
撮像装置、その制御方法及びプログラム
【課題】被写体と背景との深度差が不十分な画像データであっても、被写体を含む領域と背景を含む領域とを正確に判別する。
【解決手段】撮像素子102は、被写体に合焦する第1の焦点位置又は前記第1の焦点位置より近距離側の第2の焦点位置で撮影された第1の画像データと、背景に合焦する焦点位置より遠距離側の第3の焦点位置で撮影された第2の画像データとを撮像する。領域判別回路112は、これらの画像データに基づいて、被写体を含む第1の領域と背景を含む第2の領域とを判別する。
【解決手段】撮像素子102は、被写体に合焦する第1の焦点位置又は前記第1の焦点位置より近距離側の第2の焦点位置で撮影された第1の画像データと、背景に合焦する焦点位置より遠距離側の第3の焦点位置で撮影された第2の画像データとを撮像する。領域判別回路112は、これらの画像データに基づいて、被写体を含む第1の領域と背景を含む第2の領域とを判別する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、撮像された画像データの被写体を含む領域と背景を含む領域とを判別する技術に関するものである。
【背景技術】
【0002】
近年、数多くのデジタルカメラやデジタルビデオカメラ等の撮像装置には、被写体以外の領域に対して画像処理を行う機能が搭載されている。例えば、その機能の一つとして、撮影された画像データの背景領域に対して、疑似的にぼかし効果を与える機能等がある。一般に、一眼レフカメラのように撮像素子が大きい撮像装置であれば、絞りを開いて焦点距離を長くすることで被写界深度が浅くなり、上記のような合焦している被写体以外の背景をぼかした画像データを撮影することが比較的容易である。一方、コンパクトデジタルカメラ等の撮像素子が小さい撮像装置では、上記の方法を用いたとしても、被写界深度が深くなる傾向にあるため、背景をぼかした画像データを撮影することが困難である。
【0003】
これに鑑みて、撮影された画像データの被写体領域と背景領域とを判別し、背景領域に対してフィルタリング処理を施すことにより、コンパクトデジタルカメラ等の撮像素子の小さい撮像装置でも、背景がぼけた画像データを取得できることが知られている。特許文献1には、被写体領域と背景領域との領域を判別するため、撮影された画像データから空間周波数成分を取得することが開示されている。即ち、特許文献1に開示される技術では、被写体が被写界深度の後端に位置するようにフォーカスレンズの位置を調整し、撮影された画像データにおける背景側のぼけ量を大きくする。そして、複数に分割されたブロック毎の空間周波数成分量を算出し、この値が閾値以上のブロックを被写体領域として判別している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−124398号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に開示された技術では、1枚の画像データの空間周波数成分量から領域の判別を行うため、背景領域側のぼけ量が乏しい場合に十分な精度が得られない問題がある。特に、近年普及しているコンパクトデジタルカメラのような撮像素子が小さい撮像装置では、上記処理を行っても十分なぼけ量が得られない傾向があるため、1枚の画像データの空間周波数成分量から領域の判別を行うことは困難である。
【0006】
そこで、本発明の目的は、被写体と背景との深度差が不十分な画像データであっても、被写体を含む領域と背景を含む領域とを正確に判別することにある。
【課題を解決するための手段】
【0007】
本発明の撮像装置は、撮像手段と、被写体に合焦する第1の焦点位置又は前記第1の焦点位置より近距離側の第2の焦点位置で前記撮像手段により撮影された第1の画像データと、背景に合焦する焦点位置より遠距離側の第3の焦点位置で前記撮像手段により撮影された第2の画像データとに基づいて、前記被写体を含む第1の領域と背景を含む第2の領域とを判別する判別手段を有することを特徴とする。
【発明の効果】
【0008】
本発明によれば、被写体と背景との深度差が不十分な画像データであっても、被写体を含む領域と背景を含む領域とを正確に判別することが可能となる。
【図面の簡単な説明】
【0009】
【図1】本発明の実施形態に係る撮像装置の構成を示す図である。
【図2】本発明の実施形態に係る撮像装置の撮影処理を示すフローチャートである。
【図3】領域判別回路の構成を示す図である。
【図4】領域判別回路による画像データの被写体領域と背景領域との判別処理を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明を適用した好適な実施形態を、添付図面を参照しながら詳細に説明する。
【0011】
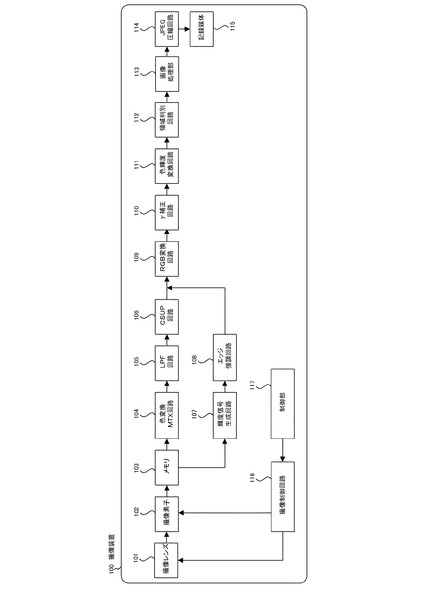
