
撮像装置
【課題】被駆動部材の高速駆動及び被駆動部材の停止位置精度の向上を可能にし、被駆動部材の駆動音も小さくできる撮像装置を提供する。
【解決手段】撮像装置は、絞り羽根を開閉させる被駆動部材を駆動するモータのロータ位置を検出するセンサと、検出結果に従ってコイルへの通電方向を切り替えてモータを駆動する第1駆動手段と、入力された駆動パルス間隔に従ってコイルへの通電方向を切り替えてモータを駆動する第2駆動手段と、駆動手段の切替回路と、起動時に被駆動部材を待機位置から撮影開始初期位置まで動作させる際、第2駆動手段でモータを駆動後、第1駆動手段でモータを駆動し、再び第2駆動手段でモータを駆動/停止させるように切替回路を制御し、表示部への画像表示中及び撮影中は、第2駆動手段のみで駆動するように切替回路を制御する制御手段と、を備える。
【解決手段】撮像装置は、絞り羽根を開閉させる被駆動部材を駆動するモータのロータ位置を検出するセンサと、検出結果に従ってコイルへの通電方向を切り替えてモータを駆動する第1駆動手段と、入力された駆動パルス間隔に従ってコイルへの通電方向を切り替えてモータを駆動する第2駆動手段と、駆動手段の切替回路と、起動時に被駆動部材を待機位置から撮影開始初期位置まで動作させる際、第2駆動手段でモータを駆動後、第1駆動手段でモータを駆動し、再び第2駆動手段でモータを駆動/停止させるように切替回路を制御し、表示部への画像表示中及び撮影中は、第2駆動手段のみで駆動するように切替回路を制御する制御手段と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えばデジタルカメラ等の撮像装置に関する。
【背景技術】
【0002】
デジタルカメラ等の撮像装置には、撮像素子に結像される被写体光の光量を調節するため、絞りの開口径を制御する光量調節装置(絞り装置)が設けられている。
【0003】
この光量調節装置は、遮光部材としての複数の絞り羽根を備え、ステッピングモータを駆動動力源として絞り羽根の開口径を調整するものが主流となっているが、ステッピングモータは、高速駆動または負荷変動により脱調が起こる可能性がある。このため、モータの駆動速度を制限したり、負荷トルクに安全率を見込む必要があり、低効率で駆動することになってしまう。
【0004】
また、静止画撮影時におけるシャッタタイムラグの短縮化の要請により、ステッピングモータを目標位置まで高速度で駆動することで、絞り羽根の駆動に要する時間を短縮することが望まれている。
【0005】
ステッピングモータを用いて絞り羽根を高速で駆動するには、ステップ幅の大きいモータを用いるか、動力伝達機構の減速比を低くすることが考えられるが、この場合、モータの高分解能を得ることが困難となり、絞り口径の精度が悪化する。
【0006】
また、ステッピングモータのサイズを大型化することなく、絞り羽根を高速で駆動するには、モータに通電する電圧値或いは電流値を高めることが考えられるが、この場合は電源となる電池の消耗が激しくなる。すなわち、ステッピングモータを駆動動力源とした光量調節装置では、絞り羽根の高速駆動と停止位置の高精度化との両立は難しい。
【0007】
一方、静止画及び動画を撮影可能なデジタルカメラでは、速写性を重視して光量調節装置を高速駆動するため、光量調節装置の駆動音が大きくなり、この駆動音が動画撮影時にノイズとして記録されてしまう問題が生じていた。
【0008】
そこで、撮影モードに応じて、被駆動部材を駆動するアクチュエータの速度上限及び加減速特性の少なくとも一方を変更制御する技術が提案されている(特許文献1)。具体的には、静止画撮影モードでは、アクチュエータの駆動モードが非静音モードとなり、動画撮影モードでは、アクチュエータの駆動モードが静音モードとなるように、アクチュエータの速度上限及び加減速特性の少なくとも一方を変更制御する。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2007−6305号号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかし、上記特許文献1では、動画撮影モード時にアクチュエータの駆動モードが静音モードとなるように、アクチュエータの速度上限が低く設定されたり、緩やかな加減速特性に設定されたりする。したがって、被駆動部材の駆動音は小さくなるものの、被駆動部材の駆動に要する時間は増えてしまう。
【0011】
