
撮像装置
【課題】 従来の撮像装置では、流星が光って出現してから消えるまでの出現した流星全体を、1枚の画像内に収めて撮像することは困難であった。
【解決手段】 流星情報取得手段により取得された流星12の軌道情報に基づいて、カメラ1が存在する位置から見える流星12の方向および流星12が光って出現する天空範囲が、PC4により演算して求められる。カメラ1の画角は、PC4によって求められた天空範囲に合う画角に、画角設定手段によりS5において設定される。カメラ1のCPUは、駆動部2によって駆動された撮像方向および画角設定手段によって設定された画角で、撮像手段により流星12を撮像させて、S8において流星画像を取得する。このため、流星12が光って出現する天空範囲に合う画角にカメラ1の画角が設定されることで、光って出現する流星12全体の画像を1枚の画像内に収めて簡単に撮像できる。
【解決手段】 流星情報取得手段により取得された流星12の軌道情報に基づいて、カメラ1が存在する位置から見える流星12の方向および流星12が光って出現する天空範囲が、PC4により演算して求められる。カメラ1の画角は、PC4によって求められた天空範囲に合う画角に、画角設定手段によりS5において設定される。カメラ1のCPUは、駆動部2によって駆動された撮像方向および画角設定手段によって設定された画角で、撮像手段により流星12を撮像させて、S8において流星画像を取得する。このため、流星12が光って出現する天空範囲に合う画角にカメラ1の画角が設定されることで、光って出現する流星12全体の画像を1枚の画像内に収めて簡単に撮像できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、撮像手段により流星を撮像させて流星画像を取得する撮像装置に関する。
【背景技術】
【0002】
従来、この種の撮像装置としては、例えば、特許文献1に開示されたネットワーク利用の天体望遠システムがある。この天体望遠システムでは、端末PC(パーソナルコンピュータ)が、天文情報センターにネットワーク接続されており、また、カメラが取り付けられた天体望遠鏡に接続されている。ユーザが、端末PCから天文情報センターのホームページ上で天体望遠鏡の設置位置を入力すると、天文情報センターは、自己のデータベースを検索し、設置位置で観測できる星座や惑星等のニュースをホームページ上に表示する。表示された中から観測したい所望の星座等をユーザが選択すると、天文情報センターは、所望の星座等の赤経緯度をユーザの端末PCに通知する。天体望遠鏡は、端末PCがこの赤経緯度を天体望遠鏡の赤道儀に設定することで、ユーザが所望する星座等の観測を開始する。ユーザは、補助望遠鏡で星座等を確認しつつ、天体望遠鏡に取り付けられたカメラの撮影条件を設定して、カメラで所望の星座等の画像を撮影できる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−343592号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来の撮像装置では、ユーザが観測したい星座や惑星等の方向に天体望遠鏡を向けて、カメラで所望の星座等の画像を撮像できるが、流星が光って出現してから消えるまでの出現した流星全体を、1枚の画像内に収めて撮像することは困難であった。
【課題を解決するための手段】
【0005】
本発明はこのような課題を解決するためになされたもので、
被写体を撮像する撮像手段と、
撮像手段が存在する位置情報を取得する位置情報取得手段と、
データベースから流星の軌道情報を取得する流星情報取得手段と、
流星情報取得手段により取得された流星の軌道情報に基づいて、撮像手段が存在する位置から見える流星の方向および流星が光って出現する天空範囲を演算して求める演算手段と、
演算手段によって求められた方向に撮像手段の撮像方向を駆動する撮像方向駆動手段と、
演算手段によって求められた天空範囲に合う画角に撮像手段の画角を設定する画角設定手段と、
撮像方向駆動手段によって駆動された撮像方向および画角設定手段によって設定された画角で撮像手段により流星を撮像させて流星画像を取得する画像取得手段と
を備えて、撮像装置を構成した。
【発明の効果】
【0006】
本発明による撮像装置によれば、データベースから取得された流星の軌道情報に基づいて、撮像手段が存在する位置から見える流星の方向に撮像手段の撮像方向が駆動され、流星が光って出現する天空範囲に合う画角に撮像手段の画角が設定されることで、光って出現する流星全体の画像を1枚の画像内に収めて簡単に撮像できるようになる。
【図面の簡単な説明】
【0007】
【図1】本発明の一実施形態による撮像装置の概略構成を示す図である。
【図2】本実施形態の撮像装置によって行われる流星撮影処理の概略を示すフローチャートである。
【図3】図1に示すカメラにより撮像された、流星の出現前から流星が出現して消えるまでの画像データの概略を示す図である。
【発明を実施するための形態】
【0008】
次に、本発明による撮像装置を実施するための一形態について説明する。
【0009】
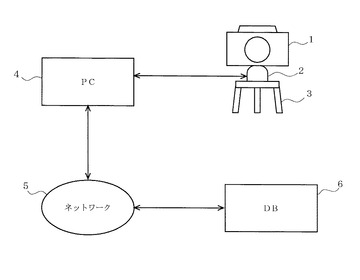
図1は、この一実施形態による撮像装置の概略構成を示す図である。
【0010】
撮像装置は、カメラ1、駆動部2、三脚3、およびPC4から構成されている。カメラ1の底部には駆動部2が設けられ、駆動部2は三脚3の上に設置されている。駆動部2は、モータを内蔵して構成され、PC4からの制御信号に応じてカメラ1の撮像方向を制御する。また、駆動部2にはI/F回路が内蔵されており、PC4からのカメラ1に対する制御信号、およびカメラ1の状態を示す種々の状態信号が、このI/F回路を介して、カメラ1およびPC4間で授受される。また、PC4は、ネットワーク5を介して、種々の天文情報を備えるDB(データベース)6に接続されている。
【0011】
