
撮像装置
【課題】位相差測距方式を採用する撮像装置であって、コンパクトでレリーズタイムラグが少なく、さらに、常に高精度な測距を行うことができる撮像装置を提供する。
【解決手段】第1の被写体像信号、及び、瞳分割されて形成された第2の被写体像並びに第3の被写体像をそれぞれ光電変換し、第2及び第3の被写体像信号を出力する撮像素子と、第1の被写体像信号を出力する撮像素子と同一の撮像素子が出力する第2及び第3の被写体像信号に基づいて、2像の間隔を演算する相関演算部と、ベスト像面位置であることを認識する認識部と、認識部の認識結果の情報と、相関演算部の演算結果とに基づいて、2像間隔を補正値として格納する補正値格納部と、第1の被写体像信号を撮像信号として取得する撮像信号取得部と、取得した撮像信号に基づいて画像データを生成する画像構成部とを有する装置とする。
【解決手段】第1の被写体像信号、及び、瞳分割されて形成された第2の被写体像並びに第3の被写体像をそれぞれ光電変換し、第2及び第3の被写体像信号を出力する撮像素子と、第1の被写体像信号を出力する撮像素子と同一の撮像素子が出力する第2及び第3の被写体像信号に基づいて、2像の間隔を演算する相関演算部と、ベスト像面位置であることを認識する認識部と、認識部の認識結果の情報と、相関演算部の演算結果とに基づいて、2像間隔を補正値として格納する補正値格納部と、第1の被写体像信号を撮像信号として取得する撮像信号取得部と、取得した撮像信号に基づいて画像データを生成する画像構成部とを有する装置とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、撮像装置に関するものである。
【背景技術】
【0002】
一般的に位相差オートフォーカス(以下、適宜「AF」という。)の測距精度は、AFセンサーが取り込める重心Fnoと焦点検出用画素の間隔とで決まっている。
従来例の撮像用画素と焦点検出用画素が2次元的に配列された素子を用いた撮像装置としては、以下の特許文献1に開示された構成が知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第3592147号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の撮像装置には、主に以下の2つの測距方式がある。
(1)コントラスト方式
(2)位相差方式
(1)のコントラスト方式では、フォーカシング状態を変えてウォブリングを行いながらコントラスト値を評価する、いわゆる山登り方式を採用している。このため、合焦時間が長い。
【0005】
また(2)の位相差方式では、原理的に1回の測距でデフォーカス量を検出できる。このため、合焦時間は短い。
位相差方式は、コンパクトでレリーズタイムラグが少ない、という利点を有している。
【0006】
位相差方式を採用している撮像装置において、レンズ交換をするとき、レンズデータが既知であり取得可能な場合、位相差AF時の補正値を算出することが可能である。これに対して、レンズ自体からデータを取得することができない場合、位相差AFの補正値を算出することが出来ない。
そこで、上述したコンパクトでありレリーズタイムラグが少ない、という利点を損なうことなく、さらに、高精度な位相差AFを行えることが望まれている。
【0007】
本発明は、上記に鑑みてなされたものであって、位相差測距方式を採用する撮像装置であって、コンパクトでレリーズタイムラグが少なく、さらに、常に高精度なフォーカシングを行うことができる撮像装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上述した課題を解決し、目的を達成するために、本発明の撮像装置は、
2次元に配列された複数の画素を有し、撮像光学系からの光束により形成された第1の被写体像信号、及び、撮像光学系からの光束のうち、瞳分割されて形成された第2の被写体像並びに第3の被写体像をそれぞれ光電変換し、第2の被写体像信号及び第3の被写体像信号を出力する撮像素子と、
第1の被写体像信号を出力する撮像素子と同一の撮像素子が出力する第2の被写体像信号及び第3の被写体像信号に基づいて、2像の間隔を演算する相関演算部と、
ベスト像面位置であることを認識する認識部と、
認識部の認識結果の情報と、相関演算部の演算結果とに基づいて、2像間隔を補正値として格納する補正値格納部と、
第1の被写体像信号を撮像信号として取得する撮像信号取得部と、
取得した撮像信号に基づいて画像データを生成する画像構成部と、
を有する。
【0009】
また、本発明の好ましい態様によれば、認識部は、撮像素子の同じ画素からの信号に基づいたコントラスト方式による測距結果と位相差方式による測距結果とを比較して、ベスト像面位置であることを認識することが望ましい。
【0010】
また、本発明の好ましい態様によれば、補正値格納部は、認識部がベスト像面位置と認識しているときの相関演算部の結果を補正値として格納することが望ましい。
【0011】
また、本発明の好ましい態様によれば、補正値格納部は、相関演算部の演算結果に基づいて第1の被写体像信号に対応する被写体迄の距離が無限遠と推測されるときの補正値と、距離が至近端と推測されるときの補正値と、距離が無限遠でも至近端でもないと推測されるときの補正値とを、それぞれ別々に格納することが望ましい。
【0012】
本発明によれば、位相差測距方式を採用する撮像装置であって、コンパクトでレリーズタイムラグが少なく、さらに、常に高精度なフォーカシングを行うことができる撮像装置を提供することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施形態に係るデジタルカメラの内部構成を示す図である。
【図2】本実施形態に係るデジタルカメラの射出瞳の構成を示す図である。
【図3】本実施形態における撮像素子の光電変換部の構成を示す図である。
【図4】本実施形態における撮像素子の隣り合う二つの画素の構造を示す断面図である。
【図5】本実施形態における撮像素子の内部構成を示す図である。
【図6】本実施形態における撮像素子の内部構成を示す図である。
【図7】撮像素子の構成(バリエーション1)を示す平面図である。
【図8】撮像素子の構成(バリエーション2)を示す平面図である。
【図9】撮像素子の構成(バリエーション3)を示す平面図である。
【図10】撮像素子の構成(バリエーション4)を示す平面図である。
【図11】本実施形態に係るデジタルカメラの構成を示す機能ブロック図である。
【図12】本実施形態に係るデジタルカメラの構成を示す他の機能ブロック図である。
【図13】エレメントカーブを説明する図である。
【図14】補正値を算出する手順を示すフローチャートである。
【図15】補正値を算出する手順を示す他のフローチャートである。
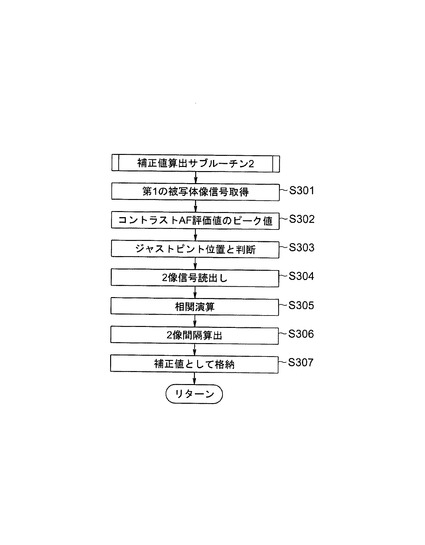
【図16】補正値を算出する手順を示す別のフローチャートである。
【発明を実施するための形態】
【0014】
以下に、本発明に係る撮像装置の実施形態を図面に基づいて詳細に説明する。なお、以下の実施形態によりこの発明が限定されるものではない。
【0015】
(デジタルカメラ)
まず、本発明の実施形態に係る撮像装置を備えたカメラについて説明する。
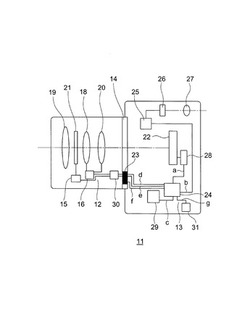
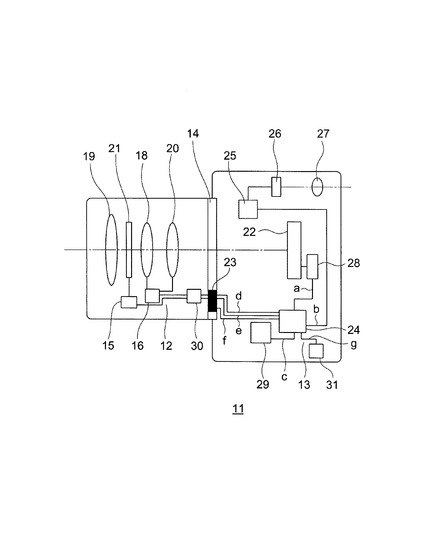
図1は、本発明の実施形態に係るデジタルカメラ11の内部構成を示す図である。
デジタルカメラ11は、交換レンズ12と、カメラボディ13と、から構成され、交換レンズ12はマウント部14によりカメラボディ13に装着される。
【0016】
交換レンズ12は、レンズ制御部30、レンズ駆動部16、絞り駆動部15、ズーミング用レンズ18、レンズ19、フォーカシング用レンズ20、及び、絞り21を備えている。レンズ制御部30は、マイクロコンピューターとメモリなどの周辺部品から成り、フォーカシング用レンズ20と絞り21の駆動制御、絞り21、ズーミング用レンズ18およびフォーカシング用レンズ20の状態検出、並びに、ボディ制御部24に対するレンズ情報の送信とカメラ情報の受信などを行う。
また、レンズの状態の他に、レンズデータそのものに関する諸元値は、レンズデータ格納部32に格納されている。
【0017】
絞り駆動部15は、レンズ制御部30を介して、ボディ制御部24からの信号に基づいて、絞り21の開口径を制御する。また、レンズ駆動部16は、レンズ制御部30を介して、ボディ制御部24からの信号に基づいて、ズーミング用レンズ18、フォーカシング用レンズ20を駆動する。
【0018】
カメラボディ13は撮像素子22、ボディ制御部24、液晶表示素子駆動回路25、液晶表示素子26、接眼レンズ27、メモリーカード29などを備えている。撮像素子22には後述する画素が二次元状に配列されており、交換レンズ12の予定結像面に配置されて交換レンズ12により結像される被写体像を撮像する。撮像素子22の所定の焦点検出位置には焦点検出用画素(以下、適宜「AF用画素」という)が配列される。
【0019】
ここで、交換レンズ12は撮像光学系に対応し、撮像素子22は撮像素子に対応する。
【0020】
ボディ制御部24はマイクロコンピューターとメモリなどの周辺部品から構成され、撮像素子駆動回路28を介して、撮像素子22からの画像信号の読み出し、画像信号の補正、交換レンズ12の焦点調節状態の検出、レンズ制御部30からのレンズ情報の受信とカメラ情報(デフォーカス量)の送信、デジタルカメラ全体の動作制御などを行う。ボディ制御部24とレンズ制御部30は、マウント部14の電気接点部23を介して通信を行い、各種情報の授受を行う。
【0021】
液晶表示素子駆動回路25は、液晶ビューファインダーの液晶表示素子26を駆動する。撮影者は接眼レンズ27を介して液晶表示素子26に表示された像を観察する。メモリーカード29はカメラボディ13に脱着可能であり、画像信号を格納記憶する可搬記憶媒体である。
【0022】
交換レンズ12を通過して撮像素子22上に形成された被写体像は、撮像素子22により光電変換され、その出力はボディ制御部24へ送られる。ボディ制御部24は、撮像素子22上のAF用画素の出力データ(第1像信号、第2像信号)に基づいて所定の焦点検出位置におけるデフォーカス量に基づきレンズ駆動量を算出し、このレンズ駆動量をレンズ制御部30を介して、レンズ駆動部16へ送る。また、ボディ制御部24は、撮像素子22の出力に基づいて生成した画像信号をメモリーカード29に格納するとともに、画像信号を液晶表示素子駆動回路25へ送り、液晶表示素子26に画像を表示させる。
【0023】
カメラボディ13には不図示の操作部材(シャッターボタン、焦点検出位置の設定部材など)が設けられており、これらの操作部材からの操作状態信号をボディ制御部24が検出し、検出結果に応じた動作(撮像動作、焦点検出位置の設定動作、画像処理動作)の制御を行う。
【0024】
レンズ制御部30は、レンズ情報をフォーカシング状態、ズーミング状態、絞り設定状態、絞り開放F値などに応じて変更する。具体的には、レンズ制御部30は、レンズ18及びフォーカシング用レンズ20の位置と絞り21の絞り位置をモニターし、モニター情報に応じてレンズ情報を演算すること、あるいは予め用意されたルックアップテーブル、例えばレンズデータ格納部32からモニター情報に応じたレンズ情報を選択する。レンズ制御部30は、受信したレンズ駆動量に基づいてフォーカシング用レンズ20を不図示のモーター等の駆動源により合焦点へと駆動する。
