
携帯端末装置の位置情報取得装置及びプログラム
【課題】携帯端末装置から送信されるGPS位置情報を用いて、その携帯端末装置が所定の領域内に存在するか否かを判定するときの判定精度を向上させる。
【解決手段】時刻“7”でGPS位置情報の示す位置が領域A内であると判定し、“NULL”状態から“ARRIVE”状態に遷移する。その後、時刻“8”、“9”で、GPS位置情報の示す位置が2回続けて領域A内であると判定することで、“IN”状態に遷移し、携帯端末装置4が領域A内に存在すると判定する。
【解決手段】時刻“7”でGPS位置情報の示す位置が領域A内であると判定し、“NULL”状態から“ARRIVE”状態に遷移する。その後、時刻“8”、“9”で、GPS位置情報の示す位置が2回続けて領域A内であると判定することで、“IN”状態に遷移し、携帯端末装置4が領域A内に存在すると判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、携帯端末装置の位置情報をネットワークを通して取得する装置及びプログラムに関する。
【背景技術】
【0002】
近年、GPS(Global Positioning System)受信機を内蔵した携帯電話機やPDA(Personal Digital Assistant)など、通信機能及び自己位置検出機能を有する携帯端末装置が普及してきている。また、無線基地局と通信を行うことで自己位置を検出する携帯端末装置も知られている(特許文献1)。
【0003】
これらの携帯端末装置のユーザは、ネットワークを介して現在位置に関連する様々なサービス、例えば現在位置付近を含む領域に関連付けられた広告などの情報の提供を受けることができる(特許文献2)。
【0004】
このような携帯端末装置の現在位置を含む領域に関連付けられた情報を提供するサービスを行う際には、情報を提供する側が、携帯端末装置が所定の領域内に存在することを正確に知る必要がある。
【0005】
しかしながら、携帯端末装置で測定した自己位置情報(以下、端末測位情報と言う)は誤差を含んでいるため、情報を提供する側が、携帯端末装置から送信された端末測位置情報をそのまま用いて、携帯端末装置が所定の領域内に存在するか否かを判定したのでは正しい判定結果が得られないことがある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2002−310692号公報
【特許文献2】特開2005−184271号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、このような問題を解決するためになされたものであり、その目的は、携帯端末装置から送信される端末測位情報を用いて、携帯端末装置が所定の領域内に存在するか否かを判定するときの判定精度を向上させることである。
【課題を解決するための手段】
【0008】
本発明は、携帯端末装置から送信される端末測位情報を用いて、その携帯端末装置が所定の領域内に存在するか否かを判定する携帯端末装置の位置情報取得装置であって、前記端末測位情報の示す位置が前記領域内に存在するか否か判定する第1の判定手段と、前記第1の判定手段が所定の回数連続して前記端末測位情報の示す位置が前記領域内に存在すると判定するか、又は所定時間以上前記領域内に存在すると判定した場合に、前記携帯端末装置が前記領域内に存在すると判定する第2の判定手段とを有することを特徴とする携帯端末装置の位置情報取得装置である。
【0009】
[作用]
本発明によれば、携帯端末装置が所定の領域内に存在するか否かを判定する際、前記携帯端末装置から送信される端末測位情報の示す位置が前記領域内に存在すると所定の回数連続して判定された場合、又は所定時間以上前記領域内に存在すると判定された場合に、前記携帯端末装置が前記領域内に存在すると判定する。
【発明の効果】
【0010】
本発明によれば、携帯端末装置からの端末測位情報を用いて、携帯端末装置が所定の領域内に存在するか否かを判定するときの判定精度が向上する。
【図面の簡単な説明】
【0011】
【図1】本発明の実施形態の位置情報取得システムを示す図である。
【図2】図1における携帯端末装置の電気的構成を示すブロック図である。
【図3】図2におけるGPS受信機の測位レベルと誤差範囲との関係を示す図である。
【図4】図1における位置情報取得サーバの電気的構成を示すブロック図である。
【図5】図1における携帯端末装置の動作を示すフローチャートである。
【図6】図1における位置情報取得サーバの概略動作を示すフローチャートである。
【図7】図6における位置情報取得処理の内容を示す状態遷移図である。
【図8】図7において使用される端末装置管理テーブルを示す図である。
【図9】GPS位置情報を算出した時刻と所定の領域の内外と状態との関係の一例を示す図である。
【図10】図9に示す位置を所定の領域の内外にプロットした図である。
【図11】GPS位置情報を算出した時刻と所定の領域の内外と状態との関係の別の一例を示す図である。
【図12】図11に示す位置を所定の領域の内外にプロットした図である。
【図13】GPS位置情報を算出した時刻と所定の領域の内外と状態との関係のさらに別の一例を示す図である。
【図14】図13に示す位置を所定の領域の内外にプロットした図である。
【発明を実施するための形態】
【0012】
以下、本発明を実施するための形態について図面を参照して説明する。
〈位置情報取得システムの構成〉
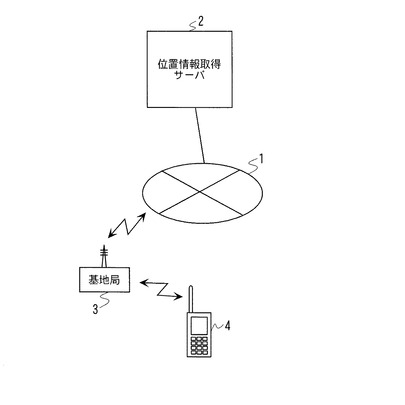
