
携帯電子機器の状態を追跡する方法
本発明は、携帯電子機器の状態を追跡する方法と、前記方法を実行するように構成される処理装置を備える携帯電子機器とに関する。携帯電子機器の状態を追跡する方法であって、(i)前記携帯電子機器の前記状態を、複数のセルを含む格子を用いて表すことであって、前記セルの各々は、1つ以上の状態変数により規定される状態空間における領域を表すと共に、前記携帯電子機器の前記状態が状態空間におけるその領域内にある確率値を有し、前記格子は、既定の閾値を超える確率値を有するセルのみを含むように境界付けられることと、(ii)1つ以上の状態変数の値を示す測定信号を入手することと、(iii)前記格子の前記確率値を更新し、前記格子を再び境界付けることとを、反復的に実行することを含む方法が提供される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、携帯電子機器の状態を追跡する方法と、その方法を実行するように構成される処理装置を備える携帯電子機器とに関する。
【発明の背景】
【0002】
パーソナルな測位における課題の1つとして、測定源の数が少なく、測定源が大きな誤差を含むものである可能性があり、測定源の分布も適当ではない状況、具体的には屋内または市街地において、正確な位置情報を提供することが挙げられる。この課題を解決するには、これらの複数の測定源の融合から生じる非線形フィルタ方程式をうまく数値解析しなければならない。この場合、測定毎に最大量の情報を抽出することが有利である。
【0003】
GPSなどの衛星ベースのシステムの動作は、屋内において高感度モードで使用されても予測不可能である。セルラーネットワーク、WLAN、またはブルートゥースなどのローカル無線ネットワークにより、ある程度の測位能力がもたらされるが、GPSに比べて精度が劣る。携帯電子機器のその他の可能な部品として、加速度計、気圧計、またはデジタルコンパスなどの搭載センサが挙げられる。
【0004】
種々の測定源を組み合わせることは、異なる誤差特性、予想不可能な歪み、測定における定誤差、強い非線形性、複雑な時間依存性、およびデータの欠落により、困難である。一般的な方法で全事例をモデル化することは容易ではなく、また、モデルを正確に解くことは容易でないことは言うまでもない。正確なモデルを使用しても、一般的なカルマンフィルタおよびその非線形拡張は、突然失敗する可能性がある。
【発明の摘要】
【0005】
本発明の第1の側面によると、携帯電子機器の状態を追跡する方法であって、
(i)携帯電子機器の状態を、複数のセルを含む格子(グリッド:grid)を用いて表すことであって、セルの各々が、1つ以上の状態変数により規定される状態空間における領域を表すと共に、携帯電子機器の状態が状態空間におけるその領域内にある確率値を有し、格子は、既定の閾値を超える確率値を有するセルのみを含むように境界付けられることと、
(ii)1つ以上の状態変数の値を示す測定信号を入手することと、
(iii)測定信号に基づいて格子の確率値を更新すること、および格子を再び境界付けること、
を、反復的に実行することを含む方法が提供される。
【0006】
携帯電子機器の状態は、位置、速度、加速度、時計誤差を、単独でまたは組み合わせて含むがそれだけに限定されない状態変数を含んでもよい。
【0007】
状態空間の次元の数は、状態変数の次元の総数に相当し、各セルは、状態空間の数に等しい次元の数を含む。例えば、状態空間およびセルは、3次元における位置および3次元における速度を表すために6次元であってもよい。
【0008】
本発明は、全情報が、位置の解を一意にはもたらさない、または多数の解をもたらす測定ジオメトリから保持され、かつ事後分布の形状が、そのいかなるピークも降下させずに保持される手段を提供する。
【0009】
本発明は、粒子フィルタ(particle filter)よりも高速に実行され、位置指紋方法(location fingerprint method)よりも一般的であり、完全な位置分布を伝搬させることから、不確定または多数解決のシステムを正確に表すことができる。
【0010】
格子は、本方法の計算負荷に関する問題を緩和するために、一様な間隔を有する平行6面体格子であることが好ましい。
【0011】
反復されるステップ(i)のうち1回以上は、測定信号を入手することと、測定信号に基づいて格子を形成することを含んでもよい。位置推定は、例えば、領域、領域差、または平面測定のうちのいずれかを含む測定信号から導かれてもよい。領域測定は、セルラー基地局、WLANまたはブルートゥース送受信機、および/または音響センサから得られてもよく、例えば、時間遅延、往復(round-trip)、または信号強度測定の形式であってもよい。位置を示すその他の種類の測定信号には、到来角測定、最大最小領域窓、基地セクター情報、ならびに搭載気圧計およびデジタルコンパスが含まれるが、それだけに限定されない。速度は、デルタレンジおよび方位測定を使用して測定可能である。加速度は、オンボードの加速度計を使用して測定可能である。
【0012】
測定信号の詳細は、本発明にとって重要でないことが理解されたい。但し、該当する1つまたは複数の状態変数の1つまたは複数の値は、単独での使用またはその他の測定信号と併用する使用か否かに関わらず、測定信号を使用して入手または推定可能である。
【0013】
反復されるステップ(i)のうち2回目以降の1回以上は、先に反復されたステップ(iii)において更新された格子を使用することを含んでもよい。
【0014】
1回以上のステップ(i)は、(iv)更新された格子と、携帯電子機器の移動モデルとに基づいて、後続の反復における格子の確率値を予測して、予測格子を入手すること、を含んでもよい。
【0015】
ステップ(iv)は、後続の反復におけるステップ(i)において、格子を再び境界付けること、および/または予測格子を使用することを含んでもよい。
