
撚糸機
【課題】外糸のバルーンを早期に形成させ、もって、運転開始直後に生成される合糸の品質を改善すると共に、運転開始直後の糸切れを防止する。
【解決手段】外糸Y2に対して張力を付与する張力付与装置5を設ける。張力付与装置5は、外糸Y2に対して付与する張力を変更可能に構成される。また、定常運転時に外糸Y2に対して付与される張力よりも小さい張力を、運転開始時から所定時間が経過するまでの間に外糸Y2に対して付与するように、張力付与装置5を制御する張力制御部51を設ける。
【解決手段】外糸Y2に対して張力を付与する張力付与装置5を設ける。張力付与装置5は、外糸Y2に対して付与する張力を変更可能に構成される。また、定常運転時に外糸Y2に対して付与される張力よりも小さい張力を、運転開始時から所定時間が経過するまでの間に外糸Y2に対して付与するように、張力付与装置5を制御する張力制御部51を設ける。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、二本の糸を撚り合わせる撚糸機に関する。
【背景技術】
【0002】
一般に、二本の糸を撚り合わせる撚糸機において、撚糸は次のように行われる。即ち、撚り合わせる二本の糸のうち一方の糸(以下、内糸と称する。)は、例えば円筒状のチーズ巻きに形成された給糸パッケージ(以下、内糸用給糸パッケージと称する。)から軸方向に向かって解舒される。他方の糸(以下、外糸と称する。)は、上記給糸パッケージから少し離れて支持される他の給糸パッケージ(以下、外糸用給糸パッケージと称する。)から解舒され、内糸に至るまでの糸道に配設された張力付与装置によって所定の張力を付与されつつ、上記内糸用給糸パッケージの外周側でバルーンを形成しながら内糸に対して撚り合わされる。
【0003】
この外糸のバルーンを内糸用給糸パッケージの外周側に形成するために、前記内糸用給糸パッケージの一端には、内糸用給糸パッケージの軸心に対して垂直な方向に外糸の糸道が形成されたスピンドルが設けられている。このスピンドルがモータによって回転することで、スピンドル内で送糸される外糸が内糸用給糸パッケージの軸を中心に振り回され、もって、上記外糸のバルーンが形成されるという仕組みである。
【0004】
以上の構成に加え、外糸が内糸用給糸パッケージに直接接触することがないよう、内糸用給糸パッケージのパッケージ径よりも大径の接触防止用リングが外糸の糸道と内糸用給糸パッケージの間に介装されている。
【0005】
以上の構成で、撚糸機の運転を開始するには、オペレータが外糸用給糸パッケージから外糸を解舒して、この外糸を前述した張力付与装置やスピンドル内の糸道、内糸と外糸が合流する糸ガイドに通した上で、内糸と外糸を巻取装置に導入する。このとき、外糸は、スピンドル内の糸道から上記の糸ガイドにかけて、所定の張力を伴った状態で上記の接触防止用リングに当接した状態としておく。そして、オペレータが、巻取装置による巻き取りとスピンドルの回転を同時に開始させ、スピンドルの回転数が所定の回転数に至る頃には、外糸は遠心力によって接触防止用リングから外周側へ離反して、所定径のバルーンが形成される。
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかし、上記の撚糸機によって生成された合糸のうち、運転開始直後に生成された合糸の品質について、また、運転開始直後の糸切れについて、ユーザーから不満の申出があった。そこで、本願発明者は、上記品質及び糸切れについて調査した結果、運転開始から相当の時間が経過するまで、外糸はバルーンを形成できておらず、外糸が接触防止用リングと擦れ合い続けていたことが判った。そして、鋭意研究の末、運転開始から相当の時間が経過するまで外糸がバルーンを形成できないのは、(a)スピンドルの回転数が所定の回転数に至るまでに相当の時間を要すること、(b)スピンドルの回転数が小さいうちは、外糸に作用する遠心力も小さく、外糸が自己に付与される張力に打ち勝ってバルーンを形成し始めることができないこと、(c)従来の撚糸機では、外糸に対して運転開始時から既に相当量の張力が付与されていたこと、の(a)〜(c)が強く影響していることを見出した。そして、上記(c)の相当量の張力は、バルーンが十分に形成されている定常運転時の状態を前提として設定された固定値であり、ある意味では合理的だった。
【0007】
本発明は斯かる諸点に鑑みてなされたものであり、その主な目的は、外糸のバルーンを早期に形成させ、もって、運転開始直後に生成される合糸の品質を改善すると共に、運転開始直後の糸切れを防止することにある。
【0008】
なお、特許文献1(特開2002−138331号公報)には、糸切れを起こさせないように糸のテンションを制御するテンション制御手段が開示されるが、このテンション制御手段は、上記特許文献1の段落番号0039に記載されている通り、積極回転フライヤなるものを導入したことによる弊害に対処するためのもののようである。本願と着目している対象が相当異なるが、特許文献1の技術情報は興味深いものである。
【課題を解決するための手段及び効果】
【0009】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0010】
本発明の観点によれば、駆動源によって回転させられるスピンドルによってバルーンが形成される外糸を内糸を供給するパッケージの外周側で送糸することによって、前記の内糸と外糸とを撚り合わせる、撚糸機は、以下のように構成される。前記撚糸機は、前記外糸に対して張力を付与する張力付与手段と、前記張力付与手段の作動を制御する張力制御手段と、を備える。前記張力付与手段は、前記外糸に対して付与する張力を変更可能に構成される。前記張力制御手段は、前記スピンドルの回転状態に応じて、前記外糸に対して付与する張力を変更するように前記張力付与手段の作動を制御する。前述したようにバルーンの形成と張力との関係に着目して本願発明者が想到した上記の構成によれば、外糸のバルーンの形成を制御できるようになる。
【0011】
上記の撚糸機は、更に、以下のように構成される。即ち、前記張力制御手段は、定常運転時に前記外糸に対して付与する張力よりも小さい張力を、前記スピンドルが回転を開始してから前記スピンドルの回転数が所定の回転数に達するまでの間に前記外糸に対して付与するように前記張力付与手段の作動を制御する。以上の構成によれば、外糸のバルーンが早期に形成され、もって、運転開始直後に生成される合糸の品質が改善されると共に、運転開始直後の糸切れも防止される。更に、前記外糸のバルーンが形成される前であっても、例えば前記内糸を供給するパッケージなどの他の部品に対して擦れ合う外糸の張力が小さいことから、この点においても、合糸の品質が改善されると共に、運転開始直後の糸切れが防止されると言及できる。
【0012】
上記の撚糸機は、更に、以下のように構成される。即ち、前記張力付与手段は、前記外糸が巻き掛けられ、この外糸が送糸されることによって従動回転させられる従動プーリと、この従動プーリの回転を抑制する回転抑制手段と、から構成される。以上の構成によれば、前記外糸の品質に配慮しつつ前記外糸に対して張力を付与する構成が実現される。
【0013】
上記の撚糸機は、更に、以下のように構成される。即ち、前記回転抑制手段は、前記従動プーリの回転を磁気摩擦によって抑制する電磁ブレーキである。以上の構成によれば、前記従動プーリの回転の抑制の強弱を容易に制御できる。更に言えば、磁気摩擦を利用する構成であるから摺動部を省略した構成が可能となり、もって、維持管理の負担が軽減されよう。
【0014】
上記の撚糸機は、更に、以下のように構成される。即ち、前記従動プーリは、この従動プーリに巻き掛けられた前記外糸が、異なる方向へ向かって、前記従動プーリの周方向に沿って交互に、押圧されるように構成される。以上の構成によれば、前記外糸が送糸されることによって従動回転させられる前記従動プーリが前記外糸との間の単なる接触抵抗で達成される構成と比較して、前記外糸の品質劣化を低減できる。
【0015】
上記の撚糸機は、更に、以下のように構成される。即ち、前記張力付与手段は、前記撚糸機の正面側に配設される。以上の構成によれば、前記張力付与手段を構成する前記従動プーリに対する前記外糸の巻き掛けの作業性が向上する。
【発明を実施するための最良の形態】
【0016】
以下、図面を参照しつつ、本発明の実施の形態を説明する。先ず、図1に基づいて、本発明の一実施形態に係る撚糸機の構成を概説する。図1は、本発明の一実施形態に係る撚糸機の構成概略図である。
