
携帯型電子装置
【課題】スタンドの取付け状態を監視し、脱落しそうな状態であれば報知する。
【解決手段】スタンド20によって被設置面1に取外し可能に取付けられる携帯型電子装置10は、基準値を記憶する基準値記憶部140と、報知部130と、前記携帯型電子装置に加わる振動値(角速度及び/又は加速度)を検出するセンサ部120と、センサ部120により検出された振動値を周波数分解し、周波数分解された振動値からスペクトルピーク周波数を算出し、この値を基準値である基準周波数と比較することによって被設置面1への取付け状態を判定し、取り付け状態に基づく報知メッセージを前記報知部130を介して出力する制御部100と、を備える。
【解決手段】スタンド20によって被設置面1に取外し可能に取付けられる携帯型電子装置10は、基準値を記憶する基準値記憶部140と、報知部130と、前記携帯型電子装置に加わる振動値(角速度及び/又は加速度)を検出するセンサ部120と、センサ部120により検出された振動値を周波数分解し、周波数分解された振動値からスペクトルピーク周波数を算出し、この値を基準値である基準周波数と比較することによって被設置面1への取付け状態を判定し、取り付け状態に基づく報知メッセージを前記報知部130を介して出力する制御部100と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、スタンドによって被設置面に取り付けられる携帯型電子装置、特に、携帯型電子装置における振動の状態を判定することによって取付け状態を判定し、脱落しそうな場合に報知することで脱落防止を図る携帯型電子装置に関する。
【背景技術】
【0002】
携帯型のナビゲーション装置等の携帯型電子装置は、従来、スタンドによって自動車等のダッシュボード等に取外し可能に取付けられていた。スタンドは、通常、ねじや両面粘着テープ等によってダッシュボードに固定されていた。
【0003】
ねじによってダッシュボードに固定されたスタンドは、一度固定すると、ねじを取外さなければならず、取外して移動させることは手間のかかる作業であった。また、両面粘着テープによって固定された場合も、一旦固定してしまった場合は、両面粘着テープを剥がしたりするのは手間がかかり、しかも、両面粘着テープをきれいに剥がすことができず、ダッシュボードに接着跡が残ってしまうこともあった。
【0004】
そこで、下記特許文献1(特開2008−239100号公報)は、携帯型電子装置をダッシュボード等に固定するためのスタンドを、ねじや両面粘着テープに代えて、吸着面を有する吸盤を備える構成としている。吸盤を使用することによって、このスタンドを備える携帯型電子装置の取外し操作は簡単になり、ユーザは所望の位置へ簡単に取付け、取外しを行うとともに取付け位置の移動を行うことが容易にできるようになる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−239100号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、両面粘着テープや吸盤が取付けられるダッシュボード等の被設置面は、自動車の走行時には定常的に振動にさらされるだけでなく、高温や低温にもさらされる。そのため、両面粘着テープや吸盤を使用してスタンドをダッシュボード等の被設置面に取付けた場合、両面粘着テープや吸盤の吸着力は次第に弱くなり、スタンドはある時点で取付けられた位置から脱落することがある。取付け箇所から脱落するなら、それによって支持されていた携帯型電子装置が車内に落下し、装置が損傷したり、人体を傷つけたり、運転に支障をきたしたりする恐れがある。
【0007】
そこで、本発明の目的は、スタンドによって自動車のダッシュボード等の被設置面に取付けられる携帯型電子装置において、被設置面へのスタンドの取付け状態及び/又はスタンドへの携帯型電子機器の取付け状態を監視し、脱落しそうな状態であれば報知することによって、脱落防止を図ることである。
【課題を解決するための手段】
【0008】
上記課題を解決するため本発明の携帯型電子装置は、スタンドに取外し可能に取付けられる携帯型電子装置であって、前記携帯型電子装置は、基準値を記憶する基準値記憶部と、報知部と、前記携帯型電子装置に加わる振動値を検出するセンサ部と、前記振動値と前記基準値とに基づいて前記スタンドへの前記携帯型電子装置の取付け状態を判定し、前記取り付け状態に基づく報知メッセージを前記報知部を介して出力する制御部と、を備えることを特徴とする。
【0009】
上記課題を解決するため本発明の携帯型電子装置は、スタンドによって被設置面に取外し可能に取付けられる携帯型電子装置であって、前記携帯型電子装置は、基準値を記憶する基準値記憶部と、報知部と、前記携帯型電子装置に加わる振動値を検出するセンサ部と、前記振動値と前記基準値とに基づいて前記被設置面へのスタンドの取付け状態を判定し、前記取り付け状態に基づく報知メッセージを前記報知部を介して出力する制御部と、を備えることを特徴とする。
【0010】
上記課題を解決するため本発明の携帯型電子装置は、スタンドによって被設置面に取外し可能に取付けられる携帯型電子装置であって、前記携帯型電子装置は、基準値を記憶する基準値記憶部と、報知部と、前記携帯型電子装置に加わる振動値を検出するセンサ部と、前記振動値と前記基準値とに基づいて前記被設置面へのスタンドの取付け状態及び前記スタンドへの前記携帯型電子機器の取付け状態を判定し、前記取り付け状態に基づく報知メッセージを前記報知部を介して出力する制御部と、を備えることを特徴とする。
【0011】
また、本発明の携帯型電子装置において、前記制御部は、前記センサ部により検出された振動値を周波数分解し、前記周波数分解した振動値と前記基準値とに基づいて前記取付け状態を判定することを特徴とする。
【0012】
また、本発明の携帯型電子装置において、前記基準値は、基準周波数であり、前記制御部は、前記周波数分解した振動値からスペクトルピーク周波数を算出し、前記基準周波数と前記スペクトルピーク周波数とを比較することにより、前記取り付け状態を判定することを特徴とする。
【0013】
また、本発明の携帯型電子装置において、前記基準周波数は、前記スペクトルピーク周波数の履歴値であることを特徴とする。
【0014】
また、本発明の携帯型電子装置において、前記基準値は、特定の周波数における振幅値の大きさであり、前記制御部は、前記周波数分解した振動値のうちの前記特定の周波数における振幅値の大きさと前記基準値である特定の周波数における振幅値の大きさとを比較することにより、前記取り付け状態を判定することを特徴とする。
【0015】
また、本発明の携帯型電子装置において、前記制御部は、前記振動値と前記基準値とに基づいて前記スタンドが遥動なく前記被設置面に取り付けられているか否かを判定し、前記スタンドが遥動なく前記被設置面に取り付けられていないと判定した場合に、前記スタンドの脱落の危険性を示す報知メッセージを前記報知部を介して出力することを特徴とする。
【0016】
また、本発明の携帯型電子装置において、前記制御部は、前記スタンドが遥動していると判定し、前記報知部に前記報知メッセージを出力した後に、前記スタンドが遥動していないと判定した場合、前記スタンドの脱落の危険性が解消されたことを示すメッセージを前記報知部を介して出力することを特徴とする。
【0017】
また、本発明の携帯型電子装置において、前記スタンドが取り付けられる被設置面は自動車に設けられており、前記制御部は前記自動車がアイドリング状態か否かを判定し、前記自動車がアイドリング状態である場合に、前記センサ部により検出された振動値を周波数分解することを特徴とする。
【発明の効果】
【0018】
上記手段により本発明は以下に説明する優れた効果を発揮する。すなわち、本発明の携帯型電子装置によれば、携帯型電子装置に加わる振動値、つまり、角速度や加速度を測定し、測定された振動値と基準値とを比較することによってスタンドが被設置面にしっかりと取り付けられているかそれとも不安定な状態であるか、及び/又は、携帯型電子機器がスタンドにしっかりと取り付けられているかそれとも不安定な状態であるかを判定できるようになる。これにより、取付け状態を監視することが可能となり、必要な報知メッセージを出力することで脱落防止を図ることが可能となる。
【0019】
本発明の携帯型電子装置の一態様によれば、振動値を周波数分解し、周波数分解された振動値と基準値とに基づいて取付け状態を判定することが可能となる。
【0020】
本発明の携帯型電子装置の一態様によれば、基準周波数と周波数分解された振動値のスペクトルピーク周波数とを比較することによって取付け状態を判定する。携帯型電子装置では、スタンドによる被設置面への取付け状態、及び/又は携帯型電子装置のスタンドへの取付け状態によってスペクトルピーク周波数が変化するから、スペクトルピーク周波数の変化を監視することで、取付け状態を信頼度よく判定することが可能となる。
【0021】
本発明の携帯型電子装置の一態様によれば、基準周波数は、この装置において測定された振動値のスペクトルピーク周波数の履歴値である。振動値のスペクトルピーク周波数は、携帯型電子装置の種類や個体差だけでなく、取付けるスタンドの種類、スタンドの向き、被設置面の状態、等の要素に依存するので、履歴値を基準値として記録すれば、最初にしっかりと取付けられた状態のスペクトルピーク周波数を取付け状態を判定するための基準とすることができる。これにより、常に、しっかりと取付けられたときの状態に比べてスペクトルピーク周波数がどれだけ変化したかに基づいて取付け状態を判定することができるようになる。
【0022】
本発明の携帯型電子装置の一態様によれば、基準値である特定の周波数における振幅値の大きさと、周波数分解された振動値の特定の周波数における振幅値の大きさを比較することによって取付け状態を判定する。スタンドによって被設置面に取付けられる携帯型電子装置では、取付け状態によって特定の周波数における振幅値の大きさが変化するから、特定の周波数における振幅値の大きさの変化を監視することで、取付け状態を信頼度よく判定することが可能となる。
【0023】
本発明の携帯型電子装置の一態様によれば、スタンドが遥動なくしっかりと被設置面に取付けられているか否かを判定し、遥動なく被設置面に取付けられていない場合には、スタンド脱落の危険を示す報知メッセージを出力する。これにより、スタンドの取付けをユーザに促し、スタンドの脱落防止を図ることが可能となる。
【0024】
