
撮像装置
【課題】MRIとMPI/MPHとを簡易な構成により実現する。
【解決手段】静磁場コイルユニット11および静磁場電源12は、静磁場を発生する。傾斜磁場コイルユニット13および傾斜磁場電源14は、静磁場に傾斜磁場を重畳する。RFコイルユニット19および送信機20は、静磁場中に配置された被検体200に印加する第1の高周波磁場を発生する。RFコイルユニット19および受信機21は、被検体200から放射される磁気共鳴信号を受信する。演算ユニット26は、受信された磁気共鳴信号に基づいて被検体200に関する画像を再構成する。反発磁場コイルユニット15および反発磁場電源16は、静磁場磁石からの漏洩磁場を相殺してゼロ磁場領域を形成する反発磁場を発生する。RFコイルユニット19およびレコーディングコイル駆動部22は、ゼロ磁場領域に配置された被検体200に印加する第2の高周波磁場を発生する。
【解決手段】静磁場コイルユニット11および静磁場電源12は、静磁場を発生する。傾斜磁場コイルユニット13および傾斜磁場電源14は、静磁場に傾斜磁場を重畳する。RFコイルユニット19および送信機20は、静磁場中に配置された被検体200に印加する第1の高周波磁場を発生する。RFコイルユニット19および受信機21は、被検体200から放射される磁気共鳴信号を受信する。演算ユニット26は、受信された磁気共鳴信号に基づいて被検体200に関する画像を再構成する。反発磁場コイルユニット15および反発磁場電源16は、静磁場磁石からの漏洩磁場を相殺してゼロ磁場領域を形成する反発磁場を発生する。RFコイルユニット19およびレコーディングコイル駆動部22は、ゼロ磁場領域に配置された被検体200に印加する第2の高周波磁場を発生する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、磁気共鳴イメージング(magnetic resonance imaging:MRI)と磁性微粒子イメージング(magnetic particle imaging:MPI)および/または磁性微粒子温熱療法(magnetic particle hyperthermia:MPH)とを行う機能を兼ね備えた撮像装置に関する。
【背景技術】
【0002】
Philips社により、MPI(magnetic particle imaging)と呼ばれるイメージング装置のコンセプトが提案された(非特許文献1および非特許文献2を参照)。この装置の原理を以下に説明する。
【0003】
図19はMPI装置の原理的な構成を示す図である。
【0004】
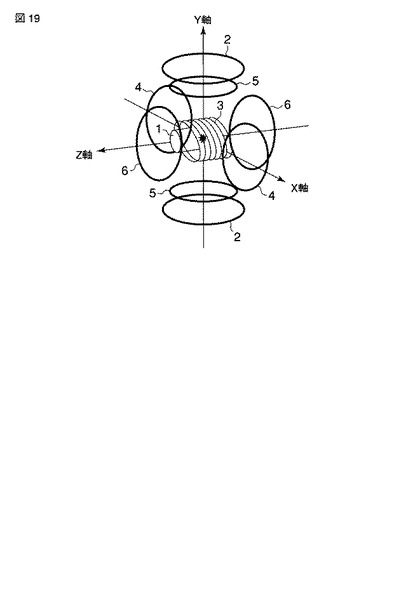
いま、磁性微粒子(以下、磁性ナノ粒子と称する)を分散させ、かつ支持体がゲルに磁性ナノ粒子が分散・固定されたファントム1があると仮定する。一対のセレクション・フィールドコイル(selection field coil)2のそれぞれから出る磁力線が互いに向かい合うように静磁場を発生させると、その中心に、磁場強度がある閾値以下となるゼロ磁場領域(field-free field)が生じる。このような不均一磁場内に上記ファントム1を置き、これにレコーディングコイル(recording coil)3を使って、適切な振幅を有し、かつ高調波を含まない高周波磁界を印加する。そうすると、ゼロ磁場領域にある磁性ナノ粒子は、磁気未飽和と磁気飽和の状態を行き来するため、レコーディングコイル3を駆動する駆動アンプから見ると電気的に非線形なインピーダンスを有する負荷を駆動したのと等価になる。そのため出力波形(電圧駆動の場合は出力電流波形、電流駆動の場合は出力電圧波形)には高調波が発生する。これは、例えばトランスが飽和した際の励磁電流の波形に類似している。一方、磁気飽和している領域、すなわちゼロ磁場領域以外の領域にある磁性ナノ粒子に対しては、無負荷を駆動したのと等価になるため、高調波が殆ど含まれない出力波形が観測されることになる。そこで、高調波成分の含有量はゼロ磁場領域に存在する磁性ナノ粒子の分量に比例するものと考えられる。ファントム1に対するゼロ磁場領域の位置をシフトさせながら様々な位置で得られる出力波形における高周波成分の含有量をそれぞれ測定して、各位置における画素の輝度値を測定した含有量に応じた値とすることによって、磁性ナノ粒子の分布量を表す画像が得られる。
【0005】
ファントム1に対するゼロ磁場領域のシフトは、X、Y、Z軸方向にオフセット均一磁場を発生させるドライビングフィールドコイル(driving field coil)を使ってゼロ磁場領域を電気的に3次元走査する方法や、ファントムを載せたステージを機械的に移動させて3次元走査する方法により実現される。なおドライビングフィールドコイルは、例えば図19に示すような一対のXコイル4、一対のYコイル5および一対のZコイル6を含んで構成される。
【0006】
以上がMPIの基本原理である。
【0007】
非特許文献1ではさらに、レコーディングコイル3に印加する高周波電力を大きくすれば、ヒステリシス損、ブラウン緩和、ネール緩和などに起因する磁性ナノ粒子の発熱現象を利用してゼロ磁場領域にある磁性ナノ粒子を発熱させ、それ以外の領域にある磁性ナノ粒子は殆ど発熱させずに済むことが示唆されている。すなわち、従来のハイパーサーミアでは実現困難であった、ピンポイントでの選択的な加温制御が可能となるという可能性についての示唆も与えている。
【0008】
しかしながら、静注されたMRI造影剤(例えば、日本シェーリング株式会社製のResovist(登録商標))の体内濃度から推定されるMPIによるS/Nは、MRI装置のS/Nより2桁オーダ高くなると見積もられており、磁性ナノ粒子の分布しか検出できないという制約があるものの高感度な撮像方法として期待されている。
【0009】
一方、別のイメージング法として、磁気共鳴イメージング法(以下、MRIと称する)は広く知られている。
【0010】
現在最も一般的なMRI装置は、1.5T超電導マグネットを使った横置き円筒型のもので、3Tのものも徐々に普及しつつある。MPIではゼロ磁場を発生させることが不可欠で、その大きさ(分解能に対応)を所望のサイズ内におさめることが重要である。そのゼロ磁場領域は「磁性ナノ粒子の磁化がその材質の飽和磁束密度を真空の透磁率で割った値以下となる外部磁場の空間」と定義できる。このため、磁性ナノ粒子が高透磁率であってそれに磁束飽和を起させる外部磁場が低ければ低いほど、強力な超電導磁石で発生させた静磁場勾配が大きければ大きいほど、ゼロ磁場領域を小さくでき、結果的に空間分解能を高くすることができる。現在の技術を応用することで、MPIで必要とされる1mm以下オーダーの分解能を実現するために必要な磁性ナノ粒子、超電導磁石も現在の技術の範囲内で十分実現可能である。
【非特許文献1】Bernhard Gleich、Juergen Weizenecker、“Tomographic imaging using the nonlinear response of magnetic particles” Nature Letters Vol.435, 2005年6月30日、P.1214−1217
【非特許文献2】B.Gleich、J.Borgert、J.Weizenecker、“Magnetic Particle Imaging (MPI)”、MEDICAMUNDI 50/1、2006年5月、P.66−71
【発明の開示】
【発明が解決しようとする課題】
【0011】
MPIでは、磁性ナノ粒子の存在分布を定量的に検出することしかできず、人体などの被検体の形態画像を撮像することはできない。このため臨床的には、MRI、X線CT、超音波撮像などの既存のイメージング技術と組み合わせて用いる必要がある。すなわち、既存の撮像装置とMPI装置および/またはMPH装置とを融合した撮像装置が望まれると考えられる。
【0012】
しかしながら、既存のイメージング装置とMPI装置および/またはMPH装置とを全く個別に構成して融合したのでは、得られる撮像装置は大掛かりな構成になってしまうことは明らかである。
【0013】
本発明はこのような事情を考慮してなされたものであり、その目的とするところは、磁気共鳴イメージングとMPIおよび/またはMPHとを融合した撮像装置を簡易な構成により実現することにある。
【課題を解決するための手段】
【0014】
本発明の一態様による撮像装置は、静磁場を発生する静磁場磁石と、前記静磁場に傾斜磁場を重畳する傾斜磁場磁石と、前記静磁場中に配置された被検体に印加するための第1の高周波磁場を発生する第1の高周波磁場コイルと、前記被検体から放射される磁気共鳴信号を受信する第1の受信手段と、前記第1の受信手段により受信された前記磁気共鳴信号に基づいて前記被検体に関する画像を再構成する手段と、前記静磁場磁石からの漏洩磁場と局所的に相殺させることによりゼロ磁場領域を形成するための反発磁場を発生する反発磁場磁石と、前記ゼロ磁場領域に移動された前記被検体に印加するための第2の高周波磁場を発生する第2の高周波磁場コイルとを備える。
【発明の効果】
【0015】
本発明によれば、磁気共鳴イメージングとMPIおよび/またはMPHとを簡易な構成により実現する撮像装置を提供できる。
【発明を実施するための最良の形態】
【0016】
以下、図面を参照して本発明の一実施形態について説明する。
【0017】
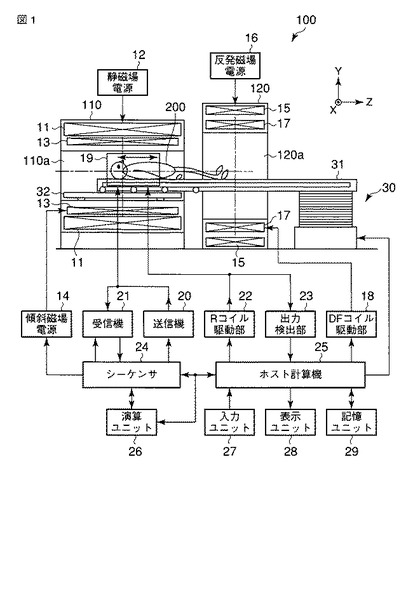
図1は本実施形態に係る撮像装置100の構成を示す図である。なお図1においては一部を簡略化して、あるいは破断して示している。
【0018】
この撮像装置100は、静磁場発生部、傾斜磁場発生部、反発磁場発生部、ドライブ磁場発生部、高周波送受信部および制御・演算部を備えている。そしてこの撮像装置100は構成要素として、静磁場コイルユニット11、静磁場電源12、傾斜磁場コイルユニット13および傾斜磁場電源14からなるMRI装置の部分と、反発磁場コイルユニット15、反発磁場電源16、ドライブ磁場(ドライビングフィールド)コイルユニット17、ドライブ磁場コイル駆動部(DFコイル駆動部)18、高周波コイルユニット19、送信機20、受信機21、レコーディングコイル駆動部22、出力検出部23、シーケンサ24、ホスト計算機25、演算ユニット26、記憶ユニット27、表示器28、入力器29、基台部30、天板31およびガイドレール32からなるMPI装置および/またはMPH装置の部分とから構成される。
【0019】
さらにこの撮像装置100は、上記の構成要素の一部を収容するためにMRガントリ110およびMPガントリ120を備える。MRガントリ110およびMPガントリ120は、それぞれ空間110a,120aを有している。空間110a,120aは、いずれもZ軸方向の両端が開口されている。MRガントリ110およびMPガントリ120は、空間110a,120aがZ軸方向、すなわち静磁場方向に直列に並ぶように配置される。MRガントリ110およびMPガントリ120は、互いの間に間隙を形成するように離間して配置されている。空間120aは、空間110aよりも開口面積が大きい。ただし、MRガントリ110およびMPガントリ120は、間隙をほとんど形成しないように配置されていても良いし、互いに接合されていても良い。また空間110aは、MPガントリ120からの遠端においては必ずしも開口している必要はない。
【0020】
静磁場発生部は、静磁場コイルユニット11および静磁場電源12を含む。静磁場コイルユニット11は、MRガントリ110に収容されている。静磁場コイルユニット11は、空間110aの周囲にリング状に配置された静磁場コイルを少なくとも1つ含む。この静磁場コイルとしては、例えば超電導コイルまたは常電導コイルが使用される。この超電導コイルが用いられる場合に静磁場コイルユニット11には、静磁場コイルを冷却するための冷却機構などが含まれ、図示しない冷却機によって静磁場コイルを超電導状態に保つ。静磁場電源12は、静磁場コイルユニット11を励磁もしくは減磁する場合にだけ電流を供給する。かくして静磁場発生部は、空間110aの中に静磁場B0を発生する。この静磁場B0の磁場方向は、Z軸方向にほぼ一致する。なお、静磁場発生部には、さらにシムコイルおよびシム電源や鉄シムが設けられ、静磁場の均一性の補正が図られることがある。
【0021】
傾斜磁場発生部は、傾斜磁場コイルユニット13および傾斜磁場電源14を含む。傾斜磁場コイルユニット13は、MRガントリ110に収容されている。傾斜磁場コイルユニット13は、空間110aと静磁場コイルユニット11との間に配置された3組の傾斜磁場コイルを備える。3組の傾斜磁場コイルは、互いに直交するX軸方向、Y軸方向およびZ軸方向のそれぞれの傾斜磁場を発生させる。傾斜磁場電源14は、シーケンサ24の制御のもとで、3組の傾斜磁場コイルに傾斜磁場を発生させるためのパルス電流をそれぞれ供給する。かくして傾斜磁場発生部は、傾斜磁場電源14から3組の傾斜磁場コイルのそれぞれに供給するパルス電流を制御することにより、物理軸である3軸(X軸,Y軸,Z軸)方向の傾斜磁場を合成して、互いに直交するスライス方向傾斜磁場Gss、位相エンコード方向傾斜磁場Gpe、および読出し方向(周波数エンコード方向)傾斜磁場Groからなる各論理軸方向のそれぞれの傾斜磁場を任意に設定する。スライス方向、位相エンコード方向および読出し方向の各傾斜磁場Gss,Gpe,Groは、静磁場B0に重畳される。
【0022】
反発磁場発生部は、反発磁場コイルユニット15および反発磁場電源16を含む。反発磁場コイルユニット15は、MPガントリ120に収容されている。反発磁場コイルユニット15は、空間120aの周囲にリング状に配置された反発磁場コイルを少なくとも1つ含む。この反発磁場コイルとしては、例えば超電導コイルまたは常電導コイルが使用される。この超電導コイルが用いられる場合に反発磁場コイルユニット15には、反発磁場コイルを冷却するための冷却機構などが含まれ、図示しない冷却機によって反発磁場コイルを超電導状態に保つ。反発磁場電源16は、反発磁場コイルユニット15に電流を供給する。かくして反発磁場発生部は、空間120aの中およびその近傍に静磁場を発生させる。この静磁場の磁場方向は、MRガントリ110の外部に及んだ漏洩磁場の磁力線と向かい合う方向である。かくして、反発磁場発生部で発生される静磁場は、MRガントリ110からの漏洩磁場に反発するから、これを反発磁場と称する。