そこで、本発明は、被駆動部材の高速駆動を可能にすることができると共に、被駆動部材の停止位置精度を向上させることができ、更には、被駆動部材の駆動音も小さくすることができる撮像装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
上記目的を達成するために、本発明の撮像装置は、被駆動部材を駆動するモータと、前記モータのロータの回転位置を検出する検出手段と、前記ロータ位置検出手段による検出結果に従って前記モータのコイルへの通電方向を切り替えて前記モータを駆動する第1の駆動手段と、入力された駆動パルス間隔に従って前記モータのコイルへの通電方向を切り替えて前記モータを駆動する第2の駆動手段と、前記第1の駆動手段と前記第2の駆動手段とを切り替える切替手段と、装置の起動時に前記被駆動部材を待機位置から撮影開始初期位置まで動作させる場合は、前記モータを前記第2の駆動手段で駆動を開始し、前記第1の駆動手段で駆動した後、再び前記第2の駆動手段で駆動して停止させるように前記切替手段を制御し、被写体の画像を表示部に表示している場合、及び被写体を撮影している場合は、前記第2の駆動手段のみで前記モータを駆動するように前記切替手段を制御する制御手段と、を備えることを特徴とする。
【発明の効果】
【0013】
本発明によれば、被駆動部材の高速駆動を可能にすることができると共に、被駆動部材の停止位置精度を向上させることができ、更には、被駆動部材の駆動音も小さくすることができる。
【図面の簡単な説明】
【0014】
【図1】本発明の撮像装置の実施形態の一例であるデジタルカメラに設けられる絞り装置の分解斜視図である。
【図2】モータの構成例について説明するための斜視図である。
【図3】デジタルカメラの制御系を説明するためのブロック図である。
【図4】ステータとロータとロータ位置検出センサとの位相関係を説明するための断面図である。
【図5】フィードバック通電切替モードの動作を説明するためのモータの断面図である。
【図6】(a)はロータの回転角度とモータトルクとの関係を示すグラフ図、(b)はロータの回転角度とロータ位置検出センサの出力との関係を示すグラフ図である。
【図7】第1の駆動制御モードにおけるロータの回転速度とモータの駆動ステップ数との関係を示すグラフ図である。
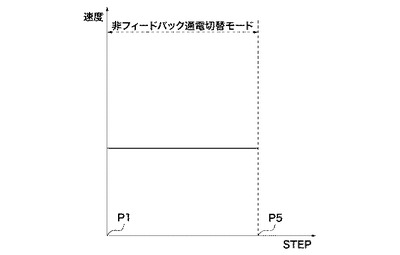
【図8】第2の駆動制御モードにおけるロータの回転速度とモータの駆動ステップ数との関係を示すグラフ図である。
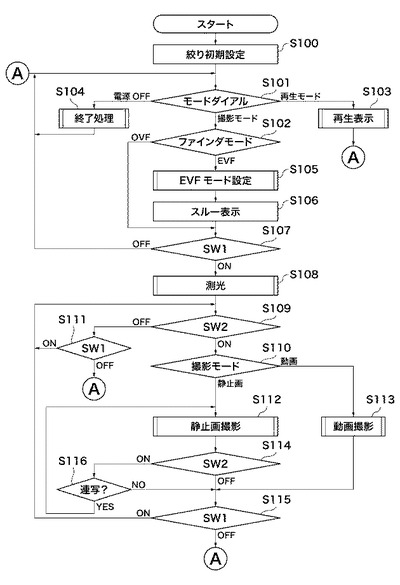
【図9】デジタルカメラの動作例を説明するためのフローチャート図である。
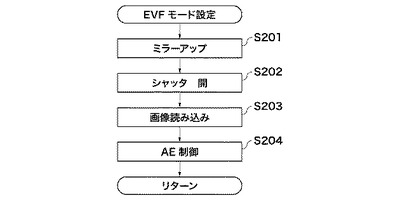
【図10】図9のステップS105におけるEVFモード設定処理を説明するためのフローチャート図である。
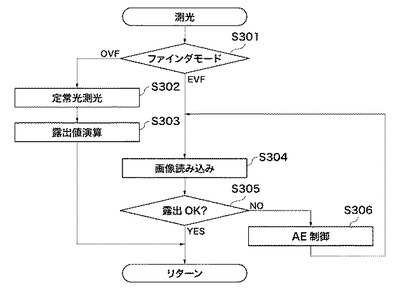
【図11】図9のステップS108における測光処理を説明するためのフローチャート図である。
【図12】図9のステップS112における静止画撮影処理を説明するためのフローチャート図である。
【図13】図9のステップS113における動画撮影処理を説明するためのフローチャート図である。
【図14】図9のステップS104における終了処理を説明するためのフローチャート図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施形態の一例を図面を参照して説明する。
【0016】
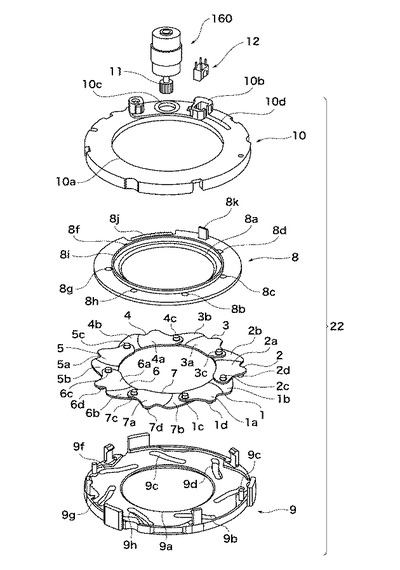
図1は、本発明の撮像装置の実施形態の一例であるデジタルカメラに設けられる絞り装置の分解斜視図である。
【0017】
図1に示す絞り装置22は、遮光部材としての複数の絞り羽根1〜7、回転部材8、カム部材9、及び押え部材10を備える。
【0018】
絞り羽根1〜7は、合成樹脂等の薄板状の成形品とされ、遮光性を有して開口量を規制する第1基部1a〜7a及び第2基部1b〜7bを有する。第1基部1a〜7aの一方の面には第1軸部1c〜7cが設けられ、第1基部1a〜7aの他方の面には、第2軸部1d〜7d(一部不図示)が設けられる。
【0019】
回転部材8は、絞り羽根1〜7を開閉動作させるためのリング状の部材であり、中央部に設けられた開口部8aの周囲には、突起部8iが設けられ、突起部8iの径方向外側には、穴部8b〜8h、ギア部8j、及び遮光部8kが設けられる。穴部8b〜8hは、回転部材8の一方の面に周方向に所定の間隔で配置され、ギア部8j及び遮光部8kは、穴部8fと穴部8dとの間に配置される。ここで、回転部材8は、本発明の被駆動部材の一例に相当する。