図1は、本発明の実施形態に係る撮像装置100の構成を示す図である。図1において、撮像素子102はCCDやCMOS等から構成され、その表面は、例えばベイヤー配列のようなRGBカラーフィルタにより覆われ、カラー撮影が可能である。撮像レンズ(フォーカスレンズ)101を介して入射した被写体像が撮像素子102上で結像されると、画像データ(画像信号)が生成され、メモリ103に記憶される。
【0012】
制御部117は、画像データ全体が適正露出になるようなシャッタ速度及び絞り値を計算するとともに、合焦領域内にある被写体に合焦するように撮像レンズ101の駆動量を計算する。そして、制御部117により計算された露出値(シャッタ速度、絞り値)及び撮像レンズ101の駆動量を示す情報が撮像制御回路116に出力され、各値に基づいて露出が制御される。
【0013】
色変換マトリックス回路104は、撮影された画像データが最適な色で再現されるように色ゲインをかけて色差信号R−Y、B−Yに変換する。ローパスフィルタ(LPF)回路105は、色差信号R−Y、B−Yの帯域を制限するための回路である。CSUP(Chroma Supress)回路106は、LPF回路105で帯域制限された画像データのうち、飽和部分の偽色信号を抑圧するための回路である。一方、撮影された画像データは、輝度信号生成回路107にも出力される。輝度信号生成回路107は、入力された画像データから輝度信号Yを生成する。エッジ強調回路108は、生成された輝度信号Yに対してエッジ強調処理を施す。
【0014】
RGB変換回路109は、CSUP回路106から出力される色差信号R−Y、B−Yと、エッジ強調回路108から出力される輝度信号YとをRGB信号に変換する。ガンマ補正回路110は、変換されたRGB信号に対して階調補正を施す。その後、色輝度変換回路111は、階調補正されたRGB信号をYUV信号に変換する。
【0015】
領域判別回路112は、YUV信号に変換された画像データに対して被写体領域と背景領域との判別を行う。領域判別回路112の詳細な構成については後述する。画像処理部113は、背景領域に対してぼかし処理等の画像処理を施す。JPEG圧縮回路114は、画像処理部113によって画像処理が施された画像データに対してJPEG方式等により圧縮して、圧縮後の画像データを外部又は内部の記録媒体115に記憶させる。
【0016】
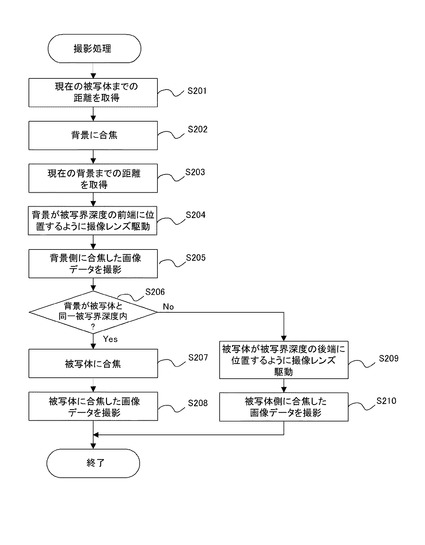
図2は、本実施形態に係る撮像装置100の撮影処理を示すフローチャートである。以下、図2を参照しながら、本実施形態に係る撮像装置100の撮影処理について説明する。
【0017】
撮影者が被写体に合焦させてシャッタスイッチが押下されると、ステップS201において、制御部117は、現在の被写体までの距離を取得する。ステップS202において、制御部117は背景に合焦するように撮像レンズ101を駆動させる。このとき、撮影者が撮像装置100を操作することによって任意に背景の合焦点を決定してもよいし、撮像装置100が自動的に画角内の複数箇所に合焦し、背景の合焦点を決定してもよい。
【0018】
ステップS203において、制御部117は、現在の背景までの距離を取得する。ステップS204において、制御部117は、背景が被写界深度の前端に位置するように撮像レンズ101を駆動させる。即ち、撮像レンズ101は、背景が被写界深度内に収まる範囲で、背景の合焦位置よりも遠距離側の位置(第3の焦点位置)に移動される。ステップS205において、制御部117は撮影動作を行う。この撮影動作により生成された画像データはメモリ103に保存される。また、この撮影動作により得られる画像データは、被写界深度の範囲内である背景にはピントが合っているが、手前に位置している被写体は背景よりもぼけており、そのぼけ量も背景に合焦したときよりも大きいものとなっている。
【0019】
ステップS206において、制御部117は、先に取得された背景までの距離と被写体までの距離とに基づいて(撮影条件に基づいて)、被写体に合焦した場合、同一被写界深度内に背景が存在するか否かを判定する。同一被写界深度内に背景が存在しない場合、処理はステップS207に移行する。一方、同一被写界深度内に背景が存在する場合、処理はステップS209に移行する。
【0020】
先ず、ステップS207に移行した場合の処理について説明する。ステップS207において、制御部117は、撮像レンズ101を駆動させて被写体に合焦させる。ステップS208において、撮像装置100は撮影動作を行い、撮影動作により生成された画像データをメモリ103に保存する。
【0021】
次に、ステップS209に移行した場合の処理について説明する。ステップS209において、制御部117は、被写界深度の後端に被写体が位置するように撮像レンズ101を駆動させる。即ち、撮像レンズ101は、被写体が被写界深度内に収まる範囲で、被写体の合焦位置(第1の焦点位置)よりも近距離側の位置(第2の焦点位置)に移動される。ステップS210において、撮像装置100は撮影動作を行い、撮影動作により生成された画像データをメモリ103に保存する。
【0022】
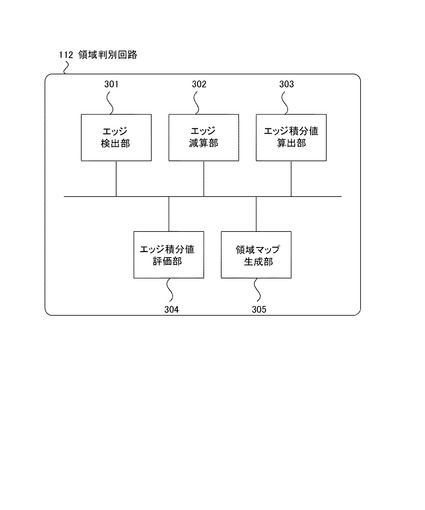
