
撮像装置及び画像処理方法

【課題】複数枚の画像によるダイナミックレンジ拡大画像を合成するとき、画像間のずれを検知し、位置合わせ処理を高速に行える撮像装置を提供する。
【解決手段】画像情報を取得する第一の画像情報取得手段106と、第一の画像情報取得手段で取得した画像情報から画像情報の特徴量を求め、画像の特徴量による画像の特徴を現す部分領域を特定する画像特定手段105と、画像情報を取得する第二の画像情報取得手段101と、第二の画像情報取得手段により、露光時間の長さが異なる複数画像情報を入力し、前記画像特定手段で特定した画像部分領域情報を用いて、画像間のずれ量を検知する画像位置ずれ手段102と、画像位置ずれ手段で検知された画像間のずれ量による画像間ずれ補正処理する補正手段103と、
前記補正手段でずれ補正処理された画像を用いて、広いダイナミックレンジ画像を合成処理する画像合成処理手段104とを備える。
【解決手段】画像情報を取得する第一の画像情報取得手段106と、第一の画像情報取得手段で取得した画像情報から画像情報の特徴量を求め、画像の特徴量による画像の特徴を現す部分領域を特定する画像特定手段105と、画像情報を取得する第二の画像情報取得手段101と、第二の画像情報取得手段により、露光時間の長さが異なる複数画像情報を入力し、前記画像特定手段で特定した画像部分領域情報を用いて、画像間のずれ量を検知する画像位置ずれ手段102と、画像位置ずれ手段で検知された画像間のずれ量による画像間ずれ補正処理する補正手段103と、
前記補正手段でずれ補正処理された画像を用いて、広いダイナミックレンジ画像を合成処理する画像合成処理手段104とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、撮像装置、画像処理方法に関するものである。
【背景技術】
【0002】
一般に、デジタルカメラ等の撮影装置においては、CCD撮像素子などの固体撮像素子が用いられているが、固体撮像素子のダイナミックレンジは銀塩写真フィルムに比べ極めて狭いという問題点がある。そこで、従来から撮影装置のダイナミックレンジ拡大のために種々の技術が開発されている。
【0003】
例えば、特許文献1,2に開示されているように、同一被写体に対して露光量の異なる複数回の撮影、すなわち長時間露光と短時間露光の撮影を行って合成処理をし、通常の撮影画像に比べてダイナミックレンジの拡大を図るという方式がある。
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記複数回撮影によるダイナミックレンジの拡大方式では、ダイナミックレンジの拡大効果はあるが、複数回の撮影のため、撮影時に手ぶれが生じないように注意する必要がある。手ぶれが発生すると、そのまま合成した画像は2重像になってしまう。三脚などを使って撮影装置を固定すれば、ダイナミックレンジの拡大を図りつつも手ぶれを抑制して画像間のずれを防ぐことができるが、三脚を使えない場合はよくある。
【0005】
そこで、画像間のずれ量を測定し、画像間の位置合わせ後、画像合成する方法も考えられるが、得られてから画像間位置ずれの測定とずれ補正処理を撮影装置の内部で行うと、処理時間が長くなるという課題がある。
【0006】
本発明は、複数枚の画像によるダイナミックレンジ拡大画像を合成するとき、画像間のずれを検知し、位置合わせ処理を高速に行える画像処理方法と撮像装置を提供することを、その目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明にかかる撮影装置では、画像情報を取得する第一の画像情報取得手段と、第一の画像情報取得手段で取得した画像情報から画像情報の特徴量を求め、画像の特徴量による画像の特徴を現す部分領域を特定する画像特定手段と、画像情報を取得する第二の画像情報取得手段と、第二の画像情報取得手段により、露光時間の長さが異なる複数画像情報を入力し、画像特定手段で特定した画像部分領域情報を用いて画像間のずれ量を検知する画像位置ずれ手段と、画像位置ずれ手段で検知された画像間のずれ量による画像間ずれ補正処理する補正手段と、補正手段でずれ補正処理された画像を用いて広いダイナミックレンジ画像を合成処理する画像合成処理手段とを備えている。
【0008】
本発明にかかる撮影装置において、第一の画像情報取得手段で取得した画像情報の特徴量が画像のコントラストの場合、画像特定手段は、画像情報をブロックに分割し、ブロック毎にコントラストの平均値を求め、コントラスト平均値の高いブロック位置を特定する画像部分領域を特定し、補正手段は、画像特定手段で特定した部分領域情報を用いて、画像間のずれ量を検知、補正する。
【0009】
本発明にかかる撮影装置において、第一の画像情報取得手段で取得した画像情報の特徴量が画像に映った人物の顔領域の場合、画像特定手段は、顔領域を画像の特徴を現す部分領域とし、補正手段は、画像特定手段で特定した部分領域情報を用いて、画像間のずれ量を検知、補正する。
【0010】
本発明に係る画像処理方法は、画像情報を取得する第一の画像情報取得ステップと、第一の画像情報取得ステップで取得した画像情報から画像情報の特徴量を求め、画像の特徴量による画像の特徴を現す部分領域を特定する画像特定ステップと、画像情報を取得す第二の画像情報取得ステップと、第二の画像情報取得ステップにより露光時間の長さが異なる複数画像情報を入力し、画像特定ステップで特定した画像部分領域情報を用いて、画像間のずれ量を検知する画像位置ずれステップと、画像位置ずれステップで検知された画像間のずれ量による画像間ずれ補正処理する補正ステップと、補正ステップでずれ補正処理された画像を用いて、広いダイナミックレンジ画像を合成処理する画像合成処理ステップを備えている。
【0011】
本発明に係る画像処理方法において、第一の画像情報取得ステップで取得した画像情報の特徴量が画像のコントラストの場合、画像特定ステップでは、画像情報をブロックに分割し、ブロック毎にコントラストの平均値を求め、コントラスト平均値の高いブロック位置を特定する画像部分領域を特定し、補正ステップでは、画像特定ステップで特定した部分領域情報を用いて、画像間のずれ量を検知、補正する。
【0012】
本発明に係る画像処理方法において、第一の画像情報取得ステップで取得した画像情報の特徴量が画像に映った人物の顔領域の場合、画像特定ステップでは、顔領域を画像の特徴を現す部分領域とし、補正ステップでは、画像特定ステップで特定した部分領域情報を用いて、画像間のずれ量を検知、補正する。
【0013】
本発明にかかる画像形成プログラムでは、コンピュータに、上記の何れかに記載の画像処理方法を実行させることを特徴とし、本発明にかかる、コンピュータによって読み取り可能な画像処理プログラムを記録する記憶媒体として、上記画像処理プログラムが記録されていることを特徴としている。
【0014】
本発明にかかる画像処理方法では、第一の画像情報取得手段で画像の特徴を検出するための画像を入力し、入力した画像の縮小処理を行う。次に縮小した画像から画像の特徴を抽出する。特徴量は画像のコントラスト、もしくは人物の顔とする。例えば、画像をブロックに分割し、各ブロック内でコントラスト値の平均値を求め、ブロックの座標と各ブロックのコントラストの平均値を出力する。別の例としては、画像内に人物の顔領域を抽出し、顔領域の座標を出力する。
【0015】
本発明では、第二の画像情報取得手段による異なる露光時間の複数枚の画像を入力する。ここでは露光時間の長い画像と露光時間の短い画像を入力する。縮小した画像から画像の特徴を抽出した画像の特徴量を用いて、画像間ずれ量を測定する。ここでは、分割された画像のブロックごとのコントラスト平均値を高い順で並べ、コントラストの高い少数ブロックを選択する。選択されたブロックの座標付近における、第二の画像情報取得手段で入力した画像のずれ検知を行う。選択されたブロックは画像の全画面の一部しか占めない。この部分はコントラストの高いブロックなので、それらのブロックを利用することで、効果的なずれ計測ができる。また、全画像に対してずれ検知しなくてもよいので、処理時間の短縮ができる。
【0016】
顔検知モード付撮影装置、つまり顔領域を検知し、顔領域に合わせて焦点、明るさ、色の調整の可能な撮影装置では、コントラストの高いブロック検出の代わりに、画像から人間の顔領域を検知し、顔領域付近で、第二の画像情報取得手段で入力した画像のずれ量計測を行う。顔領域は画像の全領域の一部にしかないので、顔領域付近でずれ量測定の処理時間は全画面でのずれ検知より大幅に処理時間短縮できる。顔領域は注目領域なので、顔領域に合わせて、位置ずれ補正を行うと、全画面の位置ずれ補正誤差があっても、顔領域に確実に精度良く位置ずれ補正ができる。また検知された画像間のずれ量を用いて、画像間のずれ補正を行い、広いダイナミックレンジ画像を合成する。
【発明の効果】
【0017】
本発明によれば、画像情報を取得する第一の画像情報取得手段で画像の特徴を検出するための画像を入力し、この画像から画像特定手段で特徴量を検出して、画面上にもっとも特徴のある領域を抽出するので、特徴領域が画像全体の一部しか占めなくなり、この領域でのずれ検知が効果的に行える。このため、複数枚の画像によるダイナミックレンジ拡大画像を合成するとき、画像間の位置合わせ処理を高速に行え、処理時間の短縮を図ることができる。
