
携帯端末装置
【課題】ユーザに、進行方向の前、右又は左の向きに存在する障害物を報知することができる携帯端末装置を提供する。
【解決手段】GPSシステムから位置情報を取得する位置情報取得部11と、本装置1の向きを検出する方向センサ部17と、地図情報を取得する地図情報取得部131と、位置情報取得部11で取得した位置情報と、方向センサ部17で検出した本装置1の向きと、地図情報取得部131で取得した地図情報とに基づいて、本装置1の進行方向の前、右、左又は後の向きに存在する障害物を検出する演算部132と、本装置1の操作部14に設けた複数の振動素子と、複数の振動素子のうち、演算部132で検出した障害物の向きに対応する振動素子を振動させる振動部1410と、を備える。
【解決手段】GPSシステムから位置情報を取得する位置情報取得部11と、本装置1の向きを検出する方向センサ部17と、地図情報を取得する地図情報取得部131と、位置情報取得部11で取得した位置情報と、方向センサ部17で検出した本装置1の向きと、地図情報取得部131で取得した地図情報とに基づいて、本装置1の進行方向の前、右、左又は後の向きに存在する障害物を検出する演算部132と、本装置1の操作部14に設けた複数の振動素子と、複数の振動素子のうち、演算部132で検出した障害物の向きに対応する振動素子を振動させる振動部1410と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、携帯電話やPDA(Personal Digital Assistant)等の携帯端末装置に関し、特にナビゲーション機能を備えた携帯端末装置に関する。
【背景技術】
【0002】
歩行者の進行する経路を振動によってナビゲーションする歩行者ナビゲーション装置が知られている。例えば、特許文献1には、単一の振動部から様々な振動パターンの振動を発生させて進行方向を報知することが記載されている。また、特許文献2には、バイブレータをユーザの左右の足に取り付けて、ユーザを基準とした進行方向が右の場合には、右足に取り付けたバイブレータを振動させて、ユーザに次の経路が右であることを報知することが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】国際公開第2004/092679号パンフレット
【特許文献2】特開2003−083762号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した特許文献1及び2は、ユーザに進行方向を報知するのみであって、進行方向の前、右又は左の向きに存在する障害物を報知することはできないという課題がある。
【0005】
本発明は、係る事情に鑑みてなされたものであり、ユーザに、進行方向の前、右又は左の向きに存在する障害物を報知することができる携帯端末装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の携帯端末装置は、障害物を報知する携帯端末装置であって、SPSシステムから位置情報を取得する位置情報取得部と、当該携帯端末装置の向きを検出する方向センサ部と、地図情報を取得する地図情報取得部と、前記位置情報取得部で取得した位置情報と、前記方向センサ部で検出した当該携帯端末装置の向きと、前記地図情報取得部で取得した地図情報と、に基づいて、当該携帯端末装置の進行方向の前、右又は左の向きに存在する障害物を検出する演算部と、当該携帯端末装置の前、右及び左に振動素子を有し、前記前、右及び左の振動素子のうち、前記演算部で検出した障害物の向きに対応する振動素子を振動させる振動部と、を備える。
【0007】
上記構成によれば、携帯端末装置の前、右及び左に振動素子を有し、これらの振動素子のうち、検出した障害物の向きに対応するものを振動させて、ユーザに、進行方向の前、右又は左の向きに存在する障害物を報知するので、歩行時におけるユーザの安全をサポートすることができる。
【0008】
上記構成において、前記演算部は、前記位置情報取得部で取得した位置情報と、前記方向センサ部で検出した当該携帯端末装置の向きと、前記地図情報取得部で取得した地図情報と、に基づいて、当該携帯端末装置の進行方向の前、右又は左の向きに存在する障害物までの距離を算出し、前記振動部は、前記前、右及び左の振動素子のうち、前記演算部で検出した障害物の向きに対応する振動素子を、前記演算部で算出した障害物までの距離に対応する強度で振動させる。
【0009】
上記構成によれば、障害物の向きに対応する振動素子を、その障害物までの距離に対応する強度で振動させるので、ユーザは、障害物が存在する方向のみならず、その障害物までの距離を把握することができる。
【0010】
上記構成において、前記地図情報取得部は、無線通信ネットワークを介して、地図情報を取得する。
【0011】
上記構成によれば、常に最新の地図情報を取得できるので、新たな障害物を逃すことなく検出することが可能となる。
【0012】
上記構成において、地図情報を記憶する地図情報記憶部を備え、前記地図情報取得部は、前記地図情報記憶部から地図情報を取得する。
【0013】
上記構成によれば、地図情報記憶部を備えることで、地図情報が必要なときに直ぐに取得することができるので、処理速度の向上が図れる。
【0014】
上記構成において、前記演算部が当該携帯端末装置の進行方向の右前又は左前の向きに存在する障害物を検出した場合、前記障害物が前記進行方向を基準として所定の角度範囲内(例えば、斜め45度)に存在するとき、前記振動部は前記前の振動素子のみを振動させる。
【0015】
上記構成によれば、進行方向を基準として所定の角度範囲内は前方向として規定できるので、前の振動素子と左又は右の振動素子が同時に動作することがなく、ユーザに誤った判断をさせてしまうことがない。
【0016】
上記構成において、当該携帯端末装置の前、右及び左に点灯素子を有し、前記前、右及び左の点灯素子のうち、前記演算部で検出した障害物の向きに対応する点灯素子を点灯させる点灯部を備える。
【0017】
上記構成によれば、振動素子に加えて、携帯端末装置の前、右及び左に点灯素子を有し、これらの点灯素子のうち、検出した障害物の向きに対応するものを点灯させて、ユーザに、進行方向の前、右又は左の向きに存在する障害物を報知するので、歩行時におけるユーザの安全をサポートすることができる。
【発明の効果】
【0018】
本発明によれば、ユーザに対し、進行方向の前、右又は左の向きに存在する障害物を報知することができ、歩行時におけるユーザの安全をサポートすることができる。
【図面の簡単な説明】
【0019】
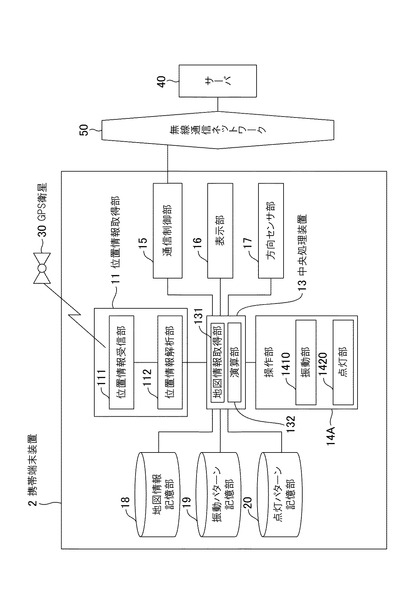
【図1】本発明の実施の形態1に係る携帯端末装置の概略構成を示すブロック図
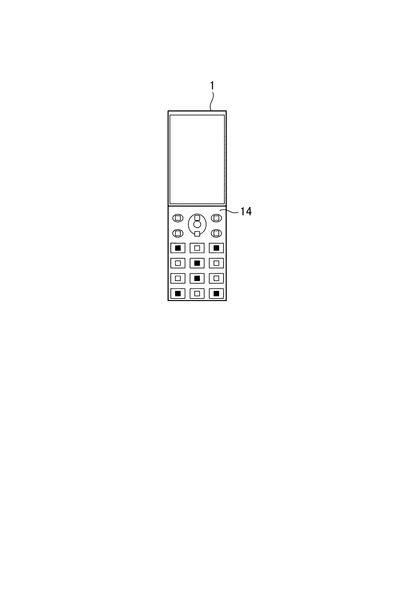
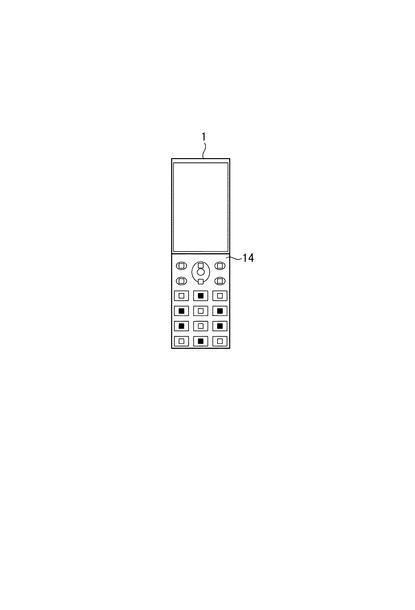
【図2】図1の携帯端末装置を示す正面図
【図3】図1の携帯端末装置の動作を説明するためのフローチャート
【図4】図1の携帯端末装置が有する“ルート外パターン”による振動状態を示す図
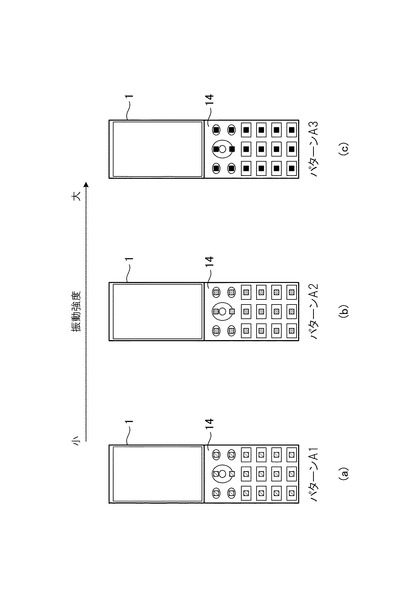
【図5】図1の携帯端末装置が有する“ガイドポイントまでの距離を報知するためのパターン”による振動状態を示す図
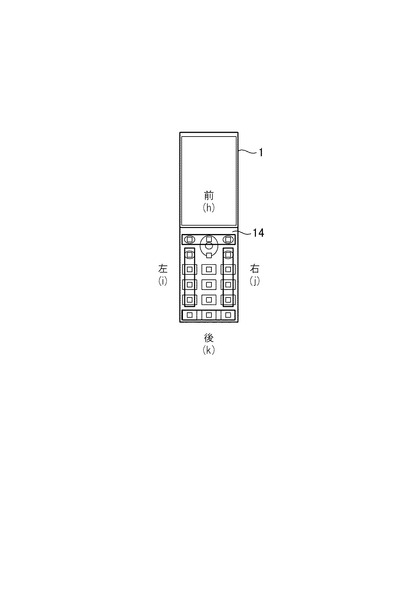
【図6】図1の携帯端末装置が有する障害物の方向を報知するためのパターンを示す図
【図7】図1の携帯端末装置が有する“障害物の方向(前)を報知するためのパターン”による振動状態を示す図
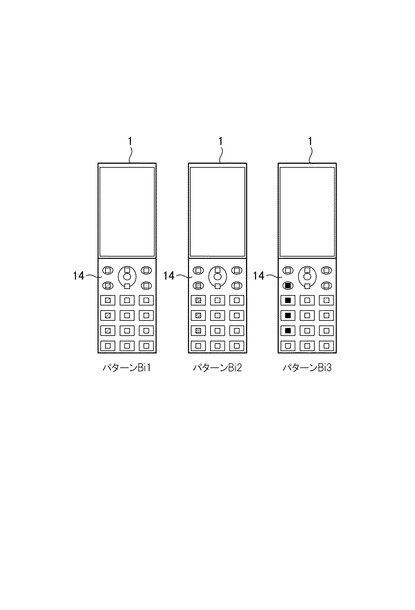
【図8】図1の携帯端末装置が有する“障害物の方向(左)を報知するためのパターン”による振動状態を示す図
【図9】図1の携帯端末装置が有する“障害物の方向(右)を報知するためのパターン”による振動状態を示す図
【図10】図1の携帯端末装置が有する“障害物の方向(後)を報知するためのパターン”による振動状態を示す図
【図11】図1の携帯端末装置が有する“右折パターン”による振動状態を示す図
【図12】図1の携帯端末装置が有する“左折パターン”による振動状態を示す図
【図13】図1の携帯端末装置が有する“直進パターン”による振動状態を示す図
【図14】図1の携帯端末装置が有する“到着パターン”による振動状態を示す図
【図15】本発明の実施の形態2に係る携帯端末装置の概略構成を示すブロック図
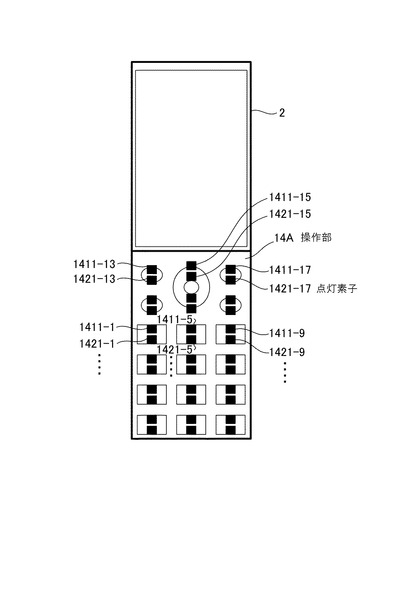
【図16】図15の携帯端末装置を示す正面図
【発明を実施するための形態】
【0020】
以下、本発明を実施するための好適な実施の形態について、図面を参照して詳細に説明する。
【0021】
