
携帯機器と自律航法演算法
【課題】携帯機器1が備える自律航法演算法として、処理するデータ量及び処理ステップを少なくすることで、記憶容量に対する負荷が小さく処理時間が短いことを実現することが目的である。
【解決手段】地磁気センサと加速度センサを備える従来の携帯機器に、簡便な演算法を備える移動方向演算部33を追加することで、大きい記憶容量や長い処理時間を要しないで移動方向を計測できる携帯機器1と自律航法演算法を提供する。
【解決手段】地磁気センサと加速度センサを備える従来の携帯機器に、簡便な演算法を備える移動方向演算部33を追加することで、大きい記憶容量や長い処理時間を要しないで移動方向を計測できる携帯機器1と自律航法演算法を提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地磁気センサと加速度センサを備えた携帯機器において、GPS(Global Positioning System)の利用が難しい建造物の内部やその周辺で移動者の移動方向及び移動経路を計測する自律航法機能を備えた携帯機器とその方法に関する。
【背景技術】
【0002】
近年、GPSによるナビゲーションと、地磁気センサ及び加速度センサを用いて移動者の移動方向及び移動経路を計測する自律航法と、を組み合わせた機能を備える携帯機器が開発されている。
【0003】
地磁気センサ及び加速度センサを用いた自律航法については、例えば、特許文献1に開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第4515497号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1においては、加速度センサが検出した加速度データ群等から重力加速度を算出し、その重力加速度に直交する平面上に投影された加速度データ群等の周波数成分に基づいて、歩行者の端末座標系(端末に固定された座標系)から見た歩行者の移動方向を推定している。次に、この移動方向と地磁気センサが検出した地磁気データとによって、地上座標系に対する歩行者の歩行方向を推定している。
【0006】
上述のように、従来技術である特許文献1は、地上座標系に対する歩行者の歩行方向を算出するために、処理するデータ量が多く、また、複雑で処理ステップが多い処理法を採用している。そのため、携帯機器の記憶容量に対する負荷が大きく、処理時間も長いと言う課題があった。
【0007】
ところが、携帯電話に代表される携帯機器は、記憶容量は小さく、消費電力も制限されるため、大きい記憶容量や長い時間を要する複雑な処理は極力避けることが要望されている。
【0008】
本発明は、このような状況に鑑みてなされたものであり、GPSの利用が難しい建造物の内部やその周辺で、大きい記憶容量や長い処理時間を要しないで移動体の移動方向を計測できる携帯機器を提供することである。
【課題を解決するための手段】
【0009】
地磁気を検出するX軸用、Y軸用及びZ軸用からなる3軸の地磁気センサと加速度を検出するX軸用、Y軸用及びZ軸用からなる3軸の加速度センサとを備え、前記3軸の加速度センサが検出した加速度データから携帯機器の姿勢角度、携帯機器の姿勢及び第一の計算値群を算出する加速度演算部と、前記3軸の地磁気センサが検出した地磁気データから携帯機器の方向を算出する方位演算部と、前記第一の計算値群を複数の閾値と比較することで前記携帯機器の方向から移動体の移動方向を算出する移動方向演算部とを備えることを特徴とする。
【0010】
このような態様であれば、前記地磁気センサと前記加速度センサを備える前記携帯機器に、簡便な演算法を備える前記移動方向演算部を追加することで前記移動方向を算出することが可能となる。
【0011】
よって、本発明によれば、GPSの利用が難しい建造物の内部やその周辺で、大きい記憶容量や長い処理時間を要しないで前記移動体の前記移動方向を計測できる前記携帯機器を提供することができる。
【0012】
前記第一の計算値群が、前記X軸用、Y軸用及びZ軸用からなる3軸の内の1軸の加速度であることが好ましい。
【0013】
このような態様であれば、前記3軸の内の1軸の加速度の絶対値及び前記3軸の内の1軸の加速度を閾値と比較することで、前記携帯機器の方向から前記移動方向を簡便に算出することが可能となる。
【0014】
前記加速度演算部が前記加速度データから第二の計算値群を算出し、前記移動方向演算部が前記第一の計算値群から歩数を算出し、前記第二の計算値群から歩行の有無を判定し、前記移動方向に歩幅×前記歩数の距離を起点から累積的に繋いで位置を求めることで、移動経路を算出する移動経路演算部を備えたことを特徴とする。
【0015】
このような態様であれば、前記移動方向を算出できる前記携帯機器に簡便な演算法を備える前記移動経路演算部を追加することで前記移動経路を算出することが可能となる。
【0016】
よって、GPSの利用が難しい建造物の内部やその周辺で、大きい記憶容量や長い処理時間を要しないで前記移動経路を計測できる前記携帯機器を提供することができる。
【0017】
前記第一の計算値群が前記X軸用、Y軸用及びZ軸用からなる3軸の内の1軸の加速度であること及び前記第二の計算値群が前記X軸用、Y軸用及びZ軸用からなる3軸加速度の長さ、3軸加速度の長さの平均値及び3軸加速度の分散値であることが好ましい。
【0018】
このような態様であれば、前記移動経路を簡便に算出することが可能である。
【0019】
地磁気を検出するX軸用、Y軸用及びZ軸用からなる3軸の地磁気センサと、加速度を検出するX軸用、Y軸用及びZ軸用からなる3軸の加速度センサと、前記3軸の加速度センサが検出した加速度データを演算処理する加速度演算部と、前記3軸の地磁気センサが検出した地磁気データを演算処理する方位演算部と、移動体の移動方向を算出する移動方向演算部とを備える携帯機器において、加速度演算部が第一の計算値群を算出し、前記第一の計算値群を複数の閾値と比較することで、携帯機器の方向から移動体の移動方向を算出することを特徴とする。
【0020】
このような態様であれば、前記第一の計算値群を前記複数の閾値と比較し簡単な関係式によって前記携帯機器の方向から前記移動方向を算出できるので、大きい記憶容量や長い処理時間を要しないで前記移動方向を算出する、即ち、簡便な演算法を備える移動方向演算部を可能とする。
【0021】
前記第一の計算値群を複数の閾値と比較することで歩数を算出し、前記加速度演算部が第二の計算値群を算出し前記第二の計算値群を複数の閾値と比較することで歩行の有無を判定し、前記移動方向に歩幅×前記歩数の距離を起点から累積的に繋いで位置を求めることで、移動経路を算出することが好ましい。
【0022】
このような態様であれば、前記第一の計算値群を前記複数の閾値と比較する簡便な方法で歩数を算出し、前記第二の計算値群を複数の閾値と比較する簡便な方法で歩行の有無を判定し、大きい記憶容量や長い処理時間を要しないで前記移動経路を算出する、即ち、簡便な演算法を備える前記移動経路演算部を可能とする。
【0023】
前記第一の計算値群が前記X軸用、Y軸用及びZ軸用からなる3軸の内の1軸の加速度であることが好ましい。
【0024】
このような態様であれば、前記3軸の内の1軸の加速度を用いて、簡便に移動方向及び移動経路を算出できる。
【0025】
前記第一の計算値群が前記X軸用、Y軸用及びZ軸用からなる3軸の内の1軸の加速度であること及び前記第二の計算値群が3軸加速度の長さ、前記3軸加速度の長さの平均値及び3軸加速度の分散値であることが好ましい。
【0026】
このような態様であれば、前記3軸の内の1軸の加速度、前記3軸加速度の長さ、前記3軸加速度の長さの平均値及び前記3軸加速度の分散値を用いて、簡便に移動経路を算出できる。
【0027】
前記携帯機器の方向から前記移動方向を算出するに当って、携帯機器の姿勢が縦向きと判定された後に3軸の内の1軸の加速度の絶対値が第二閾値以下なら、前記移動方向は前記携帯機器の方向と同じであると判定し、前記携帯機器の姿勢が縦向きと判定された後に前記3軸の内の1軸の加速度の絶対値が前記第二閾値以上なら、前記移動方向は前記携帯機器の方向と異なると判定し、前記3軸の内の1軸の加速度が第三閾値以上なら、前記移動方向は前記携帯機器の方向に90を減算した値と、前記3軸の内の1軸の加速度が前記第三閾値以下なら、前記移動方向は前記携帯機器の方向に90を加算した値と算出することが好ましい。
【0028】
このような態様であれば、閾値との比較により区分け、それぞれの簡単な関係式によって前記携帯機器の方向から前記移動方向を簡便に算出できるので、大きい記憶容量や長い処理時間を要しないで、即ち、簡便な演算法で前記移動方向を算出することが可能となる。
【0029】
