
撮像装置、撮像方法およびプログラム
【課題】被写体検出による被写体領域とトラッキングによる追跡領域とを適切に併用して撮像に係る各種の制御を遂行する。
【解決手段】撮像部124は、被写体を撮像し画像データを生成する。被写体検出部170は、取得された画像データについて、被写体領域を特定する。トラッキング部174は、取得された画像データについて、追跡対象である追跡領域を特定する。距離判断部176は、特定された追跡領域から所定距離内に、特定された被写体領域が含まれるか否かを判断する。領域統合部178は、特定された被写体領域が所定距離内に含まれる場合、特定された追跡領域に関する情報に被写体領域に関する情報を統合する。制御部は、領域統合部によって被写体領域に関する情報が追跡領域の情報に統合されると、その被写体領域を使用して撮像の制御を行う。
【解決手段】撮像部124は、被写体を撮像し画像データを生成する。被写体検出部170は、取得された画像データについて、被写体領域を特定する。トラッキング部174は、取得された画像データについて、追跡対象である追跡領域を特定する。距離判断部176は、特定された追跡領域から所定距離内に、特定された被写体領域が含まれるか否かを判断する。領域統合部178は、特定された被写体領域が所定距離内に含まれる場合、特定された追跡領域に関する情報に被写体領域に関する情報を統合する。制御部は、領域統合部によって被写体領域に関する情報が追跡領域の情報に統合されると、その被写体領域を使用して撮像の制御を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被写体を撮像して得られた画像データから特定された所定の領域を使用して撮像に係る各種制御を行う撮像装置、撮像方法およびプログラムに関する。
【背景技術】
【0002】
近年、デジタルスチルカメラやデジタルビデオカメラ等の撮像装置には、撮像した画像中の人の顔を検出する顔検出技術が採用されている。このような撮像装置は、顔検出技術で検出された顔の情報(輝度、位置等)に基づいて、オートフォーカスや自動露出等の制御を行っている。
【0003】
この顔検出技術を拡張し、顔検出された顔領域に基づいて体領域の検出(体検出)を行い、顔領域と体領域に基づいて、オートフォーカスを行う技術が提案されている(例えば、特許文献1)。かかる技術によれば、撮像装置は、測距のための対象領域を広く取ってオートフォーカスを高精度に遂行できる。
【0004】
また、デジタルスチルカメラやデジタルビデオカメラ等の撮像装置では、撮像対象となる被写体を追跡するいわゆるトラッキング技術が従来から用いられている。例えば、撮像された画像データの色情報を利用するトラッキング技術では、撮像装置は、まず、撮像された画像データのフレーム内の追跡領域の色パターンを特定する。次にその追跡領域の特定されたフレームの次のフレームに関し、前フレームの追跡領域の座標近傍の領域の色パターンを特定し、特定された両フレームの色パターンを比較する。そして、追跡領域と色が類似すると見なした領域を、次フレームにおける新たな追跡領域と見なす。以降、撮像装置は、フレーム毎に同様の処理を繰り返しつつ、追跡領域の画像の情報(輝度、位置等)に基づいた制御を行う。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−76786号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、例えば、猫や犬等のペットを撮像する場合も、その顔に対して顔検出技術を用いることで、上述したオートフォーカスや自動露出等の制御を行うことができる。しかし、特許文献1の技術を用いても、ペットは顔に対する胴体の位置や胴体の形状が特定し難く胴体を検出することが難しい。さらに、撮像者がペットを、顔が撮像装置に向いた状態に維持させることは容易ではなく、ペットを撮像して得られた画像データから所定領域を特定して、その特定された領域を使用してオートフォーカスや自動露出等の制御を実施することは困難であった。
【0007】
ここで、上述したトラッキング技術を顔検出技術と併用すれば、ある被写体が顔検出された後、顔を撮像装置から背けられて顔をロストして(見失って)しまっても、撮像装置は、その被写体を色パターンによって追跡し続け、制御を遂行することができる。一方、このような処理を経て追跡されている被写体が、再度、撮像装置の方へ顔を向けると、新たに顔が検出される。このとき、撮像装置は、同一の被写体であるはずの、検出された顔と、追跡し続けていた被写体とを、別の被写体として認識してしまう。この場合、本来、検出された顔の情報も参照すべきところ、追跡領域の情報のみを参照してしまい、適切な制御が行われないおそれがある。
【0008】
そこで、本発明は、このような課題に鑑み、被写体検出による被写体領域とトラッキングによる追跡領域とを適切に併用して撮像に係る各種の制御を遂行可能な撮像装置、撮像方法およびプログラムを提供することを目的としている。
【課題を解決するための手段】
【0009】
上記課題を解決するために、本発明の、被写体を撮像し画像データを生成する撮像部を備えた撮像装置は、生成された画像データについて、被写体領域を特定する被写体検出部と、生成された画像データについて、追跡対象である追跡領域を特定するトラッキング部と、特定された追跡領域から所定距離内に、特定された被写体領域が含まれるか否かを判断する距離判断部と、特定された被写体領域が所定距離内に含まれる場合、特定された追跡領域に関する情報に被写体領域に関する情報を統合する領域統合部と、領域統合部によって被写体領域に関する情報が追跡領域の情報に統合されると、その被写体領域を使用して撮像の制御を行う制御部と、を備えることを特徴とする。
【0010】
領域統合部によって被写体領域に関する情報が追跡領域の情報に統合されると、制御部はその被写体領域を対象としてオートフォーカスまたは自動露出の制御を行ってもよい。
【0011】
画像データに基づく画像を表示する表示部をさらに備え、領域統合部によって被写体領域に関する情報が追跡領域の情報に統合されると、制御部はその被写体領域のみに指標を重畳して表示部に表示させる制御をさらに行ってもよい。
【0012】
距離判断部は、特定された被写体領域の大きさを導出し、所定距離を、被写体領域の大きさに比例して設定してもよい。
【0013】
上記課題を解決するために、本発明の撮像方法は、被写体を撮像し画像データを生成し、生成した画像データについて、被写体領域を特定し、生成した画像データについて、追跡対象である追跡領域を特定し、特定した追跡領域から所定距離内に、特定した被写体領域が含まれるか否かを判断し、特定した被写体領域が所定距離内に含まれる場合、特定した追跡領域に関する情報に被写体領域に関する情報を統合し、特定した被写体領域に関する情報に被写体領域に関する情報が統合されると、その被写体領域を使用して撮像の制御を行うことを特徴とする。
【0014】
上記課題を解決するために、本発明のプログラムは、被写体が撮像されることで生成された画像データを処理するコンピュータを、生成された画像データについて、被写体領域を特定する被写体検出部と、生成された画像データについて、追跡対象である追跡領域を特定するトラッキング部と、特定された追跡領域から所定距離内に、特定された被写体領域が含まれるか否かを判断する距離判断部と、特定された被写体領域が所定距離内に含まれる場合、特定された追跡領域に関する情報に被写体領域に関する情報を統合する領域統合部と、領域統合部によって被写体領域に関する情報が追跡領域の情報に統合されると、その被写体領域を使用して撮像の制御を行う制御部と、して機能させる。
【発明の効果】
【0015】
本発明によれば、被写体検出による被写体領域とトラッキングによる追跡領域とを適切に併用して撮像に係る各種の制御を遂行することが可能となる。
【図面の簡単な説明】
【0016】
【図1】撮像装置の概略的な機能を示した機能ブロック図である。
【図2】撮像装置の一例を示した外観図である。
【図3】領域統合処理を説明するための説明図である。
【図4】領域統合処理を説明するための説明図である。
【図5】撮像方法の全体的な流れを示したフローチャートである。
【発明を実施するための形態】
【0017】
以下に添付図面を参照しながら、本発明の好適な実施形態について詳細に説明する。かかる実施形態に示す寸法、材料、その他具体的な数値などは、発明の理解を容易とするための例示にすぎず、特に断る場合を除き、本発明を限定するものではない。なお、本明細書及び図面において、実質的に同一の機能、構成を有する要素については、同一の符号を付することにより重複説明を省略し、また本発明に直接関係のない要素は図示を省略する。
【0018】
本実施形態の撮像装置100は、被写体検出とトラッキングとを併用した場合に、被写体検出とトラッキングとで、同一の被写体の画像データに対して複数の領域を特定してしまった場合に、オートフォーカスや自動露出等、あるいは画像データに対する指標の重畳といった撮像に係る各種制御を適切に行うことができる。以下、このような撮像装置100について詳述する。
【0019】
(撮像装置100)
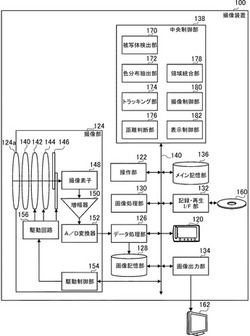
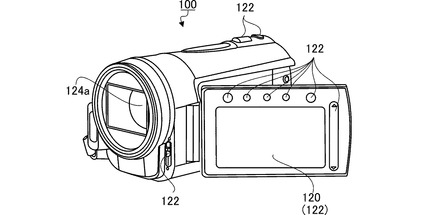
図1は、撮像装置100の概略的な機能を示した機能ブロック図であり、図2は、撮像装置100の一例を示した外観図である。撮像装置100は、表示部120と、操作部122と、撮像部124と、データ処理部126と、画像記憶部128と、画像処理部130と、記録・再生I/F部132と、画像出力部134と、メイン記憶部136と、中央制御部138とを含んで構成される。なお、操作部122と、データ処理部126、画像記憶部128、画像処理部130、記録・再生I/F部132、画像出力部134、メイン記憶部136、中央制御部138、および後述する駆動制御部154はシステムバス140を介して接続されている。
【0020】
表示部120は、液晶ディスプレイ、有機EL(Electro Luminescence)ディスプレイ等で構成され、表示用画像データ(ビュー画像データ)に基づく画像を表示する(以下、単に「表示用画像データを表示する」と表現する)。撮像者は表示部120に表示された表示用画像を参照し、撮像された画像データを確認することができ、被写体を所望する位置および大きさで捉えることが可能となる。
【0021】
また、表示部120の表面には、操作部122の一部であるタッチセンサが配置され、撮像者がタッチした位置情報は、操作部122の出力として中央制御部138に入力される。