【0016】
格子を再び境界付けることは、既定の閾値未満の確率値を有するセルを除外するように格子の境界を移動すること、および/または既定の閾値を超える確率値を有するセルを含むように境界を移動すること、を含んでもよい。場合により、セルは、境界外に存在するが、その確率値はゼロである。いかなる過程の後であっても、そのようなセルの確率値が増加する場合に、境界は、既定の閾値を超える確率値を有するいかなるそのようなセルも含むように移動される。場合により、セルは、境界外には存在しない。確率値の変更をもたらすいかなる過程の後であっても、本発明は、境界外の暫定セルを規定することと、これらのセルの確率値を計算することと、既定の閾値を超える確率値を有するいかなるこのようなセルも含むように境界を移動すること、を含んでもよい。
【0017】
移動モデルは、方法の計算負荷に関する問題を緩和するために、線形であることが好ましい。
【0018】
反復的な実行の1回又はそれ以上において、更新された格子に基づいて、携帯電子機器の状態に関する期待値および分散を計算すること(v)を含んでもよい。
【0019】
本発明の第2の側面によると、本発明の第1の側面の方法を実行するように構成される処理装置を備える携帯電子機器が提供される。
【0020】
また、本発明は、上記の方法を実行するように構成されるコンピュータプログラムと、本発明の携帯電子機器が動作するシステムとを含む。本発明は、組み合わせが具体的に言及(または請求)されているか否かに関わらず、種々の組み合わせによるその1つ以上の側面および実施形態を包含する。
【発明の詳細な説明】
【0021】
本発明をより容易に理解するために、添付の図面を参照して、ほんの一例として以下に説明される。以下の図面において、同一の数字は、その特徴が属する実施形態に関わらず、同一の特徴を言及している。
【0022】
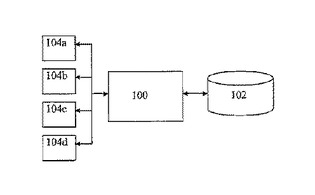
図6は、本発明に従う携帯電子機器の一部に関する概略図である。携帯電子機器は、メモリ102と、複数の送受信機モジュール104a〜dと通信するプロセッサ100とを備える。メモリ102は、後述する本発明の方法を実行するためのソフトウェアコード部分を含む。送受信機モジュール104a〜dは、GPSシステム、セルラー基地局、WLAN送信機、およびブルートゥース送信機からそれぞれ測定信号を受信することができる。送受信機モジュール104a〜dは、便宜上このように言及されるが、実際は、モジュール104a〜dによっては、送信する能力を含まないものもあれば、測定信号を受信するために送信することを要求されるものもあってもよい。
【0023】
本発明の方法について、以下の用語を使用して説明していく。

〔ステップ(i)〕
【0024】
本ステップにおいて、複数のセルを含む格子を使用して、携帯電子機器の状態xkを示す。各セルは、状態空間における領域を示し、携帯電子機器の状態xkがその領域内にある確率値を有する。
【0025】
例えば、状態xkは、3次元状態変数の位置rkやvkを含んでもよい。すなわち
である。次に、各セルは、状態空間の6次元領域を表すために6次元である。しかしながら、説明目的のために、図1から図5は、状態xkが2次元位置rkを含む簡単な例を示す。
【0026】
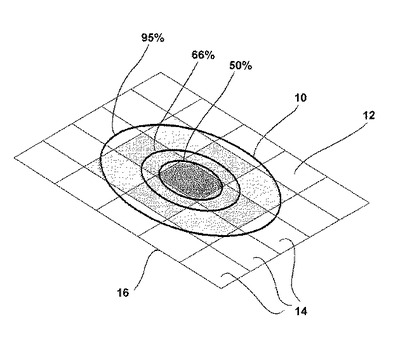
図1は、95%、66%、および50%の信頼領域を有する携帯電子機器の位置に関する事前分布(prior distribution )10を示す。事前分布10は、(i)以前に繰り返し実行した本方法から得られる事後分布(posterior distribution)、(ii)携帯電子機器の移動を予測するために、移動モデルを使用して事後分布を変更することによって得られる予測事前分布、および(iii)送受信機モジュール104a〜dのいずれかを介して得られる測定信号、のいくつかのソースのうちの1つから導かれてもよい。上記ソースのいくつかが利用可能である場合、組み合わせて使用可能である。
【0027】
事前分布10は、サイズおよび形状が均一である多数の2次元セル14を含む事前格子12を使用して近似化される。各セル14は、地球表面における領域を表し、携帯電子機器がその領域内に位置する事前確率値を有する。
【0028】
図1は、説明目的のためだけに、格子12における信頼領域により示される事前分布10を示すことを理解されたい。事前分布10は連続的であるように図1に示されるが、事前格子12の確率値により近似化される形式でのみ携帯電子機器のメモリ102に存在する。図1のセル14の相対的陰影は、確率値を表し、つまり、セル14の陰影が濃くなるほど、セル14の確率値が高くなることを示す。
【0029】
事前格子12は境界16を含み、その境界内の全てのセル14が既定の閾値を超える事前確率値を有する。重要な領域Sを表すべく、事前分布の格子近似が、境界16によって定められる。領域Sは、
の中で(単純に結合された)領域であり、その中の事前確率値は無視できない。
【0030】
図1の例では、事前分布の99%が事前格子12に含まれるように閾値を設定した。しかしながら、閾値レベルは、設計上の選択の問題であることを理解されたい。閾値を低くすると、境界16内に含まれるセル14が増加するため、計算負荷の増加を伴うが、近似の精度が増す。反対に、閾値を高くすると、境界内に含まれるセル14が減少するため、近似の精度は低下するが、計算負荷は減少する。
【0031】
境界16内のセル14だけが、携帯電子機器のメモリ102に書き込まれる。変形例において、メモリ102は、境界外のセルをも書き込んでもよいが、これらの事前確率値はゼロに設定される。いずれの場合においても、事前分布10の事前格子12により、近似領域は、計算し易くするように境界16によって範囲が定められる。