【0025】
(撮像素子の構成)
上述したデジタルカメラ11の構成は、同一の符号を用いる構成は、以下の全ての実施例において共通する。次に、デジタルカメラ11が有する撮像装置の撮像素子22の構成について説明する。
【0026】
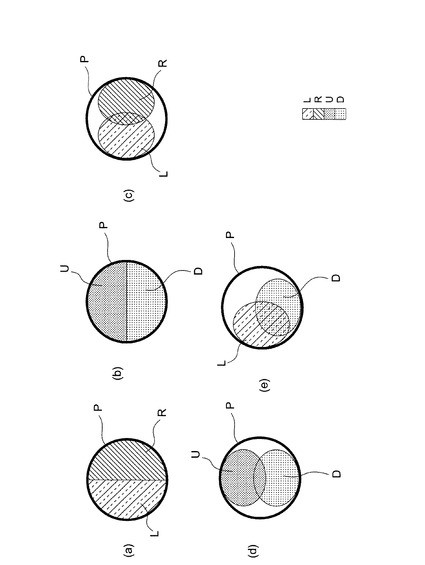
図2(a)〜(e)は、本発明の実施形態に係る撮像装置の射出瞳の構成を示す図である。デジタルスチルカメラ11における射出瞳Pは、図2(a)〜(e)に示すように、左右上下のうちの少なくとも2種類の瞳領域に対応する焦点検出用画素を有する。
具体例としては次の(1)〜(5)のとおりである。
【0027】
(1)射出瞳Pを縦に2分割して、左側瞳検出用画素Lと右側瞳検出用画素Rを配置したもの(図2(a))
(2)射出瞳Pを横に2分割して、上側瞳検出用画素Uと下側瞳検出用画素Dを配置したもの(図2(b))
(3)左側瞳検出用画素Lと右側瞳検出用画素Rを左右に配置して、その一部を重ねたもの(図2(c))
(4)上側瞳検出用画素Uと下側瞳検出用画素Dを上下に配置して、その一部を重ねたもの(図2(d))
(5)左側瞳検出用画素Lと下側瞳検出用画素Dを任意の位置に配置して、その一部を重ねたもの(図2(e))
【0028】
なお、測距用瞳の形状は、半円形状、楕円形状としたが、これに限定されず、他の形状、例えば矩形状、多角形状にすることもできる。
また、図2(a)と(b)を組み合わせて上下左右の焦点検出用画素を配置してもよい、図2(c)と(d)を組み合わせて上下左右の焦点検出用画素を配置してもよい、さらに、図2(c)と(e)を組み合わせて左右、斜め線検出の焦点検出用画素を配置してもよいが、これに限定されるものではない。
【0029】
本実施形態の撮像装置では、瞳が異なる領域を有し、その領域の1つを透過した光束を受光する光電変換部の出力から得られる第1像信号と、もう1つの領域を透過した光束を受光する光電変換部の出力から得られる第2像信号と、に基づいて位相差を検出し、撮影レンズの焦点状態を検出する。
以下、図3〜図6を参照して、具体的な射出瞳の分割例について説明する。
【0030】
(光電変換部の分割)
まず、図3を参照して、撮像素子22の光電変換部を分割することによって射出瞳を分割する例を説明する。
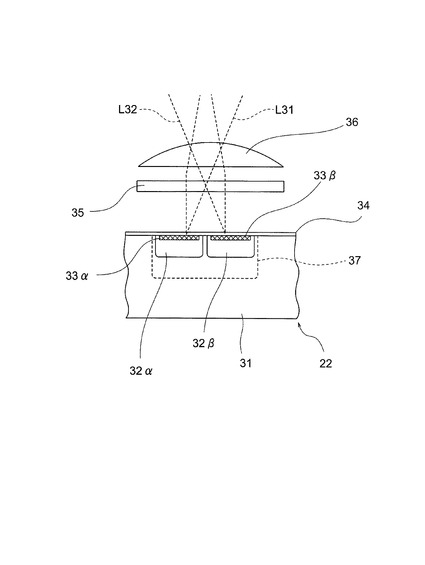
図3は、撮像素子22の光電変換部の構成を示す図である。
撮像素子22は、基板内に形成されたP型ウエル31、P型ウエル31と共に光電荷を発生させ蓄積するn型領域32α、32β、n型領域32α、32βに蓄積されている光電荷が転送される不図示のフローティングディフュージョン部(以下、「FD部」と称する。)、n型領域32α、32βに蓄積された光電荷をFD部へ効率よく転送するために光電荷を収集する表面p+層33α、33β、FD部へ光電荷を転送するための転送ゲート(不図示)、ゲート絶縁膜であるSiO2膜34、ベイヤ配列のカラーフィルタ35、及び、被写体からの光を集めるマイクロレンズ36、を備える。
【0031】
マイクロレンズ36は、交換レンズ12(図1)の瞳と表面p+層33α、33βとが、概略共役になるような形状及び位置に形成されている。光電荷は、模式的には、領域37で発生する。
【0032】
図3に示す例では、光電変換部が、n形領域32α及び表面p+層33αと、n形領域32β及び表面p+層33βと、に分割されており、これにより射出瞳が分割される。光線L31、L32は、n形領域32α及び表面p+層33αと、n形領域32β及び表面p+層33βと、にそれぞれ入射する。
【0033】
(開口部を偏心)
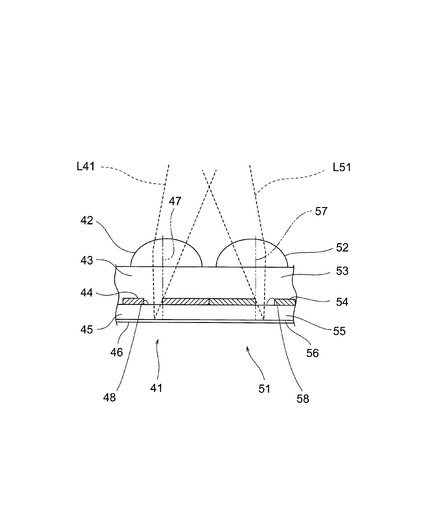
次に、図4を参照して、撮像素子22の画素の開口部を光電変換素子の中心に対して偏心させることによって射出瞳を分割する例を説明する。
図4は、撮像素子22の隣り合う二つの画素の構造を示す断面図である。
【0034】
画素41は、最上部から、順に、マイクロレンズ42、マイクロレンズ42を形成するための平面を構成するための平滑層43、色画素の混色防止のための遮光膜44、色フィルタ層をのせる表面を平らにするための平滑層45、及び、光電変換素子46が配置されている。画素51も画素41と同様に、最上部から、順に、マイクロレンズ52、平滑層53、遮光膜54、平滑層55、及び、光電変換素子56が配置されている。
【0035】
さらに、これらの画素41、51においては、遮光膜44、54が、光電変換素子46、56中心部47、57から外側に偏心した開口部48、58をそれぞれ有している。
【0036】
図4に示す例では、撮像素子22の画素の開口部を光電変換素子の中心に対して偏心させている。このため、光線L41、L51は、光電変換素子46、56にそれぞれ入射することから、射出瞳が分割される。
【0037】
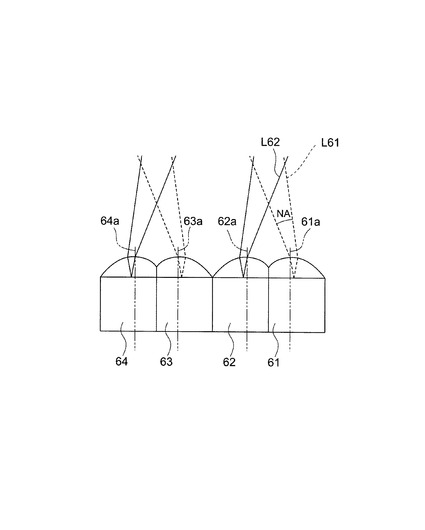
つづいて、図5を参照して、レンズを偏心させることによって射出瞳を分割する例を説明する。図5は、撮像素子の内部構成を示す図である。
図5の撮像素子においては、それぞれの画素の上のオンチップレンズ61、62、63、64が独立して構成されている。
図5においては、画素集合Aの画素のオンチップレンズ61、63の光軸61a、63aは、画素の中心から左側にずれている。また、画素集合Bの画素のオンチップレンズ62、64の光軸62a、64aは画素の中心から右側にずれている。
2つの画素集合A、Bからの出力を比較することで、レンズ18のフォーカス量を算出することができる。
【0038】
オンチップレンズ61、62、63、64では、屈折力と光軸61a、62a、63a、64aの位置等の形状という2つのパラメータを独立してコントロールすることができる。画素数が十分多ければ、画素集合Aと画素集合Bは、同様の光の強度分布を得ることができ、これを利用して位相差AFを行うことができる。この時、画面全体でのデフォーカス量を検出できるので、被写体の3次元情報を取得することができる。
【0039】
図5に示す例では、撮像素子22のオンチップレンズを画素の中心に対して偏心させている。このため、光線L61、L62は、オンチップレンズ61、62にそれぞれ入射し、これにより射出瞳が分割される。
【0040】
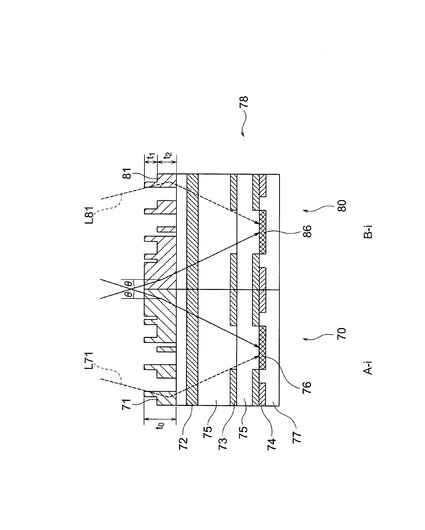
次に、図6を参照しつつ、DML(デジタルマイクロレンズ)を用いて射出瞳を分割する例を説明する。図6は、撮像素子の内部構造を示す断面図である。
図6に示す撮像素子では、オンチップレンズをDMLで構成している。画素70と画素80はそれぞれ異なる領域からの光束を受光する隣り合った画素である。
【0041】
図6において、撮像素子は、DML71、81、カラーフィルタ72、アルミニウム配線73、信号伝送部74、平坦化層75、受光素子76、86(例えばSiフォトダイオード)、及び、Si基板77を備える。図6に示すように、アルミニウム配線73、信号伝送部74、平滑化層75、受光素子76、86、及び、Si基板77は、半導体集積回路78を構成する。ここで、画素70と画素80の構成は、DML71、81以外は同様である。
【0042】
図6は、入射光束全体のうち、受光素子76、86にそれぞれ入射する光束の様子を示している。DML71、81を用いることにより、光束L71、L81は、画素70の受光素子76と画素80の受光素子86にそれぞれ入射し、射出瞳が分割される。
【0043】
撮像素子(イメージャ)としては、例えば、CCD(charge coupled device)、CMOS(Complementary Metal Oxide Semiconductor)、裏面照射型CMOS、1画素中でR、G、B全色を3層で取り込むことのできるセンサー(Forveon X3)を用いることができる。
【0044】
以下の実施例では、焦点検出用画素は、光電変換部の撮影レンズ側に形成されたオンチップレンズを画素の中心から偏心させることによって、撮影レンズの瞳の異なる位置を透過した光束を受光するように構成されている。瞳分割の手段としては、上述のように、画素中心に対して遮光部材を用いて開口部を偏心させたものや、DMLを用いたもの、1画素中に光電変換部を2つ設けたものでもよい。
【0045】
焦点検出用画素は、撮影レンズの瞳の異なる位置を透過した光束を受光するように構成している。このため、焦点検出用画素からの信号レベルは、焦点検出用画素近傍の撮像用画素から出力される信号レベルと異なってしまうおそれがある。焦点検出用画素の位置における画像用の信号を得る為には、以下の(1)又は(2)の方法をとることが好ましい。
(1)焦点検出用画素の信号を周囲の撮像用画素の信号レベルと同等となるようにゲインを調整し、焦点検出用画素の位置における画像用信号とする。
(2)焦点検出用画素の信号および焦点検出用画素近傍の撮像用画素の信号に基づいて画素補間を行い、焦点検出用画素の位置における画像用信号とする。
【0046】
ゲイン調整の方法については、次のように行う。
まず、焦点検出用画素から出力されたままの信号レベルと、焦点検出用画素近傍の撮像用画素から出力されたままの信号レベルと、を比較する。つづいて、焦点検出用画素から出力される信号レベルを近傍の撮像用画素から出力される信号レベルに近づけるようにゲインを調整する。その後、焦点検出用画素の信号をゲイン調整し得られた信号を画像信号としてデモザイキングを行い、最終画像を得る。
【0047】
画素補間の方法については、以下の(a)〜(c)のいずれかが好ましいが、これらに限定されず、単純平均演算(重み付きも含む)だけでなく、線形補間、2次以上の多項式で補間、メディアン処理などで求めてもよい。
(a)焦点検出用画素の位置における信号を、焦点検出用画素近傍の撮像用画素の信号に基づいて補間し、補間することで得られた信号を焦点検出用画素の位置の画像信号としてデモザイキングを行い、最終画像を得る。
(b)焦点検出用画素の位置における信号を、焦点検出用画素の信号と焦点検出用画素近傍の撮像用画素の信号とに基づいて補間し、補間することで得られた信号を焦点検出用画素の位置の画像信号としてデモザイキングを行い、最終画像を得る。
(c)焦点検出用画素の位置における信号を、焦点検出用画素近傍の撮像用画素の信号に基づいて補間し、補間することで得られた信号と焦点検出用画素の位置の信号とに基づいて補間し、補間することで得られた信号を焦点検出用画素の位置の画像信号としてデモザイキングを行い、最終画像を得る。
【0048】
撮像素子の複数の画素には、複数の色フィルタがそれぞれ配置されている。後述する実施例3、4では、複数の色フィルタの透過特性は、R(赤)、G(緑)、B(青)の3通りとしている。
Bフィルタは、R、G、Bの異なる透過特性のうち、最も短波長側の透過特性をもつ色フィルタであり、Rフィルタは、最も長波長側の透過特性を持つ色フィルタであり、Gフィルタは、それ以外の透過特性を持つものである。
なお、複数の色フィルタは、少なくとも可視域の一部を含み、異なる透過特性を少なくとも3通り有していれば、ほかの組合せでも良い。
【0049】
焦点検出用画素は、複数の色フィルタのうち最も輝度信号に重み付けを行う色フィルタとして、Gフィルタを用いて、入射する光束の入射方向を制限している。
