
撮像装置、及び撮像装置における制御方法
【課題】ベストフォーカス位置を通り過ぎて戻す操作をしなくても容易に合焦させることが可能なマニュアルフォーカスの補助機能を提供すること。
【解決手段】複数の異なるフォーカス位置における撮像画像から合焦状態を検出し、合焦フォーカス位置と合焦近傍度合いとを算出する合焦評価手段と、撮影者のマニュアルフォーカス操作の状態を検出する状態検出手段と、を有し、前記合焦評価手段が算出した合焦近傍度合いと前記状態検出手段が検出したマニュアルフォーカス操作の状態とに応じて前記合焦状態を検出するためのフォーカス制御を異ならせる、撮像装置が提供される。
【解決手段】複数の異なるフォーカス位置における撮像画像から合焦状態を検出し、合焦フォーカス位置と合焦近傍度合いとを算出する合焦評価手段と、撮影者のマニュアルフォーカス操作の状態を検出する状態検出手段と、を有し、前記合焦評価手段が算出した合焦近傍度合いと前記状態検出手段が検出したマニュアルフォーカス操作の状態とに応じて前記合焦状態を検出するためのフォーカス制御を異ならせる、撮像装置が提供される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、撮像装置、及び撮像装置における制御方法に関する。
【背景技術】
【0002】
従来より、画像から焦点検出する技術が知られている。例えば、Wobbling制御を行い、合焦位置を検出する技術が知られている。また、合焦位置を撮影者に知らせる技術も知られている。例えば、下記の特許文献1には、Wobbling制御により複数のフォーカス位置で撮像された画像から焦点状態を検出し、検出した焦点状態に基づいて合焦位置を表示する技術が記載されている。また、下記の特許文献2には、リアルタイム表示用の画像ではなく、焦点検出用に撮像を行い、その撮像により得られた画像を利用して焦点検出を行う技術が記載されている。さらに、下記の特許文献3には、山登りオートフォーカス方式におけるマニュアルフォーカス操作時に合焦評価値を視覚的に表示する技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平5−308552号公報
【特許文献2】特開2010−160269号公報
【特許文献3】特開2007−279677号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記の特許文献1〜3においては、マニュアルフォーカス操作時に、フォーカスリングの操作状態及び合焦度合いに応じてフォーカス制御を行う構成については言及されていない。そのため、同文献に記載の技術を用いても、マニュアルフォーカスモードにおいて、撮影者が合焦状態を得るために操作すべき方向を知ることができない。例えば、合焦状態を表示するだけでは、結局、撮影者がフォーカスリングを回転させて合焦位置を探索する操作を行う必要が生じてしまう。
【0005】
そこで、本発明は、上記問題に鑑みてなされたものであり、本発明の目的とするところは、ベストフォーカス位置を通り過ぎて戻す操作をしなくても容易に合焦させることが可能なマニュアルフォーカスの補助機能を提供することが可能な、新規かつ改良された撮像装置、及び撮像装置における制御方法を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明のある観点によれば、複数の異なるフォーカス位置における撮像画像から合焦状態を検出し、合焦フォーカス位置と合焦近傍度合いとを算出する合焦評価手段と、撮影者のマニュアルフォーカス操作の状態を検出する状態検出手段と、を有し、前記合焦評価手段が算出した合焦近傍度合いと前記状態検出手段が検出したマニュアルフォーカス操作の状態とに応じて前記合焦状態を検出するためのフォーカス制御を異ならせる、撮像装置が提供される。
【0007】
かかる構成によると、マニュアルフォーカス操作中においても、フォーカス位置付近における合焦方向が算出されるため、例えば、この合焦方向を撮影者に通知したり、この合焦方向にフォーカスリングを駆動制御したりすることにより、撮影者が容易に正しい合焦フォーカス位置を得ることが可能になる。その結果、熟練した撮影者でなくとも、マニュアルフォーカス操作で素早く容易に合焦フォーカス位置を得ることが可能になる。また、熟練した撮影者でも、合焦フォーカス位置を得るための補助情報が示されるため、合焦フォーカス位置が判別しにくい被写体を撮影するシーンなどにおいて撮影操作を容易化することが可能になる。
【0008】
また、上記の撮像装置は、前記フォーカス制御を実施するフォーカス制御手段をさらに備えていてもよい。この場合、前記フォーカス制御手段は、フォーカスリングの回転移動量が所定の閾値を下回る場合に定期的に前記フォーカスレンズをウォブリング動作させ、前記フォーカスリングの回転移動量が所定の閾値を上回る場合には前記フォーカスレンズをウォブリング動作させないように構成されていてもよい。かかる構成により、無駄なウォブリング動作(例えば、大きくフォーカスリングを回転している最中に微妙な合焦点の探索をすることはないため、このような場合にウォブリング動作は無駄である。)が抑制され、駆動電力の低減、駆動部材の摩耗防止、電気系統の耐久性向上などの効果が得られる。
【0009】
また、前記フォーカス制御手段は、少なくとも絞り値及び前記合焦度合いに応じて決定される移動量にて前記フォーカスレンズをウォブリング動作させることが好ましい。
【0010】
また、前記フォーカス制御手段は、ズーミング操作が行われている場合に前記フォーカスレンズをウォブリング動作させないことが好ましい。かかる構成により、無駄なウォブリング動作(例えば、ズーミング操作中は合焦フォーカス位置が変化してしまうため、このような場合において合焦方向を探索するウォブリング動作は無駄である。)が抑制され、駆動電力の低減、駆動部材の摩耗防止、電気系統の耐久性向上などの効果が得られる。
【0011】
また、上記の撮像装置は、前記合焦近傍度合いを示す情報を画面に表示する情報表示手段をさらに備えていてもよい。かかる構成により、マニュアルフォーカス操作中において撮影者が合焦近傍度合いを確認しながら操作量を調整することが可能になる。
【0012】
また、前記情報表示手段は、ズーミング操作が行われている場合に前記合焦近傍度合いに関する情報を画面に表示しないように構成されていてもよい。ズーミング操作中は合焦フォーカス位置が変化してしまうため、このような場合において合焦近傍度合いを表示することは、あまり意味がない。一方で、ズーミング操作中に合焦近傍度合いを表示しないようにすることで、表示や合焦近傍度合いの逐次的な演算に要する消費電力を抑制することが可能になる。
【0013】
また、前記合焦評価手段は、分割された複数の撮像領域毎に合焦近傍度合いを検出し、前記情報表示手段は、前記撮像領域毎に検出された合焦近傍度合いを示す情報を前記各撮像領域に対応する画面領域に表示するように構成されていてもよい。かかる構成により、被写体のどの領域が合焦フォーカス位置に近い状態になっているのかを容易に把握することが可能になる。
【0014】
また、前記情報表示手段は、合焦している撮像領域に対応する画面領域の表示を強調するように構成されていてもよい。かかる構成により、被写体のどの領域が合焦しているのかを容易に認識することが可能になる。
【0015】
また、上記課題を解決するために、本発明の別の観点によれば、複数の異なるフォーカス位置における撮像画像から合焦状態を検出し、合焦フォーカス位置と合焦近傍度合いとを算出する合焦評価工程と、撮影者のマニュアルフォーカス操作の状態を検出する状態検出工程と、を含み、前記合焦評価工程で算出した合焦近傍度合いと前記状態検出工程で検出したマニュアルフォーカス操作の状態とに応じて前記合焦状態を検出するためのフォーカス制御を異ならせる、撮像装置における制御方法が提供される。
【0016】
かかる構成によると、マニュアルフォーカス操作中においても、合焦位置付近における合焦方向が算出されるため、例えば、この合焦方向を撮影者に通知したり、この合焦方向にフォーカスリングを駆動制御したりすることにより、撮影者が容易に正しい合焦フォーカス位置を得ることが可能になる。その結果、熟練した撮影者でなくとも、マニュアルフォーカス操作で素早く容易に合焦フォーカス位置を得ることが可能になる。また、熟練した撮影者でも、合焦フォーカス位置を得るための補助情報が示されるため、合焦フォーカス位置が判別しにくい被写体を撮影するシーンなどにおいて撮影操作を容易化することが可能になる。
【0017】
上記の制御方法は、前記フォーカス制御を実施するフォーカス制御工程をさらに含んでいてもよい。この場合、前記フォーカス制御工程では、フォーカスリングの回転移動量が所定の閾値を下回る場合に定期的に前記フォーカスレンズをウォブリング動作させ、前記フォーカスリングの回転移動量が所定の閾値を上回る場合には前記フォーカスレンズをウォブリング動作させないように制御してもよい。かかる構成により、無駄なウォブリング動作(例えば、大きくフォーカスリングを回転している最中に微妙な合焦点の探索をすることはないため、このような場合にウォブリング動作は無駄である。)が抑制され、駆動電力の低減、駆動部材の摩耗防止、電気系統の耐久性向上などの効果が得られる。
【0018】
また、前記フォーカス制御工程では、少なくとも絞り値及び前記合焦近傍度合いに応じて決定される移動量にて前記フォーカスレンズをウォブリング動作させるように制御してもよい。
【0019】
また、前記フォーカス制御工程では、ズーミング操作が行われている場合に前記フォーカスレンズをウォブリング動作させないように制御してもよい。かかる構成により、無駄なウォブリング動作(例えば、ズーミング操作中は合焦フォーカス位置が変化してしまうため、このような場合において合焦方向を探索するウォブリング動作は無駄である。)が抑制され、駆動電力の低減、駆動部材の摩耗防止、電気系統の耐久性向上などの効果が得られる。
【0020】
また、上記の撮像装置における制御方法は、前記合焦近傍度合いを示す情報を画面に表示する情報表示工程をさらに含んでいてもよい。かかる構成により、マニュアルフォーカス操作中において撮影者が合焦近傍度合いを確認しながら操作量を調整することが可能になる。
【0021】
また、前記情報表示工程では、ズーミング操作が行われている場合に前記合焦近傍度合いを示す情報を画面に表示しないように制御してもよい。ズーミング操作中は合焦フォーカス位置が変化してしまうため、このような場合において合焦近傍度合いを表示することは、あまり意味がない。一方で、ズーミング操作中に合焦近傍度合いを表示しないようにすることで、表示や合焦近傍度合いの逐次的な演算に要する消費電力を抑制することが可能になる。
【0022】
また、前記合焦評価工程では、分割された複数の撮像領域毎に合焦近傍度合いを検出し、前記情報表示工程では、前記撮像領域毎に検出された合焦近傍度合いを示す情報を前記各撮像領域に対応する画面領域に表示するように制御してもよい。かかる構成により、被写体のどの領域が合焦に近い状態になっているのかを容易に把握することが可能になる。
【0023】
また、前記情報表示工程では、合焦している撮像領域に対応する画面領域の表示を強調するように制御してもよい。かかる構成により、被写体のどの領域が合焦しているのかを容易に認識することが可能になる。
【発明の効果】
【0024】
以上説明したように本発明によれば、ベストフォーカス位置を通り過ぎて戻す操作をしなくても容易に合焦させることが可能なマニュアルフォーカスの補助機能を提供することが可能になる。
【図面の簡単な説明】
【0025】
【図1】本発明の一実施形態に係る撮像装置の構成例を示した図である。
【図2】同実施形態に係る撮像装置の制御方法について説明するための説明図である。
【図3】同実施形態に係る撮像装置の制御方法について説明するための説明図である。
【図4】同実施形態に係る撮像装置の制御方法について説明するための説明図である。
【図5】同実施形態に係る撮像装置の制御方法について説明するための説明図である。
【図6】同実施形態に係る撮像装置の制御方法について説明するための説明図である。
【図7】同実施形態に係る撮像装置の制御方法について説明するための説明図である。
【図8】同実施形態に係る撮像装置の制御方法について説明するための説明図である。
【図9】同実施形態に係る撮像装置の制御方法について説明するための説明図である。
【図10】同実施形態に係る撮像装置の制御方法について説明するための説明図である。
【図11】同実施形態に係る撮像装置の制御方法について説明するための説明図である。
【図12】同実施形態に係る撮像装置の制御方法について説明するための説明図である。
【図13】同実施形態に係る撮像装置の制御方法について説明するための説明図である。
【発明を実施するための形態】
【0026】
以下に添付図面を参照しながら、本発明の好適な実施の形態について詳細に説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
【0027】
<実施形態>
本発明の一実施形態について説明する。本実施形態は、マニュアルフォーカスモードにおいて操作状態や合焦度合いに応じてフォーカス制御を切り替える構成に特徴がある。以下では、まず、本実施形態に係る撮像装置10の全体的な構成について簡単に説明した後、本実施形態に係る特徴的な撮像装置10の制御動作について詳細に説明する。
【0028】
[撮像装置10の構成]
まず、図1を参照しながら、本実施形態に係る撮像装置10の構成例について説明する。図1は、本実施形態に係る撮像装置10の構成例を示した説明図である。
【0029】
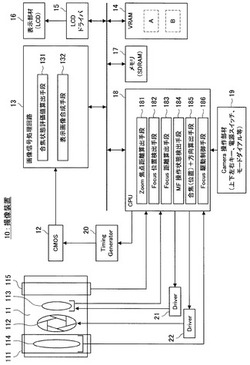
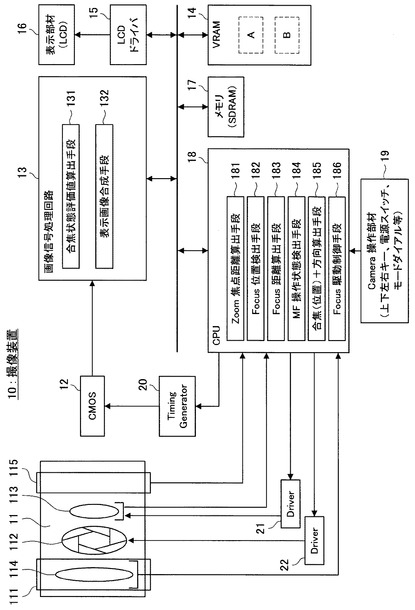
図1に示すように、撮像装置10は、主に、撮像光学系11と、撮像素子12と、画像信号処理回路13と、VRAM14と、LCDドライバ15と、LCD16と、メモリ17と、制御手段18と、操作部材19と、タイミングジェネレータ20と、フォーカス駆動手段21と、絞り駆動手段22と、により構成される。
【0030】
なお、説明の都合上、撮像素子12としてCMOS(Complementary Metal Oxide Semiconductor)を想定し、表示手段としてLCD(Liquid Crystal Display)を想定するが、本実施形態に係る撮像装置10の構成はこれに限定されない。例えば、CMOSに代えてCCD(Charge Coupled Device)を用いることも可能である。また、LCDに代えてELD(Electro−Luminescence Display)を用いることも可能である。
【0031】
(電源投入時の動作概要)
撮像装置10は、電源がオンにされると同時に撮像素子12を制御し、一定間隔(例えば、1/60秒単位:以後、この単位を1frameと呼ぶ)で露光及び画像データの読み出しを実行する。この画像データは、リアルタイムでLCD16に表示される。また、撮像装置10は、画像データから被写体の輝度値を算出し、撮像した画像が適正な明るさになるように絞り、露光時間、及びゲイン値を制御する。本実施形態に係る撮像装置10は、このような動作に加え、マニュアルフォーカスモードにおいて撮影者が合焦位置を検出するために利用可能な補助的機能を搭載している。この補助的機能は、主に制御手段18の機能により実現される。以下では、当該補助的機能を含め、撮像装置10の全体的な機能構成について詳細に説明する。
【0032】
(撮像光学系11)
撮像光学系11は、主に、ズームレンズ114、絞り112、フォーカスレンズ113などにより構成される。撮像光学系11は、外光を撮像素子12に結像させる光学系システムであり、被写体からの光を撮像素子12まで透過させる。ズームレンズ114は、焦点距離を変化させて画角を変化させるレンズである。ズームレンズ114の位置は、ズームリング115を手動で回転させることにより調整可能である。
【0033】
絞り112は、透過する光量を調節する機構である。また、絞り112は、制御手段18による制御に応じて絞り駆動手段22により駆動される。フォーカスレンズ113は、その位置の移動により撮像素子12の撮像面に被写体像を合焦させる。また、フォーカスレンズ113は、制御手段18による制御に応じてフォーカス駆動手段により駆動されるか、或いは、フォーカスリング115を手動で回転することにより駆動される。
【0034】
(撮像素子12)
撮像素子12は、撮像光学系11を透過して入射した光を電気信号に変換する光電変換が可能な光電変換素子である。なお、図中には明示していないが、撮像素子12の後段には、CDS/AMP(相関二重サンプリング回路(correlated double sampling)/増幅器(amplifier))回路やA/Dコンバータなどが設けられる。
【0035】
CDS/AMP回路は、撮像素子12から出力された電気信号に含まれる低周波ノイズを除去すると共に、電気信号を任意のレベルまで増幅する。A/Dコンバータは、CDS/AMP回路から出力された電気信号をデジタル変換してデジタル信号を生成する。これら撮像素子12やCDS/AMP回路は、タイミングジェネレータ20から出力されるタイミング信号に応じて駆動する。例えば、撮像素子12の露光期間や電荷の読み出しタイミングなどは、タイミングジェネレータ20から出力されるタイミング信号に応じて制御される。
【0036】
(画像信号処理回路13)