(実施の形態1)
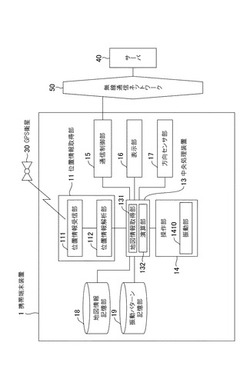
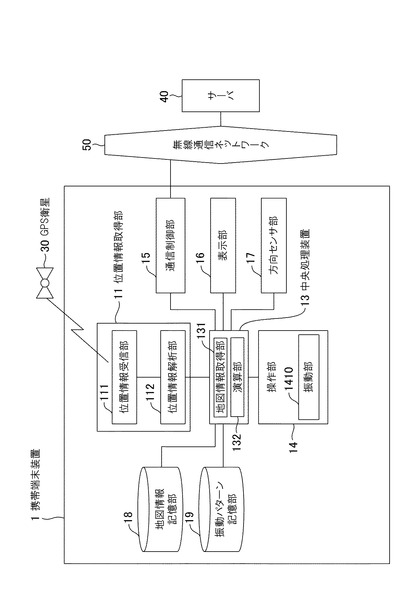
図1は、本発明の実施の形態1に係る携帯端末装置の概略構成を示すブロック図である。同図において、本実施の形態の携帯端末装置1は、歩行ナビゲーション機能を備えたものであり、位置情報取得部11と、中央処理部13と、操作部14と、通信制御部15と、表示部16と、方向センサ部17と、地図情報記憶部18と、振動パターン記憶部19とを備える。
【0022】
位置情報取得部11は、位置情報受信部111及び位置情報解析部112を備え、位置情報受信部111は、SPS(Satellite Positioning System)であるGPS(Global Positioning System)衛星30から送信された軌道情報を受信し、位置情報解析部112は、位置情報受信部111で受信した軌道情報を解析して位置情報を取得する。操作部14は、ダイヤルキー、発信/受信キー、電源/終了キー、センターキー、カーソルキーなどの複数のキーと、複数のキーのそれぞれに対応して設けられた振動素子と、各振動素子を動作させる振動部1410とを備えている。
【0023】
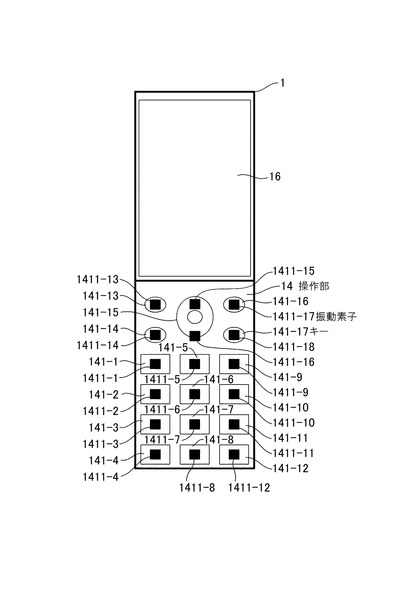
図2は、本実施の形態の携帯端末装置1を示す正面図である。同図に示すように、操作部14は、装置本体の中央部より下側に設けられている。また、複数個のキー141のそれぞれと重なるようにして振動素子1411が設けられている。振動部1410は、中央処理部13の演算部132(詳細は後述する)から与えられるパターンに対応する振動素子1411を振動させる。振動素子1411は、例えば小型モータである。
【0024】
通信制御部15は、TCP/IP(Transmission Control Protocol/Internet Protocol)などの通信プロトコルを使用して無線通信ネットワーク50と双方向通信を行う。無線通信ネットワーク50には地図情報の配信が可能なサーバ40が接続されている。表示部16は、液晶表示器や有機EL表示器(Organic Electroluminescence Display)等の表示器を備え、携帯端末装置1の使用における各種表示を行う。表示部16は、図2に示すように、装置本体の中央部より上側に設けられている。方向センサ部17は、磁気センサ、加速度センサ又は角速度センサ等を有し、携帯端末装置1の向きを検出する。地図情報記憶部18は、地図情報を記憶する。振動パターン記憶部19は、携帯端末装置1の前、右及び左の方向を振動でユーザに通知するためのパターンを記憶する。
【0025】
中央処理部13は、地図情報を取得する地図情報取得部131及び演算部132を備えている。地図情報取得部131は、地図情報記憶部18に記憶されている地図情報を取得する。また、地図情報取得部131は、通信制御部15を使用して無線通信ネットワーク50にアクセスし、無線通信ネットワーク50に接続されているサーバ40から地図情報を取得する。サーバ40から地図情報を取得した場合は、取得した地図情報を地図情報記憶部18に記憶させる。無線通信ネットワーク50を介して、地図情報を取得できるようにすることで、常に最新の地図データを得ることができ、新たな障害物を逃すことなく検出することが可能となる。また、地図情報記憶部18を有することで、地図情報が必要なときに直ぐに取得することができ、障害物の検出にかかる速度を向上できる。
【0026】
演算部132は、位置情報取得部11で取得した位置情報と、方向センサ部17で検出した携帯端末装置1の向きと、地図情報取得部131で取得した地図情報とに基づいて、携帯端末装置1の進行方向の前、右又は左の向きに存在する障害物を検出する。また、演算部132は、位置情報取得部11で取得した位置情報と、方向センサ部17で検出した携帯端末装置1の向きと、地図情報取得部131で取得した地図情報とに基づいて、携帯端末装置1の進行方向の前、右又は左の向きに存在する障害物までの距離を算出する。また、演算部132は、障害物を検出するとともに、該障害物までの距離を算出した場合に、検出した障害物の向きに対応する振動素子1411を振動させるためのパターンを振動パターン記憶部19から読み出して操作部14の振動部1410に与えるとともに、障害物までの距離を与える。
【0027】
操作部14の振動部1410は、演算部132から与えられたパターンに対応する振動素子1411を振動させるとともに、当該振動素子1411を障害物までの距離に対応する強度で振動させる。この場合、振動部1410は、演算部132が携帯端末装置1の進行方向の右前又は左前の向きに存在する障害物を検出した場合、該障害物が進行方向を基準として所定の角度範囲内(例えば、斜め45度)に存在するとき、前の振動素子1411のみを振動させる。このように、進行方向を基準として所定の角度範囲内は前方向として規定することで、前の振動素子1411と左又は右の振動素子1411が同時に動作することがなく、ユーザに誤った判断をさせてしまうことがない。
【0028】
次に、本実施の形態の携帯端末装置1の動作を説明する。
図3は、本実施の形態の携帯端末装置1の動作を説明するためのフローチャートである。また、図4、図5、図7〜図14は、本実施の形態の携帯端末装置1が有する振動パターンを説明するための図である。以下、動作の説明において図4、図5、図7〜図14に示す振動パターンを参照することとする。
【0029】
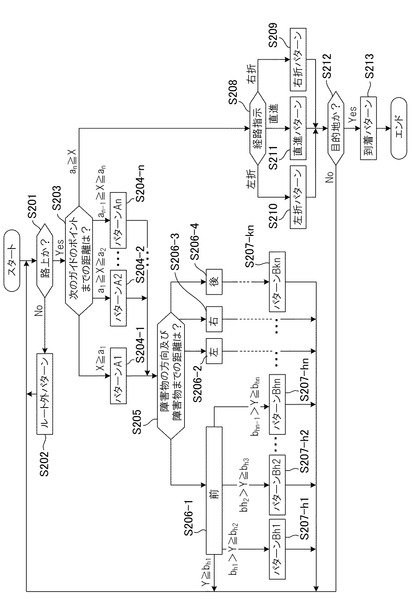
図3において、まず演算部132は、位置情報取得部11で取得した位置情報と地図情報取得部131で取得した地図情報に基づいて路上かどうか判定する(ステップS201)。路上でなければ、振動パターン記憶部19から“ルート外パターン”を読み出して操作部14の振動部1410に与える(ステップS202)。
【0030】
図4は、“ルート外パターン”による振動状態を示す図である。“ルート外パターン”は図2を参照すると、キー141−1、141−4、141−6、141−7、141−9、141−12における振動素子1411−1、1411−4、1411−6、1411−7、1411−9、1411−12が同時に振動する。この振動で略“×(ばつ)”字が表される。ユーザは手の平を操作部14に当てることで“×”を感じとることができ、ルートから外れたことを把握できる。
【0031】
演算部132は、ステップS201の判定で路上と判断すると、次のガイドのポイントまでの距離を判定する(ステップS203)。この場合、演算部132は、位置情報取得部11で取得した位置情報と地図情報取得部131で取得した地図情報に基づいて次のガイドのポイントまでの距離を求める。この判定において、次のガイドのポイントまでの距離Xが距離a1以上(X≧a1)であれば、演算部132は、振動パターン記憶部19から“パターンA1”を読み出して操作部14の振動部1410に与えるとともに、今求めた距離も操作部14の振動部1410に与える(ステップS204−1)。
【0032】
図5の(a)は、“パターンA1”による振動状態を示す図である。図2を参照すると、“パターンA1”では、全てのキー141−1〜141−17における振動素子1411−1〜1411−18が同時に振動する。このとき、次のガイドのポイントまでの距離が本処理で判断する距離のなかで一番遠いことから、振動素子1411−1〜1411−18を最小の強さで振動させる。
【0033】
また、図3のステップS203の判定において、次のガイドのポイントまでの距離Xが距離a1以下且つa2以上(a1≧X≧a2)であれば、演算部132は、振動パターン記憶部19から“パターンA2”を読み出して操作部14の振動部1410に与えるとともに、今求めた距離も操作部14の振動部1410に与える(ステップS204−2)。
【0034】
図5の(b)は、“パターンA2”による振動状態を示す図である。“パターンA2”では、上述した“パターンA1”と同様に、全てのキー141−1〜141−17における振動素子1411−1〜1411−18が同時に振動する。このとき、次のガイドのポイントまでの距離が本処理で判断する距離のなかで2番目に遠いことから、振動素子1411−1〜1411−18を“パターンA1”の場合よりも強めに振動させる。
【0035】
また、図3のステップS203の判定において、次のガイドのポイントまでの距離Xが距離a2以下且つa3以上(a2≧X≧a3)であれば、演算部132は、振動パターン記憶部19から“パターンA3”を読み出して操作部14の振動部1410に与えるとともに、今求めた距離も操作部14の振動部1410に与える(このステップは図示してない)。
【0036】