【0018】
本発明によれば、画像情報を取得する第二の画像情報取得手段で、露光時間の長い画像と露光時間の短い画像の複数画像情報を入力し、第一の画像情報取得手段で抽出された特徴領域の付近で、画像間のずれ量を求めてずれ補正を行う。このため、画像間のずれを補正することで、ダイナミックレンジ拡大画像を合成するとき、2重像を解消することができる。また、顔検知を設定するとき、画像から検知された顔領域を特徴領域とすると、顔領域は画面全体の一部しかないので、顔領域付近でずれ検知処理すれば、複数枚の画像によるダイナミックレンジ拡大画像を合成するとき、画像間の位置合わせ処理を高速に行え、処理時間の短縮を図ることができる。
【0019】
このため、効果的、高速な画像のずれ検知、ずれ補正を行えるので、広いダイナミックレンジ拡大画像を合成するとき、合成画像の2重像を解消でき、複数枚の画像によるダイナミックレンジ拡大画像を合成するとき、画像間のずれを検知し、位置合わせ処理を高速に行える画像処理方法と撮像装置を提供することができる。
【図面の簡単な説明】
【0020】
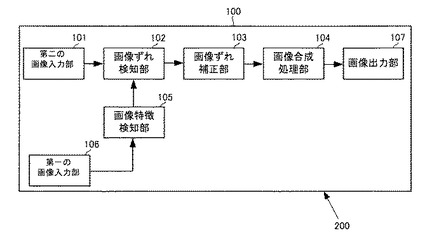
【図1】本発明の第一の実施形態にかかる撮影装置に含まれる画像処理部の構成を示すブロック図である。
【図2】画像特徴検知部の一構成例を示すブロック図である。
【図3】画像特徴検知部において画像のコントラスト情報を特徴量として抽出する際の、画像を分割した状態と、その処理内容を説明するためのブロック図である。
【図4】画像特徴検知部におけるエッジ抽出フィルタによるエッジ抽出の例を説明するための図である。
【図5】エッジフィルタ処理後のエッジ画像を示す図である。
【図6】(a)は選択されたコントラストの高いブロック位置を第二の画像入力部で入力した1つの画像に示した図、(b)は第二の画像入力部で入力した別な画像にコントラストの高いブロック位置を示した図である。
【図7】画像合成処理部で画像合成に用いる重み関数を示す図である。
【図8】第一の実施形態が適用された撮影装置の構成を示すブロック図である。
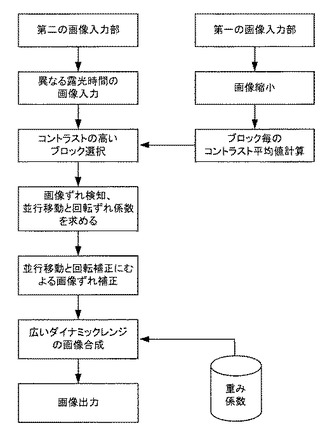
【図9】図8に示す撮影装置の内部で実行される画像ずれ検知、ずれ補正及び画像合成に係る処理内容を示すフローチャートである。
【図10】本発明の第二の実施形態にかかる撮影装置に含まれる画像処理部の構成を示すブロック図である。
【図11】(a)は選択された顔領域の位置を第二の画像入力部で入力した1つの画像に示した図、(b)は第二の画像入力部で入力した別な画像に顔領域の位置を示した図である。
【図12】第二の実施形態が適用された撮影装置の構成を示すブロック図である。
【図13】図12に示す撮影装置の内部で実行される顔領域認識、画像ずれ補正及び画像合成に係る処理内容を示すフローチャートである。
【発明を実施するための形態】
【0021】
以下、本発明にかかる撮像装置、画像処理方法および画像処理プログラムを実施するための形態について、図面を参照して詳細に説明する。各図中、同一又は相当する部分には同一の符号を付し、その重複説明は簡略化ないし省略する。
【0022】
また、以下に説明する各撮像装置には、予め本発明にかかる画像処理プログラムがインストールされて記憶されている。画像処理プログラムはコンピュータで読み取り可能なもので、周知の図示しないCDやDVDなどの光学的な記憶媒体となるメディアに記憶されていて、各撮像装置の記憶手段にインストールされることで起動して、本発明に係る画像処理方法が実行されるように構成されている。
(第一の実施の形態)
本発明が適用される撮影装置となるデジタルカメラ200が備えている画像処理部100の構成例について説明する。図1は、本実施の形態にかかる画像処理部100の構成を示すブロック図である。
【0023】
図1において、画像処理部100は、第二の画像情報取得手段となる第二の画像入力部101、画像位置ずれ手段となる画像ずれ検知部102、補正手段となる画像ずれ補正部103、画像合成処理手段となる画像合成理部104、画像特定手段となる画像特徴検知部105、第一の画像情報取得手段となる第一の画像入力部106及び画像出力部107を備えている。
【0024】
第二の画像入力部101はデジタルカメラ200による画像を入力するもので、広いダイナミックレンジ画像を合成するための露光時間異なる複数の画像情報を入力するためのものである。ここでは、露光時間の長い画像と短い画像のそれぞれの情報を入力する。
【0025】
第一の画像入力部106は、第二の画像入力部101と同じ撮影対象を撮影して、その画像を入力するためのものである。画像特徴検知部105の構成と処理の詳細について図2を用いて説明する。画像特徴検知部105は、第一の画像入力部106から入力された画像を縮小画像生成部201により画像を縮小し、縮小画像に対して、その特徴量を特徴情報として画像特徴情報抽出部202を用いて抽出する。本形態において、画像特徴情報抽出部202は、画像のコントラスト情報、つまりエッジ情報を特徴量として抽出する。抽出方法としては、縮小画像に対して、エッジ抽出フィルタによるエッジ抽出フィルタ処理を行う。本形態では、エッジ抽出の例として、表1のエッジ抽出フィルタとなる周知のラプラシアンフィルタを使用する。
【0026】
【表1】

【0027】
本形態では、エッジ抽出フィルタ処理で用いるエッジ抽出フィルタで抽出したエッジ情報(画像情報)に対して図3に示すようにブロック分割を行い、各ブロック内で、エッジ抽出フィルタ処理後のエッジ情報をブロック内で平均化する処理を行なう。本形態では、エッジ抽出フィルタの例としてラプラシアンフィルタの例を説明したが、他のエッジ抽出フィルタを使っても良い。
【0028】
次にエッジ抽出フィルタによるエッジ抽出の例を説明する。
【0029】
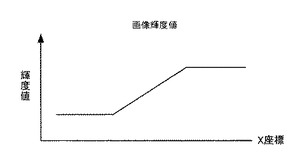
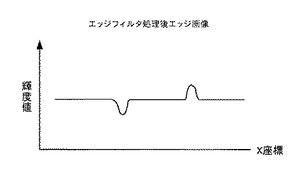
図4は横軸にx座標、縦軸に輝度値をとった図である。図4に示すような特性の画像に対して、エッジ抽出すると、図5に示すようなエッジが得られる。つまり、図4において輝度値が屈曲して変化する部分をエッジとして捉える。このエッジの平均値を図3に示す。図3において、色の濃いブロックはコントラストの高いブロックを示す。
【0030】
図1に示す画像ずれ検知部102は、第二の画像入力部101により入力された複数枚画像に対して、画像間のずれ量を検知する。ここではまず画像特徴検知部105から入力した図3に示す画像特徴検知結果を入力する。その結果からコントラスト平均値の高いブロック(色の濃いブロック)を選択する。選択されたコントラストの高いブロック位置は、第二の画像入力部101で入力した図6(a)に示す画像1での位置を黒いブロックA,B,C,Dで示す。第二の画像入力部101により入力されたもう一枚の画像2の画面上の対応するブロックの位置を、図6(b)の画像2に黒いブロックA’,B’,C’,D’で示す。
【0031】
次にコントラストの高い黒いブロック付近で、画像間のずれ量検知を行う。図6(a)の画像1のコントラストの高い黒いブロックA,B,C,Dをスタート位置とすると、以下のずれ検知法で図6(b)の画像2のブロックA’,B’,C’,D’のずれ量を検知する。
【0032】
このずれ量の検知方法を数1に示す。図6(a)の画像1のコントラストの高い黒いブロックサイズをM×Nとする。領域内の画像1の画素値f(i,j)と画像2の画素値g(i,j)を用いて下記数1の値を計算する。ここで、(i,j)は画像1上での画素の座標値である。g(i,j)は画像2上での画素の座標値である。E(u,v)は最小となるときの位置(u,v)を求めている。この値は、画像1と画像2の間の対応するブロックのずれ量となる。
【0033】
【数1】
【0034】
求めた各黒いブロックのずれ量から、画像2と画像1との間の全体のずれ量を計算する。各ブロックのずれ量から画像の平均移動と回転量を求めて、画像間全体のずれ量を求める。
【0035】
画像ずれ補正部103は、画像1と画像2の画像間ずれを補正するものである。ここでは、画像ずれ検知部102で検知した画像間のずれ量を用い、画像2を全体的にずれ量分で補正する。つまり画像ずれ検知部102で検知した画像の平行移動と回転量を用いて、画像1と画像2の間のずれに対して補正が行われる。補正方法として、画像2を測定された画像の平行移動量と回転量を用いて、画像2のずれを補正する。
【0036】
画像合成処理部104は、画像ずれの補正後に、ダイナミックレンジ拡大画像合成処理を行うものである。ここで、長い露光時間で撮影した画像と、短い露光時間で撮影した画像の合成例を説明する。図7は画像合成の重み関数を示し、横軸は画像の輝度値であり、縦軸は画像合成の重み係数である。
【0037】
露光時間の異なる画像を合成するとき、まず下記数2で露光時間の短い画像の正規化を行う。ここで、I'Sは正規化した短い露光画像の画素値であり、ISは正規化前の画素値である。Kは正規化係数であり、長い露光時間と短い露光時間の比である。
【0038】
【数2】
【0039】