図1は、本発明の実施形態の位置情報取得システムを示す図である。このシステムは、インターネットなどのネットワーク1に接続される位置情報取得サーバ2と、基地局3経由でネットワーク1に接続される携帯端末装置4からなる。携帯端末装置4は携帯電話機、PDA、PND(Personal Navigation Device)などである。携帯端末装置4と位置情報取得サーバ2とは、基地局3及びネットワーク1を介して通信可能である。位置情報取得サーバ2が、本発明の位置情報取得装置に対応する。
【0013】
〈携帯端末装置の構成〉
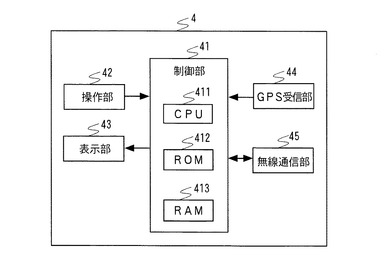
図2は携帯端末装置4のブロック図である。この携帯端末装置4は制御部41、操作部42、表示部43、GPS受信部44、及び無線通信部45を備えている。
【0014】
制御部41は携帯端末装置4の各部を制御するためのコントローラであり、CPU(Central Processing Unit)411と、ROM(Read Only Memory)412と、RAM(Random Access Memory)413とを備えている。CPU411はROM412に記憶されたプログラムをRAM413にロードして実行することで、後述する種々の処理を実現する。
【0015】
操作部42は、この携帯端末装置4をユーザが操作するための各種ボタンからなる。表示部43は、この携帯端末装置4の動作状態や、操作部42からユーザが入力した情報などを表示するための液晶表示装置などからなる。
【0016】
GPS受信部44は制御部41の指示に従って一定時間(例えば5分)毎にGPS衛星から送信された電波を受信し、現在位置を測定(測位)する。そして、端末測位情報としてのGPS位置情報、測定時刻情報、及びGPS位置情報の誤差範囲(測定精度)を示す測位レベル情報を制御部41へ出力する。
【0017】
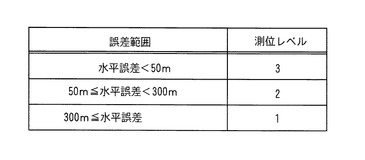
図3に測位レベルと誤差範囲との関係を示す。本実施形態では、測定位置の水平誤差が50m未満の場合をレベル3、50m以上300m未満の場合をレベル2、300m以上の場合をレベル1とした。ただし、これは一例であって、測位レベルの数、水平誤差範囲の距離がこれ以外の値であってもよいことは言うまでもない。なお、測位レベル情報は、例えば測位に用いたGPS衛星の数、GPS衛星からの電波の受信信号のS/Nなどに基づいて作成することができる。
【0018】
図2の説明に戻る。無線通信部45は基地局3との間で無線通信を行うための回路である。無線通信部45は基地局3を介して位置情報取得サーバ2にアクセスし、携帯端末装置4のGPS受信部44で生成されたGPS位置情報、測定時刻情報、及び測位レベル情報、並びにROM412に保存されている携帯端末装置4の端末装置IDを送信することができる。
【0019】
〈位置情報取得収集サーバの構成〉
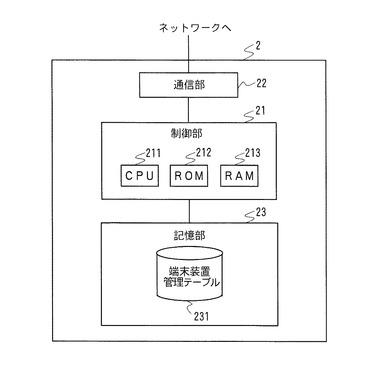
位置情報取得サーバ2は、図4に示すように、制御部21、通信部22、及び記憶部23を備えている。
【0020】
制御部21はCPU211、ROM212、及びRAM213を含み、この位置情報取得サーバ全体の制御などを行う。また、CPU211は、ROM212に記憶されたプログラムをRAM213にロードして実行することで、後述する種々の処理を実現する。
【0021】
通信部22はネットワーク1及び基地局3を介して携帯端末装置4と通信を行う。記憶部23はHDD(ハードディスク装置)からなり、端末装置管理テーブル231が設けられている。
【0022】
端末装置管理テーブル231は、携帯端末装置4から送信されたGPS位置情報、測定時刻情報、測位レベル情報、及び端末装置IDなどを用いて、携帯端末装置4の位置情報を管理するためのテーブルである。このテーブルの内容については後述する。
【0023】
〈位置情報取得システムの動作〉
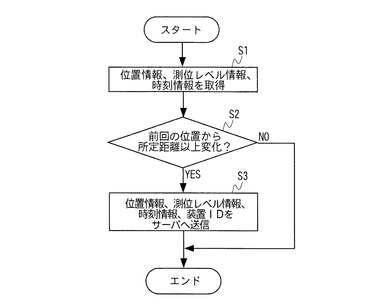
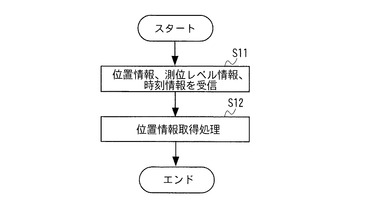
以上の構成を有する位置情報取得システムの概略動作について、図5及び図6に示すフローチャートを用いて説明する。ここで、図5は携帯端末装置4の動作であり、図6は位置情報取得サーバ2の動作である。
【0024】
携帯端末装置4では、図示されていないタイマが一定時間(例えば5分)をカウントする毎に図5に示すフローがスタートすると、まずCPU411は、GPS受信部44に対し、GPS位置情報、測定時刻情報、及び測位レベル情報を要求し、それらを取得する(ステップS1)。
【0025】
次にCPU411は、前回のGPS位置情報と比較し、今回のGPS位置情報の示す位置が前回のGPS位置情報の示す位置から所定距離以上変化しているか否かを判定する(ステップS2)。
【0026】
判定の結果、所定距離以上変化していた場合(S2:YES)は、今回のGPS位置情報、測位レベル情報、及び測定時刻情報を、無線通信部44を通して位置情報取得サーバ2へ送信し(ステップS3)、処理を終了する。判定の結果、所定距離以上変化していなかった場合(S2:NO)はそのまま処理を終了する。
【0027】
位置情報取得サーバ2では、制御部22のCPU211が、携帯端末装置4からのGPS位置情報、測位レベル情報、及び測定時刻情報を、通信部22を通して受信する(ステップS11)。次いでCPU211は位置情報取得処理を行う(ステップS12)。
【0028】
〈位置情報取得処理の内容〉
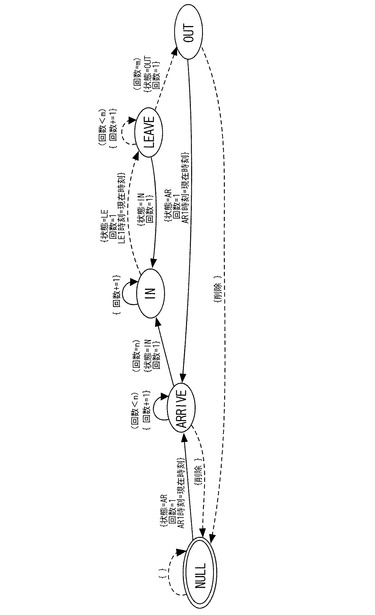