前記3軸加速度の分散値が第四閾値より大きくかつ第五閾値より小さく、及び前記3軸加速度の長さから前記3軸加速度の長さの平均値を差し引いた値が第六閾値より大きければ歩行していると判定し、前記移動方向に歩幅×前記歩数の距離を起点から累積的に繋いで位置を求めることで、前記移動経路を算出することが好ましい。
【0030】
このような態様であれば、閾値との比較による簡便な手法で移動経路が算出できるので、大きい記憶容量や長い処理時間を要しないで、即ち、簡便な演算法で前記移動経路を算出することが可能となる。
【発明の効果】
【0031】
本発明によれば、地磁気センサと加速度センサを備える従来の携帯機器に、簡便な演算法を備える移動方向演算部を追加することで移動体の移動方向を算出することが可能となる。
【0032】
よって、本発明によれば、GPSの利用が難しい建造物の内部やその周辺で、大きい記憶容量や長い処理時間を要しないで移動体の移動方向を計測できる携帯機器を提供することが可能である。
【図面の簡単な説明】
【0033】
【図1】本発明の一実施形態における自律航法機能の概略構成を示すブロック図である。
【図2】本発明の一実施形態における携帯機器に搭載された加速度センサと地磁気センサとの模式図である。
【図3】携帯機器の姿勢角度を説明する図である。
【図4】携帯機器の姿勢を説明する図である。
【図5】携帯機器の方向を説明する図である。
【図6】携帯機器が体の右側面で振られている際の、移動方向と携帯機器の方向との関係を説明する図である。
【図7】携帯機器が体の左側面で振られている際の、移動方向と携帯機器の方向との関係を説明する図である。
【図8】携帯機器が体の側面で振られている際の、移動方向と携帯機器の方向との関係を説明する図である。
【図9】起点(始動点)から現時点までの移動経路を算出する方法を説明する図である。
【発明を実施するための形態】
【0034】
本発明の一実施形態は、電波が微弱なためにGPSによる位置計測の精度が劣る建造物等の内部やその周辺で、移動者が携帯機器1の自律航法機能を始動した起点から移動を開始し、各地点での移動方向や前記起点からの移動経路を計測することに適用される。
【0035】
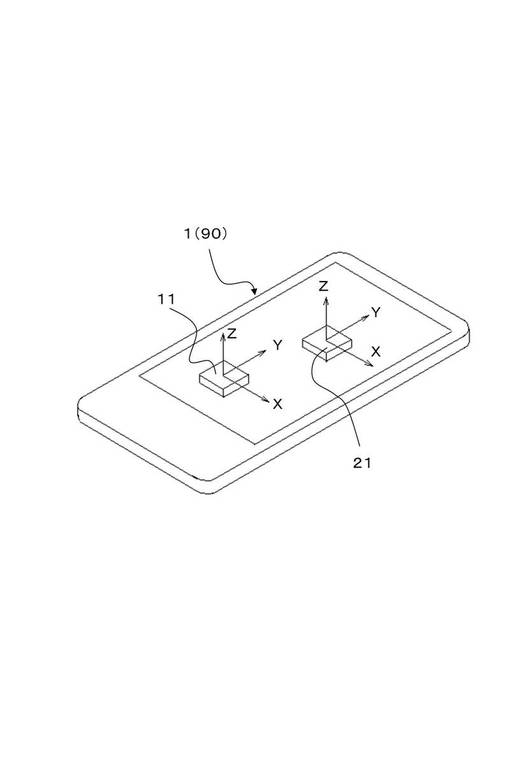
本発明の一実施形態では、携帯機器1は携帯電話90であり、移動体は歩行者であり、移動方法は歩行である。
【0036】
ただし、本発明は、歩行者や歩行による移動のみに限定されるものではなく、歩行者以外の移動体や歩行以外の移動方法に適用することも可能である。
【0037】
以下に、本発明の一実施形態について説明する。携帯機器1は、始動時には歩行者の前面に保持され、移動時には歩行者の前面に保持されているか、または歩行者の左右の側面で振られていることを想定している。
【0038】
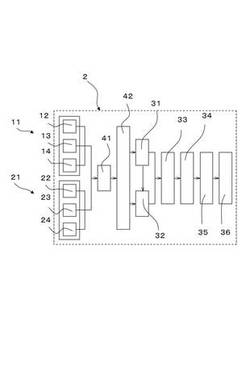
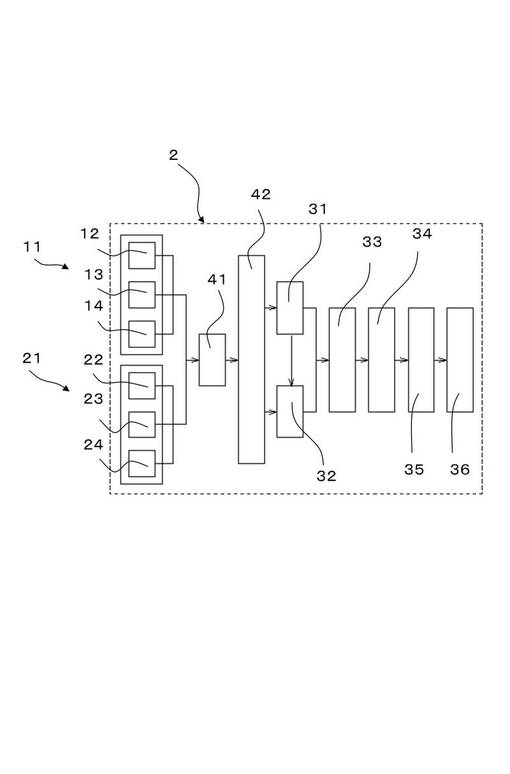
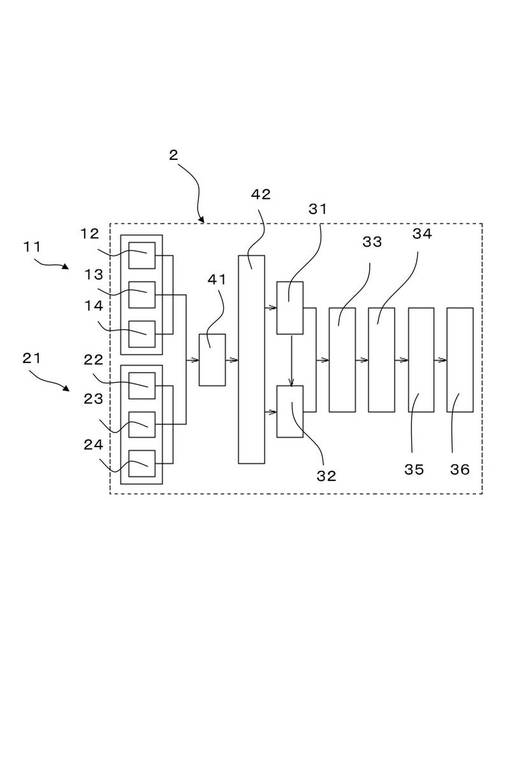
図1は、本発明の一実施形態における自律航法機能の概略構成を示すブロック図2である。なお、図1では詳細な説明に必要な構成を示すが、携帯機器1として必須の構成であっても本明細書において説明しないものについては省略している。
【0039】
図2に、本発明の一実施形態における携帯機器1に搭載された加速度センサ11と地磁気センサ21との模式図を示す。加速度センサ11は、加速度センサのX軸センサ12、加速度センサのY軸センサ13、加速度センサのZ軸センサ14を備え、地磁気センサ21は、地磁気センサのX軸センサ22、地磁気センサのY軸センサ23、地磁気センサのZ軸センサ24を備えている。また、加速度センサ11と地磁気センサ21の各軸の方向は同じである。
【0040】
携帯機器1は、図1に示すように、加速度センサ11、地磁気センサ21、信号処理部41、記憶部42、加速度演算部31、方位演算部32、移動方向演算部33、移動経路演算部34、表示演算部35、表示部36によって構成されることで自律航法機能を備えている。
【0041】
信号処理部41は、加速度センサ11及び地磁気センサ21からの各軸のセンサ出力をA/D変換しデジタル値で記憶部42に記録する。また、記憶部42には、演算に必要な第一閾値、第二閾値、第三閾値、第四閾値、第五閾値及び第六閾値が予め記憶されている。
【0042】
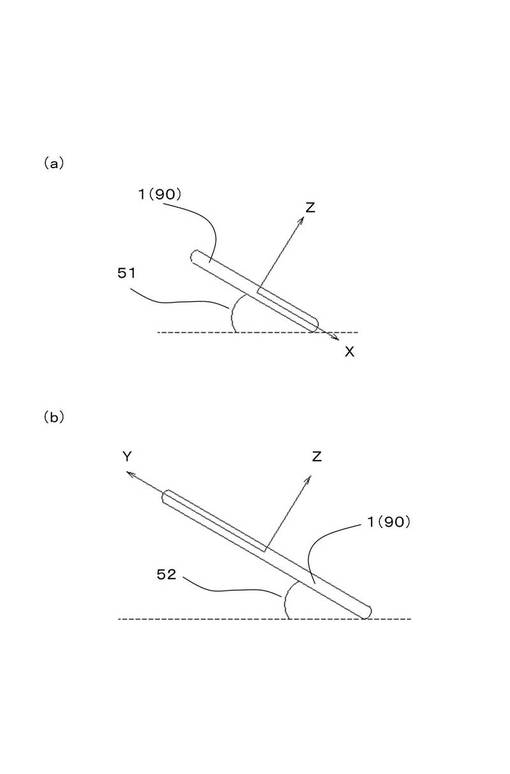
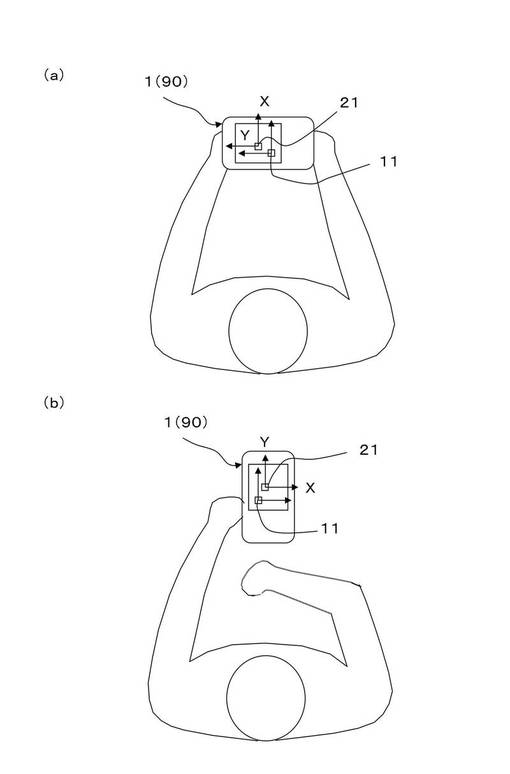
以下に、加速度演算部31とその加速度演算法について説明する。歩行者の歩行方向と携帯機器1の相対的な関係を以下の方法により縦方向と横方向に分別する。携帯機器1の姿勢角度の内の一つは、一般的にロール角51と言われ、図3(a)に示すように加速センサのX軸センサ12が感知するX軸方向と水平面とがなす角度である。加速度演算部31は、記憶部42から加速度センサ11からの出力である加速度出力データ及び第一閾値を読み出し、この加速度出力データから携帯機器1のロール角51を算出する。この携帯機器1のロール角51を第一閾値と比較する。そして、携帯機器1のロール角51が第一閾値より小さい際は携帯機器1の姿勢を縦向きと判定し、大きい際は横向きと判定する。横向きは図4(a)に示すように地磁気センサのX軸センサ22の感知するX軸方向が歩行者の移動方向と同じ場合である。この場合、歩行者が画面を見るために携帯機器1は傾けられ携帯機器1のロール角51は大きい。縦向きは図4(b)に示すように地磁気センサのY軸センサ23が感知するY軸方向が歩行者の移動方向と同じ場合である。この場合も、歩行者が画面を見るために携帯機器1は傾けられ、図3(b)に示すように加速センサのY軸センサ13が感知するY軸方向と水平面とがなす角度52は大きいが、携帯機器1のロール角51は小さい。これは、歩行者が携帯機器1を縦向きに持つ際はロール角51がほとんど発生せず、横向きに持つ際に発生すると言う現象である。
【0043】
携帯機器の姿勢が横向きか縦向きかの判定結果は、図1に示すように、加速度演算部31から方位演算部32及び移動方向演算部33に出力される。図4に横向きと縦向きで歩行者に保持された様子を示した。横向きの際は、歩行者は両手でしっかりと携帯機器1を持っているので、歩行者はこの姿勢を保持して歩行し、体の側面で携帯機器1を振ることはないと推定した。よって、図4(a)に示すように、記憶部42から移動方向に向いていると推定される地磁気センサのX軸センサ22の出力データを読み出し、これより携帯機器の方向62を算出している。この際は、歩行者の移動方向と携帯機器の方向62とは一致している。縦向きで歩行者の前面に保持されている際は、図4(b)に示すように、記憶部42から移動方向に向いていると推定される地磁気センサのY軸センサ23の出力データを読み出し、これより携帯機器の方向62を算出している。この際は、歩行者の移動方向と携帯機器の方向62とは一致している。縦向きで歩行者の左右の側面で振られている際は、地磁気センサのZ軸センサ24が感知するZ軸方向の出力データから携帯機器の方向62を算出している。この際は、図8に示すように、歩行者の移動方向と携帯機器の方向62とは一致しておらず、地磁気センサのZ軸センサ24が感知するZ軸方向は歩行者に向いている。
【0044】
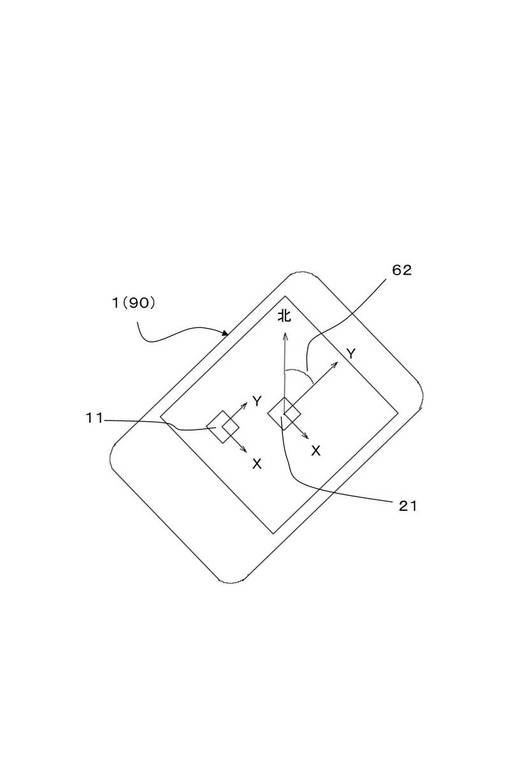
そして、縦向きで歩行者の前面に保持されている際は、図5に示すように、地磁気センサのY軸センサ23が感知するY軸方向と地磁気との成す角度(θ)を携帯機器の方向62とし、地磁気の方向を基準とし反時計回りを正と定義している。地磁気センサのX軸センサ22、地磁気センサのZ軸センサ24によって携帯機器の方向62が計測される場合も同じである。このように方位演算部32は携帯機器の方向62を算出する。
【0045】
地磁気センサのX軸センサ22が感知するX軸方向及び地磁気センサのY軸センサ23が感知するY軸方向が歩行者の移動する方向に向いている際は、携帯機器の方向62は移動方向と一致するので問題ない。
【0046】
ところが、携帯機器1を持つ手が体の側面で振られている際には、携帯機器の方向62と歩行者の移動方向は一致しておらず、携帯機器の方向62を補正して移動方向を算出することが必要である。
【0047】
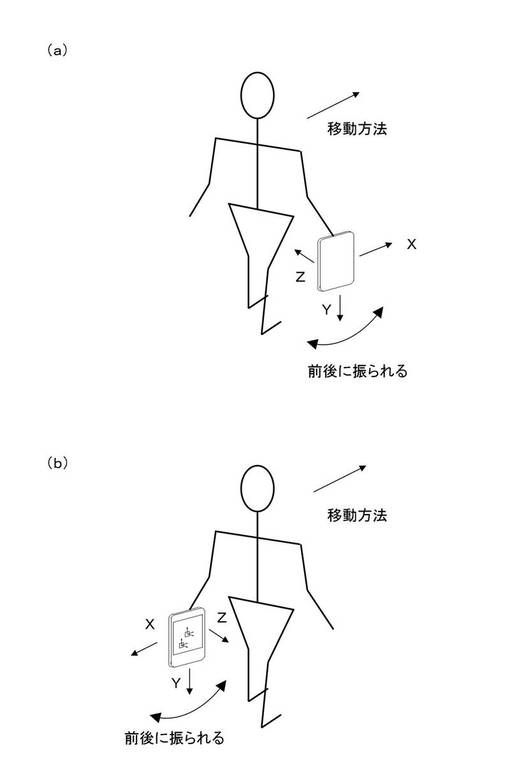
本発明の一実施形態では、携帯機器1は、始動時には歩行者の前面に横向き又は縦向きで保持され、歩行時には歩行者の前面に横向き又は縦向きに保持されているか、または、図8に示すように歩行者の左右の側面で前後に振られ、加速度センサのY軸センサ13が感知するY軸方向が回転中心(歩行者の肩)から外側に向き、加速度センサのZ軸センサ14が感知するZ軸方向が歩行者に向いた状態を想定している。
【0048】