撮像素子12などを通じて出力されたデジタル信号は、画像信号処理回路13に入力される。画像信号処理回路13は、入力されたデジタル信号に対して処理を施し、画像処理が可能となる画像データを生成する。例えば、画像信号処理回路13は、デジタル信号に対してホワイトバランス調整、γ値調整、輪郭強調制御などを施して画像データを生成する。また、画像信号処理回路13は、合焦状態評価値算出手段131の機能により、画像データから合焦状態評価値を算出する。この合焦状態評価値は、所定の画像領域における被写体の先鋭度を表すものである。複数のフォーカス位置で撮像された画像データの合焦状態評価値を用いると、合焦度合いを評価することが可能である。この合焦状態評価値は、制御手段18に入力される。
【0037】
また、画像信号処理回路13は、画像データの圧縮/伸張などの処理を実行する。例えば、画像信号処理回路13は、JPEG圧縮形式やLZW圧縮形式などの圧縮形式で画像データを圧縮し、圧縮後の画像データをメモリ17に格納する。また、画像信号処理回路13は、メモリ17から読み出した圧縮後の画像データを読み出し、読み出した圧縮後の画像データを伸張する。また、画像信号処理回路13は、LCD16に画像データを表示させる。さらに、画像信号処理回路13は、表示画像合成手段132の機能により、合焦状態などを示す表示内容を画像に合成して表示させる。なお、こうして得られた表示画像データはVRAM14に格納される。
【0038】
(VRAM14、LCDドライバ15、LCD16)
VRAM(Video RAM)14は、画像表示用メモリであり、複数のチャネルを有する。そのため、VRAM14は、メモリ17から表示画像データを入力する処理と、LCDドライバ15へと画像データを出力する処理とを同時に実行できる。また、VRAM14の容量は、LCD16の解像度や最大発色数に依存する。
【0039】
VRAM14に格納された表示画像データは、LCDドライバ15により読み出される。LCDドライバ15は、VRAM14から読み出した表示画像データをLCD16に表示する。なお、LCD16に表示される画像データとしては、例えば、撮像操作に応じて撮影された表示画像データ、撮像操作前のライブビュー表示用画像データ、各種設定画面やGUIなどの画像データ、メモリ17又は記録媒体(非図示)に格納された画像データなどがある。
【0040】
(メモリ17)
メモリ17としては、例えば、SDRAM(synchronous DRAM)などを用いることができる。このメモリ17は、画像データを一時的に保存するために利用される。なお、メモリ17は、複数の画像データを記憶できるだけの記憶容量を有している。また、メモリ17は、フォーカス制御時の画像データを順次保持するために利用される。さらに、メモリ17には、制御手段18の制御用プログラムなどが格納されることもある。メモリ17に対する画像データの書き込み/読み出しは、例えば、画像信号処理回路13により制御される。
【0041】
(メディアコントローラ(非図示))
図1には明示していないが、撮像装置10には、通常、固定又は着脱可能な記録メディア、及び記録メディアに対する画像データの書き込み/読み出しを制御するためのメディアコントローラが搭載されている。このメディアコントローラは、記録メディアに対する画像データの書き込み/書き込み制御の他、設定情報の読み出し/書き込み制御などを実行する。なお、記録メディアとしては、例えば、光ディスク(CD、DVD、BDなど)、光磁気ディスク、磁気ディスク、半導体記憶媒体などがある。
【0042】
(操作部材19)
ところで、撮像開始の操作や各種設定の操作は、操作部材19を用いて行われる。操作部材19としては、例えば、上下左右キー(十字キー)、電源スイッチ、モードダイアル、レリーズボタンなどがある。操作部材19が操作されると、その操作に応じて操作信号が制御手段18に入力される。例えば、レリーズボタンが半押しされると、フォーカス制御開始の操作信号が制御手段18に入力され、制御手段18によるフォーカス制御が開始する。また、レリーズボタンの半押しが解除されると、フォーカス制御終了の操作信号が制御手段18に入力され、制御手段18によるフォーカス制御が終了する。また、レリーズボタンが全押しされた場合、撮像開始の操作信号が制御手段18に入力される。
【0043】
(制御手段18)
以下、制御手段18が有する機能について説明する。
【0044】
制御手段18は、適正露光算出機能を有する。この機能は、画像信号処理回路13により画像データの輝度値に基づいて算出されるAE(Auto Exposure:自動露光)評価値から、絞り112の絞り量やシャッター速度の適正値を算出する機能である。適正露光算出機能により絞り量を算出すると、制御手段18は、算出した絞り量となるように絞り駆動手段22を制御して絞り112を駆動させる。なお、制御手段18は、絞り112と同時に露光時間やゲイン値などを制御するように構成されていてもよい。
【0045】
また、制御手段18は、フォーカス制御機能を有する。この機能により実現される処理内容は、オートフォーカスモードにおいて操作部材19からフォーカス制御開始の操作信号を受けた場合(AF時動作)と、マニュアルフォーカスモードにおいてフォーカスリング115が回転された場合(MF時動作)とで異なる。
【0046】
まず、AF時動作について説明する。
【0047】
フォーカス制御開始の操作信号を受けると、制御手段18は、画像信号処理回路13により画像データの輝度値に基づいて算出されるAF(auto focus:自動焦点)評価値に基づいて、フォーカスレンズ113の合焦位置を算出する。なお、AF評価値は、例えば、コントラスト検出方式を採用した場合、コントラスト値がピークとなるフォーカス位置を合焦位置として合焦位置から離れる程低くなる。つまり、コントラスト値がピークとなるフォーカス位置を検出し、検出したフォーカス位置を合焦位置と判断するのである。合焦位置を算出すると、制御手段18は、フォーカス位置を合焦位置に合うように、フォーカス駆動手段21を制御してフォーカスレンズ113の位置を移動させる。
【0048】
次に、MF時動作について説明する。本実施形態に係る撮像装置10の特徴的な機能の1つは、MF時動作における制御手段18の動作にある。以下、制御手段18のMF時動作について説明する。
【0049】
図1に示すように、制御手段18は、主に、ズーム焦点距離算出手段181と、フォーカス位置検出手段182と、フォーカス距離算出手段183と、マニュアルフォーカス操作状態検出手段184と、合焦位置・方向算出手段185と、フォーカス駆動制御手段186とを有する。
【0050】
(ズーム焦点距離算出手段181)
撮像光学系11が単焦点レンズで構成されている場合は焦点距離に変化はないが、撮像装置10のようにズームレンズ114を搭載している場合、撮影者のズーミング操作(ズームリング111の回転操作)によって焦点距離(以下、ズーム焦点距離)が変化してしまう。そこで、ズーム焦点距離算出手段181は、例えば、ズームリング111の回転に連動して出力される可変抵抗器の出力値からズーム焦点距離を検出する。より具体的には、ズーム焦点距離算出手段181が、ズームリング111の回転位置に連動する可変抵抗器の抵抗値をA/D変換した後、予め用意しておいた抵抗値とズーム焦点距離との対応関係を示す対応データに基づいてズーム焦点距離を検出する。
【0051】
このようにして検出されたズーム焦点距離は、メモリ17又は制御手段18に設けられた記憶手段(非図示)に一時的に格納される。また、前回撮像時のズーム焦点距離と、今回撮像時のズーム焦点距離とを比較し、両者の差が所定以上であるか否かを判定することで、ズーミング操作の有無を検出することができる。
【0052】
(フォーカス位置検出手段182、フォーカス距離算出手段183)
フォーカス位置検出手段182は、撮像装置10の起動時に、フォーカス位置がOver∞となる位置までフォーカスレンズ113の位置を移動させる。フォーカス位置がOver∞となるフォーカスレンズ113の位置検出は、例えば、その位置にフォーカスレンズ113が達した際に電気的に短絡する接点を設けておき、その短絡状態を検出することにより実現可能である。Over∞位置までフォーカスレンズ113を移動させた後、フォーカス位置検出手段182は、近方向側にフォーカスレンズ113を駆動し、短絡状態から非短絡状態への状態変化を検出する。そして、フォーカス位置検出手段182は、検出したタイミングにおけるフォーカス位置を基準位置に設定する。
【0053】
また、フォーカス位置検出手段182は、基準位置からフォーカスレンズ113を移動した際のアクチュエータ(ステッピングモータ)の駆動パルス量で定義されるフォーカス位置を検出する。フォーカス位置検出手段182により検出されたフォーカス位置は、フォーカス距離算出手段183に入力される。フォーカス位置が入力されると、フォーカス位置算出手段183は、入力されたフォーカス位置とズーム焦点距離とに基づいてフォーカス距離を算出する。例えば、フォーカス距離算出手段183は、ズーム焦点距離毎にフォーカス距離とフォーカス位置との対応関係を記述した対応テーブルを保持しており、この対応テーブルを参照することでズーム焦点距離とフォーカス位置とに基づいてフォーカス距離を算出することができる。
【0054】
(マニュアルフォーカス操作状態検出手段184)
マニュアルフォーカス操作状態検出手段184は、フォーカスリング115の回転状態を検出する。撮像装置10のフォーカスリング115には、フォーカスリング115の回転に応じて、その回転方向及び相対的な回転量を検出するための検出器が設けられている。そのため、マニュアルフォーカス操作状態検出手段184は、この検出器からの出力に基づいてフォーカスリング115の回転状態を検出することができる。例えば、マニュアルフォーカス操作状態検出手段184は、定期的に検出器の出力を保存しておき、前回保存した検出結果と、今回検出した検出結果とを比較して回転方向及び単位時間当たりの変化量(回転度合い)を検出する。
【0055】
(合焦位置・方向検出手段185、フォーカス駆動制御手段186)
合焦位置・方向検出手段185は、合焦位置を検出すると共に、合焦位置と現在のフォーカス位置との差分から合焦するためにフォーカスレンズ113を移動すべき方向(フォーカス位置を移動させるべき方向;以下、合焦方向)を算出する。このとき、フォーカス駆動制御手段186は、合焦方向の検出に利用する合焦状態評価値の差分を得るためにフォーカスレンズ113を駆動制御してWobbling動作を行わせる。また、合焦位置・方向検出手段185は、算出した合焦位置及び合焦方向に関する情報をLCD16に表示させる。
【0056】
以上、本実施形態に係る撮像装置10の構成について説明した。しかし、ここでは制御手段18の詳細な制御動作については説明していない。そこで、以下では、図6〜図13に示したフローチャート及び図2〜図5に示した説明図を参照しながら、主に制御手段18による制御動作について詳細に説明する。
【0057】
[撮像装置10による制御動作について]
まず、図6を参照しながら、全体的な処理の流れについて説明する。
【0058】
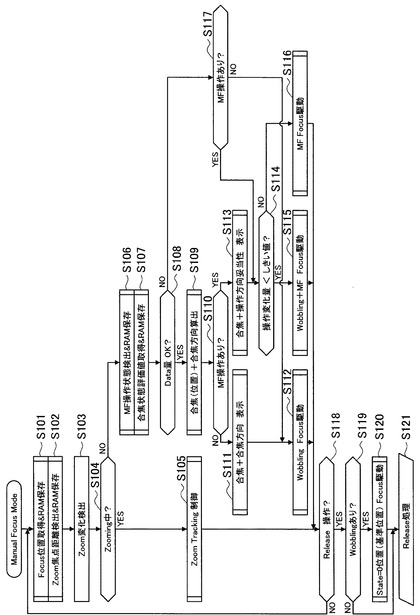
図6に示すように、まず、撮像装置10は、フォーカス位置検出手段182の機能によりフォーカス位置を取得して記憶手段に記録する(S101)。また、撮像装置10は、ズーム焦点距離算出手段181の機能によりズーム焦点距離を検出して記憶手段に記録する(S102)。なお、前回撮像時のズーム焦点距離と今回撮像時のズーム焦点距離とが記憶手段に記録された状態となる。次いで、撮像装置10は、マニュアルフォーカス操作状態検出手段184の機能により、記憶手段に記録された前回撮像時のズーム焦点距離と今回撮像時のズーム焦点距離とを比較し(S103)、ズーム焦点距離の変化からズーミング操作中であるか否かを判定する(S104)。
【0059】
ズーミング操作中である場合、撮像装置10は、処理をステップS105に進める。一方、ズーミング操作中でない場合、撮像装置10は、処理をステップS106に進める。
【0060】
処理をステップS105に進めた場合、撮像装置10は、ズームトラッキング制御を実施し(S105)、処理をステップS118に進める。なお、ズームトラッキング制御の処理については、後段において図7を参照しながら詳細に説明する。一方、処理をステップS106に進めた場合、撮像装置10は、マニュアルフォーカス操作状態検出手段184の機能により検出したマニュアルフォーカス操作状態を記憶手段に記録する(S106)。さらに、撮像装置10は、合焦状態評価値算出手段131により算出された合焦状態評価値を記憶手段に記録し(S107)、処理をステップS108に進める。
【0061】
処理をステップS108に進めた場合、撮像装置10は、データ量が所定の条件を満たすか否かを判定する(S108)。所定の条件を満たす場合、撮像装置10は、処理をステップS109に進める。一方、所定の条件を満たさない場合、撮像装置10は、処理をステップS117に進める。
【0062】
処理をステップS109に進めた場合、撮像装置10は、合焦位置・方向検出手段185の機能により合焦位置及び合焦方向を算出する(S109)。なお、合焦位置及び合焦方向の算出に係る処理については、後段において図8を参照しながら詳細に説明する。次いで、撮像装置10は、マニュアルフォーカス操作が行われたか否かを判定する(S110)。マニュアルフォーカス操作が行われた場合、撮像装置10は、処理をステップS113に進める。一方、マニュアルフォーカス操作が行われていない場合、撮像装置10は、処理をステップS111に進める。
【0063】
処理をステップS111に進めた場合、撮像装置10は、合焦位置及び合焦方向を表示する(S111)。次いで、撮像装置10は、フォーカス駆動制御手段186の機能により後述する第1の制御処理(Wobbling Focus駆動)を実施し(S112)、処理をステップS118に進める。一方、処理をステップS113に進めた場合、撮像装置10は、合焦位置及び操作方向の妥当性を表示する(S113)。次いで、撮像装置10は、操作変化量が所定の閾値より小さいか否かを判定する(S114)。操作変化量<閾値の場合、撮像装置10は、処理をステップS115に進める。一方、操作変化量≧閾値の場合、撮像装置10は、処理をステップS116に進める。
【0064】
処理をステップS115に進めた場合、撮像装置10は、第2の制御処理(Wobbling+MF Focus駆動)を実施し(S115)、処理をステップS118に進める。一方、処理をステップS116に進めた場合、撮像装置10は、第3の制御処理(MF Focus駆動)を実施し(S116)、処理をステップS118に進める。なお、ステップS108の処理においてデータ量が所定の条件を満たさず、処理をステップS117に進めた場合、撮像装置10は、マニュアルフォーカス操作が行われたか否かを判定する(S117)。マニュアルフォーカス操作が行われた場合、撮像装置10は、処置をステップS114に進める。一方、マニュアルフォーカス操作が行われていない場合、撮像装置10は、処理をステップS112に進める。
【0065】
上述したいずれかの流れに沿って処理をステップS118に進めた場合、撮像装置10は、レリーズ(シャッター解放)操作が行われたか否かを判定する(S118)。レリーズ操作が行われた場合、撮像装置10は、処理をステップS119に進める。一方、レリーズ操作が行われていない場合、撮像装置10は、処理をステップS101に戻す。
【0066】
処理をステップS119に進めた場合、撮像装置10は、Wobbling制御を実施したか否かを判定する(S119)。Wobbling制御を実施した場合、撮像装置10は、処理をステップS120に進める。一方、Wobbling制御を実施していない場合、撮像装置10は、処理をステップS121に進める。処理をステップS120に進めた場合、撮像装置10は、フォーカス駆動手段186の機能によりフォーカス位置を基準位置に戻し(S120)、処理をステップS121に進める。処理をステップS121に進めた撮像装置10は、レリーズ処理を実施する(S121)。
【0067】
以上、全体的な処理の流れについて説明した。
【0068】
(ズームトラッキング制御について)
次に、図7を参照しながら、図6のステップS105において実施するズームトラッキング制御に係る処理について説明する。なお、このズームトラッキング制御は、主に制御手段18の機能により実現される。
【0069】
フォーカス位置が同じ場合でも、光学系によっては、ズーミング操作によって現在の合焦距離(フォーカス距離)が変化してしまうことが多い。そのため、フォーカス距離がズーミング操作によって変化しないように、ズーム焦点距離に応じてフォーカス位置を変化させる制御処理(ズームトラッキング制御)が必要になる。そこで、撮像装置10は、ズーミング操作中であると判断した場合にズームトラッキング制御を実施する。
【0070】
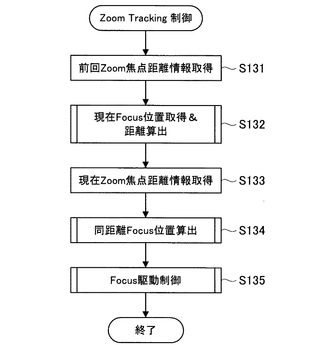
図7に示すように、ズームトラッキング制御を開始した撮像装置10は、まず、前回のズーム焦点距離の情報を記憶手段から取得する(S131)。次いで、撮像装置10は、現在のフォーカス位置を取得すると共に、フォーカス距離を算出する(S132)。このフォーカス距離は、前回撮影時におけるズーム焦点距離と今回撮影時におけるフォーカス位置から算出される。次いで、撮像装置10は、今回撮影時におけるズーム焦点距離の情報を取得する(S133)。次いで、撮像装置10は、今回撮影時に検出したズーム焦点距離と前回撮影時のフォーカス距離とに基づいて今回撮影時の目標とするフォーカス位置を算出する(S134)。次いで、撮像装置10は、今回撮影時のフォーカス位置と目標とするフォーカス位置との差分をフォーカス駆動量としてフォーカス駆動制御を実施する(S135)。
