用すれば、気圧に基づく高度を補正することが可能となる。
【0055】
具体的には、利用者は、行程スケジュール管理機能を利用するために、各地点で現在地点入力を行う。そこで、MPU20は、ある地点で、現在地点入力があると、行程スケジュール情報60bにおけるこの地点61の標高63を取得し、気圧センサ29からの気圧データに基づいて計算している高度の値をこの標高63の数値に一致させて、高度を補正する。それによって、各地点において高度が補正され、行程中に正確な高度を確認することができ、また高度に基づいて地点到着予報を出力する際にも、より正確なタイミングで予報を出力することができる。
【0056】
===その他の実施例===
<地点到着予報の出力について>
上記実施例における地点到着予報機能では、時刻の他に、歩行距離と高度のいずれかが、基準スケジュール情報60bにおいて対応する情報(地点間距離、標高)に対して所定の範囲内になると予報が出力されるので、歩速が速すぎたとしても、経由地点に到着するまでに確実に予報が出力され、経由地点での現在地点入力操作のし忘れを防止することができる。もちろん、到着予定時刻に対してある程度余裕を見て早めの時刻に予報が出力されるようにすれば、時刻に基づく予報出力だけでもよい。したがって、時刻、歩行距離、高度の全ての条件に基づいて予報を出力しなくても、いずれか一つの条件に基づいて予報を出力しても大きな問題はない。
【0057】
しかし、予報を早く出し過ぎると、現在地点に到着するまでに予報の事実を忘れてしまう、という可能性も確かにある。また、確実に最新スケジュールとの差を利用者に確認させる、という目的からも、時刻と歩行距離と高度のいずれかを組み合わせて予報を出力した方が好ましいと言える。
【0058】
<地点到着予報出力タイミングの設定について>
上述したように、予報を早く出し過ぎるのも問題がある。そして、高度差、および地点間距離と歩行距離との差に基づいて地点到着予報を出力する場合では、現在地点と次地点間の歩行予定時間を考慮しないと、適切なタイミングで予報を出力することができなくなる場合もある。そこで、標高との高度差や、地点間距離と歩行距離との差について、予報を出力タイミングを規定するための所定範囲の値(h,d)を一律に設定せず、予報を出力するタイイングを高度差や地点間距離と歩行距離との差に基づいて決定する場合でも、次の地点における到着予定時刻に対して所定時間前に予報が出力されるように設定してもよい。すなわち、予報を出力するタイミングを決定する所定範囲の値(h,d)を前後の二つの地点間毎に個別に設定してもよい。
【0059】
例えば、図7に示した基準スケジュール情報60bに基づいて説明すると、出発地点1P0を出発した段階で、次の経由地点P1の到着予定時刻は6:04であり、この5分前に予報を出力する場合、この5分を予報出力時間tとして、まず、基準スケジュール情報60bに基づいて、出発地点「P0」と次の地点「P1」との標高差ΔH=1540−1240=300mと、地点間距離ΔD=2400m、および歩行予定時間T=55分を取得する。
【0060】
次に、これらの高度差ΔHと地点間距離ΔDを歩行時間Tで除算し、その値に先の予報出力時間t=5分を乗算する。それによって、P1への到着予定時刻から所定時間t前に予報を出力するための数値範囲となる高度差h=t×ΔH/T、および地点間距離と歩行距離との差d=t×ΔD/Tが求められる。MPU20は、高度と歩行距離を監視し、経由地点P1の標高との高度差がdとなった時点、および出発地点P0と経由地点P1との地点間距離と歩行距離との差がdとなったときに予報を出力する。同様にして、現在地点入力を受け付けて、最新スケジュール情報を生成する度に、その次の地点への到着予定時刻に対して5分前となるようにhやdを設定する。このようにして、所定時間t当たりの移動距離、すなわち高度変化や歩行距離を各地点間で個別に設定することで、適切なタイミングで予報を出すことが可能となる。
【符号の説明】
【0061】
1 リスト・コンピュータ、4 液晶表示器、5 操作ボタン、20 MPU、
21 RAM、22 ROM、25 表示制御部、26 操作制御部、
27 スピーカ、28 音声出力制御部、29〜32 センサ、
34 不揮発性メモリ、35 通信インタフェース、
42,42a,42b 7セグメントパターン
43a 主ドットパターン領域、43b 副ドットパターン領域
50 クレイドル、60,60b,60c 基準スケジュール情報、
70,70b 最新スケジュール情報
【技術分野】
【0001】
この発明は、登山やトレッキングなどの行程スケジュールを管理するための携帯型行程スケジュール管理装置に関する。
【背景技術】
【0002】
登山やトレッキングをする前に何らかのスケジュールを立てることは珍しくない。高山や尾根の縦走など、行程が長時間にわたれば、登山者自身の体力に見合った、より緻密なスケジュールを立てる必要がある。そして、登山を開始してからは、作成したスケジュールと実際の行程とを比較し、ある経由地点で時間の遅れがあれば、次の経由地点までの歩速を速くするなどして、目的とする時刻(例えば、日没時刻など)までに目的の場所に到着するように調整する。なお、以下の特許文献1には、GPSを用いて利用者の行動スケジュールを管理するための携帯端末について記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−283786号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1に記載の技術は、GPS信号の受信機能を搭載し、あらかじめ作成した行程スケジュールに対し、目的地や経由地への到着時刻が予定通りであったかどうかを確認することができるようになっている。しかし、GPS受信機能を搭載しているため、装置自体が高価なものとなる。また、小型・軽量化にも限界がある。型化を達成したとしても、情報の表示面積が相対的に少なくなり、GPSによって正確な相対位置情報を得られても、それに見合う十分な情報を表示することができなくなる。操作キーやボタンの数も限られ、複雑な操作が困難となる。