加速度演算部31は、記憶部42から加速度センサのX軸センサ12の出力データを読み出し移動方向演算部33に出力する。ここでは、第一の計算群である3軸内の1軸の加速度は、加速度センサのX軸センサ12の出力データである。
【0049】
加速度演算部31は、加速度センサ11の3軸の出力データの分散値を算出する。この分散値を3軸加速度の分散値σと名付けるが、この分散値は移動経路演算部34に出力される。3軸加速度の分散値σは、加速度センサ11のX軸センサ、Y軸センサ、Z軸センサの3軸の出力から合成されるベクトルの分散値である。即ち、X軸センサ、Y軸センサ及びZ軸センサの出力値からそれぞれの平均値を差し引いた値を二乗し加算した平方根の総和を、計算に使ったデータ数である母数で割った値であり、(1)式で表される。ここでは、3軸加速度の分散値σは第二の計算群である。
【0050】
【数1】

【0051】
加速度演算部31は、加速度センサ11の3軸の出力データから、その長さを算出し、その長さの平均値も計算する。3軸加速度の長さrと3軸加速度の長さの平均値r(av)は移動経路演算部34に出力される。3軸加速度の長さrは、加速度センサ11のX軸センサ、Y軸センサ、Z軸センサの3軸の出力から合成されるベクトルの長さである。即ち、3軸の出力値を二乗し、それを和して平方根した値であり、(2)式で表される。3軸加速度の長さの平均値r(av)は、(3)式で表される。ここでは、3軸加速度の長さr、3軸加速度の長さの平均値r(av)は第二の計算群である。
【0052】
【数2】
【0053】
以下に、移動方向演算部33が備える移動方向を補正する自律航法演算法について説明する。
【0054】
携帯機器1が横向きと判定された際は、上述したように歩行者は横向きに保持して歩行すると推定される。図4(a)に示すように、加速度センサのX軸センサ12の感知するX軸方向と歩行者の移動方向とは同じなので、歩行者の移動方向と携帯機器の方向62とは一致しており、
移動方向(θ‘)=携帯機器の方向62(θ)
とする。また、この結果は、移動経路演算部34に出力される。
【0055】
加速度センサのX軸センサ12の出力値の絶対値は、携帯機器1が体の側面で振られている場合に比べて体の前面にほぼ固定され保持されている場合の方が小さいことが確認されている。よって、加速度センサのX軸センサ12の出力値の絶対値が記憶部42から読み出した第二閾値より小さい際は、歩行者は携帯機器1を体の前面で手に保持して歩行していると推定される。
【0056】
携帯機器1が縦向きと判定された後に、移動方向演算部33は、加速度センサのX軸センサ12の出力値の絶対値と第二閾値とを比較する。そして、前者が後者より小さい際には、歩行者の前面に携帯機器1は縦向きに保持されていると推定する。そして、歩行者の移動方向は携帯機器の方向62に一致していると判定し、
移動方向(θ‘)=携帯機器の方向62(θ)
とする。また、この結果は、移動経路演算部34に出力される。
【0057】
歩行者の前面に携帯機器1が保持され歩行者が歩行する際には、加速度センサ11の出力は、歩行動作で生じる上下動作に伴い経時的な周期的波形となる。移動経路演算部34は、前記移動方向(θ‘)に歩幅×歩数の距離を起点から累積的に繋いで移動経路を算出する。この演算は、加速度センサ11の出力の一周期を単位になされるが、この一周期は、ここでは、上下動作である1歩に相当する。この結果は、移動経路演算部34に出力される。
【0058】
縦向きと判定された後に、加速度センサのX軸センサ12の出力値の絶対値が第二閾値より大きい際は、携帯機器1は体の側面で振られていると推定される。
【0059】
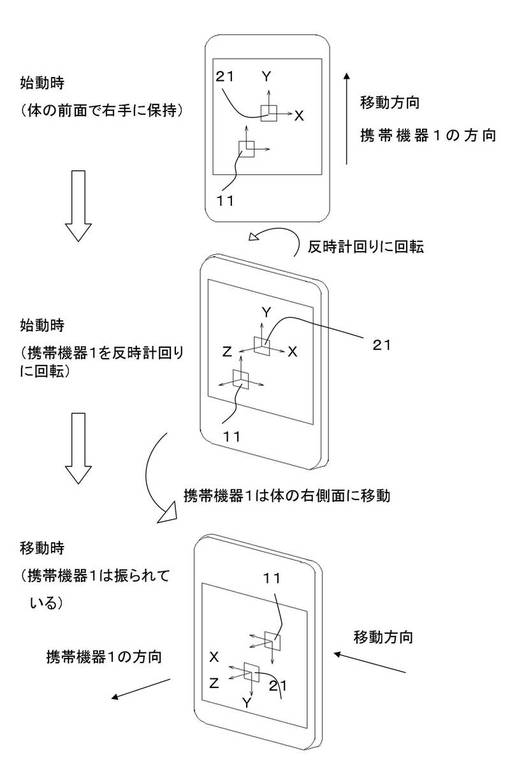
携帯機器1が体の側面で振られていると推定された際は、移動方向演算部33は、加速度センサのX軸センサ12の出力値と記憶部42から読み出した第三閾値とを比較する。前者が後者より大きい際には、加速度センサのX軸センサ12が感知するX軸方向が移動方向を向いていると判定する。この状態を図8(a)に示した。この際の携帯機器1の状態変化を図6によって説明する。始動時は、体の前面で右手に携帯機器1が持たれ、次に体の前面で携帯機器1が反時計回りに90度回転され、そして携帯機器1は体の右側面に移動させられ、X軸方向は移動方向に向きZ軸方向は体の方に向いて振られる。よって、Z軸方向はX軸方向に対して+90度回転しているので、携帯機器の方向62(θ)(Z軸方向)は、移動方向(θ‘)(X軸方向)より+90度大きいので、
移動方向(θ‘)=携帯機器の方向62(θ)−90
と補正される。その結果は、移動経路演算部34に出力される。
【0060】
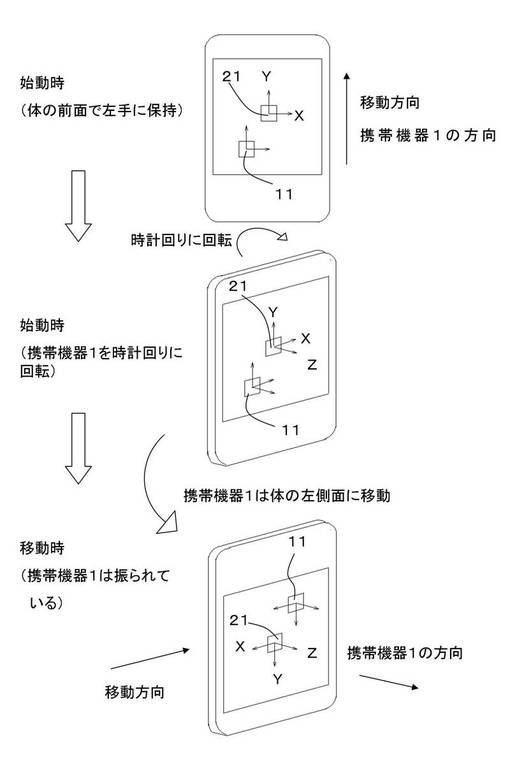
また、移動方向演算部33は、加速度センサのX軸センサ12の出力値と第三閾値を比較し、前者が後者より小さい際には、加速度センサのX軸センサ12が感知するX軸方向が移動方向の逆を向いていると判定する。この状態を図8(b)に示した。この際の携帯機器1の状態変化を図7によって説明する。始動時は、体の前面で左手に携帯機器1が持たれ、次に体の前面で携帯機器1が時計回りに90度回転され、そして携帯機器1は体の左側面に移動させられ、X軸方向は移動方向の逆に向きZ軸方向は体の方に向いて振られる。よって、Z軸方向は移動方向対して−90度回転しているので、携帯機器の方向62(θ)(Z軸方向)は、移動方向(θ‘)より+90度小さいので、
移動方向(θ‘)=携帯機器の方向62(θ)+90
と補正される。その結果は、移動経路演算部34に出力される。
【0061】
携帯機器1が体の側面で振られていると推定された際には、加速度センサ11の出力は、携帯機器1が体の側面で前後に振られる動作に伴い経時的な周期的波形となる。この前後に携帯機器1が振られる一周期の間に、歩行者は2歩進む。この結果は、移動経路演算部34に出力される。
【0062】
上述のように、閾値との比較により区分け、それぞれの簡単な関係式によって携帯機器1の方向から移動方向を簡便に算出している。よって、大きい記憶容量や長い処理時間を要しないで移動方向を算出することが可能となる。
【0063】
以下に、移動経路演算部34が備える移動経路を算出する自律航法演算法について説明する。
【0064】
歩行者の前面に携帯機器1が横向き及び縦向きに保持されていると判定された際、移動経路演算部34は、加速度演算部31から出力された3軸加速度の分散値σと第四閾値及び第五閾値とを比較する。3軸加速度の分散値σが、第四閾値より小さければ歩行者は歩行してないと推定され、この際は移動方向と携帯機器の方向62は一致するので、
移動方向(θ‘)=携帯機器の方向62(θ)
に歩幅×0歩の距離を現時点までの移動経路に繋いで、移動経路を算出する。ただし、この際は、歩幅×0歩のため移動距離はゼロなので、移動経路は生じない。
また、3軸加速度の分散値σが、第五閾値より大きければ異常時であり、移動経路は算出しない。
【0065】
3軸加速度の分散値σが、第四閾値より小さい際は、携帯機器1がほぼ静止した状態であり、歩行者は歩いていないと判定され、3軸加速度の分散値σが第五閾値より大きい際は、携帯機器1が激しく動かされている等の異常な場合と想定されるので、移動経路は算出しない。
【0066】
3軸加速度の長さrは3軸加速度の長さの平均値r(av)に対して、歩行時には大きく、歩行していない際はほぼ同じである。
【0067】
そして、歩行者の前面に携帯機器1が横向き及び縦向きに保持されていると判定された際、3軸加速度の分散値σが、第四閾値より大きく第五閾値より小さい際には、移動経路演算部34は、3軸加速度の長さから3軸加速度の長さの平均値を差し引いた値と第六閾値を比較する。
【0068】
3軸加速度の長さから3軸加速度の長さの平均値を差し引いた値が第六閾値前者より小さい際は、歩行者は歩行してないと推定され、この際は移動方向と携帯機器の方向62は一致するので、
移動方向(θ‘)=携帯機器の方向62(θ)
に歩幅×0歩の距離を現時点までの移動経路に繋いで、移動経路64を算出する。ただし、この際は、歩幅×0歩のため移動距離はゼロなので、移動経路は生じない。
【0069】
3軸加速度の長さから3軸加速度の長さの平均値を差し引いた値が第六閾値前者より大きい際は、歩行者は歩行していると推定され、移動方向と携帯機器の方向62は一致するので、
移動方向(θ‘)=携帯機器の方向62(θ)
に歩幅×1歩の距離を現時点までの移動経路に繋いで、移動経路を算出する。
【0070】
移動経路の算出について図9にて説明する。起点(始動点)から現時点までに、移動方向がθ1からθnまで変化したとする。この間の、移動方向θiの区間で、加速度センサの波形の周期がni回であったとすると、移動方向θiの区間での移動距離は歩幅×歩数×niとなる。歩行者の前面に携帯機器1が保持され歩行者が歩行する際は歩数は1であり、歩行者の側面で携帯機器1が振られ歩行者が歩行する際は歩数は2である。移動方向θ1からθnまで、移動方向θiに歩幅×歩数×niの移動距離を繋ぐことで、起点(始動点)から現時点までの移動経路が算出される。この算出方法は一例であって、移動経路を正しく算出できる他の算出方法を用いても構わない。