【0017】
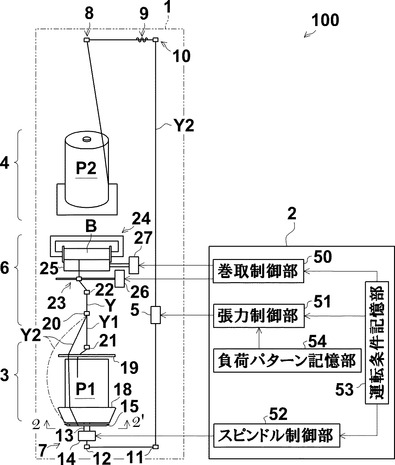
本実施形態に係る撚糸機100は、複数で列設される撚糸ユニット1と、この複数の撚糸ユニット1の作動を制御する機台制御装置2と、から構成される。撚糸ユニット1は、二本の糸を撚り合わせるものであって、図1には、複数の撚糸ユニット1のうち一の撚糸ユニット1のみが正面視で描かれている。
【0018】
撚糸ユニット1は、撚り合わせる二本の糸のうち一方の糸(以下、内糸Y1と称する。)を供給する給糸パッケージ(以下、内糸用給糸パッケージP1と称する。)を支持する内糸用給糸パッケージ支持部3と、他方の糸(以下、外糸Y2と称する。)を供給する給糸パッケージ(以下、外糸用給糸パッケージP2と称する。)を支持する外糸用給糸パッケージ支持部4と、外糸Y2に対して張力を付与する張力付与装置5(張力付与手段)と、内糸Y1と外糸Y2が撚り合わされた糸としての合糸Yを巻き取る巻取装置6と、を備える。そして、内糸用給糸パッケージ支持部3の外周側で外糸Y2のバルーンを形成するためのバルーン形成装置7が内糸用給糸パッケージ支持部3の上流側に同軸状に設けられる。以下、外糸Y2が外糸用給糸パッケージP2から送出されて巻取装置6に至るまでの糸道に沿って撚糸ユニット1の構成を更に説明する。
【0019】
外糸用給糸パッケージ支持部4に回転不能に支持される外糸用給糸パッケージP2から解舒された外糸Y2は、外糸Y2に対して若干の張力を付与する機能を有する第1糸ガイド8と、外糸Y2に対して所定の張力を付与するゲート式テンサー9と、第2糸ガイド10と、を順に介して上記の張力付与装置5に導入される。張力付与装置5の詳細な構成は、後述する。
【0020】
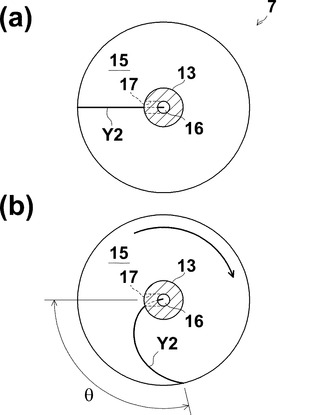
張力付与装置5によって好適な張力が付与された外糸Y2は、第3糸ガイド11と、第4糸ガイド12と、を順に介して鉛直方向に沿って吸い上げられるようにバルーン形成装置7に導入される。このバルーン形成装置7は、スピンドル13を出力軸とする電気モータ14と、このスピンドル13に対して回転不能に固定されるディスク15と、から構成される。ここで、図2を参照されたい。図2は、図1の2−2線矢視断面図である。図2(a)に示されるように、スピンドル13の軸心には外糸Y2が通過可能な糸道16が同軸状に形成されると共に、この糸道16から径方向へ延びる糸道17がディスク15の下面の直近に形成される。そして、第4糸ガイド12を介してスピンドル13の糸道16内に案内された外糸Y2は、糸道17を通ってスピンドル13の外部へ送出されると共に、図2(b)に示されるように、このディスク15がスピンドル13を介して電気モータ14によって回転させられることで、外糸Y2はディスク15の下面に沿って渦を描きながら振り回される。図2(b)の底面視において、糸道17から送出された外糸Y2が描く渦の角度は、一般に遅れ角θ[deg.]と称される。
【0021】
再度、図1を参照されたい。図1に示されるように、スピンドル13から送出された外糸Y2は、ディスク15の下面を這うように更に外周へ案内され、ディスク15の外周縁よりバルーン形成装置7を離れ、内糸用給糸パッケージ支持部3によって支持される内糸用給糸パッケージP1を避けるように案内されながら巻取装置6へ導かれる。
【0022】
ここで、内糸用給糸パッケージ支持部3の構成を簡単に説明する。内糸用給糸パッケージ支持部3は、前述のスピンドル13に対して図略のベアリングを介して軸支されると共に、内糸用給糸パッケージ支持部3の外周側へ配設される図略のマグネットとの磁気的な結合によって回転が規制される。内糸用給糸パッケージ支持部3は、内糸用給糸パッケージ支持部3に対して内糸用給糸パッケージP1が回転しないように内糸用給糸パッケージP1を支持すると共に、下方から送糸される外糸Y2が内糸用給糸パッケージP1に対して接触することのないよう、ディスク15に対して軸方向において下側に隣接するように、内糸用給糸パッケージP1より大径のハット18が設けられる。同様に、送糸される外糸Y2が内糸用給糸パッケージP1に対して接触することのないよう、ハット18と内糸用給糸パッケージP1を挟んで反対側に、ハット18と軸方向において対を成すように、ハット18と略同径のリング19が設けられる。リング19はハット18に取り付けられない。この構成で、バルーン形成装置7から離れた外糸Y2は、ハット18及びリング19との当接により内糸用給糸パッケージP1との離間距離が所定量以上確保され、もって、外糸Y2は、内糸用給糸パッケージP1を避けるように案内されながら巻取装置6の第5糸ガイド20へ導かれることとなる。
【0023】
一方、内糸用給糸パッケージP1から解舒された内糸Y1は、第6糸ガイド21によって軸心へ案内された後、上記の第5糸ガイド20へ案内される。
【0024】
次に、巻取装置6の構成を概説する。巻取装置6は、合糸Yの糸道に沿って順に、合糸Yの張力を所定量、低下させるための張力緩和部22と、合糸Yを巻取ボビンBに対して綾振るためのトラバース装置23と、巻取ボビンBを回転可能に支持するクレードル24と、クレードル24に支持された巻取ボビンBを回転させるための巻取ドラム25と、を備える。本実施形態においてトラバース装置23は、合糸Yを把持する略示のトラバースガイドが往復運動することで合糸Yを巻取ボビンBに対して綾振るように構成され、トラバースガイドを往復運動させるためのトラバースモータ26が設けられる。巻取ドラム25には、巻取ドラム25を所定回転数で回転させるための巻取ドラム用モータ27が設けられる。
【0025】
次に、図3及び図4に基づいて張力付与装置5の構成を説明する。図3及び図4を参照されたい。図3は、張力付与装置の斜視図である。図4は、従動プーリの外周の展開図及び断面図である。
【0026】
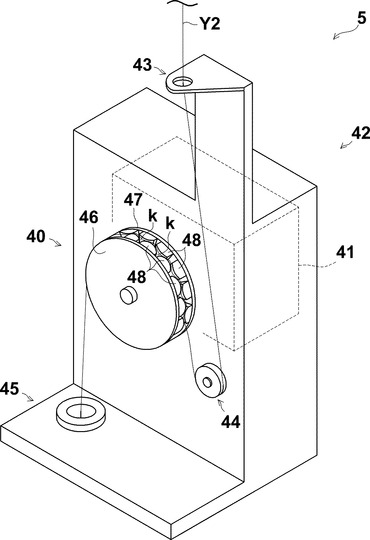
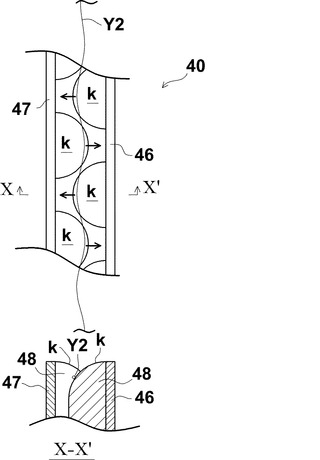
図3に示されるように、本実施形態に係る張力付与装置5は、外糸Y2が巻き掛けられ、この外糸Y2が送糸されることによって従動回転させられる従動プーリ40と、この従動プーリ40の回転を規制する略示のヒステリシスブレーキ41(回転抑制手段)と、を備える。本実施形態において従動プーリ40は外糸Y2に対して摺動不能に回転する。ヒステリシスブレーキ41は、従動プーリ40の回転を磁気摩擦によって抑制する電磁ブレーキの一種である。つまり、張力付与装置5は、このヒステリシスブレーキ41に入力する電流を増減することで、従動プーリ40の外周に巻き掛けられた外糸Y2に対して所望の張力を付与するように構成される。従動プーリ40が軸支される張力付与装置5の筐体42には、外糸Y2を張力付与装置5へ円滑に導入するための第7糸ガイド43が形成されると共に、従動プーリ40に対する外糸Y2の巻き付き角度を十分に確保するための補助プーリ44が従動プーリ40の近傍に軸支される。更に、外糸Y2が従動プーリ40の外周に巻き掛けられた状態を安定させるための第8糸ガイド45が筐体42の下部に形成される。
【0027】
本図に示されるように、従動プーリ40は、従動プーリ40の軸方向において対向する一対のディスク部材46、ディスク部材47と、この一対のディスク部材46、ディスク部材47の間に敷設される複数の当接部材48と、から構成される。各当接部材48には曲面kが形成される。上記当接部材48は、ディスク部材46のディスク部材47に対して対向する面に、曲面kがディスク部材47と対向するように、周方向に沿って所定の間隔で並設される。同様に、上記当接部材48は、ディスク部材47のディスク部材46に対して対向する面に、曲面kがディスク部材46と対向するように、周方向に沿って所定の間隔で並設される。そして、図4に示されるように、従動プーリ40の外周に巻き掛けられる外糸Y2の糸道に沿って言えば、ディスク部材46に対して着設される当接部材48と、ディスク部材47に対して着設される当接部材48と、が等ピッチで交互に出現する。即ち、従動プーリ40は、この従動プーリ40に巻き掛けられた外糸Y2が、異なる方向へ向かって、従動プーリ40の周方向に沿って交互に、押圧されるように構成される。なお、この押圧方向は、本図において太線矢印で図示される。なお、張力付与装置5は、撚糸機100のオペレータが外糸Y2を従動プーリ40へ巻き掛け易いように、撚糸ユニット1の正面側に露出して配設される。
