
撮像装置、発光装置及びカメラシステム
【課題】 撮像装置と発光装置とで電波無線通信を行う場合でも、送信系、伝送系、受信系の遅延時間を考慮し発光装置の発光と当該発光に対応する撮像装置の動作とを同期させる。
【解決手段】 電波通信手段を介して撮像装置と発光装置とが電波による通信を行うカメラシステムであって、前記発光装置に対する発光開始指示を前記電波通信手段へ出力する発光開始指示手段と、前記発光装置が前記電波通信手段からの前記発光開始指示を表すデータを受信し終わってから発光を開始するまでに要する第1の発光遅延時間を取得する取得手段と、前記取得手段により取得された第1の発光遅延時間と、前記発光開始指示手段が前記発光開始指示を出力してから前記電波通信手段が前記発光開始指示を表すデータを送信し終わるまでに要する第2の発光遅延時間とに基づいて、前記発光開始指示にしたがって行なわれる発光に対応する前記撮像装置の動作の開始タイミングを制御する。
【解決手段】 電波通信手段を介して撮像装置と発光装置とが電波による通信を行うカメラシステムであって、前記発光装置に対する発光開始指示を前記電波通信手段へ出力する発光開始指示手段と、前記発光装置が前記電波通信手段からの前記発光開始指示を表すデータを受信し終わってから発光を開始するまでに要する第1の発光遅延時間を取得する取得手段と、前記取得手段により取得された第1の発光遅延時間と、前記発光開始指示手段が前記発光開始指示を出力してから前記電波通信手段が前記発光開始指示を表すデータを送信し終わるまでに要する第2の発光遅延時間とに基づいて、前記発光開始指示にしたがって行なわれる発光に対応する前記撮像装置の動作の開始タイミングを制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、撮像装置と発光装置とが電波による無線通信を行う撮像装置、発光装置及びカメラシステムに関するものである。
【背景技術】
【0002】
近年、撮像装置と発光装置とを電波を利用した無線通信により接続するカメラシステムが開発されている。このカメラシステムでは、撮像装置は発光装置に対して発光の開始コマンドを電波によって送信し、発光装置はそのコマンドを受信して発光を開始する。
【0003】
しかし上記システムでは、障害物や他電波との干渉などの影響により使用環境によっては撮像装置の動作と無線接続された発光装置での発光とのタイミングを合わせることが困難な場合がある。
【0004】
そこで、例えば特許文献1では、ワイヤレス増灯システムのマスターから送信するパケットにタイミングデータを含ませ、撮影に関する処理の開始タイミングでパケットの送信状態を変更することで、リモート閃光装置の発光開始を指示する方法が提案されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−102337号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記システムでは、デジタル信号と電波との変調・復調期間等を含む遅延時間が発生するが、特許文献1では、電波送信側の変調期間、電波受信側の復調期間、送信側から受信側への電波受け渡し期間などは考慮されていない。そのため、カメラの動作とリモート閃光装置の発光とを正確に同期させることができない。
【0007】
本発明は、上記課題を鑑みてなされたものであり、撮像装置と発光装置とで電波による無線通信を行う場合であっても、送信系、伝送系、受信系の遅延時間を考慮し発光装置の発光と当該発光に対応する撮像装置の動作とを同期させることを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明に係る撮像装置は、電波通信手段を介して発光装置と電波による通信を行う撮像装置であって、前記発光装置に対する発光開始指示を前記電波通信手段へ出力する発光開始指示手段と、前記発光装置が前記電波通信手段からの前記発光開始指示を表すデータを受信し終わってから発光を開始するまでに要する第1の発光遅延時間を取得する取得手段と、前記取得手段により取得された第1の発光遅延時間と、前記発光開始指示手段が前記発光開始指示を出力してから前記電波通信手段が前記発光開始指示を表すデータを送信し終わるまでに要する第2の発光遅延時間とに基づいて、前記発光開始指示にしたがって行なわれる発光に対応する前記撮像装置の動作の開始タイミングを制御する制御手段と、を有することを特徴とする。
【0009】
また、上記目的を達成するために、本発明に係る発光装置は、他の発光装置と電波による通信を行う発光装置であって、撮像装置からの前記他の発光装置に対する発光開始指示を検知する検知手段と、前記検知手段により検知された前記発光開始指示に基づく発光開始指示を表すデータを前記他の発光装置へ送信する電波通信手段と、前記他の発光装置が前記電波通信手段からの前記発光開始指示を表すデータを受信し終わってから発光を開始するまでに要する第1の発光遅延時間を取得する取得手段と、前記取得手段により取得された前記第1の発光遅延時間と、前記検知手段が前記発光開始指示を検知してから前記電波通信手段が前記発光開始指示を表すデータを送信し終わるまでに要する第2の発光遅延時間とを前記撮像装置へ出力する出力手段と、を有することを特徴とする。
【0010】
また、上記目的を達成するために、本発明に係るカメラシステムは、電波通信手段を介して撮像装置と発光装置とが電波による通信を行うカメラシステムであって、前記発光装置に対する発光開始指示を前記電波通信手段へ出力する発光開始指示手段と、前記発光装置が前記電波通信手段からの前記発光開始指示を表すデータを受信し終わってから発光を開始するまでに要する第1の発光遅延時間を取得する取得手段と、前記取得手段により取得された第1の発光遅延時間と、前記発光開始指示手段が前記発光開始指示を出力してから前記電波通信手段が前記発光開始指示を表すデータを送信し終わるまでに要する第2の発光遅延時間とに基づいて、前記発光開始指示にしたがって行なわれる発光に対応する前記撮像装置の動作の開始タイミングを制御する制御手段と、を有することを特徴とする。
【発明の効果】
【0011】
本発明によれば、撮像装置と発光装置とで電波による無線通信を行う場合であっても、送信系、伝送系、受信系の遅延時間を考慮し発光装置の発光と当該発光に対応する撮像装置の動作とを同期させることができる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施の形態における、撮像装置としてのカメラの構成を示すブロック図である。
【図2】本発明の実施の形態における、発光装置としてのストロボ装置の電気的構成を示すブロック図である。
【図3】本発明の実施の形態における、撮像装置と発光装置とが電波による無線通信を行うカメラシステムを示す図である。
【図4】カメラ本体での主な動作を示すフローチャートである。
【図5】カメラ本体での主な動作を示すフローチャートである。
【図6】通常発光モードの発光タイミングを示す図である。
【図7】電波による無線通信の通信タイミングを示す図である。
【図8】電波による無線通信の発光タイミングを示す図である。
【図9】光による無線通信の発光タイミングを示す図である。
【発明を実施するための形態】
【0013】
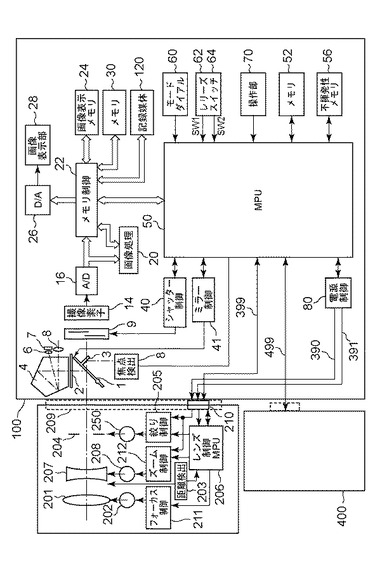
図1は、本発明の実施の形態における、撮像装置としてのカメラの構成を示したブロック図であり、100はカメラ本体である。
【0014】
1は主ミラーであり、ファインダー観察状態では撮影光路内に斜設され、撮影状態では撮影光路外に退避する。また、主ミラー1はハーフミラーとなっており、撮影光路内に斜設されているときは被写体からの光線の約半分を透過させる。2はピント板であり、後述の交換レンズ200で結像された被写体像が投影される。
【0015】
3はサブミラーであり、主ミラー1とともに、ファインダー観察状態では撮影光路内に斜設され、撮影状態では撮影光路外に退避する。このサブミラー3は、斜設された主ミラー1を透過した光線を下方に折り曲げて、後述の焦点検出ユニットの方に導くものである。4はファインダー光路変更用のペンタプリズム、5はファインダーであり、撮影者はこのファインダーからピント板2を観察することで、撮像画面を観察することができる。
【0016】
6と7は撮像画面内の被写体輝度を測定するための結像レンズと測光センサーである。8は公知の位相差方式の焦点検出ユニットである。9はフォーカルプレンシャッターであり、14は、CMOS等の撮像素子である。16は撮像素子14のアナログ信号出力をデジタル信号に変換するA/D変換器である。
【0017】
20は画像処理回路であり、A/D変換器16からのデータ或いはメモリ制御回路22からのデータに対して所定の画素補間処理などを行う。22はメモリ制御回路であり、A/D変換器16、画像処理回路20、画像表示メモリ24、D/A変換器26、メモリ30を制御する。
【0018】
26はD/A変換器、28はTFT LCD等から成る画像表示部であり、画像表示メモリ24に書き込まれた表示用の画像データはD/A変換器26を介してカメラ本体背面の画像表示部28により表示される。また、この画像表示部28は、カメラ操作用の表示インターフェースも兼ねており、カメラの様々な動作状態を表示する。
【0019】
30は撮影した静止画像や動画像を格納するためのメモリであり、所定枚数の静止画像や所定時間の動画像を格納するのに十分な記憶量を備えている。また、メモリ30はカメラMPU50の作業領域としても使用する。
【0020】
40はフォーカルプレンシャッター9を制御するシャッター制御部であり、41は主ミラー1をアップ、ダウンさせるためのモータと駆動回路からなるミラー制御部である。
【0021】
50はカメラ本体100全体を制御するカメラMPU、52はカメラMPU50の動作用の定数、変数、プログラム等を記憶するメモリである。56は電気的に消去・記録可能な不揮発性メモリであり、例えばEEPROM等が用いられる。
【0022】
60はモードダイアルスイッチで、撮影モード(マニュアル、絞り優先AE、シャッター優先AE、プログラムAE)の設定を切り換えることができる。62はレリーズスイッチSW1で、不図示のシャッターボタンの操作一段目でオンとなり、AF(オートフォーカス)処理、AE(自動露出)処理等の撮影準備動作の開始を指示する。
【0023】
64はレリーズスイッチSW2で、不図示のシャッターボタンの操作二段目でオンとなり、撮像素子14から読み出された信号をA/D変換器16、メモリ制御回路22を介してメモリ30に画像データとして書き込む露光処理等の撮影動作の開始を指示する。
【0024】
70は各種ボタンやタッチパネル等からなる操作部である。80は電源制御部で、DC−DCコンバータにより各種制御回路に必要な電圧を供給する。120はメモリカードやハードディスク等の記録媒体である。
【0025】
399は後述の交換レンズ200とカメラMPU50との通信を行う通信線であり、499は後述のストロボ装置400とカメラMPU50との通信を行う通信線である。
【0026】
次に交換レンズ200の説明をする。
【0027】
201は撮像素子14に結像される被写体像のフォーカス調整を行う為のフォーカシングレンズである。202はフォーカシングレンズ201を光軸方向に駆動して、フォーカスを合わせるためのフォーカス駆動アクチュエータで、211はレンズMPU206からの指令に基づき、フォーカス駆動アクチュエータ202を制御するフォーカス制御回路である。
【0028】
