
携帯電子機器
【課題】より高い精度で他の通信端末の位置を特定することができる携帯電子機器を提供すること。
【解決手段】通信部で基準通信端末を介した通信または近距離通信部での通信により対象通信端末と当該基準通信端末との第1距離を算出し、通信部で基準通信端末と通信し、当該基準通信端末と自機との第2距離を算出し、近距離通信部での通信により対象通信端末と自機との第3距離を算出し、位置情報取得部で取得した位置情報と当該基準通信端末の位置情報に基づいて自機に対して当該基準通信端末がある方向を検出し、第1距離、第2距離および第3距離で形成される三角形あるいは当該三角形のすべての角部に接触する円のいずれか一方と、自機に対して当該基準通信端末がある方向と、に基づいて対象通信端末の位置を検出する予測位置算出処理を実行することで上記課題を解決する。
【解決手段】通信部で基準通信端末を介した通信または近距離通信部での通信により対象通信端末と当該基準通信端末との第1距離を算出し、通信部で基準通信端末と通信し、当該基準通信端末と自機との第2距離を算出し、近距離通信部での通信により対象通信端末と自機との第3距離を算出し、位置情報取得部で取得した位置情報と当該基準通信端末の位置情報に基づいて自機に対して当該基準通信端末がある方向を検出し、第1距離、第2距離および第3距離で形成される三角形あるいは当該三角形のすべての角部に接触する円のいずれか一方と、自機に対して当該基準通信端末がある方向と、に基づいて対象通信端末の位置を検出する予測位置算出処理を実行することで上記課題を解決する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、通信機能を備える携帯電子機器に関する。
【背景技術】
【0002】
近年、携帯電話機等の携帯電話端末には、種々の機能が搭載されている。例えば、特許文献1には、GPS衛星から出力される信号を用いて自身の位置を特定し、地図情報を取得し、経路案内を行うナビゲーション機能を備えている携帯電子機器が記載されている。また、特許文献2には、他の通信端末がGPS衛星から出力される信号を用いて取得した位置情報を通信機能で取得する携帯電子機器が記載されている。特許文献2に記載の携帯電子機器は、他の通信端末の位置情報を取得することで、他の通信端末の位置を特定することができ、他の通信端末を持っている人物を見つけることができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−345115号公報
【特許文献2】特開2003−227868号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献2に記載されているようにGPS衛星から出力されるGPS信号は電波の強度が微弱であるため、空が見えない環境では位置情報を取得できない場合がある。また、携帯電子機器は、通信を行う基地局との電波の送受信により位置を検出することもできるが、特定できる範囲が広いため位置検出の精度が低い。
【0005】
本発明は、上記に鑑みてなされたものであって、より高い精度で他の通信端末の位置を特定することができる携帯電子機器を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明は、自機と対象通信端末との相対位置情報を取得する携帯電子機器であって、所定の位置で移動しない基準通信端末と通信する通信部と、前記対象通信端末と通信可能な近距離通信部と、自機の位置情報を取得する位置情報取得部と、前記通信部で前記基準通信端末を介した通信または前記近距離通信部での通信により前記対象通信端末と当該基準通信端末との第1距離を算出し、前記通信部で前記基準通信端末と通信し、当該基準通信端末と自機との第2距離を算出し、前記近距離通信部での通信により前記対象通信端末と自機との第3距離を算出し、前記位置情報取得部で取得した位置情報と当該基準通信端末の位置情報に基づいて自機に対して当該基準通信端末がある方向を検出し、前記第1距離、前記第2距離および前記第3距離で形成される三角形あるいは当該三角形のすべての角部に接触する円のいずれか一方と、自機に対して当該基準通信端末がある方向と、に基づいて前記対象通信端末の位置を検出する予測位置算出処理を実行する制御部と、を有することを特徴とする。
【0007】
ここで、前記基準通信端末は、基地局であることが好ましい。
【0008】
また、自機の移動を検出する移動検出部をさらに有し、前記制御部は、前記移動検出部で自機の移動を検出したら、再度予測位置算出処理を実行することが好ましい。
【0009】
また、前記制御部は、前記予測位置算出処理で条件を満たす2箇所の予測位置を検出し、自機が移動しても絶対位置が変化しない検出結果を前記対象通信端末の位置とすることが好ましい。
【0010】
また、前記移動検出部は、自機に作用する加速度を検出する加速度センサを含むことが好ましい。
【0011】
また、画像を表示する表示部をさらに有し、前記制御部は、前記予測位置算出処理で条件を満たす2箇所の予測位置を前記対象通信端末の位置として検出し、自機と検出した2箇所の前記予測位置とで囲われる領域を前記表示部に表示することが好ましい。
【0012】
また、前記位置情報取得部は、GPS衛星から出力されるGPS信号に基づいて位置情報を取得することが好ましい。
【発明の効果】
【0013】
本発明にかかる携帯電子機器は、より高い精度で他の通信端末の位置を特定することができるという効果を奏する。
【図面の簡単な説明】
【0014】
【図1】図1は、本発明の携帯電話端末を有する通信システムの概略構成を示す説明図である。
【図2】図2は、携帯電話端末の外観を示す正面図である。
【図3】図3は、携帯電話端末の機能の概略構成を示すブロック図である。
【図4】図4は、携帯電話端末の探索動作を説明するための説明図である。
【図5】図5は、携帯電話端末の探索動作を説明するための説明図である。
【図6】図6は、携帯電話端末の撮影動作時の処理の一例を示すフロー図である。
【発明を実施するための形態】
【0015】
以下、本発明につき図面を参照しつつ詳細に説明する。なお、以下の説明により本発明が限定されるものではない。また、以下の説明における構成要素には、当業者が容易に想定できるもの、実質的に同一のもの、いわゆる均等の範囲のものが含まれる。以下においては、携帯電子機器として携帯電話端末を例として説明するが、本発明の適用対象は携帯電話端末に限定されるものではなく、通信機能を備える各種装置、例えば、PHS(Personal Handy-phone System)、PDA、ポータブルナビゲーション装置、ゲーム機等に対しても本発明は適用できる。
【0016】
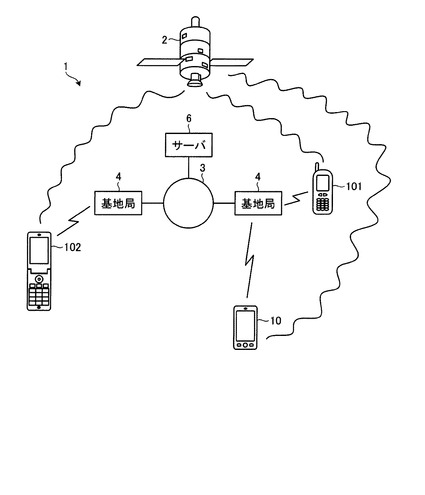
図1は、本発明の携帯電話端末を有する本発明の通信システムの概略構成を示す説明図である。図1に示す通信システム1は、GPS衛星2と、通信網3と、複数の基地局4と、サーバ6と、複数の携帯電話端末10、101、102とで構成されている。
【0017】
GPS衛星2は、GPS(Global Positioning System、全地球測位システム)の通信機能を備える通信装置(通信端末、通信機器)に、該通信装置の位置情報を送信(提供)する衛星である。なお、図1でGPS衛星2を1つのみ示したが、GPS衛星2は、通信装置の位置を特定するために必要な数(主として3つ、4つ)が配置されている。複数のGPS衛星2は、通信装置の位置情報の特定に必要なGPS信号(GPS衛星2の位置情報や時間情報)を出力する。なお、通信装置は、GPS衛星2から出力されるGPS信号を取得し解析することで自身の位置情報を取得する。なお、解析は、通信装置自身が行ってもよく、また外部のサーバ6にて行ってもよい。
【0018】
通信網(コアネットワーク)3は、交換機や、有線、無線の通信回線で構成されている。通信網3は、有線、無線の通信回線を用いて、基地局4を介して、携帯電話端末10、101、102と他の通信装置(他の携帯電話端末、固定型の通信装置、サーバ6)との間での情報通信を行う。通信網3は、通信装置間で通信を行うことができれば、種々の通信方法を用いることができる。例えば、衛星回線を利用して通信を行ってもよい。
【0019】
基地局4は、無線により携帯電話端末10、101、102と通信信号の送受信を行う通信機器である。なお、通信信号とは、通話や、メールの送受信や、インターネット通信を行うために、送受信するデータの信号である。また、基地局4は、通信網3と接続しており、通信網3と接続している通信端末と通信(通信信号を送受信)することができる。このように、基地局4は、通信網3と接続しており、携帯電話端末10、101、102と無線で通信を行うことで、通信網3を利用した携帯電話端末10、101、102の通信を中継する。なお、基地局4は、中継局を介して携帯電話端末10、101、102と通信を行うようにしてもよい。
【0020】
サーバ6は、呼び出し音や着信音の情報、呼び出し音及び着信音の制御条件、これらの制御プログラム、各通信装置を特定する情報(電話番号、アドレス)等種々のデータを有する。サーバ6は、通信網3及び基地局4を介して携帯電話端末10、101、102と通信し、種々の情報を供給する。また、サーバ6は、通信装置から情報を受信しその情報に基づいて他の通信装置に情報を通信する、情報の中継も行う。
【0021】
携帯電話端末10、101、102は、基地局4を介して通信網3との間で無線通信を行う通信端末である。携帯電話端末10、101、102は、音声信号等の信号を通信網3に送信し、通信網3から音声信号等の信号を受信する。また、それぞれの携帯電話端末10、101、102には、固有の電話番号、端末番号が割り当てられ、記憶されている。携帯電話端末10、101、102の構成については、後ほど説明する。
【0022】
