
撮像装置
【課題】フォーカス調整の際に、レンズを所望の位置に適正に位置づけることができ、フォーカス調整の精度を向上させることができる撮像装置を提供する。
【解決手段】通常撮影時、レンズホルダ10はノーマルポジションにあり、ベース30に当接している。レンズホルダ10がマクロポジションに変位される場合、まず、長パルス信号がコイル40に印加される。これにより、レンズホルダ10は、マクロポジションの近傍位置まで変位する。続いて、短パルス信号がコイル40に複数回印加される。これにより、レンズホルダ10は、マクロポジションに徐々に近づき、やがてカバー70に当接することでマクロポジションに位置づけられる。ノーマルポジションやマクロポジションにあるレンズホルダ10は、磁石20と磁性板50との引力とシャフト60と丸孔12との摩擦力でその位置に保持される。
【解決手段】通常撮影時、レンズホルダ10はノーマルポジションにあり、ベース30に当接している。レンズホルダ10がマクロポジションに変位される場合、まず、長パルス信号がコイル40に印加される。これにより、レンズホルダ10は、マクロポジションの近傍位置まで変位する。続いて、短パルス信号がコイル40に複数回印加される。これにより、レンズホルダ10は、マクロポジションに徐々に近づき、やがてカバー70に当接することでマクロポジションに位置づけられる。ノーマルポジションやマクロポジションにあるレンズホルダ10は、磁石20と磁性板50との引力とシャフト60と丸孔12との摩擦力でその位置に保持される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、撮像装置に関するものであり、特に、小型カメラ、カメラ付き携帯電話機等に適用されて好適なものである。
【背景技術】
【0002】
カメラ付き携帯電話機の中には、ある程度離れた位置から被写体を撮影するための撮影機能の他に、近接位置から被写体を撮影するための、いわゆるマクロ撮影機能を備えるものが存在する。この場合、携帯電話機内には、通常撮影時とマクロ撮影時とでレンズ位置を切替えるための構造を備えた撮像装置が搭載される。すなわち、この構成では、レンズは、通常撮影時において第1の位置に固定され、マクロ撮影時には第1の位置よりも被写体に接近した第2の位置に固定される。このような構造を有する撮像装置の一例が、たとえば、特許文献1に記載されている。
【0003】
この撮像装置では、外枠部材内に、レンズが、その光軸方向に変位可能に支持されている。レンズは、バネによって通常撮影時の位置に付勢されている。また、外枠部材には、レンズ光軸に直交する面内において回転自在なリング状の回転部材が取り付けられている。この回転部材には磁石が配され、また、レンズ側にも磁石が配されている。ユーザが回転部材を回転させると、回転部材側の磁石がレンズ側の磁石に接近する。そして、両磁石が互いに対向する位置まで回動部材が回動されると、磁石同士の引力により、レンズが、バネによる付勢に抗して、マクロ撮影時の位置に変位する。
【特許文献1】特開2004−266340号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記の撮像装置は、ユーザが手動で回動部材を回動させて、レンズ位置をマクロ撮影時の位置に切り替えるものであるため、マクロ撮影への切り替えの際に、ユーザにおいて、煩雑な操作が必要となってしまう。これに対し、マクロ撮影への切り替えを電動にて行えるようにすれば、たとえば、ボタン操作等の簡便な操作をもって、レンズをマクロ撮影時の位置へと変位させることができる。また、被写体と撮像装置との距離に応じて自動的に、レンズ位置を切り替えることもでき、ユーザの利便性を向上させることができる。
【0005】
ところで、マクロ撮影機能を有する撮像装置では、マクロ撮影と通常の撮影を円滑に行うために、レンズをマクロ撮影時の位置(以下、「マクロポジション」という)と通常撮影時の位置(以下、「ノーマルポジション」という)に適正に位置づける必要がある。すなわち、レンズがノーマルポジションあるいはマクロポジションからずれると、イメージセンサ(たとえば、CCD:Charge Coupled Device)に対するフォーカスずれが生じ、被写体の撮像画像にぼけが生じてしまう。したがって、上記のようにレンズを電気的に駆動する構成の場合にも、レンズをマクロポジションとノーマルポジションに適正に位置づけるための構成が要求される。
【0006】
一方、撮像装置の中には、上記のようにレンズをノーマルポジションまたはマクロポジションに固定せずに、適宜、レンズを適正なフォーカス位置(オンフォーカス位置)に引き込む、いわゆるオートフォーカス機能を備えるものが存在する。この場合、オートフォーカスのための機構の一つとして、磁石とコイルとに生じる電磁力によってレンズを駆動する構成が考えられる。
【0007】
この構成では、たとえば、以下のようにして、レンズがオンフォーカス位置に位置づけられる。すなわち、オートフォーカス動作が開始されると、予め定められた回数のパルス電流信号がコイルに印加され、レンズが、ホームポジションからレンズ光軸方向に徐々に変位される。1回のパルス電流信号によってレンズが変位する度に、イメージセンサからの信号をもとに、レンズが捕らえた画像のコントラスト値が検出される。コントラスト値の検出は、必要な回数のパルス電流信号の印加によって、レンズがホームポジションからフォーカス調整領域の終端位置に到達するまで繰り返される。このとき、コントラスト値は、レンズがオンフォーカス位置にあるときに最大となる。その後、何回目のパルス電流信号によってコントラスト値が最大となったかが抽出され、一旦、レンズがホームポジションに戻された後、抽出された回数分のパルス電流信号によってレンズが再び変位される。これにより、レンズが、コントラスト値が最大となった位置、すなわちオンフォーカス位置に位置づけられる。
【0008】
このような構成では、ホームポジションがフォーカス引き込みの際の基準位置となる。このため、レンズがホームポジションに適正に位置づけられないと、オンフォーカス位置に狂いが生じる惧れがある。したがって、このようなオートフォーカス機構を備えた撮像装置においても、レンズをホームポジションに適正に位置づけるための構成が求められる。
【0009】
本発明は、このような課題を達成するためになされたものであり、通常撮影時、マクロ撮影時、あるいは、フォーカス調整時に、電動にてレンズを所望の位置に適正に位置づけることができ、これにより、利便性の向上と、撮影精度の向上を同時に実現することができる撮像装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明の第1の態様に係る撮像装置は、レンズを保持するホルダと、前記ホルダを前記レンズの光軸方向に変位可能に支持する支持部と、前記支持部に設けられ、前記ホルダが基準位置に位置づけられたときに当該ホルダに当接する当接部と、前記ホルダと前記支持部の何れか一方に配された磁石と、前記磁石に対向するよう配置され、電流が印加されることにより前記磁石と相俟って前記ホルダに電磁駆動力を生じせしめるコイルと、前記コイルへの給電が停止されたとき、前記磁石との間の磁力によって前記ホルダを給電停止後の位置に保持させるための磁性部材と、前記コイルに電流信号を印加して前記ホルダを駆動制御する制御部とを備え、前記制御部は、前記ホルダを前記基準位置まで変位させる際、前記コイルに対して、第1のパルス電流信号を印加した後、当該第1のパルス電流信号より印加時間が短い第2のパルス電流信号を複数回印加することを特徴する。
【0011】
この態様では、ホルダが基準位置に変位される際には、まず、第1のパルス電流信号がコイルに印加される。これにより、ホルダは基準位置の近傍位置まで変位する。続いて、第2のパルス電流信号がコイルに複数回印加される。これにより、ホルダは、基準位置に徐々に近づき、やがて当接部に当接することで基準位置に到達する。その後、基準位置に位置づけられたホルダは、磁石と磁性部材の間に生じる磁力によってその位置に保持される。
【0012】
本発明の第2の態様は、第1の態様に係る撮像装置において、前記撮像装置の姿勢に応じた検出信号を出力する姿勢検出部を備え、前記制御部は、前記姿勢検出部からの検出信号に応じて、少なくとも前記第1のパルス電流信号の印加時間を調整することを特徴とする。
【0013】
この態様では、姿勢検出部を、たとえば、加速度センサで構成することができる。この場合、加速度センサからの加速度信号をもとに、撮像装置に対しどの方向に重力加速度が生じているかが検出され、その検出結果をもとに、撮像装置の姿勢が判断される。そして、基準位置が現在のホルダの位置よりも鉛直上方にあるなど、ホルダを動かしくい状態にあるときには、第1のパルス電流信号の印加時間が長くされ、反対に、基準位置が現在のホルダの位置よりも鉛直下方にあるなど、ホルダを動かしやすい状態にあるときには、第1のパルス電流信号の印加時間が短くされる。
【0014】
なお、第1のパルス電流信号に加え、第2のパルス電流信号の印加時間を撮像装置の姿勢に応じて調整することもできる。
【0015】
本発明の第3の態様は、第1または第2の態様に係る撮像装置において、複数回印加される前記第2のパルス電流信号を、後の回数になるに従って段階的に印加時間が短くなるように構成したことを特徴とする。
【0016】
本発明の第4の態様は、第1ないし第3の何れかの態様に係る撮像装置において、前記磁石と前記磁性部材は、互いに対向するよう、前記ホルダと前記支持部にそれぞれ配置され、前記磁性部材の前記光軸方向の長さを、前記磁石の前記光軸方向の長さよりも長くしたことを特徴とする。
【発明の効果】
【0017】
本発明の第1の態様によれば、第1のパルス信号によってレンズを基準位置に大きく接近させ、その後、第2のパルス信号によってレンズを基準位置に徐々に接近させるため、レンズを基準位置に迅速かつ効率的に位置づけることができる。加えて、第1の態様によれば、基準位置の手前から第2のパルス電流信号によって徐々にホルダが変位されるため、基準位置に到達したときに、ホルダが当接部に強く当たることがない。したがって、ホルダが、当接部に当った反動で、基準位置から離れてしまうようなことが起こりにくく、基準位置からのレンズの位置ずれを防止することができる。また、ホルダが当接部に当たったときの衝突音も低減される。
【0018】
したがって第1の態様によれば、通常撮影時、マクロ撮影時、あるいは、フォーカス調整時に、レンズを基準位置(ノーマルポジション/ホームポジション/マクロポジション)に適正に位置づけることができ、これにより、撮影精度を向上させることができる。
【0019】
本発明の第2の態様によれば、撮像装置の姿勢に応じて、第1のパルス電流信号の印加時間が調整されるため、印加時間が一定である場合に比べて、効率的にレンズを基準位置に位置づけることができ、その結果的として、消費電力の低減を図ることができる。
【0020】
本発明の第3の態様によれば、ホルダが基準位置から離れているときは、第2のパルス信号によってホルダが大きく変位され、ホルダが基準位置に接近するに従って、第2のパルス信号によるホルダの変位量が小さくなるので、第1のパルス信号によって変位された後の位置から基準位置までの区間において、ホルダを効率的に変位させることができる。よって、基準位置に対するホルダの到達時間を短縮でき、また、ホルダを基準位置にスムーズに位置付けることができる。
【0021】
本発明の第4の態様によれば、磁石と磁性部材との間に働くレンズ光軸に直交する方向の磁力を利用してホルダを保持することができる。また、レンズ光軸方向、すなわちホルダの変位方向において、磁性部材の長さが磁石の長さより長くなっているので、ホルダが変位する範囲内において、ホルダを保持するための磁力を、ホルダに安定して付与することができる。したがって、コイルへの給電を停止した後の位置に、ホルダを安定して保持することができる。
【0022】
本発明の効果ないし意義は、以下に示す実施の形態の説明により更に明らかとなろう。ただし、以下の実施の形態は、あくまでも、本発明を実施化する際の一つの例示であって、本発明は、以下の実施の形態に記載されたものに何ら制限されるものではない。
【発明を実施するための最良の形態】
【0023】
以下、本発明の実施の形態について、図面を参照して説明する。本実施の形態に係る撮像装置は、オートフォーカス機能を備えない撮像装置に本発明を適用したものである。すなわち、本実施の形態では、レンズの位置が、通常撮影を行うときの位置(ノーマルポジション)とマクロ撮影を行うときの位置(マクロポジション)の2つの位置に切り替え固定される。ここで、撮像装置には、レンズ位置をノーマルポジションとマクロポジションに切り替え可能な、いわゆるマクロ切替え用のレンズ駆動装置が含まれている。
【0024】
図1は、実施の形態に係るレンズ駆動装置の分解斜視図である。図2は、アセンブルした後のレンズ駆動装置の構成を示す図である。同図(a)はアセンブルが完成した図であり、同図(b)は、同図(a)に示すレンズ駆動装置の内部状態が分かるように、カバー70を取り外した状態を示す図である。
【0025】
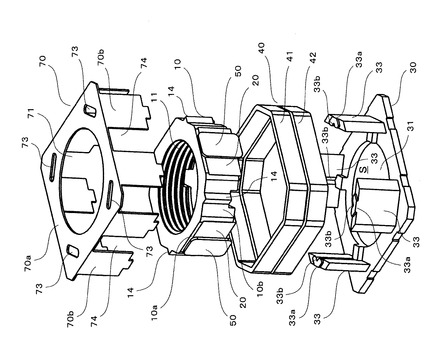
