
撮像装置及びプログラム
【課題】測位情報を有効活用し、撮影時のユーザの負担を軽減して撮影ミスを回避する。
【解決手段】現在の位置を測定して位置情報を取得する測位部(26〜28,33)と、位置情報に対応した地図情報、及び撮影条件の設定情報を関連付けて複数記憶した地図データメモリ29と、画像を撮影する撮影部(11〜14)と、測位部(26〜28,33)で得た位置情報に基づいて地図データメモリ29を検索し、位置情報と関連付けて記憶された撮影条件の設定情報を取得し、取得した撮影条件の設定情報に応じて撮影部(11〜14)での撮影条件を設定するCPU20とを備える。
【解決手段】現在の位置を測定して位置情報を取得する測位部(26〜28,33)と、位置情報に対応した地図情報、及び撮影条件の設定情報を関連付けて複数記憶した地図データメモリ29と、画像を撮影する撮影部(11〜14)と、測位部(26〜28,33)で得た位置情報に基づいて地図データメモリ29を検索し、位置情報と関連付けて記憶された撮影条件の設定情報を取得し、取得した撮影条件の設定情報に応じて撮影部(11〜14)での撮影条件を設定するCPU20とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、GPS機能を備えるデジタルカメラに好適な撮像装置びプログラムに関する。
【背景技術】
【0002】
近時、GPS(Global Positioning System:全地球測位システム)機能を備えるデジタルカメラが各種製品化されている。Exif(Exchangeable image file format)規格では、デジタルカメラでGPS機能により得た測位情報(緯度、経度、高度)を、画像データに添付するメタデータの一部に含めることができる点が規定されている。したがって、撮影により記録した画像データに添付されているメタデータ中の測位情報を読出し、地図情報とリンクさせることで、例えば地図上の該当する位置に撮影画像を貼り付けた地図画像を表示させるなど、撮影した画像と撮影位置、及び地図を関連付けて表示させることが可能となる。この種の測位情報を用いた技術について特許文献でも多く提案されている。(例えば、特許文献1)
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−283347号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献の記載された技術も含めて、撮影した画像に添付された測位情報を再生モード時に使用する技術については多々提案されているものの、撮影モード時に測位情報を使用してユーザのサポートを行なうような技術については何ら提案されていない。
【0005】
近時はデジタルカメラが年々高機能化しており、各機能をユーザが使いこなすことで、撮影意図を活かした非常に表現力のある画像を撮影することが可能となっている。しかしながら、多くの機能の内容を把握した上でそれらを使いこなすことは、一般的なユーザには困難であり、多くの機能をユーザに理解し易い形で提示し、容易に設定可能とするユーザインターフェイスが求められている。
【0006】
本発明は上記のような実情に鑑みてなされたもので、その目的とするところは、測位情報を有効に活用し、画像撮影時のユーザの負担を軽減して撮影ミスを回避することが可能な撮像装置及びプログラムを提供することにある。
【課題を解決するための手段】
【0007】
本発明の一態様は、現在の位置を測定して位置情報を取得する測位手段と、位置情報に対応した地図情報、及び撮影条件の設定情報を関連付けて複数記憶した地図記憶手段と、画像を撮影する撮影手段と、上記測位手段で得た位置情報に基づいて上記地図記憶手段を検索し、位置情報と関連付けて記憶された撮影条件の設定情報を取得し、取得した撮影条件の設定情報に応じて上記撮影手段での撮影条件を設定する撮影制御手段とを具備したことを特徴とする。
【発明の効果】
【0008】
本発明によれば、測位情報を有効に活用し、画像撮影時のユーザの負担を軽減して撮影ミスを回避することが可能となる。
【図面の簡単な説明】
【0009】
【図1】本発明の一実施形態に係るデジタルカメラの機能構成を示すブロック図。
【図2】同実施形態に係る地図データメモリに記憶される地点設定テーブルの内容を例示する図。
【図3】同実施形態に係る撮影モード時の画像転送の処理内容を示すフローチャート。
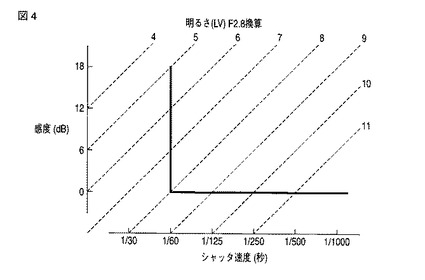
【図4】同実施形態に係る交流電源周波数60[Hz]の環境下で使用する露出プログラム線図。
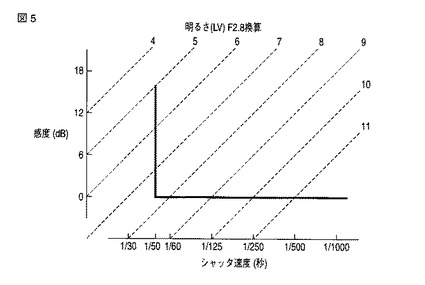
【図5】同実施形態に係る交流電源周波数50[Hz]の環境下で使用する露出プログラム線図。
【発明を実施するための形態】
【0010】
以下、本発明をデジタルカメラに適用した場合の一実施形態について図面を参照して説明する。
【0011】
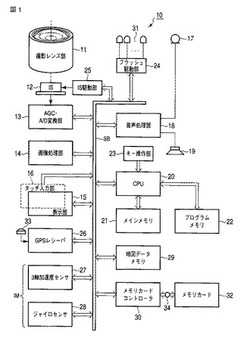
図1は、本実施形態に係るデジタルカメラ10の回路構成を示すものである。同図では、カメラ筐体の前面に配設される撮影レンズ部11を介して、固体撮像素子、例えばCMOSイメージセンサ(IS)12の撮像面上に被写体の光像を入射して結像させる。
【0012】
スルー画像表示、あるいはライブビュー画像表示とも称されるモニタ状態では、このCMOSイメージセンサ12での撮像により得た画像信号をAGC・A/D変換部13に送る。AGC・A/D変換部13は、アナログの画像信号に対して相関二乗サンプリングや自動ゲイン調整、A/D変換処理を実行してデジタル化する。このデジタル値の画像データはシステムバスSBを介して画像処理部14に送る。
【0013】
画像処理部14は、画像データに対して適宜必要な画像処理を施す。すなわち画像処理部14では、上記CMOSイメージセンサ12が備えるベイヤー配列のカラーフィルタの構成に応じた画像データ(以下「RAW(生)データ」と称する)に対してデジタル現像処理、具体的には画素補間処理、ガンマ補正処理、マトリックス演算等のデモザイク処理を施すことで、輝度色差系(YUV)の画像データに変換する。
【0014】
画像処理部14は、現像後の画像データから表示用に画素数及び階調ビットを大幅に減じた画像データを作成し、システムバスSBを介して表示部15へ送る。表示部15では、送られてきた画像データに基づいてスルー画像を表示する。
【0015】
表示部15は、カメラ筐体の背面側に設けられ、例えばバックライト付きのカラー液晶パネルとそのコントローラとで構成される。この表示部15の画面上部に一体にして透明導電膜を用いたタッチ入力部16が構成される。
【0016】
このタッチ入力部16でユーザが手指等で表面をタッチ操作すると、タッチ入力部16では操作された座標位置を算出し、算出した座標信号を上記システムバスSBを介して後述するCPU20に送出する。
【0017】
また、上記撮影レンズ部11と同じくカメラ筐体前面には、マイクロホン17が配設され、被写体方向の音声が入力される。マイクロホン17は入力した音声を電気信号化し、音声処理部18へ出力する。
【0018】