通信システム1は、以上のような構成である。通信システム1は、ユーザの操作により例えば携帯電話端末10に発信操作が入力されると、携帯電話端末10から通信網3に対して、発信信号と通信先の電話番号の情報が送られる。通信網3は、入力された通信先の電話番号が割り当てられている他の携帯電話端末を検索し、通信先の他の携帯電話端末に着信を通知する。その後、通信先の携他の携帯電話端末で通話開始の操作が入力されたら、通信網3を介して通信を行う。つまり、通信システム1は、通信網3を介して情報の送受信を行うことで、携帯電話端末10と他の携帯電話端末との間で通信を行う。なお、通信システム1は、通信端末間での通信は、音声通信に限定されず、データの送受信も行う。また、携帯電話端末101、102の場合も同様である。また、通信システム1を構成する携帯電話端末10は、GPS衛星2から位置情報を取得することもできる。また、図1では、サーバ6を1つのみ、携帯電話端末は、3つのみ(10、101、102)を図示しているが、通信システム1は、多数の、サーバ6と、携帯電話端末10で構成することができる。また、図1では、通信システム1の通信網3で通信を行う機器として、携帯電話端末10、101、102、サーバ6のみを示したが、通信網3で通信可能な機器は、これには限定されない。通信システム1は、通信網3を介して、公衆通信網で通信可能な種々の通信装置間で通信を実行できる。例えば、PC(Personal Computer)等の情報通信機能を備える固定型の情報端末や、有線の電話回線を介して通信網3と接続された電話装置(固定電話)との間でも通信を実行できる。
【0023】
次に、携帯電話端末10、101、102について説明する。なお、携帯電話端末10と携帯電話端末101と携帯電話端末102とは、筐体の形状が異なるが内部構成は、基本的に同様の装置構成である。以下、携帯電話端末10を用いて説明する。
【0024】
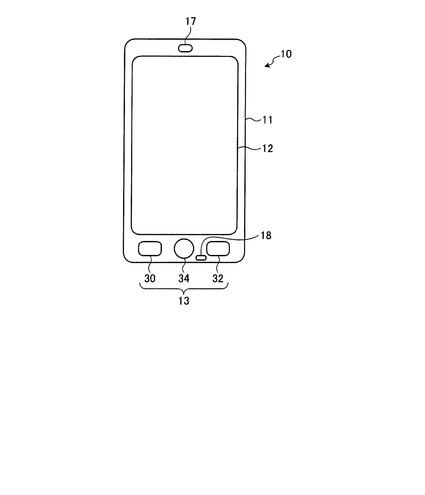
図2は、本発明の携帯電子機器の一実施形態である携帯電話端末10の外観を示す正面図であり、携帯電話端末10は、薄板状の筐体11を有する。携帯電話端末10は、筐体11の表面に、タッチパネル12と、ボタン30、ボタン32および入力デバイス34からなる入力部13と、レシーバ17と、マイク18と、が配置されている。タッチパネル12は、板状の筐体11の面積が最も広い面に配置されている。また、入力部13も、筐体11のタッチパネル12が配置されている面の、長手方向の一方の端部に配置されている。入力部13は、短手方向の一方から他方に向かって、ボタン30、入力デバイス34、ボタン32の順で配置されている。また、レシーバ17は、筐体11のタッチパネル12が配置されている面の長手方向の他方の端部、つまり、入力部13が配置されている端部とは反対側の端部に配置されている。また、マイク18は、筐体11のタッチパネル12が配置されている面の長手方向の一方の端部、つまり、入力部13が配置されている端部に配置されている。
【0025】
タッチパネル12は、文字、図形、画像等を表示するとともに、指、スタイラス、ペン(ペンの先端、棒状部材の先端)等(以下、単に「指」という)を用いてタッチパネル12に対して行われる各種動作を検出する。例えば、携帯電話端末10は、利用者から文字の入力を受け付けるために、タッチパネル12上に仮想キーボードを表示させる。携帯電話端末10は、タッチパネル12上に仮想キーボードを表示させた状態で、指によってタッチパネル12に入力される各種動作を検出し、仮想キーボードのどのキーが押下されたか、接触されたかを検出し、押下、接触を検出したキーを入力したキーとすることで、文字入力を行うことができる。また、タッチパネル12は、文字の入力によらず、表示させている画像と、指によってタッチパネル12に対して行われる各種動作とに基づいて、各種操作の入力を検出し、入力された操作に基づいて各種制御を行う。
【0026】
入力部13は、ボタン30、32が押下された場合に、押下されたボタンに対応する機能を起動させる。また、入力部13は、入力デバイス34に入力された動作も操作として検出し、入力された操作に基づいて各種制御を行う。例えば、入力デバイス34は、方向指示操作や決定操作を検出する。入力デバイス34は、タッチパッド、光学式入力デバイス、四方および中央にボタンを備える入力デバイス等で構成される。
【0027】
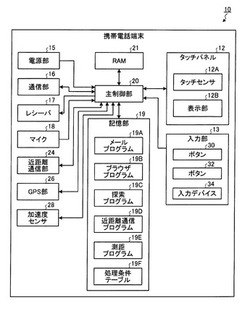
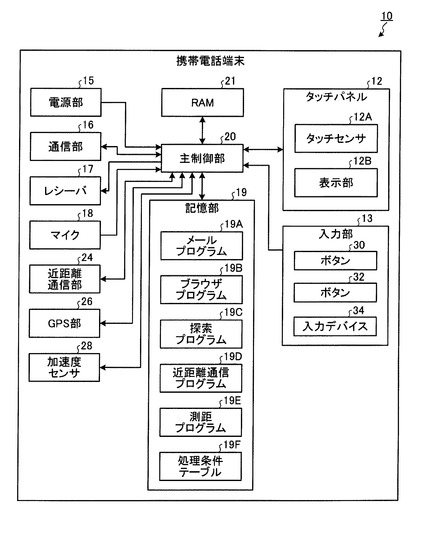
次に、携帯電話端末10の機能と制御部との関係を説明する。図3は、図2に示す携帯電話端末10の機能の概略構成を示すブロック図である。図3に示すように携帯電話端末10は、タッチパネル12と、入力部13と、電源部15と、通信部16と、レシーバ17と、マイク18と、記憶部19と、主制御部20と、RAM(Random Access Memory)21と、近距離通信部24と、GPS部26と、加速度センサ28と、を有する。
【0028】
タッチパネル12は、表示部12Bと、表示部12Bに重畳されたタッチセンサ12Aとを有する。タッチセンサ12Aは、指を用いてタッチパネル12に対して行われた各種動作を、動作が行われた場所のタッチパネル12上での位置とともに検出する。タッチセンサ12Aによって検出される動作には、指をタッチパネル12の表面に接触させる動作や、指をタッチパネル12の表面に接触させたまま移動させる動作や、指をタッチパネル12の表面から離す動作が含まれる。なお、タッチセンサ12Aは、感圧式、静電式等のいずれの検出方式を採用していてもよい。表示部12Bは、例えば、液晶ディスプレイ(LCD、Liquid Crystal Display)や、有機EL(Organic Electro−Luminescence)パネル等で構成され、文字、図形、画像等を表示する。
【0029】
入力部13は、上述したようにボタン30、32と、入力デバイス34とを有する。ボタン30、32は、物理的な入力(押下)を通じて利用者の操作を受け付け、受け付けた操作に対応する信号を主制御部20へ送信する。また、入力デバイス34も、利用者の操作を受け付け、受け付けた操作に対応する信号を主制御部20へ送信する。
【0030】
電源部15は、蓄電池または外部電源から得られる電力を、主制御部20を含む携帯電話端末10の各機能部へ供給する。通信部16は、基地局4によって割り当てられるチャネルを介し、基地局4との間でCDMA方式等による無線信号回線を確立し、基地局4との間で電話通信および情報通信を行う。レシーバ17は、電話通信における相手側の音声や着信音等を出力する。マイク18は、利用者等の音声を電気的な信号へ変換する。
【0031】
記憶部19は、例えば、不揮発性メモリや磁気記憶装置であり、主制御部20での処理に利用されるプログラムやデータを保存する。具体的には、記憶部19は、メールの送受信や閲覧のためのメールプログラム19Aや、WEBページの閲覧のためのブラウザプログラム19Bや、対象の通信端末(対象の携帯電話端末)の位置を検出する探索プログラム19Cや、近距離通信部24を用いて対象の通信端末(対象の携帯電話端末)を含む他の通信端末と情報の送受信を行うための近距離通信プログラム19Dや、取得した各種情報に基づいて距離を算出する測距プログラム19Eや、各種プログラムを実行する際に用いる各種条件を対応付けた処理条件テーブル19Fを記憶する。また、記憶部19には、携帯電話端末10の基本的な機能を実現するオペレーティングシステムプログラムや、氏名、電話番号、メールアドレス等が登録されたアドレス帳データ等の他のプログラムやデータも記憶される。また、記憶部19には、タッチパネル12に入力された入力操作に基づいて制御動作、処理を決定するプログラム等も記憶される。なお、制御動作、処理とは、携帯電話端末10で実行する各種動作、処理が含まれ、例えば、カーソル、ポインタの移動、画面の表示切換、文字入力処理、各種アプリケーションの起動処理、終了処理がある。
【0032】
主制御部20は、例えば、CPU(Central Processing Unit)であり、携帯電話端末10の動作を統括的に制御する。具体的には、主制御部20は、記憶部19に記憶されているデータを必要に応じて参照しつつ、記憶部19に記憶されているプログラムを実行して、タッチパネル12、入力部13、通信部16、近距離通信部24等を制御することによって各種処理を実行する。主制御部20は、記憶部19に記憶されているプログラムや、処理を実行することによって取得/生成/加工されたデータを、一時的な記憶領域を提供するRAM21に必要に応じて展開する。なお、主制御部20が実行するプログラムや参照するデータは、通信部16による無線通信でサーバ装置からダウンロードすることとしてもよい。
【0033】
近距離通信部24は、近距離無線通信技術を用いて、他の通信端末(他の携帯電話端末)と通信を行う通信部(情報通信部)である。なお、近距離無線通信技術としては、赤外線通信(IrDA(登録商標)、IrMC(登録商標)、IrSimple(登録商標))や、可視光通信や、Bluetooth(登録商標)や、磁界通信(RFID、Radio Frequency Identification)技術を用いることができる。
【0034】
GPS部26は、GPS衛星2から発信されるGPS信号を受信する通信部である。また、GPS部26は、受信したGSP信号から携帯電話端末10の緯度経度を算出し、算出した緯度経度の情報を主制御部20に送る。具体的には、GPS部26は、複数のGPS衛星2からGPS信号を取得し、GPS信号に含まれる時間情報と取得した時間情報との時間差や、受信した電波の強度等によりそれぞれのGPS衛星2からの距離を算出する。GPS部26は、GPS衛星2からの距離と各GPS衛星2の位置情報を解析することで、自身の位置を算出する。
【0035】