次に正規化した画像を、図7に示す重み関数を用いて画像を合成する。図7に示すように画素の輝度値はM2より大きい場合、露光時間の短い画像の画素値を選択する。輝度知M1より小さい場合、露光時間の長い画像の画素値を選択する。輝度値はM1とM2の間であれば、2枚の画像の加重平均で画素値を求める。加重平均の重み係数は、図7に示すM1とM2の間の斜線部分の重み係数を使う。輝度知M1とM2は実験で予め決めている。このようにして、ダイナミックレンジ拡大用の複数の画像を画像合成処理部104で合成する。
図1に示す画像出力部107は処理した画像やそれ以外の画像を出力するものである。
【0040】
次に、上述した画像処理を実施するデジタルカメラ200のハードウェア構成について説明する。
図8は、本実施の形態にかかるデジタルカメラ200のハードウェア構成を示すブロック図である。図8に示すように、デジタルカメラ200は、撮影光学系1、メカシャッタ2、CCD(Charge Coupled Device)3、CDS(Correlated Double Sampling:相関2重サンプリング)回路4、A/D変換器5、駆動源となるモータ6、タイミング信号を発生するタイミング信号発生器7、信号処理回路8、CPU(Central Processing Unit)9、RAM(Random Access Memory)10、ROM(Read Only Memory)11、SDRAM(SynchronousDRAM)12、画像圧縮伸張回路13、メモリカード14、操作部15、液晶ディスプレイ16(以下、「LCD16」と記す)を備えている。
【0041】
そして、被写体光Lが撮影光学系1を通してCCD3に入射される。撮影光学系1とCCD3との間には、メカシャッタ2が配置されており、このメカシャッタ2によりCCD3への入射光を遮断することができる。なお、撮影光学系1及びメカシャッタ2は、モータ6でそれぞれ駆動される。
【0042】
CCD3は、撮像面に結像された光学像を電気信号に変換して、アナログの画像データとして出力するものである。CCD3から出力された画像情報は、CDS回路4によりノイズ成分を除去され、A/D変換器5によりデジタル値に変換された後、画像処理回路8に対して出力される。
【0043】
信号処理回路8は、画像データを一時格納するSDRAM12を用いて、YCrCb変換処理、ホワイトバランス制御処理、コントラスト補正処理、エッジ強調処理、色変換処理などの各種画像処理を行う機能を備えている。なお、ホワイトバランス処理は、画像情報の色濃さを調整し、コントラスト補正処理は、画像情報のコントラストを調整する画像処理である。エッジ強調処理は、画像情報のシャープネスを調整し、色変換処理は、画像情報の色合いを調整する周知の画像処理である。画像処理回路8は、信号処理や画像処理が施された画像情報を液晶ディスプレイ16(以下、「LCD16」と略記する)に表示する。また、信号処理、画像処理が施された画像情報は、画像圧縮伸張回路13を介して、メモリカード14に記録される。画像圧縮伸張回路13は、操作部15から取得した指示によって、画像処理回路8から出力される画像情報を圧縮してメモリカード14に出力すると共に、メモリカード14から読み出した画像情報を伸張して信号処理回路8に出力する回路である。
【0044】
CCD3、CDS回路4及びA/D変換器5は、タイミング信号発生器7を介してCPU9によってタイミングが制御されている。さらに、画像処理回路8、画像圧縮伸張回路13、メモリカード14も、CPU9によって制御されている。
【0045】
デジタルカメラ200では、CPU9はプログラムに従って各種演算処理を行い、各種プログラムなどを記憶手段となる読み出し専用メモリであるROM11に格納し、読み出し書き込み自在のメモリであるRAM10が有する各種の処理過程で利用するワークエリア、各種データ格納エリアなどに各種データを展開する。これら画像処理回路8から操作部15までは、バスラインによって相互に通信可能に接続されている。本形態では、画像処理プログラムがROM11に製品出荷前から記憶されている。無論、プログラムのバージョンアップを図る場合には、製品出荷後に最新の画像処理プログラムがROM11にインストールされることになる。
【0046】
このような構成のデジタルカメラ200による処理ステップを図9に示すフローチャートに沿って説明する。
【0047】
まずデジタルカメラ200では、画像の特徴情報を取得するための画像情報を第一の画像入力部101で入力し、画像処理回路8を通して縮小した画像情報をSDRAM12のメモリ領域に一時的に保存する。このメモリ領域上の縮小画像データを再度、画像処理回路8により画像のブロックごとのコントラスト平均値を算出して求め、求めたブロック毎のコントラスト平均値をSDRAM12の画像メモリ領域に保存する。これにより、ブロックの番号とブロック毎のコントラスト平均値が保存される。
【0048】
次に本撮影を行う。ここでは、画像露光量の異なる2枚の画像を撮影し、第二の画像入力部101から入力された撮影画像をSDRAM12に一時保存する。
【0049】
デジタルカメラ200では、ROM11に予め記憶された画像処理プログラムの1つである画像ずれ検知プログラムを起動してずれ検知処理を行う。この画像ずれ検知プログラムは、SDRAM12に保存したブロック番号とブロックごとのコントラスト平均値からコントラスト値のもっとも高い複数のブロックを選択する。選択されたブロックの位置で、SDRAM12に保存した本撮影の複数枚の画像情報からずれ量検知を行う。すなわち画像のずれ量を求めて、ブロックのずれ量から画像の平均移動係数と回転係数を求める。
【0050】
次に、求めたずれ量から求めた画像間の平行移動係数と回転係数およびROM11に保存してある画像合成重み係数パラメータ(図7参照)を呼び出し、SDRAM12に保存してある異なる露光時間の画像情報とともに、画像処理回路8に転送し、画像処理回路8の内部で、画像の平行移動、回転処理による画像間のずれ補正を行い、合成重み係数による広いダイナミックレンジ画像合成処理を行う。各種処理を行われた画像はLCD16に表示されることで画像出力されることとなる。
(第2の実施の形態)
本実施の形態に係る撮影装置となるデジタルカメラ201は、人間の顔を検知して、画像を入力してダイナミックレンジ拡大画像合成する場合、画像間の位置ずれを高速に検知し、画像ずれを補正するものである。
【0051】
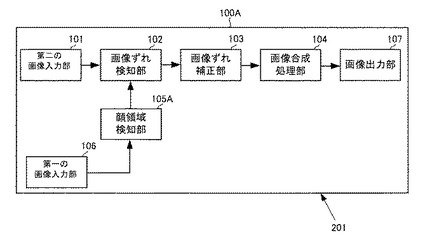
第2の実施形態にかかるデジタルカメラ201が備えている画像処理部100Aの構成例について図10を用いて説明する。図10は、本形態に係る画像処理部100Aの構成を示すブロック図である。画像処理部100Aは、第二の画像入力部101、画像ずれ検知部102、画像ずれ補正部103、画像合成理部104、第一の画像入力部106、画像出力部107とともに、ここでは、画像特徴検知部として顔領域検知部105Aを備えている。
【0052】
第二の画像入力部101はデジタルカメラ201による画像を入力するもので、広いダイナミックレンジ画像を合成するための露光時間の異なる複数の画像情報を入力するものである。ここでは、露光時間の長い画像と露光時間の短い画像のそれぞれの情報を入力する。
【0053】
第一の画像入力部106は、第二の画像入力部101と同じ撮影対象を撮影し、画像を入力するものである。画像顔領域検知部105Aは入力した画像を縮小し、縮小画像に対して、人間の顔領域を検知し、検知した顔領域の座標を出力する機能を備えている。なお、人間の顔を検知する構成については既に公知であるので、ここではその説明を省略する。
【0054】
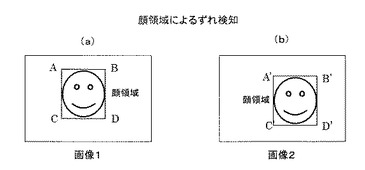
画像ずれ検知部102は第二の画像入力部101により入力した複数枚の画像情報に対して、画像間のずれ量を検知する。ここでは、まず顔領域検知部105Aから入力した顔領域検知結果を入力する。その結果を用いて、図11(a)の画像1に示す顔領域と第二の画像入力部101が入力したもう一枚の画像2の画面上の対応する顔領域の位置を図11(b)に示す画像2に示す。
【0055】
次に画像1の検知された顔領域付近で、画像ずれ検知を行う。図11(a)の画像1の顔領域をスタート位置として、以下のずれ検知法で図11(b)画像2のずれ量を検知する。
【0056】
ずれ量の検知方法には上記の数1を用いる。ここで画像1の顔領域サイズはM×Nとする。領域内の画像1の画素値f(i,j)とずれ対象となる画像2の画素値g(i,j)を用いて数1の値を計算する。ここで、(i,j)は画像1上での画素の座標値である。E(u,v)は最小となるときの位置(u,v)を求める。この値は画像1と画像2の間のずれ量となる。
【0057】
求めた各顔領域のずれ量から、画像2と画像1間の全体のずれ量を計算する。画像が複数ある場合、各顔領域のずれ量を平均すれば、画像間全体のずれを求められる。
【0058】
画像のずれ量を求めた後、画像のずれ補正、画像合成処理は、第1の実施形態と同一の処理内容となる。
【0059】
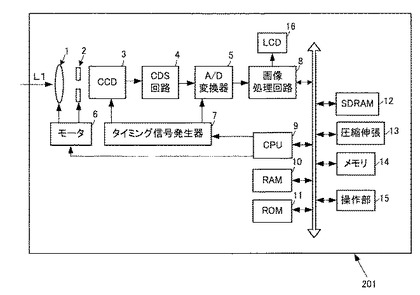