10はレンズホルダである。レンズホルダ10は、平面視で八角形状を有する。レンズホルダ10には、その中央位置に、レンズを収容するための円形の開口11が形成されている。レンズホルダ10の8つの側面は、開口11に装着されたレンズの光軸に対して対称となるように配置されている。これら8つの側面は、幅が広い4つの側面10aと幅が狭い4つの側面10bからなる。側面10aと側面10bは、レンズホルダ10において、交互に配されている。
【0026】
さらに、レンズホルダ10には、2本のシャフト60、61にそれぞれ係合する丸孔12と長孔13が形成されている(図4参照)。また、レンズホルダ10における幅の広い4つの側面10aのうち、1つの側面10aとこの側面10aに垂直な1つの側面10aには、それぞれ磁石20が装着されている。これら2つの磁石20は、片面にNとSが着磁された2極配置構造となっている。また、各磁石20のサイズおよび磁気強度は互いに等しくなっている。
【0027】
30はベースである。ベース30は、ほぼ方形の板状に形成されている。ベース30には、レンズを透過した光をイメージセンサへと導くための開口31が形成され、さらに、シャフト60、61を挿入するための2つの孔32が形成されている。なお、図1では1つの孔32のみが図示されている。
【0028】
また、ベース30には、開口31の周囲に4つのガイド体33が突設されている。これらガイド体33の先端部には、それぞれ凸部33aが形成されている。なお、4つのガイド体33に囲まれた空間がレンズホルダ10の収容空間Sとなる。
【0029】
40はコイルである。コイル40は、4つのガイド体33の外周に巻回される。コイル40は、第1のコイル41と第2のコイル42とからなる。第1のコイル41と第2のコイル42は、直列接続されているとともに、その巻き方向が逆にされている。このため、第1のコイル41と第2のコイル42は、電流が流れる方向が反対になる。
【0030】
50は磁性材料からなる2つの磁性板である。これら磁性板50は、レンズ駆動装置がアセンブルされた際、コイル40の外周に配され、コイル40の内周に配される2つの磁石20のそれぞれに対向する。
【0031】
60、61はシャフトである。これらシャフト60、61は、それぞれ、断面が円形で、レンズホルダ10側の丸孔12および長孔13の内径よりもやや小さい径を有している。なお、シャフト60、61は、磁性材料、非磁性材料のどちらで形成されてもよい。
【0032】
70はカバーである。カバー70は、ほぼ方形の上面板70aと上面板の周縁から垂下する4つの側面板70bとで構成されている。上面板70aには、レンズに光を取り込むための開口71が形成されている。また、上面板70aには、シャフト60、61が挿入される2つの孔72と、ガイド体33の凸部33aが挿入される4つの長孔73が形成されている。
【0033】
カバー70の4つの側面板70bには、切欠き部74が形成されている。この切欠き部74は、カバー70をベース30に被せたときに、磁性板50を逃がすために形成されたものである。なお、切欠き部74は、4つの側面板70の全てに形成されている。これは、後述するように、レンズホルダ10の4つの側面10a全てに磁石20が配され、これら4つ磁石20に対応して4つの磁性板50が配された場合にも対応できるようにするためである。
【0034】
アセンブル時には、磁性板50をコイル40の外周面に接着剤等によって装着し、磁性板50が装着されたコイル40をベース30に配する。次に、2本のシャフト60、61をレンズホルダ10の丸孔12および長孔13に挿入し、シャフト60、61が挿入されたレンズホルダ10を上方からベースの収容空間Sに収容する。このとき、レンズホルダ10を貫通したシャフト60、61の下端がベース30の孔に挿入され、固着される。この状態において、2つの磁石20は、コイル40に所定の隙間を有する状態で対向する。また、レンズホルダ10の4つの側面10bが、ガイド体33の側面に近接する。なお、図示が省略されているが、レンズホルダ10の開口11には、前もってレンズが装着されている。
【0035】
最後に、カバー70を、2つの孔72が2本のシャフト60、61の上端に挿入され、4つの長孔73が凸部33aに挿入されるように、上方からベース30に装着する。これにより、レンズホルダ10が、シャフト60、61に沿って変位可能な状態で、ベース30とカバー70に取り付けられる。こうして、図2(a)に示すような状態でアセンブルが完了する。
【0036】
アセンブルされた状態において、磁石20のN極は、上側の第1のコイル41に対向し、磁石20のS極は、下側の第2のコイル42に対向する。したがって、第1のコイル41および第2のコイル42に電流信号が印加されると、磁石20に電磁駆動力が作用し、レンズホルダ10は、シャフト60、61に沿って摺動する。
【0037】
図3は、レンズ駆動装置の駆動動作を説明する図である。なお、同図は、図2(a)のA−A’断面図である。
【0038】
同図(a)は、レンズホルダ10がノーマルポジションにあるときの状態を示す図である。このノーマルポジションは、通常撮影時のときのレンズの位置となる。ノーマルポジションにあるとき、レンズホルダ10の下端は、ベース30に当接した状態となる。上記のように、第1のコイル41と第2のコイル42にそれぞれ磁石20のNとSの着磁領域がそれぞれ対向する。また、第1のコイル41と第2のコイル42は、電流が流れる方向が反対になる。
【0039】
ノーマルポジションにある状態から、第1のコイル41および第2のコイル42に同図(a)に示す方向の電流が流れると、磁石20に上方向の推進力が作用し、レンズホルダ10は、シャフト60、61に沿って、ノーマルポジションから上方向に変位し、同図(b)に示すマクロポジションに到達する。マクロポジションは、マクロ撮影時のレンズの位置となる。マクロポジションにあるとき、レンズホルダ10の上端は、カバー70に当接した状態となる。
【0040】
同図(b)に示すマクロポジションの状態から、第1のコイル41および第2のコイル42に同図(a)の場合と反対方向に電流が流れると、磁石20に下方向の推進力が作用し、レンズホルダ10は、シャフト60、61に沿って、下方向に変位し、ノーマルポジションに戻ってくる。なお、図中、円に黒点のマークは図面参照者に向かってくる方向を示し、円にバツのマークは図面参照者から遠ざかる方向を示す。
【0041】
このようにして、レンズホルダ10が上方向と下方向に変位することで、レンズの位置がノーマルポジションとマクロポジションとの間で切り替わる。
【0042】
上述のように、ノーマルポジションは、レンズホルダ10の下端(一端)がベース30に当接する位置に設定されており、マクロポジションは、レンズホルダ10の上端(他端)がカバー70に当接する位置に設定されている。このような構成であれば、レンズホルダ10を、ベース30に当接させることでノーマルポジションに位置づけることができ、カバー70に当接させることで、マクロポジションに位置づけることができる。このため、レンズホルダ10の位置が検出されなくても、レンズホルダ10を適正な位置に位置づけしやすくなる。
【0043】
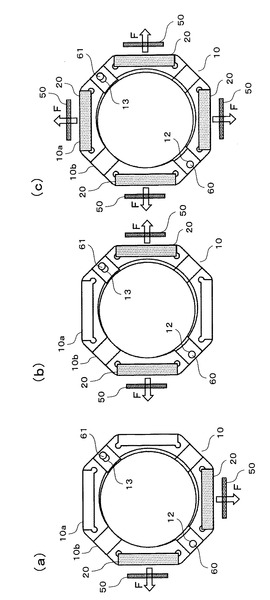
さて、アセンブルされた状態において、レンズホルダ10は、図4(a)に示すように、2つの磁石20とそれに対向する2つの磁性板50との間に生じる磁力によって、互いに直交する2方向から引力Fを受ける。また、これら引力Fでレンズホルダ10が外周方向に引かれることにより、シャフト60が孔12におけるホルダ中心側の内壁面に強く押し付けられ、これらの間に比較的大きな摩擦力が生じる。このため、レンズホルダ10がマクロポジションやノーマルポジションにあるときに、コイル40へ給電しておかなくても、上記の引力Fと摩擦力とによって、レンズホルダ10がその位置に保持される。
【0044】
なお、図4(b)に示すように、レンズホルダ10において、対向する2つの側面10aに磁石20を配し、それら磁石20に対向するように磁性板50を配することもできる。
【0045】
このような構成とした場合、磁石20と磁性板50との間に生じる磁力によって、レンズホルダ10は相反する2方向から引力Fを受ける。これら2つの引力Fによって、レンズホルダ10は、相反する2方向から吊られたような状態となる。このため、レンズホルダ10を鉛直方向に動かす場合にも、重力の影響を受けにくくなり、下向き駆動時と上向き駆動時の間の駆動差(動き出しの速さや駆動レスポンスなど)が出にくくなる。よって、レンズホルダ10を鉛直方向に移動させる状態にてレンズ駆動装置が使用された場合であっても、レンズホルダ10の駆動を円滑に行うことができる。また、レンズホルダ10がマクロポジションやノーマルポジションにあるときに、コイル40へ給電しておかなくても、上記の2つの引力Fによって、レンズホルダ10がその位置に保持される。
【0046】
さらに、図4(c)に示すように、4つの側面10aに磁石20を配し、それら磁石20に対向するように磁性板50を配するようにしても良い。このような構成とすれば、レンズホルダ10が、引力Fによって4方向から吊られた状態となり、より安定して吊られた状態となるので、より重力の影響がなくなって上記駆動差が出にくくなる。また、レンズホルダ10に対する保持力も大きくなる。
【0047】
また、図3に示すように、磁性板50は、レンズの光軸方向の長さL1が、磁石20におけるレンズの光軸方向の長さL2よりも長くなるよう、ベース30とカバー70の間の距離と同じにされている。これにより、レンズホルダ10が変位する範囲内において、磁石20と磁性板50による引力Fをレンズホルダ10に安定して付与することができ、レンズホルダ10を安定して保持することができる。
【0048】
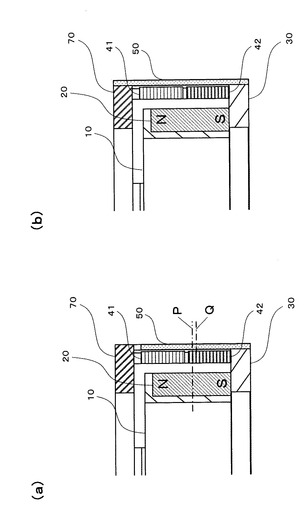
磁性板50は、図5(a)、(b)に示す構成に変更することができる。同図(a)の構成では、磁性板50におけるベース30側の端部が、ベース30の外底面まで延ばされている。これにより、レンズホルダ10がノーマルポジションにある状態において、磁性板50の中心Qが、磁石20の中心Pよりもベース30側に位置している。
【0049】
磁性板50の長さL1が磁石20の長さL2に対してあまり長くない場合には、磁石20は磁性板50の中心に向かって引き付けられる。よって、この場合、磁石20は磁性板50の中心Qに向かって引き付けられ、これによって、レンズホルダ10は、磁性板50側へ引き付けられるとともに、ベース30側へも引き付けられる。レンズホルダ10は、通常、ノーマルポジションにあることが多いが、このような構成とすれば、レンズホルダ10を、ノーマルポジションに安定して保持することができる。
【0050】
図5(b)の構成では、磁性板50におけるベース30側の端部が、ベース30の外底面まで延ばされているとともに、カバー70側の端部が、カバー70の外天面まで延ばされている。すなわち、磁性板50の長さL1が、磁石20の長さL2に比べて、極力長くされている。
【0051】
このように磁性板50の長さL1と磁石20の長L2との差が大きくなってくると、上述したような、磁石20が磁性板50の中心Qに向かって引かれる力、すなわちレンズの光軸方向(変位方向)に作用する引力が小さくなる。したがって、このような構成とすれば、レンズホルダ10が変位する際、変位方向に引力の影響を受けにくくなる。よって、レンズホルダ10を円滑に駆動することができる。
【0052】
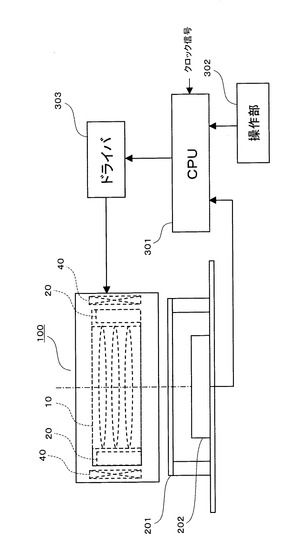
図6は、本実施の形態に係る撮像装置の概略構成を示す図である。撮像装置は、たとえば、小型カメラやカメラ付き携帯電話機に搭載される。
【0053】
レンズ駆動装置100のベース30側には、フィルタ201と、イメージセンサユニット202が配されている。イメージセンサユニット202からは、CPU301に対し、ピントが合っているか否かを判断するための指標となるコントラスト信号が出力される。
【0054】
イメージセンサユニット202には、ISP(Image Signal Processor)が内蔵されており、イメージセンサユニット202が捕らえた画像における1画素毎のコントラスト値が、このISP内で積分される。これにより、画像の総合的なコントラスト値が算出され、これがコントラスト信号として出力される。被写体にピントが合っているほど、画像がくっきりするため、コントラスト値は高くなる。
【0055】
また、CPU301には、操作部302からレンズの位置の切替えを指示するための信号が出力される。操作部302は、操作ボタンなどで構成されている。ユーザによってレンズをマクロポジションへ切替える操作が行われると、操作部302からマクロポジションへの切替えを指示する信号が出力される。また、ユーザによってレンズをノーマルポジションに切替える操作が行われると、操作部302からノーマルポジションへの切替えを指示する信号が出力される。なお、レンズをマクロポジションとノーマルポジションに切り替えるための操作ボタンは、カメラ撮影時に操作しやすい位置に割り当てられているのが望ましい。
【0056】