加速度センサ28は、筐体11に加わる加速度を検出する検出器である。ここで、加速度センサ28としては、種々の方法で加速度を検出する検出器を用いることができ、例えば、静電容量の変化や、ピエゾ抵抗の変化、相対位置の変化等で加速度を検出する検出器を用いることができる。また、加速度センサ28は、加速度の大きさに加え加速度の方向を検出する。加速度センサ28は、操作者が筐体11を移動させたり振ったりする際に筐体11に作用する加速度を検出し、検出した加速度情報を主制御部20に送る。主制御部20は、加速度センサ28の検出結果を解析することで、具体的には検出した加速度の情報を積算することで筐体11の姿勢の変化を算出し、携帯電話端末10(筐体11)の移動を検出する。なお、移動方向の特定には地磁気センサを用いてもよい。
【0036】
次に、図4から図6を用いて、利用者が携帯電話端末10を用いて他の通信端末を探索する際に携帯電話端末10で実行する探索動作の一例について説明する。図4は、携帯電話端末の探索動作を説明するための説明図である。図5は、携帯電話端末の探索動作を説明するための説明図である。図6は、携帯電話端末の撮影動作時の処理の一例を示すフロー図である。なお、図4および図5は、他の通信端末として携帯電話端末101を探索する場合を示している。
【0037】
まず、利用者は、携帯電話端末10を用いて近距離通信部24や通信部16での通信により探索の対象となる携帯電話端末101を特定する。また利用者は、携帯電話端末101の利用している基地局の情報やGPS情報を用いて大まかな位置情報を取得し、携帯電話端末10と携帯電話端末101とが同一の基地局4と通信を行い、近距離通信部24で通信可能な位置まで移動する。なお、利用者は、不特定の通信端末の探索を行い、同一の基地局4と通信を行い、近距離通信部24で通信可能な位置にある通信端末を対象の通信端末として検出してもよい。
【0038】
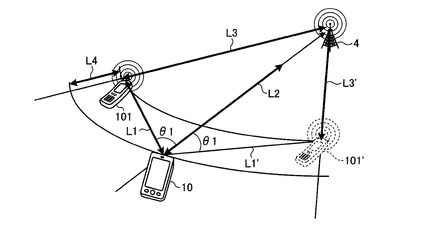
携帯電話端末10は、携帯電話端末101と同一の基地局4と通信を行い、近距離通信部24で通信可能な状態となった場合、図4に示すように、携帯電話端末10(自機)と携帯電話端末101(対象の通信端末)との距離L1と、携帯電話端末10と基地局4との距離L2と、携帯電話端末101と基地局4との距離L3と、を検出する。なお、距離L2と距離L3との距離差は距離L4となる。また、携帯電話端末10は、自機に対して基地局4がどの方向にあるかの方向情報を取得する。
【0039】
以下、各情報の検出方法について説明する。まず、距離L1の検出方法について説明する。携帯電話端末10は、近距離通信部24で携帯電話端末101と近距離通信を行い、距離L1を算出する。具体的には、携帯電話端末10は、近距離通信部24から測距信号を送信し、さらに測距信号を送信した時刻T1を記憶する。次に携帯電話端末101は、測距信号を受信したら、返信の信号を送信する。なお、返信の信号には、測距信号を受信した時刻T2および返信の信号を送信した時刻T3の情報が含まれている。携帯電話端末101から送信された測距信号に対する返信の信号を受信したら、返信の信号を受信した時刻T4を記憶する。また、返信の信号に含まれる測距信号を受信した時刻T2および返信の信号を送信した時刻T3の情報を記憶する。携帯電話端末10は、((T4−T3)+(T2−T1))/2で信号が携帯電話端末10と携帯電話端末101との間の伝達にかかる時間(片道の所要時間)を計算し、算出した時間に信号の速度(光速)を掛けることで、距離L1を算出する。
【0040】
また、携帯電話端末10は、距離L1を算出する情報に基づいて、携帯電話端末101と同期処理を行うことができる。具体的には、携帯電話端末10は、携帯電話端末101に((T4−T3)+(T2−T1))/2分進んだ時刻の情報を送信する。携帯電話端末101は、受信した時刻を現在の時刻に設定することで、携帯電話端末10と同期する。
【0041】
なお、上記方法は、携帯電話端末10と携帯電話端末101との時刻が同期していない場合でも距離を算出することができる。なお、携帯電話端末10と携帯電話端末101との時刻が同期している場合は、携帯電話端末10は、携帯電話端末101から送られてくる信号の時刻情報の時間遅れから距離L1を算出することができる。
【0042】
また、携帯電話端末10は、携帯電話端末101での信号の処理時間の情報を取得できる場合、携帯電話端末10から携帯電話端末101に信号を送りその返信の信号を受信するまでにかかった時間から携帯電話端末101での信号の処理時間を減算することで、信号の往復にかかる時間を算出することができ、往復の時間から距離L1を算出することができる。なお、この場合は、時刻の同期は必要ない。
【0043】
次に、距離L2の検出方法について説明する。携帯電話端末10は、通信部16を用いた基地局4との通信で上述した距離L1を算出した方法と同様の処理のいずれかを実行し、距離L2を算出する。
【0044】
また、距離L3の検出方法について説明する。携帯電話端末10は、近距離通信部24または通信部16で携帯電話端末101と通信して距離L3の情報を取得する。この場合、携帯電話端末101は、通信部16を用いた基地局4との通信で上述した距離L1を算出した方法と同様の処理のいずれかを実行し、距離L3を算出し、算出した距離L3の情報を近距離通信部24または通信部16で携帯電話端末10に送る。
【0045】
また、他の算出方法としては、携帯電話端末10は、時刻を同期した状態で携帯電話端末101が基地局4からの任意の信号(報知情報等)を受信した時刻の情報を取得する。携帯電話端末10は、携帯電話端末101から取得した時刻の情報と、自機が当該任意の信号を受信した時刻と、の時間差から携帯電話端末10と携帯電話端末101との距離の差分L4を算出する。その後、携帯電話端末10は、距離L2に距離L4を加算または減算することでも距離L3を算出することができる。
【0046】
次に、自機に対して基地局4がどの方向にあるかの方向情報の検出方法について説明する。携帯電話端末10は、GPS部26で自身の位置情報を算出し、基地局4の位置情報と比較することで、方向情報を算出することができる。なお、基地局4の位置情報は通信部16を介した通信で情報を取得すればよい。また、携帯電話端末10は、GPS部26で取得した情報に基づいて位置を算出することに限定されず、自身の位置情報を取得する種々の方法を用いることができる。例えば携帯電話端末10は、通信部16を介して、基準となる基地局を含む周囲の複数の基地局4と通信を行い、通信可能な複数の基地局4の位置情報と当該基地局4との距離を算出する。携帯電話端末10は、複数の基地局4の位置情報と当該基地局4との距離とで自身の位置を特定することができる。なお、方向情報は、所定の範囲での方向が検出できればよい。
【0047】
携帯電話端末10は、距離L1と距離L2と距離L3と方向情報とを用いて、対象の携帯電話端末101の位置情報を取得する。具体的には、携帯電話端末10は、図4に示すように、距離L1と距離L2と距離L3とを用いて基地局4と携帯電話端末10と携帯電話端末101とで構成される三角形の形状を算出し、当該三角形の携帯電話端末10の頂点の角θ1を算出する。携帯電話端末10は、方向情報に基づいて自機に対する基地局4の方向を特定し、その方向に対して角θ1となる2つの方向を特定する。その後、携帯電話端末10は、特定した2つの方向から距離L1離れた位置を携帯電話端末101がある予測位置として算出する。なお、2箇所の予測位置(2つの予測位置)のうち一方は、距離L1´と距離L3´と携帯電話端末101´で示すように実際には携帯電話端末101がない位置となる。なお、距離L3´は、距離L3と同一距離である。
【0048】
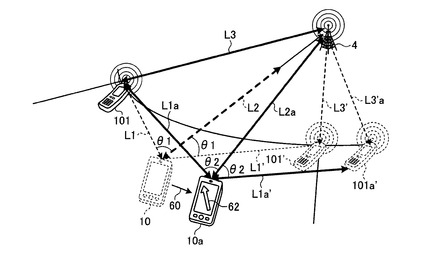
携帯電話端末10は、上記予測位置算出処理を行った後、図5の矢印60に示すように移動されたことを検出した場合、再度予測位置算出処理を行う。携帯電話端末10は、加速度センサ28で加速度を検出することで自機の移動を検出することができる。移動した携帯電話端末10aは、予測位置算出処理を行い、距離L1aと距離L2aと距離L3と方向情報とを算出する。ここで、携帯電話端末101は移動していないので移動した携帯電話端末10aが算出する距離L3は、移動前の携帯電話端末10が算出した距離L3と同一距離となる。
【0049】
携帯電話端末10aは、距離L1aと距離L2aと距離L3と方向情報とを用いて、対象の携帯電話端末101の位置情報を取得する。具体的には、携帯電話端末10は、図5に示すように、距離L1aと距離L2aと距離L3とを用いて基地局4と携帯電話端末10と携帯電話端末101とで構成される三角形の形状を算出し、当該三角形の携帯電話端末10の頂点の角θ2を算出する。携帯電話端末10は、方向情報に基づいて自機に対する基地局4の方向を特定し、その方向に対して角θ2となる2つの方向を特定する。その後、携帯電話端末10は、特定した2つの方向から距離L1a離れた位置を携帯電話端末101がある予測位置として算出する。
【0050】
ここで、携帯電話端末10aが検出した2箇所の予測位置のうち一方は、距離L1a´と距離L3a´携帯電話端末101a´で示すように実際には携帯電話端末101がない位置となる。なお、距離L3a´は、距離L3と同一距離である。これに対して、携帯電話端末10aが検出した2箇所の予測位置のうち他方は、携帯電話端末101が実際にある位置である。このため、携帯電話端末10の位置と、携帯電話端末10aの位置で検出したそれぞれ2箇所の予測位置のうち、実際に携帯電話端末101がある予測位置は絶対位置が変化せず、携帯電話端末101がない算出位置である携帯電話端末101´と携帯電話端末101a´とは異なる位置となる。
【0051】