【0005】
本発明は、必要十分な機能を備えるとともに、簡素な構成で安価な携帯型行程スケジュール管理装置を提供することを目的としている。なお、その他の目的については、以下の記載で明らかにする。
【課題を解決するための手段】
【0006】
上記目的を達成するための主たる発明は、時計機能を備えて、出発地点から目的地までの行程スケジュールを管理するための携帯型行程スケジュール管理装置であって、
出発地点と経由地点と目的地点のそれぞれの到着予定時刻を対応付けした基準スケジュール情報を含む情報を記憶する記憶部と、
利用者入力を受け付ける操作入力部と、
表示器と、
最新スケジュール生成処理と、スケジュール表示処理とを実行する制御部と、
を備え、
前記最新スケジュール生成処理は、前記スケジュール情報に含まれるいずれかの地点を現在地点として指示する旨の利用者入力に応動して、前記基準スケジュール情報に含まれる前記現在地点の到着予定時刻と、現在時刻との差に基づいて、前記各地点の到着予定時刻を変更した最新スケジュール情報を生成して記憶部に記憶し、
前記スケジュール表示処理は、前記基準スケジュール情報と前記最新スケジュール情報の内容を前記表示器に表示する、
ことを特徴としている。
【図面の簡単な説明】
【0007】
【図1】本発明の携帯型行程スケジュール管理装置の一実施形態であるリスト・コンピュータを示す図である。
【図2】上記リスト・コンピュータの液晶表示器に配設されているパターンを示す図である。
【図3】上記リスト・コンピュータの機能ブロック構成を示す図である。
【図4】上記リスト・コンピュータをクレイドルに接続した状態を示す図(A)と、クレイドルの内部回路の概略図(B)である。
【図5】上記リスト・コンピュータに記憶されている基準スケジュール情報のデータ構造を示す図である。
【図6】上記リスト・コンピュータに対して出発地点を指示する現在地点入力操作を行った際のLCDの表示状態を示す図である。
【図7】到着予定時刻が付記された基準スケジュール情報のデータ構造を示す図である。
【図8】上記リスト・コンピュータに対して第1の経由地点を指示する現在地点入力操作を行った際のLCDの表示状態を示す図である。
【図9】上記リスト・コンピュータにて生成される最新スケジュール情報のデータ構造を示す図である。
【図10】上記LCDにて第1の経由地点に関する情報が表示されている状態を示す図である。
【図11】上記リスト・コンピュータに対して第2の経由地点を指示する現在地点入力操作を行った際のLCDの表示状態を示す図である。
【図12】更新後の上記最新スケジュール情報のデータ構造を示す図である。
【図13】上記LCDにて第2の経由地点に関する情報が表示されている状態を示す図である。
【図14】上記基準スケジュール情報の変更例(A)と、上記最新スケジュール情報の変更例(B)を示す図である。
【図15】上記リスト・コンピュータにおける地点到着予報機能に関わる情報処理の流れを示す図である。
【図16】地点到着予報機能に関わる情報がLCDに表示されている状態を示す図である。
【図17】上記地点到着予報機能に関わる情報処理の変更例を示す図である。
【発明を実施するための形態】
【0008】
===本発明の特徴===
本発明の携帯型行程スケジュール管理装置は、登山やトレッキング、ハイキングなどに行く利用者が携帯し、実際の行程が、事前に計画したスケジュール(基準スケジュール)通りに進んでいるかどうかを確認するための情報処理装置である。基準スケジュールは、出発地や目的地の出発時間と到着予定時刻、目的地までの経由地点の到着時刻などを記述したものである。利用者は、行程中、基準スケジュールをこの装置に表示させ、各経由地点の到着時間と実際の到着時間を逐次確認し、歩速を早めたり休憩を取ったりする。
【0009】
また、実際に登山を開始すると、特に初心者であれば、歩くことに夢中になり、各経由地点での確認を怠ったり、忘れたりして、基準スケジュールと現状との整合度を確認することができなくなり、結果的に、行程が大幅に遅れる可能性がある。例えば、日没までにその日の行程を終える予定が狂えば、事故に遭遇する可能性も十分にあり得る。そこで、利用者が各経由地点で基準スケジュールと実際の行程との差を必ず確認させることも必要である。さらに、GPS受信機能などの高価で複雑な機能を搭載せず、必要十分の情報量で、現状を確認でき、しかも省電力で軽量・小型化であることが望まれる。本発明は、このようなことを考えながら創作したものである。
【0010】
そして本発明は、上記主たる発明として記載した携帯型行程スケジュール管理装置に加え、以下の特徴を備えた携帯型行程スケジュール管理装置にも及んでいる。
【0011】
前記制御部は、前記最新スケジュール情報に含まれる前記現在地点の次の地点の到着予定時刻の所定時間前になると、その旨を利用者に報知する地点到着予報処理を実行すること。
【0012】
歩行に伴う振動を検出するセンサを備え、
前記記憶部は、利用者の歩幅を記憶し、
前記基準スケジュール情報は、各地点間の距離情報を含み、
前記制御部は、前記センサが検出した振動に基づいて歩数を計数するとともに、当該歩数に前記歩幅を乗算して歩行距離を計算する距離測定処理と、当該距離測定処理により測定した前記現在地点からの歩行距離と、前記基準スケジュール情報に含まれる当該現在地点と次の地点との地点間距離との差が所定範囲内になると、その旨を利用者に報知する地点到着予報処理とを実行すること。
【0013】
気圧センサを備え、
前記基準スケジュール情報は、各地点の標高情報を含み、