203はフォーカシングレンズ201の位置から被写体距離を検出する為のエンコーダからなる被写体距離検出部、204はカメラ本体100へ入射する光量を調整する為の絞り、250は絞り駆動アクチュエータである。
【0029】
205はレンズMPU206からの指令に基づき、絞り駆動アクチュエータ250を制御する絞り制御回路である。
【0030】
207は焦点距離調整を行うためのズーミングレンズ、208はズーミングレンズ207を光軸方向に駆動して、電気的に焦点距離調節を行うためのズーム駆動アクチュエータで、212はズーム駆動アクチュエータ208を制御するズーム制御回路である。
【0031】
206は前述のフォーカス駆動や絞り駆動などを制御するとともに、カメラMPU50との通信を制御するレンズMPUである。
【0032】
また、交換レンズ200はレンズマウント209を介して、着脱可能にカメラ本体100に装着される。また、電気的にはシリアル通信線と電源からなるコネクタ210でカメラ本体に接続される。
【0033】
400はカメラに着脱可能に装着される発光装置としてのストロボ装置であり、カメラ本体100から離れた位置に配置されたスレーブストロボと電波あるいは光を用いて無線通信を行う。
【0034】
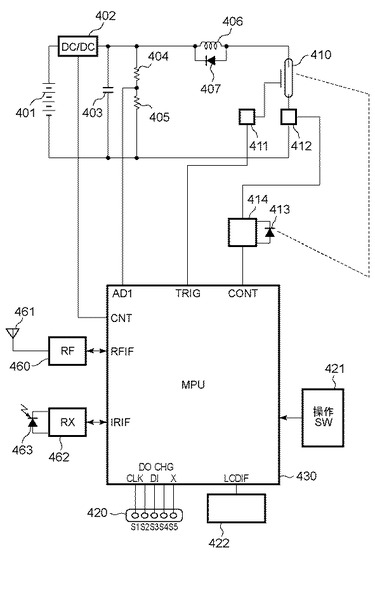
次に図2を用いてストロボ装置400の回路構成を説明する。
【0035】
ストロボ装置400は、カメラ本体100に接点群420にて電気的に接続される。401は電源電池である。402はDC−DCコンバータであり、電池電圧を数100Vに昇圧する。403は発光エネルギーを蓄積するメインコンデンサである。404、405は抵抗であり、メインコンデンサ403の電圧を所定比に分圧する。
【0036】
406は発光電流を制限するためのコイル、407は発光停止時に発生する逆起電圧を吸収するためのダイオード、410はXe(キセノン)管を用いた発光部である。411はトリガー発生回路、412はIGBTなどの発光制御回路である。
【0037】
413は発光制御用の受光センサーであるフォトダイオードであり、発光部410の光出力をモニタする。414は光量制御回路で、フォトダイオード413の光電流を増幅し、フォトダイオード413で受光した光が所定光量になると発光制御回路412の導通を制御することで、発光部410の発光量の調整を行う。
【0038】
421はストロボの動作モード(ノーマル、マスター、スレーブ)や他のストロボ装置との間で用いる通信モード(電波通信、光通信、通信しない)などを設定する操作スイッチである。なお、通信モードが電波通信の場合には、他のストロボ装置と双方向通が可能であり、光通信の場合には、マスターストロボからスレーブストロボへの片方向通信が可能であるものとする。422はストロボの動作モードなどを表示するLCDなどの表示部である。430はストロボ装置400の各部を制御するとともに、カメラMPU50との通信を制御するストロボMPUである。
【0039】
460は無線通信用のRF(RadioFreqency)モジュールで、例えば2.4GHZ帯(IMSバンド)の送受信処理を行うZigBee(商標)やBlueTooth(登録商標)などの無線プロトコルを処理するRFチップで構成されている。461は電波の送受信を行うためのアンテナであり、RFモジュール460と合わせて電波通信部として機能する。
【0040】
462は光通信に用いられる受光回路、463はフォトダイオードであり、マスター、スレーブ間の通信を光通信で行う場合のインターフェース回路である。この受光回路462、フォトダイオード463及び発光部410とを合わせて光通信部として機能する。
【0041】
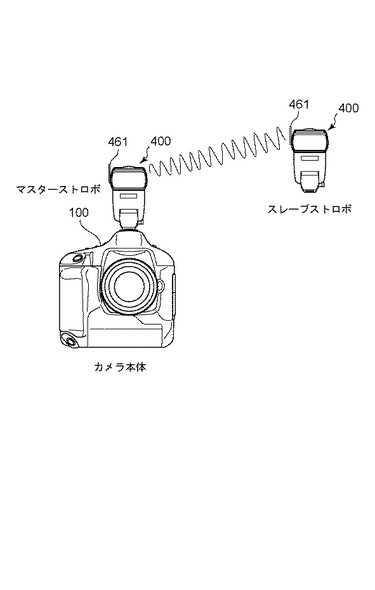
次に図3は本実施の形態における、撮像装置と発光装置とが電波による無線通信を行うカメラシステムを示す図である。なお、図1及び図2と同じ部材には同じ記号を付与している。
【0042】
100はカメラ本体で、ストロボ装置400をマスターモードに設定してカメラ本体100に装着している。このカメラシステムでは、マスターモードに設定したストロボ装置をマスターストロボとする。一方、マスターストロボと同じ構成のストロボ装置でスレーブモードに設定したものをスレーブストロボとして、カメラから離れた位置に配置している。なお、図3では、スレーブストロボとしてストロボ装置を1台のみ記載しているが、スレーブストロボが複数あってもかまわない。
【0043】
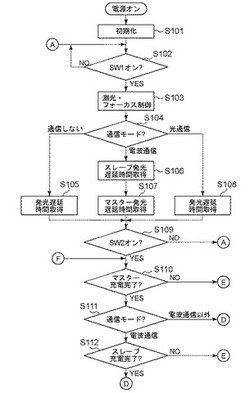
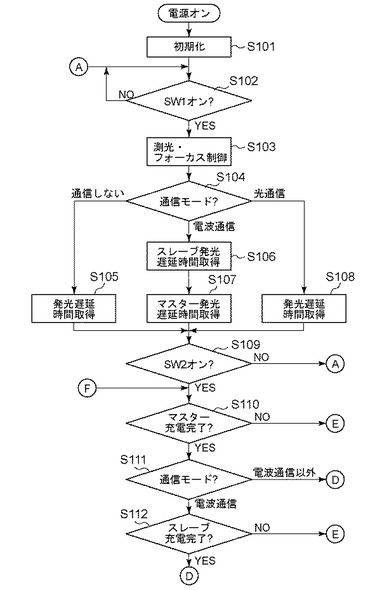
次に図4及び図5を用いて、本実施の形態におけるカメラ本体100の動作フローを説明する。
【0044】
不図示の電源スイッチにより電源が投入されると、カメラMPU50はフラグや制御変数等を初期化する(ステップS101)。
【0045】
次に、カメラMPU50はレリーズスイッチSW1の状態を確認し(ステップS102)、レリーズスイッチSW1がオンされていればステップS103へと進む。
【0046】
ステップS103では、被写体の輝度を測定し、撮影のための絞り値とシャッター速度を公知の方法で演算すると共に、被写体のデフォーカス状態を検出する。検出されたデフォーカス状態はカメラMPU50からレンズMPU206に送られ、フォーカス制御回路211を介してフォーカシングレンズ201を駆動させ被写体に対してフォーカスを合わせる。
【0047】
次にカメラMPU50は、カメラに装着されているマスター設定されたマスターストロボの通信モードを判別する(ステップS104)。
【0048】
他のストロボ装置と通信しない設定の場合は、通常発光モード(カメラ本体100に装着されたマスターストロボのみが発光するモード)であるので、カメラMPU50は通常発光モードでの発光遅延時間をマスターストロボから取得する(ステップS105)。
【0049】
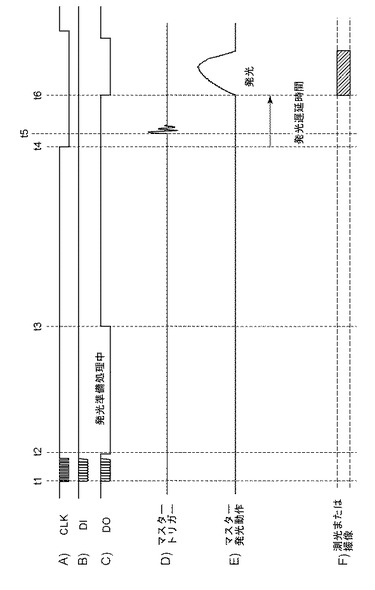
ここで、通常発光モード(他のストロボ装置と通信しない設定の場合)における発光遅延時間を図6を用いて説明する。
【0050】
図6において、A)、B)、C)はマスターストロボとカメラ本体100の間のシリアル通信ライン信号であり、A)のCLKは同期クロック、B)のDIはカメラからストロボへの通信データ、C)のDOはストロボからカメラへの通信データを示している。D)は発光部410を発光させるためのトリガー回路411が発生させる数千ボルトのトリガー電圧波形を示している。E)は通常発光モードにおけるマスターストロボの発光部410の発光波形を示している。F)はカメラ本体100の動作を示し、マスターストロボをプリ発光させて被写体反射光を測光する状態、または、マスターストロボを本発光させて撮像を行う状態を示している。
【0051】
図6において、時刻t1でカメラ本体100からマスターストロボへシリアル通信により、プリ発光または本発光、閃光発光またはFP発光などの発光モードや発光量、発光時間等の発光制御情報が伝えられる。
【0052】
時刻t2でシリアル通信が終了すると、ストロボMPU430は、発光制御情報に基づく発光準備処理を行っている間はC)のDOラインをLoレベルに設定し、発光準備処理中であることをカメラ本体100に伝える。
【0053】
そして、時刻t3にて発光準備処理が終了してストロボMPU430によりDOラインがHiレベルに設定されると、カメラMPU50は時刻t4でCLK端子をLoレベルに設定してマスターストロボに対して発光開始指示を出力する。
【0054】
一方、ストロボMPU430はCLK端子がLoレベルになったのを検知すると、時刻t5にて発光制御回路412をオンに設定し、トリガー回路411を動作させて発光トリガー電圧を発生させる。
【0055】
しかしながら、発光部であるキセノン管は時刻t5でトリガー電圧が与えられてもすぐには発光を開始せずに、トリガー電圧が発生してから約50マイクロ秒程度経過した後(時刻t6)に発光が開始される。
【0056】
したがって、カメラ本体100が発光開始指示を時刻t4で行っても、ストロボMPU430内のソフトウエアの処理時間や、発光遅れなどが加算されて実際の発光は時刻t6に開始されることになる。このような、発光開始指示が行われてから実際に発光開始するまでの経過時間が発光遅延時間であり、この通常発光モードでは約70マイクロ秒程度の時間となる。
【0057】
通常発光モードにおける発光遅延時間は、ストロボ装置ごとにほぼ一定であると想定される。そのため、ストロボ装置400内に想定される発光遅延時間を予め記憶しておき、ステップS105では、ストロボMPU430が記憶しておいた発光遅延時間をカメラ本体100へ伝えることで、カメラMPU50は発光遅延時間を取得している。なお、ストロボ装置の使用状況に応じて発光遅延時間が変更してしまう場合には、ストロボMPU430が使用状況に応じて記憶している発光遅延時間を補正してカメラ本体100へ伝えるようにしてもよい。
【0058】
ステップS104において通信モードが電波通信である場合は、カメラMPU50はマスターストロボを介して電波通信にてスレーブストロボに発光遅延時間の送信をリクエストする。このとき、スレーブストロボは送信リクエストに応じて、電波通信にてマスターストロボに発光遅延時間を送信する。このようにして、スレーブストロボに起因する発光遅延時間(第1の発光遅延時間)を取得する(ステップS106)。
【0059】
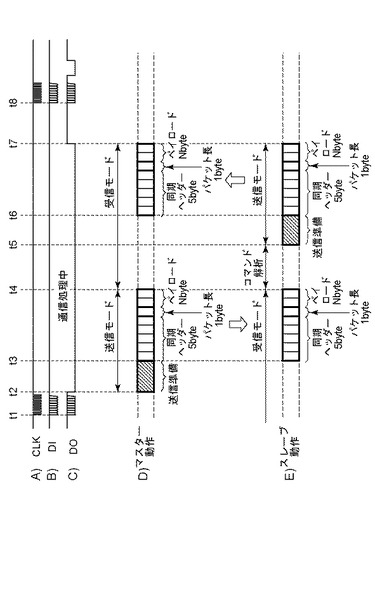
ここで、ステップS106における、スレーブストロボに起因する発光遅延時間を取得する際の、電波によるマスターとスレーブとの間の通信を図7を用いて説明する。
【0060】
図7において、A)、B)、C)は図6で示したA)、B)、C)と対応している。D)はマスターストロボのRFモジュール460の動作を模式的に示したものであり、E)はスレーブストロボのRFモジュール460の動作を模式的に示したものである。
【0061】
図7において、時刻t1でカメラ本体100からマスターストロボへと、スレーブストロボに起因する発光遅延時間を問い合わせるシリアル通信が行われる。
【0062】
時刻t2でシリアル通信が終了すると、マスターストロボのストロボMPU430は、スレーブストロボとの通信処理中である事を示すために、C)のDOラインをLoレベルに設定する。
【0063】
この通信処理では、D)で示すように、送信準備期間として、RFモジュール460内の不図示のRF送信回路に電源を投入して、不図示の水晶発振子およびRF送信回路の動作安定待ちを行う。
【0064】
続いて時刻t3にて、マスターストロボからスレーブストロボに起因する発光遅延時間の送信をリクエストする電波の送信が開始され、5バイトの同期ヘッダー、1バイトのパケット長データ、nバイトのペイロードデータが送信される。
【0065】
同期ヘッダーは本実施の形態では5バイトで構成され、最初の4バイトはプリアンブルと呼ばれ、データ「0」がパックされる。5バイト目はSFD(Start of frame delimiter)と呼ばれ、例えば16進「A7」がパックされ、プリアンブルの終了と送信データの開始を示す。次のパケット長データは続くペイロードの長さを示し、ペイロードデータは実際に送信するデータがパックされている。
【0066】
この送信された電波は、送信された時刻とほぼ同時刻にスレーブストロボのRFモジュール460で受信される。
【0067】