以上の関係から携帯電話端末10aは、絶対位置が変化しない、つまり相対位置が自機の矢印60の移動に対応した距離変化した予測位置を携帯電話端末101の位置として特定する。携帯電話端末10aは、携帯電話端末101の位置を特定したら、携帯電話端末101の位置を示す矢印情報62を表示させる。
【0052】
以下、図6を用いて携帯電話端末10の処理動作について説明する。図6に示す処理手順は、探索プログラム19C、近距離通信プログラム9D、測距プログラム9Eが提供する機能に基づいて繰り返し実行される。より具体的には、近距離通信プログラム9Dが提供する機能(通信機能)、測距プログラム9Eが提供する機能(距離検出機能)等により取得した各種検出結果に基づいて、探索プログラム9Cが提供する機能(探索機能、位置検出機能)を実行し、対象の通信端末の位置を検出する。携帯電話端末10は、探索機能を起動する指示が入力された場合、図6に示す処理を行う。
【0053】
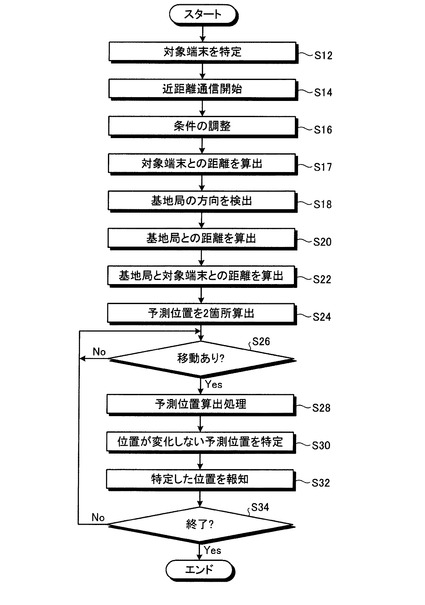
携帯電話端末10の主制御部20は、ステップS12として対象端末(対象の通信端末)を特定する。なお、携帯電話端末10は、上述したように特定の通信端末を対象の通信端末としても、探索を行っている間に検出された任意の通信端末を対象の通信端末としてもよい。主制御部20は、ステップS12で対象端末を特定したら、ステップS14として近距離通信を開始する。具体的には、近距離通信部24を起動し、通信可能な対象端末との通信を開始する。なお、主制御部20は、既に近距離通信機能が起動された対象端末を通信相手としても、自身で強制的に近距離通信機能を起動させた対象端末を通信相手としてもよい。
【0054】
主制御部20は、ステップS14で近距離通信を開始したら、ステップS16として条件の調整を行う。主制御部20は、例えば使用する電波の強度や周波数帯域、通信のタイミング、出力する信号の情報等の探索に用いる各種条件を設定する。主制御部20は、対象端末および基地局と通信を行い、これらの条件を設定する。また、主制御部20は、自機と対象端末と基地局との間で時刻を同期させる同期処理を行ってもよい。
【0055】
主制御部20は、ステップS16で条件の調整を行ったら、ステップS17として、対象端末との距離、つまり距離L1を算出する。また、主制御部20は、ステップS17で距離L1を算出したら、ステップS18として基地局の方向を検出、つまり方向情報を取得する。主制御部20は、ステップS18で方向情報を取得したら、ステップS20として基地局との距離、つまり距離L2を算出する。主制御部20は、ステップS20で距離L2を算出したら、ステップS22として、基地局と対象端末との距離、つまり距離L3を算出する。なお、距離L1、距離L2、距離L3、方向情報は、上述した各種方法で算出、検出する。また、ステップS17からステップS22までの処理は、処理の順番は特に限定されない。
【0056】
主制御部20は、ステップS22の処理を行ったら、ステップS24として2箇所の予測位置(2つの予測位置)を算出する。つまり、距離L1、距離L2、距離L3、方向情報に基づいて特定される2ヶ所の予測位置を算出する。
【0057】
主制御部20は、ステップS24の処理を行ったら、ステップS26として移動ありかを判定する。なお、移動しているかは加速度センサ28の検出結果から判定する。主制御部20は、ステップS26で移動していない(No)と判定した場合、ステップS26に進む。つまり、主制御部20は、移動ありと判定するまでステップS26の処理を繰り返す。
【0058】
主制御部20は、ステップS26で移動あり(Yes)と判定した場合、ステップS28として、予測位置算出処理を行う。なお、予測位置算出処理とは、ステップS17からステップS24までの処理である。主制御部20は、ステップS28で予測位置算出処理を行い移動後の2ヶ所の予測位置を算出したら、ステップS30として位置が変化(移動)しない予測位置を特定する。つまり、ステップS28で算出した2ヶ所の予測位置と、以前に算出した2ヶ所の予測位置とを比較し、絶対位置が変化していない予測位置を特定する。
【0059】
主制御部20は、ステップS30で位置が変化しない予測位置を特定したら、ステップS32として特定した位置を報知する。つまり、主制御部20は、ステップS30で特定した位置が変化しない予測位置を対象端末の位置として特定して利用者に報知する。なお報知の方法は特に限定されないが、タッチパネル12の表示部12Bに地図を表示させ当該地図上に特定した位置を表示させる方法や、表示部12Bに特定した位置に向かう矢印を表示させる方法や、レシーバ17から音声で特定した位置の情報、特定した位置と自身の位置との相対関係の情報、自身の位置から特定した位置への移動経路の情報等を出力してもよい。
【0060】
主制御部20は、ステップS32で報知を行ったら、ステップS34として終了かを判定する。主制御部20は、ステップS34で終了ではない(No)と判定した場合、ステップS26に進み、終了である(Yes)と判定した場合、本処理を終了する。
【0061】
このように、携帯電話端末10は、通信部16と近距離通信部24とを用いた通信により基地局4との相対関係を利用して対象の通信端末の位置を検出することで、対象の通信端末の位置を高い精度で検出することができる。つまり、携帯電話端末10は、複数の基地局との通信状態から対象の通信端末の位置を特定する場合よりも高い精度で位置を検出することができ、GPS機能が使用できない環境でも位置を検出することができる。具体的には、災害時に対象の通信端末が倒壊した建物の内部にありGPS機能を用いて位置を特定できない場合でも、携帯電話端末10の利用者は、対象の通信端末の位置を高い精度で検出することができる。これにより対象の通信端末を所持している利用者を救出できる可能性を高くすることができる。
【0062】
なお、上記実施形態の携帯電話端末10は、予測位置算出処理を複数回行い、2箇所の予測位置から携帯電話端末があると判定した1つの位置を特定、つまり携帯電話端末がないと判定した1つの予測位置を排除したがこれに限定されない。携帯電話端末10は、例えば、2箇所の予測位置をそのまま、対象の通信端末(携帯電話端末101)として特定し、報知してもよい。また、携帯電話端末10は、2箇所の予測位置と自機の位置とで形成される三角形を探索エリアとして報知してもよい。このように2箇所の予測位置やエリアとして報知することでも、利用者は捜索の範囲を狭くすることができる。また、移動して対象に近づくと距離が短くなりまたはエリアの面積が小さくなり、移動して対象から遠ざかると距離が長くなりまたはエリアの面積が大きくなるため、どちらが対象の通信端末がある位置かを利用者が簡単に識別することができる。また、上記実施形態では、第1距離、第2距離および第3距離で形成される三角形を用いたが、当該三角形のすべての角部に接触する円を用いてもよい。また、自身の位置と2箇所の予測位置とで形成される三角形のすべての角部に接触する円を用いてもよい。
【0063】
また、上記実施形態の携帯電話端末10は、自機と対象の通信端末と基地局4との夫々の間の距離を算出し位置を特定したが、基地局4に換えて他の種々の通信機器を基準通信端末として用いることができる。例えば、携帯電話端末10は、基地局4に換えて他の携帯電話端末を基準通信端末として用いることもできる。この場合、基準通信端末となる他の携帯電話端末は一定の場所から動かない状態とする。このように他の携帯電話端末を用いることでも、自機と対象の通信端末と他の携帯電話端末との夫々の間の距離を算出することで対称の通信端末の位置を特定することができる。また、他の携帯電話端末にも特定されず、相対的な方位の情報と信号の送受信ができ、所定の位置から動かない状態にできる通信端末であれば、種々の通信端末を基準通信端末として用いることができる。
【符号の説明】
【0064】
10 携帯電話端末
11 筐体
12 タッチパネル
12A タッチセンサ
12B 表示部
13 入力部
15 電源部
16 通信部
17 レシーバ
18 マイク
19 記憶部
19A メールプログラム
19B ブラウザプログラム
19C 探索プログラム
19D 近距離通信プログラム
19E 測距プログラム
19F 処理条件テーブル
20 主制御部
21 RAM
24 近距離通信部
26 GPS部
28 加速度センサ
30、32 ボタン
34 入力デバイス
【技術分野】
【0001】
本発明は、通信機能を備える携帯電子機器に関する。
【背景技術】
【0002】
近年、携帯電話機等の携帯電話端末には、種々の機能が搭載されている。例えば、特許文献1には、GPS衛星から出力される信号を用いて自身の位置を特定し、地図情報を取得し、経路案内を行うナビゲーション機能を備えている携帯電子機器が記載されている。また、特許文献2には、他の通信端末がGPS衛星から出力される信号を用いて取得した位置情報を通信機能で取得する携帯電子機器が記載されている。特許文献2に記載の携帯電子機器は、他の通信端末の位置情報を取得することで、他の通信端末の位置を特定することができ、他の通信端末を持っている人物を見つけることができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−345115号公報
【特許文献2】特開2003−227868号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献2に記載されているようにGPS衛星から出力されるGPS信号は電波の強度が微弱であるため、空が見えない環境では位置情報を取得できない場合がある。また、携帯電子機器は、通信を行う基地局との電波の送受信により位置を検出することもできるが、特定できる範囲が広いため位置検出の精度が低い。
【0005】