位置情報取得処理(S12)の内容について、図7に示す状態遷移図及び図8に示す端末装置管理テーブル231を参照して説明する。
【0029】
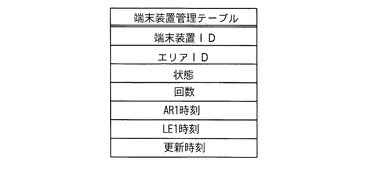
図7において、実線はGPS位置情報の示す位置が所定の領域内の場合の動作であり、破線は領域外の場合の動作である。また、図8において、“端末装置ID”は携帯端末装置4の端末装置ID、“領域ID”は領域の識別情報、“状態”は図7の状態(NULL:初期状態、ARRIVE:所定領域内判定状態、IN:所定領域内確定状態、LEAVE:所定領域外判定状態、OUT:所定領域外確定状態)を示す識別情報、“回数”はGPS位置情報の示す位置がその状態に連続して存在している回数、“AR1時刻”はARRIVE以外の状態からARRIVE状態に遷移した時刻、“LE1時刻”はLEAVE以外の状態からLEAVE状態に遷移した時刻である。“更新時刻”には、“NULL”状態以外では現在時刻が書き込まれる。
【0030】
図7において、初めの状態は“NULL”である。この状態では、端末装置管理テーブル231には何も書かれていない。GPS位置情報の示す位置が所定の領域内になると、“AR”状態に遷移するとともに、端末装置管理テーブル231の“端末装置ID”にGPS位置情報を送信した携帯端末装置4の端末装置IDが、“領域ID”に前記領域のIDが、“状態”に“ARRIVE”が、“回数”に“1”が、“AR1時刻”に現在時刻(GPS位置情報とともに受信した測定時刻情報)が、それぞれ書き込まれる。
【0031】
“ARRIVE”状態において、GPS位置情報の示す位置が所定の領域外になると、“NULL”状態に遷移するとともに、端末装置管理テーブル231の内容を削除する。
【0032】
一方、“ARRIVE”状態において、GPS位置情報の示す位置が所定の領域内に引き続き入っている場合は、端末装置管理テーブル231の“回数”をインクリメントする。そして、“回数”がn(nは予め設定された2以上の整数)に達すると、“IN”状態に遷移し、端末装置管理テーブル231の“状態”に“IN”が、“回数”に“1”が、それぞれ書き込まれる。
【0033】
“IN”状態は、携帯端末装置4の現在位置が、端末装置管理テーブル231の“領域ID”に保持されている所定の領域内に入ったとCPU411が判断したことを意味する。つまり、GPS位置情報の示す位置がn回連続して所定の領域内に存在すると判定した時点で、携帯端末装置4が所定の領域に存在すると判断する。
【0034】
“IN”状態において、GPS位置情報の示す位置が所定の領域内に引き続き入っている場合は、端末装置管理テーブル231の“回数”をインクリメントする。
【0035】
また、“IN”状態において、GPS位置情報の示す位置が所定の領域外になると、“LEAVE”状態に遷移するとともに、端末装置管理テーブル231の“状態”に“LEAVE”が、“回数”に“1”が、“LE1時刻”に現在時刻が、それぞれ書き込まれる。
【0036】
“LEAVE”状態において、GPS位置情報の示す位置が所定の領域内になると、“IN”状態に遷移するとともに、端末装置管理テーブル231の“状態”に“IN”が、“回数”に“1”が、それぞれ書き込まれる。
【0037】
また、“LEAVE”状態において、GPS位置情報の示す位置が引き続き所定の領域外である場合、端末装置管理テーブル231の“回数”をインクリメントする。そして、“回数”がm(mは予め設定された2以上の整数)に達すると、“OUT”状態に遷移し、“状態”に“OUT”が、“回数”に“1”が、それぞれ書き込まれる。
【0038】
“OUT”状態は、携帯端末装置4の現在位置が、端末装置管理テーブル231の“領域ID”に保持されている所定の領域外に出たとCPU411が判断したことを意味する。つまり、一旦、携帯端末装置4が所定の領域内に存在すると判断したときは、GPS位置情報の示す位置がn回連続して所定の領域外に存在すると判定した時点で、携帯端末装置4が所定の領域外に出たと判断する。
【0039】
“OUT”状態において、GPS位置情報の示す位置が所定の領域内になると、“ARRIVE”状態に遷移するとともに、端末装置管理テーブル231の“状態”に“ARRIVE”が、“回数”に“1”が、“AR1時刻”に現在時刻が、それぞれ書き込まれる。
【0040】
“OUT”状態において、GPS位置情報の示す位置が引き続き所定の領域外である場合、“NULL”状態に遷移するとともに、端末装置管理テーブル231の内容を削除する。
【0041】
〈位置情報取得処理の具体例〉
以上説明した位置情報取得処理の内容について、図9〜図14を参照して具体的に説明する。
【0042】
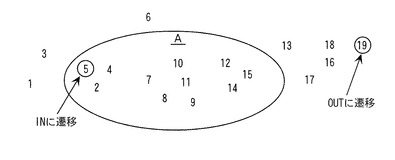
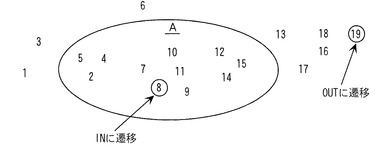
ここで、図9、図11、図13はGPS位置情報の時刻と所定の領域の内外と状態との関係の3つ例を示し、図10、図12、図14は、それぞれ図9、図11、図13に示す位置を所定の領域の内外にプロットした図である。
【0043】
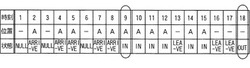
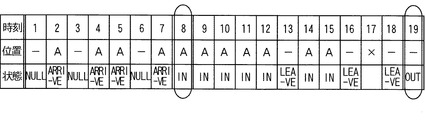