時刻t4にてマスターストロボの送信動作が終了すると、スレーブストロボのストロボMPU430は受信したペイロードデータから、スレーブストロボに起因する発光遅延時間を送信するコマンドであることを解析する。このコマンド解析には所定の時間を要し、図7のE)ではコマンド解析期間として示している。
【0068】
コマンド解析が終了すると、スレーブストロボからマスターストロボに発光遅延時間に関するデータを送信するために、スレーブストロボのストロボMPU430は時刻t5でRFモジュール460を送信モードに設定する。そして、前述のマスター送信と同様にして、ペイロードデータにスレーブストロボに起因する発光遅延時間パックして送信する。
【0069】
一方、マスターストロボのストロボMPU430は、時刻t4で送信データの終了後、スレーブストロボから送信される発光遅延時間に関するデータを受信するために、RFモジュール460を受信モードに切り替える。
【0070】
その後、マスターストロボのストロボMPU430は、時刻t6からt7の区間で、スレーブストロボからの発光遅延時間に関するデータを受信し、受信したペイロードデータの中のスレーブストロボに起因する発光遅延時間を読み出す。
【0071】
そして、マスターストロボのストロボMPU430は、C)のDOのデータとして出力される不図示のシリアル通信バッファーにそのデータを書き込み、DOラインをHiレベルに設定して通信処理が終了したことをカメラ本体100へ伝える。
【0072】
通信処理が終了したことが伝えられた後に、カメラMPU50が時刻t8でシリアル通信を行うと、マスターストロボのストロボMPU430により前述のシリアル通信バッファーの中のデータがDOラインに出力される。これにより、カメラMPU50はマスターストロボを介してスレーブストロボに起因する発光遅延時間を取得することができる。
【0073】
次にステップS107で、カメラMPU50は前述のシリアル通信でマスターストロボに対してマスターストロボに起因する発光遅延時間(第2の発光遅延時間)を問い合わせ、同様にしてシリアル通信にてマスターストロボに起因する発光遅延時間を取得する。
【0074】
通信モードが電波通信である場合における、マスターストロボに起因する発光遅延時間及びスレーブストロボに起因する発光遅延時間を含めた発光遅延時間を図8を用いて説明する。
【0075】
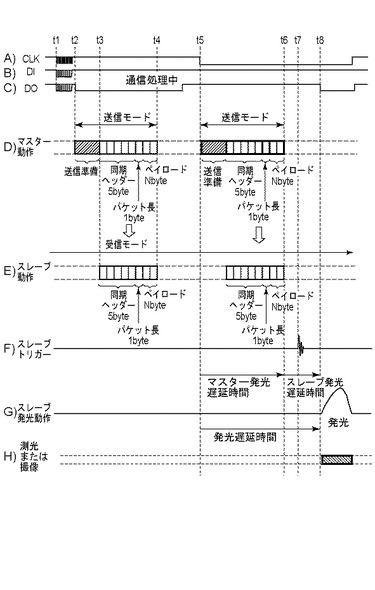
図8においてA)、B)、C)は図6及び図7で示したA)、B)、C)と対応している。また、D)、E)は図7で示したD)、E)と対応しており、F)、G)、H)は図6で示したD)、E)、F)とそれぞれ対応している。
【0076】
図8において、時刻t1でカメラ本体100からマスターストロボへシリアル通信により、スレーブストロボに対する、プリ発光または本発光、閃光発光またはFP発光などの発光モードや発光量、発光時間等の発光制御情報が伝えられる。
【0077】
時刻t2でシリアル通信が終了すると、マスターストロボのストロボMPU430は、発光制御情報に基づく送信処理を行っている間はC)のDOラインをLoレベルに設定し、送信処理中であることをカメラ本体100に伝える。
【0078】
同時に、図7のマスター送信動作と同様にして、ペイロードデータにスレーブストロボに対する発光制御情報に関するデータをパックして、マスターストロボからスレーブストロボに電波が送信される。
【0079】
スレーブストロボは、送信された時刻とほぼ同時刻にRFモジュール460を介してマスターストロボからの発光制御情報に関するデータを受信し、ストロボMPU430によりコマンド解析を行う。
【0080】
次に、カメラMPU50は時刻t5でCLK端子をLoレベルに設定しスレーブストロボに対する発光開始指示をマスターストロボへ出力する。
【0081】
この時、マスターストロボのストロボMPU430は時刻t5にてCLK端子がLoレベルになったのを検知すると、発光開始指示コマンドをペイロードデータにパックした発光開始指示を表すデータである電波をマスターストロボからスレーブストロボへ送信する。
【0082】
スレーブストロボはRFモジュール460を介して発光開始指示を表すデータを受信し、時刻t6にて発光制御回路412をオン状態に設定し、時刻t7にトリガー回路411を動作させて発光トリガー電圧を発生させる。
【0083】
そして、トリガー電圧が発生させてから約50マイクロ秒程度経過した後(時刻t8)に、スレーブストロボの発光部410による発光が開始される。
【0084】
したがって、カメラ本体100が発光開始指示を時刻t5で行っても、マスターストロボの送信準備期間、電波送信時間、スレーブストロボのストロボMPU430内のソフトウエアの処理時間や、発光遅れなどが加算されて実際の発光は時刻t8に開始される。
【0085】
ここで、時刻t5から時刻t6まで、すなわち、カメラMPU50が発光開始指示を出力してからマスターストロボが発光開始指示を表すデータを送信し終わるまでに要する時間がマスターストロボに起因する発光遅延時間に相当する。一方、時刻t6からt8まで、すなわち、スレーブストロボがマスターストロボからの発光開始指示を表すデータを受信し終わってから発光を開始するまでに要する時間がスレーブストロボに起因する発光遅延時間に相当する。
【0086】
なお、時刻t5から時刻t6までのマスターストロボに起因する発光遅延時間は、電波通信の通信バイト数や通信速度によって変化する。
【0087】
例えば、通信速度が250kbps(1秒当たり250000ビット)の場合は、電波送信に要する時間は1バイト当たり4マイクロ秒*8ビット=32マイクロ秒である。そのため、本実施の形態の様に、同期ヘッダー5バイト、パケット長データ1バイト、ペイロードデータ2バイトの場合は、合計32マイクロ秒*8バイト=256マイクロ秒かかる。
【0088】
したがって、マスターストロボに起因する発光遅延時間は、前述の送信準備期間と電波送信における通信速度及び通信バイト数で決定される。通信速度が250kbpsの場合のマスターストロボに起因する発光遅延時間は、具体的には、送信準備期間=120マイクロ秒、電波送信時間=256マイクロ秒で、合計376マイクロ秒となる。
【0089】
また、通信速度が1Mbps(1秒当たり1000000ビット)の場合は、電波送信に要する時間は1バイト当たり1マイクロ秒*8ビット=8マイクロ秒である。そのため、本実施形態の様に、同期ヘッダー5バイト、パケット長データ1バイト、ペイロードデータ2バイトの場合は、合計8マイクロ秒*8バイト=64マイクロ秒かかる。したがって、通信速度が1Mbpsの場合のマスターストロボに起因する発光遅延時間は、送信準備時間の120マイクロ秒と合計して184マイクロ秒となる。
【0090】
このようにして、マスターストロボに起因する発光遅延時間は、通信速度及び通信バイト数に応じて変化し、通信速度及び通信バイト数に基づいてマスターストロボのストロボMPU430により予め演算することができる。ステップS107では、マスターストロボのストロボMPU430がカメラMPU50からの問い合わせに対して、演算した発光遅延時間をシリアル通信にて伝えることで、カメラMPU50はマスターストロボに起因する発光遅延時間を取得している。なお、ステップS107では、カメラMPU50がマスターストロボから発光開始指示を表すデータを送信する際の通信速度及び通信バイト数を取得し、取得した通信速度及び通信バイト数に基づいてマスターストロボに起因する発光遅延時間を演算してもよい。
【0091】
一方、スレーブストロボに起因する発光遅延時間は、マスターストロボからの発光開始指示コマンドのコマンド解析に要する時間とトリガー電圧が発生してから発光開始するまでの時間で決定される。具体的には、本実施形態では、コマンド解析に要する時間=10マイクロ秒(図8のt6〜t7)、トリガー電圧が発生してから発光開始するまでの時間=50マイクロ秒(図8のt7〜t8)の合計60マイクロ秒かかる。なお、スレーブストロボに起因する発光遅延時間は、ストロボごとにほぼ一定であると想定される。そのため、ストロボ装置400内に想定される発光遅延時間を予め記憶しておき、ステップS106では、カメラMPU50はスレーブストロボのストロボMPU430が記憶しておいた発光遅延時間をマスターストロボを介して取得している。また、ストロボ装置の使用状況に応じて発光遅延時間が変更してしまう場合には、スレーブストロボのストロボMPU430が使用状況に応じて記憶している発光遅延時間を補正してマスターストロボへ伝えるようにしてもよい。
【0092】
ステップS104において通信モードが光通信である場合は、ステップS108にてカメラMPU50は、マスターストロボより光通信を行う場合のマスターストロボに起因する発光遅延時間をシリアル通信にて取得する。
【0093】
通信モードが光通信である場合における、発光遅延時間を図9を用いて説明する。
【0094】
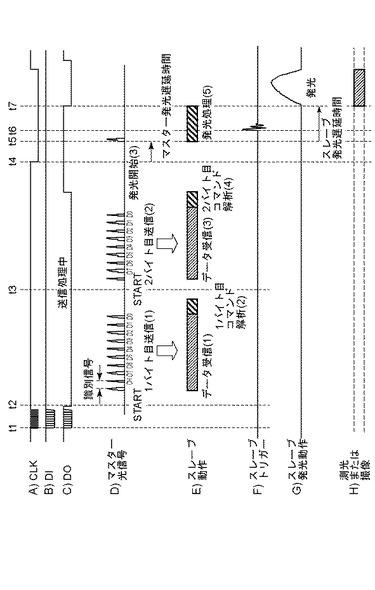
図9においてA)、B)、C)は図6ないし図8で示したA)、B)、C)と対応している。また、D)はマスターストロボの発光部410の発光波形であり、微小な光パルスの組み合わせでデータを伝達する。1バイト目の最初の2ビットの光パルスはチャネル識別信号であり、続く8ビットの光パルスの所定の間隔でデータが1のときのみ光パルスが発光される。2バイト目以降は、最初の1ビット目がスタートパルスであり、続く8ビットの光パルスで構成される。本実施の形態では、送信データが2バイトであり、時刻t5の発光開始パルス(3)がスレーブストロボへの発光開始指示信号となる。
【0095】
また、E)はスレーブストロボでのマスター光信号の受信、コマンド解析と発光処理タイミングを示しており、前述のマスター光信号の所定パルス数の光パルスをデータ受信区間(1)で受信すると、受信したデータを1バイト目コマンド解析区間(2)で解析する。続くデータ受信区間(3)で2バイト目のデータを受信し、2バイト目コマンド解析区間(4)でコマンド解析を行い、発光開始パルス(3)を受信すると発光処理区間(5)で発光準備を行い発光する。また、G)、H)は図8で示したG)、H)とそれぞれ対応している。
【0096】
図9において、時刻t1でカメラ本体100からマスターストロボへシリアル通信により、スレーブストロボに対する、プリ発光または本発光、閃光発光またはFP発光などの発光モードや発光量、発光時間等の発光制御情報が伝えられる。
【0097】
時刻t2でシリアル通信が終了すると、マスターストロボのストロボMPU430は、発光制御情報に基づく送信処理を行っている間C)のDOラインをLoレベルに設定し、送信処理中であることをカメラ本体100に伝える。
【0098】
同時に、カメラ本体100から伝えられた発光制御情報に関する発光コマンドを2バイトデータとして、マスターストロボの発光部410をパルス発光させてスレーブストロボへ送信する。
【0099】
スレーブストロボは、送信された時刻とほぼ同時刻に受光部を介してマスターストロボからの発光制御情報に関するデータを受信し、コマンド解析を行う。
【0100】
次に、カメラMPU50は時刻t4でCLK端子をLoレベルに設定しスレーブストロボに対する発光開始指示を行う。
【0101】
そして、マスターストロボのストロボMPU430はCLK端子がLoレベルになったのを受けて、カメラ本体100からの発光開始指示を光パルスとしてスレーブストロボへ送信する。
【0102】