【0022】
操作部122は、タッチセンサ、レリーズスイッチを含む操作キー、十字キー、ジョイスティック等で構成され、撮像者からの撮像モードの切り換え等の操作入力を受け付ける。この撮像モードには、例えば、野外、屋内、夜景といった環境に適応させるためのモードの他、検出した人の顔を優先的に処理対象としてAF(自動焦点)やAE(自動露出)制御を行う「人顔優先AF&AE」、撮像者のタッチセンサへのタッチ位置を優先的に処理対象としてAFやAE制御を行う「タッチ追尾AF&AE」、検出したペットの顔を優先的に処理対象としてAFやAE制御を行う「ペット顔優先AF&AE」等のAF&AEの優先順位を定めたモードが含まれる。
【0023】
撮像部124は、撮像レンズ124aを通じて被写体を撮像し画像データを生成する。撮像部124は、具体的に、近赤外光を遮るIRカットフィルタ140、ズーム機能を実現するためのズームレンズ142、焦点調整に用いられるフォーカスレンズ144、露光調整に用いられる絞り146、撮像レンズ124aを通じて入射する被写体像等の光を光電変換し画像信号を生成するCCD(Charge Coupled Devices)等で構成される撮像素子(撮像回路)148、撮像素子148からの画像信号を増幅する増幅器150、増幅された画像信号をデジタルデータである画像データに変換するA/D変換器152、ズームレンズ142、フォーカスレンズ144および絞り146の駆動を制御する駆動制御部154とその駆動回路156とを含んで構成される。
【0024】
データ処理部126は、入力された画像データに対して輝度データや色差データを形成する等の処理を行い、画像記憶部128に伝達する。また、データ処理部126は、画像データの平均輝度を導出し中央制御部138へ出力する。
【0025】
画像記憶部128は、SDRAM(Synchronous-DRAM)等のバッファメモリで構成され、画像データを一時的に記憶する。画像記憶部128に記憶された画像データは、画像処理部130、中央制御部138等に参照される。
【0026】
画像処理部130は、画像記憶部128から画像データを取得し、MPEG−2、MPEG−4、またはMPEG−4/AVC等の形式で符号化処理を施して記録用のデータである記録データを生成する。また、画像処理部130は、後述する表示制御部182の制御信号に応じ画像記憶部128から取得した画像データを縮小し表示用画像データを生成し、表示部120に出力する。一方、後述する任意の記録媒体160に記録された記録データを再生する場合、画像処理部130は記録データを復号する処理を実行する。
【0027】
記録・再生I/F部132は、画像処理部130が生成した記録データ(データストリーム)を任意の記録媒体160に記録する。任意の記録媒体160としては、DVDやBDといった電源不要な媒体や、RAM、EEPROM、不揮発性RAM、フラッシュメモリ、HDD等の電源を要する媒体を適用することができる。また、記録・再生I/F部132は、任意の記録媒体160から記録データを読み出し、画像処理部130に出力する。
【0028】
画像出力部134は、画像記憶部128および画像処理部130からの画像データを、例えば、液晶表示装置、プロジェクタ等の外部装置162に出力する。
【0029】
メイン記憶部136は、SDRAM等のバッファメモリで構成され、中央制御部138で処理されるプログラム等を記憶する。またメイン記憶部136は、後述する被写体検出処理およびトラッキング処理に用いる画像データを記憶する。
【0030】
ただし、トラッキング処理が開始されている場合、画像記憶部128に記憶された画像データは、メイン記憶部136の第1領域、第2領域に転送される。そして、被写体検出処理では第1領域に記憶された画像データが、トラッキング処理では第2領域に記憶された画像データがそれぞれ用いられる。
【0031】
ここで、同じ画像データを第1領域と第2領域それぞれに記憶させるのは、被写体検出処理の方がトラッキング処理よりも時間がかかるためである。例えば、被写体検出処理は5フレーム期間程度の時間がかかるのに対し、トラッキング処理は1フレーム期間内で終了する。したがって、被写体検出処理では5フレーム毎に1度画像データが記憶される。被写体検出処理とトラッキング処理とにかかる時間がいずれも1フレーム期間内で終了する場合、メイン記憶部136の第1領域と第2領域それぞれに記憶させずともよい。
【0032】
中央制御部138は、中央処理装置(CPU)、プログラム等が記憶されたROM、ワークエリアとしてのRAM等を含む半導体集積回路により撮像装置100全体を管理および制御し、撮像等に必要となる各種演算を実行する。また、中央制御部138は、被写体検出部170、色分布抽出部172、トラッキング部174、距離判断部176、領域統合部178、撮像制御部180、表示制御部182、としても機能する。
【0033】
被写体検出部170は、メイン記憶部136の第1領域に記憶されている画像データについて、輝度データから被写体(例えば、人やペットの顔、顔以外の部位)を検出する。本実施形態においては、被写体検出部170は、被写体として、猫や犬などのペットの顔を検出する例を挙げる。
【0034】
ここでは、被写体検出部170は、例えば、顔全体の輪郭に対応した基準テンプレートを用いたテンプレートマッチングによって顔を検出することとする。しかし、被写体検出部170は、顔の構成要素(目、鼻、耳等)に基づくテンプレートマッチングや、特開2010−2960号公報に示されるように、Adaboostアルゴリズムによって生成される複数の識別器をカスケード接続して用いる技術等、既存のどのような顔検出技術を用いてもよい。いずれにしても、被写体検出部170は、検出した顔の位置、大きさ、傾き等を示す顔情報を特定し、メイン記憶部136に記憶させる。
【0035】
色分布抽出部172は、メイン記憶部136の第1領域に記憶されている画像データのうち、顔中心位置およびその周辺領域の輝度データと色差データとをRGBデータに変換し、色分布を求める。本実施形態において、周辺領域の外縁は、例えば、水平方向11画素、垂直方向11画素からなる矩形領域とするが、周辺領域の形状は、矩形に限定されず、多角形であってもよいし円形であってもよいし、その他、どのような形状、大きさであってもよい。
【0036】
本実施形態において、色分布は、色ヒストグラムで示される。色ヒストグラムは、以下のように導出される。すなわち、対象となる画像データのそれぞれの画素が、RGBの色空間を各軸(R軸、G軸、B軸)に垂直にN分割(例えば、N=16)したときの分割された各空間が示す色の範囲のいずれに含まれるかが判断される。そして、色ヒストグラムは、それぞれの色の範囲に含まれる画素の数が計数され、色の範囲とその色の範囲に含まれる画素の数とを対応付けて導出される。ただし、Nは予め定められた自然数とする。また、色ヒストグラムは、各軸に垂直な分割数を、軸毎に異ならせて導出されてもよい。
【0037】
また、色分布抽出部172は、画像データを、RGBデータの代わりにHSV(Hue Saturation Value)データに変換して色分布を求めてもよい。この場合、色ヒストグラムは、HSVの色空間で各軸(H軸、S軸、V軸)に垂直にN分割したときの分割された各空間が示す色の範囲についてRGBデータと同様に導出される。
【0038】
そして、色分布抽出部172は、導出した色分布の情報(色ヒストグラムおよび色ヒストグラムの導出元の画像データの位置情報)を、導出元の被写体領域に関連付けてメイン記憶部136に記憶させる。
【0039】
トラッキング部174は、メイン記憶部136の第2領域に記憶されている画像データについて、色ヒストグラムの比較によって、追跡対象である追跡領域を特定する。
【0040】
具体的には、トラッキング部174は、まず、メイン記憶部136に記憶された色分布の情報を読み出す。そして、トラッキング部174は、読み出した色分布の情報に含まれる位置近傍の比較領域の画像データから色ヒストグラムを導出する。
【0041】
その後、トラッキング部174は、導出した色ヒストグラムと、読み出した色分布の情報に含まれる色ヒストグラムとのヒストグラムインターセクションを導出する。
【0042】
ここで、ヒストグラムインターセクションは、2つの色ヒストグラムについて、同じ色の範囲の画素数を比較し、少ない方の画素数のみを抽出し、すべての色の範囲について抽出された画素数の総和を取ったものである。比較する画像データの色分布が類似しているほど、ヒストグラムインターセクションの値は大きくなる。
【0043】
次に、トラッキング部174は、所定範囲内で、水平方向や垂直方向に1画素ずつ、比較領域を移動し、各位置におけるヒストグラムインターセクションを導出する。そして、トラッキング部174は、最もヒストグラムインターセクションの値が大きい位置に被写体が移動したものと見なし、その位置情報をメイン記憶部136に記憶させる。
【0044】
色ヒストグラムの比較によって追跡領域を特定する構成により、トラッキング部174は、被写体の形状が変化して特定し難い、例えば、ペットの胴体等も追跡可能となる。
【0045】
ただし、トラッキング処理としては、色ヒストグラムを用いたヒストグラムインターセクションに限らず、色分布の特徴量の類似度を比較する既存のどのような技術を用いてもよい。あるいは、単色の色の類似度を比較する技術であってもよいし、色情報と形状情報等を組み合わせた技術を用いてもよい。
【0046】
距離判断部176は、トラッキング部174が特定した追跡領域から所定距離内に、被写体検出部170が特定した被写体領域が含まれるか否かを判断する。ここで、追跡領域と被写体領域との距離は、画像データにおけるそれぞれの領域の位置から導出される。例えば、画像データにおける画面内の左上端から、水平方向Px1画素、垂直方向Py1画素の位置に被写体領域があり、追跡領域が水平方向Px2画素、垂直方向Py2画素の位置にある場合、追跡領域と被写体領域の距離である距離Lは、以下の数式1で導出される。ただし、Px1、Px2、Py1、Py2は整数である。
【数1】

…(数式1)
【0047】
ここで、距離導出の起点となる位置は、追跡領域と被写体領域それぞれにおける中心でもよいし、両領域の距離が最も近い位置でもよい。また、被写体領域側の起点については、顔の中心でもよいし、左右の眼の中心位置でもよい。いずれにしても、予め定められた基準に則って、追跡領域と被写体領域それぞれの起点が定められることとする。
【0048】
領域統合部178は、被写体領域が追跡領域から所定距離内に含まれる場合、追跡領域に関する情報に被写体領域に関する情報を統合する。かかる統合処理については、後に詳述する。
