
撮像装置、撮像装置の作動方法及び内視鏡装置
【課題】通信状態が切り替わった場合でも、転送したデータの続きからデータ転送が行われる撮像装置、撮像方法及び内視鏡装置を提供すること。
【解決手段】ヘッド部と、ヘッド部から送信される画像信号を処理する本体部とが分離したヘッド分離型の撮像装置であって、ヘッド部は、画像信号および又は補正データを符号化し、本体部は、ヘッド部と無線通信を確立し、受信した符号化された画像信号および又は補正データを復号する。
【解決手段】ヘッド部と、ヘッド部から送信される画像信号を処理する本体部とが分離したヘッド分離型の撮像装置であって、ヘッド部は、画像信号および又は補正データを符号化し、本体部は、ヘッド部と無線通信を確立し、受信した符号化された画像信号および又は補正データを復号する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、被写体を撮像するヘッド部と、ヘッド部から送信される画像信号を処理する本体部とが分離したヘッド分離型の撮像装置、撮像方法及び内視鏡装置に関する。
【背景技術】
【0002】
従来の撮像装置には、被写体を撮像するイメージセンサ(例えば、CCD(Charge Coupled Device)センサやCMOS(Complementary Metal Oxide Semiconductor)センサ等)を備えたカメラ装置(ヘッド部)がホスト装置(本体部)に着脱可能に装着され、カメラ装置をホスト装置から外した状態で使用する場合は、カメラ装置で撮像される画像の画像信号を無線通信によりホスト装置へ送信し、カメラ装置をホスト装置に装着した状態で使用する場合は、カメラ装置で撮像される画像の画像信号を有線通信によりホスト装置へ送信するものがある(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−28740号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の撮像装置には、イメージセンサで撮像される画像の画像信号を補正する補正データをヘッド部に記憶するものがある。このような撮像装置では、装置の起動後に補正データをヘッド部から本体部に転送するが、この転送中にデータ通信が有線から無線、もしくは無線から有線に切り替わると、補正データの転送を初めからやり直していた。このため、補正データの送信中に通信が切り替わると、一度転送した補正データを再度転送し直す必要があり、利用者の利便性が低くなるという問題があった。
本発明は、かかる従来の課題を解決するためになされたものであり、通信状態が切り替わった場合でも、転送したデータの続きからデータ転送が行われる撮像装置、撮像方法及び内視鏡装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の実施形態に係る撮像装置は、ヘッド部と、ヘッド部から送信される画像信号を処理する本体部とが分離したヘッド分離型の撮像装置であって、ヘッド部は、充電池を具備し、本体部は、ヘッド部の充電池を充電するための端子を具備し、ヘッド部が端子へ接続されたことを検出すると、ヘッド部と有線通信によりデータの送受信を行う。
【図面の簡単な説明】
【0006】
【図1】第1の実施形態に係る内視鏡装置の構成図である。
【図2】ヘッドの構成図である。
【図3】補正データの説明図である。
【図4】補正方法の説明図である。
【図5】CCUの構成図である。
【図6】内視鏡装置の動作を示すフローチャートである。
【図7】第2の実施形態に係る内視鏡装置の構成図である。
【図8】ヘッドの構成図である。
【図9】CCUの構成図である。
【図10】第3の実施形態に係る内視鏡装置の構成図である。
【図11】ヘッドの構成図である。
【図12】CCUの構成図である。
【図13】内視鏡装置の動作を示すフローチャートである。
【発明を実施するための形態】
【0007】
以下、図面を参照して、本発明の実施形態を詳細に説明する。
(第1の実施形態)
第1の実施形態では、撮像装置としてヘッド分離型の内視鏡装置を例にその構成を説明する。また、イメージセンサ(撮像素子)としてCMOS(Complementary Metal Oxide Semiconductor)センサを用いた実施形態について説明するが、CMOSセンサの代わりにCCD(Charge Coupled Device)センサ等、他のセンサを用いてもよい。
【0008】
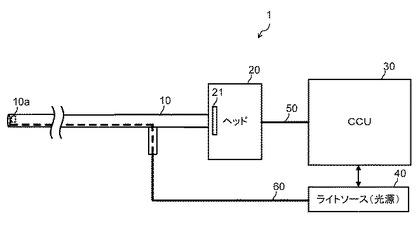
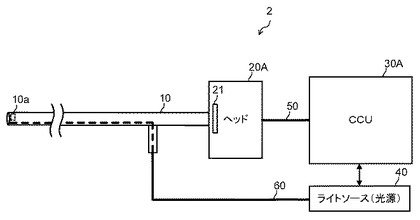
図1は、第1の実施形態に係る内視鏡装置1の構成図である。内視鏡装置1は、先端に対物レンズ10aが設けられ、被検査体内へ挿入されるスコープ10と、対物レンズ10aの結像面に位置するイメージセンサ21(撮像手段)により撮像される画像信号を無線通信または有線通信により送信するヘッド20と、ヘッド20から送信される画像信号を処理するCCU(camera control unit)30と、撮像範囲を露光するライトソース40(光源)と、ライトソース40からの光をスコープ10の先端部へ導入するための光ファイバ60を備える。なお、スコープ10はヘッド20へ着脱可能に取り付けられる。カメラケーブル50は、ヘッド20とCCU30とが有線通信するためのケーブルであり、補正データ、画像信号、制御信号等を送受信するための信号線が収容されている。
【0009】
(ヘッド20の構成)
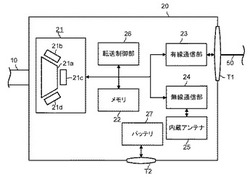
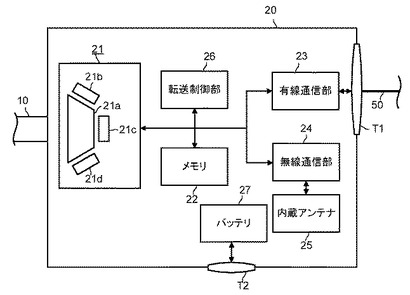
図2は、ヘッド20の構成図である。
ヘッド20は、イメージセンサ21、メモリ22、有線通信部23、無線通信部24、内蔵アンテナ25、バッテリ27、接続端子T1、充電端子T2を備える。イメージセンサ21は、三板式イメージセンサであり、対物レンズ10aからの光をR(Red),G(Green),B(Blue)の三色に色分解するプリズム21aと、このR,G,B色分解された光を電気信号に変換するCMOSセンサ21b〜21dから構成される。三板式イメージセンサは、1画素ごとにRGBの情報を保持するので色再現性に優れるという特性を有する。イメージセンサ21は、フルHD(high definition)に対応したカラーイメージセンサである。
【0010】
イメージセンサ21は、三板式ではなく単板式としてもよい。単板式のイメージセンサでは、CMOSセンサの各画素上に色フィルタを備え、CMOSセンサから出力される電気信号を回路にてR,G,B信号に色分解する。プリズムとCMOSセンサを貼り合わせる必要がないため安価に制作できるという特性を有する。なお、色フィルタの配列には、例えば、色差線順次配列やベイヤー配列等があるが、この第1の実施形態では、色差線順次配列やベイヤー配列に限らず種々の配列方式を使用することができる。
【0011】
メモリ22は、電気的に書き換え可能な不揮発性メモリ(例えば、フラッシュメモリ等)であり、イメージセンサ21の補正データ(補正情報)や設定条件(例えば、フレームレート、ゲイン、感度等)、ID(識別子)等が記憶される。なお、これらの補正データおよび設定条件等を記憶するメモリは、書き換えが可能であれば、フラッシュメモリ以外のメモリを使用してもよい。
【0012】
(補正データ)
イメージセンサ21には、固定パタンノイズ(FPN)とランダムノイズと呼ばれる2種類のノイズが存在するが、第1の実施形態では、ヘッド20に固定パタンノイズの補正データ(補正情報)をメモリ22へ記憶しておく。この補正データは、内視鏡装置1を起動した際に、ヘッド20からCCU30へ転送され、この転送された補正データを用いてイメージセンサ21から送信される画像信号が補正される。
【0013】
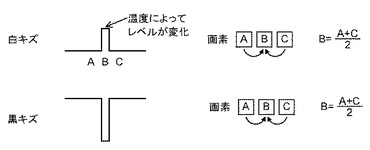
固定パタンノイズには、外部環境(例えば、温度や輝度)によってレベル(強度)が変化しない素地ノイズと、外部環境によりレベルが変化する欠陥ノイズ(例えば、白キズや黒キズ)がある。このメモリ22には、この2種類のノイズの補正データが記憶されている。以下、各素地ノイズおよび欠陥ノイズの補正データについて説明する。
【0014】
(素地ノイズの補正データ)
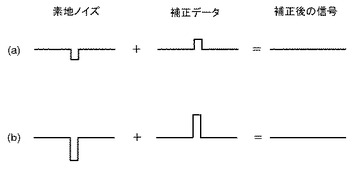
図3は、素地ノイズの補正データの説明図である。
素地ノイズは、外部環境によらず常に一定のノイズを生ずる。このため、イメージセンサ21が備えるCMOSセンサの素地ノイズを画素毎に予め測定しておき、図3に示すように、この素地ノイズを打ち消す補正データを画素毎にメモリ22に記憶しておく。この素地ノイズの補正データは、画素のアドレス順にメモリ22に記憶される。
【0015】
(欠陥画素の補正データ)
欠陥ノイズである白キズとは、本来出力されるべき値よりも高い値の画素データが出力されて、その受光素子に対応する画素が白く見える画素欠陥のことをいい、主に暗電流により生じる。暗電流とは、CMOSセンサにおいて、光を照射しない時にも流れている微弱な電流のことであり、主に熱的要因や絶縁不良のために生じる。暗電流が大きいと画像のノイズの原因となる。
【0016】
また、欠陥ノイズである黒キズとは、本来出力されるべき値よりも低い値の画素データが出力されて、その受光素子に対応する画素が黒く見える画素欠陥のことをいい、主にCMOSセンサ内のダストが原因で生じる。このダストにより、CMOSセンサへの画素へ入射する光が遮られたり、CMOSセンサの回路がショートしている場合に生じる欠陥である。
【0017】
イメージセンサ21が備えるCMOSセンサの全画素のうち白キズおよび黒キズ等の画素欠陥が生じているアドレスが欠陥画素の補正データとしてメモリ22に記憶される。図4は、欠陥画素の補正方法の説明図である。図4に示すように、欠陥画素の補正は、欠陥画素の左右両隣の画素の画像信号を足して2で除算した値を欠陥画素の画像信号とし、欠陥画素の画像信号を補正する。
【0018】
以上のように、メモリ22には、補正データとして以下の情報が同順で記憶されている。また、このメモリ22に記憶されている補正データを読み出す際は、同順(1→2→3)で読み出される。
1:補正データ数。
2:素地ノイズの補正データ(複数個)。
3:欠陥画素の補正データ(複数個)。
【0019】
なお、素地ノイズの補正データは、イメージセンサ21のCMOSセンサの各画素の補正データがアドレスと共に画素のアドレス順に記憶され、欠陥画素の補正データは、欠陥画素のアドレスが画素のアドレス順に記憶されている。
【0020】
有線通信部23は、シリアライザ及びLVDS(low voltage differential signaling)変換回路等を備え、メモリ22に記憶されている補正データやイメージセンサ21から出力される画像信号を接続端子T1に接続されたカメラケーブル50を介してCCU30へ送信する。また、後述するCCU30から送信される初期化データ(例えば、解像度、クロック、モード等)を受信する。なお、画像信号は、デジタル信号のままCCU30へ送信される。
【0021】
無線通信部24は、メモリ22に記憶されている補正データやイメージセンサ21から出力される画像信号を、内蔵アンテナ25を介してCCU30へ送信する。また、後述するCCU30から送信される初期化データを受信する。なお、無線通信には、例えば、IEEE802.11a/b/g/nやWirelessHDで規定される方式を利用すればよい。
【0022】
転送制御部26は、CCU30からの指示に基づいて、補正データおよび画素信号等のデータをCCU30へ転送する。
【0023】
バッテリ27は、ヘッド20が備える各回路(イメージセンサ21、メモリ22、有線通信部23、無線通信部24、内蔵アンテナ25、転送制御部26等)へ電力を供給する電源である。バッテリ27は、充電端子T2に接続された外部電源(例えば、コンセント)により充電される。なお、カメラケーブル50内にヘッド20へ電力を供給するための電力線を収容し、このカメラケーブル50を介して供給される電力によりバッテリ27を充電してもよい。
【0024】
(CCU30の構成)
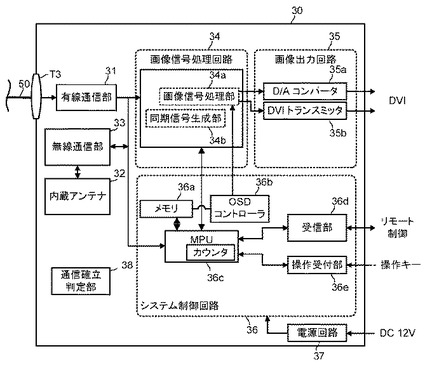
図5は、CCU30の構成を示す図である。
接続端子T3、有線通信部31、内蔵アンテナ32、無線通信部33、画像信号処理回路34、画像出力回路35、システム制御回路36、電源回路37及び通信確立判定部38を備える。接続端子T3には、カメラケーブル50が接続される。
【0025】
有線通信部31は、図示しないデシリアライザ及びLVDS変換回路を備える。有線通信部31は、CCU30の電源が投入されると、ヘッド20の有線通信部23との通信の確立を開始し、通信が確立するとヘッド20からカメラケーブル50を介して送信される補正信号をシステム制御回路36へ、画像信号を画像信号処理回路34へ出力する。また、有線通信部31は、システム制御回路36から出力される制御信号や後述する初期化データを接続端子T3に接続されたカメラケーブル50を介してヘッド20へ送信する。
【0026】
無線通信部33は、CCU30の電源が投入されると、ヘッド20の無線通信部24との通信の確立を開始し、通信が確立すると内蔵アンテナ32で受信する補正信号をシステム制御回路36へ、画像信号を画像信号処理回路34へ出力する。また、無線通信部33は、システム制御回路36から出力される制御信号や初期化データを、内蔵アンテナ32を介してヘッド20へ送信する。なお、無線通信部33は、無線通信が確立するとヘッド20の無線通信部24へ定期的に信号を送信し、無線通信部24と無線通信が確立状態を維持する。