カメラ1には、被写体を撮像する撮像手段を構成するCCD(Charge Coupled Device)センサなどが内蔵され、また、この撮像手段を有するカメラ1が存在する位置情報を取得するGPS(Global Positioning System)が位置情報取得手段として備えられている。カメラ1のGPSにより取得されたカメラ1の位置情報は、駆動部2を介してPC4へ出力される。PC4は、流星情報取得手段を構成し、使用者の操作に応じてこの位置情報をDB6へ送信し、DB6から、カメラ1の存在する位置から見える流星の軌道情報を取得する。ここで、流星の軌道情報とは、流星が大気圏へ突入する際の速度や入射角度、突入位置(方位、高度)、流星の大きさ、流星が大気圏へ突入して燃え始める時刻等の情報である。
【0012】
PC4は、取得したこの流星の情報を基に、流星が発光して燃え始めてから燃え尽きるまでの時間を算出し、また、流星が発光して燃え始めてから燃え尽きるまでの天空における距離や軌跡等を算出する。その後、演算手段を構成するPC4は、算出したこれらの情報に基づいて、カメラ1が存在する位置から見える流星の方向および流星が光って出現する天空範囲を演算して求め、流星が発光して燃え始めてから燃え尽きるまでに流星が通過する天空範囲に対応したカメラ1の画角を算出する。なお、流星が燃え尽きずに地上まで落下する場合や、流星が燃え尽きる位置を計算できない場合には、流星が発光を開始する位置から流星が落下する地上の位置までの天空範囲を含む画角が算出される。このように算出された画角は、PC4の不図示のモニタに表示される。PC4のモニタは、演算手段により求められた天空範囲に合うカメラ1の画角を報知する報知手段を構成する。
【0013】
カメラ1には、使用者の回動操作に応じてズーム角を変更して、撮像手段の画角を調整する不図示のズームレンズが画角手動調節手段として取り付けられている。使用者は、ズームレンズを操作してカメラ1の画角をモニタに表示された画角に設定する。ズームレンズおよびPC4のモニタは、演算手段によって求められた天空範囲に合う画角に撮像手段の画角を設定する画角設定手段を構成する。
【0014】
また、PC4は、流星の軌道情報から流星が出現する位置情報を演算すると、駆動部2に制御信号を送信し、駆動部2を駆動して、カメラ1の撮像方向を演算して求めた方向に向ける。駆動部2は、演算手段によって求められた方向に撮像手段の撮像方向を駆動する撮像方向駆動手段を構成する。また、演算手段を構成するPC4は、流星の軌道情報に基づいて、さらに、流星が発光する際の輝度を算出し、この輝度の流星を撮像するのに最適なカメラ1の露出値等の撮影条件を算出する。算出された撮影条件はPC4からカメラ1に送信され、カメラ1は撮影条件を受信した露出値等に合わせる。
【0015】
使用者がカメラ1の不図示のメニュー画面などで、撮影モードを流星撮影モードに設定すると、カメラ1は、撮像手段に撮像される画像データの画素情報を解析する流星監視状態となる。この流星監視状態では、カメラ1に内蔵されたCPU(Central Processing Unit)は、撮像手段に逐次得られる各画像データの画素情報の差分を取る。流星が光って出現するとこの差分に変化が生じる。この場合、カメラ1のCPUは、得られる画像データを記憶部に蓄積し始め、流星の画像データの取得を開始する。カメラ1のCPUは、駆動部2によって駆動された撮像方向および画角設定手段によって設定された画角で撮像手段により流星を撮像させて、流星画像を取得する画像取得手段を構成する。
【0016】
また、カメラ1のCPUは、撮像手段により得られる画像データの画素情報に変化があった場合に、画像取得手段に流星画像の画像データの取得を開始させる撮像開始手段を構成する。本実施形態では、この撮像開始手段は、流星情報取得手段により取得された、カメラ1が存在する位置から見える流星の出現時刻の所定時間前から、撮像手段により得られる画像データの画素情報に起きる変化を検出する。また、カメラ1のCPUは、撮像開始手段により画像データの取得が開始された後、撮像手段により得られる各画像データの画素情報の差分に変化が無くなった場合に、流星が燃え尽きて消滅したと判断する。この場合、撮像終了手段を構成するカメラ1のCPUは、画像取得手段による流星画像の画像データの取得を終了させる。
【0017】
図2は、本実施形態の撮像装置によって行われる流星撮影処理の概略を示すフローチャートである。
【0018】
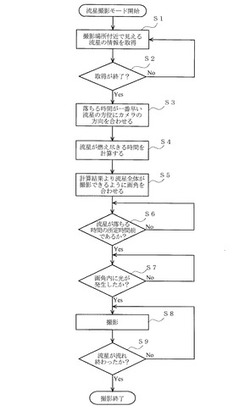
使用者がカメラ1のメニュー画面などを操作して流星撮影モードを設定すると、撮像装置は、流星撮影モードでの撮影を開始する。この流星撮影モードでは、カメラ1のGPSにより取得されたカメラ1の位置情報がPC4へ出力され、PC4は、ステップ(以下、Sと記す)1において、カメラ1の撮影場所付近で見える流星の軌道情報をネットワーク5を介してDB6から取得する。次に、PC4は、S2において、DB6からの流星の軌道情報の取得が終了したか否かを判別する。流星の軌道情報の取得が終了しておらず、S2の判別が“NO”の場合、PC4は、S1の処理に戻り、流星の軌道情報を取得し続ける。
【0019】
一方、流星の軌道情報の取得が終了し、S2の判別が“YES”の場合、PC4は、S3において、落ちる時間が一番早い流星の方位にカメラ1を向ける制御信号を駆動部2へ送信し、駆動部2を駆動して、カメラ1の撮像方向を流星の方位に向ける。次に、PC4は、S4において、DB6から取得した流星の軌道情報から、上述したように、流星が燃え尽きる時間等を計算する。そして、S5において、この計算結果より、流星が光って出現する天空範囲に合うカメラ1の画角を計算し、計算したカメラ1の画角をモニタに表示する。この表示を見た使用者は、ズームレンズを回動操作して、カメラ1の画角を表示された画角に合わせる。また、PC4は、カメラ1から見える流星が最適に撮像されるカメラ1の撮影条件を算出し、算出した条件で撮像が行われるように、カメラ1に撮影条件の設定を行なう。