【0020】
カム部材9は、リング状に形成されており、中央部に設けられた開口部9aの周囲には、複数のカム溝9b〜9hが周方向に略等間隔で設けられている。
【0021】
押え部材10は、リング状に形成されており、中央部に設けられた開口部10aの周囲には、センサ取付部10b及びモータ取付穴10cが周方向に隣接して設けられている。また、押え部材10には、回転部材8の遮光部8kが挿入される円弧状の穴10dがセンサ取付部10bに連通して設けられている。そして、センサ取付部10bには、待機位置検出センサ12が取り付けられ、モータ取付穴10cには、モータ160が取り付けられる。
【0022】
モータ160は、回転部材8を回転駆動するためのものであり、モータ取付穴10cに取り付けられた状態では、モータ軸に固定されたピニオン11がモータ取付穴10cを挿通して、回転部材8のギア部8jに噛合する。モータ160は、2つのコイル163,164(図2参照)を備える2相のステッピングモータにロータ位置検出センサ171,172(図2参照)を配置して構成される。
【0023】
また、モータ160は、フィードバック通電切替モードと非フィードバック通電切替モードとの2つのモードで駆動可能とされている。フィードバック通電切替モードでは、ロータ位置検出センサ171,172によるロータ位置の検出結果に従ってコイル163,164への通電方向を切り替える。また、非フィードバック通電切替モードでは、決められた時間間隔に従ってコイル163,164への通電方向を切り替える。
【0024】
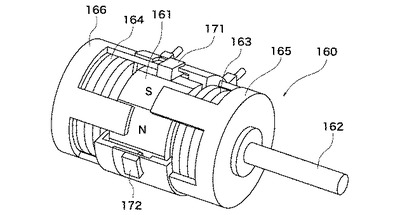
ここで、図2を参照して、モータ160の構成例について詳しく説明する。図2は、モータ160の外観斜視図である。
【0025】
図2に示すように、モータ160は、マグネット161を有するロータ162、コイル163,164、ステータ165,166、及びロータ位置検出センサ171,172を備える。
【0026】
ロータ162は、ステータ165,166に対して回転可能に支持される。ロータ162には、マグネット161が一体に固定されており、マグネット161は、外周が多極着磁された円筒形状の永久磁石とされ、角度位置に対して径方向の磁力の強さが正弦波状に変化する着磁パターンを有する。
【0027】
ステータ165は、コイル163に励磁される4つの磁極歯165a〜165d(図3参照)を有する。磁極歯165a〜165dは、マグネット161の外周面に対して所定の隙間を持って対向配置される。ステータ166は、コイル164に励磁される4つの磁極歯166a〜166d(図3参照)を有する。磁極歯166a〜166dは、マグネット161の外周面に対して所定の隙間を持って対向配置される。
【0028】
ロータ位置検出センサ171,172は、マグネット161の磁束を検出して、電気角で90°ずつ位相のずれた信号をロータの回転位置の検出信号として出力するホールセンサである。ここで、マグネット161の極数をnとすると、電気角360°は実際のロータ角度の720/n°に相当する。
【0029】
図1に戻って、センサ取付部10bに取り付けられた待機位置検出センサ12は、例えば発光部及び受光部を備える光学センサとされている。待機位置検出センサ12は、押え部材10の円弧状の穴10dに挿入された回転部材8の遮光部8kが発光部と受光部との間に挿入された状態か発光部と受光部との間から退避した状態かを検知し、該検知信号を後述する制御回路23に出力する。制御回路23は、待機位置検出センサ12からの検知信号に基づき、回転部材8が待機位置にあるか否かを判断する。
【0030】
そして、押え部材10は、回転部材8及び絞り羽根1〜7を間に挟んでカム部材9に固定され、これにより、回転部材8及び絞り羽根1〜7の光軸方向の抜け止めがなされる。その際、回転部材8の突起部8iは、押え部材10の開口部10aに嵌合されて回転可能に支持される。また、絞り羽根1〜7の第1軸部1c〜7cは、回転部材8の穴部8b〜8hにそれぞれ回動可能に嵌合され、第2軸部1d〜7dは、カム部材9のカム溝9b〜9hにそれぞれ摺動可能に嵌合される。
【0031】
絞り羽根1〜7は、光軸を中心に円周方向に均等配置されて、第1基部1a〜7a及び第2基部1b〜7bが重ね合わされることで絞り開口を制御可能となり、重ね合わせが大きいほど絞り開口量は小さくなる。