音声処理部18は、音声単体での録音時、音声付き静止画像撮影時、及び動画像の撮影時にマイクロホン17から入力する音声信号をデジタルデータ化する。さらに音声処理部18は、デジタル化した音声データの音圧レベルを検出する一方で、該音声データを所定のデータファイル形式、例えばAAC(moving picture experts group−4 Advanced Audio Coding)形式でデータ圧縮して音声データファイルを作成し、後述する記録媒体へ送出する。
【0019】
加えて音声処理部18は、PCM音源等の音源回路を備え、音声の再生時に送られてくる音声データファイルの圧縮を解いてアナログ化し、このデジタルカメラ10の筐体背面側に設けられるスピーカ19を駆動して、放音させる。
【0020】
以上の回路をCPU20が統括して制御する。このCPU20は、メインメモリ21、プログラムメモリ22と直接接続される。メインメモリ21は、例えばSRAMで構成され、ワークメモリとして機能する。プログラムメモリ22は、例えばフラッシュメモリなどの電気的に書換可能な不揮発性メモリで構成され、後述する撮影モード時の撮影条件の設定動作を含む各種動作プログラムや後述する露出プログラム線図データ、各種データ等を固定的に記憶する。
【0021】
CPU20はプログラムメモリ22から必要なプログラムやデータ等を読出し、メインメモリ21に適宜一時的に展開して記憶させながら、このデジタルカメラ10全体の制御動作を実行する。
【0022】
さらに上記CPU20は、キー操作部23から直接入力される各種キー操作信号、及び上記タッチ入力部16からのタッチ操作に応じた座標信号に対応して制御動作を実行する。
【0023】
キー操作部23は、例えば電源キー、シャッタレリーズキー、ズームアップ/ダウンキー、撮影モードキー、再生モードキー、メニューキー、カーソル(「↑」「→」「↓」「←」)キー、セットキー、解除キー、ディスプレイキー等を備える。
【0024】
CPU20は、システムバスSBを介して上記AGC・A/D変換部13、画像処理部14、表示部15、タッチ入力部16、及び音声処理部18の他、さらにフラッシュ駆動部24、イメージセンサ(IS)駆動部25、GPSレシーバ26、3軸加速度センサ27、ジャイロセンサ28、地図データメモリ29、及びメモリカードコントローラ30と接続される。
【0025】
フラッシュ駆動部24は、静止画像撮影時にCPU20からの制御信号を受けて、複数の白色高輝度LEDで構成されるフラッシュ部31を撮影タイミングに同期して点灯駆動する。
【0026】
イメージセンサ駆動部25は、その時点で設定されている撮影条件等に応じて上記CMOSイメージセンサ12の走査駆動を行なう。
【0027】
上記画像処理部14は、上記キー操作部23のシャッタレリーズキー操作に伴う画像撮影時に、AGC・A/D変換部13から送られてくる画像データをデモザイク処理し、さらに所定のデータファイル形式、例えばJPEG(Joint Photographic Experts Group)であればDCT(離散コサイン変換)やハフマン符号化等のデータ圧縮処理を施してデータ量を大幅に削減した画像データファイルを作成する。作成した画像データファイルは、システムバスSB、上記メモリカードコントローラ30を介してメモリカード32に転送し、ここで保存される。
【0028】
また画像処理部14は、再生モード時にメモリカード32からメモリカードコントローラ30を介して読出されてくる画像データをシステムバスSBを介して受取る。画像処理部14は、この受取った画像データを記録時とは逆の手順で圧縮を解く伸長処理により元のサイズの画像データを得、得た画像データのデータ量を減じた後にシステムバスSBを介して表示部15で表示させる。
GPSレシーバ26は、GPSアンテナ33で受信した、図示しない複数(原理上は最低4個)のGPS衛星からの到来電波に基づいて現在位置の3次元情報(緯度、経度、高度)と正確な現在時刻とを算出する。
【0029】
3軸加速度センサ27は、例えばピエゾ抵抗型の半導体加速度センサで構成される。この3軸加速度センサ27の出力により、撮影時の手ブレ補正用のデジタルカメラ10の移動方向と加速度を検出できる。
【0030】
また3軸加速度センサ27は、上記ジャイロセンサ28と組合わせて慣性計測部IMを構成する。ジャイロセンサ28は、例えば音叉型の振動片に働くコリオリの力から角速度を検出する。
【0031】
ジャイロセンサ28で方角を、3軸加速度センサ27で加速度を求め、それらを積分することでデジタルカメラ10の移動に伴う速度が、同速度を積分することでデジタルカメラ10の移動に伴う距離を算出できる。
【0032】
したがって、GPS衛星からの到来電波を受信することができない屋内やトンネル内、高層ビルディングに挟まれた谷間などにおいては、最後にGPS衛星からの到来電波を受信して算出した3次元情報に対して、上記慣性計測部IMの出力を累積して内容を更新することで、自律航法により現在位置を継続して取得することができる。
【0033】
地図データメモリ29は、3次元情報と関連付けて世界主要都市及び日本各地の地図データを記憶する。地図データは、地形情報、道路、建造物、レジャー施設、公園、名所、美術館、博物館、観光施設、神社、仏閣、各種店舗、宿泊施設、鉄道駅、港、空港等を含む。
【0034】
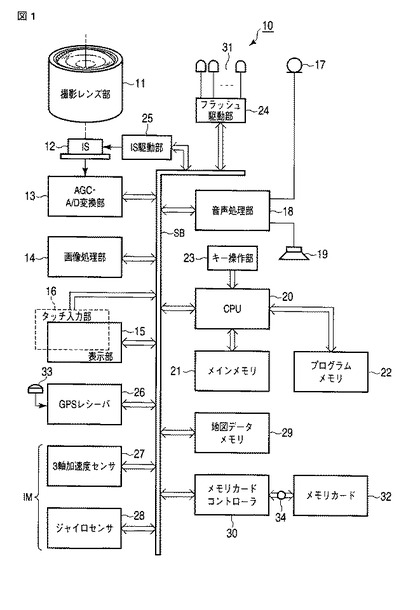
さらに地図データメモリ29は、上記3次元情報と関連付けられた地図データの他に、図2に示す地点設定テーブルを記憶する。図示するように地点設定テーブルは、地点名称データと関連付けて、撮影地点の施設の属性に応じた撮影地点設定情報を2つと、撮影地点を含む周囲環境の属性に応じた撮影環境設定情報1つを組み合わせて、複数の地点名称データに対応するように構成されたテーブルである。
【0035】
上記2つの撮影地点設定情報(撮影地点設定1,2)と撮影環境設定情報(撮影環境設定)はいずれも、設定種別コードとその設定値とから構成される。
例えば地点名称データ「A海岸、A高原、A公園、A植物園」は、4点の地点名称データ「A海岸」「A高原」「A公園」及び「A植物園」に共通した設定内容を示すもので、第1の撮影地点設定情報(撮影地点設定1)で設定種別コード「彩度」の設定値が「強」、第2の撮影地点設定情報(撮影地点設定2)が未使用、撮影環境設定情報(撮影環境設定)で設定種別コード「国別好み色」の設定値が「日本色」となっている。
【0036】
このことから、このカメラを使用するユーザが「A海岸」「A高原」「A公園」及び「A植物園」のいずれかで撮影を行なう場合には、その位置に到達した時点でCPU20が「彩度」の設定値を「日本色」に応じて「強調」するように自動的に設定する。この設定により具体的には、CPU20の制御の下に画像処理部14がデモザイク処理を施す過程で青色の彩度が強調されて画像データが処理される。
【0037】
上記メモリカードコントローラ30は、カードコネクタ34に装着されたメモリカード32と接続される。メモリカード32は、このデジタルカメラ10に着脱自在に装着され、このデジタルカメラ10の記録媒体となる、画像ファイル等の記録用メモリである。メモリカード32は、内部に不揮発性メモリであるフラッシュメモリと、その駆動回路とが設けられる。
【0038】
次に上記実施形態の動作について説明する。
なお以下に示す動作は、デジタルカメラ10の電源投入状態に関係なく、一定時間間隔、例えば1分毎にCPU20の制御の下に実行する、現在位置に応じた撮影条件の設定処理の内容を示す。CPU20はプログラムメモリ22に記憶されている動作プログラムやフラグ、地図データメモリ29に記憶している図2の地点設定テーブルを読出し、メインメモリ21に展開して記憶させた上で該動作プログラムを実行する。