なお、焦点検出用画素は、Gフィルタに限らず、複数の色フィルタのうち最も輝度信号に重み付けを行う色フィルタ、又は、最も透過率が高い色フィルタが配置される画素のうち少なくとも1部が、入射する光束の入射方向を制限するよう構成することができる。
【0050】
(画素配列のバリエーション1)
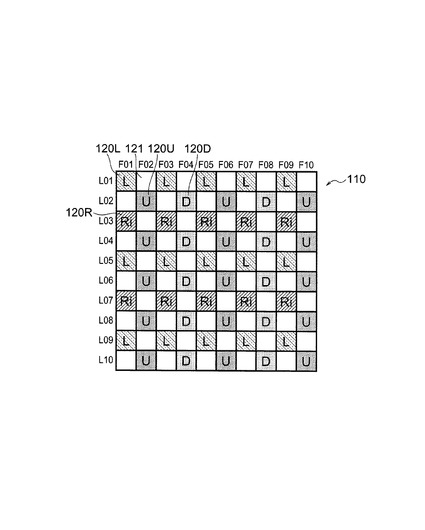
図7は、第1実施形態のイメージャにおける画素配置を概念的に示す平面図である。
図7に示すイメージャ(撮像装置)は、図3、図4、図5、図6で示した画素において、各画素中心と各光電変換領域の瞳の中心、または面積重心とを上方向、下方向、右側方向、左側方向にずらした画素、の組合せで構成されている。
【0051】
図7は、各画素の光軸方向から望んだときの光電変換領域を示したものである。
図7では、縦10画素(L01〜L10)、横10画素(F01〜F10)で合計100画素の例を示している。しかしながら、画素数はこれに限るものでなく、例えば合計画素が1000万画素を超えるものでも構わない。
【0052】
図7に示す例では、画素中心に対し光電変換領域の面積中心のずれている方向が右側と左側と上側と下側の4種類がある。以下の説明では、それぞれを右画素120R、左画素120L、上画素120U、下画素120Dと称することとする。
【0053】
図7において、L01の行では、左から(F01から)順に、左画素120L、撮像用画素121、左画素120L、撮像用画素121、が繰り返し配置されている。
L02の行では、左から順に、撮像用画素121、上画素120U、撮像用画素121、下画素120D、が繰り返し配置されている。
L03の行では、左から順に、右画素120R、撮像用画素121、右画素120R、撮像用画素121、が繰り返し配置されている。
L04の行では、左から順に、撮像用画素121、上画素120U、撮像用画素121、下画素120D、が繰り返し配置されている。
L05以降の行は、L01、L02、L03、L04のパターンを繰り返す配置になっている。
【0054】
図7の配置をF01〜10の列から見ると次のようになる。
F01の列では、上から(L01から)順に、左画素120L、撮影用画素121、右画素120R、撮影用画素121、が繰り返し配置されている。
F02の列では、上から順に、撮影用画素121、上画素120U、撮影用画素121、上画素120U、が繰り返し配置されている。
F03以降の列は、F01、F02のパターンを繰り返す配置になっている。
【0055】
以下の説明においては、特定の画素を示すときに、行番号L01〜L10と列番号F01〜F10を並べて表す。例えば、L01の行のうち、F01の列に対応する画素を「L01F01」で表す。
【0056】
図7に示す例では、例えば、L01F01(左画素120L)と、L02F02(上画素120U)とL03F01(右画素120R)とL02F04(下画素120D)とのいずれかの画素とは、画素ピッチから算出される画素間距離より、瞳の中心間距離または重心間距離が狭い構成となる。
【0057】
第1実施形態の撮像装置では、左画素120Lから構成されるセル群と、右画素120Rから構成される別のセル群と、のそれぞれの出力信号(測距のための信号)から、位相差情報を算出して光学系のフォーカスを調整させることができる。
【0058】
例えば、L01の行の左画素120LであるL01F01、L01F03、L01F05、L01F07、L01F09から得られる出力波形と、L03の行の右画素120Rである、L03F01、L03F03、L03F05、L03F07、L03F09から得られる出力波形と、を比較することで、所謂位相差検出式によりデフォーカス情報や合焦点位置情報が取得できる。
【0059】
(画素配列のバリエーション2)
次に、撮像装置が備える撮像素子の他の構成例について説明する。
【0060】
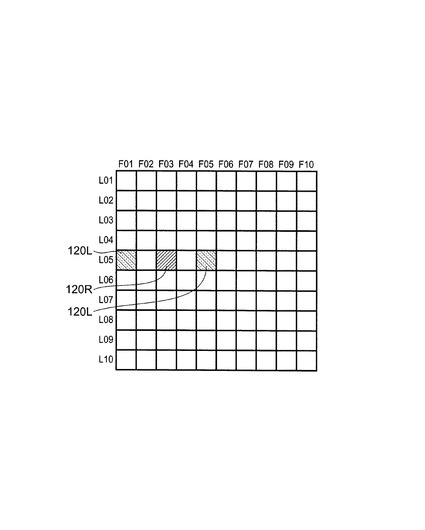
図8の配置において、L05F01画素とL05F05画素とは、左側瞳検出用画素である。また、L05F03画素は、右側瞳検出用画素である。
【0061】
これにより、精度の高い焦点検出を行うことができる。
【0062】
(画素配列のバリエーション3)
次に、撮像装置が備える撮像素子の他の構成例について説明する。
【0063】
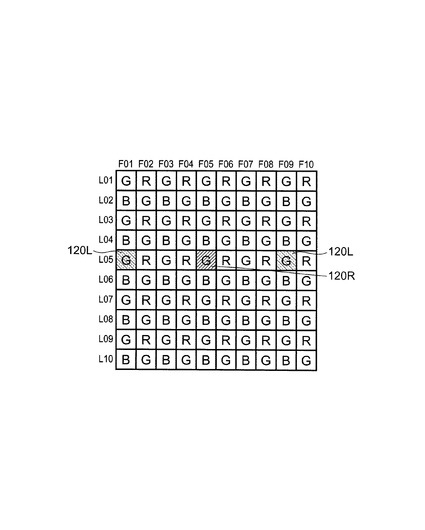
図9のカラーフィルタの配置は、L01F01画素を緑色のフィルタG、L01F02画素を赤色のフィルタRとして、横方向に、これらの組合せパターンを繰り返している。
【0064】
また、L02F01画素を青色のフィルタB、L02F02画素を緑色のフィルタGとして、横方向に、これらの組合せパターンを繰り返している。
そして、L01列のパターンと、L02列のパターンとを、縦方向に、繰り返している。
【0065】
ここで、緑色のフィルタGが配置されている、L05F01画素とL05F09画素とは、左側瞳検出用画素である。また、L05F05画素は、右側瞳検出用画素である。
【0066】
これにより、被写体の色に関わらず精度の高い焦点検出を行うことができる。尚、カラーフィルタと光電変換領域の画素中心からのズレ方向の組み合わせはこれに限る必要ない。
【0067】
(画素配列のバリエーション4)
次に、撮像装置が備える撮像素子のさらに他の構成例について説明する。
【0068】
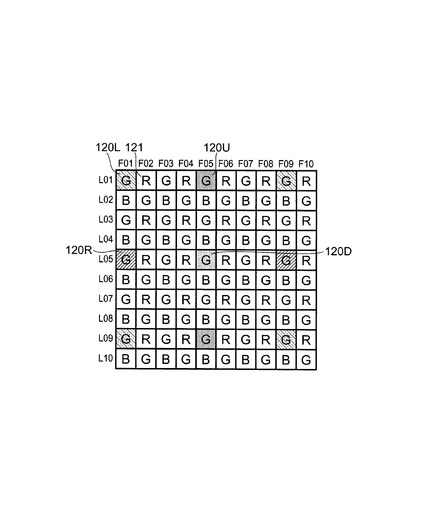
図10のカラーフィルタの配置は、L01F01画素を緑色のフィルタG、L01F02画素を赤色のフィルタRとして、横方向に、これらの組合せパターンを繰り返している。
【0069】
また、L02F01画素を青色のフィルタB、L02F02画素を緑色のフィルタGとして、横方向に、これらの組合せパターンを繰り返している。
そして、L01列のパターンと、L02列のパターンとを、縦方向に、繰り返している。
【0070】
ここで、緑色のフィルタGが配置されている、L01F01画素と、L01F09画素と、L09F01画素と、L09F09画素とは、左側瞳検出用画素である。
また、L05F01画素と、L05F09画素とは、右側瞳検出用画素である。
また、L01F05画素と、L09F05画素とは、上側瞳検出用画素である。
さらに、L05F05画素は、下側瞳検出用画素である。
【0071】
これにより、被写体の色に関わらず精度の高い焦点検出を行うことができる。尚、カラーフィルタと光電変換領域の画素中心からのズレ方向の組み合わせはこれに限る必要はない。
【0072】
(機能ブロックの説明)
本実施形態では、認識部138(図11、図12)は、後述するように、ベスト像面位置を認識する。この認識に関して、以下の2通りの手順(a)、(b)がある。
(a)撮影者がマニュアルフォーカス(以下、適宜「MF」)モードを用いてベスト像面位置、つまり最もピントが合っている状態を認識する。
(b)コントラストAF方式を用いてベスト像面位置を認識する。
【0073】
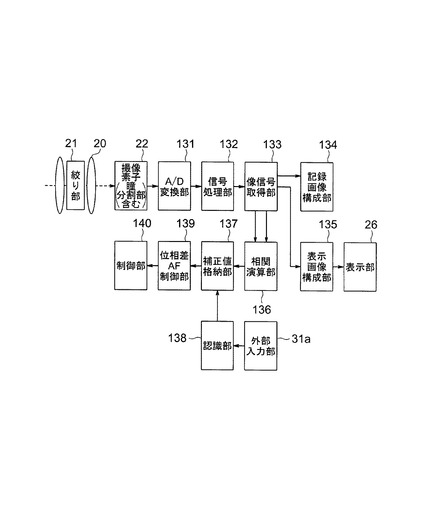
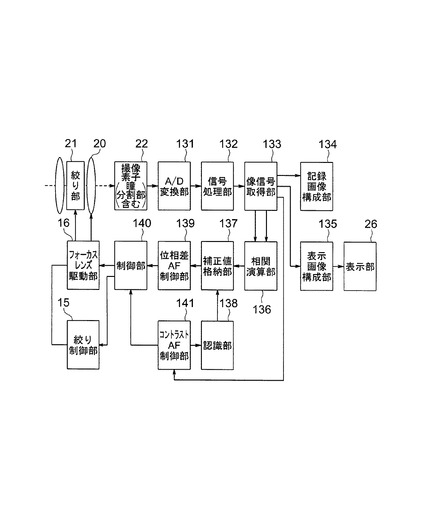
図11は、交換レンズ12がAFに対応していないAF不可レンズの場合に、MFモードを用いて、ベスト像面を認識する撮像装置11のボディ制御部24の機能ブロックを示す図である。なお、図1で示す構成と同一の構成には、同じ参照番号を付し、重複する説明は省略する。
【0074】
撮像素子22からは、撮影用画素からの信号、焦点検出用画素からの信号、第1像信号、及び第2像信号のいずれの信号であるかを識別するための信号がラインaを経由してA/D変換部131へ入力する。
【0075】
撮像素子22からは、撮影用画素からの信号、焦点検出用画素からの信号、第1像信号、及び第2像信号のいずれの信号であるかを識別するための信号がA/D変換部131へ入力する。
【0076】
像信号取得部(撮像信号取得部)133は、A/D信号処理部131と信号処理部132を経由した信号を取得する。撮影用画素からの信号は、表示画像構成部135により、液晶表示素子駆動回路25へ出力される。液晶表示素子(表示部)26は、撮影用の画像を表示する。撮影者は、接眼レンズ27を通して撮影用の画像を観察できる。
【0077】
記録画像構成部134は、撮影用画素からの信号に基づいて記録画像データを構成する。記録画像データは、メモリーカード29に格納される。
記録画像構成部134と表示画像構成部135とは、取得した撮像信号に基づいて画像データを生成する画像構成部に対応する。
【0078】
また、焦点検出用画素からの信号は、像信号取得部133から相関演算部136へ出力される。
【0079】
撮像素子22は、2次元に配列された複数の画素を有し、撮像光学系であるレンズ18、19、20からの光束により形成された第1の被写体像信号、並びに、撮像光学系からの光束のうち、瞳分割されて形成された第2の被写体像及び第3の被写体像をそれぞれ光電変換し、第2の被写体像信号及び第3の被写体像信号を出力する。詳細は後述する。
【0080】
相関演算部136は、第1像信号、及び第2像信号に基づいて相関演算を行う。つまり、相関演算部136は、第1の被写体像信号を出力する撮像素子22と同一の撮像素子22が出力する第2の被写体像信号及び第3の被写体像信号に基づいて、2像の間隔を演算する。
【0081】
また、補正値格納部137は、認識部138の認識結果の情報と、相関演算部137の演算結果とに基づいて、2像間隔を補正値として格納する
【0082】
補正値格納部137は、認識部138の認識結果の情報と、相関演算部137の演算結果とに基づいて、2像間隔を補正値として格納する。
【0083】
ここでは、補正値格納部137は、認識部138がベスト像面位置と認識しているときの相関演算部137の結果を補正値として格納する。
これにより、位相差AFとの結果を補正して、マニュアルフォーカスモードによるピント合わせの結果に一致させることができる。
【0084】
図12は、交換レンズ12がAFに対応しているAFレンズの場合に、コントラストAFモードを用いて、ベスト像面を認識する撮像装置11のボディ制御部24の機能ブロックを示す図である。なお、図1で示す構成と同一の構成には、同じ参照番号を付し、重複する説明は省略する。
【0085】
撮像素子22からは、撮影用画素からの信号、焦点検出用画素からの信号、第1像信号、及び第2像信号のいずれの信号であるかを識別するための信号がラインaを経由してA/D変換部131へ入力する。
【0086】
撮像素子22からは、撮影用画素からの信号、焦点検出用画素からの信号、第1像信号、及び第2像信号のいずれの信号であるかを識別するための信号がA/D変換部131へ入力する。
【0087】
像信号取得部(撮像信号取得部)133は、A/D信号処理部131と信号処理部132を経由した信号を取得する。撮影用画素からの信号は、表示画像構成部135により、液晶表示素子駆動回路25へ出力される。液晶表示素子(表示部)26は、撮影用の画像を表示する。撮影者は、接眼レンズ27を通して撮影用の画像を観察できる。
【0088】
記録画像構成部134は、撮影用画素からの信号に基づいて記録画像データを構成する。記録画像データは、メモリーカード29に格納される。