【0028】
以上に、撚糸機100の機械的な構成を説明した。次に、撚糸機100の電気的な構成を説明する。
【0029】
図1に示されるように、機台制御装置2は、巻取装置6のトラバースモータ26及び巻取ドラム用モータ27の作動を制御する巻取制御部50と、張力付与装置5の作動を制御する張力制御部51(張力制御手段)と、電気モータ14の作動を制御するスピンドル制御部52と、各種の運転条件が記憶される運転条件記憶部53と、従動プーリの回転に対して負荷するトルクの負荷パターンが記憶される負荷パターン記憶部54と、から構成される。これらの機台制御装置2の構成は、例えばCPU(CentralProcessing Unit)やROM(Read Only Memory)、RAM(Random Access Memory)などにより実現される。負荷パターン記憶部54には、例えば図5(b1)、図6(b2)、図6(b3)に示されるような負荷パターンであって、具体的には時間とヒステリシスブレーキ41に入力する電流値の関係が記憶される。
【0030】
上記の巻取制御部50は、例えばキーボードなどの図略の入力手段を用いてオペレータが機台制御装置2に入力し、運転条件記憶部53に記憶された運転条件を適宜に参照し、参照した運転条件に基づいて巻取装置6を制御するように構成される。同様に、スピンドル制御部52は、上記運転条件記憶部53に記憶された運転条件を適宜に参照し、参照した運転条件に基づいて電気モータ14を制御するように構成される。
【0031】
張力制御部51は、前記スピンドル13の回転状態に応じて、前記外糸Y2に対して付与する張力を変更するように前記張力付与装置5の作動を制御する。詳しくは、張力制御部51は、上記運転条件記憶部53に記憶された運転条件を適宜に参照し、参照した運転条件に基づいて、負荷パターン記憶部54に複数記憶された負荷パターンのうち何れかを読み込み、読み込んだ負荷パターンに基づいて張力付与装置5の作動を制御するように構成される。
【0032】
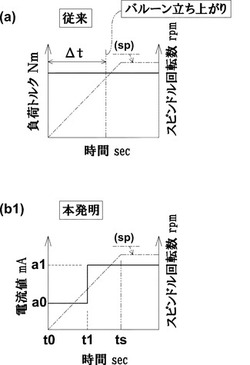
以上に、撚糸機100の電気的な構成を説明した。次に、図5及び図6に例示される各種の負荷パターンについて若干の説明を加える。図5及び図6は何れも、従動プーリの回転に負荷するトルクの負荷パターンを例示するグラフである。なお、各図において符号spは、スピンドル回転数に対応する例示の線を特定するものである。
【0033】
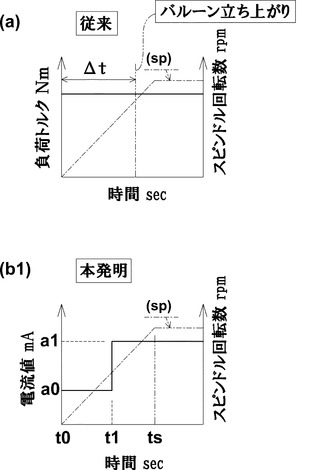
図5(a)に示される負荷パターンは、従来採用されてきたものであって、その特徴は、従動プーリに対する負荷が固定値である点である。従来は、スピンドル13が所定の回転数で等速回転し、外糸Y2のバルーンが形成されていることを前提とした上で、図2(b)に示される遅れ角θ[deg.]が概ね90〜270となるように負荷固定値を設定するに過ぎなかった。従って、従来、バルーンが立ち上がるまでに概ね時間Δtを要していた。
【0034】
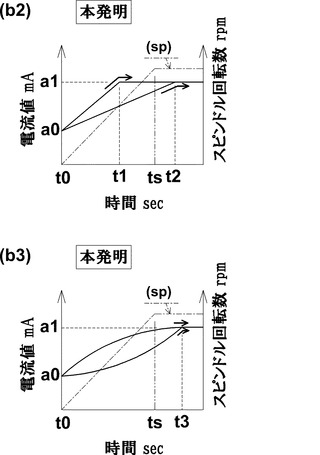
一方、図5(b1)及び図6(b2)、図6(b3)は、従来の負荷パターンを改良したものであって、その特徴は、定常運転時の負荷a1よりも小さい負荷a0を、スピンドル13の回転数が所定の回転数に達するまでの間に設けた点である。この狙いは、主として、バルーンの立ち上がりまでに要する時間の短縮することにある。図5(b1)に示される負荷パターン(以下、負荷パターンb1と称する。)では、スピンドル13が回転を開始する時刻t0から、スピンドル13の回転数が所定の回転数(本実施形態において「所定の回転数」は「定常運転時の回転数」であるとした。)に達する時刻tsまでの間に、定常運転時の負荷a1の半分以下である負荷a0を適用する時間域(t0〜t1)が設けられており、もって、負荷パターンb1は、ステップ状に増加する特徴を有する。図6(b2)に示される負荷パターン(以下、負荷パターンb2と称する。)は、スピンドル13が回転を開始する時刻t0から、スピンドル13の回転数が所定の回転数に達する時刻tsまでの間に、負荷が直線的に漸増する特徴を有する。図6(b2)には、負荷が直線的に漸増する負荷パターンb2として、2つのパターンを例示している。即ち、第一のパターンにおいては、スピンドル13が回転を開始する時刻t0から、スピンドル13の回転数が所定の回転数に達する時刻tsの少し手前である時刻t1までの間に、負荷が直線的に漸増する。第二のパターンにおいては、スピンドル13が回転を開始する時刻t0から、スピンドル13の回転数が所定の回転数に達する時刻tsの少し後である時刻t2までの間に、負荷が直線的に漸増する。図6(b3)に示される負荷パターン(以下、負荷パターンb3と称する。)は、スピンドル13が回転を開始する時刻t0から、スピンドル13の回転数が所定の回転数に達する時刻tsまでの間に、負荷の増加する割合が漸増又は漸減するように負荷が漸増する特徴を有する。図6(b3)には、負荷パターンb3として、2つのパターンを例示している。即ち、第三のパターンにおいては、スピンドル13が回転を開始する時刻t0から、スピンドル13の回転数が所定の回転数に達する時刻tsの少し後である時刻t3までの間に、負荷の増加する割合が漸減するように負荷が漸増する。第四のパターンにおいては、スピンドル13が回転を開始する時刻t0から、スピンドル13の回転数が所定の回転数に達する時刻tsの少し後である時刻t3までの間に、負荷の増加する割合が漸増するように負荷が漸増する。負荷パターンb3の上記第四のパターンに分類されるものとして、負荷が時間の二乗に比例するものが挙げられる。スピンドル13の回転数の上昇が時間に比例するものだとすると、外糸Y2に作用する遠心力がスピンドル13の回転数の二乗に比例することから、負荷が時間の二乗に比例する負荷パターンは、他の負荷パターンと比較してある種の優位性があるものと考えられる。なお、上記の初期の負荷a0は、外糸Y2の送糸の安定性のために設けられるものである。
【0035】
以上に、本実施形態に係る撚糸機100の構成を説明した。次に、この撚糸機100の作動を説明する。
【0036】
撚糸機100の運転を開始するには、先ず、内糸Y1と外糸Y2が図1において実線で示される糸道を形成するように、内糸Y1及び外糸Y2の糸通しを行う。このとき、トラバースモータ26、巻取ドラム用モータ27、電気モータ14は何れも静止状態とされる。外糸Y2は、図2(a)に示されるように糸道17からディスク15の下面に沿って径方向へ直線的に存在し、相当量の張力を伴って、図1に示されるようにディスク15の外周縁とハット18、リング19に当接した状態を保っている。
【0037】
次に、オペレータが、各種の運転条件を図略の入力手段を介して機台制御装置2へ入力する。入力された各種の運転条件は、運転条件記憶部53に記憶される。各種の運転条件としては、例えば、巻取装置6における巻取速度やトラバース装置23におけるトラバース速度、スピンドル13の回転数、糸種、糸太さなどが挙げられる。なお、内糸Y1や外糸Y2の送糸速度は巻取装置6の巻取速度によって律速されることとなる。
【0038】
運転条件記憶部53に記憶された各種の運転条件は、巻取制御部50、張力制御部51、スピンドル制御部52に適宜に読み込まれると共に、張力制御部51は、読み込んだ上記運転条件に基づいて負荷パターン記憶部54に記憶された複数の負荷パターンの中から最も適切な負荷パターンを読み込む。そして、巻取制御部50は上記運転条件に基づいて巻取装置6を制御することで合糸Yの巻き取りを開始し、スピンドル制御部52も同様に上記運転条件に基づいて電気モータ14を制御することでスピンドル13の回転を、この回転が所望の回転数に到達するまで例えば図5や図6に示されるように所定の角加速度において加速させる。それと同時に、張力制御部51は、読み込んだ負荷パターンに基づいて従動プーリ40の回転に対して負荷をかける。
【0039】
ところで、張力付与装置5において外糸Y2が従動プーリ40に対して摺動不能に巻き掛けられる態様は、以下のような作用によって実現される。即ち、複数の当接部材48の曲面kは従動プーリ40の軸心を含む切断面(図4下図を参照)において従動プーリ40の外周にV字状の溝を構成すると共に、異なる方向から、周方向に沿って交互に、外糸Y2に対して当接ないし押圧し、もって、外糸Y2は複数の当接部材48によってニップされ、従動プーリ40に対して摺動不能に巻き掛けられる態様が実現される。