【0039】
プログラムメモリ22に記憶されている動作プログラム、地図データメモリ29に記憶されている地図データや地点設定テーブル等は、このデジタルカメラ10の製造工場出荷時にそれらに記憶されていたものに加え、例えばこのデジタルカメラ10のバージョンアップに際して、デジタルカメラ10を図示しないパーソナルコンピュータと接続し、あるいは更新プログラムを記憶したメモリカード32を一時的にカードコネクタ34に装着することにより外部から新たな動作プログラム、地点設定テーブルを含む制御用のデータ、地図データ等をインストールするものも含む。
【0040】
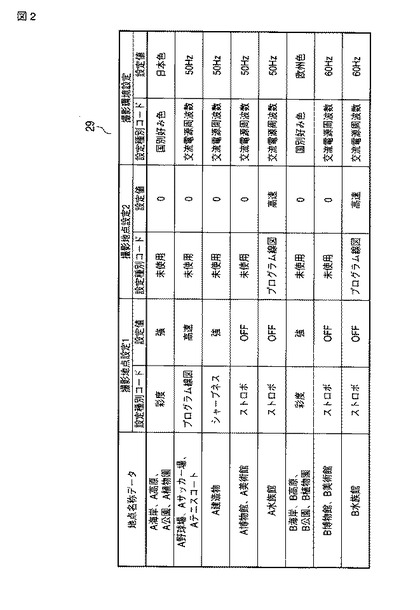
図3においてCPU20は、GPSレシーバ26がGPSアンテナ33で受信したGPS衛星からの到来電波により算出する現在位置の3次元情報か、またはGPS衛星からの電波が受信できない場合に慣性計測部IMより取得する、自律航法による3次元情報を取得する(ステップS101)。
【0041】
取得した3次元情報に基づいてCPU20は、必要により現在位置を更新記憶した上で、地図データメモリ29に記憶される地図データを検索して(ステップS102)、該当する地点名称データが存在するか否かを判断する(ステップS103)。
【0042】
ここで該当する地点名称データが存在し、したがって対応する撮影地点設定情報または撮影環境設定情報があると判断した場合、CPU20は次いで地点設定テーブルの該当する地点名称データに対して設定されている、第1の撮影地点設定情報(撮影地点設定1)の設定種別コードに関して、現状すでに設定されている内容があればそれを一旦メインメモリ21にバックアップとして記憶させた上で、あらためてテーブルから読出した設定値を設定する(ステップS104)。
【0043】
例えば、現在位置が「Aサッカー場」であった場合、第1の撮影地点設定情報(撮影地点設定1)の設定種別コードとして「(露出)プログラム線図」、その設定値として「高速」が読出され、それを設定する。
【0044】
したがって、シャッタ速度優先の露出プログラムで可能な限り絞りF値を開放側に設定し、シャッタ速度をより高速に設定するための露出プログラム線図がプログラムメモリ22より読出されて設定される。
【0045】
次にCPU20は、地点設定テーブルの該当する地点名称データに対して設定されている、第2の撮影地点設定情報(撮影地点設定2)の設定種別コードに関して、これも現状すでに設定されている内容があればそれを一旦メインメモリ21にバックアップとして記憶させた上で、あらためてテーブルから読出した設定値を設定する(ステップS105)。
【0046】
例えば、現在位置が上述した「Aサッカー場」であった場合、第2の撮影地点設定情報(撮影地点設定2)の設定種別コードは「未使用」であり、その設定値は「0」であるため、この場合の設定処理は省略する。
【0047】
その後CPU20はさらに、地点設定テーブルの該当する地点名称データに対して設定されている、撮影環境設定情報の設定種別コードに関してテーブルから読出した設定値を設定する(ステップS106)。
【0048】
例えば、現在位置が「Aサッカー場」であった場合、撮影環境設定情報の設定種別コードとして「交流電源周波数」、その設定値として「50[Hz]」が読出され、それを設定する。
【0049】
この場合、先ほど設定した露出プログラム線図に上書きして、最低シャッタ速度を「1/50[秒]」に限定するよう露出プログラム線図を書き換える。
【0050】
図5は、このときの露出プログラム線図の内容を例示している。同図では、明るさ(LV)がF値2.8換算として、最低シャッタ速度を「1/50[秒]」に限定することで、屋内や、屋外であっても光源、または補助的な光源に蛍光管やその他、交流駆動の放電管などを使用する場合のちらつきの影響を排除するものとしている。
【0051】
図4は、上記と同様の考え方で、設定種別コード「交流電源周波数」の設定値が「60[Hz]」である場合の、露出プログラム線図の内容を例示する。例えば日本国内であれば西日本における撮影環境設定情報として、最低シャッタ速度を「1/60[秒]」に限定するよう露出プログラム線図を設定することで、交流駆動の光源を使用する場合のちらつきの影響を排除する。
【0052】
以上のようにその地点名称データに応じた第1の撮影地点設定情報(撮影地点設定1)、第2の撮影地点設定情報(撮影地点設定2)、及び撮影環境設定情報で予め定められた設定を自動的に行なった後、メインメモリ21に設ける設定フラグレジスタをセット状態を示す「1」とし(ステップS107)、以上でこの図3の一連の処理を一旦終了する。
【0053】
また上記ステップS103で該当する地点名称データが存在せず、対応する撮影地点設定情報または撮影環境設定情報がないと判断した場合、CPU20は次にその時点でメインメモリ21に設けた設定フラグレジスタがセット状態にあるか否かを判断する(ステップS108)。
【0054】
ここで設定フラグレジスタがセット状態にはないと判断した場合には、そのままこの図3の一連の処理を一旦終了する。
【0055】
また上記ステップS108で設定フラグレジスタがセット状態にあると判断した場合には、直前の同図3の処理により設定フラグがセットされており、地点名称データが存在する地点から移動してきたことになるため、CPU20は次いでそれまでバックアップとして記憶させていた第1の撮影地点設定情報(撮影地点設定1)の設定種別コードとその設定値とを読出して再設定させる(ステップS109)。
【0056】
続いてCPU20は、同様にそれまでバックアップとして記憶させていた第2の撮影地点設定情報(撮影地点設定2)の設定種別コードとその設定値とを読出して再設定させる(ステップS110)。
【0057】
その後CPU20は、メインメモリ21に設ける設定フラグレジスタのセット状態をクリアして「0」とし(ステップS111)、以上でこの図3の一連の処理を一旦終了する。
【0058】
上述したように2つの撮影地点設定情報を設定可能とし、図2でもそれらの一部を示したように彩度、(露出)プログラム線図、フォーカス設定、フォーカスエリア、ISO感度、ホワイトバランス調整、コントラスト、シャープネス、露出補正、測光方式、ダイナミックレンジ拡大、及びカラーフィルタなどの項目を最大2つ組み合わせてそれぞれ設定可能とした。
【0059】
このように、地点名称データ毎に適切と思われる設定項目を最大2つ選択して撮影条件の設定を可能としたことにより、各地点名称データ毎に全項目を個別に設定する場合に比して、地点設定テーブルに必要なデータ容量を最小限に抑えながら、その地点での撮影で有効と考えられる設定を効率的に設定することができる。
【0060】
加えて、上記地点名称データ毎に対応する撮影地点設定情報とは別に、撮影環境設定情報として、例えば図2でもそれらの一部を示したように国別に好みが異なると思われている色や、地域、国等によって異なる交流電源周波数等、より大きな環境に関連した項目を組み合わせて設定可能とした。
【0061】
このように、上記地点毎に異なる撮影条件とは別に、より大きな範囲を撮影環境設定情報として合わせて設定可能としたことで、地点設定テーブルに必要なデータ容量の無闇な拡大を防ぎながらも、よりきめ細かく撮影ミスを確実に回避できるような設定を実現できる。