【0027】
画像信号処理回路34は、画像信号処理部34aと同期信号生成部34bを備える。画像信号処理部34aは、有線通信部31から出力される画像信号を処理して画像出力回路35へ出力する。画像信号処理部34aは、有線通信部31から出力される画像信号を画素のアドレス順に並べ替えた後、後述するMPU36cによりヘッド20のメモリ22から読出されてメモリ36aへ記憶された補正データに基づいて画像信号を補正する。
【0028】
(素地ノイズの補正)
画像信号処理部34aは、画像信号をアドレス順に並べ替えた後、同一のアドレスを有する画像信号にメモリ36aに記憶された補正データを加算することで画像信号を補正する。MPU36cによりメモリ36aに記憶された補正データは、イメージセンサ21が備えるCMOSセンサの素地ノイズを打ち消すように作成されているため、同一アドレスの画像信号に補正データを加算することで画像信号を補正することができる。
【0029】
(欠陥画素ノイズの補正)
画像信号処理部34aは、メモリ36aに記憶された欠陥画素のアドレスから欠陥画素の画像信号を認識し、この欠陥画素の左右両隣の画素の画像信号を足して2で除算した値を欠陥画素の画像信号とする。欠陥画素の画像信号を補正する。
【0030】
画像信号処理部34aは、補正後の画像信号に対してデモザイキング処理、ニー補正、ガンマ補正、ディテールやマトリクス処理等のエンハンス処理が行い、画像出力回路35へ入力する。
【0031】
同期信号生成部34bは、イメージセンサ21の撮像に用いられる同期信号を生成する。該同期信号は、設定されたフレームレートに応じた所定の間隔で生成される。生成された同期信号は、MPU36cへ出力されると共に、有線通信部31または無線通信部33からヘッド20へ送信される。
【0032】
画像出力回路35は、D/Aコンバータ35a及びDVI(digital visual interface)トランスミッタ35bを備え、画像信号処理回路34で処理された画像信号をアナログ及びデジタルのRGB(red, green, blue)信号として外部のモニタ(図示せず)へ出力する。なお、DVIトランスミッタ35bの代わりに、HD−SDI(high definition serial digital interface)トランスミッタやHD−DVI(high definition digital visual interface)を備えるようにしてもよい。
【0033】
システム制御回路36は、メモリ36a、OSD(on-screen display)コントローラ36b、MPU(micro processing unit)36c、受信部36d及び操作受付部36eを備え、この内視鏡装置1全体を制御する。メモリ36aは、電気的に書き換え可能なEEPROMである。このメモリ36aには、CCU30の設定条件(例えば、露光期間やゲイン等)やヘッド20の初期化データ、初期化データのデータ数(以下、初期化データ数と称する)が記憶されている。
【0034】
露光期間は、イメージセンサ21で撮像される画像の明るさを調整するパラメータであり、シャッタースピードに相当する。露光期間としては、数種類(例えば、1/240秒、1/120秒等)あればよい。この露光期間は、後述する外部のPC(personal computer)や操作キーにより設定を変更できる。
【0035】
この設定条件を記憶するメモリは、書き換えが可能であれば、EEPROM以外のメモリも使用できる。OSDコントローラ36bは、画像信号処理部34aで処理される画像信号の画像にテキストデータやビットマップ等を重畳表示する。
【0036】
MPU36cは、受信部36dで受信したリモート制御信、操作受付部で受付けた処理内容及びメモリ36aに記憶された設定情報に基づいてヘッド20、CCU30及びライトソース40を制御する。
【0037】
(補正データの転送)
また、MPU36cは、有線通信で送信するか無線通信で送信するかを指定して、ヘッド20のメモリ22に記憶されているIDおよび補正データを送信するようヘッド20の転送制御部26へ指示する。MPU36cは、ヘッド20の転送制御部26から送信されるIDおよび補正データをメモリ36aへ記憶する。
【0038】
初めに、MPU36cは、ヘッド20のメモリ22に記憶されているIDを送信するように転送制御部26へ指示し、送信されるIDをメモリ36aへ記憶する。次に、MPU36cは、ヘッド20のメモリ22に記憶されている補正データ数を送信するように転送制御部26へ指示し、送信される補正データ数をメモリ36aへ記憶する。
【0039】
さらに、MPU36cは、ヘッド20のメモリ22から素地ノイズの補正データと画素のアドレスを送信するように転送制御部26へ指示し、送信される素地ノイズの補正データと画素のアドレスをメモリ36aへ記憶する。
【0040】
次に、MPU36cは、ヘッド20のメモリ22から欠陥画素の補正データ(画素のアドレス)を送信するように転送制御部26へ指示し、送信される欠陥画素の補正データをCCU30のメモリ36aへ記憶する。MPU36cは、読みだした画素欠陥ノイズの補正データ(欠陥画素のアドレス)を読み出した順、すなわちアドレス順に記憶する。
【0041】
なお、MPU36cは、送信される補正データをメモリ36aに記憶する度に内蔵カウンタの値をインクリメントし、この内蔵カウンタの値がメモリ36aの補正データ数と同じになった時点で補正データの読出しが終了したと判断し、内蔵カウンタの値をリセットする。
【0042】
(初期化データの転送)
MPU36cは、さらに、メモリ36aに記憶されている初期化データを、有線通信部31もしくは無線通信部33を介してヘッド20へ送信する。送信された初期化データは、転送制御部26によりメモリ22へ記憶される。なお、MPU36cは、初期化データを読み出してヘッド20へ転送する度に内蔵カウンタの値をインクリメントし、この内蔵カウンタの値がメモリ36aに記憶されている初期化データ数と同じになった時点で初期化データの送信が終了したと判断し、内蔵カウンタの値をリセットする。
【0043】
なお、一般的に、有線通信は無線通信に比べて通信速度が速く、通信の安定性が高いため、MPU36cは、無線通信と有線通信の両方が確立している場合、有線通信を優先して使用する。
【0044】
受信部36dは、外部のPC等から送信されるリモート制御用の制御信号を受信してMPU36cへ出力する。なお、外部PCとの通信は、RS232−C用シリアルポートを介して行われる。操作受付部36eは、外部の操作キーで操作された処理を受け付けMPU36cへ出力する。操作受付部36eで受付けられる操作としては、例えば、画像信号の補正を行う/行わないといった操作(補正のON/OFF操作)やゲインの設定値の操作等がある。
【0045】
電源回路37は、外部から供給される電力を所定の電圧に変換してCCU30内の各回路へ供給する。また、上記電力は、接続端子T3に接続されたカメラケーブル50を介してヘッド20にも供給される。
【0046】
通信確立判定部38は、ヘッド20との間で有線通信および無線通信が確立されているどうかを判定する。この通信確立判定部38での通信確立の判定には種々の方法を用いることができる。例えば、この第1の実施形態では、有線通信で画像信号を送信する際にLVDSを使用している。LVDSでは、差動信号により画像信号を伝送しているので、2本の伝送路間の電圧の有無から有線通信部31とヘッド20の有線通信部23との間で有線通信が確立しているか否かを判定できる。
【0047】
通信確立判定部38は、有線通信が確立していない状態から有線通信が確立すると「有線通信確立信号」をシステム制御回路36のMPU36cへ出力する。また、通信確立判定部38は、有線通信が確立している状態から有線通信が確立していない状態になると「有線通信切断信号」をシステム制御回路36のMPU36cへ出力する。
【0048】
また、無線通信における通信確立を判定する場合、例えば、IEEE802.11a/b/g/nやWirelessHDで規定される接続確認用のデータ送信を行い、ヘッド20の無線通信部24からの応答データ(Ack)の有無から無線通信部33とヘッド20の無線通信部24との間で無線通信が確立しているか否かを判定できる。
【0049】
通信確立判定部38は、無線通信が確立していない状態から無線通信が確立すると「無線通信確立信号」をシステム制御回路36のMPU36cへ出力する。また、通信確立判定部38は、無線通信が確立している状態から無線通信が確立していない状態になると「無線通信切断信号」をシステム制御回路36のMPU36cへ出力する。
【0050】
ライトソース40は、ランプとレンズを備える。また、ライトソース40には、光ファイバ60が接続される。ランプは、例えば、キセノンランプであり、イメージセンサ21の撮像範囲を露光するための光を発する。レンズは、ランプから発せられる光を光ファイバ60へ導入する。光ファイバ60へ導入された光は、スコープ10の先端部へ導かれ、イメージセンサ21の撮像範囲を露光する。
【0051】
(内視鏡装置1の起動時の動作)
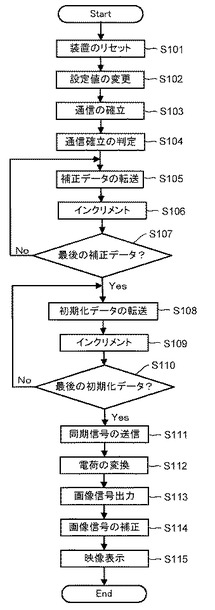
図6は、第1の実施形態に係る内視鏡装置1の動作を示すフローチャートである。以下、第1の実施形態に係る内視鏡装置1の動作について図6を参照して説明する。なお、以下の説明では、有線通信もしくは無線通信の一方が確立された場合を例に内視鏡装置1の動作を説明する。また、図6では、補正データの転送後に初期化データを転送しているが、初期化データの転送後に補正データを転送してもよい。
【0052】
(ステップS101)
CCU30の電源が投入されると、MPU36cは、画像信号処理回路34および画像出力回路35をリセットする。ここでいうリセットとは、具体的には、映像処理設定の初期化のことである。また、ライトソース40は、MPU36cからの制御信号に基づいて、ランプを発光させる。ランプからの光は、光ファイバ60へ導入され、スコープ10の先端部から照射されてイメージセンサ21の撮像範囲を露光する。
【0053】
(ステップS102)
MPU36cは、メモリ36aからCCU30の設定条件(例えば、露光期間やゲイン等)を読み出して、画像信号処理回路34および画像出力回路35の設定値をメモリ36aから読みだした値に変更する。
【0054】
(ステップS103)
CCU30の有線通信部31は、ヘッド20の有線通信部23との間で通信を開始する。また、CCU30の無線通信部33は、ヘッド20の無線通信部24との間で通信を開始する。通信確立判定部38は、CCU30の有線通信部31とヘッド20の有線通信部23との間の通信が確立すると「有線通信確立信号」を出力する。また、通信確立判定部38は、CCU30の無線通信部33とヘッド20の無線通信部24との間の通信が確立すると「無線通信確立信号」を出力する。
【0055】
(ステップS104)
MPU36cは、通信確立判定部38から出力される「有線通信確立信号」または「無線通信確立信号」に基づいて、有線または無線のどちらで通信が確立されたかを判定する。
【0056】
(ステップS105)
MPU36cは、通信確立判定部38から「有線通信確立信号」または「無線通信確立信号」が出力されると、ヘッド20のメモリ22から補正データの取得を開始する。この際、MPU36cは、通信確立判定部38から「有線通信確立信号」が出力されていると有線通信により、ヘッド20のメモリ22から補正データを送信するように転送制御部26へ指示する。また、MPU36cは、通信確立判定部38から「無線通信確立信号」が出力されていると無線通信により、ヘッド20のメモリ22から補正データを送信するように転送制御部26へ指示する。
【0057】
(ステップS106)
初めに、MPU36cは、IDおよび補正データ数を送信するよう転送制御部26へ指示し、送信されるIDおよび補正データ数をメモリ36aへ記憶する。次に、MPU36cは、補正データを順次送信するように転送制御部26へ指示し、送信される補正データをメモリ36aへ記憶する。この際、MPU36cは、補正データをメモリ22へ一つ記憶する度に内蔵カウンタの値をインクリメントする。
【0058】
(ステップS107)
MPU36cは、ステップS106で記憶した補正データが最後の補正データであるかどうかを判定する。具体的には、MPU36cは、内蔵カウンタの値がメモリ36aに記憶した補正データ数と同じであるか否かを判定する。
【0059】
MPU36cは、内蔵カウンタの値がメモリ36aに記憶した補正データ数と同じでない場合(ステップS107のNoの場合)、内蔵カウンタの値がメモリ36aに記憶した補正データ数と同じになるまでステップS10からステップS107の動作を繰り返す。
【0060】
(ステップS108)
MPU36cは、内蔵カウンタの値がメモリ36aに記憶した補正データ数と同じである場合(ステップS107のYesの場合)、MPU36cは、メモリ36aから初期化データ(例えば、解像度、クロック、モード等)を読み出してヘッド20へ送信する。ヘッド20へ送信された処理化データは、転送制御部26によりメモリ22へ記憶される。
【0061】
(ステップS109)
MPU36cは、初期化データを転送する度に内蔵カウンタの値をインクリメントする。
【0062】