前記制御部は、気圧センサからの気圧データに基づいて高度を計算する高度計算処理と、当該高度計算処理により計算した高度と、基準スケジュール情報に含まれる前記現在地点の次の地点の標高との差が所定の範囲内になると、その旨を利用者に報知する地点到着予報処理とを実行すること。
【0014】
気圧センサを備え、
前記基準スケジュール情報は、各地点の標高情報を含み、
前記制御部は、気圧センサからの気圧データに基づいて前記現在地点の高度を基準とした高度差を計算する高度計算処理と、前記基準スケジュール情報に含まれる前記現在地点の次の地点の標高差と、前記高度計算処理により計算した高度差との差が所定の範囲内になると、その旨を利用者に報知する地点到着予報処理を実行すること。
【0015】
気圧センサを備えた携帯型行程スケジュール管理装置において、前記現在地点として指示する旨の利用者入力に応動して、当該現在地点の高度を、前記スケジュール情報に含まれる当該地点の前記標高情報と同じ値に補正すること。
【0016】
上記前記制御部は、基準スケジュール情報に基づいて所定時間あたりの移動距離を計算するとともに、当該移動距離を前記所定範囲内の差に対応する数値とすること。
【0017】
===装置の基本的な構成===
図1は、本発明の実施例における携帯型行程スケジュール管理装置の外観図である。当該携帯型行程スケジュール管理装置1は、腕に装着するためのバンド2を備えた腕時計型であり、基本的な構造や構成は、ケース3の前面に液晶表示器(LCD)4を文字盤として備えたデジタル式腕時計と同様である。そして、ケース3の側面には、この携帯型行程スケジュール管理装置(以下、リスト・コンピュータ)1を操作するための複数のボタン5が配設されている。
【0018】
図2に、LCD4の表示パターンを示した。特定の文字や図形を専用に表示するためのアイコン用パターン41と、数字を表示するための7セグメントパターン42、テキストや図形をビットマップ表示するための大小2つのドットマトリクスパターン(43a,43b)が配設されている。
【0019】
図3に、上記リスト・コンピュータ1の機能ブロック構成を示した。リスト・コンピュータのハードウエア構成は、各種センサ(29〜32)を搭載して、温度、気圧や標高、方位などの情報を表示する、いわゆる「アウトドア・ウオッチ」と呼ばれる腕時計と同様である。MPU20、RAM21、ROM22からなるコンピュータ本体をコントローラとし、ROM22にはMPU20によって実行される各種プログラムやフォントデータが記憶されている。また、外部記憶としてフラッシュメモリ34を内蔵している。
【0020】
発振回路23と分周回路24は、各種周波数のクロックを発生させる回路であり、MPU20を動作させるための基準クロックや時刻表示やストップウオッチなどの計時機能に関わるクロックを発生する。表示制御部25は、MPU20からの指示に従って各種情報をLCD4に表示し、操作制御部26は、操作ボタン5からの操作信号をMPU20に入力する。音声制御部28は、MPU20からの指示に従ってスピーカ27を駆動し、アラーム音など音声出力させる。
【0021】
さらに、アウトドアでの用途を想定した様々な情報を利用者に提供するための機能(アウトドア機能)を実現するために、気圧センサ29、温度センサ30、方位センサ31に加え、歩行に伴う振動を検出するためのセンサ32を備えている。本実施例では加速度センサ32を採用している。そして、各センサ(29〜32)が出力する信号は、それぞれのセンサ(29〜32)に対応するA/D変換回路(33a〜33d)にて各種デジタルータ(気圧データ、温度データ、方位データ、振動データ)に変換されてMPU20に入力される。
【0022】
MPU20は、操作制御部26からの操作信号に応動してROM22に記憶されている所定のプログラムを実行し、そのプログラムの実行結果などをRAM21に書込んだり、その書き込んだデータをRAM21から読み出したりする。MPU20は、各センサ(29〜32)に接続されているA/D変換回路(33a〜33d)からの各種データについても、サンプリング機会ごとに更新しながらRAM21に読み出し可能にして格納する。
【0023】
さらに、格納した各種データ基づいて所用の情報を随時生成してRAM21に格納する。例えば、あらかじめ記憶されている気圧と高度との関係から気圧センサ29からの気圧データに基づいて高度を計算し、その計算結果を格納する。
【0024】
また、リスト・コンピュータ1は、歩数計機能を備え、利用者入力された歩幅をフラッシュメモリ34に記憶し、MPU20が、加速度センサ32からの振動データを解析して歩行に伴う振動を抽出するとともに、その振動に基づいて歩数を計数したり、その歩数に歩幅を乗算して歩行距離を計算したりする。そして、利用者が所定の操作入力を行った時点を起点とした歩行距離を計算し、その計算結果を更新しながらRAM21に格納していく。
【0025】
さらにリスト・コンピュータ1は、パーソナルコンピュータ(PC)などの外部の情報処理装置と通信する機能を備え、そのための構成として、通信インタフェース(IF)35を備えている。MPU20は、この通信IF35を介して、情報処理装置に各種データを転送したり、情報処理装置から各種データを受け取ったりする。
【0026】
なお、通信IF35と外部の情報処理装置とは、直接接続される形態である場合もあるし、クレイドルと呼ばれる中間装置を介して接続される形態である場合もある。本実施例では、通信IF35は、電波や赤外線などを用いた無線信号によりクレイドルと通信する。
【0027】
