
撮像装置及び駆動雑音除去装置
【課題】
撮像光学系の駆動に伴う駆動雑音を精度良く除去する。
【解決手段】
カメラ制御部(119)はレンズ制御部(107)に撮影レンズ(102)の光学要素を駆動する駆動命令を送る。レンズ制御部(107)は、駆動部(106a,106b,106c)により撮像光学系(104)の光学要素を駆動する。マイク(115)は周囲の音声を取り込む。マイク(115)の出力音声信号には、レンズ駆動の駆動雑音が混入する。カメラ制御部(119)は、駆動命令から一定の期間内で、マイク(115)の出力音声から光学要素の駆動に特徴的な周波数成分を抽出し、一定レベル以上になる区間を検出し、雑音除去処理区間とする。カメラ制御部(119)は、雑音除去処理区間の音声を除去し、雑音除去処理区間の前後の音声から予測して補間する。
撮像光学系の駆動に伴う駆動雑音を精度良く除去する。
【解決手段】
カメラ制御部(119)はレンズ制御部(107)に撮影レンズ(102)の光学要素を駆動する駆動命令を送る。レンズ制御部(107)は、駆動部(106a,106b,106c)により撮像光学系(104)の光学要素を駆動する。マイク(115)は周囲の音声を取り込む。マイク(115)の出力音声信号には、レンズ駆動の駆動雑音が混入する。カメラ制御部(119)は、駆動命令から一定の期間内で、マイク(115)の出力音声から光学要素の駆動に特徴的な周波数成分を抽出し、一定レベル以上になる区間を検出し、雑音除去処理区間とする。カメラ制御部(119)は、雑音除去処理区間の音声を除去し、雑音除去処理区間の前後の音声から予測して補間する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、撮像装置及び駆動雑音除去装置に関し、より具体的には、デジタルコンパクトカメラ及びデジタル一眼レフカメラ等の、録音装置を有する撮像装置、及び音声信号から駆動雑音を除去する駆動雑音除去装置に関する。
【背景技術】
【0002】
静止画撮影のほかに音声信号記録を伴う動画撮影を行う機能を有するデジタルカメラが商品化されている。動画撮影時には、撮影状態の変更によりフォーカスレンズの駆動や輝度変化による絞り機構の駆動など、撮像装置駆動部が動作し、これが、音声信号記録に対する雑音となってしまう。そこで、このような駆動雑音を低減する技術が、提案されている。
【0003】
特許文献1には、雑音を除去する手法の一つのスペクトルサブトラクション法を有する撮像装置が記載されている。ズームレンズを駆動させるためのズームキー操作に対し、ズームレンズ駆動モータの駆動に同期して、マイクにより取り込まれる音声信号への雑音除去処理を有効化する。
【0004】
特許文献2には、駆動雑音を発生させる駆動モータの近傍に参照用マイクを設け、参照用マイクに入力される駆動音が一定レベルを超えたとき雑音除去処理を実行する技術が記載されている。参照マイクの信号を基に雑音を検知しているので、駆動モータへの駆動信号タイミングと実際に駆動モータが駆動して駆動雑音を発生したタイミングでのタイムラグを極力減らすことができる。
【0005】
特許文献3には、携帯電話などの音声信号を符号化して伝送する通信装置におおいて、突発的な雑音を精度良く検知する技術が記載されている。具体的には、通信時に取得する音声信号を、一定時間長のフレームに分割すると共にフレームごとの信号を周波数帯域に変換し、周波数帯域ごとの信号レベルの変化を監視して突発的な雑音を検知する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−279185号公報
【特許文献2】特開2006−287387号公報
【特許文献3】特開2001−344000号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
音声信号に混入した雑音を除去する雑音除去技術では、雑音除去処理の区間を正確に求めることが必要である。特許文献1に記載の技術では、ズームキー操作タイミングに応じて雑音処理区間を決定するので、そのタイミング信号が不正確な場合には精度よい雑音処理ができない。特許文献2に開示される技術では、音声信号を入力する主マイクと共に、別の雑音取得用の参照マイクを具備しなければならず、部品点数が増えてしまう。また、参照マイクに常に電力を供給しておかなければならず、デジタルカメラにおいては電力消費の面で不利である。特許文献3に記載される技術では、音声信号入力中に常時、周波数領域への変換を行う演算を行わなければならない。周波数領域への変換演算として一般に知られているフーリエ変換は、演算量の上で負荷が非常に高い。
【0008】
本発明は、このような不都合を解消し、適切に雑音を除去できる撮像装置及び駆動雑音除去装置を提示することを目的とする。
【課題を解決するための手段】
【0009】
本発明に係る撮像装置は、被写体像を結像する撮像光学系と、前記撮像光学系から導かれる被写体像を撮像する撮像素子と、前記撮像光学系の光学要素を変化させる光学系駆動手段と、前記光学系駆動手段を駆動命令により制御する制御手段と、音声信号を取得する音声入力手段と、前記駆動命令からの所定の解析区間にある雑音除去区間であって、前記音声入力手段の出力に含まれる、前記光学系駆動手段の駆動雑音の特徴周波数の成分から雑音除去区間を決定する決定手段と、前記音声入力手段の出力から前記雑音除去区間の雑音を除去する音声信号処理手段と、前記音声信号処理手段の出力信号を記録する記録手段とを具備することを特徴とする。
【0010】
本発明に係る駆動雑音除去装置は、駆動手段による駆動で発生する駆動雑音が混入する音声信号から前記駆動雑音を低減する駆動雑音除去装置であって、前記音声信号、及び、前記音声信号に同期する、前記駆動手段の駆動タイミングを示す駆動タイミング信号を取り込む手段と、前記駆動タイミング信号からの所定の解析区間にある雑音除去区間であって、前記音声信号に含まれる前記駆動雑音の特徴周波数の成分から雑音除去区間を決定する決定手段と、前記音声信号から前記雑音除去区間の前記駆動雑音を除去する音声信号処理手段とを具備することを特徴とする。
【発明の効果】
【0011】
本発明によれば、軽い演算負担で駆動雑音発生区間を決定でき、効率的に駆動雑音を除去できる。
【図面の簡単な説明】
【0012】
【図1】本発明の一実施例の中央断面図を示す。
【図2】図1に示す実施例の概略構成ブロック図である。
【図3】本実施例における雑音除去処理のフローチャートである。
【図4】駆動雑音が混入した音声信号の波形例と特定周波数成分例である。
【図5】雑音除去処理区間を説明するタイミングチャートである。
【図6】雑音除去処理区間の音声を予測する処理の説明図である。
【図7】光学要素毎の解析区間長、特徴周波数及び音圧閾値の表である。
【図8】駆動手段毎の駆動雑音例である。
【図9】第2実施例のシステム構成図である。
【図10】図9に示す構成の概略構成ブロック図である。
【図11】外部演算処理装置の雑音除去処理のフローチャートである。
【図12】メモリ134を取り外して音声信号等を転送するシステムの構成図である。
【発明を実施するための形態】
【0013】
以下、図面を参照して、本発明の実施例を詳細に説明する。
【実施例1】
【0014】
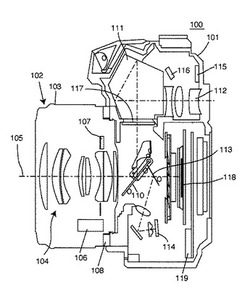
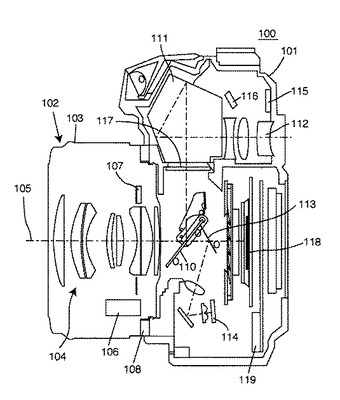
図1は、本発明に係る撮像装置の一実施例であるデジタル一眼レフカメラの中央断面図を示す。
【0015】
100は本発明の一実施例であるデジタル一眼レフカメラを示す。101はデジタル一眼レフカメラ100のカメラボディを示す。102は撮影レンズを示す。撮影レンズ102は、レンズ鏡筒103内に光軸105を有する撮像光学系104からなる。撮像光学系104は、フォーカスレンズ群、手ブレ補正レンズユニット及び絞り機構、これらを駆動する光学系駆動部106、並びに光学系駆動部106を制御するレンズ制御部107を有する。撮像光学系104は、レンズマウント接点108でカメラボディ101と電気的に接続する。
【0016】
撮影レンズ102の前方から入射する被写体光学像は、光軸105を通ってカメラボディ101に入射する。入射光の一部は、ハーフミラーで構成された主ミラー110で反射され、フォーカルスクリーン117上に結像する。ユーザ又は撮影者は、フォーカルスクリーン117上に結象した光学象を、ペンタプリズム111を通して接眼窓112から視認出来る。これらは、光学ビューファインダ構成となる。
【0017】
AEセンサ116は、フォーカルスクリーン117上に結像した光学象の明るさを検出する。また、主ミラー110を透過した被写体光学像は、サブミラー113で反射され、AFセンサ114に入射する。AFセンサ114の出力は、被写体像の焦点検出演算に用いられる。AEセンサ116は、フォーカルスクリーン117の全体、若しくは、1又は複数の所定部分の露光量を検出する。