(ステップS110)
MPU36cは、ステップS108で転送した初期化データが最後の初期化データであるかどうかを判定する。具体的には、MPU36cは、内蔵カウンタの値がメモリ36aに記憶されている初期化データ数と同じであるか否かを判定する。
【0063】
MPU36cは、内蔵カウンタの値がメモリ36aに記憶した初期化データ数と同じでない場合(ステップS110のNoの場合)、内蔵カウンタの値がメモリ36aに記憶した初期化データ数と同じになるまでステップS108からステップS110の動作を繰り返す。
【0064】
MPU36cは、内蔵カウンタの値がメモリ36aに記憶した初期化データ数と同じである場合(ステップS110のYesの場合)、MPU36cは、次のステップへ進む。
【0065】
(ステップS111)
同期信号生成部34bは、同期信号を生成し、生成した同期信号を所定の時間間隔でヘッド20へ送信する。
【0066】
(ステップS112)
イメージセンサ21は、同期信号生成部34bから送信される同期信号を受信すると、走査線毎にフォトトランジスタへ電荷を蓄積し、各フォトトランジスタに蓄積された電荷を電圧に変換・増幅して読みだす。
【0067】
(ステップS113)
イメージセンサ21の各フォトトランジスタへ蓄積された電荷は、走査線毎に電圧に変換後、増幅して読みだされ、画像信号としてCCU30へ送信される。
【0068】
(ステップS114)
画像信号処理回路34の画像信号処理部34aは、ヘッド20から送信される画像信号に対して画素情報の並べ替えを行い、この並べ替えた画像信号に対して補正を行う。画像信号処理部34aは、メモリ36aへ記憶された補正データに基づいて画像信号を補正する。さらに、画像信号処理部34aは、補正後の画像信号に対してエンハンス処理等を行った後、画像出力回路35へ出力する。
【0069】
(ステップS115)
画像出力回路35は、画像信号処理部34aから出力される画像信号をアナログ及びデジタルのRGB(red, green, blue)信号として外部のモニタ(図示せず)へ出力し、該モニタに補正された画像が表示される。
【0070】
(内視鏡装置1のデータ転送時の動作)
次に、第1の実施形態に係る内視鏡装置1のデータ転送時の動作を以下の3つのケースに分けて説明する。
ケース1:無線通信が確立された後、有線通信が確立された場合。
ケース2:有線通信が確立された後、無線通信が確立された場合。
ケース3:有線通信が確立された後、無線通信が確立され、さらに、その後に有線通信が切断された場合。
【0071】
(ケース1)
ケース1の場合について説明する。無線通信が確立された後、有線通信が確立される状況としては、例えば、カメラケーブル50を外した状態で、内視鏡装置1を起動した後に、ヘッド20とCCU30とをカメラケーブル50で接続した場合が考えられる。
【0072】
図6のステップS103で、無線通信が先に確立されると、通信確立判定部38は、「無線通信確立信号」を出力する。MPU36cは、通信確立判定部38から出力される「無線通信確立信号」に基づいて、無線で通信が確立されたと判定し、無線通信によりID及び補正データを送信するように転送制御部26へ指示する。
【0073】
無線通信により、ID及び補正データの取得している際に、有線通信が確立されると通信確立判定部38が「有線通信確立信号」を出力すると、MPU36cは、通信確立判定部38から出力される「有線通信確立信号」に基づいて、有線で通信が確立されたと判定し、ヘッド20との通信を無線通信から有線通信切換えるように転送制御部26へ指示する。
【0074】
MPU36cは、有線通信によりIDを送信するように転送制御部26へ指示する。MPU36cは、転送制御部26から送信されてきたIDと、有線通信が確立された際に取得したIDとが同じであるかどうかを判定する。IDが同じである場合、MPU36cは、内蔵カウンタの値からどこまで補正データを転送したかを判断し、残りの補正データを有線通信で転送するよう転送制御部26へ指示する。また、IDが同じでない場合、MPU36cは、内蔵カウンタの値をリセットするとともに、転送制御部26へ補正データを初めから転送するように指示する。
【0075】
なお、上記説明では、補正データの転送時の動作について説明したが、初期化データおよび画像信号の転送時の動作についても同じである。すなわち、初期化データの転送時に有線通信が確立された場合、MPU36cは、ヘッド20との通信を無線通信から有線通信に切換えて、内蔵カウンタの値からどこまで初期化データを転送したかを判断し、残りの初期化データを有線通信で転送する。また、画像信号の転送時に有線通信が確立された場合、MPU36cは、ヘッド20との通信を無線通信から有線通信切換えて画像信号を有線通信で送信するよう転送制御部26へ指示する。
【0076】
(ケース2)
ケース2の場合について説明する。有線通信が確立された後、無線通信が確立される状況としては、例えば、カメラケーブル50を取り付けた状態で、内視鏡装置1を起動した場合が考えられる。通常、有線の方が無線よりも通信速度が速いため、カメラケーブル50を取り付けた状態で内視鏡装置1を起動した場合、有線通信が先に確立すると考えられる。
【0077】
図6のステップS103で、有線通信が先に確立されると、通信確立判定部38は、「
有線通信確立信号」を出力する。MPU36cは、通信確立判定部38から出力される「有線通信確立信号」に基づいて、有線で通信が確立されたと判定し、有線通信によりID及び補正データを送信するよう転送制御部26へ指示する。有線通信により、ID及び補正データを送信している際に、無線通信が確立されると通信確立判定部38が「無線通信確立信号」を出力する。
【0078】
MPU36cは、通信確立判定部38から出力される「無線通信確立信号」に基づいて、無線で通信が確立されたと判定するが、無線通信よりも有線通信の方が、通信速度が速く、通信の安定性が高いため、MPU36cは、通信の切換えは行わずに、有線通信のままで補正データを継続する。
【0079】
なお、上記説明では、補正データの転送時の動作について説明したが、初期化データおよび画像信号の転送時の動作についても同じである。すなわち、初期化データまたは画像信号の転送時に無線通信が確立された場合でも、通信の切換えは行わずに、有線通信のままで残りの初期化データまたは画像信号の転送を継続する。
【0080】
(ケース3)
ケース3の場合について説明する。有線通信が確立された後、無線通信が確立され、その後に有線通信が断絶する状況としては、例えば、カメラケーブル50を取り付けた状態で内視鏡装置1を起動し、その後にカメラケーブル50を取り外す状況が考えられる。
【0081】
図6のステップS103で、有線通信が先に確立されると、通信確立判定部38は、「有線通信確立信号」を出力する。MPU36cは、通信確立判定部38から出力される「有線通信確立信号」に基づいて、有線で通信が確立されたと判定し、有線通信によりID及び補正データを送信するよう転送制御部26へ指示する。有線通信により、ID及び補正データを送信している際に、無線通信が確立されると通信確立判定部38が「無線通信確立信号」を出力する。
【0082】
MPU36cは、通信確立判定部38から出力される「無線通信確立信号」に基づいて、無線で通信が確立されたと判定するが、無線通信よりも有線通信の方が、通信速度が速く、通信の安定性が高いため、MPU36cは、通信の切換えは行わずに、有線通信のままで残りの補正データの転送を継続する。
【0083】
その後、補正データの転送中にカメラケーブル50が取り外されると、通信確立判定部38は、有線通信の切断を検知して「有線通信切断信号」を出力する。MPU36cは、通信確立判定部38から出力される「有線通信切断信号」に基づいて、有線通信が切断されたと判定し、ヘッド20との通信を有線通信から無線通信切換える。
【0084】
通信切換え後、MPU36cは、無線通信によりIDを送信するように転送制御部26へ指示する。MPU36cは、転送制御部26から送信されてきたIDと、有線通信が確立された際に取得したIDとが同じであるかどうかを判定する。IDが同じである場合、MPU36cは、内蔵カウンタの値からどこまで補正データを転送したかを判断し、残りの補正データを無線通信で転送するよう転送制御部26へ指示する。また、IDが同じでない場合、MPU36cは、内蔵カウンタの値をリセットするとともに、転送制御部26へ補正データを初めから転送するように指示する。
【0085】
なお、上記説明では、補正データの転送時の動作について説明したが、初期化データおよび画像信号の転送時の動作についても同じである。すなわち、初期化データの転送時に有線通信が切断された場合、MPU36cは、ヘッド20との通信を有線通信から無線通信に切換えて、内蔵カウンタの値からどこまで初期化データを転送したかを判断し、残りの初期化データを無線通信で送信する。また、画像信号の転送時に有線通信が切断された場合、MPU36cは、ヘッド20との通信を有線通信から無線通信に切換えて画像信号を無線通信で送信するよう転送制御部26へ指示する。
【0086】
以上のように、この第1の実施形態に係る内視鏡装置1は、補正データおよび初期化データをどこまで転送したかを、カウンタを利用して記憶しているので、通信状態が無線から有線、もしくは有線から無線に切り替わった場合でも、補正データおよび初期化データを初めから転送し直す必要がなく効率的なデータの転送が可能となる。
【0087】
また、この第1の実施形態に係る内視鏡装置1では、有線通信を優先して使用している。通常、有線通信は無線通信に比べて通信速度が速く、通信の安定性が高い。このため、有線通信を優先して使用することにより、通信速度と安定性を確保することができる。
【0088】
さらに、有線通信が先に確立した場合でも無線通信を確立した状態を保つので、データ転送中に有線通信が切断された場合でも、直ぐに無線通信へ切り替えてデータの転送を継続することができる。
【0089】
(第2の実施形態)
この第2の実施形態では、有線通信と無線通信で補正データおよび初期化データを異なるファイル形式で転送する実施形態について説明する。なお、図1、図2、図5で説明した第1の実施形態に係る内視鏡装置1の構成と同一の構成については同一の符号を付して重複した説明を省略する。
【0090】
図7は、この第2の実施形態に係る内視鏡装置2の構成図である。図7に示すように、この第2の実施形態2に係る内視鏡装置2は、ヘッド20AとCCU30Aを備える点が、図1で説明した第1の実施形態1に係る内視鏡装置1の構成と異なる。
【0091】
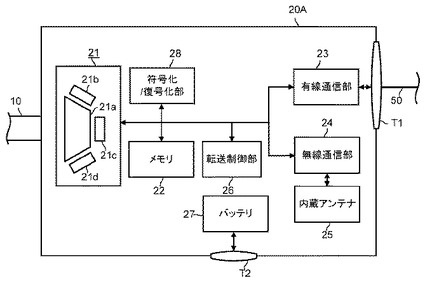
図8は、第2の実施形態に係る内視鏡装置2が備えるヘッド20Aの構成図である。図8に示すように、第2の実施形態に係る内視鏡装置2のヘッド20Aは、符号化/復号化部28を備える点が第1の実施形態に係る内視鏡装置1のヘッド20と異なる。
【0092】
ヘッド20Aの符号化/復号化部28は、転送制御部26からの指示に基づいて、メモリ22からCCU30Aへ転送する補正データおよび画像信号のデータを可逆圧縮する。また、符号化/復号化部28は、転送制御部26からの指示に基づいて、CCU30Aからメモリ22へ転送される初期化データを復号化する。
【0093】
具体的には、無線通信を使用して補正データおよび画像信号のデータがCCU30Aへ転送される場合、転送制御部26は、CCU30Aへ転送する補正データおよび画像信号のデータを可逆圧縮(符号化)するように符号化/復号化部28へ指示し、転送制御部26は、符号化/復号化部28で可逆圧縮された補正データおよび画像信号のデータをヘッド20Aへ送信する。また、転送制御部26は、無線通信を使用して初期化データがCCU30Aから送信されている場合、この可逆圧縮された初期化データを復号化して圧縮前のデータに戻すように符号化/復号化部28へ指示し、復号化された初期化データをメモリ22へ記憶する。
【0094】
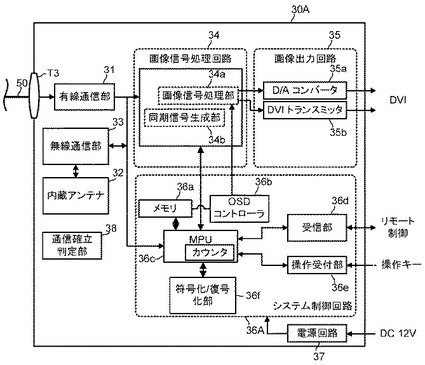
図9は、第2の実施形態に係る内視鏡装置2が備えるCCU30Aの構成図である。図9に示すように、第2の実施形態に係る内視鏡装置2のCCU30Aが備えるシステム制御回路36Aが符号化/復号化部36fを備える点が第1の実施形態に係る内視鏡装置1のCCU30Aと異なる。
【0095】
CCU30Aの符号化/復号化部36fは、MPU36cからの指示に基づいて、メモリ36aからヘッド20Aへ転送する初期化データを可逆圧縮する。また、符号化/復号化部36fは、MPU36cからの指示に基づいて、ヘッド20Aから転送される可逆圧縮された補正データおよび画像信号のデータを復号化する。
【0096】
具体的には、MPU36cは、無線通信を使用して初期化データをヘッド20Aへ送信する場合、送信する初期化データを可逆圧縮するよう符号化/復号化部36fへ指示し、符号化/復号化部36fで可逆圧縮された初期化データをヘッド20Aへ送信する。また、無線通信を使用して補正データおよび画像信号のデータがCCU30Aへ送信されている場合、補正データおよび画像信号のデータを復号化して圧縮前のデータに戻すように符号化/復号化部36fへ指示し、この復号化された補正データおよび画像信号のデータをメモリ36aへ記憶する。
【0097】