図4の(A)と(B)に、クレイドル50に装着された状態のリスト・コンピュータ1と、クレイドル50の内部回路の概略構成とを示した。クレイドル50は、無線信号によりリスト・コンピュータ1の通信IF35と通信するための無線通信IF51と、情報処理装置と汎用の通信規格に準じたプロトコルで通信するための汎用通信IF52とを備え、CPU、RAM、ROMを備えたコントローラ53は、双方の通信IF(41,42)を介して送受信されるプロトコルの異なる信号を解釈して相互変換する。なお、クレイドル50と情報処理装置とは、例えば、USB規格に準じたコネクタ54を両端に備えたケーブル55を介して接続される。このような構成により、リスト・コンピュータ1のMPU20は、通信IF35を介して間接的に外部の情報処理装置と通信する。そして、MPU20は、通信IF35を介して外部の情報処理装置から転送されてきたデータをフラッシュメモリ34に格納したり、フラッシュメモリ34内のデータを外部の情報通信装置に転送したりする。
【0028】
上記構成を備えたリスト・コンピュータ1は、MPU20の制御により、アウトドア機能や時計機能に関わる情報、受信したデータ、情報処理の実行結果などをLCD4に表示したり、アラーム音をスピーカ27から出力したりする。
【0029】
さらに、リスト・コンピュータ1は、利用者が事前に作成した登山やトレッキングのスケジュールについての情報(基準スケジュール情報)を記憶し、実際の行程と比較しながらスケジュールを随時最新のものに更新し、その最新スケジュールの内容を利用者に提示するスケジュール管理機能を備えている。しかも、本実施例のスケジュール管理機能によれば、基準スケジュールと実際の行程との差を確実に確認させて、利用者が安全に登山やトレッキングを遂行できるように支援する機能も備えている。
【0030】
===基準スケジュール情報===
フラッシュメモリ34には、スケジュール管理機能を実現させるための情報として、基準スケジュール情報が記憶さている。図5に当該基準スケジュール情報60のデータ構造を示した。本実施例では、出発地点P0と目的地点Pnの途上に複数の経由地点Pk(k=1,2,3…,n−1)が設定されている。この図では、登山のスケジュールが示されており、各地点61についての情報として、名称62と標高63が含まれているとともに、各地点間の各地点間の距離64や歩行予定時間65も記述されている。例えば、P0とP1とは、2400mの距離(地点間距離)があり、その歩行予定時間は55分となっている。
【0031】
もちろん、基準スケジュール情報60のデータの構造や記述内容は、適宜に変更可能である。例えば、地点間距離64は、出発地点P0からの距離で記述してもよいし、歩行予定時間65に加え、各地点61における休憩時間を記述してもよい。地点間の歩行予定時間65に代えて、出発地点P0からの累積歩行予定時間を記述したり、各地点61の出発予定時刻や到着予定時刻を記述したりすることも可能である。少なくとも、各地点間の距離64が特定できるとともに、出発地点P0の出発予定時刻、あるいは実際の出発時刻を特定した段階で、以後の各地点61の到着予定時刻が特定できるようなデータ構造であればよい。
【0032】
===基準スケジュール情報の入力===
図5に示した基準スケジュール情報は、リスト・コンピュータ1に当初から記憶させておくことも考えられる。また、手間が掛かるが、操作ボタン5により、テキストや数値入力をすることも可能である。しかし、本実施例では、リスト・コンピュータ1が標準で備える通信機能を使って基準スケジュール情報60を外部の情報処理装置から入力することとしている。
【0033】
例えば、PCを情報処理装置として、そのPCに基準スケジュール情報60を編集するためのソフトウエアをインストールさせておく、利用者はPCを使って基準スケジュール情報60を編集し、所定形式のファイルに作成する。そして、そのファイルをフラッシュメモリ34に転送し記憶させる。MPU20は、所定形式のファイルを基準スケジュール情報60として認識する。
【0034】
あるいは、Webサーバー上に基準スケジュール情報60をダウンロード可能に用意しておいてもよい。この場合、PCはブラウザを実装しているだけでよく、基準スケジュール情報60の編集ソフトウエアをインストールする必要がない。
【0035】
===基準スケジュールの設定===
基準スケジュール情報60の内容を実際の行程における時刻に対応させるためには、まず、各地点61の到着予定時刻を規定する必要がある。本実施例では、基準スケジュール情報60には到着予定時刻が記載されていないため、実際の出発時刻と各地点間の歩行予定時間65とに基づいて、基準ケジュール情報60に各地点の到着予定時刻を付記することとしている。
【0036】
この到着予定時刻を当初の基準スケジュール情報60に付記するために、利用者は、出発地点において、所定の操作入力を行い、現在地点が出発地点P0である旨を指示する操作を行う。図6に出発地点の指示入力に伴うLCD4の表示状態の遷移を示した。基本的な表示状態である時刻表示状態(A)において、各種機能に対応する画面を呼び出すための所定の操作ボタン5を押して、スケジュール管理機能に関わる画面(スケジュール管理画面)を表示させる。なお、この表示状態において、他のボタン5を押すと、スケジュールに関わる各種情報(現在地点、次の地点、次の地点の到着予定時刻や到着までの時間、距離、標高など)を順次呼び出して表示させることができる。また、所定のボタン5に対する操作により、スケジュール管理機能に関わる各種情報を入力することもできる。
【0037】
MPU20は、スケジュール管理画面を表示する際、出発地点P0の情報を表示し、所定の操作入力を受け付けるごとに、順次P1、P2・・・と地点を進め、各地点についての情報を表示する。ここでは、出発地点P0の情報を表示させると、現在時刻44が時刻表示用の7セグメントパターン(42a,42b)に表示されている状態で、出発地点である旨の「P0」45が小さな表示面積の方のドットマトリクスパターン領域(副ドットパターン領域)43bに表示され、名称46が大きい方のドットマトリクスパターン領域(主ドットパターン領域)43aに表示される。なお、現在地点の指示入力があるまでは、出発時間47が未入力状態「−− −−」となっている。