【0032】
事前格子12におけるセル14の数は、設計上の選択の問題であり、計算負荷と精度をバランスさせねばならない。極端な選択すると、多数の小さいセルを生成することになる。この場合、本発明に従うセル14の中心の密度値に相当する密度値のみを使用する既知の点質量フィルタ(point-mass filter)の場合のように、近似表現は、確率値が準最適であったとしても正確なものに近づく。別の極端な選択をすると、少数の大きなセル14を使用することになる。従って、事前確率値を可能な限り正確に計算することは有利である。事前分布10の構造の多くは、大きいセル14で近似される場合に失われる。セル14は、事前分布10の最も微細な特徴よりもさらに小さくはすべきではない。
【0033】
本ステップにおいて、時間インデックスkは、k=1に設定される。
〔ステップ(ii)〕
【0034】
このステップにおいて、1つ以上の状態変数の値を示す送受信機モジュール104a〜dを介して測定信号を入手する。
【0035】
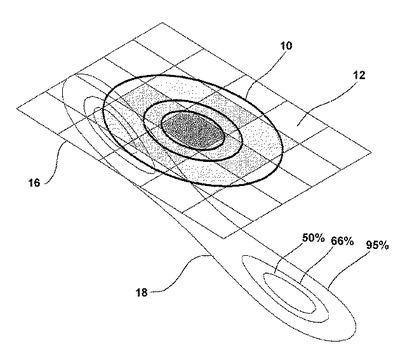
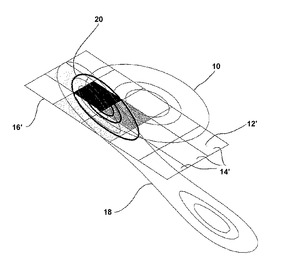
図2は、送受信機モジュール104a〜dを介して得られる測定信号に基づき、携帯電子機器の推定位置を示す測定位置を示す測定尤度関数(measurement likelihood function)18を示す。図示されるように、測定尤度関数は、95%、66%、および50%信頼領域を含む。
【0036】
図3は、事前分布10と同様の要領で、事前格子12を使用して近似化される測定尤度関数18を示す。図3において、携帯電子機器がそれぞれのセル14によって表される領域内に位置する確率を再び表す確率値は、測定尤度関数18のみに基づく。
【0037】
図3において、測定尤度関数18は、事前分布10と同一の事前格子12を使用して近似化されるが、異なるサイズ、形状、および/または配向の格子を使用して測定尤度関数を表してもよいことを理解されたい。しかしながら、これにより、さらなる計算が必要になり得る。
【0038】
測定信号には、位置推定を入手するための、例えば、領域、領域差、または平面測定のうちのいずれかが含まれてもよい。
【0039】
真の位置をrと仮定して、位置sにおける局までの領域測定は、
として記述可能である。関連する測定誤差νは、正規である必要はなく、現状に一致する経験的に決定される分布によって示される。
【0040】
GPSシステムから得られる、バイアスが含まれる領域測定は、領域差として処理される。局のうちの1つが基準局として選択され、それに対する全ての差が計算される。基準局がs0にある場合、領域差測定は、
となる。
【0041】
最後に、平面測定は、
である。ここでuは単位ベクトルである。
【0042】
このステップ中、利用可能な全ての測定はベクトルykに格納され、対応する測定式は、ベクトル関数hk(x)に格納される。個の
【0043】
例として、領域差測定がnd回、領域測定がnr回、および平面測定がnp回の場合を考える。測定ベクトルは、
であり、測定モデルは、
である。
【0044】
全ての測定誤差が正規分布を有する場合、測定尤度関数18は、
であり、ここでΣは測定誤差νの共分散行列である。
〔ステップ(iii)〕
【0045】
本ステップにおいて、測定信号に基づいて事前格子12の事前確率値を更新することによって事後格子12'を生成し、事後格子12'の境界を再定義する。
【0046】
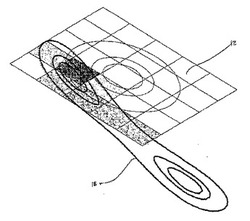
図4は、事前分布10および測定尤度関数18から導かれた事後分布20を示す。事後分布20は、セル14'を有する事後格子12'によって表され、各セル14'は、事後分布20を近似化するために、事後確率値を有する。
【0047】
事後格子12'の事後確率値は、各セル14における事前確率値を、上の尤度関数をセル14に亘って積分することによって求められる、セル14の全尤度で乗算することによって求められる。
ここで
である。
【0048】
事後格子12'は、既定の閾値を超える確率値を有するセル14'のみを含むように新たな境界16'で再び境界付けられる。前境界16内のセル14が既定の閾値未満の事後確率値を有する場合、新しい境界16'は、そのようなセル14を除外するように配置される。
〔ステップ(iv)〕
【0049】
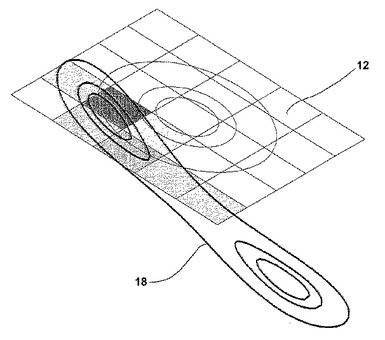
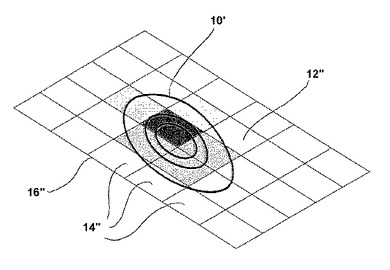
本ステップはオプションである。本ステップにおいて、セル14"を有する予測格子12"は、現在の試行における事後格子12'および携帯電子機器の移動モデルに基づいて得られる。予測格子12"は、後続の試行における事前格子12を形成する。
【0050】
図5は、移動モデル適用後の予測事前分布10'を示す。この移動モデルは、一定速度正規分布加速度モデル(constant-velocity-normally-distributed-acceleration model)またはシンガーモデル(singer model)などの、適切な任意のモデルである。予測事前分布10'は、本方法の後続の試行における事前分布10を形成する。
【0051】
セル14"の予測事前確率値は、以下の式に従って、そのセル14"への移行に関する確率によって重み付けされた現在の試行における全確率値を総和することによって求められる。予測事前分布10'は、全確率値の計算後に正規化される。
【0052】
各セル14"の体積を
で示すことによって、予測事前確率値
は、セル14"上の予測pdfを積分することによって計算される。
【0053】
をその格子近似に置き換えると、
となり、ここで