この発光開始指示が行われる時刻t4から発光開始指示の光パルスが送信される時刻t5までの遅延時間は、マスターストロボに起因する発光遅延時間である。このマスターストロボに起因する発光遅延時間には、カメラ本体100からのスレーブストロボに対する発光開始指示を受けてからトリガー電圧を発生させるまでの時間及びトリガー電圧を発生させてから実際に発光開始するまでの遅延時間が含まれている。スレーブストロボは受光部を介して発光開始指示に関する光パルスを受信し、時刻t5にて発光制御回路412をオン状態に設定し、トリガー回路411を動作させて発光トリガー電圧を時刻t6にて発生させる。
【0103】
そして、トリガー電圧を発生させてから約50マイクロ秒程度経過した後(時刻t7)に、スレーブストロボによる発光が開始される。
【0104】
したがって、カメラ本体100が発光開始指示を時刻t4で行っても、マスターストロボに起因する発光遅延時間とスレーブストロボに起因する発光遅延時間が加算されて、実際の発光は時刻t7に開始される。
【0105】
なお、本実施形態のおける光通信は、マスターストロボからスレーブストロボへの片方向通信であるため、電波通信のようにスレーブストロボからスレーブストロボに起因する発光遅延時間を取得することができない。
【0106】
しかしながら、スレーブストロボに起因する発光遅延時間は、発光開始指示に関する光パルスを受けてから発光を行うまでの遅延時間のみであり、マスターストロボに起因する発光遅延時間とほぼ等価であると考えられる。そのため、本実施形態では、光通信を行う場合の発光遅延時間は、マスターストロボに起因する発光遅延時間の2倍としている。
【0107】
次に、図4に戻り続くステップS109では、カメラMPU50はレリーズスイッチSW2の状態を確認し、レリーズスイッチSW2がオフの場合はステップS102に戻り、レリーズスイッチSW2がオンされていればステップS110へと進む。ステップS110では、カメラMPU50は、マスターストロボのメインコンデンサ403が所定の電圧まで充電され、発光可能であるか否かを確認する。なお、メインコンデンサ403が所定の電圧まで充電されたタイミングで、マスターストロボのストロボMPU430は、所定の電圧まで充電されたことを前述したシリアル通信によりカメラ本体100に伝える。
【0108】
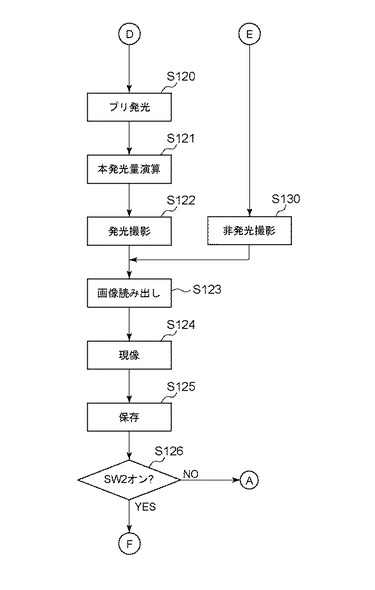
マスターストロボが発光可能であればステップS111へと進み、発光可能でない場合はマスターストロボを発光させても所望の光量が得られないため、ステップS130へと進みストロボ発光をさせずに撮像(非発光撮影)を行う。
【0109】
なお、マスターストロボで発光を行わない設定の場合には、ステップS110は省略してもよい。
【0110】
次に、ステップS111では、カメラMPU50は、マスターストロボの通信モードを判別し、電波通信が設定されている場合はステップS112へと進み、その他のモードが設定されている場合はステップS120へと進む。なお、通信モードとして電波通信が設定されている場合にステップS112へと進むのは、カメラMPU50が双方向通信によりスレーブストロボのメインコンデンサ403の充電電圧を把握することができるからである。一方、他のストロボ装置と通信しない設定の場合にステップS120へと進むのは、スレーブストロボを使用しないのでスレーブストロボの充電電圧を把握しなくてよいからである。また、光通信が設定されている場合にステップS120へと進むのは、光通信はマスターストロボからスレーブストロボへの片方向通信であるため、スレーブストロボの充電電圧を把握できないからである。
【0111】
ステップS112では、マスターストロボのメインコンデンサ403が所定の電圧まで充電され、発光可能であるか否かを確認する。なお、メインコンデンサ403が所定の電圧まで充電されたタイミングで、スレーブストロボのストロボMPU430は、所定の電圧まで充電されたことを前述した電波通信によりマスターストロボに伝える。そして、マスターストロボからシリアル通信により、スレーブストロボが所定の電圧まで充電されたことがカメラ本体100に伝えられる。スレーブストロボが発光可能であればステップS120へと進み、発光可能でない場合はスレーブストロボを発光させても所望の光量が得られないため、ステップS130へと進む。
【0112】
ステップS120では、本発光に先立ってマスターストロボ、スレーブストロボによりプリ発光を行う。なお、通信モードが通信を行わない設定になっている場合は、マスターストロボによるプリ発光のみを行い、その他の通信モードでは、マスターストロボ及びスレーブストロボの一方あるいは両方でプリ発光を行う。両方でプリ発光を行う場合、マスターストロボ及びスレーブストロボのプリ発光を異なるタイミングで行い、そのときのそれぞれの測光結果を用いて後述する本発光量演算によりそれぞれの本発光量を演算する。また、プリ発光を行う際は、図6、図8、図9で説明した様に、カメラMPU50は、通信モードに応じた発光遅延時間に基づいて、プリ発光と同期するように測光センサー7によるプリ発光時の測光の開始タイミングを制御する。具体的には、カメラMPU50が発光開始指示を行ってから発光遅延時間に基づいて設定される所定時間が経過してから、測光センサー7による測光を開始させるので、測光とプリ発光とを同期させることができる。
【0113】
次に、ステップS121では、ステップS120で取得したプリ発光時の測光結果を用いて、公知の演算方法で本発光量を演算する。
【0114】
ステップS122では、ステップS121にて演算された本発光量にて、本発光を行う。この際、スレーブストロボは、カメラ本体100から電波通信あるいは光通信により送信された発光制御情報によりステップS121にて演算された本発光量を取得し、取得した本発光量となるように発行制御を行う。
【0115】
また、ステップS122において、カメラMPU50は、ステップS120と同様に、通信モードに応じた発光遅延時間に基づいて、本発光と同期するように撮像の開始タイミングを制御する。具体的には、カメラMPU50が発光開始指示を行ってから発光遅延時間に基づいて設定される所定時間が経過してから、撮像を開始させるので、撮像と本発光とを同期させることができる。
【0116】
続いて、撮像した画像を読み出し(ステップS123)、公知の方法にてデジタル現像を行い(センサー出力をJPEGなどのフォーマットに圧縮変換)(ステップS124)、外部メモリ56に現像された撮影画像を書き込み保存する(ステップS125)。
【0117】
次に、ステップS126では、カメラMPU50はレリーズスイッチSW2の状態を確認し、レリーズスイッチSW2がオンされていればステップS110へと戻り連続して撮影を行う。一方、レリーズスイッチSW2がオフの場合はステップS102に戻り撮影待機状態となる。
【0118】
以上のように、スレーブストロボと電波による無線通信を行う場合でも、マスターストロボ及びスレーブストロボに起因する発光遅延時間をそれぞれ取得することで、スレーブストロボの発光と当該発光に対応するカメラの動作とを同期させることができる。
【0119】
また、電波による無線通信を行う場合に、電波送信における通信速度及び通信バイト数に基づいて発光遅延時間を演算することで、スレーブストロボの発光と当該発光に対応するカメラの動作とをより正確に同期させることができる。
【0120】
また、発光開始指示を電波通信を介して行う場合と光通信を介して行う場合とでカメラMPU50がカメラの動作の開始タイミングを異ならせるので、いずれの通信モードでもスレーブストロボの発光と当該発光に対応するカメラの動作とを同期させることができる。
【0121】
また、マスターストロボが電波による無線通信のみが可能な場合であっても、上述したように電波による無線通信における発光遅延時間を取得することで、スレーブストロボの発光と当該発光に対応するカメラの動作とを同期させることができる。
【0122】
なお、本実施の形態では、カメラ本体に装着されたストロボ装置を介してスレーブストロボと電波による無線通信を行う構成であったが、電波通信部を備えたカメラが直接スレーブストロボと通信する構成であってもよい。あるいは、カメラ本体に電波通信装置を装着する構成であってもよい。
【0123】
また、本実施の形態では、カメラ本体に装着されたストロボ装置を介して光による無線通信を行う構成であったが、カメラ本体に内蔵されたストロボを介してスレーブストロボと通信してもよい。あるいは、カメラ本体に内蔵されたストロボとは異なる発光部を介してスレーブストロボと通信してもよい。
【0124】
また、本実施の形態では、キセノン管を発光させて光通信を行っているが、LEDなどのその他の光源を発光させて光通信を行っても構わない。
【符号の説明】
【0125】
50 カメラMPU
100 カメラ本体
400 ストロボ装置
410 発光部
430 ストロボMPU
460 RFモジュール
461 アンテナ
462 受光回路
463 フォトダイオード
【技術分野】
【0001】
本発明は、撮像装置と発光装置とが電波による無線通信を行う撮像装置、発光装置及びカメラシステムに関するものである。
【背景技術】
【0002】
近年、撮像装置と発光装置とを電波を利用した無線通信により接続するカメラシステムが開発されている。このカメラシステムでは、撮像装置は発光装置に対して発光の開始コマンドを電波によって送信し、発光装置はそのコマンドを受信して発光を開始する。
【0003】
しかし上記システムでは、障害物や他電波との干渉などの影響により使用環境によっては撮像装置の動作と無線接続された発光装置での発光とのタイミングを合わせることが困難な場合がある。
【0004】
そこで、例えば特許文献1では、ワイヤレス増灯システムのマスターから送信するパケットにタイミングデータを含ませ、撮影に関する処理の開始タイミングでパケットの送信状態を変更することで、リモート閃光装置の発光開始を指示する方法が提案されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−102337号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記システムでは、デジタル信号と電波との変調・復調期間等を含む遅延時間が発生するが、特許文献1では、電波送信側の変調期間、電波受信側の復調期間、送信側から受信側への電波受け渡し期間などは考慮されていない。そのため、カメラの動作とリモート閃光装置の発光とを正確に同期させることができない。
【0007】
本発明は、上記課題を鑑みてなされたものであり、撮像装置と発光装置とで電波による無線通信を行う場合であっても、送信系、伝送系、受信系の遅延時間を考慮し発光装置の発光と当該発光に対応する撮像装置の動作とを同期させることを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明に係る撮像装置は、電波通信手段を介して発光装置と電波による通信を行う撮像装置であって、前記発光装置に対する発光開始指示を前記電波通信手段へ出力する発光開始指示手段と、前記発光装置が前記電波通信手段からの前記発光開始指示を表すデータを受信し終わってから発光を開始するまでに要する第1の発光遅延時間を取得する取得手段と、前記取得手段により取得された第1の発光遅延時間と、前記発光開始指示手段が前記発光開始指示を出力してから前記電波通信手段が前記発光開始指示を表すデータを送信し終わるまでに要する第2の発光遅延時間とに基づいて、前記発光開始指示にしたがって行なわれる発光に対応する前記撮像装置の動作の開始タイミングを制御する制御手段と、を有することを特徴とする。
【0009】