本発明の携帯型電子装置の一態様によれば、スタンド脱落の危険を示す報知メッセージを出力した後、スタンドの取付け状態を再度判定し、スタンドが遥動していない場合には、スタンド脱落の危険性が解消されたことを示すメッセージを出力する。これにより、スタンドが正しく取付けられたことをユーザが認識することが可能となる。
【0025】
本発明の携帯型電子装置の一態様によれば、この装置はスタンドによって自動車に設けられた被設置面に取付けられるものであり、アイドリング状態を判定し、アイドリング状態のときの振動値を用いて取付け状態を判定する。これにより、自動車の走行時等の不安定状態ではなく安定した状態のときに取付け状態を判定することが可能となり、取付け状態の判定を精度よく行うことが可能となる。
【図面の簡単な説明】
【0026】
【図1】実施例の携帯型ナビゲーション装置を、吸盤スタンドを使用して自動車のダッシュボードに取付けた状態を示す図である。
【図2】実施例の携帯型ナビゲーション装置の内部ブロック図である。
【図3】実施例の携帯型ナビゲーション装置の基準値記憶部に保持されるスペクトルピーク周波数の履歴テーブルを示す。
【図4】実施例の携帯型ナビゲーション装置の取付け状態の検出動作を示すフローチャートである。
【図5】実施例の携帯型ナビゲーション装置の基準値を予め設定するための測定装置の概略図である。
【図6】図5の測定装置を使用して測定した吸盤スタンド及び携帯型ナビゲーション装置のパワースペクトルを示す図である。
【発明を実施するための形態】
【0027】
以下、本願発明を実施するための最良の形態を実施例と共に図面を参照して詳細に説明する。ただし、以下に示す実施例は、本発明の技術思想を具体化するための携帯型電子装置として携帯型ナゲーション装置を例示して説明するものであって、本発明をこの携帯型ナゲーション装置に特定することを意図するものではなく特許請求の範囲に示した技術思想を逸脱することなくその他の携帯型電子装置にも等しく適用し得るものである。
【実施例】
【0028】
図1〜4を参照して、実施例の携帯型ナビゲーション装置における取付け状態の検出動作について説明する。なお、図1は、実施例の携帯型ナビゲーション装置を、吸盤スタンドを使用して自動車のダッシュボードに取付けた状態を示す図である。図2は、実施例の携帯型ナビゲーション装置の内部ブロック図である。図3は、実施例の携帯型ナビゲーション装置の基準値記憶部に保持されるスペクトルピーク周波数の履歴テーブルを示す図である。図4は、実施例の携帯型ナビゲーション装置の取付け状態の検出動作を示すフローチャートである。
【0029】
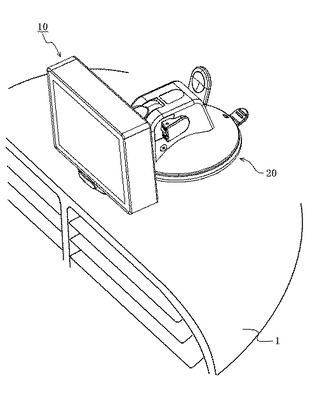
図1に示すように、自動車のダッシュボード1の上面には、吸盤スタンド20が取付けられている。吸盤スタンド20には携帯型ナビゲーション装置10が取付けられている。吸盤スタンド20は、詳細な説明は省略するが、ダッシュボード1に吸着される吸盤部分と、携帯型ナビゲーション装置10が取付けられて支持するクレードル部分(図示せず)と、吸盤部分とクレードル部分とを旋回可能に接続する接続部分とから構成される。
【0030】
吸盤部分はダッシュボード1上に吸着されると、その箇所に長時間保持され、携帯型ナビゲーション装置10を定位置に支持することが可能となる。また、接続部分を旋回させることによって携帯型ナビゲーション装置10の向きをユーザが視認や操作しやすい位置に設定することも可能である。なお、本実施例では、携帯型ナビゲーション装置10が吸盤スタンド20によってダッシュボード1に取付けられた場合を例示しているが、本発明はこれに限られず、スタンドが両面粘着テープによってダッシュボード1等の被設置面に取付けられるようにしておいてもよい。また、設置される被設置面も、ダッシュボード1に限られず、自動車内の一つであってもよい。
【0031】
なお、携帯型ナビゲーション装置10は、吸盤スタンド20への取付け取外しが可能であり、ダッシュボード1(被設置面)に取り付けられた吸盤スタンド20へ取り付けることで、スタンドによって被設置面に取外し可能に取付けられる。
【0032】
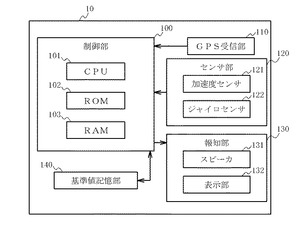
図2に示すように、携帯型ナビゲーション装置10は、制御部100、GPS受信部110、センサ部120、報知部130、基準値記憶部140を備えて構成される。
制御部100は、CPU101、ROM102、RAM103を備えて構成されるプロセッサであり、ROM102又はRAM103に記憶された制御プログラムをCPU101において実行することによって本携帯型カーナビゲーション装置10の各部の動作を制御・統括する。
【0033】
本実施例において、制御部100は主に、(1)アイドリング判定、(2)振動解析、(3)取付け状態判定、(4)報知制御、の処理を行う。
(1)アイドリング判定
制御部100は、GPS受信部110から出力されたGPS測位位置を、センサ部120からの出力に基づいて補完し、現在位置を算出する。算出した現在位置が所定時間変化せず、センサ部120を構成する加速度センサ121及び/又はジャイロセンサ122の出力が所定値以下の場合には、自動車がアイドリングしている状態であると判定する。アイドリングの判定条件として、加速度センサ121及び/又はジャイロセンサ122の出力が所定値以下であることが挙げられているのは、自動車が移動していないとしても、乗車人が乗り降りしているとき等は自動車が揺れて安定せず、以下で説明する吸盤スタンド20の取付け状態の判定を行うことはできないためである。
【0034】
なお、アイドリングの判定条件としては、上記に限ることはなく、例えば、GPS測位位置が所定時間変化しない場合、或いは、加速度センサ121及び/又はジャイロセンサ122の出力が所定値以下の場合のみでもアイドリングしている状態であると判定してもよい。また、自動車のキースイッチがON状態であるか否か(エンジン動作中か否か)を判定条件に加えてもよい。
【0035】
なお、自動車がアイドリングしている状態であるか否かを判定する理由は、後述する取付け状態判定処理において、基準値と抽出したスペクトルピーク周波数とを比較するが、この際、基準値を記憶した状態(基準値となるスペクトルピーク周波数を抽出したときの状態)と、スペクトルピーク周波数を抽出したときの状態を同一の状態とするためである。
【0036】
すなわち、自動車が走行中では、路面ノイズやエンジンの回転数により、携帯型ナビゲーション装置10(吸盤スタンド20)に加わる振動(加速度等)が異なるため、アイドリング状態を判定し、アイドリング状態のときのみ、スペクトルピーク周波数を抽出すれば、同一の状態(吸盤スタンド20に加わる振動が同じ)ときのスペクトルピーク周波数を抽出できる。そして、アイドリング状態のときのスペクトルピーク周波数を基準値として記憶し、また、アイドリング状態のときに抽出したスペクトルピーク周波数を上記基準値と比較することで、後述する取付け状態判定処理が行なわれる。
【0037】
なお、上記の通り、基準値と今回抽出したスペクトルピーク周波数が同一の状態(吸盤スタンド20に加わる振動が同じ)のときに抽出されたものであればよいため、同一の状態と判定できれば、アイドリングしている状態でなくても、走行中であってもよい。また、アイドリング状態であっても、エアコンの作動状態などにより吸盤スタンド20に加わる振動が異なることが考えられるため、携帯型ナビゲーション装置10が有線又は無線の通信手段を介して、自動車情報(エアコン作動状態、エンジン回転数など)を取得できる場合は、これらの情報をアイドリングの判定条件に加えてもよい。
【0038】
また、上記では、加速度センサ121及び/又はジャイロセンサ122の出力が所定値以下の場合に、アイドリング状態と判定することを記載したが、自動車の停止に伴いエンジンを自動的に停止させる自動車に対応するため、閾値を2つ(停車判定のための第1の閾値、及び、エンジン動作判定のための第2の閾値)設け、センサ部120(加速度センサ121及び/又はジャイロセンサ122)の出力が、第1の閾値以下であり、且つ、第2の閾値以上であるときに、アイドリングしている状態(アイドリング状態)であると判定してもよい。
(2)振動解析
制御部100は、センサ部120から出力された携帯型ナビゲーション装置10の振動値(加速度及び/又は角速度)の変化を、サンプリングする。サンプリングは、例えば、サンプリング周波数100Hzで10秒間にわたって振動値(加速度及び/又は角速度)を記録することにより行われる。また、制御部100は検出された振動値を周波数分解(離散フーリエ変換)することによって、検出された振動値を各周波数成分に分解する。そして、制御部100は周波数分解された各周波数の振動値の中から最大の振幅を示すスペクトルピーク周波数を抽出する。
(3)取付け状態判定
制御部100は、上記の振動解析処理において抽出したスペクトルピーク周波数と、基準値記憶部140に記憶された過去のスペクトルピーク周波数(履歴値)である基準値とを比較し、所定値以上異なるか否かを判定する。振動解析処理において抽出したスペクトルピーク周波数が過去のスペクトルピーク周波数から所定値以上離れているなら、制御部100は、吸盤スタンド20がダッシュボード1から落下する前の遥動状態であると判定し、所定値未満であれば、吸盤スタンド20は遥動なくダッシュボード1に取付けられていると判断する。なお、基準値は、固定時におけるスペクトルピーク周波数を、基準値記憶部140のテンプレートに基準周波数として予め設定し記憶したものであってもよい。また、基準値は、スタンドの落下直前のスペクトルピーク周波数を基準周波数として予め設定記憶したものであってもよい。この場合には、この落下直前の基準周波数に対し抽出したスペクトルピーク周波数が所定値以内に近づいたか否かで取付け状態を判定するようにしてもよい。
【0039】
さらに、制御部100は、周波数分解された振動値のうち、特定の周波数の振幅値を、基準値記憶部140に記憶された対応する特定の周波数の振幅値(基準値)と比較し、所定値以上変化したか否かで吸盤スタンド20の取付け状態を判定するようにしてもよい。基準値は、基準値記憶部140に記憶された過去の(固定時の)特定周波数における振幅値であってもよいし、特定周波数における予め設定された振幅値であってもよい。
(4)報知制御
