
撮像装置
【課題】カメラを振っていないにもかかわらず、検出された振れ信号により誤補正され、撮影画像が揺れて見えてしまうのを防止する。
【解決手段】撮像光学系の光軸に垂直な方向に移動することにより、被写体像のぶれを補正する補正ユニットと、撮像光学系によって結像される被写体像を撮像する撮像素子と、撮像装置の振れを検出する振れ検出部と、振れ補正時には、振れ検出部で検出した振れに基づいて、被写体像のぶれを補正するように補正ユニットを駆動する駆動部と、撮像装置の少なくとも光軸方向の速度を検出する速度検出部と、速度検出部によって所定速度以上の速度が検出されたとき、振れ検出部で検出された撮像装置の振れに対する駆動部による補正ユニットのヨーイング方向の駆動の応答性が振れ補正時の応答性に比べて小さくなるように駆動部を制御する駆動制御部とを備える。
【解決手段】撮像光学系の光軸に垂直な方向に移動することにより、被写体像のぶれを補正する補正ユニットと、撮像光学系によって結像される被写体像を撮像する撮像素子と、撮像装置の振れを検出する振れ検出部と、振れ補正時には、振れ検出部で検出した振れに基づいて、被写体像のぶれを補正するように補正ユニットを駆動する駆動部と、撮像装置の少なくとも光軸方向の速度を検出する速度検出部と、速度検出部によって所定速度以上の速度が検出されたとき、振れ検出部で検出された撮像装置の振れに対する駆動部による補正ユニットのヨーイング方向の駆動の応答性が振れ補正時の応答性に比べて小さくなるように駆動部を制御する駆動制御部とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は撮像装置に関し、特に手振れに起因する画像のぶれを補正する機能を有する撮像装置に関するものである。
【背景技術】
【0002】
手振れ等の影響を低減する振れ補正装置を搭載するビデオカメラ等が製品化されている。この振れ補正装置は、角速度センサ、角加速度センサ等を用いてビデオカメラの揺れを直接測定し、その揺れをキャンセルする方向に光学的に撮影光軸を調整する振れ補正光学系を有している。振れ補正装置は、周波数検出手段で揺れの周波数を検出し、この周波数検出手段の検出出力に応じて特性設定手段で補正信号生成手段の補償特性を可変設定する。このため、撮影者が車中で撮影しているときには、出力信号の周波数に応じて補正信号生成手段の補償特性を最適化する装置が提案されている(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平09-051469号公報(第8頁、図1)
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、撮影中にカメラを横向きに振られたならばこの横向きの振れを補正させるのは正しい動作である。しかし、撮影者が車中で進行方向を撮影していてカーブに差し掛かった時や、進行方向に対して横向きに撮影していて加減速した時に、カメラはほぼ固定されているのにカメラを横向き振ったような揺れ信号が検出される。そのためカメラが揺れたと勘違いして振れ補正しようとすることになり、カメラを振っていないにもかかわらず撮影画像がフワフワ揺れて見えてしまうという課題がある。
【0005】
本発明は上述した課題に鑑みてなされたものであり、その目的は、カメラを振っていないにもかかわらず、検出された振れ信号により誤補正され、撮影画像が揺れて見えてしまうのを防止することである。
【課題を解決するための手段】
【0006】
本発明に係わる撮像装置は、撮像光学系の光軸に垂直な方向に移動することにより、前記撮像光学系により結像される被写体像のぶれを補正する補正ユニットと、前記撮像光学系によって結像される被写体像を撮像する撮像素子と、撮像装置の振れを検出する振れ検出手段と、振れ補正時には、前記振れ検出手段で検出した振れに基づいて、前記被写体像のぶれを補正するように前記補正ユニットを駆動する駆動手段と、前記撮像装置の少なくとも光軸方向の速度を検出する速度検出手段と、前記速度検出手段によって所定速度以上の速度が検出されたとき、前記振れ検出手段で検出された前記撮像装置の振れに対する前記駆動手段による前記補正ユニットのヨーイング方向の駆動の応答性が前記振れ補正時の応答性に比べて小さくなるように前記駆動手段を制御する駆動制御手段と、を備えることを特徴とする。
【発明の効果】
【0007】
本発明によれば、カメラを振っていないにもかかわらず、検出された振れ信号により誤補正され、撮影画像が揺れて見えてしまうのを防止することが可能となる。
【図面の簡単な説明】
【0008】
【図1】本発明の第1の実施形態に係わる撮像装置の構成を示すブロック図。
【図2】2軸加速度検出信号の処理原理を説明する図。
【図3】第1の実施形態の動作を示すフローチャート。
【図4】図3のフローチャートの補足説明に使う表。
【図5】図3のフローチャートの補足説明に使う図。
【図6】図3のフローチャートの補足説明に使うフローチャート。
【図7】第1の実施形態を適用した時の動作を説明するタイムチャート図。
【図8】本発明の第2の実施形態に係わる撮像装置の構成を示すブロック図。
【図9】第2の実施形態の動作を示すフローチャート。
【図10】第2の実施形態を適用した時の動作を説明するタイムチャート図。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について、図面を参照して詳細に説明する。
【0010】
(第1の実施形態)
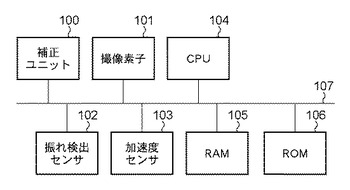
図1は本発明の第1の実施形態に係わる撮像装置の構成を示すブロック図である。図1において、撮像光学系のうちのシフトレンズを含む補正ユニット100は、光学的に撮像素子101よりも被写体側に位置し、CPU104からの制御信号によって光軸に垂直な方向に位置制御される。撮像光学系によって結像される被写体像を光電変換する撮像素子101から画像信号がRAM105へ一時的に記憶される。RAM105に記憶された画像信号は、コーデック(不図示)によって圧縮処理されて記録媒体(不図示)に記録される。
【0011】
振れ検出手段としての振れ検出センサ102からは撮像装置の振れを角速度として検出するジャイロ信号がCPU104に出力される。CPU104は振れ検出センサ102のジャイロ信号を信号処理して光軸補正量として算出し、補正ユニット100を位置制御する。
【0012】
加速度センサ103は2軸加速度センサで加速度検出信号を装置の移動速度を検出する速度検出手段であり、検出結果を速度情報としてCPU104に出力する。CPU104と各ブロックはバス107を介して接続されており、CPU104はROM106に格納されたプログラムをCPU104へコピーしたプログラムに従って各ブロックを制御する。操作部(不図示)からの操作内容はCPU104で読み取られる。
【0013】
また、CPU104は内部のパンニング制御部で、振れ検出センサ102からの振れ量の大きさに基づいて装置がパンニング状態(もしくはチルティング状態)であると判定する。パンニングとは、撮影者が装置を一方向に画角を変更するようなカメラ・ワークであり、振れ検出センサ102によって手振れ(1〜10Hz)より低い周波数の振れとして検出される。そしてパンニング制御部が、装置がパンニング状態であると判定すると、たとえばCPU104中のハイパスフィルタのカットオフ周波数を上げて振れの低周波数帯域成分をカットするような制御を行う。これは、積分器の時定数や補正量から引くオフセット量を変更することによって制御しても良い。いずれも、パンニング動作が振れ補正に反映されにくくするように制御する。
【0014】