本発明は、上記に鑑みてなされたものであって、より高い精度で他の通信端末の位置を特定することができる携帯電子機器を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明は、自機と対象通信端末との相対位置情報を取得する携帯電子機器であって、所定の位置で移動しない基準通信端末と通信する通信部と、前記対象通信端末と通信可能な近距離通信部と、自機の位置情報を取得する位置情報取得部と、前記通信部で前記基準通信端末を介した通信または前記近距離通信部での通信により前記対象通信端末と当該基準通信端末との第1距離を算出し、前記通信部で前記基準通信端末と通信し、当該基準通信端末と自機との第2距離を算出し、前記近距離通信部での通信により前記対象通信端末と自機との第3距離を算出し、前記位置情報取得部で取得した位置情報と当該基準通信端末の位置情報に基づいて自機に対して当該基準通信端末がある方向を検出し、前記第1距離、前記第2距離および前記第3距離で形成される三角形あるいは当該三角形のすべての角部に接触する円のいずれか一方と、自機に対して当該基準通信端末がある方向と、に基づいて前記対象通信端末の位置を検出する予測位置算出処理を実行する制御部と、を有することを特徴とする。
【0007】
ここで、前記基準通信端末は、基地局であることが好ましい。
【0008】
また、自機の移動を検出する移動検出部をさらに有し、前記制御部は、前記移動検出部で自機の移動を検出したら、再度予測位置算出処理を実行することが好ましい。
【0009】
また、前記制御部は、前記予測位置算出処理で条件を満たす2箇所の予測位置を検出し、自機が移動しても絶対位置が変化しない検出結果を前記対象通信端末の位置とすることが好ましい。
【0010】
また、前記移動検出部は、自機に作用する加速度を検出する加速度センサを含むことが好ましい。
【0011】
また、画像を表示する表示部をさらに有し、前記制御部は、前記予測位置算出処理で条件を満たす2箇所の予測位置を前記対象通信端末の位置として検出し、自機と検出した2箇所の前記予測位置とで囲われる領域を前記表示部に表示することが好ましい。
【0012】
また、前記位置情報取得部は、GPS衛星から出力されるGPS信号に基づいて位置情報を取得することが好ましい。
【発明の効果】
【0013】
本発明にかかる携帯電子機器は、より高い精度で他の通信端末の位置を特定することができるという効果を奏する。
【図面の簡単な説明】
【0014】
【図1】図1は、本発明の携帯電話端末を有する通信システムの概略構成を示す説明図である。
【図2】図2は、携帯電話端末の外観を示す正面図である。
【図3】図3は、携帯電話端末の機能の概略構成を示すブロック図である。
【図4】図4は、携帯電話端末の探索動作を説明するための説明図である。
【図5】図5は、携帯電話端末の探索動作を説明するための説明図である。
【図6】図6は、携帯電話端末の撮影動作時の処理の一例を示すフロー図である。
【発明を実施するための形態】
【0015】
以下、本発明につき図面を参照しつつ詳細に説明する。なお、以下の説明により本発明が限定されるものではない。また、以下の説明における構成要素には、当業者が容易に想定できるもの、実質的に同一のもの、いわゆる均等の範囲のものが含まれる。以下においては、携帯電子機器として携帯電話端末を例として説明するが、本発明の適用対象は携帯電話端末に限定されるものではなく、通信機能を備える各種装置、例えば、PHS(Personal Handy-phone System)、PDA、ポータブルナビゲーション装置、ゲーム機等に対しても本発明は適用できる。
【0016】
図1は、本発明の携帯電話端末を有する本発明の通信システムの概略構成を示す説明図である。図1に示す通信システム1は、GPS衛星2と、通信網3と、複数の基地局4と、サーバ6と、複数の携帯電話端末10、101、102とで構成されている。
【0017】
GPS衛星2は、GPS(Global Positioning System、全地球測位システム)の通信機能を備える通信装置(通信端末、通信機器)に、該通信装置の位置情報を送信(提供)する衛星である。なお、図1でGPS衛星2を1つのみ示したが、GPS衛星2は、通信装置の位置を特定するために必要な数(主として3つ、4つ)が配置されている。複数のGPS衛星2は、通信装置の位置情報の特定に必要なGPS信号(GPS衛星2の位置情報や時間情報)を出力する。なお、通信装置は、GPS衛星2から出力されるGPS信号を取得し解析することで自身の位置情報を取得する。なお、解析は、通信装置自身が行ってもよく、また外部のサーバ6にて行ってもよい。
【0018】
通信網(コアネットワーク)3は、交換機や、有線、無線の通信回線で構成されている。通信網3は、有線、無線の通信回線を用いて、基地局4を介して、携帯電話端末10、101、102と他の通信装置(他の携帯電話端末、固定型の通信装置、サーバ6)との間での情報通信を行う。通信網3は、通信装置間で通信を行うことができれば、種々の通信方法を用いることができる。例えば、衛星回線を利用して通信を行ってもよい。
【0019】
基地局4は、無線により携帯電話端末10、101、102と通信信号の送受信を行う通信機器である。なお、通信信号とは、通話や、メールの送受信や、インターネット通信を行うために、送受信するデータの信号である。また、基地局4は、通信網3と接続しており、通信網3と接続している通信端末と通信(通信信号を送受信)することができる。このように、基地局4は、通信網3と接続しており、携帯電話端末10、101、102と無線で通信を行うことで、通信網3を利用した携帯電話端末10、101、102の通信を中継する。なお、基地局4は、中継局を介して携帯電話端末10、101、102と通信を行うようにしてもよい。
【0020】
サーバ6は、呼び出し音や着信音の情報、呼び出し音及び着信音の制御条件、これらの制御プログラム、各通信装置を特定する情報(電話番号、アドレス)等種々のデータを有する。サーバ6は、通信網3及び基地局4を介して携帯電話端末10、101、102と通信し、種々の情報を供給する。また、サーバ6は、通信装置から情報を受信しその情報に基づいて他の通信装置に情報を通信する、情報の中継も行う。
【0021】
携帯電話端末10、101、102は、基地局4を介して通信網3との間で無線通信を行う通信端末である。携帯電話端末10、101、102は、音声信号等の信号を通信網3に送信し、通信網3から音声信号等の信号を受信する。また、それぞれの携帯電話端末10、101、102には、固有の電話番号、端末番号が割り当てられ、記憶されている。携帯電話端末10、101、102の構成については、後ほど説明する。
【0022】
通信システム1は、以上のような構成である。通信システム1は、ユーザの操作により例えば携帯電話端末10に発信操作が入力されると、携帯電話端末10から通信網3に対して、発信信号と通信先の電話番号の情報が送られる。通信網3は、入力された通信先の電話番号が割り当てられている他の携帯電話端末を検索し、通信先の他の携帯電話端末に着信を通知する。その後、通信先の携他の携帯電話端末で通話開始の操作が入力されたら、通信網3を介して通信を行う。つまり、通信システム1は、通信網3を介して情報の送受信を行うことで、携帯電話端末10と他の携帯電話端末との間で通信を行う。なお、通信システム1は、通信端末間での通信は、音声通信に限定されず、データの送受信も行う。また、携帯電話端末101、102の場合も同様である。また、通信システム1を構成する携帯電話端末10は、GPS衛星2から位置情報を取得することもできる。また、図1では、サーバ6を1つのみ、携帯電話端末は、3つのみ(10、101、102)を図示しているが、通信システム1は、多数の、サーバ6と、携帯電話端末10で構成することができる。また、図1では、通信システム1の通信網3で通信を行う機器として、携帯電話端末10、101、102、サーバ6のみを示したが、通信網3で通信可能な機器は、これには限定されない。通信システム1は、通信網3を介して、公衆通信網で通信可能な種々の通信装置間で通信を実行できる。例えば、PC(Personal Computer)等の情報通信機能を備える固定型の情報端末や、有線の電話回線を介して通信網3と接続された電話装置(固定電話)との間でも通信を実行できる。
【0023】
次に、携帯電話端末10、101、102について説明する。なお、携帯電話端末10と携帯電話端末101と携帯電話端末102とは、筐体の形状が異なるが内部構成は、基本的に同様の装置構成である。以下、携帯電話端末10を用いて説明する。
【0024】
図2は、本発明の携帯電子機器の一実施形態である携帯電話端末10の外観を示す正面図であり、携帯電話端末10は、薄板状の筐体11を有する。携帯電話端末10は、筐体11の表面に、タッチパネル12と、ボタン30、ボタン32および入力デバイス34からなる入力部13と、レシーバ17と、マイク18と、が配置されている。タッチパネル12は、板状の筐体11の面積が最も広い面に配置されている。また、入力部13も、筐体11のタッチパネル12が配置されている面の、長手方向の一方の端部に配置されている。入力部13は、短手方向の一方から他方に向かって、ボタン30、入力デバイス34、ボタン32の順で配置されている。また、レシーバ17は、筐体11のタッチパネル12が配置されている面の長手方向の他方の端部、つまり、入力部13が配置されている端部とは反対側の端部に配置されている。また、マイク18は、筐体11のタッチパネル12が配置されている面の長手方向の一方の端部、つまり、入力部13が配置されている端部に配置されている。
【0025】