【0023】
ドライブ磁場発生部は、ドライブ磁場コイルユニット17およびドライブ磁場コイル駆動部18を含む。ドライブ磁場コイルユニット17は、MPガントリ120に収容されている。ドライブ磁場コイルユニット17は、図19に示した一対のXコイル4、一対のYコイル5および一対のZコイル6にそれぞれ相当するコイルを含む。これらのコイルは、空間120aの周囲に配置されている。ドライブ磁場コイル駆動部18は、ドライブ磁場コイルユニット17に含まれる各コイルに適宜に電流を供給する。かくしてドライブ磁場発生部は、ドライブ磁場コイル駆動部18からの供給電流を制御することにより、ゼロ磁場領域の位置をシフトさせるための任意のオフセット磁場(ドライブ磁場)を空間120aおよびその周辺に発生する。
【0024】
高周波送受信部は、高周波コイルユニット19、送信機20、受信機21、レコーディングコイル駆動部22および出力検出部23を含む。高周波コイルユニット19は、被検体200の近傍に配置される。高周波コイルユニット19は、少なくとも1つの高周波コイルを含む。送信機20および受信機21は、シーケンサ24の制御の下で動作する。送信機20は、核磁気共鳴(NMR)を起こさせるためのラーモア周波数のRF電流パルスを高周波コイルユニット19に供給する。受信機21は、高周波コイルユニット19が受信したエコー信号などのMR信号を取り込み、これに前置増幅、中間周波変換、位相検波、低周波増幅、あるいはフィルタリングなどの各種の信号処理を施した後、A/D変換してエコー信号に応じたデジタル量のエコーデータ(原データ)を生成する。レコーディングコイル駆動部22および出力検出部23は、ホスト計算機25の制御の下で動作する。レコーディングコイル駆動部22は、適切な振幅を有し、かつ高調波を含まない高周波電流を高周波コイルユニット19に供給する。出力検出部23は、レコーディングコイル駆動部22の出力電力の変化を検出する。また出力検出部23は、出力電力の変化に含まれる高調波信号をフーリエ変換する。
【0025】
制御・演算部は、シーケンサ24、ホスト計算機25、演算ユニット26、記憶ユニット27、表示器28および入力器29を含む。
【0026】
シーケンサ24は、CPUおよびメモリを備えている。シーケンサ24は、ホスト計算機25から送られてきたパルスシーケンス情報をメモリに記憶する。シーケンサ24のCPUは、メモリに記憶したシーケンス情報にしたがって、傾斜磁場電源14、送信機20および受信機21の動作を制御するとともに、受信機21が出力したエコーデータを一旦入力し、これを演算ユニット26に転送する。ここで、シーケンス情報とは、一連のパルスシーケンスにしたがって傾斜磁場電源14、送信機20および受信機21を動作させるために必要な全ての情報であり、例えば3組の傾斜磁場コイルに印加するパルス電流の強度、印加時間および印加タイミングなどに関する情報を含む。
【0027】
ホスト計算機25は、予め定められたソフトウエア手順を実行することにより実現される各種の機能を有している。この機能の1つは、シーケンサ24にパルスシーケンス情報を指令するとともに、装置全体の動作を統括する。上記の機能の1つは、高周波コイルユニット19がMRガントリ110内にあるときのみ使われる送信機20および受信機21と、高周波コイルユニット19がMPガントリ120内にあるときのみ使われるレコーディングコイル駆動部22および出力検出部23とが同時に動作しないように動作モードに応じて制御する。具体的にはホスト計算機25は、MRIモード時には送信機20および受信機21を動作させ、MPIモード時およびMPHモード時にはレコーディングコイル駆動部22および出力検出部23を動作させる。上記の機能の1つは、MPIモード時とMPHモード時とでレコーディングコイル駆動部22が出力する高周波電流の振幅や周波数を変更させる。
【0028】
演算ユニット26は、受信機21が出力したエコーデータを、シーケンサ24を通して入力する。演算ユニット26は、入力したエコーデータを、内部メモリに設定したフーリエ空間(k空間または周波数空間とも呼ばれる)に配置する。演算ユニット26は、フーリエ空間に配置されたエコーデータを2次元または3次元のフーリエ変換に付して実空間の画像データ(MR画像データ)を再構成する。また演算ユニット26は、必要に応じて、画像に関するデータの合成処理や差分演算処理などを行うことができる。
【0029】
記憶ユニット27は、MR画像データ、MP画像データ、さらには上述の合成処理や差分処理が施された画像データを記憶する。
【0030】
表示器28は、ユーザに提示するべき各種の画像をホスト計算機25の制御の下に表示する。表示器28としては、フラットパネルディスプレイと称される通常の表示デバイスを利用可能である。
【0031】
入力器29は、術者が希望する撮影条件、パルスシーケンス、画像合成や差分演算に関する情報などの各種の情報を入力する。入力器29は、入力した情報をホスト計算機25に送る。入力器29としては、マウスやトラックボールなどのポインティングデバイス、モード切替スイッチ等の選択デバイス、あるいはキーボード等の入力デバイスを適宜に備える。
【0032】
寝台部は、基台部30、天板31およびガイドレール32を含む。基台部30は、天板31を支持する。基台部30は、天板31をX軸、Y軸およびZ軸の各方向にそれぞれ移動させることができる。天板31は、その上面に被検体200が載置される。天板31は、基台部30によってZ軸方向に移動されることで、被検体200を空間110a,120aに送り込んだり、空間110a,120aから抜き出したりする。ガイドレール32は、空間110a内にてMRガントリ110に取り付けられている。ガイドレール32は、空間110a内に送り込まれた天板31を支持するとともに、天板31のZ軸方向への移動を案内する。
【0033】
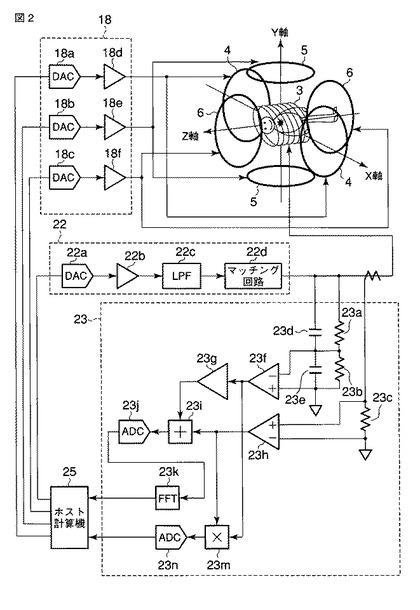
図2は図1中のドライブ磁場コイル駆動部18、レコーディングコイル駆動部22および出力検出部23の具体的な構成例を示す図である。
【0034】
いま、静磁場コイルユニット11の漏洩磁場と反発磁場コイルユニット16の反発磁場とにより、座標原点にゼロ磁場領域が発生しているものとする。ドライブ磁場コイル駆動部18は、ディジタル−アナログ変換器(DAC)18a,18b,18cおよびパワーアンプ18d,18e,18fを含む。DAC18a,18b,18cには、X軸方向、Y軸方向およびZ軸方向についてのオフセット磁場のオフセット量を表すデータがホスト計算機25よりそれぞれ与えられる。DAC18a,18b,18cは、このデータに応じたレベルの電流を出力する。DAC18a,18b,18cから出力された電流は、パワーアンプ18d,18e,18fにそれぞれ入力される。パワーアンプ18d,18e,18fは、入力される電流を、Xコイル4、Yコイル5およびZコイル6により必要な強さのドライブ磁場を発生させるための適切なレベルまで増幅する。そしてパワーアンプ18d,18e,18fの出力電流は、Xコイル4、Yコイル5およびZコイル6にそれぞれ供給される。
【0035】
レコーディングコイル駆動部22は、ディジタル−アナログコンバータ(DAC)22a、パワーアンプ22b、ローパスフィルタ(LPF)22cおよびマッチング回路22dを含む。
【0036】
DAC22aには、レコーディングコイル3に供給するべき電流のレベルを表すデータがホスト計算機25より与えられる。DAC22aは、このデータに応じたレベルの電流を出力する。パワーアンプ22bは、DAC22aが出力する電流を、レコーディングコイル3から適切な振幅を有した高周波磁界を発生させるための適切なレベルまで増幅する。LPF22cは、パワーアンプ22bが出力する電流から高調波成分を除去するために使われる。マッチング回路22dは、パワーアンプ22bの出力インピーダンスとレコーディングコイル3のインピーダンスとを整合させることにより、レコーディングコイル3で消費される有能電力を最大にするために使われる。
【0037】
出力検出部23は、抵抗器23a,23b,23cおよびコンデンサ23d,23eからなる分圧回路、反転プリアンプ23f、可変ゲインアンプ23g、非反転プリアンプ23h、加算回路23i、アナログ−ディジタル変換器(ADC)23j、高速フーリエ変換エンジン(FFT)23k、乗算回路23mおよびアナログ−ディジタル変換器(ADC)23nを含む。
【0038】
マッチング回路22dの出力電圧Voは、抵抗器23a,23bおよびコンデンサ23d,23eにより検出されて反転プリアンプ23fに入力される。反転プリアンプ23fは、電圧Voの極性を反転させるとともに、一定のゲインで増幅する。可変ゲインアンプ23gは、反転プリアンプ23fから出力される電圧を任意のゲインで増幅する。
【0039】
マッチング回路22dの出力電流Ioは、電流検出器から出力される電流信号として検出された後、さらに抵抗器23cにより電圧信号に変換されて、非反転プリアンプ23fに入力される。非反転プリアンプ23fは、電流Ioの極性をそのままで一定のゲインで増幅する。
【0040】
加算回路23iは、可変ゲインアンプ23gから出力される電圧値に非反転プリアンプ23fから出力される電流値を加算する。ただし可変ゲインアンプ23gのゲインは、加算回路23iにおける加算により、非反転プリアンプ23fから出力される電流に含まれる基本波を打ち消すように調整される。これにより加算回路23iの出力としては、マッチング回路22dの出力電流に生じる高調波成分に応じた高調波信号が得られる。ADC23jは、高調波信号をディジタル化する。FFT23kは、高調波信号をフーリエ変換する。フーリエ変換の結果は、ホスト計算機25に与えられる。
【0041】
乗算回路23mは、可変ゲインアンプ23gから出力される電圧値に非反転プリアンプ23fから出力される電流値を乗算する。これにより乗算回路23mの出力としては、マッチング回路22dの出力電力値に応じた出力電力信号が得られる。ADC23nは、出力電力信号をディジタル化する。ディジタル化された出力電力信号は、ホスト計算機25に与えられる。この信号は、レコーディングコイル駆動部23の入力に負帰還され、レコーディングコイル3に印加される電力が常に入力信号に比例するように制御するために利用される。
【0042】
以上が撮像装置100の概略構成である。以下に、この撮像装置100の特徴的な構成について詳細に説明する。
【0043】
[MPIおよびMPHのためのゼロ磁場領域を形成するための構成]
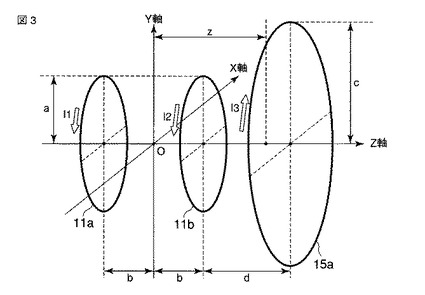
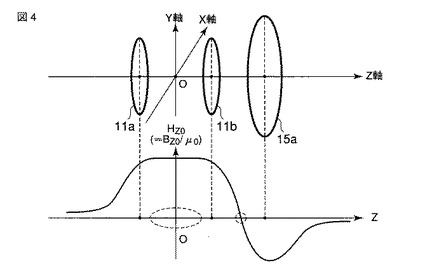
図3は静磁場コイルユニット11と反発磁場コイルユニット15との関係を模式的に示す図である。
【0044】
静磁場コイルユニット11は、均一な静磁場を発生する必要があるため、これを円形コイル11a,11bを対向配置した“ヘルムホルツコイル”で近似する。その円形コイル11a,11bの外側に、反発磁場コイルユニット15に含まれる反発磁場コイルとしての円形コイル15aを配置したモデルを考える。
【0045】
円形コイル11a,11bは、直径が互いに等しく、その半径をaとおく。また円形コイル11a,11bの互いの間隔を半径aと等しくする。円形コイル11a,11bの中心を通るZ軸上における円形コイル11a,11bどうしの中間の地点をOとおく。円形コイル11a,11bのそれぞれの中心と地点Oとの間の距離はbとおく。従って、a=2bである。さらに、円形コイル11a,11bには同じ向きの電流が流され、それらの電流値をI1、I2とおく。ただし、I1=I2である。円形コイル15aは、aよりも大きな半径を持ち、この半径をcとおく。円形コイル11bと円形コイル15aとの間隔をdとおく。円形コイル15aには、円形コイル11a,11bとは逆方向の電流が流され、その電流値をI3とおく。
【0046】
この撮像装置において、MRI装置としての静磁場均一性をできるだけ損なわずに撮影できるように、MRIとMPIまたはMPHとを同時に行わないこととする。すなわちMRI装置で撮影する際には、電流値I3を0[A]に制御する。一方、MPIまたはMPHを行う際には、円形コイル11a,11bにより発生される磁場と円形コイル15aにより発生される反発磁場とにより、所望の磁場勾配を持つゼロ磁場領域を、例えば図4に示すように形成するように電流値I3を制御する。例えば、米国Stereotaxis社のMagnetic Navigation Systemが磁石を先端に取り付けたカテーテルを生体内に牽引するために使用している磁極は、超電導マグネットで構成され、短時間で永久電流値を変化させることができることから、このような円形コイル15aは既存の技術を利用して十分に実現可能である。
【0047】
幾何学的対称性から中心軸上の磁場に関しては解析的に表現でき、Z軸方向の変位をzとしたときのZ軸上の静磁場Z成分H0(z)(=B0(z)/μ0、μ0:真空の透磁率)は次の式(1)のように表される。
【数1】

【0048】
I3=0のとき、円形コイル11aと円形コイル11bとの中間地点Oで均一磁場が発生する条件は、式(1)を級数展開した式においてzに関する1次の項と2次の項の係数とが恒等的に0になるように半径aおよび距離bを定めることに対応する。この場合の半径aおよび距離bの関係は、b=a/2となり、円形コイル11a,11bは“ヘルムホルツコイル”の配置(a=2b)が適していることが分かる。このとき円形コイル11bと円形コイル15aとの間で生じる“ゼロ磁場ポイント”は、次の式(2)=0とおいて数値的に解けば、その位置はz0として求めることができる。