ここで、領域判別回路112の具体的な構成について説明する。図3は、領域判別回路112の構成を示す図である。図3に示すように、領域判別回路112は、エッジ検出部301、エッジ減算部302、エッジ積分値算出部303、エッジ積分値評価部304及び領域マップ生成部305を備える。
【0023】
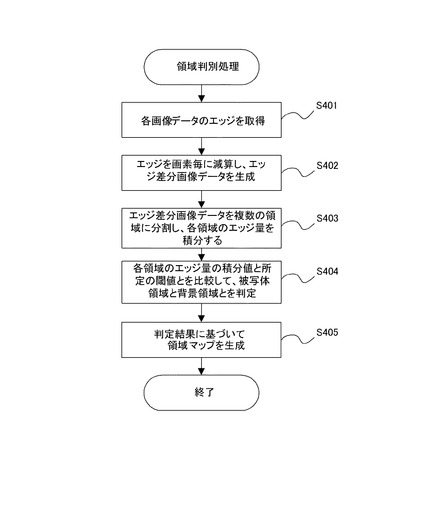
図4は、領域判別回路112による画像データの被写体領域と背景領域との判別処理を示すフローチャートである。以下、図4を参照しながら、領域判別回路112の処理について説明する。
【0024】
ステップS401において、エッジ検出部301は、図2に示す処理により取得された、被写体側に合焦した画像データと背景側に合焦した画像データとに対してバンドパスフィルタリング処理を施して絶対値をとり、それぞれの画像データのエッジを取得する。なお、ここでいう被写体側に合焦した画像データとは、ステップ208又はS210において取得された画像データである。また、背景側に合焦した画像データとは、ステップS205において取得された画像データである。なお、被写体側に合焦した画像データは第1の画像データの例であり、背景側に合焦した画像データは第2の画像データの例である。
【0025】
ステップS402において、エッジ減算部302は、被写体側に合焦した画像データのエッジから背景側に合焦した画像データのエッジを画素毎に減算し、エッジの差分をとった画像データ(以下、エッジ差分画像データと称す)を生成する。ステップS403において、エッジ積分値算出部303は、ステップS402で生成されたエッジ差分画像データを複数の領域に分割し、各領域のエッジ量を積分する。
【0026】
ステップS404において、エッジ積分値評価部304は、ステップS403で算出された各領域のエッジ量の積分値と所定の閾値とを比較する。エッジ量の積分値が所定の閾値以上である場合、エッジ積分値評価部304は、当該領域を被写体領域と判定する。一方、エッジ積分値評価部304は、エッジ量の積分値が所定の閾値未満である場合、当該領域を背景領域と判定する。なお、上記所定の閾値は予め決められた固定値でもよいし、画像データのエッジのヒストグラム分布から適応的に求めてもよい。
【0027】
ステップS405において、領域マップ生成部305は、ステップS404における判定結果に基づいて、被写体領域と背景領域とを判別することができる領域マップを生成する。上記領域マップにおいては、例えば合成比率が画像データ自体の画素値で表されている。なお、領域マップに対して、境界の段差を目立たなくさせるために被写体領域と背景領域との境界にローパスフィルタをかけてもよい。なお、上記被写体領域は第1の領域の例であり、上記背景領域は第2の領域の例である。
【0028】
次に、本実施形態における背景領域のぼかし処理について説明する。画像処理部113は、撮影された画像データに特殊フィルタ処理を施してぼけ画像データIMG2を生成する。ここで特殊フィルタ処理を施す対象となる画像データは、ステップS205、S208及びS210の何れかで撮影された画像データである。上記特殊フィルタ処理では、指定されたフィルタ形状に基づき、撮影された画像データに対してフィルタリング処理が行われる。このフィルタリング処理では、所定の輝度値を持った画素に任意で設定したゲイン値Kを乗算し、飽和画素の輝度値の補間が行われる。
【0029】
次に画像処理部113は、上記領域マップに基づいて、ステップS208又はS210で取得された被写体側に合焦した画像データIMG1とぼけ画像データIMG2とを合成する。ここで、画像データの合成処理の一例について説明する。画像処理部113は、上記領域マップの画素値から求められるα(0≦α≦1)に基づいて、被写体側に合焦した画像データIMG1とぼけ画像データIMG2とを合成し、合成画像データBを生成する。即ち、画像処理部113は、合成画像データBの各画素B[i,j]を次の式を用いて算出する。
【0030】
【数1】

【0031】
上記の処理によって得られた合成画像データBは、背景ぼかし画像データとして取得される。また、本実施形態における背景ぼかし画像データの生成処理は、上記実施形態に限定されるものではない。例えば、領域マップに基づき、被写体側に合焦した画像データの背景領域にのみ特殊フィルタ処理を施して、背景ぼかし画像データを取得するようにしてもよい。なお、撮影された画像データを縮小し、縮小した画像データを拡大して元の大きさに戻すことでぼけ画像データIMG2を生成にしてもよい。また、撮影された画像データに対してローパスフィルタをかけることでぼけ画像データIMG2を生成してもよい。ここでいう「撮影された画像データ」も、ステップS205、S208及びS210の何れかで撮影された画像データである。
【0032】