【0032】
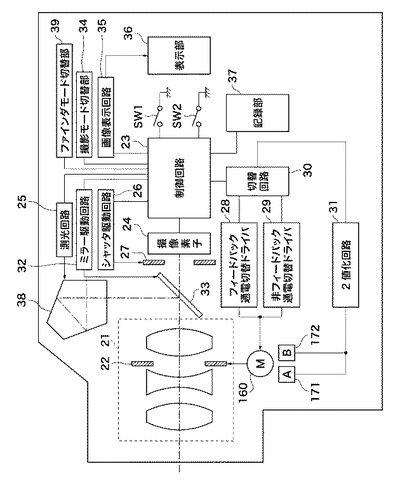
図3は、本実施形態のデジタルカメラの制御系を説明するためのブロック図である。
【0033】
図3において、制御回路23は、ROM、RAM及びCPU等を含み、デジタルカメラ全体の制御を司る。撮像素子24は、CCDセンサやCMOSセンサ等で構成され、撮影レンズ21を通って入射した被写体光を光電変換して制御回路23に出力する。制御回路23は、撮像素子24からの出力信号を増幅してデジタル映像信号として出力する。なお、撮影レンズ21には、上述した絞り装置22が組み込まれている。
【0034】
測光回路25は、撮影レンズ21、ミラー33及び光学ファインダ38を介して入射した被写体光を測光センサにより検出して検出信号を制御回路23に出力し、制御回路23は、最適なシャッタ速度と絞り値を算出する。シャッタ駆動回路26は、上記で算出されたシャッタ速度に従ってシャッタ装置27を駆動する。2値化回路31は、ロータ位置検出センサ171,172の出力信号を2値化して出力する。
【0035】
フィードバック通電切替ドライバ28、非フィードバック通電切替ドライバ29、及び切替回路30は、絞り装置22を駆動するモータ160の駆動回路を構成する。ここで、フィードバック通電切替ドライバ28は、本発明の第1の駆動手段の一例に相当し、非フィードバック通電切替ドライバ29は、本発明の第2の駆動手段の一例に相当する。
【0036】
フィードバック通電切替ドライバ28は、制御回路23で算出された絞り値に基づきモータ160を駆動する。その際、フィードバック通電切替ドライバ28は、ロータ位置検出センサ171,172から2値化回路31を介して出力されたロータ位置の検出信号に従ってコイルへの通電方向を切り換える。
【0037】
非フィードバック通電切替ドライバ29は、制御回路23で算出された絞り値に基づきモータ160を駆動する。その際、入力された駆動パルス間隔(駆動周波数)に従ってコイルへの通電方向を切り替える。この駆動方式は、通常の2相ステップモータの駆動方式と同様である。
【0038】
切替回路30は、モータ160を駆動する際に、フィードバック通電切替ドライバ28で駆動するか、非フィードバック通電切替ドライバ29で駆動するかを切り替える回路である。フィードバック通電切替ドライバ28、非フィードバック通電切替ドライバ29、及び切替回路30の詳細については、後述する。
【0039】
ミラー駆動回路32は、光学ファインダ38の観察状態ではミラー33を撮影光路内に配置し、撮影状態及び表示部36にリアルタイム画像を表示する電子ファインダ観察状態ではミラー33を撮影光路外に退避させる。
【0040】
撮影モード切替部34は、モードダイアルスイッチ等の操作により、静止画を撮影するモードと動画を撮影するモードとを切り替えて選択する。画像表示回路35は、制御回路23から出力されたデジタル映像信号を液晶表示装置等の表示部36に表示する。記録部37は、メモリーカード等の記録媒体に撮影画像を記録する。
【0041】
ファインダモード切替部39は、スイッチ等の操作により、被写体像を光学ファインダ38で観察する光学ファインダモード(OVFモード)と被写体像を表示部36に表示する電子ファインダモード(EVFモード)とに切り替える。
【0042】
次に、非フィードバック通電切替モードについて説明する。
【0043】
モータ160は、非フィードバック通電切替ドライバ29により非フィードバック通電切替駆動を行うことができる。すなわち、非フィードバック通電切替ドライバ29は、入力された駆動パルス間隔(駆動周波数)とロータの回転方向に従って、コイル163とコイル164への通電を順次切り替えることで、ロータ162を所望の速度で回転させることが可能である。また、非フィードバック通電切替ドライバ29は、入力された駆動パルス数に従って、ロータ162を所望の角度だけ回転させることが可能である。
【0044】
非フィードバック通電切替モードは、入力される駆動パルス間隔によって正確な速度制御が可能であり、また、低速でも安定した駆動が可能である。さらに、非フィードバック通電切替モードは、マイクロステップ駆動によって1ステップの中を分割して位置決めすることができるため、分解能が高く、微小変位の制御性が高い。
【0045】