制御部100は、上記の取付け状態判定処理において吸盤スタンド20がダッシュボード1から落下する前の遥動状態であると判断した場合に、携帯型ナビゲーション装置10の落下可能性があることを示すメッセージを生成し、報知部130に出力する。報知部130において音声として報知を行う場合、例えば、「スタンドの取付けが緩んでいる可能性があります。再度、付け直しをしてください。」といった警告メッセージを生成して報知部130に出力し、報知部130が音声出力する。
【0040】
制御部100は、また、報知部130において画像や映像として報知を行う場合は、同様の警告メッセージの表示画像や映像を生成又は表示指示を報知部130に出力し、報知部130は警告メッセージを目立つような仕方で表示する。なお、報知すべきメッセージを音声と画像や映像の両方で報知部130に出力するようにしてもよい。
【0041】
また、制御部100は、報知部130に対して報知出力を行った場合に、報知を行なったことをフラグとして保持しておき、所定時間経過後に、取付け状態判定処理を行って再度取付け状態を判定し、遥動状態や脱落前の状態が直っている場合には、「直りました」といったメッセージを報知部130に出力するようにしてもよい。
【0042】
GPS受信部110は所定の時間間隔で地球上空を周回している複数のGPS衛星から受信する時刻情報を含む電波(衛星信号)を受信し、この信号に基づいて自動車の位置情報(GPS測位位置)を算出する。
【0043】
センサ部120は、加速度センサ121とジャイロセンサ122を備えて構成される。加速度センサ121は携帯型ナビゲーション装置10に加わる加速度を測定し、その測定値を制御部100に出力する。ジャイロセンサ122は携帯型ナビゲーション装置10に加わる角速度の変化を測定し、その測定値を制御部100に出力する。なお、本実施例では、センサ部120を加速度センサ121とジャイロセンサ122によって構成したが、本発明はこれに限られず、携帯型ナビゲーション装置10の変位、速度、加速度の少なくとも一つを検出するセンサによって構成するようにしてもよい。
【0044】
報知部130は、スピーカ131と表示部132を備えて構成される。スピーカ131は、制御部100からの音声出力信号を音声に変換して出力する。表示部132は、制御部100からの警告メッセージ表示画像信号又は表示指示を受けて、表示画像を目立つような仕方で表示する。
【0045】
基準値記憶部140は、制御部100において行われる取付け状態判定処理において比較するための基準値が記憶される。本実施例において、基準値記憶部140は制御部100のROM102、RAM103とは別個の記憶手段として設けられているが、本発明はこれに限られず、制御部100のROM102やRAM103に記憶させるようにしてもよい。
【0046】
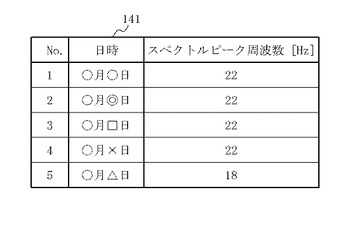
基準値は過去に制御部100により抽出されたスペクトルピーク周波数である。スペクトルピーク周波数とは、振動値を周波数分解した際に、その振動を構成する各周波数成分のうち最大の振幅を示す周波数のことである。また、基準値は、携帯型ナビゲーション装置10の安定した固定時におけるスペクトルピーク周波数をテンプレートとして出荷時に予め設定し、記憶したものでもよい。或いは、基準値は、吸盤スタンド20の落下直前のスペクトルピーク周波数を記憶したものであってもよい。又は、基準値は特定の周波数における振幅値であってもよい。これらの基準値は携帯型ナビゲーション装置10の機種毎に異なるので、出荷時に該当する機種の基準値をテンプレートとして記憶しておいてもよいが、装置の固体差やスタンドの向きによっても基準値が変化する場合があるので、履歴値を使用すると、それらの相違に対処できる。また、基準値記憶部140は、スペクトルピーク周波数の履歴値を記録した履歴テーブル141を保持してもよい。履歴テーブル141の一例を、図3に示す。
【0047】
図3に示すように、履歴テーブル141は、データ(スペクトルピーク周波数)が記録された日時と、測定されたスペクトルピーク周波数で構成されている。データは複数履歴として保持されており、所定期間間隔(アイドリング状態の判定毎)で新しいスペクトルピーク周波数を記録することによって更新され、古くなったデータは破棄されるようにしてもよい。
【0048】
なお、図3に示す履歴テーブル141を用いて取付け状態判定処理を行なう場合、直前のデータ(例えば、最後に記憶されたNo5のデータ)を基準値として用いると急激に取付け状態が変化しない限り、基準値と抽出したスペクトルピーク周波数が所定値以上離れないことが考えられる。
【0049】
そのため、履歴テーブル141を用いて取付け状態判定処理を行なう場合、基準値として用いるデータ(スペクトルピーク周波数)は、所定時間前(例えば、No2のデータ)或いは、最初に記憶したNo1のデータが好ましい。
【0050】
さらに、吸盤スタンド20を取付けるダッシュボード1の材質や場所によっても振動の状態が異なるので、基準値記憶部140には、ダッシュボード1の取付け箇所や材質毎のスペクトルピーク周波数をテンプレートとして保持しておき、ユーザが初期設定を行う際に取付け箇所を指定することで、基準値を選択設定できるようにしてもよい。なお、テンプレートの作成方法については後述する。
【0051】
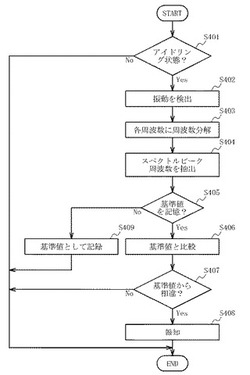
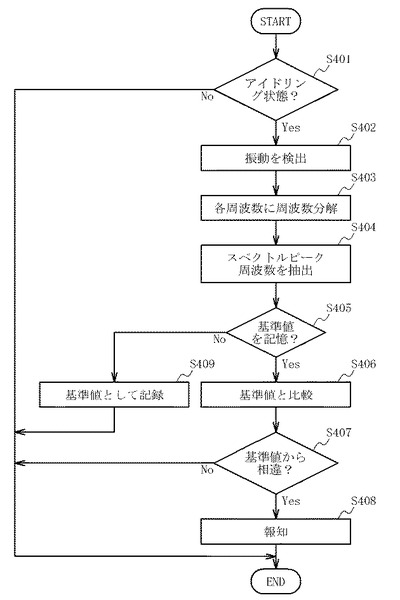
上記に説明した携帯型ナビゲーション装置10における吸盤スタンド20の取付け状態の検出動作を、図4を参照して説明する。図4のステップS401において、制御部100は、GPS受信部110によって算出されたGPS測位位置を、センサ部120からの出力に基づいて補完することによって現在位置を算出する。算出した現在位置が所定時間変化せず、また、センサ部120を構成する加速度センサ121及び/又はジャイロセンサ122の出力が所定値以下にあるか否かを判定することで、自動車が安定してアイドリングしている状態であるか否かを判定する。
【0052】
現在位置が変化している場合や、加速度センサ121及び/又はジャイロセンサ122の出力が所定値より大きい場合には、自動車は走行中か、或いはアイドリングしているとしても乗降中等の自動車が揺れていて安定していない状態であるため、吸盤スタンド20の取付け状態を判定するのには不適であるために処理を終了する。
【0053】
現在位置が変化しておらず、加速度センサ121及び/又はジャイロセンサ122の出力が所定値以下の場合には、自動車はアイドリング状態にあると判定され、ステップS402の処理に進む。
【0054】
ステップS402において、制御部100は、加速度センサ121及び/又はジャイロセンサ122からの振動値出力から振動値を取得する。そして、加速度センサ121から出力された加速度(振動値)及び/又はジャイロセンサ122から出力された角速度の値(振動値)を、所定サンプリング周波数で所定時間、例えば、サンプリング周波数100Hzで10秒間、サンプリングする。
【0055】
ステップS403において、制御部100は、ステップS402において取得・サンプリングした振動値を離散フーリエ変換処理することによって各周波数成分に分解する。
【0056】
ステップS404において、制御部100は、振動を構成する各周波数成分のうち、もっとも振幅の大きいものをスペクトルピーク周波数として抽出する。
【0057】
ステップS405において、制御部100は基準値記憶部140を参照し、基準値記憶部140に基準値が既に記憶されていたか否かを判定する。基準値が記憶されていなければステップS409の処理に進み、抽出したスペクトルピーク周波数を基準値として基準値記憶部140に記憶させる。なお、基準値は、工場出荷時に予め記憶された設定値(吸盤スタンド20の固定状態のときの振動のスペクトルピーク周波数)であってもよいし、以前に抽出し記憶させた振動のスペクトルピーク周波数であってもよい。
【0058】
ステップS405において、基準値記憶部140に基準値が既に記憶されている場合、ステップS406の処理に進む。ステップS406において、制御部100は抽出したスペクトルピーク周波数と基準値記憶部140に記憶された基準値とを比較する。
【0059】
ステップS407において、制御部100は、抽出したスペクトルピーク周波数が基準値から所定値以上離れているか否かを判定する。抽出したスペクトルピーク周波数が基準値から所定値以上離れていない場合、吸盤スタンド20がダッシュボード1にしっかりと取付けられている状態であると判断し、処理を終了する(取付けられていることを報知部を介して報知してもよい)。一方、抽出したスペクトルピーク周波数が基準値から所定値以上離れた場合、吸盤スタンド20がダッシュボード1から脱落する直前の状態であると判断し、ステップS408の処理に進む。これは、例えば、基準値が22Hzである場合、22Hzから4Hz以上離れた場合(抽出したスペクトルピーク周波数が18Hzであった場合)等である。(図6の測定結果参照)
ステップS408において、制御部100は、携帯型ナビゲーション装置10の落下可能性があることを示すメッセージを生成し、報知部130に出力し、報知部130のスピーカ131から音声として、或いは、表示部132から画像として出力し、処理を終了する。落下可能性を示すメッセージは、「スタンドの取付けが緩んでいる可能性があります。再度、付け直しをしてください。」といった警告ガイダンスを音声として放送したり、「スタンド取付け確認!」のような警告画像を表示したりするものであればよい。
【0060】
なお、制御部100は、報知部130に対して報知出力を行った場合に、報知したことをフラグとして保持しておき、所定時間経過後に、取付け状態判定処理を行い、抽出したスペクトルピーク周波数と基準値とを比較し、遥動状態や脱落前の状態が治っている場合には「直りました」といったメッセージを報知部130を介して出力するようにしてもよい。
【0061】
また、上記には、基準値は吸盤スタンド20がダッシュボード1にしっかりと取付けられている場合を示すスペクトルピーク周波数であり、この基準値に対して、測定された振動値から抽出したスペクトルピーク周波数がどの程度乖離したかによって吸盤スタンド20の遥動状態を判定してもよい。また、基準値は吸盤スタンド20がダッシュボード1から脱落する直前の周波数であり、この基準値に対して、測定された振動値から抽出されたスペクトルピーク周波数がどの程度近づいたかによって吸盤スタンド20の遥動状態を判定するようにしてもよい。
【0062】
また、基準値は、振動値を周波数分解した際の、特定の周波数における振幅値であってもよい。その場合、その特定の周波数の振幅値を振動値から抽出し、基準値と比較を行う。