以上の処理により、切り分けられた背景領域に特殊な画像処理を施すことが可能となる。また、本発明はこれらの実施形態に限定されず、その要旨の範囲内で種々の変形及び変更が可能である。また、本実施形態における領域判別処理は、被写体側に合焦している画像データと背景側に合焦している画像データとを用いて行っているが、これに限定されるものではない。例えば、主要被写体よりも近距離側に存在する被写体に対して更に別の処理を施す場合、被写体よりも近距離側に合焦位置を移動して撮影された画像データを含む、3枚以上の画像データを用いるようにしてもよい。この場合、主要被写体を背景とみなした本実施形態における領域判別処理を行うことにより、画像データを深度に応じて複数の領域に分割することが可能となる。
【0033】
本実施形態によれば、被写体の合焦位置又は被写体の合焦位置より近距離側の位置にずらして撮影された画像データと、背景の合焦位置より遠距離側の位置にずらして撮影された画像データとのそれぞれのエッジを取得し、その差分値に基づいて領域判別を行う。これにより、被写体と背景との深度差が不十分な画像データにおいても、精度が高い被写体と背景との領域判別を行うことが可能となる。
【0034】
また、本発明は、以下の処理を実行することによっても実現される。即ち、上述した実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステム或いは装置に供給し、そのシステム或いは装置のコンピュータ(またはCPUやMPU等)がプログラムを読み出して実行する処理である。
【符号の説明】
【0035】
100:撮像装置、101:撮像レンズ、102:撮像素子、103:メモリ、104:色変換マトリックス回路、105:ローパスフィルタ回路、106:CSUP回路、107:輝度信号生成回路、108:エッジ強調回路、109:RGB変換回路、110:γ補正回路、111:色輝度変換回路、112:領域判別回路、113:画像処理部、114:JPEG圧縮回路、115:記録媒体、116:撮像制御回路、117:制御部、301:エッジ検出部、302:エッジ減算部、303:エッジ積分値算出部、304:エッジ積分値評価部、305:領域マップ生成部
【技術分野】
【0001】
本発明は、撮像された画像データの被写体を含む領域と背景を含む領域とを判別する技術に関するものである。
【背景技術】
【0002】
近年、数多くのデジタルカメラやデジタルビデオカメラ等の撮像装置には、被写体以外の領域に対して画像処理を行う機能が搭載されている。例えば、その機能の一つとして、撮影された画像データの背景領域に対して、疑似的にぼかし効果を与える機能等がある。一般に、一眼レフカメラのように撮像素子が大きい撮像装置であれば、絞りを開いて焦点距離を長くすることで被写界深度が浅くなり、上記のような合焦している被写体以外の背景をぼかした画像データを撮影することが比較的容易である。一方、コンパクトデジタルカメラ等の撮像素子が小さい撮像装置では、上記の方法を用いたとしても、被写界深度が深くなる傾向にあるため、背景をぼかした画像データを撮影することが困難である。
【0003】
これに鑑みて、撮影された画像データの被写体領域と背景領域とを判別し、背景領域に対してフィルタリング処理を施すことにより、コンパクトデジタルカメラ等の撮像素子の小さい撮像装置でも、背景がぼけた画像データを取得できることが知られている。特許文献1には、被写体領域と背景領域との領域を判別するため、撮影された画像データから空間周波数成分を取得することが開示されている。即ち、特許文献1に開示される技術では、被写体が被写界深度の後端に位置するようにフォーカスレンズの位置を調整し、撮影された画像データにおける背景側のぼけ量を大きくする。そして、複数に分割されたブロック毎の空間周波数成分量を算出し、この値が閾値以上のブロックを被写体領域として判別している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−124398号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に開示された技術では、1枚の画像データの空間周波数成分量から領域の判別を行うため、背景領域側のぼけ量が乏しい場合に十分な精度が得られない問題がある。特に、近年普及しているコンパクトデジタルカメラのような撮像素子が小さい撮像装置では、上記処理を行っても十分なぼけ量が得られない傾向があるため、1枚の画像データの空間周波数成分量から領域の判別を行うことは困難である。
【0006】
そこで、本発明の目的は、被写体と背景との深度差が不十分な画像データであっても、被写体を含む領域と背景を含む領域とを正確に判別することにある。
【課題を解決するための手段】
【0007】
本発明の撮像装置は、撮像手段と、被写体に合焦する第1の焦点位置又は前記第1の焦点位置より近距離側の第2の焦点位置で前記撮像手段により撮影された第1の画像データと、背景に合焦する焦点位置より遠距離側の第3の焦点位置で前記撮像手段により撮影された第2の画像データとに基づいて、前記被写体を含む第1の領域と背景を含む第2の領域とを判別する判別手段を有することを特徴とする。
【発明の効果】
【0008】