【0020】
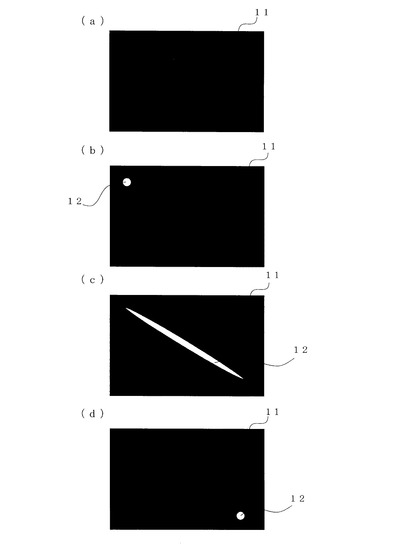
次に、カメラ1のCPUは、S6において、現在の時間が流星が落ちる時間の所定時間前であるか否かを判別する。流星が落ちる時間の所定時間前ではなく、S6の判別が“NO”の場合、S6の処理が繰り返し行われる。一方、流星が落ちる時間の所定時間前になり、S6の判別が“YES”になると、カメラ1のCPUは、S7において、カメラ1の撮像手段により撮像される画像データの画素情報の解析を開始する。この解析では、各画像データの画素情報の差分を取って、撮像される画像データの画角内に光が発生したか否かを判別する。流星が出現しないために撮像された画像データの画角内に光が発生せず、画素情報の差分に変化が無くて、S7の判別が“NO”の場合、S7の処理が繰り返し行われる。このように流星が出現しない場合における撮像された画像データは、例えば図3(a)に示すような真黒な画面の画像データ11となり、画像データの記録は行なわれず、画像データは捨てられる。一方、流星が出現し、撮像される画像の画角内に光が発生して、画素情報の差分に変化が生じると、S7の判別が“YES”となる。この場合、カメラ1のCPUは、S8において、撮像される画像データを記憶部に蓄積し始め、流星画像の画像データの取得、つまり撮影を開始する。このように流星が出現した場合の画像データは、例えば図3(b)に示すような、真黒な画面の左上方に光った流星12が点状に出現する画像データ11となる。
【0021】
カメラ1のCPUは、S9において、流星が流れ終って発生した流星の光が消え、画素情報の差分に変化が無くなったか否かを判別する。流星が流れ終わっておらず、S9の判別が“NO”の場合、S8およびS9の処理が繰り返し行なわれ、流星が撮影し続けられる。このように流星が流れている場合の画像データは、例えば図3(c)に示すような、真黒な画像の左上方から右下方へ光った流星12が線状に現れる画像データ11となる。一方、流星が流れ終わり、S9の判別が“YES”になると、カメラ1のCPUは、撮影を終了し、流星撮影モードを終了させる。このように流星が燃え尽きる場合の画像データは、例えば図3(d)に示すような、真黒な画面の右下方に流星12が点状に残る画像データ11となる。なお、複数の流星が出現する場合、S9の処理後に流星撮影モードを終了させずに、次に出現する流星を撮像するための、上述した流星撮影モードの撮影処理を再び開始する構成にしてもよい。
【0022】
このような本実施形態による撮像装置によれば、上記のように、流星情報取得手段により取得された流星12の軌道情報に基づいて、カメラ1が存在する位置から見える流星12の方向および流星12が光って出現する天空範囲が、PC4により演算して求められる。カメラ1の撮像方向は、PC4によって求められた方向に、駆動部2によって、図2,S3において駆動される。また、カメラ1の画角は、PC4によって求められた天空範囲に合う画角に、画角設定手段によりS5において設定される。本実施形態では、S5において、PC4により求められた天空範囲に合う画角がPC4のモニタに表示されて報知され、カメラ1の画角は使用者の回動操作に応じてズームレンズにより手動で調整される。このため、カメラ1の画角は、PC4のモニタにより報知される天空範囲に合う画角に使用者がカメラ1の画角を手動で調整することで、光って出現する流星12全体を1枚の画像内に収められる画角に設定される。
【0023】
カメラ1のCPUは、駆動部2によって駆動された撮像方向および画角設定手段によって設定された画角で、撮像手段により流星12を撮像させて、S8において流星画像を取得する。このため、DB6から取得された流星12の軌道情報に基づいて、カメラ1が存在する位置から見える流星12の方向にカメラ1の撮像方向が駆動され、流星12が光って出現する天空範囲に合う画角にカメラ1の画角が設定されることで、光って出現する流星12全体の画像を、例えば図3(c)に示すように1枚の画像内に収めて簡単に撮像できるようになる。
【0024】
また、本実施形態による撮像装置によれば、撮像手段により得られる画像データ11の画素情報に変化があった場合に、S7において、画像取得手段による流星画像の画像データ11の取得が撮像開始手段によって開始される。そして、撮像開始手段により画像データ11の取得が開始された後、撮像手段によりS8で得られる画像データ11の画素情報に変化が無くなった場合に、S9において、画像取得手段による流星画像の画像データ11の取得が撮像終了手段によって終了される。従って、流星12が出現して流星12の光が撮像手段に入射した場合に、画像データ11の画素情報に変化が発生して、自動的に流星画像の画像データ11の取得が開始される。このため、流星12が出現した場合に手動でカメラ1を操作して撮像する作業が不要になって利便性が向上すると共に、流星12の出現に気付かずにカメラ1を操作し忘れて流星画像を取り損ねることもなくなる。また、流星12が消えて流星12の光が撮像手段に入射しなくなった場合に、画像データ11の画素情報に変化が無くなって、自動的に流星画像の画像データ11の取得が終了される。このため、流星12が消えた後に、カメラ1が撮像を続けてしまい、無駄な撮像が行なわれることを防ぐことができる。また、長時間撮像した後に、流星12が出現した画像だけ抽出して編集するような手間のかかる作業を省くことができる。
【0025】
また、本実施形態による撮像装置によれば、流星情報取得手段により取得された、カメラ1が存在する位置から見える流星12の出現時刻の所定時間前から、撮像開始手段により、撮像手段により得られる画像データ11の画素情報に起きる変化が検出される。このため、実際には、流星12が出現する予定の出現時刻よりも早く流星12が出現しても、流星12の出現する予定の出現時刻ちょうどに撮像を開始する場合のように、この流星12を撮像し損ねることもなくなり、より確実に流星12を撮像することができる。