また、図9、図11、図13において、「時刻」の欄の番号は、携帯端末装置4からのGPS位置情報の測定時刻の順番に対応する。さらに、「位置」の欄の「A」、「−」、「×」は、それぞれ、GPS位置情報の示す位置が領域A内であること、領域A外であること、測位レベルが閾値以下(レベル1以下、又はレベル2以下)などの理由で無視(領域の内外の判定対象から除外)することを意味する。換言すれば、測位レベルが閾値を越える(レベル1を超える、即ちレベル2以上、又はレベル2を超える、即ちレベル3)場合のみ判定対象とする。また、これらの図は、2以上の任意の値に設定可能なn、mをともに3とした場合を示しているが、n、mを互いに異なる値としてもよい。
【0044】
図9、図10の場合、時刻“7”で“NULL”状態から“ARRIVE”状態に遷移し、その後、時刻“8”、“9”と、GPS位置情報の示す位置が2回続けて領域A内であると判定することで、“IN”状態に遷移し、携帯端末装置4が領域A内に存在すると判定する。また、時刻“16”で“LEAVE”状態に遷移し、その後、時刻“17”、“18”と、GPS位置情報の示す位置が2回続けて領域A外であると判定することで、“OUT”状態に遷移し、携帯端末装置4が領域A外に存在すると判定する。
【0045】
図11、図12の場合、時刻“2”で“NULL”状態から“ARRIVE”状態に遷移し、その後、時刻“3”のGPS位置情報を無視し、時刻“4”、“5”と、GPS位置情報の示す位置が2回続けて領域A内であると判定することで、“IN”状態に遷移し、携帯端末装置4が領域A内に存在すると判定する。また、時刻“16”で“LEAVE”状態に遷移し、その後、時刻“17”のGPS位置情報を無視し、時刻“18”、“19”と、GPS位置情報の示す位置が2回続けて領域A外であると判定することで、“OUT”状態に遷移し、携帯端末装置4が領域A外に存在すると判定する。
【0046】
図13、図14の場合、時刻“7”で“NULL”状態から“ARRIVE”状態に遷移し、その次の時刻“8”でGPS位置情報の示す位置が2回続けて領域A内であると判定することで、“IN”状態に遷移している。これは、時刻“8”と時刻“7”との時間差が所定の時間以上であるため、その間、携帯端末装置4が移動していないと判断したことによるものである。なお、時刻“8”の位置が領域A外であった場合は、“OUT”状態に遷移する。
【0047】
以上詳細に説明したように、本発明の実施形態によれば、位置情報取得サーバ2は、携帯端末装置4からのGPS位置情報の示す位置が最初に所定の領域内に入ったとき、引き続き(n−1)回連続して所定の領域内であった場合、又は次のGPS位置情報を受信するまでの時間が所定時間以上であり、かつそのGPS位置情報の示す位置が引き続き所定の領域内であった場合に、携帯端末装置4が所定の領域内に入ったと判定するので、GPS位置情報をそのまま用いて、携帯端末装置が所定の領域内に存在するか否かを判定する場合と比べ、精度の高い判定が可能である。
【0048】
従って、領域に関連付けられた情報を提供する情報提供サーバを図1のネットワーク1上に設け、位置情報取得サーバ2に判定結果を用いて、その情報提供サーバの情報送信動作を制御することにより、携帯端末装置4の現在位置を含む領域に関連付けられた情報を適切に提供することができる。
【0049】
なお、本発明は下記(1)〜(3)のような変形が可能である。
(1)時間的に前後する2つのGPS位置情報とその時間差とから、携帯端末装置4の移動速度を算出し、その算出値が所定の速度以上の場合、後から受信したGPS位置情報を無視する。換言すれば、その算出値が所定の速度未満の場合のみ、後から受信したGPS位置情報を判定対象とする。その算出値が所定の速度以上の場合は領域を通り越した可能性が高いからである。
(2)携帯端末装置4から送信されるGPS位置情報の示す位置が、予めGPS衛星から送信される電波の受信状態が悪い時に測位されると分かっている位置と一致し、かつ測位レベル情報が高い測位レベルを示している場合、そのGPS位置情報を無視する。
(3)携帯端末装置4に振動センサを設けるとともに、その出力を基に携帯端末装置4が移動していると判定された場合のみ、GPS受信部44がGPS位置情報、測定時刻情報、及び測位レベル情報を出力する。
【符号の説明】
【0050】
2…位置情報取得サーバ、4…携帯端末装置、21…制御部、22…通信部、23…記憶部、231…端末装置管理テーブル。
【技術分野】
【0001】
本発明は、携帯端末装置の位置情報をネットワークを通して取得する装置及びプログラムに関する。
【背景技術】
【0002】
近年、GPS(Global Positioning System)受信機を内蔵した携帯電話機やPDA(Personal Digital Assistant)など、通信機能及び自己位置検出機能を有する携帯端末装置が普及してきている。また、無線基地局と通信を行うことで自己位置を検出する携帯端末装置も知られている(特許文献1)。
【0003】
これらの携帯端末装置のユーザは、ネットワークを介して現在位置に関連する様々なサービス、例えば現在位置付近を含む領域に関連付けられた広告などの情報の提供を受けることができる(特許文献2)。
【0004】
このような携帯端末装置の現在位置を含む領域に関連付けられた情報を提供するサービスを行う際には、情報を提供する側が、携帯端末装置が所定の領域内に存在することを正確に知る必要がある。
【0005】
しかしながら、携帯端末装置で測定した自己位置情報(以下、端末測位情報と言う)は誤差を含んでいるため、情報を提供する側が、携帯端末装置から送信された端末測位置情報をそのまま用いて、携帯端末装置が所定の領域内に存在するか否かを判定したのでは正しい判定結果が得られないことがある。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2002−310692号公報