【0071】
以上、ズームトラッキング制御について説明した。
【0072】
(合焦位置及び合焦方向の算出方法について)
次に、図8を参照しながら、図6のステップS109において実施する合焦位置及び合焦方向の算出処理について説明する。なお、この算出処理は、主に制御手段18の機能により実現される。
【0073】
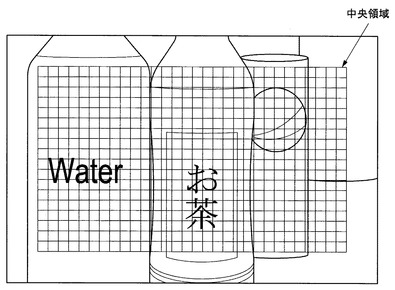
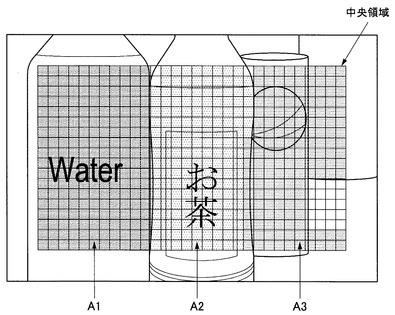
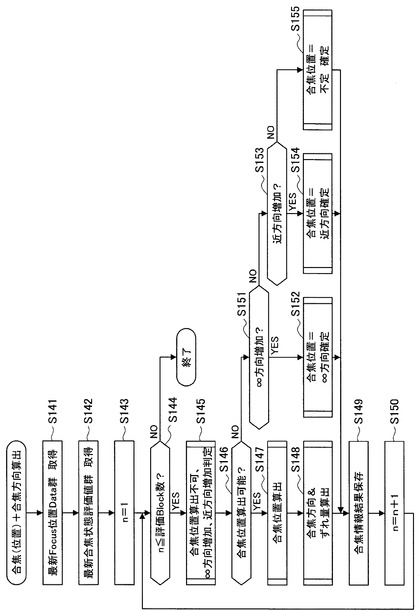
図8に示すように、合焦位置及び合焦方向の検出処理を開始した撮像装置10は、最新のフォーカス位置群を取得して記憶手段に記録する(S141)。また、撮像装置10は、最新の合焦状態評価値群を取得して記憶手段に記録する(S142)。なお、合焦状態評価値は、画像データを読み出しながら各ブロック(図2に示した中央領域の各分割領域)のコントラスト値に相当する評価値を算出した結果である。また、最新のフォーカス位置群及び最新の合焦状態評価値群としては、例えば、前々回撮影時の画像、前回撮影時の画像、今回撮影時の画像に対応する合焦位置及び合焦状態評価値が用いられる。
【0074】
次いで、撮像装置10は、パラメータnを1にリセットする(S143)。次いで、撮像装置10は、パラメータnがn≦評価ブロック数であるか否かを判定する(S144)。n≦評価ブロック数である場合、撮像装置10は、処理をステップS145に進める。一方、n≦評価ブロック数でない場合、撮像装置10は、合焦位置及び合焦方向の算出に係る一連の処理を終了する。なお、ステップS144〜S150の処理は、パラメータnをインクリメントさせながらブロックの位置を変えつつ、各ブロックについて実行される。
【0075】
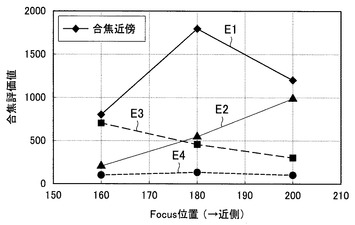
処理をステップS145に進めた場合、撮像装置10は、合焦位置の算出が不可である状態、∞方向側に合焦位置がある状態、近距離方向側に合焦位置がある状態の判定を実施する(S145)。まず、撮像装置10は、合焦位置の算出が可能であるか否かを判定する(S146)。合焦位置の算出が可能である場合(図3のE1)、撮像装置10は、処理をステップS147に進める。一方、合焦位置の算出が不可である場合(図3のE2〜E4)、撮像装置10は、処理をステップS151に進める。
【0076】
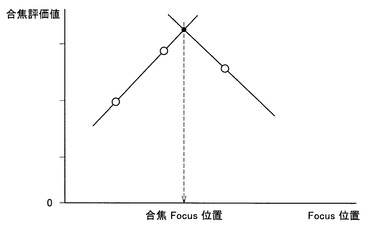
処理をステップS147に進めた場合、撮像装置10は、合焦位置を算出する(S147)。次いで、撮像装置10は、合焦方向及びずれ量を算出する(S148)。これら合焦位置及び合焦方向は、記憶手段に記録されたフォーカス位置群及び合焦状態評価値群を用いて算出される。例えば、図4に示すように、3つの合焦評価値の最大値に対応する点と3番目の値に対応する点とを結ぶ直線と、その直線の傾きを鏡像反転させて2番目の値に対応する点を通る直線と、の交点から合焦位置が算出される。
【0077】
一方、合焦方向を算出するためには、少なくとも3つのフォーカス位置における合焦状態評価値が必要である。なぜなら、合焦状態評価値は先鋭度を表しているので相対的に合焦に近づくほど高い値となるが、コントラストが小さい被写体を撮像する場合には合焦位置でも合焦状態評価値が大きくならないため、合焦状態が検出できないことによる。また、ぼけが大きい場合にも合焦状態評価値がほとんど変わらないため、合焦状態の検出ができない。
【0078】
さて、ステップS147、S148の処理を完了すると、撮像装置10は、処理をステップS149に進める。処理をステップS149に進めた場合、撮像装置10は、合焦位置及び合焦方向の検出結果を記憶手段に記録する(S149)。次いで、撮像装置10は、パラメータnを1だけインクリメントさせ(S150)、評価対象となるブロックを更新し、処理をステップS144に戻す。
【0079】
また、ステップS146において処理をステップS151に進めた場合、撮像装置10は、∞方向側に合焦位置がある状態か否かを判定する(S151)。∞方向側に合焦位置がある状態の場合(図3のE3)、撮像装置10は、処理をステップS152に進める。一方、∞方向側に合焦位置がない状態の場合(図3のE2及びE4)、撮像装置10は、処理をステップS153に進める。
【0080】
処理をステップS152に進めた場合、撮像装置10は、合焦位置を∞方向側に確定させ(S152)、処理をステップS149に進める。一方、処理をステップS153に進めた場合、撮像装置10は、近距離方向側に合焦位置がある状態か否かを判定する(S153)。近距離方向側に合焦位置がある状態の場合(図3のE2)、撮像装置10は、処理をステップS154に進める。一方、近距離方向側に合焦位置がない状態の場合(図3のE4)、撮像装置10は、処理をステップS155に進める。
【0081】
処理をステップS154に進めた場合、撮像装置10は、合焦位置を近距離方向側に確定させ(S154)、処理をステップS149に進める。一方、処理をステップS155に進めた場合、撮像装置10は、合焦位置が不定であることを確定させ、処理をステップS149に進める。このように、少なくとも3つのフォーカス位置における合焦状態評価値から合焦位置について4パターンのいずれかの属性を確定させることができる。なお、これら少なくとも3つのフォーカス位置は、合焦方向の検出を容易にするために、許容ピント範囲(被写界深度)以上離れた位置に設定される。
【0082】
以上、合焦位置及び合焦方向の算出方法について説明した。
【0083】
(フォーカス制御について)
次に、図9〜図11を参照しながら、図6のステップS112及びS115において実施するフォーカス制御について説明する。なお、本実施形態に係るフォーカス制御において特徴的な部分はWobbling動作にある。そこで、Wobbling動作が関係する制御処理を中心にして詳細に説明する。また、このフォーカス制御は、主に制御手段18の機能により実現される。
【0084】
(Wobbling制御量の算出方法)
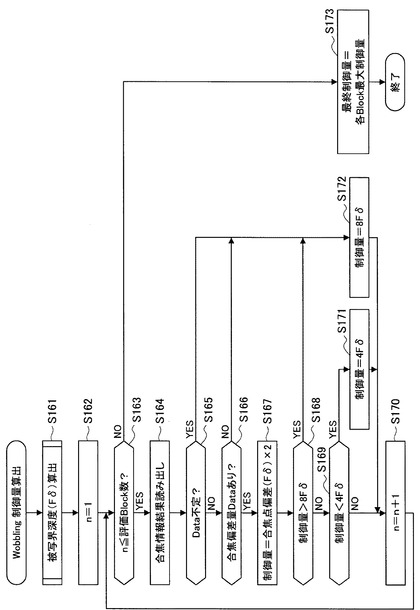
まず、図9を参照しながら、Wobbling制御量の算出方法について説明する。Wobbling動作は、現在の基準フォーカス位置に対して所定量だけ∞方向側にずれた位置と、近距離方向側に所定量(制御量)だけずれた位置とを順次往復させる動作である。ここでは、この制御量を算出する方法について説明する。
【0085】
図9に示すように、Wobbling制御量の算出を開始した撮像装置10は、被写界深度(Fδ)を算出する(S161)。被写界深度Fδは、イメージャ上のずれ量からF(絞り)×δ(許容錯乱円)により算出することができる。例えば、δ=15μmなどとなる。また、撮像装置10は、イメージャ上のずれ量に対するフォーカスずれ量の変換係数をズーム焦点距離に依存して予め保持しているものとする。次いで、撮像装置10は、パラメータnを1にリセットする(S162)。次いで、撮像装置10は、パラメータnがn≦評価ブロック数であるか否かを判定する(S163)。n≦評価ブロック数である場合、撮像装置10は、処理をステップS164に進める。一方、n≦評価ブロック数でない場合、撮像装置10は、処理をステップS173に進める。
【0086】
処理をステップS164に進めた場合、撮像装置10は、合焦位置及び合焦方向の検出結果を記憶手段から読み出す(S164)。次いで、撮像装置10は、合焦位置が不定であるか否かを判定する(S165)。合焦位置が不定である場合、撮像装置10は、処理をステップS172に進める。一方、合焦位置が不定ではない場合、撮像装置10は、処理をステップS166に進める。処理をステップS166に進めた場合、撮像装置10は、合焦偏差量のデータがあるか否かを判定する(S166)。合焦偏差量のデータがある場合、撮像装置10は、処理をステップS167に進める。一方、合焦偏差量のデータがない場合、撮像装置10は、処理をステップS172に進める。
【0087】
処理をステップS167に進めた場合、撮像装置10は、制御量を合焦点偏差(Fδ)×2に設定する(S167)。次いで、撮像装置10は、制御量が制御量>8Fδであるか否かを判定する(S168)。制御量>8Fδである場合、撮像装置10は、処理をステップS172に進める。一方、制御量>8Fδでない場合、撮像装置10は、処理をステップS169に進める。処理をステップS169に進めた場合、撮像装置10は、制御量が制御量<4Fδであるか否かを判定する(S169)。制御量<4Fδである場合、撮像装置10は、処理をステップS171に進める。一方、制御量<4Fδでない場合、撮像装置10は、処理をステップS170に進める。
【0088】
処理をステップS170に進めた場合、撮像装置10は、パラメータnを1だけインクリメントし(S170)、評価対象のブロックを更新し、処理をステップS163に戻す。また、ステップS169において処理をステップS171に進めた場合、撮像装置10は、制御量を4Fδに設定し(S171)、処理をステップS170に進める。また、ステップS165、S166、又はS168において処理をステップS172に進めた場合、撮像装置10は、制御量を8Fδに設定し(S172)、処理をステップS170に進める。また、ステップS163において処理をステップS173に進めた場合、撮像装置10は、最終制御量を各ブロックについて算出した制御量の最大値に設定し(S173)、Wobbling制御量の算出処理を終了する。
【0089】
以上、Wobbling制御量の算出方法について説明した。
【0090】
(Wobbling Focus駆動:第1の制御処理)
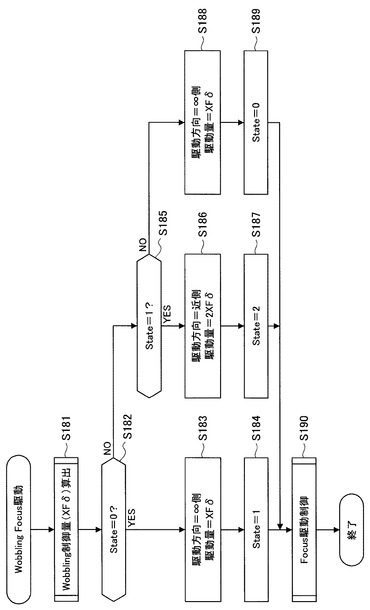
次に、図10を参照しながら、図6のステップS112において実施する第1の制御処理(Wobbling Focus駆動)について説明する。
【0091】
図10に示すように、Wobbling Focus駆動を開始した撮像装置10は、図9に示した方法でWobbling制御量(XFδ)を算出する(S181)。次いで、撮像装置10は、状態パラメータStateがState=0であるか否かを判定する(S182)。State=0である場合、撮像装置10は、処理をステップS183に進める。一方、State=0でない場合、撮像装置10は、処理をステップS185に進める。処理をステップS183に進めた場合、撮像装置10は、駆動方向を∞方向側に設定し、駆動量をXFδに設定する(S183)。次いで、撮像装置10は、状態パラメータStateをState=1に設定し(S184)、処理をステップS190に進める。
【0092】
また、ステップS182において処理をステップS185に進めた場合、撮像装置10は、State=1であるか否かを判定する(S185)。State=1である場合、撮像装置10は、処理をステップS186に進める。一方、State=1でない場合、撮像装置10は、処理をステップS188に進める。処理をステップS186に進めた場合、撮像装置10は、駆動方向を近距離方向側に設定し、駆動量を2XFδに設定する(S186)。次いで、撮像装置10は、状態パラメータStateをState=2に設定し(S187)、処理をステップS190に進める。
【0093】
また、ステップS185において処理をステップS188に進めた場合、撮像装置10は、駆動方向を∞方向側に設定し、駆動量をXFδに設定する(S188)。次いで、撮像装置10は、状態パラメータStateをState=0に設定し(S189)、処理をステップS190に進める。処理をステップS190に進めた撮像装置10は、設定した駆動方向及び駆動量でフォーカスレンズ113を駆動制御する(S190)。
【0094】
例えば、現在の基準フォーカス位置を180、絞り値を4、ズーム焦点距離に対応する変換係数を1/12とすると、8Fδ×(1/12)=40となり、3つのフォーカス位置は140、180、220となる。この場合、フォーカス位置は、基準フォーカス位置の180から∞方向側に8Fδだけ移動した140、近距離方向側に8Fδだけ移動した220の順で制御される。つまり、基準フォーカス位置から−40パルス分駆動し、次に+80パルス分駆動し、最後に−40パルス分駆動して元の位置に戻す制御が行われる。
【0095】
以上、第1の制御処理について説明した。
【0096】
(Wobbling+MF Focus駆動:第2の制御処理)
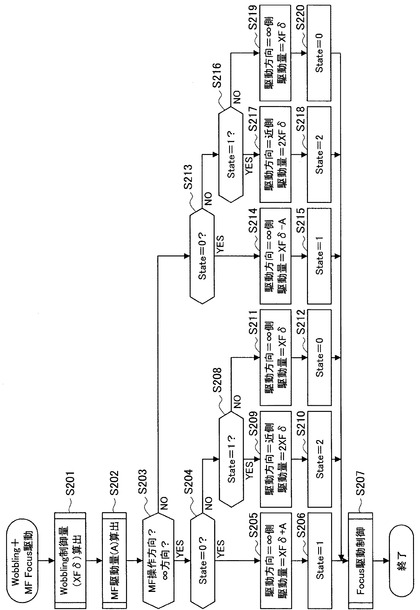
次に、図11を参照しながら、図6のステップS115において実施する第2の制御処理(Wobbling+MF Focus駆動)について説明する。
【0097】
マニュアルフォーカス操作があり、その操作量に応じた駆動量がWobblingによる制御幅(この例では40パルス)より少ない場合は、合焦状態検出に必要なフォーカス偏差量が得られないため、操作方向及び操作量に応じた駆動量をWobbling制御の駆動量に加算して駆動制御する方法が好ましい。第2の制御処理は、このような方法に関するものである。
【0098】
図11に示すように、Wobbling+MF Focus駆動を開始した撮像装置10は、Wobbling制御量(XFδ)を算出する(S201)。次いで、撮像装置10は、マニュアルフォーカス駆動量(A)を算出する(S202)。次いで、撮像装置10は、マニュアルフォーカス操作の方向が∞方向側であるか否かを判定する(S203)。マニュアルフォーカス操作の方向が∞方向側である場合、撮像装置10は、処理をステップS204に進める。一方、マニュアルフォーカス操作の方向が∞方向側でない場合、撮像装置10は、処理をステップS213に進める。
【0099】
処理をステップS204に進めた場合、撮像装置10は、状態パラメータStateがState=0であるか否かを判定する(S204)。State=0である場合、撮像装置10は、処理をステップS205に進める。一方、State=0でない場合、撮像装置10は、処理をステップS208に進める。処理をステップS205に進めた場合、撮像装置10は、駆動方向を∞方向側に設定し、駆動量をXFδ+Aに設定する(S205)。次いで、撮像装置10は、状態パラメータStateをState=1に設定し(S206)、処理をステップS207に進める。
【0100】
ステップS204において処理をステップS208に進めた場合、撮像装置10は、状態パラメータStateがState=1であるか否かを判定する(S208)。State=1である場合、撮像装置10は、処理をステップS209に進める。一方、State=1でない場合、撮像装置10は、処理をステップS211に進める。処理をステップS209に進めた場合、撮像装置10は、駆動方向を近距離方向側に設定し、駆動量を2XFδに設定する(S209)。次いで、撮像装置10は、状態パラメータStateをState=2に設定し(S210)、処理をステップS207に進める。
【0101】
ステップS208において処理をステップS211に進めた場合、撮像装置10は、駆動方向を∞方向側に設定し、駆動量をXFδに設定する(S211)。次いで、撮像装置10は、状態パラメータStateをState=0に設定し(S212)、処理をステップS207に進める。
【0102】
また、ステップS203において処理をステップS213に進めた場合、撮像装置10は、状態パラメータStateがState=0であるか否かを判定する(S213)。State=0である場合、撮像装置10は、処理をステップS214に進める。一方、State=0でない場合、撮像装置10は、処理をステップS216に進める。処理をステップS214に進めた場合、撮像装置10は、駆動方向を∞方向側に設定し、駆動量をXFδ−Aに設定する(S214)。次いで、撮像装置10は、状態パラメータStateをState=1に設定し(S215)、処理をステップS207に進める。
【0103】
また、ステップS213において処理をステップS216に進めた場合、撮像装置10は、状態パラメータStateがState=1であるか否かを判定する(S216)。State=1である場合、撮像装置10は、処理をステップS217に進める。一方、State=1でない場合、撮像装置10は、処理をステップS219に進める。処理をステップS217に進めた場合、撮像装置10は、駆動方向を近距離方向側に設定し、駆動量を2XFδに設定する(S217)。次いで、撮像装置10は、状態パラメータStateをState=2に設定し(S218)、処理をステップS207に進める。
【0104】
また、ステップS216において処理をステップS219に進めた場合、撮像装置10は、駆動方向を∞方向側に設定し、駆動量をXFδに設定する(S219)。次いで、撮像装置10は、状態パラメータStateをState=0に設定し(S220)、処理をステップS207に進める。上述したいずれかの流れに沿って処理をステップS207に進めた場合、撮像装置10は、設定した駆動方向及び駆動量でフォーカス位置を駆動制御する(S207)。
【0105】
以上、第2の制御処理について説明した。
【0106】
(MF Focus駆動:第3の制御処理)