一方、非フィードバック通電切替モードは、駆動パルス間隔を小さく(駆動周波数を大きく)すると、コイル通電の切り替えに対してロータが応答できなくなり、脱調をおこす可能性がある。このため、駆動パルス間隔に下限を設定するとともに、実際の負荷に対して所定の安全率を見込む必要があり、高速度での駆動が制限される。
【0046】
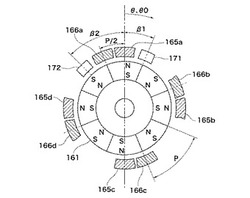
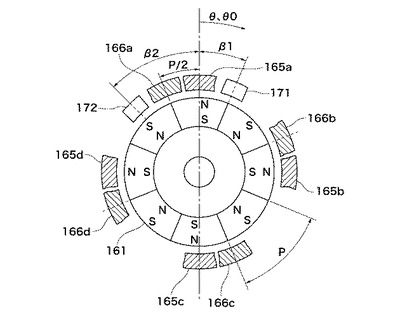
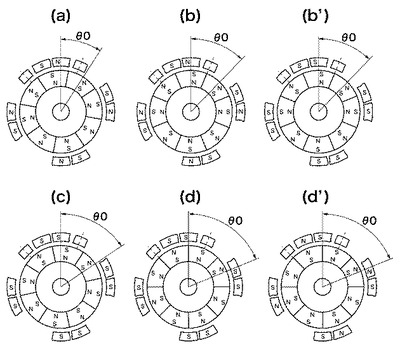
次に、図4〜図6を参照して、フィードバック通電切替モードについて説明する。図4はモータ160におけるステータ165,166とロータ162とロータ位置検出センサ171,172との位相関係を説明するための断面図、図5はフィードバック通電切替モードの動作を説明するためのモータ160の断面図である。
【0047】
モータ160は、ロータ位置検出センサ171,172から出力される信号によりコイルへの通電を切り替えるフィードバック通電切替モードによって回転することができる。
【0048】
ここで、本実施形態では、マグネット161の極数を8極、着磁角Pを45°とする。また、ステータ165を基準として、ステータ166の位相P/2を−22.5°、ロータ位置検出センサ171の位相β1を+22.5°、ロータ位置検出センサ172の位相β2を−45°とする。
【0049】
以下の説明では、電気角を用いてフィードバック通電切替モードの動作を説明する。電気角とは、マグネット161の磁力の1周期を360°として表したものであり、マグネット161の極数をM、実際の角度をθ0とすると、電気角θは、θ=(θ0×M/2)で表すことができる。
【0050】
ステータ165とステータ166の位相差、ロータ位置検出センサ171とロータ位置検出センサ172との位相差、ステータ165とロータ位置検出センサ171との位相差は、全て電気角で90°である。なお、図4においては、ステータ165の磁極歯165a〜165dの中心とマグネット161のN極中心が径方向に対向して配置されており、この状態をロータ162の初期状態とし、電気角0°とする。
【0051】
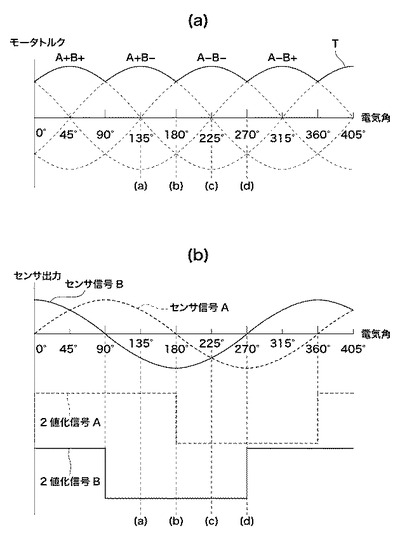
図6(a)は、ロータ162の回転角度とモータトルクとの関係を示すグラフ図であり、横軸は電気角、縦軸はモータトルクを示す。モータトルクは、ロータ162を時計回り方向(正方向)に回転させるトルクを正とする。
【0052】
コイル163に正方向の電流を通電すると、ステータ165がN極に磁化し、マグネット161の磁極との間に電磁気力が発生する。また、コイル164に正方向の電流を通電すると、ステータ166がN極に磁化し、マグネット161の磁極との間に電磁気力が発生する。2つの電磁気力を合成すると、ロータ162の回転に伴って略正弦波状のトルクが得られる(トルク曲線A+B+)。
【0053】
なお、他の通電状態においても、同様に、略正弦波状のトルクが得られる(トルク曲線A+B−、A−B−、A−B+)。また、ステータ165は、ステータ166に対して電気角で90°の位相差で配置されるため、4つのトルクは互いに電気角で90°の位相差を持っている。
【0054】
図6(b)は、ロータ162の回転角度とロータ位置検出センサ171,172の出力との関係を示すグラフ図であり、横軸は電気角、縦軸はロータ位置検出センサ171,172の出力を示す。また、ロータ位置検出センサ171の出力をセンサ信号Aとし、ロータ位置検出センサ172の出力をセンサ信号Bとする。
【0055】
マグネット161の径方向の磁力の強さは、電気角に対して略正弦波状になるため、ロータ位置検出センサ171からは略正弦波状の信号が出力される(センサ信号A)。なお、本実施形態では、ロータ位置検出センサ171は、マグネット161のN極と対向するときに正の値を出力する。
【0056】
一方、ロータ位置検出センサ172は、ロータ位置検出センサ171に対して電気角で90°の位相差をもって配置されるため、ロータ位置検出センサ172からは余弦波状の信号が出力される(センサ信号B)。なお、本実施形態では、ロータ位置検出センサ172は、ロータ位置検出センサ171に対して極性を反転しているため、マグネット161のS極と対向するときに正の値を出力する。
【0057】
センサ信号A及びセンサ信号Bに対して2値化回路31で2値化処理を行った信号が、2値化信号A及び2値化信号Bとなる。フィードバック通電切替モードでは、2値化信号Aを基にコイル163への通電方向を切り替え、2値化信号Bを基にコイル164への通電方向を切り替える。