記録画像構成部134と表示画像構成部135とは、取得した撮像信号に基づいて画像データを生成する画像構成部に対応する。
【0089】
また、焦点検出用画素からの信号は、像信号取得部133から相関演算部136へ出力される。
【0090】
撮像素子22は、2次元に配列された複数の画素を有し、撮像光学系であるレンズ18、19、20からの光束により形成された第1の被写体像信号、並びに、撮像光学系からの光束のうち、瞳分割されて形成された第2の被写体像及び第3の被写体像をそれぞれ光電変換し、第2の被写体像信号及び第3の被写体像信号を出力する。
【0091】
相関演算部136は、第1像信号、及び第2像信号に基づいて相関演算を行う。つまり、相関演算部136は、第1の被写体像信号を出力する撮像素子22と同一の撮像素子22が出力する第2の被写体像信号及び第3の被写体像信号に基づいて、2像の間隔を演算する。
【0092】
また、補正値格納部137は、認識部138の認識結果の情報と、相関演算部137の演算結果とに基づいて、2像間隔を補正値として格納する。
【0093】
ここで、コントラストAFモードにより、ベスト像面位置となるようにフォーカシングする。
コントラストAF制御部141は、制御部140を介して、フォーカスレンズ駆動部16、絞り制御部15を制御する。コントラスト方式では、フォーカシング状態を変えながらコントラスト値を評価する、いわゆる山登り方式を採用している。これにより、撮像した画像のコントラストが最も高い状態を検出する。
この状態を、認識部138は、ベスト像面位置であることを認識する。
補正値格納部137は、認識部138の認識結果の情報と、相関演算部137の演算結果とに基づいて、2像間隔を補正値として格納する。
【0094】
認識部138は、撮像素子22の同じ前記画素からの信号に基づいたコントラストAF方式による測距結果と位相差AF方式による測距結果とを比較して、ベスト像面位置であることを認識する。
【0095】
補正値格納部137は、ベスト像面位置から所定距離ずれた位置における2像間隔を推定し、所定距離であるずれ量と、推定された2像間隔と、所定距離ずれた位置における相関演算結果と、に基づいて補正値を算出し、補正値として格納する。
これにより、位相差AFとの結果を補正して、コントラストAFモードによるピント合わせの結果に一致させることができる。
【0096】
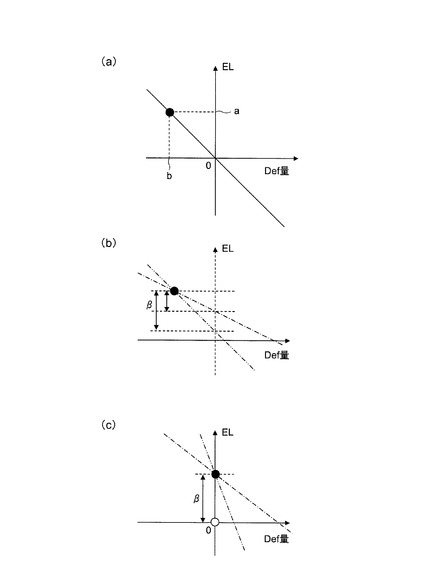
次に、補正値による補正の内容を説明する。図13(a)、(b)、(c)は、デフォーカス量(横軸)と、2像間隔(縦軸)との比例関係(以下、適宜、「デフォーカスエレメントカーブ」という。)を示す図である。
【0097】
図13(a)は、従来の位相差AFについてデフォーカスエレメントが既知の場合を示している。
相関演算により2像間隔(EL)が算出される。例えば、2像間隔は所定の距離aである。また、2像間隔に対応するデフォーカス量bが得られる。
このデフォーカス量に基づき、レンズ駆動量を算出し、レンズを駆動する。
【0098】
ここで、相関演算から得られるデフォーカスエレメントカーブの切片は0(ゼロ)を通らない。そのため、補正値を用いて、切片が0(ゼロ)を通るように補正している。
一般的にこの補正値は、撮影時に演算して求めるものではなく、データとして格納されている。
【0099】
図13(b)は、従来構成において、デフォーカスエレメントが未知の場合を示している。
デフォーカスエレメントカーブが未知のため、傾き、切片が未知である。1ポイントの相関演算結果では、傾きと切片は、算出できない。つまり、補正値が算出できない。
なお、1点鎖線、2点鎖線で示す直線を、未知のデフォーカスエレメントカーブの参考として示している。
【0100】
図13(c)は、本実施形態において、デフォーカスエレメントが未知の場合を示している。
デフォーカスエレメントカーブが未知のため、傾きと切片とは、未知である。上述したように、1ポイントの相関演算結果では、傾きと切片は算出できない。つまり、補正値が算出できない。
本実施形態では、認識部138より、ベスト像面位置を認識することで、デフォーカス量0(ゼロ)が定義できる。ベスト像面の認識は、上述した2つの機能ブロック図のように、MFモードや、コントラストAFモードを用いて行う。
このデフォーカス量0(ゼロ)の位置における相関演算結果から、切片が算出可能となる。つまり、補正値βを算出可能となる。
【0101】
切片が算出できれば、デフォーカスエレメントカーブの傾きは未知であっても、ベスト像面位置での2像間隔ELは、必ず0(ゼロ)となる。
なお、1点鎖線、2点鎖線で示す直線を、未知のデフォーカスエレメントカーブの参考として示している。
【0102】
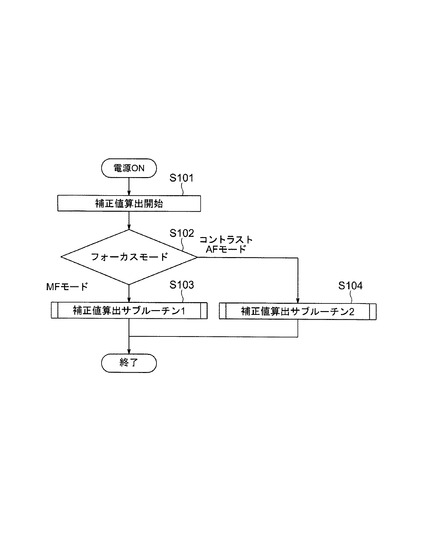
次に、フローチャートを用いて、本実施例におけるフォーカシングの補正動作をさらに詳細に説明する。
図14は、補正値算出の大まかな流れを示すフローチャートである。ステップS101において、補正値算出が開始される。ステップS102において、撮影者はマニュアルフォーカスモードか、コントラストAFモードかが判断される。
【0103】
マニュアルフォーカスモードの場合、ステップS103において、補正値算出サブルーチン1が実行される。
これに対して、コントラストAFモードの場合、ステップS104において、補正値算出サブルーチン2が実行される。
【0104】
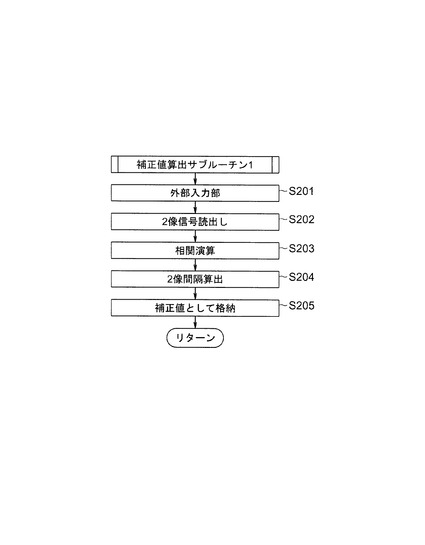
ステップS202において、像信号取得部133は、瞳分割された撮像素子22の画素から2つの被写体像信号(2像の信号)を読み出す。
【0105】
ステップS203において、相関演算部136は、2像信号の相関演算を行う。ステップS204において、相関演算の結果、2像の間隔が算出される。
ステップS205において、補正値格納部137は、2像間隔を補正値として格納する。
【0106】
図16は、補正値算出サブルーチン2の手順を示すフローチャートである。ステップS301において、像信号取得部133は、瞳分割されていない撮像素子22の画素から第1の被写体像信号を読み出す。
【0107】
ステップS302において、コントラストAFが実行され、コントラストAF制御部141(図12)は、コントラストAF評価値のピーク値(最大値)を算出する。ステップS303において、認識部138は、ベスト像面位置(ジャストピント位置)であると認識する。
【0108】
ステップS304において、像信号取得部133は、瞳分割された撮像素子22の画素から2つの被写体像信号(2像の信号)を読み出す。
【0109】
ステップS305において、相関演算部136は、2像信号の相関演算を行う。ステップS306において、相関演算の結果、2像の間隔が算出される。
ステップS307において、補正値格納部137は、2像間隔を補正値として格納する。
【0110】
なお、画素読出しは、全画素読出し、間引き読出しの処理を行うように構成してもよい。画像構成には、欠陥画素の補間処理が含まれている。また、画素加算や画素補間により、焦点検出対象画素の位置の画素信号を求めるようにしてもよい。
【0111】
また、上記図のフローに限定されない。
例えば、電源ON後、初期状態検出、撮像素子駆動、プレビュー画像表示などをおこなってもよい。また、撮影開始をシャッターボタン半押し後、焦点検出サブルーチンに移り、合焦後、確認画像を表示し、シャッターボタン全押し後に、撮影サブルーチンに移るフローでもよい。
【0112】
また、上記実施形態において、補正値を算出する状態は、物点(被写体)が無限遠から至近距離までの間のいずれの撮影状態で算出してもよい。
さらに、無限遠物点の状態において第1の補正値を算出し、至近距離物点の状態において第2の補正値を算出するなど、撮影状態に応じて補正値を算出し、格納することで、測距性能を良くすることが可能となる。
このように、上述した補正値のほか、(至近端)第1の補正値、(無限遠)第2の補正値を算出しておき、撮影状況に応じて使い分けることも可能である。
【0113】
例えば、補正値格納部137は、相関演算部136の演算結果に基づいて第1の被写体像信号に対応する被写体迄の距離が無限遠と推測されるときの補正値を格納する。
また、補正値格納部137は、相関演算部136の演算結果に基づいて第1の被写体像信号に対応する被写体迄の距離が至近端(至近距離)と推測されるときの補正値を格納する。
さらに、補正値格納部137は、相関演算部136の演算結果に基づいて第1の被写体像信号に対応する被写体迄の距離が無限遠でも至近端でもないと推測されるときの補正値を格納する。
このとき、補正値格納部137は、それぞれの被写体距離における補正値を別々に格納する。
これにより、新たに撮影する際の被写体距離が無限遠や至近端のとき、それぞれに応じた補正値を選択することで、少なくとも無限遠や至近端といった状況の違いに応じた補正値を使用することができる。
【0114】
本実施形態は、光路中にメカ機構(ハーフミラー、サブミラー)が存在しない。この、メカ機構による収差の影響がない。したがって、上述した補正は1度行えば良い。他方、光路中にメカ機構(ハーフミラー、サブミラー)が存在するような撮像装置では、収差の影響により、補正を複数回行う必要がある。
このように、本実施形態は、位相差測距方式を採用する撮像装置であって、コンパクトでレリーズタイムラグが少なく、さらに、常に高精度なフォーカシングを行うことができる。
【産業上の利用可能性】
【0115】
以上のように、本発明は、位相差AF方式の撮像装置に適している。
【符号の説明】
【0116】
11 デジタルスチルカメラ
12 交換レンズ
13 カメラボディ
15 絞り駆動部
16 レンズ駆動部
18 ズーミング用レンズ
19 レンズ
20 フォーカシング用レンズ
21 可変絞り
22 撮像素子
24 ボディ制御部
25 液晶表示素子駆動回路
26 液晶表示素子
27 接眼レンズ
28 撮像素子駆動回路
29 メモリーカード
30 レンズ制御部
31a 外部入力部
31 p形ウエル
32α、32β n形領域
33α、33β 表面p+層
35 カラーフィルタ
36 マイクロレンズ
41 画素
42、52 マイクロレンズ
44、54 遮光膜
48、58 開口部
61、62、63、64 オンチップレンズ
61a、62a、63a、64a 光軸
70、80 画素
71、81 屈折率分布レンズ
72 カラーフィルタ
76、86 受光素子
90 移動・駆動部
91 減光素子
120L 左側瞳検出用画素
120R 右側瞳検出用画素
120U 上側瞳検出用画素
120D 下側瞳検出用画素
121 撮影用画素
131 A/D変換部
132 信号処理部
133 像信号取得部
134 記録画像構成部
135 表示画像構成部
136 相関演算部
137 補正値格納部
138 認識部
139 位相差AF制御部
140 制御部
141 コントラストAF制御部
【技術分野】
【0001】
本発明は、撮像装置に関するものである。
【背景技術】
【0002】
一般的に位相差オートフォーカス(以下、適宜「AF」という。)の測距精度は、AFセンサーが取り込める重心Fnoと焦点検出用画素の間隔とで決まっている。
従来例の撮像用画素と焦点検出用画素が2次元的に配列された素子を用いた撮像装置としては、以下の特許文献1に開示された構成が知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第3592147号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の撮像装置には、主に以下の2つの測距方式がある。