図5の(c)は、“パターンA3”による振動状態を示す図である。“パターンA3”では、上述した“パターンA1”と同様に、全てのキー141−1〜141−17における振動素子1411−1〜1411−18が同時に振動する。このとき、次のガイドのポイントまでの距離が本処理で判断する距離のなかで3番目に遠いことから、振動素子1411−1〜1411−18を“パターンA2”の場合よりも強めに振動させる。
【0037】
上記同様に、a3≧X≧a4、a4≧X≧a5、…、an−2≧X≧an−1の範囲内で、次のガイドのポイントまでの距離Xに該当するパターン(パターンA4〜パターンAn−1のうちのいずれか1つ)が決まり、そのパターンと距離Xに応じた強さで全てのキー141−1〜141−17における振動素子1411−1〜1411−18を同時に振動させる。
【0038】
そして、図3のステップS203の判定において、次のガイドのポイントまでの距離Xが距離an−1以下且つan以上(an−1≧X≧an)であれば、演算部132は、振動パターン記憶部19から“パターンAn”を読み出して操作部14の振動部1410に与えるとともに、今求めた距離も操作部14の振動部1410に与える(ステップS204−n)。
【0039】
次いで、演算部132は、障害物の方向(“前”、“左”、“右”、“後”)及び該障害物までの距離Yを判定する(ステップS205)。この場合、演算部132は、位置情報取得部11で取得した位置情報と地図情報取得部131で取得した地図情報に基づいて障害物までの距離を求める。また、演算部132は、方向センサ部17が検出した本装置1の向きから障害物の方向も判定する。これらの判定において、障害物の方向が“前”で(ステップS206−1)、障害物までの距離Yが距離bh1未満且つbh2以上(bh1>Y≧bh2)であれば、演算部132は、振動パターン記憶部19から“パターンBh1”を読み出して操作部14の振動部1410に与えるとともに、今求めた距離も操作部14の振動部1410に与える(ステップS207−h1)。
【0040】
図6は、障害物の方向を報知するためのパターンを示す図である。同図において、障害物が本装置1の“前”にある場合は、“パターンBhn”が用いられる。この“パターンBhn”では、図2を参照すると、操作部14の上端側に位置するキー141−13、141−15、141−16における振動素子1411−13、1411−15、1411−17が同時に振動する。
【0041】
また、障害物が本装置1の“左”にある場合は、“パターンBin”が用いられる。“パターンBin”では、図2を参照すると、操作部14の左端側に位置するキー141−14、141−1、141−2、141−3における振動素子1411−14、1411−1、1411−2、1411−3が同時に振動する。
【0042】
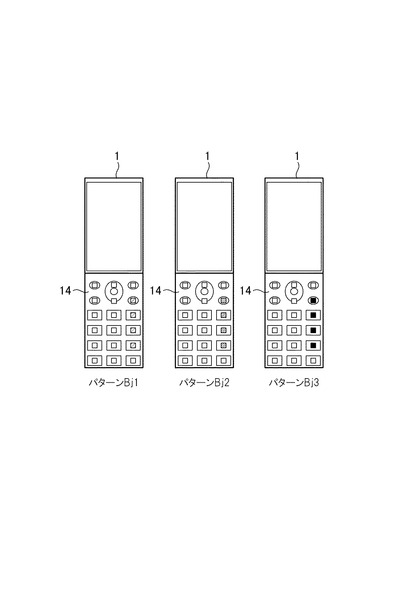
また、障害物が本装置1の“右”にある場合は、“パターンBjn”が用いられる。“パターンBjn”では、図2を参照すると、操作部14の右端側に位置するキー141−17、141−9、141−10、141−11における振動素子1411−18、1411−9、1411−10、1411−11が同時に振動する。
【0043】
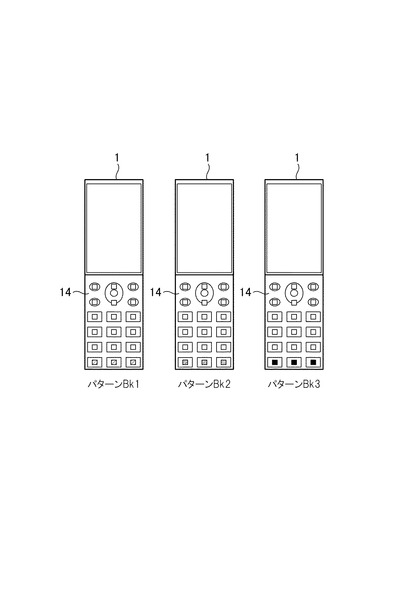
また、障害物が本装置1の“後”にある場合は、“パターンBkn”が用いられる。“パターンBkn”では、図2を参照すると、操作部14の下端側に位置するキー141−4、141−8、141−12における振動素子1411−4、1411−8、1411−12が同時に振動する。
【0044】
“パターンBhn”、“パターンBin”、“パターンBjn”、“パターンBkn”のそれぞれにおいて、振動素子1411の振動の強さは障害物までの距離に応じて変化する。最も遠い場合には最小の強さで振動し、近くなるに従って徐々に強くなって、最も近い場合には最大の強さで振動する。
【0045】
図7は、“パターンBh1”、“パターンBh2”、“パターンBh3”による振動状態を示す図である。“パターンBh1”→“パターンBh2”→“パターンBh3”の順で振動が強くなる。
【0046】
図8は、“パターンBi1”、“パターンBi2”、“パターンBi3”による振動状態を示す図である。“パターンBi1”→“パターンBi2”→“パターンBi3”の順で振動が強くなる。
【0047】
図9は、“パターンBj1”、“パターンBj2”、“パターンBj3”による振動状態を示す図である。“パターンBj1”→“パターンBj2”→“パターンBj3”の順で振動が強くなる。
【0048】
図10は、“パターンBk1”、“パターンBk2”、“パターンBk3”による振動状態を示す図である。“パターンBk1”→“パターンBk2”→“パターンBk3”の順で振動が強くなる。
【0049】
図3のフローチャートに戻り、演算部132が、ステップS207−h1で、振動パターン記憶部19から“パターンBh1”を読み出して操作部14の振動部1410に与えるとともに、今求めた距離も操作部14の振動部1410に与えることで、振動部1410は、操作部14の上端側に位置するキー141−13、141−15、141−16における振動素子1411−13、1411−15、1411−17を最小の強さで同時に振動させる。そして、ステップS207−h1の処理を終えると、ステップS201に戻る。
【0050】
また、ステップS205の判定において、障害物の方向が“前”で、障害物までの距離Yが距離bh2未満且つbh3以上(bh2>Y≧bh3)であれば、演算部132は、振動パターン記憶部19から“パターンBh2”を読み出して操作部14の振動部1410に与えるとともに、今求めた距離も操作部14の振動部1410に与える(ステップS207−h2)。これにより、振動部1410は、操作部14の上端側に位置するキー141−13、141−15、141−16における振動素子1411−13、1411−15、1411−17を“パターンBh1”の場合よりも強めに振動させる。そして、ステップS207−h2の処理を終えると、ステップS201に戻る。
【0051】
上記同様に、bh3>Y≧bh4、bh4>Y≧bh5、…、bhn−2>Y≧bhn−1の範囲内で障害物までの距離Yに該当するパターン(“パターンBh3”〜“パターンBhn−2”のうちのいずれか1つ)が決まり、そのパターンと距離Yに応じた強さでキー141−13、141−15、141−16における振動素子1411−13、1411−15、1411−17を同時に振動させる。
【0052】
そして、ステップS205の判定において、障害物の方向が“前”で、障害物までの距離Yが距離bhn−1未満且つbhn以上(bhn−1>Y≧bhn)であれば、演算部132は、振動パターン記憶部19から“パターンBhn”を読み出して操作部14の振動部1410に与えるとともに、今求めた距離も操作部14の振動部1410に与える(ステップS207−hn)。これにより、振動部1410は、操作部14の上端側に位置するキー141−13、141−15、141−16における振動素子1411−13、1411−15、1411−17を最大の強さで振動させる。そして、ステップS207−hnの処理を終えると、ステップS201に戻る。
【0053】
以上は障害物の方向が“前”の場合であったが、障害物の方向が“左”、“右”、“後”のいずれの場合においても、パターンが異なるものの、“前”の場合と同様の処理が行われる。
【0054】
一方、上記ステップS203の判定において、次のガイドのポイントまでの距離Xがan以下(an≧X)の場合、すなわち次のガイドのポイントに最も近い場合は、演算部132は、経路指示を行う(ステップS208)。演算部132は、右折を指示する場合、振動パターン記憶部19から“右折パターン”を読み出して操作部14の振動部1410に与える(ステップS209)。
【0055】
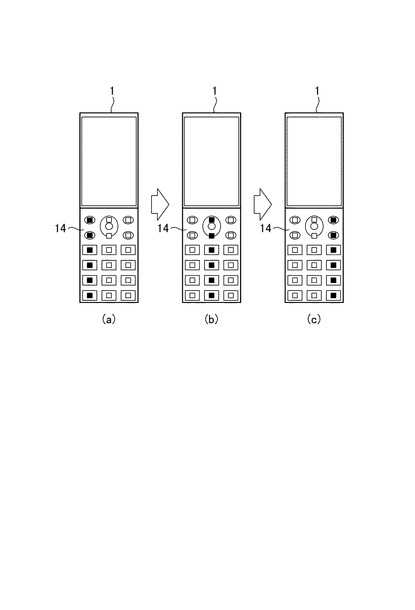
図11は、“右折パターン”による振動状態を示す図である。“右折パターン”は、(a)に示すパターン、(b)に示すパターン、(c)に示すパターンの3種類のパターンからなり、これらのパターンに基づく振動が順次行われる。
【0056】
図11の(a)に示すパターンでは、図2を参照すると、キー141−13〜141−14、141−1〜141−4における振動素子1411−13〜1411−14、1411−1〜1411−4が同時に振動する。
【0057】
また、図11の(b)に示すパターンでは、図2を参照すると、キー141−15、141−5〜141−8における振動素子1411−15〜1411−16、1411−5〜1411−8が同時に振動する。
【0058】
また、図11の(c)に示すパターンでは、図2を参照すると、キー141−16〜141−17、141−9〜141−12における振動素子1411−16〜1411−17、1411−9〜1411−12が同時に振動する。