【0058】
すなわち、フィードバック通電切替モードでは、2値化信号Aが正の値を示すとき、コイル163に正方向の電流を流し、2値化信号Aが負の値を示すとき、コイル163に逆方向の電流を流す。また、フィードバック通電切替モードでは、2値化信号Bが正の値を示すとき、コイル164に正方向の電流を流し、2値化信号Bが負の値を示すとき、コイル164に逆方向の電流を流す。
【0059】
次に、図5及び図6を参照して、フィードバック通電切替モードの動作例を説明する。
【0060】
図5(a)は、ロータ162が電気角で135°回転した状態を示している。このときの各センサ信号A,Bは、図6(b)の(a)で示した値を示しており、2値化信号Aは正の値、2値化信号Bは負の値となる。
【0061】
従って、コイル163には正方向の電流が流れてステータ165はN極に磁化し、コイル164には逆方向の電流が流れてステータ166はS極に磁化する。このとき、図6(a)のトルク曲線A+B−に対応する時計回り方向のトルクが発生し、ロータ162はθ方向の回転力を受けて回転する。
【0062】
図5(b)は、ロータ162が電気角で180°回転した状態を示している。この状態では、ロータ位置検出センサ171は、マグネット161のN極とS極との境界に位置するため、電気角180°を境に2値化信号Aは正の値から負の値に切り替わり、コイル163への通電方向が正方向から逆方向へ切り替わる。このときの電気角は、図6(a)のトルク曲線A+B−とトルク曲線A−B−との交点の電気角と一致する。
【0063】
図5(b′)は、ロータ162が電気角で180°回転し、コイル163の通電方向が切り換わった状態を示している。この状態では、コイル163には逆方向の電流が流れてステータ165はS極に磁化し、コイル164には逆方向の電流が流れてステータ166はS極に磁化する。このとき、図6(a)のトルク曲線A−B−に対応する時計回り方向のトルクが発生し、ロータ162はθ方向の回転力を受けて回転する。
【0064】
図5(c)は、ロータ162が電気角で225°回転した状態を示している。この状態では、各センサ信号A,Bは、図6(b)の(c)の値を示しており、2値化信号Aは負の値、2値化信号Bは負の値となる。
【0065】
従って、コイル163には逆方向の電流が流れてステータ165はS極に磁化し、コイル164には逆方向の電流が流れてステータ166はS極に磁化する。このとき、図6(a)のトルク曲線A−B−に対応する時計回り方向のトルクが発生し、ロータ162はθ方向の回転力を受けて回転する。
【0066】
図5(d)は、ロータ162が電気角で270°回転した状態を示している。この状態では、ロータ位置検出センサ172は、マグネット161のN極とS極の境界に位置するため、電気角270°を境に2値化信号Bは負の値から正の値に切り替わり、コイル164への通電方向が逆方向から正方向へ切り替わる。このときの電気角は、図6(a)のトルク曲線A−B−とトルク曲線A−B+との交点の電気角と一致する。
【0067】
図5(d′)は、ロータ162が電気角で270°回転し、コイル164の通電方向が切り替わった状態を示している。この状態では、コイル164には正方向の電流が流れてステータ166はN極に磁化し、コイル163には逆方向の電流が流れてステータ165はS極に磁化する。このとき、図6(a)のトルク曲線A−B+に対応する時計回り方向のトルクが発生し、ロータ162はθ方向の回転力を受けて回転する。
【0068】
以上の動作を繰り返すことで、ロータ162を連続的に回転させることが可能となる。また、2値化信号A,Bの正負を反転させれば、逆回転も可能である。
【0069】
フィードバック通電切替モードでは、駆動パルス数と回転方向を入力することで、ロータを所望の角度だけ回転させることが可能である。また、コイルに流す電流を制御することで各ステータの磁極歯とマグネット磁極との間の磁力を変化させてロータに作用する回転力を制御し、ロータを所望の速度で回転させることが可能である。
【0070】
また、フィードバック通電切替モードでは、ロータ位置検出センサの信号の位相を進めることでモータの特性を変化させることが可能である。フィードバック通電切替モードにおいて高速度でロータを回転させると、通電切替の周期が短くなり、コイルのインダクタンスの影響により、通電切替の周期に比べて電流値の立ち上がりが遅くなる。このため、モータトルクが低くなるが、ロータ位置検出センサの信号の位相を進めることで、電流値の立ち上がりが遅くなるのを防ぎ、高速でのトルク低下を抑えることが可能である。
