
撮像装置及びその制御方法、並びにプログラム
【課題】異常を検知するためだけのセンサを設けることなく、撮像装置が破壊された場合の犯人特定を行うことができる撮像装置及びその制御方法、並びにプログラムを提供する。
【解決手段】撮像装置1は、カメラユニット部2と、ロータリーエンコーダ112を有する雲台部3と、バッファメモリ5a及び補助メモリ105を有する記録部5とを備える。撮像装置1は、ロータリーエンコーダ112から出力されたエンコーダ信号に基づいて制御された雲台部3の回転状態において、定期的に撮影された画像をバッファメモリ5aに保存し、雲台部3の回転状態が上記エンコーダ信号に基づいて制御されていないときに、そのエンコーダ信号の出力時刻前後で撮影された画像をバッファメモリ5aから読み出し、その読み出した画像を補助メモリ105に保持する。
【解決手段】撮像装置1は、カメラユニット部2と、ロータリーエンコーダ112を有する雲台部3と、バッファメモリ5a及び補助メモリ105を有する記録部5とを備える。撮像装置1は、ロータリーエンコーダ112から出力されたエンコーダ信号に基づいて制御された雲台部3の回転状態において、定期的に撮影された画像をバッファメモリ5aに保存し、雲台部3の回転状態が上記エンコーダ信号に基づいて制御されていないときに、そのエンコーダ信号の出力時刻前後で撮影された画像をバッファメモリ5aから読み出し、その読み出した画像を補助メモリ105に保持する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、撮像装置及びその制御方法、並びにプログラムに関し、特にパンチルト制御を行いながら監視を行う撮像装置及びその制御方法、並びにプログラムに関する。
【背景技術】
【0002】
防犯用として、従来より駅やデパートなどの多くの場所で監視カメラが設置されていたが、近年では、家庭用の防犯対策として小型の監視カメラも普及し始めている。
【0003】
一般的な監視カメラは、その撮影した映像を離れた場所にあるモニタに表示する。これにより、ユーザはリアルタイムに遠隔地からその撮影された映像を確認することができる。
【0004】
また、撮影された映像を記憶装置に保存しておき、後で映像を確認することができるようにした監視カメラも知られている。さらには、上記映像保存用の記憶装置を監視カメラ自体に取り付けることのできるようにしたものも提案されている。
【0005】
一方で、監視カメラが破壊されたり、盗まれたりすることも起こりえるため、監視カメラ自体の盗難事故や、それに伴う損傷事故に対処するさまざまな方法が提案されている。
【0006】
例えば、監視カメラが赤外線センサにより不審者が侵入したことを検知したときに警報を鳴らすという方法(例えば、特許文献1参照)が従来技術として知られている。また、監視カメラが振動センサにより被監視対象物に異常な振動があったことを検知したときに警報を鳴らすという方法(例えば、特許文献2参照)も従来技術として知られている。
【特許文献1】特開平05-006420号公報
【特許文献2】特開2004-164103号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、上記従来技術の方法では、異常を検知するためだけに監視カメラに赤外線センサや振動センサを設けているため、装置が複雑になり、またコストも余計にかかってしまう恐れがある。
【0008】
本発明の目的は、異常を検知するためだけのセンサを別途撮像装置に設けることなく、撮像装置が破壊された場合等の犯人特定を行うことができる撮像装置及びその制御方法、並びにプログラムを提供することにある。
【課題を解決するための手段】
【0009】
上記目的を達成するために、請求項1記載の撮像装置は、カメラ部と、前記カメラ部を支持すると共に回転させる雲台部と、前記雲台部の回転状態を検知する検知部と、前記検知部で検知された回転状態に基づき前記雲台部の回転状態を制御する回転制御部とを備える撮像装置であって、前記制御された回転状態において定期的に前記カメラ部で撮影された画像をメモリに保持する画像保持手段を備える撮像装置において、前記雲台部の回転状態が前記検知部で検知された回転状態に基づき制御されていないときに、当該回転状態を前記検知部が検知した検知時刻前後で撮影された画像を前記メモリから読み出し、当該画像を他のメモリに保持する他の画像保持手段を備えることを特徴とする。
【0010】
上記目的を達成するために、請求項6記載の制御方法は、カメラ部と、前記カメラ部を支持すると共に回転させる雲台部と、前記雲台部の回転状態を検知する検知部と、前記検知部で検知された回転状態に基づき前記雲台部の回転状態を制御する回転制御部とを備える撮像装置の制御方法であって、前記制御された回転状態において定期的に前記カメラ部で撮影された画像をメモリに保持する画像保持ステップを備える制御方法において、前記雲台部の回転状態が前記検知部で検知された回転状態に基づき制御されていないときに、当該回転状態を前記検知部が検知した検知時刻前後で撮影された画像を前記メモリから読み出し、当該画像を他のメモリに保持する他の画像保持ステップを備えることを特徴とする。
【0011】
上記目的を達成するために、請求項7記載のプログラムは、カメラ部と、前記カメラ部を支持すると共に回転させる雲台部と、前記雲台部の回転状態を検知する検知部と、前記検知部で検知された回転状態に基づき前記雲台部の回転状態を制御する回転制御部とを備える撮像装置の制御方法をコンピュータにより実行させるプログラムであって、前記制御された回転状態において定期的に前記カメラ部で撮影された画像をメモリに保持する画像保持モジュールを備えるプログラムにおいて、前記雲台部の回転状態が前記検知部で検知された回転状態に基づき制御されていないときに、当該回転状態を前記検知部が検知した検知時刻前後で撮影された画像を前記メモリから読み出し、当該画像を他のメモリに保持する他の画像保持モジュールを備えることを特徴とする。
【発明の効果】
【0012】