は、(k-1)番目の格子のj番目のセルからk番目の格子i番目のセルへの移行確率である。
【0054】
計算の効率を上げるために、例えば
などの線形移動モデルを使用する。予測格子12"は、移動モデルを事後格子12'に適用することによって形成される。旧格子のi番目のセルと、新格子のj番目のセルとの間の移行確率は、差(i - j)にのみ依存し、
と記述可能である。予測事前確率値は、
となり、これにより、d次元の離散線形畳み込みの計算が速くなる。
【0055】
次に、移行確率
は、
となり、ここで
である。これは、
と簡略化することが可能である。
【0056】
ここで
は、修正された過程雑音(process noise)確率密度関数の省略表現である。具体的には、
である場合、
となる。
【0057】
積分は、ハイパーボックスにおける単なる多正規確率であり、数値的に計算可能である。
【0058】
wkが非ガウス型である場合、移行確率
は、累積分布を使用して計算可能である。
【0059】
移動モデルの適用後、既定の閾値を超える予測確率値を有する、前境界16'内外の全セル14"を含む境界16"になるように境界16'を移動する。
【0060】
セル14"が前境界16'外に存在し、かつ事前および事後確率値がゼロであった場合、新境界16"は、既定の閾値を超える予測確率値を有するこれらのセル14"のいずれも含むように配置される。
【0061】
前境界16'外にセルが存在しなかった変形例において、既存のセル14'のものと対応するサイズ、形状、および幾何学的配置を有する新しいセル14"が加えられ、新境界16"は、新しいセル14"を含むように配置される。新しいセル14"のサイズ、形状、および/または幾何学的配置は、既存の予測格子12"のものと一致する必要はないことを理解されたい。このような存在しないセルの確率値が、既定の閾値を上回るか否かに関しては、前境界16'外の多数の暫定セル14"を規定することによって、ならびに暫定セル14"の予測確率値を計算することによって、容易に判断可能である。このような暫定セル14"は、継続的に規定され、その確率値は、確率値が閾値未満である暫定セル14"のシェルを生成する点に達するまで計算される。次に、新境界16"は、閾値を超える確率値を有する暫定セル14"を全て含むように配置される。
〔ステップ(v)〕
【0062】
本ステップにおいて、携帯電子機器の状態に関する期待値および分散を、以下の数式に従って、予測格子12"に基づき計算する。
【0063】
最終的に、時間インデックスkは増分され、方法は、ステップ(i)から反復される。
【0064】
本発明は、格子−質量アプローチ(grid-mass approach)を使用して、携帯電子機器の状態を追跡する方法を実行することを理解されたい。
【図面の簡単な説明】
【0065】
【図1】本発明による方法の簡単な例を示す。
【図2】本発明による方法の簡単な例を示す。
【図3】本発明による方法の簡単な例を示す。
【図4】本発明による方法の簡単な例を示す。
【図5】本発明による方法の簡単な例を示す。
【図6】本発明に従う装置をしめる。
【技術分野】
【0001】
本発明は、携帯電子機器の状態を追跡する方法と、その方法を実行するように構成される処理装置を備える携帯電子機器とに関する。
【発明の背景】
【0002】
パーソナルな測位における課題の1つとして、測定源の数が少なく、測定源が大きな誤差を含むものである可能性があり、測定源の分布も適当ではない状況、具体的には屋内または市街地において、正確な位置情報を提供することが挙げられる。この課題を解決するには、これらの複数の測定源の融合から生じる非線形フィルタ方程式をうまく数値解析しなければならない。この場合、測定毎に最大量の情報を抽出することが有利である。
【0003】
GPSなどの衛星ベースのシステムの動作は、屋内において高感度モードで使用されても予測不可能である。セルラーネットワーク、WLAN、またはブルートゥースなどのローカル無線ネットワークにより、ある程度の測位能力がもたらされるが、GPSに比べて精度が劣る。携帯電子機器のその他の可能な部品として、加速度計、気圧計、またはデジタルコンパスなどの搭載センサが挙げられる。
【0004】
種々の測定源を組み合わせることは、異なる誤差特性、予想不可能な歪み、測定における定誤差、強い非線形性、複雑な時間依存性、およびデータの欠落により、困難である。一般的な方法で全事例をモデル化することは容易ではなく、また、モデルを正確に解くことは容易でないことは言うまでもない。正確なモデルを使用しても、一般的なカルマンフィルタおよびその非線形拡張は、突然失敗する可能性がある。
【発明の摘要】
【0005】
本発明の第1の側面によると、携帯電子機器の状態を追跡する方法であって、
(i)携帯電子機器の状態を、複数のセルを含む格子(グリッド:grid)を用いて表すことであって、セルの各々が、1つ以上の状態変数により規定される状態空間における領域を表すと共に、携帯電子機器の状態が状態空間におけるその領域内にある確率値を有し、格子は、既定の閾値を超える確率値を有するセルのみを含むように境界付けられることと、
(ii)1つ以上の状態変数の値を示す測定信号を入手することと、
(iii)測定信号に基づいて格子の確率値を更新すること、および格子を再び境界付けること、
を、反復的に実行することを含む方法が提供される。
【0006】
携帯電子機器の状態は、位置、速度、加速度、時計誤差を、単独でまたは組み合わせて含むがそれだけに限定されない状態変数を含んでもよい。
【0007】
状態空間の次元の数は、状態変数の次元の総数に相当し、各セルは、状態空間の数に等しい次元の数を含む。例えば、状態空間およびセルは、3次元における位置および3次元における速度を表すために6次元であってもよい。
【0008】