【0018】
カメラボディ101内にある不図示のレリーズボタンが操作され、撮影開始命令が発せられると、主ミラー110及びサブミラー113は、被写体光学像が撮像素子118に入射するように撮影光路から退避する。
【0019】
AFセンサ114及びAEセンサ116の検出出力、並びに撮像素子118の出力は、カメラ制御部119に供給される。カメラ制御部119は、これらの信号に従い、カメラ100の全体を制御する。
【0020】
動画撮影時には、音声入力手段であるマイク115が、外部の音声を取り込み、音声信号に変換してカメラ制御部119に供給する。この音声信号は、撮像素子118から出力される画像信号と同期して、記録処理される。
【0021】
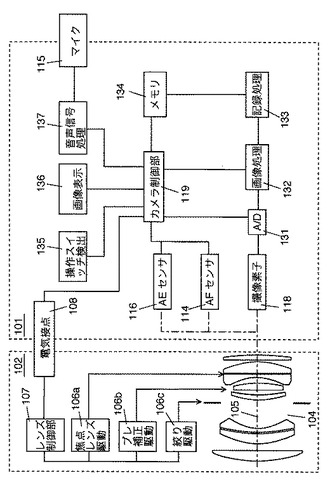
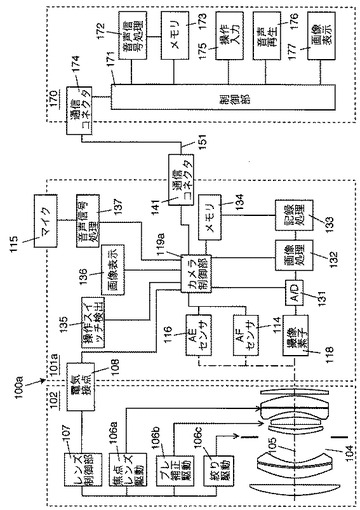
図2は、デジタル一眼レフカメラ100の概略構成ブロック図である。カメラ100は、撮像系、画像処理系、音声処理系、記録再生系及び制御系を有する。撮像系は、撮像光学系104及び撮像素子118を含む。画像処理系は、A/D変換器131及び画像処理回路132を含む。音声処理系は、マイク115および音声信号処理回路137を含む。記録再生系は、記録処理装置133及びメモリ134を含む。制御系は、光学系駆動部106、レンズ制御部107、カメラ制御部119、AFセンサ114、AEセンサ116及び操作スイッチ検出部135を含む。光学系駆動部106は、焦点レンズ駆動部106a、ブレ補正駆動部106b及び絞り駆動部106cなどから構成されている。
【0022】
撮像系は、被写体などの物体からの光を撮像光学系104により撮像素子118の撮像面に結像する光学処理系である。エイミングなどの撮影予備動作中は、主ミラー110に設けられたミラーを介して、焦点検出部であるAFセンサ114にも光束の一部が導かれる。後述するように、制御系が適切に撮像光学系を調整することで、適切な光量の物体光が撮像素子118に入射するとともに、撮像素子118の近傍で被写体像が結像する。
【0023】
A/D変換器131は、撮像素子118の出力画像信号をデジタル化して、画像処理回路132に入力する。画像処理回路132は、A/D変換器131からの画像データを処理する回路であり、ホワイトバランス回路、ガンマ補正回路、及び、補間演算による高解像度化を行う補間演算回路等を有する。
【0024】
音声処理系では、音声信号処理回路137が、マイク115の出力信号に適切な処理を施して録音用音声信号を生成する。録音用生成信号は、後述する記録処理部により画像データとリンクして記録処理される。
【0025】
記録処理装置133は、メモリ134に画像データを出力するとともに、画像表示装置136に出力すべき画像の画像データを生成し保存する。また、記録処理装置133は、所定の方法で画像データ、動画データ及び音声データをデータ圧縮し、記録媒体に記録する手段である。
【0026】
カメラ制御部119は、撮像の際のタイミング信号などを生成して出力する。焦点検出部としてのAFセンサ114は、被写体のピント状態を検出し、露出検出部としてのAEセンサ116は、被写体の輝度を検出する。レンズ制御部107は、カメラ制御部119からの制御信号に応じて、撮像光学系104の焦点、ズーム及び絞りを調整する。
【0027】
制御系は、外部操作に連動して撮像系、画像処理系及び記録再生系をそれぞれ制御する。例えば、操作スイッチ検出部135は、不図示のシャッタレリーズ釦の押下を検出する。カメラ制御部119は、この検出出力に応じて、撮像素子118の駆動、画像処理回路132の動作、及び記録処理装置133の圧縮処理などを制御する。カメラ制御部119はまた、画像表示装置136を構成する光学ファインダ及び/又は液晶モニタ等による情報表示を制御する。
【0028】
撮像光学系の調整動作を説明する。カメラ制御部119は、AFセンサ114及びAEセンサ116の検出出力に従い、適切な焦点位置と絞り位置を決定し、その位置への制御を示す制御信号をレンズ制御部107に供給する。レンズ制御部107は、カメラ制御部119からの制御信号に従い、焦点レンズ駆動部106a及び絞り駆動部106cにそれぞれ焦点レンズ及び絞りを駆動させる。
【0029】
レンズ制御部107には、不図示の手ブレ検出センサが接続する。手ぶれ補正モードでは、レンズ制御部107は、手ブレ検出センサの検出出力に従いブレ補正駆動部106bを制御して手ブレを軽減させる。
【0030】
動画撮影時には、主ミラー110及びサブミラー113が光軸105から撮像素子118に入射する光路から退避するので、AFセンサ114及びAEセンサ116には、被写体光学像が入射しない。このとき、カメラ制御部119は、焦点レンズ駆動部106aの駆動量と撮像素子118から出力される連続的な画像信号を用いて、いわゆる山登り方式と呼ばれる焦点検出方法で撮像光学系のピント状態を調節する。また、カメラ制御部119は、撮像素子118から出力される画像信号を用いて、被写体の輝度を算出し、絞りを調節する。
【0031】
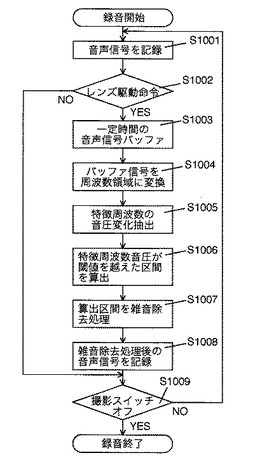
図3から図7を用いて、動画撮影時の音声信号録音中に、撮像光学系104の駆動雑音が混入する場合の雑音除去方法を説明する。ここでは、絞り駆動部106cが動作したとする。図3は、本実施例の雑音除去処理のフローチャートを示す。
【0032】
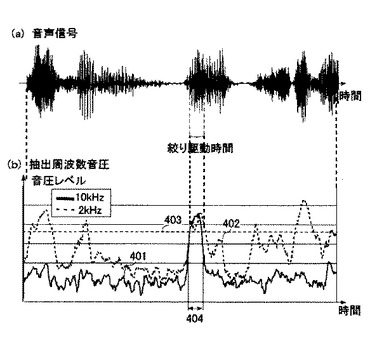
図4は、音声信号の波形例と抽出周波数の音圧レベルの変化例を示す。図4(a)は、マイク115で取得される音声信号の波形例を示し、横軸は時間を、縦軸は、マイク115の出力音声信号の電圧レベルをそれぞれ示す。図4(b)は、図4(a)に示す音声信号の、10kHzと2kHzの周波数成分の音圧変化を示す。横軸は時間を示し、縦軸は音圧レベルを示す。
【0033】
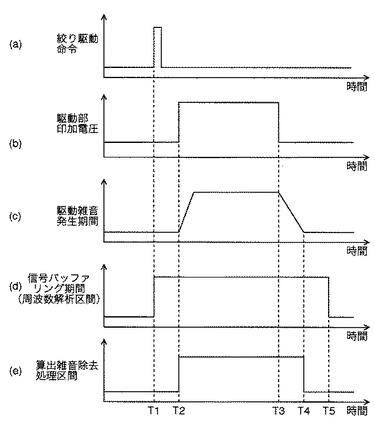
図5は、撮影レンズ102の絞りを絞り駆動部106cが駆動するときのタイミングチャートを示す。図5(a)は、カメラボディ101からの撮影レンズ102への絞り駆動命令を示す。図5(b)は、絞り駆動部106cが実際に絞りを駆動する駆動電圧を示す。図5(c)は、絞り駆動部106cから発する駆動雑音発生期間を示す。図5(d)は、一定時間の音声信号をバッファリングし雑音除去処理をする区間を決定する為に周波数解析を行う期間を示す。図5(e)は、周波数解析の結果から算出された雑音除去処理区間を示す。
【0034】
デジタル一眼レフカメラ100の不図示の動画撮影スイッチが押されると、動画撮影が開始され、同時に録音動作も開始される。
【0035】
マイク115により取得され出力される音声信号は、音声信号処理回路137を介して映像信号と同期してメモリ134に記憶される(S1001)。
【0036】
カメラ制御部119は、光学系駆動部106の駆動を指示する命令の有無を判断する(S1002)。例えば,ユーザ操作による絞りの調整であったり、合焦動作のための焦点レンズ駆動動作であったりする。駆動命令が検出されない場合(S1002)、カメラ制御部119は、動画撮影スイッチがオフかどうかを調べる(S1009)。動画撮影スイッチがオフでない場合(S1009)、カメラ制御部119は、ステップS1001に戻り、引き続き音声信号の記録動作を行う。動画撮影スイッチがオフであると(S1009)、カメラ制御部119は、音声記録を含む撮影動作を終了する。
【0037】
駆動命令が検知された場合(S1002)、カメラ制御部119は、図5(d)に示すように、駆動命令から一定期間の音声信号をバッファリングする(S1003)。バッファリングされる音声信号では、図4(a)に示すように、絞り駆動期間において、取り込まれる音声信号に絞り駆動雑音が混入する。
【0038】
カメラ制御部119は、レンズ駆動命令から一定時間の、バッファリングした音声信号についてフレーム分割し、連続的に各フレームでフーリエ変換を行い周波数領域に変換する(S1004)。カメラ制御部119は、S1004で周波数領域に変換した音声信号から絞り駆動雑音の特徴周波数の音圧変化を抽出する(S1005)。図4(b)に示す波形例では、10KHzの音圧変化401が駆動雑音の成分であり、2kHzの音圧変化402が、被写体からの音声信号の成分である。理解を容易にするため、図4(b)では、バッファリング期間以外の期間についても、駆動雑音成分の音圧変化を図示してある。
【0039】
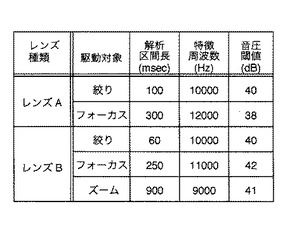