本発明によれば、撮像装置は、検知部で検知された回転状態に基づき制御された回転状態において、定期的にカメラ部で撮影された画像をメモリに保持し、雲台部の回転状態が、検知部で検知された回転状態に基づき制御されていないときに、その回転状態を検知部が検知した検知時刻前後で撮影された画像をメモリから読み出し、その画像を他のメモリに保持するので、通常動作中に用いられている検知部を異常、すなわち、手動で雲台部が動かされたか否かを検知するセンサとしても用いることができ、異常を検知するためだけのセンサを別途撮像装置に設けることなく、撮像装置が破壊された場合等の犯人特定を行うことができる。
【0013】
好ましくは、上記検知時刻が上記定期的に撮影されるの時刻でないとき、その検知時刻にカメラ部で画像を撮影し、その画像を上記他のメモリに保持することにより、撮像装置は上記異常検知時の様子を確実に撮影することができる。
【0014】
好ましくは、他のメモリに保持された画像を外部の情報処理装置に送信することにより、撮像装置が盗まれた場合でも、その前後の画像を遠隔地の情報端末に送信することができ、犯人を確実に特定することができる。
【0015】
好ましくは、上記検知時刻に警告音を発生することにより、撮像装置を盗難もしくは破壊しようとする犯人に対して威嚇することができる。
【発明を実施するための最良の形態】
【0016】
以下、本発明の実施の形態を図面を用いて詳述する。
【0017】
図1は、本発明の実施の形態に係る撮像装置の構成を概略的に示すブロック図である。
【0018】
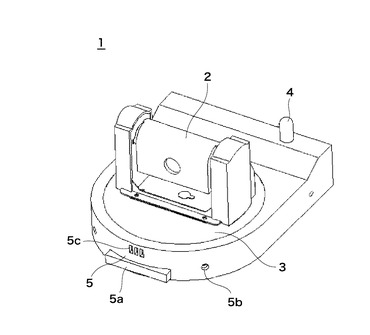
図1において、撮像装置1は、カメラユニット部2と、雲台部3と、通信部4と、記録部5とを備える。
【0019】
カメラユニット部2は、ズーム・フォーカス光学系からなる撮像光学系、露光調整装置、カメラユニット部2全体を駆動するための駆動系からなるレンズユニット(いずれも不図示)を備える。さらに、カメラユニット部2は、画像撮影を行う撮像素子を有する撮像回路基板、及び信号処理回路を有するカメラ回路基板(いずれも不図示)等を備える。
【0020】
雲台部3は、上記カメラユニット部2を支持すると共に、水平回転させるパンニング手段と、上記カメラユニット部2を支持すると共に、垂直傾動(回転)させるチルティング手段からなるパンチルト機構(不図示)を有し、上記カメラユニット部2における撮影方向を任意の方向に回転させることができる。
【0021】
通信部4は、ネットワーク回路や電源ユニット(いずれも不図示)等が装着されている通信機能を備える。これにより、本撮像装置1は、例えば、無線LANやインターネットなどの通信網を経由してさまざまな情報端末に接続することができる。
【0022】
記録部5は、画像を書き込んでいるバッファメモリ5aと、上記バッファメモリ5aに画像が保存されていることを表示する表示部5bと、警告音を出力するスピーカー5cと、後述する不図示の補助メモリ105を備える。
【0023】
表示部5bは、表示機能を有するものであればよく、例えば液晶、有機EL、LED等から構成される。
【0024】
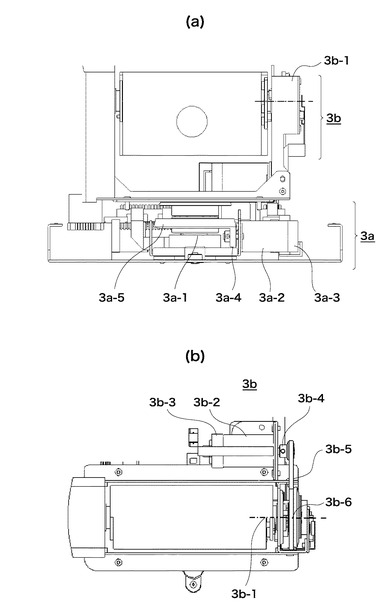
図2は、図1における雲台部3の機構を説明するのに用いられる図であり、(a)は雲台部3の正面図であり、(b)は雲台部3の上面図である。
【0025】
図2(a)において、雲台部3は、パン回転軸3a−1を中心にパン(水平)方向に回転するパン機構3aと、チルト回転軸3b−1を中心にチルト(垂直)方向に回転するチルト機構3bとを備える。さらに、雲台部3は、パンの回転位置を検出するためのパン用エンコーダ3a−3と、チルトの回転位置を検出するためのチルト用エンコーダ3b−2とを備える。
【0026】
パン機構3aは、パン用モータ3a−2が駆動することによりパン用モータ軸(不図示)に取り付けられたモータギア3a−4が回転し、モータギア3a−4とかみ合うカサ歯ギア3a−5に回転が伝達される。カサ歯ギア3a−5はパン回転軸3a−1と同軸上に固定されており、カサ歯ギア3a−5からパン回転軸3a−1に回転がさらに伝達される。
【0027】
図2(b)において、チルト機構3bは、チルト用モータ3b−2が駆動することによりチルト用モータ軸(不図示)に取り付けられたモータプーリ3b−4が回転する。さらに、モータプーリ3b−4に取り付けられたタイミングベルト3b−5によって、チルトプーリ3b−6に回転が伝達される。モータプーリ3b−6はチルト回転軸3b−1と同軸上に固定されており、モータプーリ3b−6からチルト回転軸3b−1に回転がさらに伝達される。
【0028】
パン用モータ3a−2及びチルト用モータ3b−2は、DCモータやステッピングモータなど動力を出力するあらゆるモータを用いることができる。しかし、超音波モータは、応答性に優れており、且つ駆動命令信号を入力後すぐに駆動することができるため、上記モータとして超音波モータを用いていることが好ましい。これにより、すばやいパンチルト動作で撮像装置1の撮影方向を変えることができる。また、超音波モータは保持トルクがあるため、モータが駆動していない状態でも撮像装置1の位置を保持することができる。さらに、超音波モータは電磁モータに比べて低速で高トルクの出力が得られるため、少ないギア減速でモータ機構部を構成でき、撮像装置1全体を小型化することができる。
【0029】
パン用エンコーダ3a−3は、パン用モータ3a−2の回転軸に取り付けられており、また、チルト用エンコーダ3b−2は、チルト用モータ3b−2の回転軸に取り付けられている。
【0030】
パン用エンコーダ3a−3は、パン用モータ3a−2の回転軸の回転を検出する。従って、パン用エンコーダ3a−2は、上述したパン用モータ3a−2の駆動によるパン用モータ3a−2の回転軸の回転だけでなく、外部から手動で雲台部3が回転したことによるパン用モータ3a−2の回転軸の回転も検出する。
【0031】
同様に、チルト用エンコーダ3b−2は、上述したチルト用モータ3b−2の駆動によるチルト用モータ3b−2の回転軸の回転だけでなく、外部から手動で雲台部3が回転したことによるチルト用モータ3b−2の回転軸の回転も検出する。
【0032】
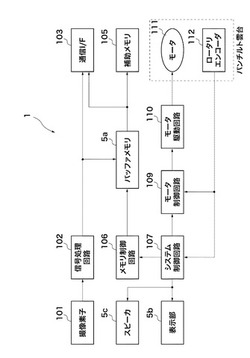
