
摩擦抵抗低減装置及び移動体
【課題】従来の機体表面に簡単な装置を追加するだけで流体摩擦抵抗を大きく低減でき、大幅なエネルギー効率の改善が期待できる、新規な摩擦抵抗低減装置を提供する。
【解決手段】移動体外壁101の先端部分に、進行波を発生させるための振動体を付着させた。振動体は、流体の動粘度と、移動体の巡航速度と、流体の移動方向における移動体の長さに基づいて算出される周波数で振動する。このように移動体外壁101全体が振動することで、移動体外壁101を覆う流体は乱流から層流に変化し、流体摩擦が最大で約80%軽減できる。
【解決手段】移動体外壁101の先端部分に、進行波を発生させるための振動体を付着させた。振動体は、流体の動粘度と、移動体の巡航速度と、流体の移動方向における移動体の長さに基づいて算出される周波数で振動する。このように移動体外壁101全体が振動することで、移動体外壁101を覆う流体は乱流から層流に変化し、流体摩擦が最大で約80%軽減できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、摩擦抵抗低減装置及び移動体に関する。
より詳細には、航空機、高速列車、船舶等の高速移動体の表面に実装して、高速移動体の表面に接触する空気或は水等の流体との摩擦抵抗を低減し、推進力に要する燃料等のエネルギー消費を大幅に低減する、摩擦抵抗低減装置及びこれを備える移動体に関する。
【背景技術】
【0002】
周知のように、航空機、新幹線等の高速列車、そして船舶、また将来実現されるリニアモーターカー等の高速輸送機器は、旅客や貨物等の輸送対象を高速且つ大量に輸送するために、燃料や電力を大きく消費する。これら高速輸送機器を運用する企業体にとって、電力や燃料等のエネルギー消費を低減することは、当該企業体の利益率を向上するだけでなく、エネルギーの大部分を諸外国から輸入する我が国の負担を軽減するためにも、また環境負荷を低減するためにも極めて重要である。
高速輸送機器のエネルギー消費を低減するための試みは、あらゆる角度で研究され、技術が進化している。特に、近年では流体力学に基づく高速輸送機器の機体に接触する空気や水等の流体との摩擦抵抗を低減させるための研究が盛んである。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】「大規模乱れの制御による壁面乱流摩擦抵抗低減効果に対する検討」小林、笠木 日本流体力学会2007[2010年2月24日検索]、インターネット<URL:http://www.thtlab.t.u-tokyo.ac.jp/Doc/kobayashi-jsfm07.pdf>
【非特許文献2】「Sustained sub-laminar drag in a fully developed channel flow」TAEGEE MIN, SUNG MOON KANG, JASON L. SPEYER AND JOHN KIM J. Fluid Mech. (2006), vol. 558, pp. 309-318. 2006 Cambridge University Press[2010年3月8日検索]インターネット<http://turb.seas.ucla.edu/~jkim/papers/jfm-558-2006.pdf>
【非特許文献3】「Effect of streamwise-periodic wall transpiration on turbulent friction drag」M. QUADRIO, J. M. FLORYAN2 AND P. LUCHINI J. Fluid Mech. (2007), vol. 576, pp. 425-444. 2007 Cambridge UniversityPress
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来、高速輸送機器の摩擦抵抗を低減する試みとしては、機体を流線型にする等の、古典的な流体摩擦の低減方法の他、機体表面に流体の流れに沿った筋状の凹凸を設ける等の、流体力学に基づく方法が提案されている。しかし、これらの方法は何れも改善効果に限界があることが知られている。
【0005】
また、非特許文献1には壁面近傍の壁垂直速度を打ち消す吹出・吸込を用いた制御により、壁面摩擦抵抗係数を最大で43%低減する効果を得る技術内容が開示されている。しかし、流体を吹出及び吸込する機器の設置コストや重量が無視できない。
非特許文献2には、壁面に流体の流れ方向に逆らう進行波を発生させ、最大24%の動力削減率(削減された動力エネルギーを削減前の動力エネルギーで割った値)を達成する技術内容が開示されている。
非特許文献3には、壁面に定在波を発生させ、最大13%(発明者の数値シミュレーション結果による)の摩擦抵抗低減率を達成する技術内容が開示されている(動力削減率はさらに小さい)。
これら従来技術は、いずれも動力削減率が小さい。
【0006】
本発明は係る課題を解決し、従来の機体表面に簡単な装置を追加するだけで流体摩擦抵抗を大きく低減でき、大幅なエネルギー効率の改善が期待できる、新規な摩擦抵抗低減装置と、これを備える移動体を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明の摩擦抵抗低減装置は、移動体を覆う移動体外壁と、移動体外壁の、移動体の進行方向前方に設けられ、移動体外壁に移動体の進行方向に沿う進行波を発生させるための振動体と、振動体を、移動体外壁に接触する流体の動粘度と、移動体の巡航速度と、移動体の進行方向の長さに基づく周波数の交流電圧を発生させる交流電源とを具備する。
【0008】