【0038】
利用者は、出発に際して所定のボタン5を押して現在地点が出発地点P0であることを指示すると、MPU20は、当該入力時点の時刻をRAM32に記憶するなどして取得するとともに、この出発時刻47を主ドットパターン領域43aの名称46の上に表示する(B)。
【0039】
また、基準スケジュール情報60に含まれる各地点間の歩行予定時間65に従って、各地点への到着予定時刻を計算し、各地点に到着予定時刻を対応付けして基準スケジュール情報を更新し、この更新した基本スケジュール情報をフラッシュメモリ34に記憶する。図7に到着予定時刻66が付記された基準スケジュール情報60bのデータ構造を示した。
【0040】
===最新スケジュール情報の生成===
MPU20は、利用者が出発地点P0の場合と同様にして、各地点61でその地点に到着した旨の指示入力(現在地点入力)を行うことで、行程中、現在の位置が基準スケジュール情報60bに記載されているどの地点とどの地点の間なのかを認識する。すなわち、利用者が特定の地点をスケジュール管理画面に表示させ、その地点を現在地点であると指示すると、MPU20は、その地点を到着済みのフラグを立てる。そして、ある連続する2地点が到着済みと未到着であれば、現在位置がその2地点の間であること特定することができる。
【0041】
MPU20は、各地点にて現在地点入力を受け付けると、その都度、基準スケジュール情報60bの内容を実際の行程に応じて変更した最新のスケジュール情報を生成する。図8(A)〜(C)にこの最新スケジュールの生成過程でLCD4に表示される画面の遷移を示した。利用者は、出発地点P0から歩き始めて最初の経由地点P1に来たら、リスト・コンピュータ1を操作してスケジュール管理画面を呼び出す。呼び出した画面には、現在時刻44が表示された状態で、出発地点「P0」表示45と、その名称46と、先に出発地点P0で入力した出発時刻47とが表示されている(A)。ここで、所定の操作入力を行って、最初の経由地点P1の情報を表示させる(B)。この表示画面には、最初の経由地点である「P1」45と、その名称46が表示されているとともに、到着予定時刻が付記された基準スケジュール情報60bに記載されている当該P1への到着予定時刻47aが表示されている。この状態で利用者は同じ画面に表示されている現在時刻44から、当初の予定到着時間との差を確認することができる。そして、所定のボタン5を押して経由地点P1である旨の現在地点入力を行うと、MPU20は、この入力時刻を取得し、到着予定時刻に代えて実際に到着した時刻47bを表示し(C)、この時刻47bと基準スケジュール情報60bに含まれている各地点間の歩行予定時間65とに基づいて、次の経由地点P2以降の各地点61の到着予定時刻を計算し、その到着予定時刻66を各地点61に対応付けした最新スケジュール情報を生成する。
【0042】
図9に生成された最新スケジュール情報70の概略を示した。この例では、基準スケジュール情報60bに含まれる地点間の歩行予定時間65と実際に掛かった時間との差ΔTw73や、当該経由地点P1の到着予定時刻との時間差ΔTp74を計算し、これらの時間差(ΔTw73,ΔTp74)も最新スケジュール情報70に含める。また、地点P1について、現在地点入力した旨の「済」のフラグを立てる。
【0043】
これら最新スケジュール情報の内容は、利用者による所定の操作入力に従って、適宜にスケジュール管理画面に表示させることができる。図10に、上記各時間差(ΔTw,ΔTp)の表示例を示した。ここでは、最初の経由地点P1が指示された段階なので、ΔTw(48a)を表示した状態(A)とΔTp(48b)を表示した状態(B)では、ともに同じ時間差が表示されている。
【0044】
利用者は、次の経由地点P2でも、経由地点P1での操作と同様の操作を行い、P2の到着予定時刻を名称とともに表示させる。図11(A)(B)に2番目の経由地点P2を現在地点入力したときのLCD4の表示状態の遷移を示した。経由地点P2についての情報を最初に表示させた状態(A)では、到着予定時刻47aは、先の経由地点P1の現在地点入力がなされた時点で生成された最新スケジュール情報70に記載されている経由地点P2に対応する到着予定時刻47aであり、利用者は、同じ画面に表示されている到着予定時刻47aと現在時刻44とを比較することで、地点間の歩行予定時間と実際の歩行時間との差を確認することができる。そして、現在地点がP2である旨の現在地点入力操作を行うと、この入力時点の時刻を実際の経由地点P2の到着時刻として以後の地点における到着予定時刻を計算して最新スケジュール情報を更新する。また、当該指示時刻47bをP2の名称46とともに表示する(B)。
【0045】
図12に、経由地点P2点にて更新された最新スケジュール情報の概略を示した。経由地点P2に対応する歩行予定時間と実際の歩行時間との差ΔTw、および基準スケジュール情報における到着予定時刻との差ΔTpが付記されている。そして、利用者が所定の操作を行うと、MPU20は、これらの時間差(ΔTw,ΔTp)を取得して、図13に示すように、P1、P2間の歩行予定時間との具体的な差ΔTwを表示したり(A)、基準スケジュール情報における到着予定時刻との差ΔTpを表示したりする(B)。
【0046】
===最新スケジュール情報の変形例===
基準スケジュール情報に当初から到着予定時刻が含まれている場合、当初の基準スケジュール情報と、実際の出発時刻に基づいて各地点の到着予定時刻を変更した最初の最新スケジュール情報とを上書き禁止とし、以後、各経由地点では、実際の到着時刻との比較対象として、基準スケジュール情報と最初の最新スケジュール情報のいずれかを選択可能にして表示するようにしてもよい。それによって利用者は、スケジュールと現状との差を時刻と地点間の歩行予定時間いずれかを基準にして確認することができる。
【0047】