図4(b)から容易に理解できるように、2kHz成分402は時間的に激しい音圧変化が起こっており、この変化から絞り駆動時間を判断することは困難である。一方、10kHz成分401は、被写体音声のみの期間ではあまり音圧変化がないが、絞り駆動期間では大きく音圧が変化している。レンズ駆動期間の代表として絞り駆動期間を例示したが、その他の要素でも良いことは勿論である。また、特徴周波数成分として10KHzの成分を示したが、これも一例であり、駆動雑音に多く含まれるが被写体音声信号に余り含まれない周波数帯域なら他の周波数でもかまわない。レンズ制御部107は、撮影レンズ102ごと及びその駆動要素ごとの特徴周波数と判定閾値、図7に示すようなデータテーブルとして保持し、必要時にカメラ制御部119に転送する。
【0040】
カメラ制御部119は、次に、ステップS1005で抽出した特徴周波数の音圧が予め定めた閾値を越えている区間を算出する(S1006)。ステップS1006では、10kHz成分401の音圧が閾値403を越えている区間を算出し、雑音除去を行う雑音除去処理区間404を決定する。
【0041】
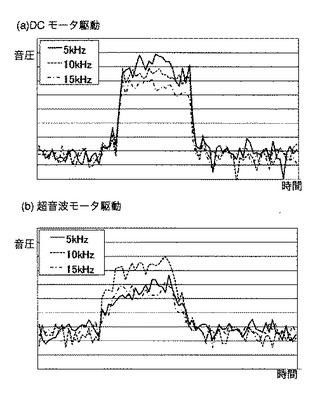
駆動雑音は、レンズの種類及び駆動動作ごとにその特徴となる周波数帯域が異なり、また発生する音圧レベルも異なる。例えば、図8は、フォーカスレンズ駆動のアクチュエータ方式の異なる2種類のレンズの駆動音の5kHz、10kHz及び15kHzの成分を示す。縦軸は音圧レベルを示し、横軸は時間を示す。図8(a)は、アクチュエータがDCモータであるレンズの各周波数の音圧変化を示し、図8(b)は、アクチュエータが超音波モータである場合のレンズの各周波数の音圧変化を示す。DCモータの場合、5kHz、10kHz及び15kHzの各周波数成分がほぼ一様に含まれている。他方、超音波モータの場合、10kHzの帯域が多く含まれ、5kHz及び15kHzの成分は、10kHzの成分に比べると低い。また、超音波モータの音圧レベルは、DCモータのそれに比べて各周波数帯域で低くなっている。
【0042】
前述のように、被写体音との区別を明確にするためには、被写体音の含まれない周波数帯域で閾値を持つことが好ましい。しかし、レンズの種類及び駆動動作によって特徴となる周波数と音圧レベルが異なるので、レンズの種類及び駆動動作ごとに閾値を持つことが好ましい。閾値403は、図7に示すように、レンズ種類及び駆動動作ごとに異なる値として、レンズ制御部107に格納されており、必要時にカメラ制御部119に転送される。
【0043】
カメラ制御部119は、ステップS1006で算出された雑音除去処理区間404について雑音除去処理を行う(S1007)。雑音除去処理の具体的方法は、後述する。
【0044】
カメラ制御部119は、記録処理装置133を制御して、ステップS1007で雑音除去処理された音声信号を撮影動画に同期して記録させる(S1008)。バッファリングされた音声信号のうちの雑音除去処理区間以外の音声信号は、雑音除去処理を施されること無しに、そのまま記録処理される。
【0045】
カメラ制御部119は、動画撮影スイッチがオフになったかどうかを判断する(ステップS1009)。動画撮影スイッチがオフであれば録音を終了する。動画撮影スイッチがオフでなければ、ステップS1001に戻り、引き続き音声信号の録音動作が行われる。
【0046】
図5に示すタイミングチャートを参照して、絞り駆動期間と周波数変換区間又は周波数解析区間の関係を説明する。
【0047】
時刻T1において、カメラ制御部119から絞り駆動命令が発せられると、T1からT5の一定時間の音声信号がバッファリングされる。バッファリング期間は、撮影レンズ102と撮影レンズ102の駆動を行う要素によって異なり、駆動時間の前後に一定の余剰時間を加えた期間となる。バッファリング期間の長さを示す解析区間長は、図7に示すようなデータテーブルに格納されている。このデータテーブルは、撮影レンズ102内のメモリに格納されており、カメラボディ101との接続時に、カメラ制御部119又はメモリ134に転送され、記憶される。また、カメラボディ101に撮影レンズ102が装着されたときに、光学系駆動部106により各レンズ要素を駆動して、その駆動時間を測定し、その測定時間からバッファリング期間を決定しても良い。カメラボディ101内の例えばメモリ134に撮影レンズ102の種類毎の上記データテーブルを格納し、装着された撮影レンズの種類を判別して、適用すべきデータテーブルを決定するようしてもよい。
【0048】
レンズ制御部107は、カメラ制御部119からの絞り駆動命令に従い、時刻T2に絞り駆動部106cに絞りを駆動させる。絞り駆動命令発生(時刻T1)から絞り駆動開始(時刻T2)の間には、タイムラグが生じる。時刻T2に絞り駆動部106cが絞りを駆動し、これにより、駆動雑音が発生する。
【0049】
時刻T3において、絞り駆動部106cの駆動電圧が低下し、絞り駆動動作が終了する。しかし、絞り駆動で発生する駆動雑音には残響音があり、時刻T4まで継続する。そこで、残響音時間も加味したT1〜T5の一定時間長についてバッファリングと周波数解析を行う。これにより、レンズ駆動命令から実際の駆動開始までのタイムラグ、及び、駆動雑音の残響時間を含むT2〜T4の正確な駆動雑音発生期間を決定でき、精度の高い雑音除去処理が可能になる。
【0050】
図6を参照して、本実施例で用いる雑音除去処理を説明する。本実施例の雑音除去処理では、駆動雑音発生期間の前後の音声信号を用いて、駆動雑音発生期間内の音声信号を予測する予測処理を行う。図6は、各処理手順における音声信号波形を示す。横軸は時間を示し、縦軸は信号レベルを示す。図6(a)は、被写体からの音声信号に絞り駆動雑音が混入している音声信号を示す。図6(b)は、雑音除去処理のための予測処理を行う途中の段階の音声信号を示す。図6(c)は、図6(a)に示す音声信号に予測処理を適用した後の音声信号を示す。
【0051】
予測処理では、図6(b)に示すように、雑音除去処理区間の音声信号、すなわち、駆動雑音が混入している音声信号を破棄する。学習動作と予測動作を行い、予測動作により求めた信号で、雑音除去処理区間の音声信号を補間する。
【0052】
本実施例の音声予測は、線形予測係数の導出(学習動作)と、線形予測係数を用いた信号予測(予測動作)とからなり、これらの動作を以下、説明する。
【0053】
線形予測を用いるにあたり、現在の信号とこれに隣接する有限個(ここではp個とおく)の標本値との間に、次のような線形1次結合関係を仮定する。すなわち、
【数1】

但し、式(1)において、εtは、平均値0、分散σ2の互いに無相関な確率変数である。
【0054】
ここでxtが過去の値から予測されるように式を変形すると、
【数2】
となる。
【0055】
式(2)によると、εtが十分に小さければ、近傍p個の線形和によって現在の値が表現される。xtを上記の予測によって求めた後、さらにその近似が十分によければ、xt+1も同じく近傍p個の線形和によって求められる。
【0056】
このように、εtを十分に小さくすることが出来れば、順次値を予測して信号を求めることが出来る。そこで、εtを最小にするようなαiを求めることを考える。本実施例では、εtを最小にするようなαiを求める動作を学習動作と呼ぶ。
【0057】
前述した学習区間において、Σεt2を最小化すればよい。学習の開始時間をt0、終了時間t1とすると、
【数3】
ただし、α0=1である。ここで、式(3)を簡単化するために、
【数4】
とおく。式(3)を最小化するようにαiを決めるためには、式(3)のαjを(j=1,2,・・・,p)に関する偏微分を0として解けばよい。この結果、
【数5】
が得られる。式(5)は、p個の線形連立1次方程式を解けば、αiを決定できることを示している。式(5)のcijは、xt−i(i=1,2,・・・,p)から求めることができる。
【0058】
式(5)に従ってαiを決定した場合、Σεt2は最小化されている。このとき、式(2)から、xtの値は、
【数6】
と近似できる。この近似が十分に良いものであれば、xtの代わりに、式(6)の右辺を予測信号として用いることができる。
【0059】
さらに、xt+1についても同様に、近傍のp−1個と、予測によって求めた信号とから近似値を得ることが出来る。
【0060】
このような処理を順次、繰り返すことで、予測区間の信号を生成出来る。本実施例では、求められたαiから予測区間の近似を求める動作を予測動作と呼ぶ。
【0061】
図6に示す波形例での、学習動作と予測動作を説明する。図6に示すように、学習動作を行うに当たっては、予測区間の前後の信号を用いる。これは、音声信号が、極く短時間の領域に着目すると、比較的繰り返し性が高いという性質を利用している。図6に示すように、駆動雑音が存在する区間より時間的に先行して繋がる区間を学習区間1とし、駆動雑音が存在する区間よりも時間的に遅れて繋がる区間を学習区間2とする。
【0062】