移動体の機体表面に、流体の流れ方向に沿う進行波を発生させる。進行波の波長は、流体の動粘度と、移動体の速度と、流体の移動方向における移動体の長さに依存する。移動体の機体表面に適切に発生した進行波は、流体と機体表面との間に発生する乱流に規則的な振動を与えることで、層流化が起き、流体摩擦が低減される。
【発明の効果】
【0009】
本発明により、従来の機体表面に簡単な装置を追加するだけで流体摩擦抵抗を大きく低減でき、大幅なエネルギー効率の改善が機体できる、新規な摩擦抵抗低減装置及び移動体を提供できる。
【図面の簡単な説明】
【0010】
【図1】本発明の実施形態である移動体外壁を概略的に説明する斜視図と横断面図である。
【図2】進行波を形成する理論モデルと、現実的な移動体外壁における進行波形成の仕組みを説明する概略図である。
【図3】本実施形態の移動体外壁を実装する航空機の、移動体外壁を裏側から見た図である。
【図4】本実施形態の移動体外壁を実装する航空機の外観図である。
【図5】本実施形態の移動体外壁を実装する船舶の外観図及び一部拡大図である。
【図6】DNSの結果を示すグラフである。
【図7】進行波発生装置のブロック図である。
【発明を実施するための形態】
【0011】
[摩擦抵抗低減装置の原理と適用例]
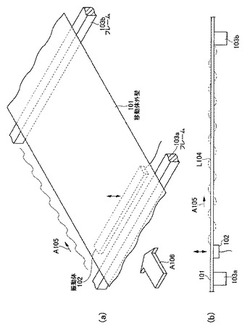
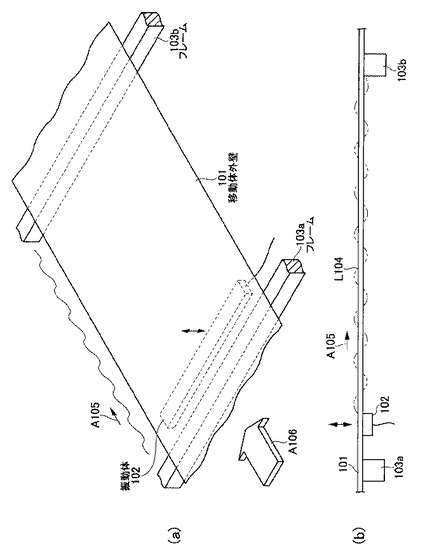
図1(a)及び(b)は、本発明の実施形態である、摩擦抵抗低減装置ともいえる移動体外壁を概略的に説明する斜視図と横断面図である。
図1(a)は、移動体外壁の斜視図である。
移動体外壁101はフレーム103aとフレーム103bによって支持されている。流体は移動体外壁101の表面を矢印A106方向に流れる。移動体外壁101の、流体に接触しない裏側には、振動体102がフレーム103aに近接して貼り付けられている。
振動体102は、図示しない交流電源から送電される交流電圧を受けて、交流電源の周波数で振動する。振動体102は所定の特性が得られればよいが、後述する理由により、現在一般的に入手可能な素子としては圧電型が最も好ましいと思われる。
【0012】
図1(b)は、移動体外壁101を横から見た断面図である。
移動体外壁101は、裏面にフレーム103aとフレーム103bで支持されている。振動体102は移動体外壁101の、フレーム103aから離れた位置に貼り付けられる。移動体外壁101の一端がフレーム103aに固着されているので、移動体外壁101はこのフレーム103の箇所を支点として、振動体102によって振動させられる。すると、移動体外壁101には点線L104に示すように進行波が発生し、進行波は矢印A105に示す方向に進む。これに対し、図示しない流体は移動体外壁101の表面を矢印A106の方向に流れる。
【0013】
進行波の波長は、流体の動粘度と、移動体の速度と、流体の移動方向における移動体の長さに依存する。移動体の機体表面に適切に発生した進行波は、流体と機体表面との間に発生する乱流に規則的な振動を与えることで、層流化が起き、流体摩擦が低減される。
【0014】
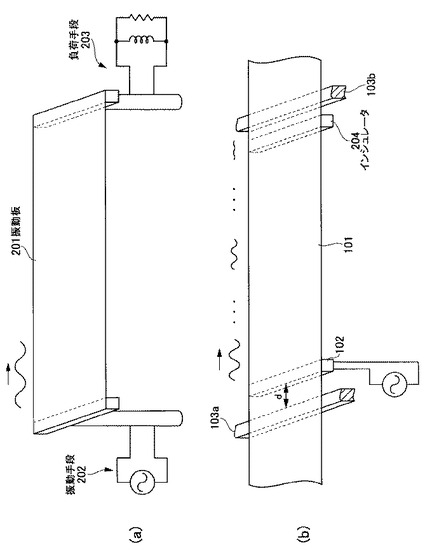
図2(a)及び(b)は、進行波を形成する理論モデルと、現実的な移動体外壁101における進行波形成の仕組みを説明する概略図である。
一般的に、進行波を形成する理論モデルとしては、図2(a)に示す図が用いられる。振動板201の一端には進行波を発生するための振動手段202が設けられ、振動板201の他端には反射波を抑制するための負荷手段203が設けられる。
本発明は、移動体外壁101に流体の流れに沿う進行波を発生させることである。移動体外壁101は図2(a)のような理論モデルと同等ではない。実際の移動体外壁101は、例えば航空機であればフレームにジュラルミン等の金属板が張り付けられている。このため、現実的には流体の進行方向から見て手前側に位置するフレームの近傍に振動手段である振動体102をフレームに沿って張り付ける。また、反射波は移動体外壁101自体の弾性抵抗によって進行波が自然減衰することを期待するか、或は図2(b)に示すように、流体の進行方向から見て向こう側に位置するフレーム103の近傍に、反射波を減衰させるためのゴム等の防振部材(以下「インシュレータ」)204を付着させる。
但し、フレームが流体の流れる方向にのみ移動体外壁101を固定する構成であるか、フレームの剛性が移動体外壁101上の進行波の通過を許容する等、反射波が生じ得ないのであれば、上述のようなインシュレータ204を設ける必要はない。
【0015】
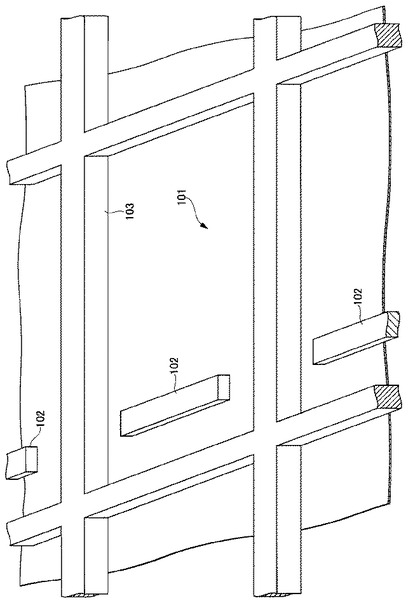
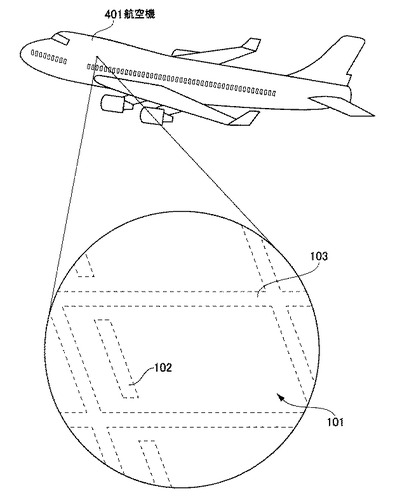
図3は、本実施形態の移動体外壁101を実装する航空機の、移動体外壁101を裏側から見た図である。
図4は、本実施形態の移動体外壁101を実装する航空機の外観図である。
航空機401に移動体外壁101を適用する場合、機体の剛性と軽量化を両立させるために、移動体外壁101の縦横にフレーム103が固定される構造を採用している。したがって、移動体外壁101の、フレーム103で囲まれている区画の「列」毎に、図1及び図2(b)のように振動体102を張り付ける。また、フレーム103が反射波を生じる場合は、反射波を防ぐためのインシュレータ204も必要になる。
航空機401に本発明を適用する場合、図3に示す外壁構造を、両翼を含めた機体の外壁全体に設ける。
以上に述べた航空機401における移動体外壁101の構造は、そのまま新幹線等の高速列車にも適用される。
【0016】