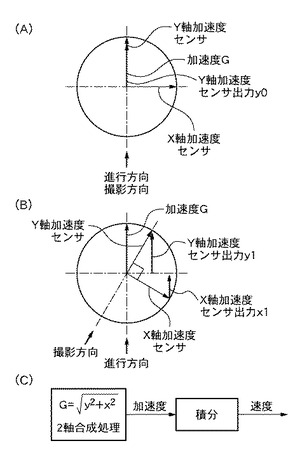
図2は、2軸加速度検出信号の処理原理を説明する図である。(A)は進行方向と撮影方向が一致している場合の図である。(B)は進行方向と撮影方向が一致していない場合の図である。(C)は加速度信号の処理のブロック図である。
【0015】
(A)では進行方向と撮影方向が一致しているので、撮像装置に取り付けられていて撮影方向即ち光軸方向の加速度を検出するY軸加速度センサの出力y0と加速度Gは等しい。光軸と水平に直交する方向の加速度を検出するX軸加速度センサの信号は出力されない。(B)では進行方向と撮影方向が一致していないので、加速度GはY軸加速度センサの出力y1とX軸加速度センサの出力x1として検出される。
【0016】
(A)、(B)のどちらの状態でもX軸とY軸のなす角度は90度であるので、(C)に示すように、
G=√(y2+x2) …(1)
によって2軸合成処理をCPU104で行えば、常に直進方向の加速度の絶対値Gを求めることができる。
【0017】
次にCPU104で(C)に示すように加速度に対して積分演算を行うことで速度を求めることができる。本実施形態では必要としないが、
θ=sin-1(y/G) …(2)
によって進行方向に対しての横向き度を求めることもできる。
【0018】
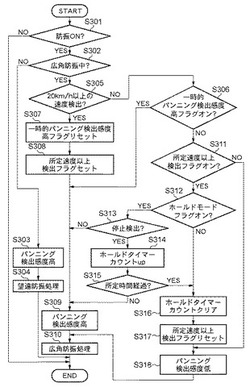
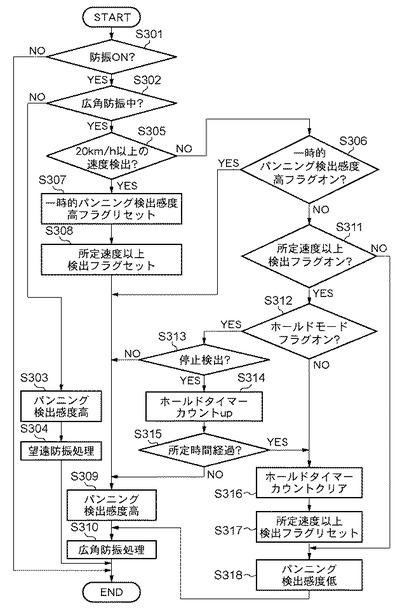
図3は、CPU104にて一定周期で実行される横方向即ちヨー方向の像ブレ補正制御プログラムのフローチャートである。図4は、図3のフローチャートの補足説明に使う表である。図5は、図3のフローチャートの補足説明に使う図である。図6は、図3のフローチャートの補足説明に使うフローチャートである。図7は、第1の実施形態を適用した時の動作を説明するタイムチャート図である。
【0019】
図3のS301において像ブレ補正機能がONであるかどうかを判断し、像ブレ補正機能がONでないなら処理を終了し、像ブレ補正機能がONであるならS302へ処理を移す。S302において広角側において振れ補正像ブレ補正中であるかどうかを判断し、広角側において像ブレ補正中で無いならS303へ処理を移し、広角側にて像ブレ補正中であるならS305へ処理を移す。なお、ズームレンズの広角側に応じて処理を変更するのは、広角側における像ブレ補正可能な範囲は、望遠側における像ブレ補正可能な範囲よりも大きく取れるからである。これは特に動画撮影の場合に効果があり、大きな振れが加わっても広角側では補正できる。以下のパンニング検出感度の「高」「低」とは、「高」ならパンニングを検出でき、「低」ならパンニングを検出しないとする。
【0020】
S303においてパンニング検出感度を「高」としてS304へ処理を移す。ここで、たとえばパンニング検出感度は、CPU104中のパンニング制御部がパンニング制御に移行する閾値の大きさを変更することによって、パンニング検出の感度を変更している。パンニング検出感度が「高」の場合は、通常時の閾値よりも小さな振れ量でパンニング制御に移行し、パンニング検出感度が「低」の場合は、通常時の閾値よりも大きな振れ量でパンニング制御に移行する。S304において補正範囲の小さい望遠側での像ブレ補正でジャイロ検出処理を行って補正量を求め、補正ユニット100を位置制御して処理を終わる。
【0021】
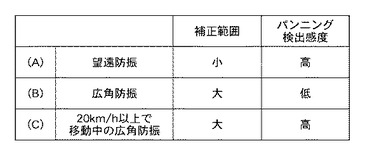
ここで、図4を用いて広角側での像ブレ補正と望遠側での像ブレ補正の違いについて説明する。図4の(A)行に示す望遠側での像ブレ補正とは、ズームアップした画角での像ブレ補正効果を狙った像ブレ補正で、少しの補正量でも画角が大きく変化して見えるので補正範囲を小さく制限し、パンニング検出感度は「高」である。図4の(B)行に示す広角側での像ブレ補正とは、ワイド画角での像ブレ補正効果を狙った像ブレ補正で、大きい補正量でも画角の変化が目立たないので補正範囲を大きくし、パンニング検出感度は「低」である。
【0022】
本実施形態では、補正範囲の大きい広角側での像ブレ補正のパンニング検出感度を「低」、補正範囲の小さい望遠側での像ブレ補正のパンニング検出感度を「高」としているが、パンニング検出感度が違う一例を示しただけであって発明の効果は補正範囲にはとらわれない。
【0023】
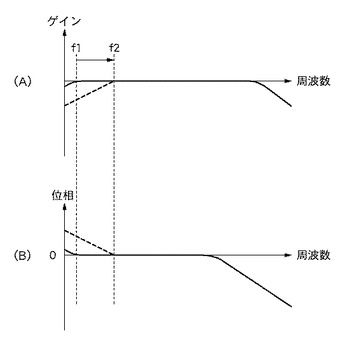
ここで、図5、図6を用いてパンニング検出感度とパンニング制御について説明する。(A)は像ブレ補正のゲインの周波数特性である。(B)は像ブレ補正の位相の周波数特性である。ゲインの周波数特性がフラットになる帯域が広いほど、カメラの振れる動きをキャンセルする性能が大きいことを示している。
【0024】
図5の実線はパンニング制御前、破線はパンニング制御後の周波数特性である。手振れ周波数はf1付近、f2は手振れ周波数より高い周波数、パンニング成分は限りなく0に近い直流近傍成分として検出される。パンニング中の限りなく0に近い直流成分を像ブレ補正に反映してしまうと、撮影者の意思でパンニングしているのに、元の画角を維持しようという像ブレ補正がかかるため画像が遅れてついてくるような不自然な画像になる。
【0025】
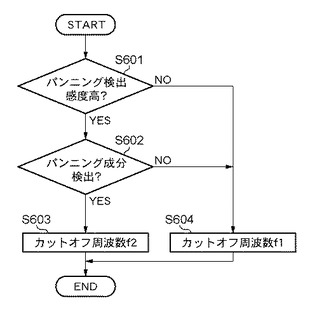
図6のCPU104のプログラムで実行されるジャイロ処理のフローチャートで説明する。S601においてパンニング検出感度が高であるかどうかを判断し、高ならS602へ処理を移し、低ならS604へ処理を移す。
【0026】
S602において限りなく0Hzに近い周波数のパンニング成分を検出したかどうかを判断し、検出したならS603へ処理を移し、検出していないならS604へ処理を移す。
【0027】
S603においてパンニング信号を検出しているのでパンニング制御としてゲイン特性のカットオフ周波数をf2として処理を終了する。その結果、パンニングによる限りなく0に近い直流成分は補正量に反映されなくなり、カメラの光軸は不必要に補正されずカメラ撮影方向と同軸で動き、画角がカメラのパンニングに自然に追従する画像になる。
【0028】
S604においてパンニング信号を検出していないのでパンニング制御としてゲイン特性のカットオフ周波数をf1として処理を終了する。乗り物などで移動する際に、撮影者がカメラを進行方向に固定しておりパンニングしているつもりはないのにカーブに差し掛かった時にパンニングしたような揺れ信号が検出される。また乗り物などで移動する際に、撮影者がカメラを進行方向に対して横向きに固定して撮影していてパンニングしているつもりはないのに、乗り物が加減速した時にパンニングしたような揺れ信号が検出される。パンニング検出感度が低であるとゲイン特性のカットオフ周波数をf2に上げるパンニング制御が動作しないため、被写体に対して固定画角にあるにもかかわらず、不要な補正をし、不自然に画像が揺れて見えてしまう。
【0029】
そこで本実施形態の主眼は、パンニング検出感度が低で撮影していた場合でも、所定の速度以上の移動速度を検出したら、パンニング制御に入るようにパンニング検出感度を高に切換え、限りなく0に近い直流振れ成分は補正量に反映させなくすることである。以下、本実施形態の主眼となる動作のフローチャートの説明に戻る。
【0030】
S305において、例えば20km/h以上の速度を検出したかどうかを判断し、検出しないならS306へ処理を移し、検出したならS307へ処理を移す。S306において一時的パンニング感度高フラグがオンかどうかを判断し、フラグオンを検出しないならS311へ処理を移し、検出したならS309へ処理を移す。
【0031】