CPU301は、レンズホルダ10がノーマルポジションの位置にあるときに、操作部302からマクロポジションへの切替え指示があると、レンズホルダ10をマクロポジションへ変位させるための制御信号をドライバ303に出力する。また、CPU301は、イメージセンサユニット202から入力されたコントラスト値が、所定の閾値よりも低いか否かを判断する。そして、コントラスト値が閾値よりも小さいときには、被写体との距離が近いためにピントが合っていないと判断して、レンズホルダ10をマクロポジションへ変位させるための制御信号をドライバ303に出力する。
【0057】
ドライバ303は、CPUからの制御信号に従って、レンズ駆動装置100のコイル40に電流信号を印加する。これにより、レンズホルダ10が、図3の如く、マクロポジションへ変位する。
【0058】
一方、CPU301は、レンズホルダ10がマクロポジションの位置にあるときに、ノーマルポジションへの切替え指示があると、あるいは、ピントが合っていないと判断すると、レンズホルダ10をノーマルポジションへ変位させるための制御信号をドライバ303に出力する。ドライバ303は、この制御信号に従って、コイル40に電流信号を印加する。これにより、レンズホルダ10が、図3の如く、ノーマルポジションへ変位する。
【0059】
なお、イメージセンサユニット202で捕らえられた画像が色彩の変化が小さい画像である場合にも、ピントが合っていない場合と同様に、コントラスト値が小さくなる。したがって、色彩の変化が小さい画像である場合にも、ピントがあっていないと判断されて、レンズの位置が切り替えられる惧れがある。この場合、レンズの位置が切り替えられ、これによってピントが合えば、コントラスト値が大きくなる。しかし、色彩の変化が小さい画像の場合には、レンズの位置が切り替えられても、コントラスト値が低いままとなる。そこで、レンズの位置が切り替わってもコントラスト値が閾値より大きくならなければ、コントラスト値が小さかった原因はピントではないと判断して、レンズホルダ10を元の位置に戻すような構成とすることができる。このようにすれば、誤検出が生じたとしても、それに円滑に対応することができる。
【0060】
また、上記のように、ピントが合っているか否かを判断することにより、被写体と撮像装置との距離(撮影距離)に対してレンズの位置が適正であるか否を判断することもできるが、撮影距離を実際に測定することによって、レンズの位置が適正であるか否を判断することもできる。この場合、たとえば、赤外線レーザを用いた距離センサを撮像装置に搭載することができる。
【0061】
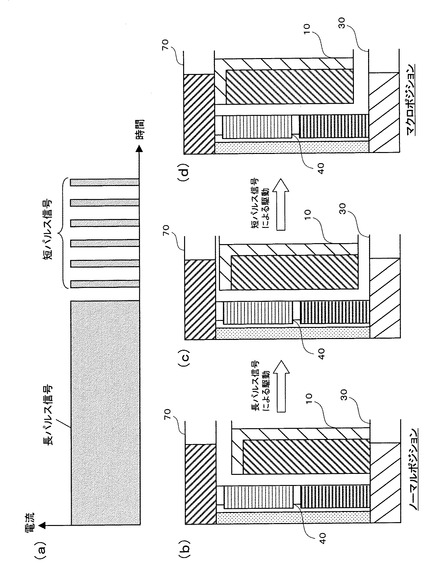
図7は、レンズ駆動装置の駆動制御について説明する図である。同図(a)は、ドライバ303からコイル40に印加されるパルス電流信号の波形図であり、同図(b)は、同図(a)のパルス電流信号によって駆動したときのレンズホルダ10の動きを示す図である。なお、図6は、レンズホルダ10をノーマルポジションからマクロポジションへ変位させる場合の例を示すものであるが、レンズホルダ10をマクロポジションからノーマルポジションヘ変位させる場合も同様な駆動制御が行われる。
【0062】
レンズホルダ10を駆動するために、ドライバ303からは、図7(a)に示すパルス電流信号がコイル40に印加される。すなわち、最初に、印加時間の長いパルス電流信号(以下、「長パルス信号」という)がコイルに1回印加され、続いて、印加時間の短いパルス電流信号(以下、「短パルス信号」)が複数回コイルに印加される。なお、ここでは、短パルス信号の長さ(印加時間)が全て同じに設定されている。
【0063】
CPU301には、図6に示すように、パルス電流信号を生成するためのクロック信号が入力される。CPU301は、内部のカウンタによって、クロック信号をカウントし、カウント結果に応じて、長パルス信号と短パルス信号のON/OFF制御を行う。
【0064】
すなわち、CPU301は、まず、ON信号をドライバ203に出力して、ドライバ203から長パルス信号を出力させる。このとき同時に、CPU301は、クロック信号のカウントを開始し、そのカウント値が長パルス信号の印加時間に相当するクロック数に達するまでの間、ドライバ303にON信号を出力し続ける。そして、カウント値が長パルス信号の印加時間に相当するクロック数に達すると、CPU301は、ドライバ203にOFF信号を出力し、長パルス信号の出力を停止させる。その後、さらに、停止時間に相当する個数のクロック信号をカウントすると、CPU301は、再びON信号をドライバ203に出力して、ドライバ203から短パルス信号を出力させる。そして、クロック信号のカウント値が短パルス信号の印加時間に相当するクロック数に達すると、CPU301は、ドライバ203にOFF信号を出力し、短パルス信号の出力を停止させる。さらに、停止時間に相当するクロック数をカウントすると、CPU301は、再度、短パルス信号の印加時間に相当するクロック数をカウントするまでの間、ドライバ303にON信号を出力する。その後、CPU301は、短パルス信号を出力させるためのON/OFF信号を、短パルス信号の出力回数だけ繰り返して、ドライバ303に出力する。
【0065】
ドライバ303は、CPU301からON信号が入力されると電流信号を出力し、OFF信号が入力されると電流信号をOFFする。こうして、ドライバ303からは、上述した、パルス電流信号の波形が出力されることになる。
【0066】
なお、本実施の形態では、ノーマルポジションからマクロポジションへのレンズホルダ10の変位量は、たとえば、0.1〜0.3mm程度に設定されている。そして、このような変位量に対し、長パルス信号の印加時間は、たとえば、数十〜数百mm秒程度に設定され、短パルス信号の印加時間は、たとえば、数十〜数百μ秒程度に設定されている。また、短パルス信号の印加回数は、たとえば、6回に設定されている。但し、これら印加時間や印加回数は、レンズホルダ10の変位量やその他の条件に応じて、予め試験などにより、適宜決められるものである。
【0067】
レンズホルダ10には、パルス電流信号の印加時間に応じた推進力(コイル40と磁石20による電磁駆動力)が付与され、レンズホルダ10は、その推進力に応じた距離だけ変位する。コイル40に長パルス信号が印加されると、これによる推進力によって、レンズホルダ10は、図7(b)に示すノーマルポジションからマクロポジション側に変位し、マクロポジションよりも少し手前の、図7(c)に示す位置で停止する。その後、コイル40に短パルス信号が複数回印加されると、これによる推進力によって、レンズホルダ10は、図7(c)の位置から、少しずつ、図7(d)に示すマクロポジション側に移動し、カバー70に当接することによってマクロポジションに位置づけられる。
【0068】
図8は、短パルス信号による駆動時のレンズホルダ10の動きの一例を模式的に示す図である。なお、同図(a)は、重力に抗してレンズホルダ10が駆動されるときの状態を示し、同図(b)は、重力に沿ってレンズホルダ10が駆動されるときの状態を示す。また、図中の一点鎖線は、1回の短パルス信号が印加された後のレンズホルダ10の停止位置を示している。
【0069】
図示の如く、レンズホルダ10は、短パルス信号が印加される度に少しずつカバー70側に移動する。そして、短パルス信号が複数回印加される間にカバー70に当接すると、そこで停止する。
【0070】
このとき、レンズ駆動装置100の姿勢の違いによって、短パルス信号によって同じ推進力が付与されても、レンズホルダ10の変位量が異なってくる。レンズが水平から上を向くような姿勢にレンズ駆動装置100があるとき、すなわち、マクロポジションがノーマルポジションよりも鉛直上方に位置するときには、レンズホルダ10を重力に抗して変位させなければならないので、図8(a)に示すように、1回の短パルス信号によるレンズホルダ10の変位量d1が小さくなる。また、このように重力に抗してレンズホルダ10を駆動する場合には、長パルス信号を印加した際のレンズホルダ10変位量も小さいため、長パルス信号印加後のレンズホルダ10の停止位置、すなわち、短パルス信号印加開始時におけるレンズホルダ10の位置は、カバー70から大きく後退し、レンズホルダ10からカバー70(マクロポジション)までの距離G1が大きくなる。このため、重力に抗してレンズホルダ10を駆動する場合には、同図(a)に示す如く、レンズホルダ10がマクロポジションに到達するまでの短パルス信号の印加回数が多くなる。
【0071】
一方、レンズが水平から下を向くような姿勢にレンズ駆動装置100があるとき、すなわち、マクロポジションがノーマルポジションよりも鉛直下方に位置するときには、レンズホルダ10を重力に沿って変位させることになるので、図8(b)に示すように、短パルス信号による1回当りのレンズホルダ10の変位量d2が大きくなり、また、長パルス信号印加後のレンズホルダ10の停止位置からカバー70(マクロポジション)までの距離G2が小さくなる。このため、レンズホルダ10がマクロポジションに到達するまでの短パルス信号の印加回数が少なくなる。
【0072】
長パルス信号の時間幅と短パルス信号の印加回数は、これら重力などの影響により、レンズホルダ10が最も変位しにくい状況下であっても、レンズホルダ10がマクロポジションに到達できる時間幅と印加回数に予め調整されている。なお、このように設定すると、通常は、短パルス信号の印加回数が設定回数に達するよりも前に、レンズホルダ10がノーマルポジションに到達し、その後も残りの短パルス信号が印加され続けることになる。しかし、このように残りの短パルス信号が印加されても、レンズホルダ10は、これら残りの短パルス信号による推進力によって、カバー70に押さえつけられ続けるだけであるため、レンズホルダ10をマクロポジションに位置づけるにおいて、これら残りの短パルス信号が悪影響を及ぼすことはない。
【0073】
また、レンズホルダ10は、短パルス信号による推進力によって、マクロポジションの近傍位置から少しずつ変位してカバー70に当接する。よって、レンズホルダ10がカバー70に強く当たることがないので、耳障りとなる衝突音が発生することもない。また、レンズホルダ10が、カバー70に当たった反動で、カバー70から離れてしまうようなことも起こりにくく、適正な位置からのレンズの位置ずれも防止される。
【0074】
なお、カバー70に当たった反動でレンズホルダ10がカバー70から離れたとしても、その後、残りの短パルス信号によってレンズホルダー10がカバー70に押し付けられるため、レンズホルダー10はマクロポジションに当接する位置に位置付けられる。
【0075】
なお、マクロポジションへのレンズの切替え時間を少しでも短くするには、長パルス信号の印加時間を長くし、長パルス信号によってできるだけマクロポジションに近い位置までレンズホルダ10を変位させるようにすれば良い。ただし、このようにした場合、マクロポジションがノーマルポジションよりも鉛直下方に位置する場合など、レンズ駆動装置100の姿勢によっては、長パルス信号による推進力のみで、レンズホルダ10がマクロポジションまで到達してカバー70に当り、その反動でレンズホルダ10がカバー70から離れてしまう惧れがある(たとえば、図7(c)と同様の状態)。しかし、このような場合であっても、その後、短パルス信号が印加されることにより、その推進力でレンズホルダ10がマクロポジションまで到達するため、適正位置からのレンズの位置ずれが防止される。
【0076】
また、レンズホルダ10を駆動するためのパルス電流信号の波形は、図9の波形図に示すものに変更することができる。この変更例では、短パルス信号の幅(印加時間)が印加回数に伴って徐々に短くされる。この場合、短パルス信号が印加される周期は同じとされ、前半の短パルス信号ほど、印加時間が長く停止時間が短くされる。
【0077】
このような構成とすれば、マクロポジションから離れている間の短パルス信号よる推進力を大きくできるので、長パルス信号の印加によって停止した位置からマクロポジションまでのレンズホルダ10の到達時間を短縮できる。また、マクロポジションに接近した後の推進力を小さくできるので、レンズホルダ10をマクロポジションにソフトランディングさせることができる。
【0078】
なお、図9の例では、印加回数が一つ増えるに応じて短パルス信号の幅が小さくなるよう図示したが、たとえば、n回の印加回数毎に、短パルス信号の幅を小さくするようにしても良い。
【0079】
上記実施の形態では、ノーマルポジションからマクロポジションにレンズホルダ10を変位させることを例に挙げて説明を行ったが、マクロポジションからノーマルポジションにレンズホルダ10を変位させる場合にも、上記と同様の制御を行うことにより、レンズホルダ10をノーマルポジションに円滑かつ適正に位置づけることができる。ただし、マクロポジションからノーマルポジションにレンズホルダ10を変位させる場合は、ノーマルポジションからマクロポジションにレンズホルダ10を変位させる場合に比べ、レンズホルダ10の変位方向が逆であるため、図7(a)および図9に示す長パルス信号と短パルス信号は、極性を反転させて、コイル40に印加する必要がある。
【0080】
本実施の形態によれば、ノーマルポジションとマクロポジションの間のレンズの位置の切替えが電動で行えるので、ユーザによる替え操作だけでなく、たとえば、撮影距離に対してレンズの位置が適正であるか否かを検出することにより、自動でレンズの位置を切り替えることが可能となる。