本発明によれば、被写体と背景との深度差が不十分な画像データであっても、被写体を含む領域と背景を含む領域とを正確に判別することが可能となる。
【図面の簡単な説明】
【0009】
【図1】本発明の実施形態に係る撮像装置の構成を示す図である。
【図2】本発明の実施形態に係る撮像装置の撮影処理を示すフローチャートである。
【図3】領域判別回路の構成を示す図である。
【図4】領域判別回路による画像データの被写体領域と背景領域との判別処理を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明を適用した好適な実施形態を、添付図面を参照しながら詳細に説明する。
【0011】
図1は、本発明の実施形態に係る撮像装置100の構成を示す図である。図1において、撮像素子102はCCDやCMOS等から構成され、その表面は、例えばベイヤー配列のようなRGBカラーフィルタにより覆われ、カラー撮影が可能である。撮像レンズ(フォーカスレンズ)101を介して入射した被写体像が撮像素子102上で結像されると、画像データ(画像信号)が生成され、メモリ103に記憶される。
【0012】
制御部117は、画像データ全体が適正露出になるようなシャッタ速度及び絞り値を計算するとともに、合焦領域内にある被写体に合焦するように撮像レンズ101の駆動量を計算する。そして、制御部117により計算された露出値(シャッタ速度、絞り値)及び撮像レンズ101の駆動量を示す情報が撮像制御回路116に出力され、各値に基づいて露出が制御される。
【0013】
色変換マトリックス回路104は、撮影された画像データが最適な色で再現されるように色ゲインをかけて色差信号R−Y、B−Yに変換する。ローパスフィルタ(LPF)回路105は、色差信号R−Y、B−Yの帯域を制限するための回路である。CSUP(Chroma Supress)回路106は、LPF回路105で帯域制限された画像データのうち、飽和部分の偽色信号を抑圧するための回路である。一方、撮影された画像データは、輝度信号生成回路107にも出力される。輝度信号生成回路107は、入力された画像データから輝度信号Yを生成する。エッジ強調回路108は、生成された輝度信号Yに対してエッジ強調処理を施す。
【0014】
RGB変換回路109は、CSUP回路106から出力される色差信号R−Y、B−Yと、エッジ強調回路108から出力される輝度信号YとをRGB信号に変換する。ガンマ補正回路110は、変換されたRGB信号に対して階調補正を施す。その後、色輝度変換回路111は、階調補正されたRGB信号をYUV信号に変換する。
【0015】
領域判別回路112は、YUV信号に変換された画像データに対して被写体領域と背景領域との判別を行う。領域判別回路112の詳細な構成については後述する。画像処理部113は、背景領域に対してぼかし処理等の画像処理を施す。JPEG圧縮回路114は、画像処理部113によって画像処理が施された画像データに対してJPEG方式等により圧縮して、圧縮後の画像データを外部又は内部の記録媒体115に記憶させる。
【0016】
図2は、本実施形態に係る撮像装置100の撮影処理を示すフローチャートである。以下、図2を参照しながら、本実施形態に係る撮像装置100の撮影処理について説明する。
【0017】
撮影者が被写体に合焦させてシャッタスイッチが押下されると、ステップS201において、制御部117は、現在の被写体までの距離を取得する。ステップS202において、制御部117は背景に合焦するように撮像レンズ101を駆動させる。このとき、撮影者が撮像装置100を操作することによって任意に背景の合焦点を決定してもよいし、撮像装置100が自動的に画角内の複数箇所に合焦し、背景の合焦点を決定してもよい。
【0018】
ステップS203において、制御部117は、現在の背景までの距離を取得する。ステップS204において、制御部117は、背景が被写界深度の前端に位置するように撮像レンズ101を駆動させる。即ち、撮像レンズ101は、背景が被写界深度内に収まる範囲で、背景の合焦位置よりも遠距離側の位置(第3の焦点位置)に移動される。ステップS205において、制御部117は撮影動作を行う。この撮影動作により生成された画像データはメモリ103に保存される。また、この撮影動作により得られる画像データは、被写界深度の範囲内である背景にはピントが合っているが、手前に位置している被写体は背景よりもぼけており、そのぼけ量も背景に合焦したときよりも大きいものとなっている。
【0019】
ステップS206において、制御部117は、先に取得された背景までの距離と被写体までの距離とに基づいて(撮影条件に基づいて)、被写体に合焦した場合、同一被写界深度内に背景が存在するか否かを判定する。同一被写界深度内に背景が存在しない場合、処理はステップS207に移行する。一方、同一被写界深度内に背景が存在する場合、処理はステップS209に移行する。
【0020】
先ず、ステップS207に移行した場合の処理について説明する。ステップS207において、制御部117は、撮像レンズ101を駆動させて被写体に合焦させる。ステップS208において、撮像装置100は撮影動作を行い、撮影動作により生成された画像データをメモリ103に保存する。