一時的パンニング感度高フラグは、CPU104のボタン操作検出プログラム内でユーザー意思による一時的パンニング感度高ボタン(不図示)の操作を検出した時点でオンにされている。一時的パンニング感度高ボタンは現在のパンニング感度にかかわらず強制的にパンニング感度を高にしたい時に使うボタンである。例えば、発進時、停止時など所定速度以下でも、加速変動の発生が見込まれる時に使う。
【0032】
S307において、20km/h以上の速度を検出している時点でパンニング検出感度が高になるので、一時的パンニング感度高フラグをリセットしてS308へ処理を移す。S308において、20km/h以上の速度を検出したので、所定速度以上検出フラグをセットしてS309へ処理を移す。S309において、パンニング検出感度を高にしてS310へ処理を移す。S310において、補正範囲の広い像ブレ補正広角側での像ブレ補正でジャイロ検出処理を行って補正量を求め、補正ユニット100を位置制御して処理を終わる。
【0033】
S311では、所定速度以上検出フラグがオンかどうかを判断し、フラグオンを検出しないならS318へ処理を移し、検出したならS312へ処理を移す。S312においてホールドモードフラグがオンかどうかを判断し、フラグオンを検出しないならS316へ処理を移し、検出したならS313へ処理を移す。
【0034】
ホールドモードフラグは、CPU104のメニュー設定プログラム内でユーザー意思によるホールドモードを選択された時点でオンにされている。ホールドモードは、一度20km/h以上になったら、必ず止る時に加速度変動が起きるであろうから、その後20km/h以下になって更に停止しても暫くの間、パンニング感度を高でホールド動作してほしい時に選択するモードである。停止時に手動で一時的パンニング感度高ボタンを操作するなら、ホールドモードを選択する必要は無い。
【0035】
S313において停止を検出したかどうかを判断し、停止検出しないならS309へ処理を移し、停止検出したならS314へ処理を移す。S314において、停止後も所定時間だけパンニング感度高で維持するためのホールドタイマーをカウントアップしてS315へ処理を移す。S315において所定時間経過したかどうかを判断し、経過していないならS309へ処理を移し、経過したならS316へ処理を移す。
【0036】
S316において、ホールドタイマーをカウントクリアしてS317へ処理を移す。S317において、所定速度以上検出フラグをリセットしてS318へ処理を移す。S318において、パンニング検出感度を低にしてS310へ処理を移す。
【0037】
S310において、S309からのフローと同様に補正範囲の広い像ブレ補正広角側での像ブレ補正でジャイロ検出処理を行って補正量を求め、振れ補正ユニット100を位置制御して処理を終わる。
【0038】
上記のように、本実施形態では、撮像装置の特定の周波数帯域を含む振れを検出する振れ検出手段であって、特定の周波数帯域のうちの低周波数帯域の振れを検出する第1の検出手段と特定の周波数帯域のうち低周波帯域よりも高い周波数帯域の振れを検出する第2の検出手段とを有する。
【0039】
本実施形態では、手持ち撮影を想定してパンニング検出感度を高低の2段階としているが、厳密に手持ち撮影を想定したパンニング検出感度と、高速移動時のパンニング検出感度は同じにする必要は無い。高速移動時のパンニング検出が出来る範囲内で違う閾値のパンニング検出感度を設けても構わない。
【0040】
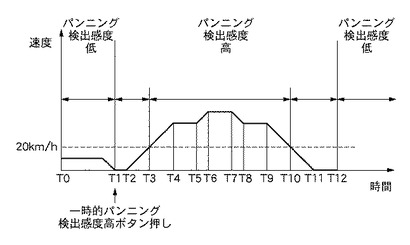
図7は第1の実施形態を適用した時の動作を説明するタイムチャート図である。横軸は時間、縦軸は検出速度である。時間T0からパンニング検出感度が低の像ブレ補正状態で撮影していたものとする。撮影者はそろそろ発車しそうなので時間T1で一時的にパンニング検出感度を高にする一時的パンニング検出感度高ボタン(不図示)を押したので、時間T1からパンニング検出感度は高に切り替わる。
【0041】
時間T2で停止から加速に変化した時にはパンニング検出感度は高になっているので、パンニング制御が働き、カメラの光軸は不必要に補正されず、不自然な画角ふらつきが発生しない。時間T3からは20km/h以上の速度が検出されているので、パンニング検出感度は高で維持される。
【0042】
時間T4、T5、T6、T7、T8、T9のように加速度変動が発生してもパンニング検出感度は高になっているので、パンニング制御が働き、カメラの光軸は不必要に補正されずに撮影方向を向いているので不自然な画角ふらつきが発生しない。
【0043】
操作部(不図示)からメニュー設定をホールドモードに設定しておくと時間T10で20km/h以下が検出されても、パンニング検出感度は高でホールド(継続)される。時間T11のように減速から停止の瞬間に加速度変動が発生しても、所定時間はパンニング検出感度が高にホールドされているので、カメラの光軸は不必要に補正されずに撮影方向を向いているので、不自然な画角ふらつきが発生しない。
【0044】
時間T12 からは自動的に元々の設定であるパンニング検出感度が低の状態に切り替わり、歩きながらの撮影のようなカメラの大きい振れを補正する像ブレ補正に戻る。
【0045】
以上のように、本実施形態では、一時的パンニング検出感度高ボタンの操作、あるいは20km/h以上の速度の移動を検出した場合に、パンニング検出感度が低であっても高に切り換わる。すなわち、振れ検出手段で検出された撮像装置の振れに対する駆動手段による補正ユニットのヨーイング方向の駆動の応答性が振れ補正時の応答性に比べて小さくなるように駆動手段を制御する駆動制御手段を備える。これにより、カメラの光軸は不必要に補正されずに不自然な画角ふらつきが発生しないという効果がある。
【0046】
なお、第1の実施形態は、振れ補正手段として光学補正の例を記述しているが、本実施形態の主眼は補正量の算出にあるので、公知の画像切り出し式の振れ補正方式でも実施可能である。振れ補正方法は画像処理によるものであっても問題ないことは、後述の説明から明らかである。
【0047】
(第2の実施形態)
図8は本発明の第2の実施形態に係わる撮像装置のブロック図である。第1の実施形態と同じ番号は同じ構成なので説明は省略する。
【0048】
GPS受信部803はGPS衛星からの電波を捕捉するGPS受信アンテナを備え、このGPS受信アンテナを通じてGPS衛星からのGPS信号を受信して現在位置を測位し、CPU104に位置情報を出力する。CPU104にて、測位変化と経過時間から速度を求めることができるのは公知なので詳細な説明は省略する。
【0049】
図9は、CPU104にて一定周期で実行される横方向即ちヨーイング方向の像ブレ補正制御プログラムのフローチャートである。
【0050】
S901において像ブレ補正がONであるかどうかを判断し、像ブレ補正がONでないなら処理を終了し、像ブレ補正ONであるならS902へ処理を移す。S902において20km/h以上の速度を検出したかどうかを判断し、検出しないならS903へ処理を移し、検出したならS904へ処理を移す。
【0051】
S903において一時的横像ブレ補正オフフラグがオンかどうかを判断し、フラグオンを検出しないならS909へ処理を移し、検出したならS908へ処理を移す。一時的横像ブレ補正オフフラグは、CPU104のボタン操作検出プログラム内でユーザー意思による一時的横像ブレ補正オフボタン(不図示)の操作を検出した時点でオンにされている。一時的横像ブレ補正オフボタンは現在の像ブレ補正の動作状態にかかわらず強制的に横像ブレ補正オフにしたい時に使うボタンである。例えば、発進時、停止時など所定速度以下でも、加速変動の発生が見込まれる時に使う。