(1)コントラスト方式
(2)位相差方式
(1)のコントラスト方式では、フォーカシング状態を変えてウォブリングを行いながらコントラスト値を評価する、いわゆる山登り方式を採用している。このため、合焦時間が長い。
【0005】
また(2)の位相差方式では、原理的に1回の測距でデフォーカス量を検出できる。このため、合焦時間は短い。
位相差方式は、コンパクトでレリーズタイムラグが少ない、という利点を有している。
【0006】
位相差方式を採用している撮像装置において、レンズ交換をするとき、レンズデータが既知であり取得可能な場合、位相差AF時の補正値を算出することが可能である。これに対して、レンズ自体からデータを取得することができない場合、位相差AFの補正値を算出することが出来ない。
そこで、上述したコンパクトでありレリーズタイムラグが少ない、という利点を損なうことなく、さらに、高精度な位相差AFを行えることが望まれている。
【0007】
本発明は、上記に鑑みてなされたものであって、位相差測距方式を採用する撮像装置であって、コンパクトでレリーズタイムラグが少なく、さらに、常に高精度なフォーカシングを行うことができる撮像装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上述した課題を解決し、目的を達成するために、本発明の撮像装置は、
2次元に配列された複数の画素を有し、撮像光学系からの光束により形成された第1の被写体像信号、及び、撮像光学系からの光束のうち、瞳分割されて形成された第2の被写体像並びに第3の被写体像をそれぞれ光電変換し、第2の被写体像信号及び第3の被写体像信号を出力する撮像素子と、
第1の被写体像信号を出力する撮像素子と同一の撮像素子が出力する第2の被写体像信号及び第3の被写体像信号に基づいて、2像の間隔を演算する相関演算部と、
ベスト像面位置であることを認識する認識部と、
認識部の認識結果の情報と、相関演算部の演算結果とに基づいて、2像間隔を補正値として格納する補正値格納部と、
第1の被写体像信号を撮像信号として取得する撮像信号取得部と、
取得した撮像信号に基づいて画像データを生成する画像構成部と、
を有する。
【0009】
また、本発明の好ましい態様によれば、認識部は、撮像素子の同じ画素からの信号に基づいたコントラスト方式による測距結果と位相差方式による測距結果とを比較して、ベスト像面位置であることを認識することが望ましい。
【0010】
また、本発明の好ましい態様によれば、補正値格納部は、認識部がベスト像面位置と認識しているときの相関演算部の結果を補正値として格納することが望ましい。
【0011】
また、本発明の好ましい態様によれば、補正値格納部は、相関演算部の演算結果に基づいて第1の被写体像信号に対応する被写体迄の距離が無限遠と推測されるときの補正値と、距離が至近端と推測されるときの補正値と、距離が無限遠でも至近端でもないと推測されるときの補正値とを、それぞれ別々に格納することが望ましい。
【0012】
本発明によれば、位相差測距方式を採用する撮像装置であって、コンパクトでレリーズタイムラグが少なく、さらに、常に高精度なフォーカシングを行うことができる撮像装置を提供することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施形態に係るデジタルカメラの内部構成を示す図である。
【図2】本実施形態に係るデジタルカメラの射出瞳の構成を示す図である。
【図3】本実施形態における撮像素子の光電変換部の構成を示す図である。
【図4】本実施形態における撮像素子の隣り合う二つの画素の構造を示す断面図である。
【図5】本実施形態における撮像素子の内部構成を示す図である。
【図6】本実施形態における撮像素子の内部構成を示す図である。
【図7】撮像素子の構成(バリエーション1)を示す平面図である。
【図8】撮像素子の構成(バリエーション2)を示す平面図である。
【図9】撮像素子の構成(バリエーション3)を示す平面図である。
【図10】撮像素子の構成(バリエーション4)を示す平面図である。
【図11】本実施形態に係るデジタルカメラの構成を示す機能ブロック図である。
【図12】本実施形態に係るデジタルカメラの構成を示す他の機能ブロック図である。
【図13】エレメントカーブを説明する図である。
【図14】補正値を算出する手順を示すフローチャートである。
【図15】補正値を算出する手順を示す他のフローチャートである。
【図16】補正値を算出する手順を示す別のフローチャートである。
【発明を実施するための形態】
【0014】
以下に、本発明に係る撮像装置の実施形態を図面に基づいて詳細に説明する。なお、以下の実施形態によりこの発明が限定されるものではない。
【0015】
(デジタルカメラ)
まず、本発明の実施形態に係る撮像装置を備えたカメラについて説明する。
図1は、本発明の実施形態に係るデジタルカメラ11の内部構成を示す図である。
デジタルカメラ11は、交換レンズ12と、カメラボディ13と、から構成され、交換レンズ12はマウント部14によりカメラボディ13に装着される。
【0016】
交換レンズ12は、レンズ制御部30、レンズ駆動部16、絞り駆動部15、ズーミング用レンズ18、レンズ19、フォーカシング用レンズ20、及び、絞り21を備えている。レンズ制御部30は、マイクロコンピューターとメモリなどの周辺部品から成り、フォーカシング用レンズ20と絞り21の駆動制御、絞り21、ズーミング用レンズ18およびフォーカシング用レンズ20の状態検出、並びに、ボディ制御部24に対するレンズ情報の送信とカメラ情報の受信などを行う。
また、レンズの状態の他に、レンズデータそのものに関する諸元値は、レンズデータ格納部32に格納されている。
【0017】
絞り駆動部15は、レンズ制御部30を介して、ボディ制御部24からの信号に基づいて、絞り21の開口径を制御する。また、レンズ駆動部16は、レンズ制御部30を介して、ボディ制御部24からの信号に基づいて、ズーミング用レンズ18、フォーカシング用レンズ20を駆動する。
【0018】
カメラボディ13は撮像素子22、ボディ制御部24、液晶表示素子駆動回路25、液晶表示素子26、接眼レンズ27、メモリーカード29などを備えている。撮像素子22には後述する画素が二次元状に配列されており、交換レンズ12の予定結像面に配置されて交換レンズ12により結像される被写体像を撮像する。撮像素子22の所定の焦点検出位置には焦点検出用画素(以下、適宜「AF用画素」という)が配列される。
【0019】
ここで、交換レンズ12は撮像光学系に対応し、撮像素子22は撮像素子に対応する。
【0020】
ボディ制御部24はマイクロコンピューターとメモリなどの周辺部品から構成され、撮像素子駆動回路28を介して、撮像素子22からの画像信号の読み出し、画像信号の補正、交換レンズ12の焦点調節状態の検出、レンズ制御部30からのレンズ情報の受信とカメラ情報(デフォーカス量)の送信、デジタルカメラ全体の動作制御などを行う。ボディ制御部24とレンズ制御部30は、マウント部14の電気接点部23を介して通信を行い、各種情報の授受を行う。
【0021】
液晶表示素子駆動回路25は、液晶ビューファインダーの液晶表示素子26を駆動する。撮影者は接眼レンズ27を介して液晶表示素子26に表示された像を観察する。メモリーカード29はカメラボディ13に脱着可能であり、画像信号を格納記憶する可搬記憶媒体である。
【0022】
交換レンズ12を通過して撮像素子22上に形成された被写体像は、撮像素子22により光電変換され、その出力はボディ制御部24へ送られる。ボディ制御部24は、撮像素子22上のAF用画素の出力データ(第1像信号、第2像信号)に基づいて所定の焦点検出位置におけるデフォーカス量に基づきレンズ駆動量を算出し、このレンズ駆動量をレンズ制御部30を介して、レンズ駆動部16へ送る。また、ボディ制御部24は、撮像素子22の出力に基づいて生成した画像信号をメモリーカード29に格納するとともに、画像信号を液晶表示素子駆動回路25へ送り、液晶表示素子26に画像を表示させる。
【0023】
カメラボディ13には不図示の操作部材(シャッターボタン、焦点検出位置の設定部材など)が設けられており、これらの操作部材からの操作状態信号をボディ制御部24が検出し、検出結果に応じた動作(撮像動作、焦点検出位置の設定動作、画像処理動作)の制御を行う。
【0024】
レンズ制御部30は、レンズ情報をフォーカシング状態、ズーミング状態、絞り設定状態、絞り開放F値などに応じて変更する。具体的には、レンズ制御部30は、レンズ18及びフォーカシング用レンズ20の位置と絞り21の絞り位置をモニターし、モニター情報に応じてレンズ情報を演算すること、あるいは予め用意されたルックアップテーブル、例えばレンズデータ格納部32からモニター情報に応じたレンズ情報を選択する。レンズ制御部30は、受信したレンズ駆動量に基づいてフォーカシング用レンズ20を不図示のモーター等の駆動源により合焦点へと駆動する。
【0025】
(撮像素子の構成)
上述したデジタルカメラ11の構成は、同一の符号を用いる構成は、以下の全ての実施例において共通する。次に、デジタルカメラ11が有する撮像装置の撮像素子22の構成について説明する。
【0026】
図2(a)〜(e)は、本発明の実施形態に係る撮像装置の射出瞳の構成を示す図である。デジタルスチルカメラ11における射出瞳Pは、図2(a)〜(e)に示すように、左右上下のうちの少なくとも2種類の瞳領域に対応する焦点検出用画素を有する。
具体例としては次の(1)〜(5)のとおりである。
【0027】
(1)射出瞳Pを縦に2分割して、左側瞳検出用画素Lと右側瞳検出用画素Rを配置したもの(図2(a))
(2)射出瞳Pを横に2分割して、上側瞳検出用画素Uと下側瞳検出用画素Dを配置したもの(図2(b))
(3)左側瞳検出用画素Lと右側瞳検出用画素Rを左右に配置して、その一部を重ねたもの(図2(c))
(4)上側瞳検出用画素Uと下側瞳検出用画素Dを上下に配置して、その一部を重ねたもの(図2(d))
(5)左側瞳検出用画素Lと下側瞳検出用画素Dを任意の位置に配置して、その一部を重ねたもの(図2(e))
【0028】
なお、測距用瞳の形状は、半円形状、楕円形状としたが、これに限定されず、他の形状、例えば矩形状、多角形状にすることもできる。
また、図2(a)と(b)を組み合わせて上下左右の焦点検出用画素を配置してもよい、図2(c)と(d)を組み合わせて上下左右の焦点検出用画素を配置してもよい、さらに、図2(c)と(e)を組み合わせて左右、斜め線検出の焦点検出用画素を配置してもよいが、これに限定されるものではない。
【0029】
本実施形態の撮像装置では、瞳が異なる領域を有し、その領域の1つを透過した光束を受光する光電変換部の出力から得られる第1像信号と、もう1つの領域を透過した光束を受光する光電変換部の出力から得られる第2像信号と、に基づいて位相差を検出し、撮影レンズの焦点状態を検出する。
以下、図3〜図6を参照して、具体的な射出瞳の分割例について説明する。
【0030】
(光電変換部の分割)
まず、図3を参照して、撮像素子22の光電変換部を分割することによって射出瞳を分割する例を説明する。
図3は、撮像素子22の光電変換部の構成を示す図である。