上述した第2の制御処理は、マニュアルフォーカス操作による駆動量がWobblingによる制御幅よりも小さい場合であった。一方、マニュアルフォーカス操作による駆動量がWobblingによる制御幅(例えば、40パルス)より大きい場合には、撮影者の所望する合焦位置が現在のフォーカス位置近傍にない可能性が大きい。また、この場合には、Wobbling動作を行わなくても、マニュアルフォーカス操作による駆動によって合焦検出に十分な3つの異なるフォーカス位置が得られる。そのため、この場合にはWobbling制御を禁止した制御にする。このように、操作状態に応じてフォーカス制御を切り替えることで無駄な制御をなくして好適なフォーカス制御が実現される。
【0107】
以上、第3の制御処理について説明した。
【0108】
(パラメータの設定など)
上記の説明において、Wobbling制御量を40パルス(8Fδ)とする例を挙げたが、この40パルスという値は、合焦フォーカス位置から十分に離れた位置からでも合焦フォーカス位置を算出できるようにし、現在のフォーカス位置における合焦度合いを算出できるように設定された設定値である。
【0109】
また、上述したフォーカス制御によると、1ブロックの検出領域について一旦合焦フォーカス位置が検出され、マニュアルフォーカス操作によって更に合焦フォーカス位置に近づいた場合に、8Fδよりも少ないWobbling制御量で合焦フォーカス位置を算出することが可能になる。また、図9に示したように、現在のフォーカス偏差が4Fδ以下の場合、フォーカス偏差の2倍の量をWobbling制御量とするため、合焦フォーカス位置を算出するのに必要最小限の量でWobbling動作を実施することが可能になる。但し、制御量が小さすぎるとピーク検出が困難となるため、4Fδを最小制限量としている。また、複数ブロックを検出領域とする場合には、各ブロックについて算出されたWobbling制御量の中で最大の制御値を採用することで好適なWobbling動作が実現される。
【0110】
以上、本実施形態に係るフォーカス制御について説明した。
【0111】
(合焦状態の表示について)
次に、図12を参照しながら、図6のステップS111において実施される合焦状態の表示処理について説明する。
【0112】
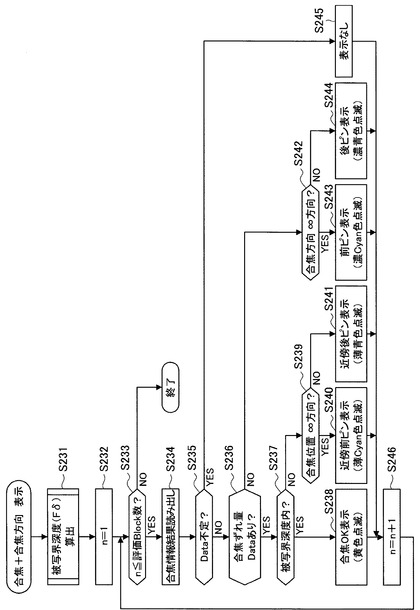
図12に示すように、合焦位置及び合焦方向の表示処理を開始した撮像装置10は、被写界深度(Fδ)を算出する(S231)。次いで、撮像装置10は、パラメータnをん=1に設定する(S232)。次いで、撮像装置10は、n≦評価ブロック数であるか否かを判定する(S233)。n≦評価ブロック数である場合、撮像装置10は、処理をステップS234に進める。一方、n≦評価ブロック数でない場合、撮像装置10は、合焦位置及び合焦方向の表示処理を終了する。
【0113】
処理をステップS234に進めた場合、撮像装置10は、合焦位置及び合焦方向の検出結果を記憶手段から読み出す(S234)。次いで、撮像装置10は、合焦位置が不定であるか否かを判定する(S235)。合焦位置が不定である場合、撮像装置10は、処理をステップS245に進める。一方、合焦位置が不定でない場合、撮像装置10は、処理をステップS236に進める。
【0114】
処理をステップS236に進めた場合、撮像装置10は、合焦ずれ量のデータがあるか否かを判定する(S236)。合焦ずれ量のデータがある場合、撮像装置10は、処理をステップS237に進める。一方、合焦ずれ量のデータがない場合、撮像装置10は、処理をステップS242に進める。
【0115】
処理をステップS237に進めた場合、撮像装置10は、合焦度合いが被写界深度内であるか否かを判定する(S237)。合焦度合いが被写界深度内である場合、撮像装置10は、処理をステップS238に進める。一方、合焦度合いが被写界深度内でない場合、撮像装置10は、処理をステップS239に進める。
【0116】
処理をステップS238に進めた場合、撮像装置10は、合焦OKである旨をLCD16に表示する(S238)。例えば、図5の領域A1について合焦度合いが被写界深度内(許容合焦点範囲内:1Fδ以内)である場合、撮像装置10は、領域A1の表示を黄色の点滅表示にする。
【0117】
また、ステップS237において処理をステップS239に進めた場合、撮像装置10は、合焦方向が∞方向側であるか否かを判定する(S239)。合焦方向が∞方向側である場合、撮像装置10は、処理をステップS240に進める。一方、合焦方向が∞方向側でない場合、撮像装置10は、処理をステップS241に進める。
【0118】
処理をステップS240に進めた場合、撮像装置10は、近傍前ピン状態である旨をLCD16に表示する(S240)。例えば、図5の領域A2について近傍前ピン状態である場合、撮像装置10は、領域A2の表示を薄いシアン色の点滅表示にする。一方、処理をステップS241に進めた場合、撮像装置10は、近傍後ピン状態である旨をLCD16に表示する(S241)。例えば、図5の領域A3について近傍後ピン状態である場合、撮像装置10は、領域A3の表示を薄い青色の点滅表示にする。
【0119】
また、ステップS236において処理をステップS242に進めた場合、撮像装置10は、合焦方向が∞方向側であるか否かを判定する(S242)。合焦方向が∞方向側である場合、撮像装置10は、処理をステップS243に進める。一方、合焦方向が∞方向側でない場合、撮像装置10は、処理をステップS244に進める。
【0120】
処理をステップS243に進めた場合、撮像装置10は、前ピン状態である旨をLCD16に表示する(S243)。例えば、図5の領域A2について前ピン状態である場合、撮像装置10は、領域A2の表示を濃いシアン色の点滅表示にする。一方、処理をステップS244に進めた場合、撮像装置10は、後ピン状態である旨をLCD16に表示する(S244)。例えば、図5の領域A3について後ピン状態である場合、撮像装置10は、領域A3の表示を濃い青色の点滅表示にする。
【0121】
また、ステップS235において処理をステップS245に進めた場合、撮像装置10は、LCD16に合焦状態を示す表示をせず(S245)、処理をステップS246に進める。また、ステップS240、S241、S243、S244のいずれかの処理が完了した後も、撮像装置10は、処理をステップS246に進める。処理をステップS246に進めた撮像装置10は、パラメータnを1だけインクリメントし(S246)、評価領域を更新し、処理をステップS233に戻す。
【0122】
以上、合焦状態の表示方法について説明した。このように、表示形態を合焦状態に応じて変えることで、各ブロックに対して許容合焦範囲内かどうかや、合焦するためのマニュアルフォーカス操作方向を撮影者に告知することができる。なお、表示色や点滅の有無など、表現方法は上記の例に限定されない。また、ここでは表示による合焦状態の通知方法について説明したが、音声や振動などを利用して合焦状態を通知するように構成することも可能である。さらに、フォーカスリング111に合焦方向に応じた微少な回転を加えて合焦状態を通知するように構成されていてもよい。
【0123】
(合焦位置及び操作方向の妥当性表示について)
次に、図13を参照しながら、図6のステップS113において実施する合焦位置及び操作方向の妥当性を表示する処理について説明する。
【0124】
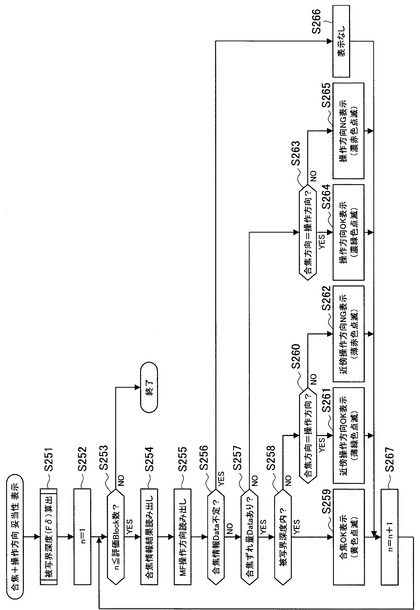
図13に示すように、合焦位置及び操作方向の妥当性の表示処理を開始した撮像装置10は、被写界深度(Fδ)を算出する(S251)。次いで、撮像装置10は、パラメータnを1にリセットする(S252)。次いで、撮像装置10は、n≦評価ブロック数であるか否かを判定する(S253)。n≦評価ブロック数である場合、撮像装置10は、処理をステップS254に進める。一方、n≦評価ブロック数でない場合、撮像装置10は、合焦位置及び操作方向の妥当性を表示する処理を終了する。
【0125】
処理をステップS254に進めた場合、撮像装置10は、合焦位置及び合焦方向の検出結果を記憶手段から読み出す(S254)。次いで、撮像装置10は、マニュアルフォーカス操作の方向を記憶手段から読み出す(S255)。次いで、撮像装置10は、合焦位置が不定であるか否かを判定する(S256)。合焦位置が不定である場合、撮像装置10は、処理をステップS266に進める。合焦位置が不定でない場合、撮像装置10は、処理をステップS257に進める。
【0126】
処理をステップS257に進めた場合、撮像装置10は、合焦ずれ量のデータがあるか否かを判定する(S257)。合焦ずれ量のデータがある場合、撮像装置10は、処理をステップS258に進める。一方、合焦ずれ量のデータがない場合、撮像装置10は、処理をステップS263に進める。
【0127】
処理をステップS258に進めた場合、撮像装置10は、合焦度合いが被写界深度内であるか否かを判定する(S258)。合焦度合いが被写界深度内である場合、撮像装置10は、処理をステップS259に進める。一方、合焦度合いが被写界深度内でない場合、撮像装置10は、処理をステップS260に進める。
【0128】
処理をステップS259に進めた場合、撮像装置10は、合焦OKである旨をLCD16に表示する(S259)。例えば、図5の領域A1について合焦度合いが被写界深度内(許容合焦点範囲内:1Fδ以内)である場合、撮像装置10は、領域A1の表示を黄色の点滅表示にする。
【0129】
処理をステップS260に進めた場合、撮像装置10は、合焦方向と操作方向とが一致しているか否かを判定する(S260)。合焦方向と操作方向とが一致している場合、撮像装置10は、処理をステップS261に進める。一方、合焦方向と操作方向とが一致していない場合、撮像装置10は、処理をステップS262に進める。
【0130】
処理をステップS261に進めた場合、撮像装置10は、近傍操作方向OKである旨をLCD16に表示する(S261)。例えば、図5の領域A2について近傍操作方向OKである場合、撮像装置10は、領域A2の表示を薄い緑色の点滅表示にする。一方、処理をステップS262に進めた場合、撮像装置10は、近傍操作方向NGである旨をLCD16に表示する(S262)。例えば、図5の領域A3について近傍操作方向NGである場合、撮像装置10は、領域A3の表示を薄い赤色の点滅表示にする。
【0131】
また、ステップS257において処理をステップS263に進めた場合、撮像装置10は、合焦方向と操作方向とが一致しているか否かを判定する(S263)。合焦方向と操作方向とが一致している場合、撮像装置10は、処理をステップS264に進める。一方、合焦方向と操作方向とが一致していない場合、撮像装置10は、処理をステップS265に進める。
【0132】
処理をステップS264に進めた場合、撮像装置10は、操作方向OKである旨をLCD16に表示する(S264)。例えば、図5の領域A2について操作方向OKである場合、撮像装置10は、領域A2の表示を濃い緑色の点滅表示にする。一方、処理をステップS265に進めた場合、撮像装置10は、操作方向NGである旨をLCD16に表示する(S265)。例えば、図5の領域A3について操作方向NGである場合、撮像装置10は、領域A3の表示を濃い赤色の点滅表示にする。
【0133】
また、ステップS256において処理をステップS266に進めた場合、撮像装置10は、LCD16に合焦状態及び操作方向の妥当性を示す表示をせず(S266)、処理をステップS267に進める。また、ステップS261、S262、S264、S265のいずれかの処理が完了した後も、撮像装置10は、処理をステップS267に進める。処理をステップS267に進めた撮像装置10は、パラメータnを1だけインクリメントし(S267)、評価領域を更新し、処理をステップS253に戻す。
【0134】
以上、合焦状態及び操作方向の妥当性に関する表示方法について説明した。このように、表示形態を合焦状態及び操作方向の妥当性に応じて変えることで、マニュアルフォーカス操作方向が合焦に向かっているかを撮影者に告知することができる。なお、表示色や点滅の有無など、表現方法は上記の例に限定されない。また、ここでは表示による合焦状態の通知方法について説明したが、音声や振動などを利用して合焦状態を通知するように構成することも可能である。さらに、フォーカスリング111に合焦方向に応じた微少な回転を加えて合焦状態を通知するように構成されていてもよい。
【0135】
(その他)
上記説明においては、30×18に分割した小さなブロック群の各ブロックについて独立して表示を行う例を示したが、撮影者が指定した任意の1つのブロックを評価対象ブロックにしてもよい。また、上記説明において表示形態を6パターン例示したが、合焦度合いを更に細かく分類し、その分類数に応じて表示を細かくしてもよい。また、上記説明において3つのフォーカス位置を利用したが、4つ以上のフォーカス位置を利用してもよい。このような変形についても、当然に本実施形態の技術的範囲に属する。
【0136】
以上、添付図面を参照しながら本発明の好適な実施形態について説明したが、本発明は係る例に限定されないことは言うまでもない。当業者であれば、特許請求の範囲に記載された範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、それらについても当然に本発明の技術的範囲に属するものと了解される。
【符号の説明】
【0137】
10 撮像装置
11 撮像光学系
111 ズームリング
112 絞り
113 フォーカスレンズ
114 ズームレンズ
115 フォーカスリング
12 撮像素子
13 画像信号処理回路
131 合焦状態評価値算出手段
132 表示画像合成手段
14 VRAM
15 LCDドライバ
16 LCD
17 メモリ
18 制御手段(CPU)
181 ズーム焦点距離算出手段
182 フォーカス一検出手段
183 フォーカス距離算出手段
184 マニュアルフォーカス操作状態検出手段
185 合焦位置・方向算出手段
186 フォーカス駆動制御手段
19 操作部材
20 タイミングジェネレータ
21 フォーカス駆動手段
22 絞り駆動手段
【技術分野】
【0001】
本発明は、撮像装置、及び撮像装置における制御方法に関する。
【背景技術】
【0002】
従来より、画像から焦点検出する技術が知られている。例えば、Wobbling制御を行い、合焦位置を検出する技術が知られている。また、合焦位置を撮影者に知らせる技術も知られている。例えば、下記の特許文献1には、Wobbling制御により複数のフォーカス位置で撮像された画像から焦点状態を検出し、検出した焦点状態に基づいて合焦位置を表示する技術が記載されている。また、下記の特許文献2には、リアルタイム表示用の画像ではなく、焦点検出用に撮像を行い、その撮像により得られた画像を利用して焦点検出を行う技術が記載されている。さらに、下記の特許文献3には、山登りオートフォーカス方式におけるマニュアルフォーカス操作時に合焦評価値を視覚的に表示する技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平5−308552号公報
【特許文献2】特開2010−160269号公報
【特許文献3】特開2007−279677号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記の特許文献1〜3においては、マニュアルフォーカス操作時に、フォーカスリングの操作状態及び合焦度合いに応じてフォーカス制御を行う構成については言及されていない。そのため、同文献に記載の技術を用いても、マニュアルフォーカスモードにおいて、撮影者が合焦状態を得るために操作すべき方向を知ることができない。例えば、合焦状態を表示するだけでは、結局、撮影者がフォーカスリングを回転させて合焦位置を探索する操作を行う必要が生じてしまう。
【0005】
そこで、本発明は、上記問題に鑑みてなされたものであり、本発明の目的とするところは、ベストフォーカス位置を通り過ぎて戻す操作をしなくても容易に合焦させることが可能なマニュアルフォーカスの補助機能を提供することが可能な、新規かつ改良された撮像装置、及び撮像装置における制御方法を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明のある観点によれば、複数の異なるフォーカス位置における撮像画像から合焦状態を検出し、合焦フォーカス位置と合焦近傍度合いとを算出する合焦評価手段と、撮影者のマニュアルフォーカス操作の状態を検出する状態検出手段と、を有し、前記合焦評価手段が算出した合焦近傍度合いと前記状態検出手段が検出したマニュアルフォーカス操作の状態とに応じて前記合焦状態を検出するためのフォーカス制御を異ならせる、撮像装置が提供される。
【0007】
かかる構成によると、マニュアルフォーカス操作中においても、フォーカス位置付近における合焦方向が算出されるため、例えば、この合焦方向を撮影者に通知したり、この合焦方向にフォーカスリングを駆動制御したりすることにより、撮影者が容易に正しい合焦フォーカス位置を得ることが可能になる。その結果、熟練した撮影者でなくとも、マニュアルフォーカス操作で素早く容易に合焦フォーカス位置を得ることが可能になる。また、熟練した撮影者でも、合焦フォーカス位置を得るための補助情報が示されるため、合焦フォーカス位置が判別しにくい被写体を撮影するシーンなどにおいて撮影操作を容易化することが可能になる。
【0008】
また、上記の撮像装置は、前記フォーカス制御を実施するフォーカス制御手段をさらに備えていてもよい。この場合、前記フォーカス制御手段は、フォーカスリングの回転移動量が所定の閾値を下回る場合に定期的に前記フォーカスレンズをウォブリング動作させ、前記フォーカスリングの回転移動量が所定の閾値を上回る場合には前記フォーカスレンズをウォブリング動作させないように構成されていてもよい。かかる構成により、無駄なウォブリング動作(例えば、大きくフォーカスリングを回転している最中に微妙な合焦点の探索をすることはないため、このような場合にウォブリング動作は無駄である。)が抑制され、駆動電力の低減、駆動部材の摩耗防止、電気系統の耐久性向上などの効果が得られる。