図14の(A)と(B)に、それぞれ、当初の基準スケジュール情報60cと最初の最新スケジュール情報70bとを例示した。例えば、目的地点おいて、帰りのバスの発車時刻が決まっている場合などでは、基準スケジュール情報60cと現状とを比較することが想定される。目的地点と経由地点の双方に宿泊所がある場合に、日没までに到着可能な地点を予測して宿泊所を決定する場合では、最初の最新スケジュール情報70bにおける到着予定時刻71bと現状とを比較することが想定される。
【0048】
===経由地点到着予報機能===
以上、行程スケジュール管理機能の基本的な情報処理や操作手順について説明した。しかし、この基本的な情報処理は、利用者が各経由地点で確実に現在地点を指示する操作を行うことを前提としている。すなわち、利用者が確実に各地点で現在地点を指示する操作を行わないと、基準のスケジュールと現状との差を正しく提示することができない。そこで、本実施例のリスト・コンピュータ1は、各地点で確実に現在地点入力操作を行わせるように、各地点に近づくと、その旨を報知する経由地点到着予報機能も備えている。本実施例では、リスト・コンピュータ1が備える時計機能と、アウトドア機能とにより、上記経由地点到着予報機能を実現している。
【0049】
図15に上記地点到着予報機能に関わる情報処理の流れを示した。予報を出力するタイミングを決定するために所定の範囲を定義した数値である、時間差t、歩行距離差d、高度差hが、あらかじめ、あるいは利用者入力によってROM22、あるはフラッシュメモリ34に記憶されている。利用者が、ある地点Pk(k=s、1,2,・・・e)で現在地点ある旨の指示をしたとする。MPU20は、この指示入力があると、当該入力時点の時刻をRAM32に記憶するなどして取得する(s2→s3)。また、基準スケジュール情報60bに含まれている、各地点間の歩行予定時間65を取得し、最新スケジュール情報70を生成する(s4,s5)。
【0050】
つぎに、次の地点Pk+1について、最新スケジュール情報70に記述されている次の地点Pk+1の到着予定時刻66と、次の地点Pk+1までの地点間距離D(k+1)64、および基準スケジュール情報60bに含まれている標高H(k+1)63を取得する(s6〜s8)。そして、歩数計機能により、地点Pkを起点とし歩行距離Dの測定と、時刻Tの監視と、高度Hの監視をそれぞれ開始する(s9〜s11)。
【0051】
MPU20は、現在の時刻Tと先に取得した次地点Pk+1の到着予定時刻T(k+1)66の差が定義された所定時間差t以内、次地点Pk+1までの地点間距離D(k+1)64と測定している歩行距離Dの差が所定距離差d以内、および次地点Pk+1の標高H(k+1)63と現在高度Hとの差が所定高度差h以内のいずれかである場合、アラーム音をスピーカ27より音声出力したり、所定の情報をLCD4に表示出力したりするなどして、次の地点にもうすぐ到着する旨の予報(地点到着予報)を出力する(s12→s15、s12→s13→s15,s12→s13→s14→s15)。なお、次の地点の標高と現在高度との差については、登りと下りがあるので、絶対値を採用する。
【0052】
利用者は、このようにして次の経由地点付近になると、その旨の予報が出力されるので、次の地点での現在地点入力を行うことを意識する。したがって、その現在地点入力を忘れずに確実に行うことができる。図16に、地点到着予報の表示出力状態を示した。(A)〜(C)は、それぞれ、時間差tに基づく予報表示、歩行距離差dに基づく予報表示、および高度差hに基づく予報表示の状態に対応している。それぞれ、次の地点45までの時間49a、距離49b、高度49cが、次の地点の名称46とともに表示されている。
【0053】
<高度について>
高度は、1気圧のときを標高0mとして計算しているため、同じ標高でも天候などによって気圧が変化すれば、計算する高度に誤差が生じる。そこで、絶対高度に基づいて地点到着予報を出力するのではなく、現在地点からの高度差に基づいて地点到着予報を出力してもよい。図17にその高度差に基づく地点到着予報の情報処理部分を示した。図13に示した情報処理の流れと同様に、標高差についての所定の数値範囲hが設定されている状態(s1)で、現在地点の指示入力があると、MPUは、この指示時点における気圧データ基づく高度を基準高度に設定する(s2→s21)。また、基準スケジュール情報に含まれる標高情報に基づいて、現在地点Pkと次の地点Pk+1の標高差ΔHを計算する(s22,s23)。そして、各サンプリング機会に計算した高度と基準高度との差Δhを監視し、当該高度差Δhと基準スケジュール情報に基づく標高差ΔHとの差(ΔH−Δh)が所定範囲Δh以内になったとき、地点到着予報を出力する。それによって、短時間で気圧が激変しない限り、正確に予報を出力することができる。
【0054】
<高度の補正について>
上述したように高度は、気圧に基づいて計算されるため、ある程度の誤差が生じることはやむを得ない。しかし、本実施例のリスト・コンピュータ1は、行程スケジュール管理機能を備え、その機能を実現するために、各地点の正確な標高情報63が含まれている基準スケジュール情報(60,60b)を記憶している。そして、この正確な標高情報63を利用すれば、気圧に基づく高度を補正することが可能となる。
【0055】
具体的には、利用者は、行程スケジュール管理機能を利用するために、各地点で現在地点入力を行う。そこで、MPU20は、ある地点で、現在地点入力があると、行程スケジュール情報60bにおけるこの地点61の標高63を取得し、気圧センサ29からの気圧データに基づいて計算している高度の値をこの標高63の数値に一致させて、高度を補正する。それによって、各地点において高度が補正され、行程中に正確な高度を確認することができ、また高度に基づいて地点到着予報を出力する際にも、より正確なタイミングで予報を出力することができる。