以上のように、この第2の実施形態に係る内視鏡装置2は、無線通信でデータ(補正データ、初期化データ、画像信号データ)を転送する際、可逆圧縮されたデータを転送する。通常、無線通信は、有線通信に比べて通信速度が遅いが、無線通信時には、転送するデータを可逆圧縮してデータ容量を小さくしているのでデータ転送に掛る時間を短縮することができる。
【0098】
(第3の実施形態)
図10は、第3の実施形態に係る内視鏡装置3の構成図である。以下、第3の実施形態に係る内視鏡装置3について説明するが、図1、図2、図5で説明した第1の実施形態に係る内視鏡装置1の構成と同一の構成については同一の符号を付して重複した説明を省略する。
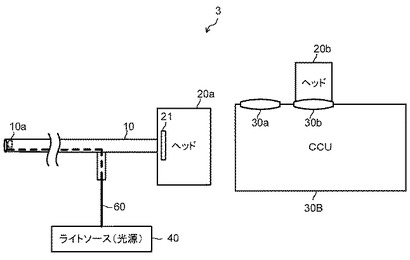
【0099】
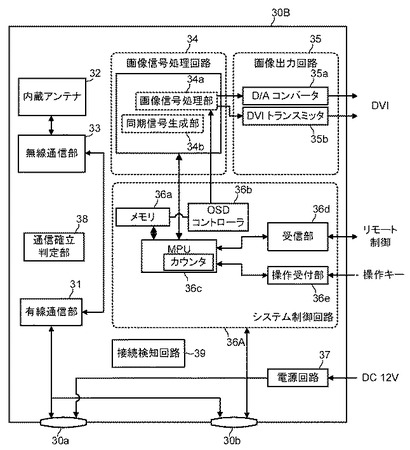
この第3の実施形態の内視鏡装置3は、複数のヘッド20a,20bと、ヘッド20a,20bが共通で使用するCCU30Bを備える。CCU30Bには、ヘッド20a,20bが内蔵するバッテリを充電するための複数の端子30a,30bを備え、この端子30a,30bに接続されたヘッド20a,20bのバッテリを充電中に、補正データおよび初期化データの転送を済ませる。
【0100】
なお、この第3の実施形態では、使用中のヘッド(図10では、ヘッド20a)は、無線通信でCCU30Bとの通信を行い、それ以外のヘッド(図10では、ヘッド20b)は、CCU30Bの端子30a,30bのいずれかに接続されてバッテリが充電される。
【0101】
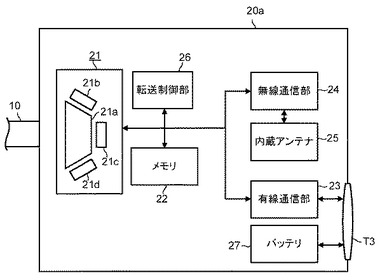
図11は、ヘッド20aの構成図である。なお、各ヘッド20a,20bの構成は同じであるため、ここでは、ヘッド20aについてのみ説明する。
図11に示すように、この第3の実施形態に係る内視鏡装置3のヘッド20aは、有線通信部23の接続端子と、バッテリ27の充電端子とが一体となった端子T3を備える点が、図2で説明した第1の実施形態に係る内視鏡装置1のヘッド20と異なる。この端子T3をCCU30Bの端子30a,30bのいずれかに接続することで、CCU30Bとの有線通信およびバッテリ27の充電が可能となる。なお、各ヘッド20a,20bのメモリ22には、互いに異なるID(識別子)がそれぞれ記憶されている。
なお、有線通信部23の接続端子とバッテリ27の充電端子とは、必ずしも一体でなくてもよく、ヘッドをCCU30Bに接触させたときに両方の端子に接触する形状であれば、別端子で構成してもよい。
【0102】
図12は、CCU30Bの構成図である。
図12に示すように、CCU30Bは、複数の端子30a,30bと接続検知回路39を備えている。各端子30a,30bは、有線通信部31の接続端子とヘッド20a,20bが内蔵するバッテリ27の充電端子とが一体となった端子である。端子30a,30bは、それぞれ有線通信部31および電源回路37に接続されており、ヘッド20a,20bの端子T3が接続されるとヘッド20a,20bとの有線通信およびヘッド20a,20bのバッテリ27の充電が可能となる。
【0103】
接続検知回路39は、ヘッド20a,20bの端子30a,30bへの接続を検知する。接続検知回路39は、ヘッド20a,20bの端子T3が端子30a,30bと接続されると、ヘッド20a,20bが接続された端子をMPU36cおよび電源回路37へ通知する。
【0104】
次に、第3の実施形態に係る内視鏡装置3が備えるヘッド20a,20bの充電中の動作について説明する。図13は、第3の実施形態に係る内視鏡装置3の動作を示すフローチャートである。なお、以下の説明では、ヘッド20aが使用中であり、ヘッド20bがCCU30Bの端子30bへ接続された場合の動作について説明する。
【0105】
(ステップS201)
ヘッド20bの端子T3が、CCU30Bが備える端子30bに接続されると、端子30bにヘッド20aまたはヘッド20bのいずれかが接続されたことが接続検知回路39により検知される。接続検知回路39は、端子30bにヘッドが接続されたことをMPU36cおよび電源回路37へ通知する。
【0106】
(ステップS202)
電源回路37は、接続検知回路39からの通知に基づいて、通知された端子30bへ電力を供給されヘッド20bのバッテリ27の充電が開始される。
【0107】
(ステップS203)
MPU36cは、接続検知回路39からの通知に基づいて、有線通信部31へヘッド20bと有線通信を確立するように指示する。有線通信部31は、MPU36cからの指示に基づき端子30bを介してヘッド20bの有線通信部23との有線通信を確立する。
【0108】
(ステップS204)
有線通信が確立すると、MPU36cは、ヘッド20bのメモリ22からIDを送信するように転送制御部26へ指示し、送信されるIDをメモリ36aへ記憶する。
【0109】
(ステップS205)
MPU36cは、IDを記憶すると、ヘッド20bのメモリ22から補正データを送信するように転送制御部26へ指示し、送信される補正データを、先に読み出されたIDに対応づけてメモリ36aへ記憶する。
【0110】
(ステップS206)
初めに、MPU36cは、補正データの数を送信するように転送制御部26へ指示し、送信された補正データ数をメモリ36aへ記憶する。次に、MPU36cは、メモリ22に記憶されている補正データを順次送信するように転送制御部26へ指示し、送信される補正データをメモリ36aへ記憶する。この際、MPU36cは、補正データをメモリ36aへ記憶する度に内蔵カウンタの値をインクリメントする。
【0111】
(ステップS207)
MPU36cは、ステップS106でメモリ36aへ記憶した補正データが最後の補正データであるかどうかを判定する。具体的には、MPU36cは、内蔵カウンタの値がメモリ36aに記憶した補正データ数と同じであるか否かを判定する。
【0112】
MPU36cは、内蔵カウンタの値がメモリ36aに記憶した補正データ数と同じでない場合(ステップS207のNoの場合)、内蔵カウンタの値がメモリ36aに記憶した補正データ数と同じになるまでステップS205からステップS207の動作を繰り返す。
【0113】
(ステップS208)
MPU36cは、内蔵カウンタの値がメモリ36aに記憶した補正データ数と同じである場合(ステップS207のYesの場合)、MPU36cは、メモリ36aから初期化データ(例えば、解像度、クロック、モード等)を読み出してヘッド20へ送信する。ヘッド20へ送信された初期化データは、転送制御部26によりメモリ22へ記憶される。
【0114】
(ステップS209)
MPU36cは、初期化データを転送する度に内蔵カウンタの値をインクリメントする。
【0115】
(ステップS210)
MPU36cは、ステップS208で転送した初期化データが最後の初期化データであるかどうかを判定する。具体的には、MPU36cは、内蔵カウンタの値がメモリ36aに記憶されている初期化データ数と同じであるか否かを判定する。
【0116】
MPU36cは、内蔵カウンタの値がメモリ36aに記憶した初期化データ数と同じでない場合(ステップS210のNoの場合)、内蔵カウンタの値がメモリ36aに記憶した初期化データ数と同じになるまでステップS208からステップS210の動作を繰り返す。
【0117】
MPU36cは、内蔵カウンタの値がメモリ36aに記憶した初期化データ数と同じである場合(ステップS210のYesの場合)、MPU36cは、初期化データの転送を終了する。
【0118】
以上のように、この第3の実施形態に係る内視鏡装置3は、複数のヘッド20a,20bと、ヘッド20a,20bが共通で使用するCCU30Bを備え、CCU30の端子30a,30bに接続されたヘッド20a,20bのバッテリを充電中に、補正データおよび初期化データの転送を済ませるので、ヘッド20a,20bの使用時に補正データおよび初期化データを、有線通信に比べて通信速度が遅い無線通信で転送する必要がなく、直ぐにヘッド20a,20bから転送される画像信号を補正して鮮明な画像を得ることができるためユーザの利便性が向上する。
【0119】
(その他の実施形態)
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。例えば、第1の実施形態では、CCU30側から有線通信および無線通信の確立を開始しているが、ヘッド20側から有線通信および無線通信の確立を開始するように構成してもよい。
【符号の説明】
【0120】
1〜3…内視鏡装置(撮像装置)、10…スコープ、10a…対物レンズ、20…ヘッド(ヘッド部)、21…イメージセンサ、21a…プリズム、22…メモリ、23…有線通信部、24…無線通信部、25…内蔵アンテナ、26…転送制御部、27…バッテリ、28…符号化/復号化部、30…CCU(本体部)、31…有線通信部、32…内蔵アンテナ、33…無線通信部、34…画像信号処理回路、34a…画像信号処理部、34b…同期信号生成部、35…画像出力回路、35a…コンバータ、35b…トランスミッタ、36…システム制御回路、36a…メモリ、36b…コントローラ、36d…受信部、36e…操作受付部、36f…復号化部、37…電源回路、38…通信確立判定部、40…ライトソース、50…カメラケーブル、60…光ファイバ。
【技術分野】
【0001】
本発明の実施形態は、被写体を撮像するヘッド部と、ヘッド部から送信される画像信号を処理する本体部とが分離したヘッド分離型の撮像装置、撮像方法及び内視鏡装置に関する。
【背景技術】
【0002】
従来の撮像装置には、被写体を撮像するイメージセンサ(例えば、CCD(Charge Coupled Device)センサやCMOS(Complementary Metal Oxide Semiconductor)センサ等)を備えたカメラ装置(ヘッド部)がホスト装置(本体部)に着脱可能に装着され、カメラ装置をホスト装置から外した状態で使用する場合は、カメラ装置で撮像される画像の画像信号を無線通信によりホスト装置へ送信し、カメラ装置をホスト装置に装着した状態で使用する場合は、カメラ装置で撮像される画像の画像信号を有線通信によりホスト装置へ送信するものがある(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−28740号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の撮像装置には、イメージセンサで撮像される画像の画像信号を補正する補正データをヘッド部に記憶するものがある。このような撮像装置では、装置の起動後に補正データをヘッド部から本体部に転送するが、この転送中にデータ通信が有線から無線、もしくは無線から有線に切り替わると、補正データの転送を初めからやり直していた。このため、補正データの送信中に通信が切り替わると、一度転送した補正データを再度転送し直す必要があり、利用者の利便性が低くなるという問題があった。
本発明は、かかる従来の課題を解決するためになされたものであり、通信状態が切り替わった場合でも、転送したデータの続きからデータ転送が行われる撮像装置、撮像方法及び内視鏡装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の実施形態に係る撮像装置は、ヘッド部と、ヘッド部から送信される画像信号を処理する本体部とが分離したヘッド分離型の撮像装置であって、ヘッド部は、充電池を具備し、本体部は、ヘッド部の充電池を充電するための端子を具備し、ヘッド部が端子へ接続されたことを検出すると、ヘッド部と有線通信によりデータの送受信を行う。
【図面の簡単な説明】
【0006】
【図1】第1の実施形態に係る内視鏡装置の構成図である。
【図2】ヘッドの構成図である。
【図3】補正データの説明図である。
【図4】補正方法の説明図である。
【図5】CCUの構成図である。
【図6】内視鏡装置の動作を示すフローチャートである。
【図7】第2の実施形態に係る内視鏡装置の構成図である。
【図8】ヘッドの構成図である。
【図9】CCUの構成図である。
【図10】第3の実施形態に係る内視鏡装置の構成図である。
【図11】ヘッドの構成図である。
【図12】CCUの構成図である。
【図13】内視鏡装置の動作を示すフローチャートである。
【発明を実施するための形態】
【0007】
以下、図面を参照して、本発明の実施形態を詳細に説明する。
(第1の実施形態)
第1の実施形態では、撮像装置としてヘッド分離型の内視鏡装置を例にその構成を説明する。また、イメージセンサ(撮像素子)としてCMOS(Complementary Metal Oxide Semiconductor)センサを用いた実施形態について説明するが、CMOSセンサの代わりにCCD(Charge Coupled Device)センサ等、他のセンサを用いてもよい。
【0008】
図1は、第1の実施形態に係る内視鏡装置1の構成図である。内視鏡装置1は、先端に対物レンズ10aが設けられ、被検査体内へ挿入されるスコープ10と、対物レンズ10aの結像面に位置するイメージセンサ21(撮像手段)により撮像される画像信号を無線通信または有線通信により送信するヘッド20と、ヘッド20から送信される画像信号を処理するCCU(camera control unit)30と、撮像範囲を露光するライトソース40(光源)と、ライトソース40からの光をスコープ10の先端部へ導入するための光ファイバ60を備える。なお、スコープ10はヘッド20へ着脱可能に取り付けられる。カメラケーブル50は、ヘッド20とCCU30とが有線通信するためのケーブルであり、補正データ、画像信号、制御信号等を送受信するための信号線が収容されている。