【0071】
携帯機器1が体の側面で振られている際、移動経路演算部34は、3軸加速度の分散値σと第四閾値及び第五閾値とを比較する。3軸加速度の分散値σが、第四閾値より小さくければ、歩行者は歩行してないと推定され、
移動方向(θ‘)=携帯機器の方向62(θ)+90
または
移動方向(θ‘)=携帯機器の方向62(θ)−90
に歩幅×0歩の距離を現時点までの移動経路に繋いで、移動経路を算出する。ただし、この際は、歩幅×0歩のため移動距離はゼロなので、移動経路は生じない。また、3軸加速度の分散値σが、第五閾値より大きければ異常時であり、移動経路は算出しない。
【0072】
携帯機器1が体の側面で振られている際、3軸加速度の分散値σが、第四閾値より大きくかつ第五閾値より小さい際には、移動経路演算部34は、3軸加速度の長さrから3軸加速度の長さの平均値r(av)を差し引いた値と第六閾値を比較する。
【0073】
3軸加速度の長さrから3軸加速度の長さの平均値r(av)を差し引いた値が第六閾値より小さい際は、歩行者は歩行してないと推定され、
移動方向(θ‘)=携帯機器の方向62(θ)+90
または
移動方向(θ‘)=携帯機器の方向62(θ)−90
に歩幅×0歩の距離を現時点までの移動経路に繋いで、移動経路を算出する。ただし、この際は、歩幅×0歩のため移動距離はゼロなので、移動経路は生じない。
【0074】
携帯機器1が体の側面で振られている際、3軸加速度の長さrから3軸加速度の長さの平均値r(av)を差し引いた値が第六閾値より大きい際は、歩行者は歩行していると推定され
移動方向(θ‘)=携帯機器の方向62(θ)+90
または
移動方向(θ‘)=携帯機器の方向62(θ)−90
に歩幅×2歩の距離を現時点までの移動経路に繋いで、移動経路を算出する。
【0075】
移動経路演算部34は、時々刻々に算出された移動方向に歩幅×歩数を時間経過に伴い繋いで、歩行者の移動経路を算出する。そして、表示演算部35によって表示部36に表示される。
【0076】
上述のように、閾値との比較による簡便な手法で移動方向及び移動経路を算出している。よって、大きい記憶容量や長い処理時間を要しないで移動方向及び移動経路を算出することが可能となる。
【0077】
ところが、特許文献1に記載された従来技術においては、以下に記述するように複雑な方法によって、移動方向を算出している。このことが、本発明が解決しようとした課題である。
【0078】
ほぼ固定されて保持された際は、加速度データ群から重力加速度を算出し、この重力加速度に直交する平面上に投影された加速度データ群の一歩の期間に相当する周波数成分に基づいて、進行方向計測装置に付随する端末座標系から見た歩行者の移動方向を推定する。次に、地磁気データ群と端末座標系の前記移動方向に基づいて、地上座標系での移動方向63を算出している。
【0079】
また、歩行者の体の横で振られている際は、加速度データのノルムから計算した加速度ノルムデータ群及び加速度データ群の一歩の期間に相当する周波数成分に基づいて、振りの最下点での端末座標系から見た重力加速度を算出し、重力加速度に直交する平面上に投影された加速度データ群の二歩の期間の周波数成分に基づいて、振りの最下点での端末座標系から見た歩行者の移動方向を推定する。次に、振りの最下点での地磁気データと端末座標系の前記移動方向に基づいて、地上座標系での移動方向を算出している。
【0080】
このように、特許文献1に記載された従来技術においては、膨大なデータ量を使って演算を行うために大きなメモリ容量が必要であり、膨大なデータ量を処理するために演算に時間を要し応答速度が遅くなる問題があった。
【0081】
本発明の一実施形態においては、携帯機器1が歩行者の前面に保持されているか、体の左右で振られていると言う状況を設定し、上述のように、閾値との比較を主とする簡便な演算で移動方向及び移動経路を算出している。このようにして、大きい記憶容量や長い時間を要する複雑な処理を避けることが好ましいと言う携帯電話に代表される携帯機器1の要望に応えている。
【0082】
本発明の一実施形態では携帯機器1として携帯電話90としたが、本発明は携帯電話90に限られるのではなく、加速度センサ11及び地磁気センサ21を備える携帯用情報端末、ゲーム携帯、腕時計等の電子機器であっても構わない。
【0083】
本発明は、地図がある場合に限定されるものではない。地図がなくても構わない。
【符号の説明】
【0084】
1 携帯機器
2 ブロック図
11 加速度センサ
12 加速度センサのX軸センサ
13 加速度センサのY軸センサ
14 加速度センサのZ軸センサ
21 地磁気センサ
22 地磁気センサのX軸センサ
23 地磁気センサのY軸センサ
24 地磁気センサのZ軸センサ
31 加速度演算部
32 方位演算部
33 移動方向演算部
34 移動経路演算部
35 表示演算部
36 表示部
41 信号処理部
42 記憶部
51 ロール角
52 加速センサのY軸センサ13が感知するY軸方向と水平面とがなす角度
62 携帯機器の方向
90 携帯電話
【技術分野】
【0001】
本発明は、地磁気センサと加速度センサを備えた携帯機器において、GPS(Global Positioning System)の利用が難しい建造物の内部やその周辺で移動者の移動方向及び移動経路を計測する自律航法機能を備えた携帯機器とその方法に関する。
【背景技術】
【0002】
近年、GPSによるナビゲーションと、地磁気センサ及び加速度センサを用いて移動者の移動方向及び移動経路を計測する自律航法と、を組み合わせた機能を備える携帯機器が開発されている。
【0003】
地磁気センサ及び加速度センサを用いた自律航法については、例えば、特許文献1に開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第4515497号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1においては、加速度センサが検出した加速度データ群等から重力加速度を算出し、その重力加速度に直交する平面上に投影された加速度データ群等の周波数成分に基づいて、歩行者の端末座標系(端末に固定された座標系)から見た歩行者の移動方向を推定している。次に、この移動方向と地磁気センサが検出した地磁気データとによって、地上座標系に対する歩行者の歩行方向を推定している。
【0006】
上述のように、従来技術である特許文献1は、地上座標系に対する歩行者の歩行方向を算出するために、処理するデータ量が多く、また、複雑で処理ステップが多い処理法を採用している。そのため、携帯機器の記憶容量に対する負荷が大きく、処理時間も長いと言う課題があった。
【0007】
ところが、携帯電話に代表される携帯機器は、記憶容量は小さく、消費電力も制限されるため、大きい記憶容量や長い時間を要する複雑な処理は極力避けることが要望されている。
【0008】
本発明は、このような状況に鑑みてなされたものであり、GPSの利用が難しい建造物の内部やその周辺で、大きい記憶容量や長い処理時間を要しないで移動体の移動方向を計測できる携帯機器を提供することである。
【課題を解決するための手段】
【0009】
地磁気を検出するX軸用、Y軸用及びZ軸用からなる3軸の地磁気センサと加速度を検出するX軸用、Y軸用及びZ軸用からなる3軸の加速度センサとを備え、前記3軸の加速度センサが検出した加速度データから携帯機器の姿勢角度、携帯機器の姿勢及び第一の計算値群を算出する加速度演算部と、前記3軸の地磁気センサが検出した地磁気データから携帯機器の方向を算出する方位演算部と、前記第一の計算値群を複数の閾値と比較することで前記携帯機器の方向から移動体の移動方向を算出する移動方向演算部とを備えることを特徴とする。
【0010】
このような態様であれば、前記地磁気センサと前記加速度センサを備える前記携帯機器に、簡便な演算法を備える前記移動方向演算部を追加することで前記移動方向を算出することが可能となる。
【0011】
よって、本発明によれば、GPSの利用が難しい建造物の内部やその周辺で、大きい記憶容量や長い処理時間を要しないで前記移動体の前記移動方向を計測できる前記携帯機器を提供することができる。
【0012】
前記第一の計算値群が、前記X軸用、Y軸用及びZ軸用からなる3軸の内の1軸の加速度であることが好ましい。
【0013】
このような態様であれば、前記3軸の内の1軸の加速度の絶対値及び前記3軸の内の1軸の加速度を閾値と比較することで、前記携帯機器の方向から前記移動方向を簡便に算出することが可能となる。
【0014】