次に、上述した画像処理を実施するデジタルカメラ201のハードウェア構成について説明する。図12は、本実施の形態にかかるデジタルカメラ201のハードウェア構成を示すブロック図である。図12に示すように、デジタルカメラ201は、撮影光学系1、メカシャッタ2、CCD3、CDS回路4、A/D変換器5、駆動源となるモータ6、タイミング信号を発生するタイミング信号発生器7、信号処理回路8、CPU9、RAM10、ROM11、SDRAM12、画像圧縮伸張回路13、メモリカード14、操作部15、LCD16を備えている。
【0060】
そして、被写体光L1が、まず撮影光学系1を通してCCD3に入射される。また、撮影光学系1とCCD3との間には、メカシャッタ2が配置されており、このメカシャッタ2によりCCD3への入射光を遮断することができる。なお、撮影光学系1及びメカシャッタ2は、モータ6より駆動される。
【0061】
CCD3は、撮像面に結像された光学像をアナログの画像データとして出力する。CCD3から出力された画像情報は、CDS回路4によりノイズ成分を除去され、A/D変換器5によりデジタル値に変換された後、画像処理回路8に対して出力される。
【0062】
画像処理回路8は、画像情報を一時格納するSDRAM12を用いて、YCrCb変換処理、ホワイトバランス制御処理、コントラスト補正処理、エッジ強調処理、色変換処理などの各種画像処理を行う。なお、ホワイトバランス処理は、画像情報の色濃さを調整し、コントラスト補正処理は、画像情報のコントラストを調整する画像処理である。エッジ強調処理は、画像情報のシャープネスを調整し、色変換処理は、画像情報の色合いを調整する画像処理である。画像処理回路8は、信号処理や画像処理が施された画像情報をLCD16に表示する。また、信号処理、画像処理が施された画像情報は、画像圧縮伸張回路13を介して、メモリカード14に記録される。画像圧縮伸張回路13は、操作部15から取得した指示によって、画像処理回路8から出力される画像情報を圧縮してメモリカード14に出力すると共に、メモリカード14から読み出した画像情報を伸張して信号処理回路8に出力する回路である。
CCD3、CDS回路4及びA/D変換器5は、タイミング信号発生器7を介してCPU9によってタイミングが制御されている。さらに、画像処理回路8、画像圧縮伸張回路13、メモリカード14も、CPU9によって制御されている。
【0063】
デジタルカメラ201では、CPU9はプログラムに従って各種演算処理を行い、各種プログラムなどを記憶手段となる読み出し専用メモリであるROM11に格納し、読み出し書き込み自在のメモリであるRAM10が有する各種の処理過程で利用するワークエリア、各種データ格納エリアなどに各種データを展開する。これら画像処理回路8から操作部15までは、バスラインによって相互に通信可能に接続されている。本形態では、画像処理プログラムがROM11に製品出荷前から記憶されている。無論、プログラムのバージョンアップを図る場合には、製品出荷後に最新の画像処理プログラムがROM11にインストールされることになる。
【0064】
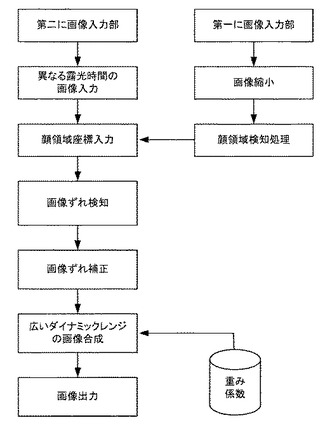
このような構成のデジタルカメラ201による処理ステップを図13に示すフローチャートに沿って説明する。
【0065】
デジタルカメラ201では、第一の画像入力部101により顔領域検知するための画像データが入力されると、画像処理入力回路8を通して、縮小した画像データをメモリ領域SDRAM12に一時的に保存する。次にROM11に予め記憶されている画像処理プログラムを構成する顔検知プログラム11を起動し、顔検知処理を行う。顔検知結果、つまり検知された顔領域を示す図11(a)の座標値A,B,C,DをSDRAM12に保存する。
【0066】
次に第二の画像入力部101による本撮影を行い、露光量の異なる2枚の画像を撮影し、撮影した画像データをSDRAM12に一時保存する。次にROM11に予め記憶されている画像処理プログラムを構成する画像ずれ検知プログラムを起動し、ずれ検知処理を行う。ずれ検知プログラムでは、SDRAM12に保存した顔領域の座標値A,B,C,Dを入力する。そして顔領域の位置データを用いて、SDRAM12に保存した画像からずれ量検知を行う。
【0067】
次に求めたずれ量およびROM11に保存してある画像合成重み係数パラメータ(図7参照)を呼び出し、SDRAM12にある異なる露光時間の画像、求めた画像のずれ量、重み係数とともに、画像処理回路8に転送し、画像処理回路8の内部で、画像ずれ補正と画像合成処理を行う。各種処理を行われた画像はLCD16に表示されることで画像出力されることとなる。
【0068】
このように、上記各形態では、画像情報を取得する第一の画像入力部106で画像の特徴を検出するための画像を入力し、この画像から画像特徴検知部105で特徴量を検出して、画面上にもっとも特徴のある領域を抽出するので、特徴領域が画像全体の一部しか占めなくなり、この領域でのずれ検知が効果的に行える。このため、複数枚の画像によるダイナミックレンジ拡大画像を合成するとき、画像間の位置合わせ処理を高速に行え、処理時間の短縮を図ることができる。
【0069】
また、画像情報を取得する第二の画像入力部101で、露光時間の長い画像と露光時間の短い画像の複数の画像情報を入力し、第一の画像入力部106で抽出された特徴領域の付近で、画像ずれ検知部102と画像ずれ補正部103により画像間のずれ量を求めてずれ補正を行う。このため、画像間のずれを補正することで、画像合成処理部104でダイナミックレンジ拡大画像を合成するとき、2重像を解消することができる。
【0070】
このため、効果的、高速な画像のずれ検知、ずれ補正を行えるので、広いダイナミックレンジ拡大画像を合成するとき、合成画像の2重像を解消でき、複数枚の画像によるダイナミックレンジ拡大画像を合成するとき、画像間のずれを検知し、位置合わせ処理を高速に行える画像処理方法と撮像装置を提供することができる。
【0071】
また、第二の実施形態のように、顔検知を設定するとき、画像から検知された顔領域を特徴領域とすると、顔領域は画面全体の一部しか存在しないので、顔領域付近でずれ検知処理すれば、複数枚の画像によるダイナミックレンジ拡大画像を合成するとき、画像間の位置合わせ処理を高速に行え、処理時間の短縮を図ることができる。
【符号の説明】
【0072】
101 第二の画像情報取得手段
102 画像位置ずれ手段
103 補正手段
104 画像合成処理手段
105 画像特定手段
106 第一の画像情報取得手段
200,201 撮影装置
300 記憶媒体
【先行技術文献】
【特許文献】
【0073】
【特許文献1】特開2000−92378号公報
【特許文献2】特許第3974799号公報
【技術分野】
【0001】
本発明は、撮像装置、画像処理方法に関するものである。
【背景技術】
【0002】
一般に、デジタルカメラ等の撮影装置においては、CCD撮像素子などの固体撮像素子が用いられているが、固体撮像素子のダイナミックレンジは銀塩写真フィルムに比べ極めて狭いという問題点がある。そこで、従来から撮影装置のダイナミックレンジ拡大のために種々の技術が開発されている。
【0003】
例えば、特許文献1,2に開示されているように、同一被写体に対して露光量の異なる複数回の撮影、すなわち長時間露光と短時間露光の撮影を行って合成処理をし、通常の撮影画像に比べてダイナミックレンジの拡大を図るという方式がある。
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記複数回撮影によるダイナミックレンジの拡大方式では、ダイナミックレンジの拡大効果はあるが、複数回の撮影のため、撮影時に手ぶれが生じないように注意する必要がある。手ぶれが発生すると、そのまま合成した画像は2重像になってしまう。三脚などを使って撮影装置を固定すれば、ダイナミックレンジの拡大を図りつつも手ぶれを抑制して画像間のずれを防ぐことができるが、三脚を使えない場合はよくある。
【0005】
そこで、画像間のずれ量を測定し、画像間の位置合わせ後、画像合成する方法も考えられるが、得られてから画像間位置ずれの測定とずれ補正処理を撮影装置の内部で行うと、処理時間が長くなるという課題がある。
【0006】
本発明は、複数枚の画像によるダイナミックレンジ拡大画像を合成するとき、画像間のずれを検知し、位置合わせ処理を高速に行える画像処理方法と撮像装置を提供することを、その目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明にかかる撮影装置では、画像情報を取得する第一の画像情報取得手段と、第一の画像情報取得手段で取得した画像情報から画像情報の特徴量を求め、画像の特徴量による画像の特徴を現す部分領域を特定する画像特定手段と、画像情報を取得する第二の画像情報取得手段と、第二の画像情報取得手段により、露光時間の長さが異なる複数画像情報を入力し、画像特定手段で特定した画像部分領域情報を用いて画像間のずれ量を検知する画像位置ずれ手段と、画像位置ずれ手段で検知された画像間のずれ量による画像間ずれ補正処理する補正手段と、補正手段でずれ補正処理された画像を用いて広いダイナミックレンジ画像を合成処理する画像合成処理手段とを備えている。
【0008】
本発明にかかる撮影装置において、第一の画像情報取得手段で取得した画像情報の特徴量が画像のコントラストの場合、画像特定手段は、画像情報をブロックに分割し、ブロック毎にコントラストの平均値を求め、コントラスト平均値の高いブロック位置を特定する画像部分領域を特定し、補正手段は、画像特定手段で特定した部分領域情報を用いて、画像間のずれ量を検知、補正する。