【0081】
また、本実施の形態によれば、レンズホルダ10を、ベース30に当接させるだけでノーマルポジションに位置づけることができ、カバー70に当接させるだけでマクロポジションに位置づけることができるので、レンズホルダ10を容易に適正な位置に位置づけることができる。
【0082】
さらに、本実施の形態によれば、レンズホルダ10を、マクロポジションやノーマルポジションの手前の位置から短パルス信号によって徐々に変位させ、これらポジションに到達させることができるため、レンズホルダ10が、カバー70やベース30に強く当たることがなく、よって、レンズホルダ10が、カバー70やベース30に当たった反動で、カバー70やベース30から離れてしまうようなことが起こりにくく、また、耳障りとなる衝突音が発生することもない。
【0083】
さらに、本実施の形態によれば、磁石20と磁性板50との間に働く引力Fを利用して、レンズホルダ10をマクロポジションやノーマルポジションに保持するようにしているので、コイル40へ給電しておかなくても、レンズホルダ10をこれらのポジションに位置づけておくことができ、消費電力を低減することができる。
【0084】
以上、本発明の実施形態について説明したが、本発明はこれに限定されるものではなく、また、本発明の実施形態も、上記以外に種々の変更が可能である。
【0085】
<レンズ駆動装置の変更例>
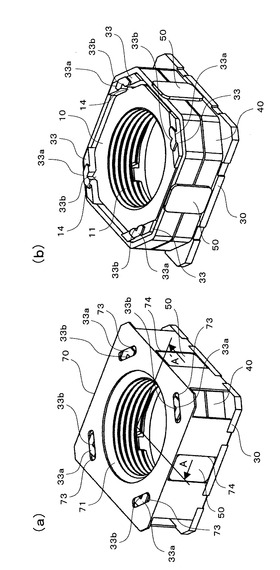
図10は、他の実施の形態に係るレンズ駆動装置の分解斜視図である。図11は、アセンブルした後のレンズ駆動装置の構成を示す図である。同図(a)はアセンブルが完成した図であり、同図(b)は、同図(a)に示すレンズ駆動装置の内部状態が分かるように、カバー70を取り外した状態を示す図である。
【0086】
本実施の形態では、レンズホルダ10を移動させる際のガイド構造が、シャフト60、61と丸孔12、長孔13による構成ではなく、以下の通り、突条14と溝33bによる構成とされている。これら図10および図11に図示したその他の構成は、上記実施の構成と同様である。
【0087】
すなわち、レンズホルダ10において、4つの幅の狭い側面10bに、上下に延びる断面三角形状の突条14がそれぞれ形成されている。一方、これら側面10bに対向するガイド体33の側面には、突条14に係合するV字状の溝33bがそれぞれ形成されている。
【0088】
図11(b)に示すように、レンズホルダ10がベース30に装着されると、突条14が溝33b内に嵌まり込む。この状態で、レンズホルダ10が上下に移動すると、これに伴って突条14が溝33b内を摺動する。このような構成とすれば、ガイド構造を容易に設けることができる。
【0089】
<撮像装置の変更例>
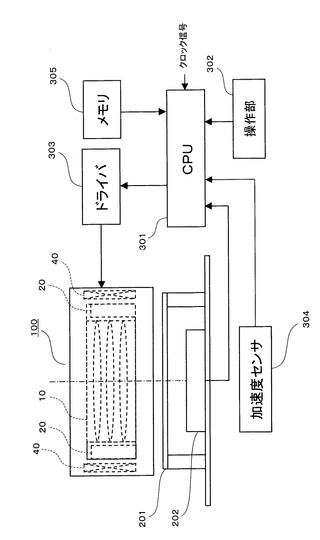
図12は、他の実施の形態に係る撮像装置の概略構成を示す図である。この実施の形態では、レンズ駆動装置の姿勢を検出するための加速度センサ304が配されている。この加速度センサ304は、少なくも1軸方向の重力加速度を検出する機能を有する。加速度センサ304は、上記1軸方向がレンズの光軸方向となるように配されている。加速度センサ304からは、ベース30側に重力加速度が生じていると正の加速度信号が出力され、カバー70側に重力加速度が生じていると負の加速度信号が出力される。
【0090】
加速度センサ304からの加速度信号は、CPU301に入力される。CPU301は、正の加速度信号が大きいときには、レンズ駆動装置100が水平から上方向を向いていると判断し、負の加速度信号が大きいときには、レンズ駆動装置100が水平から下方向を向いていると判断する。また、CPU301は、加速度信号がゼロあるいはゼロに近いときには、レンズ駆動装置100が水平方向を向いていると判断する。
【0091】
メモリ305には、図13に示すような、レンズホルダ10をノーマルポジションからマクロポジションへ変位させるための3つのパルス電流信号の波形パターン(第1波形パターン、第2波形パターン、第3波形パターン)が記憶されている。第1波形パターン、第2波形パターン、第3波形パターンは、それぞれ、レンズ駆動装置100が上向き、横向き、下向きの場合に対応するものである。第1波形パターン、第2波形パターン、第3波形パターンは、順次、長パルス信号および短パルス信号の印加時間が短くなっている。すなわち、レンズホルダ10を変位させるために大きな推進力を要する状況にあるほど、長パルス信号および短パルス信号の印加時間が長くなっている。
【0092】
レンズホルダ10をマクロポジションへ変位させる際、CPU301は、レンズ駆動装置100の姿勢を判断し、レンズ駆動装置100が水平よりも上向きであれば、大きな推進力が必要である判定する。このとき、CPU301は、第1波形パターンのパルス電流信号がコイル40に印加されるよう、ドライバ303に制御信号を出力する。また、CPU301は、レンズ駆動装置100の姿勢が略水平の向きであると判断すると、ノーマルの推進力が必要であると判定し、第2波形パターンのパルス電流信号がコイル40に印加されるよう、ドライバ303に制御信号を出力する。さらに、CPU301は、レンズ駆動装置100の姿勢が水平よりも下向きであると判断すると、小さな推進力が必要である判定し、第3波形パターンのパルス電流信号がコイル40に印加されるよう、ドライバ303に制御信号を出力する。
【0093】
なお、レンズホルダ10をマクロポジションからノーマルポジションヘ変位させる場合、CPU301は、レンズ駆動装置100の姿勢が水平よりも上向きであれば、第3波形パターンのパルス電流信号をコイル40に印加させ、また、レンズ駆動装置100の姿勢が水平よりも下向きであれば、第1波形パターンのパルス電流信号をコイル40に印加させるよう、ドライバ303に制御信号を出力する。レンズ駆動装置100の姿勢が略水平の向きであるときは、上記の場合と同様、第2波形パターンのパルス電流信号がコイル40に印加される。なお、この場合も、マクロポジションからノーマルポジションに変位させる際のレンズホルダ10を変位方向は、ノーマルポジションからマクロポジションにレンズホルダ10を変位させる場合に対して逆であるため、第1、第2、第3の波形パターンによるパルス電流信号は、極性を反転させて、コイル40に印加する必要がある。
【0094】
このように、本実施の形態によれば、レンズ駆動装置100の姿勢に応じて、パルス電流信号(長パルス信号、短パルス信号)の印加時間が調整されるので、パルス信号が無駄に印加されるのを抑制することができ、その結果、駆動に要する消費電力を低減させることができる。
【0095】
なお、メモリ305に上記のような波形パターンを記憶するのではなく、加速度信号に応じて長パルス信号および短パルス信号の印加時間を算出するための演算式を記憶し、この演算式をもとに、撮像場面において検出された加速度信号から印加時間を算出するようにしても良い。このような構成とした場合にも、波形パターンを記憶する場合と同様、レンズ駆動装置100の姿勢に応じたパルス電流信号を、コイル40に印加することができる。
【0096】
また、長パルス信号による電流量に比べて複数回の短パルス信号による電流量はかなり小さいため、上記のようにレンズ駆動装置の姿勢に応じて波形パターンを変化させる場合には、短パルス信号よりも長パルス信号の印加時間を変化させることによって、大きな電力削減効果が得られる。したがって、このように波形パターンを調整する場合には、長パルス信号の印加時間のみを変化させ、短パルス信号の印加時間は一定のままとするようにしても良い。
【0097】
さらに、レンズ駆動装置100の姿勢を検出するために、加速度センサ304に変えて、その他公知の傾き検出用のセンサを利用することもできる。また、加速度センサーは、撮像装置側ではなく、小型カメラ本体側やカメラ付き携帯電話機側に配備しても良い。
【0098】
<オートフォーカス機能への適用例>
なお、本発明の撮像装置は、オートフォーカス用のレンズ駆動装置を搭載した撮像装置にも適用することができる。この場合、オートフォーカス用のレンズ駆動装置は、上記実施の形態のレンズ駆動装置100と同様の構成とすることができる。オートフォーカス用のレンズ駆動装置の場合、図3に示すノーマルポジションが、フォーカス調整動作の際のレンズのホームポジションになる。そして、このホームポジションから、オンフォーカス位置へとレンズホルダ10が駆動される。
【0099】
すなわち、オートフォーカス動作が開始されると、予め定められた回数のパルス電流信号がコイル40に印加され、レンズを保持したレンズホルダ10が、ホームポジションからレンズ光軸方向に徐々に変位される。1回のパルス電流信号によってレンズおよびレンズホルダ10が変位する度に、イメージセンサユニット202からの信号をもとに、レンズが捕らえた画像のコントラスト値が検出される。コントラスト値の検出は、全回数のパルス電流信号の印加によって、レンズおよびレンズホルダ10がホームポジションからフォーカス調整領域の終端位置に到達するまで繰り返される。このとき、コントラスト値は、レンズおよびレンズホルダ10がオンフォーカス位置にあるときに最大となる。
【0100】
しかる後、各回のコントラスト値が大小比較され、何回目のパルス電流信号によってコントラスト値が最大になったかが抽出される。そして、一旦、レンズがホームポジションに戻された後、抽出された回数分のパルス電流信号によって、レンズおよびレンズホルダ10が再びホームポジションから変位される。これにより、レンズが、コントラスト値が最大となった位置、すなわちオンフォーカス位置に位置づけられることとなる。
【0101】
かかるフォーカス引き込み動作において、レンズホルダ10をフォーカス調整領域の終端位置からホームポジションに復帰させる際には、図7(a)、図9、図13に示すような、長パルス信号と複数の短パルス信号とからなるパルス電流信号が用いられる。この場合、フォーカス調整領域の終端位置からホームポジションに復帰させる際のレンズホルダ10の変位方向は、上述のノーマルポジションからマクロポジションへと向かう際のレンズホルダ10の変位方向とは逆になっているため、図7(a)、図9、図13に示すパルス電流信号は、極性を反転した状態で、コイル40に印加される。これにより、レンズホルダ10がホームポジションに適正に位置づけられる。よって、オンフォーカス位置への引き込み動作に狂いが生じるのを防止でき、結果、フォーカス調整精度を向上させることができる。
【0102】
この他、本発明の実施の形態は、特許請求の範囲に示された技術的思想の範囲内において、適宜、種々の変更が可能である。
【図面の簡単な説明】
【0103】
【図1】実施の形態に係るレンズ駆動装置の構成を示す分解斜視図
【図2】実施の形態に係るレンズ駆動装置の構成を示す組立斜視図
【図3】実施の形態に係るレンズ駆動装置の駆動動作を説明する図
【図4】実施の形態に係るレンズホルダを保持するための構成を示す図
【図5】実施の形態に係る磁性板の変形例を示す図
【図6】実施の形態に係る撮像装置の構成を示す図
【図7】実施の形態に係るレンズ駆動装置の駆動制御について説明する図
【図8】実施の形態に係る短パルス信号による駆動時のレンズホルダの動きを示す図
【図9】実施の形態に係るレンズホルダを駆動するためのパルス電流信号の変更例を示す図
【図10】他の実施の形態に係るレンズ駆動装置の構成を示す分解斜視図
【図11】他の実施の形態に係るレンズ駆動装置の構成を示す組立斜視図
【図12】他の実施の形態に係る撮像装置の構成を示す図
【図13】他の実施の形態に係るレンズホルダを駆動するためのパルス電流信号を示す図
【符号の説明】
【0104】
10 レンズホルダ(ホルダ)
20 磁石
30 ベース(支持部、当接部)
40 コイル
50 磁性板(保持力付与部、磁性部材)
60、61 シャフト(保持力付与部)
70 カバー(支持部、当接部)
301 CPU(制御部)
303 ドライバ(駆動部)
305 加速度センサ(姿勢検出部)
【技術分野】
【0001】
本発明は、撮像装置に関するものであり、特に、小型カメラ、カメラ付き携帯電話機等に適用されて好適なものである。
【背景技術】
【0002】
カメラ付き携帯電話機の中には、ある程度離れた位置から被写体を撮影するための撮影機能の他に、近接位置から被写体を撮影するための、いわゆるマクロ撮影機能を備えるものが存在する。この場合、携帯電話機内には、通常撮影時とマクロ撮影時とでレンズ位置を切替えるための構造を備えた撮像装置が搭載される。すなわち、この構成では、レンズは、通常撮影時において第1の位置に固定され、マクロ撮影時には第1の位置よりも被写体に接近した第2の位置に固定される。このような構造を有する撮像装置の一例が、たとえば、特許文献1に記載されている。
【0003】
この撮像装置では、外枠部材内に、レンズが、その光軸方向に変位可能に支持されている。レンズは、バネによって通常撮影時の位置に付勢されている。また、外枠部材には、レンズ光軸に直交する面内において回転自在なリング状の回転部材が取り付けられている。この回転部材には磁石が配され、また、レンズ側にも磁石が配されている。ユーザが回転部材を回転させると、回転部材側の磁石がレンズ側の磁石に接近する。そして、両磁石が互いに対向する位置まで回動部材が回動されると、磁石同士の引力により、レンズが、バネによる付勢に抗して、マクロ撮影時の位置に変位する。