前記加速度演算部が前記加速度データから第二の計算値群を算出し、前記移動方向演算部が前記第一の計算値群から歩数を算出し、前記第二の計算値群から歩行の有無を判定し、前記移動方向に歩幅×前記歩数の距離を起点から累積的に繋いで位置を求めることで、移動経路を算出する移動経路演算部を備えたことを特徴とする。
【0015】
このような態様であれば、前記移動方向を算出できる前記携帯機器に簡便な演算法を備える前記移動経路演算部を追加することで前記移動経路を算出することが可能となる。
【0016】
よって、GPSの利用が難しい建造物の内部やその周辺で、大きい記憶容量や長い処理時間を要しないで前記移動経路を計測できる前記携帯機器を提供することができる。
【0017】
前記第一の計算値群が前記X軸用、Y軸用及びZ軸用からなる3軸の内の1軸の加速度であること及び前記第二の計算値群が前記X軸用、Y軸用及びZ軸用からなる3軸加速度の長さ、3軸加速度の長さの平均値及び3軸加速度の分散値であることが好ましい。
【0018】
このような態様であれば、前記移動経路を簡便に算出することが可能である。
【0019】
地磁気を検出するX軸用、Y軸用及びZ軸用からなる3軸の地磁気センサと、加速度を検出するX軸用、Y軸用及びZ軸用からなる3軸の加速度センサと、前記3軸の加速度センサが検出した加速度データを演算処理する加速度演算部と、前記3軸の地磁気センサが検出した地磁気データを演算処理する方位演算部と、移動体の移動方向を算出する移動方向演算部とを備える携帯機器において、加速度演算部が第一の計算値群を算出し、前記第一の計算値群を複数の閾値と比較することで、携帯機器の方向から移動体の移動方向を算出することを特徴とする。
【0020】
このような態様であれば、前記第一の計算値群を前記複数の閾値と比較し簡単な関係式によって前記携帯機器の方向から前記移動方向を算出できるので、大きい記憶容量や長い処理時間を要しないで前記移動方向を算出する、即ち、簡便な演算法を備える移動方向演算部を可能とする。
【0021】
前記第一の計算値群を複数の閾値と比較することで歩数を算出し、前記加速度演算部が第二の計算値群を算出し前記第二の計算値群を複数の閾値と比較することで歩行の有無を判定し、前記移動方向に歩幅×前記歩数の距離を起点から累積的に繋いで位置を求めることで、移動経路を算出することが好ましい。
【0022】
このような態様であれば、前記第一の計算値群を前記複数の閾値と比較する簡便な方法で歩数を算出し、前記第二の計算値群を複数の閾値と比較する簡便な方法で歩行の有無を判定し、大きい記憶容量や長い処理時間を要しないで前記移動経路を算出する、即ち、簡便な演算法を備える前記移動経路演算部を可能とする。
【0023】
前記第一の計算値群が前記X軸用、Y軸用及びZ軸用からなる3軸の内の1軸の加速度であることが好ましい。
【0024】
このような態様であれば、前記3軸の内の1軸の加速度を用いて、簡便に移動方向及び移動経路を算出できる。
【0025】
前記第一の計算値群が前記X軸用、Y軸用及びZ軸用からなる3軸の内の1軸の加速度であること及び前記第二の計算値群が3軸加速度の長さ、前記3軸加速度の長さの平均値及び3軸加速度の分散値であることが好ましい。
【0026】
このような態様であれば、前記3軸の内の1軸の加速度、前記3軸加速度の長さ、前記3軸加速度の長さの平均値及び前記3軸加速度の分散値を用いて、簡便に移動経路を算出できる。
【0027】
前記携帯機器の方向から前記移動方向を算出するに当って、携帯機器の姿勢が縦向きと判定された後に3軸の内の1軸の加速度の絶対値が第二閾値以下なら、前記移動方向は前記携帯機器の方向と同じであると判定し、前記携帯機器の姿勢が縦向きと判定された後に前記3軸の内の1軸の加速度の絶対値が前記第二閾値以上なら、前記移動方向は前記携帯機器の方向と異なると判定し、前記3軸の内の1軸の加速度が第三閾値以上なら、前記移動方向は前記携帯機器の方向に90を減算した値と、前記3軸の内の1軸の加速度が前記第三閾値以下なら、前記移動方向は前記携帯機器の方向に90を加算した値と算出することが好ましい。
【0028】
このような態様であれば、閾値との比較により区分け、それぞれの簡単な関係式によって前記携帯機器の方向から前記移動方向を簡便に算出できるので、大きい記憶容量や長い処理時間を要しないで、即ち、簡便な演算法で前記移動方向を算出することが可能となる。
【0029】
前記3軸加速度の分散値が第四閾値より大きくかつ第五閾値より小さく、及び前記3軸加速度の長さから前記3軸加速度の長さの平均値を差し引いた値が第六閾値より大きければ歩行していると判定し、前記移動方向に歩幅×前記歩数の距離を起点から累積的に繋いで位置を求めることで、前記移動経路を算出することが好ましい。
【0030】
このような態様であれば、閾値との比較による簡便な手法で移動経路が算出できるので、大きい記憶容量や長い処理時間を要しないで、即ち、簡便な演算法で前記移動経路を算出することが可能となる。
【発明の効果】
【0031】
本発明によれば、地磁気センサと加速度センサを備える従来の携帯機器に、簡便な演算法を備える移動方向演算部を追加することで移動体の移動方向を算出することが可能となる。
【0032】
よって、本発明によれば、GPSの利用が難しい建造物の内部やその周辺で、大きい記憶容量や長い処理時間を要しないで移動体の移動方向を計測できる携帯機器を提供することが可能である。
【図面の簡単な説明】
【0033】
【図1】本発明の一実施形態における自律航法機能の概略構成を示すブロック図である。
【図2】本発明の一実施形態における携帯機器に搭載された加速度センサと地磁気センサとの模式図である。
【図3】携帯機器の姿勢角度を説明する図である。
【図4】携帯機器の姿勢を説明する図である。
【図5】携帯機器の方向を説明する図である。
【図6】携帯機器が体の右側面で振られている際の、移動方向と携帯機器の方向との関係を説明する図である。
【図7】携帯機器が体の左側面で振られている際の、移動方向と携帯機器の方向との関係を説明する図である。
【図8】携帯機器が体の側面で振られている際の、移動方向と携帯機器の方向との関係を説明する図である。
【図9】起点(始動点)から現時点までの移動経路を算出する方法を説明する図である。
【発明を実施するための形態】
【0034】
本発明の一実施形態は、電波が微弱なためにGPSによる位置計測の精度が劣る建造物等の内部やその周辺で、移動者が携帯機器1の自律航法機能を始動した起点から移動を開始し、各地点での移動方向や前記起点からの移動経路を計測することに適用される。
【0035】
本発明の一実施形態では、携帯機器1は携帯電話90であり、移動体は歩行者であり、移動方法は歩行である。
【0036】
ただし、本発明は、歩行者や歩行による移動のみに限定されるものではなく、歩行者以外の移動体や歩行以外の移動方法に適用することも可能である。
【0037】
以下に、本発明の一実施形態について説明する。携帯機器1は、始動時には歩行者の前面に保持され、移動時には歩行者の前面に保持されているか、または歩行者の左右の側面で振られていることを想定している。
【0038】
図1は、本発明の一実施形態における自律航法機能の概略構成を示すブロック図2である。なお、図1では詳細な説明に必要な構成を示すが、携帯機器1として必須の構成であっても本明細書において説明しないものについては省略している。
【0039】
図2に、本発明の一実施形態における携帯機器1に搭載された加速度センサ11と地磁気センサ21との模式図を示す。加速度センサ11は、加速度センサのX軸センサ12、加速度センサのY軸センサ13、加速度センサのZ軸センサ14を備え、地磁気センサ21は、地磁気センサのX軸センサ22、地磁気センサのY軸センサ23、地磁気センサのZ軸センサ24を備えている。また、加速度センサ11と地磁気センサ21の各軸の方向は同じである。
【0040】
携帯機器1は、図1に示すように、加速度センサ11、地磁気センサ21、信号処理部41、記憶部42、加速度演算部31、方位演算部32、移動方向演算部33、移動経路演算部34、表示演算部35、表示部36によって構成されることで自律航法機能を備えている。
【0041】
信号処理部41は、加速度センサ11及び地磁気センサ21からの各軸のセンサ出力をA/D変換しデジタル値で記憶部42に記録する。また、記憶部42には、演算に必要な第一閾値、第二閾値、第三閾値、第四閾値、第五閾値及び第六閾値が予め記憶されている。
【0042】