【0009】
本発明にかかる撮影装置において、第一の画像情報取得手段で取得した画像情報の特徴量が画像に映った人物の顔領域の場合、画像特定手段は、顔領域を画像の特徴を現す部分領域とし、補正手段は、画像特定手段で特定した部分領域情報を用いて、画像間のずれ量を検知、補正する。
【0010】
本発明に係る画像処理方法は、画像情報を取得する第一の画像情報取得ステップと、第一の画像情報取得ステップで取得した画像情報から画像情報の特徴量を求め、画像の特徴量による画像の特徴を現す部分領域を特定する画像特定ステップと、画像情報を取得す第二の画像情報取得ステップと、第二の画像情報取得ステップにより露光時間の長さが異なる複数画像情報を入力し、画像特定ステップで特定した画像部分領域情報を用いて、画像間のずれ量を検知する画像位置ずれステップと、画像位置ずれステップで検知された画像間のずれ量による画像間ずれ補正処理する補正ステップと、補正ステップでずれ補正処理された画像を用いて、広いダイナミックレンジ画像を合成処理する画像合成処理ステップを備えている。
【0011】
本発明に係る画像処理方法において、第一の画像情報取得ステップで取得した画像情報の特徴量が画像のコントラストの場合、画像特定ステップでは、画像情報をブロックに分割し、ブロック毎にコントラストの平均値を求め、コントラスト平均値の高いブロック位置を特定する画像部分領域を特定し、補正ステップでは、画像特定ステップで特定した部分領域情報を用いて、画像間のずれ量を検知、補正する。
【0012】
本発明に係る画像処理方法において、第一の画像情報取得ステップで取得した画像情報の特徴量が画像に映った人物の顔領域の場合、画像特定ステップでは、顔領域を画像の特徴を現す部分領域とし、補正ステップでは、画像特定ステップで特定した部分領域情報を用いて、画像間のずれ量を検知、補正する。
【0013】
本発明にかかる画像形成プログラムでは、コンピュータに、上記の何れかに記載の画像処理方法を実行させることを特徴とし、本発明にかかる、コンピュータによって読み取り可能な画像処理プログラムを記録する記憶媒体として、上記画像処理プログラムが記録されていることを特徴としている。
【0014】
本発明にかかる画像処理方法では、第一の画像情報取得手段で画像の特徴を検出するための画像を入力し、入力した画像の縮小処理を行う。次に縮小した画像から画像の特徴を抽出する。特徴量は画像のコントラスト、もしくは人物の顔とする。例えば、画像をブロックに分割し、各ブロック内でコントラスト値の平均値を求め、ブロックの座標と各ブロックのコントラストの平均値を出力する。別の例としては、画像内に人物の顔領域を抽出し、顔領域の座標を出力する。
【0015】
本発明では、第二の画像情報取得手段による異なる露光時間の複数枚の画像を入力する。ここでは露光時間の長い画像と露光時間の短い画像を入力する。縮小した画像から画像の特徴を抽出した画像の特徴量を用いて、画像間ずれ量を測定する。ここでは、分割された画像のブロックごとのコントラスト平均値を高い順で並べ、コントラストの高い少数ブロックを選択する。選択されたブロックの座標付近における、第二の画像情報取得手段で入力した画像のずれ検知を行う。選択されたブロックは画像の全画面の一部しか占めない。この部分はコントラストの高いブロックなので、それらのブロックを利用することで、効果的なずれ計測ができる。また、全画像に対してずれ検知しなくてもよいので、処理時間の短縮ができる。
【0016】
顔検知モード付撮影装置、つまり顔領域を検知し、顔領域に合わせて焦点、明るさ、色の調整の可能な撮影装置では、コントラストの高いブロック検出の代わりに、画像から人間の顔領域を検知し、顔領域付近で、第二の画像情報取得手段で入力した画像のずれ量計測を行う。顔領域は画像の全領域の一部にしかないので、顔領域付近でずれ量測定の処理時間は全画面でのずれ検知より大幅に処理時間短縮できる。顔領域は注目領域なので、顔領域に合わせて、位置ずれ補正を行うと、全画面の位置ずれ補正誤差があっても、顔領域に確実に精度良く位置ずれ補正ができる。また検知された画像間のずれ量を用いて、画像間のずれ補正を行い、広いダイナミックレンジ画像を合成する。
【発明の効果】
【0017】
本発明によれば、画像情報を取得する第一の画像情報取得手段で画像の特徴を検出するための画像を入力し、この画像から画像特定手段で特徴量を検出して、画面上にもっとも特徴のある領域を抽出するので、特徴領域が画像全体の一部しか占めなくなり、この領域でのずれ検知が効果的に行える。このため、複数枚の画像によるダイナミックレンジ拡大画像を合成するとき、画像間の位置合わせ処理を高速に行え、処理時間の短縮を図ることができる。
【0018】
本発明によれば、画像情報を取得する第二の画像情報取得手段で、露光時間の長い画像と露光時間の短い画像の複数画像情報を入力し、第一の画像情報取得手段で抽出された特徴領域の付近で、画像間のずれ量を求めてずれ補正を行う。このため、画像間のずれを補正することで、ダイナミックレンジ拡大画像を合成するとき、2重像を解消することができる。また、顔検知を設定するとき、画像から検知された顔領域を特徴領域とすると、顔領域は画面全体の一部しかないので、顔領域付近でずれ検知処理すれば、複数枚の画像によるダイナミックレンジ拡大画像を合成するとき、画像間の位置合わせ処理を高速に行え、処理時間の短縮を図ることができる。
【0019】
このため、効果的、高速な画像のずれ検知、ずれ補正を行えるので、広いダイナミックレンジ拡大画像を合成するとき、合成画像の2重像を解消でき、複数枚の画像によるダイナミックレンジ拡大画像を合成するとき、画像間のずれを検知し、位置合わせ処理を高速に行える画像処理方法と撮像装置を提供することができる。
【図面の簡単な説明】
【0020】
【図1】本発明の第一の実施形態にかかる撮影装置に含まれる画像処理部の構成を示すブロック図である。
【図2】画像特徴検知部の一構成例を示すブロック図である。
【図3】画像特徴検知部において画像のコントラスト情報を特徴量として抽出する際の、画像を分割した状態と、その処理内容を説明するためのブロック図である。
【図4】画像特徴検知部におけるエッジ抽出フィルタによるエッジ抽出の例を説明するための図である。
【図5】エッジフィルタ処理後のエッジ画像を示す図である。
【図6】(a)は選択されたコントラストの高いブロック位置を第二の画像入力部で入力した1つの画像に示した図、(b)は第二の画像入力部で入力した別な画像にコントラストの高いブロック位置を示した図である。
【図7】画像合成処理部で画像合成に用いる重み関数を示す図である。
【図8】第一の実施形態が適用された撮影装置の構成を示すブロック図である。
【図9】図8に示す撮影装置の内部で実行される画像ずれ検知、ずれ補正及び画像合成に係る処理内容を示すフローチャートである。
【図10】本発明の第二の実施形態にかかる撮影装置に含まれる画像処理部の構成を示すブロック図である。
【図11】(a)は選択された顔領域の位置を第二の画像入力部で入力した1つの画像に示した図、(b)は第二の画像入力部で入力した別な画像に顔領域の位置を示した図である。
【図12】第二の実施形態が適用された撮影装置の構成を示すブロック図である。
【図13】図12に示す撮影装置の内部で実行される顔領域認識、画像ずれ補正及び画像合成に係る処理内容を示すフローチャートである。
【発明を実施するための形態】
【0021】
以下、本発明にかかる撮像装置、画像処理方法および画像処理プログラムを実施するための形態について、図面を参照して詳細に説明する。各図中、同一又は相当する部分には同一の符号を付し、その重複説明は簡略化ないし省略する。
【0022】
また、以下に説明する各撮像装置には、予め本発明にかかる画像処理プログラムがインストールされて記憶されている。画像処理プログラムはコンピュータで読み取り可能なもので、周知の図示しないCDやDVDなどの光学的な記憶媒体となるメディアに記憶されていて、各撮像装置の記憶手段にインストールされることで起動して、本発明に係る画像処理方法が実行されるように構成されている。
(第一の実施の形態)
本発明が適用される撮影装置となるデジタルカメラ200が備えている画像処理部100の構成例について説明する。図1は、本実施の形態にかかる画像処理部100の構成を示すブロック図である。
【0023】
図1において、画像処理部100は、第二の画像情報取得手段となる第二の画像入力部101、画像位置ずれ手段となる画像ずれ検知部102、補正手段となる画像ずれ補正部103、画像合成処理手段となる画像合成理部104、画像特定手段となる画像特徴検知部105、第一の画像情報取得手段となる第一の画像入力部106及び画像出力部107を備えている。
【0024】
第二の画像入力部101はデジタルカメラ200による画像を入力するもので、広いダイナミックレンジ画像を合成するための露光時間異なる複数の画像情報を入力するためのものである。ここでは、露光時間の長い画像と短い画像のそれぞれの情報を入力する。
【0025】