【0009】
また、前記フォーカス制御手段は、少なくとも絞り値及び前記合焦度合いに応じて決定される移動量にて前記フォーカスレンズをウォブリング動作させることが好ましい。
【0010】
また、前記フォーカス制御手段は、ズーミング操作が行われている場合に前記フォーカスレンズをウォブリング動作させないことが好ましい。かかる構成により、無駄なウォブリング動作(例えば、ズーミング操作中は合焦フォーカス位置が変化してしまうため、このような場合において合焦方向を探索するウォブリング動作は無駄である。)が抑制され、駆動電力の低減、駆動部材の摩耗防止、電気系統の耐久性向上などの効果が得られる。
【0011】
また、上記の撮像装置は、前記合焦近傍度合いを示す情報を画面に表示する情報表示手段をさらに備えていてもよい。かかる構成により、マニュアルフォーカス操作中において撮影者が合焦近傍度合いを確認しながら操作量を調整することが可能になる。
【0012】
また、前記情報表示手段は、ズーミング操作が行われている場合に前記合焦近傍度合いに関する情報を画面に表示しないように構成されていてもよい。ズーミング操作中は合焦フォーカス位置が変化してしまうため、このような場合において合焦近傍度合いを表示することは、あまり意味がない。一方で、ズーミング操作中に合焦近傍度合いを表示しないようにすることで、表示や合焦近傍度合いの逐次的な演算に要する消費電力を抑制することが可能になる。
【0013】
また、前記合焦評価手段は、分割された複数の撮像領域毎に合焦近傍度合いを検出し、前記情報表示手段は、前記撮像領域毎に検出された合焦近傍度合いを示す情報を前記各撮像領域に対応する画面領域に表示するように構成されていてもよい。かかる構成により、被写体のどの領域が合焦フォーカス位置に近い状態になっているのかを容易に把握することが可能になる。
【0014】
また、前記情報表示手段は、合焦している撮像領域に対応する画面領域の表示を強調するように構成されていてもよい。かかる構成により、被写体のどの領域が合焦しているのかを容易に認識することが可能になる。
【0015】
また、上記課題を解決するために、本発明の別の観点によれば、複数の異なるフォーカス位置における撮像画像から合焦状態を検出し、合焦フォーカス位置と合焦近傍度合いとを算出する合焦評価工程と、撮影者のマニュアルフォーカス操作の状態を検出する状態検出工程と、を含み、前記合焦評価工程で算出した合焦近傍度合いと前記状態検出工程で検出したマニュアルフォーカス操作の状態とに応じて前記合焦状態を検出するためのフォーカス制御を異ならせる、撮像装置における制御方法が提供される。
【0016】
かかる構成によると、マニュアルフォーカス操作中においても、合焦位置付近における合焦方向が算出されるため、例えば、この合焦方向を撮影者に通知したり、この合焦方向にフォーカスリングを駆動制御したりすることにより、撮影者が容易に正しい合焦フォーカス位置を得ることが可能になる。その結果、熟練した撮影者でなくとも、マニュアルフォーカス操作で素早く容易に合焦フォーカス位置を得ることが可能になる。また、熟練した撮影者でも、合焦フォーカス位置を得るための補助情報が示されるため、合焦フォーカス位置が判別しにくい被写体を撮影するシーンなどにおいて撮影操作を容易化することが可能になる。
【0017】
上記の制御方法は、前記フォーカス制御を実施するフォーカス制御工程をさらに含んでいてもよい。この場合、前記フォーカス制御工程では、フォーカスリングの回転移動量が所定の閾値を下回る場合に定期的に前記フォーカスレンズをウォブリング動作させ、前記フォーカスリングの回転移動量が所定の閾値を上回る場合には前記フォーカスレンズをウォブリング動作させないように制御してもよい。かかる構成により、無駄なウォブリング動作(例えば、大きくフォーカスリングを回転している最中に微妙な合焦点の探索をすることはないため、このような場合にウォブリング動作は無駄である。)が抑制され、駆動電力の低減、駆動部材の摩耗防止、電気系統の耐久性向上などの効果が得られる。
【0018】
また、前記フォーカス制御工程では、少なくとも絞り値及び前記合焦近傍度合いに応じて決定される移動量にて前記フォーカスレンズをウォブリング動作させるように制御してもよい。
【0019】
また、前記フォーカス制御工程では、ズーミング操作が行われている場合に前記フォーカスレンズをウォブリング動作させないように制御してもよい。かかる構成により、無駄なウォブリング動作(例えば、ズーミング操作中は合焦フォーカス位置が変化してしまうため、このような場合において合焦方向を探索するウォブリング動作は無駄である。)が抑制され、駆動電力の低減、駆動部材の摩耗防止、電気系統の耐久性向上などの効果が得られる。
【0020】
また、上記の撮像装置における制御方法は、前記合焦近傍度合いを示す情報を画面に表示する情報表示工程をさらに含んでいてもよい。かかる構成により、マニュアルフォーカス操作中において撮影者が合焦近傍度合いを確認しながら操作量を調整することが可能になる。
【0021】
また、前記情報表示工程では、ズーミング操作が行われている場合に前記合焦近傍度合いを示す情報を画面に表示しないように制御してもよい。ズーミング操作中は合焦フォーカス位置が変化してしまうため、このような場合において合焦近傍度合いを表示することは、あまり意味がない。一方で、ズーミング操作中に合焦近傍度合いを表示しないようにすることで、表示や合焦近傍度合いの逐次的な演算に要する消費電力を抑制することが可能になる。
【0022】
また、前記合焦評価工程では、分割された複数の撮像領域毎に合焦近傍度合いを検出し、前記情報表示工程では、前記撮像領域毎に検出された合焦近傍度合いを示す情報を前記各撮像領域に対応する画面領域に表示するように制御してもよい。かかる構成により、被写体のどの領域が合焦に近い状態になっているのかを容易に把握することが可能になる。
【0023】
また、前記情報表示工程では、合焦している撮像領域に対応する画面領域の表示を強調するように制御してもよい。かかる構成により、被写体のどの領域が合焦しているのかを容易に認識することが可能になる。
【発明の効果】
【0024】
以上説明したように本発明によれば、ベストフォーカス位置を通り過ぎて戻す操作をしなくても容易に合焦させることが可能なマニュアルフォーカスの補助機能を提供することが可能になる。
【図面の簡単な説明】
【0025】
【図1】本発明の一実施形態に係る撮像装置の構成例を示した図である。
【図2】同実施形態に係る撮像装置の制御方法について説明するための説明図である。
【図3】同実施形態に係る撮像装置の制御方法について説明するための説明図である。
【図4】同実施形態に係る撮像装置の制御方法について説明するための説明図である。
【図5】同実施形態に係る撮像装置の制御方法について説明するための説明図である。
【図6】同実施形態に係る撮像装置の制御方法について説明するための説明図である。
【図7】同実施形態に係る撮像装置の制御方法について説明するための説明図である。
【図8】同実施形態に係る撮像装置の制御方法について説明するための説明図である。
【図9】同実施形態に係る撮像装置の制御方法について説明するための説明図である。
【図10】同実施形態に係る撮像装置の制御方法について説明するための説明図である。
【図11】同実施形態に係る撮像装置の制御方法について説明するための説明図である。
【図12】同実施形態に係る撮像装置の制御方法について説明するための説明図である。
【図13】同実施形態に係る撮像装置の制御方法について説明するための説明図である。
【発明を実施するための形態】
【0026】
以下に添付図面を参照しながら、本発明の好適な実施の形態について詳細に説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
【0027】
<実施形態>
本発明の一実施形態について説明する。本実施形態は、マニュアルフォーカスモードにおいて操作状態や合焦度合いに応じてフォーカス制御を切り替える構成に特徴がある。以下では、まず、本実施形態に係る撮像装置10の全体的な構成について簡単に説明した後、本実施形態に係る特徴的な撮像装置10の制御動作について詳細に説明する。
【0028】
[撮像装置10の構成]
まず、図1を参照しながら、本実施形態に係る撮像装置10の構成例について説明する。図1は、本実施形態に係る撮像装置10の構成例を示した説明図である。
【0029】
図1に示すように、撮像装置10は、主に、撮像光学系11と、撮像素子12と、画像信号処理回路13と、VRAM14と、LCDドライバ15と、LCD16と、メモリ17と、制御手段18と、操作部材19と、タイミングジェネレータ20と、フォーカス駆動手段21と、絞り駆動手段22と、により構成される。
【0030】
なお、説明の都合上、撮像素子12としてCMOS(Complementary Metal Oxide Semiconductor)を想定し、表示手段としてLCD(Liquid Crystal Display)を想定するが、本実施形態に係る撮像装置10の構成はこれに限定されない。例えば、CMOSに代えてCCD(Charge Coupled Device)を用いることも可能である。また、LCDに代えてELD(Electro−Luminescence Display)を用いることも可能である。
【0031】
(電源投入時の動作概要)
撮像装置10は、電源がオンにされると同時に撮像素子12を制御し、一定間隔(例えば、1/60秒単位:以後、この単位を1frameと呼ぶ)で露光及び画像データの読み出しを実行する。この画像データは、リアルタイムでLCD16に表示される。また、撮像装置10は、画像データから被写体の輝度値を算出し、撮像した画像が適正な明るさになるように絞り、露光時間、及びゲイン値を制御する。本実施形態に係る撮像装置10は、このような動作に加え、マニュアルフォーカスモードにおいて撮影者が合焦位置を検出するために利用可能な補助的機能を搭載している。この補助的機能は、主に制御手段18の機能により実現される。以下では、当該補助的機能を含め、撮像装置10の全体的な機能構成について詳細に説明する。
【0032】
(撮像光学系11)
撮像光学系11は、主に、ズームレンズ114、絞り112、フォーカスレンズ113などにより構成される。撮像光学系11は、外光を撮像素子12に結像させる光学系システムであり、被写体からの光を撮像素子12まで透過させる。ズームレンズ114は、焦点距離を変化させて画角を変化させるレンズである。ズームレンズ114の位置は、ズームリング115を手動で回転させることにより調整可能である。
【0033】
絞り112は、透過する光量を調節する機構である。また、絞り112は、制御手段18による制御に応じて絞り駆動手段22により駆動される。フォーカスレンズ113は、その位置の移動により撮像素子12の撮像面に被写体像を合焦させる。また、フォーカスレンズ113は、制御手段18による制御に応じてフォーカス駆動手段により駆動されるか、或いは、フォーカスリング115を手動で回転することにより駆動される。
【0034】
(撮像素子12)
撮像素子12は、撮像光学系11を透過して入射した光を電気信号に変換する光電変換が可能な光電変換素子である。なお、図中には明示していないが、撮像素子12の後段には、CDS/AMP(相関二重サンプリング回路(correlated double sampling)/増幅器(amplifier))回路やA/Dコンバータなどが設けられる。
【0035】
CDS/AMP回路は、撮像素子12から出力された電気信号に含まれる低周波ノイズを除去すると共に、電気信号を任意のレベルまで増幅する。A/Dコンバータは、CDS/AMP回路から出力された電気信号をデジタル変換してデジタル信号を生成する。これら撮像素子12やCDS/AMP回路は、タイミングジェネレータ20から出力されるタイミング信号に応じて駆動する。例えば、撮像素子12の露光期間や電荷の読み出しタイミングなどは、タイミングジェネレータ20から出力されるタイミング信号に応じて制御される。
【0036】
(画像信号処理回路13)
撮像素子12などを通じて出力されたデジタル信号は、画像信号処理回路13に入力される。画像信号処理回路13は、入力されたデジタル信号に対して処理を施し、画像処理が可能となる画像データを生成する。例えば、画像信号処理回路13は、デジタル信号に対してホワイトバランス調整、γ値調整、輪郭強調制御などを施して画像データを生成する。また、画像信号処理回路13は、合焦状態評価値算出手段131の機能により、画像データから合焦状態評価値を算出する。この合焦状態評価値は、所定の画像領域における被写体の先鋭度を表すものである。複数のフォーカス位置で撮像された画像データの合焦状態評価値を用いると、合焦度合いを評価することが可能である。この合焦状態評価値は、制御手段18に入力される。
【0037】
また、画像信号処理回路13は、画像データの圧縮/伸張などの処理を実行する。例えば、画像信号処理回路13は、JPEG圧縮形式やLZW圧縮形式などの圧縮形式で画像データを圧縮し、圧縮後の画像データをメモリ17に格納する。また、画像信号処理回路13は、メモリ17から読み出した圧縮後の画像データを読み出し、読み出した圧縮後の画像データを伸張する。また、画像信号処理回路13は、LCD16に画像データを表示させる。さらに、画像信号処理回路13は、表示画像合成手段132の機能により、合焦状態などを示す表示内容を画像に合成して表示させる。なお、こうして得られた表示画像データはVRAM14に格納される。
【0038】
(VRAM14、LCDドライバ15、LCD16)
VRAM(Video RAM)14は、画像表示用メモリであり、複数のチャネルを有する。そのため、VRAM14は、メモリ17から表示画像データを入力する処理と、LCDドライバ15へと画像データを出力する処理とを同時に実行できる。また、VRAM14の容量は、LCD16の解像度や最大発色数に依存する。
【0039】
VRAM14に格納された表示画像データは、LCDドライバ15により読み出される。LCDドライバ15は、VRAM14から読み出した表示画像データをLCD16に表示する。なお、LCD16に表示される画像データとしては、例えば、撮像操作に応じて撮影された表示画像データ、撮像操作前のライブビュー表示用画像データ、各種設定画面やGUIなどの画像データ、メモリ17又は記録媒体(非図示)に格納された画像データなどがある。
【0040】
(メモリ17)
メモリ17としては、例えば、SDRAM(synchronous DRAM)などを用いることができる。このメモリ17は、画像データを一時的に保存するために利用される。なお、メモリ17は、複数の画像データを記憶できるだけの記憶容量を有している。また、メモリ17は、フォーカス制御時の画像データを順次保持するために利用される。さらに、メモリ17には、制御手段18の制御用プログラムなどが格納されることもある。メモリ17に対する画像データの書き込み/読み出しは、例えば、画像信号処理回路13により制御される。
【0041】
(メディアコントローラ(非図示))
図1には明示していないが、撮像装置10には、通常、固定又は着脱可能な記録メディア、及び記録メディアに対する画像データの書き込み/読み出しを制御するためのメディアコントローラが搭載されている。このメディアコントローラは、記録メディアに対する画像データの書き込み/書き込み制御の他、設定情報の読み出し/書き込み制御などを実行する。なお、記録メディアとしては、例えば、光ディスク(CD、DVD、BDなど)、光磁気ディスク、磁気ディスク、半導体記憶媒体などがある。
【0042】
(操作部材19)
ところで、撮像開始の操作や各種設定の操作は、操作部材19を用いて行われる。操作部材19としては、例えば、上下左右キー(十字キー)、電源スイッチ、モードダイアル、レリーズボタンなどがある。操作部材19が操作されると、その操作に応じて操作信号が制御手段18に入力される。例えば、レリーズボタンが半押しされると、フォーカス制御開始の操作信号が制御手段18に入力され、制御手段18によるフォーカス制御が開始する。また、レリーズボタンの半押しが解除されると、フォーカス制御終了の操作信号が制御手段18に入力され、制御手段18によるフォーカス制御が終了する。また、レリーズボタンが全押しされた場合、撮像開始の操作信号が制御手段18に入力される。
【0043】
(制御手段18)
以下、制御手段18が有する機能について説明する。
【0044】
制御手段18は、適正露光算出機能を有する。この機能は、画像信号処理回路13により画像データの輝度値に基づいて算出されるAE(Auto Exposure:自動露光)評価値から、絞り112の絞り量やシャッター速度の適正値を算出する機能である。適正露光算出機能により絞り量を算出すると、制御手段18は、算出した絞り量となるように絞り駆動手段22を制御して絞り112を駆動させる。なお、制御手段18は、絞り112と同時に露光時間やゲイン値などを制御するように構成されていてもよい。
【0045】
また、制御手段18は、フォーカス制御機能を有する。この機能により実現される処理内容は、オートフォーカスモードにおいて操作部材19からフォーカス制御開始の操作信号を受けた場合(AF時動作)と、マニュアルフォーカスモードにおいてフォーカスリング115が回転された場合(MF時動作)とで異なる。
【0046】
まず、AF時動作について説明する。
【0047】