【0052】
S904において、20km/h以上の速度を検出した場合での横像ブレ補正オフへの像ブレ補正自動切換許可フラグがオンかどうかを判断し、オンならS906へ処理を移し、オフならS905へ処理を移す。横像ブレ補正オフへの像ブレ補正自動切換許可フラグは、CPU104のボタン操作検出プログラム内でユーザー意思による像ブレ補正自動切換許可(可否)を選択する操作(選択可能)を検出した時点でオンにされている。
【0053】
S905において、ジャイロ検出処理を行って補正量を求め、補正ユニット100を位置制御して処理を終わる。
【0054】
S906において、20km/h以上の速度を検出している時点で横方向の像ブレ補正処理が休止になるので、一時的横方向の像ブレ補正オフフラグをリセットしてS907へ処理を移す。S907において、20km/h以上の速度を検出したので、所定速度以上検出フラグをセットしてS908へ処理を移す。
【0055】
S908において、像ブレ補正処理休止に入り、休止なのでジャイロ検出処理を行わず補正量を中心固定として、補正ユニット100を位置制御して処理を終わる。
【0056】
S909において所定速度以上検出フラグがオンかどうかを判断し、フラグオンを検出しないならS916へ処理を移し、検出したならS910へ処理を移す。
【0057】
S910においてホールドモードフラグがオンかどうかを判断し、フラグオンを検出しないならS914へ処理を移し、検出したならS911へ処理を移す。ホールドモードフラグは、CPU104のメニュー設定プログラム内でユーザー意思によるホールドモードを選択された時点でオンにされている。ホールドモードは、一度20km/h以上になったら、必ず止る時に加速度変動が起きるであろうから、その後20km/h以下になって更に停止しても暫くの間、横方向の像ブレ補正オフでホールド動作してほしい時に選択するモードである。停止時に手動で一時的横方向の像ブレ補正オフボタンを操作するなら、ホールドモードを選択する必要は無い。
【0058】
S911において停止を検出したかどうかを判断し、停止を検出しないならS908へ処理を移し、停止を検出したならS912へ処理を移す。S912において、停止後も所定時間だけ横方向の像ブレ補正オフで維持するためのホールドタイマーをカウントアップしてS913へ処理を移す。S913において所定時間経過したかどうかを判断し、経過していないならS908へ処理を移し、経過したならS914へ処理を移す。
【0059】
S914において、ホールドタイマーをカウントクリアしてS915へ処理を移す。S915において、所定速度以上検出フラグをリセットしてS916へ処理を移す。S916において、像ブレ補正処理に入り、ジャイロ検出処理を行って補正量を求め、補正ユニット100を位置制御して処理を終わる。
【0060】
図10は第2の実施形態を適用した時の動作を説明するタイムチャート図である。横軸は時間、縦軸は検出速度である。時間T0から縦方向の像ブレ補正オン、横方向の像ブレ補正オンで撮影していたものとする。
【0061】
撮影者はそろそろ発車しそうなので時間T1で一時的に横方向の像ブレ補正をオフにする一時的横方向の像ブレ補正オフボタン(不図示)を押したので、時間T1から横方向の像ブレ補正はオフに切り替わる。時間T2で停止から加速に変化した時には横方向は横方向の像ブレ補正オフでCPU104が行う補正ユニット100の位置制御は中心固定になっているので、カメラの光軸は動かず、不自然な画角ふらつきが発生しない。
【0062】
時間T3からは20km/h以上の速度が検出されているので、横方向は横方向の像ブレ補正オフで維持される。時間T4、T5、T6、T7、T8、T9のように加速度変動が発生しても横方向は横方向の像ブレ補正オフで中心固定に位置制御されており、カメラの光軸は動かずに撮影方向を向き続けるので不自然な画角ふらつきが発生しない。
【0063】
操作部(不図示)からメニュー設定をホールドモードに設定しておくと時間T10で20km/h以下が検出されても、横方向は横方向の像ブレ補正オフでホールドされる。時間T11のように減速から停止の瞬間に加速度変動が発生しても、所定時間だけ横方向は横方向の像ブレ補正オフにホールドされて、カメラの光軸は動かないので、不自然な画角ふらつきが発生しない。
【0064】
時間T12 からは自動的に元々の設定である横方向の横方向の像ブレ補正オンに切り替わり、歩きながらの撮影のようなカメラの大きい振れを補正する像ブレ補正に戻る。
【0065】
以上のように、一時的横方向の像ブレ補正オフボタンの操作、あるいは20km/h以上の速度の移動を検出した場合に、横方向の像ブレ補正がオンであっても横方向の像ブレ補正オフに切り換わることで、カメラの光軸は固定で動かず不自然な画角ふらつきが発生しないという効果がある。
【技術分野】
【0001】
本発明は撮像装置に関し、特に手振れに起因する画像のぶれを補正する機能を有する撮像装置に関するものである。
【背景技術】
【0002】
手振れ等の影響を低減する振れ補正装置を搭載するビデオカメラ等が製品化されている。この振れ補正装置は、角速度センサ、角加速度センサ等を用いてビデオカメラの揺れを直接測定し、その揺れをキャンセルする方向に光学的に撮影光軸を調整する振れ補正光学系を有している。振れ補正装置は、周波数検出手段で揺れの周波数を検出し、この周波数検出手段の検出出力に応じて特性設定手段で補正信号生成手段の補償特性を可変設定する。このため、撮影者が車中で撮影しているときには、出力信号の周波数に応じて補正信号生成手段の補償特性を最適化する装置が提案されている(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平09-051469号公報(第8頁、図1)
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、撮影中にカメラを横向きに振られたならばこの横向きの振れを補正させるのは正しい動作である。しかし、撮影者が車中で進行方向を撮影していてカーブに差し掛かった時や、進行方向に対して横向きに撮影していて加減速した時に、カメラはほぼ固定されているのにカメラを横向き振ったような揺れ信号が検出される。そのためカメラが揺れたと勘違いして振れ補正しようとすることになり、カメラを振っていないにもかかわらず撮影画像がフワフワ揺れて見えてしまうという課題がある。
【0005】
本発明は上述した課題に鑑みてなされたものであり、その目的は、カメラを振っていないにもかかわらず、検出された振れ信号により誤補正され、撮影画像が揺れて見えてしまうのを防止することである。
【課題を解決するための手段】
【0006】
本発明に係わる撮像装置は、撮像光学系の光軸に垂直な方向に移動することにより、前記撮像光学系により結像される被写体像のぶれを補正する補正ユニットと、前記撮像光学系によって結像される被写体像を撮像する撮像素子と、撮像装置の振れを検出する振れ検出手段と、振れ補正時には、前記振れ検出手段で検出した振れに基づいて、前記被写体像のぶれを補正するように前記補正ユニットを駆動する駆動手段と、前記撮像装置の少なくとも光軸方向の速度を検出する速度検出手段と、前記速度検出手段によって所定速度以上の速度が検出されたとき、前記振れ検出手段で検出された前記撮像装置の振れに対する前記駆動手段による前記補正ユニットのヨーイング方向の駆動の応答性が前記振れ補正時の応答性に比べて小さくなるように前記駆動手段を制御する駆動制御手段と、を備えることを特徴とする。
【発明の効果】
【0007】
本発明によれば、カメラを振っていないにもかかわらず、検出された振れ信号により誤補正され、撮影画像が揺れて見えてしまうのを防止することが可能となる。