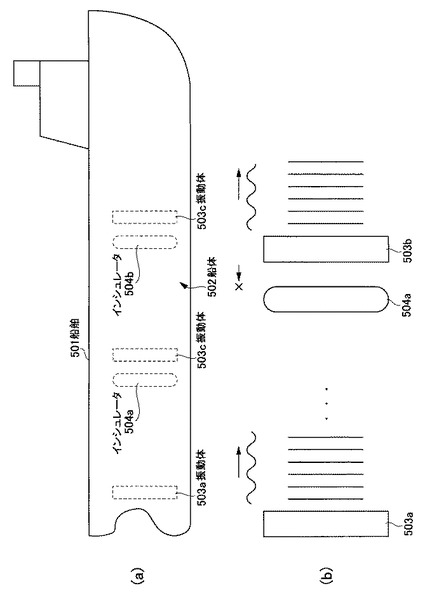
図5(a)及び(b)は、本実施形態の移動体外壁101を実装する船舶の外観図及び一部拡大図である。
船舶501に移動体外壁101を適用する場合、航空機401とは異なり船体502を構成する外壁が極めて堅牢であるため、船体502の先頭に振動体503aを設ければ、進行波が船体502の後方へ伝達する。しかし、進行波が船体502の途中で減衰する場合は、その減衰する箇所にインシュレータ504aで仕切って振動体503bを設ける必要が生じる。この場合のインシュレータ504aは、インシュレータ504aの側の、流体(水)の進行方向に設けられる振動体503bが生じる、流体の進行方向と逆方向の進行波を防ぐ役割も果たす。
【0017】
但し、タンカー等の、船体502の内部が隔壁で仕切られている船舶501の場合は、隔壁がフレーム103と同様の作用を奏する可能性がある。その際は、前述の図3及び図4に示したように、航空機401と同様に隔壁毎に振動体102と、必要に応じてインシュレータを設ける必要が生じる。
【0018】
航空機401や船舶501に本実施形態の移動体外壁101を適用する際の共通の事項として、振動体102が、移動体外壁101の、流体の進行方向に複数設けられる場合、複数の振動体102が生成する進行波同士の位相が合致していることが望ましい。位相が合致していないと、流体の進行方向の前段に位置する振動体102が移動体外壁101に生成した進行波に基づく流体の影響を、後段の振動体102が打ち消してしまう虞があるからである。位相を合致させるためには、電気的に位相を補正する他、振動体102のフレーム103からの距離を調整する方法もある。
【0019】
以上、図1乃至図5で説明したように、本発明は移動体の外壁全体に、流体の進行方向に沿う進行波を発生させることである。そしてそのために、移動体外壁の、移動体の先端或は前方部分から進行波を発生させるための振動体を設ける。振動体が発する進行波がフレームや隔壁によって反射し、反射波が発生してしまう場合は、これを防ぐためのインシュレータを設ける。振動体が発する進行波が移動体外壁の途中で減衰してしまう場合は、減衰した箇所から新たに振動体を設ける。その際、新たに設けた振動体が流体の進行方向と逆方向の進行波の発生を防ぐために、インシュレータを設ける必要が生じる。
【0020】
振動体を設ける箇所は、振動体が発する振動が移動体の外壁全体を網羅するように設けられていることが望ましい。但し、費用対効果等の兼ね合いで、外壁の一部にのみ振動体を設ける構成であってもよい。特に、船舶の場合は、流体との摩擦抵抗が大きく発生する箇所が水との接触部分であることから、水と接触しない箇所に振動体を設ける必要はない。また、積荷の積載状態によっては水と接触しない箇所が大きくなる場合が考えられるので、そのような場合には水と接触する箇所の振動体のみ駆動する構成であってもよい。
【0021】
[進行波の演算]
移動体外壁101に進行波が発生している状態(進行波状壁面)は、以下の式で定義できる。
【0022】
【数1】

【0023】
上記(1)式のパラメータのうち、動力を削減する進行波を形成する上で重要な要素である、最大振幅a[m]、波長λ[m]、位相速度c[m/s]の最適な値の範囲は、DNSより以下のように決定する。
【0024】
【数2】
【0025】
上記(2)式のパラメータのうち、動粘度ν及び流体密度ρは、対象の移動体周囲の流体が決まれば、流体の種類と温度、圧力等で一意に決まる。
壁面摩擦応力τwは、例えば以下の式で決定される。
【0026】
【数3】
【0027】
或は、より正確には、流れ方向の位置xに応じてτwは変化するので、以下の式で詳細に決定することもできる。
【0028】
【数4】
【0029】
先ず、移動体の流れ方向長さLを得て、移動体の巡航速度Ulamを決定し、流体の動粘度νと流体の密度ρを算出する。次に、壁面摩擦応力τwを、上記(3)式或は(4)式で算出する。τwが得られれば、上記(2)式で最大振幅a[m]、波長λ[m]、位相速度c[m/s]を得ることができる。Lは不変であるから、ν、ρ及びUlamを固定にすれば、進行波の波長及び振幅は固定的な値になるので、振動体102及びこれに与える交流電源の周波数及び電圧等は一意に決まる。
波長λから周波数を算出するには、次の(5)式に示すように位相速度cを波長λで割って得る。
【0030】
【数5】
【0031】
以上の式をまとめると、周波数fは、移動体の進行方向の長さLから上記(3)式或は(4)式で壁面摩擦応力τwを得た後、動粘度ν、巡航速度Ulamに基づき、以下の式で得られる。
【0032】
【数6】
【0033】
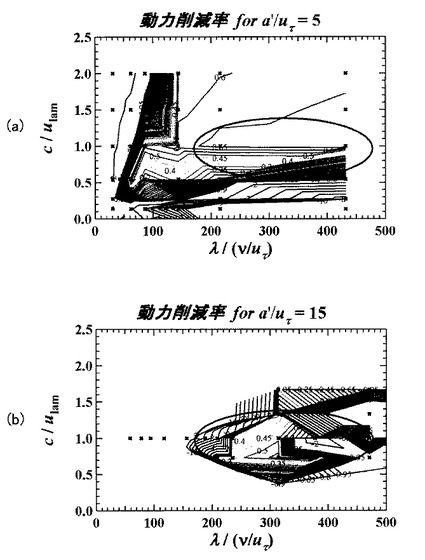
図6(a)及び(b)は、DNSの結果を示すグラフである。振幅a、波長λ、位相速度cの全ての要素を可変にしてグラフを得るのは困難であるので、予め壁面速度の振幅a’(=2πa・c/λ)について二つの値を決めておき、波長λと位相速度cを変化させた場合の、動力削減率を等値線でグラフにした。
図6(a)は、a’/uτを「5」とした場合、図6(b)はa’/uτを「15」とした場合である。何れのグラフも、楕円で示した領域で動力削減率が最大で80%の効果を得られることが判った。この範囲では、壁面変位の振幅aは3〜10ν/uτとなる。
前述の式(2)は、図6(a)及び(b)より導き出された。
【0034】
一例として、実際の移動体に本発明を適用する場合の演算結果を記す。航空機として、ボーイング777−300の場合を記す。
進行波のパラメータは、波長λ:1.7mm,最大振幅a:28μm,周波数f:150kHzとなった。人間には聞こえない周波数であり、既存の積層型圧電素子で出せる範囲である。