撮像素子22は、基板内に形成されたP型ウエル31、P型ウエル31と共に光電荷を発生させ蓄積するn型領域32α、32β、n型領域32α、32βに蓄積されている光電荷が転送される不図示のフローティングディフュージョン部(以下、「FD部」と称する。)、n型領域32α、32βに蓄積された光電荷をFD部へ効率よく転送するために光電荷を収集する表面p+層33α、33β、FD部へ光電荷を転送するための転送ゲート(不図示)、ゲート絶縁膜であるSiO2膜34、ベイヤ配列のカラーフィルタ35、及び、被写体からの光を集めるマイクロレンズ36、を備える。
【0031】
マイクロレンズ36は、交換レンズ12(図1)の瞳と表面p+層33α、33βとが、概略共役になるような形状及び位置に形成されている。光電荷は、模式的には、領域37で発生する。
【0032】
図3に示す例では、光電変換部が、n形領域32α及び表面p+層33αと、n形領域32β及び表面p+層33βと、に分割されており、これにより射出瞳が分割される。光線L31、L32は、n形領域32α及び表面p+層33αと、n形領域32β及び表面p+層33βと、にそれぞれ入射する。
【0033】
(開口部を偏心)
次に、図4を参照して、撮像素子22の画素の開口部を光電変換素子の中心に対して偏心させることによって射出瞳を分割する例を説明する。
図4は、撮像素子22の隣り合う二つの画素の構造を示す断面図である。
【0034】
画素41は、最上部から、順に、マイクロレンズ42、マイクロレンズ42を形成するための平面を構成するための平滑層43、色画素の混色防止のための遮光膜44、色フィルタ層をのせる表面を平らにするための平滑層45、及び、光電変換素子46が配置されている。画素51も画素41と同様に、最上部から、順に、マイクロレンズ52、平滑層53、遮光膜54、平滑層55、及び、光電変換素子56が配置されている。
【0035】
さらに、これらの画素41、51においては、遮光膜44、54が、光電変換素子46、56中心部47、57から外側に偏心した開口部48、58をそれぞれ有している。
【0036】
図4に示す例では、撮像素子22の画素の開口部を光電変換素子の中心に対して偏心させている。このため、光線L41、L51は、光電変換素子46、56にそれぞれ入射することから、射出瞳が分割される。
【0037】
つづいて、図5を参照して、レンズを偏心させることによって射出瞳を分割する例を説明する。図5は、撮像素子の内部構成を示す図である。
図5の撮像素子においては、それぞれの画素の上のオンチップレンズ61、62、63、64が独立して構成されている。
図5においては、画素集合Aの画素のオンチップレンズ61、63の光軸61a、63aは、画素の中心から左側にずれている。また、画素集合Bの画素のオンチップレンズ62、64の光軸62a、64aは画素の中心から右側にずれている。
2つの画素集合A、Bからの出力を比較することで、レンズ18のフォーカス量を算出することができる。
【0038】
オンチップレンズ61、62、63、64では、屈折力と光軸61a、62a、63a、64aの位置等の形状という2つのパラメータを独立してコントロールすることができる。画素数が十分多ければ、画素集合Aと画素集合Bは、同様の光の強度分布を得ることができ、これを利用して位相差AFを行うことができる。この時、画面全体でのデフォーカス量を検出できるので、被写体の3次元情報を取得することができる。
【0039】
図5に示す例では、撮像素子22のオンチップレンズを画素の中心に対して偏心させている。このため、光線L61、L62は、オンチップレンズ61、62にそれぞれ入射し、これにより射出瞳が分割される。
【0040】
次に、図6を参照しつつ、DML(デジタルマイクロレンズ)を用いて射出瞳を分割する例を説明する。図6は、撮像素子の内部構造を示す断面図である。
図6に示す撮像素子では、オンチップレンズをDMLで構成している。画素70と画素80はそれぞれ異なる領域からの光束を受光する隣り合った画素である。
【0041】
図6において、撮像素子は、DML71、81、カラーフィルタ72、アルミニウム配線73、信号伝送部74、平坦化層75、受光素子76、86(例えばSiフォトダイオード)、及び、Si基板77を備える。図6に示すように、アルミニウム配線73、信号伝送部74、平滑化層75、受光素子76、86、及び、Si基板77は、半導体集積回路78を構成する。ここで、画素70と画素80の構成は、DML71、81以外は同様である。
【0042】
図6は、入射光束全体のうち、受光素子76、86にそれぞれ入射する光束の様子を示している。DML71、81を用いることにより、光束L71、L81は、画素70の受光素子76と画素80の受光素子86にそれぞれ入射し、射出瞳が分割される。
【0043】
撮像素子(イメージャ)としては、例えば、CCD(charge coupled device)、CMOS(Complementary Metal Oxide Semiconductor)、裏面照射型CMOS、1画素中でR、G、B全色を3層で取り込むことのできるセンサー(Forveon X3)を用いることができる。
【0044】
以下の実施例では、焦点検出用画素は、光電変換部の撮影レンズ側に形成されたオンチップレンズを画素の中心から偏心させることによって、撮影レンズの瞳の異なる位置を透過した光束を受光するように構成されている。瞳分割の手段としては、上述のように、画素中心に対して遮光部材を用いて開口部を偏心させたものや、DMLを用いたもの、1画素中に光電変換部を2つ設けたものでもよい。
【0045】
焦点検出用画素は、撮影レンズの瞳の異なる位置を透過した光束を受光するように構成している。このため、焦点検出用画素からの信号レベルは、焦点検出用画素近傍の撮像用画素から出力される信号レベルと異なってしまうおそれがある。焦点検出用画素の位置における画像用の信号を得る為には、以下の(1)又は(2)の方法をとることが好ましい。
(1)焦点検出用画素の信号を周囲の撮像用画素の信号レベルと同等となるようにゲインを調整し、焦点検出用画素の位置における画像用信号とする。
(2)焦点検出用画素の信号および焦点検出用画素近傍の撮像用画素の信号に基づいて画素補間を行い、焦点検出用画素の位置における画像用信号とする。
【0046】
ゲイン調整の方法については、次のように行う。
まず、焦点検出用画素から出力されたままの信号レベルと、焦点検出用画素近傍の撮像用画素から出力されたままの信号レベルと、を比較する。つづいて、焦点検出用画素から出力される信号レベルを近傍の撮像用画素から出力される信号レベルに近づけるようにゲインを調整する。その後、焦点検出用画素の信号をゲイン調整し得られた信号を画像信号としてデモザイキングを行い、最終画像を得る。
【0047】
画素補間の方法については、以下の(a)〜(c)のいずれかが好ましいが、これらに限定されず、単純平均演算(重み付きも含む)だけでなく、線形補間、2次以上の多項式で補間、メディアン処理などで求めてもよい。
(a)焦点検出用画素の位置における信号を、焦点検出用画素近傍の撮像用画素の信号に基づいて補間し、補間することで得られた信号を焦点検出用画素の位置の画像信号としてデモザイキングを行い、最終画像を得る。
(b)焦点検出用画素の位置における信号を、焦点検出用画素の信号と焦点検出用画素近傍の撮像用画素の信号とに基づいて補間し、補間することで得られた信号を焦点検出用画素の位置の画像信号としてデモザイキングを行い、最終画像を得る。
(c)焦点検出用画素の位置における信号を、焦点検出用画素近傍の撮像用画素の信号に基づいて補間し、補間することで得られた信号と焦点検出用画素の位置の信号とに基づいて補間し、補間することで得られた信号を焦点検出用画素の位置の画像信号としてデモザイキングを行い、最終画像を得る。
【0048】
撮像素子の複数の画素には、複数の色フィルタがそれぞれ配置されている。後述する実施例3、4では、複数の色フィルタの透過特性は、R(赤)、G(緑)、B(青)の3通りとしている。
Bフィルタは、R、G、Bの異なる透過特性のうち、最も短波長側の透過特性をもつ色フィルタであり、Rフィルタは、最も長波長側の透過特性を持つ色フィルタであり、Gフィルタは、それ以外の透過特性を持つものである。
なお、複数の色フィルタは、少なくとも可視域の一部を含み、異なる透過特性を少なくとも3通り有していれば、ほかの組合せでも良い。
【0049】
焦点検出用画素は、複数の色フィルタのうち最も輝度信号に重み付けを行う色フィルタとして、Gフィルタを用いて、入射する光束の入射方向を制限している。
なお、焦点検出用画素は、Gフィルタに限らず、複数の色フィルタのうち最も輝度信号に重み付けを行う色フィルタ、又は、最も透過率が高い色フィルタが配置される画素のうち少なくとも1部が、入射する光束の入射方向を制限するよう構成することができる。
【0050】
(画素配列のバリエーション1)
図7は、第1実施形態のイメージャにおける画素配置を概念的に示す平面図である。
図7に示すイメージャ(撮像装置)は、図3、図4、図5、図6で示した画素において、各画素中心と各光電変換領域の瞳の中心、または面積重心とを上方向、下方向、右側方向、左側方向にずらした画素、の組合せで構成されている。
【0051】
図7は、各画素の光軸方向から望んだときの光電変換領域を示したものである。
図7では、縦10画素(L01〜L10)、横10画素(F01〜F10)で合計100画素の例を示している。しかしながら、画素数はこれに限るものでなく、例えば合計画素が1000万画素を超えるものでも構わない。
【0052】
図7に示す例では、画素中心に対し光電変換領域の面積中心のずれている方向が右側と左側と上側と下側の4種類がある。以下の説明では、それぞれを右画素120R、左画素120L、上画素120U、下画素120Dと称することとする。
【0053】
図7において、L01の行では、左から(F01から)順に、左画素120L、撮像用画素121、左画素120L、撮像用画素121、が繰り返し配置されている。
L02の行では、左から順に、撮像用画素121、上画素120U、撮像用画素121、下画素120D、が繰り返し配置されている。
L03の行では、左から順に、右画素120R、撮像用画素121、右画素120R、撮像用画素121、が繰り返し配置されている。
L04の行では、左から順に、撮像用画素121、上画素120U、撮像用画素121、下画素120D、が繰り返し配置されている。
L05以降の行は、L01、L02、L03、L04のパターンを繰り返す配置になっている。
【0054】
図7の配置をF01〜10の列から見ると次のようになる。
F01の列では、上から(L01から)順に、左画素120L、撮影用画素121、右画素120R、撮影用画素121、が繰り返し配置されている。
F02の列では、上から順に、撮影用画素121、上画素120U、撮影用画素121、上画素120U、が繰り返し配置されている。
F03以降の列は、F01、F02のパターンを繰り返す配置になっている。
【0055】
以下の説明においては、特定の画素を示すときに、行番号L01〜L10と列番号F01〜F10を並べて表す。例えば、L01の行のうち、F01の列に対応する画素を「L01F01」で表す。
【0056】
図7に示す例では、例えば、L01F01(左画素120L)と、L02F02(上画素120U)とL03F01(右画素120R)とL02F04(下画素120D)とのいずれかの画素とは、画素ピッチから算出される画素間距離より、瞳の中心間距離または重心間距離が狭い構成となる。