【数2】
【0049】
このときの磁場勾配dH0(z)/dz(=(1/μ0)・∂B0(z)/∂z)は、次の式(3)のように表される。
【数3】
【0050】
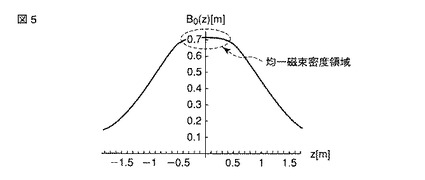
例えばa=1、b=0.5、c=1.5、d=0.5[m]、I1=0.7958×106[A・turn](=I2)、I3=0[A・turn]としたとき、すなわちMRI装置で撮影する行う場合のB0(z)の分布を図5に示す。図5からは、z=0[m]の近傍は均一な磁場(=0.7T・μ0-1)が発生しており、かつその周辺にゼロ磁場領域は生じないことが分かる。ここでμ0は真空の透磁率を表すものとする。
【0051】
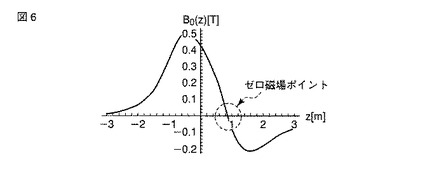
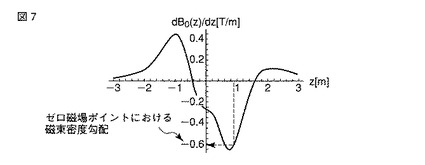
次にa=1、b=0.5、c=1.5、d=0.5[m]、I1=0.7958×106[A・turn](=I2)、I3=1.1937×106[A・turn]としたとき、すなわちイメージング手段として高い空間分解能が要求されるMPIを行う場合のB0(z)の分布を図6に示す。図6からは、z=0.9[m]にゼロ磁場領域(ゼロクロスする点の近傍)が生じることが分かる。このときの磁場勾配分布∂B0(z)/∂zは図7に示すようになる。図7からは、ゼロ磁場ポイントでの磁場勾配は0.625T・μ0-1/mとなることが分かる。
【0052】
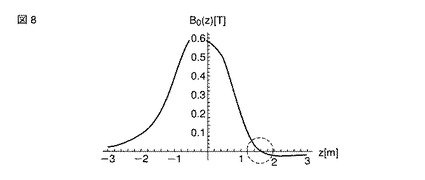
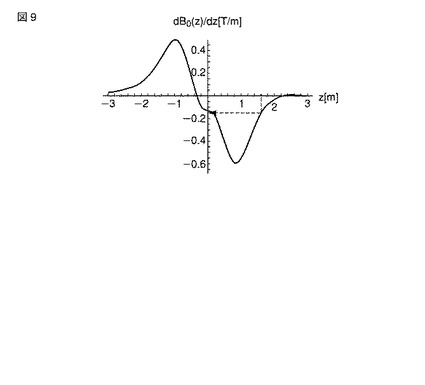
更に条件を変えて、a=1、b=0.5、c=1.5、d=0.5[m]、I1=0.7958×106[A・turn](=I2)、I3=0.55706×106[A・turn]としたとき、すなわち加温治療のためにそれほど高い空間分解能が要求されないMPHを行う場合のB0(z)の分布を図8に示す。図8からは、z=1.6[m]にゼロ磁場領域が生じることが分かる。このときの磁場勾配分布∂B0(z)/∂zは図9に示すようになる。図9からは、ゼロ磁場ポイントでの磁場勾配は0.15T・μ0-1/mとなることが分かる。
【0053】
磁性ナノ粒子(フェリ磁性)は10〜数10[nm]オーダの直径に調整されているため磁区構造を取ることができず、単磁区粒子と呼ばれている。そのため巨視的にはヒステリシス特性を殆ど持たず、超常磁性を示すことが知られている。超常磁性MRI造影剤として市販されているResovist(登録商標)などでは、デキストラン等の高分子を使って表面をコーティングする処理が行われている。これにより凝集の回避、生体安全性を図っている。この造影剤は静注や穿刺の手段により患部に導入され、腫瘍組織にできた粗雑な新生血管に見られるEPR(enhanced permeation and retention)効果によって効率よく取り込まれる。Resovist(登録商標)の粒子径は平均30[nm]程度である。非特許文献1によれば、この大きさの磁性ナノ粒子を磁気飽和させることができる外部磁界HKは0.5mT・μ0-1であると推定されている。このことから空間分解能Δzは(μ0・HK)/(∂B0(z)/∂z)で計算され、一辺のサイズを、MPIでは0.8[mm/pixel]に、MPHでは3.33[mm/pixel]にそれぞれ設定できることが分かる。これは、MPIによる精査、MPHによる広範囲にわたる加温度のために臨床応用にとって十分な値であると考えられる。
【0054】
以上のシミュレーション結果から、円形コイル15aの電流値I3を制御することでMRIに必要とされる均一な静磁場や、MPIまたはMPHに必要とされるゼロ磁場領域を発生できることが分かる。さらに磁場勾配を調整することで空間分解能を変えることができることも分かる。
【0055】
[MRI用の高周波コイルとMPI/MPH用の高周波コイルとの相互干渉を抑制するための構成]
撮像装置100では、まず準備作業として患者に「がん集積性磁性ナノ粒子薬剤」が静注または穿刺により注入される。患部の加温治療計画を立てるにあたって先ず、MRI装置の部分により患部を含む被検体200の3次元画像データが撮像される。その後、MPIにより患部に集積した磁性ナノ粒子分布を精査したり、必要があればMPH機能で加温治療を行うことになる。治療中の温度測定や治療後の効果判定のために、MPI/MPHの実施後にMRIを再度実施することもある。このような用途においては、MRI用の高周波コイルとMPI/MPH用の高周波コイルとをいちいち交換することは効率的ではない。
【0056】
ところで高周波コイルは、フィリングファクタ(充填率、感度領域体積に対するサンプル容量の比)を高めた方が高効率になることが良く知られている。また、MRIでは対象核種と静磁場強度で決まる磁気共鳴周波数(1.5Tの静磁場強度でプロトンを対象とする場合は63.9[MHz])で動作する高周波コイルを使ってMR信号を収集する。一方、MPI/MPHでは、交番磁界の人体透過性(渦電流損)と送受信効率とを考えて100[kHz]前後の周波数で送受信を行なう必要がある。またMRI用の高周波コイルには、静磁場方向と垂直な方向の高周波磁場しか検出できないという制限がある。送受信の効率をあげるためには送受信コイルを患者体部に接近させることが望ましい。このため撮像装置100では、高周波コイルユニット19がMRI用の高周波コイルとMPI/MPH用の高周波コイルとを一体化しておくことが望ましい。その一方で、両高周波コイルが無関係に配置されていると、コイル間に磁気的結合や容量性結合が生じ、双方の送受信性能が十分に発揮されないといった不具合が生じる可能性が高くなる。
【0057】
このような事情を考慮して、高周波コイルユニット19を以下のような構成としている。
【0058】
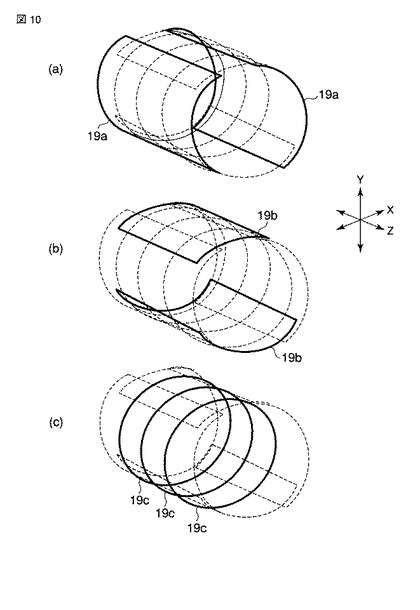
図10は図1中の高周波コイルユニット19に含まれた高周波コイルの形状および配置を示す図である。
【0059】
高周波コイルユニット19は、図10(a)に示すようにX軸方向に配列された一対のコイル19aからなるサドルコイルと、図10(b)に示すようにY軸方向に配列された一対のコイル19bからなるサドルコイルと、図10(c)に示すようにZ方向に配列された例えば3つのループコイルから成るソレノイドコイルとが組み合わされている。これらの高周波コイルのうち、2つのサドルコイルは、X軸およびY軸のそれぞれの方向に交番磁界を発生でき、かつX軸方向およびY軸方向にそれぞれ受信感度を有する。またソレノイドコイルはZ軸方向に交番磁界を発生でき、かつZ軸方向に受信感度を有する。
【0060】
MRIにおいては、画像S/Nを√2倍向上させる目的で、XY平面内で、かつ直交する方向に独立動作する二対のコイルを並べたクアドラチャーコイルがよく利用される。高周波コイルユニット19における2つのサドルコイルは、このクアドラチャーコイルとして機能させることができるる。従って2つのサドルコイルは、MRIのために好適であるので、これらをMRIのために使用する。そしてソレノイドコイルは、MPI/MPHのために使用する。
【0061】
このようにMRI用の高周波コイルとMPI/MPH用の高周波コイルとを、その交番磁界発生方向どうしが、あるいは感度方向どうしが互いに直交するように配置したまま一体化することで、フィリングファクタを高くしたまま相互干渉による送受信効率低下を防ぐことができる。またこのような構成により、MRIとMPI/MPHとを、高周波コイルの交換を行うことなしに一貫して行なうことが可能である。
【0062】
[被検体を移動させるための構成]
ドライブ磁場発生部により発生するオフセット磁場により、ゼロ磁場領域の位置を電気的にシフトさせることは可能である。しかしながら、それを駆動するための大電流を出力可能なアンプの実現性や経済性といった制約から、そのシフト量をあまり大きくすることは難しい。人体全域をMPI/MPHの対象とするためには、約±300[mm]前後のシフト量が必要であり、このシフト量をオフセット磁場により実現することは困難である。
【0063】
そこで寝台部を以下のような構成としている。
【0064】
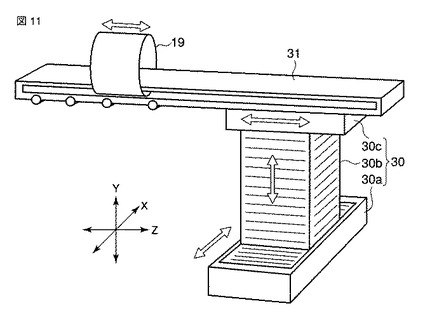
図11は寝台部の一部の構成を示す斜視図である。
【0065】
基台部30は、基底部30a、昇降部30bおよび天板支持部30cを含む。
【0066】
基底部30aは、床面に載置され、必要に応じて固定される。基底部30aは、昇降部30bを支持する。基底部30aは、昇降部30bをX軸方向に往復移動させることができる。
【0067】
昇降部30bは、天板支持部30cを支持する。昇降部30bは、天板支持部30cをY軸方向に、すなわち上下方向に昇降させることができる。
【0068】
天板支持部30cは、天板31を支持する。天板支持部30cは、天板31をZ軸方向に往復移動させることができる。
【0069】
かくして基台部30は、天板31をX,Y,Zの各軸方向に任意に、すなわち三次元的に移動させることができる。空間120aの大きさは、このような天板31の三次元的な移動に際して被検体200に干渉することがないように設定されている。すなわち、被検体200の最大幅を500[mm]とし、ゼロ磁場領域の最大シフト量を±300[mm]とするならば、空間120aの開口径を例えば1100[mm]に設定すればよい。
【0070】
ところでMRIにおいては、被検体200を静磁場中心に配置できれば、被検体200の広範囲を撮像領域としてカバーできる。このため、MRIに際しては天板をX軸方向およびY軸方向に移動する必要がない。このため既存のMRI装置におけるガントリ内部の空間の標準的な開口径は、600[mm]で、最大でも700[mm]である。空間110aの開口径もこの程度で良い。このように、空間120aの開口径は、空間110aの開口径よりも大きくなっている。
【0071】
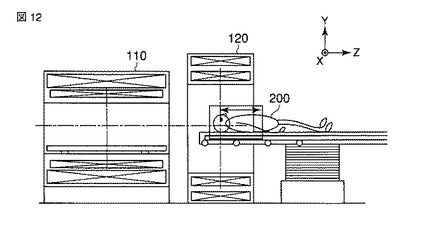
かくして図12に示すようなMPI/MPHを実施する状態においては、寝台部によって被検体200を三次元的に移動させ、被検体200とゼロ磁場領域との相対的な位置関係を任意に変更することができる。
【0072】
ところで、MRガントリ110およびMPガントリ120が、空間110a,120aがX軸方向に直列に並ぶように配置されている。そして寝台部は、空間120aを通して空間110aへと天板31を送り込む。寝台部の基台部30は、MPガントリ120を挟んでMRガントリ110の反対側に配置されているため、図1に示すように空間110aへと被検体200を位置させている状態においては、天板31は片持ち状態となる。この状態で被検体200を支持するためには、天板31の剛性と、基台部30における天板31の支持強度を非常に高めなければならない。
【0073】
しかしながらMRIの際には、空間110aの内部に設けられたガイドレール32が天板31を支持する。このため、天板31の両端において支持されることになるから、天板31の剛性と、基台部30における天板31の支持強度はそれほどに高める必要はない。
【0074】
なお、MRIの際にも天板31はZ軸方向に移動できる必要があるが、ガイドレール32が天板31に設けられたキャスター31aをZ軸方向に案内することによって天板31はZ軸方向にスムーズに移動することができる。
【0075】
さらに、天板31は、高周波コイルユニット19をZ軸方向にスライド可能に支持している。このため、被検体200と高周波コイルユニット19との相対的な位置を自由に変更することが可能で、撮影部位に高周波コイルユニット19を容易に近接させることができる。
【0076】
[MRIとMPI/MPHとの位置合わせのための構成]
通常の臨床に使われるMRIでは、静磁場内にあるプロトンを核種としたMR信号を検出する。MPI/MPHでは、ゼロ磁場内にある磁性ナノ粒子(強磁性体やフェリ磁性体)を検出したり加温する。このためMRIとMPI/MPHとを同時に行なうことはできない。従って臨床的には、「MR画像を形態画像として撮影し、次にMP画像を撮影して画像重畳する」とか、「MR画像を形態画像として撮影し、治療計画を立て、その後MPH装置で加温治療を行なう」といった使い方が想定される。このような用途にあっては、MRIとMPI/MPHとでの位置合わせが重要となる。すなわち、MRIで得られた被検体200の形態画像情報に基づいてMPI/MPHを行なう場合、MRIの座標系O−XYZ(X、Y、Z傾斜磁場の発生方向で決まる座標系)とMPI/MPHの座標系O’−X’Y’Z’(ゼロ磁場中心と寝台の移動方向で決まる座標系)との対応関係を校正しておく必要がある。
【0077】
MRIにおける位置合わせのためには、従来よりマーカが利用されている。しかしながら、MRI用の既存のマーカでは、MPI/MPHにおいてはその位置を検出することが困難である。MRI用のマーカとMPI/MPH用のマーカとをそれぞれ用いる場合には、各マーカを一定の位置関係で配置する必要が生じるため、マーカの配置作業が複雑となるとともに、不適切な配置による位置ずれが生じる恐れを完全には排除できない。
【0078】
そこで本実施形態においては、図13乃至図15に示すようなマーカ310,320,330のいずれかを使用することとする。
【0079】
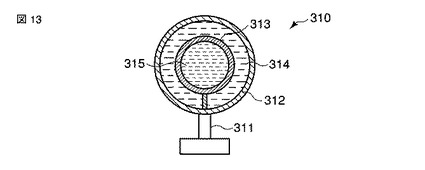
図13はマーカ310の構造を一部を破断して示す図である。
【0080】
マーカ310は、スタンド311、外殻部材312、内殻部材313、ナノ粒子懸濁液314およびMR信号を出すことのできるファントム溶液315を含む。