【0049】
撮像制御部180は、撮像の際の制御としてフォーカス制御を遂行する。まず、撮像制御部180は、被写体領域または追跡領域の画像データをメイン記憶部136から読み出す。そして、撮像制御部180は、読み出した画像データを用い、コントラスト法によって自動焦点調整を行う。コントラスト法は、撮像素子148上の像のボケの程度とコントラストの間に相関があり、焦点が合ったときにコントラストが最大となることを利用して焦点合わせを行う技術である。
【0050】
ここでは、コントラストの大きさは、画像データに含まれる高周波成分の割合によって評価される。撮像制御部180は、読み出した画像データのうちの輝度データにBPF(バンドパスフィルタ)をかけて高周波成分を抽出し、抽出された高周波成分の絶対値の積分値を評価値とし、評価値が最大となるようにオートフォーカス演算を行う。そして、撮像制御部180は、演算結果に応じて駆動制御部154に制御信号を出力し、駆動回路156を制御して合焦動作を行わせる。
【0051】
また、撮像制御部180は、撮像の際の制御として露光調整の制御を遂行する。まず、撮像制御部180は、被写体領域または追跡領域の画像データをメイン記憶部136から読み出す。そして、撮像制御部180は、画像データに含まれる輝度データについて平均値を導出し、平均値が所定の範囲に含まれるように、駆動制御部154に制御信号を出力して、絞り146の絞り量を調整させる。
【0052】
表示制御部182は、画像処理部130に表示用画像データを生成させ、表示部120に表示させる。このとき、表示制御部182は、撮像の際の制御として被写体領域および追跡領域を示す指標を重畳する。
【0053】
続いて、上述した撮像装置100による、被写体領域と追跡領域との特定から統合処理、および、その後の制御について詳述する。
【0054】
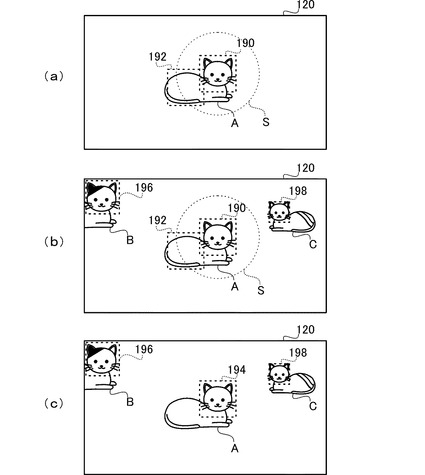
(領域の特定および統合処理)
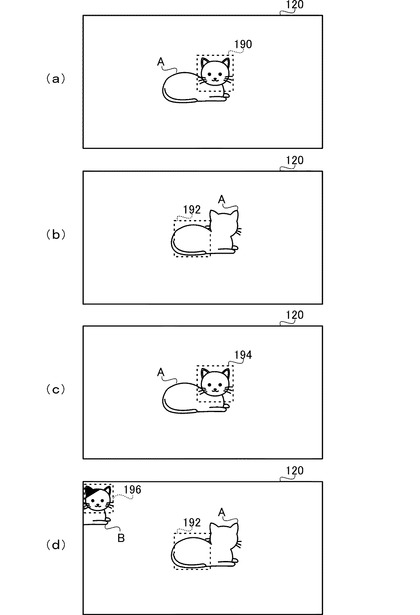
図3および図4は、領域統合処理を説明するための説明図である。撮像開始時、図3(a)に示すように、猫Aが撮像装置100側に顔を向けている場合、被写体検出部170は、猫Aの顔を検出し、被写体領域を特定する。この時点では、追跡領域は特定されておらず、距離判断部176や領域統合部178による処理は行われない。
【0055】
表示制御部182は、特定された被写体領域に、顔の大きさに比例して決定される大きさの指標(ここでは、枠190)を、表示用画像データに重畳して表示部120に表示させる。
【0056】
あるフレームXにおいて猫Aの顔に対応する被写体領域を特定した後、数フレームが経過すると、次の被写体特定処理の結果が導出される。次の被写体特定処理の結果、フレームXにおいて特定した被写体領域から所定の距離の範囲内で被写体領域が特定された場合、被写体特定部170は、同じ被写体(猫Aの顔)を追尾していると判断する。
【0057】
一方、次の被写体特定処理の結果、フレームXにおいて特定した被写体領域から所定の距離の範囲内で被写体領域が特定されなかった場合、被写体特定部170は、対象をロストしたと判断する(ロスト判断処理)。ロストは対象を見失うことであり、ここでは、対象は、被写体領域そのもの、または被写体領域に対応した被写体(例えば、猫Aの顔)を示す。
【0058】
そして、所定の契機によって、その契機に対応した被写体についてのトラッキング処理が開始される。ここで、所定の契機は、例えば、枠190に対応する位置のタッチセンサ(操作部122)へのタッチ操作、1つ以上の顔を検出したこと、または、検出された顔が予め登録された顔と同一と判断されたこと等がある。
【0059】
また、タッチセンサの枠190のない位置にタッチ操作があった場合、タッチされた位置を中心とする予め定められた大きさの領域に対応する画像データをトラッキングの対象としてトラッキング処理が開始されてもよい。
【0060】
所定の契機によってトラッキング処理が開始されると、被写体検出部170は、第1領域に記憶された画像データを用いて被写体検出処理を継続する一方、色分布抽出部172およびトラッキング部174は、第2領域に記憶された画像データを用いてトラッキング処理を行う。
【0061】
ただし、トラッキング処理によって特定された追跡領域は、その追跡領域の特定元である被写体領域と、同一の被写体を示すものとして関連付けられる。そして、表示制御部182は、その追跡領域と関連付けられた被写体領域がロストされるまで、追跡領域に指標を重畳せず、撮像制御部180は、オートフォーカスおよび露光調整の処理に追跡領域と関連付けられた被写体領域の画像データを用いる。ただし、被写体領域がロストされるまで、被写体領域と追跡領域とは大凡等しくなる。
【0062】
そして、数フレーム後、図3(b)に示すように、猫Aが撮像装置100から顔を背け、被写体特定部170は被写体領域をロストしたとする。表示制御部182は、追跡領域の特定元である被写体領域をロストしたことを契機に、追跡領域を示す指標である枠192を表示用画像データに重畳して、表示部120に表示させる。このとき、枠192の大きさは、トラッキング処理の対象とした画像データが顔であった場合、その顔の大きさに応じた大きさとする。
【0063】
また、枠192の大きさは、追跡領域内に、ヒストグラムインターセクションの値が予め定められた閾値以上となった比較領域の面積が大きい程、大きく設定されてもよい。
【0064】
続いて、追跡領域を示す指標である枠192が表示されたまま、数フレームが経過した後、猫Aが再び撮像装置100側に顔を向けたとする。このとき、単に、被写体検出部170が検出した猫Aの顔に枠190を重畳した場合、図4(a)に示すように、同一の猫Aについて、2つの指標(枠190、枠192)が重畳されてしまう。
【0065】
そこで、本実施形態では、領域統合処理が行われる。まず、距離判断部176は、追跡領域から所定距離内に被写体領域が含まれるか否かを判断する。図4(a)のように、被写体領域が追跡領域から所定距離内に含まれる場合、距離判断部176は、この追跡領域と被写体領域とは同一の被写体を対象としているものと見なし、追跡領域と被写体領域とを関連付ける。図4(a)に破線の円Sで所定距離の範囲の一例を示す。
【0066】
ただし、距離判断部176は、被写体領域の大きさを導出し、所定距離を、被写体領域の大きさに比例して設定する。本実施形態においては、所定距離は、例えば、被写体領域の大きさの3倍とする。ここで、被写体領域の大きさ(ここでは猫の顔の大きさ)は、例えば、被写体領域の直径とする。ただし、被写体領域の大きさとして、例えば、被写体領域の面積の平方根を用いてもよいし、被写体領域の水平方向や垂直方向の最大幅を用いてもよい。また、ここでは、所定距離は、被写体領域の大きさの3倍としたが、例えば、2倍、4倍、5倍等、被写体の特性に応じた値とすることが望ましい。
【0067】
かかる構成により、距離判断部176は、統合の対象となる被写体領域の選別を、被写体の大きさに応じた判断基準によって高精度に遂行可能となる。
【0068】
また、図4(b)に示すように、同じフレームにおいて、複数の被写体領域(図4(b)において猫Aの顔に重畳された枠190、猫Bの顔に重畳された枠196、猫Cの顔に重畳された枠198で示す)が特定された場合、距離判断部176は、追跡領域に最も近い被写体領域の大きさを導出して、所定距離を、例えば、導出された大きさの3倍に設定する。そして、距離判断部176は、追跡領域から所定距離内にその被写体領域がない場合、次に追跡領域に近い被写体領域について、所定距離の設定および所定距離内にあるか否かの判断を行う。図4(b)に破線の円Sで所定距離の範囲の一例を示す。
【0069】
こうして、距離判断部176は、被写体領域が所定距離内にあると判断されるか、すべての被写体領域が所定距離内にないと判断されるまで、追跡領域から近い被写体領域から順次、判断処理を行う。図4(b)の場合、一番近い被写体領域が、所定距離内にあったものとする。
【0070】
また、被写体検出部170が被写体を検出する範囲を、例えば、追跡領域から予め定められた所定範囲内とすることで、距離判断部176による判断処理の対象となる被写体領域の数を抑制し、処理負荷を低減させてもよい。
【0071】
さらに、距離判断部176は、所定距離を、所定の固定値として設定してもよい。かかる構成により、距離判断部176は、統合の対象となる被写体領域の選別を、低処理負荷で遂行できる。
【0072】
被写体領域が追跡領域から所定距離内に含まれる場合、領域統合部178は、追跡領域に関する情報に被写体領域に関する情報を統合する。所定距離内に含まれない場合、領域統合部178は、特に処理は行わない。
【0073】
ここで、「情報を統合する」とは、例えば、追跡領域の位置情報に、被写体領域の位置情報を上書きすることである。追跡領域の位置情報に、被写体領域の位置情報を上書きすることで、トラッキング部174は、被写体領域の位置からトラッキング処理を再開でき、後に再び被写体領域をロストしても、追跡領域が被写体に近い位置を示し被写体の胴体等を追跡領域として特定できる可能性が高まる。
【0074】
また、「情報を統合する」具体的な処理として、被写体領域と追跡領域との関連付け処理も含む。領域統合部178は、追跡領域から所定距離内にあった被写体領域を、その追跡領域と関連付ける。
【0075】
さらに、「情報を統合する」具体的な処理として、画像データの位置情報を上書きすることに加えて、被写体領域の輝度データや色差データに基づいて、色分布情報を導出しなおすようにしてもよい。かかる構成により、トラッキング部174は、その後のトラッキング処理の精度を向上することができる。
【0076】
そして、表示制御部182は、領域統合部178によって被写体領域に関する情報が追跡領域の情報に統合されると、表示用画像データに対し、追跡領域には指標を重畳せず、追跡領域と関連付けられた被写体領域のみに指標を重畳して表示部120に表示させる。すなわち、図3(c)に示すように、猫Aの顔にのみ、枠194が重畳されることとなる。このとき、枠194の大きさは、検出された被写体領域の大きさに応じたものとする。また、追跡情報として、この枠194の大きさで更新する。
【0077】
図4(b)に示す、同じフレームにおいて、複数の被写体領域が特定された場合も同様に、表示制御部182は、領域統合部178によって被写体領域に関する情報が追跡領域の情報に統合されると、図4(c)に示すように、猫Aについては、顔にのみ、枠194が重畳されることとなる。