また、上記目的を達成するために、本発明に係る発光装置は、他の発光装置と電波による通信を行う発光装置であって、撮像装置からの前記他の発光装置に対する発光開始指示を検知する検知手段と、前記検知手段により検知された前記発光開始指示に基づく発光開始指示を表すデータを前記他の発光装置へ送信する電波通信手段と、前記他の発光装置が前記電波通信手段からの前記発光開始指示を表すデータを受信し終わってから発光を開始するまでに要する第1の発光遅延時間を取得する取得手段と、前記取得手段により取得された前記第1の発光遅延時間と、前記検知手段が前記発光開始指示を検知してから前記電波通信手段が前記発光開始指示を表すデータを送信し終わるまでに要する第2の発光遅延時間とを前記撮像装置へ出力する出力手段と、を有することを特徴とする。
【0010】
また、上記目的を達成するために、本発明に係るカメラシステムは、電波通信手段を介して撮像装置と発光装置とが電波による通信を行うカメラシステムであって、前記発光装置に対する発光開始指示を前記電波通信手段へ出力する発光開始指示手段と、前記発光装置が前記電波通信手段からの前記発光開始指示を表すデータを受信し終わってから発光を開始するまでに要する第1の発光遅延時間を取得する取得手段と、前記取得手段により取得された第1の発光遅延時間と、前記発光開始指示手段が前記発光開始指示を出力してから前記電波通信手段が前記発光開始指示を表すデータを送信し終わるまでに要する第2の発光遅延時間とに基づいて、前記発光開始指示にしたがって行なわれる発光に対応する前記撮像装置の動作の開始タイミングを制御する制御手段と、を有することを特徴とする。
【発明の効果】
【0011】
本発明によれば、撮像装置と発光装置とで電波による無線通信を行う場合であっても、送信系、伝送系、受信系の遅延時間を考慮し発光装置の発光と当該発光に対応する撮像装置の動作とを同期させることができる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施の形態における、撮像装置としてのカメラの構成を示すブロック図である。
【図2】本発明の実施の形態における、発光装置としてのストロボ装置の電気的構成を示すブロック図である。
【図3】本発明の実施の形態における、撮像装置と発光装置とが電波による無線通信を行うカメラシステムを示す図である。
【図4】カメラ本体での主な動作を示すフローチャートである。
【図5】カメラ本体での主な動作を示すフローチャートである。
【図6】通常発光モードの発光タイミングを示す図である。
【図7】電波による無線通信の通信タイミングを示す図である。
【図8】電波による無線通信の発光タイミングを示す図である。
【図9】光による無線通信の発光タイミングを示す図である。
【発明を実施するための形態】
【0013】
図1は、本発明の実施の形態における、撮像装置としてのカメラの構成を示したブロック図であり、100はカメラ本体である。
【0014】
1は主ミラーであり、ファインダー観察状態では撮影光路内に斜設され、撮影状態では撮影光路外に退避する。また、主ミラー1はハーフミラーとなっており、撮影光路内に斜設されているときは被写体からの光線の約半分を透過させる。2はピント板であり、後述の交換レンズ200で結像された被写体像が投影される。
【0015】
3はサブミラーであり、主ミラー1とともに、ファインダー観察状態では撮影光路内に斜設され、撮影状態では撮影光路外に退避する。このサブミラー3は、斜設された主ミラー1を透過した光線を下方に折り曲げて、後述の焦点検出ユニットの方に導くものである。4はファインダー光路変更用のペンタプリズム、5はファインダーであり、撮影者はこのファインダーからピント板2を観察することで、撮像画面を観察することができる。
【0016】
6と7は撮像画面内の被写体輝度を測定するための結像レンズと測光センサーである。8は公知の位相差方式の焦点検出ユニットである。9はフォーカルプレンシャッターであり、14は、CMOS等の撮像素子である。16は撮像素子14のアナログ信号出力をデジタル信号に変換するA/D変換器である。
【0017】
20は画像処理回路であり、A/D変換器16からのデータ或いはメモリ制御回路22からのデータに対して所定の画素補間処理などを行う。22はメモリ制御回路であり、A/D変換器16、画像処理回路20、画像表示メモリ24、D/A変換器26、メモリ30を制御する。
【0018】
26はD/A変換器、28はTFT LCD等から成る画像表示部であり、画像表示メモリ24に書き込まれた表示用の画像データはD/A変換器26を介してカメラ本体背面の画像表示部28により表示される。また、この画像表示部28は、カメラ操作用の表示インターフェースも兼ねており、カメラの様々な動作状態を表示する。
【0019】
30は撮影した静止画像や動画像を格納するためのメモリであり、所定枚数の静止画像や所定時間の動画像を格納するのに十分な記憶量を備えている。また、メモリ30はカメラMPU50の作業領域としても使用する。
【0020】
40はフォーカルプレンシャッター9を制御するシャッター制御部であり、41は主ミラー1をアップ、ダウンさせるためのモータと駆動回路からなるミラー制御部である。
【0021】
50はカメラ本体100全体を制御するカメラMPU、52はカメラMPU50の動作用の定数、変数、プログラム等を記憶するメモリである。56は電気的に消去・記録可能な不揮発性メモリであり、例えばEEPROM等が用いられる。
【0022】
60はモードダイアルスイッチで、撮影モード(マニュアル、絞り優先AE、シャッター優先AE、プログラムAE)の設定を切り換えることができる。62はレリーズスイッチSW1で、不図示のシャッターボタンの操作一段目でオンとなり、AF(オートフォーカス)処理、AE(自動露出)処理等の撮影準備動作の開始を指示する。
【0023】
64はレリーズスイッチSW2で、不図示のシャッターボタンの操作二段目でオンとなり、撮像素子14から読み出された信号をA/D変換器16、メモリ制御回路22を介してメモリ30に画像データとして書き込む露光処理等の撮影動作の開始を指示する。
【0024】
70は各種ボタンやタッチパネル等からなる操作部である。80は電源制御部で、DC−DCコンバータにより各種制御回路に必要な電圧を供給する。120はメモリカードやハードディスク等の記録媒体である。
【0025】
399は後述の交換レンズ200とカメラMPU50との通信を行う通信線であり、499は後述のストロボ装置400とカメラMPU50との通信を行う通信線である。
【0026】
次に交換レンズ200の説明をする。
【0027】
201は撮像素子14に結像される被写体像のフォーカス調整を行う為のフォーカシングレンズである。202はフォーカシングレンズ201を光軸方向に駆動して、フォーカスを合わせるためのフォーカス駆動アクチュエータで、211はレンズMPU206からの指令に基づき、フォーカス駆動アクチュエータ202を制御するフォーカス制御回路である。
【0028】
203はフォーカシングレンズ201の位置から被写体距離を検出する為のエンコーダからなる被写体距離検出部、204はカメラ本体100へ入射する光量を調整する為の絞り、250は絞り駆動アクチュエータである。
【0029】
205はレンズMPU206からの指令に基づき、絞り駆動アクチュエータ250を制御する絞り制御回路である。
【0030】
207は焦点距離調整を行うためのズーミングレンズ、208はズーミングレンズ207を光軸方向に駆動して、電気的に焦点距離調節を行うためのズーム駆動アクチュエータで、212はズーム駆動アクチュエータ208を制御するズーム制御回路である。
【0031】
206は前述のフォーカス駆動や絞り駆動などを制御するとともに、カメラMPU50との通信を制御するレンズMPUである。
【0032】
また、交換レンズ200はレンズマウント209を介して、着脱可能にカメラ本体100に装着される。また、電気的にはシリアル通信線と電源からなるコネクタ210でカメラ本体に接続される。
【0033】
400はカメラに着脱可能に装着される発光装置としてのストロボ装置であり、カメラ本体100から離れた位置に配置されたスレーブストロボと電波あるいは光を用いて無線通信を行う。
【0034】
次に図2を用いてストロボ装置400の回路構成を説明する。
【0035】
ストロボ装置400は、カメラ本体100に接点群420にて電気的に接続される。401は電源電池である。402はDC−DCコンバータであり、電池電圧を数100Vに昇圧する。403は発光エネルギーを蓄積するメインコンデンサである。404、405は抵抗であり、メインコンデンサ403の電圧を所定比に分圧する。
【0036】
406は発光電流を制限するためのコイル、407は発光停止時に発生する逆起電圧を吸収するためのダイオード、410はXe(キセノン)管を用いた発光部である。411はトリガー発生回路、412はIGBTなどの発光制御回路である。
【0037】
413は発光制御用の受光センサーであるフォトダイオードであり、発光部410の光出力をモニタする。414は光量制御回路で、フォトダイオード413の光電流を増幅し、フォトダイオード413で受光した光が所定光量になると発光制御回路412の導通を制御することで、発光部410の発光量の調整を行う。
【0038】
421はストロボの動作モード(ノーマル、マスター、スレーブ)や他のストロボ装置との間で用いる通信モード(電波通信、光通信、通信しない)などを設定する操作スイッチである。なお、通信モードが電波通信の場合には、他のストロボ装置と双方向通が可能であり、光通信の場合には、マスターストロボからスレーブストロボへの片方向通信が可能であるものとする。422はストロボの動作モードなどを表示するLCDなどの表示部である。430はストロボ装置400の各部を制御するとともに、カメラMPU50との通信を制御するストロボMPUである。
【0039】
460は無線通信用のRF(RadioFreqency)モジュールで、例えば2.4GHZ帯(IMSバンド)の送受信処理を行うZigBee(商標)やBlueTooth(登録商標)などの無線プロトコルを処理するRFチップで構成されている。461は電波の送受信を行うためのアンテナであり、RFモジュール460と合わせて電波通信部として機能する。
【0040】
462は光通信に用いられる受光回路、463はフォトダイオードであり、マスター、スレーブ間の通信を光通信で行う場合のインターフェース回路である。この受光回路462、フォトダイオード463及び発光部410とを合わせて光通信部として機能する。
【0041】
次に図3は本実施の形態における、撮像装置と発光装置とが電波による無線通信を行うカメラシステムを示す図である。なお、図1及び図2と同じ部材には同じ記号を付与している。
【0042】
100はカメラ本体で、ストロボ装置400をマスターモードに設定してカメラ本体100に装着している。このカメラシステムでは、マスターモードに設定したストロボ装置をマスターストロボとする。一方、マスターストロボと同じ構成のストロボ装置でスレーブモードに設定したものをスレーブストロボとして、カメラから離れた位置に配置している。なお、図3では、スレーブストロボとしてストロボ装置を1台のみ記載しているが、スレーブストロボが複数あってもかまわない。
【0043】
次に図4及び図5を用いて、本実施の形態におけるカメラ本体100の動作フローを説明する。
【0044】
不図示の電源スイッチにより電源が投入されると、カメラMPU50はフラグや制御変数等を初期化する(ステップS101)。
【0045】
次に、カメラMPU50はレリーズスイッチSW1の状態を確認し(ステップS102)、レリーズスイッチSW1がオンされていればステップS103へと進む。