【0057】
第1実施形態の撮像装置では、左画素120Lから構成されるセル群と、右画素120Rから構成される別のセル群と、のそれぞれの出力信号(測距のための信号)から、位相差情報を算出して光学系のフォーカスを調整させることができる。
【0058】
例えば、L01の行の左画素120LであるL01F01、L01F03、L01F05、L01F07、L01F09から得られる出力波形と、L03の行の右画素120Rである、L03F01、L03F03、L03F05、L03F07、L03F09から得られる出力波形と、を比較することで、所謂位相差検出式によりデフォーカス情報や合焦点位置情報が取得できる。
【0059】
(画素配列のバリエーション2)
次に、撮像装置が備える撮像素子の他の構成例について説明する。
【0060】
図8の配置において、L05F01画素とL05F05画素とは、左側瞳検出用画素である。また、L05F03画素は、右側瞳検出用画素である。
【0061】
これにより、精度の高い焦点検出を行うことができる。
【0062】
(画素配列のバリエーション3)
次に、撮像装置が備える撮像素子の他の構成例について説明する。
【0063】
図9のカラーフィルタの配置は、L01F01画素を緑色のフィルタG、L01F02画素を赤色のフィルタRとして、横方向に、これらの組合せパターンを繰り返している。
【0064】
また、L02F01画素を青色のフィルタB、L02F02画素を緑色のフィルタGとして、横方向に、これらの組合せパターンを繰り返している。
そして、L01列のパターンと、L02列のパターンとを、縦方向に、繰り返している。
【0065】
ここで、緑色のフィルタGが配置されている、L05F01画素とL05F09画素とは、左側瞳検出用画素である。また、L05F05画素は、右側瞳検出用画素である。
【0066】
これにより、被写体の色に関わらず精度の高い焦点検出を行うことができる。尚、カラーフィルタと光電変換領域の画素中心からのズレ方向の組み合わせはこれに限る必要ない。
【0067】
(画素配列のバリエーション4)
次に、撮像装置が備える撮像素子のさらに他の構成例について説明する。
【0068】
図10のカラーフィルタの配置は、L01F01画素を緑色のフィルタG、L01F02画素を赤色のフィルタRとして、横方向に、これらの組合せパターンを繰り返している。
【0069】
また、L02F01画素を青色のフィルタB、L02F02画素を緑色のフィルタGとして、横方向に、これらの組合せパターンを繰り返している。
そして、L01列のパターンと、L02列のパターンとを、縦方向に、繰り返している。
【0070】
ここで、緑色のフィルタGが配置されている、L01F01画素と、L01F09画素と、L09F01画素と、L09F09画素とは、左側瞳検出用画素である。
また、L05F01画素と、L05F09画素とは、右側瞳検出用画素である。
また、L01F05画素と、L09F05画素とは、上側瞳検出用画素である。
さらに、L05F05画素は、下側瞳検出用画素である。
【0071】
これにより、被写体の色に関わらず精度の高い焦点検出を行うことができる。尚、カラーフィルタと光電変換領域の画素中心からのズレ方向の組み合わせはこれに限る必要はない。
【0072】
(機能ブロックの説明)
本実施形態では、認識部138(図11、図12)は、後述するように、ベスト像面位置を認識する。この認識に関して、以下の2通りの手順(a)、(b)がある。
(a)撮影者がマニュアルフォーカス(以下、適宜「MF」)モードを用いてベスト像面位置、つまり最もピントが合っている状態を認識する。
(b)コントラストAF方式を用いてベスト像面位置を認識する。
【0073】
図11は、交換レンズ12がAFに対応していないAF不可レンズの場合に、MFモードを用いて、ベスト像面を認識する撮像装置11のボディ制御部24の機能ブロックを示す図である。なお、図1で示す構成と同一の構成には、同じ参照番号を付し、重複する説明は省略する。
【0074】
撮像素子22からは、撮影用画素からの信号、焦点検出用画素からの信号、第1像信号、及び第2像信号のいずれの信号であるかを識別するための信号がラインaを経由してA/D変換部131へ入力する。
【0075】
撮像素子22からは、撮影用画素からの信号、焦点検出用画素からの信号、第1像信号、及び第2像信号のいずれの信号であるかを識別するための信号がA/D変換部131へ入力する。
【0076】
像信号取得部(撮像信号取得部)133は、A/D信号処理部131と信号処理部132を経由した信号を取得する。撮影用画素からの信号は、表示画像構成部135により、液晶表示素子駆動回路25へ出力される。液晶表示素子(表示部)26は、撮影用の画像を表示する。撮影者は、接眼レンズ27を通して撮影用の画像を観察できる。
【0077】
記録画像構成部134は、撮影用画素からの信号に基づいて記録画像データを構成する。記録画像データは、メモリーカード29に格納される。
記録画像構成部134と表示画像構成部135とは、取得した撮像信号に基づいて画像データを生成する画像構成部に対応する。
【0078】
また、焦点検出用画素からの信号は、像信号取得部133から相関演算部136へ出力される。
【0079】
撮像素子22は、2次元に配列された複数の画素を有し、撮像光学系であるレンズ18、19、20からの光束により形成された第1の被写体像信号、並びに、撮像光学系からの光束のうち、瞳分割されて形成された第2の被写体像及び第3の被写体像をそれぞれ光電変換し、第2の被写体像信号及び第3の被写体像信号を出力する。詳細は後述する。
【0080】
相関演算部136は、第1像信号、及び第2像信号に基づいて相関演算を行う。つまり、相関演算部136は、第1の被写体像信号を出力する撮像素子22と同一の撮像素子22が出力する第2の被写体像信号及び第3の被写体像信号に基づいて、2像の間隔を演算する。
【0081】
また、補正値格納部137は、認識部138の認識結果の情報と、相関演算部137の演算結果とに基づいて、2像間隔を補正値として格納する
【0082】
補正値格納部137は、認識部138の認識結果の情報と、相関演算部137の演算結果とに基づいて、2像間隔を補正値として格納する。
【0083】
ここでは、補正値格納部137は、認識部138がベスト像面位置と認識しているときの相関演算部137の結果を補正値として格納する。
これにより、位相差AFとの結果を補正して、マニュアルフォーカスモードによるピント合わせの結果に一致させることができる。
【0084】
図12は、交換レンズ12がAFに対応しているAFレンズの場合に、コントラストAFモードを用いて、ベスト像面を認識する撮像装置11のボディ制御部24の機能ブロックを示す図である。なお、図1で示す構成と同一の構成には、同じ参照番号を付し、重複する説明は省略する。
【0085】
撮像素子22からは、撮影用画素からの信号、焦点検出用画素からの信号、第1像信号、及び第2像信号のいずれの信号であるかを識別するための信号がラインaを経由してA/D変換部131へ入力する。
【0086】
撮像素子22からは、撮影用画素からの信号、焦点検出用画素からの信号、第1像信号、及び第2像信号のいずれの信号であるかを識別するための信号がA/D変換部131へ入力する。
【0087】
像信号取得部(撮像信号取得部)133は、A/D信号処理部131と信号処理部132を経由した信号を取得する。撮影用画素からの信号は、表示画像構成部135により、液晶表示素子駆動回路25へ出力される。液晶表示素子(表示部)26は、撮影用の画像を表示する。撮影者は、接眼レンズ27を通して撮影用の画像を観察できる。
【0088】
記録画像構成部134は、撮影用画素からの信号に基づいて記録画像データを構成する。記録画像データは、メモリーカード29に格納される。
記録画像構成部134と表示画像構成部135とは、取得した撮像信号に基づいて画像データを生成する画像構成部に対応する。
【0089】
また、焦点検出用画素からの信号は、像信号取得部133から相関演算部136へ出力される。
【0090】
撮像素子22は、2次元に配列された複数の画素を有し、撮像光学系であるレンズ18、19、20からの光束により形成された第1の被写体像信号、並びに、撮像光学系からの光束のうち、瞳分割されて形成された第2の被写体像及び第3の被写体像をそれぞれ光電変換し、第2の被写体像信号及び第3の被写体像信号を出力する。
【0091】
相関演算部136は、第1像信号、及び第2像信号に基づいて相関演算を行う。つまり、相関演算部136は、第1の被写体像信号を出力する撮像素子22と同一の撮像素子22が出力する第2の被写体像信号及び第3の被写体像信号に基づいて、2像の間隔を演算する。
【0092】
また、補正値格納部137は、認識部138の認識結果の情報と、相関演算部137の演算結果とに基づいて、2像間隔を補正値として格納する。
【0093】
ここで、コントラストAFモードにより、ベスト像面位置となるようにフォーカシングする。
コントラストAF制御部141は、制御部140を介して、フォーカスレンズ駆動部16、絞り制御部15を制御する。コントラスト方式では、フォーカシング状態を変えながらコントラスト値を評価する、いわゆる山登り方式を採用している。これにより、撮像した画像のコントラストが最も高い状態を検出する。
この状態を、認識部138は、ベスト像面位置であることを認識する。
補正値格納部137は、認識部138の認識結果の情報と、相関演算部137の演算結果とに基づいて、2像間隔を補正値として格納する。
【0094】
認識部138は、撮像素子22の同じ前記画素からの信号に基づいたコントラストAF方式による測距結果と位相差AF方式による測距結果とを比較して、ベスト像面位置であることを認識する。
【0095】
補正値格納部137は、ベスト像面位置から所定距離ずれた位置における2像間隔を推定し、所定距離であるずれ量と、推定された2像間隔と、所定距離ずれた位置における相関演算結果と、に基づいて補正値を算出し、補正値として格納する。
これにより、位相差AFとの結果を補正して、コントラストAFモードによるピント合わせの結果に一致させることができる。
【0096】
次に、補正値による補正の内容を説明する。図13(a)、(b)、(c)は、デフォーカス量(横軸)と、2像間隔(縦軸)との比例関係(以下、適宜、「デフォーカスエレメントカーブ」という。)を示す図である。
【0097】
図13(a)は、従来の位相差AFについてデフォーカスエレメントが既知の場合を示している。
相関演算により2像間隔(EL)が算出される。例えば、2像間隔は所定の距離aである。また、2像間隔に対応するデフォーカス量bが得られる。
このデフォーカス量に基づき、レンズ駆動量を算出し、レンズを駆動する。
【0098】
ここで、相関演算から得られるデフォーカスエレメントカーブの切片は0(ゼロ)を通らない。そのため、補正値を用いて、切片が0(ゼロ)を通るように補正している。
一般的にこの補正値は、撮影時に演算して求めるものではなく、データとして格納されている。
【0099】
図13(b)は、従来構成において、デフォーカスエレメントが未知の場合を示している。
デフォーカスエレメントカーブが未知のため、傾き、切片が未知である。1ポイントの相関演算結果では、傾きと切片は、算出できない。つまり、補正値が算出できない。