【0063】
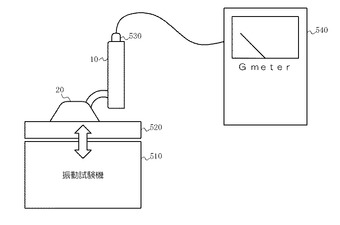
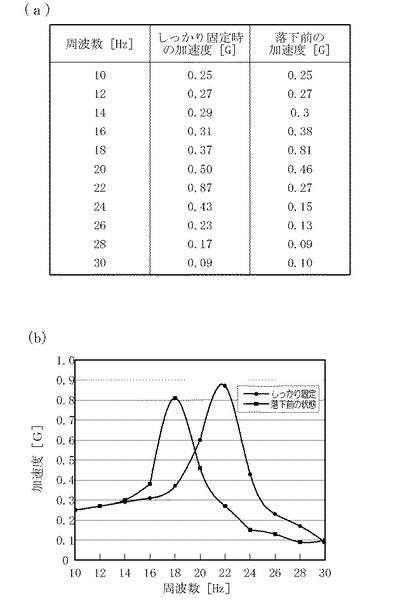
次に、図5、図6を参照して、携帯型ナビゲーション装置10のスペクトル周波数を予め設定するための測定について説明する。なお、図5は実施例の携帯型ナビゲーション装置10の基準値を予め設定するための測定装置の概略図である。図6は、図5の測定装置を使用して測定した吸盤スタンド20及び携帯型ナビゲーション装置10のパワースペクトルを示す図である。
【0064】
振動値の測定に先立ち、携帯型ナビゲーション装置10を吸盤スタンド20に取付ける。振動試験機510は加振テーブル520を備える。加振テーブル520の上面に、携帯型ナビゲーション装置10が接続されている吸盤スタンド20をしっかりと取付ける。携帯型ナビゲーション装置10の上面に加速度ピックアップ530を密着させ、必要であれば接着剤等で固定する。加速度ピックアップ530をGメータ540(加速度計)に接続し、加速度ピックアップ530で検出される振動レベルをGメータ540において測定できるようにする。
【0065】
上記のようにして構成された測定装置を使用して、振動試験を行う。振動試験は、例えば、吸盤スタンド20及び携帯型ナビゲーション装置10の取付け姿勢に対して上下方向の単振動を与える方法で行い、さらに、振動周波数を、最小振動周波数5Hz、最大振動周波数50Hzの間を、10秒間で1往復するように変化させながら、加振テーブル520を振動させることにより行う。
【0066】
次に、加振テーブル520の上面に、携帯型ナビゲーション装置10が接続されている吸盤スタンド20を脱落前の状態にして取付け、上記のような振動試験を行う。
【0067】
Gメータ540において測定された加速度値に基づいて周波数毎の加速度値を抽出し、図6に示すようなパワースペクトルを得る。すると、吸盤スタンド20がしっかりと取付けられている場合は、スペクトルピーク周波数は約22Hzであり、吸盤スタンド20が脱落直前の状態ではスペクトルピーク周波数は18Hzであることが分かる。そこで、吸盤スタンド20の固定状態におけるスペクトルピーク周波数を、予め設定された基準値として基準値記憶部140に記憶する。或いは、基準値は、吸盤スタンド20の脱落直前の状態におけるスペクトルピーク周波数であってもよい。
【0068】
或いは、基準値記憶部140に設定される基準値は、特定の周波数、例えば、22Hzにおける加速度値であってもよい。この場合、制御部100が取付け状態判定処理を行う際に、22Hzにおける加速度値が0.87Gであればしっかり取付けられていると判断し、この加速度値からどの程度離れたか(吸盤スタンド20が脱落前の加速度値である0.27Gにどの程度近づいたか)に基いて吸盤スタンド20の取付け状態を判定する。
【0069】
なお、基準値として、特定の周波数、例えば、22Hzにおける加速度値を用いる場合、アイドリング状態であっても、自動車が坂道で停車している場合であれば、坂道の傾斜により、加速度値が増加、減衰することが考えられるため、アイドリング状態であっても、坂道であれば取付け状態処理を行なわないことが好ましい。坂道か否かは種々の方法で判定できるが、例えば、GPS測位位置や地図情報(図示しない地図記憶部に記憶)に基づいてマップマッチング処理を行なう際に、地図情報に坂道の情報(勾配など)が含まれる場合、マップマッチング処理した現在位置の勾配を参照することで判定できる。
【0070】
なお、上記実施例では、スタンドとして吸盤スタンド20を例示したが、両面テープを用いるスタンドなどであってもよい。
【0071】
さらに、上記実施例では、携帯型ナビゲーション装置10が吸盤スタンド20に揺動なく取付けられており、吸盤スタンド20の被設置面(ダッシュボード1)への取付け状態を判定する例を示したが、同様の方法で、携帯型ナビゲーション装置10の吸盤スタンド20への取付け状態を判定することも可能である。
【0072】
すなわち、基準値と抽出したスペクトルピーク周波数が所定値以上離れている場合とは、吸盤スタンド20が揺動なく被設置面(ダッシュボード1)に取付けられていない場合と、携帯型ナビゲーション装置10が揺動なく吸盤スタンド20に取付けられていない場合が考えられる。
【0073】
そのため、例えば、図4のS408の処理において、制御部100は、吸盤スタンド20が被設置面(ダッシュボード1)から落下する危険性があること、及び、携帯型ナビゲーション装置10が吸盤スタンド20から落下する危険性があることを示すメッセージを生成し、報知部130に出力し、報知部130のスピーカ131から音声として、或いは、表示部132から画像として出力してもよい。落下可能性を示すメッセージは、「ダッシュボードへのスタンドの取付け、又は、スタンドへのナビゲーションの取り付けが緩んでいる可能性があります。再度、付け直しをしてください。」といった警告ガイダンスを音声として放送したり、「スタンド取付け、ナビゲーション取付け確認!」のような警告画像を表示したりするものであればよい。
【0074】
また、吸盤スタンド20が被設置面(ダッシュボード1)に揺動なく取付けられている場合(固定されている場合)であれば、基準値と抽出したスペクトルピーク周波数が所定値以上離れている場合とは、携帯型ナビゲーション装置10が揺動なく吸盤スタンド20に取付けられていない場合であるため、例えば、図4のS408の処理において、制御部100は、携帯型ナビゲーション装置10が吸盤スタンド20から落下する危険性があることを示すメッセージを生成し、報知部130に出力し、報知部130のスピーカ131から音声として、或いは、表示部132から画像として出力してもよい。落下可能性を示すメッセージは、「スタンドへのナビゲーションの取り付けが緩んでいる可能性があります。再度、付け直しをしてください。」といった警告ガイダンスを音声として放送したり、「ナビゲーションの取付け確認!」のような警告画像を表示したりするものであればよい。
【0075】
なお、上記の携帯型ナビゲーション装置10が揺動なく吸盤スタンド20に取付けられているか否かの判定(取付け状態の判定)、並びに、携帯型ナビゲーション装置10が揺動なく吸盤スタンド20に取付けられているか否かの判定(取付け状態の判定)及び吸盤スタンド20が被設置面(ダッシュボード1)に揺動なく取付けられているか否かの判定(取付け状態の判定)は、上記実施例と記載した方法の何れを用いても構わない。
【0076】
また、取付け状態が揺動していると判定して(基準値と抽出したスペクトルピーク周波数が所定値以上離れている場合)落下可能性を示すメッセージを報知部130を介して出力した後に、取付け状態が揺動していないと判定した場合(基準値と抽出したスペクトルピーク周波数が所定値以上離れていない場合)、落下の危険性が解消されたことを示すメッセージを報知部130を介して出力してもよい。
【符号の説明】
【0077】
1 ダッシュボード
10 携帯型ナビゲーション装置
20 吸盤スタンド
100 制御部
101 CPU
102 ROM
103 RAM
110 GPS受信部
120 センサ部
121 加速度センサ
122 ジャイロセンサ
130 報知部
131 スピーカ
132 表示部
140 基準値記憶部
【技術分野】
【0001】
本発明は、スタンドによって被設置面に取り付けられる携帯型電子装置、特に、携帯型電子装置における振動の状態を判定することによって取付け状態を判定し、脱落しそうな場合に報知することで脱落防止を図る携帯型電子装置に関する。
【背景技術】
【0002】
携帯型のナビゲーション装置等の携帯型電子装置は、従来、スタンドによって自動車等のダッシュボード等に取外し可能に取付けられていた。スタンドは、通常、ねじや両面粘着テープ等によってダッシュボードに固定されていた。
【0003】
ねじによってダッシュボードに固定されたスタンドは、一度固定すると、ねじを取外さなければならず、取外して移動させることは手間のかかる作業であった。また、両面粘着テープによって固定された場合も、一旦固定してしまった場合は、両面粘着テープを剥がしたりするのは手間がかかり、しかも、両面粘着テープをきれいに剥がすことができず、ダッシュボードに接着跡が残ってしまうこともあった。
【0004】
そこで、下記特許文献1(特開2008−239100号公報)は、携帯型電子装置をダッシュボード等に固定するためのスタンドを、ねじや両面粘着テープに代えて、吸着面を有する吸盤を備える構成としている。吸盤を使用することによって、このスタンドを備える携帯型電子装置の取外し操作は簡単になり、ユーザは所望の位置へ簡単に取付け、取外しを行うとともに取付け位置の移動を行うことが容易にできるようになる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−239100号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、両面粘着テープや吸盤が取付けられるダッシュボード等の被設置面は、自動車の走行時には定常的に振動にさらされるだけでなく、高温や低温にもさらされる。そのため、両面粘着テープや吸盤を使用してスタンドをダッシュボード等の被設置面に取付けた場合、両面粘着テープや吸盤の吸着力は次第に弱くなり、スタンドはある時点で取付けられた位置から脱落することがある。取付け箇所から脱落するなら、それによって支持されていた携帯型電子装置が車内に落下し、装置が損傷したり、人体を傷つけたり、運転に支障をきたしたりする恐れがある。
【0007】
そこで、本発明の目的は、スタンドによって自動車のダッシュボード等の被設置面に取付けられる携帯型電子装置において、被設置面へのスタンドの取付け状態及び/又はスタンドへの携帯型電子機器の取付け状態を監視し、脱落しそうな状態であれば報知することによって、脱落防止を図ることである。
【課題を解決するための手段】
【0008】
上記課題を解決するため本発明の携帯型電子装置は、スタンドに取外し可能に取付けられる携帯型電子装置であって、前記携帯型電子装置は、基準値を記憶する基準値記憶部と、報知部と、前記携帯型電子装置に加わる振動値を検出するセンサ部と、前記振動値と前記基準値とに基づいて前記スタンドへの前記携帯型電子装置の取付け状態を判定し、前記取り付け状態に基づく報知メッセージを前記報知部を介して出力する制御部と、を備えることを特徴とする。
【0009】