【0040】
話を元に戻すと、スピンドル13の回転数が低い間は、外糸Y2は、ハット18やリング19に対して擦れ合いながら内糸用給糸パッケージ支持部3の外周を回転する。
【0041】
一方、スピンドル13の回転数が上昇し、外糸Y2に対して発生する遠心力に起因する外糸Y2の張力が、(1)外糸用給糸パッケージP2からの外糸Y2の解舒に伴い生じる張力である解舒張力や、(2)ゲート式テンサー9によって外糸Y2に対して付与される張力、(3)張力付与装置5によって外糸Y2に対して付与される張力、(4)第3糸ガイド11や第4糸ガイド12において外糸Y2に対して発生する張力、の(1)〜(4)などの合計値を上回ると、外糸Y2は、図1において鎖線で示されるようにハット18やリング19を離れて、ディスク15の外周縁と第5糸ガイド20との間で外周側へ膨出してバルーンを形成する。
【0042】
このときの遅れ角θ[deg.]は、図2(b)に示されるように、概ね90〜270とされる。外糸用給糸パッケージP2からの外糸Y2の解舒張力は、外糸用給糸パッケージP2の先端近傍から外糸Y2が解舒されるときと、外糸用給糸パッケージP2の基端近傍から外糸Y2が解舒されるときと、で大きく変動するものであるが、この解舒張力の変動は遅れ角θ[deg.]の増減によって相殺され、もって、外糸用給糸パッケージP2からの外糸Y2の解舒張力の大きな変動は、外糸Y2のバルーンには殆ど影響しないようになっている。
【0043】
そして、外糸Y2が内糸用給糸パッケージP1の外周で振り回されることで、第5糸ガイド20に至る直前において外糸Y2は内糸Y1と撚り合い合糸Yとされる。この撚り合った合糸状態を維持しながら張力緩和部22において張力が所定量、低減され、トラバース装置23において綾振られながら、巻取ボビンBに巻き取られる。
【0044】
以上に、本実施形態に係る撚糸機100の構成と作動を説明した。上記の撚糸機100が対象とする糸種は、例えば、ポリエステルやナイロン、レーヨン、アラミドなどが挙げられる。また、内糸用給糸パッケージP1や外糸用給糸パッケージP2の形状は、図1に示されるようなチーズ巻きの他に、例えば、コーン巻きやフランジ巻き、ボビン巻きであってもよい。
【0045】
以上説明したように本実施形態において、電気モータ14(駆動源)によって回転させられるスピンドル13によってバルーンが形成される外糸Y2を内糸Y1を供給するパッケージP1の外周側で送糸することによって、前記の内糸Y1と外糸Y2とを撚り合わせる、撚糸機100は、以下のように構成される。即ち、前記撚糸機100は、前記外糸Y2に対して張力を付与する張力付与装置5(張力付与手段)と、前記張力付与装置5の作動を制御する張力制御部51(張力制御手段)と、を備える。前記張力制御部51は、図5や図6に示されるように、前記スピンドル13の回転状態に応じて、前記外糸Y2に対して付与する張力を変更するように前記張力付与装置5の作動を制御する。前述したようにバルーンの形成と張力との関係に着目して本願発明者が想到した上記の構成によれば、外糸Y2のバルーンの形成を制御できるようになる。
【0046】
上記の撚糸機100は、更に、以下のように構成される。即ち、前記張力制御部51は、定常運転時に前記外糸Y2に対して付与する張力a1よりも小さい張力を、前記スピンドル13が回転を開始してから前記スピンドル13の回転数が所定の回転数に達するまでの間に前記外糸Y2に対して付与するように前記張力付与装置5の作動を制御する。以上の構成によれば、外糸Y2のバルーンが早期に形成され、もって、運転開始直後に生成される合糸Yの品質が改善されると共に、運転開始直後の糸切れも防止される。更に、前記外糸Y2のバルーンが形成される前であっても、例えば前記内糸Y1を供給する内糸用給糸パッケージP1などの他の部品に対して擦れ合う外糸Y2の張力が小さいことから、この点においても、合糸Yの品質が改善されると共に、運転開始直後の糸切れが防止されると言及できる。なお、上記実施形態では「所定の回転数」として、定常運転時におけるスピンドル13の回転数を一つの目安としている(図5及び図6参照)。また、上記「他の部品」とは、上記実施形態においては、主としてハット18やリング19が相当する。
【0047】
上記の撚糸機100は、更に、以下のように構成される。即ち、前記張力付与装置5は、前記外糸Y2が巻き掛けられ、この外糸Y2が送糸されることによって従動回転させられる従動プーリ40と、この従動プーリ40の回転を抑制する回転抑制手段(上記実施形態では、ヒステリシスブレーキ41)と、から構成される。以上の構成によれば、前記外糸Y2の品質に配慮しつつ前記外糸Y2に対して張力を付与する構成が実現される。
【0048】
上記実施形態では、回転抑制手段としてヒステリシスブレーキ41を例示したが、これに限られることなく、接触摩擦によるブレーキなども採用し得る。
【0049】
上記の撚糸機100は、更に、以下のように構成される。即ち、前記回転抑制手段は、前記従動プーリ40の回転を磁気摩擦によって抑制する電磁ブレーキ(上記実施形態では、ヒステリシスブレーキ41)である。以上の構成によれば、前記従動プーリ40の回転の抑制の強弱を容易に制御できる。更に言えば、磁気摩擦を利用する構成であるから摺動部を省略した構成が可能となり、もって、維持管理の負担が軽減されよう。
【0050】
上記の撚糸機100は、更に、以下のように構成される。即ち、前記従動プーリ40は、この従動プーリ40に巻き掛けられた前記外糸Y2が、異なる方向へ向かって、前記従動プーリ40の周方向に沿って交互に、押圧されるように構成される。以上の構成によれば、前記外糸Y2が送糸されることによって従動回転させられる前記従動プーリ40が前記外糸Y2との間の単なる接触抵抗で達成される構成と比較して、前記外糸Y2の品質劣化を低減できる。
【0051】
なお、上記実施形態においては、特殊な態様で配設された複数の当接部材48の曲面kによって上記のように外糸Y2が押圧される構成が実現されているが、この曲面kを平面に代えることは技術上、差し支えない。
【0052】
上記の撚糸機100は、更に、以下のように構成される。即ち、前記張力付与装置5は、前記撚糸機100の正面側に配設される。以上の構成によれば、前記張力付与装置5を構成する前記従動プーリ40に対する前記外糸Y2の巻き掛けの作業性が向上する。
【図面の簡単な説明】
【0053】
【図1】本発明の一実施形態に係る撚糸機の構成概略図
【図2】図1の2−2線矢視断面図
【図3】張力付与装置の斜視図
【図4】従動プーリの外周の展開図及び断面図
【図5】従動プーリの回転に負荷するトルクの負荷パターンを例示するグラフ
【図6】従動プーリの回転に負荷するトルクの負荷パターンを例示するグラフ
【符号の説明】
【0054】
1 撚糸ユニット
2 機台制御装置
5 張力付与装置
51 張力制御部
Y1 内糸
Y2 外糸
P1 内糸用給糸パッケージ
P2 外糸用給糸パッケージ
100 撚糸機
【技術分野】
【0001】
本発明は、二本の糸を撚り合わせる撚糸機に関する。
【背景技術】
【0002】
一般に、二本の糸を撚り合わせる撚糸機において、撚糸は次のように行われる。即ち、撚り合わせる二本の糸のうち一方の糸(以下、内糸と称する。)は、例えば円筒状のチーズ巻きに形成された給糸パッケージ(以下、内糸用給糸パッケージと称する。)から軸方向に向かって解舒される。他方の糸(以下、外糸と称する。)は、上記給糸パッケージから少し離れて支持される他の給糸パッケージ(以下、外糸用給糸パッケージと称する。)から解舒され、内糸に至るまでの糸道に配設された張力付与装置によって所定の張力を付与されつつ、上記内糸用給糸パッケージの外周側でバルーンを形成しながら内糸に対して撚り合わされる。
【0003】
この外糸のバルーンを内糸用給糸パッケージの外周側に形成するために、前記内糸用給糸パッケージの一端には、内糸用給糸パッケージの軸心に対して垂直な方向に外糸の糸道が形成されたスピンドルが設けられている。このスピンドルがモータによって回転することで、スピンドル内で送糸される外糸が内糸用給糸パッケージの軸を中心に振り回され、もって、上記外糸のバルーンが形成されるという仕組みである。
【0004】
以上の構成に加え、外糸が内糸用給糸パッケージに直接接触することがないよう、内糸用給糸パッケージのパッケージ径よりも大径の接触防止用リングが外糸の糸道と内糸用給糸パッケージの間に介装されている。