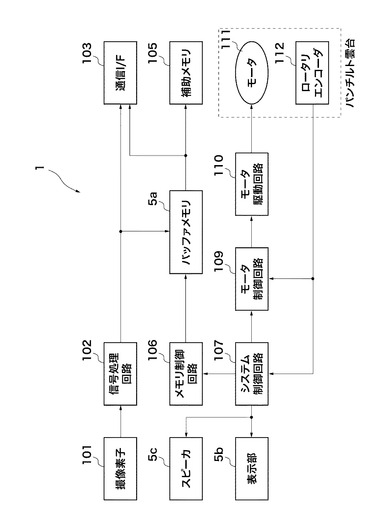
図3は、撮像装置1の機能構成を示すブロック図である。
【0033】
図3において、撮像装置1は、自装置全体を制御するシステム制御回路107と、パン用エンコーダ3a−2及びチルト用エンコーダ3b−2から成るロータリーエンコーダ112とを備える。また、撮像装置1は、パン用モータ3a−2及びチルト用モータ3b−2から成るモータ111と、モータ111を駆動するモータ駆動回路110と、モータ駆動回路を制御するモータ制御回路109とを備える。
【0034】
さらに、撮像装置1は、カメラユニット部2の撮像回路基板にある撮像素子101と、カメラユニット部2のカメラ回路基板にある信号処理回路102と、通信部4にある通信I/F103と、記録部5にあるバッファメモリ5aとを備える。また、撮像装置1は、同じく記録部5にある大容量のハードディスクから成る補助メモリ105、表示部5b、及びスピーカー5cを備える。
【0035】
まず、ロータリーエンコーダ112より回転が検出された旨の信号(エンコーダ信号)がシステム制御回路107に出力されると、システム制御回路107はモータ111が駆動状態か停止状態かを判別する。
【0036】
上記判別の結果、モータ111が駆動状態である場合、システム制御回路107は、ロータリーエンコーダ112からの出力信号に基づき、モータ制御回路109、モータ駆動回路110を経由してモータ111の制御を行う。一方、システム制御回路107は、定期的に撮像素子101により撮影された画像信号を信号処理回路102を経由して保存形式に変換し、バッファメモリ5aに循環的に更新、記録する。
【0037】
一方上記判別の結果、モータ111が停止状態である場合、すなわち手動で雲台部3が動かされたとき、システム制御回路107は、メモリ制御回路106に移動検出信号を出力する。メモリ制御回路106は、この移動検出信号の出力があったとき、バッファメモリ5aに保存された画像の中からその移動検出信号の出力時刻の一定時間前の画像と、一定時間後の画像とを読み出す。その後、メモリ制御回路106は、その読み出した画像に何番目に出力された移動検出信号かを示すシリアルナンバーや発生時刻などの管理データを付けて補助メモリ105に記録する。
【0038】
さらに、システム制御回路107は、上記補助メモリ105に記録された画像を通信I/F103、通信網を介して遠隔の情報端末に送信する。
【0039】
また、システム制御回路107は、スピーカー5c及び表示部5bにも上記移動検出信号を出力する。スピーカー5cは、この移動検出信号の出力があったときに警告音を発生する。また、表示部5bは、この移動検出信号の出力があったときに上記画像が保存されていることを表示する。
【0040】
さらに、システム制御回路107は、モータ111が停止状態であると判別した場合、その判別時点で上記定期的な撮像素子101による画像撮影が行われるか否かを判別する。上記定期的な画像撮影が行われないとき、システム制御回路107は、撮像素子101による画像撮影を行い、その撮影された画像信号を信号処理回路102を経由して保存形式に変換して、メモリ制御回路106に送信する。メモリ制御回路106は、この撮影された画像信号が送信されると、これを補助メモリ105に保存する。また、ステム制御回路107は、上記補助メモリ105に記録された画像も通信I/F103、通信網を介して遠隔の情報端末に送信する。
【0041】
本実施の形態に係る補助メモリ105は大容量のハードディスクであるが、電源を落とした状態でも保存が可能な記憶媒体であればこれに限定されない。
【0042】
以下、図3で概略的に説明した撮像処理の手続きの流れを以下の図4のフローチャートを用いて、より詳細に説明する。
【0043】
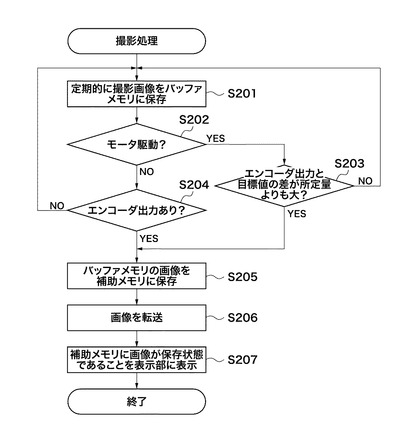
図4は、撮像装置1による撮影処理の手順を示すフローチャートである。
【0044】
図4において、まず、定期的に撮像素子101により画像が撮影されると、この撮影された画像をバッファメモリ5aに保存する(ステップS201)。
【0045】
その後、モータが駆動状態であるか否かを判別し(ステップS202)、駆動状態であればステップS203へ進み、駆動状態でなく、停止状態である場合はステップS204へ進む。
【0046】
ステップS203では、ステップS202のモータ駆動後にロータリーエンコーダ112から出力されたエンコーダ信号から回転値を読み出し、その回転値と目標値の差がユーザが事前に設定した所定量内であるか否かを判別する。この判別の結果、所定量内であるときは、正しく制御が行われていると判断してステップS201からの処理に戻り、一方、所定量内でないときは、手動で雲台部3が動かされたと判断してステップS205に進む。
【0047】
一方、ステップS204では、ロータリーエンコーダ112からエンコーダ信号が出力されているか否かを判別する。この判別の結果、エンコーダ信号が出力されなかったときは、正しく制御が行われていると判断してステップS201からの処理に戻り、一方、エンコーダ信号が出力されたときは、手動で雲台部3が動かされたと判断してステップS205に進む。
【0048】
ステップS205では、バッファメモリ5aの画像を補助メモリ105に保存する。このとき保存される画像は、ステップS204からの処理の場合は、エンコーダ信号が出力された時刻の前後の画像である。また、ステップS203から進んできた場合は、エンコーダ信号が出力された時刻のうち、その出力されたエンコーダ信号から読み出した回転値と目標値の差が所定量よりも大きくなった時刻の前後の画像である。尚、このとき補助メモリ105に保存される画像の長さは、ユーザが事前に設定することができる。また、このときスピーカ5cから警報を発生する。これにより、撮像装置1を盗難もしくは破壊しようとする犯人に対して威嚇することができる。
【0049】
次に、ステップS205で補助メモリ105に保存されたデータを、通信網を介して遠隔地の情報端末に送信する(ステップS206)。これにより、撮像装置1が盗まれた場合でも、その前後の画像を遠隔地の情報端末に送信することができ、犯人を確実に特定することができる。