【特許文献1】特開2004−266340号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記の撮像装置は、ユーザが手動で回動部材を回動させて、レンズ位置をマクロ撮影時の位置に切り替えるものであるため、マクロ撮影への切り替えの際に、ユーザにおいて、煩雑な操作が必要となってしまう。これに対し、マクロ撮影への切り替えを電動にて行えるようにすれば、たとえば、ボタン操作等の簡便な操作をもって、レンズをマクロ撮影時の位置へと変位させることができる。また、被写体と撮像装置との距離に応じて自動的に、レンズ位置を切り替えることもでき、ユーザの利便性を向上させることができる。
【0005】
ところで、マクロ撮影機能を有する撮像装置では、マクロ撮影と通常の撮影を円滑に行うために、レンズをマクロ撮影時の位置(以下、「マクロポジション」という)と通常撮影時の位置(以下、「ノーマルポジション」という)に適正に位置づける必要がある。すなわち、レンズがノーマルポジションあるいはマクロポジションからずれると、イメージセンサ(たとえば、CCD:Charge Coupled Device)に対するフォーカスずれが生じ、被写体の撮像画像にぼけが生じてしまう。したがって、上記のようにレンズを電気的に駆動する構成の場合にも、レンズをマクロポジションとノーマルポジションに適正に位置づけるための構成が要求される。
【0006】
一方、撮像装置の中には、上記のようにレンズをノーマルポジションまたはマクロポジションに固定せずに、適宜、レンズを適正なフォーカス位置(オンフォーカス位置)に引き込む、いわゆるオートフォーカス機能を備えるものが存在する。この場合、オートフォーカスのための機構の一つとして、磁石とコイルとに生じる電磁力によってレンズを駆動する構成が考えられる。
【0007】
この構成では、たとえば、以下のようにして、レンズがオンフォーカス位置に位置づけられる。すなわち、オートフォーカス動作が開始されると、予め定められた回数のパルス電流信号がコイルに印加され、レンズが、ホームポジションからレンズ光軸方向に徐々に変位される。1回のパルス電流信号によってレンズが変位する度に、イメージセンサからの信号をもとに、レンズが捕らえた画像のコントラスト値が検出される。コントラスト値の検出は、必要な回数のパルス電流信号の印加によって、レンズがホームポジションからフォーカス調整領域の終端位置に到達するまで繰り返される。このとき、コントラスト値は、レンズがオンフォーカス位置にあるときに最大となる。その後、何回目のパルス電流信号によってコントラスト値が最大となったかが抽出され、一旦、レンズがホームポジションに戻された後、抽出された回数分のパルス電流信号によってレンズが再び変位される。これにより、レンズが、コントラスト値が最大となった位置、すなわちオンフォーカス位置に位置づけられる。
【0008】
このような構成では、ホームポジションがフォーカス引き込みの際の基準位置となる。このため、レンズがホームポジションに適正に位置づけられないと、オンフォーカス位置に狂いが生じる惧れがある。したがって、このようなオートフォーカス機構を備えた撮像装置においても、レンズをホームポジションに適正に位置づけるための構成が求められる。
【0009】
本発明は、このような課題を達成するためになされたものであり、通常撮影時、マクロ撮影時、あるいは、フォーカス調整時に、電動にてレンズを所望の位置に適正に位置づけることができ、これにより、利便性の向上と、撮影精度の向上を同時に実現することができる撮像装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明の第1の態様に係る撮像装置は、レンズを保持するホルダと、前記ホルダを前記レンズの光軸方向に変位可能に支持する支持部と、前記支持部に設けられ、前記ホルダが基準位置に位置づけられたときに当該ホルダに当接する当接部と、前記ホルダと前記支持部の何れか一方に配された磁石と、前記磁石に対向するよう配置され、電流が印加されることにより前記磁石と相俟って前記ホルダに電磁駆動力を生じせしめるコイルと、前記コイルへの給電が停止されたとき、前記磁石との間の磁力によって前記ホルダを給電停止後の位置に保持させるための磁性部材と、前記コイルに電流信号を印加して前記ホルダを駆動制御する制御部とを備え、前記制御部は、前記ホルダを前記基準位置まで変位させる際、前記コイルに対して、第1のパルス電流信号を印加した後、当該第1のパルス電流信号より印加時間が短い第2のパルス電流信号を複数回印加することを特徴する。
【0011】
この態様では、ホルダが基準位置に変位される際には、まず、第1のパルス電流信号がコイルに印加される。これにより、ホルダは基準位置の近傍位置まで変位する。続いて、第2のパルス電流信号がコイルに複数回印加される。これにより、ホルダは、基準位置に徐々に近づき、やがて当接部に当接することで基準位置に到達する。その後、基準位置に位置づけられたホルダは、磁石と磁性部材の間に生じる磁力によってその位置に保持される。
【0012】
本発明の第2の態様は、第1の態様に係る撮像装置において、前記撮像装置の姿勢に応じた検出信号を出力する姿勢検出部を備え、前記制御部は、前記姿勢検出部からの検出信号に応じて、少なくとも前記第1のパルス電流信号の印加時間を調整することを特徴とする。
【0013】
この態様では、姿勢検出部を、たとえば、加速度センサで構成することができる。この場合、加速度センサからの加速度信号をもとに、撮像装置に対しどの方向に重力加速度が生じているかが検出され、その検出結果をもとに、撮像装置の姿勢が判断される。そして、基準位置が現在のホルダの位置よりも鉛直上方にあるなど、ホルダを動かしくい状態にあるときには、第1のパルス電流信号の印加時間が長くされ、反対に、基準位置が現在のホルダの位置よりも鉛直下方にあるなど、ホルダを動かしやすい状態にあるときには、第1のパルス電流信号の印加時間が短くされる。
【0014】
なお、第1のパルス電流信号に加え、第2のパルス電流信号の印加時間を撮像装置の姿勢に応じて調整することもできる。
【0015】
本発明の第3の態様は、第1または第2の態様に係る撮像装置において、複数回印加される前記第2のパルス電流信号を、後の回数になるに従って段階的に印加時間が短くなるように構成したことを特徴とする。
【0016】
本発明の第4の態様は、第1ないし第3の何れかの態様に係る撮像装置において、前記磁石と前記磁性部材は、互いに対向するよう、前記ホルダと前記支持部にそれぞれ配置され、前記磁性部材の前記光軸方向の長さを、前記磁石の前記光軸方向の長さよりも長くしたことを特徴とする。
【発明の効果】
【0017】
本発明の第1の態様によれば、第1のパルス信号によってレンズを基準位置に大きく接近させ、その後、第2のパルス信号によってレンズを基準位置に徐々に接近させるため、レンズを基準位置に迅速かつ効率的に位置づけることができる。加えて、第1の態様によれば、基準位置の手前から第2のパルス電流信号によって徐々にホルダが変位されるため、基準位置に到達したときに、ホルダが当接部に強く当たることがない。したがって、ホルダが、当接部に当った反動で、基準位置から離れてしまうようなことが起こりにくく、基準位置からのレンズの位置ずれを防止することができる。また、ホルダが当接部に当たったときの衝突音も低減される。
【0018】
したがって第1の態様によれば、通常撮影時、マクロ撮影時、あるいは、フォーカス調整時に、レンズを基準位置(ノーマルポジション/ホームポジション/マクロポジション)に適正に位置づけることができ、これにより、撮影精度を向上させることができる。
【0019】
本発明の第2の態様によれば、撮像装置の姿勢に応じて、第1のパルス電流信号の印加時間が調整されるため、印加時間が一定である場合に比べて、効率的にレンズを基準位置に位置づけることができ、その結果的として、消費電力の低減を図ることができる。
【0020】
本発明の第3の態様によれば、ホルダが基準位置から離れているときは、第2のパルス信号によってホルダが大きく変位され、ホルダが基準位置に接近するに従って、第2のパルス信号によるホルダの変位量が小さくなるので、第1のパルス信号によって変位された後の位置から基準位置までの区間において、ホルダを効率的に変位させることができる。よって、基準位置に対するホルダの到達時間を短縮でき、また、ホルダを基準位置にスムーズに位置付けることができる。
【0021】
本発明の第4の態様によれば、磁石と磁性部材との間に働くレンズ光軸に直交する方向の磁力を利用してホルダを保持することができる。また、レンズ光軸方向、すなわちホルダの変位方向において、磁性部材の長さが磁石の長さより長くなっているので、ホルダが変位する範囲内において、ホルダを保持するための磁力を、ホルダに安定して付与することができる。したがって、コイルへの給電を停止した後の位置に、ホルダを安定して保持することができる。
【0022】
本発明の効果ないし意義は、以下に示す実施の形態の説明により更に明らかとなろう。ただし、以下の実施の形態は、あくまでも、本発明を実施化する際の一つの例示であって、本発明は、以下の実施の形態に記載されたものに何ら制限されるものではない。
【発明を実施するための最良の形態】
【0023】
以下、本発明の実施の形態について、図面を参照して説明する。本実施の形態に係る撮像装置は、オートフォーカス機能を備えない撮像装置に本発明を適用したものである。すなわち、本実施の形態では、レンズの位置が、通常撮影を行うときの位置(ノーマルポジション)とマクロ撮影を行うときの位置(マクロポジション)の2つの位置に切り替え固定される。ここで、撮像装置には、レンズ位置をノーマルポジションとマクロポジションに切り替え可能な、いわゆるマクロ切替え用のレンズ駆動装置が含まれている。
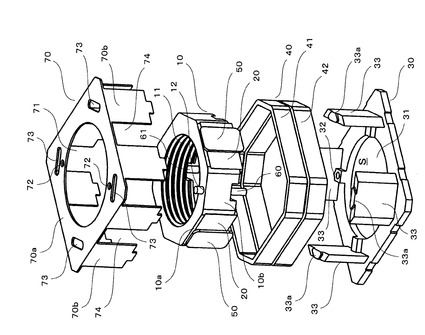
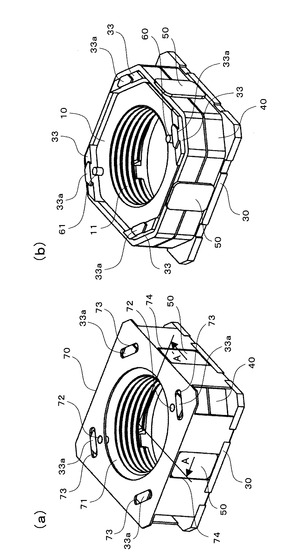
【0024】
図1は、実施の形態に係るレンズ駆動装置の分解斜視図である。図2は、アセンブルした後のレンズ駆動装置の構成を示す図である。同図(a)はアセンブルが完成した図であり、同図(b)は、同図(a)に示すレンズ駆動装置の内部状態が分かるように、カバー70を取り外した状態を示す図である。
【0025】
10はレンズホルダである。レンズホルダ10は、平面視で八角形状を有する。レンズホルダ10には、その中央位置に、レンズを収容するための円形の開口11が形成されている。レンズホルダ10の8つの側面は、開口11に装着されたレンズの光軸に対して対称となるように配置されている。これら8つの側面は、幅が広い4つの側面10aと幅が狭い4つの側面10bからなる。側面10aと側面10bは、レンズホルダ10において、交互に配されている。
【0026】
さらに、レンズホルダ10には、2本のシャフト60、61にそれぞれ係合する丸孔12と長孔13が形成されている(図4参照)。また、レンズホルダ10における幅の広い4つの側面10aのうち、1つの側面10aとこの側面10aに垂直な1つの側面10aには、それぞれ磁石20が装着されている。これら2つの磁石20は、片面にNとSが着磁された2極配置構造となっている。また、各磁石20のサイズおよび磁気強度は互いに等しくなっている。
【0027】
30はベースである。ベース30は、ほぼ方形の板状に形成されている。ベース30には、レンズを透過した光をイメージセンサへと導くための開口31が形成され、さらに、シャフト60、61を挿入するための2つの孔32が形成されている。なお、図1では1つの孔32のみが図示されている。
【0028】
また、ベース30には、開口31の周囲に4つのガイド体33が突設されている。これらガイド体33の先端部には、それぞれ凸部33aが形成されている。なお、4つのガイド体33に囲まれた空間がレンズホルダ10の収容空間Sとなる。
【0029】
40はコイルである。コイル40は、4つのガイド体33の外周に巻回される。コイル40は、第1のコイル41と第2のコイル42とからなる。第1のコイル41と第2のコイル42は、直列接続されているとともに、その巻き方向が逆にされている。このため、第1のコイル41と第2のコイル42は、電流が流れる方向が反対になる。
【0030】
50は磁性材料からなる2つの磁性板である。これら磁性板50は、レンズ駆動装置がアセンブルされた際、コイル40の外周に配され、コイル40の内周に配される2つの磁石20のそれぞれに対向する。
【0031】
60、61はシャフトである。これらシャフト60、61は、それぞれ、断面が円形で、レンズホルダ10側の丸孔12および長孔13の内径よりもやや小さい径を有している。なお、シャフト60、61は、磁性材料、非磁性材料のどちらで形成されてもよい。
【0032】
70はカバーである。カバー70は、ほぼ方形の上面板70aと上面板の周縁から垂下する4つの側面板70bとで構成されている。上面板70aには、レンズに光を取り込むための開口71が形成されている。また、上面板70aには、シャフト60、61が挿入される2つの孔72と、ガイド体33の凸部33aが挿入される4つの長孔73が形成されている。