【図面の簡単な説明】
【0008】
【図1】本発明の第1の実施形態に係わる撮像装置の構成を示すブロック図。
【図2】2軸加速度検出信号の処理原理を説明する図。
【図3】第1の実施形態の動作を示すフローチャート。
【図4】図3のフローチャートの補足説明に使う表。
【図5】図3のフローチャートの補足説明に使う図。
【図6】図3のフローチャートの補足説明に使うフローチャート。
【図7】第1の実施形態を適用した時の動作を説明するタイムチャート図。
【図8】本発明の第2の実施形態に係わる撮像装置の構成を示すブロック図。
【図9】第2の実施形態の動作を示すフローチャート。
【図10】第2の実施形態を適用した時の動作を説明するタイムチャート図。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について、図面を参照して詳細に説明する。
【0010】
(第1の実施形態)
図1は本発明の第1の実施形態に係わる撮像装置の構成を示すブロック図である。図1において、撮像光学系のうちのシフトレンズを含む補正ユニット100は、光学的に撮像素子101よりも被写体側に位置し、CPU104からの制御信号によって光軸に垂直な方向に位置制御される。撮像光学系によって結像される被写体像を光電変換する撮像素子101から画像信号がRAM105へ一時的に記憶される。RAM105に記憶された画像信号は、コーデック(不図示)によって圧縮処理されて記録媒体(不図示)に記録される。
【0011】
振れ検出手段としての振れ検出センサ102からは撮像装置の振れを角速度として検出するジャイロ信号がCPU104に出力される。CPU104は振れ検出センサ102のジャイロ信号を信号処理して光軸補正量として算出し、補正ユニット100を位置制御する。
【0012】
加速度センサ103は2軸加速度センサで加速度検出信号を装置の移動速度を検出する速度検出手段であり、検出結果を速度情報としてCPU104に出力する。CPU104と各ブロックはバス107を介して接続されており、CPU104はROM106に格納されたプログラムをCPU104へコピーしたプログラムに従って各ブロックを制御する。操作部(不図示)からの操作内容はCPU104で読み取られる。
【0013】
また、CPU104は内部のパンニング制御部で、振れ検出センサ102からの振れ量の大きさに基づいて装置がパンニング状態(もしくはチルティング状態)であると判定する。パンニングとは、撮影者が装置を一方向に画角を変更するようなカメラ・ワークであり、振れ検出センサ102によって手振れ(1〜10Hz)より低い周波数の振れとして検出される。そしてパンニング制御部が、装置がパンニング状態であると判定すると、たとえばCPU104中のハイパスフィルタのカットオフ周波数を上げて振れの低周波数帯域成分をカットするような制御を行う。これは、積分器の時定数や補正量から引くオフセット量を変更することによって制御しても良い。いずれも、パンニング動作が振れ補正に反映されにくくするように制御する。
【0014】
図2は、2軸加速度検出信号の処理原理を説明する図である。(A)は進行方向と撮影方向が一致している場合の図である。(B)は進行方向と撮影方向が一致していない場合の図である。(C)は加速度信号の処理のブロック図である。
【0015】
(A)では進行方向と撮影方向が一致しているので、撮像装置に取り付けられていて撮影方向即ち光軸方向の加速度を検出するY軸加速度センサの出力y0と加速度Gは等しい。光軸と水平に直交する方向の加速度を検出するX軸加速度センサの信号は出力されない。(B)では進行方向と撮影方向が一致していないので、加速度GはY軸加速度センサの出力y1とX軸加速度センサの出力x1として検出される。
【0016】
(A)、(B)のどちらの状態でもX軸とY軸のなす角度は90度であるので、(C)に示すように、
G=√(y2+x2) …(1)
によって2軸合成処理をCPU104で行えば、常に直進方向の加速度の絶対値Gを求めることができる。
【0017】
次にCPU104で(C)に示すように加速度に対して積分演算を行うことで速度を求めることができる。本実施形態では必要としないが、
θ=sin-1(y/G) …(2)
によって進行方向に対しての横向き度を求めることもできる。
【0018】
図3は、CPU104にて一定周期で実行される横方向即ちヨー方向の像ブレ補正制御プログラムのフローチャートである。図4は、図3のフローチャートの補足説明に使う表である。図5は、図3のフローチャートの補足説明に使う図である。図6は、図3のフローチャートの補足説明に使うフローチャートである。図7は、第1の実施形態を適用した時の動作を説明するタイムチャート図である。
【0019】
図3のS301において像ブレ補正機能がONであるかどうかを判断し、像ブレ補正機能がONでないなら処理を終了し、像ブレ補正機能がONであるならS302へ処理を移す。S302において広角側において振れ補正像ブレ補正中であるかどうかを判断し、広角側において像ブレ補正中で無いならS303へ処理を移し、広角側にて像ブレ補正中であるならS305へ処理を移す。なお、ズームレンズの広角側に応じて処理を変更するのは、広角側における像ブレ補正可能な範囲は、望遠側における像ブレ補正可能な範囲よりも大きく取れるからである。これは特に動画撮影の場合に効果があり、大きな振れが加わっても広角側では補正できる。以下のパンニング検出感度の「高」「低」とは、「高」ならパンニングを検出でき、「低」ならパンニングを検出しないとする。
【0020】
S303においてパンニング検出感度を「高」としてS304へ処理を移す。ここで、たとえばパンニング検出感度は、CPU104中のパンニング制御部がパンニング制御に移行する閾値の大きさを変更することによって、パンニング検出の感度を変更している。パンニング検出感度が「高」の場合は、通常時の閾値よりも小さな振れ量でパンニング制御に移行し、パンニング検出感度が「低」の場合は、通常時の閾値よりも大きな振れ量でパンニング制御に移行する。S304において補正範囲の小さい望遠側での像ブレ補正でジャイロ検出処理を行って補正量を求め、補正ユニット100を位置制御して処理を終わる。
【0021】
ここで、図4を用いて広角側での像ブレ補正と望遠側での像ブレ補正の違いについて説明する。図4の(A)行に示す望遠側での像ブレ補正とは、ズームアップした画角での像ブレ補正効果を狙った像ブレ補正で、少しの補正量でも画角が大きく変化して見えるので補正範囲を小さく制限し、パンニング検出感度は「高」である。図4の(B)行に示す広角側での像ブレ補正とは、ワイド画角での像ブレ補正効果を狙った像ブレ補正で、大きい補正量でも画角の変化が目立たないので補正範囲を大きくし、パンニング検出感度は「低」である。
【0022】
本実施形態では、補正範囲の大きい広角側での像ブレ補正のパンニング検出感度を「低」、補正範囲の小さい望遠側での像ブレ補正のパンニング検出感度を「高」としているが、パンニング検出感度が違う一例を示しただけであって発明の効果は補正範囲にはとらわれない。
【0023】
ここで、図5、図6を用いてパンニング検出感度とパンニング制御について説明する。(A)は像ブレ補正のゲインの周波数特性である。(B)は像ブレ補正の位相の周波数特性である。ゲインの周波数特性がフラットになる帯域が広いほど、カメラの振れる動きをキャンセルする性能が大きいことを示している。
【0024】
図5の実線はパンニング制御前、破線はパンニング制御後の周波数特性である。手振れ周波数はf1付近、f2は手振れ周波数より高い周波数、パンニング成分は限りなく0に近い直流近傍成分として検出される。パンニング中の限りなく0に近い直流成分を像ブレ補正に反映してしまうと、撮影者の意思でパンニングしているのに、元の画角を維持しようという像ブレ補正がかかるため画像が遅れてついてくるような不自然な画像になる。