【0050】
その後、表示部5bに画像が保存状態であること表示して(ステップS207)、本処理を終了する。
【0051】
図4の処理によれば、撮像装置1は、ロータリーエンコーダ112から出力されたエンコーダ信号に基づいて制御された雲台部3の回転状態において、定期的に撮影された画像をバッファメモリ5aに保存する(ステップS201〜S204)。一方、雲台部3の回転状態が上記エンコーダ信号に基づいて制御されていないときに(ステップS203,S204でYES)、その信号出力時刻前後で撮影された画像をバッファメモリ5aから読み出す。その後、その読み出した画像を補助メモリ105に保持する(ステップS205)。これにより、通常動作中に用いられているロータリーエンコーダ112を異常、すなわち、手動で雲台部3が動かされたか否かを検知するセンサとしても用いることができる。さらに、異常を検知するためだけのセンサを別途撮像装置1に設けることなく、撮像装置1が破壊された場合等の犯人特定を行うことができる。
【0052】
また、ステップS204でエンコーダ信号の出力があった場合、その出力時刻において上記ステップS201における定期的な画像撮影が行われないときは、その時刻での撮像素子による画像撮影も行い、これも補助メモリ105に保存するようにしてもよい。これにより、撮像装置1は上記異常検知時の様子を確実に撮影することができる。
【0053】
また、本発明の目的は、前述した各実施の形態の機能を実現するソフトウェアのプログラムコードを記憶した記憶媒体を、システム或いは装置に供給し、そのシステム或いは装置のコンピュータ(またはCPUやMPU等)が記憶媒体に格納されたプログラムコードを読み出し実行することによっても達成される。
【0054】
この場合、記憶媒体から読み出されたプログラムコード自体が前述した各実施の形態の機能を実現することになり、そのプログラムコード及び該プログラムコードを記憶した記憶媒体は本発明を構成することになる。
【0055】
また、プログラムコードを供給するための記憶媒体としては、例えば、フロッピー(登録商標)ディスク、ハードディスク、光磁気ディスク、CD−ROM、CD−R、CD−RW、DVD−ROM、DVD−RAM、DVD−RW、DVD+RW等の光ディスク、磁気テープ、不揮発性のメモリカード、ROM等を用いることができる。または、プログラムコードをネットワークを介してダウンロードしてもよい。
【0056】
また、コンピュータが読み出したプログラムコードを実行することにより、前述した各実施の形態の機能が実現されるだけではなく、そのプログラムコードの指示に基づき、コンピュータ上で稼動しているOS(オペレーティングシステム)等が実際の処理の一部または全部を行い、その処理によって前述した各実施の形態の機能が実現される場合も含まれる。
【0057】
さらに、記憶媒体から読み出されたプログラムコードが、コンピュータに挿入された機能拡張ボードやコンピュータに接続された機能拡張ユニットに備わるメモリに書き込まれた後、そのプログラムコードの指示に基づき、その拡張機能を拡張ボードや拡張ユニットに備わるCPU等が実際の処理の一部または全部を行い、その処理によって前述した各実施の形態の機能が実現される場合も含まれる。
【図面の簡単な説明】
【0058】
【図1】本発明の実施の形態に係る撮像装置の構成を概略的に示すブロック図である。
【図2】図1における雲台部の機構を説明するのに用いられる図であり、(a)は雲台部の正面図であり、(b)は雲台部の上面図である。
【図3】撮像装置の機能構成を示すブロック図である。
【図4】撮像装置による撮影処理の手順を示すフローチャートである。
【符号の説明】
【0059】
1 撮像装置
2 カメラユニット部
3 雲台部
4 通信部
5 記録部
5a バッファメモリ
105 補助メモリ
112 ロータリーエンコーダ
【技術分野】
【0001】
本発明は、撮像装置及びその制御方法、並びにプログラムに関し、特にパンチルト制御を行いながら監視を行う撮像装置及びその制御方法、並びにプログラムに関する。
【背景技術】
【0002】
防犯用として、従来より駅やデパートなどの多くの場所で監視カメラが設置されていたが、近年では、家庭用の防犯対策として小型の監視カメラも普及し始めている。
【0003】
一般的な監視カメラは、その撮影した映像を離れた場所にあるモニタに表示する。これにより、ユーザはリアルタイムに遠隔地からその撮影された映像を確認することができる。
【0004】
また、撮影された映像を記憶装置に保存しておき、後で映像を確認することができるようにした監視カメラも知られている。さらには、上記映像保存用の記憶装置を監視カメラ自体に取り付けることのできるようにしたものも提案されている。
【0005】
一方で、監視カメラが破壊されたり、盗まれたりすることも起こりえるため、監視カメラ自体の盗難事故や、それに伴う損傷事故に対処するさまざまな方法が提案されている。
【0006】
例えば、監視カメラが赤外線センサにより不審者が侵入したことを検知したときに警報を鳴らすという方法(例えば、特許文献1参照)が従来技術として知られている。また、監視カメラが振動センサにより被監視対象物に異常な振動があったことを検知したときに警報を鳴らすという方法(例えば、特許文献2参照)も従来技術として知られている。
【特許文献1】特開平05-006420号公報
【特許文献2】特開2004-164103号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、上記従来技術の方法では、異常を検知するためだけに監視カメラに赤外線センサや振動センサを設けているため、装置が複雑になり、またコストも余計にかかってしまう恐れがある。
【0008】
本発明の目的は、異常を検知するためだけのセンサを別途撮像装置に設けることなく、撮像装置が破壊された場合等の犯人特定を行うことができる撮像装置及びその制御方法、並びにプログラムを提供することにある。
【課題を解決するための手段】
【0009】