【特許文献2】特開2005−184271号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、このような問題を解決するためになされたものであり、その目的は、携帯端末装置から送信される端末測位情報を用いて、携帯端末装置が所定の領域内に存在するか否かを判定するときの判定精度を向上させることである。
【課題を解決するための手段】
【0008】
本発明は、携帯端末装置から送信される端末測位情報を用いて、その携帯端末装置が所定の領域内に存在するか否かを判定する携帯端末装置の位置情報取得装置であって、前記端末測位情報の示す位置が前記領域内に存在するか否か判定する第1の判定手段と、前記第1の判定手段が所定の回数連続して前記端末測位情報の示す位置が前記領域内に存在すると判定するか、又は所定時間以上前記領域内に存在すると判定した場合に、前記携帯端末装置が前記領域内に存在すると判定する第2の判定手段とを有することを特徴とする携帯端末装置の位置情報取得装置である。
【0009】
[作用]
本発明によれば、携帯端末装置が所定の領域内に存在するか否かを判定する際、前記携帯端末装置から送信される端末測位情報の示す位置が前記領域内に存在すると所定の回数連続して判定された場合、又は所定時間以上前記領域内に存在すると判定された場合に、前記携帯端末装置が前記領域内に存在すると判定する。
【発明の効果】
【0010】
本発明によれば、携帯端末装置からの端末測位情報を用いて、携帯端末装置が所定の領域内に存在するか否かを判定するときの判定精度が向上する。
【図面の簡単な説明】
【0011】
【図1】本発明の実施形態の位置情報取得システムを示す図である。
【図2】図1における携帯端末装置の電気的構成を示すブロック図である。
【図3】図2におけるGPS受信機の測位レベルと誤差範囲との関係を示す図である。
【図4】図1における位置情報取得サーバの電気的構成を示すブロック図である。
【図5】図1における携帯端末装置の動作を示すフローチャートである。
【図6】図1における位置情報取得サーバの概略動作を示すフローチャートである。
【図7】図6における位置情報取得処理の内容を示す状態遷移図である。
【図8】図7において使用される端末装置管理テーブルを示す図である。
【図9】GPS位置情報を算出した時刻と所定の領域の内外と状態との関係の一例を示す図である。
【図10】図9に示す位置を所定の領域の内外にプロットした図である。
【図11】GPS位置情報を算出した時刻と所定の領域の内外と状態との関係の別の一例を示す図である。
【図12】図11に示す位置を所定の領域の内外にプロットした図である。
【図13】GPS位置情報を算出した時刻と所定の領域の内外と状態との関係のさらに別の一例を示す図である。
【図14】図13に示す位置を所定の領域の内外にプロットした図である。
【発明を実施するための形態】
【0012】
以下、本発明を実施するための形態について図面を参照して説明する。
〈位置情報取得システムの構成〉
図1は、本発明の実施形態の位置情報取得システムを示す図である。このシステムは、インターネットなどのネットワーク1に接続される位置情報取得サーバ2と、基地局3経由でネットワーク1に接続される携帯端末装置4からなる。携帯端末装置4は携帯電話機、PDA、PND(Personal Navigation Device)などである。携帯端末装置4と位置情報取得サーバ2とは、基地局3及びネットワーク1を介して通信可能である。位置情報取得サーバ2が、本発明の位置情報取得装置に対応する。
【0013】
〈携帯端末装置の構成〉
図2は携帯端末装置4のブロック図である。この携帯端末装置4は制御部41、操作部42、表示部43、GPS受信部44、及び無線通信部45を備えている。
【0014】
制御部41は携帯端末装置4の各部を制御するためのコントローラであり、CPU(Central Processing Unit)411と、ROM(Read Only Memory)412と、RAM(Random Access Memory)413とを備えている。CPU411はROM412に記憶されたプログラムをRAM413にロードして実行することで、後述する種々の処理を実現する。
【0015】
操作部42は、この携帯端末装置4をユーザが操作するための各種ボタンからなる。表示部43は、この携帯端末装置4の動作状態や、操作部42からユーザが入力した情報などを表示するための液晶表示装置などからなる。
【0016】
GPS受信部44は制御部41の指示に従って一定時間(例えば5分)毎にGPS衛星から送信された電波を受信し、現在位置を測定(測位)する。そして、端末測位情報としてのGPS位置情報、測定時刻情報、及びGPS位置情報の誤差範囲(測定精度)を示す測位レベル情報を制御部41へ出力する。
【0017】
図3に測位レベルと誤差範囲との関係を示す。本実施形態では、測定位置の水平誤差が50m未満の場合をレベル3、50m以上300m未満の場合をレベル2、300m以上の場合をレベル1とした。ただし、これは一例であって、測位レベルの数、水平誤差範囲の距離がこれ以外の値であってもよいことは言うまでもない。なお、測位レベル情報は、例えば測位に用いたGPS衛星の数、GPS衛星からの電波の受信信号のS/Nなどに基づいて作成することができる。
【0018】
図2の説明に戻る。無線通信部45は基地局3との間で無線通信を行うための回路である。無線通信部45は基地局3を介して位置情報取得サーバ2にアクセスし、携帯端末装置4のGPS受信部44で生成されたGPS位置情報、測定時刻情報、及び測位レベル情報、並びにROM412に保存されている携帯端末装置4の端末装置IDを送信することができる。