学習動作および予測動作では、学習区間1と学習区間2の信号に対して夫々独立に計算を行う。学習区間1で学習動作を行った後に予測区間の信号を生成することを、前方からの予測、略して前方予測と呼ぶ。他方、学習区間2で学習動作を行った後に予測区間の信号を生成することを、後方からの予測、略して後方予測と呼ぶ。予測区間の信号の計算では、学習区間1に近いほど前方予測による値の重みを大きくし、学習区間2に近いほど後方予測による値の重みを大きくするように、前方予測と後方予測を重み付けする。
【0063】
以上、説明したように、駆動信号に基づいて一定期間を周波数解析することにより、雑音除去処理区間を決定することで、常時、周波数解析を行わなくても良くなり、演算負荷が軽減される。また、別途、雑音検出手段を設ける必要がないので、コストダウン、筐体構造の簡単化及び省電力化が図ることができる。正確に駆動雑音発生区間を検出できるので、雑音除去処理性能が向上する。特に、予測処理による雑音除去処理において、駆動雑音区間を正確に決定できることにより、予測精度の向上が見込まれる。
【0064】
絞り駆動音に対する駆動雑音除去処理を説明したが、その他の光学要素による駆動雑音の除去にも適用可能である。一般的には、駆動雑音または雑音の発生タイミングが操作釦やカメラ制御部で検知できるものについても、適用可能である。例えば、焦点レンズ駆動、振れ補正レンズ駆動、不図示の振れ補正レンズのロック機構の駆動、撮像素子シフト式振れ補正駆動、電動ズームレンズ駆動、及び撮像素子のウォブリング駆動等がある。更には、操作音を発生する操作釦の操作及びストロボのポップアップ駆動などがある。
【0065】
雑音除去処理手法として駆動雑音発生区間の前後の音声信号から駆動雑音発生区間の音声信号を予測して再現する予測処理を説明したが、他の方法も利用可能である。例えば、駆動雑音発生区間の信号を0にして無音にしてしまうミュート手段や、周波数領域に変換して特徴周波数の差分を行うスペクトルサブトラクション法などを利用できる。ミュート手段では、雑音除去区間の音声信号を単純に0にしてしまうだけなので、演算処理負荷が非常に軽い。また、ミュートによる無音区間が短いほうが、聴音時に違和感は少なくなるので、本発明で提案するように雑音発生区間を出来るだけ正確に求めることは有効である。スペクトルサブトラクション法では、予め駆動雑音のみを録音し周波数領域に変換した情報を記録しておき、駆動雑音が混入した被写体音信号の周波数領域情報から、駆動雑音のみの周波数領域情報を差し引いて雑音除去を行う。ハムノイズ等の定常的な雑音除去に対しては処理を行いやすいが、絞りの駆動雑音のような突発的な雑音除去については、実際の駆動雑音混入区間に対して駆動雑音のみの周波数領域情報から差し引く位置が時間方向にずれると、雑音除去の性能が低下する。よって、本発明で提案するように雑音発生区間を出来るだけ正確に求めることは、雑音除去手法としてスペクトルサブトラクション法を用いる場合においても有効である。
【実施例2】
【0066】
上記実施例では、音声取り込み時に駆動雑音を除去したが、事後的に駆動雑音を除去しても良い。具体的には、駆動雑音が混入した音声信号と共に、駆動雑音の発生タイミングを示す信号を記録し、これらの両方を駆動雑音除去装置に転送して、駆動雑音を除去させる。もちろん、駆動雑音の特性を示すデータも同時に記録し、駆動雑音除去装置に転送しても良い。駆動雑音の特性を示すデータには、駆動雑音の種類、駆動雑音期間判定の閾値、及び駆動雑音の継続時間等がある。
【0067】
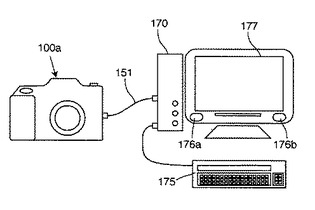
図9は、デジタル一眼レフカメラと、駆動雑音除去装置としての外部演算処理装置からなるシステムの概略構成図である。デジタル一眼レフカメラ100aは、通信ケーブル151を介して外部演算処理装置170に接続する。図10は、図9に示すシステム構成の概略構成ブロック図を示す。カメラ100aは、カメラボディ101aに外部装置との接続用の通信コネクタ141を有している。通信コネクタ141は、通信ケーブル151を介して外部演算処理装置170の通信コネクタ174と電気的に接続する。実施例1と同じ機能の要素には、同じ符号を付してある。
【0068】
外部演算処理装置170は、制御部171、音声信号処理回路172、メモリ173、操作入力部175、音声再生装置176及び画像表示装置177を有する。
【0069】
制御部171は、操作者による操作入力部175の操作に従い、雑音除去処理を含む動作に各部を制御する。雑音除去処理の経過を含む制御結果は、音声再生装置176及び画像表示装置177に出力される。
【0070】
雑音除去処理では、制御部171は、通信コネクタ174を介して、カメラ100aから駆動雑音を除去されていない音声信号を含む動画記録データと、駆動雑音発生タイミングを示す信号とを受信する。音声信号処理回路172は、カメラ100aからの駆動雑音を含む音声信号に、実施例1と同様の雑音除去処理を施してメモリ173に記録する。
【0071】
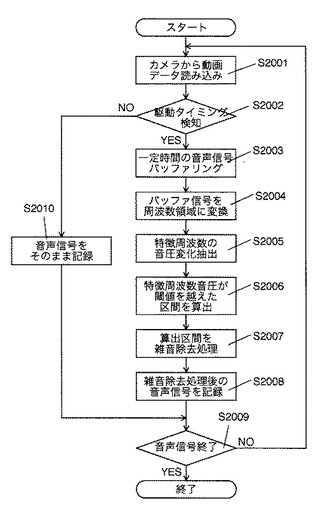
図11は、外部演算処理装置170における駆動雑音低減処理のフローチャートを示す。操作者が操作入力部175により雑音除去処理の開始を制御部171に指示すると、図11に示すフローチャートが開始される。
【0072】
外部演算処理装置170は、通信ケーブル151を介して、カメラボディ101aのメモリ134に記録された駆動雑音が混入した音声信号及び駆動タイミング信号を含む動画記録データを読み込む(S2001)。
【0073】
制御部171は、読み込んだ音声信号に同期した駆動信号タイミングが存在しているか否かを判断する(S2002)。音声信号に同期した駆動タイミング信号が検出されない場合(S2002)、制御部171は、音声信号をそのまま記録する(S2010)。そして、制御部171は、処理対象の音声信号が終了しているかどうかを調べる(S2009)。音声信号が終了していない場合(S2009)、制御部171は、ステップS2001に戻り、引き続き音声信号のカメラ100aからの読み込みを続ける。音声信号が終了していると(S2009)、制御部171は、駆動雑音除去処理を終了する。
【0074】
音声信号に同期した駆動タイミング信号が存在する場合(S2002)、駆動タイミング信号から一定時間の音声信号をバッファリングする(S2003)。以後のステップS2004〜S2007は、音声信号処理回路172が雑音除去処理を行うことを除いて、その処理内容が図3のステップS1004〜S1007と同様であるので、詳細な説明を省略する。
【0075】
音声信号処理回路172は、雑音除去処理を施した音声信号をメモリ173に記録する(S2008)。制御部171は、処理対象の音声信号が終了しているかどうかを調べる(S2009)。音声信号が終了していない場合(S2009)、制御部171は、ステップS2001に戻り、引き続き音声信号のカメラ100aからの読み込みを続ける。音声信号が終了していると(S2009)、制御部171は、駆動雑音除去処理を終了する。
【0076】
雑音除去処理を施された音声信号は、カメラ100aからの動画データに含まれる画像データと同期して、メモリ173に記録される。雑音除去処理を施した音声信号をカメラ100aのメモリ134に書き戻して、メモリ134の駆動雑音を含む音声信号に上書きしてもよい。
【0077】
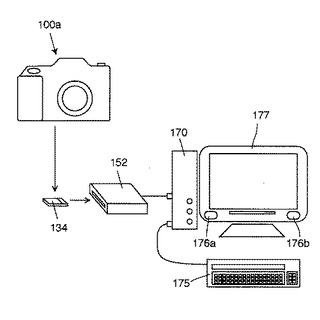
メモリ134がカメラボディ101aから取り外し可能な場合には、図12に示すように、メモリカードリーダ152で外部演算処理装置に必要なデータを転送してもよい。
【技術分野】
【0001】
本発明は、撮像装置及び駆動雑音除去装置に関し、より具体的には、デジタルコンパクトカメラ及びデジタル一眼レフカメラ等の、録音装置を有する撮像装置、及び音声信号から駆動雑音を除去する駆動雑音除去装置に関する。
【背景技術】
【0002】
静止画撮影のほかに音声信号記録を伴う動画撮影を行う機能を有するデジタルカメラが商品化されている。動画撮影時には、撮影状態の変更によりフォーカスレンズの駆動や輝度変化による絞り機構の駆動など、撮像装置駆動部が動作し、これが、音声信号記録に対する雑音となってしまう。そこで、このような駆動雑音を低減する技術が、提案されている。
【0003】
特許文献1には、雑音を除去する手法の一つのスペクトルサブトラクション法を有する撮像装置が記載されている。ズームレンズを駆動させるためのズームキー操作に対し、ズームレンズ駆動モータの駆動に同期して、マイクにより取り込まれる音声信号への雑音除去処理を有効化する。
【0004】
特許文献2には、駆動雑音を発生させる駆動モータの近傍に参照用マイクを設け、参照用マイクに入力される駆動音が一定レベルを超えたとき雑音除去処理を実行する技術が記載されている。参照マイクの信号を基に雑音を検知しているので、駆動モータへの駆動信号タイミングと実際に駆動モータが駆動して駆動雑音を発生したタイミングでのタイムラグを極力減らすことができる。
【0005】