【0021】
次に、ステップS209に移行した場合の処理について説明する。ステップS209において、制御部117は、被写界深度の後端に被写体が位置するように撮像レンズ101を駆動させる。即ち、撮像レンズ101は、被写体が被写界深度内に収まる範囲で、被写体の合焦位置(第1の焦点位置)よりも近距離側の位置(第2の焦点位置)に移動される。ステップS210において、撮像装置100は撮影動作を行い、撮影動作により生成された画像データをメモリ103に保存する。
【0022】
ここで、領域判別回路112の具体的な構成について説明する。図3は、領域判別回路112の構成を示す図である。図3に示すように、領域判別回路112は、エッジ検出部301、エッジ減算部302、エッジ積分値算出部303、エッジ積分値評価部304及び領域マップ生成部305を備える。
【0023】
図4は、領域判別回路112による画像データの被写体領域と背景領域との判別処理を示すフローチャートである。以下、図4を参照しながら、領域判別回路112の処理について説明する。
【0024】
ステップS401において、エッジ検出部301は、図2に示す処理により取得された、被写体側に合焦した画像データと背景側に合焦した画像データとに対してバンドパスフィルタリング処理を施して絶対値をとり、それぞれの画像データのエッジを取得する。なお、ここでいう被写体側に合焦した画像データとは、ステップ208又はS210において取得された画像データである。また、背景側に合焦した画像データとは、ステップS205において取得された画像データである。なお、被写体側に合焦した画像データは第1の画像データの例であり、背景側に合焦した画像データは第2の画像データの例である。
【0025】
ステップS402において、エッジ減算部302は、被写体側に合焦した画像データのエッジから背景側に合焦した画像データのエッジを画素毎に減算し、エッジの差分をとった画像データ(以下、エッジ差分画像データと称す)を生成する。ステップS403において、エッジ積分値算出部303は、ステップS402で生成されたエッジ差分画像データを複数の領域に分割し、各領域のエッジ量を積分する。
【0026】
ステップS404において、エッジ積分値評価部304は、ステップS403で算出された各領域のエッジ量の積分値と所定の閾値とを比較する。エッジ量の積分値が所定の閾値以上である場合、エッジ積分値評価部304は、当該領域を被写体領域と判定する。一方、エッジ積分値評価部304は、エッジ量の積分値が所定の閾値未満である場合、当該領域を背景領域と判定する。なお、上記所定の閾値は予め決められた固定値でもよいし、画像データのエッジのヒストグラム分布から適応的に求めてもよい。
【0027】
ステップS405において、領域マップ生成部305は、ステップS404における判定結果に基づいて、被写体領域と背景領域とを判別することができる領域マップを生成する。上記領域マップにおいては、例えば合成比率が画像データ自体の画素値で表されている。なお、領域マップに対して、境界の段差を目立たなくさせるために被写体領域と背景領域との境界にローパスフィルタをかけてもよい。なお、上記被写体領域は第1の領域の例であり、上記背景領域は第2の領域の例である。
【0028】
次に、本実施形態における背景領域のぼかし処理について説明する。画像処理部113は、撮影された画像データに特殊フィルタ処理を施してぼけ画像データIMG2を生成する。ここで特殊フィルタ処理を施す対象となる画像データは、ステップS205、S208及びS210の何れかで撮影された画像データである。上記特殊フィルタ処理では、指定されたフィルタ形状に基づき、撮影された画像データに対してフィルタリング処理が行われる。このフィルタリング処理では、所定の輝度値を持った画素に任意で設定したゲイン値Kを乗算し、飽和画素の輝度値の補間が行われる。
【0029】
次に画像処理部113は、上記領域マップに基づいて、ステップS208又はS210で取得された被写体側に合焦した画像データIMG1とぼけ画像データIMG2とを合成する。ここで、画像データの合成処理の一例について説明する。画像処理部113は、上記領域マップの画素値から求められるα(0≦α≦1)に基づいて、被写体側に合焦した画像データIMG1とぼけ画像データIMG2とを合成し、合成画像データBを生成する。即ち、画像処理部113は、合成画像データBの各画素B[i,j]を次の式を用いて算出する。
【0030】
【数1】
【0031】
上記の処理によって得られた合成画像データBは、背景ぼかし画像データとして取得される。また、本実施形態における背景ぼかし画像データの生成処理は、上記実施形態に限定されるものではない。例えば、領域マップに基づき、被写体側に合焦した画像データの背景領域にのみ特殊フィルタ処理を施して、背景ぼかし画像データを取得するようにしてもよい。なお、撮影された画像データを縮小し、縮小した画像データを拡大して元の大きさに戻すことでぼけ画像データIMG2を生成にしてもよい。また、撮影された画像データに対してローパスフィルタをかけることでぼけ画像データIMG2を生成してもよい。ここでいう「撮影された画像データ」も、ステップS205、S208及びS210の何れかで撮影された画像データである。