本発明は、全情報が、位置の解を一意にはもたらさない、または多数の解をもたらす測定ジオメトリから保持され、かつ事後分布の形状が、そのいかなるピークも降下させずに保持される手段を提供する。
【0009】
本発明は、粒子フィルタ(particle filter)よりも高速に実行され、位置指紋方法(location fingerprint method)よりも一般的であり、完全な位置分布を伝搬させることから、不確定または多数解決のシステムを正確に表すことができる。
【0010】
格子は、本方法の計算負荷に関する問題を緩和するために、一様な間隔を有する平行6面体格子であることが好ましい。
【0011】
反復されるステップ(i)のうち1回以上は、測定信号を入手することと、測定信号に基づいて格子を形成することを含んでもよい。位置推定は、例えば、領域、領域差、または平面測定のうちのいずれかを含む測定信号から導かれてもよい。領域測定は、セルラー基地局、WLANまたはブルートゥース送受信機、および/または音響センサから得られてもよく、例えば、時間遅延、往復(round-trip)、または信号強度測定の形式であってもよい。位置を示すその他の種類の測定信号には、到来角測定、最大最小領域窓、基地セクター情報、ならびに搭載気圧計およびデジタルコンパスが含まれるが、それだけに限定されない。速度は、デルタレンジおよび方位測定を使用して測定可能である。加速度は、オンボードの加速度計を使用して測定可能である。
【0012】
測定信号の詳細は、本発明にとって重要でないことが理解されたい。但し、該当する1つまたは複数の状態変数の1つまたは複数の値は、単独での使用またはその他の測定信号と併用する使用か否かに関わらず、測定信号を使用して入手または推定可能である。
【0013】
反復されるステップ(i)のうち2回目以降の1回以上は、先に反復されたステップ(iii)において更新された格子を使用することを含んでもよい。
【0014】
1回以上のステップ(i)は、(iv)更新された格子と、携帯電子機器の移動モデルとに基づいて、後続の反復における格子の確率値を予測して、予測格子を入手すること、を含んでもよい。
【0015】
ステップ(iv)は、後続の反復におけるステップ(i)において、格子を再び境界付けること、および/または予測格子を使用することを含んでもよい。
【0016】
格子を再び境界付けることは、既定の閾値未満の確率値を有するセルを除外するように格子の境界を移動すること、および/または既定の閾値を超える確率値を有するセルを含むように境界を移動すること、を含んでもよい。場合により、セルは、境界外に存在するが、その確率値はゼロである。いかなる過程の後であっても、そのようなセルの確率値が増加する場合に、境界は、既定の閾値を超える確率値を有するいかなるそのようなセルも含むように移動される。場合により、セルは、境界外には存在しない。確率値の変更をもたらすいかなる過程の後であっても、本発明は、境界外の暫定セルを規定することと、これらのセルの確率値を計算することと、既定の閾値を超える確率値を有するいかなるこのようなセルも含むように境界を移動すること、を含んでもよい。
【0017】
移動モデルは、方法の計算負荷に関する問題を緩和するために、線形であることが好ましい。
【0018】
反復的な実行の1回又はそれ以上において、更新された格子に基づいて、携帯電子機器の状態に関する期待値および分散を計算すること(v)を含んでもよい。
【0019】
本発明の第2の側面によると、本発明の第1の側面の方法を実行するように構成される処理装置を備える携帯電子機器が提供される。
【0020】
また、本発明は、上記の方法を実行するように構成されるコンピュータプログラムと、本発明の携帯電子機器が動作するシステムとを含む。本発明は、組み合わせが具体的に言及(または請求)されているか否かに関わらず、種々の組み合わせによるその1つ以上の側面および実施形態を包含する。
【発明の詳細な説明】
【0021】
本発明をより容易に理解するために、添付の図面を参照して、ほんの一例として以下に説明される。以下の図面において、同一の数字は、その特徴が属する実施形態に関わらず、同一の特徴を言及している。
【0022】
図6は、本発明に従う携帯電子機器の一部に関する概略図である。携帯電子機器は、メモリ102と、複数の送受信機モジュール104a〜dと通信するプロセッサ100とを備える。メモリ102は、後述する本発明の方法を実行するためのソフトウェアコード部分を含む。送受信機モジュール104a〜dは、GPSシステム、セルラー基地局、WLAN送信機、およびブルートゥース送信機からそれぞれ測定信号を受信することができる。送受信機モジュール104a〜dは、便宜上このように言及されるが、実際は、モジュール104a〜dによっては、送信する能力を含まないものもあれば、測定信号を受信するために送信することを要求されるものもあってもよい。
【0023】
本発明の方法について、以下の用語を使用して説明していく。
〔ステップ(i)〕
【0024】
本ステップにおいて、複数のセルを含む格子を使用して、携帯電子機器の状態xkを示す。各セルは、状態空間における領域を示し、携帯電子機器の状態xkがその領域内にある確率値を有する。
【0025】
例えば、状態xkは、3次元状態変数の位置rkやvkを含んでもよい。すなわち
である。次に、各セルは、状態空間の6次元領域を表すために6次元である。しかしながら、説明目的のために、図1から図5は、状態xkが2次元位置rkを含む簡単な例を示す。
【0026】
図1は、95%、66%、および50%の信頼領域を有する携帯電子機器の位置に関する事前分布(prior distribution )10を示す。事前分布10は、(i)以前に繰り返し実行した本方法から得られる事後分布(posterior distribution)、(ii)携帯電子機器の移動を予測するために、移動モデルを使用して事後分布を変更することによって得られる予測事前分布、および(iii)送受信機モジュール104a〜dのいずれかを介して得られる測定信号、のいくつかのソースのうちの1つから導かれてもよい。上記ソースのいくつかが利用可能である場合、組み合わせて使用可能である。