【0046】
ステップS103では、被写体の輝度を測定し、撮影のための絞り値とシャッター速度を公知の方法で演算すると共に、被写体のデフォーカス状態を検出する。検出されたデフォーカス状態はカメラMPU50からレンズMPU206に送られ、フォーカス制御回路211を介してフォーカシングレンズ201を駆動させ被写体に対してフォーカスを合わせる。
【0047】
次にカメラMPU50は、カメラに装着されているマスター設定されたマスターストロボの通信モードを判別する(ステップS104)。
【0048】
他のストロボ装置と通信しない設定の場合は、通常発光モード(カメラ本体100に装着されたマスターストロボのみが発光するモード)であるので、カメラMPU50は通常発光モードでの発光遅延時間をマスターストロボから取得する(ステップS105)。
【0049】
ここで、通常発光モード(他のストロボ装置と通信しない設定の場合)における発光遅延時間を図6を用いて説明する。
【0050】
図6において、A)、B)、C)はマスターストロボとカメラ本体100の間のシリアル通信ライン信号であり、A)のCLKは同期クロック、B)のDIはカメラからストロボへの通信データ、C)のDOはストロボからカメラへの通信データを示している。D)は発光部410を発光させるためのトリガー回路411が発生させる数千ボルトのトリガー電圧波形を示している。E)は通常発光モードにおけるマスターストロボの発光部410の発光波形を示している。F)はカメラ本体100の動作を示し、マスターストロボをプリ発光させて被写体反射光を測光する状態、または、マスターストロボを本発光させて撮像を行う状態を示している。
【0051】
図6において、時刻t1でカメラ本体100からマスターストロボへシリアル通信により、プリ発光または本発光、閃光発光またはFP発光などの発光モードや発光量、発光時間等の発光制御情報が伝えられる。
【0052】
時刻t2でシリアル通信が終了すると、ストロボMPU430は、発光制御情報に基づく発光準備処理を行っている間はC)のDOラインをLoレベルに設定し、発光準備処理中であることをカメラ本体100に伝える。
【0053】
そして、時刻t3にて発光準備処理が終了してストロボMPU430によりDOラインがHiレベルに設定されると、カメラMPU50は時刻t4でCLK端子をLoレベルに設定してマスターストロボに対して発光開始指示を出力する。
【0054】
一方、ストロボMPU430はCLK端子がLoレベルになったのを検知すると、時刻t5にて発光制御回路412をオンに設定し、トリガー回路411を動作させて発光トリガー電圧を発生させる。
【0055】
しかしながら、発光部であるキセノン管は時刻t5でトリガー電圧が与えられてもすぐには発光を開始せずに、トリガー電圧が発生してから約50マイクロ秒程度経過した後(時刻t6)に発光が開始される。
【0056】
したがって、カメラ本体100が発光開始指示を時刻t4で行っても、ストロボMPU430内のソフトウエアの処理時間や、発光遅れなどが加算されて実際の発光は時刻t6に開始されることになる。このような、発光開始指示が行われてから実際に発光開始するまでの経過時間が発光遅延時間であり、この通常発光モードでは約70マイクロ秒程度の時間となる。
【0057】
通常発光モードにおける発光遅延時間は、ストロボ装置ごとにほぼ一定であると想定される。そのため、ストロボ装置400内に想定される発光遅延時間を予め記憶しておき、ステップS105では、ストロボMPU430が記憶しておいた発光遅延時間をカメラ本体100へ伝えることで、カメラMPU50は発光遅延時間を取得している。なお、ストロボ装置の使用状況に応じて発光遅延時間が変更してしまう場合には、ストロボMPU430が使用状況に応じて記憶している発光遅延時間を補正してカメラ本体100へ伝えるようにしてもよい。
【0058】
ステップS104において通信モードが電波通信である場合は、カメラMPU50はマスターストロボを介して電波通信にてスレーブストロボに発光遅延時間の送信をリクエストする。このとき、スレーブストロボは送信リクエストに応じて、電波通信にてマスターストロボに発光遅延時間を送信する。このようにして、スレーブストロボに起因する発光遅延時間(第1の発光遅延時間)を取得する(ステップS106)。
【0059】
ここで、ステップS106における、スレーブストロボに起因する発光遅延時間を取得する際の、電波によるマスターとスレーブとの間の通信を図7を用いて説明する。
【0060】
図7において、A)、B)、C)は図6で示したA)、B)、C)と対応している。D)はマスターストロボのRFモジュール460の動作を模式的に示したものであり、E)はスレーブストロボのRFモジュール460の動作を模式的に示したものである。
【0061】
図7において、時刻t1でカメラ本体100からマスターストロボへと、スレーブストロボに起因する発光遅延時間を問い合わせるシリアル通信が行われる。
【0062】
時刻t2でシリアル通信が終了すると、マスターストロボのストロボMPU430は、スレーブストロボとの通信処理中である事を示すために、C)のDOラインをLoレベルに設定する。
【0063】
この通信処理では、D)で示すように、送信準備期間として、RFモジュール460内の不図示のRF送信回路に電源を投入して、不図示の水晶発振子およびRF送信回路の動作安定待ちを行う。
【0064】
続いて時刻t3にて、マスターストロボからスレーブストロボに起因する発光遅延時間の送信をリクエストする電波の送信が開始され、5バイトの同期ヘッダー、1バイトのパケット長データ、nバイトのペイロードデータが送信される。
【0065】
同期ヘッダーは本実施の形態では5バイトで構成され、最初の4バイトはプリアンブルと呼ばれ、データ「0」がパックされる。5バイト目はSFD(Start of frame delimiter)と呼ばれ、例えば16進「A7」がパックされ、プリアンブルの終了と送信データの開始を示す。次のパケット長データは続くペイロードの長さを示し、ペイロードデータは実際に送信するデータがパックされている。
【0066】
この送信された電波は、送信された時刻とほぼ同時刻にスレーブストロボのRFモジュール460で受信される。
【0067】
時刻t4にてマスターストロボの送信動作が終了すると、スレーブストロボのストロボMPU430は受信したペイロードデータから、スレーブストロボに起因する発光遅延時間を送信するコマンドであることを解析する。このコマンド解析には所定の時間を要し、図7のE)ではコマンド解析期間として示している。
【0068】
コマンド解析が終了すると、スレーブストロボからマスターストロボに発光遅延時間に関するデータを送信するために、スレーブストロボのストロボMPU430は時刻t5でRFモジュール460を送信モードに設定する。そして、前述のマスター送信と同様にして、ペイロードデータにスレーブストロボに起因する発光遅延時間パックして送信する。
【0069】
一方、マスターストロボのストロボMPU430は、時刻t4で送信データの終了後、スレーブストロボから送信される発光遅延時間に関するデータを受信するために、RFモジュール460を受信モードに切り替える。
【0070】
その後、マスターストロボのストロボMPU430は、時刻t6からt7の区間で、スレーブストロボからの発光遅延時間に関するデータを受信し、受信したペイロードデータの中のスレーブストロボに起因する発光遅延時間を読み出す。
【0071】
そして、マスターストロボのストロボMPU430は、C)のDOのデータとして出力される不図示のシリアル通信バッファーにそのデータを書き込み、DOラインをHiレベルに設定して通信処理が終了したことをカメラ本体100へ伝える。
【0072】
通信処理が終了したことが伝えられた後に、カメラMPU50が時刻t8でシリアル通信を行うと、マスターストロボのストロボMPU430により前述のシリアル通信バッファーの中のデータがDOラインに出力される。これにより、カメラMPU50はマスターストロボを介してスレーブストロボに起因する発光遅延時間を取得することができる。
【0073】
次にステップS107で、カメラMPU50は前述のシリアル通信でマスターストロボに対してマスターストロボに起因する発光遅延時間(第2の発光遅延時間)を問い合わせ、同様にしてシリアル通信にてマスターストロボに起因する発光遅延時間を取得する。
【0074】
通信モードが電波通信である場合における、マスターストロボに起因する発光遅延時間及びスレーブストロボに起因する発光遅延時間を含めた発光遅延時間を図8を用いて説明する。
【0075】
図8においてA)、B)、C)は図6及び図7で示したA)、B)、C)と対応している。また、D)、E)は図7で示したD)、E)と対応しており、F)、G)、H)は図6で示したD)、E)、F)とそれぞれ対応している。
【0076】
図8において、時刻t1でカメラ本体100からマスターストロボへシリアル通信により、スレーブストロボに対する、プリ発光または本発光、閃光発光またはFP発光などの発光モードや発光量、発光時間等の発光制御情報が伝えられる。
【0077】
時刻t2でシリアル通信が終了すると、マスターストロボのストロボMPU430は、発光制御情報に基づく送信処理を行っている間はC)のDOラインをLoレベルに設定し、送信処理中であることをカメラ本体100に伝える。
【0078】
同時に、図7のマスター送信動作と同様にして、ペイロードデータにスレーブストロボに対する発光制御情報に関するデータをパックして、マスターストロボからスレーブストロボに電波が送信される。
【0079】
スレーブストロボは、送信された時刻とほぼ同時刻にRFモジュール460を介してマスターストロボからの発光制御情報に関するデータを受信し、ストロボMPU430によりコマンド解析を行う。
【0080】
次に、カメラMPU50は時刻t5でCLK端子をLoレベルに設定しスレーブストロボに対する発光開始指示をマスターストロボへ出力する。
【0081】
この時、マスターストロボのストロボMPU430は時刻t5にてCLK端子がLoレベルになったのを検知すると、発光開始指示コマンドをペイロードデータにパックした発光開始指示を表すデータである電波をマスターストロボからスレーブストロボへ送信する。
【0082】
スレーブストロボはRFモジュール460を介して発光開始指示を表すデータを受信し、時刻t6にて発光制御回路412をオン状態に設定し、時刻t7にトリガー回路411を動作させて発光トリガー電圧を発生させる。
【0083】
そして、トリガー電圧が発生させてから約50マイクロ秒程度経過した後(時刻t8)に、スレーブストロボの発光部410による発光が開始される。
【0084】
したがって、カメラ本体100が発光開始指示を時刻t5で行っても、マスターストロボの送信準備期間、電波送信時間、スレーブストロボのストロボMPU430内のソフトウエアの処理時間や、発光遅れなどが加算されて実際の発光は時刻t8に開始される。
【0085】
ここで、時刻t5から時刻t6まで、すなわち、カメラMPU50が発光開始指示を出力してからマスターストロボが発光開始指示を表すデータを送信し終わるまでに要する時間がマスターストロボに起因する発光遅延時間に相当する。一方、時刻t6からt8まで、すなわち、スレーブストロボがマスターストロボからの発光開始指示を表すデータを受信し終わってから発光を開始するまでに要する時間がスレーブストロボに起因する発光遅延時間に相当する。
【0086】