特許文献3には、携帯電話などの音声信号を符号化して伝送する通信装置におおいて、突発的な雑音を精度良く検知する技術が記載されている。具体的には、通信時に取得する音声信号を、一定時間長のフレームに分割すると共にフレームごとの信号を周波数帯域に変換し、周波数帯域ごとの信号レベルの変化を監視して突発的な雑音を検知する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−279185号公報
【特許文献2】特開2006−287387号公報
【特許文献3】特開2001−344000号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
音声信号に混入した雑音を除去する雑音除去技術では、雑音除去処理の区間を正確に求めることが必要である。特許文献1に記載の技術では、ズームキー操作タイミングに応じて雑音処理区間を決定するので、そのタイミング信号が不正確な場合には精度よい雑音処理ができない。特許文献2に開示される技術では、音声信号を入力する主マイクと共に、別の雑音取得用の参照マイクを具備しなければならず、部品点数が増えてしまう。また、参照マイクに常に電力を供給しておかなければならず、デジタルカメラにおいては電力消費の面で不利である。特許文献3に記載される技術では、音声信号入力中に常時、周波数領域への変換を行う演算を行わなければならない。周波数領域への変換演算として一般に知られているフーリエ変換は、演算量の上で負荷が非常に高い。
【0008】
本発明は、このような不都合を解消し、適切に雑音を除去できる撮像装置及び駆動雑音除去装置を提示することを目的とする。
【課題を解決するための手段】
【0009】
本発明に係る撮像装置は、被写体像を結像する撮像光学系と、前記撮像光学系から導かれる被写体像を撮像する撮像素子と、前記撮像光学系の光学要素を変化させる光学系駆動手段と、前記光学系駆動手段を駆動命令により制御する制御手段と、音声信号を取得する音声入力手段と、前記駆動命令からの所定の解析区間にある雑音除去区間であって、前記音声入力手段の出力に含まれる、前記光学系駆動手段の駆動雑音の特徴周波数の成分から雑音除去区間を決定する決定手段と、前記音声入力手段の出力から前記雑音除去区間の雑音を除去する音声信号処理手段と、前記音声信号処理手段の出力信号を記録する記録手段とを具備することを特徴とする。
【0010】
本発明に係る駆動雑音除去装置は、駆動手段による駆動で発生する駆動雑音が混入する音声信号から前記駆動雑音を低減する駆動雑音除去装置であって、前記音声信号、及び、前記音声信号に同期する、前記駆動手段の駆動タイミングを示す駆動タイミング信号を取り込む手段と、前記駆動タイミング信号からの所定の解析区間にある雑音除去区間であって、前記音声信号に含まれる前記駆動雑音の特徴周波数の成分から雑音除去区間を決定する決定手段と、前記音声信号から前記雑音除去区間の前記駆動雑音を除去する音声信号処理手段とを具備することを特徴とする。
【発明の効果】
【0011】
本発明によれば、軽い演算負担で駆動雑音発生区間を決定でき、効率的に駆動雑音を除去できる。
【図面の簡単な説明】
【0012】
【図1】本発明の一実施例の中央断面図を示す。
【図2】図1に示す実施例の概略構成ブロック図である。
【図3】本実施例における雑音除去処理のフローチャートである。
【図4】駆動雑音が混入した音声信号の波形例と特定周波数成分例である。
【図5】雑音除去処理区間を説明するタイミングチャートである。
【図6】雑音除去処理区間の音声を予測する処理の説明図である。
【図7】光学要素毎の解析区間長、特徴周波数及び音圧閾値の表である。
【図8】駆動手段毎の駆動雑音例である。
【図9】第2実施例のシステム構成図である。
【図10】図9に示す構成の概略構成ブロック図である。
【図11】外部演算処理装置の雑音除去処理のフローチャートである。
【図12】メモリ134を取り外して音声信号等を転送するシステムの構成図である。
【発明を実施するための形態】
【0013】
以下、図面を参照して、本発明の実施例を詳細に説明する。
【実施例1】
【0014】
図1は、本発明に係る撮像装置の一実施例であるデジタル一眼レフカメラの中央断面図を示す。
【0015】
100は本発明の一実施例であるデジタル一眼レフカメラを示す。101はデジタル一眼レフカメラ100のカメラボディを示す。102は撮影レンズを示す。撮影レンズ102は、レンズ鏡筒103内に光軸105を有する撮像光学系104からなる。撮像光学系104は、フォーカスレンズ群、手ブレ補正レンズユニット及び絞り機構、これらを駆動する光学系駆動部106、並びに光学系駆動部106を制御するレンズ制御部107を有する。撮像光学系104は、レンズマウント接点108でカメラボディ101と電気的に接続する。
【0016】
撮影レンズ102の前方から入射する被写体光学像は、光軸105を通ってカメラボディ101に入射する。入射光の一部は、ハーフミラーで構成された主ミラー110で反射され、フォーカルスクリーン117上に結像する。ユーザ又は撮影者は、フォーカルスクリーン117上に結象した光学象を、ペンタプリズム111を通して接眼窓112から視認出来る。これらは、光学ビューファインダ構成となる。
【0017】
AEセンサ116は、フォーカルスクリーン117上に結像した光学象の明るさを検出する。また、主ミラー110を透過した被写体光学像は、サブミラー113で反射され、AFセンサ114に入射する。AFセンサ114の出力は、被写体像の焦点検出演算に用いられる。AEセンサ116は、フォーカルスクリーン117の全体、若しくは、1又は複数の所定部分の露光量を検出する。
【0018】
カメラボディ101内にある不図示のレリーズボタンが操作され、撮影開始命令が発せられると、主ミラー110及びサブミラー113は、被写体光学像が撮像素子118に入射するように撮影光路から退避する。
【0019】
AFセンサ114及びAEセンサ116の検出出力、並びに撮像素子118の出力は、カメラ制御部119に供給される。カメラ制御部119は、これらの信号に従い、カメラ100の全体を制御する。
【0020】
動画撮影時には、音声入力手段であるマイク115が、外部の音声を取り込み、音声信号に変換してカメラ制御部119に供給する。この音声信号は、撮像素子118から出力される画像信号と同期して、記録処理される。
【0021】
図2は、デジタル一眼レフカメラ100の概略構成ブロック図である。カメラ100は、撮像系、画像処理系、音声処理系、記録再生系及び制御系を有する。撮像系は、撮像光学系104及び撮像素子118を含む。画像処理系は、A/D変換器131及び画像処理回路132を含む。音声処理系は、マイク115および音声信号処理回路137を含む。記録再生系は、記録処理装置133及びメモリ134を含む。制御系は、光学系駆動部106、レンズ制御部107、カメラ制御部119、AFセンサ114、AEセンサ116及び操作スイッチ検出部135を含む。光学系駆動部106は、焦点レンズ駆動部106a、ブレ補正駆動部106b及び絞り駆動部106cなどから構成されている。
【0022】
撮像系は、被写体などの物体からの光を撮像光学系104により撮像素子118の撮像面に結像する光学処理系である。エイミングなどの撮影予備動作中は、主ミラー110に設けられたミラーを介して、焦点検出部であるAFセンサ114にも光束の一部が導かれる。後述するように、制御系が適切に撮像光学系を調整することで、適切な光量の物体光が撮像素子118に入射するとともに、撮像素子118の近傍で被写体像が結像する。
【0023】
A/D変換器131は、撮像素子118の出力画像信号をデジタル化して、画像処理回路132に入力する。画像処理回路132は、A/D変換器131からの画像データを処理する回路であり、ホワイトバランス回路、ガンマ補正回路、及び、補間演算による高解像度化を行う補間演算回路等を有する。
【0024】
音声処理系では、音声信号処理回路137が、マイク115の出力信号に適切な処理を施して録音用音声信号を生成する。録音用生成信号は、後述する記録処理部により画像データとリンクして記録処理される。
【0025】
記録処理装置133は、メモリ134に画像データを出力するとともに、画像表示装置136に出力すべき画像の画像データを生成し保存する。また、記録処理装置133は、所定の方法で画像データ、動画データ及び音声データをデータ圧縮し、記録媒体に記録する手段である。
【0026】
カメラ制御部119は、撮像の際のタイミング信号などを生成して出力する。焦点検出部としてのAFセンサ114は、被写体のピント状態を検出し、露出検出部としてのAEセンサ116は、被写体の輝度を検出する。レンズ制御部107は、カメラ制御部119からの制御信号に応じて、撮像光学系104の焦点、ズーム及び絞りを調整する。
【0027】