【0032】
以上の処理により、切り分けられた背景領域に特殊な画像処理を施すことが可能となる。また、本発明はこれらの実施形態に限定されず、その要旨の範囲内で種々の変形及び変更が可能である。また、本実施形態における領域判別処理は、被写体側に合焦している画像データと背景側に合焦している画像データとを用いて行っているが、これに限定されるものではない。例えば、主要被写体よりも近距離側に存在する被写体に対して更に別の処理を施す場合、被写体よりも近距離側に合焦位置を移動して撮影された画像データを含む、3枚以上の画像データを用いるようにしてもよい。この場合、主要被写体を背景とみなした本実施形態における領域判別処理を行うことにより、画像データを深度に応じて複数の領域に分割することが可能となる。
【0033】
本実施形態によれば、被写体の合焦位置又は被写体の合焦位置より近距離側の位置にずらして撮影された画像データと、背景の合焦位置より遠距離側の位置にずらして撮影された画像データとのそれぞれのエッジを取得し、その差分値に基づいて領域判別を行う。これにより、被写体と背景との深度差が不十分な画像データにおいても、精度が高い被写体と背景との領域判別を行うことが可能となる。
【0034】
また、本発明は、以下の処理を実行することによっても実現される。即ち、上述した実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステム或いは装置に供給し、そのシステム或いは装置のコンピュータ(またはCPUやMPU等)がプログラムを読み出して実行する処理である。
【符号の説明】
【0035】
100:撮像装置、101:撮像レンズ、102:撮像素子、103:メモリ、104:色変換マトリックス回路、105:ローパスフィルタ回路、106:CSUP回路、107:輝度信号生成回路、108:エッジ強調回路、109:RGB変換回路、110:γ補正回路、111:色輝度変換回路、112:領域判別回路、113:画像処理部、114:JPEG圧縮回路、115:記録媒体、116:撮像制御回路、117:制御部、301:エッジ検出部、302:エッジ減算部、303:エッジ積分値算出部、304:エッジ積分値評価部、305:領域マップ生成部
【特許請求の範囲】
【請求項1】
撮像手段と、
被写体に合焦する第1の焦点位置又は前記第1の焦点位置より近距離側の第2の焦点位置で前記撮像手段により撮影された第1の画像データと、背景に合焦する焦点位置より遠距離側の第3の焦点位置で前記撮像手段により撮影された第2の画像データとに基づいて、前記被写体を含む第1の領域と背景を含む第2の領域とを判別する判別手段を有することを特徴とする撮像装置。
【請求項2】
前記第2の焦点位置は、前記被写体が被写界深度内に収まる範囲で前記第1の焦点位置より近距離側に移動した位置であることを特徴とする請求項1に記載の撮像装置。
【請求項3】
前記第3の焦点位置は、前記背景が被写界深度内に収まる範囲で前記背景に合焦する焦点位置より遠距離側に移動した位置であることを特徴とする請求項1又は2に記載の撮像装置。
【請求項4】
前記撮像手段は、撮影条件に応じて、前記第1の焦点位置及び前記第2の焦点位置のうちの何れかで前記第1の画像データを撮像することを特徴とする請求項1乃至3の何れか1項に記載の撮像装置。
【請求項5】
前記第1の画像データ又は前記第2の画像データに対して所定のフィルタ処理を施す処理手段と、
前記判別手段の判別結果に基づいて、前記処理手段により前記所定のフィルタ処理が施された前記第1の画像データ又は前記第2の画像データと、前記撮像手段により撮像された前記第1の画像データとを合成する合成手段とを更に有することを特徴とする請求項1乃至4の何れか1項に記載の撮像装置。
【請求項6】
前記判別手段の判別結果に基づいて、前記第1の画像データに対して所定のフィルタ処理を施す処理手段を更に有することを特徴とする請求項1乃至4の何れか1項に記載の撮像装置。
【請求項7】
前記第1の画像データ又は前記第2の画像データを縮小し、縮小した画像データを拡大して元の大きさに戻す処理手段と、
前記判別手段の判別結果に基づいて、前記処理手段によって処理された前記第1の画像データ又は前記第2の画像データと、前記撮像手段により撮像された前記第1の画像データとを合成する合成手段とを更に有することを特徴とする請求項1乃至4の何れか1項に記載の撮像装置。
【請求項8】
前記第1の画像データ又は前記第2の画像データに対してローパスフィルタをかける処理手段と、
前記判別手段の判別結果に基づいて、前記処理手段によって処理された前記第1の画像データ又は前記第2の画像データと、前記撮像手段により撮像された前記第1の画像データとを合成する合成手段とを更に有することを特徴とする請求項1乃至4の何れか1項に記載の撮像装置。