タッチパネル12は、文字、図形、画像等を表示するとともに、指、スタイラス、ペン(ペンの先端、棒状部材の先端)等(以下、単に「指」という)を用いてタッチパネル12に対して行われる各種動作を検出する。例えば、携帯電話端末10は、利用者から文字の入力を受け付けるために、タッチパネル12上に仮想キーボードを表示させる。携帯電話端末10は、タッチパネル12上に仮想キーボードを表示させた状態で、指によってタッチパネル12に入力される各種動作を検出し、仮想キーボードのどのキーが押下されたか、接触されたかを検出し、押下、接触を検出したキーを入力したキーとすることで、文字入力を行うことができる。また、タッチパネル12は、文字の入力によらず、表示させている画像と、指によってタッチパネル12に対して行われる各種動作とに基づいて、各種操作の入力を検出し、入力された操作に基づいて各種制御を行う。
【0026】
入力部13は、ボタン30、32が押下された場合に、押下されたボタンに対応する機能を起動させる。また、入力部13は、入力デバイス34に入力された動作も操作として検出し、入力された操作に基づいて各種制御を行う。例えば、入力デバイス34は、方向指示操作や決定操作を検出する。入力デバイス34は、タッチパッド、光学式入力デバイス、四方および中央にボタンを備える入力デバイス等で構成される。
【0027】
次に、携帯電話端末10の機能と制御部との関係を説明する。図3は、図2に示す携帯電話端末10の機能の概略構成を示すブロック図である。図3に示すように携帯電話端末10は、タッチパネル12と、入力部13と、電源部15と、通信部16と、レシーバ17と、マイク18と、記憶部19と、主制御部20と、RAM(Random Access Memory)21と、近距離通信部24と、GPS部26と、加速度センサ28と、を有する。
【0028】
タッチパネル12は、表示部12Bと、表示部12Bに重畳されたタッチセンサ12Aとを有する。タッチセンサ12Aは、指を用いてタッチパネル12に対して行われた各種動作を、動作が行われた場所のタッチパネル12上での位置とともに検出する。タッチセンサ12Aによって検出される動作には、指をタッチパネル12の表面に接触させる動作や、指をタッチパネル12の表面に接触させたまま移動させる動作や、指をタッチパネル12の表面から離す動作が含まれる。なお、タッチセンサ12Aは、感圧式、静電式等のいずれの検出方式を採用していてもよい。表示部12Bは、例えば、液晶ディスプレイ(LCD、Liquid Crystal Display)や、有機EL(Organic Electro−Luminescence)パネル等で構成され、文字、図形、画像等を表示する。
【0029】
入力部13は、上述したようにボタン30、32と、入力デバイス34とを有する。ボタン30、32は、物理的な入力(押下)を通じて利用者の操作を受け付け、受け付けた操作に対応する信号を主制御部20へ送信する。また、入力デバイス34も、利用者の操作を受け付け、受け付けた操作に対応する信号を主制御部20へ送信する。
【0030】
電源部15は、蓄電池または外部電源から得られる電力を、主制御部20を含む携帯電話端末10の各機能部へ供給する。通信部16は、基地局4によって割り当てられるチャネルを介し、基地局4との間でCDMA方式等による無線信号回線を確立し、基地局4との間で電話通信および情報通信を行う。レシーバ17は、電話通信における相手側の音声や着信音等を出力する。マイク18は、利用者等の音声を電気的な信号へ変換する。
【0031】
記憶部19は、例えば、不揮発性メモリや磁気記憶装置であり、主制御部20での処理に利用されるプログラムやデータを保存する。具体的には、記憶部19は、メールの送受信や閲覧のためのメールプログラム19Aや、WEBページの閲覧のためのブラウザプログラム19Bや、対象の通信端末(対象の携帯電話端末)の位置を検出する探索プログラム19Cや、近距離通信部24を用いて対象の通信端末(対象の携帯電話端末)を含む他の通信端末と情報の送受信を行うための近距離通信プログラム19Dや、取得した各種情報に基づいて距離を算出する測距プログラム19Eや、各種プログラムを実行する際に用いる各種条件を対応付けた処理条件テーブル19Fを記憶する。また、記憶部19には、携帯電話端末10の基本的な機能を実現するオペレーティングシステムプログラムや、氏名、電話番号、メールアドレス等が登録されたアドレス帳データ等の他のプログラムやデータも記憶される。また、記憶部19には、タッチパネル12に入力された入力操作に基づいて制御動作、処理を決定するプログラム等も記憶される。なお、制御動作、処理とは、携帯電話端末10で実行する各種動作、処理が含まれ、例えば、カーソル、ポインタの移動、画面の表示切換、文字入力処理、各種アプリケーションの起動処理、終了処理がある。
【0032】
主制御部20は、例えば、CPU(Central Processing Unit)であり、携帯電話端末10の動作を統括的に制御する。具体的には、主制御部20は、記憶部19に記憶されているデータを必要に応じて参照しつつ、記憶部19に記憶されているプログラムを実行して、タッチパネル12、入力部13、通信部16、近距離通信部24等を制御することによって各種処理を実行する。主制御部20は、記憶部19に記憶されているプログラムや、処理を実行することによって取得/生成/加工されたデータを、一時的な記憶領域を提供するRAM21に必要に応じて展開する。なお、主制御部20が実行するプログラムや参照するデータは、通信部16による無線通信でサーバ装置からダウンロードすることとしてもよい。
【0033】
近距離通信部24は、近距離無線通信技術を用いて、他の通信端末(他の携帯電話端末)と通信を行う通信部(情報通信部)である。なお、近距離無線通信技術としては、赤外線通信(IrDA(登録商標)、IrMC(登録商標)、IrSimple(登録商標))や、可視光通信や、Bluetooth(登録商標)や、磁界通信(RFID、Radio Frequency Identification)技術を用いることができる。
【0034】
GPS部26は、GPS衛星2から発信されるGPS信号を受信する通信部である。また、GPS部26は、受信したGSP信号から携帯電話端末10の緯度経度を算出し、算出した緯度経度の情報を主制御部20に送る。具体的には、GPS部26は、複数のGPS衛星2からGPS信号を取得し、GPS信号に含まれる時間情報と取得した時間情報との時間差や、受信した電波の強度等によりそれぞれのGPS衛星2からの距離を算出する。GPS部26は、GPS衛星2からの距離と各GPS衛星2の位置情報を解析することで、自身の位置を算出する。
【0035】
加速度センサ28は、筐体11に加わる加速度を検出する検出器である。ここで、加速度センサ28としては、種々の方法で加速度を検出する検出器を用いることができ、例えば、静電容量の変化や、ピエゾ抵抗の変化、相対位置の変化等で加速度を検出する検出器を用いることができる。また、加速度センサ28は、加速度の大きさに加え加速度の方向を検出する。加速度センサ28は、操作者が筐体11を移動させたり振ったりする際に筐体11に作用する加速度を検出し、検出した加速度情報を主制御部20に送る。主制御部20は、加速度センサ28の検出結果を解析することで、具体的には検出した加速度の情報を積算することで筐体11の姿勢の変化を算出し、携帯電話端末10(筐体11)の移動を検出する。なお、移動方向の特定には地磁気センサを用いてもよい。
【0036】
次に、図4から図6を用いて、利用者が携帯電話端末10を用いて他の通信端末を探索する際に携帯電話端末10で実行する探索動作の一例について説明する。図4は、携帯電話端末の探索動作を説明するための説明図である。図5は、携帯電話端末の探索動作を説明するための説明図である。図6は、携帯電話端末の撮影動作時の処理の一例を示すフロー図である。なお、図4および図5は、他の通信端末として携帯電話端末101を探索する場合を示している。
【0037】
まず、利用者は、携帯電話端末10を用いて近距離通信部24や通信部16での通信により探索の対象となる携帯電話端末101を特定する。また利用者は、携帯電話端末101の利用している基地局の情報やGPS情報を用いて大まかな位置情報を取得し、携帯電話端末10と携帯電話端末101とが同一の基地局4と通信を行い、近距離通信部24で通信可能な位置まで移動する。なお、利用者は、不特定の通信端末の探索を行い、同一の基地局4と通信を行い、近距離通信部24で通信可能な位置にある通信端末を対象の通信端末として検出してもよい。
【0038】
携帯電話端末10は、携帯電話端末101と同一の基地局4と通信を行い、近距離通信部24で通信可能な状態となった場合、図4に示すように、携帯電話端末10(自機)と携帯電話端末101(対象の通信端末)との距離L1と、携帯電話端末10と基地局4との距離L2と、携帯電話端末101と基地局4との距離L3と、を検出する。なお、距離L2と距離L3との距離差は距離L4となる。また、携帯電話端末10は、自機に対して基地局4がどの方向にあるかの方向情報を取得する。
【0039】
以下、各情報の検出方法について説明する。まず、距離L1の検出方法について説明する。携帯電話端末10は、近距離通信部24で携帯電話端末101と近距離通信を行い、距離L1を算出する。具体的には、携帯電話端末10は、近距離通信部24から測距信号を送信し、さらに測距信号を送信した時刻T1を記憶する。次に携帯電話端末101は、測距信号を受信したら、返信の信号を送信する。なお、返信の信号には、測距信号を受信した時刻T2および返信の信号を送信した時刻T3の情報が含まれている。携帯電話端末101から送信された測距信号に対する返信の信号を受信したら、返信の信号を受信した時刻T4を記憶する。また、返信の信号に含まれる測距信号を受信した時刻T2および返信の信号を送信した時刻T3の情報を記憶する。携帯電話端末10は、((T4−T3)+(T2−T1))/2で信号が携帯電話端末10と携帯電話端末101との間の伝達にかかる時間(片道の所要時間)を計算し、算出した時間に信号の速度(光速)を掛けることで、距離L1を算出する。
【0040】