【0005】
以上の構成で、撚糸機の運転を開始するには、オペレータが外糸用給糸パッケージから外糸を解舒して、この外糸を前述した張力付与装置やスピンドル内の糸道、内糸と外糸が合流する糸ガイドに通した上で、内糸と外糸を巻取装置に導入する。このとき、外糸は、スピンドル内の糸道から上記の糸ガイドにかけて、所定の張力を伴った状態で上記の接触防止用リングに当接した状態としておく。そして、オペレータが、巻取装置による巻き取りとスピンドルの回転を同時に開始させ、スピンドルの回転数が所定の回転数に至る頃には、外糸は遠心力によって接触防止用リングから外周側へ離反して、所定径のバルーンが形成される。
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかし、上記の撚糸機によって生成された合糸のうち、運転開始直後に生成された合糸の品質について、また、運転開始直後の糸切れについて、ユーザーから不満の申出があった。そこで、本願発明者は、上記品質及び糸切れについて調査した結果、運転開始から相当の時間が経過するまで、外糸はバルーンを形成できておらず、外糸が接触防止用リングと擦れ合い続けていたことが判った。そして、鋭意研究の末、運転開始から相当の時間が経過するまで外糸がバルーンを形成できないのは、(a)スピンドルの回転数が所定の回転数に至るまでに相当の時間を要すること、(b)スピンドルの回転数が小さいうちは、外糸に作用する遠心力も小さく、外糸が自己に付与される張力に打ち勝ってバルーンを形成し始めることができないこと、(c)従来の撚糸機では、外糸に対して運転開始時から既に相当量の張力が付与されていたこと、の(a)〜(c)が強く影響していることを見出した。そして、上記(c)の相当量の張力は、バルーンが十分に形成されている定常運転時の状態を前提として設定された固定値であり、ある意味では合理的だった。
【0007】
本発明は斯かる諸点に鑑みてなされたものであり、その主な目的は、外糸のバルーンを早期に形成させ、もって、運転開始直後に生成される合糸の品質を改善すると共に、運転開始直後の糸切れを防止することにある。
【0008】
なお、特許文献1(特開2002−138331号公報)には、糸切れを起こさせないように糸のテンションを制御するテンション制御手段が開示されるが、このテンション制御手段は、上記特許文献1の段落番号0039に記載されている通り、積極回転フライヤなるものを導入したことによる弊害に対処するためのもののようである。本願と着目している対象が相当異なるが、特許文献1の技術情報は興味深いものである。
【課題を解決するための手段及び効果】
【0009】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0010】
本発明の観点によれば、駆動源によって回転させられるスピンドルによってバルーンが形成される外糸を内糸を供給するパッケージの外周側で送糸することによって、前記の内糸と外糸とを撚り合わせる、撚糸機は、以下のように構成される。前記撚糸機は、前記外糸に対して張力を付与する張力付与手段と、前記張力付与手段の作動を制御する張力制御手段と、を備える。前記張力付与手段は、前記外糸に対して付与する張力を変更可能に構成される。前記張力制御手段は、前記スピンドルの回転状態に応じて、前記外糸に対して付与する張力を変更するように前記張力付与手段の作動を制御する。前述したようにバルーンの形成と張力との関係に着目して本願発明者が想到した上記の構成によれば、外糸のバルーンの形成を制御できるようになる。
【0011】
上記の撚糸機は、更に、以下のように構成される。即ち、前記張力制御手段は、定常運転時に前記外糸に対して付与する張力よりも小さい張力を、前記スピンドルが回転を開始してから前記スピンドルの回転数が所定の回転数に達するまでの間に前記外糸に対して付与するように前記張力付与手段の作動を制御する。以上の構成によれば、外糸のバルーンが早期に形成され、もって、運転開始直後に生成される合糸の品質が改善されると共に、運転開始直後の糸切れも防止される。更に、前記外糸のバルーンが形成される前であっても、例えば前記内糸を供給するパッケージなどの他の部品に対して擦れ合う外糸の張力が小さいことから、この点においても、合糸の品質が改善されると共に、運転開始直後の糸切れが防止されると言及できる。
【0012】
上記の撚糸機は、更に、以下のように構成される。即ち、前記張力付与手段は、前記外糸が巻き掛けられ、この外糸が送糸されることによって従動回転させられる従動プーリと、この従動プーリの回転を抑制する回転抑制手段と、から構成される。以上の構成によれば、前記外糸の品質に配慮しつつ前記外糸に対して張力を付与する構成が実現される。
【0013】
上記の撚糸機は、更に、以下のように構成される。即ち、前記回転抑制手段は、前記従動プーリの回転を磁気摩擦によって抑制する電磁ブレーキである。以上の構成によれば、前記従動プーリの回転の抑制の強弱を容易に制御できる。更に言えば、磁気摩擦を利用する構成であるから摺動部を省略した構成が可能となり、もって、維持管理の負担が軽減されよう。
【0014】
上記の撚糸機は、更に、以下のように構成される。即ち、前記従動プーリは、この従動プーリに巻き掛けられた前記外糸が、異なる方向へ向かって、前記従動プーリの周方向に沿って交互に、押圧されるように構成される。以上の構成によれば、前記外糸が送糸されることによって従動回転させられる前記従動プーリが前記外糸との間の単なる接触抵抗で達成される構成と比較して、前記外糸の品質劣化を低減できる。
【0015】
上記の撚糸機は、更に、以下のように構成される。即ち、前記張力付与手段は、前記撚糸機の正面側に配設される。以上の構成によれば、前記張力付与手段を構成する前記従動プーリに対する前記外糸の巻き掛けの作業性が向上する。
【発明を実施するための最良の形態】
【0016】
以下、図面を参照しつつ、本発明の実施の形態を説明する。先ず、図1に基づいて、本発明の一実施形態に係る撚糸機の構成を概説する。図1は、本発明の一実施形態に係る撚糸機の構成概略図である。
【0017】
本実施形態に係る撚糸機100は、複数で列設される撚糸ユニット1と、この複数の撚糸ユニット1の作動を制御する機台制御装置2と、から構成される。撚糸ユニット1は、二本の糸を撚り合わせるものであって、図1には、複数の撚糸ユニット1のうち一の撚糸ユニット1のみが正面視で描かれている。
【0018】
撚糸ユニット1は、撚り合わせる二本の糸のうち一方の糸(以下、内糸Y1と称する。)を供給する給糸パッケージ(以下、内糸用給糸パッケージP1と称する。)を支持する内糸用給糸パッケージ支持部3と、他方の糸(以下、外糸Y2と称する。)を供給する給糸パッケージ(以下、外糸用給糸パッケージP2と称する。)を支持する外糸用給糸パッケージ支持部4と、外糸Y2に対して張力を付与する張力付与装置5(張力付与手段)と、内糸Y1と外糸Y2が撚り合わされた糸としての合糸Yを巻き取る巻取装置6と、を備える。そして、内糸用給糸パッケージ支持部3の外周側で外糸Y2のバルーンを形成するためのバルーン形成装置7が内糸用給糸パッケージ支持部3の上流側に同軸状に設けられる。以下、外糸Y2が外糸用給糸パッケージP2から送出されて巻取装置6に至るまでの糸道に沿って撚糸ユニット1の構成を更に説明する。
【0019】
外糸用給糸パッケージ支持部4に回転不能に支持される外糸用給糸パッケージP2から解舒された外糸Y2は、外糸Y2に対して若干の張力を付与する機能を有する第1糸ガイド8と、外糸Y2に対して所定の張力を付与するゲート式テンサー9と、第2糸ガイド10と、を順に介して上記の張力付与装置5に導入される。張力付与装置5の詳細な構成は、後述する。
【0020】
張力付与装置5によって好適な張力が付与された外糸Y2は、第3糸ガイド11と、第4糸ガイド12と、を順に介して鉛直方向に沿って吸い上げられるようにバルーン形成装置7に導入される。このバルーン形成装置7は、スピンドル13を出力軸とする電気モータ14と、このスピンドル13に対して回転不能に固定されるディスク15と、から構成される。ここで、図2を参照されたい。図2は、図1の2−2線矢視断面図である。図2(a)に示されるように、スピンドル13の軸心には外糸Y2が通過可能な糸道16が同軸状に形成されると共に、この糸道16から径方向へ延びる糸道17がディスク15の下面の直近に形成される。そして、第4糸ガイド12を介してスピンドル13の糸道16内に案内された外糸Y2は、糸道17を通ってスピンドル13の外部へ送出されると共に、図2(b)に示されるように、このディスク15がスピンドル13を介して電気モータ14によって回転させられることで、外糸Y2はディスク15の下面に沿って渦を描きながら振り回される。図2(b)の底面視において、糸道17から送出された外糸Y2が描く渦の角度は、一般に遅れ角θ[deg.]と称される。