【0026】
なお、本実施形態では、PC4がカメラ1の画角を算出して、使用者が、PC4のモニタに表示される画角を見て、カメラ1の画角を手動で調節する構成であった。しかし、使用者の操作に応じてズームレンズにより調節された画角が、PC4などの演算手段により求められた天空範囲に合う画角と一致したことを報知する報知手段を、PC4のモニタなどとして備える構成にしてもよい。この構成によれば、カメラ1の画角は、使用者の操作に応じてズームレンズなどの画角手動調節手段により手動で調整され、使用者の操作に応じて画角手動調節手段により調節された画角が、演算手段により求められた天空範囲に合う画角と一致したことが、例えば、PC4のモニタに「OK」と表示されるなどして、報知手段により報知される。このため、画角手動調節手段の使用者の操作による画角の手動調節を、調節した画角が天空範囲に合う画角と一致したことが報知手段により報知された場合に止めることで、撮像手段の画角は、光って出現する流星12全体を1枚の画像内に収められる画角に設定される。
【0027】
また、画角設定手段は、入力される制御信号に応じてカメラに内蔵されたズームレンズの駆動モータを制御して撮像手段の画角を調節する、カメラのCPUなどで構成される画角自動調節手段と、撮像手段の画角が演算手段により求められた天空範囲に合う画角となる制御信号を画角自動調節手段へ出力する、PCなどで構成される画角制御手段とを備えて構成するようにしてもよい。この構成によれば、撮像手段の画角が演算手段により求められた天空範囲に合う画角となる制御信号が、PCなどの画角制御手段からカメラのCPUなどの画角自動調節手段へ送信される。撮像手段の画角は、PCなどから入力される制御信号に応じてカメラのCPUによりズームレンズ駆動モータの駆動が調節されることで、光って出現する流星12全体を1枚の画像内に収められる画角に設定される。このため、撮像手段の画角が流星12が出現する天空範囲に合う画角に自動的に設定されるため、流星12が出現する天空範囲に合う画角に撮像手段の画角を手動で調節する作業が不要となり、利便性が向上する。
【0028】
また、本実施形態では、流星12の出現時刻の所定時間前から、カメラ1の撮像手段により撮像される画像データの画素情報の差分を取って、撮像される画像データの画角内に光が発生したか否かの判別を開始する構成であった。しかし、カメラ1の撮像手段により撮像される画像データの画素情報の差分を取って、撮像される画像データの画角内に光が発生したか否かの判別を開始する時間は、流星12の出現時刻の所定時間前に限らず、流星12の出現時刻ちょうどであってもよい。
【0029】
また、本実施形態では、PC4が流星情報取得手段および演算手段を構成していたが、これらの手段をカメラ1内に構成し、PC4を用いずに撮像装置を構成するようにしてもよい。この場合、カメラ1が直接ネットワーク5を介してDB6に接続され、カメラ1は、DB6から流星の軌道情報を直接取得する。そして、カメラ1は、取得した流星の軌道情報に基づいて、カメラ1が存在する位置から見える流星の方向および流星が光って出現する天空範囲、並びにカメラ1の画角を演算して求める。さらに、カメラ1は、駆動部2に制御信号を出力して、演算して求めた方向に撮像方向を駆動して、上述した流星12の撮像を行なう。
【0030】
また、本実施形態では、カメラ1とPC4とは、図1に示すように有線で接続される構成であったが、カメラ1とPC4とは、無線で接続される構成であってもよい。
【0031】
このような各構成によっても、上述した実施形態と同様な作用効果が奏される。
【符号の説明】
【0032】
1…カメラ
2…駆動部
3…三脚
4…PC(パーソナルコンピュータ)
5…ネットワーク
6…DB(データベース)
11…画像データ
12…流星
【技術分野】
【0001】
本発明は、撮像手段により流星を撮像させて流星画像を取得する撮像装置に関する。
【背景技術】
【0002】
従来、この種の撮像装置としては、例えば、特許文献1に開示されたネットワーク利用の天体望遠システムがある。この天体望遠システムでは、端末PC(パーソナルコンピュータ)が、天文情報センターにネットワーク接続されており、また、カメラが取り付けられた天体望遠鏡に接続されている。ユーザが、端末PCから天文情報センターのホームページ上で天体望遠鏡の設置位置を入力すると、天文情報センターは、自己のデータベースを検索し、設置位置で観測できる星座や惑星等のニュースをホームページ上に表示する。表示された中から観測したい所望の星座等をユーザが選択すると、天文情報センターは、所望の星座等の赤経緯度をユーザの端末PCに通知する。天体望遠鏡は、端末PCがこの赤経緯度を天体望遠鏡の赤道儀に設定することで、ユーザが所望する星座等の観測を開始する。ユーザは、補助望遠鏡で星座等を確認しつつ、天体望遠鏡に取り付けられたカメラの撮影条件を設定して、カメラで所望の星座等の画像を撮影できる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−343592号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来の撮像装置では、ユーザが観測したい星座や惑星等の方向に天体望遠鏡を向けて、カメラで所望の星座等の画像を撮像できるが、流星が光って出現してから消えるまでの出現した流星全体を、1枚の画像内に収めて撮像することは困難であった。
【課題を解決するための手段】
【0005】
本発明はこのような課題を解決するためになされたもので、
被写体を撮像する撮像手段と、
撮像手段が存在する位置情報を取得する位置情報取得手段と、
データベースから流星の軌道情報を取得する流星情報取得手段と、
流星情報取得手段により取得された流星の軌道情報に基づいて、撮像手段が存在する位置から見える流星の方向および流星が光って出現する天空範囲を演算して求める演算手段と、