【0019】
〈位置情報取得収集サーバの構成〉
位置情報取得サーバ2は、図4に示すように、制御部21、通信部22、及び記憶部23を備えている。
【0020】
制御部21はCPU211、ROM212、及びRAM213を含み、この位置情報取得サーバ全体の制御などを行う。また、CPU211は、ROM212に記憶されたプログラムをRAM213にロードして実行することで、後述する種々の処理を実現する。
【0021】
通信部22はネットワーク1及び基地局3を介して携帯端末装置4と通信を行う。記憶部23はHDD(ハードディスク装置)からなり、端末装置管理テーブル231が設けられている。
【0022】
端末装置管理テーブル231は、携帯端末装置4から送信されたGPS位置情報、測定時刻情報、測位レベル情報、及び端末装置IDなどを用いて、携帯端末装置4の位置情報を管理するためのテーブルである。このテーブルの内容については後述する。
【0023】
〈位置情報取得システムの動作〉
以上の構成を有する位置情報取得システムの概略動作について、図5及び図6に示すフローチャートを用いて説明する。ここで、図5は携帯端末装置4の動作であり、図6は位置情報取得サーバ2の動作である。
【0024】
携帯端末装置4では、図示されていないタイマが一定時間(例えば5分)をカウントする毎に図5に示すフローがスタートすると、まずCPU411は、GPS受信部44に対し、GPS位置情報、測定時刻情報、及び測位レベル情報を要求し、それらを取得する(ステップS1)。
【0025】
次にCPU411は、前回のGPS位置情報と比較し、今回のGPS位置情報の示す位置が前回のGPS位置情報の示す位置から所定距離以上変化しているか否かを判定する(ステップS2)。
【0026】
判定の結果、所定距離以上変化していた場合(S2:YES)は、今回のGPS位置情報、測位レベル情報、及び測定時刻情報を、無線通信部44を通して位置情報取得サーバ2へ送信し(ステップS3)、処理を終了する。判定の結果、所定距離以上変化していなかった場合(S2:NO)はそのまま処理を終了する。
【0027】
位置情報取得サーバ2では、制御部22のCPU211が、携帯端末装置4からのGPS位置情報、測位レベル情報、及び測定時刻情報を、通信部22を通して受信する(ステップS11)。次いでCPU211は位置情報取得処理を行う(ステップS12)。
【0028】
〈位置情報取得処理の内容〉
位置情報取得処理(S12)の内容について、図7に示す状態遷移図及び図8に示す端末装置管理テーブル231を参照して説明する。
【0029】
図7において、実線はGPS位置情報の示す位置が所定の領域内の場合の動作であり、破線は領域外の場合の動作である。また、図8において、“端末装置ID”は携帯端末装置4の端末装置ID、“領域ID”は領域の識別情報、“状態”は図7の状態(NULL:初期状態、ARRIVE:所定領域内判定状態、IN:所定領域内確定状態、LEAVE:所定領域外判定状態、OUT:所定領域外確定状態)を示す識別情報、“回数”はGPS位置情報の示す位置がその状態に連続して存在している回数、“AR1時刻”はARRIVE以外の状態からARRIVE状態に遷移した時刻、“LE1時刻”はLEAVE以外の状態からLEAVE状態に遷移した時刻である。“更新時刻”には、“NULL”状態以外では現在時刻が書き込まれる。
【0030】
図7において、初めの状態は“NULL”である。この状態では、端末装置管理テーブル231には何も書かれていない。GPS位置情報の示す位置が所定の領域内になると、“AR”状態に遷移するとともに、端末装置管理テーブル231の“端末装置ID”にGPS位置情報を送信した携帯端末装置4の端末装置IDが、“領域ID”に前記領域のIDが、“状態”に“ARRIVE”が、“回数”に“1”が、“AR1時刻”に現在時刻(GPS位置情報とともに受信した測定時刻情報)が、それぞれ書き込まれる。
【0031】
“ARRIVE”状態において、GPS位置情報の示す位置が所定の領域外になると、“NULL”状態に遷移するとともに、端末装置管理テーブル231の内容を削除する。
【0032】
一方、“ARRIVE”状態において、GPS位置情報の示す位置が所定の領域内に引き続き入っている場合は、端末装置管理テーブル231の“回数”をインクリメントする。そして、“回数”がn(nは予め設定された2以上の整数)に達すると、“IN”状態に遷移し、端末装置管理テーブル231の“状態”に“IN”が、“回数”に“1”が、それぞれ書き込まれる。
【0033】
“IN”状態は、携帯端末装置4の現在位置が、端末装置管理テーブル231の“領域ID”に保持されている所定の領域内に入ったとCPU411が判断したことを意味する。つまり、GPS位置情報の示す位置がn回連続して所定の領域内に存在すると判定した時点で、携帯端末装置4が所定の領域に存在すると判断する。
【0034】
“IN”状態において、GPS位置情報の示す位置が所定の領域内に引き続き入っている場合は、端末装置管理テーブル231の“回数”をインクリメントする。
【0035】
また、“IN”状態において、GPS位置情報の示す位置が所定の領域外になると、“LEAVE”状態に遷移するとともに、端末装置管理テーブル231の“状態”に“LEAVE”が、“回数”に“1”が、“LE1時刻”に現在時刻が、それぞれ書き込まれる。
【0036】