【0078】
このように、撮像装置100は、表示部120において、同一の被写体に対して、複数の指標が表示されてしまう事態を回避でき、タッチセンサへのタッチ操作の操作性や表示部120の被写体の視認性を向上することが可能となる。
【0079】
また、撮像制御部180は、領域統合部178によって被写体領域に関する情報が追跡領域の情報に統合されると、追跡領域に関連付けられた被写体領域を対象としてオートフォーカスまたは自動露出の制御を行う。つまり、撮像制御部180は、追跡領域(猫Aの胴体)への情報統合処理の対象となった被写体領域(猫Aの顔)の画像データを参照して、オートフォーカスや自動露出の制御を行う。かかる構成により、撮像制御部180は、被写体の顔に合わせて適切に撮像制御を遂行することが可能となる。
【0080】
領域統合部178による領域統合処理後、トラッキング部174は、情報が統合された追跡領域の画像データの位置情報に示される領域からトラッキング処理を再開する。すなわち、トラッキング部174は、被写体領域およびその近傍を対象としてトラッキング処理を行う。
【0081】
また、図3(d)に示すように、猫Aは撮像装置100から顔を背けたままで、他の猫Bの顔が映り込んだ場合、追跡領域と新たな猫Bの顔に対応する被写体領域とが所定距離より離れていれば、猫Aと猫Bとを異なる被写体として識別可能となるため、表示制御部182は、猫Aの追跡領域を示す枠192と、猫Bの被写体領域を示す枠196とをいずれも表示画像データに重畳して表示部120に表示させる。
【0082】
上述したように、本実施形態の撮像装置100は、所定距離内に含まれる被写体領域と追跡領域を同一の被写体と見なし、それぞれに関する情報を統合する。そのため、例えば、オートフォーカスや自動露出等の撮像制御を適切に遂行でき、また、表示部120に表示する指標を統合することで視認性や操作性を向上可能となる。
【0083】
また、コンピュータを、撮像装置100として機能させるプログラムや当該プログラムを記録した、コンピュータで読み取り可能なフレキシブルディスク、光磁気ディスク、ROM、EPROM、EEPROM、CD、DVD、BD等の記録媒体も提供される。ここで、プログラムは、任意の言語や記述方法にて記述されたデータ処理手段をいう。
【0084】
(撮像方法)
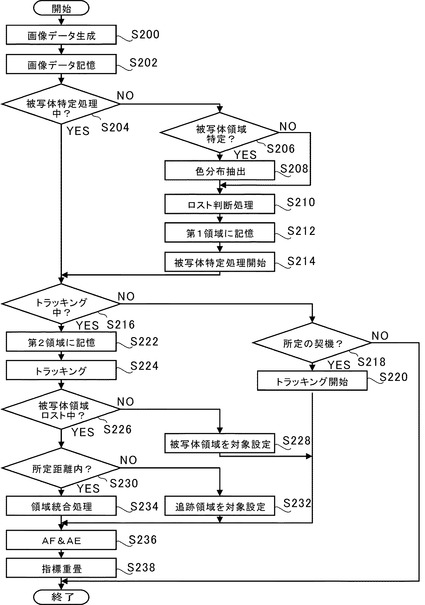
次に、上述した撮像装置100を用いて、被写体を撮像する撮像方法の一連の流れを説明する。図5は、撮像方法の全体的な流れを示したフローチャートである。かかる処理は、被写体特定処理およびトラッキング処理を並行して行う撮像モードにて撮像中、所定のフレーム周期で繰り返し実行される。
【0085】
図5に示すように、撮像部124は、被写体を撮像し1フレームの画像データを生成する(S200)。その画像データは画像記憶部128に記憶される(S202)。
【0086】
中央制御部138は、以前のフレームの画像データについての被写体領域の特定処理が継続中であるか否かを判断する(S204)。継続中である場合(S204におけるYES)、トラッキング処理の判定(S216)に処理を移す。
【0087】
以前のフレームの画像データについての被写体領域の特定処理が終了している場合(S204におけるNO)、色分布抽出部172は、被写体領域が特定されたか否か、すなわち、被写体領域の特定処理において被写体として特定できる画像データがあったか否かを判断する(S206)。特定されなかった場合(S206におけるNO)、ロスト判断処理(S210)に処理を移す。
【0088】
被写体領域が特定された場合(S206におけるYES)、色分布抽出部172は、特定された被写体領域の色分布を導出して、メイン記憶部136に導出元の被写体領域に関連付けて記憶させる(S208)。
【0089】
続いて、被写体特定部170は、ロスト判断処理を行う(S210)。ロスト判断処理は、上述したように、被写体特定処理の結果、あるフレームXにおいて特定された被写体領域について、次の被写体特定処理の結果、所定の距離の範囲内で被写体領域が特定された場合、被写体特定部170は、同じ被写体を追尾していると判断し、特定されなかった場合、被写体特定部170は、対象をロストしたと判断する。
【0090】
そして、中央制御部138は、画像記憶部128に記憶された新たな1フレームの画像データをメイン記憶部136の第1領域に記憶させる(S212)。被写体検出部170は、被写体特定処理を開始する(S214)。
【0091】
そして、中央制御部138は、トラッキング処理が開始しているか否かを判断し(S216)、開始していない場合(S216におけるNO)、中央制御部138は、例えば、タッチセンサへのタッチ操作といった所定の契機が発生したか否かを判断する(S218)。発生していない場合(S218におけるNO)、処理を終了する。
【0092】
所定の契機が発生した場合(S218におけるYES)、トラッキング部174は、トラッキング処理を開始する(S220)。そして、撮像制御処理(S238)に処理を移す。
【0093】
すでにトラッキング処理が開始している場合(S216におけるYES)、中央制御部138は、画像記憶部128に記憶された1フレームの画像データをメイン記憶部136の第2領域に記憶させる(S222)。トラッキング部174は、前フレームから継続したトラッキング処理を行う(S224)。このとき、トラッキング処理によって追跡領域が特定されると、その追跡領域は、追跡領域の特定元である被写体領域と、同一の被写体を示すものとして関連付けられる。
【0094】
続いて、中央制御部138は、ロスト判断処理ステップS210において、追跡領域に関連付けられた被写体領域をロストしたと判断されたか否かを判断する(S226)。ロストしていない場合(S226におけるNO)、中央制御部138は、その被写体領域を、指標の重畳や撮像制御の対象として設定する(S228)。そして、撮像制御処理(S236)に処理を移す。
【0095】
被写体領域をロストしている場合(S226におけるYES)、距離判断部176は、追跡領域から所定距離内に被写体領域が含まれるか否かを判断する(S230)。含まれない場合(S230におけるNO)、中央制御部138は、追跡領域を、指標の重畳や撮像制御の対象として設定する(S232)。そして、撮像制御処理(S236)に処理を移す。
【0096】
追跡領域から所定距離内に被写体領域が含まれる場合(S230におけるYES)、領域統合部178は、被写体領域の位置情報を、追跡領域の位置情報に上書きしたり、追跡領域から所定距離内にあった被写体領域を、その追跡領域と関連付けたりするといった情報統合処理を行う(S234)。
【0097】
そして、設定された制御の対象に対して、撮像制御部180は、オートフォーカスや自動露出の処理を行い(S236)、表示制御部182は、指標の重畳を行った表示用画像データを表示部120に表示させる(S238)。
【0098】
上述した撮像装置100を用いた撮像方法によっても、オートフォーカスや自動露出等の撮像制御を適切に遂行でき、また、表示部120に表示する指標を統合することで視認性や操作性を向上可能となる。
【0099】
以上、添付図面を参照しながら本発明の好適な実施形態について説明したが、本発明はかかる実施形態に限定されないことは言うまでもない。当業者であれば、特許請求の範囲に記載された範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、それらについても当然に本発明の技術的範囲に属するものと了解される。
【0100】
なお、本明細書の撮像方法の各工程は、必ずしもフローチャートとして記載された順序に沿って時系列に処理する必要はなく、並列的あるいはサブルーチンによる処理を含んでもよい。
【産業上の利用可能性】
【0101】
本発明は、被写体を撮像して得られた画像データから特定された所定の領域を使用して撮像に係る各種制御を行う撮像装置、撮像方法およびプログラムに利用することができる。
【符号の説明】
【0102】
100 …撮像装置
120 …表示部
124 …撮像部
170 …被写体検出部
174 …トラッキング部
176 …距離判断部
178 …領域統合部
180 …撮像制御部
182 …表示制御部
【技術分野】
【0001】
本発明は、被写体を撮像して得られた画像データから特定された所定の領域を使用して撮像に係る各種制御を行う撮像装置、撮像方法およびプログラムに関する。
【背景技術】
【0002】
近年、デジタルスチルカメラやデジタルビデオカメラ等の撮像装置には、撮像した画像中の人の顔を検出する顔検出技術が採用されている。このような撮像装置は、顔検出技術で検出された顔の情報(輝度、位置等)に基づいて、オートフォーカスや自動露出等の制御を行っている。
【0003】
この顔検出技術を拡張し、顔検出された顔領域に基づいて体領域の検出(体検出)を行い、顔領域と体領域に基づいて、オートフォーカスを行う技術が提案されている(例えば、特許文献1)。かかる技術によれば、撮像装置は、測距のための対象領域を広く取ってオートフォーカスを高精度に遂行できる。
【0004】
また、デジタルスチルカメラやデジタルビデオカメラ等の撮像装置では、撮像対象となる被写体を追跡するいわゆるトラッキング技術が従来から用いられている。例えば、撮像された画像データの色情報を利用するトラッキング技術では、撮像装置は、まず、撮像された画像データのフレーム内の追跡領域の色パターンを特定する。次にその追跡領域の特定されたフレームの次のフレームに関し、前フレームの追跡領域の座標近傍の領域の色パターンを特定し、特定された両フレームの色パターンを比較する。そして、追跡領域と色が類似すると見なした領域を、次フレームにおける新たな追跡領域と見なす。以降、撮像装置は、フレーム毎に同様の処理を繰り返しつつ、追跡領域の画像の情報(輝度、位置等)に基づいた制御を行う。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−76786号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、例えば、猫や犬等のペットを撮像する場合も、その顔に対して顔検出技術を用いることで、上述したオートフォーカスや自動露出等の制御を行うことができる。しかし、特許文献1の技術を用いても、ペットは顔に対する胴体の位置や胴体の形状が特定し難く胴体を検出することが難しい。さらに、撮像者がペットを、顔が撮像装置に向いた状態に維持させることは容易ではなく、ペットを撮像して得られた画像データから所定領域を特定して、その特定された領域を使用してオートフォーカスや自動露出等の制御を実施することは困難であった。