【請求項9】
撮像手段を有する撮像装置の制御方法であって、
被写体に合焦する第1の焦点位置又は前記第1の焦点位置より近距離側の第2の焦点位置で前記撮像手段により撮影された第1の画像データと、背景に合焦する焦点位置より遠距離側の第3の焦点位置で前記撮像手段により撮影された第2の画像データとに基づいて、前記被写体を含む第1の領域と背景を含む第2の領域とを判別する判別ステップを有することを特徴とする撮像装置の制御方法。
【請求項10】
撮像手段を有する撮像装置の制御方法をコンピュータに実行させるためのプログラムであって、
被写体に合焦する第1の焦点位置又は前記第1の焦点位置より近距離側の第2の焦点位置で前記撮像手段により撮影された第1の画像データと、背景に合焦する焦点位置より遠距離側の第3の焦点位置で前記撮像手段により撮影された第2の画像データとに基づいて、前記被写体を含む第1の領域と背景を含む第2の領域とを判別する判別ステップをコンピュータに実行させるためのプログラム。
【請求項1】
撮像手段と、
被写体に合焦する第1の焦点位置又は前記第1の焦点位置より近距離側の第2の焦点位置で前記撮像手段により撮影された第1の画像データと、背景に合焦する焦点位置より遠距離側の第3の焦点位置で前記撮像手段により撮影された第2の画像データとに基づいて、前記被写体を含む第1の領域と背景を含む第2の領域とを判別する判別手段を有することを特徴とする撮像装置。
【請求項2】
前記第2の焦点位置は、前記被写体が被写界深度内に収まる範囲で前記第1の焦点位置より近距離側に移動した位置であることを特徴とする請求項1に記載の撮像装置。
【請求項3】
前記第3の焦点位置は、前記背景が被写界深度内に収まる範囲で前記背景に合焦する焦点位置より遠距離側に移動した位置であることを特徴とする請求項1又は2に記載の撮像装置。
【請求項4】
前記撮像手段は、撮影条件に応じて、前記第1の焦点位置及び前記第2の焦点位置のうちの何れかで前記第1の画像データを撮像することを特徴とする請求項1乃至3の何れか1項に記載の撮像装置。
【請求項5】
前記第1の画像データ又は前記第2の画像データに対して所定のフィルタ処理を施す処理手段と、
前記判別手段の判別結果に基づいて、前記処理手段により前記所定のフィルタ処理が施された前記第1の画像データ又は前記第2の画像データと、前記撮像手段により撮像された前記第1の画像データとを合成する合成手段とを更に有することを特徴とする請求項1乃至4の何れか1項に記載の撮像装置。
【請求項6】
前記判別手段の判別結果に基づいて、前記第1の画像データに対して所定のフィルタ処理を施す処理手段を更に有することを特徴とする請求項1乃至4の何れか1項に記載の撮像装置。
【請求項7】
前記第1の画像データ又は前記第2の画像データを縮小し、縮小した画像データを拡大して元の大きさに戻す処理手段と、
前記判別手段の判別結果に基づいて、前記処理手段によって処理された前記第1の画像データ又は前記第2の画像データと、前記撮像手段により撮像された前記第1の画像データとを合成する合成手段とを更に有することを特徴とする請求項1乃至4の何れか1項に記載の撮像装置。
【請求項8】
前記第1の画像データ又は前記第2の画像データに対してローパスフィルタをかける処理手段と、
前記判別手段の判別結果に基づいて、前記処理手段によって処理された前記第1の画像データ又は前記第2の画像データと、前記撮像手段により撮像された前記第1の画像データとを合成する合成手段とを更に有することを特徴とする請求項1乃至4の何れか1項に記載の撮像装置。
【請求項9】
撮像手段を有する撮像装置の制御方法であって、
被写体に合焦する第1の焦点位置又は前記第1の焦点位置より近距離側の第2の焦点位置で前記撮像手段により撮影された第1の画像データと、背景に合焦する焦点位置より遠距離側の第3の焦点位置で前記撮像手段により撮影された第2の画像データとに基づいて、前記被写体を含む第1の領域と背景を含む第2の領域とを判別する判別ステップを有することを特徴とする撮像装置の制御方法。
【請求項10】
撮像手段を有する撮像装置の制御方法をコンピュータに実行させるためのプログラムであって、
被写体に合焦する第1の焦点位置又は前記第1の焦点位置より近距離側の第2の焦点位置で前記撮像手段により撮影された第1の画像データと、背景に合焦する焦点位置より遠距離側の第3の焦点位置で前記撮像手段により撮影された第2の画像データとに基づいて、前記被写体を含む第1の領域と背景を含む第2の領域とを判別する判別ステップをコンピュータに実行させるためのプログラム。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−115758(P2013−115758A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−262703(P2011−262703)
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]