【0056】
===その他の実施例===
<地点到着予報の出力について>
上記実施例における地点到着予報機能では、時刻の他に、歩行距離と高度のいずれかが、基準スケジュール情報60bにおいて対応する情報(地点間距離、標高)に対して所定の範囲内になると予報が出力されるので、歩速が速すぎたとしても、経由地点に到着するまでに確実に予報が出力され、経由地点での現在地点入力操作のし忘れを防止することができる。もちろん、到着予定時刻に対してある程度余裕を見て早めの時刻に予報が出力されるようにすれば、時刻に基づく予報出力だけでもよい。したがって、時刻、歩行距離、高度の全ての条件に基づいて予報を出力しなくても、いずれか一つの条件に基づいて予報を出力しても大きな問題はない。
【0057】
しかし、予報を早く出し過ぎると、現在地点に到着するまでに予報の事実を忘れてしまう、という可能性も確かにある。また、確実に最新スケジュールとの差を利用者に確認させる、という目的からも、時刻と歩行距離と高度のいずれかを組み合わせて予報を出力した方が好ましいと言える。
【0058】
<地点到着予報出力タイミングの設定について>
上述したように、予報を早く出し過ぎるのも問題がある。そして、高度差、および地点間距離と歩行距離との差に基づいて地点到着予報を出力する場合では、現在地点と次地点間の歩行予定時間を考慮しないと、適切なタイミングで予報を出力することができなくなる場合もある。そこで、標高との高度差や、地点間距離と歩行距離との差について、予報を出力タイミングを規定するための所定範囲の値(h,d)を一律に設定せず、予報を出力するタイイングを高度差や地点間距離と歩行距離との差に基づいて決定する場合でも、次の地点における到着予定時刻に対して所定時間前に予報が出力されるように設定してもよい。すなわち、予報を出力するタイミングを決定する所定範囲の値(h,d)を前後の二つの地点間毎に個別に設定してもよい。
【0059】
例えば、図7に示した基準スケジュール情報60bに基づいて説明すると、出発地点1P0を出発した段階で、次の経由地点P1の到着予定時刻は6:04であり、この5分前に予報を出力する場合、この5分を予報出力時間tとして、まず、基準スケジュール情報60bに基づいて、出発地点「P0」と次の地点「P1」との標高差ΔH=1540−1240=300mと、地点間距離ΔD=2400m、および歩行予定時間T=55分を取得する。
【0060】
次に、これらの高度差ΔHと地点間距離ΔDを歩行時間Tで除算し、その値に先の予報出力時間t=5分を乗算する。それによって、P1への到着予定時刻から所定時間t前に予報を出力するための数値範囲となる高度差h=t×ΔH/T、および地点間距離と歩行距離との差d=t×ΔD/Tが求められる。MPU20は、高度と歩行距離を監視し、経由地点P1の標高との高度差がdとなった時点、および出発地点P0と経由地点P1との地点間距離と歩行距離との差がdとなったときに予報を出力する。同様にして、現在地点入力を受け付けて、最新スケジュール情報を生成する度に、その次の地点への到着予定時刻に対して5分前となるようにhやdを設定する。このようにして、所定時間t当たりの移動距離、すなわち高度変化や歩行距離を各地点間で個別に設定することで、適切なタイミングで予報を出すことが可能となる。
【符号の説明】
【0061】
1 リスト・コンピュータ、4 液晶表示器、5 操作ボタン、20 MPU、
21 RAM、22 ROM、25 表示制御部、26 操作制御部、
27 スピーカ、28 音声出力制御部、29〜32 センサ、
34 不揮発性メモリ、35 通信インタフェース、
42,42a,42b 7セグメントパターン
43a 主ドットパターン領域、43b 副ドットパターン領域
50 クレイドル、60,60b,60c 基準スケジュール情報、
70,70b 最新スケジュール情報
【特許請求の範囲】
【請求項1】
時計機能を備えて、出発地点から目的地までの行程スケジュールを管理するための携帯型行程スケジュール管理装置であって、
出発地点と経由地点と目的地点のそれぞれの到着予定時刻を対応付けした基準スケジュール情報を含む情報を記憶する記憶部と、
利用者入力を受け付ける操作入力部と、
表示器と、
最新スケジュール生成処理と、スケジュール表示処理とを実行する制御部と、
を備え、
前記最新スケジュール生成処理は、前記スケジュール情報に含まれるいずれかの地点を現在地点として指示する旨の利用者入力に応動して、前記基準スケジュール情報に含まれる前記現在地点の到着予定時刻と、現在時刻との差に基づいて、前記各地点の到着予定時刻を変更した最新スケジュール情報を生成して記憶部に記憶し、
前記スケジュール表示処理は、前記基準スケジュール情報と前記最新スケジュール情報の内容を前記表示器に表示する、
ことを特徴とする携帯型行程スケジュール管理装置。
【請求項2】
請求項1において、前記制御部は、前記最新スケジュール情報に含まれる前記現在地点の次の地点の到着予定時刻の所定時間前になると、その旨を利用者に報知する地点到着予報処理を実行することを特徴とする携帯型行程スケジュール管理装置。
【請求項3】
請求項1または2において、
歩行に伴う振動を検出するセンサを備え、
前記記憶部は、利用者の歩幅を記憶し、
前記基準スケジュール情報は、各地点間の距離情報を含み、
前記制御部は、前記センサが検出した振動に基づいて歩数を計数するとともに、当該歩数に前記歩幅を乗算して歩行距離を計算する距離測定処理と、当該距離測定処理により測定した前記現在地点からの歩行距離と、前記基準スケジュール情報に含まれる当該現在地点と次の地点との地点間距離との差が所定範囲内になると、その旨を利用者に報知する地点到着予報処理とを実行する、
ことを特徴とする携帯型行程スケジュール管理装置。
【請求項4】
請求項1〜3のいずれかにおいて、
気圧センサを備え、
前記基準スケジュール情報は、各地点の標高情報を含み、