【0007】
ここで、上述したトラッキング技術を顔検出技術と併用すれば、ある被写体が顔検出された後、顔を撮像装置から背けられて顔をロストして(見失って)しまっても、撮像装置は、その被写体を色パターンによって追跡し続け、制御を遂行することができる。一方、このような処理を経て追跡されている被写体が、再度、撮像装置の方へ顔を向けると、新たに顔が検出される。このとき、撮像装置は、同一の被写体であるはずの、検出された顔と、追跡し続けていた被写体とを、別の被写体として認識してしまう。この場合、本来、検出された顔の情報も参照すべきところ、追跡領域の情報のみを参照してしまい、適切な制御が行われないおそれがある。
【0008】
そこで、本発明は、このような課題に鑑み、被写体検出による被写体領域とトラッキングによる追跡領域とを適切に併用して撮像に係る各種の制御を遂行可能な撮像装置、撮像方法およびプログラムを提供することを目的としている。
【課題を解決するための手段】
【0009】
上記課題を解決するために、本発明の、被写体を撮像し画像データを生成する撮像部を備えた撮像装置は、生成された画像データについて、被写体領域を特定する被写体検出部と、生成された画像データについて、追跡対象である追跡領域を特定するトラッキング部と、特定された追跡領域から所定距離内に、特定された被写体領域が含まれるか否かを判断する距離判断部と、特定された被写体領域が所定距離内に含まれる場合、特定された追跡領域に関する情報に被写体領域に関する情報を統合する領域統合部と、領域統合部によって被写体領域に関する情報が追跡領域の情報に統合されると、その被写体領域を使用して撮像の制御を行う制御部と、を備えることを特徴とする。
【0010】
領域統合部によって被写体領域に関する情報が追跡領域の情報に統合されると、制御部はその被写体領域を対象としてオートフォーカスまたは自動露出の制御を行ってもよい。
【0011】
画像データに基づく画像を表示する表示部をさらに備え、領域統合部によって被写体領域に関する情報が追跡領域の情報に統合されると、制御部はその被写体領域のみに指標を重畳して表示部に表示させる制御をさらに行ってもよい。
【0012】
距離判断部は、特定された被写体領域の大きさを導出し、所定距離を、被写体領域の大きさに比例して設定してもよい。
【0013】
上記課題を解決するために、本発明の撮像方法は、被写体を撮像し画像データを生成し、生成した画像データについて、被写体領域を特定し、生成した画像データについて、追跡対象である追跡領域を特定し、特定した追跡領域から所定距離内に、特定した被写体領域が含まれるか否かを判断し、特定した被写体領域が所定距離内に含まれる場合、特定した追跡領域に関する情報に被写体領域に関する情報を統合し、特定した被写体領域に関する情報に被写体領域に関する情報が統合されると、その被写体領域を使用して撮像の制御を行うことを特徴とする。
【0014】
上記課題を解決するために、本発明のプログラムは、被写体が撮像されることで生成された画像データを処理するコンピュータを、生成された画像データについて、被写体領域を特定する被写体検出部と、生成された画像データについて、追跡対象である追跡領域を特定するトラッキング部と、特定された追跡領域から所定距離内に、特定された被写体領域が含まれるか否かを判断する距離判断部と、特定された被写体領域が所定距離内に含まれる場合、特定された追跡領域に関する情報に被写体領域に関する情報を統合する領域統合部と、領域統合部によって被写体領域に関する情報が追跡領域の情報に統合されると、その被写体領域を使用して撮像の制御を行う制御部と、して機能させる。
【発明の効果】
【0015】
本発明によれば、被写体検出による被写体領域とトラッキングによる追跡領域とを適切に併用して撮像に係る各種の制御を遂行することが可能となる。
【図面の簡単な説明】
【0016】
【図1】撮像装置の概略的な機能を示した機能ブロック図である。
【図2】撮像装置の一例を示した外観図である。
【図3】領域統合処理を説明するための説明図である。
【図4】領域統合処理を説明するための説明図である。
【図5】撮像方法の全体的な流れを示したフローチャートである。
【発明を実施するための形態】
【0017】
以下に添付図面を参照しながら、本発明の好適な実施形態について詳細に説明する。かかる実施形態に示す寸法、材料、その他具体的な数値などは、発明の理解を容易とするための例示にすぎず、特に断る場合を除き、本発明を限定するものではない。なお、本明細書及び図面において、実質的に同一の機能、構成を有する要素については、同一の符号を付することにより重複説明を省略し、また本発明に直接関係のない要素は図示を省略する。
【0018】
本実施形態の撮像装置100は、被写体検出とトラッキングとを併用した場合に、被写体検出とトラッキングとで、同一の被写体の画像データに対して複数の領域を特定してしまった場合に、オートフォーカスや自動露出等、あるいは画像データに対する指標の重畳といった撮像に係る各種制御を適切に行うことができる。以下、このような撮像装置100について詳述する。
【0019】
(撮像装置100)
図1は、撮像装置100の概略的な機能を示した機能ブロック図であり、図2は、撮像装置100の一例を示した外観図である。撮像装置100は、表示部120と、操作部122と、撮像部124と、データ処理部126と、画像記憶部128と、画像処理部130と、記録・再生I/F部132と、画像出力部134と、メイン記憶部136と、中央制御部138とを含んで構成される。なお、操作部122と、データ処理部126、画像記憶部128、画像処理部130、記録・再生I/F部132、画像出力部134、メイン記憶部136、中央制御部138、および後述する駆動制御部154はシステムバス140を介して接続されている。
【0020】
表示部120は、液晶ディスプレイ、有機EL(Electro Luminescence)ディスプレイ等で構成され、表示用画像データ(ビュー画像データ)に基づく画像を表示する(以下、単に「表示用画像データを表示する」と表現する)。撮像者は表示部120に表示された表示用画像を参照し、撮像された画像データを確認することができ、被写体を所望する位置および大きさで捉えることが可能となる。
【0021】
また、表示部120の表面には、操作部122の一部であるタッチセンサが配置され、撮像者がタッチした位置情報は、操作部122の出力として中央制御部138に入力される。
【0022】
操作部122は、タッチセンサ、レリーズスイッチを含む操作キー、十字キー、ジョイスティック等で構成され、撮像者からの撮像モードの切り換え等の操作入力を受け付ける。この撮像モードには、例えば、野外、屋内、夜景といった環境に適応させるためのモードの他、検出した人の顔を優先的に処理対象としてAF(自動焦点)やAE(自動露出)制御を行う「人顔優先AF&AE」、撮像者のタッチセンサへのタッチ位置を優先的に処理対象としてAFやAE制御を行う「タッチ追尾AF&AE」、検出したペットの顔を優先的に処理対象としてAFやAE制御を行う「ペット顔優先AF&AE」等のAF&AEの優先順位を定めたモードが含まれる。
【0023】
撮像部124は、撮像レンズ124aを通じて被写体を撮像し画像データを生成する。撮像部124は、具体的に、近赤外光を遮るIRカットフィルタ140、ズーム機能を実現するためのズームレンズ142、焦点調整に用いられるフォーカスレンズ144、露光調整に用いられる絞り146、撮像レンズ124aを通じて入射する被写体像等の光を光電変換し画像信号を生成するCCD(Charge Coupled Devices)等で構成される撮像素子(撮像回路)148、撮像素子148からの画像信号を増幅する増幅器150、増幅された画像信号をデジタルデータである画像データに変換するA/D変換器152、ズームレンズ142、フォーカスレンズ144および絞り146の駆動を制御する駆動制御部154とその駆動回路156とを含んで構成される。
【0024】
データ処理部126は、入力された画像データに対して輝度データや色差データを形成する等の処理を行い、画像記憶部128に伝達する。また、データ処理部126は、画像データの平均輝度を導出し中央制御部138へ出力する。
【0025】
画像記憶部128は、SDRAM(Synchronous-DRAM)等のバッファメモリで構成され、画像データを一時的に記憶する。画像記憶部128に記憶された画像データは、画像処理部130、中央制御部138等に参照される。
【0026】
画像処理部130は、画像記憶部128から画像データを取得し、MPEG−2、MPEG−4、またはMPEG−4/AVC等の形式で符号化処理を施して記録用のデータである記録データを生成する。また、画像処理部130は、後述する表示制御部182の制御信号に応じ画像記憶部128から取得した画像データを縮小し表示用画像データを生成し、表示部120に出力する。一方、後述する任意の記録媒体160に記録された記録データを再生する場合、画像処理部130は記録データを復号する処理を実行する。
【0027】
記録・再生I/F部132は、画像処理部130が生成した記録データ(データストリーム)を任意の記録媒体160に記録する。任意の記録媒体160としては、DVDやBDといった電源不要な媒体や、RAM、EEPROM、不揮発性RAM、フラッシュメモリ、HDD等の電源を要する媒体を適用することができる。また、記録・再生I/F部132は、任意の記録媒体160から記録データを読み出し、画像処理部130に出力する。
【0028】
画像出力部134は、画像記憶部128および画像処理部130からの画像データを、例えば、液晶表示装置、プロジェクタ等の外部装置162に出力する。
【0029】
メイン記憶部136は、SDRAM等のバッファメモリで構成され、中央制御部138で処理されるプログラム等を記憶する。またメイン記憶部136は、後述する被写体検出処理およびトラッキング処理に用いる画像データを記憶する。
【0030】
ただし、トラッキング処理が開始されている場合、画像記憶部128に記憶された画像データは、メイン記憶部136の第1領域、第2領域に転送される。そして、被写体検出処理では第1領域に記憶された画像データが、トラッキング処理では第2領域に記憶された画像データがそれぞれ用いられる。
【0031】