演算手段によって求められた方向に撮像手段の撮像方向を駆動する撮像方向駆動手段と、
演算手段によって求められた天空範囲に合う画角に撮像手段の画角を設定する画角設定手段と、
撮像方向駆動手段によって駆動された撮像方向および画角設定手段によって設定された画角で撮像手段により流星を撮像させて流星画像を取得する画像取得手段と
を備えて、撮像装置を構成した。
【発明の効果】
【0006】
本発明による撮像装置によれば、データベースから取得された流星の軌道情報に基づいて、撮像手段が存在する位置から見える流星の方向に撮像手段の撮像方向が駆動され、流星が光って出現する天空範囲に合う画角に撮像手段の画角が設定されることで、光って出現する流星全体の画像を1枚の画像内に収めて簡単に撮像できるようになる。
【図面の簡単な説明】
【0007】
【図1】本発明の一実施形態による撮像装置の概略構成を示す図である。
【図2】本実施形態の撮像装置によって行われる流星撮影処理の概略を示すフローチャートである。
【図3】図1に示すカメラにより撮像された、流星の出現前から流星が出現して消えるまでの画像データの概略を示す図である。
【発明を実施するための形態】
【0008】
次に、本発明による撮像装置を実施するための一形態について説明する。
【0009】
図1は、この一実施形態による撮像装置の概略構成を示す図である。
【0010】
撮像装置は、カメラ1、駆動部2、三脚3、およびPC4から構成されている。カメラ1の底部には駆動部2が設けられ、駆動部2は三脚3の上に設置されている。駆動部2は、モータを内蔵して構成され、PC4からの制御信号に応じてカメラ1の撮像方向を制御する。また、駆動部2にはI/F回路が内蔵されており、PC4からのカメラ1に対する制御信号、およびカメラ1の状態を示す種々の状態信号が、このI/F回路を介して、カメラ1およびPC4間で授受される。また、PC4は、ネットワーク5を介して、種々の天文情報を備えるDB(データベース)6に接続されている。
【0011】
カメラ1には、被写体を撮像する撮像手段を構成するCCD(Charge Coupled Device)センサなどが内蔵され、また、この撮像手段を有するカメラ1が存在する位置情報を取得するGPS(Global Positioning System)が位置情報取得手段として備えられている。カメラ1のGPSにより取得されたカメラ1の位置情報は、駆動部2を介してPC4へ出力される。PC4は、流星情報取得手段を構成し、使用者の操作に応じてこの位置情報をDB6へ送信し、DB6から、カメラ1の存在する位置から見える流星の軌道情報を取得する。ここで、流星の軌道情報とは、流星が大気圏へ突入する際の速度や入射角度、突入位置(方位、高度)、流星の大きさ、流星が大気圏へ突入して燃え始める時刻等の情報である。
【0012】
PC4は、取得したこの流星の情報を基に、流星が発光して燃え始めてから燃え尽きるまでの時間を算出し、また、流星が発光して燃え始めてから燃え尽きるまでの天空における距離や軌跡等を算出する。その後、演算手段を構成するPC4は、算出したこれらの情報に基づいて、カメラ1が存在する位置から見える流星の方向および流星が光って出現する天空範囲を演算して求め、流星が発光して燃え始めてから燃え尽きるまでに流星が通過する天空範囲に対応したカメラ1の画角を算出する。なお、流星が燃え尽きずに地上まで落下する場合や、流星が燃え尽きる位置を計算できない場合には、流星が発光を開始する位置から流星が落下する地上の位置までの天空範囲を含む画角が算出される。このように算出された画角は、PC4の不図示のモニタに表示される。PC4のモニタは、演算手段により求められた天空範囲に合うカメラ1の画角を報知する報知手段を構成する。
【0013】
カメラ1には、使用者の回動操作に応じてズーム角を変更して、撮像手段の画角を調整する不図示のズームレンズが画角手動調節手段として取り付けられている。使用者は、ズームレンズを操作してカメラ1の画角をモニタに表示された画角に設定する。ズームレンズおよびPC4のモニタは、演算手段によって求められた天空範囲に合う画角に撮像手段の画角を設定する画角設定手段を構成する。
【0014】
また、PC4は、流星の軌道情報から流星が出現する位置情報を演算すると、駆動部2に制御信号を送信し、駆動部2を駆動して、カメラ1の撮像方向を演算して求めた方向に向ける。駆動部2は、演算手段によって求められた方向に撮像手段の撮像方向を駆動する撮像方向駆動手段を構成する。また、演算手段を構成するPC4は、流星の軌道情報に基づいて、さらに、流星が発光する際の輝度を算出し、この輝度の流星を撮像するのに最適なカメラ1の露出値等の撮影条件を算出する。算出された撮影条件はPC4からカメラ1に送信され、カメラ1は撮影条件を受信した露出値等に合わせる。
【0015】
使用者がカメラ1の不図示のメニュー画面などで、撮影モードを流星撮影モードに設定すると、カメラ1は、撮像手段に撮像される画像データの画素情報を解析する流星監視状態となる。この流星監視状態では、カメラ1に内蔵されたCPU(Central Processing Unit)は、撮像手段に逐次得られる各画像データの画素情報の差分を取る。流星が光って出現するとこの差分に変化が生じる。この場合、カメラ1のCPUは、得られる画像データを記憶部に蓄積し始め、流星の画像データの取得を開始する。カメラ1のCPUは、駆動部2によって駆動された撮像方向および画角設定手段によって設定された画角で撮像手段により流星を撮像させて、流星画像を取得する画像取得手段を構成する。
【0016】