【0081】
スタンド311は、使用時に被検体200や天板31などに取り付けられ、マーカ310を支持する。
【0082】
外殻部材312は、例えば樹脂などを中空の球形に成形したものである。外殻部材312は、その外側にスタンド311が固着されている。
【0083】
内殻部材313は、例えば樹脂などを中空の球形に成形したものである。外殻部材312の内部空間内に配置され、図示しない支持部材によって外殻部材312との位置関係が変化しないように外殻部材312と連結されている。支持部材は、スタンド311の一部が兼ねても良い。内殻部材313は、その中心位置が外殻部材312の中心位置と一致するように配置されることが望ましい。
【0084】
ナノ粒子懸濁液314は、磁性ナノ粒子を適切な液体に均一に懸濁させたものである。ナノ粒子懸濁液314は、外殻部材312と内殻部材313との間の空間に充填されている。
【0085】
ファントム溶液315は、MR信号を出すプロトンを含む水、オイルなどから構成される液体である。ファントム溶液315は、内殻部材313の内部空間に充填されている。
【0086】
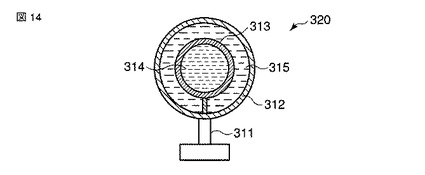
図14はマーカ320の構造を一部を破断して示す図である。なお、図13と同一部分には同一の符号を付し、その詳細な説明は省略する。
【0087】
マーカ320は、マーカ310と同様にスタンド311、外殻部材312、内殻部材313、前記ナノ粒子懸濁液314および前記ファントム溶液315を含む。マーカ320がマーカ310と異なるのは、ナノ粒子懸濁液314およびファントム溶液315が充填されている空間が互いに入れ替わっていることである。すなわち、ナノ粒子懸濁液314が内殻部材313の内部空間に充填され、ファントム溶液315が外殻部材312と内殻部材313との間の空間に充填されている。
【0088】
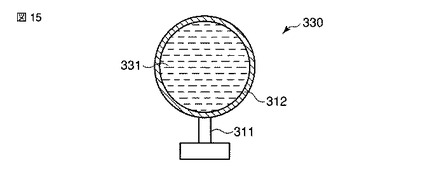
図15はマーカ330の構造を一部を破断して示す図である。なお、図13と同一部分には同一の符号を付し、その詳細な説明は省略する。
【0089】
マーカ330は、スタンド311、外殻部材312および混合液331を含む。
【0090】
すなわちマーカ330は、内殻部材313を有さず、外殻部材312の内部には唯一の空間が形成されている。そしてこの外殻部材312の内部空間に混合液331が充填されている。混合液331は、ナノ粒子懸濁液314およびMR信号を出すファントム溶液315を均一に混合したものである。
【0091】
かくして以上のようなマーカ310,320,330は、MRIおよびMPIのいずれにおいてもその位置を検出できる。さらにマーカ330ではもちろんのこと、マーカ310,320においても外殻部材312の中心位置と内殻部材313の中心位置とを一致させてあれば、マーカ310,320,330はMRIおよびMPIのいずれにおいても同一の位置として検出できる。なお、マーカ310,320における外殻部材312の中心位置と内殻部材313の中心位置とが一致していなくても、その位置関係は固定である。これらのマーカのMRIでの検出位置とMPIでの検出位置とのずれからそれぞれの撮影領域の歪を測ることができ、容易に補正できる。
【0092】
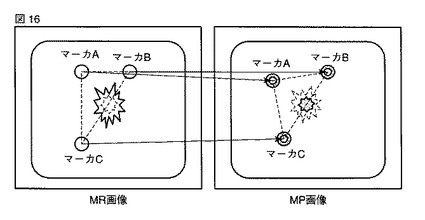
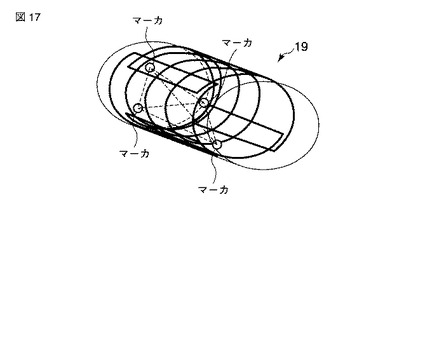
さて、MRIおよびMPI/MPHを複合利用する場合には、被検体200の撮影/治療領域の辺縁部にマーカ310,320,330のいずれかを複数個(座標系間の向きと尺度とを一意に対応付けするため好ましくは4個以上)配置する。撮像装置100では、高周波コイルユニット19は被検体200と一緒に移動するので、非検体撮影時に撮影領域を拡大するだけで、上記のように配置したマーカが図16に示すように写り込むことが望ましい。そのためにはマーカを図17に示すように高周波コイルユニット19の感度領域内にあって、任意の点・軸・面に対し必ず非対称の関係にある位置に配置しておく。高周波コイルユニット19と被検体200との位置関係が固定されていれば、常にMRIとMPIの両方で同一マーカを写し込むことになり、そのマーカの位置関係情報から座標系合わせができる。またMPIとMPHの座標系は原理的に同一なので、正確な位置情報に基づいた加温治療も可能となる。
【0093】
以上のように本実施形態によれば、MRIとMPI/MPHとを融合させて、例えば「MRIを使って磁性ナノ粒子を予め投与された被検体およびマーカを撮影し、次にMPIでその磁性ナノ粒子分布を精査する」、「MRIとMPIとを使って撮影し、その画像に基づいて治療計画を立て、その後MPHによる加温治療を行い、必要であれば治療効果判定のための画像をMRIで得る」といった具合に診断と治療を一連の操作として行なうことが可能となる。
【0094】
また本実施形態によれば、MRI用の静磁場の漏洩磁場をMPI/MPH用のゼロ磁場領域を形成するために利用しているため、MPI/MPH用に一対のセレクション・フィールドコイルを別途設ける場合に比べて構成を簡略化でき、装置全体をコンパクトにすることができる。
【0095】
また本実施形態によれば、MRI用の高周波コイルとMPI/MPH用の高周波コイルとの相互干渉がほとんど生じないので、MRIおよびMPI/MPHのいずれも高精度に実施することが可能である上に、コイル交換などのために操作者の作業負担が増加することもない。
【0096】
また本実施形態では、天板31を空間120aを通して空間110aへと送り込むようにしている。また本実施形態では、基台部30により天板31を三次元的に移動可能とするとともに、空間120aを、天板31の三次元的な移動に際して被検体200に干渉することがないように空間110aよりも大きくしている。このため、空間120aにおいては、被検体200を三次元的に移動させることができ、ゼロ磁場領域と被検体200との相対的な位置関係を自由に変更できる。これにより、被検体200の広範囲をMPI/MPHの対象領域とすることができる。
【0097】
また本実施形態によれば、MRIおよびMPIの双方で撮像可能なマーカ310,320,330を用いるので、MRIとMPI/MPHとを複合的に利用した診断や治療を行う場合に、MRIとMPI/MPHとでの位置合わせを高精度に行うことが可能である。
【0098】
また本実施形態では、磁性ナノ粒子が取り込まれた領域だけを加温治療できるため、MR画像に基づく手術計画で決めた加温領域でも、磁性ナノ粒子が取り込まれていなければ加温されることはない(磁性ナノ粒子分布条件)。また磁性ナノ粒子が分布していても、ゼロ磁場に存在する磁性ナノ粒子しか加温しない(局所加温条件)。従って、これら両方の条件が揃った場所しか加温治療しないという“二重安全”が自動的に確保されるというメリットもある。
【0099】
また本実施形態では、MRガントリ110とMPガントリ120との間に間隙が形成されているので、操作者や医師が、この間隙を利用して被検体200に対する何らかの処置(例えば患者モニタなど)を行うことが可能である。
【0100】
この実施形態は、次のような種々の変形実施が可能である。
【0101】
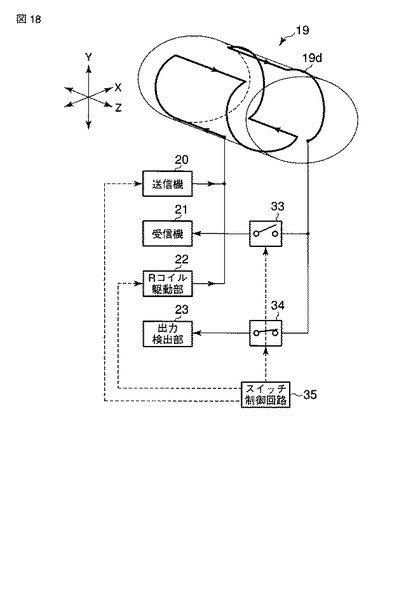
撮像装置100では、MRIとMPI/MPHとが同時に行われることはない。このため、高周波コイルユニット19は、図18に示した構造により1つの高周波コイル19dを共用する構成としても良い。
【0102】
すなわち、高周波コイルユニット19には、1つの高周波コイル19dのみを備えて、この高周波コイル19dに送信機20およびレコーディングコイル駆動部22をともに接続しておく。そして、受信機21および出力検出部23には、切り替えスイッチ33,34をそれぞれ介して高周波コイル19dを接続する。さらにスイッチ制御回路35を設ける。
【0103】
MRIを行うときにスイッチ制御回路35は、切り替えスイッチ33をオン、切り替えスイッチ34をオフとするとともに、レコーディングコイル駆動部22からの高周波電流の出力を停止させる。またMPI/MPHを行うときにスイッチ制御回路35は、切り替えスイッチ33をオフ、切り替えスイッチ34をオンとするとともに、送信機20からのRF電流パルスの出力を停止させる。
【0104】
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。
【図面の簡単な説明】
【0105】
【図1】本発明の一実施形態に係る撮像装置100の構成を示す図。
【図2】図1中のドライブ磁場コイル駆動部18、レコーディングコイル駆動部22および出力検出部23の具体的な構成例を示す図。
【図3】図1中の静磁場コイルユニット11と反発磁場コイルユニット15との関係を模式的に示す図。
【図4】図1中の静磁場コイルユニット11と反発磁場コイルユニット15とにより形成される磁場の分布を示す図。
【図5】MRIを行う場合のB0(z)の分布を示す図。
【図6】MPIを行う場合のB0(z)の分布を示す図。
【図7】MPIを行う場合の磁場勾配分布∂B0(z)/∂zを示す図。
【図8】MPHを行う場合のB0(z)の分布を示す図。
【図9】MPHを行う場合の磁場勾配分布∂B0(z)/∂zを示す図。
【図10】図1中の高周波コイルユニット19に含まれた高周波コイルの形状および配置を示す図。
【図11】寝台部の一部の構成を示す斜視図。
【図12】MPI/MPHを実施する状態を示す図。
【図13】マーカ310の構造を一部を破断して示す図。
【図14】マーカ320の構造を一部を破断して示す図。
【図15】マーカ330の構造を一部を破断して示す図。
【図16】MR画像およびMP画像におけるマーカの表れ方の一例を示す図。
【図17】マーカの配置例を示す図。
【図18】図1中の高周波コイルユニット19の変形構成例を示す図。
【図19】MPI装置の原理的な構成を示す図。
【符号の説明】
【0106】
3…レコーディングコイル、4…Xコイル、5…Yコイル、6…Zコイル、11…静磁場コイルユニット、12…静磁場電源、13…傾斜磁場コイルユニット、14…傾斜磁場電源、15…反発磁場コイルユニット、16…反発磁場電源、17…ドライブ磁場コイルユニット、18…ドライブ磁場コイル駆動部、19…高周波コイルユニット、20…送信機、21…受信機、22…レコーディングコイル駆動部、23…出力検出部、24…シーケンサ、25…ホスト計算機、26…演算ユニット、27…記憶ユニット、28…表示器、29…入力器、30…基台部、31…天板、32…ガイドレール、33,34…切り替えスイッチ、35…スイッチ制御回路、100…撮像装置、110…MRガントリ、120…MPガントリ、110a,120a…空間、200…被検体、310,320,330…マーカ、311…スタンド、312…外殻部材、313…内殻部材、314…ナノ粒子懸濁液、315…ファントム溶液、331…混合液。
【技術分野】
【0001】
本発明は、磁気共鳴イメージング(magnetic resonance imaging:MRI)と磁性微粒子イメージング(magnetic particle imaging:MPI)および/または磁性微粒子温熱療法(magnetic particle hyperthermia:MPH)とを行う機能を兼ね備えた撮像装置に関する。
【背景技術】
【0002】
Philips社により、MPI(magnetic particle imaging)と呼ばれるイメージング装置のコンセプトが提案された(非特許文献1および非特許文献2を参照)。この装置の原理を以下に説明する。
【0003】
図19はMPI装置の原理的な構成を示す図である。
【0004】
いま、磁性微粒子(以下、磁性ナノ粒子と称する)を分散させ、かつ支持体がゲルに磁性ナノ粒子が分散・固定されたファントム1があると仮定する。一対のセレクション・フィールドコイル(selection field coil)2のそれぞれから出る磁力線が互いに向かい合うように静磁場を発生させると、その中心に、磁場強度がある閾値以下となるゼロ磁場領域(field-free field)が生じる。このような不均一磁場内に上記ファントム1を置き、これにレコーディングコイル(recording coil)3を使って、適切な振幅を有し、かつ高調波を含まない高周波磁界を印加する。そうすると、ゼロ磁場領域にある磁性ナノ粒子は、磁気未飽和と磁気飽和の状態を行き来するため、レコーディングコイル3を駆動する駆動アンプから見ると電気的に非線形なインピーダンスを有する負荷を駆動したのと等価になる。そのため出力波形(電圧駆動の場合は出力電流波形、電流駆動の場合は出力電圧波形)には高調波が発生する。これは、例えばトランスが飽和した際の励磁電流の波形に類似している。一方、磁気飽和している領域、すなわちゼロ磁場領域以外の領域にある磁性ナノ粒子に対しては、無負荷を駆動したのと等価になるため、高調波が殆ど含まれない出力波形が観測されることになる。そこで、高調波成分の含有量はゼロ磁場領域に存在する磁性ナノ粒子の分量に比例するものと考えられる。ファントム1に対するゼロ磁場領域の位置をシフトさせながら様々な位置で得られる出力波形における高周波成分の含有量をそれぞれ測定して、各位置における画素の輝度値を測定した含有量に応じた値とすることによって、磁性ナノ粒子の分布量を表す画像が得られる。
【0005】
ファントム1に対するゼロ磁場領域のシフトは、X、Y、Z軸方向にオフセット均一磁場を発生させるドライビングフィールドコイル(driving field coil)を使ってゼロ磁場領域を電気的に3次元走査する方法や、ファントムを載せたステージを機械的に移動させて3次元走査する方法により実現される。なおドライビングフィールドコイルは、例えば図19に示すような一対のXコイル4、一対のYコイル5および一対のZコイル6を含んで構成される。
【0006】