前記制御部は、気圧センサからの気圧データに基づいて高度を計算する高度計算処理と、当該高度計算処理により計算した高度と、基準スケジュール情報に含まれる前記現在地点の次の地点の標高との差が所定の範囲内になると、その旨を利用者に報知する地点到着予報処理とを実行する、
ことを特徴とする携帯型行程スケジュール管理装置。
【請求項5】
請求項1〜3のいずれかにおいて、
気圧センサを備え、
前記基準スケジュール情報は、各地点の標高情報を含み、
前記制御部は、気圧センサからの気圧データに基づいて前記現在地点の高度を基準とした高度差を計算する高度計算処理と、前記基準スケジュール情報に含まれる前記現在地点の次の地点の標高差と、前記高度計算処理により計算した高度差との差が所定の範囲内になると、その旨を利用者に報知する地点到着予報処理を実行する、
ことを特徴とする携帯型行程スケジュール管理装置。
【請求項6】
請求項4または5において、前記現在地点として指示する旨の利用者入力に応動して、当該現在地点の高度を、前記スケジュール情報に含まれる当該地点の前記標高情報と同じ値に補正することを特徴とする携帯型行程スケジュール管理装置。
【請求項7】
請求項2〜6のいずれかにおいて、前記制御部は、基準スケジュール情報に基づいて所定時間あたりの移動距離を計算するとともに、当該移動距離を前記所定範囲内の差に対応する数値とすることを特徴とする携帯型行程スケジュール管理装置。
【請求項1】
時計機能を備えて、出発地点から目的地までの行程スケジュールを管理するための携帯型行程スケジュール管理装置であって、
出発地点と経由地点と目的地点のそれぞれの到着予定時刻を対応付けした基準スケジュール情報を含む情報を記憶する記憶部と、
利用者入力を受け付ける操作入力部と、
表示器と、
最新スケジュール生成処理と、スケジュール表示処理とを実行する制御部と、
を備え、
前記最新スケジュール生成処理は、前記スケジュール情報に含まれるいずれかの地点を現在地点として指示する旨の利用者入力に応動して、前記基準スケジュール情報に含まれる前記現在地点の到着予定時刻と、現在時刻との差に基づいて、前記各地点の到着予定時刻を変更した最新スケジュール情報を生成して記憶部に記憶し、
前記スケジュール表示処理は、前記基準スケジュール情報と前記最新スケジュール情報の内容を前記表示器に表示する、
ことを特徴とする携帯型行程スケジュール管理装置。
【請求項2】
請求項1において、前記制御部は、前記最新スケジュール情報に含まれる前記現在地点の次の地点の到着予定時刻の所定時間前になると、その旨を利用者に報知する地点到着予報処理を実行することを特徴とする携帯型行程スケジュール管理装置。
【請求項3】
請求項1または2において、
歩行に伴う振動を検出するセンサを備え、
前記記憶部は、利用者の歩幅を記憶し、
前記基準スケジュール情報は、各地点間の距離情報を含み、
前記制御部は、前記センサが検出した振動に基づいて歩数を計数するとともに、当該歩数に前記歩幅を乗算して歩行距離を計算する距離測定処理と、当該距離測定処理により測定した前記現在地点からの歩行距離と、前記基準スケジュール情報に含まれる当該現在地点と次の地点との地点間距離との差が所定範囲内になると、その旨を利用者に報知する地点到着予報処理とを実行する、
ことを特徴とする携帯型行程スケジュール管理装置。
【請求項4】
請求項1〜3のいずれかにおいて、
気圧センサを備え、
前記基準スケジュール情報は、各地点の標高情報を含み、
前記制御部は、気圧センサからの気圧データに基づいて高度を計算する高度計算処理と、当該高度計算処理により計算した高度と、基準スケジュール情報に含まれる前記現在地点の次の地点の標高との差が所定の範囲内になると、その旨を利用者に報知する地点到着予報処理とを実行する、
ことを特徴とする携帯型行程スケジュール管理装置。
【請求項5】
請求項1〜3のいずれかにおいて、
気圧センサを備え、
前記基準スケジュール情報は、各地点の標高情報を含み、
前記制御部は、気圧センサからの気圧データに基づいて前記現在地点の高度を基準とした高度差を計算する高度計算処理と、前記基準スケジュール情報に含まれる前記現在地点の次の地点の標高差と、前記高度計算処理により計算した高度差との差が所定の範囲内になると、その旨を利用者に報知する地点到着予報処理を実行する、
ことを特徴とする携帯型行程スケジュール管理装置。
【請求項6】
請求項4または5において、前記現在地点として指示する旨の利用者入力に応動して、当該現在地点の高度を、前記スケジュール情報に含まれる当該地点の前記標高情報と同じ値に補正することを特徴とする携帯型行程スケジュール管理装置。
【請求項7】
請求項2〜6のいずれかにおいて、前記制御部は、基準スケジュール情報に基づいて所定時間あたりの移動距離を計算するとともに、当該移動距離を前記所定範囲内の差に対応する数値とすることを特徴とする携帯型行程スケジュール管理装置。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】

【図10】
【図11】
【図12】
【図13】
【図14】

【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2010−223820(P2010−223820A)
【公開日】平成22年10月7日(2010.10.7)
【国際特許分類】
【出願番号】特願2009−72464(P2009−72464)
【出願日】平成21年3月24日(2009.3.24)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成22年10月7日(2010.10.7)
【国際特許分類】
【出願日】平成21年3月24日(2009.3.24)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]