【0021】
再度、図1を参照されたい。図1に示されるように、スピンドル13から送出された外糸Y2は、ディスク15の下面を這うように更に外周へ案内され、ディスク15の外周縁よりバルーン形成装置7を離れ、内糸用給糸パッケージ支持部3によって支持される内糸用給糸パッケージP1を避けるように案内されながら巻取装置6へ導かれる。
【0022】
ここで、内糸用給糸パッケージ支持部3の構成を簡単に説明する。内糸用給糸パッケージ支持部3は、前述のスピンドル13に対して図略のベアリングを介して軸支されると共に、内糸用給糸パッケージ支持部3の外周側へ配設される図略のマグネットとの磁気的な結合によって回転が規制される。内糸用給糸パッケージ支持部3は、内糸用給糸パッケージ支持部3に対して内糸用給糸パッケージP1が回転しないように内糸用給糸パッケージP1を支持すると共に、下方から送糸される外糸Y2が内糸用給糸パッケージP1に対して接触することのないよう、ディスク15に対して軸方向において下側に隣接するように、内糸用給糸パッケージP1より大径のハット18が設けられる。同様に、送糸される外糸Y2が内糸用給糸パッケージP1に対して接触することのないよう、ハット18と内糸用給糸パッケージP1を挟んで反対側に、ハット18と軸方向において対を成すように、ハット18と略同径のリング19が設けられる。リング19はハット18に取り付けられない。この構成で、バルーン形成装置7から離れた外糸Y2は、ハット18及びリング19との当接により内糸用給糸パッケージP1との離間距離が所定量以上確保され、もって、外糸Y2は、内糸用給糸パッケージP1を避けるように案内されながら巻取装置6の第5糸ガイド20へ導かれることとなる。
【0023】
一方、内糸用給糸パッケージP1から解舒された内糸Y1は、第6糸ガイド21によって軸心へ案内された後、上記の第5糸ガイド20へ案内される。
【0024】
次に、巻取装置6の構成を概説する。巻取装置6は、合糸Yの糸道に沿って順に、合糸Yの張力を所定量、低下させるための張力緩和部22と、合糸Yを巻取ボビンBに対して綾振るためのトラバース装置23と、巻取ボビンBを回転可能に支持するクレードル24と、クレードル24に支持された巻取ボビンBを回転させるための巻取ドラム25と、を備える。本実施形態においてトラバース装置23は、合糸Yを把持する略示のトラバースガイドが往復運動することで合糸Yを巻取ボビンBに対して綾振るように構成され、トラバースガイドを往復運動させるためのトラバースモータ26が設けられる。巻取ドラム25には、巻取ドラム25を所定回転数で回転させるための巻取ドラム用モータ27が設けられる。
【0025】
次に、図3及び図4に基づいて張力付与装置5の構成を説明する。図3及び図4を参照されたい。図3は、張力付与装置の斜視図である。図4は、従動プーリの外周の展開図及び断面図である。
【0026】
図3に示されるように、本実施形態に係る張力付与装置5は、外糸Y2が巻き掛けられ、この外糸Y2が送糸されることによって従動回転させられる従動プーリ40と、この従動プーリ40の回転を規制する略示のヒステリシスブレーキ41(回転抑制手段)と、を備える。本実施形態において従動プーリ40は外糸Y2に対して摺動不能に回転する。ヒステリシスブレーキ41は、従動プーリ40の回転を磁気摩擦によって抑制する電磁ブレーキの一種である。つまり、張力付与装置5は、このヒステリシスブレーキ41に入力する電流を増減することで、従動プーリ40の外周に巻き掛けられた外糸Y2に対して所望の張力を付与するように構成される。従動プーリ40が軸支される張力付与装置5の筐体42には、外糸Y2を張力付与装置5へ円滑に導入するための第7糸ガイド43が形成されると共に、従動プーリ40に対する外糸Y2の巻き付き角度を十分に確保するための補助プーリ44が従動プーリ40の近傍に軸支される。更に、外糸Y2が従動プーリ40の外周に巻き掛けられた状態を安定させるための第8糸ガイド45が筐体42の下部に形成される。
【0027】
本図に示されるように、従動プーリ40は、従動プーリ40の軸方向において対向する一対のディスク部材46、ディスク部材47と、この一対のディスク部材46、ディスク部材47の間に敷設される複数の当接部材48と、から構成される。各当接部材48には曲面kが形成される。上記当接部材48は、ディスク部材46のディスク部材47に対して対向する面に、曲面kがディスク部材47と対向するように、周方向に沿って所定の間隔で並設される。同様に、上記当接部材48は、ディスク部材47のディスク部材46に対して対向する面に、曲面kがディスク部材46と対向するように、周方向に沿って所定の間隔で並設される。そして、図4に示されるように、従動プーリ40の外周に巻き掛けられる外糸Y2の糸道に沿って言えば、ディスク部材46に対して着設される当接部材48と、ディスク部材47に対して着設される当接部材48と、が等ピッチで交互に出現する。即ち、従動プーリ40は、この従動プーリ40に巻き掛けられた外糸Y2が、異なる方向へ向かって、従動プーリ40の周方向に沿って交互に、押圧されるように構成される。なお、この押圧方向は、本図において太線矢印で図示される。なお、張力付与装置5は、撚糸機100のオペレータが外糸Y2を従動プーリ40へ巻き掛け易いように、撚糸ユニット1の正面側に露出して配設される。
【0028】
以上に、撚糸機100の機械的な構成を説明した。次に、撚糸機100の電気的な構成を説明する。
【0029】
図1に示されるように、機台制御装置2は、巻取装置6のトラバースモータ26及び巻取ドラム用モータ27の作動を制御する巻取制御部50と、張力付与装置5の作動を制御する張力制御部51(張力制御手段)と、電気モータ14の作動を制御するスピンドル制御部52と、各種の運転条件が記憶される運転条件記憶部53と、従動プーリの回転に対して負荷するトルクの負荷パターンが記憶される負荷パターン記憶部54と、から構成される。これらの機台制御装置2の構成は、例えばCPU(CentralProcessing Unit)やROM(Read Only Memory)、RAM(Random Access Memory)などにより実現される。負荷パターン記憶部54には、例えば図5(b1)、図6(b2)、図6(b3)に示されるような負荷パターンであって、具体的には時間とヒステリシスブレーキ41に入力する電流値の関係が記憶される。
【0030】
上記の巻取制御部50は、例えばキーボードなどの図略の入力手段を用いてオペレータが機台制御装置2に入力し、運転条件記憶部53に記憶された運転条件を適宜に参照し、参照した運転条件に基づいて巻取装置6を制御するように構成される。同様に、スピンドル制御部52は、上記運転条件記憶部53に記憶された運転条件を適宜に参照し、参照した運転条件に基づいて電気モータ14を制御するように構成される。
【0031】
張力制御部51は、前記スピンドル13の回転状態に応じて、前記外糸Y2に対して付与する張力を変更するように前記張力付与装置5の作動を制御する。詳しくは、張力制御部51は、上記運転条件記憶部53に記憶された運転条件を適宜に参照し、参照した運転条件に基づいて、負荷パターン記憶部54に複数記憶された負荷パターンのうち何れかを読み込み、読み込んだ負荷パターンに基づいて張力付与装置5の作動を制御するように構成される。
【0032】
以上に、撚糸機100の電気的な構成を説明した。次に、図5及び図6に例示される各種の負荷パターンについて若干の説明を加える。図5及び図6は何れも、従動プーリの回転に負荷するトルクの負荷パターンを例示するグラフである。なお、各図において符号spは、スピンドル回転数に対応する例示の線を特定するものである。
【0033】
図5(a)に示される負荷パターンは、従来採用されてきたものであって、その特徴は、従動プーリに対する負荷が固定値である点である。従来は、スピンドル13が所定の回転数で等速回転し、外糸Y2のバルーンが形成されていることを前提とした上で、図2(b)に示される遅れ角θ[deg.]が概ね90〜270となるように負荷固定値を設定するに過ぎなかった。従って、従来、バルーンが立ち上がるまでに概ね時間Δtを要していた。