【0059】
また、演算部132は、左折を指示する場合、振動パターン記憶部19から“左折パターン”を読み出して操作部14の振動部1410に与える(ステップS210)。
【0060】
図12は、“左折パターン”による振動状態を示す図である。“左折パターン”は、(a)に示すパターン、(b)に示すパターン、(c)に示すパターンの3種類のパターンからなり、これらのパターンに基づく振動が順次行われる。
【0061】
図12の(a)に示すパターンでは、図2を参照すると、キー141−16〜141−17、141−9〜141−12における振動素子1411−17〜1411−18、1411−9〜1411−12が同時に振動する。
【0062】
また、図12の(b)に示すパターンでは、図2を参照すると、キー141−15、141−5〜141−8における振動素子1411−15〜1411−16、1411−5〜1411−8が同時に振動する。
【0063】
また、図12の(c)に示すパターンでは、図2を参照すると、キー141−13〜141−14、141−1〜141−4における振動素子1411−13〜1411−14、1411−1〜1411−4が同時に振動する。
【0064】
また、演算部132は、直進を指示する場合、振動パターン記憶部19から“直進パターン”を読み出して操作部14の振動部1410に与える(ステップS211)。
【0065】
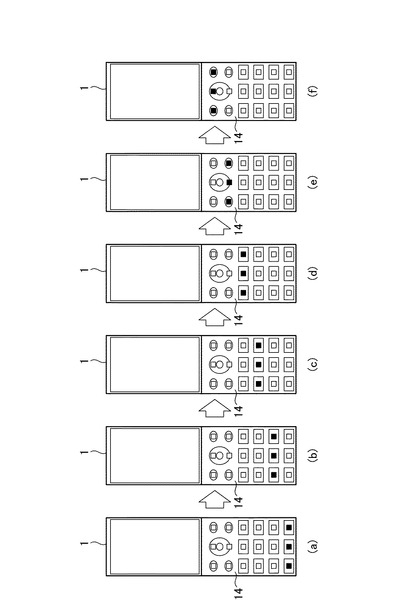
図13は、“直進パターン”による振動状態を示す図である。“直進パターン”は、(a)〜(f)に示す6種類のパターンからなり、これらのパターンに基づく振動が順次行われる。
【0066】
図13の(a)に示すパターンでは、図2を参照すると、キー141−4、141−8、141−12における振動素子1411−4、1411−8、1411−12が同時に振動する。
【0067】
また、図13の(b)に示すパターンでは、図2を参照すると、キー141−3、141−7、141−11における振動素子1411−3、1411−7、1411−11が同時に振動する。
【0068】
また、図13の(c)に示すパターンでは、図2を参照すると、キー141−2、141−6、141−10における振動素子1411−2、1411−6、1411−10が同時に振動する。
【0069】
また、図13の(d)に示すパターンでは、図2を参照すると、キー141−1、141−5、141−9における振動素子1411−1、1411−5、1411−9が同時に振動する。
【0070】
また、図13の(e)に示すパターンでは、図2を参照すると、キー141−14、141−15、141−17における振動素子1411−14、1411−16、1411−18が同時に振動する。
【0071】
また、図13の(f)に示すパターンでは、図2を参照すると、キー141−13、141−15、141−16における振動素子1411−13、1411−15、1411−17が同時に振動する。
【0072】
図3のフローチャートに戻り、演算部132は、経路指示の処理を行った後、現在位置が目的地かどうか判定する(ステップS212)。この場合、演算部132は、位置情報取得部11で取得した位置情報と地図情報取得部131で取得した地図情報に基づいて目的地かどうか判定する。目的地でなければステップS201に戻り、目的地であれば、振動パターン記憶部19から“到着パターン”を読み出して操作部14の振動部1410に与える(ステップS213)。
【0073】
図14は、“到着パターン”による振動状態を示す図である。“到着パターン”では、図2を参照すると、キー141−2、141−3、141−5、141−8、141−10、141−11における振動素子1411−2、1411−3、1411−5、1411−8、1411−10、1411−11が同時に振動する。この振動で略“○(まる)”字が表される。ユーザは手の平を操作部14に当てることで“○”を感じとることができ、目的地に到着したことを把握できる。演算部132は、ステップS213の処理を終えると、本処理を終える。
【0074】
このように本実施の形態に係る携帯端末装置1によれば、GPSシステムから位置情報を取得する位置情報取得部11と、本装置1の向きを検出する方向センサ部17と、地図情報を取得する地図情報取得部131と、位置情報取得部11で取得した位置情報と、方向センサ部17で検出した本装置1の向きと、地図情報取得部131で取得した地図情報とに基づいて、本装置1の進行方向の前、右、左又は後の向きに存在する障害物を検出する演算部132と、本装置1の操作部14に設けた複数の振動素子1411と、複数の振動素子1411のうち、演算部132で検出した障害物の向きに対応する振動素子1411を振動させる振動部1410と、を備えるので、ユーザは、振動素子1411の振動を感じとることで、進行方向の前、右、左又は後の向きに存在する障害物を正しく把握することができ、安全な歩行を行うことができる。
【0075】
(実施の形態2)
図15は、本発明の実施の形態2に係る携帯端末装置の概略構成を示すブロック図である。また、図16は、図15の携帯端末装置を示す正面図である。本実施の形態の携帯端末装置2は、前述した実施の形態1の携帯端末装置1と同様の振動による障害物報知に加え、光による障害物報知ができるものである。光による障害物報知を可能とするために、振動パターンと同じパターンの点灯パターンを記憶した点灯パターン記憶部20と、点灯パターン記憶部20に記憶された点灯パターンに対応する点灯素子1421を点灯させる点灯部1420とを有している。点灯部1420は、操作部14Aに設けられる。点灯素子1421は、振動素子1411と同様に、操作部14Aの複数のキーのそれぞれに対応して設けられる。点灯素子1421は、例えば発光ダイオードである。
【0076】
操作部14Aの点灯部1420は、演算部132から与えられた点灯パターンに対応する点灯素子1421を点灯させるとともに、当該点灯素子1421を障害物までの距離に対応する強度で点灯させる。この場合、点灯部1420は、振動部1410の動作と同様に、演算部132が携帯端末装置2の進行方向の右前又は左前の向きに存在する障害物を検出した場合、該障害物が進行方向を基準として所定の角度範囲内(例えば、斜め45度)に存在するとき、前の点灯素子1421のみを点灯させる。このように、進行方向を基準として所定の角度範囲内は前方向として規定することで、前の点灯素子1421と左又は右の点灯素子1421が同時に点灯することがなく、ユーザに誤った判断をさせてしまうことがない。
【0077】
このように本実施の形態に係る携帯端末装置2によれば、振動素子1411に加えて、複数の点灯素子1421を有し、これらの点灯素子1421のうち、検出した障害物の向きに対応するものを点灯させて、ユーザに、進行方向の前、右又は左の向きに存在する障害物を報知するので、歩行時におけるユーザの安全をサポートすることができる。
【産業上の利用可能性】
【0078】
本発明は、ユーザに対し、進行方向の前、右又は左の向きに存在する障害物を報知することができるといった効果を有し、携帯電話やPDA等の携帯端末装置への適用が可能である。
【符号の説明】
【0079】
1、2 携帯端末装置
11 位置情報取得部
13 中央処理部
14、14A 操作部
15 通信制御部
16 表示部
17 方向センサ部
18 地図情報記憶部
19 振動パターン記憶部
20 点灯パターン記憶部
30 GPS衛星
40 サーバ
50 無線通信ネットワーク
111 位置情報受信部
112 位置情報解析部
131 地図情報取得部
132 演算部
141 キー
1410 振動部
1411 振動素子
1420 点灯部
1421 点灯素子
【技術分野】
【0001】
本発明は、携帯電話やPDA(Personal Digital Assistant)等の携帯端末装置に関し、特にナビゲーション機能を備えた携帯端末装置に関する。
【背景技術】
【0002】
歩行者の進行する経路を振動によってナビゲーションする歩行者ナビゲーション装置が知られている。例えば、特許文献1には、単一の振動部から様々な振動パターンの振動を発生させて進行方向を報知することが記載されている。また、特許文献2には、バイブレータをユーザの左右の足に取り付けて、ユーザを基準とした進行方向が右の場合には、右足に取り付けたバイブレータを振動させて、ユーザに次の経路が右であることを報知することが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】国際公開第2004/092679号パンフレット
【特許文献2】特開2003−083762号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した特許文献1及び2は、ユーザに進行方向を報知するのみであって、進行方向の前、右又は左の向きに存在する障害物を報知することはできないという課題がある。