上記目的を達成するために、請求項1記載の撮像装置は、カメラ部と、前記カメラ部を支持すると共に回転させる雲台部と、前記雲台部の回転状態を検知する検知部と、前記検知部で検知された回転状態に基づき前記雲台部の回転状態を制御する回転制御部とを備える撮像装置であって、前記制御された回転状態において定期的に前記カメラ部で撮影された画像をメモリに保持する画像保持手段を備える撮像装置において、前記雲台部の回転状態が前記検知部で検知された回転状態に基づき制御されていないときに、当該回転状態を前記検知部が検知した検知時刻前後で撮影された画像を前記メモリから読み出し、当該画像を他のメモリに保持する他の画像保持手段を備えることを特徴とする。
【0010】
上記目的を達成するために、請求項6記載の制御方法は、カメラ部と、前記カメラ部を支持すると共に回転させる雲台部と、前記雲台部の回転状態を検知する検知部と、前記検知部で検知された回転状態に基づき前記雲台部の回転状態を制御する回転制御部とを備える撮像装置の制御方法であって、前記制御された回転状態において定期的に前記カメラ部で撮影された画像をメモリに保持する画像保持ステップを備える制御方法において、前記雲台部の回転状態が前記検知部で検知された回転状態に基づき制御されていないときに、当該回転状態を前記検知部が検知した検知時刻前後で撮影された画像を前記メモリから読み出し、当該画像を他のメモリに保持する他の画像保持ステップを備えることを特徴とする。
【0011】
上記目的を達成するために、請求項7記載のプログラムは、カメラ部と、前記カメラ部を支持すると共に回転させる雲台部と、前記雲台部の回転状態を検知する検知部と、前記検知部で検知された回転状態に基づき前記雲台部の回転状態を制御する回転制御部とを備える撮像装置の制御方法をコンピュータにより実行させるプログラムであって、前記制御された回転状態において定期的に前記カメラ部で撮影された画像をメモリに保持する画像保持モジュールを備えるプログラムにおいて、前記雲台部の回転状態が前記検知部で検知された回転状態に基づき制御されていないときに、当該回転状態を前記検知部が検知した検知時刻前後で撮影された画像を前記メモリから読み出し、当該画像を他のメモリに保持する他の画像保持モジュールを備えることを特徴とする。
【発明の効果】
【0012】
本発明によれば、撮像装置は、検知部で検知された回転状態に基づき制御された回転状態において、定期的にカメラ部で撮影された画像をメモリに保持し、雲台部の回転状態が、検知部で検知された回転状態に基づき制御されていないときに、その回転状態を検知部が検知した検知時刻前後で撮影された画像をメモリから読み出し、その画像を他のメモリに保持するので、通常動作中に用いられている検知部を異常、すなわち、手動で雲台部が動かされたか否かを検知するセンサとしても用いることができ、異常を検知するためだけのセンサを別途撮像装置に設けることなく、撮像装置が破壊された場合等の犯人特定を行うことができる。
【0013】
好ましくは、上記検知時刻が上記定期的に撮影されるの時刻でないとき、その検知時刻にカメラ部で画像を撮影し、その画像を上記他のメモリに保持することにより、撮像装置は上記異常検知時の様子を確実に撮影することができる。
【0014】
好ましくは、他のメモリに保持された画像を外部の情報処理装置に送信することにより、撮像装置が盗まれた場合でも、その前後の画像を遠隔地の情報端末に送信することができ、犯人を確実に特定することができる。
【0015】
好ましくは、上記検知時刻に警告音を発生することにより、撮像装置を盗難もしくは破壊しようとする犯人に対して威嚇することができる。
【発明を実施するための最良の形態】
【0016】
以下、本発明の実施の形態を図面を用いて詳述する。
【0017】
図1は、本発明の実施の形態に係る撮像装置の構成を概略的に示すブロック図である。
【0018】
図1において、撮像装置1は、カメラユニット部2と、雲台部3と、通信部4と、記録部5とを備える。
【0019】
カメラユニット部2は、ズーム・フォーカス光学系からなる撮像光学系、露光調整装置、カメラユニット部2全体を駆動するための駆動系からなるレンズユニット(いずれも不図示)を備える。さらに、カメラユニット部2は、画像撮影を行う撮像素子を有する撮像回路基板、及び信号処理回路を有するカメラ回路基板(いずれも不図示)等を備える。
【0020】
雲台部3は、上記カメラユニット部2を支持すると共に、水平回転させるパンニング手段と、上記カメラユニット部2を支持すると共に、垂直傾動(回転)させるチルティング手段からなるパンチルト機構(不図示)を有し、上記カメラユニット部2における撮影方向を任意の方向に回転させることができる。
【0021】
通信部4は、ネットワーク回路や電源ユニット(いずれも不図示)等が装着されている通信機能を備える。これにより、本撮像装置1は、例えば、無線LANやインターネットなどの通信網を経由してさまざまな情報端末に接続することができる。
【0022】
記録部5は、画像を書き込んでいるバッファメモリ5aと、上記バッファメモリ5aに画像が保存されていることを表示する表示部5bと、警告音を出力するスピーカー5cと、後述する不図示の補助メモリ105を備える。
【0023】
表示部5bは、表示機能を有するものであればよく、例えば液晶、有機EL、LED等から構成される。
【0024】
図2は、図1における雲台部3の機構を説明するのに用いられる図であり、(a)は雲台部3の正面図であり、(b)は雲台部3の上面図である。
【0025】
図2(a)において、雲台部3は、パン回転軸3a−1を中心にパン(水平)方向に回転するパン機構3aと、チルト回転軸3b−1を中心にチルト(垂直)方向に回転するチルト機構3bとを備える。さらに、雲台部3は、パンの回転位置を検出するためのパン用エンコーダ3a−3と、チルトの回転位置を検出するためのチルト用エンコーダ3b−2とを備える。
【0026】
パン機構3aは、パン用モータ3a−2が駆動することによりパン用モータ軸(不図示)に取り付けられたモータギア3a−4が回転し、モータギア3a−4とかみ合うカサ歯ギア3a−5に回転が伝達される。カサ歯ギア3a−5はパン回転軸3a−1と同軸上に固定されており、カサ歯ギア3a−5からパン回転軸3a−1に回転がさらに伝達される。