また、携帯電話端末10は、距離L1を算出する情報に基づいて、携帯電話端末101と同期処理を行うことができる。具体的には、携帯電話端末10は、携帯電話端末101に((T4−T3)+(T2−T1))/2分進んだ時刻の情報を送信する。携帯電話端末101は、受信した時刻を現在の時刻に設定することで、携帯電話端末10と同期する。
【0041】
なお、上記方法は、携帯電話端末10と携帯電話端末101との時刻が同期していない場合でも距離を算出することができる。なお、携帯電話端末10と携帯電話端末101との時刻が同期している場合は、携帯電話端末10は、携帯電話端末101から送られてくる信号の時刻情報の時間遅れから距離L1を算出することができる。
【0042】
また、携帯電話端末10は、携帯電話端末101での信号の処理時間の情報を取得できる場合、携帯電話端末10から携帯電話端末101に信号を送りその返信の信号を受信するまでにかかった時間から携帯電話端末101での信号の処理時間を減算することで、信号の往復にかかる時間を算出することができ、往復の時間から距離L1を算出することができる。なお、この場合は、時刻の同期は必要ない。
【0043】
次に、距離L2の検出方法について説明する。携帯電話端末10は、通信部16を用いた基地局4との通信で上述した距離L1を算出した方法と同様の処理のいずれかを実行し、距離L2を算出する。
【0044】
また、距離L3の検出方法について説明する。携帯電話端末10は、近距離通信部24または通信部16で携帯電話端末101と通信して距離L3の情報を取得する。この場合、携帯電話端末101は、通信部16を用いた基地局4との通信で上述した距離L1を算出した方法と同様の処理のいずれかを実行し、距離L3を算出し、算出した距離L3の情報を近距離通信部24または通信部16で携帯電話端末10に送る。
【0045】
また、他の算出方法としては、携帯電話端末10は、時刻を同期した状態で携帯電話端末101が基地局4からの任意の信号(報知情報等)を受信した時刻の情報を取得する。携帯電話端末10は、携帯電話端末101から取得した時刻の情報と、自機が当該任意の信号を受信した時刻と、の時間差から携帯電話端末10と携帯電話端末101との距離の差分L4を算出する。その後、携帯電話端末10は、距離L2に距離L4を加算または減算することでも距離L3を算出することができる。
【0046】
次に、自機に対して基地局4がどの方向にあるかの方向情報の検出方法について説明する。携帯電話端末10は、GPS部26で自身の位置情報を算出し、基地局4の位置情報と比較することで、方向情報を算出することができる。なお、基地局4の位置情報は通信部16を介した通信で情報を取得すればよい。また、携帯電話端末10は、GPS部26で取得した情報に基づいて位置を算出することに限定されず、自身の位置情報を取得する種々の方法を用いることができる。例えば携帯電話端末10は、通信部16を介して、基準となる基地局を含む周囲の複数の基地局4と通信を行い、通信可能な複数の基地局4の位置情報と当該基地局4との距離を算出する。携帯電話端末10は、複数の基地局4の位置情報と当該基地局4との距離とで自身の位置を特定することができる。なお、方向情報は、所定の範囲での方向が検出できればよい。
【0047】
携帯電話端末10は、距離L1と距離L2と距離L3と方向情報とを用いて、対象の携帯電話端末101の位置情報を取得する。具体的には、携帯電話端末10は、図4に示すように、距離L1と距離L2と距離L3とを用いて基地局4と携帯電話端末10と携帯電話端末101とで構成される三角形の形状を算出し、当該三角形の携帯電話端末10の頂点の角θ1を算出する。携帯電話端末10は、方向情報に基づいて自機に対する基地局4の方向を特定し、その方向に対して角θ1となる2つの方向を特定する。その後、携帯電話端末10は、特定した2つの方向から距離L1離れた位置を携帯電話端末101がある予測位置として算出する。なお、2箇所の予測位置(2つの予測位置)のうち一方は、距離L1´と距離L3´と携帯電話端末101´で示すように実際には携帯電話端末101がない位置となる。なお、距離L3´は、距離L3と同一距離である。
【0048】
携帯電話端末10は、上記予測位置算出処理を行った後、図5の矢印60に示すように移動されたことを検出した場合、再度予測位置算出処理を行う。携帯電話端末10は、加速度センサ28で加速度を検出することで自機の移動を検出することができる。移動した携帯電話端末10aは、予測位置算出処理を行い、距離L1aと距離L2aと距離L3と方向情報とを算出する。ここで、携帯電話端末101は移動していないので移動した携帯電話端末10aが算出する距離L3は、移動前の携帯電話端末10が算出した距離L3と同一距離となる。
【0049】
携帯電話端末10aは、距離L1aと距離L2aと距離L3と方向情報とを用いて、対象の携帯電話端末101の位置情報を取得する。具体的には、携帯電話端末10は、図5に示すように、距離L1aと距離L2aと距離L3とを用いて基地局4と携帯電話端末10と携帯電話端末101とで構成される三角形の形状を算出し、当該三角形の携帯電話端末10の頂点の角θ2を算出する。携帯電話端末10は、方向情報に基づいて自機に対する基地局4の方向を特定し、その方向に対して角θ2となる2つの方向を特定する。その後、携帯電話端末10は、特定した2つの方向から距離L1a離れた位置を携帯電話端末101がある予測位置として算出する。
【0050】
ここで、携帯電話端末10aが検出した2箇所の予測位置のうち一方は、距離L1a´と距離L3a´携帯電話端末101a´で示すように実際には携帯電話端末101がない位置となる。なお、距離L3a´は、距離L3と同一距離である。これに対して、携帯電話端末10aが検出した2箇所の予測位置のうち他方は、携帯電話端末101が実際にある位置である。このため、携帯電話端末10の位置と、携帯電話端末10aの位置で検出したそれぞれ2箇所の予測位置のうち、実際に携帯電話端末101がある予測位置は絶対位置が変化せず、携帯電話端末101がない算出位置である携帯電話端末101´と携帯電話端末101a´とは異なる位置となる。
【0051】
以上の関係から携帯電話端末10aは、絶対位置が変化しない、つまり相対位置が自機の矢印60の移動に対応した距離変化した予測位置を携帯電話端末101の位置として特定する。携帯電話端末10aは、携帯電話端末101の位置を特定したら、携帯電話端末101の位置を示す矢印情報62を表示させる。
【0052】
以下、図6を用いて携帯電話端末10の処理動作について説明する。図6に示す処理手順は、探索プログラム19C、近距離通信プログラム9D、測距プログラム9Eが提供する機能に基づいて繰り返し実行される。より具体的には、近距離通信プログラム9Dが提供する機能(通信機能)、測距プログラム9Eが提供する機能(距離検出機能)等により取得した各種検出結果に基づいて、探索プログラム9Cが提供する機能(探索機能、位置検出機能)を実行し、対象の通信端末の位置を検出する。携帯電話端末10は、探索機能を起動する指示が入力された場合、図6に示す処理を行う。
【0053】
携帯電話端末10の主制御部20は、ステップS12として対象端末(対象の通信端末)を特定する。なお、携帯電話端末10は、上述したように特定の通信端末を対象の通信端末としても、探索を行っている間に検出された任意の通信端末を対象の通信端末としてもよい。主制御部20は、ステップS12で対象端末を特定したら、ステップS14として近距離通信を開始する。具体的には、近距離通信部24を起動し、通信可能な対象端末との通信を開始する。なお、主制御部20は、既に近距離通信機能が起動された対象端末を通信相手としても、自身で強制的に近距離通信機能を起動させた対象端末を通信相手としてもよい。
【0054】
主制御部20は、ステップS14で近距離通信を開始したら、ステップS16として条件の調整を行う。主制御部20は、例えば使用する電波の強度や周波数帯域、通信のタイミング、出力する信号の情報等の探索に用いる各種条件を設定する。主制御部20は、対象端末および基地局と通信を行い、これらの条件を設定する。また、主制御部20は、自機と対象端末と基地局との間で時刻を同期させる同期処理を行ってもよい。
【0055】
主制御部20は、ステップS16で条件の調整を行ったら、ステップS17として、対象端末との距離、つまり距離L1を算出する。また、主制御部20は、ステップS17で距離L1を算出したら、ステップS18として基地局の方向を検出、つまり方向情報を取得する。主制御部20は、ステップS18で方向情報を取得したら、ステップS20として基地局との距離、つまり距離L2を算出する。主制御部20は、ステップS20で距離L2を算出したら、ステップS22として、基地局と対象端末との距離、つまり距離L3を算出する。なお、距離L1、距離L2、距離L3、方向情報は、上述した各種方法で算出、検出する。また、ステップS17からステップS22までの処理は、処理の順番は特に限定されない。
【0056】
主制御部20は、ステップS22の処理を行ったら、ステップS24として2箇所の予測位置(2つの予測位置)を算出する。つまり、距離L1、距離L2、距離L3、方向情報に基づいて特定される2ヶ所の予測位置を算出する。
【0057】
主制御部20は、ステップS24の処理を行ったら、ステップS26として移動ありかを判定する。なお、移動しているかは加速度センサ28の検出結果から判定する。主制御部20は、ステップS26で移動していない(No)と判定した場合、ステップS26に進む。つまり、主制御部20は、移動ありと判定するまでステップS26の処理を繰り返す。
【0058】
主制御部20は、ステップS26で移動あり(Yes)と判定した場合、ステップS28として、予測位置算出処理を行う。なお、予測位置算出処理とは、ステップS17からステップS24までの処理である。主制御部20は、ステップS28で予測位置算出処理を行い移動後の2ヶ所の予測位置を算出したら、ステップS30として位置が変化(移動)しない予測位置を特定する。つまり、ステップS28で算出した2ヶ所の予測位置と、以前に算出した2ヶ所の予測位置とを比較し、絶対位置が変化していない予測位置を特定する。