実現するための材料としては、厚さ14μmのジュラルミンや厚さ44μmのアルミニウムなどが好適であると算出できた。勿論、材料毎に最適な厚みは変わる。なお、現在の航空機材料は普通のジュラルミンよりもう少し強度があるので厚さが減少すると思われる。
【0035】
航空機であっても船舶であっても、振動体102は超音波領域で微小振動を行う。したがって、このような駆動を実現する手段としては、電磁式のアクチュエータよりも、積層型圧電素子の方が好適であると思われる。
【0036】
以上説明したように、移動体外壁101に振動体102を取り付け、振動体102を所定の周波数の交流電力で駆動させる。交流電力の周波数は上述の演算式に基づき、移動体の巡航速度と、流体の動粘度と、流体の移動方向における移動体の長さに基づいて算出できる。このようにして周波数を決定した交流電力で振動体102を駆動すると、移動体外壁101に摩擦抵抗低減効果が生じる。
【0037】
本実施形態は、以下のような応用例が考えられる。
(1)前述の通り、移動体外壁101に発生させる進行波の波長は、流体の動粘度と、移動体の速度と、流体の移動方向における移動体の長さに依存し、前述の式で算出できる。この三つのパラメータのうち、流体の動粘度と移動体の長さは一定である。つまり、移動体の速度に応じて最適な波長の進行波を移動体外壁101に発生させることで、巡航速度移動時のみならず、加速時或は減速時であっても適切な進行波を移動体外壁101に発生させ、エネルギー効率を更に高めることが期待できる。
【0038】
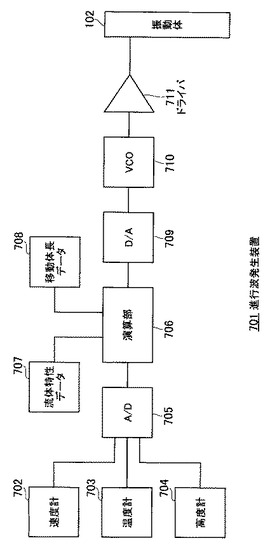
図7は、進行波発生装置のブロック図である。
進行波発生装置701は、周知のマイコンに周辺回路を追加して構成される。
速度計702は、移動体の移動速度を電圧信号として出力する。航空機であれば周知のピトー管センサである。速度計702は、進行波を算出するための要素である、移動体の速度情報を得るために設けられる。勿論、速度計702自体は輸送機であれば必ず装備されている。
【0039】
温度計703は周知のサーミスタ等の素子であり、温度を電圧信号として出力する。高度計704は航空機の場合にのみ用いられる。温度計703と高度計704は、進行波を算出するための要素である、流体の動粘度情報を算出するために用いられる。
A/D変換器705は、速度計702、温度計703及び高度計704の電圧をデジタルデータに変換する。
【0040】
なお、船舶の場合はGPSを用いて速度を算出していることが多く、また航空機もピトー管センサから得られる速度情報の誤差をGPSで補正することも行われていることから、速度計702及びA/D変換器705は移動体に元々設置されている速度計測手段からデータを得ることが望ましい。
【0041】
A/D変換器705が出力するデータはマイコンよりなる演算部706に入力される。演算部706には図示しないROMに格納された流体特性データ707及び移動体長データ708も入力される。演算部706は、温度計703と、航空機の場合は高度計704のデータと流体特性データ707のデータに基づいて動粘度を算出した後、速度計702のデータと移動体長データ708を用いて進行波の周波数を算出する。
【0042】
演算部706が算出した周波数データはD/A変換器709でアナログ電圧に変換され、VCO710に入力される。VCO710は入力電圧に従う周波数の信号を発生する。この信号はドライバ711で電力増幅され、振動体102を駆動する。
進行波発生装置701は、流体粘性データ及び移動体長データ708を変更すれば、移動体の種類を超えて適用できる。つまり、進行波発生装置701はROM内の流体特性データ707及び移動体長データ708を書き換えるだけで、船舶にも航空機にも列車にも応用できる。
【0043】
本実施形態では、移動体外壁101を開示した。
移動体外壁101の先端部分に、進行波を発生させるための振動体を付着させた。振動体は、流体の動粘度と、移動体の巡航速度と、流体の移動方向における移動体の長さに基づいて算出される周波数で振動する。このように移動体外壁101全体が振動することで、移動体外壁101を覆う流体は乱流から層流に変化し、流体摩擦が最大で約80%軽減できる。
【0044】
以上、本発明の実施形態例について説明したが、本発明は上記実施形態例に限定されるものではなく、特許請求の範囲に記載した本発明の要旨を逸脱しない限りにおいて、他の変形例、応用例を含む。
【符号の説明】
【0045】
101…移動体外壁、102…振動体、103…フレーム、103a…フレーム、103b…フレーム、201…振動板、202…振動手段、203…負荷手段、204…インシュレータ、401…航空機、501…船舶、502…船体、503a…振動体、503b…振動体、504a…インシュレータ、701…進行波発生装置、702…速度計、703…温度計、704…高度計、705…A/D変換器、706…演算部、707…流体特性データ、708…移動体長データ、709…D/A変換器、710…VCO、711…ドライバ
【技術分野】
【0001】
本発明は、摩擦抵抗低減装置及び移動体に関する。
より詳細には、航空機、高速列車、船舶等の高速移動体の表面に実装して、高速移動体の表面に接触する空気或は水等の流体との摩擦抵抗を低減し、推進力に要する燃料等のエネルギー消費を大幅に低減する、摩擦抵抗低減装置及びこれを備える移動体に関する。
【背景技術】
【0002】