フォーカス制御開始の操作信号を受けると、制御手段18は、画像信号処理回路13により画像データの輝度値に基づいて算出されるAF(auto focus:自動焦点)評価値に基づいて、フォーカスレンズ113の合焦位置を算出する。なお、AF評価値は、例えば、コントラスト検出方式を採用した場合、コントラスト値がピークとなるフォーカス位置を合焦位置として合焦位置から離れる程低くなる。つまり、コントラスト値がピークとなるフォーカス位置を検出し、検出したフォーカス位置を合焦位置と判断するのである。合焦位置を算出すると、制御手段18は、フォーカス位置を合焦位置に合うように、フォーカス駆動手段21を制御してフォーカスレンズ113の位置を移動させる。
【0048】
次に、MF時動作について説明する。本実施形態に係る撮像装置10の特徴的な機能の1つは、MF時動作における制御手段18の動作にある。以下、制御手段18のMF時動作について説明する。
【0049】
図1に示すように、制御手段18は、主に、ズーム焦点距離算出手段181と、フォーカス位置検出手段182と、フォーカス距離算出手段183と、マニュアルフォーカス操作状態検出手段184と、合焦位置・方向算出手段185と、フォーカス駆動制御手段186とを有する。
【0050】
(ズーム焦点距離算出手段181)
撮像光学系11が単焦点レンズで構成されている場合は焦点距離に変化はないが、撮像装置10のようにズームレンズ114を搭載している場合、撮影者のズーミング操作(ズームリング111の回転操作)によって焦点距離(以下、ズーム焦点距離)が変化してしまう。そこで、ズーム焦点距離算出手段181は、例えば、ズームリング111の回転に連動して出力される可変抵抗器の出力値からズーム焦点距離を検出する。より具体的には、ズーム焦点距離算出手段181が、ズームリング111の回転位置に連動する可変抵抗器の抵抗値をA/D変換した後、予め用意しておいた抵抗値とズーム焦点距離との対応関係を示す対応データに基づいてズーム焦点距離を検出する。
【0051】
このようにして検出されたズーム焦点距離は、メモリ17又は制御手段18に設けられた記憶手段(非図示)に一時的に格納される。また、前回撮像時のズーム焦点距離と、今回撮像時のズーム焦点距離とを比較し、両者の差が所定以上であるか否かを判定することで、ズーミング操作の有無を検出することができる。
【0052】
(フォーカス位置検出手段182、フォーカス距離算出手段183)
フォーカス位置検出手段182は、撮像装置10の起動時に、フォーカス位置がOver∞となる位置までフォーカスレンズ113の位置を移動させる。フォーカス位置がOver∞となるフォーカスレンズ113の位置検出は、例えば、その位置にフォーカスレンズ113が達した際に電気的に短絡する接点を設けておき、その短絡状態を検出することにより実現可能である。Over∞位置までフォーカスレンズ113を移動させた後、フォーカス位置検出手段182は、近方向側にフォーカスレンズ113を駆動し、短絡状態から非短絡状態への状態変化を検出する。そして、フォーカス位置検出手段182は、検出したタイミングにおけるフォーカス位置を基準位置に設定する。
【0053】
また、フォーカス位置検出手段182は、基準位置からフォーカスレンズ113を移動した際のアクチュエータ(ステッピングモータ)の駆動パルス量で定義されるフォーカス位置を検出する。フォーカス位置検出手段182により検出されたフォーカス位置は、フォーカス距離算出手段183に入力される。フォーカス位置が入力されると、フォーカス位置算出手段183は、入力されたフォーカス位置とズーム焦点距離とに基づいてフォーカス距離を算出する。例えば、フォーカス距離算出手段183は、ズーム焦点距離毎にフォーカス距離とフォーカス位置との対応関係を記述した対応テーブルを保持しており、この対応テーブルを参照することでズーム焦点距離とフォーカス位置とに基づいてフォーカス距離を算出することができる。
【0054】
(マニュアルフォーカス操作状態検出手段184)
マニュアルフォーカス操作状態検出手段184は、フォーカスリング115の回転状態を検出する。撮像装置10のフォーカスリング115には、フォーカスリング115の回転に応じて、その回転方向及び相対的な回転量を検出するための検出器が設けられている。そのため、マニュアルフォーカス操作状態検出手段184は、この検出器からの出力に基づいてフォーカスリング115の回転状態を検出することができる。例えば、マニュアルフォーカス操作状態検出手段184は、定期的に検出器の出力を保存しておき、前回保存した検出結果と、今回検出した検出結果とを比較して回転方向及び単位時間当たりの変化量(回転度合い)を検出する。
【0055】
(合焦位置・方向検出手段185、フォーカス駆動制御手段186)
合焦位置・方向検出手段185は、合焦位置を検出すると共に、合焦位置と現在のフォーカス位置との差分から合焦するためにフォーカスレンズ113を移動すべき方向(フォーカス位置を移動させるべき方向;以下、合焦方向)を算出する。このとき、フォーカス駆動制御手段186は、合焦方向の検出に利用する合焦状態評価値の差分を得るためにフォーカスレンズ113を駆動制御してWobbling動作を行わせる。また、合焦位置・方向検出手段185は、算出した合焦位置及び合焦方向に関する情報をLCD16に表示させる。
【0056】
以上、本実施形態に係る撮像装置10の構成について説明した。しかし、ここでは制御手段18の詳細な制御動作については説明していない。そこで、以下では、図6〜図13に示したフローチャート及び図2〜図5に示した説明図を参照しながら、主に制御手段18による制御動作について詳細に説明する。
【0057】
[撮像装置10による制御動作について]
まず、図6を参照しながら、全体的な処理の流れについて説明する。
【0058】
図6に示すように、まず、撮像装置10は、フォーカス位置検出手段182の機能によりフォーカス位置を取得して記憶手段に記録する(S101)。また、撮像装置10は、ズーム焦点距離算出手段181の機能によりズーム焦点距離を検出して記憶手段に記録する(S102)。なお、前回撮像時のズーム焦点距離と今回撮像時のズーム焦点距離とが記憶手段に記録された状態となる。次いで、撮像装置10は、マニュアルフォーカス操作状態検出手段184の機能により、記憶手段に記録された前回撮像時のズーム焦点距離と今回撮像時のズーム焦点距離とを比較し(S103)、ズーム焦点距離の変化からズーミング操作中であるか否かを判定する(S104)。
【0059】
ズーミング操作中である場合、撮像装置10は、処理をステップS105に進める。一方、ズーミング操作中でない場合、撮像装置10は、処理をステップS106に進める。
【0060】
処理をステップS105に進めた場合、撮像装置10は、ズームトラッキング制御を実施し(S105)、処理をステップS118に進める。なお、ズームトラッキング制御の処理については、後段において図7を参照しながら詳細に説明する。一方、処理をステップS106に進めた場合、撮像装置10は、マニュアルフォーカス操作状態検出手段184の機能により検出したマニュアルフォーカス操作状態を記憶手段に記録する(S106)。さらに、撮像装置10は、合焦状態評価値算出手段131により算出された合焦状態評価値を記憶手段に記録し(S107)、処理をステップS108に進める。
【0061】
処理をステップS108に進めた場合、撮像装置10は、データ量が所定の条件を満たすか否かを判定する(S108)。所定の条件を満たす場合、撮像装置10は、処理をステップS109に進める。一方、所定の条件を満たさない場合、撮像装置10は、処理をステップS117に進める。
【0062】
処理をステップS109に進めた場合、撮像装置10は、合焦位置・方向検出手段185の機能により合焦位置及び合焦方向を算出する(S109)。なお、合焦位置及び合焦方向の算出に係る処理については、後段において図8を参照しながら詳細に説明する。次いで、撮像装置10は、マニュアルフォーカス操作が行われたか否かを判定する(S110)。マニュアルフォーカス操作が行われた場合、撮像装置10は、処理をステップS113に進める。一方、マニュアルフォーカス操作が行われていない場合、撮像装置10は、処理をステップS111に進める。
【0063】
処理をステップS111に進めた場合、撮像装置10は、合焦位置及び合焦方向を表示する(S111)。次いで、撮像装置10は、フォーカス駆動制御手段186の機能により後述する第1の制御処理(Wobbling Focus駆動)を実施し(S112)、処理をステップS118に進める。一方、処理をステップS113に進めた場合、撮像装置10は、合焦位置及び操作方向の妥当性を表示する(S113)。次いで、撮像装置10は、操作変化量が所定の閾値より小さいか否かを判定する(S114)。操作変化量<閾値の場合、撮像装置10は、処理をステップS115に進める。一方、操作変化量≧閾値の場合、撮像装置10は、処理をステップS116に進める。
【0064】
処理をステップS115に進めた場合、撮像装置10は、第2の制御処理(Wobbling+MF Focus駆動)を実施し(S115)、処理をステップS118に進める。一方、処理をステップS116に進めた場合、撮像装置10は、第3の制御処理(MF Focus駆動)を実施し(S116)、処理をステップS118に進める。なお、ステップS108の処理においてデータ量が所定の条件を満たさず、処理をステップS117に進めた場合、撮像装置10は、マニュアルフォーカス操作が行われたか否かを判定する(S117)。マニュアルフォーカス操作が行われた場合、撮像装置10は、処置をステップS114に進める。一方、マニュアルフォーカス操作が行われていない場合、撮像装置10は、処理をステップS112に進める。
【0065】
上述したいずれかの流れに沿って処理をステップS118に進めた場合、撮像装置10は、レリーズ(シャッター解放)操作が行われたか否かを判定する(S118)。レリーズ操作が行われた場合、撮像装置10は、処理をステップS119に進める。一方、レリーズ操作が行われていない場合、撮像装置10は、処理をステップS101に戻す。
【0066】
処理をステップS119に進めた場合、撮像装置10は、Wobbling制御を実施したか否かを判定する(S119)。Wobbling制御を実施した場合、撮像装置10は、処理をステップS120に進める。一方、Wobbling制御を実施していない場合、撮像装置10は、処理をステップS121に進める。処理をステップS120に進めた場合、撮像装置10は、フォーカス駆動手段186の機能によりフォーカス位置を基準位置に戻し(S120)、処理をステップS121に進める。処理をステップS121に進めた撮像装置10は、レリーズ処理を実施する(S121)。
【0067】
以上、全体的な処理の流れについて説明した。
【0068】
(ズームトラッキング制御について)
次に、図7を参照しながら、図6のステップS105において実施するズームトラッキング制御に係る処理について説明する。なお、このズームトラッキング制御は、主に制御手段18の機能により実現される。
【0069】
フォーカス位置が同じ場合でも、光学系によっては、ズーミング操作によって現在の合焦距離(フォーカス距離)が変化してしまうことが多い。そのため、フォーカス距離がズーミング操作によって変化しないように、ズーム焦点距離に応じてフォーカス位置を変化させる制御処理(ズームトラッキング制御)が必要になる。そこで、撮像装置10は、ズーミング操作中であると判断した場合にズームトラッキング制御を実施する。
【0070】
図7に示すように、ズームトラッキング制御を開始した撮像装置10は、まず、前回のズーム焦点距離の情報を記憶手段から取得する(S131)。次いで、撮像装置10は、現在のフォーカス位置を取得すると共に、フォーカス距離を算出する(S132)。このフォーカス距離は、前回撮影時におけるズーム焦点距離と今回撮影時におけるフォーカス位置から算出される。次いで、撮像装置10は、今回撮影時におけるズーム焦点距離の情報を取得する(S133)。次いで、撮像装置10は、今回撮影時に検出したズーム焦点距離と前回撮影時のフォーカス距離とに基づいて今回撮影時の目標とするフォーカス位置を算出する(S134)。次いで、撮像装置10は、今回撮影時のフォーカス位置と目標とするフォーカス位置との差分をフォーカス駆動量としてフォーカス駆動制御を実施する(S135)。
【0071】
以上、ズームトラッキング制御について説明した。
【0072】
(合焦位置及び合焦方向の算出方法について)
次に、図8を参照しながら、図6のステップS109において実施する合焦位置及び合焦方向の算出処理について説明する。なお、この算出処理は、主に制御手段18の機能により実現される。
【0073】
図8に示すように、合焦位置及び合焦方向の検出処理を開始した撮像装置10は、最新のフォーカス位置群を取得して記憶手段に記録する(S141)。また、撮像装置10は、最新の合焦状態評価値群を取得して記憶手段に記録する(S142)。なお、合焦状態評価値は、画像データを読み出しながら各ブロック(図2に示した中央領域の各分割領域)のコントラスト値に相当する評価値を算出した結果である。また、最新のフォーカス位置群及び最新の合焦状態評価値群としては、例えば、前々回撮影時の画像、前回撮影時の画像、今回撮影時の画像に対応する合焦位置及び合焦状態評価値が用いられる。
【0074】
次いで、撮像装置10は、パラメータnを1にリセットする(S143)。次いで、撮像装置10は、パラメータnがn≦評価ブロック数であるか否かを判定する(S144)。n≦評価ブロック数である場合、撮像装置10は、処理をステップS145に進める。一方、n≦評価ブロック数でない場合、撮像装置10は、合焦位置及び合焦方向の算出に係る一連の処理を終了する。なお、ステップS144〜S150の処理は、パラメータnをインクリメントさせながらブロックの位置を変えつつ、各ブロックについて実行される。
【0075】
処理をステップS145に進めた場合、撮像装置10は、合焦位置の算出が不可である状態、∞方向側に合焦位置がある状態、近距離方向側に合焦位置がある状態の判定を実施する(S145)。まず、撮像装置10は、合焦位置の算出が可能であるか否かを判定する(S146)。合焦位置の算出が可能である場合(図3のE1)、撮像装置10は、処理をステップS147に進める。一方、合焦位置の算出が不可である場合(図3のE2〜E4)、撮像装置10は、処理をステップS151に進める。
【0076】
処理をステップS147に進めた場合、撮像装置10は、合焦位置を算出する(S147)。次いで、撮像装置10は、合焦方向及びずれ量を算出する(S148)。これら合焦位置及び合焦方向は、記憶手段に記録されたフォーカス位置群及び合焦状態評価値群を用いて算出される。例えば、図4に示すように、3つの合焦評価値の最大値に対応する点と3番目の値に対応する点とを結ぶ直線と、その直線の傾きを鏡像反転させて2番目の値に対応する点を通る直線と、の交点から合焦位置が算出される。
【0077】
一方、合焦方向を算出するためには、少なくとも3つのフォーカス位置における合焦状態評価値が必要である。なぜなら、合焦状態評価値は先鋭度を表しているので相対的に合焦に近づくほど高い値となるが、コントラストが小さい被写体を撮像する場合には合焦位置でも合焦状態評価値が大きくならないため、合焦状態が検出できないことによる。また、ぼけが大きい場合にも合焦状態評価値がほとんど変わらないため、合焦状態の検出ができない。
【0078】
さて、ステップS147、S148の処理を完了すると、撮像装置10は、処理をステップS149に進める。処理をステップS149に進めた場合、撮像装置10は、合焦位置及び合焦方向の検出結果を記憶手段に記録する(S149)。次いで、撮像装置10は、パラメータnを1だけインクリメントさせ(S150)、評価対象となるブロックを更新し、処理をステップS144に戻す。
【0079】
また、ステップS146において処理をステップS151に進めた場合、撮像装置10は、∞方向側に合焦位置がある状態か否かを判定する(S151)。∞方向側に合焦位置がある状態の場合(図3のE3)、撮像装置10は、処理をステップS152に進める。一方、∞方向側に合焦位置がない状態の場合(図3のE2及びE4)、撮像装置10は、処理をステップS153に進める。
【0080】
処理をステップS152に進めた場合、撮像装置10は、合焦位置を∞方向側に確定させ(S152)、処理をステップS149に進める。一方、処理をステップS153に進めた場合、撮像装置10は、近距離方向側に合焦位置がある状態か否かを判定する(S153)。近距離方向側に合焦位置がある状態の場合(図3のE2)、撮像装置10は、処理をステップS154に進める。一方、近距離方向側に合焦位置がない状態の場合(図3のE4)、撮像装置10は、処理をステップS155に進める。
【0081】
処理をステップS154に進めた場合、撮像装置10は、合焦位置を近距離方向側に確定させ(S154)、処理をステップS149に進める。一方、処理をステップS155に進めた場合、撮像装置10は、合焦位置が不定であることを確定させ、処理をステップS149に進める。このように、少なくとも3つのフォーカス位置における合焦状態評価値から合焦位置について4パターンのいずれかの属性を確定させることができる。なお、これら少なくとも3つのフォーカス位置は、合焦方向の検出を容易にするために、許容ピント範囲(被写界深度)以上離れた位置に設定される。
【0082】
以上、合焦位置及び合焦方向の算出方法について説明した。
【0083】
(フォーカス制御について)