【0005】
本発明は、係る事情に鑑みてなされたものであり、ユーザに、進行方向の前、右又は左の向きに存在する障害物を報知することができる携帯端末装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の携帯端末装置は、障害物を報知する携帯端末装置であって、SPSシステムから位置情報を取得する位置情報取得部と、当該携帯端末装置の向きを検出する方向センサ部と、地図情報を取得する地図情報取得部と、前記位置情報取得部で取得した位置情報と、前記方向センサ部で検出した当該携帯端末装置の向きと、前記地図情報取得部で取得した地図情報と、に基づいて、当該携帯端末装置の進行方向の前、右又は左の向きに存在する障害物を検出する演算部と、当該携帯端末装置の前、右及び左に振動素子を有し、前記前、右及び左の振動素子のうち、前記演算部で検出した障害物の向きに対応する振動素子を振動させる振動部と、を備える。
【0007】
上記構成によれば、携帯端末装置の前、右及び左に振動素子を有し、これらの振動素子のうち、検出した障害物の向きに対応するものを振動させて、ユーザに、進行方向の前、右又は左の向きに存在する障害物を報知するので、歩行時におけるユーザの安全をサポートすることができる。
【0008】
上記構成において、前記演算部は、前記位置情報取得部で取得した位置情報と、前記方向センサ部で検出した当該携帯端末装置の向きと、前記地図情報取得部で取得した地図情報と、に基づいて、当該携帯端末装置の進行方向の前、右又は左の向きに存在する障害物までの距離を算出し、前記振動部は、前記前、右及び左の振動素子のうち、前記演算部で検出した障害物の向きに対応する振動素子を、前記演算部で算出した障害物までの距離に対応する強度で振動させる。
【0009】
上記構成によれば、障害物の向きに対応する振動素子を、その障害物までの距離に対応する強度で振動させるので、ユーザは、障害物が存在する方向のみならず、その障害物までの距離を把握することができる。
【0010】
上記構成において、前記地図情報取得部は、無線通信ネットワークを介して、地図情報を取得する。
【0011】
上記構成によれば、常に最新の地図情報を取得できるので、新たな障害物を逃すことなく検出することが可能となる。
【0012】
上記構成において、地図情報を記憶する地図情報記憶部を備え、前記地図情報取得部は、前記地図情報記憶部から地図情報を取得する。
【0013】
上記構成によれば、地図情報記憶部を備えることで、地図情報が必要なときに直ぐに取得することができるので、処理速度の向上が図れる。
【0014】
上記構成において、前記演算部が当該携帯端末装置の進行方向の右前又は左前の向きに存在する障害物を検出した場合、前記障害物が前記進行方向を基準として所定の角度範囲内(例えば、斜め45度)に存在するとき、前記振動部は前記前の振動素子のみを振動させる。
【0015】
上記構成によれば、進行方向を基準として所定の角度範囲内は前方向として規定できるので、前の振動素子と左又は右の振動素子が同時に動作することがなく、ユーザに誤った判断をさせてしまうことがない。
【0016】
上記構成において、当該携帯端末装置の前、右及び左に点灯素子を有し、前記前、右及び左の点灯素子のうち、前記演算部で検出した障害物の向きに対応する点灯素子を点灯させる点灯部を備える。
【0017】
上記構成によれば、振動素子に加えて、携帯端末装置の前、右及び左に点灯素子を有し、これらの点灯素子のうち、検出した障害物の向きに対応するものを点灯させて、ユーザに、進行方向の前、右又は左の向きに存在する障害物を報知するので、歩行時におけるユーザの安全をサポートすることができる。
【発明の効果】
【0018】
本発明によれば、ユーザに対し、進行方向の前、右又は左の向きに存在する障害物を報知することができ、歩行時におけるユーザの安全をサポートすることができる。
【図面の簡単な説明】
【0019】
【図1】本発明の実施の形態1に係る携帯端末装置の概略構成を示すブロック図
【図2】図1の携帯端末装置を示す正面図
【図3】図1の携帯端末装置の動作を説明するためのフローチャート
【図4】図1の携帯端末装置が有する“ルート外パターン”による振動状態を示す図
【図5】図1の携帯端末装置が有する“ガイドポイントまでの距離を報知するためのパターン”による振動状態を示す図
【図6】図1の携帯端末装置が有する障害物の方向を報知するためのパターンを示す図
【図7】図1の携帯端末装置が有する“障害物の方向(前)を報知するためのパターン”による振動状態を示す図
【図8】図1の携帯端末装置が有する“障害物の方向(左)を報知するためのパターン”による振動状態を示す図
【図9】図1の携帯端末装置が有する“障害物の方向(右)を報知するためのパターン”による振動状態を示す図
【図10】図1の携帯端末装置が有する“障害物の方向(後)を報知するためのパターン”による振動状態を示す図
【図11】図1の携帯端末装置が有する“右折パターン”による振動状態を示す図
【図12】図1の携帯端末装置が有する“左折パターン”による振動状態を示す図
【図13】図1の携帯端末装置が有する“直進パターン”による振動状態を示す図
【図14】図1の携帯端末装置が有する“到着パターン”による振動状態を示す図
【図15】本発明の実施の形態2に係る携帯端末装置の概略構成を示すブロック図
【図16】図15の携帯端末装置を示す正面図
【発明を実施するための形態】
【0020】
以下、本発明を実施するための好適な実施の形態について、図面を参照して詳細に説明する。
【0021】
(実施の形態1)
図1は、本発明の実施の形態1に係る携帯端末装置の概略構成を示すブロック図である。同図において、本実施の形態の携帯端末装置1は、歩行ナビゲーション機能を備えたものであり、位置情報取得部11と、中央処理部13と、操作部14と、通信制御部15と、表示部16と、方向センサ部17と、地図情報記憶部18と、振動パターン記憶部19とを備える。
【0022】
位置情報取得部11は、位置情報受信部111及び位置情報解析部112を備え、位置情報受信部111は、SPS(Satellite Positioning System)であるGPS(Global Positioning System)衛星30から送信された軌道情報を受信し、位置情報解析部112は、位置情報受信部111で受信した軌道情報を解析して位置情報を取得する。操作部14は、ダイヤルキー、発信/受信キー、電源/終了キー、センターキー、カーソルキーなどの複数のキーと、複数のキーのそれぞれに対応して設けられた振動素子と、各振動素子を動作させる振動部1410とを備えている。
【0023】
図2は、本実施の形態の携帯端末装置1を示す正面図である。同図に示すように、操作部14は、装置本体の中央部より下側に設けられている。また、複数個のキー141のそれぞれと重なるようにして振動素子1411が設けられている。振動部1410は、中央処理部13の演算部132(詳細は後述する)から与えられるパターンに対応する振動素子1411を振動させる。振動素子1411は、例えば小型モータである。
【0024】
通信制御部15は、TCP/IP(Transmission Control Protocol/Internet Protocol)などの通信プロトコルを使用して無線通信ネットワーク50と双方向通信を行う。無線通信ネットワーク50には地図情報の配信が可能なサーバ40が接続されている。表示部16は、液晶表示器や有機EL表示器(Organic Electroluminescence Display)等の表示器を備え、携帯端末装置1の使用における各種表示を行う。表示部16は、図2に示すように、装置本体の中央部より上側に設けられている。方向センサ部17は、磁気センサ、加速度センサ又は角速度センサ等を有し、携帯端末装置1の向きを検出する。地図情報記憶部18は、地図情報を記憶する。振動パターン記憶部19は、携帯端末装置1の前、右及び左の方向を振動でユーザに通知するためのパターンを記憶する。
【0025】
中央処理部13は、地図情報を取得する地図情報取得部131及び演算部132を備えている。地図情報取得部131は、地図情報記憶部18に記憶されている地図情報を取得する。また、地図情報取得部131は、通信制御部15を使用して無線通信ネットワーク50にアクセスし、無線通信ネットワーク50に接続されているサーバ40から地図情報を取得する。サーバ40から地図情報を取得した場合は、取得した地図情報を地図情報記憶部18に記憶させる。無線通信ネットワーク50を介して、地図情報を取得できるようにすることで、常に最新の地図データを得ることができ、新たな障害物を逃すことなく検出することが可能となる。また、地図情報記憶部18を有することで、地図情報が必要なときに直ぐに取得することができ、障害物の検出にかかる速度を向上できる。