ここで、同じ画像データを第1領域と第2領域それぞれに記憶させるのは、被写体検出処理の方がトラッキング処理よりも時間がかかるためである。例えば、被写体検出処理は5フレーム期間程度の時間がかかるのに対し、トラッキング処理は1フレーム期間内で終了する。したがって、被写体検出処理では5フレーム毎に1度画像データが記憶される。被写体検出処理とトラッキング処理とにかかる時間がいずれも1フレーム期間内で終了する場合、メイン記憶部136の第1領域と第2領域それぞれに記憶させずともよい。
【0032】
中央制御部138は、中央処理装置(CPU)、プログラム等が記憶されたROM、ワークエリアとしてのRAM等を含む半導体集積回路により撮像装置100全体を管理および制御し、撮像等に必要となる各種演算を実行する。また、中央制御部138は、被写体検出部170、色分布抽出部172、トラッキング部174、距離判断部176、領域統合部178、撮像制御部180、表示制御部182、としても機能する。
【0033】
被写体検出部170は、メイン記憶部136の第1領域に記憶されている画像データについて、輝度データから被写体(例えば、人やペットの顔、顔以外の部位)を検出する。本実施形態においては、被写体検出部170は、被写体として、猫や犬などのペットの顔を検出する例を挙げる。
【0034】
ここでは、被写体検出部170は、例えば、顔全体の輪郭に対応した基準テンプレートを用いたテンプレートマッチングによって顔を検出することとする。しかし、被写体検出部170は、顔の構成要素(目、鼻、耳等)に基づくテンプレートマッチングや、特開2010−2960号公報に示されるように、Adaboostアルゴリズムによって生成される複数の識別器をカスケード接続して用いる技術等、既存のどのような顔検出技術を用いてもよい。いずれにしても、被写体検出部170は、検出した顔の位置、大きさ、傾き等を示す顔情報を特定し、メイン記憶部136に記憶させる。
【0035】
色分布抽出部172は、メイン記憶部136の第1領域に記憶されている画像データのうち、顔中心位置およびその周辺領域の輝度データと色差データとをRGBデータに変換し、色分布を求める。本実施形態において、周辺領域の外縁は、例えば、水平方向11画素、垂直方向11画素からなる矩形領域とするが、周辺領域の形状は、矩形に限定されず、多角形であってもよいし円形であってもよいし、その他、どのような形状、大きさであってもよい。
【0036】
本実施形態において、色分布は、色ヒストグラムで示される。色ヒストグラムは、以下のように導出される。すなわち、対象となる画像データのそれぞれの画素が、RGBの色空間を各軸(R軸、G軸、B軸)に垂直にN分割(例えば、N=16)したときの分割された各空間が示す色の範囲のいずれに含まれるかが判断される。そして、色ヒストグラムは、それぞれの色の範囲に含まれる画素の数が計数され、色の範囲とその色の範囲に含まれる画素の数とを対応付けて導出される。ただし、Nは予め定められた自然数とする。また、色ヒストグラムは、各軸に垂直な分割数を、軸毎に異ならせて導出されてもよい。
【0037】
また、色分布抽出部172は、画像データを、RGBデータの代わりにHSV(Hue Saturation Value)データに変換して色分布を求めてもよい。この場合、色ヒストグラムは、HSVの色空間で各軸(H軸、S軸、V軸)に垂直にN分割したときの分割された各空間が示す色の範囲についてRGBデータと同様に導出される。
【0038】
そして、色分布抽出部172は、導出した色分布の情報(色ヒストグラムおよび色ヒストグラムの導出元の画像データの位置情報)を、導出元の被写体領域に関連付けてメイン記憶部136に記憶させる。
【0039】
トラッキング部174は、メイン記憶部136の第2領域に記憶されている画像データについて、色ヒストグラムの比較によって、追跡対象である追跡領域を特定する。
【0040】
具体的には、トラッキング部174は、まず、メイン記憶部136に記憶された色分布の情報を読み出す。そして、トラッキング部174は、読み出した色分布の情報に含まれる位置近傍の比較領域の画像データから色ヒストグラムを導出する。
【0041】
その後、トラッキング部174は、導出した色ヒストグラムと、読み出した色分布の情報に含まれる色ヒストグラムとのヒストグラムインターセクションを導出する。
【0042】
ここで、ヒストグラムインターセクションは、2つの色ヒストグラムについて、同じ色の範囲の画素数を比較し、少ない方の画素数のみを抽出し、すべての色の範囲について抽出された画素数の総和を取ったものである。比較する画像データの色分布が類似しているほど、ヒストグラムインターセクションの値は大きくなる。
【0043】
次に、トラッキング部174は、所定範囲内で、水平方向や垂直方向に1画素ずつ、比較領域を移動し、各位置におけるヒストグラムインターセクションを導出する。そして、トラッキング部174は、最もヒストグラムインターセクションの値が大きい位置に被写体が移動したものと見なし、その位置情報をメイン記憶部136に記憶させる。
【0044】
色ヒストグラムの比較によって追跡領域を特定する構成により、トラッキング部174は、被写体の形状が変化して特定し難い、例えば、ペットの胴体等も追跡可能となる。
【0045】
ただし、トラッキング処理としては、色ヒストグラムを用いたヒストグラムインターセクションに限らず、色分布の特徴量の類似度を比較する既存のどのような技術を用いてもよい。あるいは、単色の色の類似度を比較する技術であってもよいし、色情報と形状情報等を組み合わせた技術を用いてもよい。
【0046】
距離判断部176は、トラッキング部174が特定した追跡領域から所定距離内に、被写体検出部170が特定した被写体領域が含まれるか否かを判断する。ここで、追跡領域と被写体領域との距離は、画像データにおけるそれぞれの領域の位置から導出される。例えば、画像データにおける画面内の左上端から、水平方向Px1画素、垂直方向Py1画素の位置に被写体領域があり、追跡領域が水平方向Px2画素、垂直方向Py2画素の位置にある場合、追跡領域と被写体領域の距離である距離Lは、以下の数式1で導出される。ただし、Px1、Px2、Py1、Py2は整数である。
【数1】
…(数式1)
【0047】
ここで、距離導出の起点となる位置は、追跡領域と被写体領域それぞれにおける中心でもよいし、両領域の距離が最も近い位置でもよい。また、被写体領域側の起点については、顔の中心でもよいし、左右の眼の中心位置でもよい。いずれにしても、予め定められた基準に則って、追跡領域と被写体領域それぞれの起点が定められることとする。
【0048】
領域統合部178は、被写体領域が追跡領域から所定距離内に含まれる場合、追跡領域に関する情報に被写体領域に関する情報を統合する。かかる統合処理については、後に詳述する。
【0049】
撮像制御部180は、撮像の際の制御としてフォーカス制御を遂行する。まず、撮像制御部180は、被写体領域または追跡領域の画像データをメイン記憶部136から読み出す。そして、撮像制御部180は、読み出した画像データを用い、コントラスト法によって自動焦点調整を行う。コントラスト法は、撮像素子148上の像のボケの程度とコントラストの間に相関があり、焦点が合ったときにコントラストが最大となることを利用して焦点合わせを行う技術である。
【0050】
ここでは、コントラストの大きさは、画像データに含まれる高周波成分の割合によって評価される。撮像制御部180は、読み出した画像データのうちの輝度データにBPF(バンドパスフィルタ)をかけて高周波成分を抽出し、抽出された高周波成分の絶対値の積分値を評価値とし、評価値が最大となるようにオートフォーカス演算を行う。そして、撮像制御部180は、演算結果に応じて駆動制御部154に制御信号を出力し、駆動回路156を制御して合焦動作を行わせる。
【0051】
また、撮像制御部180は、撮像の際の制御として露光調整の制御を遂行する。まず、撮像制御部180は、被写体領域または追跡領域の画像データをメイン記憶部136から読み出す。そして、撮像制御部180は、画像データに含まれる輝度データについて平均値を導出し、平均値が所定の範囲に含まれるように、駆動制御部154に制御信号を出力して、絞り146の絞り量を調整させる。
【0052】
表示制御部182は、画像処理部130に表示用画像データを生成させ、表示部120に表示させる。このとき、表示制御部182は、撮像の際の制御として被写体領域および追跡領域を示す指標を重畳する。
【0053】
続いて、上述した撮像装置100による、被写体領域と追跡領域との特定から統合処理、および、その後の制御について詳述する。
【0054】
(領域の特定および統合処理)
図3および図4は、領域統合処理を説明するための説明図である。撮像開始時、図3(a)に示すように、猫Aが撮像装置100側に顔を向けている場合、被写体検出部170は、猫Aの顔を検出し、被写体領域を特定する。この時点では、追跡領域は特定されておらず、距離判断部176や領域統合部178による処理は行われない。
【0055】
表示制御部182は、特定された被写体領域に、顔の大きさに比例して決定される大きさの指標(ここでは、枠190)を、表示用画像データに重畳して表示部120に表示させる。
【0056】
あるフレームXにおいて猫Aの顔に対応する被写体領域を特定した後、数フレームが経過すると、次の被写体特定処理の結果が導出される。次の被写体特定処理の結果、フレームXにおいて特定した被写体領域から所定の距離の範囲内で被写体領域が特定された場合、被写体特定部170は、同じ被写体(猫Aの顔)を追尾していると判断する。
【0057】
一方、次の被写体特定処理の結果、フレームXにおいて特定した被写体領域から所定の距離の範囲内で被写体領域が特定されなかった場合、被写体特定部170は、対象をロストしたと判断する(ロスト判断処理)。ロストは対象を見失うことであり、ここでは、対象は、被写体領域そのもの、または被写体領域に対応した被写体(例えば、猫Aの顔)を示す。
【0058】
そして、所定の契機によって、その契機に対応した被写体についてのトラッキング処理が開始される。ここで、所定の契機は、例えば、枠190に対応する位置のタッチセンサ(操作部122)へのタッチ操作、1つ以上の顔を検出したこと、または、検出された顔が予め登録された顔と同一と判断されたこと等がある。
【0059】
また、タッチセンサの枠190のない位置にタッチ操作があった場合、タッチされた位置を中心とする予め定められた大きさの領域に対応する画像データをトラッキングの対象としてトラッキング処理が開始されてもよい。
【0060】
所定の契機によってトラッキング処理が開始されると、被写体検出部170は、第1領域に記憶された画像データを用いて被写体検出処理を継続する一方、色分布抽出部172およびトラッキング部174は、第2領域に記憶された画像データを用いてトラッキング処理を行う。