なお、時刻t5から時刻t6までのマスターストロボに起因する発光遅延時間は、電波通信の通信バイト数や通信速度によって変化する。
【0087】
例えば、通信速度が250kbps(1秒当たり250000ビット)の場合は、電波送信に要する時間は1バイト当たり4マイクロ秒*8ビット=32マイクロ秒である。そのため、本実施の形態の様に、同期ヘッダー5バイト、パケット長データ1バイト、ペイロードデータ2バイトの場合は、合計32マイクロ秒*8バイト=256マイクロ秒かかる。
【0088】
したがって、マスターストロボに起因する発光遅延時間は、前述の送信準備期間と電波送信における通信速度及び通信バイト数で決定される。通信速度が250kbpsの場合のマスターストロボに起因する発光遅延時間は、具体的には、送信準備期間=120マイクロ秒、電波送信時間=256マイクロ秒で、合計376マイクロ秒となる。
【0089】
また、通信速度が1Mbps(1秒当たり1000000ビット)の場合は、電波送信に要する時間は1バイト当たり1マイクロ秒*8ビット=8マイクロ秒である。そのため、本実施形態の様に、同期ヘッダー5バイト、パケット長データ1バイト、ペイロードデータ2バイトの場合は、合計8マイクロ秒*8バイト=64マイクロ秒かかる。したがって、通信速度が1Mbpsの場合のマスターストロボに起因する発光遅延時間は、送信準備時間の120マイクロ秒と合計して184マイクロ秒となる。
【0090】
このようにして、マスターストロボに起因する発光遅延時間は、通信速度及び通信バイト数に応じて変化し、通信速度及び通信バイト数に基づいてマスターストロボのストロボMPU430により予め演算することができる。ステップS107では、マスターストロボのストロボMPU430がカメラMPU50からの問い合わせに対して、演算した発光遅延時間をシリアル通信にて伝えることで、カメラMPU50はマスターストロボに起因する発光遅延時間を取得している。なお、ステップS107では、カメラMPU50がマスターストロボから発光開始指示を表すデータを送信する際の通信速度及び通信バイト数を取得し、取得した通信速度及び通信バイト数に基づいてマスターストロボに起因する発光遅延時間を演算してもよい。
【0091】
一方、スレーブストロボに起因する発光遅延時間は、マスターストロボからの発光開始指示コマンドのコマンド解析に要する時間とトリガー電圧が発生してから発光開始するまでの時間で決定される。具体的には、本実施形態では、コマンド解析に要する時間=10マイクロ秒(図8のt6〜t7)、トリガー電圧が発生してから発光開始するまでの時間=50マイクロ秒(図8のt7〜t8)の合計60マイクロ秒かかる。なお、スレーブストロボに起因する発光遅延時間は、ストロボごとにほぼ一定であると想定される。そのため、ストロボ装置400内に想定される発光遅延時間を予め記憶しておき、ステップS106では、カメラMPU50はスレーブストロボのストロボMPU430が記憶しておいた発光遅延時間をマスターストロボを介して取得している。また、ストロボ装置の使用状況に応じて発光遅延時間が変更してしまう場合には、スレーブストロボのストロボMPU430が使用状況に応じて記憶している発光遅延時間を補正してマスターストロボへ伝えるようにしてもよい。
【0092】
ステップS104において通信モードが光通信である場合は、ステップS108にてカメラMPU50は、マスターストロボより光通信を行う場合のマスターストロボに起因する発光遅延時間をシリアル通信にて取得する。
【0093】
通信モードが光通信である場合における、発光遅延時間を図9を用いて説明する。
【0094】
図9においてA)、B)、C)は図6ないし図8で示したA)、B)、C)と対応している。また、D)はマスターストロボの発光部410の発光波形であり、微小な光パルスの組み合わせでデータを伝達する。1バイト目の最初の2ビットの光パルスはチャネル識別信号であり、続く8ビットの光パルスの所定の間隔でデータが1のときのみ光パルスが発光される。2バイト目以降は、最初の1ビット目がスタートパルスであり、続く8ビットの光パルスで構成される。本実施の形態では、送信データが2バイトであり、時刻t5の発光開始パルス(3)がスレーブストロボへの発光開始指示信号となる。
【0095】
また、E)はスレーブストロボでのマスター光信号の受信、コマンド解析と発光処理タイミングを示しており、前述のマスター光信号の所定パルス数の光パルスをデータ受信区間(1)で受信すると、受信したデータを1バイト目コマンド解析区間(2)で解析する。続くデータ受信区間(3)で2バイト目のデータを受信し、2バイト目コマンド解析区間(4)でコマンド解析を行い、発光開始パルス(3)を受信すると発光処理区間(5)で発光準備を行い発光する。また、G)、H)は図8で示したG)、H)とそれぞれ対応している。
【0096】
図9において、時刻t1でカメラ本体100からマスターストロボへシリアル通信により、スレーブストロボに対する、プリ発光または本発光、閃光発光またはFP発光などの発光モードや発光量、発光時間等の発光制御情報が伝えられる。
【0097】
時刻t2でシリアル通信が終了すると、マスターストロボのストロボMPU430は、発光制御情報に基づく送信処理を行っている間C)のDOラインをLoレベルに設定し、送信処理中であることをカメラ本体100に伝える。
【0098】
同時に、カメラ本体100から伝えられた発光制御情報に関する発光コマンドを2バイトデータとして、マスターストロボの発光部410をパルス発光させてスレーブストロボへ送信する。
【0099】
スレーブストロボは、送信された時刻とほぼ同時刻に受光部を介してマスターストロボからの発光制御情報に関するデータを受信し、コマンド解析を行う。
【0100】
次に、カメラMPU50は時刻t4でCLK端子をLoレベルに設定しスレーブストロボに対する発光開始指示を行う。
【0101】
そして、マスターストロボのストロボMPU430はCLK端子がLoレベルになったのを受けて、カメラ本体100からの発光開始指示を光パルスとしてスレーブストロボへ送信する。
【0102】
この発光開始指示が行われる時刻t4から発光開始指示の光パルスが送信される時刻t5までの遅延時間は、マスターストロボに起因する発光遅延時間である。このマスターストロボに起因する発光遅延時間には、カメラ本体100からのスレーブストロボに対する発光開始指示を受けてからトリガー電圧を発生させるまでの時間及びトリガー電圧を発生させてから実際に発光開始するまでの遅延時間が含まれている。スレーブストロボは受光部を介して発光開始指示に関する光パルスを受信し、時刻t5にて発光制御回路412をオン状態に設定し、トリガー回路411を動作させて発光トリガー電圧を時刻t6にて発生させる。
【0103】
そして、トリガー電圧を発生させてから約50マイクロ秒程度経過した後(時刻t7)に、スレーブストロボによる発光が開始される。
【0104】
したがって、カメラ本体100が発光開始指示を時刻t4で行っても、マスターストロボに起因する発光遅延時間とスレーブストロボに起因する発光遅延時間が加算されて、実際の発光は時刻t7に開始される。
【0105】
なお、本実施形態のおける光通信は、マスターストロボからスレーブストロボへの片方向通信であるため、電波通信のようにスレーブストロボからスレーブストロボに起因する発光遅延時間を取得することができない。
【0106】
しかしながら、スレーブストロボに起因する発光遅延時間は、発光開始指示に関する光パルスを受けてから発光を行うまでの遅延時間のみであり、マスターストロボに起因する発光遅延時間とほぼ等価であると考えられる。そのため、本実施形態では、光通信を行う場合の発光遅延時間は、マスターストロボに起因する発光遅延時間の2倍としている。
【0107】
次に、図4に戻り続くステップS109では、カメラMPU50はレリーズスイッチSW2の状態を確認し、レリーズスイッチSW2がオフの場合はステップS102に戻り、レリーズスイッチSW2がオンされていればステップS110へと進む。ステップS110では、カメラMPU50は、マスターストロボのメインコンデンサ403が所定の電圧まで充電され、発光可能であるか否かを確認する。なお、メインコンデンサ403が所定の電圧まで充電されたタイミングで、マスターストロボのストロボMPU430は、所定の電圧まで充電されたことを前述したシリアル通信によりカメラ本体100に伝える。
【0108】
マスターストロボが発光可能であればステップS111へと進み、発光可能でない場合はマスターストロボを発光させても所望の光量が得られないため、ステップS130へと進みストロボ発光をさせずに撮像(非発光撮影)を行う。
【0109】
なお、マスターストロボで発光を行わない設定の場合には、ステップS110は省略してもよい。
【0110】
次に、ステップS111では、カメラMPU50は、マスターストロボの通信モードを判別し、電波通信が設定されている場合はステップS112へと進み、その他のモードが設定されている場合はステップS120へと進む。なお、通信モードとして電波通信が設定されている場合にステップS112へと進むのは、カメラMPU50が双方向通信によりスレーブストロボのメインコンデンサ403の充電電圧を把握することができるからである。一方、他のストロボ装置と通信しない設定の場合にステップS120へと進むのは、スレーブストロボを使用しないのでスレーブストロボの充電電圧を把握しなくてよいからである。また、光通信が設定されている場合にステップS120へと進むのは、光通信はマスターストロボからスレーブストロボへの片方向通信であるため、スレーブストロボの充電電圧を把握できないからである。
【0111】
ステップS112では、マスターストロボのメインコンデンサ403が所定の電圧まで充電され、発光可能であるか否かを確認する。なお、メインコンデンサ403が所定の電圧まで充電されたタイミングで、スレーブストロボのストロボMPU430は、所定の電圧まで充電されたことを前述した電波通信によりマスターストロボに伝える。そして、マスターストロボからシリアル通信により、スレーブストロボが所定の電圧まで充電されたことがカメラ本体100に伝えられる。スレーブストロボが発光可能であればステップS120へと進み、発光可能でない場合はスレーブストロボを発光させても所望の光量が得られないため、ステップS130へと進む。
【0112】
ステップS120では、本発光に先立ってマスターストロボ、スレーブストロボによりプリ発光を行う。なお、通信モードが通信を行わない設定になっている場合は、マスターストロボによるプリ発光のみを行い、その他の通信モードでは、マスターストロボ及びスレーブストロボの一方あるいは両方でプリ発光を行う。両方でプリ発光を行う場合、マスターストロボ及びスレーブストロボのプリ発光を異なるタイミングで行い、そのときのそれぞれの測光結果を用いて後述する本発光量演算によりそれぞれの本発光量を演算する。また、プリ発光を行う際は、図6、図8、図9で説明した様に、カメラMPU50は、通信モードに応じた発光遅延時間に基づいて、プリ発光と同期するように測光センサー7によるプリ発光時の測光の開始タイミングを制御する。具体的には、カメラMPU50が発光開始指示を行ってから発光遅延時間に基づいて設定される所定時間が経過してから、測光センサー7による測光を開始させるので、測光とプリ発光とを同期させることができる。
【0113】
次に、ステップS121では、ステップS120で取得したプリ発光時の測光結果を用いて、公知の演算方法で本発光量を演算する。
【0114】