【0033】
カバー70の4つの側面板70bには、切欠き部74が形成されている。この切欠き部74は、カバー70をベース30に被せたときに、磁性板50を逃がすために形成されたものである。なお、切欠き部74は、4つの側面板70の全てに形成されている。これは、後述するように、レンズホルダ10の4つの側面10a全てに磁石20が配され、これら4つ磁石20に対応して4つの磁性板50が配された場合にも対応できるようにするためである。
【0034】
アセンブル時には、磁性板50をコイル40の外周面に接着剤等によって装着し、磁性板50が装着されたコイル40をベース30に配する。次に、2本のシャフト60、61をレンズホルダ10の丸孔12および長孔13に挿入し、シャフト60、61が挿入されたレンズホルダ10を上方からベースの収容空間Sに収容する。このとき、レンズホルダ10を貫通したシャフト60、61の下端がベース30の孔に挿入され、固着される。この状態において、2つの磁石20は、コイル40に所定の隙間を有する状態で対向する。また、レンズホルダ10の4つの側面10bが、ガイド体33の側面に近接する。なお、図示が省略されているが、レンズホルダ10の開口11には、前もってレンズが装着されている。
【0035】
最後に、カバー70を、2つの孔72が2本のシャフト60、61の上端に挿入され、4つの長孔73が凸部33aに挿入されるように、上方からベース30に装着する。これにより、レンズホルダ10が、シャフト60、61に沿って変位可能な状態で、ベース30とカバー70に取り付けられる。こうして、図2(a)に示すような状態でアセンブルが完了する。
【0036】
アセンブルされた状態において、磁石20のN極は、上側の第1のコイル41に対向し、磁石20のS極は、下側の第2のコイル42に対向する。したがって、第1のコイル41および第2のコイル42に電流信号が印加されると、磁石20に電磁駆動力が作用し、レンズホルダ10は、シャフト60、61に沿って摺動する。
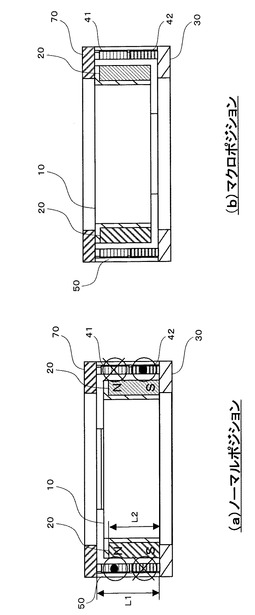
【0037】
図3は、レンズ駆動装置の駆動動作を説明する図である。なお、同図は、図2(a)のA−A’断面図である。
【0038】
同図(a)は、レンズホルダ10がノーマルポジションにあるときの状態を示す図である。このノーマルポジションは、通常撮影時のときのレンズの位置となる。ノーマルポジションにあるとき、レンズホルダ10の下端は、ベース30に当接した状態となる。上記のように、第1のコイル41と第2のコイル42にそれぞれ磁石20のNとSの着磁領域がそれぞれ対向する。また、第1のコイル41と第2のコイル42は、電流が流れる方向が反対になる。
【0039】
ノーマルポジションにある状態から、第1のコイル41および第2のコイル42に同図(a)に示す方向の電流が流れると、磁石20に上方向の推進力が作用し、レンズホルダ10は、シャフト60、61に沿って、ノーマルポジションから上方向に変位し、同図(b)に示すマクロポジションに到達する。マクロポジションは、マクロ撮影時のレンズの位置となる。マクロポジションにあるとき、レンズホルダ10の上端は、カバー70に当接した状態となる。
【0040】
同図(b)に示すマクロポジションの状態から、第1のコイル41および第2のコイル42に同図(a)の場合と反対方向に電流が流れると、磁石20に下方向の推進力が作用し、レンズホルダ10は、シャフト60、61に沿って、下方向に変位し、ノーマルポジションに戻ってくる。なお、図中、円に黒点のマークは図面参照者に向かってくる方向を示し、円にバツのマークは図面参照者から遠ざかる方向を示す。
【0041】
このようにして、レンズホルダ10が上方向と下方向に変位することで、レンズの位置がノーマルポジションとマクロポジションとの間で切り替わる。
【0042】
上述のように、ノーマルポジションは、レンズホルダ10の下端(一端)がベース30に当接する位置に設定されており、マクロポジションは、レンズホルダ10の上端(他端)がカバー70に当接する位置に設定されている。このような構成であれば、レンズホルダ10を、ベース30に当接させることでノーマルポジションに位置づけることができ、カバー70に当接させることで、マクロポジションに位置づけることができる。このため、レンズホルダ10の位置が検出されなくても、レンズホルダ10を適正な位置に位置づけしやすくなる。
【0043】
さて、アセンブルされた状態において、レンズホルダ10は、図4(a)に示すように、2つの磁石20とそれに対向する2つの磁性板50との間に生じる磁力によって、互いに直交する2方向から引力Fを受ける。また、これら引力Fでレンズホルダ10が外周方向に引かれることにより、シャフト60が孔12におけるホルダ中心側の内壁面に強く押し付けられ、これらの間に比較的大きな摩擦力が生じる。このため、レンズホルダ10がマクロポジションやノーマルポジションにあるときに、コイル40へ給電しておかなくても、上記の引力Fと摩擦力とによって、レンズホルダ10がその位置に保持される。
【0044】
なお、図4(b)に示すように、レンズホルダ10において、対向する2つの側面10aに磁石20を配し、それら磁石20に対向するように磁性板50を配することもできる。
【0045】
このような構成とした場合、磁石20と磁性板50との間に生じる磁力によって、レンズホルダ10は相反する2方向から引力Fを受ける。これら2つの引力Fによって、レンズホルダ10は、相反する2方向から吊られたような状態となる。このため、レンズホルダ10を鉛直方向に動かす場合にも、重力の影響を受けにくくなり、下向き駆動時と上向き駆動時の間の駆動差(動き出しの速さや駆動レスポンスなど)が出にくくなる。よって、レンズホルダ10を鉛直方向に移動させる状態にてレンズ駆動装置が使用された場合であっても、レンズホルダ10の駆動を円滑に行うことができる。また、レンズホルダ10がマクロポジションやノーマルポジションにあるときに、コイル40へ給電しておかなくても、上記の2つの引力Fによって、レンズホルダ10がその位置に保持される。
【0046】
さらに、図4(c)に示すように、4つの側面10aに磁石20を配し、それら磁石20に対向するように磁性板50を配するようにしても良い。このような構成とすれば、レンズホルダ10が、引力Fによって4方向から吊られた状態となり、より安定して吊られた状態となるので、より重力の影響がなくなって上記駆動差が出にくくなる。また、レンズホルダ10に対する保持力も大きくなる。
【0047】
また、図3に示すように、磁性板50は、レンズの光軸方向の長さL1が、磁石20におけるレンズの光軸方向の長さL2よりも長くなるよう、ベース30とカバー70の間の距離と同じにされている。これにより、レンズホルダ10が変位する範囲内において、磁石20と磁性板50による引力Fをレンズホルダ10に安定して付与することができ、レンズホルダ10を安定して保持することができる。
【0048】
磁性板50は、図5(a)、(b)に示す構成に変更することができる。同図(a)の構成では、磁性板50におけるベース30側の端部が、ベース30の外底面まで延ばされている。これにより、レンズホルダ10がノーマルポジションにある状態において、磁性板50の中心Qが、磁石20の中心Pよりもベース30側に位置している。
【0049】
磁性板50の長さL1が磁石20の長さL2に対してあまり長くない場合には、磁石20は磁性板50の中心に向かって引き付けられる。よって、この場合、磁石20は磁性板50の中心Qに向かって引き付けられ、これによって、レンズホルダ10は、磁性板50側へ引き付けられるとともに、ベース30側へも引き付けられる。レンズホルダ10は、通常、ノーマルポジションにあることが多いが、このような構成とすれば、レンズホルダ10を、ノーマルポジションに安定して保持することができる。
【0050】
図5(b)の構成では、磁性板50におけるベース30側の端部が、ベース30の外底面まで延ばされているとともに、カバー70側の端部が、カバー70の外天面まで延ばされている。すなわち、磁性板50の長さL1が、磁石20の長さL2に比べて、極力長くされている。
【0051】
このように磁性板50の長さL1と磁石20の長L2との差が大きくなってくると、上述したような、磁石20が磁性板50の中心Qに向かって引かれる力、すなわちレンズの光軸方向(変位方向)に作用する引力が小さくなる。したがって、このような構成とすれば、レンズホルダ10が変位する際、変位方向に引力の影響を受けにくくなる。よって、レンズホルダ10を円滑に駆動することができる。
【0052】
図6は、本実施の形態に係る撮像装置の概略構成を示す図である。撮像装置は、たとえば、小型カメラやカメラ付き携帯電話機に搭載される。
【0053】
レンズ駆動装置100のベース30側には、フィルタ201と、イメージセンサユニット202が配されている。イメージセンサユニット202からは、CPU301に対し、ピントが合っているか否かを判断するための指標となるコントラスト信号が出力される。
【0054】
イメージセンサユニット202には、ISP(Image Signal Processor)が内蔵されており、イメージセンサユニット202が捕らえた画像における1画素毎のコントラスト値が、このISP内で積分される。これにより、画像の総合的なコントラスト値が算出され、これがコントラスト信号として出力される。被写体にピントが合っているほど、画像がくっきりするため、コントラスト値は高くなる。
【0055】
また、CPU301には、操作部302からレンズの位置の切替えを指示するための信号が出力される。操作部302は、操作ボタンなどで構成されている。ユーザによってレンズをマクロポジションへ切替える操作が行われると、操作部302からマクロポジションへの切替えを指示する信号が出力される。また、ユーザによってレンズをノーマルポジションに切替える操作が行われると、操作部302からノーマルポジションへの切替えを指示する信号が出力される。なお、レンズをマクロポジションとノーマルポジションに切り替えるための操作ボタンは、カメラ撮影時に操作しやすい位置に割り当てられているのが望ましい。
【0056】
CPU301は、レンズホルダ10がノーマルポジションの位置にあるときに、操作部302からマクロポジションへの切替え指示があると、レンズホルダ10をマクロポジションへ変位させるための制御信号をドライバ303に出力する。また、CPU301は、イメージセンサユニット202から入力されたコントラスト値が、所定の閾値よりも低いか否かを判断する。そして、コントラスト値が閾値よりも小さいときには、被写体との距離が近いためにピントが合っていないと判断して、レンズホルダ10をマクロポジションへ変位させるための制御信号をドライバ303に出力する。
【0057】
ドライバ303は、CPUからの制御信号に従って、レンズ駆動装置100のコイル40に電流信号を印加する。これにより、レンズホルダ10が、図3の如く、マクロポジションへ変位する。
【0058】
一方、CPU301は、レンズホルダ10がマクロポジションの位置にあるときに、ノーマルポジションへの切替え指示があると、あるいは、ピントが合っていないと判断すると、レンズホルダ10をノーマルポジションへ変位させるための制御信号をドライバ303に出力する。ドライバ303は、この制御信号に従って、コイル40に電流信号を印加する。これにより、レンズホルダ10が、図3の如く、ノーマルポジションへ変位する。
【0059】
なお、イメージセンサユニット202で捕らえられた画像が色彩の変化が小さい画像である場合にも、ピントが合っていない場合と同様に、コントラスト値が小さくなる。したがって、色彩の変化が小さい画像である場合にも、ピントがあっていないと判断されて、レンズの位置が切り替えられる惧れがある。この場合、レンズの位置が切り替えられ、これによってピントが合えば、コントラスト値が大きくなる。しかし、色彩の変化が小さい画像の場合には、レンズの位置が切り替えられても、コントラスト値が低いままとなる。そこで、レンズの位置が切り替わってもコントラスト値が閾値より大きくならなければ、コントラスト値が小さかった原因はピントではないと判断して、レンズホルダ10を元の位置に戻すような構成とすることができる。このようにすれば、誤検出が生じたとしても、それに円滑に対応することができる。
【0060】
また、上記のように、ピントが合っているか否かを判断することにより、被写体と撮像装置との距離(撮影距離)に対してレンズの位置が適正であるか否を判断することもできるが、撮影距離を実際に測定することによって、レンズの位置が適正であるか否を判断することもできる。この場合、たとえば、赤外線レーザを用いた距離センサを撮像装置に搭載することができる。
【0061】
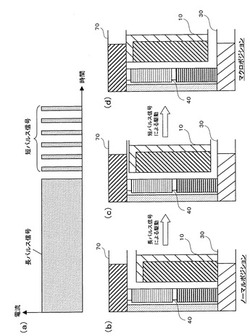
図7は、レンズ駆動装置の駆動制御について説明する図である。同図(a)は、ドライバ303からコイル40に印加されるパルス電流信号の波形図であり、同図(b)は、同図(a)のパルス電流信号によって駆動したときのレンズホルダ10の動きを示す図である。なお、図6は、レンズホルダ10をノーマルポジションからマクロポジションへ変位させる場合の例を示すものであるが、レンズホルダ10をマクロポジションからノーマルポジションヘ変位させる場合も同様な駆動制御が行われる。