制御系は、外部操作に連動して撮像系、画像処理系及び記録再生系をそれぞれ制御する。例えば、操作スイッチ検出部135は、不図示のシャッタレリーズ釦の押下を検出する。カメラ制御部119は、この検出出力に応じて、撮像素子118の駆動、画像処理回路132の動作、及び記録処理装置133の圧縮処理などを制御する。カメラ制御部119はまた、画像表示装置136を構成する光学ファインダ及び/又は液晶モニタ等による情報表示を制御する。
【0028】
撮像光学系の調整動作を説明する。カメラ制御部119は、AFセンサ114及びAEセンサ116の検出出力に従い、適切な焦点位置と絞り位置を決定し、その位置への制御を示す制御信号をレンズ制御部107に供給する。レンズ制御部107は、カメラ制御部119からの制御信号に従い、焦点レンズ駆動部106a及び絞り駆動部106cにそれぞれ焦点レンズ及び絞りを駆動させる。
【0029】
レンズ制御部107には、不図示の手ブレ検出センサが接続する。手ぶれ補正モードでは、レンズ制御部107は、手ブレ検出センサの検出出力に従いブレ補正駆動部106bを制御して手ブレを軽減させる。
【0030】
動画撮影時には、主ミラー110及びサブミラー113が光軸105から撮像素子118に入射する光路から退避するので、AFセンサ114及びAEセンサ116には、被写体光学像が入射しない。このとき、カメラ制御部119は、焦点レンズ駆動部106aの駆動量と撮像素子118から出力される連続的な画像信号を用いて、いわゆる山登り方式と呼ばれる焦点検出方法で撮像光学系のピント状態を調節する。また、カメラ制御部119は、撮像素子118から出力される画像信号を用いて、被写体の輝度を算出し、絞りを調節する。
【0031】
図3から図7を用いて、動画撮影時の音声信号録音中に、撮像光学系104の駆動雑音が混入する場合の雑音除去方法を説明する。ここでは、絞り駆動部106cが動作したとする。図3は、本実施例の雑音除去処理のフローチャートを示す。
【0032】
図4は、音声信号の波形例と抽出周波数の音圧レベルの変化例を示す。図4(a)は、マイク115で取得される音声信号の波形例を示し、横軸は時間を、縦軸は、マイク115の出力音声信号の電圧レベルをそれぞれ示す。図4(b)は、図4(a)に示す音声信号の、10kHzと2kHzの周波数成分の音圧変化を示す。横軸は時間を示し、縦軸は音圧レベルを示す。
【0033】
図5は、撮影レンズ102の絞りを絞り駆動部106cが駆動するときのタイミングチャートを示す。図5(a)は、カメラボディ101からの撮影レンズ102への絞り駆動命令を示す。図5(b)は、絞り駆動部106cが実際に絞りを駆動する駆動電圧を示す。図5(c)は、絞り駆動部106cから発する駆動雑音発生期間を示す。図5(d)は、一定時間の音声信号をバッファリングし雑音除去処理をする区間を決定する為に周波数解析を行う期間を示す。図5(e)は、周波数解析の結果から算出された雑音除去処理区間を示す。
【0034】
デジタル一眼レフカメラ100の不図示の動画撮影スイッチが押されると、動画撮影が開始され、同時に録音動作も開始される。
【0035】
マイク115により取得され出力される音声信号は、音声信号処理回路137を介して映像信号と同期してメモリ134に記憶される(S1001)。
【0036】
カメラ制御部119は、光学系駆動部106の駆動を指示する命令の有無を判断する(S1002)。例えば,ユーザ操作による絞りの調整であったり、合焦動作のための焦点レンズ駆動動作であったりする。駆動命令が検出されない場合(S1002)、カメラ制御部119は、動画撮影スイッチがオフかどうかを調べる(S1009)。動画撮影スイッチがオフでない場合(S1009)、カメラ制御部119は、ステップS1001に戻り、引き続き音声信号の記録動作を行う。動画撮影スイッチがオフであると(S1009)、カメラ制御部119は、音声記録を含む撮影動作を終了する。
【0037】
駆動命令が検知された場合(S1002)、カメラ制御部119は、図5(d)に示すように、駆動命令から一定期間の音声信号をバッファリングする(S1003)。バッファリングされる音声信号では、図4(a)に示すように、絞り駆動期間において、取り込まれる音声信号に絞り駆動雑音が混入する。
【0038】
カメラ制御部119は、レンズ駆動命令から一定時間の、バッファリングした音声信号についてフレーム分割し、連続的に各フレームでフーリエ変換を行い周波数領域に変換する(S1004)。カメラ制御部119は、S1004で周波数領域に変換した音声信号から絞り駆動雑音の特徴周波数の音圧変化を抽出する(S1005)。図4(b)に示す波形例では、10KHzの音圧変化401が駆動雑音の成分であり、2kHzの音圧変化402が、被写体からの音声信号の成分である。理解を容易にするため、図4(b)では、バッファリング期間以外の期間についても、駆動雑音成分の音圧変化を図示してある。
【0039】
図4(b)から容易に理解できるように、2kHz成分402は時間的に激しい音圧変化が起こっており、この変化から絞り駆動時間を判断することは困難である。一方、10kHz成分401は、被写体音声のみの期間ではあまり音圧変化がないが、絞り駆動期間では大きく音圧が変化している。レンズ駆動期間の代表として絞り駆動期間を例示したが、その他の要素でも良いことは勿論である。また、特徴周波数成分として10KHzの成分を示したが、これも一例であり、駆動雑音に多く含まれるが被写体音声信号に余り含まれない周波数帯域なら他の周波数でもかまわない。レンズ制御部107は、撮影レンズ102ごと及びその駆動要素ごとの特徴周波数と判定閾値、図7に示すようなデータテーブルとして保持し、必要時にカメラ制御部119に転送する。
【0040】
カメラ制御部119は、次に、ステップS1005で抽出した特徴周波数の音圧が予め定めた閾値を越えている区間を算出する(S1006)。ステップS1006では、10kHz成分401の音圧が閾値403を越えている区間を算出し、雑音除去を行う雑音除去処理区間404を決定する。
【0041】
駆動雑音は、レンズの種類及び駆動動作ごとにその特徴となる周波数帯域が異なり、また発生する音圧レベルも異なる。例えば、図8は、フォーカスレンズ駆動のアクチュエータ方式の異なる2種類のレンズの駆動音の5kHz、10kHz及び15kHzの成分を示す。縦軸は音圧レベルを示し、横軸は時間を示す。図8(a)は、アクチュエータがDCモータであるレンズの各周波数の音圧変化を示し、図8(b)は、アクチュエータが超音波モータである場合のレンズの各周波数の音圧変化を示す。DCモータの場合、5kHz、10kHz及び15kHzの各周波数成分がほぼ一様に含まれている。他方、超音波モータの場合、10kHzの帯域が多く含まれ、5kHz及び15kHzの成分は、10kHzの成分に比べると低い。また、超音波モータの音圧レベルは、DCモータのそれに比べて各周波数帯域で低くなっている。
【0042】
前述のように、被写体音との区別を明確にするためには、被写体音の含まれない周波数帯域で閾値を持つことが好ましい。しかし、レンズの種類及び駆動動作によって特徴となる周波数と音圧レベルが異なるので、レンズの種類及び駆動動作ごとに閾値を持つことが好ましい。閾値403は、図7に示すように、レンズ種類及び駆動動作ごとに異なる値として、レンズ制御部107に格納されており、必要時にカメラ制御部119に転送される。
【0043】
カメラ制御部119は、ステップS1006で算出された雑音除去処理区間404について雑音除去処理を行う(S1007)。雑音除去処理の具体的方法は、後述する。
【0044】
カメラ制御部119は、記録処理装置133を制御して、ステップS1007で雑音除去処理された音声信号を撮影動画に同期して記録させる(S1008)。バッファリングされた音声信号のうちの雑音除去処理区間以外の音声信号は、雑音除去処理を施されること無しに、そのまま記録処理される。
【0045】
カメラ制御部119は、動画撮影スイッチがオフになったかどうかを判断する(ステップS1009)。動画撮影スイッチがオフであれば録音を終了する。動画撮影スイッチがオフでなければ、ステップS1001に戻り、引き続き音声信号の録音動作が行われる。
【0046】
図5に示すタイミングチャートを参照して、絞り駆動期間と周波数変換区間又は周波数解析区間の関係を説明する。
【0047】
時刻T1において、カメラ制御部119から絞り駆動命令が発せられると、T1からT5の一定時間の音声信号がバッファリングされる。バッファリング期間は、撮影レンズ102と撮影レンズ102の駆動を行う要素によって異なり、駆動時間の前後に一定の余剰時間を加えた期間となる。バッファリング期間の長さを示す解析区間長は、図7に示すようなデータテーブルに格納されている。このデータテーブルは、撮影レンズ102内のメモリに格納されており、カメラボディ101との接続時に、カメラ制御部119又はメモリ134に転送され、記憶される。また、カメラボディ101に撮影レンズ102が装着されたときに、光学系駆動部106により各レンズ要素を駆動して、その駆動時間を測定し、その測定時間からバッファリング期間を決定しても良い。カメラボディ101内の例えばメモリ134に撮影レンズ102の種類毎の上記データテーブルを格納し、装着された撮影レンズの種類を判別して、適用すべきデータテーブルを決定するようしてもよい。