【0071】
なお、本実施形態では、マグネット161の磁束を磁気センサからなる2つのロータ位置検出センサ171,172によって検出して、コイルへの通電タイミングを制御しているが、ロータ位置を検出する手段は、これに限定されない。
【0072】
例えば、ロータの回転に伴って変位する検出用マグネットを配置してローラ位置を検出してもよいし、遮光板やパターン面を光学センサによって読み取ってローラ位置を検出してもよい。また、ロータ位置検出センサがモータと一体に固定されていてもよいし、モータとは別の部材に固定されていてもよい。
【0073】
以上より、非フィードバック通電切替モード及びフィードバック通電切替モードの特徴について整理すると、次のようになる。
【0074】
非フィードバック通電切替モードは、高速での駆動が制限されるが、正確な速度制御及び低速でも安定した駆動が可能であり、しかもマイクロステップ駆動によって1ステップを分割して位置決めできるため、分解能が高く、微小変位の制御性が高い。
【0075】
従って、非フィードバック通電切替モードでモータ160の駆動することで、回転部材8の回転動作(絞り羽根1〜7の開閉動作)を静かで滑らかに行うことができると共に、回転部材8の回転方向の停止位置の位置決め精度を高めることができる。
【0076】
一方、フィードバック通電切替モードは、低速駆動時の位置決め精度は低下するが、高速度、高効率でモータ160を駆動することが可能である。
【0077】
従って、フィードバック通電切替モードでモータ160の駆動することで、回転部材8の回転動作(絞り羽根1〜7の開閉動作)を高速で行うことができる。
【0078】
ここで、本実施形態では、絞り羽根1〜7を開閉動作させる回転部材8をモータ160により目標位置まで駆動する際に、制御回路23により、次の第1〜第3の駆動制御モードの何れかを選択してモータ160を駆動する。
【0079】
第1の駆動制御モード:モータ160を非フィードバック通電切替モードで駆動を開始してからフィードバック通電切替モードに切り替えて高速で駆動した後、再び非フィードバック通電切替モードに切り替えて比較的低速で駆動し、正確な位置で停止させる。
【0080】
第2の駆動制御モード:モータ160を非フィードバック通電切替モードのみで比較的低速で駆動し、正確な位置で停止させる。
【0081】
第3の駆動制御モード:モータ160をフィードバック通電切替モードのみで高速で駆動して停止させる。
【0082】
制御回路23による上記第1〜第3の駆動制御モードの選択処理は、デジタルカメラの処理状態に基づき行われる。以下、具体的に説明する。
【0083】
1.撮像装置20の電源ON(起動)時には、第1の駆動制御モードが選択される。撮影モードが動画モードの場合、或いは撮影モードが静止画モードでファインダモードが被写体像を表示部36に表示するEVFモードの場合は、第1の駆動制御モードによりモータ160を駆動して、回転部材8を待機位置から撮影開始初期位置まで回転させる。
【0084】
2.回転部材8の待機位置復帰時には、第3の駆動制御モードが選択される。撮像装置20の起動時に回転部材8が待機位置に配置されていない場合は、第3の駆動制御モードによりモータ160を駆動して、回転部材8を待機位置まで回転させる。回転部材8が待機位置に配置されているか否かは、制御回路23が待機位置検出センサ12からの信号に基づき判断する。
【0085】
3.撮像装置20のファインダモード切替時には、第1の駆動制御モードが選択される。OVFモードからEVFモードへの切り替え時には、第1の駆動制御モードによりモータ160を駆動して、回転部材8を待機位置から撮影開始初期位置まで回転させる。また、EVFモードからOVFモードへ切り替え時において、回転部材8が待機位置に配置されていない場合は、第1の駆動制御モードによりモータ160を駆動して、回転部材8を待機位置まで回転させる。
【0086】
4.表示部36に被写体像を表示中の場合は、第2の駆動制御モードが選択される。表示部36に被写体像を表示中の場合は、第2の駆動制御モードによりモータ160をマイクロステップ駆動して、回転部材8を回転させ、絞り羽根1〜7を静かで滑らかに開閉動作させる。
【0087】