周知のように、航空機、新幹線等の高速列車、そして船舶、また将来実現されるリニアモーターカー等の高速輸送機器は、旅客や貨物等の輸送対象を高速且つ大量に輸送するために、燃料や電力を大きく消費する。これら高速輸送機器を運用する企業体にとって、電力や燃料等のエネルギー消費を低減することは、当該企業体の利益率を向上するだけでなく、エネルギーの大部分を諸外国から輸入する我が国の負担を軽減するためにも、また環境負荷を低減するためにも極めて重要である。
高速輸送機器のエネルギー消費を低減するための試みは、あらゆる角度で研究され、技術が進化している。特に、近年では流体力学に基づく高速輸送機器の機体に接触する空気や水等の流体との摩擦抵抗を低減させるための研究が盛んである。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】「大規模乱れの制御による壁面乱流摩擦抵抗低減効果に対する検討」小林、笠木 日本流体力学会2007[2010年2月24日検索]、インターネット<URL:http://www.thtlab.t.u-tokyo.ac.jp/Doc/kobayashi-jsfm07.pdf>
【非特許文献2】「Sustained sub-laminar drag in a fully developed channel flow」TAEGEE MIN, SUNG MOON KANG, JASON L. SPEYER AND JOHN KIM J. Fluid Mech. (2006), vol. 558, pp. 309-318. 2006 Cambridge University Press[2010年3月8日検索]インターネット<http://turb.seas.ucla.edu/~jkim/papers/jfm-558-2006.pdf>
【非特許文献3】「Effect of streamwise-periodic wall transpiration on turbulent friction drag」M. QUADRIO, J. M. FLORYAN2 AND P. LUCHINI J. Fluid Mech. (2007), vol. 576, pp. 425-444. 2007 Cambridge UniversityPress
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来、高速輸送機器の摩擦抵抗を低減する試みとしては、機体を流線型にする等の、古典的な流体摩擦の低減方法の他、機体表面に流体の流れに沿った筋状の凹凸を設ける等の、流体力学に基づく方法が提案されている。しかし、これらの方法は何れも改善効果に限界があることが知られている。
【0005】
また、非特許文献1には壁面近傍の壁垂直速度を打ち消す吹出・吸込を用いた制御により、壁面摩擦抵抗係数を最大で43%低減する効果を得る技術内容が開示されている。しかし、流体を吹出及び吸込する機器の設置コストや重量が無視できない。
非特許文献2には、壁面に流体の流れ方向に逆らう進行波を発生させ、最大24%の動力削減率(削減された動力エネルギーを削減前の動力エネルギーで割った値)を達成する技術内容が開示されている。
非特許文献3には、壁面に定在波を発生させ、最大13%(発明者の数値シミュレーション結果による)の摩擦抵抗低減率を達成する技術内容が開示されている(動力削減率はさらに小さい)。
これら従来技術は、いずれも動力削減率が小さい。
【0006】
本発明は係る課題を解決し、従来の機体表面に簡単な装置を追加するだけで流体摩擦抵抗を大きく低減でき、大幅なエネルギー効率の改善が期待できる、新規な摩擦抵抗低減装置と、これを備える移動体を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明の摩擦抵抗低減装置は、移動体を覆う移動体外壁と、移動体外壁の、移動体の進行方向前方に設けられ、移動体外壁に移動体の進行方向に沿う進行波を発生させるための振動体と、振動体を、移動体外壁に接触する流体の動粘度と、移動体の巡航速度と、移動体の進行方向の長さに基づく周波数の交流電圧を発生させる交流電源とを具備する。
【0008】
移動体の機体表面に、流体の流れ方向に沿う進行波を発生させる。進行波の波長は、流体の動粘度と、移動体の速度と、流体の移動方向における移動体の長さに依存する。移動体の機体表面に適切に発生した進行波は、流体と機体表面との間に発生する乱流に規則的な振動を与えることで、層流化が起き、流体摩擦が低減される。
【発明の効果】
【0009】
本発明により、従来の機体表面に簡単な装置を追加するだけで流体摩擦抵抗を大きく低減でき、大幅なエネルギー効率の改善が機体できる、新規な摩擦抵抗低減装置及び移動体を提供できる。
【図面の簡単な説明】
【0010】
【図1】本発明の実施形態である移動体外壁を概略的に説明する斜視図と横断面図である。
【図2】進行波を形成する理論モデルと、現実的な移動体外壁における進行波形成の仕組みを説明する概略図である。
【図3】本実施形態の移動体外壁を実装する航空機の、移動体外壁を裏側から見た図である。
【図4】本実施形態の移動体外壁を実装する航空機の外観図である。
【図5】本実施形態の移動体外壁を実装する船舶の外観図及び一部拡大図である。
【図6】DNSの結果を示すグラフである。
【図7】進行波発生装置のブロック図である。
【発明を実施するための形態】
【0011】
[摩擦抵抗低減装置の原理と適用例]
図1(a)及び(b)は、本発明の実施形態である、摩擦抵抗低減装置ともいえる移動体外壁を概略的に説明する斜視図と横断面図である。
図1(a)は、移動体外壁の斜視図である。
移動体外壁101はフレーム103aとフレーム103bによって支持されている。流体は移動体外壁101の表面を矢印A106方向に流れる。移動体外壁101の、流体に接触しない裏側には、振動体102がフレーム103aに近接して貼り付けられている。