【0048】
レンズ制御部107は、カメラ制御部119からの絞り駆動命令に従い、時刻T2に絞り駆動部106cに絞りを駆動させる。絞り駆動命令発生(時刻T1)から絞り駆動開始(時刻T2)の間には、タイムラグが生じる。時刻T2に絞り駆動部106cが絞りを駆動し、これにより、駆動雑音が発生する。
【0049】
時刻T3において、絞り駆動部106cの駆動電圧が低下し、絞り駆動動作が終了する。しかし、絞り駆動で発生する駆動雑音には残響音があり、時刻T4まで継続する。そこで、残響音時間も加味したT1〜T5の一定時間長についてバッファリングと周波数解析を行う。これにより、レンズ駆動命令から実際の駆動開始までのタイムラグ、及び、駆動雑音の残響時間を含むT2〜T4の正確な駆動雑音発生期間を決定でき、精度の高い雑音除去処理が可能になる。
【0050】
図6を参照して、本実施例で用いる雑音除去処理を説明する。本実施例の雑音除去処理では、駆動雑音発生期間の前後の音声信号を用いて、駆動雑音発生期間内の音声信号を予測する予測処理を行う。図6は、各処理手順における音声信号波形を示す。横軸は時間を示し、縦軸は信号レベルを示す。図6(a)は、被写体からの音声信号に絞り駆動雑音が混入している音声信号を示す。図6(b)は、雑音除去処理のための予測処理を行う途中の段階の音声信号を示す。図6(c)は、図6(a)に示す音声信号に予測処理を適用した後の音声信号を示す。
【0051】
予測処理では、図6(b)に示すように、雑音除去処理区間の音声信号、すなわち、駆動雑音が混入している音声信号を破棄する。学習動作と予測動作を行い、予測動作により求めた信号で、雑音除去処理区間の音声信号を補間する。
【0052】
本実施例の音声予測は、線形予測係数の導出(学習動作)と、線形予測係数を用いた信号予測(予測動作)とからなり、これらの動作を以下、説明する。
【0053】
線形予測を用いるにあたり、現在の信号とこれに隣接する有限個(ここではp個とおく)の標本値との間に、次のような線形1次結合関係を仮定する。すなわち、
【数1】
但し、式(1)において、εtは、平均値0、分散σ2の互いに無相関な確率変数である。
【0054】
ここでxtが過去の値から予測されるように式を変形すると、
【数2】
となる。
【0055】
式(2)によると、εtが十分に小さければ、近傍p個の線形和によって現在の値が表現される。xtを上記の予測によって求めた後、さらにその近似が十分によければ、xt+1も同じく近傍p個の線形和によって求められる。
【0056】
このように、εtを十分に小さくすることが出来れば、順次値を予測して信号を求めることが出来る。そこで、εtを最小にするようなαiを求めることを考える。本実施例では、εtを最小にするようなαiを求める動作を学習動作と呼ぶ。
【0057】
前述した学習区間において、Σεt2を最小化すればよい。学習の開始時間をt0、終了時間t1とすると、
【数3】
ただし、α0=1である。ここで、式(3)を簡単化するために、
【数4】
とおく。式(3)を最小化するようにαiを決めるためには、式(3)のαjを(j=1,2,・・・,p)に関する偏微分を0として解けばよい。この結果、
【数5】
が得られる。式(5)は、p個の線形連立1次方程式を解けば、αiを決定できることを示している。式(5)のcijは、xt−i(i=1,2,・・・,p)から求めることができる。
【0058】
式(5)に従ってαiを決定した場合、Σεt2は最小化されている。このとき、式(2)から、xtの値は、
【数6】
と近似できる。この近似が十分に良いものであれば、xtの代わりに、式(6)の右辺を予測信号として用いることができる。
【0059】
さらに、xt+1についても同様に、近傍のp−1個と、予測によって求めた信号とから近似値を得ることが出来る。
【0060】
このような処理を順次、繰り返すことで、予測区間の信号を生成出来る。本実施例では、求められたαiから予測区間の近似を求める動作を予測動作と呼ぶ。
【0061】
図6に示す波形例での、学習動作と予測動作を説明する。図6に示すように、学習動作を行うに当たっては、予測区間の前後の信号を用いる。これは、音声信号が、極く短時間の領域に着目すると、比較的繰り返し性が高いという性質を利用している。図6に示すように、駆動雑音が存在する区間より時間的に先行して繋がる区間を学習区間1とし、駆動雑音が存在する区間よりも時間的に遅れて繋がる区間を学習区間2とする。
【0062】
学習動作および予測動作では、学習区間1と学習区間2の信号に対して夫々独立に計算を行う。学習区間1で学習動作を行った後に予測区間の信号を生成することを、前方からの予測、略して前方予測と呼ぶ。他方、学習区間2で学習動作を行った後に予測区間の信号を生成することを、後方からの予測、略して後方予測と呼ぶ。予測区間の信号の計算では、学習区間1に近いほど前方予測による値の重みを大きくし、学習区間2に近いほど後方予測による値の重みを大きくするように、前方予測と後方予測を重み付けする。
【0063】
以上、説明したように、駆動信号に基づいて一定期間を周波数解析することにより、雑音除去処理区間を決定することで、常時、周波数解析を行わなくても良くなり、演算負荷が軽減される。また、別途、雑音検出手段を設ける必要がないので、コストダウン、筐体構造の簡単化及び省電力化が図ることができる。正確に駆動雑音発生区間を検出できるので、雑音除去処理性能が向上する。特に、予測処理による雑音除去処理において、駆動雑音区間を正確に決定できることにより、予測精度の向上が見込まれる。
【0064】
絞り駆動音に対する駆動雑音除去処理を説明したが、その他の光学要素による駆動雑音の除去にも適用可能である。一般的には、駆動雑音または雑音の発生タイミングが操作釦やカメラ制御部で検知できるものについても、適用可能である。例えば、焦点レンズ駆動、振れ補正レンズ駆動、不図示の振れ補正レンズのロック機構の駆動、撮像素子シフト式振れ補正駆動、電動ズームレンズ駆動、及び撮像素子のウォブリング駆動等がある。更には、操作音を発生する操作釦の操作及びストロボのポップアップ駆動などがある。
【0065】
雑音除去処理手法として駆動雑音発生区間の前後の音声信号から駆動雑音発生区間の音声信号を予測して再現する予測処理を説明したが、他の方法も利用可能である。例えば、駆動雑音発生区間の信号を0にして無音にしてしまうミュート手段や、周波数領域に変換して特徴周波数の差分を行うスペクトルサブトラクション法などを利用できる。ミュート手段では、雑音除去区間の音声信号を単純に0にしてしまうだけなので、演算処理負荷が非常に軽い。また、ミュートによる無音区間が短いほうが、聴音時に違和感は少なくなるので、本発明で提案するように雑音発生区間を出来るだけ正確に求めることは有効である。スペクトルサブトラクション法では、予め駆動雑音のみを録音し周波数領域に変換した情報を記録しておき、駆動雑音が混入した被写体音信号の周波数領域情報から、駆動雑音のみの周波数領域情報を差し引いて雑音除去を行う。ハムノイズ等の定常的な雑音除去に対しては処理を行いやすいが、絞りの駆動雑音のような突発的な雑音除去については、実際の駆動雑音混入区間に対して駆動雑音のみの周波数領域情報から差し引く位置が時間方向にずれると、雑音除去の性能が低下する。よって、本発明で提案するように雑音発生区間を出来るだけ正確に求めることは、雑音除去手法としてスペクトルサブトラクション法を用いる場合においても有効である。
【実施例2】
【0066】
上記実施例では、音声取り込み時に駆動雑音を除去したが、事後的に駆動雑音を除去しても良い。具体的には、駆動雑音が混入した音声信号と共に、駆動雑音の発生タイミングを示す信号を記録し、これらの両方を駆動雑音除去装置に転送して、駆動雑音を除去させる。もちろん、駆動雑音の特性を示すデータも同時に記録し、駆動雑音除去装置に転送しても良い。駆動雑音の特性を示すデータには、駆動雑音の種類、駆動雑音期間判定の閾値、及び駆動雑音の継続時間等がある。
【0067】
図9は、デジタル一眼レフカメラと、駆動雑音除去装置としての外部演算処理装置からなるシステムの概略構成図である。デジタル一眼レフカメラ100aは、通信ケーブル151を介して外部演算処理装置170に接続する。図10は、図9に示すシステム構成の概略構成ブロック図を示す。カメラ100aは、カメラボディ101aに外部装置との接続用の通信コネクタ141を有している。通信コネクタ141は、通信ケーブル151を介して外部演算処理装置170の通信コネクタ174と電気的に接続する。実施例1と同じ機能の要素には、同じ符号を付してある。
【0068】
外部演算処理装置170は、制御部171、音声信号処理回路172、メモリ173、操作入力部175、音声再生装置176及び画像表示装置177を有する。