【0062】
したがって、実際の撮影モードにおいては、ユーザがシーンプログラム機能等により意図して撮影条件を設定する場合を除いて、上記のように自動的に設定した撮影条件で撮影が実行される。
【0063】
以上詳述した如く本実施形態によれば、測位情報を有効に活用し、画像撮影時のユーザの負担を軽減して撮影ミスを回避することが可能となる。
【0064】
また上記実施形態では、撮影条件の設定情報として、撮影地点の施設等の属性に応じた設定情報と、撮影地点を含む周囲環境の属性に応じた設定情報とを組み合わせて設定可能としたことにより、設定すべき情報量を抑制しながら、状況に対応した適切な撮影条件の設定を実現できる。
【0065】
さらに上記実施形態では、撮影地点が屋内、あるいはそれに準じた交流電源周波数の影響を受ける光源にあると思われる環境下では、交流電源周波数の情報を含むものとしたため、光源によるちらつき(フリッカ)の影響を確実に回避できる。
【0066】
また上記実施形態では、現在位置を測定する手段として、GPS機能と慣性計測部IMによる自律航法とを組み合わせるものとしたので、GPS衛星からの電波を受けることができない室内等の環境下でも測位を継続でき、例えば室内が複数の施設に区分されているような場合でもその施設毎に最適な撮影条件を設定することができる。
【0067】
さらに上記実施形態では、地図データメモリ29で記憶する地点名称データで示される位置に至る前の撮影条件の設定情報をバックアップして記憶し、地点名称データで示される位置を外れた場合にはバックアップした撮影条件の設定情報を自動的に再設定するものとしたので、ユーザが任意に設定した撮影条件の設定情報を消去せず、ユーザに対して再設定のために手間を煩わせることがないので、地点名称データで示される位置に入る前後でのユーザにとっての利便性を低下させることがない。
【0068】
なお上記実施形態はデジタルカメラに適用した場合について説明したものであるが、本発明はこれに限らず、カメラ機能を有する携帯電話端末や電子ブック、スマートフォン等であっても同様に適用可能である。
【0069】
その他、本発明は上述した実施形態に限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で種々に変形することが可能である。また、上述した実施形態で実行される機能は可能な限り適宜組み合わせて実施しても良い。上述した実施形態には種々の段階が含まれており、開示される複数の構成要件による適宜の組み合せにより種々の発明が抽出され得る。例えば、実施形態に示される全構成要件からいくつかの構成要件が削除されても、効果が得られるのであれば、この構成要件が削除された構成が発明として抽出され得る。
【0070】
以下に、本願出願の当所の特許請求の範囲に記載された発明を付記する。
請求項1記載の発明は、現在の位置を測定して位置情報を取得する測位手段と、位置情報に対応した地図情報、及び撮影条件の設定情報を関連付けて複数記憶した地図記憶手段と、画像を撮影する撮影手段と、上記測位手段で得た位置情報に基づいて上記地図記憶手段を検索し、位置情報と関連付けて記憶された撮影条件の設定情報を取得し、取得した撮影条件の設定情報に応じて上記撮影手段での撮影条件を設定する撮影制御手段とを具備したことを特徴とする。
【0071】
請求項2記載の発明は、上記請求項1記載の発明において、上記撮影条件の設定情報は、撮影地点の施設の属性に応じた設定情報と撮影地点を含む周囲環境の属性に応じた設定情報とを組み合わせて構成することを特徴とする。
【0072】
請求項3記載の発明は、上記請求項2記載の発明において、上記撮影地点を含む周囲環境の属性に応じた設定情報は交流電源周波数の情報を含むことを特徴とする。
【0073】
請求項4記載の発明は、上記請求項1記載の発明において、上記測位手段は、複数の衛星からの到来電波を受信して現在の3次元空間中の位置を算出する第1の測位手段と、装置の移動と回転に伴う変位を検出してその累積から慣性計測手法により現在の位置を計測する第2の測位手段とを有することを特徴とする。
【0074】
請求項5記載の発明は、上記請求項1記載の発明において、上記撮影条件の設定情報をバックアップして記憶するバックアップ記憶手段をさらに具備し、上記撮影制御手段は、上記測位手段で得る位置情報が上記地図記憶手段で記憶する位置情報で示される範囲に入る前後で上記バックアップ記憶手段を用い、該範囲に入る前に使用していた撮影条件の設定情報を該範囲を出た後に継続して使用することを特徴とする。
【0075】
請求項6記載の発明は、現在の位置を測定して位置情報を取得する測位部、位置情報に対応した地図情報、及び撮影条件の設定情報を関連付けて複数記憶した地図記憶部、及び画像を撮影する撮影部を備えた装置が内蔵するコンピュータが実行するプログラムであって、上記測位部で得た位置情報に基づいて上記地図記憶部を検索し、位置情報と関連付けて記憶された撮影条件の設定情報を取得し、取得した撮影条件の設定情報に応じて上記撮影部での撮影条件を設定する撮影制御機能を実現させることを特徴とする。
【符号の説明】
【0076】
10…デジタルカメラ、11…撮影レンズ部、12…CMOSイメージセンサ、13…AGC・A/D変換部、14…画像処理部、15…表示部、16…タッチ入力部、17…マイクロホン、18…音声処理部、19…スピーカ、20…CPU、21…メインメモリ、22…プログラムメモリ、23…キー操作部、24…フラッシュ駆動部、25…イメージセンサ駆動部、26…GPSレシーバ、27…3軸加速度センサ、28…ジャイロセンサ、29…地図データメモリ、30…メモリカードコントローラ、31…フラッシュ部、32…メモリカード、33…GPSアンテナ、34…カードコネクタ、IM…慣性計測部、SB…システムバス。
【技術分野】
【0001】
本発明は、GPS機能を備えるデジタルカメラに好適な撮像装置びプログラムに関する。
【背景技術】
【0002】
近時、GPS(Global Positioning System:全地球測位システム)機能を備えるデジタルカメラが各種製品化されている。Exif(Exchangeable image file format)規格では、デジタルカメラでGPS機能により得た測位情報(緯度、経度、高度)を、画像データに添付するメタデータの一部に含めることができる点が規定されている。したがって、撮影により記録した画像データに添付されているメタデータ中の測位情報を読出し、地図情報とリンクさせることで、例えば地図上の該当する位置に撮影画像を貼り付けた地図画像を表示させるなど、撮影した画像と撮影位置、及び地図を関連付けて表示させることが可能となる。この種の測位情報を用いた技術について特許文献でも多く提案されている。(例えば、特許文献1)
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−283347号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献の記載された技術も含めて、撮影した画像に添付された測位情報を再生モード時に使用する技術については多々提案されているものの、撮影モード時に測位情報を使用してユーザのサポートを行なうような技術については何ら提案されていない。
【0005】