以上がMPIの基本原理である。
【0007】
非特許文献1ではさらに、レコーディングコイル3に印加する高周波電力を大きくすれば、ヒステリシス損、ブラウン緩和、ネール緩和などに起因する磁性ナノ粒子の発熱現象を利用してゼロ磁場領域にある磁性ナノ粒子を発熱させ、それ以外の領域にある磁性ナノ粒子は殆ど発熱させずに済むことが示唆されている。すなわち、従来のハイパーサーミアでは実現困難であった、ピンポイントでの選択的な加温制御が可能となるという可能性についての示唆も与えている。
【0008】
しかしながら、静注されたMRI造影剤(例えば、日本シェーリング株式会社製のResovist(登録商標))の体内濃度から推定されるMPIによるS/Nは、MRI装置のS/Nより2桁オーダ高くなると見積もられており、磁性ナノ粒子の分布しか検出できないという制約があるものの高感度な撮像方法として期待されている。
【0009】
一方、別のイメージング法として、磁気共鳴イメージング法(以下、MRIと称する)は広く知られている。
【0010】
現在最も一般的なMRI装置は、1.5T超電導マグネットを使った横置き円筒型のもので、3Tのものも徐々に普及しつつある。MPIではゼロ磁場を発生させることが不可欠で、その大きさ(分解能に対応)を所望のサイズ内におさめることが重要である。そのゼロ磁場領域は「磁性ナノ粒子の磁化がその材質の飽和磁束密度を真空の透磁率で割った値以下となる外部磁場の空間」と定義できる。このため、磁性ナノ粒子が高透磁率であってそれに磁束飽和を起させる外部磁場が低ければ低いほど、強力な超電導磁石で発生させた静磁場勾配が大きければ大きいほど、ゼロ磁場領域を小さくでき、結果的に空間分解能を高くすることができる。現在の技術を応用することで、MPIで必要とされる1mm以下オーダーの分解能を実現するために必要な磁性ナノ粒子、超電導磁石も現在の技術の範囲内で十分実現可能である。
【非特許文献1】Bernhard Gleich、Juergen Weizenecker、“Tomographic imaging using the nonlinear response of magnetic particles” Nature Letters Vol.435, 2005年6月30日、P.1214−1217
【非特許文献2】B.Gleich、J.Borgert、J.Weizenecker、“Magnetic Particle Imaging (MPI)”、MEDICAMUNDI 50/1、2006年5月、P.66−71
【発明の開示】
【発明が解決しようとする課題】
【0011】
MPIでは、磁性ナノ粒子の存在分布を定量的に検出することしかできず、人体などの被検体の形態画像を撮像することはできない。このため臨床的には、MRI、X線CT、超音波撮像などの既存のイメージング技術と組み合わせて用いる必要がある。すなわち、既存の撮像装置とMPI装置および/またはMPH装置とを融合した撮像装置が望まれると考えられる。
【0012】
しかしながら、既存のイメージング装置とMPI装置および/またはMPH装置とを全く個別に構成して融合したのでは、得られる撮像装置は大掛かりな構成になってしまうことは明らかである。
【0013】
本発明はこのような事情を考慮してなされたものであり、その目的とするところは、磁気共鳴イメージングとMPIおよび/またはMPHとを融合した撮像装置を簡易な構成により実現することにある。
【課題を解決するための手段】
【0014】
本発明の一態様による撮像装置は、静磁場を発生する静磁場磁石と、前記静磁場に傾斜磁場を重畳する傾斜磁場磁石と、前記静磁場中に配置された被検体に印加するための第1の高周波磁場を発生する第1の高周波磁場コイルと、前記被検体から放射される磁気共鳴信号を受信する第1の受信手段と、前記第1の受信手段により受信された前記磁気共鳴信号に基づいて前記被検体に関する画像を再構成する手段と、前記静磁場磁石からの漏洩磁場と局所的に相殺させることによりゼロ磁場領域を形成するための反発磁場を発生する反発磁場磁石と、前記ゼロ磁場領域に移動された前記被検体に印加するための第2の高周波磁場を発生する第2の高周波磁場コイルとを備える。
【発明の効果】
【0015】
本発明によれば、磁気共鳴イメージングとMPIおよび/またはMPHとを簡易な構成により実現する撮像装置を提供できる。
【発明を実施するための最良の形態】
【0016】
以下、図面を参照して本発明の一実施形態について説明する。
【0017】
図1は本実施形態に係る撮像装置100の構成を示す図である。なお図1においては一部を簡略化して、あるいは破断して示している。
【0018】
この撮像装置100は、静磁場発生部、傾斜磁場発生部、反発磁場発生部、ドライブ磁場発生部、高周波送受信部および制御・演算部を備えている。そしてこの撮像装置100は構成要素として、静磁場コイルユニット11、静磁場電源12、傾斜磁場コイルユニット13および傾斜磁場電源14からなるMRI装置の部分と、反発磁場コイルユニット15、反発磁場電源16、ドライブ磁場(ドライビングフィールド)コイルユニット17、ドライブ磁場コイル駆動部(DFコイル駆動部)18、高周波コイルユニット19、送信機20、受信機21、レコーディングコイル駆動部22、出力検出部23、シーケンサ24、ホスト計算機25、演算ユニット26、記憶ユニット27、表示器28、入力器29、基台部30、天板31およびガイドレール32からなるMPI装置および/またはMPH装置の部分とから構成される。
【0019】
さらにこの撮像装置100は、上記の構成要素の一部を収容するためにMRガントリ110およびMPガントリ120を備える。MRガントリ110およびMPガントリ120は、それぞれ空間110a,120aを有している。空間110a,120aは、いずれもZ軸方向の両端が開口されている。MRガントリ110およびMPガントリ120は、空間110a,120aがZ軸方向、すなわち静磁場方向に直列に並ぶように配置される。MRガントリ110およびMPガントリ120は、互いの間に間隙を形成するように離間して配置されている。空間120aは、空間110aよりも開口面積が大きい。ただし、MRガントリ110およびMPガントリ120は、間隙をほとんど形成しないように配置されていても良いし、互いに接合されていても良い。また空間110aは、MPガントリ120からの遠端においては必ずしも開口している必要はない。
【0020】
静磁場発生部は、静磁場コイルユニット11および静磁場電源12を含む。静磁場コイルユニット11は、MRガントリ110に収容されている。静磁場コイルユニット11は、空間110aの周囲にリング状に配置された静磁場コイルを少なくとも1つ含む。この静磁場コイルとしては、例えば超電導コイルまたは常電導コイルが使用される。この超電導コイルが用いられる場合に静磁場コイルユニット11には、静磁場コイルを冷却するための冷却機構などが含まれ、図示しない冷却機によって静磁場コイルを超電導状態に保つ。静磁場電源12は、静磁場コイルユニット11を励磁もしくは減磁する場合にだけ電流を供給する。かくして静磁場発生部は、空間110aの中に静磁場B0を発生する。この静磁場B0の磁場方向は、Z軸方向にほぼ一致する。なお、静磁場発生部には、さらにシムコイルおよびシム電源や鉄シムが設けられ、静磁場の均一性の補正が図られることがある。
【0021】
傾斜磁場発生部は、傾斜磁場コイルユニット13および傾斜磁場電源14を含む。傾斜磁場コイルユニット13は、MRガントリ110に収容されている。傾斜磁場コイルユニット13は、空間110aと静磁場コイルユニット11との間に配置された3組の傾斜磁場コイルを備える。3組の傾斜磁場コイルは、互いに直交するX軸方向、Y軸方向およびZ軸方向のそれぞれの傾斜磁場を発生させる。傾斜磁場電源14は、シーケンサ24の制御のもとで、3組の傾斜磁場コイルに傾斜磁場を発生させるためのパルス電流をそれぞれ供給する。かくして傾斜磁場発生部は、傾斜磁場電源14から3組の傾斜磁場コイルのそれぞれに供給するパルス電流を制御することにより、物理軸である3軸(X軸,Y軸,Z軸)方向の傾斜磁場を合成して、互いに直交するスライス方向傾斜磁場Gss、位相エンコード方向傾斜磁場Gpe、および読出し方向(周波数エンコード方向)傾斜磁場Groからなる各論理軸方向のそれぞれの傾斜磁場を任意に設定する。スライス方向、位相エンコード方向および読出し方向の各傾斜磁場Gss,Gpe,Groは、静磁場B0に重畳される。
【0022】
反発磁場発生部は、反発磁場コイルユニット15および反発磁場電源16を含む。反発磁場コイルユニット15は、MPガントリ120に収容されている。反発磁場コイルユニット15は、空間120aの周囲にリング状に配置された反発磁場コイルを少なくとも1つ含む。この反発磁場コイルとしては、例えば超電導コイルまたは常電導コイルが使用される。この超電導コイルが用いられる場合に反発磁場コイルユニット15には、反発磁場コイルを冷却するための冷却機構などが含まれ、図示しない冷却機によって反発磁場コイルを超電導状態に保つ。反発磁場電源16は、反発磁場コイルユニット15に電流を供給する。かくして反発磁場発生部は、空間120aの中およびその近傍に静磁場を発生させる。この静磁場の磁場方向は、MRガントリ110の外部に及んだ漏洩磁場の磁力線と向かい合う方向である。かくして、反発磁場発生部で発生される静磁場は、MRガントリ110からの漏洩磁場に反発するから、これを反発磁場と称する。
【0023】
ドライブ磁場発生部は、ドライブ磁場コイルユニット17およびドライブ磁場コイル駆動部18を含む。ドライブ磁場コイルユニット17は、MPガントリ120に収容されている。ドライブ磁場コイルユニット17は、図19に示した一対のXコイル4、一対のYコイル5および一対のZコイル6にそれぞれ相当するコイルを含む。これらのコイルは、空間120aの周囲に配置されている。ドライブ磁場コイル駆動部18は、ドライブ磁場コイルユニット17に含まれる各コイルに適宜に電流を供給する。かくしてドライブ磁場発生部は、ドライブ磁場コイル駆動部18からの供給電流を制御することにより、ゼロ磁場領域の位置をシフトさせるための任意のオフセット磁場(ドライブ磁場)を空間120aおよびその周辺に発生する。
【0024】
高周波送受信部は、高周波コイルユニット19、送信機20、受信機21、レコーディングコイル駆動部22および出力検出部23を含む。高周波コイルユニット19は、被検体200の近傍に配置される。高周波コイルユニット19は、少なくとも1つの高周波コイルを含む。送信機20および受信機21は、シーケンサ24の制御の下で動作する。送信機20は、核磁気共鳴(NMR)を起こさせるためのラーモア周波数のRF電流パルスを高周波コイルユニット19に供給する。受信機21は、高周波コイルユニット19が受信したエコー信号などのMR信号を取り込み、これに前置増幅、中間周波変換、位相検波、低周波増幅、あるいはフィルタリングなどの各種の信号処理を施した後、A/D変換してエコー信号に応じたデジタル量のエコーデータ(原データ)を生成する。レコーディングコイル駆動部22および出力検出部23は、ホスト計算機25の制御の下で動作する。レコーディングコイル駆動部22は、適切な振幅を有し、かつ高調波を含まない高周波電流を高周波コイルユニット19に供給する。出力検出部23は、レコーディングコイル駆動部22の出力電力の変化を検出する。また出力検出部23は、出力電力の変化に含まれる高調波信号をフーリエ変換する。
【0025】
制御・演算部は、シーケンサ24、ホスト計算機25、演算ユニット26、記憶ユニット27、表示器28および入力器29を含む。
【0026】
シーケンサ24は、CPUおよびメモリを備えている。シーケンサ24は、ホスト計算機25から送られてきたパルスシーケンス情報をメモリに記憶する。シーケンサ24のCPUは、メモリに記憶したシーケンス情報にしたがって、傾斜磁場電源14、送信機20および受信機21の動作を制御するとともに、受信機21が出力したエコーデータを一旦入力し、これを演算ユニット26に転送する。ここで、シーケンス情報とは、一連のパルスシーケンスにしたがって傾斜磁場電源14、送信機20および受信機21を動作させるために必要な全ての情報であり、例えば3組の傾斜磁場コイルに印加するパルス電流の強度、印加時間および印加タイミングなどに関する情報を含む。
【0027】
ホスト計算機25は、予め定められたソフトウエア手順を実行することにより実現される各種の機能を有している。この機能の1つは、シーケンサ24にパルスシーケンス情報を指令するとともに、装置全体の動作を統括する。上記の機能の1つは、高周波コイルユニット19がMRガントリ110内にあるときのみ使われる送信機20および受信機21と、高周波コイルユニット19がMPガントリ120内にあるときのみ使われるレコーディングコイル駆動部22および出力検出部23とが同時に動作しないように動作モードに応じて制御する。具体的にはホスト計算機25は、MRIモード時には送信機20および受信機21を動作させ、MPIモード時およびMPHモード時にはレコーディングコイル駆動部22および出力検出部23を動作させる。上記の機能の1つは、MPIモード時とMPHモード時とでレコーディングコイル駆動部22が出力する高周波電流の振幅や周波数を変更させる。
【0028】
演算ユニット26は、受信機21が出力したエコーデータを、シーケンサ24を通して入力する。演算ユニット26は、入力したエコーデータを、内部メモリに設定したフーリエ空間(k空間または周波数空間とも呼ばれる)に配置する。演算ユニット26は、フーリエ空間に配置されたエコーデータを2次元または3次元のフーリエ変換に付して実空間の画像データ(MR画像データ)を再構成する。また演算ユニット26は、必要に応じて、画像に関するデータの合成処理や差分演算処理などを行うことができる。
【0029】
記憶ユニット27は、MR画像データ、MP画像データ、さらには上述の合成処理や差分処理が施された画像データを記憶する。