以下に、加速度演算部31とその加速度演算法について説明する。歩行者の歩行方向と携帯機器1の相対的な関係を以下の方法により縦方向と横方向に分別する。携帯機器1の姿勢角度の内の一つは、一般的にロール角51と言われ、図3(a)に示すように加速センサのX軸センサ12が感知するX軸方向と水平面とがなす角度である。加速度演算部31は、記憶部42から加速度センサ11からの出力である加速度出力データ及び第一閾値を読み出し、この加速度出力データから携帯機器1のロール角51を算出する。この携帯機器1のロール角51を第一閾値と比較する。そして、携帯機器1のロール角51が第一閾値より小さい際は携帯機器1の姿勢を縦向きと判定し、大きい際は横向きと判定する。横向きは図4(a)に示すように地磁気センサのX軸センサ22の感知するX軸方向が歩行者の移動方向と同じ場合である。この場合、歩行者が画面を見るために携帯機器1は傾けられ携帯機器1のロール角51は大きい。縦向きは図4(b)に示すように地磁気センサのY軸センサ23が感知するY軸方向が歩行者の移動方向と同じ場合である。この場合も、歩行者が画面を見るために携帯機器1は傾けられ、図3(b)に示すように加速センサのY軸センサ13が感知するY軸方向と水平面とがなす角度52は大きいが、携帯機器1のロール角51は小さい。これは、歩行者が携帯機器1を縦向きに持つ際はロール角51がほとんど発生せず、横向きに持つ際に発生すると言う現象である。
【0043】
携帯機器の姿勢が横向きか縦向きかの判定結果は、図1に示すように、加速度演算部31から方位演算部32及び移動方向演算部33に出力される。図4に横向きと縦向きで歩行者に保持された様子を示した。横向きの際は、歩行者は両手でしっかりと携帯機器1を持っているので、歩行者はこの姿勢を保持して歩行し、体の側面で携帯機器1を振ることはないと推定した。よって、図4(a)に示すように、記憶部42から移動方向に向いていると推定される地磁気センサのX軸センサ22の出力データを読み出し、これより携帯機器の方向62を算出している。この際は、歩行者の移動方向と携帯機器の方向62とは一致している。縦向きで歩行者の前面に保持されている際は、図4(b)に示すように、記憶部42から移動方向に向いていると推定される地磁気センサのY軸センサ23の出力データを読み出し、これより携帯機器の方向62を算出している。この際は、歩行者の移動方向と携帯機器の方向62とは一致している。縦向きで歩行者の左右の側面で振られている際は、地磁気センサのZ軸センサ24が感知するZ軸方向の出力データから携帯機器の方向62を算出している。この際は、図8に示すように、歩行者の移動方向と携帯機器の方向62とは一致しておらず、地磁気センサのZ軸センサ24が感知するZ軸方向は歩行者に向いている。
【0044】
そして、縦向きで歩行者の前面に保持されている際は、図5に示すように、地磁気センサのY軸センサ23が感知するY軸方向と地磁気との成す角度(θ)を携帯機器の方向62とし、地磁気の方向を基準とし反時計回りを正と定義している。地磁気センサのX軸センサ22、地磁気センサのZ軸センサ24によって携帯機器の方向62が計測される場合も同じである。このように方位演算部32は携帯機器の方向62を算出する。
【0045】
地磁気センサのX軸センサ22が感知するX軸方向及び地磁気センサのY軸センサ23が感知するY軸方向が歩行者の移動する方向に向いている際は、携帯機器の方向62は移動方向と一致するので問題ない。
【0046】
ところが、携帯機器1を持つ手が体の側面で振られている際には、携帯機器の方向62と歩行者の移動方向は一致しておらず、携帯機器の方向62を補正して移動方向を算出することが必要である。
【0047】
本発明の一実施形態では、携帯機器1は、始動時には歩行者の前面に横向き又は縦向きで保持され、歩行時には歩行者の前面に横向き又は縦向きに保持されているか、または、図8に示すように歩行者の左右の側面で前後に振られ、加速度センサのY軸センサ13が感知するY軸方向が回転中心(歩行者の肩)から外側に向き、加速度センサのZ軸センサ14が感知するZ軸方向が歩行者に向いた状態を想定している。
【0048】
加速度演算部31は、記憶部42から加速度センサのX軸センサ12の出力データを読み出し移動方向演算部33に出力する。ここでは、第一の計算群である3軸内の1軸の加速度は、加速度センサのX軸センサ12の出力データである。
【0049】
加速度演算部31は、加速度センサ11の3軸の出力データの分散値を算出する。この分散値を3軸加速度の分散値σと名付けるが、この分散値は移動経路演算部34に出力される。3軸加速度の分散値σは、加速度センサ11のX軸センサ、Y軸センサ、Z軸センサの3軸の出力から合成されるベクトルの分散値である。即ち、X軸センサ、Y軸センサ及びZ軸センサの出力値からそれぞれの平均値を差し引いた値を二乗し加算した平方根の総和を、計算に使ったデータ数である母数で割った値であり、(1)式で表される。ここでは、3軸加速度の分散値σは第二の計算群である。
【0050】
【数1】
【0051】
加速度演算部31は、加速度センサ11の3軸の出力データから、その長さを算出し、その長さの平均値も計算する。3軸加速度の長さrと3軸加速度の長さの平均値r(av)は移動経路演算部34に出力される。3軸加速度の長さrは、加速度センサ11のX軸センサ、Y軸センサ、Z軸センサの3軸の出力から合成されるベクトルの長さである。即ち、3軸の出力値を二乗し、それを和して平方根した値であり、(2)式で表される。3軸加速度の長さの平均値r(av)は、(3)式で表される。ここでは、3軸加速度の長さr、3軸加速度の長さの平均値r(av)は第二の計算群である。
【0052】
【数2】
【0053】
以下に、移動方向演算部33が備える移動方向を補正する自律航法演算法について説明する。
【0054】
携帯機器1が横向きと判定された際は、上述したように歩行者は横向きに保持して歩行すると推定される。図4(a)に示すように、加速度センサのX軸センサ12の感知するX軸方向と歩行者の移動方向とは同じなので、歩行者の移動方向と携帯機器の方向62とは一致しており、
移動方向(θ‘)=携帯機器の方向62(θ)
とする。また、この結果は、移動経路演算部34に出力される。
【0055】
加速度センサのX軸センサ12の出力値の絶対値は、携帯機器1が体の側面で振られている場合に比べて体の前面にほぼ固定され保持されている場合の方が小さいことが確認されている。よって、加速度センサのX軸センサ12の出力値の絶対値が記憶部42から読み出した第二閾値より小さい際は、歩行者は携帯機器1を体の前面で手に保持して歩行していると推定される。
【0056】
携帯機器1が縦向きと判定された後に、移動方向演算部33は、加速度センサのX軸センサ12の出力値の絶対値と第二閾値とを比較する。そして、前者が後者より小さい際には、歩行者の前面に携帯機器1は縦向きに保持されていると推定する。そして、歩行者の移動方向は携帯機器の方向62に一致していると判定し、
移動方向(θ‘)=携帯機器の方向62(θ)
とする。また、この結果は、移動経路演算部34に出力される。
【0057】
歩行者の前面に携帯機器1が保持され歩行者が歩行する際には、加速度センサ11の出力は、歩行動作で生じる上下動作に伴い経時的な周期的波形となる。移動経路演算部34は、前記移動方向(θ‘)に歩幅×歩数の距離を起点から累積的に繋いで移動経路を算出する。この演算は、加速度センサ11の出力の一周期を単位になされるが、この一周期は、ここでは、上下動作である1歩に相当する。この結果は、移動経路演算部34に出力される。
【0058】
縦向きと判定された後に、加速度センサのX軸センサ12の出力値の絶対値が第二閾値より大きい際は、携帯機器1は体の側面で振られていると推定される。
【0059】
携帯機器1が体の側面で振られていると推定された際は、移動方向演算部33は、加速度センサのX軸センサ12の出力値と記憶部42から読み出した第三閾値とを比較する。前者が後者より大きい際には、加速度センサのX軸センサ12が感知するX軸方向が移動方向を向いていると判定する。この状態を図8(a)に示した。この際の携帯機器1の状態変化を図6によって説明する。始動時は、体の前面で右手に携帯機器1が持たれ、次に体の前面で携帯機器1が反時計回りに90度回転され、そして携帯機器1は体の右側面に移動させられ、X軸方向は移動方向に向きZ軸方向は体の方に向いて振られる。よって、Z軸方向はX軸方向に対して+90度回転しているので、携帯機器の方向62(θ)(Z軸方向)は、移動方向(θ‘)(X軸方向)より+90度大きいので、
移動方向(θ‘)=携帯機器の方向62(θ)−90
と補正される。その結果は、移動経路演算部34に出力される。
【0060】
また、移動方向演算部33は、加速度センサのX軸センサ12の出力値と第三閾値を比較し、前者が後者より小さい際には、加速度センサのX軸センサ12が感知するX軸方向が移動方向の逆を向いていると判定する。この状態を図8(b)に示した。この際の携帯機器1の状態変化を図7によって説明する。始動時は、体の前面で左手に携帯機器1が持たれ、次に体の前面で携帯機器1が時計回りに90度回転され、そして携帯機器1は体の左側面に移動させられ、X軸方向は移動方向の逆に向きZ軸方向は体の方に向いて振られる。よって、Z軸方向は移動方向対して−90度回転しているので、携帯機器の方向62(θ)(Z軸方向)は、移動方向(θ‘)より+90度小さいので、