振動体102は、図示しない交流電源から送電される交流電圧を受けて、交流電源の周波数で振動する。振動体102は所定の特性が得られればよいが、後述する理由により、現在一般的に入手可能な素子としては圧電型が最も好ましいと思われる。
【0012】
図1(b)は、移動体外壁101を横から見た断面図である。
移動体外壁101は、裏面にフレーム103aとフレーム103bで支持されている。振動体102は移動体外壁101の、フレーム103aから離れた位置に貼り付けられる。移動体外壁101の一端がフレーム103aに固着されているので、移動体外壁101はこのフレーム103の箇所を支点として、振動体102によって振動させられる。すると、移動体外壁101には点線L104に示すように進行波が発生し、進行波は矢印A105に示す方向に進む。これに対し、図示しない流体は移動体外壁101の表面を矢印A106の方向に流れる。
【0013】
進行波の波長は、流体の動粘度と、移動体の速度と、流体の移動方向における移動体の長さに依存する。移動体の機体表面に適切に発生した進行波は、流体と機体表面との間に発生する乱流に規則的な振動を与えることで、層流化が起き、流体摩擦が低減される。
【0014】
図2(a)及び(b)は、進行波を形成する理論モデルと、現実的な移動体外壁101における進行波形成の仕組みを説明する概略図である。
一般的に、進行波を形成する理論モデルとしては、図2(a)に示す図が用いられる。振動板201の一端には進行波を発生するための振動手段202が設けられ、振動板201の他端には反射波を抑制するための負荷手段203が設けられる。
本発明は、移動体外壁101に流体の流れに沿う進行波を発生させることである。移動体外壁101は図2(a)のような理論モデルと同等ではない。実際の移動体外壁101は、例えば航空機であればフレームにジュラルミン等の金属板が張り付けられている。このため、現実的には流体の進行方向から見て手前側に位置するフレームの近傍に振動手段である振動体102をフレームに沿って張り付ける。また、反射波は移動体外壁101自体の弾性抵抗によって進行波が自然減衰することを期待するか、或は図2(b)に示すように、流体の進行方向から見て向こう側に位置するフレーム103の近傍に、反射波を減衰させるためのゴム等の防振部材(以下「インシュレータ」)204を付着させる。
但し、フレームが流体の流れる方向にのみ移動体外壁101を固定する構成であるか、フレームの剛性が移動体外壁101上の進行波の通過を許容する等、反射波が生じ得ないのであれば、上述のようなインシュレータ204を設ける必要はない。
【0015】
図3は、本実施形態の移動体外壁101を実装する航空機の、移動体外壁101を裏側から見た図である。
図4は、本実施形態の移動体外壁101を実装する航空機の外観図である。
航空機401に移動体外壁101を適用する場合、機体の剛性と軽量化を両立させるために、移動体外壁101の縦横にフレーム103が固定される構造を採用している。したがって、移動体外壁101の、フレーム103で囲まれている区画の「列」毎に、図1及び図2(b)のように振動体102を張り付ける。また、フレーム103が反射波を生じる場合は、反射波を防ぐためのインシュレータ204も必要になる。
航空機401に本発明を適用する場合、図3に示す外壁構造を、両翼を含めた機体の外壁全体に設ける。
以上に述べた航空機401における移動体外壁101の構造は、そのまま新幹線等の高速列車にも適用される。
【0016】
図5(a)及び(b)は、本実施形態の移動体外壁101を実装する船舶の外観図及び一部拡大図である。
船舶501に移動体外壁101を適用する場合、航空機401とは異なり船体502を構成する外壁が極めて堅牢であるため、船体502の先頭に振動体503aを設ければ、進行波が船体502の後方へ伝達する。しかし、進行波が船体502の途中で減衰する場合は、その減衰する箇所にインシュレータ504aで仕切って振動体503bを設ける必要が生じる。この場合のインシュレータ504aは、インシュレータ504aの側の、流体(水)の進行方向に設けられる振動体503bが生じる、流体の進行方向と逆方向の進行波を防ぐ役割も果たす。
【0017】
但し、タンカー等の、船体502の内部が隔壁で仕切られている船舶501の場合は、隔壁がフレーム103と同様の作用を奏する可能性がある。その際は、前述の図3及び図4に示したように、航空機401と同様に隔壁毎に振動体102と、必要に応じてインシュレータを設ける必要が生じる。
【0018】
航空機401や船舶501に本実施形態の移動体外壁101を適用する際の共通の事項として、振動体102が、移動体外壁101の、流体の進行方向に複数設けられる場合、複数の振動体102が生成する進行波同士の位相が合致していることが望ましい。位相が合致していないと、流体の進行方向の前段に位置する振動体102が移動体外壁101に生成した進行波に基づく流体の影響を、後段の振動体102が打ち消してしまう虞があるからである。位相を合致させるためには、電気的に位相を補正する他、振動体102のフレーム103からの距離を調整する方法もある。
【0019】
以上、図1乃至図5で説明したように、本発明は移動体の外壁全体に、流体の進行方向に沿う進行波を発生させることである。そしてそのために、移動体外壁の、移動体の先端或は前方部分から進行波を発生させるための振動体を設ける。振動体が発する進行波がフレームや隔壁によって反射し、反射波が発生してしまう場合は、これを防ぐためのインシュレータを設ける。振動体が発する進行波が移動体外壁の途中で減衰してしまう場合は、減衰した箇所から新たに振動体を設ける。その際、新たに設けた振動体が流体の進行方向と逆方向の進行波の発生を防ぐために、インシュレータを設ける必要が生じる。