【0025】
図6のCPU104のプログラムで実行されるジャイロ処理のフローチャートで説明する。S601においてパンニング検出感度が高であるかどうかを判断し、高ならS602へ処理を移し、低ならS604へ処理を移す。
【0026】
S602において限りなく0Hzに近い周波数のパンニング成分を検出したかどうかを判断し、検出したならS603へ処理を移し、検出していないならS604へ処理を移す。
【0027】
S603においてパンニング信号を検出しているのでパンニング制御としてゲイン特性のカットオフ周波数をf2として処理を終了する。その結果、パンニングによる限りなく0に近い直流成分は補正量に反映されなくなり、カメラの光軸は不必要に補正されずカメラ撮影方向と同軸で動き、画角がカメラのパンニングに自然に追従する画像になる。
【0028】
S604においてパンニング信号を検出していないのでパンニング制御としてゲイン特性のカットオフ周波数をf1として処理を終了する。乗り物などで移動する際に、撮影者がカメラを進行方向に固定しておりパンニングしているつもりはないのにカーブに差し掛かった時にパンニングしたような揺れ信号が検出される。また乗り物などで移動する際に、撮影者がカメラを進行方向に対して横向きに固定して撮影していてパンニングしているつもりはないのに、乗り物が加減速した時にパンニングしたような揺れ信号が検出される。パンニング検出感度が低であるとゲイン特性のカットオフ周波数をf2に上げるパンニング制御が動作しないため、被写体に対して固定画角にあるにもかかわらず、不要な補正をし、不自然に画像が揺れて見えてしまう。
【0029】
そこで本実施形態の主眼は、パンニング検出感度が低で撮影していた場合でも、所定の速度以上の移動速度を検出したら、パンニング制御に入るようにパンニング検出感度を高に切換え、限りなく0に近い直流振れ成分は補正量に反映させなくすることである。以下、本実施形態の主眼となる動作のフローチャートの説明に戻る。
【0030】
S305において、例えば20km/h以上の速度を検出したかどうかを判断し、検出しないならS306へ処理を移し、検出したならS307へ処理を移す。S306において一時的パンニング感度高フラグがオンかどうかを判断し、フラグオンを検出しないならS311へ処理を移し、検出したならS309へ処理を移す。
【0031】
一時的パンニング感度高フラグは、CPU104のボタン操作検出プログラム内でユーザー意思による一時的パンニング感度高ボタン(不図示)の操作を検出した時点でオンにされている。一時的パンニング感度高ボタンは現在のパンニング感度にかかわらず強制的にパンニング感度を高にしたい時に使うボタンである。例えば、発進時、停止時など所定速度以下でも、加速変動の発生が見込まれる時に使う。
【0032】
S307において、20km/h以上の速度を検出している時点でパンニング検出感度が高になるので、一時的パンニング感度高フラグをリセットしてS308へ処理を移す。S308において、20km/h以上の速度を検出したので、所定速度以上検出フラグをセットしてS309へ処理を移す。S309において、パンニング検出感度を高にしてS310へ処理を移す。S310において、補正範囲の広い像ブレ補正広角側での像ブレ補正でジャイロ検出処理を行って補正量を求め、補正ユニット100を位置制御して処理を終わる。
【0033】
S311では、所定速度以上検出フラグがオンかどうかを判断し、フラグオンを検出しないならS318へ処理を移し、検出したならS312へ処理を移す。S312においてホールドモードフラグがオンかどうかを判断し、フラグオンを検出しないならS316へ処理を移し、検出したならS313へ処理を移す。
【0034】
ホールドモードフラグは、CPU104のメニュー設定プログラム内でユーザー意思によるホールドモードを選択された時点でオンにされている。ホールドモードは、一度20km/h以上になったら、必ず止る時に加速度変動が起きるであろうから、その後20km/h以下になって更に停止しても暫くの間、パンニング感度を高でホールド動作してほしい時に選択するモードである。停止時に手動で一時的パンニング感度高ボタンを操作するなら、ホールドモードを選択する必要は無い。
【0035】
S313において停止を検出したかどうかを判断し、停止検出しないならS309へ処理を移し、停止検出したならS314へ処理を移す。S314において、停止後も所定時間だけパンニング感度高で維持するためのホールドタイマーをカウントアップしてS315へ処理を移す。S315において所定時間経過したかどうかを判断し、経過していないならS309へ処理を移し、経過したならS316へ処理を移す。
【0036】
S316において、ホールドタイマーをカウントクリアしてS317へ処理を移す。S317において、所定速度以上検出フラグをリセットしてS318へ処理を移す。S318において、パンニング検出感度を低にしてS310へ処理を移す。
【0037】
S310において、S309からのフローと同様に補正範囲の広い像ブレ補正広角側での像ブレ補正でジャイロ検出処理を行って補正量を求め、振れ補正ユニット100を位置制御して処理を終わる。
【0038】
上記のように、本実施形態では、撮像装置の特定の周波数帯域を含む振れを検出する振れ検出手段であって、特定の周波数帯域のうちの低周波数帯域の振れを検出する第1の検出手段と特定の周波数帯域のうち低周波帯域よりも高い周波数帯域の振れを検出する第2の検出手段とを有する。
【0039】
本実施形態では、手持ち撮影を想定してパンニング検出感度を高低の2段階としているが、厳密に手持ち撮影を想定したパンニング検出感度と、高速移動時のパンニング検出感度は同じにする必要は無い。高速移動時のパンニング検出が出来る範囲内で違う閾値のパンニング検出感度を設けても構わない。
【0040】
図7は第1の実施形態を適用した時の動作を説明するタイムチャート図である。横軸は時間、縦軸は検出速度である。時間T0からパンニング検出感度が低の像ブレ補正状態で撮影していたものとする。撮影者はそろそろ発車しそうなので時間T1で一時的にパンニング検出感度を高にする一時的パンニング検出感度高ボタン(不図示)を押したので、時間T1からパンニング検出感度は高に切り替わる。
【0041】
時間T2で停止から加速に変化した時にはパンニング検出感度は高になっているので、パンニング制御が働き、カメラの光軸は不必要に補正されず、不自然な画角ふらつきが発生しない。時間T3からは20km/h以上の速度が検出されているので、パンニング検出感度は高で維持される。
【0042】
時間T4、T5、T6、T7、T8、T9のように加速度変動が発生してもパンニング検出感度は高になっているので、パンニング制御が働き、カメラの光軸は不必要に補正されずに撮影方向を向いているので不自然な画角ふらつきが発生しない。
【0043】
操作部(不図示)からメニュー設定をホールドモードに設定しておくと時間T10で20km/h以下が検出されても、パンニング検出感度は高でホールド(継続)される。時間T11のように減速から停止の瞬間に加速度変動が発生しても、所定時間はパンニング検出感度が高にホールドされているので、カメラの光軸は不必要に補正されずに撮影方向を向いているので、不自然な画角ふらつきが発生しない。
【0044】
時間T12 からは自動的に元々の設定であるパンニング検出感度が低の状態に切り替わり、歩きながらの撮影のようなカメラの大きい振れを補正する像ブレ補正に戻る。
【0045】