【0030】
表示器28は、ユーザに提示するべき各種の画像をホスト計算機25の制御の下に表示する。表示器28としては、フラットパネルディスプレイと称される通常の表示デバイスを利用可能である。
【0031】
入力器29は、術者が希望する撮影条件、パルスシーケンス、画像合成や差分演算に関する情報などの各種の情報を入力する。入力器29は、入力した情報をホスト計算機25に送る。入力器29としては、マウスやトラックボールなどのポインティングデバイス、モード切替スイッチ等の選択デバイス、あるいはキーボード等の入力デバイスを適宜に備える。
【0032】
寝台部は、基台部30、天板31およびガイドレール32を含む。基台部30は、天板31を支持する。基台部30は、天板31をX軸、Y軸およびZ軸の各方向にそれぞれ移動させることができる。天板31は、その上面に被検体200が載置される。天板31は、基台部30によってZ軸方向に移動されることで、被検体200を空間110a,120aに送り込んだり、空間110a,120aから抜き出したりする。ガイドレール32は、空間110a内にてMRガントリ110に取り付けられている。ガイドレール32は、空間110a内に送り込まれた天板31を支持するとともに、天板31のZ軸方向への移動を案内する。
【0033】
図2は図1中のドライブ磁場コイル駆動部18、レコーディングコイル駆動部22および出力検出部23の具体的な構成例を示す図である。
【0034】
いま、静磁場コイルユニット11の漏洩磁場と反発磁場コイルユニット16の反発磁場とにより、座標原点にゼロ磁場領域が発生しているものとする。ドライブ磁場コイル駆動部18は、ディジタル−アナログ変換器(DAC)18a,18b,18cおよびパワーアンプ18d,18e,18fを含む。DAC18a,18b,18cには、X軸方向、Y軸方向およびZ軸方向についてのオフセット磁場のオフセット量を表すデータがホスト計算機25よりそれぞれ与えられる。DAC18a,18b,18cは、このデータに応じたレベルの電流を出力する。DAC18a,18b,18cから出力された電流は、パワーアンプ18d,18e,18fにそれぞれ入力される。パワーアンプ18d,18e,18fは、入力される電流を、Xコイル4、Yコイル5およびZコイル6により必要な強さのドライブ磁場を発生させるための適切なレベルまで増幅する。そしてパワーアンプ18d,18e,18fの出力電流は、Xコイル4、Yコイル5およびZコイル6にそれぞれ供給される。
【0035】
レコーディングコイル駆動部22は、ディジタル−アナログコンバータ(DAC)22a、パワーアンプ22b、ローパスフィルタ(LPF)22cおよびマッチング回路22dを含む。
【0036】
DAC22aには、レコーディングコイル3に供給するべき電流のレベルを表すデータがホスト計算機25より与えられる。DAC22aは、このデータに応じたレベルの電流を出力する。パワーアンプ22bは、DAC22aが出力する電流を、レコーディングコイル3から適切な振幅を有した高周波磁界を発生させるための適切なレベルまで増幅する。LPF22cは、パワーアンプ22bが出力する電流から高調波成分を除去するために使われる。マッチング回路22dは、パワーアンプ22bの出力インピーダンスとレコーディングコイル3のインピーダンスとを整合させることにより、レコーディングコイル3で消費される有能電力を最大にするために使われる。
【0037】
出力検出部23は、抵抗器23a,23b,23cおよびコンデンサ23d,23eからなる分圧回路、反転プリアンプ23f、可変ゲインアンプ23g、非反転プリアンプ23h、加算回路23i、アナログ−ディジタル変換器(ADC)23j、高速フーリエ変換エンジン(FFT)23k、乗算回路23mおよびアナログ−ディジタル変換器(ADC)23nを含む。
【0038】
マッチング回路22dの出力電圧Voは、抵抗器23a,23bおよびコンデンサ23d,23eにより検出されて反転プリアンプ23fに入力される。反転プリアンプ23fは、電圧Voの極性を反転させるとともに、一定のゲインで増幅する。可変ゲインアンプ23gは、反転プリアンプ23fから出力される電圧を任意のゲインで増幅する。
【0039】
マッチング回路22dの出力電流Ioは、電流検出器から出力される電流信号として検出された後、さらに抵抗器23cにより電圧信号に変換されて、非反転プリアンプ23fに入力される。非反転プリアンプ23fは、電流Ioの極性をそのままで一定のゲインで増幅する。
【0040】
加算回路23iは、可変ゲインアンプ23gから出力される電圧値に非反転プリアンプ23fから出力される電流値を加算する。ただし可変ゲインアンプ23gのゲインは、加算回路23iにおける加算により、非反転プリアンプ23fから出力される電流に含まれる基本波を打ち消すように調整される。これにより加算回路23iの出力としては、マッチング回路22dの出力電流に生じる高調波成分に応じた高調波信号が得られる。ADC23jは、高調波信号をディジタル化する。FFT23kは、高調波信号をフーリエ変換する。フーリエ変換の結果は、ホスト計算機25に与えられる。
【0041】
乗算回路23mは、可変ゲインアンプ23gから出力される電圧値に非反転プリアンプ23fから出力される電流値を乗算する。これにより乗算回路23mの出力としては、マッチング回路22dの出力電力値に応じた出力電力信号が得られる。ADC23nは、出力電力信号をディジタル化する。ディジタル化された出力電力信号は、ホスト計算機25に与えられる。この信号は、レコーディングコイル駆動部23の入力に負帰還され、レコーディングコイル3に印加される電力が常に入力信号に比例するように制御するために利用される。
【0042】
以上が撮像装置100の概略構成である。以下に、この撮像装置100の特徴的な構成について詳細に説明する。
【0043】
[MPIおよびMPHのためのゼロ磁場領域を形成するための構成]
図3は静磁場コイルユニット11と反発磁場コイルユニット15との関係を模式的に示す図である。
【0044】
静磁場コイルユニット11は、均一な静磁場を発生する必要があるため、これを円形コイル11a,11bを対向配置した“ヘルムホルツコイル”で近似する。その円形コイル11a,11bの外側に、反発磁場コイルユニット15に含まれる反発磁場コイルとしての円形コイル15aを配置したモデルを考える。
【0045】
円形コイル11a,11bは、直径が互いに等しく、その半径をaとおく。また円形コイル11a,11bの互いの間隔を半径aと等しくする。円形コイル11a,11bの中心を通るZ軸上における円形コイル11a,11bどうしの中間の地点をOとおく。円形コイル11a,11bのそれぞれの中心と地点Oとの間の距離はbとおく。従って、a=2bである。さらに、円形コイル11a,11bには同じ向きの電流が流され、それらの電流値をI1、I2とおく。ただし、I1=I2である。円形コイル15aは、aよりも大きな半径を持ち、この半径をcとおく。円形コイル11bと円形コイル15aとの間隔をdとおく。円形コイル15aには、円形コイル11a,11bとは逆方向の電流が流され、その電流値をI3とおく。
【0046】
この撮像装置において、MRI装置としての静磁場均一性をできるだけ損なわずに撮影できるように、MRIとMPIまたはMPHとを同時に行わないこととする。すなわちMRI装置で撮影する際には、電流値I3を0[A]に制御する。一方、MPIまたはMPHを行う際には、円形コイル11a,11bにより発生される磁場と円形コイル15aにより発生される反発磁場とにより、所望の磁場勾配を持つゼロ磁場領域を、例えば図4に示すように形成するように電流値I3を制御する。例えば、米国Stereotaxis社のMagnetic Navigation Systemが磁石を先端に取り付けたカテーテルを生体内に牽引するために使用している磁極は、超電導マグネットで構成され、短時間で永久電流値を変化させることができることから、このような円形コイル15aは既存の技術を利用して十分に実現可能である。
【0047】
幾何学的対称性から中心軸上の磁場に関しては解析的に表現でき、Z軸方向の変位をzとしたときのZ軸上の静磁場Z成分H0(z)(=B0(z)/μ0、μ0:真空の透磁率)は次の式(1)のように表される。
【数1】
【0048】
I3=0のとき、円形コイル11aと円形コイル11bとの中間地点Oで均一磁場が発生する条件は、式(1)を級数展開した式においてzに関する1次の項と2次の項の係数とが恒等的に0になるように半径aおよび距離bを定めることに対応する。この場合の半径aおよび距離bの関係は、b=a/2となり、円形コイル11a,11bは“ヘルムホルツコイル”の配置(a=2b)が適していることが分かる。このとき円形コイル11bと円形コイル15aとの間で生じる“ゼロ磁場ポイント”は、次の式(2)=0とおいて数値的に解けば、その位置はz0として求めることができる。
【数2】
【0049】
このときの磁場勾配dH0(z)/dz(=(1/μ0)・∂B0(z)/∂z)は、次の式(3)のように表される。
【数3】
【0050】
例えばa=1、b=0.5、c=1.5、d=0.5[m]、I1=0.7958×106[A・turn](=I2)、I3=0[A・turn]としたとき、すなわちMRI装置で撮影する行う場合のB0(z)の分布を図5に示す。図5からは、z=0[m]の近傍は均一な磁場(=0.7T・μ0-1)が発生しており、かつその周辺にゼロ磁場領域は生じないことが分かる。ここでμ0は真空の透磁率を表すものとする。
【0051】
次にa=1、b=0.5、c=1.5、d=0.5[m]、I1=0.7958×106[A・turn](=I2)、I3=1.1937×106[A・turn]としたとき、すなわちイメージング手段として高い空間分解能が要求されるMPIを行う場合のB0(z)の分布を図6に示す。図6からは、z=0.9[m]にゼロ磁場領域(ゼロクロスする点の近傍)が生じることが分かる。このときの磁場勾配分布∂B0(z)/∂zは図7に示すようになる。図7からは、ゼロ磁場ポイントでの磁場勾配は0.625T・μ0-1/mとなることが分かる。
【0052】
更に条件を変えて、a=1、b=0.5、c=1.5、d=0.5[m]、I1=0.7958×106[A・turn](=I2)、I3=0.55706×106[A・turn]としたとき、すなわち加温治療のためにそれほど高い空間分解能が要求されないMPHを行う場合のB0(z)の分布を図8に示す。図8からは、z=1.6[m]にゼロ磁場領域が生じることが分かる。このときの磁場勾配分布∂B0(z)/∂zは図9に示すようになる。図9からは、ゼロ磁場ポイントでの磁場勾配は0.15T・μ0-1/mとなることが分かる。
【0053】
磁性ナノ粒子(フェリ磁性)は10〜数10[nm]オーダの直径に調整されているため磁区構造を取ることができず、単磁区粒子と呼ばれている。そのため巨視的にはヒステリシス特性を殆ど持たず、超常磁性を示すことが知られている。超常磁性MRI造影剤として市販されているResovist(登録商標)などでは、デキストラン等の高分子を使って表面をコーティングする処理が行われている。これにより凝集の回避、生体安全性を図っている。この造影剤は静注や穿刺の手段により患部に導入され、腫瘍組織にできた粗雑な新生血管に見られるEPR(enhanced permeation and retention)効果によって効率よく取り込まれる。Resovist(登録商標)の粒子径は平均30[nm]程度である。非特許文献1によれば、この大きさの磁性ナノ粒子を磁気飽和させることができる外部磁界HKは0.5mT・μ0-1であると推定されている。このことから空間分解能Δzは(μ0・HK)/(∂B0(z)/∂z)で計算され、一辺のサイズを、MPIでは0.8[mm/pixel]に、MPHでは3.33[mm/pixel]にそれぞれ設定できることが分かる。これは、MPIによる精査、MPHによる広範囲にわたる加温度のために臨床応用にとって十分な値であると考えられる。
【0054】
以上のシミュレーション結果から、円形コイル15aの電流値I3を制御することでMRIに必要とされる均一な静磁場や、MPIまたはMPHに必要とされるゼロ磁場領域を発生できることが分かる。さらに磁場勾配を調整することで空間分解能を変えることができることも分かる。
【0055】
[MRI用の高周波コイルとMPI/MPH用の高周波コイルとの相互干渉を抑制するための構成]
撮像装置100では、まず準備作業として患者に「がん集積性磁性ナノ粒子薬剤」が静注または穿刺により注入される。患部の加温治療計画を立てるにあたって先ず、MRI装置の部分により患部を含む被検体200の3次元画像データが撮像される。その後、MPIにより患部に集積した磁性ナノ粒子分布を精査したり、必要があればMPH機能で加温治療を行うことになる。治療中の温度測定や治療後の効果判定のために、MPI/MPHの実施後にMRIを再度実施することもある。このような用途においては、MRI用の高周波コイルとMPI/MPH用の高周波コイルとをいちいち交換することは効率的ではない。
【0056】
ところで高周波コイルは、フィリングファクタ(充填率、感度領域体積に対するサンプル容量の比)を高めた方が高効率になることが良く知られている。また、MRIでは対象核種と静磁場強度で決まる磁気共鳴周波数(1.5Tの静磁場強度でプロトンを対象とする場合は63.9[MHz])で動作する高周波コイルを使ってMR信号を収集する。一方、MPI/MPHでは、交番磁界の人体透過性(渦電流損)と送受信効率とを考えて100[kHz]前後の周波数で送受信を行なう必要がある。またMRI用の高周波コイルには、静磁場方向と垂直な方向の高周波磁場しか検出できないという制限がある。送受信の効率をあげるためには送受信コイルを患者体部に接近させることが望ましい。このため撮像装置100では、高周波コイルユニット19がMRI用の高周波コイルとMPI/MPH用の高周波コイルとを一体化しておくことが望ましい。その一方で、両高周波コイルが無関係に配置されていると、コイル間に磁気的結合や容量性結合が生じ、双方の送受信性能が十分に発揮されないといった不具合が生じる可能性が高くなる。