近時はデジタルカメラが年々高機能化しており、各機能をユーザが使いこなすことで、撮影意図を活かした非常に表現力のある画像を撮影することが可能となっている。しかしながら、多くの機能の内容を把握した上でそれらを使いこなすことは、一般的なユーザには困難であり、多くの機能をユーザに理解し易い形で提示し、容易に設定可能とするユーザインターフェイスが求められている。
【0006】
本発明は上記のような実情に鑑みてなされたもので、その目的とするところは、測位情報を有効に活用し、画像撮影時のユーザの負担を軽減して撮影ミスを回避することが可能な撮像装置及びプログラムを提供することにある。
【課題を解決するための手段】
【0007】
本発明の一態様は、現在の位置を測定して位置情報を取得する測位手段と、位置情報に対応した地図情報、及び撮影条件の設定情報を関連付けて複数記憶した地図記憶手段と、画像を撮影する撮影手段と、上記測位手段で得た位置情報に基づいて上記地図記憶手段を検索し、位置情報と関連付けて記憶された撮影条件の設定情報を取得し、取得した撮影条件の設定情報に応じて上記撮影手段での撮影条件を設定する撮影制御手段とを具備したことを特徴とする。
【発明の効果】
【0008】
本発明によれば、測位情報を有効に活用し、画像撮影時のユーザの負担を軽減して撮影ミスを回避することが可能となる。
【図面の簡単な説明】
【0009】
【図1】本発明の一実施形態に係るデジタルカメラの機能構成を示すブロック図。
【図2】同実施形態に係る地図データメモリに記憶される地点設定テーブルの内容を例示する図。
【図3】同実施形態に係る撮影モード時の画像転送の処理内容を示すフローチャート。
【図4】同実施形態に係る交流電源周波数60[Hz]の環境下で使用する露出プログラム線図。
【図5】同実施形態に係る交流電源周波数50[Hz]の環境下で使用する露出プログラム線図。
【発明を実施するための形態】
【0010】
以下、本発明をデジタルカメラに適用した場合の一実施形態について図面を参照して説明する。
【0011】
図1は、本実施形態に係るデジタルカメラ10の回路構成を示すものである。同図では、カメラ筐体の前面に配設される撮影レンズ部11を介して、固体撮像素子、例えばCMOSイメージセンサ(IS)12の撮像面上に被写体の光像を入射して結像させる。
【0012】
スルー画像表示、あるいはライブビュー画像表示とも称されるモニタ状態では、このCMOSイメージセンサ12での撮像により得た画像信号をAGC・A/D変換部13に送る。AGC・A/D変換部13は、アナログの画像信号に対して相関二乗サンプリングや自動ゲイン調整、A/D変換処理を実行してデジタル化する。このデジタル値の画像データはシステムバスSBを介して画像処理部14に送る。
【0013】
画像処理部14は、画像データに対して適宜必要な画像処理を施す。すなわち画像処理部14では、上記CMOSイメージセンサ12が備えるベイヤー配列のカラーフィルタの構成に応じた画像データ(以下「RAW(生)データ」と称する)に対してデジタル現像処理、具体的には画素補間処理、ガンマ補正処理、マトリックス演算等のデモザイク処理を施すことで、輝度色差系(YUV)の画像データに変換する。
【0014】
画像処理部14は、現像後の画像データから表示用に画素数及び階調ビットを大幅に減じた画像データを作成し、システムバスSBを介して表示部15へ送る。表示部15では、送られてきた画像データに基づいてスルー画像を表示する。
【0015】
表示部15は、カメラ筐体の背面側に設けられ、例えばバックライト付きのカラー液晶パネルとそのコントローラとで構成される。この表示部15の画面上部に一体にして透明導電膜を用いたタッチ入力部16が構成される。
【0016】
このタッチ入力部16でユーザが手指等で表面をタッチ操作すると、タッチ入力部16では操作された座標位置を算出し、算出した座標信号を上記システムバスSBを介して後述するCPU20に送出する。
【0017】
また、上記撮影レンズ部11と同じくカメラ筐体前面には、マイクロホン17が配設され、被写体方向の音声が入力される。マイクロホン17は入力した音声を電気信号化し、音声処理部18へ出力する。
【0018】
音声処理部18は、音声単体での録音時、音声付き静止画像撮影時、及び動画像の撮影時にマイクロホン17から入力する音声信号をデジタルデータ化する。さらに音声処理部18は、デジタル化した音声データの音圧レベルを検出する一方で、該音声データを所定のデータファイル形式、例えばAAC(moving picture experts group−4 Advanced Audio Coding)形式でデータ圧縮して音声データファイルを作成し、後述する記録媒体へ送出する。
【0019】
加えて音声処理部18は、PCM音源等の音源回路を備え、音声の再生時に送られてくる音声データファイルの圧縮を解いてアナログ化し、このデジタルカメラ10の筐体背面側に設けられるスピーカ19を駆動して、放音させる。
【0020】
以上の回路をCPU20が統括して制御する。このCPU20は、メインメモリ21、プログラムメモリ22と直接接続される。メインメモリ21は、例えばSRAMで構成され、ワークメモリとして機能する。プログラムメモリ22は、例えばフラッシュメモリなどの電気的に書換可能な不揮発性メモリで構成され、後述する撮影モード時の撮影条件の設定動作を含む各種動作プログラムや後述する露出プログラム線図データ、各種データ等を固定的に記憶する。
【0021】
CPU20はプログラムメモリ22から必要なプログラムやデータ等を読出し、メインメモリ21に適宜一時的に展開して記憶させながら、このデジタルカメラ10全体の制御動作を実行する。
【0022】
さらに上記CPU20は、キー操作部23から直接入力される各種キー操作信号、及び上記タッチ入力部16からのタッチ操作に応じた座標信号に対応して制御動作を実行する。
【0023】
キー操作部23は、例えば電源キー、シャッタレリーズキー、ズームアップ/ダウンキー、撮影モードキー、再生モードキー、メニューキー、カーソル(「↑」「→」「↓」「←」)キー、セットキー、解除キー、ディスプレイキー等を備える。
【0024】
CPU20は、システムバスSBを介して上記AGC・A/D変換部13、画像処理部14、表示部15、タッチ入力部16、及び音声処理部18の他、さらにフラッシュ駆動部24、イメージセンサ(IS)駆動部25、GPSレシーバ26、3軸加速度センサ27、ジャイロセンサ28、地図データメモリ29、及びメモリカードコントローラ30と接続される。
【0025】
フラッシュ駆動部24は、静止画像撮影時にCPU20からの制御信号を受けて、複数の白色高輝度LEDで構成されるフラッシュ部31を撮影タイミングに同期して点灯駆動する。
【0026】
イメージセンサ駆動部25は、その時点で設定されている撮影条件等に応じて上記CMOSイメージセンサ12の走査駆動を行なう。
【0027】
上記画像処理部14は、上記キー操作部23のシャッタレリーズキー操作に伴う画像撮影時に、AGC・A/D変換部13から送られてくる画像データをデモザイク処理し、さらに所定のデータファイル形式、例えばJPEG(Joint Photographic Experts Group)であればDCT(離散コサイン変換)やハフマン符号化等のデータ圧縮処理を施してデータ量を大幅に削減した画像データファイルを作成する。作成した画像データファイルは、システムバスSB、上記メモリカードコントローラ30を介してメモリカード32に転送し、ここで保存される。
【0028】