【0059】
主制御部20は、ステップS30で位置が変化しない予測位置を特定したら、ステップS32として特定した位置を報知する。つまり、主制御部20は、ステップS30で特定した位置が変化しない予測位置を対象端末の位置として特定して利用者に報知する。なお報知の方法は特に限定されないが、タッチパネル12の表示部12Bに地図を表示させ当該地図上に特定した位置を表示させる方法や、表示部12Bに特定した位置に向かう矢印を表示させる方法や、レシーバ17から音声で特定した位置の情報、特定した位置と自身の位置との相対関係の情報、自身の位置から特定した位置への移動経路の情報等を出力してもよい。
【0060】
主制御部20は、ステップS32で報知を行ったら、ステップS34として終了かを判定する。主制御部20は、ステップS34で終了ではない(No)と判定した場合、ステップS26に進み、終了である(Yes)と判定した場合、本処理を終了する。
【0061】
このように、携帯電話端末10は、通信部16と近距離通信部24とを用いた通信により基地局4との相対関係を利用して対象の通信端末の位置を検出することで、対象の通信端末の位置を高い精度で検出することができる。つまり、携帯電話端末10は、複数の基地局との通信状態から対象の通信端末の位置を特定する場合よりも高い精度で位置を検出することができ、GPS機能が使用できない環境でも位置を検出することができる。具体的には、災害時に対象の通信端末が倒壊した建物の内部にありGPS機能を用いて位置を特定できない場合でも、携帯電話端末10の利用者は、対象の通信端末の位置を高い精度で検出することができる。これにより対象の通信端末を所持している利用者を救出できる可能性を高くすることができる。
【0062】
なお、上記実施形態の携帯電話端末10は、予測位置算出処理を複数回行い、2箇所の予測位置から携帯電話端末があると判定した1つの位置を特定、つまり携帯電話端末がないと判定した1つの予測位置を排除したがこれに限定されない。携帯電話端末10は、例えば、2箇所の予測位置をそのまま、対象の通信端末(携帯電話端末101)として特定し、報知してもよい。また、携帯電話端末10は、2箇所の予測位置と自機の位置とで形成される三角形を探索エリアとして報知してもよい。このように2箇所の予測位置やエリアとして報知することでも、利用者は捜索の範囲を狭くすることができる。また、移動して対象に近づくと距離が短くなりまたはエリアの面積が小さくなり、移動して対象から遠ざかると距離が長くなりまたはエリアの面積が大きくなるため、どちらが対象の通信端末がある位置かを利用者が簡単に識別することができる。また、上記実施形態では、第1距離、第2距離および第3距離で形成される三角形を用いたが、当該三角形のすべての角部に接触する円を用いてもよい。また、自身の位置と2箇所の予測位置とで形成される三角形のすべての角部に接触する円を用いてもよい。
【0063】
また、上記実施形態の携帯電話端末10は、自機と対象の通信端末と基地局4との夫々の間の距離を算出し位置を特定したが、基地局4に換えて他の種々の通信機器を基準通信端末として用いることができる。例えば、携帯電話端末10は、基地局4に換えて他の携帯電話端末を基準通信端末として用いることもできる。この場合、基準通信端末となる他の携帯電話端末は一定の場所から動かない状態とする。このように他の携帯電話端末を用いることでも、自機と対象の通信端末と他の携帯電話端末との夫々の間の距離を算出することで対称の通信端末の位置を特定することができる。また、他の携帯電話端末にも特定されず、相対的な方位の情報と信号の送受信ができ、所定の位置から動かない状態にできる通信端末であれば、種々の通信端末を基準通信端末として用いることができる。
【符号の説明】
【0064】
10 携帯電話端末
11 筐体
12 タッチパネル
12A タッチセンサ
12B 表示部
13 入力部
15 電源部
16 通信部
17 レシーバ
18 マイク
19 記憶部
19A メールプログラム
19B ブラウザプログラム
19C 探索プログラム
19D 近距離通信プログラム
19E 測距プログラム
19F 処理条件テーブル
20 主制御部
21 RAM
24 近距離通信部
26 GPS部
28 加速度センサ
30、32 ボタン
34 入力デバイス
【特許請求の範囲】
【請求項1】
自機と対象通信端末との相対位置情報を取得する携帯電子機器であって、
所定の位置で移動しない基準通信端末と通信する通信部と、
前記対象通信端末と通信可能な近距離通信部と、
自機の位置情報を取得する位置情報取得部と、
前記通信部で前記基準通信端末を介した通信または前記近距離通信部での通信により前記対象通信端末と当該基準通信端末との第1距離を算出し、前記通信部で前記基準通信端末と通信し、当該基準通信端末と自機との第2距離を算出し、前記近距離通信部での通信により前記対象通信端末と自機との第3距離を算出し、前記位置情報取得部で取得した位置情報と当該基準通信端末の位置情報に基づいて自機に対して当該基準通信端末がある方向を検出し、前記第1距離、前記第2距離および前記第3距離で形成される三角形あるいは当該三角形のすべての角部に接触する円のいずれか一方と、自機に対して当該基準通信端末がある方向と、に基づいて前記対象通信端末の位置を検出する予測位置算出処理を実行する制御部と、を有することを特徴とする携帯電子機器。
【請求項2】
前記基準通信端末は、基地局であることを特徴とする請求項1に記載の携帯電子機器。
【請求項3】
自機の移動を検出する移動検出部をさらに有し、
前記制御部は、前記移動検出部で自機の移動を検出したら、再度予測位置算出処理を実行することを特徴とする請求項1または2に記載の携帯電子機器。
【請求項4】
前記制御部は、前記予測位置算出処理で条件を満たす2箇所の予測位置を検出し、
自機が移動しても絶対位置が変化しない検出結果を前記対象通信端末の位置とすることを特徴とする請求項3に記載の携帯電子機器。
【請求項5】
前記移動検出部は、自機に作用する加速度を検出する加速度センサを含むことを特徴とする請求項3または4に記載の携帯電子機器。
【請求項6】
画像を表示する表示部をさらに有し、
前記制御部は、前記予測位置算出処理で条件を満たす2箇所の予測位置を前記対象通信端末の位置として検出し、自機と検出した2箇所の前記予測位置とで囲われる領域を前記表示部に表示することを特徴とする請求項1または2に記載の携帯電子機器。
【請求項7】
前記位置情報取得部は、GPS衛星から出力されるGPS信号に基づいて位置情報を取得することを特徴とする請求項1から6のいずれか一項に記載の携帯電子機器。
【請求項1】
自機と対象通信端末との相対位置情報を取得する携帯電子機器であって、
所定の位置で移動しない基準通信端末と通信する通信部と、
前記対象通信端末と通信可能な近距離通信部と、
自機の位置情報を取得する位置情報取得部と、
前記通信部で前記基準通信端末を介した通信または前記近距離通信部での通信により前記対象通信端末と当該基準通信端末との第1距離を算出し、前記通信部で前記基準通信端末と通信し、当該基準通信端末と自機との第2距離を算出し、前記近距離通信部での通信により前記対象通信端末と自機との第3距離を算出し、前記位置情報取得部で取得した位置情報と当該基準通信端末の位置情報に基づいて自機に対して当該基準通信端末がある方向を検出し、前記第1距離、前記第2距離および前記第3距離で形成される三角形あるいは当該三角形のすべての角部に接触する円のいずれか一方と、自機に対して当該基準通信端末がある方向と、に基づいて前記対象通信端末の位置を検出する予測位置算出処理を実行する制御部と、を有することを特徴とする携帯電子機器。
【請求項2】
前記基準通信端末は、基地局であることを特徴とする請求項1に記載の携帯電子機器。
【請求項3】
自機の移動を検出する移動検出部をさらに有し、
前記制御部は、前記移動検出部で自機の移動を検出したら、再度予測位置算出処理を実行することを特徴とする請求項1または2に記載の携帯電子機器。
【請求項4】
前記制御部は、前記予測位置算出処理で条件を満たす2箇所の予測位置を検出し、
自機が移動しても絶対位置が変化しない検出結果を前記対象通信端末の位置とすることを特徴とする請求項3に記載の携帯電子機器。
【請求項5】
前記移動検出部は、自機に作用する加速度を検出する加速度センサを含むことを特徴とする請求項3または4に記載の携帯電子機器。
【請求項6】
画像を表示する表示部をさらに有し、
前記制御部は、前記予測位置算出処理で条件を満たす2箇所の予測位置を前記対象通信端末の位置として検出し、自機と検出した2箇所の前記予測位置とで囲われる領域を前記表示部に表示することを特徴とする請求項1または2に記載の携帯電子機器。
【請求項7】
前記位置情報取得部は、GPS衛星から出力されるGPS信号に基づいて位置情報を取得することを特徴とする請求項1から6のいずれか一項に記載の携帯電子機器。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−229957(P2012−229957A)
【公開日】平成24年11月22日(2012.11.22)
【国際特許分類】
【出願番号】特願2011−97512(P2011−97512)
【出願日】平成23年4月25日(2011.4.25)
【出願人】(000006633)京セラ株式会社 (13,660)
【Fターム(参考)】
【公開日】平成24年11月22日(2012.11.22)
【国際特許分類】
【出願日】平成23年4月25日(2011.4.25)
【出願人】(000006633)京セラ株式会社 (13,660)
【Fターム(参考)】
[ Back to top ]