【0009】
(ヘッド20の構成)
図2は、ヘッド20の構成図である。
ヘッド20は、イメージセンサ21、メモリ22、有線通信部23、無線通信部24、内蔵アンテナ25、バッテリ27、接続端子T1、充電端子T2を備える。イメージセンサ21は、三板式イメージセンサであり、対物レンズ10aからの光をR(Red),G(Green),B(Blue)の三色に色分解するプリズム21aと、このR,G,B色分解された光を電気信号に変換するCMOSセンサ21b〜21dから構成される。三板式イメージセンサは、1画素ごとにRGBの情報を保持するので色再現性に優れるという特性を有する。イメージセンサ21は、フルHD(high definition)に対応したカラーイメージセンサである。
【0010】
イメージセンサ21は、三板式ではなく単板式としてもよい。単板式のイメージセンサでは、CMOSセンサの各画素上に色フィルタを備え、CMOSセンサから出力される電気信号を回路にてR,G,B信号に色分解する。プリズムとCMOSセンサを貼り合わせる必要がないため安価に制作できるという特性を有する。なお、色フィルタの配列には、例えば、色差線順次配列やベイヤー配列等があるが、この第1の実施形態では、色差線順次配列やベイヤー配列に限らず種々の配列方式を使用することができる。
【0011】
メモリ22は、電気的に書き換え可能な不揮発性メモリ(例えば、フラッシュメモリ等)であり、イメージセンサ21の補正データ(補正情報)や設定条件(例えば、フレームレート、ゲイン、感度等)、ID(識別子)等が記憶される。なお、これらの補正データおよび設定条件等を記憶するメモリは、書き換えが可能であれば、フラッシュメモリ以外のメモリを使用してもよい。
【0012】
(補正データ)
イメージセンサ21には、固定パタンノイズ(FPN)とランダムノイズと呼ばれる2種類のノイズが存在するが、第1の実施形態では、ヘッド20に固定パタンノイズの補正データ(補正情報)をメモリ22へ記憶しておく。この補正データは、内視鏡装置1を起動した際に、ヘッド20からCCU30へ転送され、この転送された補正データを用いてイメージセンサ21から送信される画像信号が補正される。
【0013】
固定パタンノイズには、外部環境(例えば、温度や輝度)によってレベル(強度)が変化しない素地ノイズと、外部環境によりレベルが変化する欠陥ノイズ(例えば、白キズや黒キズ)がある。このメモリ22には、この2種類のノイズの補正データが記憶されている。以下、各素地ノイズおよび欠陥ノイズの補正データについて説明する。
【0014】
(素地ノイズの補正データ)
図3は、素地ノイズの補正データの説明図である。
素地ノイズは、外部環境によらず常に一定のノイズを生ずる。このため、イメージセンサ21が備えるCMOSセンサの素地ノイズを画素毎に予め測定しておき、図3に示すように、この素地ノイズを打ち消す補正データを画素毎にメモリ22に記憶しておく。この素地ノイズの補正データは、画素のアドレス順にメモリ22に記憶される。
【0015】
(欠陥画素の補正データ)
欠陥ノイズである白キズとは、本来出力されるべき値よりも高い値の画素データが出力されて、その受光素子に対応する画素が白く見える画素欠陥のことをいい、主に暗電流により生じる。暗電流とは、CMOSセンサにおいて、光を照射しない時にも流れている微弱な電流のことであり、主に熱的要因や絶縁不良のために生じる。暗電流が大きいと画像のノイズの原因となる。
【0016】
また、欠陥ノイズである黒キズとは、本来出力されるべき値よりも低い値の画素データが出力されて、その受光素子に対応する画素が黒く見える画素欠陥のことをいい、主にCMOSセンサ内のダストが原因で生じる。このダストにより、CMOSセンサへの画素へ入射する光が遮られたり、CMOSセンサの回路がショートしている場合に生じる欠陥である。
【0017】
イメージセンサ21が備えるCMOSセンサの全画素のうち白キズおよび黒キズ等の画素欠陥が生じているアドレスが欠陥画素の補正データとしてメモリ22に記憶される。図4は、欠陥画素の補正方法の説明図である。図4に示すように、欠陥画素の補正は、欠陥画素の左右両隣の画素の画像信号を足して2で除算した値を欠陥画素の画像信号とし、欠陥画素の画像信号を補正する。
【0018】
以上のように、メモリ22には、補正データとして以下の情報が同順で記憶されている。また、このメモリ22に記憶されている補正データを読み出す際は、同順(1→2→3)で読み出される。
1:補正データ数。
2:素地ノイズの補正データ(複数個)。
3:欠陥画素の補正データ(複数個)。
【0019】
なお、素地ノイズの補正データは、イメージセンサ21のCMOSセンサの各画素の補正データがアドレスと共に画素のアドレス順に記憶され、欠陥画素の補正データは、欠陥画素のアドレスが画素のアドレス順に記憶されている。
【0020】
有線通信部23は、シリアライザ及びLVDS(low voltage differential signaling)変換回路等を備え、メモリ22に記憶されている補正データやイメージセンサ21から出力される画像信号を接続端子T1に接続されたカメラケーブル50を介してCCU30へ送信する。また、後述するCCU30から送信される初期化データ(例えば、解像度、クロック、モード等)を受信する。なお、画像信号は、デジタル信号のままCCU30へ送信される。
【0021】
無線通信部24は、メモリ22に記憶されている補正データやイメージセンサ21から出力される画像信号を、内蔵アンテナ25を介してCCU30へ送信する。また、後述するCCU30から送信される初期化データを受信する。なお、無線通信には、例えば、IEEE802.11a/b/g/nやWirelessHDで規定される方式を利用すればよい。
【0022】
転送制御部26は、CCU30からの指示に基づいて、補正データおよび画素信号等のデータをCCU30へ転送する。
【0023】
バッテリ27は、ヘッド20が備える各回路(イメージセンサ21、メモリ22、有線通信部23、無線通信部24、内蔵アンテナ25、転送制御部26等)へ電力を供給する電源である。バッテリ27は、充電端子T2に接続された外部電源(例えば、コンセント)により充電される。なお、カメラケーブル50内にヘッド20へ電力を供給するための電力線を収容し、このカメラケーブル50を介して供給される電力によりバッテリ27を充電してもよい。
【0024】
(CCU30の構成)
図5は、CCU30の構成を示す図である。
接続端子T3、有線通信部31、内蔵アンテナ32、無線通信部33、画像信号処理回路34、画像出力回路35、システム制御回路36、電源回路37及び通信確立判定部38を備える。接続端子T3には、カメラケーブル50が接続される。
【0025】
有線通信部31は、図示しないデシリアライザ及びLVDS変換回路を備える。有線通信部31は、CCU30の電源が投入されると、ヘッド20の有線通信部23との通信の確立を開始し、通信が確立するとヘッド20からカメラケーブル50を介して送信される補正信号をシステム制御回路36へ、画像信号を画像信号処理回路34へ出力する。また、有線通信部31は、システム制御回路36から出力される制御信号や後述する初期化データを接続端子T3に接続されたカメラケーブル50を介してヘッド20へ送信する。
【0026】
無線通信部33は、CCU30の電源が投入されると、ヘッド20の無線通信部24との通信の確立を開始し、通信が確立すると内蔵アンテナ32で受信する補正信号をシステム制御回路36へ、画像信号を画像信号処理回路34へ出力する。また、無線通信部33は、システム制御回路36から出力される制御信号や初期化データを、内蔵アンテナ32を介してヘッド20へ送信する。なお、無線通信部33は、無線通信が確立するとヘッド20の無線通信部24へ定期的に信号を送信し、無線通信部24と無線通信が確立状態を維持する。
【0027】
画像信号処理回路34は、画像信号処理部34aと同期信号生成部34bを備える。画像信号処理部34aは、有線通信部31から出力される画像信号を処理して画像出力回路35へ出力する。画像信号処理部34aは、有線通信部31から出力される画像信号を画素のアドレス順に並べ替えた後、後述するMPU36cによりヘッド20のメモリ22から読出されてメモリ36aへ記憶された補正データに基づいて画像信号を補正する。
【0028】
(素地ノイズの補正)
画像信号処理部34aは、画像信号をアドレス順に並べ替えた後、同一のアドレスを有する画像信号にメモリ36aに記憶された補正データを加算することで画像信号を補正する。MPU36cによりメモリ36aに記憶された補正データは、イメージセンサ21が備えるCMOSセンサの素地ノイズを打ち消すように作成されているため、同一アドレスの画像信号に補正データを加算することで画像信号を補正することができる。
【0029】
(欠陥画素ノイズの補正)
画像信号処理部34aは、メモリ36aに記憶された欠陥画素のアドレスから欠陥画素の画像信号を認識し、この欠陥画素の左右両隣の画素の画像信号を足して2で除算した値を欠陥画素の画像信号とする。欠陥画素の画像信号を補正する。
【0030】
画像信号処理部34aは、補正後の画像信号に対してデモザイキング処理、ニー補正、ガンマ補正、ディテールやマトリクス処理等のエンハンス処理が行い、画像出力回路35へ入力する。
【0031】
同期信号生成部34bは、イメージセンサ21の撮像に用いられる同期信号を生成する。該同期信号は、設定されたフレームレートに応じた所定の間隔で生成される。生成された同期信号は、MPU36cへ出力されると共に、有線通信部31または無線通信部33からヘッド20へ送信される。
【0032】
画像出力回路35は、D/Aコンバータ35a及びDVI(digital visual interface)トランスミッタ35bを備え、画像信号処理回路34で処理された画像信号をアナログ及びデジタルのRGB(red, green, blue)信号として外部のモニタ(図示せず)へ出力する。なお、DVIトランスミッタ35bの代わりに、HD−SDI(high definition serial digital interface)トランスミッタやHD−DVI(high definition digital visual interface)を備えるようにしてもよい。
【0033】
システム制御回路36は、メモリ36a、OSD(on-screen display)コントローラ36b、MPU(micro processing unit)36c、受信部36d及び操作受付部36eを備え、この内視鏡装置1全体を制御する。メモリ36aは、電気的に書き換え可能なEEPROMである。このメモリ36aには、CCU30の設定条件(例えば、露光期間やゲイン等)やヘッド20の初期化データ、初期化データのデータ数(以下、初期化データ数と称する)が記憶されている。
【0034】
露光期間は、イメージセンサ21で撮像される画像の明るさを調整するパラメータであり、シャッタースピードに相当する。露光期間としては、数種類(例えば、1/240秒、1/120秒等)あればよい。この露光期間は、後述する外部のPC(personal computer)や操作キーにより設定を変更できる。
【0035】
この設定条件を記憶するメモリは、書き換えが可能であれば、EEPROM以外のメモリも使用できる。OSDコントローラ36bは、画像信号処理部34aで処理される画像信号の画像にテキストデータやビットマップ等を重畳表示する。
【0036】
MPU36cは、受信部36dで受信したリモート制御信、操作受付部で受付けた処理内容及びメモリ36aに記憶された設定情報に基づいてヘッド20、CCU30及びライトソース40を制御する。
【0037】
(補正データの転送)
また、MPU36cは、有線通信で送信するか無線通信で送信するかを指定して、ヘッド20のメモリ22に記憶されているIDおよび補正データを送信するようヘッド20の転送制御部26へ指示する。MPU36cは、ヘッド20の転送制御部26から送信されるIDおよび補正データをメモリ36aへ記憶する。
【0038】
初めに、MPU36cは、ヘッド20のメモリ22に記憶されているIDを送信するように転送制御部26へ指示し、送信されるIDをメモリ36aへ記憶する。次に、MPU36cは、ヘッド20のメモリ22に記憶されている補正データ数を送信するように転送制御部26へ指示し、送信される補正データ数をメモリ36aへ記憶する。
【0039】
さらに、MPU36cは、ヘッド20のメモリ22から素地ノイズの補正データと画素のアドレスを送信するように転送制御部26へ指示し、送信される素地ノイズの補正データと画素のアドレスをメモリ36aへ記憶する。
【0040】
次に、MPU36cは、ヘッド20のメモリ22から欠陥画素の補正データ(画素のアドレス)を送信するように転送制御部26へ指示し、送信される欠陥画素の補正データをCCU30のメモリ36aへ記憶する。MPU36cは、読みだした画素欠陥ノイズの補正データ(欠陥画素のアドレス)を読み出した順、すなわちアドレス順に記憶する。
【0041】
なお、MPU36cは、送信される補正データをメモリ36aに記憶する度に内蔵カウンタの値をインクリメントし、この内蔵カウンタの値がメモリ36aの補正データ数と同じになった時点で補正データの読出しが終了したと判断し、内蔵カウンタの値をリセットする。
【0042】
(初期化データの転送)