上記課題を解決するため本発明の携帯型電子装置は、スタンドによって被設置面に取外し可能に取付けられる携帯型電子装置であって、前記携帯型電子装置は、基準値を記憶する基準値記憶部と、報知部と、前記携帯型電子装置に加わる振動値を検出するセンサ部と、前記振動値と前記基準値とに基づいて前記被設置面へのスタンドの取付け状態を判定し、前記取り付け状態に基づく報知メッセージを前記報知部を介して出力する制御部と、を備えることを特徴とする。
【0010】
上記課題を解決するため本発明の携帯型電子装置は、スタンドによって被設置面に取外し可能に取付けられる携帯型電子装置であって、前記携帯型電子装置は、基準値を記憶する基準値記憶部と、報知部と、前記携帯型電子装置に加わる振動値を検出するセンサ部と、前記振動値と前記基準値とに基づいて前記被設置面へのスタンドの取付け状態及び前記スタンドへの前記携帯型電子機器の取付け状態を判定し、前記取り付け状態に基づく報知メッセージを前記報知部を介して出力する制御部と、を備えることを特徴とする。
【0011】
また、本発明の携帯型電子装置において、前記制御部は、前記センサ部により検出された振動値を周波数分解し、前記周波数分解した振動値と前記基準値とに基づいて前記取付け状態を判定することを特徴とする。
【0012】
また、本発明の携帯型電子装置において、前記基準値は、基準周波数であり、前記制御部は、前記周波数分解した振動値からスペクトルピーク周波数を算出し、前記基準周波数と前記スペクトルピーク周波数とを比較することにより、前記取り付け状態を判定することを特徴とする。
【0013】
また、本発明の携帯型電子装置において、前記基準周波数は、前記スペクトルピーク周波数の履歴値であることを特徴とする。
【0014】
また、本発明の携帯型電子装置において、前記基準値は、特定の周波数における振幅値の大きさであり、前記制御部は、前記周波数分解した振動値のうちの前記特定の周波数における振幅値の大きさと前記基準値である特定の周波数における振幅値の大きさとを比較することにより、前記取り付け状態を判定することを特徴とする。
【0015】
また、本発明の携帯型電子装置において、前記制御部は、前記振動値と前記基準値とに基づいて前記スタンドが遥動なく前記被設置面に取り付けられているか否かを判定し、前記スタンドが遥動なく前記被設置面に取り付けられていないと判定した場合に、前記スタンドの脱落の危険性を示す報知メッセージを前記報知部を介して出力することを特徴とする。
【0016】
また、本発明の携帯型電子装置において、前記制御部は、前記スタンドが遥動していると判定し、前記報知部に前記報知メッセージを出力した後に、前記スタンドが遥動していないと判定した場合、前記スタンドの脱落の危険性が解消されたことを示すメッセージを前記報知部を介して出力することを特徴とする。
【0017】
また、本発明の携帯型電子装置において、前記スタンドが取り付けられる被設置面は自動車に設けられており、前記制御部は前記自動車がアイドリング状態か否かを判定し、前記自動車がアイドリング状態である場合に、前記センサ部により検出された振動値を周波数分解することを特徴とする。
【発明の効果】
【0018】
上記手段により本発明は以下に説明する優れた効果を発揮する。すなわち、本発明の携帯型電子装置によれば、携帯型電子装置に加わる振動値、つまり、角速度や加速度を測定し、測定された振動値と基準値とを比較することによってスタンドが被設置面にしっかりと取り付けられているかそれとも不安定な状態であるか、及び/又は、携帯型電子機器がスタンドにしっかりと取り付けられているかそれとも不安定な状態であるかを判定できるようになる。これにより、取付け状態を監視することが可能となり、必要な報知メッセージを出力することで脱落防止を図ることが可能となる。
【0019】
本発明の携帯型電子装置の一態様によれば、振動値を周波数分解し、周波数分解された振動値と基準値とに基づいて取付け状態を判定することが可能となる。
【0020】
本発明の携帯型電子装置の一態様によれば、基準周波数と周波数分解された振動値のスペクトルピーク周波数とを比較することによって取付け状態を判定する。携帯型電子装置では、スタンドによる被設置面への取付け状態、及び/又は携帯型電子装置のスタンドへの取付け状態によってスペクトルピーク周波数が変化するから、スペクトルピーク周波数の変化を監視することで、取付け状態を信頼度よく判定することが可能となる。
【0021】
本発明の携帯型電子装置の一態様によれば、基準周波数は、この装置において測定された振動値のスペクトルピーク周波数の履歴値である。振動値のスペクトルピーク周波数は、携帯型電子装置の種類や個体差だけでなく、取付けるスタンドの種類、スタンドの向き、被設置面の状態、等の要素に依存するので、履歴値を基準値として記録すれば、最初にしっかりと取付けられた状態のスペクトルピーク周波数を取付け状態を判定するための基準とすることができる。これにより、常に、しっかりと取付けられたときの状態に比べてスペクトルピーク周波数がどれだけ変化したかに基づいて取付け状態を判定することができるようになる。
【0022】
本発明の携帯型電子装置の一態様によれば、基準値である特定の周波数における振幅値の大きさと、周波数分解された振動値の特定の周波数における振幅値の大きさを比較することによって取付け状態を判定する。スタンドによって被設置面に取付けられる携帯型電子装置では、取付け状態によって特定の周波数における振幅値の大きさが変化するから、特定の周波数における振幅値の大きさの変化を監視することで、取付け状態を信頼度よく判定することが可能となる。
【0023】
本発明の携帯型電子装置の一態様によれば、スタンドが遥動なくしっかりと被設置面に取付けられているか否かを判定し、遥動なく被設置面に取付けられていない場合には、スタンド脱落の危険を示す報知メッセージを出力する。これにより、スタンドの取付けをユーザに促し、スタンドの脱落防止を図ることが可能となる。
【0024】
本発明の携帯型電子装置の一態様によれば、スタンド脱落の危険を示す報知メッセージを出力した後、スタンドの取付け状態を再度判定し、スタンドが遥動していない場合には、スタンド脱落の危険性が解消されたことを示すメッセージを出力する。これにより、スタンドが正しく取付けられたことをユーザが認識することが可能となる。
【0025】
本発明の携帯型電子装置の一態様によれば、この装置はスタンドによって自動車に設けられた被設置面に取付けられるものであり、アイドリング状態を判定し、アイドリング状態のときの振動値を用いて取付け状態を判定する。これにより、自動車の走行時等の不安定状態ではなく安定した状態のときに取付け状態を判定することが可能となり、取付け状態の判定を精度よく行うことが可能となる。
【図面の簡単な説明】
【0026】
【図1】実施例の携帯型ナビゲーション装置を、吸盤スタンドを使用して自動車のダッシュボードに取付けた状態を示す図である。
【図2】実施例の携帯型ナビゲーション装置の内部ブロック図である。
【図3】実施例の携帯型ナビゲーション装置の基準値記憶部に保持されるスペクトルピーク周波数の履歴テーブルを示す。
【図4】実施例の携帯型ナビゲーション装置の取付け状態の検出動作を示すフローチャートである。
【図5】実施例の携帯型ナビゲーション装置の基準値を予め設定するための測定装置の概略図である。
【図6】図5の測定装置を使用して測定した吸盤スタンド及び携帯型ナビゲーション装置のパワースペクトルを示す図である。
【発明を実施するための形態】
【0027】
以下、本願発明を実施するための最良の形態を実施例と共に図面を参照して詳細に説明する。ただし、以下に示す実施例は、本発明の技術思想を具体化するための携帯型電子装置として携帯型ナゲーション装置を例示して説明するものであって、本発明をこの携帯型ナゲーション装置に特定することを意図するものではなく特許請求の範囲に示した技術思想を逸脱することなくその他の携帯型電子装置にも等しく適用し得るものである。
【実施例】
【0028】
図1〜4を参照して、実施例の携帯型ナビゲーション装置における取付け状態の検出動作について説明する。なお、図1は、実施例の携帯型ナビゲーション装置を、吸盤スタンドを使用して自動車のダッシュボードに取付けた状態を示す図である。図2は、実施例の携帯型ナビゲーション装置の内部ブロック図である。図3は、実施例の携帯型ナビゲーション装置の基準値記憶部に保持されるスペクトルピーク周波数の履歴テーブルを示す図である。図4は、実施例の携帯型ナビゲーション装置の取付け状態の検出動作を示すフローチャートである。
【0029】
図1に示すように、自動車のダッシュボード1の上面には、吸盤スタンド20が取付けられている。吸盤スタンド20には携帯型ナビゲーション装置10が取付けられている。吸盤スタンド20は、詳細な説明は省略するが、ダッシュボード1に吸着される吸盤部分と、携帯型ナビゲーション装置10が取付けられて支持するクレードル部分(図示せず)と、吸盤部分とクレードル部分とを旋回可能に接続する接続部分とから構成される。
【0030】
吸盤部分はダッシュボード1上に吸着されると、その箇所に長時間保持され、携帯型ナビゲーション装置10を定位置に支持することが可能となる。また、接続部分を旋回させることによって携帯型ナビゲーション装置10の向きをユーザが視認や操作しやすい位置に設定することも可能である。なお、本実施例では、携帯型ナビゲーション装置10が吸盤スタンド20によってダッシュボード1に取付けられた場合を例示しているが、本発明はこれに限られず、スタンドが両面粘着テープによってダッシュボード1等の被設置面に取付けられるようにしておいてもよい。また、設置される被設置面も、ダッシュボード1に限られず、自動車内の一つであってもよい。
【0031】
なお、携帯型ナビゲーション装置10は、吸盤スタンド20への取付け取外しが可能であり、ダッシュボード1(被設置面)に取り付けられた吸盤スタンド20へ取り付けることで、スタンドによって被設置面に取外し可能に取付けられる。
【0032】
図2に示すように、携帯型ナビゲーション装置10は、制御部100、GPS受信部110、センサ部120、報知部130、基準値記憶部140を備えて構成される。
制御部100は、CPU101、ROM102、RAM103を備えて構成されるプロセッサであり、ROM102又はRAM103に記憶された制御プログラムをCPU101において実行することによって本携帯型カーナビゲーション装置10の各部の動作を制御・統括する。
【0033】