【0027】
図2(b)において、チルト機構3bは、チルト用モータ3b−2が駆動することによりチルト用モータ軸(不図示)に取り付けられたモータプーリ3b−4が回転する。さらに、モータプーリ3b−4に取り付けられたタイミングベルト3b−5によって、チルトプーリ3b−6に回転が伝達される。モータプーリ3b−6はチルト回転軸3b−1と同軸上に固定されており、モータプーリ3b−6からチルト回転軸3b−1に回転がさらに伝達される。
【0028】
パン用モータ3a−2及びチルト用モータ3b−2は、DCモータやステッピングモータなど動力を出力するあらゆるモータを用いることができる。しかし、超音波モータは、応答性に優れており、且つ駆動命令信号を入力後すぐに駆動することができるため、上記モータとして超音波モータを用いていることが好ましい。これにより、すばやいパンチルト動作で撮像装置1の撮影方向を変えることができる。また、超音波モータは保持トルクがあるため、モータが駆動していない状態でも撮像装置1の位置を保持することができる。さらに、超音波モータは電磁モータに比べて低速で高トルクの出力が得られるため、少ないギア減速でモータ機構部を構成でき、撮像装置1全体を小型化することができる。
【0029】
パン用エンコーダ3a−3は、パン用モータ3a−2の回転軸に取り付けられており、また、チルト用エンコーダ3b−2は、チルト用モータ3b−2の回転軸に取り付けられている。
【0030】
パン用エンコーダ3a−3は、パン用モータ3a−2の回転軸の回転を検出する。従って、パン用エンコーダ3a−2は、上述したパン用モータ3a−2の駆動によるパン用モータ3a−2の回転軸の回転だけでなく、外部から手動で雲台部3が回転したことによるパン用モータ3a−2の回転軸の回転も検出する。
【0031】
同様に、チルト用エンコーダ3b−2は、上述したチルト用モータ3b−2の駆動によるチルト用モータ3b−2の回転軸の回転だけでなく、外部から手動で雲台部3が回転したことによるチルト用モータ3b−2の回転軸の回転も検出する。
【0032】
図3は、撮像装置1の機能構成を示すブロック図である。
【0033】
図3において、撮像装置1は、自装置全体を制御するシステム制御回路107と、パン用エンコーダ3a−2及びチルト用エンコーダ3b−2から成るロータリーエンコーダ112とを備える。また、撮像装置1は、パン用モータ3a−2及びチルト用モータ3b−2から成るモータ111と、モータ111を駆動するモータ駆動回路110と、モータ駆動回路を制御するモータ制御回路109とを備える。
【0034】
さらに、撮像装置1は、カメラユニット部2の撮像回路基板にある撮像素子101と、カメラユニット部2のカメラ回路基板にある信号処理回路102と、通信部4にある通信I/F103と、記録部5にあるバッファメモリ5aとを備える。また、撮像装置1は、同じく記録部5にある大容量のハードディスクから成る補助メモリ105、表示部5b、及びスピーカー5cを備える。
【0035】
まず、ロータリーエンコーダ112より回転が検出された旨の信号(エンコーダ信号)がシステム制御回路107に出力されると、システム制御回路107はモータ111が駆動状態か停止状態かを判別する。
【0036】
上記判別の結果、モータ111が駆動状態である場合、システム制御回路107は、ロータリーエンコーダ112からの出力信号に基づき、モータ制御回路109、モータ駆動回路110を経由してモータ111の制御を行う。一方、システム制御回路107は、定期的に撮像素子101により撮影された画像信号を信号処理回路102を経由して保存形式に変換し、バッファメモリ5aに循環的に更新、記録する。
【0037】
一方上記判別の結果、モータ111が停止状態である場合、すなわち手動で雲台部3が動かされたとき、システム制御回路107は、メモリ制御回路106に移動検出信号を出力する。メモリ制御回路106は、この移動検出信号の出力があったとき、バッファメモリ5aに保存された画像の中からその移動検出信号の出力時刻の一定時間前の画像と、一定時間後の画像とを読み出す。その後、メモリ制御回路106は、その読み出した画像に何番目に出力された移動検出信号かを示すシリアルナンバーや発生時刻などの管理データを付けて補助メモリ105に記録する。
【0038】
さらに、システム制御回路107は、上記補助メモリ105に記録された画像を通信I/F103、通信網を介して遠隔の情報端末に送信する。
【0039】
また、システム制御回路107は、スピーカー5c及び表示部5bにも上記移動検出信号を出力する。スピーカー5cは、この移動検出信号の出力があったときに警告音を発生する。また、表示部5bは、この移動検出信号の出力があったときに上記画像が保存されていることを表示する。
【0040】
さらに、システム制御回路107は、モータ111が停止状態であると判別した場合、その判別時点で上記定期的な撮像素子101による画像撮影が行われるか否かを判別する。上記定期的な画像撮影が行われないとき、システム制御回路107は、撮像素子101による画像撮影を行い、その撮影された画像信号を信号処理回路102を経由して保存形式に変換して、メモリ制御回路106に送信する。メモリ制御回路106は、この撮影された画像信号が送信されると、これを補助メモリ105に保存する。また、ステム制御回路107は、上記補助メモリ105に記録された画像も通信I/F103、通信網を介して遠隔の情報端末に送信する。
【0041】
本実施の形態に係る補助メモリ105は大容量のハードディスクであるが、電源を落とした状態でも保存が可能な記憶媒体であればこれに限定されない。
【0042】
以下、図3で概略的に説明した撮像処理の手続きの流れを以下の図4のフローチャートを用いて、より詳細に説明する。
【0043】
図4は、撮像装置1による撮影処理の手順を示すフローチャートである。
【0044】
図4において、まず、定期的に撮像素子101により画像が撮影されると、この撮影された画像をバッファメモリ5aに保存する(ステップS201)。