MPU36cは、さらに、メモリ36aに記憶されている初期化データを、有線通信部31もしくは無線通信部33を介してヘッド20へ送信する。送信された初期化データは、転送制御部26によりメモリ22へ記憶される。なお、MPU36cは、初期化データを読み出してヘッド20へ転送する度に内蔵カウンタの値をインクリメントし、この内蔵カウンタの値がメモリ36aに記憶されている初期化データ数と同じになった時点で初期化データの送信が終了したと判断し、内蔵カウンタの値をリセットする。
【0043】
なお、一般的に、有線通信は無線通信に比べて通信速度が速く、通信の安定性が高いため、MPU36cは、無線通信と有線通信の両方が確立している場合、有線通信を優先して使用する。
【0044】
受信部36dは、外部のPC等から送信されるリモート制御用の制御信号を受信してMPU36cへ出力する。なお、外部PCとの通信は、RS232−C用シリアルポートを介して行われる。操作受付部36eは、外部の操作キーで操作された処理を受け付けMPU36cへ出力する。操作受付部36eで受付けられる操作としては、例えば、画像信号の補正を行う/行わないといった操作(補正のON/OFF操作)やゲインの設定値の操作等がある。
【0045】
電源回路37は、外部から供給される電力を所定の電圧に変換してCCU30内の各回路へ供給する。また、上記電力は、接続端子T3に接続されたカメラケーブル50を介してヘッド20にも供給される。
【0046】
通信確立判定部38は、ヘッド20との間で有線通信および無線通信が確立されているどうかを判定する。この通信確立判定部38での通信確立の判定には種々の方法を用いることができる。例えば、この第1の実施形態では、有線通信で画像信号を送信する際にLVDSを使用している。LVDSでは、差動信号により画像信号を伝送しているので、2本の伝送路間の電圧の有無から有線通信部31とヘッド20の有線通信部23との間で有線通信が確立しているか否かを判定できる。
【0047】
通信確立判定部38は、有線通信が確立していない状態から有線通信が確立すると「有線通信確立信号」をシステム制御回路36のMPU36cへ出力する。また、通信確立判定部38は、有線通信が確立している状態から有線通信が確立していない状態になると「有線通信切断信号」をシステム制御回路36のMPU36cへ出力する。
【0048】
また、無線通信における通信確立を判定する場合、例えば、IEEE802.11a/b/g/nやWirelessHDで規定される接続確認用のデータ送信を行い、ヘッド20の無線通信部24からの応答データ(Ack)の有無から無線通信部33とヘッド20の無線通信部24との間で無線通信が確立しているか否かを判定できる。
【0049】
通信確立判定部38は、無線通信が確立していない状態から無線通信が確立すると「無線通信確立信号」をシステム制御回路36のMPU36cへ出力する。また、通信確立判定部38は、無線通信が確立している状態から無線通信が確立していない状態になると「無線通信切断信号」をシステム制御回路36のMPU36cへ出力する。
【0050】
ライトソース40は、ランプとレンズを備える。また、ライトソース40には、光ファイバ60が接続される。ランプは、例えば、キセノンランプであり、イメージセンサ21の撮像範囲を露光するための光を発する。レンズは、ランプから発せられる光を光ファイバ60へ導入する。光ファイバ60へ導入された光は、スコープ10の先端部へ導かれ、イメージセンサ21の撮像範囲を露光する。
【0051】
(内視鏡装置1の起動時の動作)
図6は、第1の実施形態に係る内視鏡装置1の動作を示すフローチャートである。以下、第1の実施形態に係る内視鏡装置1の動作について図6を参照して説明する。なお、以下の説明では、有線通信もしくは無線通信の一方が確立された場合を例に内視鏡装置1の動作を説明する。また、図6では、補正データの転送後に初期化データを転送しているが、初期化データの転送後に補正データを転送してもよい。
【0052】
(ステップS101)
CCU30の電源が投入されると、MPU36cは、画像信号処理回路34および画像出力回路35をリセットする。ここでいうリセットとは、具体的には、映像処理設定の初期化のことである。また、ライトソース40は、MPU36cからの制御信号に基づいて、ランプを発光させる。ランプからの光は、光ファイバ60へ導入され、スコープ10の先端部から照射されてイメージセンサ21の撮像範囲を露光する。
【0053】
(ステップS102)
MPU36cは、メモリ36aからCCU30の設定条件(例えば、露光期間やゲイン等)を読み出して、画像信号処理回路34および画像出力回路35の設定値をメモリ36aから読みだした値に変更する。
【0054】
(ステップS103)
CCU30の有線通信部31は、ヘッド20の有線通信部23との間で通信を開始する。また、CCU30の無線通信部33は、ヘッド20の無線通信部24との間で通信を開始する。通信確立判定部38は、CCU30の有線通信部31とヘッド20の有線通信部23との間の通信が確立すると「有線通信確立信号」を出力する。また、通信確立判定部38は、CCU30の無線通信部33とヘッド20の無線通信部24との間の通信が確立すると「無線通信確立信号」を出力する。
【0055】
(ステップS104)
MPU36cは、通信確立判定部38から出力される「有線通信確立信号」または「無線通信確立信号」に基づいて、有線または無線のどちらで通信が確立されたかを判定する。
【0056】
(ステップS105)
MPU36cは、通信確立判定部38から「有線通信確立信号」または「無線通信確立信号」が出力されると、ヘッド20のメモリ22から補正データの取得を開始する。この際、MPU36cは、通信確立判定部38から「有線通信確立信号」が出力されていると有線通信により、ヘッド20のメモリ22から補正データを送信するように転送制御部26へ指示する。また、MPU36cは、通信確立判定部38から「無線通信確立信号」が出力されていると無線通信により、ヘッド20のメモリ22から補正データを送信するように転送制御部26へ指示する。
【0057】
(ステップS106)
初めに、MPU36cは、IDおよび補正データ数を送信するよう転送制御部26へ指示し、送信されるIDおよび補正データ数をメモリ36aへ記憶する。次に、MPU36cは、補正データを順次送信するように転送制御部26へ指示し、送信される補正データをメモリ36aへ記憶する。この際、MPU36cは、補正データをメモリ22へ一つ記憶する度に内蔵カウンタの値をインクリメントする。
【0058】
(ステップS107)
MPU36cは、ステップS106で記憶した補正データが最後の補正データであるかどうかを判定する。具体的には、MPU36cは、内蔵カウンタの値がメモリ36aに記憶した補正データ数と同じであるか否かを判定する。
【0059】
MPU36cは、内蔵カウンタの値がメモリ36aに記憶した補正データ数と同じでない場合(ステップS107のNoの場合)、内蔵カウンタの値がメモリ36aに記憶した補正データ数と同じになるまでステップS10からステップS107の動作を繰り返す。
【0060】
(ステップS108)
MPU36cは、内蔵カウンタの値がメモリ36aに記憶した補正データ数と同じである場合(ステップS107のYesの場合)、MPU36cは、メモリ36aから初期化データ(例えば、解像度、クロック、モード等)を読み出してヘッド20へ送信する。ヘッド20へ送信された処理化データは、転送制御部26によりメモリ22へ記憶される。
【0061】
(ステップS109)
MPU36cは、初期化データを転送する度に内蔵カウンタの値をインクリメントする。
【0062】
(ステップS110)
MPU36cは、ステップS108で転送した初期化データが最後の初期化データであるかどうかを判定する。具体的には、MPU36cは、内蔵カウンタの値がメモリ36aに記憶されている初期化データ数と同じであるか否かを判定する。
【0063】
MPU36cは、内蔵カウンタの値がメモリ36aに記憶した初期化データ数と同じでない場合(ステップS110のNoの場合)、内蔵カウンタの値がメモリ36aに記憶した初期化データ数と同じになるまでステップS108からステップS110の動作を繰り返す。
【0064】
MPU36cは、内蔵カウンタの値がメモリ36aに記憶した初期化データ数と同じである場合(ステップS110のYesの場合)、MPU36cは、次のステップへ進む。
【0065】
(ステップS111)
同期信号生成部34bは、同期信号を生成し、生成した同期信号を所定の時間間隔でヘッド20へ送信する。
【0066】
(ステップS112)
イメージセンサ21は、同期信号生成部34bから送信される同期信号を受信すると、走査線毎にフォトトランジスタへ電荷を蓄積し、各フォトトランジスタに蓄積された電荷を電圧に変換・増幅して読みだす。
【0067】
(ステップS113)
イメージセンサ21の各フォトトランジスタへ蓄積された電荷は、走査線毎に電圧に変換後、増幅して読みだされ、画像信号としてCCU30へ送信される。
【0068】
(ステップS114)
画像信号処理回路34の画像信号処理部34aは、ヘッド20から送信される画像信号に対して画素情報の並べ替えを行い、この並べ替えた画像信号に対して補正を行う。画像信号処理部34aは、メモリ36aへ記憶された補正データに基づいて画像信号を補正する。さらに、画像信号処理部34aは、補正後の画像信号に対してエンハンス処理等を行った後、画像出力回路35へ出力する。
【0069】
(ステップS115)
画像出力回路35は、画像信号処理部34aから出力される画像信号をアナログ及びデジタルのRGB(red, green, blue)信号として外部のモニタ(図示せず)へ出力し、該モニタに補正された画像が表示される。
【0070】
(内視鏡装置1のデータ転送時の動作)
次に、第1の実施形態に係る内視鏡装置1のデータ転送時の動作を以下の3つのケースに分けて説明する。
ケース1:無線通信が確立された後、有線通信が確立された場合。
ケース2:有線通信が確立された後、無線通信が確立された場合。
ケース3:有線通信が確立された後、無線通信が確立され、さらに、その後に有線通信が切断された場合。
【0071】
(ケース1)
ケース1の場合について説明する。無線通信が確立された後、有線通信が確立される状況としては、例えば、カメラケーブル50を外した状態で、内視鏡装置1を起動した後に、ヘッド20とCCU30とをカメラケーブル50で接続した場合が考えられる。
【0072】
図6のステップS103で、無線通信が先に確立されると、通信確立判定部38は、「無線通信確立信号」を出力する。MPU36cは、通信確立判定部38から出力される「無線通信確立信号」に基づいて、無線で通信が確立されたと判定し、無線通信によりID及び補正データを送信するように転送制御部26へ指示する。
【0073】
無線通信により、ID及び補正データの取得している際に、有線通信が確立されると通信確立判定部38が「有線通信確立信号」を出力すると、MPU36cは、通信確立判定部38から出力される「有線通信確立信号」に基づいて、有線で通信が確立されたと判定し、ヘッド20との通信を無線通信から有線通信切換えるように転送制御部26へ指示する。
【0074】
MPU36cは、有線通信によりIDを送信するように転送制御部26へ指示する。MPU36cは、転送制御部26から送信されてきたIDと、有線通信が確立された際に取得したIDとが同じであるかどうかを判定する。IDが同じである場合、MPU36cは、内蔵カウンタの値からどこまで補正データを転送したかを判断し、残りの補正データを有線通信で転送するよう転送制御部26へ指示する。また、IDが同じでない場合、MPU36cは、内蔵カウンタの値をリセットするとともに、転送制御部26へ補正データを初めから転送するように指示する。
【0075】
なお、上記説明では、補正データの転送時の動作について説明したが、初期化データおよび画像信号の転送時の動作についても同じである。すなわち、初期化データの転送時に有線通信が確立された場合、MPU36cは、ヘッド20との通信を無線通信から有線通信に切換えて、内蔵カウンタの値からどこまで初期化データを転送したかを判断し、残りの初期化データを有線通信で転送する。また、画像信号の転送時に有線通信が確立された場合、MPU36cは、ヘッド20との通信を無線通信から有線通信切換えて画像信号を有線通信で送信するよう転送制御部26へ指示する。
【0076】
(ケース2)
ケース2の場合について説明する。有線通信が確立された後、無線通信が確立される状況としては、例えば、カメラケーブル50を取り付けた状態で、内視鏡装置1を起動した場合が考えられる。通常、有線の方が無線よりも通信速度が速いため、カメラケーブル50を取り付けた状態で内視鏡装置1を起動した場合、有線通信が先に確立すると考えられる。
【0077】
図6のステップS103で、有線通信が先に確立されると、通信確立判定部38は、「
有線通信確立信号」を出力する。MPU36cは、通信確立判定部38から出力される「有線通信確立信号」に基づいて、有線で通信が確立されたと判定し、有線通信によりID及び補正データを送信するよう転送制御部26へ指示する。有線通信により、ID及び補正データを送信している際に、無線通信が確立されると通信確立判定部38が「無線通信確立信号」を出力する。
【0078】
MPU36cは、通信確立判定部38から出力される「無線通信確立信号」に基づいて、無線で通信が確立されたと判定するが、無線通信よりも有線通信の方が、通信速度が速く、通信の安定性が高いため、MPU36cは、通信の切換えは行わずに、有線通信のままで補正データを継続する。