“LEAVE”状態において、GPS位置情報の示す位置が所定の領域内になると、“IN”状態に遷移するとともに、端末装置管理テーブル231の“状態”に“IN”が、“回数”に“1”が、それぞれ書き込まれる。
【0037】
また、“LEAVE”状態において、GPS位置情報の示す位置が引き続き所定の領域外である場合、端末装置管理テーブル231の“回数”をインクリメントする。そして、“回数”がm(mは予め設定された2以上の整数)に達すると、“OUT”状態に遷移し、“状態”に“OUT”が、“回数”に“1”が、それぞれ書き込まれる。
【0038】
“OUT”状態は、携帯端末装置4の現在位置が、端末装置管理テーブル231の“領域ID”に保持されている所定の領域外に出たとCPU411が判断したことを意味する。つまり、一旦、携帯端末装置4が所定の領域内に存在すると判断したときは、GPS位置情報の示す位置がn回連続して所定の領域外に存在すると判定した時点で、携帯端末装置4が所定の領域外に出たと判断する。
【0039】
“OUT”状態において、GPS位置情報の示す位置が所定の領域内になると、“ARRIVE”状態に遷移するとともに、端末装置管理テーブル231の“状態”に“ARRIVE”が、“回数”に“1”が、“AR1時刻”に現在時刻が、それぞれ書き込まれる。
【0040】
“OUT”状態において、GPS位置情報の示す位置が引き続き所定の領域外である場合、“NULL”状態に遷移するとともに、端末装置管理テーブル231の内容を削除する。
【0041】
〈位置情報取得処理の具体例〉
以上説明した位置情報取得処理の内容について、図9〜図14を参照して具体的に説明する。
【0042】
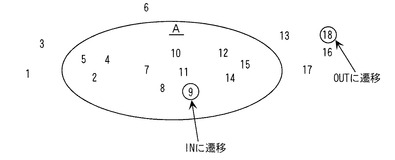
ここで、図9、図11、図13はGPS位置情報の時刻と所定の領域の内外と状態との関係の3つ例を示し、図10、図12、図14は、それぞれ図9、図11、図13に示す位置を所定の領域の内外にプロットした図である。
【0043】
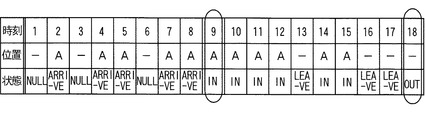
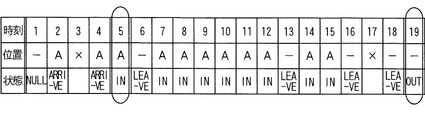
また、図9、図11、図13において、「時刻」の欄の番号は、携帯端末装置4からのGPS位置情報の測定時刻の順番に対応する。さらに、「位置」の欄の「A」、「−」、「×」は、それぞれ、GPS位置情報の示す位置が領域A内であること、領域A外であること、測位レベルが閾値以下(レベル1以下、又はレベル2以下)などの理由で無視(領域の内外の判定対象から除外)することを意味する。換言すれば、測位レベルが閾値を越える(レベル1を超える、即ちレベル2以上、又はレベル2を超える、即ちレベル3)場合のみ判定対象とする。また、これらの図は、2以上の任意の値に設定可能なn、mをともに3とした場合を示しているが、n、mを互いに異なる値としてもよい。
【0044】
図9、図10の場合、時刻“7”で“NULL”状態から“ARRIVE”状態に遷移し、その後、時刻“8”、“9”と、GPS位置情報の示す位置が2回続けて領域A内であると判定することで、“IN”状態に遷移し、携帯端末装置4が領域A内に存在すると判定する。また、時刻“16”で“LEAVE”状態に遷移し、その後、時刻“17”、“18”と、GPS位置情報の示す位置が2回続けて領域A外であると判定することで、“OUT”状態に遷移し、携帯端末装置4が領域A外に存在すると判定する。
【0045】
図11、図12の場合、時刻“2”で“NULL”状態から“ARRIVE”状態に遷移し、その後、時刻“3”のGPS位置情報を無視し、時刻“4”、“5”と、GPS位置情報の示す位置が2回続けて領域A内であると判定することで、“IN”状態に遷移し、携帯端末装置4が領域A内に存在すると判定する。また、時刻“16”で“LEAVE”状態に遷移し、その後、時刻“17”のGPS位置情報を無視し、時刻“18”、“19”と、GPS位置情報の示す位置が2回続けて領域A外であると判定することで、“OUT”状態に遷移し、携帯端末装置4が領域A外に存在すると判定する。
【0046】
図13、図14の場合、時刻“7”で“NULL”状態から“ARRIVE”状態に遷移し、その次の時刻“8”でGPS位置情報の示す位置が2回続けて領域A内であると判定することで、“IN”状態に遷移している。これは、時刻“8”と時刻“7”との時間差が所定の時間以上であるため、その間、携帯端末装置4が移動していないと判断したことによるものである。なお、時刻“8”の位置が領域A外であった場合は、“OUT”状態に遷移する。
【0047】
以上詳細に説明したように、本発明の実施形態によれば、位置情報取得サーバ2は、携帯端末装置4からのGPS位置情報の示す位置が最初に所定の領域内に入ったとき、引き続き(n−1)回連続して所定の領域内であった場合、又は次のGPS位置情報を受信するまでの時間が所定時間以上であり、かつそのGPS位置情報の示す位置が引き続き所定の領域内であった場合に、携帯端末装置4が所定の領域内に入ったと判定するので、GPS位置情報をそのまま用いて、携帯端末装置が所定の領域内に存在するか否かを判定する場合と比べ、精度の高い判定が可能である。
【0048】
従って、領域に関連付けられた情報を提供する情報提供サーバを図1のネットワーク1上に設け、位置情報取得サーバ2に判定結果を用いて、その情報提供サーバの情報送信動作を制御することにより、携帯端末装置4の現在位置を含む領域に関連付けられた情報を適切に提供することができる。
【0049】
なお、本発明は下記(1)〜(3)のような変形が可能である。