また、カメラ1のCPUは、撮像手段により得られる画像データの画素情報に変化があった場合に、画像取得手段に流星画像の画像データの取得を開始させる撮像開始手段を構成する。本実施形態では、この撮像開始手段は、流星情報取得手段により取得された、カメラ1が存在する位置から見える流星の出現時刻の所定時間前から、撮像手段により得られる画像データの画素情報に起きる変化を検出する。また、カメラ1のCPUは、撮像開始手段により画像データの取得が開始された後、撮像手段により得られる各画像データの画素情報の差分に変化が無くなった場合に、流星が燃え尽きて消滅したと判断する。この場合、撮像終了手段を構成するカメラ1のCPUは、画像取得手段による流星画像の画像データの取得を終了させる。
【0017】
図2は、本実施形態の撮像装置によって行われる流星撮影処理の概略を示すフローチャートである。
【0018】
使用者がカメラ1のメニュー画面などを操作して流星撮影モードを設定すると、撮像装置は、流星撮影モードでの撮影を開始する。この流星撮影モードでは、カメラ1のGPSにより取得されたカメラ1の位置情報がPC4へ出力され、PC4は、ステップ(以下、Sと記す)1において、カメラ1の撮影場所付近で見える流星の軌道情報をネットワーク5を介してDB6から取得する。次に、PC4は、S2において、DB6からの流星の軌道情報の取得が終了したか否かを判別する。流星の軌道情報の取得が終了しておらず、S2の判別が“NO”の場合、PC4は、S1の処理に戻り、流星の軌道情報を取得し続ける。
【0019】
一方、流星の軌道情報の取得が終了し、S2の判別が“YES”の場合、PC4は、S3において、落ちる時間が一番早い流星の方位にカメラ1を向ける制御信号を駆動部2へ送信し、駆動部2を駆動して、カメラ1の撮像方向を流星の方位に向ける。次に、PC4は、S4において、DB6から取得した流星の軌道情報から、上述したように、流星が燃え尽きる時間等を計算する。そして、S5において、この計算結果より、流星が光って出現する天空範囲に合うカメラ1の画角を計算し、計算したカメラ1の画角をモニタに表示する。この表示を見た使用者は、ズームレンズを回動操作して、カメラ1の画角を表示された画角に合わせる。また、PC4は、カメラ1から見える流星が最適に撮像されるカメラ1の撮影条件を算出し、算出した条件で撮像が行われるように、カメラ1に撮影条件の設定を行なう。
【0020】
次に、カメラ1のCPUは、S6において、現在の時間が流星が落ちる時間の所定時間前であるか否かを判別する。流星が落ちる時間の所定時間前ではなく、S6の判別が“NO”の場合、S6の処理が繰り返し行われる。一方、流星が落ちる時間の所定時間前になり、S6の判別が“YES”になると、カメラ1のCPUは、S7において、カメラ1の撮像手段により撮像される画像データの画素情報の解析を開始する。この解析では、各画像データの画素情報の差分を取って、撮像される画像データの画角内に光が発生したか否かを判別する。流星が出現しないために撮像された画像データの画角内に光が発生せず、画素情報の差分に変化が無くて、S7の判別が“NO”の場合、S7の処理が繰り返し行われる。このように流星が出現しない場合における撮像された画像データは、例えば図3(a)に示すような真黒な画面の画像データ11となり、画像データの記録は行なわれず、画像データは捨てられる。一方、流星が出現し、撮像される画像の画角内に光が発生して、画素情報の差分に変化が生じると、S7の判別が“YES”となる。この場合、カメラ1のCPUは、S8において、撮像される画像データを記憶部に蓄積し始め、流星画像の画像データの取得、つまり撮影を開始する。このように流星が出現した場合の画像データは、例えば図3(b)に示すような、真黒な画面の左上方に光った流星12が点状に出現する画像データ11となる。
【0021】
カメラ1のCPUは、S9において、流星が流れ終って発生した流星の光が消え、画素情報の差分に変化が無くなったか否かを判別する。流星が流れ終わっておらず、S9の判別が“NO”の場合、S8およびS9の処理が繰り返し行なわれ、流星が撮影し続けられる。このように流星が流れている場合の画像データは、例えば図3(c)に示すような、真黒な画像の左上方から右下方へ光った流星12が線状に現れる画像データ11となる。一方、流星が流れ終わり、S9の判別が“YES”になると、カメラ1のCPUは、撮影を終了し、流星撮影モードを終了させる。このように流星が燃え尽きる場合の画像データは、例えば図3(d)に示すような、真黒な画面の右下方に流星12が点状に残る画像データ11となる。なお、複数の流星が出現する場合、S9の処理後に流星撮影モードを終了させずに、次に出現する流星を撮像するための、上述した流星撮影モードの撮影処理を再び開始する構成にしてもよい。
【0022】
このような本実施形態による撮像装置によれば、上記のように、流星情報取得手段により取得された流星12の軌道情報に基づいて、カメラ1が存在する位置から見える流星12の方向および流星12が光って出現する天空範囲が、PC4により演算して求められる。カメラ1の撮像方向は、PC4によって求められた方向に、駆動部2によって、図2,S3において駆動される。また、カメラ1の画角は、PC4によって求められた天空範囲に合う画角に、画角設定手段によりS5において設定される。本実施形態では、S5において、PC4により求められた天空範囲に合う画角がPC4のモニタに表示されて報知され、カメラ1の画角は使用者の回動操作に応じてズームレンズにより手動で調整される。このため、カメラ1の画角は、PC4のモニタにより報知される天空範囲に合う画角に使用者がカメラ1の画角を手動で調整することで、光って出現する流星12全体を1枚の画像内に収められる画角に設定される。
【0023】
カメラ1のCPUは、駆動部2によって駆動された撮像方向および画角設定手段によって設定された画角で、撮像手段により流星12を撮像させて、S8において流星画像を取得する。このため、DB6から取得された流星12の軌道情報に基づいて、カメラ1が存在する位置から見える流星12の方向にカメラ1の撮像方向が駆動され、流星12が光って出現する天空範囲に合う画角にカメラ1の画角が設定されることで、光って出現する流星12全体の画像を、例えば図3(c)に示すように1枚の画像内に収めて簡単に撮像できるようになる。