【0062】
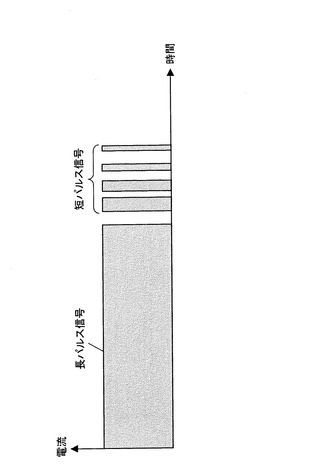
レンズホルダ10を駆動するために、ドライバ303からは、図7(a)に示すパルス電流信号がコイル40に印加される。すなわち、最初に、印加時間の長いパルス電流信号(以下、「長パルス信号」という)がコイルに1回印加され、続いて、印加時間の短いパルス電流信号(以下、「短パルス信号」)が複数回コイルに印加される。なお、ここでは、短パルス信号の長さ(印加時間)が全て同じに設定されている。
【0063】
CPU301には、図6に示すように、パルス電流信号を生成するためのクロック信号が入力される。CPU301は、内部のカウンタによって、クロック信号をカウントし、カウント結果に応じて、長パルス信号と短パルス信号のON/OFF制御を行う。
【0064】
すなわち、CPU301は、まず、ON信号をドライバ203に出力して、ドライバ203から長パルス信号を出力させる。このとき同時に、CPU301は、クロック信号のカウントを開始し、そのカウント値が長パルス信号の印加時間に相当するクロック数に達するまでの間、ドライバ303にON信号を出力し続ける。そして、カウント値が長パルス信号の印加時間に相当するクロック数に達すると、CPU301は、ドライバ203にOFF信号を出力し、長パルス信号の出力を停止させる。その後、さらに、停止時間に相当する個数のクロック信号をカウントすると、CPU301は、再びON信号をドライバ203に出力して、ドライバ203から短パルス信号を出力させる。そして、クロック信号のカウント値が短パルス信号の印加時間に相当するクロック数に達すると、CPU301は、ドライバ203にOFF信号を出力し、短パルス信号の出力を停止させる。さらに、停止時間に相当するクロック数をカウントすると、CPU301は、再度、短パルス信号の印加時間に相当するクロック数をカウントするまでの間、ドライバ303にON信号を出力する。その後、CPU301は、短パルス信号を出力させるためのON/OFF信号を、短パルス信号の出力回数だけ繰り返して、ドライバ303に出力する。
【0065】
ドライバ303は、CPU301からON信号が入力されると電流信号を出力し、OFF信号が入力されると電流信号をOFFする。こうして、ドライバ303からは、上述した、パルス電流信号の波形が出力されることになる。
【0066】
なお、本実施の形態では、ノーマルポジションからマクロポジションへのレンズホルダ10の変位量は、たとえば、0.1〜0.3mm程度に設定されている。そして、このような変位量に対し、長パルス信号の印加時間は、たとえば、数十〜数百mm秒程度に設定され、短パルス信号の印加時間は、たとえば、数十〜数百μ秒程度に設定されている。また、短パルス信号の印加回数は、たとえば、6回に設定されている。但し、これら印加時間や印加回数は、レンズホルダ10の変位量やその他の条件に応じて、予め試験などにより、適宜決められるものである。
【0067】
レンズホルダ10には、パルス電流信号の印加時間に応じた推進力(コイル40と磁石20による電磁駆動力)が付与され、レンズホルダ10は、その推進力に応じた距離だけ変位する。コイル40に長パルス信号が印加されると、これによる推進力によって、レンズホルダ10は、図7(b)に示すノーマルポジションからマクロポジション側に変位し、マクロポジションよりも少し手前の、図7(c)に示す位置で停止する。その後、コイル40に短パルス信号が複数回印加されると、これによる推進力によって、レンズホルダ10は、図7(c)の位置から、少しずつ、図7(d)に示すマクロポジション側に移動し、カバー70に当接することによってマクロポジションに位置づけられる。
【0068】
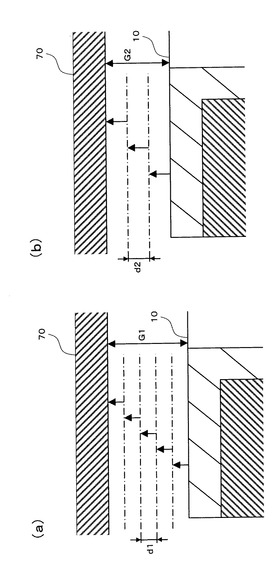
図8は、短パルス信号による駆動時のレンズホルダ10の動きの一例を模式的に示す図である。なお、同図(a)は、重力に抗してレンズホルダ10が駆動されるときの状態を示し、同図(b)は、重力に沿ってレンズホルダ10が駆動されるときの状態を示す。また、図中の一点鎖線は、1回の短パルス信号が印加された後のレンズホルダ10の停止位置を示している。
【0069】
図示の如く、レンズホルダ10は、短パルス信号が印加される度に少しずつカバー70側に移動する。そして、短パルス信号が複数回印加される間にカバー70に当接すると、そこで停止する。
【0070】
このとき、レンズ駆動装置100の姿勢の違いによって、短パルス信号によって同じ推進力が付与されても、レンズホルダ10の変位量が異なってくる。レンズが水平から上を向くような姿勢にレンズ駆動装置100があるとき、すなわち、マクロポジションがノーマルポジションよりも鉛直上方に位置するときには、レンズホルダ10を重力に抗して変位させなければならないので、図8(a)に示すように、1回の短パルス信号によるレンズホルダ10の変位量d1が小さくなる。また、このように重力に抗してレンズホルダ10を駆動する場合には、長パルス信号を印加した際のレンズホルダ10変位量も小さいため、長パルス信号印加後のレンズホルダ10の停止位置、すなわち、短パルス信号印加開始時におけるレンズホルダ10の位置は、カバー70から大きく後退し、レンズホルダ10からカバー70(マクロポジション)までの距離G1が大きくなる。このため、重力に抗してレンズホルダ10を駆動する場合には、同図(a)に示す如く、レンズホルダ10がマクロポジションに到達するまでの短パルス信号の印加回数が多くなる。
【0071】
一方、レンズが水平から下を向くような姿勢にレンズ駆動装置100があるとき、すなわち、マクロポジションがノーマルポジションよりも鉛直下方に位置するときには、レンズホルダ10を重力に沿って変位させることになるので、図8(b)に示すように、短パルス信号による1回当りのレンズホルダ10の変位量d2が大きくなり、また、長パルス信号印加後のレンズホルダ10の停止位置からカバー70(マクロポジション)までの距離G2が小さくなる。このため、レンズホルダ10がマクロポジションに到達するまでの短パルス信号の印加回数が少なくなる。
【0072】
長パルス信号の時間幅と短パルス信号の印加回数は、これら重力などの影響により、レンズホルダ10が最も変位しにくい状況下であっても、レンズホルダ10がマクロポジションに到達できる時間幅と印加回数に予め調整されている。なお、このように設定すると、通常は、短パルス信号の印加回数が設定回数に達するよりも前に、レンズホルダ10がノーマルポジションに到達し、その後も残りの短パルス信号が印加され続けることになる。しかし、このように残りの短パルス信号が印加されても、レンズホルダ10は、これら残りの短パルス信号による推進力によって、カバー70に押さえつけられ続けるだけであるため、レンズホルダ10をマクロポジションに位置づけるにおいて、これら残りの短パルス信号が悪影響を及ぼすことはない。
【0073】
また、レンズホルダ10は、短パルス信号による推進力によって、マクロポジションの近傍位置から少しずつ変位してカバー70に当接する。よって、レンズホルダ10がカバー70に強く当たることがないので、耳障りとなる衝突音が発生することもない。また、レンズホルダ10が、カバー70に当たった反動で、カバー70から離れてしまうようなことも起こりにくく、適正な位置からのレンズの位置ずれも防止される。
【0074】
なお、カバー70に当たった反動でレンズホルダ10がカバー70から離れたとしても、その後、残りの短パルス信号によってレンズホルダー10がカバー70に押し付けられるため、レンズホルダー10はマクロポジションに当接する位置に位置付けられる。
【0075】
なお、マクロポジションへのレンズの切替え時間を少しでも短くするには、長パルス信号の印加時間を長くし、長パルス信号によってできるだけマクロポジションに近い位置までレンズホルダ10を変位させるようにすれば良い。ただし、このようにした場合、マクロポジションがノーマルポジションよりも鉛直下方に位置する場合など、レンズ駆動装置100の姿勢によっては、長パルス信号による推進力のみで、レンズホルダ10がマクロポジションまで到達してカバー70に当り、その反動でレンズホルダ10がカバー70から離れてしまう惧れがある(たとえば、図7(c)と同様の状態)。しかし、このような場合であっても、その後、短パルス信号が印加されることにより、その推進力でレンズホルダ10がマクロポジションまで到達するため、適正位置からのレンズの位置ずれが防止される。
【0076】
また、レンズホルダ10を駆動するためのパルス電流信号の波形は、図9の波形図に示すものに変更することができる。この変更例では、短パルス信号の幅(印加時間)が印加回数に伴って徐々に短くされる。この場合、短パルス信号が印加される周期は同じとされ、前半の短パルス信号ほど、印加時間が長く停止時間が短くされる。
【0077】
このような構成とすれば、マクロポジションから離れている間の短パルス信号よる推進力を大きくできるので、長パルス信号の印加によって停止した位置からマクロポジションまでのレンズホルダ10の到達時間を短縮できる。また、マクロポジションに接近した後の推進力を小さくできるので、レンズホルダ10をマクロポジションにソフトランディングさせることができる。
【0078】
なお、図9の例では、印加回数が一つ増えるに応じて短パルス信号の幅が小さくなるよう図示したが、たとえば、n回の印加回数毎に、短パルス信号の幅を小さくするようにしても良い。
【0079】
上記実施の形態では、ノーマルポジションからマクロポジションにレンズホルダ10を変位させることを例に挙げて説明を行ったが、マクロポジションからノーマルポジションにレンズホルダ10を変位させる場合にも、上記と同様の制御を行うことにより、レンズホルダ10をノーマルポジションに円滑かつ適正に位置づけることができる。ただし、マクロポジションからノーマルポジションにレンズホルダ10を変位させる場合は、ノーマルポジションからマクロポジションにレンズホルダ10を変位させる場合に比べ、レンズホルダ10の変位方向が逆であるため、図7(a)および図9に示す長パルス信号と短パルス信号は、極性を反転させて、コイル40に印加する必要がある。
【0080】
本実施の形態によれば、ノーマルポジションとマクロポジションの間のレンズの位置の切替えが電動で行えるので、ユーザによる替え操作だけでなく、たとえば、撮影距離に対してレンズの位置が適正であるか否かを検出することにより、自動でレンズの位置を切り替えることが可能となる。
【0081】
また、本実施の形態によれば、レンズホルダ10を、ベース30に当接させるだけでノーマルポジションに位置づけることができ、カバー70に当接させるだけでマクロポジションに位置づけることができるので、レンズホルダ10を容易に適正な位置に位置づけることができる。
【0082】
さらに、本実施の形態によれば、レンズホルダ10を、マクロポジションやノーマルポジションの手前の位置から短パルス信号によって徐々に変位させ、これらポジションに到達させることができるため、レンズホルダ10が、カバー70やベース30に強く当たることがなく、よって、レンズホルダ10が、カバー70やベース30に当たった反動で、カバー70やベース30から離れてしまうようなことが起こりにくく、また、耳障りとなる衝突音が発生することもない。
【0083】
さらに、本実施の形態によれば、磁石20と磁性板50との間に働く引力Fを利用して、レンズホルダ10をマクロポジションやノーマルポジションに保持するようにしているので、コイル40へ給電しておかなくても、レンズホルダ10をこれらのポジションに位置づけておくことができ、消費電力を低減することができる。
【0084】
以上、本発明の実施形態について説明したが、本発明はこれに限定されるものではなく、また、本発明の実施形態も、上記以外に種々の変更が可能である。
【0085】
<レンズ駆動装置の変更例>
図10は、他の実施の形態に係るレンズ駆動装置の分解斜視図である。図11は、アセンブルした後のレンズ駆動装置の構成を示す図である。同図(a)はアセンブルが完成した図であり、同図(b)は、同図(a)に示すレンズ駆動装置の内部状態が分かるように、カバー70を取り外した状態を示す図である。
【0086】
本実施の形態では、レンズホルダ10を移動させる際のガイド構造が、シャフト60、61と丸孔12、長孔13による構成ではなく、以下の通り、突条14と溝33bによる構成とされている。これら図10および図11に図示したその他の構成は、上記実施の構成と同様である。
【0087】
すなわち、レンズホルダ10において、4つの幅の狭い側面10bに、上下に延びる断面三角形状の突条14がそれぞれ形成されている。一方、これら側面10bに対向するガイド体33の側面には、突条14に係合するV字状の溝33bがそれぞれ形成されている。
【0088】
図11(b)に示すように、レンズホルダ10がベース30に装着されると、突条14が溝33b内に嵌まり込む。この状態で、レンズホルダ10が上下に移動すると、これに伴って突条14が溝33b内を摺動する。このような構成とすれば、ガイド構造を容易に設けることができる。
【0089】
<撮像装置の変更例>