移動方向(θ‘)=携帯機器の方向62(θ)+90
と補正される。その結果は、移動経路演算部34に出力される。
【0061】
携帯機器1が体の側面で振られていると推定された際には、加速度センサ11の出力は、携帯機器1が体の側面で前後に振られる動作に伴い経時的な周期的波形となる。この前後に携帯機器1が振られる一周期の間に、歩行者は2歩進む。この結果は、移動経路演算部34に出力される。
【0062】
上述のように、閾値との比較により区分け、それぞれの簡単な関係式によって携帯機器1の方向から移動方向を簡便に算出している。よって、大きい記憶容量や長い処理時間を要しないで移動方向を算出することが可能となる。
【0063】
以下に、移動経路演算部34が備える移動経路を算出する自律航法演算法について説明する。
【0064】
歩行者の前面に携帯機器1が横向き及び縦向きに保持されていると判定された際、移動経路演算部34は、加速度演算部31から出力された3軸加速度の分散値σと第四閾値及び第五閾値とを比較する。3軸加速度の分散値σが、第四閾値より小さければ歩行者は歩行してないと推定され、この際は移動方向と携帯機器の方向62は一致するので、
移動方向(θ‘)=携帯機器の方向62(θ)
に歩幅×0歩の距離を現時点までの移動経路に繋いで、移動経路を算出する。ただし、この際は、歩幅×0歩のため移動距離はゼロなので、移動経路は生じない。
また、3軸加速度の分散値σが、第五閾値より大きければ異常時であり、移動経路は算出しない。
【0065】
3軸加速度の分散値σが、第四閾値より小さい際は、携帯機器1がほぼ静止した状態であり、歩行者は歩いていないと判定され、3軸加速度の分散値σが第五閾値より大きい際は、携帯機器1が激しく動かされている等の異常な場合と想定されるので、移動経路は算出しない。
【0066】
3軸加速度の長さrは3軸加速度の長さの平均値r(av)に対して、歩行時には大きく、歩行していない際はほぼ同じである。
【0067】
そして、歩行者の前面に携帯機器1が横向き及び縦向きに保持されていると判定された際、3軸加速度の分散値σが、第四閾値より大きく第五閾値より小さい際には、移動経路演算部34は、3軸加速度の長さから3軸加速度の長さの平均値を差し引いた値と第六閾値を比較する。
【0068】
3軸加速度の長さから3軸加速度の長さの平均値を差し引いた値が第六閾値前者より小さい際は、歩行者は歩行してないと推定され、この際は移動方向と携帯機器の方向62は一致するので、
移動方向(θ‘)=携帯機器の方向62(θ)
に歩幅×0歩の距離を現時点までの移動経路に繋いで、移動経路64を算出する。ただし、この際は、歩幅×0歩のため移動距離はゼロなので、移動経路は生じない。
【0069】
3軸加速度の長さから3軸加速度の長さの平均値を差し引いた値が第六閾値前者より大きい際は、歩行者は歩行していると推定され、移動方向と携帯機器の方向62は一致するので、
移動方向(θ‘)=携帯機器の方向62(θ)
に歩幅×1歩の距離を現時点までの移動経路に繋いで、移動経路を算出する。
【0070】
移動経路の算出について図9にて説明する。起点(始動点)から現時点までに、移動方向がθ1からθnまで変化したとする。この間の、移動方向θiの区間で、加速度センサの波形の周期がni回であったとすると、移動方向θiの区間での移動距離は歩幅×歩数×niとなる。歩行者の前面に携帯機器1が保持され歩行者が歩行する際は歩数は1であり、歩行者の側面で携帯機器1が振られ歩行者が歩行する際は歩数は2である。移動方向θ1からθnまで、移動方向θiに歩幅×歩数×niの移動距離を繋ぐことで、起点(始動点)から現時点までの移動経路が算出される。この算出方法は一例であって、移動経路を正しく算出できる他の算出方法を用いても構わない。
【0071】
携帯機器1が体の側面で振られている際、移動経路演算部34は、3軸加速度の分散値σと第四閾値及び第五閾値とを比較する。3軸加速度の分散値σが、第四閾値より小さくければ、歩行者は歩行してないと推定され、
移動方向(θ‘)=携帯機器の方向62(θ)+90
または
移動方向(θ‘)=携帯機器の方向62(θ)−90
に歩幅×0歩の距離を現時点までの移動経路に繋いで、移動経路を算出する。ただし、この際は、歩幅×0歩のため移動距離はゼロなので、移動経路は生じない。また、3軸加速度の分散値σが、第五閾値より大きければ異常時であり、移動経路は算出しない。
【0072】
携帯機器1が体の側面で振られている際、3軸加速度の分散値σが、第四閾値より大きくかつ第五閾値より小さい際には、移動経路演算部34は、3軸加速度の長さrから3軸加速度の長さの平均値r(av)を差し引いた値と第六閾値を比較する。
【0073】
3軸加速度の長さrから3軸加速度の長さの平均値r(av)を差し引いた値が第六閾値より小さい際は、歩行者は歩行してないと推定され、
移動方向(θ‘)=携帯機器の方向62(θ)+90
または
移動方向(θ‘)=携帯機器の方向62(θ)−90
に歩幅×0歩の距離を現時点までの移動経路に繋いで、移動経路を算出する。ただし、この際は、歩幅×0歩のため移動距離はゼロなので、移動経路は生じない。
【0074】
携帯機器1が体の側面で振られている際、3軸加速度の長さrから3軸加速度の長さの平均値r(av)を差し引いた値が第六閾値より大きい際は、歩行者は歩行していると推定され
移動方向(θ‘)=携帯機器の方向62(θ)+90
または
移動方向(θ‘)=携帯機器の方向62(θ)−90
に歩幅×2歩の距離を現時点までの移動経路に繋いで、移動経路を算出する。
【0075】
移動経路演算部34は、時々刻々に算出された移動方向に歩幅×歩数を時間経過に伴い繋いで、歩行者の移動経路を算出する。そして、表示演算部35によって表示部36に表示される。
【0076】
上述のように、閾値との比較による簡便な手法で移動方向及び移動経路を算出している。よって、大きい記憶容量や長い処理時間を要しないで移動方向及び移動経路を算出することが可能となる。
【0077】
ところが、特許文献1に記載された従来技術においては、以下に記述するように複雑な方法によって、移動方向を算出している。このことが、本発明が解決しようとした課題である。
【0078】
ほぼ固定されて保持された際は、加速度データ群から重力加速度を算出し、この重力加速度に直交する平面上に投影された加速度データ群の一歩の期間に相当する周波数成分に基づいて、進行方向計測装置に付随する端末座標系から見た歩行者の移動方向を推定する。次に、地磁気データ群と端末座標系の前記移動方向に基づいて、地上座標系での移動方向63を算出している。
【0079】
また、歩行者の体の横で振られている際は、加速度データのノルムから計算した加速度ノルムデータ群及び加速度データ群の一歩の期間に相当する周波数成分に基づいて、振りの最下点での端末座標系から見た重力加速度を算出し、重力加速度に直交する平面上に投影された加速度データ群の二歩の期間の周波数成分に基づいて、振りの最下点での端末座標系から見た歩行者の移動方向を推定する。次に、振りの最下点での地磁気データと端末座標系の前記移動方向に基づいて、地上座標系での移動方向を算出している。
【0080】
このように、特許文献1に記載された従来技術においては、膨大なデータ量を使って演算を行うために大きなメモリ容量が必要であり、膨大なデータ量を処理するために演算に時間を要し応答速度が遅くなる問題があった。
【0081】
本発明の一実施形態においては、携帯機器1が歩行者の前面に保持されているか、体の左右で振られていると言う状況を設定し、上述のように、閾値との比較を主とする簡便な演算で移動方向及び移動経路を算出している。このようにして、大きい記憶容量や長い時間を要する複雑な処理を避けることが好ましいと言う携帯電話に代表される携帯機器1の要望に応えている。
【0082】
本発明の一実施形態では携帯機器1として携帯電話90としたが、本発明は携帯電話90に限られるのではなく、加速度センサ11及び地磁気センサ21を備える携帯用情報端末、ゲーム携帯、腕時計等の電子機器であっても構わない。
【0083】
本発明は、地図がある場合に限定されるものではない。地図がなくても構わない。
【符号の説明】
【0084】
1 携帯機器
2 ブロック図
11 加速度センサ
12 加速度センサのX軸センサ
13 加速度センサのY軸センサ
14 加速度センサのZ軸センサ
21 地磁気センサ
22 地磁気センサのX軸センサ
23 地磁気センサのY軸センサ
24 地磁気センサのZ軸センサ
31 加速度演算部
32 方位演算部
33 移動方向演算部
34 移動経路演算部
35 表示演算部
36 表示部
41 信号処理部
42 記憶部
51 ロール角
52 加速センサのY軸センサ13が感知するY軸方向と水平面とがなす角度
62 携帯機器の方向
90 携帯電話
【特許請求の範囲】
【請求項1】