【0057】
このような事情を考慮して、高周波コイルユニット19を以下のような構成としている。
【0058】
図10は図1中の高周波コイルユニット19に含まれた高周波コイルの形状および配置を示す図である。
【0059】
高周波コイルユニット19は、図10(a)に示すようにX軸方向に配列された一対のコイル19aからなるサドルコイルと、図10(b)に示すようにY軸方向に配列された一対のコイル19bからなるサドルコイルと、図10(c)に示すようにZ方向に配列された例えば3つのループコイルから成るソレノイドコイルとが組み合わされている。これらの高周波コイルのうち、2つのサドルコイルは、X軸およびY軸のそれぞれの方向に交番磁界を発生でき、かつX軸方向およびY軸方向にそれぞれ受信感度を有する。またソレノイドコイルはZ軸方向に交番磁界を発生でき、かつZ軸方向に受信感度を有する。
【0060】
MRIにおいては、画像S/Nを√2倍向上させる目的で、XY平面内で、かつ直交する方向に独立動作する二対のコイルを並べたクアドラチャーコイルがよく利用される。高周波コイルユニット19における2つのサドルコイルは、このクアドラチャーコイルとして機能させることができるる。従って2つのサドルコイルは、MRIのために好適であるので、これらをMRIのために使用する。そしてソレノイドコイルは、MPI/MPHのために使用する。
【0061】
このようにMRI用の高周波コイルとMPI/MPH用の高周波コイルとを、その交番磁界発生方向どうしが、あるいは感度方向どうしが互いに直交するように配置したまま一体化することで、フィリングファクタを高くしたまま相互干渉による送受信効率低下を防ぐことができる。またこのような構成により、MRIとMPI/MPHとを、高周波コイルの交換を行うことなしに一貫して行なうことが可能である。
【0062】
[被検体を移動させるための構成]
ドライブ磁場発生部により発生するオフセット磁場により、ゼロ磁場領域の位置を電気的にシフトさせることは可能である。しかしながら、それを駆動するための大電流を出力可能なアンプの実現性や経済性といった制約から、そのシフト量をあまり大きくすることは難しい。人体全域をMPI/MPHの対象とするためには、約±300[mm]前後のシフト量が必要であり、このシフト量をオフセット磁場により実現することは困難である。
【0063】
そこで寝台部を以下のような構成としている。
【0064】
図11は寝台部の一部の構成を示す斜視図である。
【0065】
基台部30は、基底部30a、昇降部30bおよび天板支持部30cを含む。
【0066】
基底部30aは、床面に載置され、必要に応じて固定される。基底部30aは、昇降部30bを支持する。基底部30aは、昇降部30bをX軸方向に往復移動させることができる。
【0067】
昇降部30bは、天板支持部30cを支持する。昇降部30bは、天板支持部30cをY軸方向に、すなわち上下方向に昇降させることができる。
【0068】
天板支持部30cは、天板31を支持する。天板支持部30cは、天板31をZ軸方向に往復移動させることができる。
【0069】
かくして基台部30は、天板31をX,Y,Zの各軸方向に任意に、すなわち三次元的に移動させることができる。空間120aの大きさは、このような天板31の三次元的な移動に際して被検体200に干渉することがないように設定されている。すなわち、被検体200の最大幅を500[mm]とし、ゼロ磁場領域の最大シフト量を±300[mm]とするならば、空間120aの開口径を例えば1100[mm]に設定すればよい。
【0070】
ところでMRIにおいては、被検体200を静磁場中心に配置できれば、被検体200の広範囲を撮像領域としてカバーできる。このため、MRIに際しては天板をX軸方向およびY軸方向に移動する必要がない。このため既存のMRI装置におけるガントリ内部の空間の標準的な開口径は、600[mm]で、最大でも700[mm]である。空間110aの開口径もこの程度で良い。このように、空間120aの開口径は、空間110aの開口径よりも大きくなっている。
【0071】
かくして図12に示すようなMPI/MPHを実施する状態においては、寝台部によって被検体200を三次元的に移動させ、被検体200とゼロ磁場領域との相対的な位置関係を任意に変更することができる。
【0072】
ところで、MRガントリ110およびMPガントリ120が、空間110a,120aがX軸方向に直列に並ぶように配置されている。そして寝台部は、空間120aを通して空間110aへと天板31を送り込む。寝台部の基台部30は、MPガントリ120を挟んでMRガントリ110の反対側に配置されているため、図1に示すように空間110aへと被検体200を位置させている状態においては、天板31は片持ち状態となる。この状態で被検体200を支持するためには、天板31の剛性と、基台部30における天板31の支持強度を非常に高めなければならない。
【0073】
しかしながらMRIの際には、空間110aの内部に設けられたガイドレール32が天板31を支持する。このため、天板31の両端において支持されることになるから、天板31の剛性と、基台部30における天板31の支持強度はそれほどに高める必要はない。
【0074】
なお、MRIの際にも天板31はZ軸方向に移動できる必要があるが、ガイドレール32が天板31に設けられたキャスター31aをZ軸方向に案内することによって天板31はZ軸方向にスムーズに移動することができる。
【0075】
さらに、天板31は、高周波コイルユニット19をZ軸方向にスライド可能に支持している。このため、被検体200と高周波コイルユニット19との相対的な位置を自由に変更することが可能で、撮影部位に高周波コイルユニット19を容易に近接させることができる。
【0076】
[MRIとMPI/MPHとの位置合わせのための構成]
通常の臨床に使われるMRIでは、静磁場内にあるプロトンを核種としたMR信号を検出する。MPI/MPHでは、ゼロ磁場内にある磁性ナノ粒子(強磁性体やフェリ磁性体)を検出したり加温する。このためMRIとMPI/MPHとを同時に行なうことはできない。従って臨床的には、「MR画像を形態画像として撮影し、次にMP画像を撮影して画像重畳する」とか、「MR画像を形態画像として撮影し、治療計画を立て、その後MPH装置で加温治療を行なう」といった使い方が想定される。このような用途にあっては、MRIとMPI/MPHとでの位置合わせが重要となる。すなわち、MRIで得られた被検体200の形態画像情報に基づいてMPI/MPHを行なう場合、MRIの座標系O−XYZ(X、Y、Z傾斜磁場の発生方向で決まる座標系)とMPI/MPHの座標系O’−X’Y’Z’(ゼロ磁場中心と寝台の移動方向で決まる座標系)との対応関係を校正しておく必要がある。
【0077】
MRIにおける位置合わせのためには、従来よりマーカが利用されている。しかしながら、MRI用の既存のマーカでは、MPI/MPHにおいてはその位置を検出することが困難である。MRI用のマーカとMPI/MPH用のマーカとをそれぞれ用いる場合には、各マーカを一定の位置関係で配置する必要が生じるため、マーカの配置作業が複雑となるとともに、不適切な配置による位置ずれが生じる恐れを完全には排除できない。
【0078】
そこで本実施形態においては、図13乃至図15に示すようなマーカ310,320,330のいずれかを使用することとする。
【0079】
図13はマーカ310の構造を一部を破断して示す図である。
【0080】
マーカ310は、スタンド311、外殻部材312、内殻部材313、ナノ粒子懸濁液314およびMR信号を出すことのできるファントム溶液315を含む。
【0081】
スタンド311は、使用時に被検体200や天板31などに取り付けられ、マーカ310を支持する。
【0082】
外殻部材312は、例えば樹脂などを中空の球形に成形したものである。外殻部材312は、その外側にスタンド311が固着されている。
【0083】
内殻部材313は、例えば樹脂などを中空の球形に成形したものである。外殻部材312の内部空間内に配置され、図示しない支持部材によって外殻部材312との位置関係が変化しないように外殻部材312と連結されている。支持部材は、スタンド311の一部が兼ねても良い。内殻部材313は、その中心位置が外殻部材312の中心位置と一致するように配置されることが望ましい。
【0084】
ナノ粒子懸濁液314は、磁性ナノ粒子を適切な液体に均一に懸濁させたものである。ナノ粒子懸濁液314は、外殻部材312と内殻部材313との間の空間に充填されている。
【0085】
ファントム溶液315は、MR信号を出すプロトンを含む水、オイルなどから構成される液体である。ファントム溶液315は、内殻部材313の内部空間に充填されている。
【0086】
図14はマーカ320の構造を一部を破断して示す図である。なお、図13と同一部分には同一の符号を付し、その詳細な説明は省略する。
【0087】
マーカ320は、マーカ310と同様にスタンド311、外殻部材312、内殻部材313、前記ナノ粒子懸濁液314および前記ファントム溶液315を含む。マーカ320がマーカ310と異なるのは、ナノ粒子懸濁液314およびファントム溶液315が充填されている空間が互いに入れ替わっていることである。すなわち、ナノ粒子懸濁液314が内殻部材313の内部空間に充填され、ファントム溶液315が外殻部材312と内殻部材313との間の空間に充填されている。
【0088】
図15はマーカ330の構造を一部を破断して示す図である。なお、図13と同一部分には同一の符号を付し、その詳細な説明は省略する。
【0089】
マーカ330は、スタンド311、外殻部材312および混合液331を含む。
【0090】
すなわちマーカ330は、内殻部材313を有さず、外殻部材312の内部には唯一の空間が形成されている。そしてこの外殻部材312の内部空間に混合液331が充填されている。混合液331は、ナノ粒子懸濁液314およびMR信号を出すファントム溶液315を均一に混合したものである。
【0091】
かくして以上のようなマーカ310,320,330は、MRIおよびMPIのいずれにおいてもその位置を検出できる。さらにマーカ330ではもちろんのこと、マーカ310,320においても外殻部材312の中心位置と内殻部材313の中心位置とを一致させてあれば、マーカ310,320,330はMRIおよびMPIのいずれにおいても同一の位置として検出できる。なお、マーカ310,320における外殻部材312の中心位置と内殻部材313の中心位置とが一致していなくても、その位置関係は固定である。これらのマーカのMRIでの検出位置とMPIでの検出位置とのずれからそれぞれの撮影領域の歪を測ることができ、容易に補正できる。
【0092】
さて、MRIおよびMPI/MPHを複合利用する場合には、被検体200の撮影/治療領域の辺縁部にマーカ310,320,330のいずれかを複数個(座標系間の向きと尺度とを一意に対応付けするため好ましくは4個以上)配置する。撮像装置100では、高周波コイルユニット19は被検体200と一緒に移動するので、非検体撮影時に撮影領域を拡大するだけで、上記のように配置したマーカが図16に示すように写り込むことが望ましい。そのためにはマーカを図17に示すように高周波コイルユニット19の感度領域内にあって、任意の点・軸・面に対し必ず非対称の関係にある位置に配置しておく。高周波コイルユニット19と被検体200との位置関係が固定されていれば、常にMRIとMPIの両方で同一マーカを写し込むことになり、そのマーカの位置関係情報から座標系合わせができる。またMPIとMPHの座標系は原理的に同一なので、正確な位置情報に基づいた加温治療も可能となる。
【0093】
以上のように本実施形態によれば、MRIとMPI/MPHとを融合させて、例えば「MRIを使って磁性ナノ粒子を予め投与された被検体およびマーカを撮影し、次にMPIでその磁性ナノ粒子分布を精査する」、「MRIとMPIとを使って撮影し、その画像に基づいて治療計画を立て、その後MPHによる加温治療を行い、必要であれば治療効果判定のための画像をMRIで得る」といった具合に診断と治療を一連の操作として行なうことが可能となる。
【0094】
また本実施形態によれば、MRI用の静磁場の漏洩磁場をMPI/MPH用のゼロ磁場領域を形成するために利用しているため、MPI/MPH用に一対のセレクション・フィールドコイルを別途設ける場合に比べて構成を簡略化でき、装置全体をコンパクトにすることができる。
【0095】
また本実施形態によれば、MRI用の高周波コイルとMPI/MPH用の高周波コイルとの相互干渉がほとんど生じないので、MRIおよびMPI/MPHのいずれも高精度に実施することが可能である上に、コイル交換などのために操作者の作業負担が増加することもない。
【0096】
また本実施形態では、天板31を空間120aを通して空間110aへと送り込むようにしている。また本実施形態では、基台部30により天板31を三次元的に移動可能とするとともに、空間120aを、天板31の三次元的な移動に際して被検体200に干渉することがないように空間110aよりも大きくしている。このため、空間120aにおいては、被検体200を三次元的に移動させることができ、ゼロ磁場領域と被検体200との相対的な位置関係を自由に変更できる。これにより、被検体200の広範囲をMPI/MPHの対象領域とすることができる。
【0097】
また本実施形態によれば、MRIおよびMPIの双方で撮像可能なマーカ310,320,330を用いるので、MRIとMPI/MPHとを複合的に利用した診断や治療を行う場合に、MRIとMPI/MPHとでの位置合わせを高精度に行うことが可能である。
【0098】