第一の画像入力部106は、第二の画像入力部101と同じ撮影対象を撮影して、その画像を入力するためのものである。画像特徴検知部105の構成と処理の詳細について図2を用いて説明する。画像特徴検知部105は、第一の画像入力部106から入力された画像を縮小画像生成部201により画像を縮小し、縮小画像に対して、その特徴量を特徴情報として画像特徴情報抽出部202を用いて抽出する。本形態において、画像特徴情報抽出部202は、画像のコントラスト情報、つまりエッジ情報を特徴量として抽出する。抽出方法としては、縮小画像に対して、エッジ抽出フィルタによるエッジ抽出フィルタ処理を行う。本形態では、エッジ抽出の例として、表1のエッジ抽出フィルタとなる周知のラプラシアンフィルタを使用する。
【0026】
【表1】
【0027】
本形態では、エッジ抽出フィルタ処理で用いるエッジ抽出フィルタで抽出したエッジ情報(画像情報)に対して図3に示すようにブロック分割を行い、各ブロック内で、エッジ抽出フィルタ処理後のエッジ情報をブロック内で平均化する処理を行なう。本形態では、エッジ抽出フィルタの例としてラプラシアンフィルタの例を説明したが、他のエッジ抽出フィルタを使っても良い。
【0028】
次にエッジ抽出フィルタによるエッジ抽出の例を説明する。
【0029】
図4は横軸にx座標、縦軸に輝度値をとった図である。図4に示すような特性の画像に対して、エッジ抽出すると、図5に示すようなエッジが得られる。つまり、図4において輝度値が屈曲して変化する部分をエッジとして捉える。このエッジの平均値を図3に示す。図3において、色の濃いブロックはコントラストの高いブロックを示す。
【0030】
図1に示す画像ずれ検知部102は、第二の画像入力部101により入力された複数枚画像に対して、画像間のずれ量を検知する。ここではまず画像特徴検知部105から入力した図3に示す画像特徴検知結果を入力する。その結果からコントラスト平均値の高いブロック(色の濃いブロック)を選択する。選択されたコントラストの高いブロック位置は、第二の画像入力部101で入力した図6(a)に示す画像1での位置を黒いブロックA,B,C,Dで示す。第二の画像入力部101により入力されたもう一枚の画像2の画面上の対応するブロックの位置を、図6(b)の画像2に黒いブロックA’,B’,C’,D’で示す。
【0031】
次にコントラストの高い黒いブロック付近で、画像間のずれ量検知を行う。図6(a)の画像1のコントラストの高い黒いブロックA,B,C,Dをスタート位置とすると、以下のずれ検知法で図6(b)の画像2のブロックA’,B’,C’,D’のずれ量を検知する。
【0032】
このずれ量の検知方法を数1に示す。図6(a)の画像1のコントラストの高い黒いブロックサイズをM×Nとする。領域内の画像1の画素値f(i,j)と画像2の画素値g(i,j)を用いて下記数1の値を計算する。ここで、(i,j)は画像1上での画素の座標値である。g(i,j)は画像2上での画素の座標値である。E(u,v)は最小となるときの位置(u,v)を求めている。この値は、画像1と画像2の間の対応するブロックのずれ量となる。
【0033】
【数1】
【0034】
求めた各黒いブロックのずれ量から、画像2と画像1との間の全体のずれ量を計算する。各ブロックのずれ量から画像の平均移動と回転量を求めて、画像間全体のずれ量を求める。
【0035】
画像ずれ補正部103は、画像1と画像2の画像間ずれを補正するものである。ここでは、画像ずれ検知部102で検知した画像間のずれ量を用い、画像2を全体的にずれ量分で補正する。つまり画像ずれ検知部102で検知した画像の平行移動と回転量を用いて、画像1と画像2の間のずれに対して補正が行われる。補正方法として、画像2を測定された画像の平行移動量と回転量を用いて、画像2のずれを補正する。
【0036】
画像合成処理部104は、画像ずれの補正後に、ダイナミックレンジ拡大画像合成処理を行うものである。ここで、長い露光時間で撮影した画像と、短い露光時間で撮影した画像の合成例を説明する。図7は画像合成の重み関数を示し、横軸は画像の輝度値であり、縦軸は画像合成の重み係数である。
【0037】
露光時間の異なる画像を合成するとき、まず下記数2で露光時間の短い画像の正規化を行う。ここで、I'Sは正規化した短い露光画像の画素値であり、ISは正規化前の画素値である。Kは正規化係数であり、長い露光時間と短い露光時間の比である。
【0038】
【数2】
【0039】
次に正規化した画像を、図7に示す重み関数を用いて画像を合成する。図7に示すように画素の輝度値はM2より大きい場合、露光時間の短い画像の画素値を選択する。輝度知M1より小さい場合、露光時間の長い画像の画素値を選択する。輝度値はM1とM2の間であれば、2枚の画像の加重平均で画素値を求める。加重平均の重み係数は、図7に示すM1とM2の間の斜線部分の重み係数を使う。輝度知M1とM2は実験で予め決めている。このようにして、ダイナミックレンジ拡大用の複数の画像を画像合成処理部104で合成する。
図1に示す画像出力部107は処理した画像やそれ以外の画像を出力するものである。
【0040】
次に、上述した画像処理を実施するデジタルカメラ200のハードウェア構成について説明する。
図8は、本実施の形態にかかるデジタルカメラ200のハードウェア構成を示すブロック図である。図8に示すように、デジタルカメラ200は、撮影光学系1、メカシャッタ2、CCD(Charge Coupled Device)3、CDS(Correlated Double Sampling:相関2重サンプリング)回路4、A/D変換器5、駆動源となるモータ6、タイミング信号を発生するタイミング信号発生器7、信号処理回路8、CPU(Central Processing Unit)9、RAM(Random Access Memory)10、ROM(Read Only Memory)11、SDRAM(SynchronousDRAM)12、画像圧縮伸張回路13、メモリカード14、操作部15、液晶ディスプレイ16(以下、「LCD16」と記す)を備えている。
【0041】
そして、被写体光Lが撮影光学系1を通してCCD3に入射される。撮影光学系1とCCD3との間には、メカシャッタ2が配置されており、このメカシャッタ2によりCCD3への入射光を遮断することができる。なお、撮影光学系1及びメカシャッタ2は、モータ6でそれぞれ駆動される。
【0042】
CCD3は、撮像面に結像された光学像を電気信号に変換して、アナログの画像データとして出力するものである。CCD3から出力された画像情報は、CDS回路4によりノイズ成分を除去され、A/D変換器5によりデジタル値に変換された後、画像処理回路8に対して出力される。
【0043】
信号処理回路8は、画像データを一時格納するSDRAM12を用いて、YCrCb変換処理、ホワイトバランス制御処理、コントラスト補正処理、エッジ強調処理、色変換処理などの各種画像処理を行う機能を備えている。なお、ホワイトバランス処理は、画像情報の色濃さを調整し、コントラスト補正処理は、画像情報のコントラストを調整する画像処理である。エッジ強調処理は、画像情報のシャープネスを調整し、色変換処理は、画像情報の色合いを調整する周知の画像処理である。画像処理回路8は、信号処理や画像処理が施された画像情報を液晶ディスプレイ16(以下、「LCD16」と略記する)に表示する。また、信号処理、画像処理が施された画像情報は、画像圧縮伸張回路13を介して、メモリカード14に記録される。画像圧縮伸張回路13は、操作部15から取得した指示によって、画像処理回路8から出力される画像情報を圧縮してメモリカード14に出力すると共に、メモリカード14から読み出した画像情報を伸張して信号処理回路8に出力する回路である。
【0044】
CCD3、CDS回路4及びA/D変換器5は、タイミング信号発生器7を介してCPU9によってタイミングが制御されている。さらに、画像処理回路8、画像圧縮伸張回路13、メモリカード14も、CPU9によって制御されている。
【0045】
デジタルカメラ200では、CPU9はプログラムに従って各種演算処理を行い、各種プログラムなどを記憶手段となる読み出し専用メモリであるROM11に格納し、読み出し書き込み自在のメモリであるRAM10が有する各種の処理過程で利用するワークエリア、各種データ格納エリアなどに各種データを展開する。これら画像処理回路8から操作部15までは、バスラインによって相互に通信可能に接続されている。本形態では、画像処理プログラムがROM11に製品出荷前から記憶されている。無論、プログラムのバージョンアップを図る場合には、製品出荷後に最新の画像処理プログラムがROM11にインストールされることになる。
【0046】
このような構成のデジタルカメラ200による処理ステップを図9に示すフローチャートに沿って説明する。
【0047】
まずデジタルカメラ200では、画像の特徴情報を取得するための画像情報を第一の画像入力部101で入力し、画像処理回路8を通して縮小した画像情報をSDRAM12のメモリ領域に一時的に保存する。このメモリ領域上の縮小画像データを再度、画像処理回路8により画像のブロックごとのコントラスト平均値を算出して求め、求めたブロック毎のコントラスト平均値をSDRAM12の画像メモリ領域に保存する。これにより、ブロックの番号とブロック毎のコントラスト平均値が保存される。
【0048】
次に本撮影を行う。ここでは、画像露光量の異なる2枚の画像を撮影し、第二の画像入力部101から入力された撮影画像をSDRAM12に一時保存する。
【0049】