なお、1点鎖線、2点鎖線で示す直線を、未知のデフォーカスエレメントカーブの参考として示している。
【0100】
図13(c)は、本実施形態において、デフォーカスエレメントが未知の場合を示している。
デフォーカスエレメントカーブが未知のため、傾きと切片とは、未知である。上述したように、1ポイントの相関演算結果では、傾きと切片は算出できない。つまり、補正値が算出できない。
本実施形態では、認識部138より、ベスト像面位置を認識することで、デフォーカス量0(ゼロ)が定義できる。ベスト像面の認識は、上述した2つの機能ブロック図のように、MFモードや、コントラストAFモードを用いて行う。
このデフォーカス量0(ゼロ)の位置における相関演算結果から、切片が算出可能となる。つまり、補正値βを算出可能となる。
【0101】
切片が算出できれば、デフォーカスエレメントカーブの傾きは未知であっても、ベスト像面位置での2像間隔ELは、必ず0(ゼロ)となる。
なお、1点鎖線、2点鎖線で示す直線を、未知のデフォーカスエレメントカーブの参考として示している。
【0102】
次に、フローチャートを用いて、本実施例におけるフォーカシングの補正動作をさらに詳細に説明する。
図14は、補正値算出の大まかな流れを示すフローチャートである。ステップS101において、補正値算出が開始される。ステップS102において、撮影者はマニュアルフォーカスモードか、コントラストAFモードかが判断される。
【0103】
マニュアルフォーカスモードの場合、ステップS103において、補正値算出サブルーチン1が実行される。
これに対して、コントラストAFモードの場合、ステップS104において、補正値算出サブルーチン2が実行される。
【0104】
ステップS202において、像信号取得部133は、瞳分割された撮像素子22の画素から2つの被写体像信号(2像の信号)を読み出す。
【0105】
ステップS203において、相関演算部136は、2像信号の相関演算を行う。ステップS204において、相関演算の結果、2像の間隔が算出される。
ステップS205において、補正値格納部137は、2像間隔を補正値として格納する。
【0106】
図16は、補正値算出サブルーチン2の手順を示すフローチャートである。ステップS301において、像信号取得部133は、瞳分割されていない撮像素子22の画素から第1の被写体像信号を読み出す。
【0107】
ステップS302において、コントラストAFが実行され、コントラストAF制御部141(図12)は、コントラストAF評価値のピーク値(最大値)を算出する。ステップS303において、認識部138は、ベスト像面位置(ジャストピント位置)であると認識する。
【0108】
ステップS304において、像信号取得部133は、瞳分割された撮像素子22の画素から2つの被写体像信号(2像の信号)を読み出す。
【0109】
ステップS305において、相関演算部136は、2像信号の相関演算を行う。ステップS306において、相関演算の結果、2像の間隔が算出される。
ステップS307において、補正値格納部137は、2像間隔を補正値として格納する。
【0110】
なお、画素読出しは、全画素読出し、間引き読出しの処理を行うように構成してもよい。画像構成には、欠陥画素の補間処理が含まれている。また、画素加算や画素補間により、焦点検出対象画素の位置の画素信号を求めるようにしてもよい。
【0111】
また、上記図のフローに限定されない。
例えば、電源ON後、初期状態検出、撮像素子駆動、プレビュー画像表示などをおこなってもよい。また、撮影開始をシャッターボタン半押し後、焦点検出サブルーチンに移り、合焦後、確認画像を表示し、シャッターボタン全押し後に、撮影サブルーチンに移るフローでもよい。
【0112】
また、上記実施形態において、補正値を算出する状態は、物点(被写体)が無限遠から至近距離までの間のいずれの撮影状態で算出してもよい。
さらに、無限遠物点の状態において第1の補正値を算出し、至近距離物点の状態において第2の補正値を算出するなど、撮影状態に応じて補正値を算出し、格納することで、測距性能を良くすることが可能となる。
このように、上述した補正値のほか、(至近端)第1の補正値、(無限遠)第2の補正値を算出しておき、撮影状況に応じて使い分けることも可能である。
【0113】
例えば、補正値格納部137は、相関演算部136の演算結果に基づいて第1の被写体像信号に対応する被写体迄の距離が無限遠と推測されるときの補正値を格納する。
また、補正値格納部137は、相関演算部136の演算結果に基づいて第1の被写体像信号に対応する被写体迄の距離が至近端(至近距離)と推測されるときの補正値を格納する。
さらに、補正値格納部137は、相関演算部136の演算結果に基づいて第1の被写体像信号に対応する被写体迄の距離が無限遠でも至近端でもないと推測されるときの補正値を格納する。
このとき、補正値格納部137は、それぞれの被写体距離における補正値を別々に格納する。
これにより、新たに撮影する際の被写体距離が無限遠や至近端のとき、それぞれに応じた補正値を選択することで、少なくとも無限遠や至近端といった状況の違いに応じた補正値を使用することができる。
【0114】
本実施形態は、光路中にメカ機構(ハーフミラー、サブミラー)が存在しない。この、メカ機構による収差の影響がない。したがって、上述した補正は1度行えば良い。他方、光路中にメカ機構(ハーフミラー、サブミラー)が存在するような撮像装置では、収差の影響により、補正を複数回行う必要がある。
このように、本実施形態は、位相差測距方式を採用する撮像装置であって、コンパクトでレリーズタイムラグが少なく、さらに、常に高精度なフォーカシングを行うことができる。
【産業上の利用可能性】
【0115】
以上のように、本発明は、位相差AF方式の撮像装置に適している。
【符号の説明】
【0116】
11 デジタルスチルカメラ
12 交換レンズ
13 カメラボディ
15 絞り駆動部
16 レンズ駆動部
18 ズーミング用レンズ
19 レンズ
20 フォーカシング用レンズ
21 可変絞り
22 撮像素子
24 ボディ制御部
25 液晶表示素子駆動回路
26 液晶表示素子
27 接眼レンズ
28 撮像素子駆動回路
29 メモリーカード
30 レンズ制御部
31a 外部入力部
31 p形ウエル
32α、32β n形領域
33α、33β 表面p+層
35 カラーフィルタ
36 マイクロレンズ
41 画素
42、52 マイクロレンズ
44、54 遮光膜
48、58 開口部
61、62、63、64 オンチップレンズ
61a、62a、63a、64a 光軸
70、80 画素
71、81 屈折率分布レンズ
72 カラーフィルタ
76、86 受光素子
90 移動・駆動部
91 減光素子
120L 左側瞳検出用画素
120R 右側瞳検出用画素
120U 上側瞳検出用画素
120D 下側瞳検出用画素
121 撮影用画素
131 A/D変換部
132 信号処理部
133 像信号取得部
134 記録画像構成部
135 表示画像構成部
136 相関演算部
137 補正値格納部
138 認識部
139 位相差AF制御部
140 制御部
141 コントラストAF制御部
【特許請求の範囲】
【請求項1】
2次元に配列された複数の画素を有し、撮像光学系からの光束により形成された第1の被写体像信号、及び、前記撮像光学系からの光束のうち、瞳分割されて形成された第2の被写体像並びに第3の被写体像をそれぞれ光電変換し、第2の被写体像信号及び第3の被写体像信号を出力する撮像素子と、
前記第1の被写体像信号を出力する前記撮像素子と同一の前記撮像素子が出力する前記第2の被写体像信号及び前記第3の被写体像信号に基づいて、2像の間隔を演算する相関演算部と、
ベスト像面位置であることを認識する認識部と、
前記認識部の認識結果の情報と、前記相関演算部の演算結果とに基づいて、2像間隔を補正値として格納する補正値格納部と、
前記第1の被写体像信号を撮像信号として取得する撮像信号取得部と、
取得した前記撮像信号に基づいて画像データを生成する画像構成部と、
を有することを特徴とするの撮像装置。
【請求項2】
前記認識部は、前記撮像素子の同じ前記画素からの信号に基づいたコントラスト方式による測距結果と位相差方式による測距結果とを比較して、ベスト像面位置であることを認識することを特徴とする請求項1に記載の撮像装置。
【請求項3】
前記補正値格納部は、前記認識部がベスト像面位置と認識しているときの前記相関演算部の結果を補正値として格納することを特徴とする請求項1に記載の撮像装置。
【請求項4】
前記補正値格納部は、前記相関演算部の演算結果に基づいて前記第1の被写体像信号に対応する被写体迄の距離が無限遠と推測されるときの前記補正値と、前記距離が至近端と推測されるときの前記補正値と、前記距離が無限遠でも至近端でもないと推測されるときの前記補正値とを、それぞれ別々に格納することを特徴とする請求項1または2に記載の撮像装置。
【請求項1】
2次元に配列された複数の画素を有し、撮像光学系からの光束により形成された第1の被写体像信号、及び、前記撮像光学系からの光束のうち、瞳分割されて形成された第2の被写体像並びに第3の被写体像をそれぞれ光電変換し、第2の被写体像信号及び第3の被写体像信号を出力する撮像素子と、
前記第1の被写体像信号を出力する前記撮像素子と同一の前記撮像素子が出力する前記第2の被写体像信号及び前記第3の被写体像信号に基づいて、2像の間隔を演算する相関演算部と、
ベスト像面位置であることを認識する認識部と、
前記認識部の認識結果の情報と、前記相関演算部の演算結果とに基づいて、2像間隔を補正値として格納する補正値格納部と、
前記第1の被写体像信号を撮像信号として取得する撮像信号取得部と、
取得した前記撮像信号に基づいて画像データを生成する画像構成部と、
を有することを特徴とするの撮像装置。
【請求項2】
前記認識部は、前記撮像素子の同じ前記画素からの信号に基づいたコントラスト方式による測距結果と位相差方式による測距結果とを比較して、ベスト像面位置であることを認識することを特徴とする請求項1に記載の撮像装置。
【請求項3】
前記補正値格納部は、前記認識部がベスト像面位置と認識しているときの前記相関演算部の結果を補正値として格納することを特徴とする請求項1に記載の撮像装置。
【請求項4】
前記補正値格納部は、前記相関演算部の演算結果に基づいて前記第1の被写体像信号に対応する被写体迄の距離が無限遠と推測されるときの前記補正値と、前記距離が至近端と推測されるときの前記補正値と、前記距離が無限遠でも至近端でもないと推測されるときの前記補正値とを、それぞれ別々に格納することを特徴とする請求項1または2に記載の撮像装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2012−128101(P2012−128101A)
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願番号】特願2010−278380(P2010−278380)
【出願日】平成22年12月14日(2010.12.14)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願日】平成22年12月14日(2010.12.14)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
[ Back to top ]