以上のように、本実施形態では、一時的パンニング検出感度高ボタンの操作、あるいは20km/h以上の速度の移動を検出した場合に、パンニング検出感度が低であっても高に切り換わる。すなわち、振れ検出手段で検出された撮像装置の振れに対する駆動手段による補正ユニットのヨーイング方向の駆動の応答性が振れ補正時の応答性に比べて小さくなるように駆動手段を制御する駆動制御手段を備える。これにより、カメラの光軸は不必要に補正されずに不自然な画角ふらつきが発生しないという効果がある。
【0046】
なお、第1の実施形態は、振れ補正手段として光学補正の例を記述しているが、本実施形態の主眼は補正量の算出にあるので、公知の画像切り出し式の振れ補正方式でも実施可能である。振れ補正方法は画像処理によるものであっても問題ないことは、後述の説明から明らかである。
【0047】
(第2の実施形態)
図8は本発明の第2の実施形態に係わる撮像装置のブロック図である。第1の実施形態と同じ番号は同じ構成なので説明は省略する。
【0048】
GPS受信部803はGPS衛星からの電波を捕捉するGPS受信アンテナを備え、このGPS受信アンテナを通じてGPS衛星からのGPS信号を受信して現在位置を測位し、CPU104に位置情報を出力する。CPU104にて、測位変化と経過時間から速度を求めることができるのは公知なので詳細な説明は省略する。
【0049】
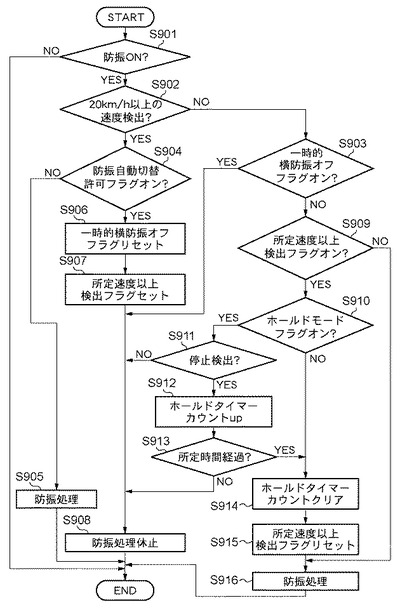
図9は、CPU104にて一定周期で実行される横方向即ちヨーイング方向の像ブレ補正制御プログラムのフローチャートである。
【0050】
S901において像ブレ補正がONであるかどうかを判断し、像ブレ補正がONでないなら処理を終了し、像ブレ補正ONであるならS902へ処理を移す。S902において20km/h以上の速度を検出したかどうかを判断し、検出しないならS903へ処理を移し、検出したならS904へ処理を移す。
【0051】
S903において一時的横像ブレ補正オフフラグがオンかどうかを判断し、フラグオンを検出しないならS909へ処理を移し、検出したならS908へ処理を移す。一時的横像ブレ補正オフフラグは、CPU104のボタン操作検出プログラム内でユーザー意思による一時的横像ブレ補正オフボタン(不図示)の操作を検出した時点でオンにされている。一時的横像ブレ補正オフボタンは現在の像ブレ補正の動作状態にかかわらず強制的に横像ブレ補正オフにしたい時に使うボタンである。例えば、発進時、停止時など所定速度以下でも、加速変動の発生が見込まれる時に使う。
【0052】
S904において、20km/h以上の速度を検出した場合での横像ブレ補正オフへの像ブレ補正自動切換許可フラグがオンかどうかを判断し、オンならS906へ処理を移し、オフならS905へ処理を移す。横像ブレ補正オフへの像ブレ補正自動切換許可フラグは、CPU104のボタン操作検出プログラム内でユーザー意思による像ブレ補正自動切換許可(可否)を選択する操作(選択可能)を検出した時点でオンにされている。
【0053】
S905において、ジャイロ検出処理を行って補正量を求め、補正ユニット100を位置制御して処理を終わる。
【0054】
S906において、20km/h以上の速度を検出している時点で横方向の像ブレ補正処理が休止になるので、一時的横方向の像ブレ補正オフフラグをリセットしてS907へ処理を移す。S907において、20km/h以上の速度を検出したので、所定速度以上検出フラグをセットしてS908へ処理を移す。
【0055】
S908において、像ブレ補正処理休止に入り、休止なのでジャイロ検出処理を行わず補正量を中心固定として、補正ユニット100を位置制御して処理を終わる。
【0056】
S909において所定速度以上検出フラグがオンかどうかを判断し、フラグオンを検出しないならS916へ処理を移し、検出したならS910へ処理を移す。
【0057】
S910においてホールドモードフラグがオンかどうかを判断し、フラグオンを検出しないならS914へ処理を移し、検出したならS911へ処理を移す。ホールドモードフラグは、CPU104のメニュー設定プログラム内でユーザー意思によるホールドモードを選択された時点でオンにされている。ホールドモードは、一度20km/h以上になったら、必ず止る時に加速度変動が起きるであろうから、その後20km/h以下になって更に停止しても暫くの間、横方向の像ブレ補正オフでホールド動作してほしい時に選択するモードである。停止時に手動で一時的横方向の像ブレ補正オフボタンを操作するなら、ホールドモードを選択する必要は無い。
【0058】
S911において停止を検出したかどうかを判断し、停止を検出しないならS908へ処理を移し、停止を検出したならS912へ処理を移す。S912において、停止後も所定時間だけ横方向の像ブレ補正オフで維持するためのホールドタイマーをカウントアップしてS913へ処理を移す。S913において所定時間経過したかどうかを判断し、経過していないならS908へ処理を移し、経過したならS914へ処理を移す。
【0059】
S914において、ホールドタイマーをカウントクリアしてS915へ処理を移す。S915において、所定速度以上検出フラグをリセットしてS916へ処理を移す。S916において、像ブレ補正処理に入り、ジャイロ検出処理を行って補正量を求め、補正ユニット100を位置制御して処理を終わる。
【0060】
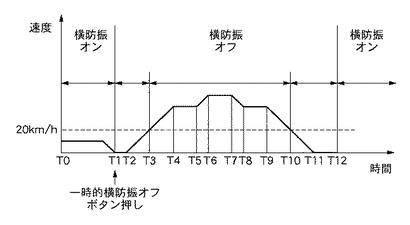
図10は第2の実施形態を適用した時の動作を説明するタイムチャート図である。横軸は時間、縦軸は検出速度である。時間T0から縦方向の像ブレ補正オン、横方向の像ブレ補正オンで撮影していたものとする。
【0061】
撮影者はそろそろ発車しそうなので時間T1で一時的に横方向の像ブレ補正をオフにする一時的横方向の像ブレ補正オフボタン(不図示)を押したので、時間T1から横方向の像ブレ補正はオフに切り替わる。時間T2で停止から加速に変化した時には横方向は横方向の像ブレ補正オフでCPU104が行う補正ユニット100の位置制御は中心固定になっているので、カメラの光軸は動かず、不自然な画角ふらつきが発生しない。
【0062】
時間T3からは20km/h以上の速度が検出されているので、横方向は横方向の像ブレ補正オフで維持される。時間T4、T5、T6、T7、T8、T9のように加速度変動が発生しても横方向は横方向の像ブレ補正オフで中心固定に位置制御されており、カメラの光軸は動かずに撮影方向を向き続けるので不自然な画角ふらつきが発生しない。
【0063】
操作部(不図示)からメニュー設定をホールドモードに設定しておくと時間T10で20km/h以下が検出されても、横方向は横方向の像ブレ補正オフでホールドされる。時間T11のように減速から停止の瞬間に加速度変動が発生しても、所定時間だけ横方向は横方向の像ブレ補正オフにホールドされて、カメラの光軸は動かないので、不自然な画角ふらつきが発生しない。
【0064】
時間T12 からは自動的に元々の設定である横方向の横方向の像ブレ補正オンに切り替わり、歩きながらの撮影のようなカメラの大きい振れを補正する像ブレ補正に戻る。
【0065】
以上のように、一時的横方向の像ブレ補正オフボタンの操作、あるいは20km/h以上の速度の移動を検出した場合に、横方向の像ブレ補正がオンであっても横方向の像ブレ補正オフに切り換わることで、カメラの光軸は固定で動かず不自然な画角ふらつきが発生しないという効果がある。
【特許請求の範囲】
【請求項1】
撮像光学系の光軸に垂直な方向に移動することにより、前記撮像光学系により結像される被写体像のぶれを補正する補正ユニットと、
前記撮像光学系によって結像される被写体像を撮像する撮像素子と、