次に、図9〜図11を参照しながら、図6のステップS112及びS115において実施するフォーカス制御について説明する。なお、本実施形態に係るフォーカス制御において特徴的な部分はWobbling動作にある。そこで、Wobbling動作が関係する制御処理を中心にして詳細に説明する。また、このフォーカス制御は、主に制御手段18の機能により実現される。
【0084】
(Wobbling制御量の算出方法)
まず、図9を参照しながら、Wobbling制御量の算出方法について説明する。Wobbling動作は、現在の基準フォーカス位置に対して所定量だけ∞方向側にずれた位置と、近距離方向側に所定量(制御量)だけずれた位置とを順次往復させる動作である。ここでは、この制御量を算出する方法について説明する。
【0085】
図9に示すように、Wobbling制御量の算出を開始した撮像装置10は、被写界深度(Fδ)を算出する(S161)。被写界深度Fδは、イメージャ上のずれ量からF(絞り)×δ(許容錯乱円)により算出することができる。例えば、δ=15μmなどとなる。また、撮像装置10は、イメージャ上のずれ量に対するフォーカスずれ量の変換係数をズーム焦点距離に依存して予め保持しているものとする。次いで、撮像装置10は、パラメータnを1にリセットする(S162)。次いで、撮像装置10は、パラメータnがn≦評価ブロック数であるか否かを判定する(S163)。n≦評価ブロック数である場合、撮像装置10は、処理をステップS164に進める。一方、n≦評価ブロック数でない場合、撮像装置10は、処理をステップS173に進める。
【0086】
処理をステップS164に進めた場合、撮像装置10は、合焦位置及び合焦方向の検出結果を記憶手段から読み出す(S164)。次いで、撮像装置10は、合焦位置が不定であるか否かを判定する(S165)。合焦位置が不定である場合、撮像装置10は、処理をステップS172に進める。一方、合焦位置が不定ではない場合、撮像装置10は、処理をステップS166に進める。処理をステップS166に進めた場合、撮像装置10は、合焦偏差量のデータがあるか否かを判定する(S166)。合焦偏差量のデータがある場合、撮像装置10は、処理をステップS167に進める。一方、合焦偏差量のデータがない場合、撮像装置10は、処理をステップS172に進める。
【0087】
処理をステップS167に進めた場合、撮像装置10は、制御量を合焦点偏差(Fδ)×2に設定する(S167)。次いで、撮像装置10は、制御量が制御量>8Fδであるか否かを判定する(S168)。制御量>8Fδである場合、撮像装置10は、処理をステップS172に進める。一方、制御量>8Fδでない場合、撮像装置10は、処理をステップS169に進める。処理をステップS169に進めた場合、撮像装置10は、制御量が制御量<4Fδであるか否かを判定する(S169)。制御量<4Fδである場合、撮像装置10は、処理をステップS171に進める。一方、制御量<4Fδでない場合、撮像装置10は、処理をステップS170に進める。
【0088】
処理をステップS170に進めた場合、撮像装置10は、パラメータnを1だけインクリメントし(S170)、評価対象のブロックを更新し、処理をステップS163に戻す。また、ステップS169において処理をステップS171に進めた場合、撮像装置10は、制御量を4Fδに設定し(S171)、処理をステップS170に進める。また、ステップS165、S166、又はS168において処理をステップS172に進めた場合、撮像装置10は、制御量を8Fδに設定し(S172)、処理をステップS170に進める。また、ステップS163において処理をステップS173に進めた場合、撮像装置10は、最終制御量を各ブロックについて算出した制御量の最大値に設定し(S173)、Wobbling制御量の算出処理を終了する。
【0089】
以上、Wobbling制御量の算出方法について説明した。
【0090】
(Wobbling Focus駆動:第1の制御処理)
次に、図10を参照しながら、図6のステップS112において実施する第1の制御処理(Wobbling Focus駆動)について説明する。
【0091】
図10に示すように、Wobbling Focus駆動を開始した撮像装置10は、図9に示した方法でWobbling制御量(XFδ)を算出する(S181)。次いで、撮像装置10は、状態パラメータStateがState=0であるか否かを判定する(S182)。State=0である場合、撮像装置10は、処理をステップS183に進める。一方、State=0でない場合、撮像装置10は、処理をステップS185に進める。処理をステップS183に進めた場合、撮像装置10は、駆動方向を∞方向側に設定し、駆動量をXFδに設定する(S183)。次いで、撮像装置10は、状態パラメータStateをState=1に設定し(S184)、処理をステップS190に進める。
【0092】
また、ステップS182において処理をステップS185に進めた場合、撮像装置10は、State=1であるか否かを判定する(S185)。State=1である場合、撮像装置10は、処理をステップS186に進める。一方、State=1でない場合、撮像装置10は、処理をステップS188に進める。処理をステップS186に進めた場合、撮像装置10は、駆動方向を近距離方向側に設定し、駆動量を2XFδに設定する(S186)。次いで、撮像装置10は、状態パラメータStateをState=2に設定し(S187)、処理をステップS190に進める。
【0093】
また、ステップS185において処理をステップS188に進めた場合、撮像装置10は、駆動方向を∞方向側に設定し、駆動量をXFδに設定する(S188)。次いで、撮像装置10は、状態パラメータStateをState=0に設定し(S189)、処理をステップS190に進める。処理をステップS190に進めた撮像装置10は、設定した駆動方向及び駆動量でフォーカスレンズ113を駆動制御する(S190)。
【0094】
例えば、現在の基準フォーカス位置を180、絞り値を4、ズーム焦点距離に対応する変換係数を1/12とすると、8Fδ×(1/12)=40となり、3つのフォーカス位置は140、180、220となる。この場合、フォーカス位置は、基準フォーカス位置の180から∞方向側に8Fδだけ移動した140、近距離方向側に8Fδだけ移動した220の順で制御される。つまり、基準フォーカス位置から−40パルス分駆動し、次に+80パルス分駆動し、最後に−40パルス分駆動して元の位置に戻す制御が行われる。
【0095】
以上、第1の制御処理について説明した。
【0096】
(Wobbling+MF Focus駆動:第2の制御処理)
次に、図11を参照しながら、図6のステップS115において実施する第2の制御処理(Wobbling+MF Focus駆動)について説明する。
【0097】
マニュアルフォーカス操作があり、その操作量に応じた駆動量がWobblingによる制御幅(この例では40パルス)より少ない場合は、合焦状態検出に必要なフォーカス偏差量が得られないため、操作方向及び操作量に応じた駆動量をWobbling制御の駆動量に加算して駆動制御する方法が好ましい。第2の制御処理は、このような方法に関するものである。
【0098】
図11に示すように、Wobbling+MF Focus駆動を開始した撮像装置10は、Wobbling制御量(XFδ)を算出する(S201)。次いで、撮像装置10は、マニュアルフォーカス駆動量(A)を算出する(S202)。次いで、撮像装置10は、マニュアルフォーカス操作の方向が∞方向側であるか否かを判定する(S203)。マニュアルフォーカス操作の方向が∞方向側である場合、撮像装置10は、処理をステップS204に進める。一方、マニュアルフォーカス操作の方向が∞方向側でない場合、撮像装置10は、処理をステップS213に進める。
【0099】
処理をステップS204に進めた場合、撮像装置10は、状態パラメータStateがState=0であるか否かを判定する(S204)。State=0である場合、撮像装置10は、処理をステップS205に進める。一方、State=0でない場合、撮像装置10は、処理をステップS208に進める。処理をステップS205に進めた場合、撮像装置10は、駆動方向を∞方向側に設定し、駆動量をXFδ+Aに設定する(S205)。次いで、撮像装置10は、状態パラメータStateをState=1に設定し(S206)、処理をステップS207に進める。
【0100】
ステップS204において処理をステップS208に進めた場合、撮像装置10は、状態パラメータStateがState=1であるか否かを判定する(S208)。State=1である場合、撮像装置10は、処理をステップS209に進める。一方、State=1でない場合、撮像装置10は、処理をステップS211に進める。処理をステップS209に進めた場合、撮像装置10は、駆動方向を近距離方向側に設定し、駆動量を2XFδに設定する(S209)。次いで、撮像装置10は、状態パラメータStateをState=2に設定し(S210)、処理をステップS207に進める。
【0101】
ステップS208において処理をステップS211に進めた場合、撮像装置10は、駆動方向を∞方向側に設定し、駆動量をXFδに設定する(S211)。次いで、撮像装置10は、状態パラメータStateをState=0に設定し(S212)、処理をステップS207に進める。
【0102】
また、ステップS203において処理をステップS213に進めた場合、撮像装置10は、状態パラメータStateがState=0であるか否かを判定する(S213)。State=0である場合、撮像装置10は、処理をステップS214に進める。一方、State=0でない場合、撮像装置10は、処理をステップS216に進める。処理をステップS214に進めた場合、撮像装置10は、駆動方向を∞方向側に設定し、駆動量をXFδ−Aに設定する(S214)。次いで、撮像装置10は、状態パラメータStateをState=1に設定し(S215)、処理をステップS207に進める。
【0103】
また、ステップS213において処理をステップS216に進めた場合、撮像装置10は、状態パラメータStateがState=1であるか否かを判定する(S216)。State=1である場合、撮像装置10は、処理をステップS217に進める。一方、State=1でない場合、撮像装置10は、処理をステップS219に進める。処理をステップS217に進めた場合、撮像装置10は、駆動方向を近距離方向側に設定し、駆動量を2XFδに設定する(S217)。次いで、撮像装置10は、状態パラメータStateをState=2に設定し(S218)、処理をステップS207に進める。
【0104】
また、ステップS216において処理をステップS219に進めた場合、撮像装置10は、駆動方向を∞方向側に設定し、駆動量をXFδに設定する(S219)。次いで、撮像装置10は、状態パラメータStateをState=0に設定し(S220)、処理をステップS207に進める。上述したいずれかの流れに沿って処理をステップS207に進めた場合、撮像装置10は、設定した駆動方向及び駆動量でフォーカス位置を駆動制御する(S207)。
【0105】
以上、第2の制御処理について説明した。
【0106】
(MF Focus駆動:第3の制御処理)
上述した第2の制御処理は、マニュアルフォーカス操作による駆動量がWobblingによる制御幅よりも小さい場合であった。一方、マニュアルフォーカス操作による駆動量がWobblingによる制御幅(例えば、40パルス)より大きい場合には、撮影者の所望する合焦位置が現在のフォーカス位置近傍にない可能性が大きい。また、この場合には、Wobbling動作を行わなくても、マニュアルフォーカス操作による駆動によって合焦検出に十分な3つの異なるフォーカス位置が得られる。そのため、この場合にはWobbling制御を禁止した制御にする。このように、操作状態に応じてフォーカス制御を切り替えることで無駄な制御をなくして好適なフォーカス制御が実現される。
【0107】
以上、第3の制御処理について説明した。
【0108】
(パラメータの設定など)
上記の説明において、Wobbling制御量を40パルス(8Fδ)とする例を挙げたが、この40パルスという値は、合焦フォーカス位置から十分に離れた位置からでも合焦フォーカス位置を算出できるようにし、現在のフォーカス位置における合焦度合いを算出できるように設定された設定値である。
【0109】
また、上述したフォーカス制御によると、1ブロックの検出領域について一旦合焦フォーカス位置が検出され、マニュアルフォーカス操作によって更に合焦フォーカス位置に近づいた場合に、8Fδよりも少ないWobbling制御量で合焦フォーカス位置を算出することが可能になる。また、図9に示したように、現在のフォーカス偏差が4Fδ以下の場合、フォーカス偏差の2倍の量をWobbling制御量とするため、合焦フォーカス位置を算出するのに必要最小限の量でWobbling動作を実施することが可能になる。但し、制御量が小さすぎるとピーク検出が困難となるため、4Fδを最小制限量としている。また、複数ブロックを検出領域とする場合には、各ブロックについて算出されたWobbling制御量の中で最大の制御値を採用することで好適なWobbling動作が実現される。
【0110】
以上、本実施形態に係るフォーカス制御について説明した。
【0111】
(合焦状態の表示について)
次に、図12を参照しながら、図6のステップS111において実施される合焦状態の表示処理について説明する。
【0112】
図12に示すように、合焦位置及び合焦方向の表示処理を開始した撮像装置10は、被写界深度(Fδ)を算出する(S231)。次いで、撮像装置10は、パラメータnをん=1に設定する(S232)。次いで、撮像装置10は、n≦評価ブロック数であるか否かを判定する(S233)。n≦評価ブロック数である場合、撮像装置10は、処理をステップS234に進める。一方、n≦評価ブロック数でない場合、撮像装置10は、合焦位置及び合焦方向の表示処理を終了する。
【0113】
処理をステップS234に進めた場合、撮像装置10は、合焦位置及び合焦方向の検出結果を記憶手段から読み出す(S234)。次いで、撮像装置10は、合焦位置が不定であるか否かを判定する(S235)。合焦位置が不定である場合、撮像装置10は、処理をステップS245に進める。一方、合焦位置が不定でない場合、撮像装置10は、処理をステップS236に進める。
【0114】
処理をステップS236に進めた場合、撮像装置10は、合焦ずれ量のデータがあるか否かを判定する(S236)。合焦ずれ量のデータがある場合、撮像装置10は、処理をステップS237に進める。一方、合焦ずれ量のデータがない場合、撮像装置10は、処理をステップS242に進める。
【0115】
処理をステップS237に進めた場合、撮像装置10は、合焦度合いが被写界深度内であるか否かを判定する(S237)。合焦度合いが被写界深度内である場合、撮像装置10は、処理をステップS238に進める。一方、合焦度合いが被写界深度内でない場合、撮像装置10は、処理をステップS239に進める。
【0116】
処理をステップS238に進めた場合、撮像装置10は、合焦OKである旨をLCD16に表示する(S238)。例えば、図5の領域A1について合焦度合いが被写界深度内(許容合焦点範囲内:1Fδ以内)である場合、撮像装置10は、領域A1の表示を黄色の点滅表示にする。
【0117】
また、ステップS237において処理をステップS239に進めた場合、撮像装置10は、合焦方向が∞方向側であるか否かを判定する(S239)。合焦方向が∞方向側である場合、撮像装置10は、処理をステップS240に進める。一方、合焦方向が∞方向側でない場合、撮像装置10は、処理をステップS241に進める。
【0118】
処理をステップS240に進めた場合、撮像装置10は、近傍前ピン状態である旨をLCD16に表示する(S240)。例えば、図5の領域A2について近傍前ピン状態である場合、撮像装置10は、領域A2の表示を薄いシアン色の点滅表示にする。一方、処理をステップS241に進めた場合、撮像装置10は、近傍後ピン状態である旨をLCD16に表示する(S241)。例えば、図5の領域A3について近傍後ピン状態である場合、撮像装置10は、領域A3の表示を薄い青色の点滅表示にする。
【0119】
また、ステップS236において処理をステップS242に進めた場合、撮像装置10は、合焦方向が∞方向側であるか否かを判定する(S242)。合焦方向が∞方向側である場合、撮像装置10は、処理をステップS243に進める。一方、合焦方向が∞方向側でない場合、撮像装置10は、処理をステップS244に進める。
【0120】
処理をステップS243に進めた場合、撮像装置10は、前ピン状態である旨をLCD16に表示する(S243)。例えば、図5の領域A2について前ピン状態である場合、撮像装置10は、領域A2の表示を濃いシアン色の点滅表示にする。一方、処理をステップS244に進めた場合、撮像装置10は、後ピン状態である旨をLCD16に表示する(S244)。例えば、図5の領域A3について後ピン状態である場合、撮像装置10は、領域A3の表示を濃い青色の点滅表示にする。
【0121】
また、ステップS235において処理をステップS245に進めた場合、撮像装置10は、LCD16に合焦状態を示す表示をせず(S245)、処理をステップS246に進める。また、ステップS240、S241、S243、S244のいずれかの処理が完了した後も、撮像装置10は、処理をステップS246に進める。処理をステップS246に進めた撮像装置10は、パラメータnを1だけインクリメントし(S246)、評価領域を更新し、処理をステップS233に戻す。