【0024】
また、本実施形態による撮像装置によれば、撮像手段により得られる画像データ11の画素情報に変化があった場合に、S7において、画像取得手段による流星画像の画像データ11の取得が撮像開始手段によって開始される。そして、撮像開始手段により画像データ11の取得が開始された後、撮像手段によりS8で得られる画像データ11の画素情報に変化が無くなった場合に、S9において、画像取得手段による流星画像の画像データ11の取得が撮像終了手段によって終了される。従って、流星12が出現して流星12の光が撮像手段に入射した場合に、画像データ11の画素情報に変化が発生して、自動的に流星画像の画像データ11の取得が開始される。このため、流星12が出現した場合に手動でカメラ1を操作して撮像する作業が不要になって利便性が向上すると共に、流星12の出現に気付かずにカメラ1を操作し忘れて流星画像を取り損ねることもなくなる。また、流星12が消えて流星12の光が撮像手段に入射しなくなった場合に、画像データ11の画素情報に変化が無くなって、自動的に流星画像の画像データ11の取得が終了される。このため、流星12が消えた後に、カメラ1が撮像を続けてしまい、無駄な撮像が行なわれることを防ぐことができる。また、長時間撮像した後に、流星12が出現した画像だけ抽出して編集するような手間のかかる作業を省くことができる。
【0025】
また、本実施形態による撮像装置によれば、流星情報取得手段により取得された、カメラ1が存在する位置から見える流星12の出現時刻の所定時間前から、撮像開始手段により、撮像手段により得られる画像データ11の画素情報に起きる変化が検出される。このため、実際には、流星12が出現する予定の出現時刻よりも早く流星12が出現しても、流星12の出現する予定の出現時刻ちょうどに撮像を開始する場合のように、この流星12を撮像し損ねることもなくなり、より確実に流星12を撮像することができる。
【0026】
なお、本実施形態では、PC4がカメラ1の画角を算出して、使用者が、PC4のモニタに表示される画角を見て、カメラ1の画角を手動で調節する構成であった。しかし、使用者の操作に応じてズームレンズにより調節された画角が、PC4などの演算手段により求められた天空範囲に合う画角と一致したことを報知する報知手段を、PC4のモニタなどとして備える構成にしてもよい。この構成によれば、カメラ1の画角は、使用者の操作に応じてズームレンズなどの画角手動調節手段により手動で調整され、使用者の操作に応じて画角手動調節手段により調節された画角が、演算手段により求められた天空範囲に合う画角と一致したことが、例えば、PC4のモニタに「OK」と表示されるなどして、報知手段により報知される。このため、画角手動調節手段の使用者の操作による画角の手動調節を、調節した画角が天空範囲に合う画角と一致したことが報知手段により報知された場合に止めることで、撮像手段の画角は、光って出現する流星12全体を1枚の画像内に収められる画角に設定される。
【0027】
また、画角設定手段は、入力される制御信号に応じてカメラに内蔵されたズームレンズの駆動モータを制御して撮像手段の画角を調節する、カメラのCPUなどで構成される画角自動調節手段と、撮像手段の画角が演算手段により求められた天空範囲に合う画角となる制御信号を画角自動調節手段へ出力する、PCなどで構成される画角制御手段とを備えて構成するようにしてもよい。この構成によれば、撮像手段の画角が演算手段により求められた天空範囲に合う画角となる制御信号が、PCなどの画角制御手段からカメラのCPUなどの画角自動調節手段へ送信される。撮像手段の画角は、PCなどから入力される制御信号に応じてカメラのCPUによりズームレンズ駆動モータの駆動が調節されることで、光って出現する流星12全体を1枚の画像内に収められる画角に設定される。このため、撮像手段の画角が流星12が出現する天空範囲に合う画角に自動的に設定されるため、流星12が出現する天空範囲に合う画角に撮像手段の画角を手動で調節する作業が不要となり、利便性が向上する。
【0028】
また、本実施形態では、流星12の出現時刻の所定時間前から、カメラ1の撮像手段により撮像される画像データの画素情報の差分を取って、撮像される画像データの画角内に光が発生したか否かの判別を開始する構成であった。しかし、カメラ1の撮像手段により撮像される画像データの画素情報の差分を取って、撮像される画像データの画角内に光が発生したか否かの判別を開始する時間は、流星12の出現時刻の所定時間前に限らず、流星12の出現時刻ちょうどであってもよい。
【0029】
また、本実施形態では、PC4が流星情報取得手段および演算手段を構成していたが、これらの手段をカメラ1内に構成し、PC4を用いずに撮像装置を構成するようにしてもよい。この場合、カメラ1が直接ネットワーク5を介してDB6に接続され、カメラ1は、DB6から流星の軌道情報を直接取得する。そして、カメラ1は、取得した流星の軌道情報に基づいて、カメラ1が存在する位置から見える流星の方向および流星が光って出現する天空範囲、並びにカメラ1の画角を演算して求める。さらに、カメラ1は、駆動部2に制御信号を出力して、演算して求めた方向に撮像方向を駆動して、上述した流星12の撮像を行なう。
【0030】
また、本実施形態では、カメラ1とPC4とは、図1に示すように有線で接続される構成であったが、カメラ1とPC4とは、無線で接続される構成であってもよい。
【0031】
このような各構成によっても、上述した実施形態と同様な作用効果が奏される。
【符号の説明】
【0032】
1…カメラ
2…駆動部
3…三脚
4…PC(パーソナルコンピュータ)
5…ネットワーク
6…DB(データベース)
11…画像データ
12…流星
【特許請求の範囲】
【請求項1】
被写体を撮像する撮像手段と、
前記撮像手段が存在する位置情報を取得する位置情報取得手段と、
データベースから流星の軌道情報を取得する流星情報取得手段と、