本実施例において、制御部100は主に、(1)アイドリング判定、(2)振動解析、(3)取付け状態判定、(4)報知制御、の処理を行う。
(1)アイドリング判定
制御部100は、GPS受信部110から出力されたGPS測位位置を、センサ部120からの出力に基づいて補完し、現在位置を算出する。算出した現在位置が所定時間変化せず、センサ部120を構成する加速度センサ121及び/又はジャイロセンサ122の出力が所定値以下の場合には、自動車がアイドリングしている状態であると判定する。アイドリングの判定条件として、加速度センサ121及び/又はジャイロセンサ122の出力が所定値以下であることが挙げられているのは、自動車が移動していないとしても、乗車人が乗り降りしているとき等は自動車が揺れて安定せず、以下で説明する吸盤スタンド20の取付け状態の判定を行うことはできないためである。
【0034】
なお、アイドリングの判定条件としては、上記に限ることはなく、例えば、GPS測位位置が所定時間変化しない場合、或いは、加速度センサ121及び/又はジャイロセンサ122の出力が所定値以下の場合のみでもアイドリングしている状態であると判定してもよい。また、自動車のキースイッチがON状態であるか否か(エンジン動作中か否か)を判定条件に加えてもよい。
【0035】
なお、自動車がアイドリングしている状態であるか否かを判定する理由は、後述する取付け状態判定処理において、基準値と抽出したスペクトルピーク周波数とを比較するが、この際、基準値を記憶した状態(基準値となるスペクトルピーク周波数を抽出したときの状態)と、スペクトルピーク周波数を抽出したときの状態を同一の状態とするためである。
【0036】
すなわち、自動車が走行中では、路面ノイズやエンジンの回転数により、携帯型ナビゲーション装置10(吸盤スタンド20)に加わる振動(加速度等)が異なるため、アイドリング状態を判定し、アイドリング状態のときのみ、スペクトルピーク周波数を抽出すれば、同一の状態(吸盤スタンド20に加わる振動が同じ)ときのスペクトルピーク周波数を抽出できる。そして、アイドリング状態のときのスペクトルピーク周波数を基準値として記憶し、また、アイドリング状態のときに抽出したスペクトルピーク周波数を上記基準値と比較することで、後述する取付け状態判定処理が行なわれる。
【0037】
なお、上記の通り、基準値と今回抽出したスペクトルピーク周波数が同一の状態(吸盤スタンド20に加わる振動が同じ)のときに抽出されたものであればよいため、同一の状態と判定できれば、アイドリングしている状態でなくても、走行中であってもよい。また、アイドリング状態であっても、エアコンの作動状態などにより吸盤スタンド20に加わる振動が異なることが考えられるため、携帯型ナビゲーション装置10が有線又は無線の通信手段を介して、自動車情報(エアコン作動状態、エンジン回転数など)を取得できる場合は、これらの情報をアイドリングの判定条件に加えてもよい。
【0038】
また、上記では、加速度センサ121及び/又はジャイロセンサ122の出力が所定値以下の場合に、アイドリング状態と判定することを記載したが、自動車の停止に伴いエンジンを自動的に停止させる自動車に対応するため、閾値を2つ(停車判定のための第1の閾値、及び、エンジン動作判定のための第2の閾値)設け、センサ部120(加速度センサ121及び/又はジャイロセンサ122)の出力が、第1の閾値以下であり、且つ、第2の閾値以上であるときに、アイドリングしている状態(アイドリング状態)であると判定してもよい。
(2)振動解析
制御部100は、センサ部120から出力された携帯型ナビゲーション装置10の振動値(加速度及び/又は角速度)の変化を、サンプリングする。サンプリングは、例えば、サンプリング周波数100Hzで10秒間にわたって振動値(加速度及び/又は角速度)を記録することにより行われる。また、制御部100は検出された振動値を周波数分解(離散フーリエ変換)することによって、検出された振動値を各周波数成分に分解する。そして、制御部100は周波数分解された各周波数の振動値の中から最大の振幅を示すスペクトルピーク周波数を抽出する。
(3)取付け状態判定
制御部100は、上記の振動解析処理において抽出したスペクトルピーク周波数と、基準値記憶部140に記憶された過去のスペクトルピーク周波数(履歴値)である基準値とを比較し、所定値以上異なるか否かを判定する。振動解析処理において抽出したスペクトルピーク周波数が過去のスペクトルピーク周波数から所定値以上離れているなら、制御部100は、吸盤スタンド20がダッシュボード1から落下する前の遥動状態であると判定し、所定値未満であれば、吸盤スタンド20は遥動なくダッシュボード1に取付けられていると判断する。なお、基準値は、固定時におけるスペクトルピーク周波数を、基準値記憶部140のテンプレートに基準周波数として予め設定し記憶したものであってもよい。また、基準値は、スタンドの落下直前のスペクトルピーク周波数を基準周波数として予め設定記憶したものであってもよい。この場合には、この落下直前の基準周波数に対し抽出したスペクトルピーク周波数が所定値以内に近づいたか否かで取付け状態を判定するようにしてもよい。
【0039】
さらに、制御部100は、周波数分解された振動値のうち、特定の周波数の振幅値を、基準値記憶部140に記憶された対応する特定の周波数の振幅値(基準値)と比較し、所定値以上変化したか否かで吸盤スタンド20の取付け状態を判定するようにしてもよい。基準値は、基準値記憶部140に記憶された過去の(固定時の)特定周波数における振幅値であってもよいし、特定周波数における予め設定された振幅値であってもよい。
(4)報知制御
制御部100は、上記の取付け状態判定処理において吸盤スタンド20がダッシュボード1から落下する前の遥動状態であると判断した場合に、携帯型ナビゲーション装置10の落下可能性があることを示すメッセージを生成し、報知部130に出力する。報知部130において音声として報知を行う場合、例えば、「スタンドの取付けが緩んでいる可能性があります。再度、付け直しをしてください。」といった警告メッセージを生成して報知部130に出力し、報知部130が音声出力する。
【0040】
制御部100は、また、報知部130において画像や映像として報知を行う場合は、同様の警告メッセージの表示画像や映像を生成又は表示指示を報知部130に出力し、報知部130は警告メッセージを目立つような仕方で表示する。なお、報知すべきメッセージを音声と画像や映像の両方で報知部130に出力するようにしてもよい。
【0041】
また、制御部100は、報知部130に対して報知出力を行った場合に、報知を行なったことをフラグとして保持しておき、所定時間経過後に、取付け状態判定処理を行って再度取付け状態を判定し、遥動状態や脱落前の状態が直っている場合には、「直りました」といったメッセージを報知部130に出力するようにしてもよい。
【0042】
GPS受信部110は所定の時間間隔で地球上空を周回している複数のGPS衛星から受信する時刻情報を含む電波(衛星信号)を受信し、この信号に基づいて自動車の位置情報(GPS測位位置)を算出する。
【0043】
センサ部120は、加速度センサ121とジャイロセンサ122を備えて構成される。加速度センサ121は携帯型ナビゲーション装置10に加わる加速度を測定し、その測定値を制御部100に出力する。ジャイロセンサ122は携帯型ナビゲーション装置10に加わる角速度の変化を測定し、その測定値を制御部100に出力する。なお、本実施例では、センサ部120を加速度センサ121とジャイロセンサ122によって構成したが、本発明はこれに限られず、携帯型ナビゲーション装置10の変位、速度、加速度の少なくとも一つを検出するセンサによって構成するようにしてもよい。
【0044】
報知部130は、スピーカ131と表示部132を備えて構成される。スピーカ131は、制御部100からの音声出力信号を音声に変換して出力する。表示部132は、制御部100からの警告メッセージ表示画像信号又は表示指示を受けて、表示画像を目立つような仕方で表示する。
【0045】
基準値記憶部140は、制御部100において行われる取付け状態判定処理において比較するための基準値が記憶される。本実施例において、基準値記憶部140は制御部100のROM102、RAM103とは別個の記憶手段として設けられているが、本発明はこれに限られず、制御部100のROM102やRAM103に記憶させるようにしてもよい。
【0046】
基準値は過去に制御部100により抽出されたスペクトルピーク周波数である。スペクトルピーク周波数とは、振動値を周波数分解した際に、その振動を構成する各周波数成分のうち最大の振幅を示す周波数のことである。また、基準値は、携帯型ナビゲーション装置10の安定した固定時におけるスペクトルピーク周波数をテンプレートとして出荷時に予め設定し、記憶したものでもよい。或いは、基準値は、吸盤スタンド20の落下直前のスペクトルピーク周波数を記憶したものであってもよい。又は、基準値は特定の周波数における振幅値であってもよい。これらの基準値は携帯型ナビゲーション装置10の機種毎に異なるので、出荷時に該当する機種の基準値をテンプレートとして記憶しておいてもよいが、装置の固体差やスタンドの向きによっても基準値が変化する場合があるので、履歴値を使用すると、それらの相違に対処できる。また、基準値記憶部140は、スペクトルピーク周波数の履歴値を記録した履歴テーブル141を保持してもよい。履歴テーブル141の一例を、図3に示す。
【0047】
図3に示すように、履歴テーブル141は、データ(スペクトルピーク周波数)が記録された日時と、測定されたスペクトルピーク周波数で構成されている。データは複数履歴として保持されており、所定期間間隔(アイドリング状態の判定毎)で新しいスペクトルピーク周波数を記録することによって更新され、古くなったデータは破棄されるようにしてもよい。
【0048】
なお、図3に示す履歴テーブル141を用いて取付け状態判定処理を行なう場合、直前のデータ(例えば、最後に記憶されたNo5のデータ)を基準値として用いると急激に取付け状態が変化しない限り、基準値と抽出したスペクトルピーク周波数が所定値以上離れないことが考えられる。
【0049】
そのため、履歴テーブル141を用いて取付け状態判定処理を行なう場合、基準値として用いるデータ(スペクトルピーク周波数)は、所定時間前(例えば、No2のデータ)或いは、最初に記憶したNo1のデータが好ましい。
【0050】