図12は、他の実施の形態に係る撮像装置の概略構成を示す図である。この実施の形態では、レンズ駆動装置の姿勢を検出するための加速度センサ304が配されている。この加速度センサ304は、少なくも1軸方向の重力加速度を検出する機能を有する。加速度センサ304は、上記1軸方向がレンズの光軸方向となるように配されている。加速度センサ304からは、ベース30側に重力加速度が生じていると正の加速度信号が出力され、カバー70側に重力加速度が生じていると負の加速度信号が出力される。
【0090】
加速度センサ304からの加速度信号は、CPU301に入力される。CPU301は、正の加速度信号が大きいときには、レンズ駆動装置100が水平から上方向を向いていると判断し、負の加速度信号が大きいときには、レンズ駆動装置100が水平から下方向を向いていると判断する。また、CPU301は、加速度信号がゼロあるいはゼロに近いときには、レンズ駆動装置100が水平方向を向いていると判断する。
【0091】
メモリ305には、図13に示すような、レンズホルダ10をノーマルポジションからマクロポジションへ変位させるための3つのパルス電流信号の波形パターン(第1波形パターン、第2波形パターン、第3波形パターン)が記憶されている。第1波形パターン、第2波形パターン、第3波形パターンは、それぞれ、レンズ駆動装置100が上向き、横向き、下向きの場合に対応するものである。第1波形パターン、第2波形パターン、第3波形パターンは、順次、長パルス信号および短パルス信号の印加時間が短くなっている。すなわち、レンズホルダ10を変位させるために大きな推進力を要する状況にあるほど、長パルス信号および短パルス信号の印加時間が長くなっている。
【0092】
レンズホルダ10をマクロポジションへ変位させる際、CPU301は、レンズ駆動装置100の姿勢を判断し、レンズ駆動装置100が水平よりも上向きであれば、大きな推進力が必要である判定する。このとき、CPU301は、第1波形パターンのパルス電流信号がコイル40に印加されるよう、ドライバ303に制御信号を出力する。また、CPU301は、レンズ駆動装置100の姿勢が略水平の向きであると判断すると、ノーマルの推進力が必要であると判定し、第2波形パターンのパルス電流信号がコイル40に印加されるよう、ドライバ303に制御信号を出力する。さらに、CPU301は、レンズ駆動装置100の姿勢が水平よりも下向きであると判断すると、小さな推進力が必要である判定し、第3波形パターンのパルス電流信号がコイル40に印加されるよう、ドライバ303に制御信号を出力する。
【0093】
なお、レンズホルダ10をマクロポジションからノーマルポジションヘ変位させる場合、CPU301は、レンズ駆動装置100の姿勢が水平よりも上向きであれば、第3波形パターンのパルス電流信号をコイル40に印加させ、また、レンズ駆動装置100の姿勢が水平よりも下向きであれば、第1波形パターンのパルス電流信号をコイル40に印加させるよう、ドライバ303に制御信号を出力する。レンズ駆動装置100の姿勢が略水平の向きであるときは、上記の場合と同様、第2波形パターンのパルス電流信号がコイル40に印加される。なお、この場合も、マクロポジションからノーマルポジションに変位させる際のレンズホルダ10を変位方向は、ノーマルポジションからマクロポジションにレンズホルダ10を変位させる場合に対して逆であるため、第1、第2、第3の波形パターンによるパルス電流信号は、極性を反転させて、コイル40に印加する必要がある。
【0094】
このように、本実施の形態によれば、レンズ駆動装置100の姿勢に応じて、パルス電流信号(長パルス信号、短パルス信号)の印加時間が調整されるので、パルス信号が無駄に印加されるのを抑制することができ、その結果、駆動に要する消費電力を低減させることができる。
【0095】
なお、メモリ305に上記のような波形パターンを記憶するのではなく、加速度信号に応じて長パルス信号および短パルス信号の印加時間を算出するための演算式を記憶し、この演算式をもとに、撮像場面において検出された加速度信号から印加時間を算出するようにしても良い。このような構成とした場合にも、波形パターンを記憶する場合と同様、レンズ駆動装置100の姿勢に応じたパルス電流信号を、コイル40に印加することができる。
【0096】
また、長パルス信号による電流量に比べて複数回の短パルス信号による電流量はかなり小さいため、上記のようにレンズ駆動装置の姿勢に応じて波形パターンを変化させる場合には、短パルス信号よりも長パルス信号の印加時間を変化させることによって、大きな電力削減効果が得られる。したがって、このように波形パターンを調整する場合には、長パルス信号の印加時間のみを変化させ、短パルス信号の印加時間は一定のままとするようにしても良い。
【0097】
さらに、レンズ駆動装置100の姿勢を検出するために、加速度センサ304に変えて、その他公知の傾き検出用のセンサを利用することもできる。また、加速度センサーは、撮像装置側ではなく、小型カメラ本体側やカメラ付き携帯電話機側に配備しても良い。
【0098】
<オートフォーカス機能への適用例>
なお、本発明の撮像装置は、オートフォーカス用のレンズ駆動装置を搭載した撮像装置にも適用することができる。この場合、オートフォーカス用のレンズ駆動装置は、上記実施の形態のレンズ駆動装置100と同様の構成とすることができる。オートフォーカス用のレンズ駆動装置の場合、図3に示すノーマルポジションが、フォーカス調整動作の際のレンズのホームポジションになる。そして、このホームポジションから、オンフォーカス位置へとレンズホルダ10が駆動される。
【0099】
すなわち、オートフォーカス動作が開始されると、予め定められた回数のパルス電流信号がコイル40に印加され、レンズを保持したレンズホルダ10が、ホームポジションからレンズ光軸方向に徐々に変位される。1回のパルス電流信号によってレンズおよびレンズホルダ10が変位する度に、イメージセンサユニット202からの信号をもとに、レンズが捕らえた画像のコントラスト値が検出される。コントラスト値の検出は、全回数のパルス電流信号の印加によって、レンズおよびレンズホルダ10がホームポジションからフォーカス調整領域の終端位置に到達するまで繰り返される。このとき、コントラスト値は、レンズおよびレンズホルダ10がオンフォーカス位置にあるときに最大となる。
【0100】
しかる後、各回のコントラスト値が大小比較され、何回目のパルス電流信号によってコントラスト値が最大になったかが抽出される。そして、一旦、レンズがホームポジションに戻された後、抽出された回数分のパルス電流信号によって、レンズおよびレンズホルダ10が再びホームポジションから変位される。これにより、レンズが、コントラスト値が最大となった位置、すなわちオンフォーカス位置に位置づけられることとなる。
【0101】
かかるフォーカス引き込み動作において、レンズホルダ10をフォーカス調整領域の終端位置からホームポジションに復帰させる際には、図7(a)、図9、図13に示すような、長パルス信号と複数の短パルス信号とからなるパルス電流信号が用いられる。この場合、フォーカス調整領域の終端位置からホームポジションに復帰させる際のレンズホルダ10の変位方向は、上述のノーマルポジションからマクロポジションへと向かう際のレンズホルダ10の変位方向とは逆になっているため、図7(a)、図9、図13に示すパルス電流信号は、極性を反転した状態で、コイル40に印加される。これにより、レンズホルダ10がホームポジションに適正に位置づけられる。よって、オンフォーカス位置への引き込み動作に狂いが生じるのを防止でき、結果、フォーカス調整精度を向上させることができる。
【0102】
この他、本発明の実施の形態は、特許請求の範囲に示された技術的思想の範囲内において、適宜、種々の変更が可能である。
【図面の簡単な説明】
【0103】
【図1】実施の形態に係るレンズ駆動装置の構成を示す分解斜視図
【図2】実施の形態に係るレンズ駆動装置の構成を示す組立斜視図
【図3】実施の形態に係るレンズ駆動装置の駆動動作を説明する図
【図4】実施の形態に係るレンズホルダを保持するための構成を示す図
【図5】実施の形態に係る磁性板の変形例を示す図
【図6】実施の形態に係る撮像装置の構成を示す図
【図7】実施の形態に係るレンズ駆動装置の駆動制御について説明する図
【図8】実施の形態に係る短パルス信号による駆動時のレンズホルダの動きを示す図
【図9】実施の形態に係るレンズホルダを駆動するためのパルス電流信号の変更例を示す図
【図10】他の実施の形態に係るレンズ駆動装置の構成を示す分解斜視図
【図11】他の実施の形態に係るレンズ駆動装置の構成を示す組立斜視図
【図12】他の実施の形態に係る撮像装置の構成を示す図
【図13】他の実施の形態に係るレンズホルダを駆動するためのパルス電流信号を示す図
【符号の説明】
【0104】
10 レンズホルダ(ホルダ)
20 磁石
30 ベース(支持部、当接部)
40 コイル
50 磁性板(保持力付与部、磁性部材)
60、61 シャフト(保持力付与部)
70 カバー(支持部、当接部)
301 CPU(制御部)
303 ドライバ(駆動部)
305 加速度センサ(姿勢検出部)
【特許請求の範囲】
【請求項1】
レンズを保持するホルダと、
前記ホルダを、前記レンズの光軸方向に変位可能に支持する支持部と、
前記支持部に設けられ、前記ホルダが所定の基準位置に位置づけられたときに当該ホルダに当接する当接部と、
前記ホルダと前記支持部の何れか一方に配された磁石と、
前記磁石に対向するよう配置され、電流が印加されることにより前記磁石と相俟って前記ホルダに電磁駆動力を生じせしめるコイルと、
前記コイルへの給電が停止されたとき、前記磁石との間の磁力によって前記ホルダを給電停止後の位置に保持させるための磁性部材と、
前記コイルに電流信号を印加して前記ホルダを駆動制御する制御部とを備え、
前記制御部は、前記ホルダを前記基準位置まで変位させる際、前記コイルに対して、第1のパルス電流信号を印加した後、当該第1のパルス電流信号より印加時間が短い第2のパルス電流信号を複数回印加する、
ことを特徴する撮像装置。
【請求項2】
請求項1において、
前記撮像装置の姿勢に応じた検出信号を出力する姿勢検出部を備え、
前記制御部は、前記姿勢検出部からの検出信号に応じて、少なくとも前記第1のパルス電流信号の印加時間を調整する、
ことを特徴とする撮像装置。
【請求項3】
請求項1または2において、
複数回印加される前記第2のパルス電流信号を、後の回数になるに従って段階的に印加時間が短くなるように構成した、
ことを特徴とする撮像装置。
【請求項4】
請求項1ないし3の何れか一項において、
前記磁石と前記磁性部材は、互いに対向するよう、前記ホルダと前記支持部にそれぞれ配置され、
前記磁性部材の前記光軸方向の長さを、前記磁石の前記光軸方向の長さよりも長くした、
ことを特徴とする撮像装置。
【請求項1】
レンズを保持するホルダと、
前記ホルダを、前記レンズの光軸方向に変位可能に支持する支持部と、
前記支持部に設けられ、前記ホルダが所定の基準位置に位置づけられたときに当該ホルダに当接する当接部と、
前記ホルダと前記支持部の何れか一方に配された磁石と、
前記磁石に対向するよう配置され、電流が印加されることにより前記磁石と相俟って前記ホルダに電磁駆動力を生じせしめるコイルと、
前記コイルへの給電が停止されたとき、前記磁石との間の磁力によって前記ホルダを給電停止後の位置に保持させるための磁性部材と、
前記コイルに電流信号を印加して前記ホルダを駆動制御する制御部とを備え、
前記制御部は、前記ホルダを前記基準位置まで変位させる際、前記コイルに対して、第1のパルス電流信号を印加した後、当該第1のパルス電流信号より印加時間が短い第2のパルス電流信号を複数回印加する、
ことを特徴する撮像装置。
【請求項2】
請求項1において、
前記撮像装置の姿勢に応じた検出信号を出力する姿勢検出部を備え、
前記制御部は、前記姿勢検出部からの検出信号に応じて、少なくとも前記第1のパルス電流信号の印加時間を調整する、
ことを特徴とする撮像装置。
【請求項3】
請求項1または2において、
複数回印加される前記第2のパルス電流信号を、後の回数になるに従って段階的に印加時間が短くなるように構成した、
ことを特徴とする撮像装置。
【請求項4】
請求項1ないし3の何れか一項において、
前記磁石と前記磁性部材は、互いに対向するよう、前記ホルダと前記支持部にそれぞれ配置され、
前記磁性部材の前記光軸方向の長さを、前記磁石の前記光軸方向の長さよりも長くした、
ことを特徴とする撮像装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2009−204714(P2009−204714A)
【公開日】平成21年9月10日(2009.9.10)
【国際特許分類】
【出願番号】特願2008−44675(P2008−44675)
【出願日】平成20年2月26日(2008.2.26)
【出願人】(000001889)三洋電機株式会社 (18,308)
【Fターム(参考)】
【公開日】平成21年9月10日(2009.9.10)
【国際特許分類】
【出願日】平成20年2月26日(2008.2.26)
【出願人】(000001889)三洋電機株式会社 (18,308)
【Fターム(参考)】
[ Back to top ]