撮像装置の振れを検出する振れ検出手段と、
振れ補正時には、前記振れ検出手段で検出した振れに基づいて、前記被写体像のぶれを補正するように前記補正ユニットを駆動する駆動手段と、
前記撮像装置の少なくとも光軸方向の速度を検出する速度検出手段と、
前記速度検出手段によって所定速度以上の速度が検出されたとき、前記振れ検出手段で検出された前記撮像装置の振れに対する前記駆動手段による前記補正ユニットのヨーイング方向の駆動の応答性が前記振れ補正時の応答性に比べて小さくなるように前記駆動手段を制御する駆動制御手段と、
を備えることを特徴とする撮像装置。
【請求項2】
撮像光学系の光軸に垂直な方向に移動することにより、前記撮像光学系により結像される被写体像のぶれを補正する補正ユニットと、
前記撮像光学系によって結像される被写体像を撮像する撮像素子と、
撮像装置の特定の周波数帯域を含む振れを検出する振れ検出手段であって、前記特定の周波数帯域のうちの低周波数帯域の振れを検出する第1の検出手段と前記特定の周波数帯域のうち前記低周波帯域よりも高い周波数帯域の振れを検出する第2の検出手段とを有する振れ検出手段と、
振れ補正時には、前記振れ検出手段で検出した振れに基づいて、前記被写体像のぶれを補正するように前記補正ユニットを駆動する駆動手段と、
前記撮像装置に加わる速度を検出する速度検出手段と、
前記速度検出手段によって所定速度以上の速度が検出されたとき、前記第1の検出手段で検出された振れに対する前記駆動手段による前記補正ユニットのヨーイング方向の駆動の応答性が前記振れ補正時の応答性に比べて小さくなるように前記駆動手段を制御する駆動制御手段と、
を備えることを特徴とする撮像装置。
【請求項3】
前記駆動制御手段は、前記速度検出手段が前記所定速度以下の速度を検出している間も、一時的に、前記検出された振れに対する前記駆動手段による前記補正ユニットのヨーイング方向の駆動の応答性が前記振れ補正時の応答性に比べて小さくなるように前記駆動手段を制御する状態に切換え可能であることを特徴とする請求項1または2に記載の撮像装置。
【請求項4】
前記駆動制御手段は、前記速度検出手段が前記所定速度以上の速度を検出した場合、その後に前記所定速度以下の速度を検出しても、前記検出された振れに対する前記駆動手段による前記補正ユニットのヨーイング方向の駆動の応答性が前記振れ補正時の応答性に比べて小さくなるように制御する状態を継続するように切換え可能であることを特徴とする請求項1または2に記載の撮像装置。
【請求項5】
前記駆動制御手段は、前記速度検出手段が前記所定速度以上の移動速度を検出したときに前記検出された振れに対する前記駆動手段による前記補正ユニットのヨーイング方向の駆動の応答性が前記振れ補正時の応答性に比べて小さくなるように制御する状態への自動切換えの可否が選択可能であることを特徴とする請求項1または2に記載の撮像装置。
【請求項6】
前記速度検出手段は、少なくとも光軸方向の加速度センサと、光軸と水平に直交する方向の加速度センサとから、進行方向の速度を算出することを特徴とする請求項1または2に記載の撮像装置。
【請求項7】
前記速度検出手段は、GPS衛星からの電波を捕捉するGPS受信アンテナを備え、該GPS受信アンテナを通じて前記GPS衛星からのGPS信号を受信して測位することで、前記撮像装置の進行方向の速度を算出することを特徴とする請求項1または2に記載の撮像装置。
【請求項1】
撮像光学系の光軸に垂直な方向に移動することにより、前記撮像光学系により結像される被写体像のぶれを補正する補正ユニットと、
前記撮像光学系によって結像される被写体像を撮像する撮像素子と、
撮像装置の振れを検出する振れ検出手段と、
振れ補正時には、前記振れ検出手段で検出した振れに基づいて、前記被写体像のぶれを補正するように前記補正ユニットを駆動する駆動手段と、
前記撮像装置の少なくとも光軸方向の速度を検出する速度検出手段と、
前記速度検出手段によって所定速度以上の速度が検出されたとき、前記振れ検出手段で検出された前記撮像装置の振れに対する前記駆動手段による前記補正ユニットのヨーイング方向の駆動の応答性が前記振れ補正時の応答性に比べて小さくなるように前記駆動手段を制御する駆動制御手段と、
を備えることを特徴とする撮像装置。
【請求項2】
撮像光学系の光軸に垂直な方向に移動することにより、前記撮像光学系により結像される被写体像のぶれを補正する補正ユニットと、
前記撮像光学系によって結像される被写体像を撮像する撮像素子と、
撮像装置の特定の周波数帯域を含む振れを検出する振れ検出手段であって、前記特定の周波数帯域のうちの低周波数帯域の振れを検出する第1の検出手段と前記特定の周波数帯域のうち前記低周波帯域よりも高い周波数帯域の振れを検出する第2の検出手段とを有する振れ検出手段と、
振れ補正時には、前記振れ検出手段で検出した振れに基づいて、前記被写体像のぶれを補正するように前記補正ユニットを駆動する駆動手段と、
前記撮像装置に加わる速度を検出する速度検出手段と、
前記速度検出手段によって所定速度以上の速度が検出されたとき、前記第1の検出手段で検出された振れに対する前記駆動手段による前記補正ユニットのヨーイング方向の駆動の応答性が前記振れ補正時の応答性に比べて小さくなるように前記駆動手段を制御する駆動制御手段と、
を備えることを特徴とする撮像装置。
【請求項3】
前記駆動制御手段は、前記速度検出手段が前記所定速度以下の速度を検出している間も、一時的に、前記検出された振れに対する前記駆動手段による前記補正ユニットのヨーイング方向の駆動の応答性が前記振れ補正時の応答性に比べて小さくなるように前記駆動手段を制御する状態に切換え可能であることを特徴とする請求項1または2に記載の撮像装置。
【請求項4】
前記駆動制御手段は、前記速度検出手段が前記所定速度以上の速度を検出した場合、その後に前記所定速度以下の速度を検出しても、前記検出された振れに対する前記駆動手段による前記補正ユニットのヨーイング方向の駆動の応答性が前記振れ補正時の応答性に比べて小さくなるように制御する状態を継続するように切換え可能であることを特徴とする請求項1または2に記載の撮像装置。
【請求項5】
前記駆動制御手段は、前記速度検出手段が前記所定速度以上の移動速度を検出したときに前記検出された振れに対する前記駆動手段による前記補正ユニットのヨーイング方向の駆動の応答性が前記振れ補正時の応答性に比べて小さくなるように制御する状態への自動切換えの可否が選択可能であることを特徴とする請求項1または2に記載の撮像装置。
【請求項6】
前記速度検出手段は、少なくとも光軸方向の加速度センサと、光軸と水平に直交する方向の加速度センサとから、進行方向の速度を算出することを特徴とする請求項1または2に記載の撮像装置。
【請求項7】
前記速度検出手段は、GPS衛星からの電波を捕捉するGPS受信アンテナを備え、該GPS受信アンテナを通じて前記GPS衛星からのGPS信号を受信して測位することで、前記撮像装置の進行方向の速度を算出することを特徴とする請求項1または2に記載の撮像装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−189827(P2012−189827A)
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2011−53555(P2011−53555)
【出願日】平成23年3月10日(2011.3.10)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願日】平成23年3月10日(2011.3.10)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]