さらに、吸盤スタンド20を取付けるダッシュボード1の材質や場所によっても振動の状態が異なるので、基準値記憶部140には、ダッシュボード1の取付け箇所や材質毎のスペクトルピーク周波数をテンプレートとして保持しておき、ユーザが初期設定を行う際に取付け箇所を指定することで、基準値を選択設定できるようにしてもよい。なお、テンプレートの作成方法については後述する。
【0051】
上記に説明した携帯型ナビゲーション装置10における吸盤スタンド20の取付け状態の検出動作を、図4を参照して説明する。図4のステップS401において、制御部100は、GPS受信部110によって算出されたGPS測位位置を、センサ部120からの出力に基づいて補完することによって現在位置を算出する。算出した現在位置が所定時間変化せず、また、センサ部120を構成する加速度センサ121及び/又はジャイロセンサ122の出力が所定値以下にあるか否かを判定することで、自動車が安定してアイドリングしている状態であるか否かを判定する。
【0052】
現在位置が変化している場合や、加速度センサ121及び/又はジャイロセンサ122の出力が所定値より大きい場合には、自動車は走行中か、或いはアイドリングしているとしても乗降中等の自動車が揺れていて安定していない状態であるため、吸盤スタンド20の取付け状態を判定するのには不適であるために処理を終了する。
【0053】
現在位置が変化しておらず、加速度センサ121及び/又はジャイロセンサ122の出力が所定値以下の場合には、自動車はアイドリング状態にあると判定され、ステップS402の処理に進む。
【0054】
ステップS402において、制御部100は、加速度センサ121及び/又はジャイロセンサ122からの振動値出力から振動値を取得する。そして、加速度センサ121から出力された加速度(振動値)及び/又はジャイロセンサ122から出力された角速度の値(振動値)を、所定サンプリング周波数で所定時間、例えば、サンプリング周波数100Hzで10秒間、サンプリングする。
【0055】
ステップS403において、制御部100は、ステップS402において取得・サンプリングした振動値を離散フーリエ変換処理することによって各周波数成分に分解する。
【0056】
ステップS404において、制御部100は、振動を構成する各周波数成分のうち、もっとも振幅の大きいものをスペクトルピーク周波数として抽出する。
【0057】
ステップS405において、制御部100は基準値記憶部140を参照し、基準値記憶部140に基準値が既に記憶されていたか否かを判定する。基準値が記憶されていなければステップS409の処理に進み、抽出したスペクトルピーク周波数を基準値として基準値記憶部140に記憶させる。なお、基準値は、工場出荷時に予め記憶された設定値(吸盤スタンド20の固定状態のときの振動のスペクトルピーク周波数)であってもよいし、以前に抽出し記憶させた振動のスペクトルピーク周波数であってもよい。
【0058】
ステップS405において、基準値記憶部140に基準値が既に記憶されている場合、ステップS406の処理に進む。ステップS406において、制御部100は抽出したスペクトルピーク周波数と基準値記憶部140に記憶された基準値とを比較する。
【0059】
ステップS407において、制御部100は、抽出したスペクトルピーク周波数が基準値から所定値以上離れているか否かを判定する。抽出したスペクトルピーク周波数が基準値から所定値以上離れていない場合、吸盤スタンド20がダッシュボード1にしっかりと取付けられている状態であると判断し、処理を終了する(取付けられていることを報知部を介して報知してもよい)。一方、抽出したスペクトルピーク周波数が基準値から所定値以上離れた場合、吸盤スタンド20がダッシュボード1から脱落する直前の状態であると判断し、ステップS408の処理に進む。これは、例えば、基準値が22Hzである場合、22Hzから4Hz以上離れた場合(抽出したスペクトルピーク周波数が18Hzであった場合)等である。(図6の測定結果参照)
ステップS408において、制御部100は、携帯型ナビゲーション装置10の落下可能性があることを示すメッセージを生成し、報知部130に出力し、報知部130のスピーカ131から音声として、或いは、表示部132から画像として出力し、処理を終了する。落下可能性を示すメッセージは、「スタンドの取付けが緩んでいる可能性があります。再度、付け直しをしてください。」といった警告ガイダンスを音声として放送したり、「スタンド取付け確認!」のような警告画像を表示したりするものであればよい。
【0060】
なお、制御部100は、報知部130に対して報知出力を行った場合に、報知したことをフラグとして保持しておき、所定時間経過後に、取付け状態判定処理を行い、抽出したスペクトルピーク周波数と基準値とを比較し、遥動状態や脱落前の状態が治っている場合には「直りました」といったメッセージを報知部130を介して出力するようにしてもよい。
【0061】
また、上記には、基準値は吸盤スタンド20がダッシュボード1にしっかりと取付けられている場合を示すスペクトルピーク周波数であり、この基準値に対して、測定された振動値から抽出したスペクトルピーク周波数がどの程度乖離したかによって吸盤スタンド20の遥動状態を判定してもよい。また、基準値は吸盤スタンド20がダッシュボード1から脱落する直前の周波数であり、この基準値に対して、測定された振動値から抽出されたスペクトルピーク周波数がどの程度近づいたかによって吸盤スタンド20の遥動状態を判定するようにしてもよい。
【0062】
また、基準値は、振動値を周波数分解した際の、特定の周波数における振幅値であってもよい。その場合、その特定の周波数の振幅値を振動値から抽出し、基準値と比較を行う。
【0063】
次に、図5、図6を参照して、携帯型ナビゲーション装置10のスペクトル周波数を予め設定するための測定について説明する。なお、図5は実施例の携帯型ナビゲーション装置10の基準値を予め設定するための測定装置の概略図である。図6は、図5の測定装置を使用して測定した吸盤スタンド20及び携帯型ナビゲーション装置10のパワースペクトルを示す図である。
【0064】
振動値の測定に先立ち、携帯型ナビゲーション装置10を吸盤スタンド20に取付ける。振動試験機510は加振テーブル520を備える。加振テーブル520の上面に、携帯型ナビゲーション装置10が接続されている吸盤スタンド20をしっかりと取付ける。携帯型ナビゲーション装置10の上面に加速度ピックアップ530を密着させ、必要であれば接着剤等で固定する。加速度ピックアップ530をGメータ540(加速度計)に接続し、加速度ピックアップ530で検出される振動レベルをGメータ540において測定できるようにする。
【0065】
上記のようにして構成された測定装置を使用して、振動試験を行う。振動試験は、例えば、吸盤スタンド20及び携帯型ナビゲーション装置10の取付け姿勢に対して上下方向の単振動を与える方法で行い、さらに、振動周波数を、最小振動周波数5Hz、最大振動周波数50Hzの間を、10秒間で1往復するように変化させながら、加振テーブル520を振動させることにより行う。
【0066】
次に、加振テーブル520の上面に、携帯型ナビゲーション装置10が接続されている吸盤スタンド20を脱落前の状態にして取付け、上記のような振動試験を行う。
【0067】
Gメータ540において測定された加速度値に基づいて周波数毎の加速度値を抽出し、図6に示すようなパワースペクトルを得る。すると、吸盤スタンド20がしっかりと取付けられている場合は、スペクトルピーク周波数は約22Hzであり、吸盤スタンド20が脱落直前の状態ではスペクトルピーク周波数は18Hzであることが分かる。そこで、吸盤スタンド20の固定状態におけるスペクトルピーク周波数を、予め設定された基準値として基準値記憶部140に記憶する。或いは、基準値は、吸盤スタンド20の脱落直前の状態におけるスペクトルピーク周波数であってもよい。
【0068】
或いは、基準値記憶部140に設定される基準値は、特定の周波数、例えば、22Hzにおける加速度値であってもよい。この場合、制御部100が取付け状態判定処理を行う際に、22Hzにおける加速度値が0.87Gであればしっかり取付けられていると判断し、この加速度値からどの程度離れたか(吸盤スタンド20が脱落前の加速度値である0.27Gにどの程度近づいたか)に基いて吸盤スタンド20の取付け状態を判定する。
【0069】
なお、基準値として、特定の周波数、例えば、22Hzにおける加速度値を用いる場合、アイドリング状態であっても、自動車が坂道で停車している場合であれば、坂道の傾斜により、加速度値が増加、減衰することが考えられるため、アイドリング状態であっても、坂道であれば取付け状態処理を行なわないことが好ましい。坂道か否かは種々の方法で判定できるが、例えば、GPS測位位置や地図情報(図示しない地図記憶部に記憶)に基づいてマップマッチング処理を行なう際に、地図情報に坂道の情報(勾配など)が含まれる場合、マップマッチング処理した現在位置の勾配を参照することで判定できる。
【0070】
なお、上記実施例では、スタンドとして吸盤スタンド20を例示したが、両面テープを用いるスタンドなどであってもよい。
【0071】
さらに、上記実施例では、携帯型ナビゲーション装置10が吸盤スタンド20に揺動なく取付けられており、吸盤スタンド20の被設置面(ダッシュボード1)への取付け状態を判定する例を示したが、同様の方法で、携帯型ナビゲーション装置10の吸盤スタンド20への取付け状態を判定することも可能である。
【0072】
すなわち、基準値と抽出したスペクトルピーク周波数が所定値以上離れている場合とは、吸盤スタンド20が揺動なく被設置面(ダッシュボード1)に取付けられていない場合と、携帯型ナビゲーション装置10が揺動なく吸盤スタンド20に取付けられていない場合が考えられる。
【0073】
そのため、例えば、図4のS408の処理において、制御部100は、吸盤スタンド20が被設置面(ダッシュボード1)から落下する危険性があること、及び、携帯型ナビゲーション装置10が吸盤スタンド20から落下する危険性があることを示すメッセージを生成し、報知部130に出力し、報知部130のスピーカ131から音声として、或いは、表示部132から画像として出力してもよい。落下可能性を示すメッセージは、「ダッシュボードへのスタンドの取付け、又は、スタンドへのナビゲーションの取り付けが緩んでいる可能性があります。再度、付け直しをしてください。」といった警告ガイダンスを音声として放送したり、「スタンド取付け、ナビゲーション取付け確認!」のような警告画像を表示したりするものであればよい。