【0026】
演算部132は、位置情報取得部11で取得した位置情報と、方向センサ部17で検出した携帯端末装置1の向きと、地図情報取得部131で取得した地図情報とに基づいて、携帯端末装置1の進行方向の前、右又は左の向きに存在する障害物を検出する。また、演算部132は、位置情報取得部11で取得した位置情報と、方向センサ部17で検出した携帯端末装置1の向きと、地図情報取得部131で取得した地図情報とに基づいて、携帯端末装置1の進行方向の前、右又は左の向きに存在する障害物までの距離を算出する。また、演算部132は、障害物を検出するとともに、該障害物までの距離を算出した場合に、検出した障害物の向きに対応する振動素子1411を振動させるためのパターンを振動パターン記憶部19から読み出して操作部14の振動部1410に与えるとともに、障害物までの距離を与える。
【0027】
操作部14の振動部1410は、演算部132から与えられたパターンに対応する振動素子1411を振動させるとともに、当該振動素子1411を障害物までの距離に対応する強度で振動させる。この場合、振動部1410は、演算部132が携帯端末装置1の進行方向の右前又は左前の向きに存在する障害物を検出した場合、該障害物が進行方向を基準として所定の角度範囲内(例えば、斜め45度)に存在するとき、前の振動素子1411のみを振動させる。このように、進行方向を基準として所定の角度範囲内は前方向として規定することで、前の振動素子1411と左又は右の振動素子1411が同時に動作することがなく、ユーザに誤った判断をさせてしまうことがない。
【0028】
次に、本実施の形態の携帯端末装置1の動作を説明する。
図3は、本実施の形態の携帯端末装置1の動作を説明するためのフローチャートである。また、図4、図5、図7〜図14は、本実施の形態の携帯端末装置1が有する振動パターンを説明するための図である。以下、動作の説明において図4、図5、図7〜図14に示す振動パターンを参照することとする。
【0029】
図3において、まず演算部132は、位置情報取得部11で取得した位置情報と地図情報取得部131で取得した地図情報に基づいて路上かどうか判定する(ステップS201)。路上でなければ、振動パターン記憶部19から“ルート外パターン”を読み出して操作部14の振動部1410に与える(ステップS202)。
【0030】
図4は、“ルート外パターン”による振動状態を示す図である。“ルート外パターン”は図2を参照すると、キー141−1、141−4、141−6、141−7、141−9、141−12における振動素子1411−1、1411−4、1411−6、1411−7、1411−9、1411−12が同時に振動する。この振動で略“×(ばつ)”字が表される。ユーザは手の平を操作部14に当てることで“×”を感じとることができ、ルートから外れたことを把握できる。
【0031】
演算部132は、ステップS201の判定で路上と判断すると、次のガイドのポイントまでの距離を判定する(ステップS203)。この場合、演算部132は、位置情報取得部11で取得した位置情報と地図情報取得部131で取得した地図情報に基づいて次のガイドのポイントまでの距離を求める。この判定において、次のガイドのポイントまでの距離Xが距離a1以上(X≧a1)であれば、演算部132は、振動パターン記憶部19から“パターンA1”を読み出して操作部14の振動部1410に与えるとともに、今求めた距離も操作部14の振動部1410に与える(ステップS204−1)。
【0032】
図5の(a)は、“パターンA1”による振動状態を示す図である。図2を参照すると、“パターンA1”では、全てのキー141−1〜141−17における振動素子1411−1〜1411−18が同時に振動する。このとき、次のガイドのポイントまでの距離が本処理で判断する距離のなかで一番遠いことから、振動素子1411−1〜1411−18を最小の強さで振動させる。
【0033】
また、図3のステップS203の判定において、次のガイドのポイントまでの距離Xが距離a1以下且つa2以上(a1≧X≧a2)であれば、演算部132は、振動パターン記憶部19から“パターンA2”を読み出して操作部14の振動部1410に与えるとともに、今求めた距離も操作部14の振動部1410に与える(ステップS204−2)。
【0034】
図5の(b)は、“パターンA2”による振動状態を示す図である。“パターンA2”では、上述した“パターンA1”と同様に、全てのキー141−1〜141−17における振動素子1411−1〜1411−18が同時に振動する。このとき、次のガイドのポイントまでの距離が本処理で判断する距離のなかで2番目に遠いことから、振動素子1411−1〜1411−18を“パターンA1”の場合よりも強めに振動させる。
【0035】
また、図3のステップS203の判定において、次のガイドのポイントまでの距離Xが距離a2以下且つa3以上(a2≧X≧a3)であれば、演算部132は、振動パターン記憶部19から“パターンA3”を読み出して操作部14の振動部1410に与えるとともに、今求めた距離も操作部14の振動部1410に与える(このステップは図示してない)。
【0036】
図5の(c)は、“パターンA3”による振動状態を示す図である。“パターンA3”では、上述した“パターンA1”と同様に、全てのキー141−1〜141−17における振動素子1411−1〜1411−18が同時に振動する。このとき、次のガイドのポイントまでの距離が本処理で判断する距離のなかで3番目に遠いことから、振動素子1411−1〜1411−18を“パターンA2”の場合よりも強めに振動させる。
【0037】
上記同様に、a3≧X≧a4、a4≧X≧a5、…、an−2≧X≧an−1の範囲内で、次のガイドのポイントまでの距離Xに該当するパターン(パターンA4〜パターンAn−1のうちのいずれか1つ)が決まり、そのパターンと距離Xに応じた強さで全てのキー141−1〜141−17における振動素子1411−1〜1411−18を同時に振動させる。
【0038】
そして、図3のステップS203の判定において、次のガイドのポイントまでの距離Xが距離an−1以下且つan以上(an−1≧X≧an)であれば、演算部132は、振動パターン記憶部19から“パターンAn”を読み出して操作部14の振動部1410に与えるとともに、今求めた距離も操作部14の振動部1410に与える(ステップS204−n)。
【0039】
次いで、演算部132は、障害物の方向(“前”、“左”、“右”、“後”)及び該障害物までの距離Yを判定する(ステップS205)。この場合、演算部132は、位置情報取得部11で取得した位置情報と地図情報取得部131で取得した地図情報に基づいて障害物までの距離を求める。また、演算部132は、方向センサ部17が検出した本装置1の向きから障害物の方向も判定する。これらの判定において、障害物の方向が“前”で(ステップS206−1)、障害物までの距離Yが距離bh1未満且つbh2以上(bh1>Y≧bh2)であれば、演算部132は、振動パターン記憶部19から“パターンBh1”を読み出して操作部14の振動部1410に与えるとともに、今求めた距離も操作部14の振動部1410に与える(ステップS207−h1)。
【0040】
図6は、障害物の方向を報知するためのパターンを示す図である。同図において、障害物が本装置1の“前”にある場合は、“パターンBhn”が用いられる。この“パターンBhn”では、図2を参照すると、操作部14の上端側に位置するキー141−13、141−15、141−16における振動素子1411−13、1411−15、1411−17が同時に振動する。
【0041】
また、障害物が本装置1の“左”にある場合は、“パターンBin”が用いられる。“パターンBin”では、図2を参照すると、操作部14の左端側に位置するキー141−14、141−1、141−2、141−3における振動素子1411−14、1411−1、1411−2、1411−3が同時に振動する。
【0042】
また、障害物が本装置1の“右”にある場合は、“パターンBjn”が用いられる。“パターンBjn”では、図2を参照すると、操作部14の右端側に位置するキー141−17、141−9、141−10、141−11における振動素子1411−18、1411−9、1411−10、1411−11が同時に振動する。
【0043】
また、障害物が本装置1の“後”にある場合は、“パターンBkn”が用いられる。“パターンBkn”では、図2を参照すると、操作部14の下端側に位置するキー141−4、141−8、141−12における振動素子1411−4、1411−8、1411−12が同時に振動する。
【0044】
“パターンBhn”、“パターンBin”、“パターンBjn”、“パターンBkn”のそれぞれにおいて、振動素子1411の振動の強さは障害物までの距離に応じて変化する。最も遠い場合には最小の強さで振動し、近くなるに従って徐々に強くなって、最も近い場合には最大の強さで振動する。