地磁気を検出するX軸用、Y軸用及びZ軸用からなる3軸の地磁気センサと、
加速度を検出するX軸用、Y軸用及びZ軸用からなる3軸の加速度センサと、
を備え、
前記3軸の加速度センサが検出した加速度データから、携帯機器の姿勢角度、携帯機器の姿勢及び第一の計算値群を算出する加速度演算部と、
前記3軸の地磁気センサが検出した地磁気データから携帯機器の方向を算出する方位演算部と、
前記第一の計算値群を複数の閾値と比較することで前記携帯機器の方向から移動体の移動方向を算出する移動方向演算部と、
を備えることを特徴とする携帯機器。
【請求項2】
前記第一の計算値群が、前記X軸用、Y軸用及びZ軸用からなる3軸の内の1軸の加速度であることを特徴とする請求項1に記載の携帯機器。
【請求項3】
前記加速度演算部が前記加速度データから第二の計算値群を算出し、
前記移動方向演算部が前記第一の計算値群から歩数を算出し、
前記第二の計算値群から歩行の有無を判定し、前記移動方向に歩幅×前記歩数の距離を起点から累積的に繋いで位置を求めることで、移動経路を算出する移動経路演算部を備えたことを特徴とする請求項1または請求項2に記載の携帯機器。
【請求項4】
前記第一の計算値群が前記X軸用、Y軸用及びZ軸用からなる3軸の内の1軸の加速度であること及び前記第二の計算値群が前記X軸用、Y軸用及びZ軸用からなる3軸加速度の長さ、3軸加速度の長さの平均値及び3軸加速度の分散値であることを特徴とする請求項3に記載の携帯機器。
【請求項5】
地磁気を検出するX軸用、Y軸用及びZ軸用からなる3軸の地磁気センサと、
加速度を検出するX軸用、Y軸用及びZ軸用からなる3軸の加速度センサと、
前記3軸の加速度センサが検出した加速度データを演算処理する加速度演算部と、
前記3軸の地磁気センサが検出した地磁気データを演算処理する方位演算部と、
移動体の移動方向を算出する移動方向演算部と、
を備える携帯機器において、
加速度演算部が第一の計算値群を算出し、
前記第一の計算値群を複数の閾値と比較することで、携帯機器の方向から移動体の移動方向を算出することを特徴とする自律航法演算法。
【請求項6】
前記第一の計算値群を複数の閾値と比較することで歩数を算出し、
前記加速度演算部が第二の計算値群を算出し、
前記第二の計算値群を複数の閾値と比較することで歩行の有無を判定し、前記移動方向に歩幅×前記歩数の距離を起点から累積的に繋いで位置を求めることで、移動経路を算出することを特徴とする請求項5に記載の自律航法演算法。
【請求項7】
前記第一の計算値群が前記X軸用、Y軸用及びZ軸用からなる3軸の内の1軸の加速度であることを特徴とする請求項5に記載の自律航法演算法。
【請求項8】
前記第一の計算値群が前記X軸用、Y軸用及びZ軸用からなる3軸の内の1軸の加速度であること及び前記第二の計算値群が3軸加速度の長さ、前記3軸加速度の長さの平均値及び3軸加速度の分散値であることを特徴とする請求項6に記載の自律航法演算法。
【請求項9】
前記携帯機器の方向から前記移動方向を算出するに当って、
携帯機器の姿勢が縦向きと判定された後に3軸の内の1軸の加速度の絶対値が第二閾値以下なら、前記移動方向は前記携帯機器の方向と同じであると判定し、
前記携帯機器の姿勢が縦向きと判定された後に前記3軸の内の1軸の加速度の絶対値が前記第二閾値以上なら、前記移動方向は前記携帯機器の方向と異なると判定し、
前記3軸の内の1軸の加速度が第三閾値以上なら、前記移動方向は前記携帯機器の方向に90を減算した値と、
前記3軸の内の1軸の加速度が前記第三閾値以下なら、前記移動方向は前記携帯機器の方向に90を加算した値と、
算出することを特徴とする請求項5に記載の自律航法演算法。
【請求項10】
前記3軸加速度の分散値が第四閾値より大きくかつ第五閾値より小さく、及び前記3軸加速度の長さから前記3軸加速度の長さの平均値を差し引いた値が第六閾値より大きければ歩行していると判定し、
前記移動方向に歩幅×前記歩数の距離を起点から累積的に繋いで位置を求めることで、前記移動経路を算出することを特徴とする請求項8に記載の自律航法演算法。
【請求項1】
地磁気を検出するX軸用、Y軸用及びZ軸用からなる3軸の地磁気センサと、
加速度を検出するX軸用、Y軸用及びZ軸用からなる3軸の加速度センサと、
を備え、
前記3軸の加速度センサが検出した加速度データから、携帯機器の姿勢角度、携帯機器の姿勢及び第一の計算値群を算出する加速度演算部と、
前記3軸の地磁気センサが検出した地磁気データから携帯機器の方向を算出する方位演算部と、
前記第一の計算値群を複数の閾値と比較することで前記携帯機器の方向から移動体の移動方向を算出する移動方向演算部と、
を備えることを特徴とする携帯機器。
【請求項2】
前記第一の計算値群が、前記X軸用、Y軸用及びZ軸用からなる3軸の内の1軸の加速度であることを特徴とする請求項1に記載の携帯機器。
【請求項3】
前記加速度演算部が前記加速度データから第二の計算値群を算出し、
前記移動方向演算部が前記第一の計算値群から歩数を算出し、
前記第二の計算値群から歩行の有無を判定し、前記移動方向に歩幅×前記歩数の距離を起点から累積的に繋いで位置を求めることで、移動経路を算出する移動経路演算部を備えたことを特徴とする請求項1または請求項2に記載の携帯機器。
【請求項4】
前記第一の計算値群が前記X軸用、Y軸用及びZ軸用からなる3軸の内の1軸の加速度であること及び前記第二の計算値群が前記X軸用、Y軸用及びZ軸用からなる3軸加速度の長さ、3軸加速度の長さの平均値及び3軸加速度の分散値であることを特徴とする請求項3に記載の携帯機器。
【請求項5】
地磁気を検出するX軸用、Y軸用及びZ軸用からなる3軸の地磁気センサと、
加速度を検出するX軸用、Y軸用及びZ軸用からなる3軸の加速度センサと、
前記3軸の加速度センサが検出した加速度データを演算処理する加速度演算部と、
前記3軸の地磁気センサが検出した地磁気データを演算処理する方位演算部と、
移動体の移動方向を算出する移動方向演算部と、
を備える携帯機器において、
加速度演算部が第一の計算値群を算出し、
前記第一の計算値群を複数の閾値と比較することで、携帯機器の方向から移動体の移動方向を算出することを特徴とする自律航法演算法。
【請求項6】
前記第一の計算値群を複数の閾値と比較することで歩数を算出し、
前記加速度演算部が第二の計算値群を算出し、
前記第二の計算値群を複数の閾値と比較することで歩行の有無を判定し、前記移動方向に歩幅×前記歩数の距離を起点から累積的に繋いで位置を求めることで、移動経路を算出することを特徴とする請求項5に記載の自律航法演算法。
【請求項7】
前記第一の計算値群が前記X軸用、Y軸用及びZ軸用からなる3軸の内の1軸の加速度であることを特徴とする請求項5に記載の自律航法演算法。
【請求項8】
前記第一の計算値群が前記X軸用、Y軸用及びZ軸用からなる3軸の内の1軸の加速度であること及び前記第二の計算値群が3軸加速度の長さ、前記3軸加速度の長さの平均値及び3軸加速度の分散値であることを特徴とする請求項6に記載の自律航法演算法。
【請求項9】
前記携帯機器の方向から前記移動方向を算出するに当って、
携帯機器の姿勢が縦向きと判定された後に3軸の内の1軸の加速度の絶対値が第二閾値以下なら、前記移動方向は前記携帯機器の方向と同じであると判定し、
前記携帯機器の姿勢が縦向きと判定された後に前記3軸の内の1軸の加速度の絶対値が前記第二閾値以上なら、前記移動方向は前記携帯機器の方向と異なると判定し、
前記3軸の内の1軸の加速度が第三閾値以上なら、前記移動方向は前記携帯機器の方向に90を減算した値と、
前記3軸の内の1軸の加速度が前記第三閾値以下なら、前記移動方向は前記携帯機器の方向に90を加算した値と、
算出することを特徴とする請求項5に記載の自律航法演算法。
【請求項10】
前記3軸加速度の分散値が第四閾値より大きくかつ第五閾値より小さく、及び前記3軸加速度の長さから前記3軸加速度の長さの平均値を差し引いた値が第六閾値より大きければ歩行していると判定し、
前記移動方向に歩幅×前記歩数の距離を起点から累積的に繋いで位置を求めることで、前記移動経路を算出することを特徴とする請求項8に記載の自律航法演算法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−155477(P2012−155477A)
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願番号】特願2011−13223(P2011−13223)
【出願日】平成23年1月25日(2011.1.25)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願日】平成23年1月25日(2011.1.25)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
[ Back to top ]