【0079】
なお、上記説明では、補正データの転送時の動作について説明したが、初期化データおよび画像信号の転送時の動作についても同じである。すなわち、初期化データまたは画像信号の転送時に無線通信が確立された場合でも、通信の切換えは行わずに、有線通信のままで残りの初期化データまたは画像信号の転送を継続する。
【0080】
(ケース3)
ケース3の場合について説明する。有線通信が確立された後、無線通信が確立され、その後に有線通信が断絶する状況としては、例えば、カメラケーブル50を取り付けた状態で内視鏡装置1を起動し、その後にカメラケーブル50を取り外す状況が考えられる。
【0081】
図6のステップS103で、有線通信が先に確立されると、通信確立判定部38は、「有線通信確立信号」を出力する。MPU36cは、通信確立判定部38から出力される「有線通信確立信号」に基づいて、有線で通信が確立されたと判定し、有線通信によりID及び補正データを送信するよう転送制御部26へ指示する。有線通信により、ID及び補正データを送信している際に、無線通信が確立されると通信確立判定部38が「無線通信確立信号」を出力する。
【0082】
MPU36cは、通信確立判定部38から出力される「無線通信確立信号」に基づいて、無線で通信が確立されたと判定するが、無線通信よりも有線通信の方が、通信速度が速く、通信の安定性が高いため、MPU36cは、通信の切換えは行わずに、有線通信のままで残りの補正データの転送を継続する。
【0083】
その後、補正データの転送中にカメラケーブル50が取り外されると、通信確立判定部38は、有線通信の切断を検知して「有線通信切断信号」を出力する。MPU36cは、通信確立判定部38から出力される「有線通信切断信号」に基づいて、有線通信が切断されたと判定し、ヘッド20との通信を有線通信から無線通信切換える。
【0084】
通信切換え後、MPU36cは、無線通信によりIDを送信するように転送制御部26へ指示する。MPU36cは、転送制御部26から送信されてきたIDと、有線通信が確立された際に取得したIDとが同じであるかどうかを判定する。IDが同じである場合、MPU36cは、内蔵カウンタの値からどこまで補正データを転送したかを判断し、残りの補正データを無線通信で転送するよう転送制御部26へ指示する。また、IDが同じでない場合、MPU36cは、内蔵カウンタの値をリセットするとともに、転送制御部26へ補正データを初めから転送するように指示する。
【0085】
なお、上記説明では、補正データの転送時の動作について説明したが、初期化データおよび画像信号の転送時の動作についても同じである。すなわち、初期化データの転送時に有線通信が切断された場合、MPU36cは、ヘッド20との通信を有線通信から無線通信に切換えて、内蔵カウンタの値からどこまで初期化データを転送したかを判断し、残りの初期化データを無線通信で送信する。また、画像信号の転送時に有線通信が切断された場合、MPU36cは、ヘッド20との通信を有線通信から無線通信に切換えて画像信号を無線通信で送信するよう転送制御部26へ指示する。
【0086】
以上のように、この第1の実施形態に係る内視鏡装置1は、補正データおよび初期化データをどこまで転送したかを、カウンタを利用して記憶しているので、通信状態が無線から有線、もしくは有線から無線に切り替わった場合でも、補正データおよび初期化データを初めから転送し直す必要がなく効率的なデータの転送が可能となる。
【0087】
また、この第1の実施形態に係る内視鏡装置1では、有線通信を優先して使用している。通常、有線通信は無線通信に比べて通信速度が速く、通信の安定性が高い。このため、有線通信を優先して使用することにより、通信速度と安定性を確保することができる。
【0088】
さらに、有線通信が先に確立した場合でも無線通信を確立した状態を保つので、データ転送中に有線通信が切断された場合でも、直ぐに無線通信へ切り替えてデータの転送を継続することができる。
【0089】
(第2の実施形態)
この第2の実施形態では、有線通信と無線通信で補正データおよび初期化データを異なるファイル形式で転送する実施形態について説明する。なお、図1、図2、図5で説明した第1の実施形態に係る内視鏡装置1の構成と同一の構成については同一の符号を付して重複した説明を省略する。
【0090】
図7は、この第2の実施形態に係る内視鏡装置2の構成図である。図7に示すように、この第2の実施形態2に係る内視鏡装置2は、ヘッド20AとCCU30Aを備える点が、図1で説明した第1の実施形態1に係る内視鏡装置1の構成と異なる。
【0091】
図8は、第2の実施形態に係る内視鏡装置2が備えるヘッド20Aの構成図である。図8に示すように、第2の実施形態に係る内視鏡装置2のヘッド20Aは、符号化/復号化部28を備える点が第1の実施形態に係る内視鏡装置1のヘッド20と異なる。
【0092】
ヘッド20Aの符号化/復号化部28は、転送制御部26からの指示に基づいて、メモリ22からCCU30Aへ転送する補正データおよび画像信号のデータを可逆圧縮する。また、符号化/復号化部28は、転送制御部26からの指示に基づいて、CCU30Aからメモリ22へ転送される初期化データを復号化する。
【0093】
具体的には、無線通信を使用して補正データおよび画像信号のデータがCCU30Aへ転送される場合、転送制御部26は、CCU30Aへ転送する補正データおよび画像信号のデータを可逆圧縮(符号化)するように符号化/復号化部28へ指示し、転送制御部26は、符号化/復号化部28で可逆圧縮された補正データおよび画像信号のデータをヘッド20Aへ送信する。また、転送制御部26は、無線通信を使用して初期化データがCCU30Aから送信されている場合、この可逆圧縮された初期化データを復号化して圧縮前のデータに戻すように符号化/復号化部28へ指示し、復号化された初期化データをメモリ22へ記憶する。
【0094】
図9は、第2の実施形態に係る内視鏡装置2が備えるCCU30Aの構成図である。図9に示すように、第2の実施形態に係る内視鏡装置2のCCU30Aが備えるシステム制御回路36Aが符号化/復号化部36fを備える点が第1の実施形態に係る内視鏡装置1のCCU30Aと異なる。
【0095】
CCU30Aの符号化/復号化部36fは、MPU36cからの指示に基づいて、メモリ36aからヘッド20Aへ転送する初期化データを可逆圧縮する。また、符号化/復号化部36fは、MPU36cからの指示に基づいて、ヘッド20Aから転送される可逆圧縮された補正データおよび画像信号のデータを復号化する。
【0096】
具体的には、MPU36cは、無線通信を使用して初期化データをヘッド20Aへ送信する場合、送信する初期化データを可逆圧縮するよう符号化/復号化部36fへ指示し、符号化/復号化部36fで可逆圧縮された初期化データをヘッド20Aへ送信する。また、無線通信を使用して補正データおよび画像信号のデータがCCU30Aへ送信されている場合、補正データおよび画像信号のデータを復号化して圧縮前のデータに戻すように符号化/復号化部36fへ指示し、この復号化された補正データおよび画像信号のデータをメモリ36aへ記憶する。
【0097】
以上のように、この第2の実施形態に係る内視鏡装置2は、無線通信でデータ(補正データ、初期化データ、画像信号データ)を転送する際、可逆圧縮されたデータを転送する。通常、無線通信は、有線通信に比べて通信速度が遅いが、無線通信時には、転送するデータを可逆圧縮してデータ容量を小さくしているのでデータ転送に掛る時間を短縮することができる。
【0098】
(第3の実施形態)
図10は、第3の実施形態に係る内視鏡装置3の構成図である。以下、第3の実施形態に係る内視鏡装置3について説明するが、図1、図2、図5で説明した第1の実施形態に係る内視鏡装置1の構成と同一の構成については同一の符号を付して重複した説明を省略する。
【0099】
この第3の実施形態の内視鏡装置3は、複数のヘッド20a,20bと、ヘッド20a,20bが共通で使用するCCU30Bを備える。CCU30Bには、ヘッド20a,20bが内蔵するバッテリを充電するための複数の端子30a,30bを備え、この端子30a,30bに接続されたヘッド20a,20bのバッテリを充電中に、補正データおよび初期化データの転送を済ませる。
【0100】
なお、この第3の実施形態では、使用中のヘッド(図10では、ヘッド20a)は、無線通信でCCU30Bとの通信を行い、それ以外のヘッド(図10では、ヘッド20b)は、CCU30Bの端子30a,30bのいずれかに接続されてバッテリが充電される。
【0101】
図11は、ヘッド20aの構成図である。なお、各ヘッド20a,20bの構成は同じであるため、ここでは、ヘッド20aについてのみ説明する。
図11に示すように、この第3の実施形態に係る内視鏡装置3のヘッド20aは、有線通信部23の接続端子と、バッテリ27の充電端子とが一体となった端子T3を備える点が、図2で説明した第1の実施形態に係る内視鏡装置1のヘッド20と異なる。この端子T3をCCU30Bの端子30a,30bのいずれかに接続することで、CCU30Bとの有線通信およびバッテリ27の充電が可能となる。なお、各ヘッド20a,20bのメモリ22には、互いに異なるID(識別子)がそれぞれ記憶されている。
なお、有線通信部23の接続端子とバッテリ27の充電端子とは、必ずしも一体でなくてもよく、ヘッドをCCU30Bに接触させたときに両方の端子に接触する形状であれば、別端子で構成してもよい。
【0102】
図12は、CCU30Bの構成図である。
図12に示すように、CCU30Bは、複数の端子30a,30bと接続検知回路39を備えている。各端子30a,30bは、有線通信部31の接続端子とヘッド20a,20bが内蔵するバッテリ27の充電端子とが一体となった端子である。端子30a,30bは、それぞれ有線通信部31および電源回路37に接続されており、ヘッド20a,20bの端子T3が接続されるとヘッド20a,20bとの有線通信およびヘッド20a,20bのバッテリ27の充電が可能となる。
【0103】
接続検知回路39は、ヘッド20a,20bの端子30a,30bへの接続を検知する。接続検知回路39は、ヘッド20a,20bの端子T3が端子30a,30bと接続されると、ヘッド20a,20bが接続された端子をMPU36cおよび電源回路37へ通知する。
【0104】
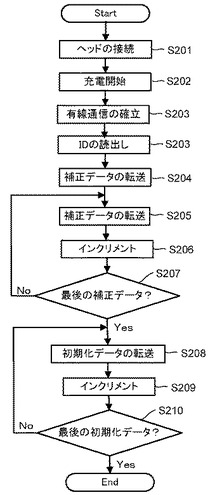
次に、第3の実施形態に係る内視鏡装置3が備えるヘッド20a,20bの充電中の動作について説明する。図13は、第3の実施形態に係る内視鏡装置3の動作を示すフローチャートである。なお、以下の説明では、ヘッド20aが使用中であり、ヘッド20bがCCU30Bの端子30bへ接続された場合の動作について説明する。
【0105】
(ステップS201)
ヘッド20bの端子T3が、CCU30Bが備える端子30bに接続されると、端子30bにヘッド20aまたはヘッド20bのいずれかが接続されたことが接続検知回路39により検知される。接続検知回路39は、端子30bにヘッドが接続されたことをMPU36cおよび電源回路37へ通知する。
【0106】
(ステップS202)
電源回路37は、接続検知回路39からの通知に基づいて、通知された端子30bへ電力を供給されヘッド20bのバッテリ27の充電が開始される。
【0107】
(ステップS203)
MPU36cは、接続検知回路39からの通知に基づいて、有線通信部31へヘッド20bと有線通信を確立するように指示する。有線通信部31は、MPU36cからの指示に基づき端子30bを介してヘッド20bの有線通信部23との有線通信を確立する。
【0108】
(ステップS204)
有線通信が確立すると、MPU36cは、ヘッド20bのメモリ22からIDを送信するように転送制御部26へ指示し、送信されるIDをメモリ36aへ記憶する。
【0109】
(ステップS205)
MPU36cは、IDを記憶すると、ヘッド20bのメモリ22から補正データを送信するように転送制御部26へ指示し、送信される補正データを、先に読み出されたIDに対応づけてメモリ36aへ記憶する。
【0110】
(ステップS206)
初めに、MPU36cは、補正データの数を送信するように転送制御部26へ指示し、送信された補正データ数をメモリ36aへ記憶する。次に、MPU36cは、メモリ22に記憶されている補正データを順次送信するように転送制御部26へ指示し、送信される補正データをメモリ36aへ記憶する。この際、MPU36cは、補正データをメモリ36aへ記憶する度に内蔵カウンタの値をインクリメントする。
【0111】
(ステップS207)
MPU36cは、ステップS106でメモリ36aへ記憶した補正データが最後の補正データであるかどうかを判定する。具体的には、MPU36cは、内蔵カウンタの値がメモリ36aに記憶した補正データ数と同じであるか否かを判定する。
【0112】
MPU36cは、内蔵カウンタの値がメモリ36aに記憶した補正データ数と同じでない場合(ステップS207のNoの場合)、内蔵カウンタの値がメモリ36aに記憶した補正データ数と同じになるまでステップS205からステップS207の動作を繰り返す。
【0113】
(ステップS208)
MPU36cは、内蔵カウンタの値がメモリ36aに記憶した補正データ数と同じである場合(ステップS207のYesの場合)、MPU36cは、メモリ36aから初期化データ(例えば、解像度、クロック、モード等)を読み出してヘッド20へ送信する。ヘッド20へ送信された初期化データは、転送制御部26によりメモリ22へ記憶される。