【0045】
図7は、“パターンBh1”、“パターンBh2”、“パターンBh3”による振動状態を示す図である。“パターンBh1”→“パターンBh2”→“パターンBh3”の順で振動が強くなる。
【0046】
図8は、“パターンBi1”、“パターンBi2”、“パターンBi3”による振動状態を示す図である。“パターンBi1”→“パターンBi2”→“パターンBi3”の順で振動が強くなる。
【0047】
図9は、“パターンBj1”、“パターンBj2”、“パターンBj3”による振動状態を示す図である。“パターンBj1”→“パターンBj2”→“パターンBj3”の順で振動が強くなる。
【0048】
図10は、“パターンBk1”、“パターンBk2”、“パターンBk3”による振動状態を示す図である。“パターンBk1”→“パターンBk2”→“パターンBk3”の順で振動が強くなる。
【0049】
図3のフローチャートに戻り、演算部132が、ステップS207−h1で、振動パターン記憶部19から“パターンBh1”を読み出して操作部14の振動部1410に与えるとともに、今求めた距離も操作部14の振動部1410に与えることで、振動部1410は、操作部14の上端側に位置するキー141−13、141−15、141−16における振動素子1411−13、1411−15、1411−17を最小の強さで同時に振動させる。そして、ステップS207−h1の処理を終えると、ステップS201に戻る。
【0050】
また、ステップS205の判定において、障害物の方向が“前”で、障害物までの距離Yが距離bh2未満且つbh3以上(bh2>Y≧bh3)であれば、演算部132は、振動パターン記憶部19から“パターンBh2”を読み出して操作部14の振動部1410に与えるとともに、今求めた距離も操作部14の振動部1410に与える(ステップS207−h2)。これにより、振動部1410は、操作部14の上端側に位置するキー141−13、141−15、141−16における振動素子1411−13、1411−15、1411−17を“パターンBh1”の場合よりも強めに振動させる。そして、ステップS207−h2の処理を終えると、ステップS201に戻る。
【0051】
上記同様に、bh3>Y≧bh4、bh4>Y≧bh5、…、bhn−2>Y≧bhn−1の範囲内で障害物までの距離Yに該当するパターン(“パターンBh3”〜“パターンBhn−2”のうちのいずれか1つ)が決まり、そのパターンと距離Yに応じた強さでキー141−13、141−15、141−16における振動素子1411−13、1411−15、1411−17を同時に振動させる。
【0052】
そして、ステップS205の判定において、障害物の方向が“前”で、障害物までの距離Yが距離bhn−1未満且つbhn以上(bhn−1>Y≧bhn)であれば、演算部132は、振動パターン記憶部19から“パターンBhn”を読み出して操作部14の振動部1410に与えるとともに、今求めた距離も操作部14の振動部1410に与える(ステップS207−hn)。これにより、振動部1410は、操作部14の上端側に位置するキー141−13、141−15、141−16における振動素子1411−13、1411−15、1411−17を最大の強さで振動させる。そして、ステップS207−hnの処理を終えると、ステップS201に戻る。
【0053】
以上は障害物の方向が“前”の場合であったが、障害物の方向が“左”、“右”、“後”のいずれの場合においても、パターンが異なるものの、“前”の場合と同様の処理が行われる。
【0054】
一方、上記ステップS203の判定において、次のガイドのポイントまでの距離Xがan以下(an≧X)の場合、すなわち次のガイドのポイントに最も近い場合は、演算部132は、経路指示を行う(ステップS208)。演算部132は、右折を指示する場合、振動パターン記憶部19から“右折パターン”を読み出して操作部14の振動部1410に与える(ステップS209)。
【0055】
図11は、“右折パターン”による振動状態を示す図である。“右折パターン”は、(a)に示すパターン、(b)に示すパターン、(c)に示すパターンの3種類のパターンからなり、これらのパターンに基づく振動が順次行われる。
【0056】
図11の(a)に示すパターンでは、図2を参照すると、キー141−13〜141−14、141−1〜141−4における振動素子1411−13〜1411−14、1411−1〜1411−4が同時に振動する。
【0057】
また、図11の(b)に示すパターンでは、図2を参照すると、キー141−15、141−5〜141−8における振動素子1411−15〜1411−16、1411−5〜1411−8が同時に振動する。
【0058】
また、図11の(c)に示すパターンでは、図2を参照すると、キー141−16〜141−17、141−9〜141−12における振動素子1411−16〜1411−17、1411−9〜1411−12が同時に振動する。
【0059】
また、演算部132は、左折を指示する場合、振動パターン記憶部19から“左折パターン”を読み出して操作部14の振動部1410に与える(ステップS210)。
【0060】
図12は、“左折パターン”による振動状態を示す図である。“左折パターン”は、(a)に示すパターン、(b)に示すパターン、(c)に示すパターンの3種類のパターンからなり、これらのパターンに基づく振動が順次行われる。
【0061】
図12の(a)に示すパターンでは、図2を参照すると、キー141−16〜141−17、141−9〜141−12における振動素子1411−17〜1411−18、1411−9〜1411−12が同時に振動する。
【0062】
また、図12の(b)に示すパターンでは、図2を参照すると、キー141−15、141−5〜141−8における振動素子1411−15〜1411−16、1411−5〜1411−8が同時に振動する。
【0063】
また、図12の(c)に示すパターンでは、図2を参照すると、キー141−13〜141−14、141−1〜141−4における振動素子1411−13〜1411−14、1411−1〜1411−4が同時に振動する。
【0064】
また、演算部132は、直進を指示する場合、振動パターン記憶部19から“直進パターン”を読み出して操作部14の振動部1410に与える(ステップS211)。
【0065】
図13は、“直進パターン”による振動状態を示す図である。“直進パターン”は、(a)〜(f)に示す6種類のパターンからなり、これらのパターンに基づく振動が順次行われる。
【0066】
図13の(a)に示すパターンでは、図2を参照すると、キー141−4、141−8、141−12における振動素子1411−4、1411−8、1411−12が同時に振動する。
【0067】
また、図13の(b)に示すパターンでは、図2を参照すると、キー141−3、141−7、141−11における振動素子1411−3、1411−7、1411−11が同時に振動する。
【0068】
また、図13の(c)に示すパターンでは、図2を参照すると、キー141−2、141−6、141−10における振動素子1411−2、1411−6、1411−10が同時に振動する。
【0069】
また、図13の(d)に示すパターンでは、図2を参照すると、キー141−1、141−5、141−9における振動素子1411−1、1411−5、1411−9が同時に振動する。
【0070】
また、図13の(e)に示すパターンでは、図2を参照すると、キー141−14、141−15、141−17における振動素子1411−14、1411−16、1411−18が同時に振動する。
【0071】
また、図13の(f)に示すパターンでは、図2を参照すると、キー141−13、141−15、141−16における振動素子1411−13、1411−15、1411−17が同時に振動する。
【0072】
図3のフローチャートに戻り、演算部132は、経路指示の処理を行った後、現在位置が目的地かどうか判定する(ステップS212)。この場合、演算部132は、位置情報取得部11で取得した位置情報と地図情報取得部131で取得した地図情報に基づいて目的地かどうか判定する。目的地でなければステップS201に戻り、目的地であれば、振動パターン記憶部19から“到着パターン”を読み出して操作部14の振動部1410に与える(ステップS213)。
【0073】
図14は、“到着パターン”による振動状態を示す図である。“到着パターン”では、図2を参照すると、キー141−2、141−3、141−5、141−8、141−10、141−11における振動素子1411−2、1411−3、1411−5、1411−8、1411−10、1411−11が同時に振動する。この振動で略“○(まる)”字が表される。ユーザは手の平を操作部14に当てることで“○”を感じとることができ、目的地に到着したことを把握できる。演算部132は、ステップS213の処理を終えると、本処理を終える。