【0020】
振動体を設ける箇所は、振動体が発する振動が移動体の外壁全体を網羅するように設けられていることが望ましい。但し、費用対効果等の兼ね合いで、外壁の一部にのみ振動体を設ける構成であってもよい。特に、船舶の場合は、流体との摩擦抵抗が大きく発生する箇所が水との接触部分であることから、水と接触しない箇所に振動体を設ける必要はない。また、積荷の積載状態によっては水と接触しない箇所が大きくなる場合が考えられるので、そのような場合には水と接触する箇所の振動体のみ駆動する構成であってもよい。
【0021】
[進行波の演算]
移動体外壁101に進行波が発生している状態(進行波状壁面)は、以下の式で定義できる。
【0022】
【数1】
【0023】
上記(1)式のパラメータのうち、動力を削減する進行波を形成する上で重要な要素である、最大振幅a[m]、波長λ[m]、位相速度c[m/s]の最適な値の範囲は、DNSより以下のように決定する。
【0024】
【数2】
【0025】
上記(2)式のパラメータのうち、動粘度ν及び流体密度ρは、対象の移動体周囲の流体が決まれば、流体の種類と温度、圧力等で一意に決まる。
壁面摩擦応力τwは、例えば以下の式で決定される。
【0026】
【数3】
【0027】
或は、より正確には、流れ方向の位置xに応じてτwは変化するので、以下の式で詳細に決定することもできる。
【0028】
【数4】
【0029】
先ず、移動体の流れ方向長さLを得て、移動体の巡航速度Ulamを決定し、流体の動粘度νと流体の密度ρを算出する。次に、壁面摩擦応力τwを、上記(3)式或は(4)式で算出する。τwが得られれば、上記(2)式で最大振幅a[m]、波長λ[m]、位相速度c[m/s]を得ることができる。Lは不変であるから、ν、ρ及びUlamを固定にすれば、進行波の波長及び振幅は固定的な値になるので、振動体102及びこれに与える交流電源の周波数及び電圧等は一意に決まる。
波長λから周波数を算出するには、次の(5)式に示すように位相速度cを波長λで割って得る。
【0030】
【数5】
【0031】
以上の式をまとめると、周波数fは、移動体の進行方向の長さLから上記(3)式或は(4)式で壁面摩擦応力τwを得た後、動粘度ν、巡航速度Ulamに基づき、以下の式で得られる。
【0032】
【数6】
【0033】
図6(a)及び(b)は、DNSの結果を示すグラフである。振幅a、波長λ、位相速度cの全ての要素を可変にしてグラフを得るのは困難であるので、予め壁面速度の振幅a’(=2πa・c/λ)について二つの値を決めておき、波長λと位相速度cを変化させた場合の、動力削減率を等値線でグラフにした。
図6(a)は、a’/uτを「5」とした場合、図6(b)はa’/uτを「15」とした場合である。何れのグラフも、楕円で示した領域で動力削減率が最大で80%の効果を得られることが判った。この範囲では、壁面変位の振幅aは3〜10ν/uτとなる。
前述の式(2)は、図6(a)及び(b)より導き出された。
【0034】
一例として、実際の移動体に本発明を適用する場合の演算結果を記す。航空機として、ボーイング777−300の場合を記す。
進行波のパラメータは、波長λ:1.7mm,最大振幅a:28μm,周波数f:150kHzとなった。人間には聞こえない周波数であり、既存の積層型圧電素子で出せる範囲である。
実現するための材料としては、厚さ14μmのジュラルミンや厚さ44μmのアルミニウムなどが好適であると算出できた。勿論、材料毎に最適な厚みは変わる。なお、現在の航空機材料は普通のジュラルミンよりもう少し強度があるので厚さが減少すると思われる。
【0035】
航空機であっても船舶であっても、振動体102は超音波領域で微小振動を行う。したがって、このような駆動を実現する手段としては、電磁式のアクチュエータよりも、積層型圧電素子の方が好適であると思われる。
【0036】
以上説明したように、移動体外壁101に振動体102を取り付け、振動体102を所定の周波数の交流電力で駆動させる。交流電力の周波数は上述の演算式に基づき、移動体の巡航速度と、流体の動粘度と、流体の移動方向における移動体の長さに基づいて算出できる。このようにして周波数を決定した交流電力で振動体102を駆動すると、移動体外壁101に摩擦抵抗低減効果が生じる。
【0037】
本実施形態は、以下のような応用例が考えられる。
(1)前述の通り、移動体外壁101に発生させる進行波の波長は、流体の動粘度と、移動体の速度と、流体の移動方向における移動体の長さに依存し、前述の式で算出できる。この三つのパラメータのうち、流体の動粘度と移動体の長さは一定である。つまり、移動体の速度に応じて最適な波長の進行波を移動体外壁101に発生させることで、巡航速度移動時のみならず、加速時或は減速時であっても適切な進行波を移動体外壁101に発生させ、エネルギー効率を更に高めることが期待できる。
【0038】
図7は、進行波発生装置のブロック図である。
進行波発生装置701は、周知のマイコンに周辺回路を追加して構成される。
速度計702は、移動体の移動速度を電圧信号として出力する。航空機であれば周知のピトー管センサである。速度計702は、進行波を算出するための要素である、移動体の速度情報を得るために設けられる。勿論、速度計702自体は輸送機であれば必ず装備されている。
【0039】
温度計703は周知のサーミスタ等の素子であり、温度を電圧信号として出力する。高度計704は航空機の場合にのみ用いられる。温度計703と高度計704は、進行波を算出するための要素である、流体の動粘度情報を算出するために用いられる。