デジタルカメラ200では、ROM11に予め記憶された画像処理プログラムの1つである画像ずれ検知プログラムを起動してずれ検知処理を行う。この画像ずれ検知プログラムは、SDRAM12に保存したブロック番号とブロックごとのコントラスト平均値からコントラスト値のもっとも高い複数のブロックを選択する。選択されたブロックの位置で、SDRAM12に保存した本撮影の複数枚の画像情報からずれ量検知を行う。すなわち画像のずれ量を求めて、ブロックのずれ量から画像の平均移動係数と回転係数を求める。
【0050】
次に、求めたずれ量から求めた画像間の平行移動係数と回転係数およびROM11に保存してある画像合成重み係数パラメータ(図7参照)を呼び出し、SDRAM12に保存してある異なる露光時間の画像情報とともに、画像処理回路8に転送し、画像処理回路8の内部で、画像の平行移動、回転処理による画像間のずれ補正を行い、合成重み係数による広いダイナミックレンジ画像合成処理を行う。各種処理を行われた画像はLCD16に表示されることで画像出力されることとなる。
(第2の実施の形態)
本実施の形態に係る撮影装置となるデジタルカメラ201は、人間の顔を検知して、画像を入力してダイナミックレンジ拡大画像合成する場合、画像間の位置ずれを高速に検知し、画像ずれを補正するものである。
【0051】
第2の実施形態にかかるデジタルカメラ201が備えている画像処理部100Aの構成例について図10を用いて説明する。図10は、本形態に係る画像処理部100Aの構成を示すブロック図である。画像処理部100Aは、第二の画像入力部101、画像ずれ検知部102、画像ずれ補正部103、画像合成理部104、第一の画像入力部106、画像出力部107とともに、ここでは、画像特徴検知部として顔領域検知部105Aを備えている。
【0052】
第二の画像入力部101はデジタルカメラ201による画像を入力するもので、広いダイナミックレンジ画像を合成するための露光時間の異なる複数の画像情報を入力するものである。ここでは、露光時間の長い画像と露光時間の短い画像のそれぞれの情報を入力する。
【0053】
第一の画像入力部106は、第二の画像入力部101と同じ撮影対象を撮影し、画像を入力するものである。画像顔領域検知部105Aは入力した画像を縮小し、縮小画像に対して、人間の顔領域を検知し、検知した顔領域の座標を出力する機能を備えている。なお、人間の顔を検知する構成については既に公知であるので、ここではその説明を省略する。
【0054】
画像ずれ検知部102は第二の画像入力部101により入力した複数枚の画像情報に対して、画像間のずれ量を検知する。ここでは、まず顔領域検知部105Aから入力した顔領域検知結果を入力する。その結果を用いて、図11(a)の画像1に示す顔領域と第二の画像入力部101が入力したもう一枚の画像2の画面上の対応する顔領域の位置を図11(b)に示す画像2に示す。
【0055】
次に画像1の検知された顔領域付近で、画像ずれ検知を行う。図11(a)の画像1の顔領域をスタート位置として、以下のずれ検知法で図11(b)画像2のずれ量を検知する。
【0056】
ずれ量の検知方法には上記の数1を用いる。ここで画像1の顔領域サイズはM×Nとする。領域内の画像1の画素値f(i,j)とずれ対象となる画像2の画素値g(i,j)を用いて数1の値を計算する。ここで、(i,j)は画像1上での画素の座標値である。E(u,v)は最小となるときの位置(u,v)を求める。この値は画像1と画像2の間のずれ量となる。
【0057】
求めた各顔領域のずれ量から、画像2と画像1間の全体のずれ量を計算する。画像が複数ある場合、各顔領域のずれ量を平均すれば、画像間全体のずれを求められる。
【0058】
画像のずれ量を求めた後、画像のずれ補正、画像合成処理は、第1の実施形態と同一の処理内容となる。
【0059】
次に、上述した画像処理を実施するデジタルカメラ201のハードウェア構成について説明する。図12は、本実施の形態にかかるデジタルカメラ201のハードウェア構成を示すブロック図である。図12に示すように、デジタルカメラ201は、撮影光学系1、メカシャッタ2、CCD3、CDS回路4、A/D変換器5、駆動源となるモータ6、タイミング信号を発生するタイミング信号発生器7、信号処理回路8、CPU9、RAM10、ROM11、SDRAM12、画像圧縮伸張回路13、メモリカード14、操作部15、LCD16を備えている。
【0060】
そして、被写体光L1が、まず撮影光学系1を通してCCD3に入射される。また、撮影光学系1とCCD3との間には、メカシャッタ2が配置されており、このメカシャッタ2によりCCD3への入射光を遮断することができる。なお、撮影光学系1及びメカシャッタ2は、モータ6より駆動される。
【0061】
CCD3は、撮像面に結像された光学像をアナログの画像データとして出力する。CCD3から出力された画像情報は、CDS回路4によりノイズ成分を除去され、A/D変換器5によりデジタル値に変換された後、画像処理回路8に対して出力される。
【0062】
画像処理回路8は、画像情報を一時格納するSDRAM12を用いて、YCrCb変換処理、ホワイトバランス制御処理、コントラスト補正処理、エッジ強調処理、色変換処理などの各種画像処理を行う。なお、ホワイトバランス処理は、画像情報の色濃さを調整し、コントラスト補正処理は、画像情報のコントラストを調整する画像処理である。エッジ強調処理は、画像情報のシャープネスを調整し、色変換処理は、画像情報の色合いを調整する画像処理である。画像処理回路8は、信号処理や画像処理が施された画像情報をLCD16に表示する。また、信号処理、画像処理が施された画像情報は、画像圧縮伸張回路13を介して、メモリカード14に記録される。画像圧縮伸張回路13は、操作部15から取得した指示によって、画像処理回路8から出力される画像情報を圧縮してメモリカード14に出力すると共に、メモリカード14から読み出した画像情報を伸張して信号処理回路8に出力する回路である。
CCD3、CDS回路4及びA/D変換器5は、タイミング信号発生器7を介してCPU9によってタイミングが制御されている。さらに、画像処理回路8、画像圧縮伸張回路13、メモリカード14も、CPU9によって制御されている。
【0063】
デジタルカメラ201では、CPU9はプログラムに従って各種演算処理を行い、各種プログラムなどを記憶手段となる読み出し専用メモリであるROM11に格納し、読み出し書き込み自在のメモリであるRAM10が有する各種の処理過程で利用するワークエリア、各種データ格納エリアなどに各種データを展開する。これら画像処理回路8から操作部15までは、バスラインによって相互に通信可能に接続されている。本形態では、画像処理プログラムがROM11に製品出荷前から記憶されている。無論、プログラムのバージョンアップを図る場合には、製品出荷後に最新の画像処理プログラムがROM11にインストールされることになる。
【0064】
このような構成のデジタルカメラ201による処理ステップを図13に示すフローチャートに沿って説明する。
【0065】
デジタルカメラ201では、第一の画像入力部101により顔領域検知するための画像データが入力されると、画像処理入力回路8を通して、縮小した画像データをメモリ領域SDRAM12に一時的に保存する。次にROM11に予め記憶されている画像処理プログラムを構成する顔検知プログラム11を起動し、顔検知処理を行う。顔検知結果、つまり検知された顔領域を示す図11(a)の座標値A,B,C,DをSDRAM12に保存する。
【0066】
次に第二の画像入力部101による本撮影を行い、露光量の異なる2枚の画像を撮影し、撮影した画像データをSDRAM12に一時保存する。次にROM11に予め記憶されている画像処理プログラムを構成する画像ずれ検知プログラムを起動し、ずれ検知処理を行う。ずれ検知プログラムでは、SDRAM12に保存した顔領域の座標値A,B,C,Dを入力する。そして顔領域の位置データを用いて、SDRAM12に保存した画像からずれ量検知を行う。
【0067】
次に求めたずれ量およびROM11に保存してある画像合成重み係数パラメータ(図7参照)を呼び出し、SDRAM12にある異なる露光時間の画像、求めた画像のずれ量、重み係数とともに、画像処理回路8に転送し、画像処理回路8の内部で、画像ずれ補正と画像合成処理を行う。各種処理を行われた画像はLCD16に表示されることで画像出力されることとなる。
【0068】
このように、上記各形態では、画像情報を取得する第一の画像入力部106で画像の特徴を検出するための画像を入力し、この画像から画像特徴検知部105で特徴量を検出して、画面上にもっとも特徴のある領域を抽出するので、特徴領域が画像全体の一部しか占めなくなり、この領域でのずれ検知が効果的に行える。このため、複数枚の画像によるダイナミックレンジ拡大画像を合成するとき、画像間の位置合わせ処理を高速に行え、処理時間の短縮を図ることができる。
【0069】
また、画像情報を取得する第二の画像入力部101で、露光時間の長い画像と露光時間の短い画像の複数の画像情報を入力し、第一の画像入力部106で抽出された特徴領域の付近で、画像ずれ検知部102と画像ずれ補正部103により画像間のずれ量を求めてずれ補正を行う。このため、画像間のずれを補正することで、画像合成処理部104でダイナミックレンジ拡大画像を合成するとき、2重像を解消することができる。