【0061】
ただし、トラッキング処理によって特定された追跡領域は、その追跡領域の特定元である被写体領域と、同一の被写体を示すものとして関連付けられる。そして、表示制御部182は、その追跡領域と関連付けられた被写体領域がロストされるまで、追跡領域に指標を重畳せず、撮像制御部180は、オートフォーカスおよび露光調整の処理に追跡領域と関連付けられた被写体領域の画像データを用いる。ただし、被写体領域がロストされるまで、被写体領域と追跡領域とは大凡等しくなる。
【0062】
そして、数フレーム後、図3(b)に示すように、猫Aが撮像装置100から顔を背け、被写体特定部170は被写体領域をロストしたとする。表示制御部182は、追跡領域の特定元である被写体領域をロストしたことを契機に、追跡領域を示す指標である枠192を表示用画像データに重畳して、表示部120に表示させる。このとき、枠192の大きさは、トラッキング処理の対象とした画像データが顔であった場合、その顔の大きさに応じた大きさとする。
【0063】
また、枠192の大きさは、追跡領域内に、ヒストグラムインターセクションの値が予め定められた閾値以上となった比較領域の面積が大きい程、大きく設定されてもよい。
【0064】
続いて、追跡領域を示す指標である枠192が表示されたまま、数フレームが経過した後、猫Aが再び撮像装置100側に顔を向けたとする。このとき、単に、被写体検出部170が検出した猫Aの顔に枠190を重畳した場合、図4(a)に示すように、同一の猫Aについて、2つの指標(枠190、枠192)が重畳されてしまう。
【0065】
そこで、本実施形態では、領域統合処理が行われる。まず、距離判断部176は、追跡領域から所定距離内に被写体領域が含まれるか否かを判断する。図4(a)のように、被写体領域が追跡領域から所定距離内に含まれる場合、距離判断部176は、この追跡領域と被写体領域とは同一の被写体を対象としているものと見なし、追跡領域と被写体領域とを関連付ける。図4(a)に破線の円Sで所定距離の範囲の一例を示す。
【0066】
ただし、距離判断部176は、被写体領域の大きさを導出し、所定距離を、被写体領域の大きさに比例して設定する。本実施形態においては、所定距離は、例えば、被写体領域の大きさの3倍とする。ここで、被写体領域の大きさ(ここでは猫の顔の大きさ)は、例えば、被写体領域の直径とする。ただし、被写体領域の大きさとして、例えば、被写体領域の面積の平方根を用いてもよいし、被写体領域の水平方向や垂直方向の最大幅を用いてもよい。また、ここでは、所定距離は、被写体領域の大きさの3倍としたが、例えば、2倍、4倍、5倍等、被写体の特性に応じた値とすることが望ましい。
【0067】
かかる構成により、距離判断部176は、統合の対象となる被写体領域の選別を、被写体の大きさに応じた判断基準によって高精度に遂行可能となる。
【0068】
また、図4(b)に示すように、同じフレームにおいて、複数の被写体領域(図4(b)において猫Aの顔に重畳された枠190、猫Bの顔に重畳された枠196、猫Cの顔に重畳された枠198で示す)が特定された場合、距離判断部176は、追跡領域に最も近い被写体領域の大きさを導出して、所定距離を、例えば、導出された大きさの3倍に設定する。そして、距離判断部176は、追跡領域から所定距離内にその被写体領域がない場合、次に追跡領域に近い被写体領域について、所定距離の設定および所定距離内にあるか否かの判断を行う。図4(b)に破線の円Sで所定距離の範囲の一例を示す。
【0069】
こうして、距離判断部176は、被写体領域が所定距離内にあると判断されるか、すべての被写体領域が所定距離内にないと判断されるまで、追跡領域から近い被写体領域から順次、判断処理を行う。図4(b)の場合、一番近い被写体領域が、所定距離内にあったものとする。
【0070】
また、被写体検出部170が被写体を検出する範囲を、例えば、追跡領域から予め定められた所定範囲内とすることで、距離判断部176による判断処理の対象となる被写体領域の数を抑制し、処理負荷を低減させてもよい。
【0071】
さらに、距離判断部176は、所定距離を、所定の固定値として設定してもよい。かかる構成により、距離判断部176は、統合の対象となる被写体領域の選別を、低処理負荷で遂行できる。
【0072】
被写体領域が追跡領域から所定距離内に含まれる場合、領域統合部178は、追跡領域に関する情報に被写体領域に関する情報を統合する。所定距離内に含まれない場合、領域統合部178は、特に処理は行わない。
【0073】
ここで、「情報を統合する」とは、例えば、追跡領域の位置情報に、被写体領域の位置情報を上書きすることである。追跡領域の位置情報に、被写体領域の位置情報を上書きすることで、トラッキング部174は、被写体領域の位置からトラッキング処理を再開でき、後に再び被写体領域をロストしても、追跡領域が被写体に近い位置を示し被写体の胴体等を追跡領域として特定できる可能性が高まる。
【0074】
また、「情報を統合する」具体的な処理として、被写体領域と追跡領域との関連付け処理も含む。領域統合部178は、追跡領域から所定距離内にあった被写体領域を、その追跡領域と関連付ける。
【0075】
さらに、「情報を統合する」具体的な処理として、画像データの位置情報を上書きすることに加えて、被写体領域の輝度データや色差データに基づいて、色分布情報を導出しなおすようにしてもよい。かかる構成により、トラッキング部174は、その後のトラッキング処理の精度を向上することができる。
【0076】
そして、表示制御部182は、領域統合部178によって被写体領域に関する情報が追跡領域の情報に統合されると、表示用画像データに対し、追跡領域には指標を重畳せず、追跡領域と関連付けられた被写体領域のみに指標を重畳して表示部120に表示させる。すなわち、図3(c)に示すように、猫Aの顔にのみ、枠194が重畳されることとなる。このとき、枠194の大きさは、検出された被写体領域の大きさに応じたものとする。また、追跡情報として、この枠194の大きさで更新する。
【0077】
図4(b)に示す、同じフレームにおいて、複数の被写体領域が特定された場合も同様に、表示制御部182は、領域統合部178によって被写体領域に関する情報が追跡領域の情報に統合されると、図4(c)に示すように、猫Aについては、顔にのみ、枠194が重畳されることとなる。
【0078】
このように、撮像装置100は、表示部120において、同一の被写体に対して、複数の指標が表示されてしまう事態を回避でき、タッチセンサへのタッチ操作の操作性や表示部120の被写体の視認性を向上することが可能となる。
【0079】
また、撮像制御部180は、領域統合部178によって被写体領域に関する情報が追跡領域の情報に統合されると、追跡領域に関連付けられた被写体領域を対象としてオートフォーカスまたは自動露出の制御を行う。つまり、撮像制御部180は、追跡領域(猫Aの胴体)への情報統合処理の対象となった被写体領域(猫Aの顔)の画像データを参照して、オートフォーカスや自動露出の制御を行う。かかる構成により、撮像制御部180は、被写体の顔に合わせて適切に撮像制御を遂行することが可能となる。
【0080】
領域統合部178による領域統合処理後、トラッキング部174は、情報が統合された追跡領域の画像データの位置情報に示される領域からトラッキング処理を再開する。すなわち、トラッキング部174は、被写体領域およびその近傍を対象としてトラッキング処理を行う。
【0081】
また、図3(d)に示すように、猫Aは撮像装置100から顔を背けたままで、他の猫Bの顔が映り込んだ場合、追跡領域と新たな猫Bの顔に対応する被写体領域とが所定距離より離れていれば、猫Aと猫Bとを異なる被写体として識別可能となるため、表示制御部182は、猫Aの追跡領域を示す枠192と、猫Bの被写体領域を示す枠196とをいずれも表示画像データに重畳して表示部120に表示させる。
【0082】
上述したように、本実施形態の撮像装置100は、所定距離内に含まれる被写体領域と追跡領域を同一の被写体と見なし、それぞれに関する情報を統合する。そのため、例えば、オートフォーカスや自動露出等の撮像制御を適切に遂行でき、また、表示部120に表示する指標を統合することで視認性や操作性を向上可能となる。
【0083】
また、コンピュータを、撮像装置100として機能させるプログラムや当該プログラムを記録した、コンピュータで読み取り可能なフレキシブルディスク、光磁気ディスク、ROM、EPROM、EEPROM、CD、DVD、BD等の記録媒体も提供される。ここで、プログラムは、任意の言語や記述方法にて記述されたデータ処理手段をいう。
【0084】
(撮像方法)
次に、上述した撮像装置100を用いて、被写体を撮像する撮像方法の一連の流れを説明する。図5は、撮像方法の全体的な流れを示したフローチャートである。かかる処理は、被写体特定処理およびトラッキング処理を並行して行う撮像モードにて撮像中、所定のフレーム周期で繰り返し実行される。
【0085】
図5に示すように、撮像部124は、被写体を撮像し1フレームの画像データを生成する(S200)。その画像データは画像記憶部128に記憶される(S202)。
【0086】
中央制御部138は、以前のフレームの画像データについての被写体領域の特定処理が継続中であるか否かを判断する(S204)。継続中である場合(S204におけるYES)、トラッキング処理の判定(S216)に処理を移す。
【0087】
以前のフレームの画像データについての被写体領域の特定処理が終了している場合(S204におけるNO)、色分布抽出部172は、被写体領域が特定されたか否か、すなわち、被写体領域の特定処理において被写体として特定できる画像データがあったか否かを判断する(S206)。特定されなかった場合(S206におけるNO)、ロスト判断処理(S210)に処理を移す。
【0088】
被写体領域が特定された場合(S206におけるYES)、色分布抽出部172は、特定された被写体領域の色分布を導出して、メイン記憶部136に導出元の被写体領域に関連付けて記憶させる(S208)。
【0089】
続いて、被写体特定部170は、ロスト判断処理を行う(S210)。ロスト判断処理は、上述したように、被写体特定処理の結果、あるフレームXにおいて特定された被写体領域について、次の被写体特定処理の結果、所定の距離の範囲内で被写体領域が特定された場合、被写体特定部170は、同じ被写体を追尾していると判断し、特定されなかった場合、被写体特定部170は、対象をロストしたと判断する。
【0090】