また画像処理部14は、再生モード時にメモリカード32からメモリカードコントローラ30を介して読出されてくる画像データをシステムバスSBを介して受取る。画像処理部14は、この受取った画像データを記録時とは逆の手順で圧縮を解く伸長処理により元のサイズの画像データを得、得た画像データのデータ量を減じた後にシステムバスSBを介して表示部15で表示させる。
GPSレシーバ26は、GPSアンテナ33で受信した、図示しない複数(原理上は最低4個)のGPS衛星からの到来電波に基づいて現在位置の3次元情報(緯度、経度、高度)と正確な現在時刻とを算出する。
【0029】
3軸加速度センサ27は、例えばピエゾ抵抗型の半導体加速度センサで構成される。この3軸加速度センサ27の出力により、撮影時の手ブレ補正用のデジタルカメラ10の移動方向と加速度を検出できる。
【0030】
また3軸加速度センサ27は、上記ジャイロセンサ28と組合わせて慣性計測部IMを構成する。ジャイロセンサ28は、例えば音叉型の振動片に働くコリオリの力から角速度を検出する。
【0031】
ジャイロセンサ28で方角を、3軸加速度センサ27で加速度を求め、それらを積分することでデジタルカメラ10の移動に伴う速度が、同速度を積分することでデジタルカメラ10の移動に伴う距離を算出できる。
【0032】
したがって、GPS衛星からの到来電波を受信することができない屋内やトンネル内、高層ビルディングに挟まれた谷間などにおいては、最後にGPS衛星からの到来電波を受信して算出した3次元情報に対して、上記慣性計測部IMの出力を累積して内容を更新することで、自律航法により現在位置を継続して取得することができる。
【0033】
地図データメモリ29は、3次元情報と関連付けて世界主要都市及び日本各地の地図データを記憶する。地図データは、地形情報、道路、建造物、レジャー施設、公園、名所、美術館、博物館、観光施設、神社、仏閣、各種店舗、宿泊施設、鉄道駅、港、空港等を含む。
【0034】
さらに地図データメモリ29は、上記3次元情報と関連付けられた地図データの他に、図2に示す地点設定テーブルを記憶する。図示するように地点設定テーブルは、地点名称データと関連付けて、撮影地点の施設の属性に応じた撮影地点設定情報を2つと、撮影地点を含む周囲環境の属性に応じた撮影環境設定情報1つを組み合わせて、複数の地点名称データに対応するように構成されたテーブルである。
【0035】
上記2つの撮影地点設定情報(撮影地点設定1,2)と撮影環境設定情報(撮影環境設定)はいずれも、設定種別コードとその設定値とから構成される。
例えば地点名称データ「A海岸、A高原、A公園、A植物園」は、4点の地点名称データ「A海岸」「A高原」「A公園」及び「A植物園」に共通した設定内容を示すもので、第1の撮影地点設定情報(撮影地点設定1)で設定種別コード「彩度」の設定値が「強」、第2の撮影地点設定情報(撮影地点設定2)が未使用、撮影環境設定情報(撮影環境設定)で設定種別コード「国別好み色」の設定値が「日本色」となっている。
【0036】
このことから、このカメラを使用するユーザが「A海岸」「A高原」「A公園」及び「A植物園」のいずれかで撮影を行なう場合には、その位置に到達した時点でCPU20が「彩度」の設定値を「日本色」に応じて「強調」するように自動的に設定する。この設定により具体的には、CPU20の制御の下に画像処理部14がデモザイク処理を施す過程で青色の彩度が強調されて画像データが処理される。
【0037】
上記メモリカードコントローラ30は、カードコネクタ34に装着されたメモリカード32と接続される。メモリカード32は、このデジタルカメラ10に着脱自在に装着され、このデジタルカメラ10の記録媒体となる、画像ファイル等の記録用メモリである。メモリカード32は、内部に不揮発性メモリであるフラッシュメモリと、その駆動回路とが設けられる。
【0038】
次に上記実施形態の動作について説明する。
なお以下に示す動作は、デジタルカメラ10の電源投入状態に関係なく、一定時間間隔、例えば1分毎にCPU20の制御の下に実行する、現在位置に応じた撮影条件の設定処理の内容を示す。CPU20はプログラムメモリ22に記憶されている動作プログラムやフラグ、地図データメモリ29に記憶している図2の地点設定テーブルを読出し、メインメモリ21に展開して記憶させた上で該動作プログラムを実行する。
【0039】
プログラムメモリ22に記憶されている動作プログラム、地図データメモリ29に記憶されている地図データや地点設定テーブル等は、このデジタルカメラ10の製造工場出荷時にそれらに記憶されていたものに加え、例えばこのデジタルカメラ10のバージョンアップに際して、デジタルカメラ10を図示しないパーソナルコンピュータと接続し、あるいは更新プログラムを記憶したメモリカード32を一時的にカードコネクタ34に装着することにより外部から新たな動作プログラム、地点設定テーブルを含む制御用のデータ、地図データ等をインストールするものも含む。
【0040】
図3においてCPU20は、GPSレシーバ26がGPSアンテナ33で受信したGPS衛星からの到来電波により算出する現在位置の3次元情報か、またはGPS衛星からの電波が受信できない場合に慣性計測部IMより取得する、自律航法による3次元情報を取得する(ステップS101)。
【0041】
取得した3次元情報に基づいてCPU20は、必要により現在位置を更新記憶した上で、地図データメモリ29に記憶される地図データを検索して(ステップS102)、該当する地点名称データが存在するか否かを判断する(ステップS103)。
【0042】
ここで該当する地点名称データが存在し、したがって対応する撮影地点設定情報または撮影環境設定情報があると判断した場合、CPU20は次いで地点設定テーブルの該当する地点名称データに対して設定されている、第1の撮影地点設定情報(撮影地点設定1)の設定種別コードに関して、現状すでに設定されている内容があればそれを一旦メインメモリ21にバックアップとして記憶させた上で、あらためてテーブルから読出した設定値を設定する(ステップS104)。
【0043】
例えば、現在位置が「Aサッカー場」であった場合、第1の撮影地点設定情報(撮影地点設定1)の設定種別コードとして「(露出)プログラム線図」、その設定値として「高速」が読出され、それを設定する。
【0044】
したがって、シャッタ速度優先の露出プログラムで可能な限り絞りF値を開放側に設定し、シャッタ速度をより高速に設定するための露出プログラム線図がプログラムメモリ22より読出されて設定される。
【0045】
次にCPU20は、地点設定テーブルの該当する地点名称データに対して設定されている、第2の撮影地点設定情報(撮影地点設定2)の設定種別コードに関して、これも現状すでに設定されている内容があればそれを一旦メインメモリ21にバックアップとして記憶させた上で、あらためてテーブルから読出した設定値を設定する(ステップS105)。
【0046】
例えば、現在位置が上述した「Aサッカー場」であった場合、第2の撮影地点設定情報(撮影地点設定2)の設定種別コードは「未使用」であり、その設定値は「0」であるため、この場合の設定処理は省略する。
【0047】
その後CPU20はさらに、地点設定テーブルの該当する地点名称データに対して設定されている、撮影環境設定情報の設定種別コードに関してテーブルから読出した設定値を設定する(ステップS106)。
【0048】
例えば、現在位置が「Aサッカー場」であった場合、撮影環境設定情報の設定種別コードとして「交流電源周波数」、その設定値として「50[Hz]」が読出され、それを設定する。