A/D変換器705は、速度計702、温度計703及び高度計704の電圧をデジタルデータに変換する。
【0040】
なお、船舶の場合はGPSを用いて速度を算出していることが多く、また航空機もピトー管センサから得られる速度情報の誤差をGPSで補正することも行われていることから、速度計702及びA/D変換器705は移動体に元々設置されている速度計測手段からデータを得ることが望ましい。
【0041】
A/D変換器705が出力するデータはマイコンよりなる演算部706に入力される。演算部706には図示しないROMに格納された流体特性データ707及び移動体長データ708も入力される。演算部706は、温度計703と、航空機の場合は高度計704のデータと流体特性データ707のデータに基づいて動粘度を算出した後、速度計702のデータと移動体長データ708を用いて進行波の周波数を算出する。
【0042】
演算部706が算出した周波数データはD/A変換器709でアナログ電圧に変換され、VCO710に入力される。VCO710は入力電圧に従う周波数の信号を発生する。この信号はドライバ711で電力増幅され、振動体102を駆動する。
進行波発生装置701は、流体粘性データ及び移動体長データ708を変更すれば、移動体の種類を超えて適用できる。つまり、進行波発生装置701はROM内の流体特性データ707及び移動体長データ708を書き換えるだけで、船舶にも航空機にも列車にも応用できる。
【0043】
本実施形態では、移動体外壁101を開示した。
移動体外壁101の先端部分に、進行波を発生させるための振動体を付着させた。振動体は、流体の動粘度と、移動体の巡航速度と、流体の移動方向における移動体の長さに基づいて算出される周波数で振動する。このように移動体外壁101全体が振動することで、移動体外壁101を覆う流体は乱流から層流に変化し、流体摩擦が最大で約80%軽減できる。
【0044】
以上、本発明の実施形態例について説明したが、本発明は上記実施形態例に限定されるものではなく、特許請求の範囲に記載した本発明の要旨を逸脱しない限りにおいて、他の変形例、応用例を含む。
【符号の説明】
【0045】
101…移動体外壁、102…振動体、103…フレーム、103a…フレーム、103b…フレーム、201…振動板、202…振動手段、203…負荷手段、204…インシュレータ、401…航空機、501…船舶、502…船体、503a…振動体、503b…振動体、504a…インシュレータ、701…進行波発生装置、702…速度計、703…温度計、704…高度計、705…A/D変換器、706…演算部、707…流体特性データ、708…移動体長データ、709…D/A変換器、710…VCO、711…ドライバ
【特許請求の範囲】
【請求項1】
移動体を覆う移動体外壁と、
前記移動体外壁の、前記移動体の進行方向前方に設けられ、前記移動体外壁に前記移動体の進行方向に沿う進行波を発生させるための振動体と、
前記振動体を、前記移動体外壁に接触する流体の動粘度νと、前記移動体の巡航速度Ulamと、前記移動体の進行方向の長さLに基づく周波数の交流電圧を発生させる交流電源と
を具備する摩擦抵抗低減装置。
【請求項2】
前記交流電源の周波数fは、前記移動体の進行方向の長さLから壁面摩擦応力τwを得て、前記動粘度ν、前記巡航速度Ulamから、
【数7】
で得られる、請求項1記載の摩擦抵抗低減装置。
【請求項3】
更に、
前記移動体外壁に発生させる前記進行波の最大振幅aを
【数8】
で得る、請求項2記載の摩擦抵抗低減装置。
【請求項4】
外壁と、
前記外壁の進行方向前方に設けられ、前記外壁に前記進行方向に沿う進行波を発生させるための振動体と、
前記振動体を、前記外壁に接触する流体の動粘度と、前記外壁の巡航速度と、前記外壁の進行方向の長さに基づく周波数の交流電圧を発生させる交流電源と
を具備し、前記外壁によって覆われる移動体。
【請求項1】
移動体を覆う移動体外壁と、
前記移動体外壁の、前記移動体の進行方向前方に設けられ、前記移動体外壁に前記移動体の進行方向に沿う進行波を発生させるための振動体と、
前記振動体を、前記移動体外壁に接触する流体の動粘度νと、前記移動体の巡航速度Ulamと、前記移動体の進行方向の長さLに基づく周波数の交流電圧を発生させる交流電源と
を具備する摩擦抵抗低減装置。
【請求項2】
前記交流電源の周波数fは、前記移動体の進行方向の長さLから壁面摩擦応力τwを得て、前記動粘度ν、前記巡航速度Ulamから、
【数7】
で得られる、請求項1記載の摩擦抵抗低減装置。
【請求項3】
更に、
前記移動体外壁に発生させる前記進行波の最大振幅aを
【数8】
で得る、請求項2記載の摩擦抵抗低減装置。
【請求項4】
外壁と、
前記外壁の進行方向前方に設けられ、前記外壁に前記進行方向に沿う進行波を発生させるための振動体と、
前記振動体を、前記外壁に接触する流体の動粘度と、前記外壁の巡航速度と、前記外壁の進行方向の長さに基づく周波数の交流電圧を発生させる交流電源と
を具備し、前記外壁によって覆われる移動体。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−185409(P2011−185409A)
【公開日】平成23年9月22日(2011.9.22)
【国際特許分類】
【出願番号】特願2010−53834(P2010−53834)
【出願日】平成22年3月10日(2010.3.10)
【出願人】(504132881)国立大学法人東京農工大学 (595)
【公開日】平成23年9月22日(2011.9.22)
【国際特許分類】
【出願日】平成22年3月10日(2010.3.10)
【出願人】(504132881)国立大学法人東京農工大学 (595)
[ Back to top ]