また本実施形態では、磁性ナノ粒子が取り込まれた領域だけを加温治療できるため、MR画像に基づく手術計画で決めた加温領域でも、磁性ナノ粒子が取り込まれていなければ加温されることはない(磁性ナノ粒子分布条件)。また磁性ナノ粒子が分布していても、ゼロ磁場に存在する磁性ナノ粒子しか加温しない(局所加温条件)。従って、これら両方の条件が揃った場所しか加温治療しないという“二重安全”が自動的に確保されるというメリットもある。
【0099】
また本実施形態では、MRガントリ110とMPガントリ120との間に間隙が形成されているので、操作者や医師が、この間隙を利用して被検体200に対する何らかの処置(例えば患者モニタなど)を行うことが可能である。
【0100】
この実施形態は、次のような種々の変形実施が可能である。
【0101】
撮像装置100では、MRIとMPI/MPHとが同時に行われることはない。このため、高周波コイルユニット19は、図18に示した構造により1つの高周波コイル19dを共用する構成としても良い。
【0102】
すなわち、高周波コイルユニット19には、1つの高周波コイル19dのみを備えて、この高周波コイル19dに送信機20およびレコーディングコイル駆動部22をともに接続しておく。そして、受信機21および出力検出部23には、切り替えスイッチ33,34をそれぞれ介して高周波コイル19dを接続する。さらにスイッチ制御回路35を設ける。
【0103】
MRIを行うときにスイッチ制御回路35は、切り替えスイッチ33をオン、切り替えスイッチ34をオフとするとともに、レコーディングコイル駆動部22からの高周波電流の出力を停止させる。またMPI/MPHを行うときにスイッチ制御回路35は、切り替えスイッチ33をオフ、切り替えスイッチ34をオンとするとともに、送信機20からのRF電流パルスの出力を停止させる。
【0104】
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。
【図面の簡単な説明】
【0105】
【図1】本発明の一実施形態に係る撮像装置100の構成を示す図。
【図2】図1中のドライブ磁場コイル駆動部18、レコーディングコイル駆動部22および出力検出部23の具体的な構成例を示す図。
【図3】図1中の静磁場コイルユニット11と反発磁場コイルユニット15との関係を模式的に示す図。
【図4】図1中の静磁場コイルユニット11と反発磁場コイルユニット15とにより形成される磁場の分布を示す図。
【図5】MRIを行う場合のB0(z)の分布を示す図。
【図6】MPIを行う場合のB0(z)の分布を示す図。
【図7】MPIを行う場合の磁場勾配分布∂B0(z)/∂zを示す図。
【図8】MPHを行う場合のB0(z)の分布を示す図。
【図9】MPHを行う場合の磁場勾配分布∂B0(z)/∂zを示す図。
【図10】図1中の高周波コイルユニット19に含まれた高周波コイルの形状および配置を示す図。
【図11】寝台部の一部の構成を示す斜視図。
【図12】MPI/MPHを実施する状態を示す図。
【図13】マーカ310の構造を一部を破断して示す図。
【図14】マーカ320の構造を一部を破断して示す図。
【図15】マーカ330の構造を一部を破断して示す図。
【図16】MR画像およびMP画像におけるマーカの表れ方の一例を示す図。
【図17】マーカの配置例を示す図。
【図18】図1中の高周波コイルユニット19の変形構成例を示す図。
【図19】MPI装置の原理的な構成を示す図。
【符号の説明】
【0106】
3…レコーディングコイル、4…Xコイル、5…Yコイル、6…Zコイル、11…静磁場コイルユニット、12…静磁場電源、13…傾斜磁場コイルユニット、14…傾斜磁場電源、15…反発磁場コイルユニット、16…反発磁場電源、17…ドライブ磁場コイルユニット、18…ドライブ磁場コイル駆動部、19…高周波コイルユニット、20…送信機、21…受信機、22…レコーディングコイル駆動部、23…出力検出部、24…シーケンサ、25…ホスト計算機、26…演算ユニット、27…記憶ユニット、28…表示器、29…入力器、30…基台部、31…天板、32…ガイドレール、33,34…切り替えスイッチ、35…スイッチ制御回路、100…撮像装置、110…MRガントリ、120…MPガントリ、110a,120a…空間、200…被検体、310,320,330…マーカ、311…スタンド、312…外殻部材、313…内殻部材、314…ナノ粒子懸濁液、315…ファントム溶液、331…混合液。
【特許請求の範囲】
【請求項1】
静磁場を発生する静磁場磁石と、
前記静磁場に傾斜磁場を重畳する傾斜磁場磁石と、
前記静磁場中に配置された被検体に印加するための第1の高周波磁場を発生する第1の高周波磁場コイルと、
前記被検体から放射される磁気共鳴信号を受信する第1の受信手段と、
前記第1の受信手段により受信された前記磁気共鳴信号に基づいて前記被検体に関する画像を再構成する手段と、
前記静磁場磁石からの漏洩磁場と局所的に相殺させることによりゼロ磁場領域を形成するための反発磁場を発生する反発磁場磁石と、
前記ゼロ磁場領域に移動された前記被検体に印加するための第2の高周波磁場を発生する第2の高周波磁場コイルとを具備することを特徴とする撮像装置。
【請求項2】
前記静磁場磁石と前記反発磁場磁石とは互いに離間して配置され、前記反発磁場磁石は前記ゼロ磁場領域を前記静磁場磁石と前記反発磁場磁石との間隙に形成することを特徴とする請求項1に記載の撮像装置。
【請求項3】
前記第2の高周波磁場コイルは、前記ゼロ磁場領域にて前記被検体内の磁性微粒子を発熱させるために必要な振幅および周波数を有した前記第2の高周波磁場を発生可能であることを特徴とする請求項1に記載の撮像装置。
【請求項4】
前記第2の高周波磁場コイルは、前記ゼロ磁場領域にて前記被検体内の磁性微粒子から影響を受けるのに十分な振幅および周波数を有した前記第2の高周波磁場を発生し、
さらに、前記磁性微粒子によって影響を受けた前記第2の高周波磁場から前記磁性微粒子のみに起因する成分である磁性微粒子信号を受信する第2の受信手段と、
前記第2の受信手段により受信された前記磁性微粒子信号に基づいて前記磁性微粒子の分布に関する画像を再構成する手段とを具備することを特徴とする請求項1に記載の撮像装置。
【請求項5】
前記静磁場磁石を収容するとともに、前記静磁場磁石が発生する静磁場の方向にほぼ等しい第1の方向の少なくとも一端が開口した第1の空間を有した第1の筐体と、
前記反発磁場磁石を収容するとともに前記第1の方向の両端がいずれも開口した第2の空間を有した第2の筐体とをさらに具備し、
前記第1および第2の筐体は、前記第1の空間と前記第2の空間とが前記第1の静磁場方向に沿って直列に並ぶ状態に配置されていることを特徴とする請求項1に記載の撮像装置。
【請求項6】
被検体を前記第1および第2の空間にそれぞれ送り込むために前記被検体を搬送する搬送手段をさらに備え、
前記搬送手段は、
前記被検体を載置するための天板と、
前記第1の方向と、前記第1の方向に直交した第2の方向、ならびに前記第1の方向および前記第2の方向に対して同時に直交した第3の方向とにそれぞれ前記天板を移動可能で、かつ前記第1の方向に沿った前記天板の送り込みにおいては前記天板を前記第2の空間を通して前記第1の空間へと向けて移動させ、またはその逆方向に移動させることのできる天板移動機構と、
前記第1の空間の内部にて前記天板を支持するとともに前記天板を前記第1の方向に移動可能にするガイド機構とを具備することを特徴とする請求項5に記載の撮像装置。
【請求項7】
前記第1の空間の開口面積よりも前記第2の空間の開口面積のほうが大きいことを特徴とする請求項4に記載の撮像装置。
【請求項8】
前記第1の高周波磁場コイルおよび/または前記第1の受信手段は第1のコイルを有し、
前記第2の高周波磁場コイルおよび/または前記第2の受信手段は第2のコイルを有し、
前記第1および第2のコイルの高周波磁場方向が互いに直交配置されていることを特徴とする請求項1または請求項4に記載の撮像装置。
【請求項9】
前記第1の高周波磁場コイルおよび/または前記第1の受信手段と前記第2の高周波磁場コイルおよび/または前記第2の受信手段とは、少なくとも1つのコイルを共用することを特徴とする請求項1または請求項4に記載の撮像装置。
【請求項10】
画像間の位置合わせのために磁気共鳴作用を呈する磁気共鳴材質と磁性微粒子とを同一容器に封入したマーカを4個以上使用することを特徴とする請求項1に記載の撮像装置。
【請求項11】
前記マーカは、互いに隔離された2つの内部空間を有し、前記磁気共鳴材質と前記磁性微粒子とを前記2つの内部空間にそれぞれ収容していることを特徴とする請求項10に記載の撮像装置。
【請求項12】
前記マーカは、その内部空間に前記磁気共鳴材質と前記磁性微粒子とを混在して収容していることを特徴とする請求項10に記載の撮像装置。
【請求項1】
静磁場を発生する静磁場磁石と、
前記静磁場に傾斜磁場を重畳する傾斜磁場磁石と、
前記静磁場中に配置された被検体に印加するための第1の高周波磁場を発生する第1の高周波磁場コイルと、
前記被検体から放射される磁気共鳴信号を受信する第1の受信手段と、
前記第1の受信手段により受信された前記磁気共鳴信号に基づいて前記被検体に関する画像を再構成する手段と、
前記静磁場磁石からの漏洩磁場と局所的に相殺させることによりゼロ磁場領域を形成するための反発磁場を発生する反発磁場磁石と、
前記ゼロ磁場領域に移動された前記被検体に印加するための第2の高周波磁場を発生する第2の高周波磁場コイルとを具備することを特徴とする撮像装置。
【請求項2】
前記静磁場磁石と前記反発磁場磁石とは互いに離間して配置され、前記反発磁場磁石は前記ゼロ磁場領域を前記静磁場磁石と前記反発磁場磁石との間隙に形成することを特徴とする請求項1に記載の撮像装置。
【請求項3】
前記第2の高周波磁場コイルは、前記ゼロ磁場領域にて前記被検体内の磁性微粒子を発熱させるために必要な振幅および周波数を有した前記第2の高周波磁場を発生可能であることを特徴とする請求項1に記載の撮像装置。
【請求項4】
前記第2の高周波磁場コイルは、前記ゼロ磁場領域にて前記被検体内の磁性微粒子から影響を受けるのに十分な振幅および周波数を有した前記第2の高周波磁場を発生し、
さらに、前記磁性微粒子によって影響を受けた前記第2の高周波磁場から前記磁性微粒子のみに起因する成分である磁性微粒子信号を受信する第2の受信手段と、
前記第2の受信手段により受信された前記磁性微粒子信号に基づいて前記磁性微粒子の分布に関する画像を再構成する手段とを具備することを特徴とする請求項1に記載の撮像装置。
【請求項5】
前記静磁場磁石を収容するとともに、前記静磁場磁石が発生する静磁場の方向にほぼ等しい第1の方向の少なくとも一端が開口した第1の空間を有した第1の筐体と、
前記反発磁場磁石を収容するとともに前記第1の方向の両端がいずれも開口した第2の空間を有した第2の筐体とをさらに具備し、
前記第1および第2の筐体は、前記第1の空間と前記第2の空間とが前記第1の静磁場方向に沿って直列に並ぶ状態に配置されていることを特徴とする請求項1に記載の撮像装置。
【請求項6】
被検体を前記第1および第2の空間にそれぞれ送り込むために前記被検体を搬送する搬送手段をさらに備え、
前記搬送手段は、
前記被検体を載置するための天板と、
前記第1の方向と、前記第1の方向に直交した第2の方向、ならびに前記第1の方向および前記第2の方向に対して同時に直交した第3の方向とにそれぞれ前記天板を移動可能で、かつ前記第1の方向に沿った前記天板の送り込みにおいては前記天板を前記第2の空間を通して前記第1の空間へと向けて移動させ、またはその逆方向に移動させることのできる天板移動機構と、
前記第1の空間の内部にて前記天板を支持するとともに前記天板を前記第1の方向に移動可能にするガイド機構とを具備することを特徴とする請求項5に記載の撮像装置。
【請求項7】
前記第1の空間の開口面積よりも前記第2の空間の開口面積のほうが大きいことを特徴とする請求項4に記載の撮像装置。
【請求項8】
前記第1の高周波磁場コイルおよび/または前記第1の受信手段は第1のコイルを有し、
前記第2の高周波磁場コイルおよび/または前記第2の受信手段は第2のコイルを有し、
前記第1および第2のコイルの高周波磁場方向が互いに直交配置されていることを特徴とする請求項1または請求項4に記載の撮像装置。
【請求項9】
前記第1の高周波磁場コイルおよび/または前記第1の受信手段と前記第2の高周波磁場コイルおよび/または前記第2の受信手段とは、少なくとも1つのコイルを共用することを特徴とする請求項1または請求項4に記載の撮像装置。
【請求項10】
画像間の位置合わせのために磁気共鳴作用を呈する磁気共鳴材質と磁性微粒子とを同一容器に封入したマーカを4個以上使用することを特徴とする請求項1に記載の撮像装置。
【請求項11】
前記マーカは、互いに隔離された2つの内部空間を有し、前記磁気共鳴材質と前記磁性微粒子とを前記2つの内部空間にそれぞれ収容していることを特徴とする請求項10に記載の撮像装置。
【請求項12】
前記マーカは、その内部空間に前記磁気共鳴材質と前記磁性微粒子とを混在して収容していることを特徴とする請求項10に記載の撮像装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2009−195614(P2009−195614A)
【公開日】平成21年9月3日(2009.9.3)
【国際特許分類】
【出願番号】特願2008−43143(P2008−43143)
【出願日】平成20年2月25日(2008.2.25)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成21年9月3日(2009.9.3)
【国際特許分類】
【出願日】平成20年2月25日(2008.2.25)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]