ステップS122では、ステップS121にて演算された本発光量にて、本発光を行う。この際、スレーブストロボは、カメラ本体100から電波通信あるいは光通信により送信された発光制御情報によりステップS121にて演算された本発光量を取得し、取得した本発光量となるように発行制御を行う。
【0115】
また、ステップS122において、カメラMPU50は、ステップS120と同様に、通信モードに応じた発光遅延時間に基づいて、本発光と同期するように撮像の開始タイミングを制御する。具体的には、カメラMPU50が発光開始指示を行ってから発光遅延時間に基づいて設定される所定時間が経過してから、撮像を開始させるので、撮像と本発光とを同期させることができる。
【0116】
続いて、撮像した画像を読み出し(ステップS123)、公知の方法にてデジタル現像を行い(センサー出力をJPEGなどのフォーマットに圧縮変換)(ステップS124)、外部メモリ56に現像された撮影画像を書き込み保存する(ステップS125)。
【0117】
次に、ステップS126では、カメラMPU50はレリーズスイッチSW2の状態を確認し、レリーズスイッチSW2がオンされていればステップS110へと戻り連続して撮影を行う。一方、レリーズスイッチSW2がオフの場合はステップS102に戻り撮影待機状態となる。
【0118】
以上のように、スレーブストロボと電波による無線通信を行う場合でも、マスターストロボ及びスレーブストロボに起因する発光遅延時間をそれぞれ取得することで、スレーブストロボの発光と当該発光に対応するカメラの動作とを同期させることができる。
【0119】
また、電波による無線通信を行う場合に、電波送信における通信速度及び通信バイト数に基づいて発光遅延時間を演算することで、スレーブストロボの発光と当該発光に対応するカメラの動作とをより正確に同期させることができる。
【0120】
また、発光開始指示を電波通信を介して行う場合と光通信を介して行う場合とでカメラMPU50がカメラの動作の開始タイミングを異ならせるので、いずれの通信モードでもスレーブストロボの発光と当該発光に対応するカメラの動作とを同期させることができる。
【0121】
また、マスターストロボが電波による無線通信のみが可能な場合であっても、上述したように電波による無線通信における発光遅延時間を取得することで、スレーブストロボの発光と当該発光に対応するカメラの動作とを同期させることができる。
【0122】
なお、本実施の形態では、カメラ本体に装着されたストロボ装置を介してスレーブストロボと電波による無線通信を行う構成であったが、電波通信部を備えたカメラが直接スレーブストロボと通信する構成であってもよい。あるいは、カメラ本体に電波通信装置を装着する構成であってもよい。
【0123】
また、本実施の形態では、カメラ本体に装着されたストロボ装置を介して光による無線通信を行う構成であったが、カメラ本体に内蔵されたストロボを介してスレーブストロボと通信してもよい。あるいは、カメラ本体に内蔵されたストロボとは異なる発光部を介してスレーブストロボと通信してもよい。
【0124】
また、本実施の形態では、キセノン管を発光させて光通信を行っているが、LEDなどのその他の光源を発光させて光通信を行っても構わない。
【符号の説明】
【0125】
50 カメラMPU
100 カメラ本体
400 ストロボ装置
410 発光部
430 ストロボMPU
460 RFモジュール
461 アンテナ
462 受光回路
463 フォトダイオード
【特許請求の範囲】
【請求項1】
電波通信手段を介して発光装置と電波による通信を行う撮像装置であって、
前記発光装置に対する発光開始指示を前記電波通信手段へ出力する発光開始指示手段と、
前記発光装置が前記電波通信手段からの前記発光開始指示を表すデータを受信し終わってから発光を開始するまでに要する第1の発光遅延時間を取得する取得手段と、
前記取得手段により取得された第1の発光遅延時間と、前記発光開始指示手段が前記発光開始指示を出力してから前記電波通信手段が前記発光開始指示を表すデータを送信し終わるまでに要する第2の発光遅延時間とに基づいて、前記発光開始指示にしたがって行なわれる発光に対応する前記撮像装置の動作の開始タイミングを制御する制御手段と、を有することを特徴とする撮像装置。
【請求項2】
前記取得手段は、前記電波通信手段を介して前記発光装置から前記第1の発光遅延時間を取得することを特徴とする請求項1に記載の撮像装置。
【請求項3】
前記電波通信手段が前記発光開始指示を表すデータを送信する際の通信速度及び通信バイト数に基づいて、前記第2の発光遅延時間を演算する演算手段を有することを特徴とする請求項1または2に記載の撮像装置。
【請求項4】
前記取得手段は、前記電波通信手段から前記第2の発光遅延時間を取得することを特徴とする請求項1または2に記載の撮像装置。
【請求項5】
前記撮像装置は、光通信手段を介して発光装置と光による通信を行うことができる撮像装置であって、
前記制御手段は、前記発光装置に対する発光開始指示を前記電波通信手段を介して行う場合と前記光通信手段を介して行う場合とで、前記発光開始指示にしたがって行なわれる発光に対応する動作の開始タイミングを異ならせることを特徴とする請求項1ないし4のいずれか1項に記載の撮像装置。
【請求項6】
前記制御手段は、前記発光開始指示にしたがって行われる発光が本発光の場合、当該本発光と同期するように前記撮像装置による撮像の開始タイミングを制御することを特徴とすることを特徴とする請求項1ないし5のいずれか1項に記載の撮像装置。
【請求項7】
前記制御手段は、前記発光開始指示にしたがって行われる発光がプリ発光の場合、当該プリ発光と同期するように前記撮像装置による測光の開始タイミングを制御することを特徴とすることを特徴とする請求項1ないし6のいずれか1項に記載の撮像装置。
【請求項8】
他の発光装置と電波による通信を行う発光装置であって、
撮像装置からの前記他の発光装置に対する発光開始指示を検知する検知手段と、
前記検知手段により検知された前記発光開始指示に基づく発光開始指示を表すデータを前記他の発光装置へ送信する電波通信手段と、
前記他の発光装置が前記電波通信手段からの前記発光開始指示を表すデータを受信し終わってから発光を開始するまでに要する第1の発光遅延時間を取得する取得手段と、
前記取得手段により取得された前記第1の発光遅延時間と、前記検知手段が前記発光開始指示を検知してから前記電波通信手段が前記発光開始指示を表すデータを送信し終わるまでに要する第2の発光遅延時間とを前記撮像装置へ出力する出力手段と、を有することを特徴とする発光装置。
【請求項9】
電波通信手段を介して撮像装置と発光装置とが電波による通信を行うカメラシステムであって、
前記発光装置に対する発光開始指示を前記電波通信手段へ出力する発光開始指示手段と、
前記発光装置が前記電波通信手段からの前記発光開始指示を表すデータを受信し終わってから発光を開始するまでに要する第1の発光遅延時間を取得する取得手段と、
前記取得手段により取得された第1の発光遅延時間と、前記発光開始指示手段が前記発光開始指示を出力してから前記電波通信手段が前記発光開始指示を表すデータを送信し終わるまでに要する第2の発光遅延時間とに基づいて、前記発光開始指示にしたがって行なわれる発光に対応する前記撮像装置の動作の開始タイミングを制御する制御手段と、を有することを特徴とするカメラシステム。
【請求項1】
電波通信手段を介して発光装置と電波による通信を行う撮像装置であって、
前記発光装置に対する発光開始指示を前記電波通信手段へ出力する発光開始指示手段と、
前記発光装置が前記電波通信手段からの前記発光開始指示を表すデータを受信し終わってから発光を開始するまでに要する第1の発光遅延時間を取得する取得手段と、
前記取得手段により取得された第1の発光遅延時間と、前記発光開始指示手段が前記発光開始指示を出力してから前記電波通信手段が前記発光開始指示を表すデータを送信し終わるまでに要する第2の発光遅延時間とに基づいて、前記発光開始指示にしたがって行なわれる発光に対応する前記撮像装置の動作の開始タイミングを制御する制御手段と、を有することを特徴とする撮像装置。
【請求項2】
前記取得手段は、前記電波通信手段を介して前記発光装置から前記第1の発光遅延時間を取得することを特徴とする請求項1に記載の撮像装置。
【請求項3】
前記電波通信手段が前記発光開始指示を表すデータを送信する際の通信速度及び通信バイト数に基づいて、前記第2の発光遅延時間を演算する演算手段を有することを特徴とする請求項1または2に記載の撮像装置。
【請求項4】
前記取得手段は、前記電波通信手段から前記第2の発光遅延時間を取得することを特徴とする請求項1または2に記載の撮像装置。
【請求項5】
前記撮像装置は、光通信手段を介して発光装置と光による通信を行うことができる撮像装置であって、
前記制御手段は、前記発光装置に対する発光開始指示を前記電波通信手段を介して行う場合と前記光通信手段を介して行う場合とで、前記発光開始指示にしたがって行なわれる発光に対応する動作の開始タイミングを異ならせることを特徴とする請求項1ないし4のいずれか1項に記載の撮像装置。
【請求項6】
前記制御手段は、前記発光開始指示にしたがって行われる発光が本発光の場合、当該本発光と同期するように前記撮像装置による撮像の開始タイミングを制御することを特徴とすることを特徴とする請求項1ないし5のいずれか1項に記載の撮像装置。
【請求項7】
前記制御手段は、前記発光開始指示にしたがって行われる発光がプリ発光の場合、当該プリ発光と同期するように前記撮像装置による測光の開始タイミングを制御することを特徴とすることを特徴とする請求項1ないし6のいずれか1項に記載の撮像装置。
【請求項8】
他の発光装置と電波による通信を行う発光装置であって、
撮像装置からの前記他の発光装置に対する発光開始指示を検知する検知手段と、
前記検知手段により検知された前記発光開始指示に基づく発光開始指示を表すデータを前記他の発光装置へ送信する電波通信手段と、
前記他の発光装置が前記電波通信手段からの前記発光開始指示を表すデータを受信し終わってから発光を開始するまでに要する第1の発光遅延時間を取得する取得手段と、
前記取得手段により取得された前記第1の発光遅延時間と、前記検知手段が前記発光開始指示を検知してから前記電波通信手段が前記発光開始指示を表すデータを送信し終わるまでに要する第2の発光遅延時間とを前記撮像装置へ出力する出力手段と、を有することを特徴とする発光装置。
【請求項9】
電波通信手段を介して撮像装置と発光装置とが電波による通信を行うカメラシステムであって、
前記発光装置に対する発光開始指示を前記電波通信手段へ出力する発光開始指示手段と、
前記発光装置が前記電波通信手段からの前記発光開始指示を表すデータを受信し終わってから発光を開始するまでに要する第1の発光遅延時間を取得する取得手段と、
前記取得手段により取得された第1の発光遅延時間と、前記発光開始指示手段が前記発光開始指示を出力してから前記電波通信手段が前記発光開始指示を表すデータを送信し終わるまでに要する第2の発光遅延時間とに基づいて、前記発光開始指示にしたがって行なわれる発光に対応する前記撮像装置の動作の開始タイミングを制御する制御手段と、を有することを特徴とするカメラシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−115731(P2013−115731A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−262272(P2011−262272)
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]