【0122】
以上、合焦状態の表示方法について説明した。このように、表示形態を合焦状態に応じて変えることで、各ブロックに対して許容合焦範囲内かどうかや、合焦するためのマニュアルフォーカス操作方向を撮影者に告知することができる。なお、表示色や点滅の有無など、表現方法は上記の例に限定されない。また、ここでは表示による合焦状態の通知方法について説明したが、音声や振動などを利用して合焦状態を通知するように構成することも可能である。さらに、フォーカスリング111に合焦方向に応じた微少な回転を加えて合焦状態を通知するように構成されていてもよい。
【0123】
(合焦位置及び操作方向の妥当性表示について)
次に、図13を参照しながら、図6のステップS113において実施する合焦位置及び操作方向の妥当性を表示する処理について説明する。
【0124】
図13に示すように、合焦位置及び操作方向の妥当性の表示処理を開始した撮像装置10は、被写界深度(Fδ)を算出する(S251)。次いで、撮像装置10は、パラメータnを1にリセットする(S252)。次いで、撮像装置10は、n≦評価ブロック数であるか否かを判定する(S253)。n≦評価ブロック数である場合、撮像装置10は、処理をステップS254に進める。一方、n≦評価ブロック数でない場合、撮像装置10は、合焦位置及び操作方向の妥当性を表示する処理を終了する。
【0125】
処理をステップS254に進めた場合、撮像装置10は、合焦位置及び合焦方向の検出結果を記憶手段から読み出す(S254)。次いで、撮像装置10は、マニュアルフォーカス操作の方向を記憶手段から読み出す(S255)。次いで、撮像装置10は、合焦位置が不定であるか否かを判定する(S256)。合焦位置が不定である場合、撮像装置10は、処理をステップS266に進める。合焦位置が不定でない場合、撮像装置10は、処理をステップS257に進める。
【0126】
処理をステップS257に進めた場合、撮像装置10は、合焦ずれ量のデータがあるか否かを判定する(S257)。合焦ずれ量のデータがある場合、撮像装置10は、処理をステップS258に進める。一方、合焦ずれ量のデータがない場合、撮像装置10は、処理をステップS263に進める。
【0127】
処理をステップS258に進めた場合、撮像装置10は、合焦度合いが被写界深度内であるか否かを判定する(S258)。合焦度合いが被写界深度内である場合、撮像装置10は、処理をステップS259に進める。一方、合焦度合いが被写界深度内でない場合、撮像装置10は、処理をステップS260に進める。
【0128】
処理をステップS259に進めた場合、撮像装置10は、合焦OKである旨をLCD16に表示する(S259)。例えば、図5の領域A1について合焦度合いが被写界深度内(許容合焦点範囲内:1Fδ以内)である場合、撮像装置10は、領域A1の表示を黄色の点滅表示にする。
【0129】
処理をステップS260に進めた場合、撮像装置10は、合焦方向と操作方向とが一致しているか否かを判定する(S260)。合焦方向と操作方向とが一致している場合、撮像装置10は、処理をステップS261に進める。一方、合焦方向と操作方向とが一致していない場合、撮像装置10は、処理をステップS262に進める。
【0130】
処理をステップS261に進めた場合、撮像装置10は、近傍操作方向OKである旨をLCD16に表示する(S261)。例えば、図5の領域A2について近傍操作方向OKである場合、撮像装置10は、領域A2の表示を薄い緑色の点滅表示にする。一方、処理をステップS262に進めた場合、撮像装置10は、近傍操作方向NGである旨をLCD16に表示する(S262)。例えば、図5の領域A3について近傍操作方向NGである場合、撮像装置10は、領域A3の表示を薄い赤色の点滅表示にする。
【0131】
また、ステップS257において処理をステップS263に進めた場合、撮像装置10は、合焦方向と操作方向とが一致しているか否かを判定する(S263)。合焦方向と操作方向とが一致している場合、撮像装置10は、処理をステップS264に進める。一方、合焦方向と操作方向とが一致していない場合、撮像装置10は、処理をステップS265に進める。
【0132】
処理をステップS264に進めた場合、撮像装置10は、操作方向OKである旨をLCD16に表示する(S264)。例えば、図5の領域A2について操作方向OKである場合、撮像装置10は、領域A2の表示を濃い緑色の点滅表示にする。一方、処理をステップS265に進めた場合、撮像装置10は、操作方向NGである旨をLCD16に表示する(S265)。例えば、図5の領域A3について操作方向NGである場合、撮像装置10は、領域A3の表示を濃い赤色の点滅表示にする。
【0133】
また、ステップS256において処理をステップS266に進めた場合、撮像装置10は、LCD16に合焦状態及び操作方向の妥当性を示す表示をせず(S266)、処理をステップS267に進める。また、ステップS261、S262、S264、S265のいずれかの処理が完了した後も、撮像装置10は、処理をステップS267に進める。処理をステップS267に進めた撮像装置10は、パラメータnを1だけインクリメントし(S267)、評価領域を更新し、処理をステップS253に戻す。
【0134】
以上、合焦状態及び操作方向の妥当性に関する表示方法について説明した。このように、表示形態を合焦状態及び操作方向の妥当性に応じて変えることで、マニュアルフォーカス操作方向が合焦に向かっているかを撮影者に告知することができる。なお、表示色や点滅の有無など、表現方法は上記の例に限定されない。また、ここでは表示による合焦状態の通知方法について説明したが、音声や振動などを利用して合焦状態を通知するように構成することも可能である。さらに、フォーカスリング111に合焦方向に応じた微少な回転を加えて合焦状態を通知するように構成されていてもよい。
【0135】
(その他)
上記説明においては、30×18に分割した小さなブロック群の各ブロックについて独立して表示を行う例を示したが、撮影者が指定した任意の1つのブロックを評価対象ブロックにしてもよい。また、上記説明において表示形態を6パターン例示したが、合焦度合いを更に細かく分類し、その分類数に応じて表示を細かくしてもよい。また、上記説明において3つのフォーカス位置を利用したが、4つ以上のフォーカス位置を利用してもよい。このような変形についても、当然に本実施形態の技術的範囲に属する。
【0136】
以上、添付図面を参照しながら本発明の好適な実施形態について説明したが、本発明は係る例に限定されないことは言うまでもない。当業者であれば、特許請求の範囲に記載された範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、それらについても当然に本発明の技術的範囲に属するものと了解される。
【符号の説明】
【0137】
10 撮像装置
11 撮像光学系
111 ズームリング
112 絞り
113 フォーカスレンズ
114 ズームレンズ
115 フォーカスリング
12 撮像素子
13 画像信号処理回路
131 合焦状態評価値算出手段
132 表示画像合成手段
14 VRAM
15 LCDドライバ
16 LCD
17 メモリ
18 制御手段(CPU)
181 ズーム焦点距離算出手段
182 フォーカス一検出手段
183 フォーカス距離算出手段
184 マニュアルフォーカス操作状態検出手段
185 合焦位置・方向算出手段
186 フォーカス駆動制御手段
19 操作部材
20 タイミングジェネレータ
21 フォーカス駆動手段
22 絞り駆動手段
【特許請求の範囲】
【請求項1】
複数の異なるフォーカス位置における撮像画像から合焦状態を検出し、合焦フォーカス位置と合焦近傍度合いとを算出する合焦評価手段と、
撮影者のマニュアルフォーカス操作の状態を検出する状態検出手段と、
を有し、
前記合焦評価手段が算出した合焦近傍度合いと前記状態検出手段が検出したマニュアルフォーカス操作の状態とに応じて前記合焦状態を検出するためのフォーカス制御を異ならせる
ことを特徴とする、撮像装置。
【請求項2】
前記フォーカス制御を実施するフォーカス制御手段をさらに備え、
前記フォーカス制御手段は、フォーカスリングの回転移動量が所定の閾値を下回る場合に定期的に前記フォーカスレンズをウォブリング動作させ、前記フォーカスリングの回転移動量が所定の閾値を上回る場合には前記フォーカスレンズをウォブリング動作させない
ことを特徴とする、請求項1に記載の撮像装置。
【請求項3】
前記フォーカス制御手段は、少なくとも絞り値及び前記合焦近傍度合いに応じて決定される移動量にて前記フォーカスレンズをウォブリング動作させる
ことを特徴とする、請求項1又は2に記載の撮像装置。
【請求項4】
前記フォーカス制御手段は、ズーミング操作が行われている場合に前記フォーカスレンズをウォブリング動作させない
ことを特徴とする、請求項1〜3のいずれか1項に記載の撮像装置。
【請求項5】
前記合焦近傍度合いを示す情報を画面に表示する情報表示手段をさらに備える
ことを特徴とする、請求項1〜4のいずれか1項に記載の撮像装置。
【請求項6】
前記情報表示手段は、ズーミング操作が行われている場合に前記合焦近傍度合いに関する情報を画面に表示しない
ことを特徴とする、請求項5に記載の撮像装置。
【請求項7】
前記合焦評価手段は、分割された複数の撮像領域毎に合焦近傍度合いを検出し、
前記情報表示手段は、前記撮像領域毎に検出された合焦近傍度合いを示す情報を前記各撮像領域に対応する画面領域に表示する
請求項5又は6に記載の撮像装置。
【請求項8】
前記情報表示手段は、合焦している撮像領域に対応する画面領域の表示を強調する
ことを特徴とする、請求項7に記載の撮像装置。
【請求項9】
複数の異なるフォーカス位置における撮像画像から合焦状態を検出し、合焦フォーカス位置と合焦近傍度合いとを算出する合焦評価工程と、
撮影者のマニュアルフォーカス操作の状態を検出する状態検出工程と、
を含み、
前記合焦評価工程で算出した合焦近傍度合いと前記状態検出工程で検出したマニュアルフォーカス操作の状態とに応じて前記合焦状態を検出するためのフォーカス制御を異ならせる
ことを特徴とする、撮像装置における制御方法。
【請求項10】
前記フォーカス制御を実施するフォーカス制御工程をさらに含み、
前記フォーカス制御工程では、フォーカスリングの回転移動量が所定の閾値を下回る場合に定期的に前記フォーカスレンズをウォブリング動作させ、前記フォーカスリングの回転移動量が所定の閾値を上回る場合には前記フォーカスレンズをウォブリング動作させない
ことを特徴とする、請求項9に記載の撮像装置における制御方法。
【請求項11】
前記フォーカス制御工程では、少なくとも絞り値及び前記合焦度合いに応じて決定される移動量にて前記フォーカスレンズをウォブリング動作させる
ことを特徴とする、請求項9又は10に記載の撮像装置における制御方法。
【請求項12】
前記フォーカス制御工程では、ズーミング操作が行われている場合に前記フォーカスレンズをウォブリング動作させない
ことを特徴とする、請求項9〜11のいずれか1項に記載の撮像装置における制御方法。
【請求項13】
前記合焦近傍度合いを示す情報を画面に表示する情報表示工程をさらに含む
ことを特徴とする、請求項9〜12のいずれか1項に記載の撮像装置における制御方法。
【請求項14】
前記情報表示工程では、ズーミング操作が行われている場合に前記合焦近傍度合いに関する情報を画面に表示しない
ことを特徴とする、請求項13に記載の撮像装置における制御方法。
【請求項15】
前記合焦評価工程では、分割された複数の撮像領域毎に合焦近傍度合いを検出し、
前記情報表示工程では、前記撮像領域毎に検出された合焦近傍度合いを示す情報を前記各撮像領域に対応する画面領域に表示する
請求項13又は14に記載の撮像装置における制御方法。
【請求項16】
前記情報表示工程では、合焦している撮像領域に対応する画面領域の表示を強調する
ことを特徴とする、請求項15に記載の撮像装置における制御方法。
【請求項1】
複数の異なるフォーカス位置における撮像画像から合焦状態を検出し、合焦フォーカス位置と合焦近傍度合いとを算出する合焦評価手段と、
撮影者のマニュアルフォーカス操作の状態を検出する状態検出手段と、
を有し、
前記合焦評価手段が算出した合焦近傍度合いと前記状態検出手段が検出したマニュアルフォーカス操作の状態とに応じて前記合焦状態を検出するためのフォーカス制御を異ならせる
ことを特徴とする、撮像装置。
【請求項2】
前記フォーカス制御を実施するフォーカス制御手段をさらに備え、
前記フォーカス制御手段は、フォーカスリングの回転移動量が所定の閾値を下回る場合に定期的に前記フォーカスレンズをウォブリング動作させ、前記フォーカスリングの回転移動量が所定の閾値を上回る場合には前記フォーカスレンズをウォブリング動作させない
ことを特徴とする、請求項1に記載の撮像装置。
【請求項3】
前記フォーカス制御手段は、少なくとも絞り値及び前記合焦近傍度合いに応じて決定される移動量にて前記フォーカスレンズをウォブリング動作させる
ことを特徴とする、請求項1又は2に記載の撮像装置。
【請求項4】
前記フォーカス制御手段は、ズーミング操作が行われている場合に前記フォーカスレンズをウォブリング動作させない
ことを特徴とする、請求項1〜3のいずれか1項に記載の撮像装置。
【請求項5】
前記合焦近傍度合いを示す情報を画面に表示する情報表示手段をさらに備える
ことを特徴とする、請求項1〜4のいずれか1項に記載の撮像装置。
【請求項6】
前記情報表示手段は、ズーミング操作が行われている場合に前記合焦近傍度合いに関する情報を画面に表示しない
ことを特徴とする、請求項5に記載の撮像装置。
【請求項7】
前記合焦評価手段は、分割された複数の撮像領域毎に合焦近傍度合いを検出し、
前記情報表示手段は、前記撮像領域毎に検出された合焦近傍度合いを示す情報を前記各撮像領域に対応する画面領域に表示する
請求項5又は6に記載の撮像装置。
【請求項8】
前記情報表示手段は、合焦している撮像領域に対応する画面領域の表示を強調する
ことを特徴とする、請求項7に記載の撮像装置。
【請求項9】
複数の異なるフォーカス位置における撮像画像から合焦状態を検出し、合焦フォーカス位置と合焦近傍度合いとを算出する合焦評価工程と、
撮影者のマニュアルフォーカス操作の状態を検出する状態検出工程と、
を含み、
前記合焦評価工程で算出した合焦近傍度合いと前記状態検出工程で検出したマニュアルフォーカス操作の状態とに応じて前記合焦状態を検出するためのフォーカス制御を異ならせる
ことを特徴とする、撮像装置における制御方法。
【請求項10】
前記フォーカス制御を実施するフォーカス制御工程をさらに含み、
前記フォーカス制御工程では、フォーカスリングの回転移動量が所定の閾値を下回る場合に定期的に前記フォーカスレンズをウォブリング動作させ、前記フォーカスリングの回転移動量が所定の閾値を上回る場合には前記フォーカスレンズをウォブリング動作させない
ことを特徴とする、請求項9に記載の撮像装置における制御方法。
【請求項11】
前記フォーカス制御工程では、少なくとも絞り値及び前記合焦度合いに応じて決定される移動量にて前記フォーカスレンズをウォブリング動作させる
ことを特徴とする、請求項9又は10に記載の撮像装置における制御方法。
【請求項12】
前記フォーカス制御工程では、ズーミング操作が行われている場合に前記フォーカスレンズをウォブリング動作させない
ことを特徴とする、請求項9〜11のいずれか1項に記載の撮像装置における制御方法。
【請求項13】
前記合焦近傍度合いを示す情報を画面に表示する情報表示工程をさらに含む
ことを特徴とする、請求項9〜12のいずれか1項に記載の撮像装置における制御方法。
【請求項14】
前記情報表示工程では、ズーミング操作が行われている場合に前記合焦近傍度合いに関する情報を画面に表示しない
ことを特徴とする、請求項13に記載の撮像装置における制御方法。
【請求項15】
前記合焦評価工程では、分割された複数の撮像領域毎に合焦近傍度合いを検出し、
前記情報表示工程では、前記撮像領域毎に検出された合焦近傍度合いを示す情報を前記各撮像領域に対応する画面領域に表示する
請求項13又は14に記載の撮像装置における制御方法。
【請求項16】
前記情報表示工程では、合焦している撮像領域に対応する画面領域の表示を強調する
ことを特徴とする、請求項15に記載の撮像装置における制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−109107(P2013−109107A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−253181(P2011−253181)
【出願日】平成23年11月18日(2011.11.18)
【出願人】(390019839)三星電子株式会社 (8,520)
【氏名又は名称原語表記】Samsung Electronics Co.,Ltd.
【住所又は居所原語表記】129,Samsung−ro,Yeongtong−gu,Suwon−si,Gyeonggi−do,Republic of Korea
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月18日(2011.11.18)
【出願人】(390019839)三星電子株式会社 (8,520)
【氏名又は名称原語表記】Samsung Electronics Co.,Ltd.
【住所又は居所原語表記】129,Samsung−ro,Yeongtong−gu,Suwon−si,Gyeonggi−do,Republic of Korea
【Fターム(参考)】
[ Back to top ]