【0049】
この場合、先ほど設定した露出プログラム線図に上書きして、最低シャッタ速度を「1/50[秒]」に限定するよう露出プログラム線図を書き換える。
【0050】
図5は、このときの露出プログラム線図の内容を例示している。同図では、明るさ(LV)がF値2.8換算として、最低シャッタ速度を「1/50[秒]」に限定することで、屋内や、屋外であっても光源、または補助的な光源に蛍光管やその他、交流駆動の放電管などを使用する場合のちらつきの影響を排除するものとしている。
【0051】
図4は、上記と同様の考え方で、設定種別コード「交流電源周波数」の設定値が「60[Hz]」である場合の、露出プログラム線図の内容を例示する。例えば日本国内であれば西日本における撮影環境設定情報として、最低シャッタ速度を「1/60[秒]」に限定するよう露出プログラム線図を設定することで、交流駆動の光源を使用する場合のちらつきの影響を排除する。
【0052】
以上のようにその地点名称データに応じた第1の撮影地点設定情報(撮影地点設定1)、第2の撮影地点設定情報(撮影地点設定2)、及び撮影環境設定情報で予め定められた設定を自動的に行なった後、メインメモリ21に設ける設定フラグレジスタをセット状態を示す「1」とし(ステップS107)、以上でこの図3の一連の処理を一旦終了する。
【0053】
また上記ステップS103で該当する地点名称データが存在せず、対応する撮影地点設定情報または撮影環境設定情報がないと判断した場合、CPU20は次にその時点でメインメモリ21に設けた設定フラグレジスタがセット状態にあるか否かを判断する(ステップS108)。
【0054】
ここで設定フラグレジスタがセット状態にはないと判断した場合には、そのままこの図3の一連の処理を一旦終了する。
【0055】
また上記ステップS108で設定フラグレジスタがセット状態にあると判断した場合には、直前の同図3の処理により設定フラグがセットされており、地点名称データが存在する地点から移動してきたことになるため、CPU20は次いでそれまでバックアップとして記憶させていた第1の撮影地点設定情報(撮影地点設定1)の設定種別コードとその設定値とを読出して再設定させる(ステップS109)。
【0056】
続いてCPU20は、同様にそれまでバックアップとして記憶させていた第2の撮影地点設定情報(撮影地点設定2)の設定種別コードとその設定値とを読出して再設定させる(ステップS110)。
【0057】
その後CPU20は、メインメモリ21に設ける設定フラグレジスタのセット状態をクリアして「0」とし(ステップS111)、以上でこの図3の一連の処理を一旦終了する。
【0058】
上述したように2つの撮影地点設定情報を設定可能とし、図2でもそれらの一部を示したように彩度、(露出)プログラム線図、フォーカス設定、フォーカスエリア、ISO感度、ホワイトバランス調整、コントラスト、シャープネス、露出補正、測光方式、ダイナミックレンジ拡大、及びカラーフィルタなどの項目を最大2つ組み合わせてそれぞれ設定可能とした。
【0059】
このように、地点名称データ毎に適切と思われる設定項目を最大2つ選択して撮影条件の設定を可能としたことにより、各地点名称データ毎に全項目を個別に設定する場合に比して、地点設定テーブルに必要なデータ容量を最小限に抑えながら、その地点での撮影で有効と考えられる設定を効率的に設定することができる。
【0060】
加えて、上記地点名称データ毎に対応する撮影地点設定情報とは別に、撮影環境設定情報として、例えば図2でもそれらの一部を示したように国別に好みが異なると思われている色や、地域、国等によって異なる交流電源周波数等、より大きな環境に関連した項目を組み合わせて設定可能とした。
【0061】
このように、上記地点毎に異なる撮影条件とは別に、より大きな範囲を撮影環境設定情報として合わせて設定可能としたことで、地点設定テーブルに必要なデータ容量の無闇な拡大を防ぎながらも、よりきめ細かく撮影ミスを確実に回避できるような設定を実現できる。
【0062】
したがって、実際の撮影モードにおいては、ユーザがシーンプログラム機能等により意図して撮影条件を設定する場合を除いて、上記のように自動的に設定した撮影条件で撮影が実行される。
【0063】
以上詳述した如く本実施形態によれば、測位情報を有効に活用し、画像撮影時のユーザの負担を軽減して撮影ミスを回避することが可能となる。
【0064】
また上記実施形態では、撮影条件の設定情報として、撮影地点の施設等の属性に応じた設定情報と、撮影地点を含む周囲環境の属性に応じた設定情報とを組み合わせて設定可能としたことにより、設定すべき情報量を抑制しながら、状況に対応した適切な撮影条件の設定を実現できる。
【0065】
さらに上記実施形態では、撮影地点が屋内、あるいはそれに準じた交流電源周波数の影響を受ける光源にあると思われる環境下では、交流電源周波数の情報を含むものとしたため、光源によるちらつき(フリッカ)の影響を確実に回避できる。
【0066】
また上記実施形態では、現在位置を測定する手段として、GPS機能と慣性計測部IMによる自律航法とを組み合わせるものとしたので、GPS衛星からの電波を受けることができない室内等の環境下でも測位を継続でき、例えば室内が複数の施設に区分されているような場合でもその施設毎に最適な撮影条件を設定することができる。
【0067】
さらに上記実施形態では、地図データメモリ29で記憶する地点名称データで示される位置に至る前の撮影条件の設定情報をバックアップして記憶し、地点名称データで示される位置を外れた場合にはバックアップした撮影条件の設定情報を自動的に再設定するものとしたので、ユーザが任意に設定した撮影条件の設定情報を消去せず、ユーザに対して再設定のために手間を煩わせることがないので、地点名称データで示される位置に入る前後でのユーザにとっての利便性を低下させることがない。
【0068】
なお上記実施形態はデジタルカメラに適用した場合について説明したものであるが、本発明はこれに限らず、カメラ機能を有する携帯電話端末や電子ブック、スマートフォン等であっても同様に適用可能である。
【0069】
その他、本発明は上述した実施形態に限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で種々に変形することが可能である。また、上述した実施形態で実行される機能は可能な限り適宜組み合わせて実施しても良い。上述した実施形態には種々の段階が含まれており、開示される複数の構成要件による適宜の組み合せにより種々の発明が抽出され得る。例えば、実施形態に示される全構成要件からいくつかの構成要件が削除されても、効果が得られるのであれば、この構成要件が削除された構成が発明として抽出され得る。
【0070】
以下に、本願出願の当所の特許請求の範囲に記載された発明を付記する。
請求項1記載の発明は、現在の位置を測定して位置情報を取得する測位手段と、位置情報に対応した地図情報、及び撮影条件の設定情報を関連付けて複数記憶した地図記憶手段と、画像を撮影する撮影手段と、上記測位手段で得た位置情報に基づいて上記地図記憶手段を検索し、位置情報と関連付けて記憶された撮影条件の設定情報を取得し、取得した撮影条件の設定情報に応じて上記撮影手段での撮影条件を設定する撮影制御手段とを具備したことを特徴とする。
【0071】