【0070】
このため、効果的、高速な画像のずれ検知、ずれ補正を行えるので、広いダイナミックレンジ拡大画像を合成するとき、合成画像の2重像を解消でき、複数枚の画像によるダイナミックレンジ拡大画像を合成するとき、画像間のずれを検知し、位置合わせ処理を高速に行える画像処理方法と撮像装置を提供することができる。
【0071】
また、第二の実施形態のように、顔検知を設定するとき、画像から検知された顔領域を特徴領域とすると、顔領域は画面全体の一部しか存在しないので、顔領域付近でずれ検知処理すれば、複数枚の画像によるダイナミックレンジ拡大画像を合成するとき、画像間の位置合わせ処理を高速に行え、処理時間の短縮を図ることができる。
【符号の説明】
【0072】
101 第二の画像情報取得手段
102 画像位置ずれ手段
103 補正手段
104 画像合成処理手段
105 画像特定手段
106 第一の画像情報取得手段
200,201 撮影装置
300 記憶媒体
【先行技術文献】
【特許文献】
【0073】
【特許文献1】特開2000−92378号公報
【特許文献2】特許第3974799号公報
【特許請求の範囲】
【請求項1】
画像情報を取得する第一の画像情報取得手段と、
第一の画像情報取得手段で取得した画像情報から画像情報の特徴量を求め、画像の特徴量による画像の特徴を現す部分領域を特定する画像特定手段と、
画像情報を取得する第二の画像情報取得手段と、
前記第二の画像情報取得手段により、露光時間の長さが異なる複数画像情報を入力し、前記画像特定手段で特定した画像部分領域情報を用いて、画像間のずれ量を検知する画像位置ずれ手段と、
前記画像位置ずれ手段で検知された画像間のずれ量による画像間ずれ補正処理する補正手段と、
前記補正手段でずれ補正処理された画像を用いて、広いダイナミックレンジ画像を合成処理する画像合成処理手段とを備えることを特徴とする撮影装置。
【請求項2】
前記第一の画像情報取得手段で取得した画像情報の特徴量は、画像のコントラストであり、
前記画像特定手段は、前記画像情報をブロックに分割し、ブロック毎にコントラストの平均値を求め、コントラスト平均値の高いブロック位置を特定する画像部分領域を特定し、
前記補正手段は、前記画像特定手段で特定した部分領域情報を用いて、画像間のずれ量を検知、補正することを特徴とする請求項1に記載の撮影装置。
【請求項3】
前記第一の画像情報取得手段で取得した画像情報の特徴量は、画像に映った人物の顔領域であり、
前記画像特定手段は、前記顔領域を画像の特徴を現す部分領域とし、
前記補正手段は、前記画像特定手段で特定した部分領域情報を用いて、画像間のずれ量を検知、補正することを特徴とする請求項1に記載の撮影装置。
【請求項4】
画像情報を取得する第一の画像情報取得ステップと、
第一の画像情報取得ステップで取得した画像情報から画像情報の特徴量を求め、画像の特徴量による画像の特徴を現す部分領域を特定する画像特定ステップと、
画像情報を取得す第二の画像情報取得ステップと、
前記第二の画像情報取得ステップにより露光時間の長さが異なる複数画像情報を入力し、前記画像特定ステップで特定した画像部分領域情報を用いて、画像間のずれ量を検知する画像位置ずれステップと、
前記画像位置ずれステップで検知された画像間のずれ量による画像間ずれ補正処理する補正ステップと、
前記補正ステップでずれ補正処理された画像を用いて、広いダイナミックレンジ画像を合成処理する画像合成処理ステップを備えることを特徴とする画像処理方法。
【請求項5】
前記第一の画像情報取得ステップで取得した画像情報の特徴量は、画像のコントラストであり、
前記画像特定ステップは、前記画像情報をブロックに分割し、ブロック毎にコントラストの平均値を求め、コントラスト平均値の高いブロック位置を特定する画像部分領域を特定し、
前記補正ステップは、前記画像特定ステップで特定した部分領域情報を用いて、画像間のずれ量を検知、補正することを特徴とする請求項4に記載の画像処理方法。
【請求項6】
前記第一の画像情報取得ステップで取得した画像情報の特徴量は、画像に映った人物の顔領域であり、
前記画像特定ステップは、前記顔領域を画像の特徴を現す部分領域とし、
前記補正ステップは、前記画像特定ステップで特定した部分領域情報を用いて、画像間のずれ量を検知、補正することを特徴とする請求項4に記載の画像処理方法。
【請求項7】
コンピュータに、請求項4ないし6の何れかに記載の画像処理方法を実行させることを特徴とする画像形成プログラム。
【請求項8】
コンピュータによって読み取り可能な画像処理プログラムを記録する記憶媒体であって、
前記画像処理プログラムとして請求項7記載の画像処理プログラムが記録されていることを特徴とする記憶媒体。
【請求項1】
画像情報を取得する第一の画像情報取得手段と、
第一の画像情報取得手段で取得した画像情報から画像情報の特徴量を求め、画像の特徴量による画像の特徴を現す部分領域を特定する画像特定手段と、
画像情報を取得する第二の画像情報取得手段と、
前記第二の画像情報取得手段により、露光時間の長さが異なる複数画像情報を入力し、前記画像特定手段で特定した画像部分領域情報を用いて、画像間のずれ量を検知する画像位置ずれ手段と、
前記画像位置ずれ手段で検知された画像間のずれ量による画像間ずれ補正処理する補正手段と、
前記補正手段でずれ補正処理された画像を用いて、広いダイナミックレンジ画像を合成処理する画像合成処理手段とを備えることを特徴とする撮影装置。
【請求項2】
前記第一の画像情報取得手段で取得した画像情報の特徴量は、画像のコントラストであり、
前記画像特定手段は、前記画像情報をブロックに分割し、ブロック毎にコントラストの平均値を求め、コントラスト平均値の高いブロック位置を特定する画像部分領域を特定し、
前記補正手段は、前記画像特定手段で特定した部分領域情報を用いて、画像間のずれ量を検知、補正することを特徴とする請求項1に記載の撮影装置。
【請求項3】
前記第一の画像情報取得手段で取得した画像情報の特徴量は、画像に映った人物の顔領域であり、
前記画像特定手段は、前記顔領域を画像の特徴を現す部分領域とし、
前記補正手段は、前記画像特定手段で特定した部分領域情報を用いて、画像間のずれ量を検知、補正することを特徴とする請求項1に記載の撮影装置。
【請求項4】
画像情報を取得する第一の画像情報取得ステップと、
第一の画像情報取得ステップで取得した画像情報から画像情報の特徴量を求め、画像の特徴量による画像の特徴を現す部分領域を特定する画像特定ステップと、
画像情報を取得す第二の画像情報取得ステップと、
前記第二の画像情報取得ステップにより露光時間の長さが異なる複数画像情報を入力し、前記画像特定ステップで特定した画像部分領域情報を用いて、画像間のずれ量を検知する画像位置ずれステップと、
前記画像位置ずれステップで検知された画像間のずれ量による画像間ずれ補正処理する補正ステップと、
前記補正ステップでずれ補正処理された画像を用いて、広いダイナミックレンジ画像を合成処理する画像合成処理ステップを備えることを特徴とする画像処理方法。
【請求項5】
前記第一の画像情報取得ステップで取得した画像情報の特徴量は、画像のコントラストであり、
前記画像特定ステップは、前記画像情報をブロックに分割し、ブロック毎にコントラストの平均値を求め、コントラスト平均値の高いブロック位置を特定する画像部分領域を特定し、
前記補正ステップは、前記画像特定ステップで特定した部分領域情報を用いて、画像間のずれ量を検知、補正することを特徴とする請求項4に記載の画像処理方法。
【請求項6】
前記第一の画像情報取得ステップで取得した画像情報の特徴量は、画像に映った人物の顔領域であり、
前記画像特定ステップは、前記顔領域を画像の特徴を現す部分領域とし、
前記補正ステップは、前記画像特定ステップで特定した部分領域情報を用いて、画像間のずれ量を検知、補正することを特徴とする請求項4に記載の画像処理方法。
【請求項7】
コンピュータに、請求項4ないし6の何れかに記載の画像処理方法を実行させることを特徴とする画像形成プログラム。
【請求項8】
コンピュータによって読み取り可能な画像処理プログラムを記録する記憶媒体であって、
前記画像処理プログラムとして請求項7記載の画像処理プログラムが記録されていることを特徴とする記憶媒体。
【図1】

【図2】

【図3】

【図4】
【図5】
【図6】

【図7】

【図8】

【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2010−258885(P2010−258885A)
【公開日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願番号】特願2009−108059(P2009−108059)
【出願日】平成21年4月27日(2009.4.27)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
【公開日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願日】平成21年4月27日(2009.4.27)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
[ Back to top ]