【0114】
(ステップS209)
MPU36cは、初期化データを転送する度に内蔵カウンタの値をインクリメントする。
【0115】
(ステップS210)
MPU36cは、ステップS208で転送した初期化データが最後の初期化データであるかどうかを判定する。具体的には、MPU36cは、内蔵カウンタの値がメモリ36aに記憶されている初期化データ数と同じであるか否かを判定する。
【0116】
MPU36cは、内蔵カウンタの値がメモリ36aに記憶した初期化データ数と同じでない場合(ステップS210のNoの場合)、内蔵カウンタの値がメモリ36aに記憶した初期化データ数と同じになるまでステップS208からステップS210の動作を繰り返す。
【0117】
MPU36cは、内蔵カウンタの値がメモリ36aに記憶した初期化データ数と同じである場合(ステップS210のYesの場合)、MPU36cは、初期化データの転送を終了する。
【0118】
以上のように、この第3の実施形態に係る内視鏡装置3は、複数のヘッド20a,20bと、ヘッド20a,20bが共通で使用するCCU30Bを備え、CCU30の端子30a,30bに接続されたヘッド20a,20bのバッテリを充電中に、補正データおよび初期化データの転送を済ませるので、ヘッド20a,20bの使用時に補正データおよび初期化データを、有線通信に比べて通信速度が遅い無線通信で転送する必要がなく、直ぐにヘッド20a,20bから転送される画像信号を補正して鮮明な画像を得ることができるためユーザの利便性が向上する。
【0119】
(その他の実施形態)
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。例えば、第1の実施形態では、CCU30側から有線通信および無線通信の確立を開始しているが、ヘッド20側から有線通信および無線通信の確立を開始するように構成してもよい。
【符号の説明】
【0120】
1〜3…内視鏡装置(撮像装置)、10…スコープ、10a…対物レンズ、20…ヘッド(ヘッド部)、21…イメージセンサ、21a…プリズム、22…メモリ、23…有線通信部、24…無線通信部、25…内蔵アンテナ、26…転送制御部、27…バッテリ、28…符号化/復号化部、30…CCU(本体部)、31…有線通信部、32…内蔵アンテナ、33…無線通信部、34…画像信号処理回路、34a…画像信号処理部、34b…同期信号生成部、35…画像出力回路、35a…コンバータ、35b…トランスミッタ、36…システム制御回路、36a…メモリ、36b…コントローラ、36d…受信部、36e…操作受付部、36f…復号化部、37…電源回路、38…通信確立判定部、40…ライトソース、50…カメラケーブル、60…光ファイバ。
【特許請求の範囲】
【請求項1】
ヘッド部と、前記ヘッド部から送信される画像信号を処理する本体部とが分離したヘッド分離型の撮像装置であって、
前記ヘッド部は、
前記画像信号の補正データを記憶する第1の記憶部と、
前記本体部からの指示信号に基づいて前記画像信号および又は前記補正データを符号化する符号化部と
符号化された前記画像信号および又は前記補正データを無線通信で前記本体部に送信する送信部と
を具備し、
前記本体部は、
前記ヘッド部と無線通信を確立し、前記符号化された画像信号および又は前記補正データの送信を指示する指示信号を前記ヘッド部に送信する制御部と、
前記指示に応じて送信された前記符号化された画像信号および又は前記補正データを受信する受信部と、
受信した前記符号化された画像信号および又は前記補正データを復号する復号化部と
を具備する撮像装置。
【請求項2】
前記符号化部は、前記符号化の際に前記画像信号および又は前記補正データを可逆圧縮する請求項1に記載の撮像装置。
【請求項3】
前記ヘッド部の前記第1の記憶部には、識別子が記憶され、
前記制御部は、
前記第1の記憶部から前記識別子を受信した後、前記符号化された画像信号および又は補正データを受信する請求項1に記載の撮像装置。
【請求項4】
前記本体部は、
前記無線通信により送信されたデータ数をカウントするカウンタをさらに具備し、前記カウンタのカウント数に基づいて前記データの送受信を継続して行う請求項1又は請求項2に記載の撮像装置。
【請求項5】
前記本体部は、
前記ヘッド部の初期化データを記憶する第2の記憶部をさらに具備し、
前記制御部は、
前記符号化された補正データを取得すると、前記第2の記憶部の前記初期化データを符号化して前記ヘッド部へ転送する請求項1に記載の撮像装置。
【請求項6】
ヘッド部と、前記ヘッド部から送信される画像信号を処理する本体部とが分離したヘッド分離型の撮像装置の作動方法であって、
前記ヘッド部と無線通信を確立し、前記ヘッド部に画像信号および又は前記画像信号の補正データの送信を指示する信号を前記ヘッド部に送信し、前記指示に応じて送信された前記符号化された画像信号および又は前記補正データを受信し、受信した前記符号化された画像信号および又は前記補正データを復号する撮像装置の作動方法。
【請求項7】
前記符号化された画像信号および又は前記補正データは、可逆圧縮されたものである請求項6に記載の撮像装置の作動方法。
【請求項8】
前記ヘッド部に記憶されている識別子を取得した後、前記符号化された画像信号および又は補正データを取得する請求項6に記載の撮像装置の作動方法。
【請求項9】
前記本体部は、
前記無線通信により送信されたデータ数をカウントするカウンタをさらに具備し、前記カウンタのカウント数に基づいて、前記データの送受信を継続して行う請求項6に記載の撮像装置の作動方法。
【請求項10】
前記符号化された補正データを取得すると、前記本体内部に記憶されている前記ヘッド部の初期化データを符号化して前記ヘッド部へ転送する請求項6に記載の撮像装置の作動方法。
【請求項11】
被検体内に挿入されるスコープを備え、前記被検体内を撮像するヘッド部と、前記ヘッド部から送信される画像信号を処理する本体部とが分離したヘッド分離型の内視鏡装置であって、
前記ヘッド部は、
前記画像信号の補正データを記憶する第1の記憶部と、
前記本体部からの指示信号に基づいて前記画像信号および又は前記補正データを符号化する符号化部と
符号化された前記画像信号および又は前記補正データを無線通信で前記本体部に送信する送信部と
を具備し、
前記本体部は、
前記ヘッド部と無線通信を確立し、前記符号化された画像信号および又は前記補正データの送信を指示する指示信号を前記ヘッド部に送信する制御部と、
前記指示に応じて送信された前記符号化された画像信号および又は前記補正データを受信する受信部と、
受信した前記符号化された画像信号および又は前記補正データを復号する復号化部と
を具備する内視鏡装置。
【請求項12】
前記符号化部は、前記符号化の際に前記画像信号および又は前記補正データを可逆圧縮する請求項11に記載の内視鏡装置。
【請求項13】
前記ヘッド部の前記第1の記憶部には、識別子が記憶され、
前記制御部は、
前記第1の記憶部から前記識別子を受信した後、前記符号化された画像信号および又は補正データを受信する請求項11に記載の内視鏡装置。
【請求項14】
前記本体部は、
前記無線通信により送信されたデータ数をカウントするカウンタをさらに具備し、前記カウンタのカウント数に基づいて前記データの送受信を継続して行う請求項11に記載の内視鏡装置。
【請求項15】
前記本体部は、
前記ヘッド部の初期化データを記憶する第2の記憶部をさらに具備し、
前記制御部は、
前記符号化された補正データを取得すると、前記第2の記憶部の前記初期化データを符号化して前記ヘッド部へ転送する請求項11に記載の内視鏡装置。
【請求項1】
ヘッド部と、前記ヘッド部から送信される画像信号を処理する本体部とが分離したヘッド分離型の撮像装置であって、
前記ヘッド部は、
前記画像信号の補正データを記憶する第1の記憶部と、
前記本体部からの指示信号に基づいて前記画像信号および又は前記補正データを符号化する符号化部と
符号化された前記画像信号および又は前記補正データを無線通信で前記本体部に送信する送信部と
を具備し、
前記本体部は、
前記ヘッド部と無線通信を確立し、前記符号化された画像信号および又は前記補正データの送信を指示する指示信号を前記ヘッド部に送信する制御部と、
前記指示に応じて送信された前記符号化された画像信号および又は前記補正データを受信する受信部と、
受信した前記符号化された画像信号および又は前記補正データを復号する復号化部と
を具備する撮像装置。
【請求項2】
前記符号化部は、前記符号化の際に前記画像信号および又は前記補正データを可逆圧縮する請求項1に記載の撮像装置。
【請求項3】
前記ヘッド部の前記第1の記憶部には、識別子が記憶され、
前記制御部は、
前記第1の記憶部から前記識別子を受信した後、前記符号化された画像信号および又は補正データを受信する請求項1に記載の撮像装置。
【請求項4】
前記本体部は、
前記無線通信により送信されたデータ数をカウントするカウンタをさらに具備し、前記カウンタのカウント数に基づいて前記データの送受信を継続して行う請求項1又は請求項2に記載の撮像装置。
【請求項5】
前記本体部は、
前記ヘッド部の初期化データを記憶する第2の記憶部をさらに具備し、
前記制御部は、
前記符号化された補正データを取得すると、前記第2の記憶部の前記初期化データを符号化して前記ヘッド部へ転送する請求項1に記載の撮像装置。
【請求項6】
ヘッド部と、前記ヘッド部から送信される画像信号を処理する本体部とが分離したヘッド分離型の撮像装置の作動方法であって、
前記ヘッド部と無線通信を確立し、前記ヘッド部に画像信号および又は前記画像信号の補正データの送信を指示する信号を前記ヘッド部に送信し、前記指示に応じて送信された前記符号化された画像信号および又は前記補正データを受信し、受信した前記符号化された画像信号および又は前記補正データを復号する撮像装置の作動方法。
【請求項7】
前記符号化された画像信号および又は前記補正データは、可逆圧縮されたものである請求項6に記載の撮像装置の作動方法。
【請求項8】
前記ヘッド部に記憶されている識別子を取得した後、前記符号化された画像信号および又は補正データを取得する請求項6に記載の撮像装置の作動方法。
【請求項9】
前記本体部は、
前記無線通信により送信されたデータ数をカウントするカウンタをさらに具備し、前記カウンタのカウント数に基づいて、前記データの送受信を継続して行う請求項6に記載の撮像装置の作動方法。
【請求項10】
前記符号化された補正データを取得すると、前記本体内部に記憶されている前記ヘッド部の初期化データを符号化して前記ヘッド部へ転送する請求項6に記載の撮像装置の作動方法。
【請求項11】
被検体内に挿入されるスコープを備え、前記被検体内を撮像するヘッド部と、前記ヘッド部から送信される画像信号を処理する本体部とが分離したヘッド分離型の内視鏡装置であって、
前記ヘッド部は、
前記画像信号の補正データを記憶する第1の記憶部と、
前記本体部からの指示信号に基づいて前記画像信号および又は前記補正データを符号化する符号化部と
符号化された前記画像信号および又は前記補正データを無線通信で前記本体部に送信する送信部と
を具備し、
前記本体部は、
前記ヘッド部と無線通信を確立し、前記符号化された画像信号および又は前記補正データの送信を指示する指示信号を前記ヘッド部に送信する制御部と、
前記指示に応じて送信された前記符号化された画像信号および又は前記補正データを受信する受信部と、
受信した前記符号化された画像信号および又は前記補正データを復号する復号化部と
を具備する内視鏡装置。
【請求項12】
前記符号化部は、前記符号化の際に前記画像信号および又は前記補正データを可逆圧縮する請求項11に記載の内視鏡装置。
【請求項13】
前記ヘッド部の前記第1の記憶部には、識別子が記憶され、
前記制御部は、
前記第1の記憶部から前記識別子を受信した後、前記符号化された画像信号および又は補正データを受信する請求項11に記載の内視鏡装置。
【請求項14】
前記本体部は、
前記無線通信により送信されたデータ数をカウントするカウンタをさらに具備し、前記カウンタのカウント数に基づいて前記データの送受信を継続して行う請求項11に記載の内視鏡装置。
【請求項15】
前記本体部は、
前記ヘッド部の初期化データを記憶する第2の記憶部をさらに具備し、
前記制御部は、
前記符号化された補正データを取得すると、前記第2の記憶部の前記初期化データを符号化して前記ヘッド部へ転送する請求項11に記載の内視鏡装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−78591(P2013−78591A)
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願番号】特願2012−254919(P2012−254919)
【出願日】平成24年11月21日(2012.11.21)
【分割の表示】特願2012−100768(P2012−100768)の分割
【原出願日】平成22年11月24日(2010.11.24)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願日】平成24年11月21日(2012.11.21)
【分割の表示】特願2012−100768(P2012−100768)の分割
【原出願日】平成22年11月24日(2010.11.24)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]