【0074】
このように本実施の形態に係る携帯端末装置1によれば、GPSシステムから位置情報を取得する位置情報取得部11と、本装置1の向きを検出する方向センサ部17と、地図情報を取得する地図情報取得部131と、位置情報取得部11で取得した位置情報と、方向センサ部17で検出した本装置1の向きと、地図情報取得部131で取得した地図情報とに基づいて、本装置1の進行方向の前、右、左又は後の向きに存在する障害物を検出する演算部132と、本装置1の操作部14に設けた複数の振動素子1411と、複数の振動素子1411のうち、演算部132で検出した障害物の向きに対応する振動素子1411を振動させる振動部1410と、を備えるので、ユーザは、振動素子1411の振動を感じとることで、進行方向の前、右、左又は後の向きに存在する障害物を正しく把握することができ、安全な歩行を行うことができる。
【0075】
(実施の形態2)
図15は、本発明の実施の形態2に係る携帯端末装置の概略構成を示すブロック図である。また、図16は、図15の携帯端末装置を示す正面図である。本実施の形態の携帯端末装置2は、前述した実施の形態1の携帯端末装置1と同様の振動による障害物報知に加え、光による障害物報知ができるものである。光による障害物報知を可能とするために、振動パターンと同じパターンの点灯パターンを記憶した点灯パターン記憶部20と、点灯パターン記憶部20に記憶された点灯パターンに対応する点灯素子1421を点灯させる点灯部1420とを有している。点灯部1420は、操作部14Aに設けられる。点灯素子1421は、振動素子1411と同様に、操作部14Aの複数のキーのそれぞれに対応して設けられる。点灯素子1421は、例えば発光ダイオードである。
【0076】
操作部14Aの点灯部1420は、演算部132から与えられた点灯パターンに対応する点灯素子1421を点灯させるとともに、当該点灯素子1421を障害物までの距離に対応する強度で点灯させる。この場合、点灯部1420は、振動部1410の動作と同様に、演算部132が携帯端末装置2の進行方向の右前又は左前の向きに存在する障害物を検出した場合、該障害物が進行方向を基準として所定の角度範囲内(例えば、斜め45度)に存在するとき、前の点灯素子1421のみを点灯させる。このように、進行方向を基準として所定の角度範囲内は前方向として規定することで、前の点灯素子1421と左又は右の点灯素子1421が同時に点灯することがなく、ユーザに誤った判断をさせてしまうことがない。
【0077】
このように本実施の形態に係る携帯端末装置2によれば、振動素子1411に加えて、複数の点灯素子1421を有し、これらの点灯素子1421のうち、検出した障害物の向きに対応するものを点灯させて、ユーザに、進行方向の前、右又は左の向きに存在する障害物を報知するので、歩行時におけるユーザの安全をサポートすることができる。
【産業上の利用可能性】
【0078】
本発明は、ユーザに対し、進行方向の前、右又は左の向きに存在する障害物を報知することができるといった効果を有し、携帯電話やPDA等の携帯端末装置への適用が可能である。
【符号の説明】
【0079】
1、2 携帯端末装置
11 位置情報取得部
13 中央処理部
14、14A 操作部
15 通信制御部
16 表示部
17 方向センサ部
18 地図情報記憶部
19 振動パターン記憶部
20 点灯パターン記憶部
30 GPS衛星
40 サーバ
50 無線通信ネットワーク
111 位置情報受信部
112 位置情報解析部
131 地図情報取得部
132 演算部
141 キー
1410 振動部
1411 振動素子
1420 点灯部
1421 点灯素子
【特許請求の範囲】
【請求項1】
障害物を報知する携帯端末装置であって、
SPSシステムから位置情報を取得する位置情報取得部と、
当該携帯端末装置の向きを検出する方向センサ部と、
地図情報を取得する地図情報取得部と、
前記位置情報取得部で取得した位置情報と、前記方向センサ部で検出した当該携帯端末装置の向きと、前記地図情報取得部で取得した地図情報と、に基づいて、当該携帯端末装置の進行方向の前、右又は左の向きに存在する障害物を検出する演算部と、
当該携帯端末装置の前、右及び左に振動素子を有し、前記前、右及び左の振動素子のうち、前記演算部で検出した障害物の向きに対応する振動素子を振動させる振動部と、
を備える携帯端末装置。
【請求項2】
前記演算部は、前記位置情報取得部で取得した位置情報と、前記方向センサ部で検出した当該携帯端末装置の向きと、前記地図情報取得部で取得した地図情報と、に基づいて、当該携帯端末装置の進行方向の前、右又は左の向きに存在する障害物までの距離を算出し、
前記振動部は、前記前、右及び左の振動素子のうち、前記演算部で検出した障害物の向きに対応する振動素子を、前記演算部で算出した障害物までの距離に対応する強度で振動させる請求項1に記載の携帯端末装置。
【請求項3】
前記地図情報取得部は、無線通信ネットワークを介して、地図情報を取得する請求項1又は請求項2に記載の携帯端末装置。
【請求項4】
地図情報を記憶する地図情報記憶部を備え、
前記地図情報取得部は、前記地図情報記憶部から地図情報を取得する請求項1又は請求項2に記載の携帯端末装置。
【請求項5】
前記演算部が当該携帯端末装置の進行方向の右前又は左前の向きに存在する障害物を検出した場合、前記障害物が前記進行方向を基準として所定の角度範囲内に存在するとき、前記振動部は前記前の振動素子のみを振動させる請求項1乃至請求項4のいずれか一項に記載の携帯端末装置。
【請求項6】
当該携帯端末装置の前、右及び左に点灯素子を有し、前記前、右及び左の点灯素子のうち、前記演算部で検出した障害物の向きに対応する点灯素子を点灯させる点灯部を備える請求項1に記載の携帯端末装置。
【請求項1】
障害物を報知する携帯端末装置であって、
SPSシステムから位置情報を取得する位置情報取得部と、
当該携帯端末装置の向きを検出する方向センサ部と、
地図情報を取得する地図情報取得部と、
前記位置情報取得部で取得した位置情報と、前記方向センサ部で検出した当該携帯端末装置の向きと、前記地図情報取得部で取得した地図情報と、に基づいて、当該携帯端末装置の進行方向の前、右又は左の向きに存在する障害物を検出する演算部と、
当該携帯端末装置の前、右及び左に振動素子を有し、前記前、右及び左の振動素子のうち、前記演算部で検出した障害物の向きに対応する振動素子を振動させる振動部と、
を備える携帯端末装置。
【請求項2】
前記演算部は、前記位置情報取得部で取得した位置情報と、前記方向センサ部で検出した当該携帯端末装置の向きと、前記地図情報取得部で取得した地図情報と、に基づいて、当該携帯端末装置の進行方向の前、右又は左の向きに存在する障害物までの距離を算出し、
前記振動部は、前記前、右及び左の振動素子のうち、前記演算部で検出した障害物の向きに対応する振動素子を、前記演算部で算出した障害物までの距離に対応する強度で振動させる請求項1に記載の携帯端末装置。
【請求項3】
前記地図情報取得部は、無線通信ネットワークを介して、地図情報を取得する請求項1又は請求項2に記載の携帯端末装置。
【請求項4】
地図情報を記憶する地図情報記憶部を備え、
前記地図情報取得部は、前記地図情報記憶部から地図情報を取得する請求項1又は請求項2に記載の携帯端末装置。
【請求項5】
前記演算部が当該携帯端末装置の進行方向の右前又は左前の向きに存在する障害物を検出した場合、前記障害物が前記進行方向を基準として所定の角度範囲内に存在するとき、前記振動部は前記前の振動素子のみを振動させる請求項1乃至請求項4のいずれか一項に記載の携帯端末装置。
【請求項6】
当該携帯端末装置の前、右及び左に点灯素子を有し、前記前、右及び左の点灯素子のうち、前記演算部で検出した障害物の向きに対応する点灯素子を点灯させる点灯部を備える請求項1に記載の携帯端末装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】

【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2011−259162(P2011−259162A)
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願番号】特願2010−131239(P2010−131239)
【出願日】平成22年6月8日(2010.6.8)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願日】平成22年6月8日(2010.6.8)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]