【0027】
事前分布10は、サイズおよび形状が均一である多数の2次元セル14を含む事前格子12を使用して近似化される。各セル14は、地球表面における領域を表し、携帯電子機器がその領域内に位置する事前確率値を有する。
【0028】
図1は、説明目的のためだけに、格子12における信頼領域により示される事前分布10を示すことを理解されたい。事前分布10は連続的であるように図1に示されるが、事前格子12の確率値により近似化される形式でのみ携帯電子機器のメモリ102に存在する。図1のセル14の相対的陰影は、確率値を表し、つまり、セル14の陰影が濃くなるほど、セル14の確率値が高くなることを示す。
【0029】
事前格子12は境界16を含み、その境界内の全てのセル14が既定の閾値を超える事前確率値を有する。重要な領域Sを表すべく、事前分布の格子近似が、境界16によって定められる。領域Sは、
の中で(単純に結合された)領域であり、その中の事前確率値は無視できない。
【0030】
図1の例では、事前分布の99%が事前格子12に含まれるように閾値を設定した。しかしながら、閾値レベルは、設計上の選択の問題であることを理解されたい。閾値を低くすると、境界16内に含まれるセル14が増加するため、計算負荷の増加を伴うが、近似の精度が増す。反対に、閾値を高くすると、境界内に含まれるセル14が減少するため、近似の精度は低下するが、計算負荷は減少する。
【0031】
境界16内のセル14だけが、携帯電子機器のメモリ102に書き込まれる。変形例において、メモリ102は、境界外のセルをも書き込んでもよいが、これらの事前確率値はゼロに設定される。いずれの場合においても、事前分布10の事前格子12により、近似領域は、計算し易くするように境界16によって範囲が定められる。
【0032】
事前格子12におけるセル14の数は、設計上の選択の問題であり、計算負荷と精度をバランスさせねばならない。極端な選択すると、多数の小さいセルを生成することになる。この場合、本発明に従うセル14の中心の密度値に相当する密度値のみを使用する既知の点質量フィルタ(point-mass filter)の場合のように、近似表現は、確率値が準最適であったとしても正確なものに近づく。別の極端な選択をすると、少数の大きなセル14を使用することになる。従って、事前確率値を可能な限り正確に計算することは有利である。事前分布10の構造の多くは、大きいセル14で近似される場合に失われる。セル14は、事前分布10の最も微細な特徴よりもさらに小さくはすべきではない。
【0033】
本ステップにおいて、時間インデックスkは、k=1に設定される。
〔ステップ(ii)〕
【0034】
このステップにおいて、1つ以上の状態変数の値を示す送受信機モジュール104a〜dを介して測定信号を入手する。
【0035】
図2は、送受信機モジュール104a〜dを介して得られる測定信号に基づき、携帯電子機器の推定位置を示す測定位置を示す測定尤度関数(measurement likelihood function)18を示す。図示されるように、測定尤度関数は、95%、66%、および50%信頼領域を含む。
【0036】
図3は、事前分布10と同様の要領で、事前格子12を使用して近似化される測定尤度関数18を示す。図3において、携帯電子機器がそれぞれのセル14によって表される領域内に位置する確率を再び表す確率値は、測定尤度関数18のみに基づく。
【0037】
図3において、測定尤度関数18は、事前分布10と同一の事前格子12を使用して近似化されるが、異なるサイズ、形状、および/または配向の格子を使用して測定尤度関数を表してもよいことを理解されたい。しかしながら、これにより、さらなる計算が必要になり得る。
【0038】
測定信号には、位置推定を入手するための、例えば、領域、領域差、または平面測定のうちのいずれかが含まれてもよい。
【0039】
真の位置をrと仮定して、位置sにおける局までの領域測定は、
として記述可能である。関連する測定誤差νは、正規である必要はなく、現状に一致する経験的に決定される分布によって示される。
【0040】
GPSシステムから得られる、バイアスが含まれる領域測定は、領域差として処理される。局のうちの1つが基準局として選択され、それに対する全ての差が計算される。基準局がs0にある場合、領域差測定は、
となる。
【0041】
最後に、平面測定は、
である。ここでuは単位ベクトルである。
【0042】
このステップ中、利用可能な全ての測定はベクトルykに格納され、対応する測定式は、ベクトル関数hk(x)に格納される。個の
【0043】
例として、領域差測定がnd回、領域測定がnr回、および平面測定がnp回の場合を考える。測定ベクトルは、
であり、測定モデルは、
である。
【0044】
全ての測定誤差が正規分布を有する場合、測定尤度関数18は、
であり、ここでΣは測定誤差νの共分散行列である。
〔ステップ(iii)〕
【0045】
本ステップにおいて、測定信号に基づいて事前格子12の事前確率値を更新することによって事後格子12'を生成し、事後格子12'の境界を再定義する。
【0046】
図4は、事前分布10および測定尤度関数18から導かれた事後分布20を示す。事後分布20は、セル14'を有する事後格子12'によって表され、各セル14'は、事後分布20を近似化するために、事後確率値を有する。
【0047】
事後格子12'の事後確率値は、各セル14における事前確率値を、上の尤度関数をセル14に亘って積分することによって求められる、セル14の全尤度で乗算することによって求められる。
ここで
である。