(1)時間的に前後する2つのGPS位置情報とその時間差とから、携帯端末装置4の移動速度を算出し、その算出値が所定の速度以上の場合、後から受信したGPS位置情報を無視する。換言すれば、その算出値が所定の速度未満の場合のみ、後から受信したGPS位置情報を判定対象とする。その算出値が所定の速度以上の場合は領域を通り越した可能性が高いからである。
(2)携帯端末装置4から送信されるGPS位置情報の示す位置が、予めGPS衛星から送信される電波の受信状態が悪い時に測位されると分かっている位置と一致し、かつ測位レベル情報が高い測位レベルを示している場合、そのGPS位置情報を無視する。
(3)携帯端末装置4に振動センサを設けるとともに、その出力を基に携帯端末装置4が移動していると判定された場合のみ、GPS受信部44がGPS位置情報、測定時刻情報、及び測位レベル情報を出力する。
【符号の説明】
【0050】
2…位置情報取得サーバ、4…携帯端末装置、21…制御部、22…通信部、23…記憶部、231…端末装置管理テーブル。
【特許請求の範囲】
【請求項1】
携帯端末装置から送信される端末測位情報を用いて、その携帯端末装置が所定の領域内に存在するか否かを判定する携帯端末装置の位置情報取得装置であって、
前記端末測位情報の示す位置が前記領域内に存在するか否か判定する第1の判定手段と、
前記第1の判定手段が所定の回数連続して前記端末測位情報の示す位置が前記領域内に存在すると判定するか、又は所定時間以上前記領域内に存在すると判定した場合に、前記携帯端末装置が前記領域内に存在すると判定する第2の判定手段と
を有することを特徴とする携帯端末装置の位置情報取得装置。
【請求項2】
請求項1に記載された携帯端末装置の位置情報取得装置において、
前記端末測位情報には、その精度を示す測位レベル情報が含まれており、
前記第1の判定手段は、前記測位レベル情報の示す精度が予め定められた閾値を超える場合のみ、判定対象とすることを特徴とする携帯端末装置の位置情報取得装置。
【請求項3】
請求項1に記載された携帯端末装置の位置情報取得装置において、
前記端末測位情報の示す位置の変化とその間の時間差を基に前記携帯端末装置の移動速度を算出する速度算出手段を有し、
前記第1の判定手段は、前記速度算出手段で算出された速度が予め定められた閾値未満の場合のみ、前記変化後の端末測位情報を判定対象とすることを特徴とする携帯端末装置の位置情報取得装置。
【請求項4】
携帯端末装置から送信される端末測位情報を用いて、その携帯端末装置が所定の領域内に存在するか否かを判定する携帯端末装置の位置情報取得装置のコンピュータを、前記端末測位情報の示す位置が前記領域内に存在するか否か判定する第1の判定手段と、前記第1の判定手段が所定の回数連続して前記端末測位情報の示す位置が前記領域内に存在すると判定するか、又は所定時間以上前記領域内に存在すると判定した場合に、前記携帯端末装置が前記領域内に存在すると判定する第2の判定手段として機能させるためのプログラム。
【請求項1】
携帯端末装置から送信される端末測位情報を用いて、その携帯端末装置が所定の領域内に存在するか否かを判定する携帯端末装置の位置情報取得装置であって、
前記端末測位情報の示す位置が前記領域内に存在するか否か判定する第1の判定手段と、
前記第1の判定手段が所定の回数連続して前記端末測位情報の示す位置が前記領域内に存在すると判定するか、又は所定時間以上前記領域内に存在すると判定した場合に、前記携帯端末装置が前記領域内に存在すると判定する第2の判定手段と
を有することを特徴とする携帯端末装置の位置情報取得装置。
【請求項2】
請求項1に記載された携帯端末装置の位置情報取得装置において、
前記端末測位情報には、その精度を示す測位レベル情報が含まれており、
前記第1の判定手段は、前記測位レベル情報の示す精度が予め定められた閾値を超える場合のみ、判定対象とすることを特徴とする携帯端末装置の位置情報取得装置。
【請求項3】
請求項1に記載された携帯端末装置の位置情報取得装置において、
前記端末測位情報の示す位置の変化とその間の時間差を基に前記携帯端末装置の移動速度を算出する速度算出手段を有し、
前記第1の判定手段は、前記速度算出手段で算出された速度が予め定められた閾値未満の場合のみ、前記変化後の端末測位情報を判定対象とすることを特徴とする携帯端末装置の位置情報取得装置。
【請求項4】
携帯端末装置から送信される端末測位情報を用いて、その携帯端末装置が所定の領域内に存在するか否かを判定する携帯端末装置の位置情報取得装置のコンピュータを、前記端末測位情報の示す位置が前記領域内に存在するか否か判定する第1の判定手段と、前記第1の判定手段が所定の回数連続して前記端末測位情報の示す位置が前記領域内に存在すると判定するか、又は所定時間以上前記領域内に存在すると判定した場合に、前記携帯端末装置が前記領域内に存在すると判定する第2の判定手段として機能させるためのプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2011−101239(P2011−101239A)
【公開日】平成23年5月19日(2011.5.19)
【国際特許分類】
【出願番号】特願2009−255082(P2009−255082)
【出願日】平成21年11月6日(2009.11.6)
【出願人】(500578216)株式会社ゼンリンデータコム (231)
【Fターム(参考)】
【公開日】平成23年5月19日(2011.5.19)
【国際特許分類】
【出願日】平成21年11月6日(2009.11.6)
【出願人】(500578216)株式会社ゼンリンデータコム (231)
【Fターム(参考)】
[ Back to top ]