【0034】
一方、図5(b1)及び図6(b2)、図6(b3)は、従来の負荷パターンを改良したものであって、その特徴は、定常運転時の負荷a1よりも小さい負荷a0を、スピンドル13の回転数が所定の回転数に達するまでの間に設けた点である。この狙いは、主として、バルーンの立ち上がりまでに要する時間の短縮することにある。図5(b1)に示される負荷パターン(以下、負荷パターンb1と称する。)では、スピンドル13が回転を開始する時刻t0から、スピンドル13の回転数が所定の回転数(本実施形態において「所定の回転数」は「定常運転時の回転数」であるとした。)に達する時刻tsまでの間に、定常運転時の負荷a1の半分以下である負荷a0を適用する時間域(t0〜t1)が設けられており、もって、負荷パターンb1は、ステップ状に増加する特徴を有する。図6(b2)に示される負荷パターン(以下、負荷パターンb2と称する。)は、スピンドル13が回転を開始する時刻t0から、スピンドル13の回転数が所定の回転数に達する時刻tsまでの間に、負荷が直線的に漸増する特徴を有する。図6(b2)には、負荷が直線的に漸増する負荷パターンb2として、2つのパターンを例示している。即ち、第一のパターンにおいては、スピンドル13が回転を開始する時刻t0から、スピンドル13の回転数が所定の回転数に達する時刻tsの少し手前である時刻t1までの間に、負荷が直線的に漸増する。第二のパターンにおいては、スピンドル13が回転を開始する時刻t0から、スピンドル13の回転数が所定の回転数に達する時刻tsの少し後である時刻t2までの間に、負荷が直線的に漸増する。図6(b3)に示される負荷パターン(以下、負荷パターンb3と称する。)は、スピンドル13が回転を開始する時刻t0から、スピンドル13の回転数が所定の回転数に達する時刻tsまでの間に、負荷の増加する割合が漸増又は漸減するように負荷が漸増する特徴を有する。図6(b3)には、負荷パターンb3として、2つのパターンを例示している。即ち、第三のパターンにおいては、スピンドル13が回転を開始する時刻t0から、スピンドル13の回転数が所定の回転数に達する時刻tsの少し後である時刻t3までの間に、負荷の増加する割合が漸減するように負荷が漸増する。第四のパターンにおいては、スピンドル13が回転を開始する時刻t0から、スピンドル13の回転数が所定の回転数に達する時刻tsの少し後である時刻t3までの間に、負荷の増加する割合が漸増するように負荷が漸増する。負荷パターンb3の上記第四のパターンに分類されるものとして、負荷が時間の二乗に比例するものが挙げられる。スピンドル13の回転数の上昇が時間に比例するものだとすると、外糸Y2に作用する遠心力がスピンドル13の回転数の二乗に比例することから、負荷が時間の二乗に比例する負荷パターンは、他の負荷パターンと比較してある種の優位性があるものと考えられる。なお、上記の初期の負荷a0は、外糸Y2の送糸の安定性のために設けられるものである。
【0035】
以上に、本実施形態に係る撚糸機100の構成を説明した。次に、この撚糸機100の作動を説明する。
【0036】
撚糸機100の運転を開始するには、先ず、内糸Y1と外糸Y2が図1において実線で示される糸道を形成するように、内糸Y1及び外糸Y2の糸通しを行う。このとき、トラバースモータ26、巻取ドラム用モータ27、電気モータ14は何れも静止状態とされる。外糸Y2は、図2(a)に示されるように糸道17からディスク15の下面に沿って径方向へ直線的に存在し、相当量の張力を伴って、図1に示されるようにディスク15の外周縁とハット18、リング19に当接した状態を保っている。
【0037】
次に、オペレータが、各種の運転条件を図略の入力手段を介して機台制御装置2へ入力する。入力された各種の運転条件は、運転条件記憶部53に記憶される。各種の運転条件としては、例えば、巻取装置6における巻取速度やトラバース装置23におけるトラバース速度、スピンドル13の回転数、糸種、糸太さなどが挙げられる。なお、内糸Y1や外糸Y2の送糸速度は巻取装置6の巻取速度によって律速されることとなる。
【0038】
運転条件記憶部53に記憶された各種の運転条件は、巻取制御部50、張力制御部51、スピンドル制御部52に適宜に読み込まれると共に、張力制御部51は、読み込んだ上記運転条件に基づいて負荷パターン記憶部54に記憶された複数の負荷パターンの中から最も適切な負荷パターンを読み込む。そして、巻取制御部50は上記運転条件に基づいて巻取装置6を制御することで合糸Yの巻き取りを開始し、スピンドル制御部52も同様に上記運転条件に基づいて電気モータ14を制御することでスピンドル13の回転を、この回転が所望の回転数に到達するまで例えば図5や図6に示されるように所定の角加速度において加速させる。それと同時に、張力制御部51は、読み込んだ負荷パターンに基づいて従動プーリ40の回転に対して負荷をかける。
【0039】
ところで、張力付与装置5において外糸Y2が従動プーリ40に対して摺動不能に巻き掛けられる態様は、以下のような作用によって実現される。即ち、複数の当接部材48の曲面kは従動プーリ40の軸心を含む切断面(図4下図を参照)において従動プーリ40の外周にV字状の溝を構成すると共に、異なる方向から、周方向に沿って交互に、外糸Y2に対して当接ないし押圧し、もって、外糸Y2は複数の当接部材48によってニップされ、従動プーリ40に対して摺動不能に巻き掛けられる態様が実現される。
【0040】
話を元に戻すと、スピンドル13の回転数が低い間は、外糸Y2は、ハット18やリング19に対して擦れ合いながら内糸用給糸パッケージ支持部3の外周を回転する。
【0041】
一方、スピンドル13の回転数が上昇し、外糸Y2に対して発生する遠心力に起因する外糸Y2の張力が、(1)外糸用給糸パッケージP2からの外糸Y2の解舒に伴い生じる張力である解舒張力や、(2)ゲート式テンサー9によって外糸Y2に対して付与される張力、(3)張力付与装置5によって外糸Y2に対して付与される張力、(4)第3糸ガイド11や第4糸ガイド12において外糸Y2に対して発生する張力、の(1)〜(4)などの合計値を上回ると、外糸Y2は、図1において鎖線で示されるようにハット18やリング19を離れて、ディスク15の外周縁と第5糸ガイド20との間で外周側へ膨出してバルーンを形成する。
【0042】
このときの遅れ角θ[deg.]は、図2(b)に示されるように、概ね90〜270とされる。外糸用給糸パッケージP2からの外糸Y2の解舒張力は、外糸用給糸パッケージP2の先端近傍から外糸Y2が解舒されるときと、外糸用給糸パッケージP2の基端近傍から外糸Y2が解舒されるときと、で大きく変動するものであるが、この解舒張力の変動は遅れ角θ[deg.]の増減によって相殺され、もって、外糸用給糸パッケージP2からの外糸Y2の解舒張力の大きな変動は、外糸Y2のバルーンには殆ど影響しないようになっている。
【0043】
そして、外糸Y2が内糸用給糸パッケージP1の外周で振り回されることで、第5糸ガイド20に至る直前において外糸Y2は内糸Y1と撚り合い合糸Yとされる。この撚り合った合糸状態を維持しながら張力緩和部22において張力が所定量、低減され、トラバース装置23において綾振られながら、巻取ボビンBに巻き取られる。
【0044】
以上に、本実施形態に係る撚糸機100の構成と作動を説明した。上記の撚糸機100が対象とする糸種は、例えば、ポリエステルやナイロン、レーヨン、アラミドなどが挙げられる。また、内糸用給糸パッケージP1や外糸用給糸パッケージP2の形状は、図1に示されるようなチーズ巻きの他に、例えば、コーン巻きやフランジ巻き、ボビン巻きであってもよい。
【0045】
以上説明したように本実施形態において、電気モータ14(駆動源)によって回転させられるスピンドル13によってバルーンが形成される外糸Y2を内糸Y1を供給するパッケージP1の外周側で送糸することによって、前記の内糸Y1と外糸Y2とを撚り合わせる、撚糸機100は、以下のように構成される。即ち、前記撚糸機100は、前記外糸Y2に対して張力を付与する張力付与装置5(張力付与手段)と、前記張力付与装置5の作動を制御する張力制御部51(張力制御手段)と、を備える。前記張力制御部51は、図5や図6に示されるように、前記スピンドル13の回転状態に応じて、前記外糸Y2に対して付与する張力を変更するように前記張力付与装置5の作動を制御する。前述したようにバルーンの形成と張力との関係に着目して本願発明者が想到した上記の構成によれば、外糸Y2のバルーンの形成を制御できるようになる。