【0048】
事後格子12'は、既定の閾値を超える確率値を有するセル14'のみを含むように新たな境界16'で再び境界付けられる。前境界16内のセル14が既定の閾値未満の事後確率値を有する場合、新しい境界16'は、そのようなセル14を除外するように配置される。
〔ステップ(iv)〕
【0049】
本ステップはオプションである。本ステップにおいて、セル14"を有する予測格子12"は、現在の試行における事後格子12'および携帯電子機器の移動モデルに基づいて得られる。予測格子12"は、後続の試行における事前格子12を形成する。
【0050】
図5は、移動モデル適用後の予測事前分布10'を示す。この移動モデルは、一定速度正規分布加速度モデル(constant-velocity-normally-distributed-acceleration model)またはシンガーモデル(singer model)などの、適切な任意のモデルである。予測事前分布10'は、本方法の後続の試行における事前分布10を形成する。
【0051】
セル14"の予測事前確率値は、以下の式に従って、そのセル14"への移行に関する確率によって重み付けされた現在の試行における全確率値を総和することによって求められる。予測事前分布10'は、全確率値の計算後に正規化される。
【0052】
各セル14"の体積を
で示すことによって、予測事前確率値
は、セル14"上の予測pdfを積分することによって計算される。
【0053】
をその格子近似に置き換えると、
となり、ここで
は、(k-1)番目の格子のj番目のセルからk番目の格子i番目のセルへの移行確率である。
【0054】
計算の効率を上げるために、例えば
などの線形移動モデルを使用する。予測格子12"は、移動モデルを事後格子12'に適用することによって形成される。旧格子のi番目のセルと、新格子のj番目のセルとの間の移行確率は、差(i - j)にのみ依存し、
と記述可能である。予測事前確率値は、
となり、これにより、d次元の離散線形畳み込みの計算が速くなる。
【0055】
次に、移行確率
は、
となり、ここで
である。これは、
と簡略化することが可能である。
【0056】
ここで
は、修正された過程雑音(process noise)確率密度関数の省略表現である。具体的には、
である場合、
となる。
【0057】
積分は、ハイパーボックスにおける単なる多正規確率であり、数値的に計算可能である。
【0058】
wkが非ガウス型である場合、移行確率
は、累積分布を使用して計算可能である。
【0059】
移動モデルの適用後、既定の閾値を超える予測確率値を有する、前境界16'内外の全セル14"を含む境界16"になるように境界16'を移動する。
【0060】
セル14"が前境界16'外に存在し、かつ事前および事後確率値がゼロであった場合、新境界16"は、既定の閾値を超える予測確率値を有するこれらのセル14"のいずれも含むように配置される。
【0061】
前境界16'外にセルが存在しなかった変形例において、既存のセル14'のものと対応するサイズ、形状、および幾何学的配置を有する新しいセル14"が加えられ、新境界16"は、新しいセル14"を含むように配置される。新しいセル14"のサイズ、形状、および/または幾何学的配置は、既存の予測格子12"のものと一致する必要はないことを理解されたい。このような存在しないセルの確率値が、既定の閾値を上回るか否かに関しては、前境界16'外の多数の暫定セル14"を規定することによって、ならびに暫定セル14"の予測確率値を計算することによって、容易に判断可能である。このような暫定セル14"は、継続的に規定され、その確率値は、確率値が閾値未満である暫定セル14"のシェルを生成する点に達するまで計算される。次に、新境界16"は、閾値を超える確率値を有する暫定セル14"を全て含むように配置される。
〔ステップ(v)〕
【0062】
本ステップにおいて、携帯電子機器の状態に関する期待値および分散を、以下の数式に従って、予測格子12"に基づき計算する。
【0063】
最終的に、時間インデックスkは増分され、方法は、ステップ(i)から反復される。
【0064】
本発明は、格子−質量アプローチ(grid-mass approach)を使用して、携帯電子機器の状態を追跡する方法を実行することを理解されたい。
【図面の簡単な説明】
【0065】
【図1】本発明による方法の簡単な例を示す。
【図2】本発明による方法の簡単な例を示す。
【図3】本発明による方法の簡単な例を示す。
【図4】本発明による方法の簡単な例を示す。
【図5】本発明による方法の簡単な例を示す。
【図6】本発明に従う装置をしめる。
【特許請求の範囲】
【請求項1】
携帯電子機器の状態を追跡する方法であって、
(i)前記携帯電子機器の前記状態を、複数のセルを含む格子を用いて表すことであって、前記セルの各々は、1つ以上の状態変数により規定される状態空間における領域を表すと共に、前記携帯電子機器の前記状態が状態空間におけるその領域内にある確率値を有し、前記格子は、既定の閾値を超える確率値を有するセルのみを含むように境界付けられることと、
(ii)1つ以上の状態変数の値を示す測定信号を入手することと、
(iii)前記測定信号に基づいて前記格子の前記確率値を更新し、前記格子を再び境界付けることと、
を反復的に実行することを含む、方法。
【請求項2】
前記格子は、一様な間隔を有する平行6面体格子である、請求項1に記載の方法。
【請求項3】
反復されるステップ(i)のうち1回以上は、測定信号を入手することと、前記測定信号に基づいて前記格子を形成することを含む、請求項1に記載の方法。
【請求項4】
反復されるステップ(i)のうち2回目以降の1回以上は、先に反復されたステップ(iii)において前記更新された格子を使用することを含む、請求項1に記載の方法。
【請求項5】