【0045】
その後、モータが駆動状態であるか否かを判別し(ステップS202)、駆動状態であればステップS203へ進み、駆動状態でなく、停止状態である場合はステップS204へ進む。
【0046】
ステップS203では、ステップS202のモータ駆動後にロータリーエンコーダ112から出力されたエンコーダ信号から回転値を読み出し、その回転値と目標値の差がユーザが事前に設定した所定量内であるか否かを判別する。この判別の結果、所定量内であるときは、正しく制御が行われていると判断してステップS201からの処理に戻り、一方、所定量内でないときは、手動で雲台部3が動かされたと判断してステップS205に進む。
【0047】
一方、ステップS204では、ロータリーエンコーダ112からエンコーダ信号が出力されているか否かを判別する。この判別の結果、エンコーダ信号が出力されなかったときは、正しく制御が行われていると判断してステップS201からの処理に戻り、一方、エンコーダ信号が出力されたときは、手動で雲台部3が動かされたと判断してステップS205に進む。
【0048】
ステップS205では、バッファメモリ5aの画像を補助メモリ105に保存する。このとき保存される画像は、ステップS204からの処理の場合は、エンコーダ信号が出力された時刻の前後の画像である。また、ステップS203から進んできた場合は、エンコーダ信号が出力された時刻のうち、その出力されたエンコーダ信号から読み出した回転値と目標値の差が所定量よりも大きくなった時刻の前後の画像である。尚、このとき補助メモリ105に保存される画像の長さは、ユーザが事前に設定することができる。また、このときスピーカ5cから警報を発生する。これにより、撮像装置1を盗難もしくは破壊しようとする犯人に対して威嚇することができる。
【0049】
次に、ステップS205で補助メモリ105に保存されたデータを、通信網を介して遠隔地の情報端末に送信する(ステップS206)。これにより、撮像装置1が盗まれた場合でも、その前後の画像を遠隔地の情報端末に送信することができ、犯人を確実に特定することができる。
【0050】
その後、表示部5bに画像が保存状態であること表示して(ステップS207)、本処理を終了する。
【0051】
図4の処理によれば、撮像装置1は、ロータリーエンコーダ112から出力されたエンコーダ信号に基づいて制御された雲台部3の回転状態において、定期的に撮影された画像をバッファメモリ5aに保存する(ステップS201〜S204)。一方、雲台部3の回転状態が上記エンコーダ信号に基づいて制御されていないときに(ステップS203,S204でYES)、その信号出力時刻前後で撮影された画像をバッファメモリ5aから読み出す。その後、その読み出した画像を補助メモリ105に保持する(ステップS205)。これにより、通常動作中に用いられているロータリーエンコーダ112を異常、すなわち、手動で雲台部3が動かされたか否かを検知するセンサとしても用いることができる。さらに、異常を検知するためだけのセンサを別途撮像装置1に設けることなく、撮像装置1が破壊された場合等の犯人特定を行うことができる。
【0052】
また、ステップS204でエンコーダ信号の出力があった場合、その出力時刻において上記ステップS201における定期的な画像撮影が行われないときは、その時刻での撮像素子による画像撮影も行い、これも補助メモリ105に保存するようにしてもよい。これにより、撮像装置1は上記異常検知時の様子を確実に撮影することができる。
【0053】
また、本発明の目的は、前述した各実施の形態の機能を実現するソフトウェアのプログラムコードを記憶した記憶媒体を、システム或いは装置に供給し、そのシステム或いは装置のコンピュータ(またはCPUやMPU等)が記憶媒体に格納されたプログラムコードを読み出し実行することによっても達成される。
【0054】
この場合、記憶媒体から読み出されたプログラムコード自体が前述した各実施の形態の機能を実現することになり、そのプログラムコード及び該プログラムコードを記憶した記憶媒体は本発明を構成することになる。
【0055】
また、プログラムコードを供給するための記憶媒体としては、例えば、フロッピー(登録商標)ディスク、ハードディスク、光磁気ディスク、CD−ROM、CD−R、CD−RW、DVD−ROM、DVD−RAM、DVD−RW、DVD+RW等の光ディスク、磁気テープ、不揮発性のメモリカード、ROM等を用いることができる。または、プログラムコードをネットワークを介してダウンロードしてもよい。
【0056】
また、コンピュータが読み出したプログラムコードを実行することにより、前述した各実施の形態の機能が実現されるだけではなく、そのプログラムコードの指示に基づき、コンピュータ上で稼動しているOS(オペレーティングシステム)等が実際の処理の一部または全部を行い、その処理によって前述した各実施の形態の機能が実現される場合も含まれる。
【0057】
さらに、記憶媒体から読み出されたプログラムコードが、コンピュータに挿入された機能拡張ボードやコンピュータに接続された機能拡張ユニットに備わるメモリに書き込まれた後、そのプログラムコードの指示に基づき、その拡張機能を拡張ボードや拡張ユニットに備わるCPU等が実際の処理の一部または全部を行い、その処理によって前述した各実施の形態の機能が実現される場合も含まれる。
【図面の簡単な説明】
【0058】
【図1】本発明の実施の形態に係る撮像装置の構成を概略的に示すブロック図である。
【図2】図1における雲台部の機構を説明するのに用いられる図であり、(a)は雲台部の正面図であり、(b)は雲台部の上面図である。
【図3】撮像装置の機能構成を示すブロック図である。
【図4】撮像装置による撮影処理の手順を示すフローチャートである。
【符号の説明】
【0059】
1 撮像装置
2 カメラユニット部
3 雲台部
4 通信部
5 記録部
5a バッファメモリ
105 補助メモリ
112 ロータリーエンコーダ
【特許請求の範囲】
【請求項1】