【0046】
上記の撚糸機100は、更に、以下のように構成される。即ち、前記張力制御部51は、定常運転時に前記外糸Y2に対して付与する張力a1よりも小さい張力を、前記スピンドル13が回転を開始してから前記スピンドル13の回転数が所定の回転数に達するまでの間に前記外糸Y2に対して付与するように前記張力付与装置5の作動を制御する。以上の構成によれば、外糸Y2のバルーンが早期に形成され、もって、運転開始直後に生成される合糸Yの品質が改善されると共に、運転開始直後の糸切れも防止される。更に、前記外糸Y2のバルーンが形成される前であっても、例えば前記内糸Y1を供給する内糸用給糸パッケージP1などの他の部品に対して擦れ合う外糸Y2の張力が小さいことから、この点においても、合糸Yの品質が改善されると共に、運転開始直後の糸切れが防止されると言及できる。なお、上記実施形態では「所定の回転数」として、定常運転時におけるスピンドル13の回転数を一つの目安としている(図5及び図6参照)。また、上記「他の部品」とは、上記実施形態においては、主としてハット18やリング19が相当する。
【0047】
上記の撚糸機100は、更に、以下のように構成される。即ち、前記張力付与装置5は、前記外糸Y2が巻き掛けられ、この外糸Y2が送糸されることによって従動回転させられる従動プーリ40と、この従動プーリ40の回転を抑制する回転抑制手段(上記実施形態では、ヒステリシスブレーキ41)と、から構成される。以上の構成によれば、前記外糸Y2の品質に配慮しつつ前記外糸Y2に対して張力を付与する構成が実現される。
【0048】
上記実施形態では、回転抑制手段としてヒステリシスブレーキ41を例示したが、これに限られることなく、接触摩擦によるブレーキなども採用し得る。
【0049】
上記の撚糸機100は、更に、以下のように構成される。即ち、前記回転抑制手段は、前記従動プーリ40の回転を磁気摩擦によって抑制する電磁ブレーキ(上記実施形態では、ヒステリシスブレーキ41)である。以上の構成によれば、前記従動プーリ40の回転の抑制の強弱を容易に制御できる。更に言えば、磁気摩擦を利用する構成であるから摺動部を省略した構成が可能となり、もって、維持管理の負担が軽減されよう。
【0050】
上記の撚糸機100は、更に、以下のように構成される。即ち、前記従動プーリ40は、この従動プーリ40に巻き掛けられた前記外糸Y2が、異なる方向へ向かって、前記従動プーリ40の周方向に沿って交互に、押圧されるように構成される。以上の構成によれば、前記外糸Y2が送糸されることによって従動回転させられる前記従動プーリ40が前記外糸Y2との間の単なる接触抵抗で達成される構成と比較して、前記外糸Y2の品質劣化を低減できる。
【0051】
なお、上記実施形態においては、特殊な態様で配設された複数の当接部材48の曲面kによって上記のように外糸Y2が押圧される構成が実現されているが、この曲面kを平面に代えることは技術上、差し支えない。
【0052】
上記の撚糸機100は、更に、以下のように構成される。即ち、前記張力付与装置5は、前記撚糸機100の正面側に配設される。以上の構成によれば、前記張力付与装置5を構成する前記従動プーリ40に対する前記外糸Y2の巻き掛けの作業性が向上する。
【図面の簡単な説明】
【0053】
【図1】本発明の一実施形態に係る撚糸機の構成概略図
【図2】図1の2−2線矢視断面図
【図3】張力付与装置の斜視図
【図4】従動プーリの外周の展開図及び断面図
【図5】従動プーリの回転に負荷するトルクの負荷パターンを例示するグラフ
【図6】従動プーリの回転に負荷するトルクの負荷パターンを例示するグラフ
【符号の説明】
【0054】
1 撚糸ユニット
2 機台制御装置
5 張力付与装置
51 張力制御部
Y1 内糸
Y2 外糸
P1 内糸用給糸パッケージ
P2 外糸用給糸パッケージ
100 撚糸機
【特許請求の範囲】
【請求項1】
駆動源によって回転させられるスピンドルによってバルーンが形成される外糸を内糸を供給するパッケージの外周側で送糸することによって、前記の内糸と外糸とを撚り合わせる、撚糸機において、
前記外糸に対して張力を付与する張力付与手段と、
前記張力付与手段の作動を制御する張力制御手段と、
を備え、
前記張力付与手段は、前記外糸に対して付与する張力を変更可能に構成され、
前記張力制御手段は、前記スピンドルの回転状態に応じて、前記外糸に対して付与する張力を変更するように前記張力付与手段の作動を制御する、
ことを特徴とする撚糸機
【請求項2】
請求項1に記載の撚糸機において、
前記張力制御手段は、定常運転時に前記外糸に対して付与する張力よりも小さい張力を、前記スピンドルが回転を開始してから前記スピンドルの回転数が所定の回転数に達するまでの間に前記外糸に対して付与するように前記張力付与手段の作動を制御する、
ことを特徴とする撚糸機
【請求項3】
請求項1又は2に記載の撚糸機において、
前記張力付与手段は、前記外糸が巻き掛けられ、この外糸が送糸されることによって従動回転させられる従動プーリと、この従動プーリの回転を抑制する回転抑制手段と、から構成される、
ことを特徴とする撚糸機
【請求項4】
請求項3に記載の撚糸機において、
前記回転抑制手段は、前記従動プーリの回転を磁気摩擦によって抑制する電磁ブレーキである、
ことを特徴とする撚糸機
【請求項5】
請求項3又は4に記載の撚糸機において、
前記従動プーリは、この従動プーリに巻き掛けられた前記外糸が、異なる方向へ向かって、前記従動プーリの周方向に沿って交互に、押圧されるように構成される、
ことを特徴とする撚糸機
【請求項6】
請求項3〜5の何れか一に記載の撚糸機において、
前記張力付与手段は、前記撚糸機の正面側に配設される、
ことを特徴とする撚糸機
【請求項1】
駆動源によって回転させられるスピンドルによってバルーンが形成される外糸を内糸を供給するパッケージの外周側で送糸することによって、前記の内糸と外糸とを撚り合わせる、撚糸機において、
前記外糸に対して張力を付与する張力付与手段と、
前記張力付与手段の作動を制御する張力制御手段と、
を備え、
前記張力付与手段は、前記外糸に対して付与する張力を変更可能に構成され、
前記張力制御手段は、前記スピンドルの回転状態に応じて、前記外糸に対して付与する張力を変更するように前記張力付与手段の作動を制御する、
ことを特徴とする撚糸機
【請求項2】
請求項1に記載の撚糸機において、
前記張力制御手段は、定常運転時に前記外糸に対して付与する張力よりも小さい張力を、前記スピンドルが回転を開始してから前記スピンドルの回転数が所定の回転数に達するまでの間に前記外糸に対して付与するように前記張力付与手段の作動を制御する、
ことを特徴とする撚糸機
【請求項3】
請求項1又は2に記載の撚糸機において、
前記張力付与手段は、前記外糸が巻き掛けられ、この外糸が送糸されることによって従動回転させられる従動プーリと、この従動プーリの回転を抑制する回転抑制手段と、から構成される、
ことを特徴とする撚糸機
【請求項4】
請求項3に記載の撚糸機において、
前記回転抑制手段は、前記従動プーリの回転を磁気摩擦によって抑制する電磁ブレーキである、
ことを特徴とする撚糸機
【請求項5】
請求項3又は4に記載の撚糸機において、
前記従動プーリは、この従動プーリに巻き掛けられた前記外糸が、異なる方向へ向かって、前記従動プーリの周方向に沿って交互に、押圧されるように構成される、
ことを特徴とする撚糸機
【請求項6】
請求項3〜5の何れか一に記載の撚糸機において、
前記張力付与手段は、前記撚糸機の正面側に配設される、
ことを特徴とする撚糸機
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2009−209475(P2009−209475A)
【公開日】平成21年9月17日(2009.9.17)
【国際特許分類】
【出願番号】特願2008−52804(P2008−52804)
【出願日】平成20年3月4日(2008.3.4)
【出願人】(000006297)村田機械株式会社 (4,916)
【Fターム(参考)】
【公開日】平成21年9月17日(2009.9.17)
【国際特許分類】
【出願日】平成20年3月4日(2008.3.4)
【出願人】(000006297)村田機械株式会社 (4,916)
【Fターム(参考)】
[ Back to top ]