【0069】
制御部171は、操作者による操作入力部175の操作に従い、雑音除去処理を含む動作に各部を制御する。雑音除去処理の経過を含む制御結果は、音声再生装置176及び画像表示装置177に出力される。
【0070】
雑音除去処理では、制御部171は、通信コネクタ174を介して、カメラ100aから駆動雑音を除去されていない音声信号を含む動画記録データと、駆動雑音発生タイミングを示す信号とを受信する。音声信号処理回路172は、カメラ100aからの駆動雑音を含む音声信号に、実施例1と同様の雑音除去処理を施してメモリ173に記録する。
【0071】
図11は、外部演算処理装置170における駆動雑音低減処理のフローチャートを示す。操作者が操作入力部175により雑音除去処理の開始を制御部171に指示すると、図11に示すフローチャートが開始される。
【0072】
外部演算処理装置170は、通信ケーブル151を介して、カメラボディ101aのメモリ134に記録された駆動雑音が混入した音声信号及び駆動タイミング信号を含む動画記録データを読み込む(S2001)。
【0073】
制御部171は、読み込んだ音声信号に同期した駆動信号タイミングが存在しているか否かを判断する(S2002)。音声信号に同期した駆動タイミング信号が検出されない場合(S2002)、制御部171は、音声信号をそのまま記録する(S2010)。そして、制御部171は、処理対象の音声信号が終了しているかどうかを調べる(S2009)。音声信号が終了していない場合(S2009)、制御部171は、ステップS2001に戻り、引き続き音声信号のカメラ100aからの読み込みを続ける。音声信号が終了していると(S2009)、制御部171は、駆動雑音除去処理を終了する。
【0074】
音声信号に同期した駆動タイミング信号が存在する場合(S2002)、駆動タイミング信号から一定時間の音声信号をバッファリングする(S2003)。以後のステップS2004〜S2007は、音声信号処理回路172が雑音除去処理を行うことを除いて、その処理内容が図3のステップS1004〜S1007と同様であるので、詳細な説明を省略する。
【0075】
音声信号処理回路172は、雑音除去処理を施した音声信号をメモリ173に記録する(S2008)。制御部171は、処理対象の音声信号が終了しているかどうかを調べる(S2009)。音声信号が終了していない場合(S2009)、制御部171は、ステップS2001に戻り、引き続き音声信号のカメラ100aからの読み込みを続ける。音声信号が終了していると(S2009)、制御部171は、駆動雑音除去処理を終了する。
【0076】
雑音除去処理を施された音声信号は、カメラ100aからの動画データに含まれる画像データと同期して、メモリ173に記録される。雑音除去処理を施した音声信号をカメラ100aのメモリ134に書き戻して、メモリ134の駆動雑音を含む音声信号に上書きしてもよい。
【0077】
メモリ134がカメラボディ101aから取り外し可能な場合には、図12に示すように、メモリカードリーダ152で外部演算処理装置に必要なデータを転送してもよい。
【特許請求の範囲】
【請求項1】
被写体像を結像する撮像光学系と、
前記撮像光学系から導かれる被写体像を撮像する撮像素子と、
前記撮像光学系の光学要素を変化させる光学系駆動手段と、
前記光学系駆動手段を駆動命令により制御する制御手段と、
音声信号を取得する音声入力手段と、
前記駆動命令からの所定の解析区間にある雑音除去区間であって、前記音声入力手段の出力に含まれる、前記光学系駆動手段の駆動雑音の特徴周波数の成分から雑音除去区間を決定する決定手段と、
前記音声入力手段の出力から前記雑音除去区間の雑音を除去する音声信号処理手段と、
前記音声信号処理手段の出力信号を記録する記録手段
とを具備することを特徴とする撮像装置。
【請求項2】
前記音声信号処理手段が、前記雑音除去区間の音声信号を前記雑音除去区間の前後の音声信号から線形予測することにより前記雑音を除去することを特徴とする請求項1に記載の撮像装置。
【請求項3】
前記記録手段が、前記駆動命令のタイミングを示す駆動タイミング信号と、前記音声入力手段の出力音声信号を同期して記録することを特徴とする請求項1に記載の撮像装置。
【請求項4】
前記解析区間が、前記光学系駆動手段により変化する前記光学要素の種類毎に応じて決定されることを特徴とする請求項1に記載の撮像装置。
【請求項5】
更に、前記撮像光学系の前記光学要素を前記光学系駆動手段に予め変化させて、前記解析区間を決定する手段を有することを特徴とする請求項4に記載の撮像装置。
【請求項6】
前記決定手段が、
前記駆動命令からの所定の解析区間の間で、前記音声入力手段の出力に含まれる、前記光学系駆動手段の駆動雑音の特徴周波数の成分を抽出する抽出手段と、
前記特徴周波数の成分のレベルが閾値を越える区間を前記雑音除去区間と決定する手段
とを具備することを特徴とする請求項1乃至5の何れか1項に記載の撮像装置。
【請求項7】
前記閾値が、前記撮像光学系の種類に応じて異なることを特徴とする請求項6に記載の撮像装置。
【請求項8】
駆動手段による駆動で発生する駆動雑音が混入する音声信号から前記駆動雑音を低減する駆動雑音除去装置であって、
前記音声信号、及び、前記音声信号に同期する、前記駆動手段の駆動タイミングを示す駆動タイミング信号を取り込む手段と、
前記駆動タイミング信号からの所定の解析区間にある雑音除去区間であって、前記音声信号に含まれる前記駆動雑音の特徴周波数の成分から雑音除去区間を決定する決定手段と、
前記音声信号から前記雑音除去区間の前記駆動雑音を除去する音声信号処理手段
とを具備することを特徴とする駆動雑音除去装置。
【請求項1】
被写体像を結像する撮像光学系と、
前記撮像光学系から導かれる被写体像を撮像する撮像素子と、
前記撮像光学系の光学要素を変化させる光学系駆動手段と、
前記光学系駆動手段を駆動命令により制御する制御手段と、
音声信号を取得する音声入力手段と、
前記駆動命令からの所定の解析区間にある雑音除去区間であって、前記音声入力手段の出力に含まれる、前記光学系駆動手段の駆動雑音の特徴周波数の成分から雑音除去区間を決定する決定手段と、
前記音声入力手段の出力から前記雑音除去区間の雑音を除去する音声信号処理手段と、
前記音声信号処理手段の出力信号を記録する記録手段
とを具備することを特徴とする撮像装置。
【請求項2】
前記音声信号処理手段が、前記雑音除去区間の音声信号を前記雑音除去区間の前後の音声信号から線形予測することにより前記雑音を除去することを特徴とする請求項1に記載の撮像装置。
【請求項3】
前記記録手段が、前記駆動命令のタイミングを示す駆動タイミング信号と、前記音声入力手段の出力音声信号を同期して記録することを特徴とする請求項1に記載の撮像装置。
【請求項4】
前記解析区間が、前記光学系駆動手段により変化する前記光学要素の種類毎に応じて決定されることを特徴とする請求項1に記載の撮像装置。
【請求項5】
更に、前記撮像光学系の前記光学要素を前記光学系駆動手段に予め変化させて、前記解析区間を決定する手段を有することを特徴とする請求項4に記載の撮像装置。
【請求項6】
前記決定手段が、
前記駆動命令からの所定の解析区間の間で、前記音声入力手段の出力に含まれる、前記光学系駆動手段の駆動雑音の特徴周波数の成分を抽出する抽出手段と、
前記特徴周波数の成分のレベルが閾値を越える区間を前記雑音除去区間と決定する手段
とを具備することを特徴とする請求項1乃至5の何れか1項に記載の撮像装置。
【請求項7】
前記閾値が、前記撮像光学系の種類に応じて異なることを特徴とする請求項6に記載の撮像装置。
【請求項8】
駆動手段による駆動で発生する駆動雑音が混入する音声信号から前記駆動雑音を低減する駆動雑音除去装置であって、
前記音声信号、及び、前記音声信号に同期する、前記駆動手段の駆動タイミングを示す駆動タイミング信号を取り込む手段と、
前記駆動タイミング信号からの所定の解析区間にある雑音除去区間であって、前記音声信号に含まれる前記駆動雑音の特徴周波数の成分から雑音除去区間を決定する決定手段と、
前記音声信号から前記雑音除去区間の前記駆動雑音を除去する音声信号処理手段
とを具備することを特徴とする駆動雑音除去装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2012−114842(P2012−114842A)
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願番号】特願2010−264119(P2010−264119)
【出願日】平成22年11月26日(2010.11.26)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願日】平成22年11月26日(2010.11.26)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]