【0074】
また、吸盤スタンド20が被設置面(ダッシュボード1)に揺動なく取付けられている場合(固定されている場合)であれば、基準値と抽出したスペクトルピーク周波数が所定値以上離れている場合とは、携帯型ナビゲーション装置10が揺動なく吸盤スタンド20に取付けられていない場合であるため、例えば、図4のS408の処理において、制御部100は、携帯型ナビゲーション装置10が吸盤スタンド20から落下する危険性があることを示すメッセージを生成し、報知部130に出力し、報知部130のスピーカ131から音声として、或いは、表示部132から画像として出力してもよい。落下可能性を示すメッセージは、「スタンドへのナビゲーションの取り付けが緩んでいる可能性があります。再度、付け直しをしてください。」といった警告ガイダンスを音声として放送したり、「ナビゲーションの取付け確認!」のような警告画像を表示したりするものであればよい。
【0075】
なお、上記の携帯型ナビゲーション装置10が揺動なく吸盤スタンド20に取付けられているか否かの判定(取付け状態の判定)、並びに、携帯型ナビゲーション装置10が揺動なく吸盤スタンド20に取付けられているか否かの判定(取付け状態の判定)及び吸盤スタンド20が被設置面(ダッシュボード1)に揺動なく取付けられているか否かの判定(取付け状態の判定)は、上記実施例と記載した方法の何れを用いても構わない。
【0076】
また、取付け状態が揺動していると判定して(基準値と抽出したスペクトルピーク周波数が所定値以上離れている場合)落下可能性を示すメッセージを報知部130を介して出力した後に、取付け状態が揺動していないと判定した場合(基準値と抽出したスペクトルピーク周波数が所定値以上離れていない場合)、落下の危険性が解消されたことを示すメッセージを報知部130を介して出力してもよい。
【符号の説明】
【0077】
1 ダッシュボード
10 携帯型ナビゲーション装置
20 吸盤スタンド
100 制御部
101 CPU
102 ROM
103 RAM
110 GPS受信部
120 センサ部
121 加速度センサ
122 ジャイロセンサ
130 報知部
131 スピーカ
132 表示部
140 基準値記憶部
【特許請求の範囲】
【請求項1】
スタンドに取外し可能に取付けられる携帯型電子装置であって、前記携帯型電子装置は、
基準値を記憶する基準値記憶部と、
報知部と、
前記携帯型電子装置に加わる振動値を検出するセンサ部と、
前記振動値と前記基準値とに基づいて前記スタンドへの前記携帯型電子装置の取付け状態を判定し、前記取り付け状態に基づく報知メッセージを前記報知部を介して出力する制御部と、を備えることを特徴とする携帯型電子装置。
【請求項2】
スタンドによって被設置面に取外し可能に取付けられる携帯型電子装置であって、前記携帯型電子装置は、
基準値を記憶する基準値記憶部と、
報知部と、
前記携帯型電子装置に加わる振動値を検出するセンサ部と、
前記振動値と前記基準値とに基づいて前記被設置面へのスタンドの取付け状態を判定し、前記取り付け状態に基づく報知メッセージを前記報知部を介して出力する制御部と、を備えることを特徴とする携帯型電子装置。
【請求項3】
スタンドによって被設置面に取外し可能に取付けられる携帯型電子装置であって、前記携帯型電子装置は、
基準値を記憶する基準値記憶部と、
報知部と、
前記携帯型電子装置に加わる振動値を検出するセンサ部と、
前記振動値と前記基準値とに基づいて前記被設置面へのスタンドの取付け状態及び前記スタンドへの前記携帯型電子装置の取付け状態を判定し、前記取り付け状態に基づく報知メッセージを前記報知部を介して出力する制御部と、を備えることを特徴とする携帯型電子装置。
【請求項4】
前記制御部は、前記センサ部により検出された振動値を周波数分解し、前記周波数分解した振動値と前記基準値とに基づいて前記取付け状態を判定することを特徴とする請求項1〜3のいずれか1項に記載の携帯型電子装置。
【請求項5】
前記基準値は、基準周波数であり、
前記制御部は、前記周波数分解した振動値からスペクトルピーク周波数を算出し、前記基準周波数と前記スペクトルピーク周波数とを比較することにより、前記取り付け状態を判定することを特徴とする請求項4に記載の携帯型電子装置。
【請求項6】
前記基準周波数は、前記スペクトルピーク周波数の履歴値であることを特徴とする請求項5に記載の携帯型電子装置。
【請求項7】
前記基準値は、特定の周波数における振幅値の大きさであり、
前記制御部は、前記周波数分解した振動値のうちの前記特定の周波数における振幅値の大きさと前記基準値である特定の周波数における振幅値の大きさとを比較することにより、前記取り付け状態を判定することを特徴とする請求項4に記載の携帯型電子装置。
【請求項8】
前記制御部は、前記振動値と前記基準値とに基づいて前記スタンドが遥動なく前記被設置面に取付けられているか否かを判定し、前記スタンドが遥動なく前記被設置面に取付けられていないと判定した場合に、前記スタンドの脱落の危険性を示す報知メッセージを前記報知部を介して出力することを特徴とする請求項2〜7のいずれか1項に記載の携帯型電子装置。
【請求項9】
前記制御部は、前記スタンドが遥動していると判定し、前記報知部に前記報知メッセージを出力した後に、前記スタンドが遥動していないと判定した場合、前記スタンドの脱落の危険性が解消されたことを示すメッセージを前記報知部を介して出力することを特徴とする請求項8に記載の携帯型電子装置。
【請求項10】
前記スタンドが取り付けられる被設置面は自動車に設けられており、前記制御部は前記自動車がアイドリング状態か否かを判定し、前記自動車がアイドリング状態である場合に、前記センサ部により検出された振動値と前記基準値とに基づいて前記取付け状態を判定することを特徴とする請求項1〜9のいずれか1項に記載の携帯型電子装置。
【請求項1】
スタンドに取外し可能に取付けられる携帯型電子装置であって、前記携帯型電子装置は、
基準値を記憶する基準値記憶部と、
報知部と、
前記携帯型電子装置に加わる振動値を検出するセンサ部と、
前記振動値と前記基準値とに基づいて前記スタンドへの前記携帯型電子装置の取付け状態を判定し、前記取り付け状態に基づく報知メッセージを前記報知部を介して出力する制御部と、を備えることを特徴とする携帯型電子装置。
【請求項2】
スタンドによって被設置面に取外し可能に取付けられる携帯型電子装置であって、前記携帯型電子装置は、
基準値を記憶する基準値記憶部と、
報知部と、
前記携帯型電子装置に加わる振動値を検出するセンサ部と、
前記振動値と前記基準値とに基づいて前記被設置面へのスタンドの取付け状態を判定し、前記取り付け状態に基づく報知メッセージを前記報知部を介して出力する制御部と、を備えることを特徴とする携帯型電子装置。
【請求項3】
スタンドによって被設置面に取外し可能に取付けられる携帯型電子装置であって、前記携帯型電子装置は、
基準値を記憶する基準値記憶部と、
報知部と、
前記携帯型電子装置に加わる振動値を検出するセンサ部と、
前記振動値と前記基準値とに基づいて前記被設置面へのスタンドの取付け状態及び前記スタンドへの前記携帯型電子装置の取付け状態を判定し、前記取り付け状態に基づく報知メッセージを前記報知部を介して出力する制御部と、を備えることを特徴とする携帯型電子装置。
【請求項4】
前記制御部は、前記センサ部により検出された振動値を周波数分解し、前記周波数分解した振動値と前記基準値とに基づいて前記取付け状態を判定することを特徴とする請求項1〜3のいずれか1項に記載の携帯型電子装置。
【請求項5】
前記基準値は、基準周波数であり、
前記制御部は、前記周波数分解した振動値からスペクトルピーク周波数を算出し、前記基準周波数と前記スペクトルピーク周波数とを比較することにより、前記取り付け状態を判定することを特徴とする請求項4に記載の携帯型電子装置。
【請求項6】
前記基準周波数は、前記スペクトルピーク周波数の履歴値であることを特徴とする請求項5に記載の携帯型電子装置。
【請求項7】
前記基準値は、特定の周波数における振幅値の大きさであり、
前記制御部は、前記周波数分解した振動値のうちの前記特定の周波数における振幅値の大きさと前記基準値である特定の周波数における振幅値の大きさとを比較することにより、前記取り付け状態を判定することを特徴とする請求項4に記載の携帯型電子装置。
【請求項8】
前記制御部は、前記振動値と前記基準値とに基づいて前記スタンドが遥動なく前記被設置面に取付けられているか否かを判定し、前記スタンドが遥動なく前記被設置面に取付けられていないと判定した場合に、前記スタンドの脱落の危険性を示す報知メッセージを前記報知部を介して出力することを特徴とする請求項2〜7のいずれか1項に記載の携帯型電子装置。
【請求項9】
前記制御部は、前記スタンドが遥動していると判定し、前記報知部に前記報知メッセージを出力した後に、前記スタンドが遥動していないと判定した場合、前記スタンドの脱落の危険性が解消されたことを示すメッセージを前記報知部を介して出力することを特徴とする請求項8に記載の携帯型電子装置。
【請求項10】
前記スタンドが取り付けられる被設置面は自動車に設けられており、前記制御部は前記自動車がアイドリング状態か否かを判定し、前記自動車がアイドリング状態である場合に、前記センサ部により検出された振動値と前記基準値とに基づいて前記取付け状態を判定することを特徴とする請求項1〜9のいずれか1項に記載の携帯型電子装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−111425(P2012−111425A)
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願番号】特願2010−263903(P2010−263903)
【出願日】平成22年11月26日(2010.11.26)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(000214892)三洋電機コンシューマエレクトロニクス株式会社 (1,582)
【Fターム(参考)】
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願日】平成22年11月26日(2010.11.26)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(000214892)三洋電機コンシューマエレクトロニクス株式会社 (1,582)
【Fターム(参考)】
[ Back to top ]