前記1回以上のステップ(i)は、
(iv)前記更新された格子と、前記携帯電子機器の移動モデルとに基づいて、後続の反復における前記格子の前記確率値を予測して、予測格子を入手すること、
を含む、請求項4に記載の方法。
【請求項6】
ステップ(iv)は、前記格子を再び境界付けることを含む、請求項5に記載の方法。
【請求項7】
後続の反復におけるステップ(i)において、前記予測格子を使用することを含む、請求項5に記載の方法。
【請求項8】
前記移動モデルは線形である、請求項5に記載の方法。
【請求項9】
前記反復的な実行の1回又はそれ以上において、
(v)前記更新された格子に基づいて、前記携帯電子機器の前記状態に関する期待値および分散を計算すること、
を含む、請求項1に記載の方法。
【請求項10】
請求項1に記載の方法を実行するように構成される処理装置を備える携帯電子機器。
【請求項11】
携帯電子機器の状態を追跡する際に使用するコンピュータプログラムであって、
(i)前記携帯電子機器の前記状態を、複数のセルを含む格子を用いて表すことであって、前記セルの各々は、1つ以上の状態変数により規定される状態空間における領域を表すと共に、前記携帯電子機器の前記状態が状態空間におけるその領域内にある確率値を有し、前記格子は、既定の閾値を超える確率値を有するセルのみを含むように境界付けられることと、
(ii)1つ以上の状態変数の値を示す測定信号を入手することと、
(iii)前記測定信号に基づいて前記格子の前記確率値を更新し、前記格子を再び境界付けること、
を、反復的に実行するように構成されるコンピュータコードを含む、コンピュータプログラム。
【請求項12】
請求項10に記載の携帯電子機器と、該携帯電子機器に測定信号を供給する装置とを備えるシステム。
【請求項1】
携帯電子機器の状態を追跡する方法であって、
(i)前記携帯電子機器の前記状態を、複数のセルを含む格子を用いて表すことであって、前記セルの各々は、1つ以上の状態変数により規定される状態空間における領域を表すと共に、前記携帯電子機器の前記状態が状態空間におけるその領域内にある確率値を有し、前記格子は、既定の閾値を超える確率値を有するセルのみを含むように境界付けられることと、
(ii)1つ以上の状態変数の値を示す測定信号を入手することと、
(iii)前記測定信号に基づいて前記格子の前記確率値を更新し、前記格子を再び境界付けることと、
を反復的に実行することを含む、方法。
【請求項2】
前記格子は、一様な間隔を有する平行6面体格子である、請求項1に記載の方法。
【請求項3】
反復されるステップ(i)のうち1回以上は、測定信号を入手することと、前記測定信号に基づいて前記格子を形成することを含む、請求項1に記載の方法。
【請求項4】
反復されるステップ(i)のうち2回目以降の1回以上は、先に反復されたステップ(iii)において前記更新された格子を使用することを含む、請求項1に記載の方法。
【請求項5】
前記1回以上のステップ(i)は、
(iv)前記更新された格子と、前記携帯電子機器の移動モデルとに基づいて、後続の反復における前記格子の前記確率値を予測して、予測格子を入手すること、
を含む、請求項4に記載の方法。
【請求項6】
ステップ(iv)は、前記格子を再び境界付けることを含む、請求項5に記載の方法。
【請求項7】
後続の反復におけるステップ(i)において、前記予測格子を使用することを含む、請求項5に記載の方法。
【請求項8】
前記移動モデルは線形である、請求項5に記載の方法。
【請求項9】
前記反復的な実行の1回又はそれ以上において、
(v)前記更新された格子に基づいて、前記携帯電子機器の前記状態に関する期待値および分散を計算すること、
を含む、請求項1に記載の方法。
【請求項10】
請求項1に記載の方法を実行するように構成される処理装置を備える携帯電子機器。
【請求項11】
携帯電子機器の状態を追跡する際に使用するコンピュータプログラムであって、
(i)前記携帯電子機器の前記状態を、複数のセルを含む格子を用いて表すことであって、前記セルの各々は、1つ以上の状態変数により規定される状態空間における領域を表すと共に、前記携帯電子機器の前記状態が状態空間におけるその領域内にある確率値を有し、前記格子は、既定の閾値を超える確率値を有するセルのみを含むように境界付けられることと、
(ii)1つ以上の状態変数の値を示す測定信号を入手することと、
(iii)前記測定信号に基づいて前記格子の前記確率値を更新し、前記格子を再び境界付けること、
を、反復的に実行するように構成されるコンピュータコードを含む、コンピュータプログラム。
【請求項12】
請求項10に記載の携帯電子機器と、該携帯電子機器に測定信号を供給する装置とを備えるシステム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公表番号】特表2009−529128(P2009−529128A)
【公表日】平成21年8月13日(2009.8.13)
【国際特許分類】
【出願番号】特願2008−557597(P2008−557597)
【出願日】平成18年3月7日(2006.3.7)
【国際出願番号】PCT/EP2006/002272
【国際公開番号】WO2007/101453
【国際公開日】平成19年9月13日(2007.9.13)
【出願人】(398012616)ノキア コーポレイション (1,359)
【Fターム(参考)】
【公表日】平成21年8月13日(2009.8.13)
【国際特許分類】
【出願日】平成18年3月7日(2006.3.7)
【国際出願番号】PCT/EP2006/002272
【国際公開番号】WO2007/101453
【国際公開日】平成19年9月13日(2007.9.13)
【出願人】(398012616)ノキア コーポレイション (1,359)
【Fターム(参考)】
[ Back to top ]