請求項2記載の発明は、上記請求項1記載の発明において、上記撮影条件の設定情報は、撮影地点の施設の属性に応じた設定情報と撮影地点を含む周囲環境の属性に応じた設定情報とを組み合わせて構成することを特徴とする。
【0072】
請求項3記載の発明は、上記請求項2記載の発明において、上記撮影地点を含む周囲環境の属性に応じた設定情報は交流電源周波数の情報を含むことを特徴とする。
【0073】
請求項4記載の発明は、上記請求項1記載の発明において、上記測位手段は、複数の衛星からの到来電波を受信して現在の3次元空間中の位置を算出する第1の測位手段と、装置の移動と回転に伴う変位を検出してその累積から慣性計測手法により現在の位置を計測する第2の測位手段とを有することを特徴とする。
【0074】
請求項5記載の発明は、上記請求項1記載の発明において、上記撮影条件の設定情報をバックアップして記憶するバックアップ記憶手段をさらに具備し、上記撮影制御手段は、上記測位手段で得る位置情報が上記地図記憶手段で記憶する位置情報で示される範囲に入る前後で上記バックアップ記憶手段を用い、該範囲に入る前に使用していた撮影条件の設定情報を該範囲を出た後に継続して使用することを特徴とする。
【0075】
請求項6記載の発明は、現在の位置を測定して位置情報を取得する測位部、位置情報に対応した地図情報、及び撮影条件の設定情報を関連付けて複数記憶した地図記憶部、及び画像を撮影する撮影部を備えた装置が内蔵するコンピュータが実行するプログラムであって、上記測位部で得た位置情報に基づいて上記地図記憶部を検索し、位置情報と関連付けて記憶された撮影条件の設定情報を取得し、取得した撮影条件の設定情報に応じて上記撮影部での撮影条件を設定する撮影制御機能を実現させることを特徴とする。
【符号の説明】
【0076】
10…デジタルカメラ、11…撮影レンズ部、12…CMOSイメージセンサ、13…AGC・A/D変換部、14…画像処理部、15…表示部、16…タッチ入力部、17…マイクロホン、18…音声処理部、19…スピーカ、20…CPU、21…メインメモリ、22…プログラムメモリ、23…キー操作部、24…フラッシュ駆動部、25…イメージセンサ駆動部、26…GPSレシーバ、27…3軸加速度センサ、28…ジャイロセンサ、29…地図データメモリ、30…メモリカードコントローラ、31…フラッシュ部、32…メモリカード、33…GPSアンテナ、34…カードコネクタ、IM…慣性計測部、SB…システムバス。
【特許請求の範囲】
【請求項1】
現在の位置を測定して位置情報を取得する測位手段と、
位置情報に対応した地図情報、及び撮影条件の設定情報を関連付けて複数記憶した地図記憶手段と、
画像を撮影する撮影手段と、
上記測位手段で得た位置情報に基づいて上記地図記憶手段を検索し、位置情報と関連付けて記憶された撮影条件の設定情報を取得し、取得した撮影条件の設定情報に応じて上記撮影手段での撮影条件を設定する撮影制御手段と
を具備したことを特徴とする撮像装置。
【請求項2】
上記撮影条件の設定情報は、撮影地点の施設の属性に応じた設定情報と撮影地点を含む周囲環境の属性に応じた設定情報とを組み合わせて構成することを特徴とする請求項1記載の撮像装置。
【請求項3】
上記撮影地点を含む周囲環境の属性に応じた設定情報は交流電源周波数の情報を含むことを特徴とする請求項2記載の撮像装置。
【請求項4】
上記測位手段は、複数の衛星からの到来電波を受信して現在の3次元空間中の位置を算出する第1の測位手段と、装置の移動と回転に伴う変位を検出してその累積から慣性計測手法により現在の位置を計測する第2の測位手段とを有することを特徴とする請求項1記載の撮像装置。
【請求項5】
上記撮影条件の設定情報をバックアップして記憶するバックアップ記憶手段をさらに具備し、
上記撮影制御手段は、上記測位手段で得る位置情報が上記地図記憶手段で記憶する位置情報で示される範囲に入る前後で上記バックアップ記憶手段を用い、該範囲に入る前に使用していた撮影条件の設定情報を該範囲を出た後に継続して使用する
ことを特徴とする請求項1記載の撮像装置。
【請求項6】
現在の位置を測定して位置情報を取得する測位部、位置情報に対応した地図情報、及び撮影条件の設定情報を関連付けて複数記憶した地図記憶部、及び画像を撮影する撮影部を備えた装置が内蔵するコンピュータが実行するプログラムであって、
上記測位部で得た位置情報に基づいて上記地図記憶部を検索し、位置情報と関連付けて記憶された撮影条件の設定情報を取得し、取得した撮影条件の設定情報に応じて上記撮影部での撮影条件を設定する撮影制御機能を実現させることを特徴とするプログラム。
【請求項1】
現在の位置を測定して位置情報を取得する測位手段と、
位置情報に対応した地図情報、及び撮影条件の設定情報を関連付けて複数記憶した地図記憶手段と、
画像を撮影する撮影手段と、
上記測位手段で得た位置情報に基づいて上記地図記憶手段を検索し、位置情報と関連付けて記憶された撮影条件の設定情報を取得し、取得した撮影条件の設定情報に応じて上記撮影手段での撮影条件を設定する撮影制御手段と
を具備したことを特徴とする撮像装置。
【請求項2】
上記撮影条件の設定情報は、撮影地点の施設の属性に応じた設定情報と撮影地点を含む周囲環境の属性に応じた設定情報とを組み合わせて構成することを特徴とする請求項1記載の撮像装置。
【請求項3】
上記撮影地点を含む周囲環境の属性に応じた設定情報は交流電源周波数の情報を含むことを特徴とする請求項2記載の撮像装置。
【請求項4】
上記測位手段は、複数の衛星からの到来電波を受信して現在の3次元空間中の位置を算出する第1の測位手段と、装置の移動と回転に伴う変位を検出してその累積から慣性計測手法により現在の位置を計測する第2の測位手段とを有することを特徴とする請求項1記載の撮像装置。
【請求項5】
上記撮影条件の設定情報をバックアップして記憶するバックアップ記憶手段をさらに具備し、
上記撮影制御手段は、上記測位手段で得る位置情報が上記地図記憶手段で記憶する位置情報で示される範囲に入る前後で上記バックアップ記憶手段を用い、該範囲に入る前に使用していた撮影条件の設定情報を該範囲を出た後に継続して使用する
ことを特徴とする請求項1記載の撮像装置。
【請求項6】
現在の位置を測定して位置情報を取得する測位部、位置情報に対応した地図情報、及び撮影条件の設定情報を関連付けて複数記憶した地図記憶部、及び画像を撮影する撮影部を備えた装置が内蔵するコンピュータが実行するプログラムであって、
上記測位部で得た位置情報に基づいて上記地図記憶部を検索し、位置情報と関連付けて記憶された撮影条件の設定情報を取得し、取得した撮影条件の設定情報に応じて上記撮影部での撮影条件を設定する撮影制御機能を実現させることを特徴とするプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−199821(P2012−199821A)
【公開日】平成24年10月18日(2012.10.18)
【国際特許分類】
【出願番号】特願2011−63205(P2011−63205)
【出願日】平成23年3月22日(2011.3.22)
【出願人】(000001443)カシオ計算機株式会社 (8,748)
【Fターム(参考)】
【公開日】平成24年10月18日(2012.10.18)
【国際特許分類】
【出願日】平成23年3月22日(2011.3.22)
【出願人】(000001443)カシオ計算機株式会社 (8,748)
【Fターム(参考)】
[ Back to top ]