カメラ部と、前記カメラ部を支持すると共に回転させる雲台部と、前記雲台部の回転状態を検知する検知部と、前記検知部で検知された回転状態に基づき前記雲台部の回転状態を制御する回転制御部とを備える撮像装置であって、前記制御された回転状態において定期的に前記カメラ部で撮影された画像をメモリに保持する画像保持手段を備える撮像装置において、
前記雲台部の回転状態が前記検知部で検知された回転状態に基づき制御されていないときに、当該回転状態を前記検知部が検知した検知時刻前後で撮影された画像を前記メモリから読み出し、当該画像を他のメモリに保持する他の画像保持手段を備えることを特徴とする撮像装置。
【請求項2】
前記検知時刻が前記定期的に撮影される時刻でないとき、当該検知時刻に前記カメラ部で画像を撮影し、当該画像を前記他のメモリに保持することを特徴とする請求項1記載の撮像装置。
【請求項3】
前記他のメモリに保持された画像を外部の情報処理装置に送信することを特徴とする請求項1又は2記載の撮像装置。
【請求項4】
前記検知時刻に警告音を発生することを特徴とする請求項1乃至3のいずれか1項に記載の撮像装置。
【請求項5】
前記他のメモリに画像が保持されている旨を表示する表示手段を備えることを特徴とする請求項1乃至4のいずれか1項に記載の撮像装置。
【請求項6】
カメラ部と、前記カメラ部を支持すると共に回転させる雲台部と、前記雲台部の回転状態を検知する検知部と、前記検知部で検知された回転状態に基づき前記雲台部の回転状態を制御する回転制御部とを備える撮像装置の制御方法であって、前記制御された回転状態において定期的に前記カメラ部で撮影された画像をメモリに保持する画像保持ステップを備える制御方法において、
前記雲台部の回転状態が前記検知部で検知された回転状態に基づき制御されていないときに、当該回転状態を前記検知部が検知した検知時刻前後で撮影された画像を前記メモリから読み出し、当該画像を他のメモリに保持する他の画像保持ステップを備えることを特徴とする制御方法。
【請求項7】
カメラ部と、前記カメラ部を支持すると共に回転させる雲台部と、前記雲台部の回転状態を検知する検知部と、前記検知部で検知された回転状態に基づき前記雲台部の回転状態を制御する回転制御部とを備える撮像装置の制御方法をコンピュータにより実行させるプログラムであって、前記制御された回転状態において定期的に前記カメラ部で撮影された画像をメモリに保持する画像保持モジュールを備えるプログラムにおいて、
前記雲台部の回転状態が前記検知部で検知された回転状態に基づき制御されていないときに、当該回転状態を前記検知部が検知した検知時刻前後で撮影された画像を前記メモリから読み出し、当該画像を他のメモリに保持する他の画像保持モジュールを備えることを特徴とするプログラム。
【請求項1】
カメラ部と、前記カメラ部を支持すると共に回転させる雲台部と、前記雲台部の回転状態を検知する検知部と、前記検知部で検知された回転状態に基づき前記雲台部の回転状態を制御する回転制御部とを備える撮像装置であって、前記制御された回転状態において定期的に前記カメラ部で撮影された画像をメモリに保持する画像保持手段を備える撮像装置において、
前記雲台部の回転状態が前記検知部で検知された回転状態に基づき制御されていないときに、当該回転状態を前記検知部が検知した検知時刻前後で撮影された画像を前記メモリから読み出し、当該画像を他のメモリに保持する他の画像保持手段を備えることを特徴とする撮像装置。
【請求項2】
前記検知時刻が前記定期的に撮影される時刻でないとき、当該検知時刻に前記カメラ部で画像を撮影し、当該画像を前記他のメモリに保持することを特徴とする請求項1記載の撮像装置。
【請求項3】
前記他のメモリに保持された画像を外部の情報処理装置に送信することを特徴とする請求項1又は2記載の撮像装置。
【請求項4】
前記検知時刻に警告音を発生することを特徴とする請求項1乃至3のいずれか1項に記載の撮像装置。
【請求項5】
前記他のメモリに画像が保持されている旨を表示する表示手段を備えることを特徴とする請求項1乃至4のいずれか1項に記載の撮像装置。
【請求項6】
カメラ部と、前記カメラ部を支持すると共に回転させる雲台部と、前記雲台部の回転状態を検知する検知部と、前記検知部で検知された回転状態に基づき前記雲台部の回転状態を制御する回転制御部とを備える撮像装置の制御方法であって、前記制御された回転状態において定期的に前記カメラ部で撮影された画像をメモリに保持する画像保持ステップを備える制御方法において、
前記雲台部の回転状態が前記検知部で検知された回転状態に基づき制御されていないときに、当該回転状態を前記検知部が検知した検知時刻前後で撮影された画像を前記メモリから読み出し、当該画像を他のメモリに保持する他の画像保持ステップを備えることを特徴とする制御方法。
【請求項7】
カメラ部と、前記カメラ部を支持すると共に回転させる雲台部と、前記雲台部の回転状態を検知する検知部と、前記検知部で検知された回転状態に基づき前記雲台部の回転状態を制御する回転制御部とを備える撮像装置の制御方法をコンピュータにより実行させるプログラムであって、前記制御された回転状態において定期的に前記カメラ部で撮影された画像をメモリに保持する画像保持モジュールを備えるプログラムにおいて、
前記雲台部の回転状態が前記検知部で検知された回転状態に基づき制御されていないときに、当該回転状態を前記検知部が検知した検知時刻前後で撮影された画像を前記メモリから読み出し、当該画像を他のメモリに保持する他の画像保持モジュールを備えることを特徴とするプログラム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2007−129585(P2007−129585A)
【公開日】平成19年5月24日(2007.5.24)
【国際特許分類】
【出願番号】特願2005−321513(P2005−321513)
【出願日】平成17年11月4日(2005.11.4)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成19年5月24日(2007.5.24)
【国際特許分類】
【出願日】平成17年11月4日(2005.11.4)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]