前記流星情報取得手段により取得された流星の軌道情報に基づいて、前記撮像手段が存在する位置から見える流星の方向および流星が光って出現する天空範囲を演算して求める演算手段と、
前記演算手段によって求められた方向に前記撮像手段の撮像方向を駆動する撮像方向駆動手段と、
前記演算手段によって求められた天空範囲に合う画角に前記撮像手段の画角を設定する画角設定手段と、
前記撮像方向駆動手段によって駆動された撮像方向および前記画角設定手段によって設定された画角で前記撮像手段により流星を撮像させて流星画像を取得する画像取得手段と
を備える撮像装置。
【請求項2】
請求項1に記載の撮像装置において、
前記画角設定手段は、使用者の操作に応じて前記撮像手段の画角を調整する画角手動調節手段と、前記演算手段により求められた天空範囲に合う画角を報知する報知手段と
から構成されることを特徴とする撮像装置。
【請求項3】
請求項1に記載の撮像装置において、
前記画角設定手段は、使用者の操作に応じて前記撮像手段の画角を調整する画角手動調節手段と、使用者の操作に応じて前記画角手動調節手段により調節された画角が前記演算手段により求められた天空範囲に合う画角と一致したことを報知する報知手段と
から構成されることを特徴とする撮像装置。
【請求項4】
請求項1に記載の撮像装置において、
前記画角設定手段は、入力される制御信号に応じて前記撮像手段の画角を調節する画角自動調節手段と、前記撮像手段の画角が前記演算手段により求められた天空範囲に合う画角となる制御信号を前記画角自動調節手段へ出力する画角制御手段と
から構成されることを特徴とする撮像装置。
【請求項5】
請求項1から請求項4のいずれか1項に記載の撮像装置において、
前記撮像手段により得られる画像データの画素情報に変化があった場合に、前記画像取得手段に流星画像の画像データの取得を開始させる撮像開始手段と、
前記撮像開始手段により画像データの取得が開始された後、前記撮像手段により得られる画像データの画素情報に変化が無くなった場合に、前記画像取得手段に流星画像の画像データの取得を終了させる撮像終了手段と
を備えることを特徴とする撮像装置。
【請求項6】
請求項5に記載の撮像装置において、
前記撮像開始手段は、前記流星情報取得手段により取得された、前記撮像手段が存在する位置から見える流星の出現時刻の所定時間前から、前記撮像手段により得られる画像データの画素情報に起きる変化を検出する
ことを特徴とする撮像装置。
【請求項1】
被写体を撮像する撮像手段と、
前記撮像手段が存在する位置情報を取得する位置情報取得手段と、
データベースから流星の軌道情報を取得する流星情報取得手段と、
前記流星情報取得手段により取得された流星の軌道情報に基づいて、前記撮像手段が存在する位置から見える流星の方向および流星が光って出現する天空範囲を演算して求める演算手段と、
前記演算手段によって求められた方向に前記撮像手段の撮像方向を駆動する撮像方向駆動手段と、
前記演算手段によって求められた天空範囲に合う画角に前記撮像手段の画角を設定する画角設定手段と、
前記撮像方向駆動手段によって駆動された撮像方向および前記画角設定手段によって設定された画角で前記撮像手段により流星を撮像させて流星画像を取得する画像取得手段と
を備える撮像装置。
【請求項2】
請求項1に記載の撮像装置において、
前記画角設定手段は、使用者の操作に応じて前記撮像手段の画角を調整する画角手動調節手段と、前記演算手段により求められた天空範囲に合う画角を報知する報知手段と
から構成されることを特徴とする撮像装置。
【請求項3】
請求項1に記載の撮像装置において、
前記画角設定手段は、使用者の操作に応じて前記撮像手段の画角を調整する画角手動調節手段と、使用者の操作に応じて前記画角手動調節手段により調節された画角が前記演算手段により求められた天空範囲に合う画角と一致したことを報知する報知手段と
から構成されることを特徴とする撮像装置。
【請求項4】
請求項1に記載の撮像装置において、
前記画角設定手段は、入力される制御信号に応じて前記撮像手段の画角を調節する画角自動調節手段と、前記撮像手段の画角が前記演算手段により求められた天空範囲に合う画角となる制御信号を前記画角自動調節手段へ出力する画角制御手段と
から構成されることを特徴とする撮像装置。
【請求項5】
請求項1から請求項4のいずれか1項に記載の撮像装置において、
前記撮像手段により得られる画像データの画素情報に変化があった場合に、前記画像取得手段に流星画像の画像データの取得を開始させる撮像開始手段と、
前記撮像開始手段により画像データの取得が開始された後、前記撮像手段により得られる画像データの画素情報に変化が無くなった場合に、前記画像取得手段に流星画像の画像データの取得を終了させる撮像終了手段と
を備えることを特徴とする撮像装置。
【請求項6】
請求項5に記載の撮像装置において、
前記撮像開始手段は、前記流星情報取得手段により取得された、前記撮像手段が存在する位置から見える流星の出現時刻の所定時間前から、前記撮像手段により得られる画像データの画素情報に起きる変化を検出する
ことを特徴とする撮像装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2012−142673(P2012−142673A)
【公開日】平成24年7月26日(2012.7.26)
【国際特許分類】
【出願番号】特願2010−292097(P2010−292097)
【出願日】平成22年12月28日(2010.12.28)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
【公開日】平成24年7月26日(2012.7.26)
【国際特許分類】
【出願日】平成22年12月28日(2010.12.28)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
[ Back to top ]