そして、中央制御部138は、画像記憶部128に記憶された新たな1フレームの画像データをメイン記憶部136の第1領域に記憶させる(S212)。被写体検出部170は、被写体特定処理を開始する(S214)。
【0091】
そして、中央制御部138は、トラッキング処理が開始しているか否かを判断し(S216)、開始していない場合(S216におけるNO)、中央制御部138は、例えば、タッチセンサへのタッチ操作といった所定の契機が発生したか否かを判断する(S218)。発生していない場合(S218におけるNO)、処理を終了する。
【0092】
所定の契機が発生した場合(S218におけるYES)、トラッキング部174は、トラッキング処理を開始する(S220)。そして、撮像制御処理(S238)に処理を移す。
【0093】
すでにトラッキング処理が開始している場合(S216におけるYES)、中央制御部138は、画像記憶部128に記憶された1フレームの画像データをメイン記憶部136の第2領域に記憶させる(S222)。トラッキング部174は、前フレームから継続したトラッキング処理を行う(S224)。このとき、トラッキング処理によって追跡領域が特定されると、その追跡領域は、追跡領域の特定元である被写体領域と、同一の被写体を示すものとして関連付けられる。
【0094】
続いて、中央制御部138は、ロスト判断処理ステップS210において、追跡領域に関連付けられた被写体領域をロストしたと判断されたか否かを判断する(S226)。ロストしていない場合(S226におけるNO)、中央制御部138は、その被写体領域を、指標の重畳や撮像制御の対象として設定する(S228)。そして、撮像制御処理(S236)に処理を移す。
【0095】
被写体領域をロストしている場合(S226におけるYES)、距離判断部176は、追跡領域から所定距離内に被写体領域が含まれるか否かを判断する(S230)。含まれない場合(S230におけるNO)、中央制御部138は、追跡領域を、指標の重畳や撮像制御の対象として設定する(S232)。そして、撮像制御処理(S236)に処理を移す。
【0096】
追跡領域から所定距離内に被写体領域が含まれる場合(S230におけるYES)、領域統合部178は、被写体領域の位置情報を、追跡領域の位置情報に上書きしたり、追跡領域から所定距離内にあった被写体領域を、その追跡領域と関連付けたりするといった情報統合処理を行う(S234)。
【0097】
そして、設定された制御の対象に対して、撮像制御部180は、オートフォーカスや自動露出の処理を行い(S236)、表示制御部182は、指標の重畳を行った表示用画像データを表示部120に表示させる(S238)。
【0098】
上述した撮像装置100を用いた撮像方法によっても、オートフォーカスや自動露出等の撮像制御を適切に遂行でき、また、表示部120に表示する指標を統合することで視認性や操作性を向上可能となる。
【0099】
以上、添付図面を参照しながら本発明の好適な実施形態について説明したが、本発明はかかる実施形態に限定されないことは言うまでもない。当業者であれば、特許請求の範囲に記載された範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、それらについても当然に本発明の技術的範囲に属するものと了解される。
【0100】
なお、本明細書の撮像方法の各工程は、必ずしもフローチャートとして記載された順序に沿って時系列に処理する必要はなく、並列的あるいはサブルーチンによる処理を含んでもよい。
【産業上の利用可能性】
【0101】
本発明は、被写体を撮像して得られた画像データから特定された所定の領域を使用して撮像に係る各種制御を行う撮像装置、撮像方法およびプログラムに利用することができる。
【符号の説明】
【0102】
100 …撮像装置
120 …表示部
124 …撮像部
170 …被写体検出部
174 …トラッキング部
176 …距離判断部
178 …領域統合部
180 …撮像制御部
182 …表示制御部
【特許請求の範囲】
【請求項1】
被写体を撮像し画像データを生成する撮像部を備えた撮像装置であって、
生成された前記画像データについて、被写体領域を特定する被写体検出部と、
生成された前記画像データについて、追跡対象である追跡領域を特定するトラッキング部と、
特定された前記追跡領域から所定距離内に、特定された前記被写体領域が含まれるか否かを判断する距離判断部と、
前記特定された被写体領域が前記所定距離内に含まれる場合、前記特定された追跡領域に関する情報に前記被写体領域に関する情報を統合する領域統合部と、
前記領域統合部によって前記被写体領域に関する情報が前記追跡領域の情報に統合されると、その被写体領域を使用して撮像の制御を行う制御部と、
を備えることを特徴とする撮像装置。
【請求項2】
前記領域統合部によって前記被写体領域に関する情報が前記追跡領域の情報に統合されると、前記制御部はその被写体領域を対象としてオートフォーカスまたは自動露出の制御を行うことを特徴とする請求項1に記載の撮像装置。
【請求項3】
画像データに基づく画像を表示する表示部をさらに備え、
前記領域統合部によって前記被写体領域に関する情報が前記追跡領域の情報に統合されると、前記制御部はその被写体領域のみに指標を重畳して前記表示部に表示させる制御をさらに行うことを特徴とする請求項1または2に記載の撮像装置。
【請求項4】
前記距離判断部は、前記特定された被写体領域の大きさを導出し、前記所定距離を、前記被写体領域の大きさに比例して設定することを特徴とする請求項1から3のいずれか1項に記載の撮像装置。
【請求項5】
被写体を撮像し画像データを生成し、
生成した前記画像データについて、被写体領域を特定し、
生成した前記画像データについて、追跡対象である追跡領域を特定し、
特定した前記追跡領域から所定距離内に、特定した前記被写体領域が含まれるか否かを判断し、
前記特定した被写体領域が前記所定距離内に含まれる場合、前記特定した追跡領域に関する情報に前記被写体領域に関する情報を統合し、
前記特定した被写体領域に関する情報に前記被写体領域に関する情報が統合されると、その被写体領域を使用して撮像の制御を行うことを特徴とする撮像方法。
【請求項6】
被写体が撮像されることで生成された画像データを処理するコンピュータを、
生成された前記画像データについて、被写体領域を特定する被写体検出部と、
生成された前記画像データについて、追跡対象である追跡領域を特定するトラッキング部と、
特定された前記追跡領域から所定距離内に、特定された前記被写体領域が含まれるか否かを判断する距離判断部と、
前記特定された被写体領域が前記所定距離内に含まれる場合、前記特定された追跡領域に関する情報に前記被写体領域に関する情報を統合する領域統合部と、
前記領域統合部によって前記被写体領域に関する情報が前記追跡領域の情報に統合されると、その被写体領域を使用して撮像の制御を行う制御部と、
して機能させるためのプログラム。
【請求項1】
被写体を撮像し画像データを生成する撮像部を備えた撮像装置であって、
生成された前記画像データについて、被写体領域を特定する被写体検出部と、
生成された前記画像データについて、追跡対象である追跡領域を特定するトラッキング部と、
特定された前記追跡領域から所定距離内に、特定された前記被写体領域が含まれるか否かを判断する距離判断部と、
前記特定された被写体領域が前記所定距離内に含まれる場合、前記特定された追跡領域に関する情報に前記被写体領域に関する情報を統合する領域統合部と、
前記領域統合部によって前記被写体領域に関する情報が前記追跡領域の情報に統合されると、その被写体領域を使用して撮像の制御を行う制御部と、
を備えることを特徴とする撮像装置。
【請求項2】
前記領域統合部によって前記被写体領域に関する情報が前記追跡領域の情報に統合されると、前記制御部はその被写体領域を対象としてオートフォーカスまたは自動露出の制御を行うことを特徴とする請求項1に記載の撮像装置。
【請求項3】
画像データに基づく画像を表示する表示部をさらに備え、
前記領域統合部によって前記被写体領域に関する情報が前記追跡領域の情報に統合されると、前記制御部はその被写体領域のみに指標を重畳して前記表示部に表示させる制御をさらに行うことを特徴とする請求項1または2に記載の撮像装置。
【請求項4】
前記距離判断部は、前記特定された被写体領域の大きさを導出し、前記所定距離を、前記被写体領域の大きさに比例して設定することを特徴とする請求項1から3のいずれか1項に記載の撮像装置。
【請求項5】
被写体を撮像し画像データを生成し、
生成した前記画像データについて、被写体領域を特定し、
生成した前記画像データについて、追跡対象である追跡領域を特定し、
特定した前記追跡領域から所定距離内に、特定した前記被写体領域が含まれるか否かを判断し、
前記特定した被写体領域が前記所定距離内に含まれる場合、前記特定した追跡領域に関する情報に前記被写体領域に関する情報を統合し、
前記特定した被写体領域に関する情報に前記被写体領域に関する情報が統合されると、その被写体領域を使用して撮像の制御を行うことを特徴とする撮像方法。
【請求項6】
被写体が撮像されることで生成された画像データを処理するコンピュータを、
生成された前記画像データについて、被写体領域を特定する被写体検出部と、
生成された前記画像データについて、追跡対象である追跡領域を特定するトラッキング部と、
特定された前記追跡領域から所定距離内に、特定された前記被写体領域が含まれるか否かを判断する距離判断部と、
前記特定された被写体領域が前記所定距離内に含まれる場合、前記特定された追跡領域に関する情報に前記被写体領域に関する情報を統合する領域統合部と、
前記領域統合部によって前記被写体領域に関する情報が前記追跡領域の情報に統合されると、その被写体領域を使用して撮像の制御を行う制御部と、
して機能させるためのプログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−98746(P2013−98746A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−239660(P2011−239660)
【出願日】平成23年10月31日(2011.10.31)
【出願人】(308036402)株式会社JVCケンウッド (1,152)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年10月31日(2011.10.31)
【出願人】(308036402)株式会社JVCケンウッド (1,152)
【Fターム(参考)】
[ Back to top ]