5.被写体像を撮影中の場合は、第2の駆動制御モードが選択される。被写体像を撮影中の場合は、第2の駆動制御モードによりモータ160をマイクロステップ駆動して、回転部材8を回転させ、絞り羽根1〜7を静かで滑らかに開閉動作させる。
【0088】
6.撮像装置20の電源OFF(終了)時には、第1の駆動制御モードが選択される。撮像装置20の電源OFF時に回転部材8が待機位置に配置されていない場合は、第1の駆動制御モードによりモータ160を駆動して、回転部材8を待機位置まで回転させる。
【0089】
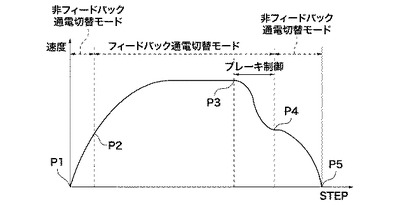
次に、図7を参照して、第1の駆動制御モードにおけるモータ160の動作について説明する。なお、図7の縦軸はモータ駆動時のロータ162の回転速度、横軸は駆動ステップ数を表す。
【0090】
図7に示すように、モータ160は、起動時(P1)から非フィードバック通電切換モードで起動した後、駆動ステップ数(P2)になると、フィードバック通電切替モードに切り替えられて高速で駆動する。また、駆動ステップ数(P3)になると、モータ160の通電切り替えタイミングを遅らせるブレーキ通電制御によりロータ162を減速駆動する。
【0091】
そして、駆動ステップ数(P4)に達すると、モータ160は、駆動モードが非フィードバック通電切替モード(例えば2相ステップ駆動や1−2相ステップ駆動)に切り替えられて、さらに減速駆動し、目標位置(P5)で停止する。
【0092】
これにより、モータ160は、起動時から所定の駆動ステップ数までは脱調することなく高速・高効率で駆動することができ、減速時には正確な速度制御が可能となるため、ロータ162を正確な位置で停止させることができる。
【0093】
次に、図8を参照して、第2の駆動制御モードにおけるモータ160の動作について説明する。なお、図8の縦軸はモータ駆動時のロータ162の回転速度、横軸は駆動ステップ数を表す。
【0094】
図8に示すように、モータ160は、起動(P1)から非フィードバック通電切替モードで一定速度で駆動して目標位置(P5)で停止する。具体的には、2つのコイル163,164に対する電流比をより細かく制御するマイクロステップ駆動を行うことで、正確な速度制御が可能となり、ロータ162を正確な位置に停止させ、また、静かで滑らかな駆動が可能となる。
【0095】
次に、図9を参照して、本実施形態のデジタルカメラの動作例について説明する。図9での各処理は、ROM等に記憶されたプログラムがRAMにロードされて、制御回路23のCPU等により実行される。
【0096】
ステップS100では、制御回路23は、電池交換等により電源が投入されると、待機位置検出センサ12からの信号に基づき、回転部材8が待機位置(絞り羽根1〜7が開放状態)にあるか否かを判断する。そして、制御回路23は、回転部材8が待機位置に配置されていない場合は、モータ160を絞り羽根1〜7の絞り方向とは逆方向に回転させる待機位置セット駆動を行う。
【0097】
ここで、待機位置セット駆動を行う際には、制御回路23は、切替回路30によりフィードバック通電切替ドライバ28に切り替え、フィードバック通電切替ドライバ28により第3の駆動制御モードのみでモータ160を高速で駆動する。そして、制御回路23は、待機位置検出センサ12からの信号に基づき、回転部材8が待機位置に配置されたことを検知すると、ステップS101に進む。
【0098】
ステップS101では、制御回路23は、不図示のモードダイアルスイッチの設定位置を判定する。そして、制御回路23は、モードダイアルスイッチが電源OFFに設定されている場合は、ステップS104に進み、撮影モードに設定されている場合は、ステップS102に進み、再生モードに設定されている場合は、ステップS103に進む。
【0099】
ステップS104では、制御回路23は、終了処理を行った後、ステップS101に戻る。ここでの終了処理の詳細については、図14を用いて後述する。
【0100】
ステップS103では、制御回路23は、記録部37に記録された被写体の画像データを表示部36に表示してステップS101に戻る。
【0101】
ステップS102では、制御回路23は、ファインダモード切替部39の設定状態を確認し、光学ファインダ(OVF)モードに設定されている場合は、ステップS107に進み、電子ファインダ(EVF)モードに設定されている場合は、ステップS105に進む。
【0102】
ステップS105では、制御回路23は、ミラー33やシャッタ装置27、絞り装置22を駆動するEVFモード設定を行い、ステップS106に進み。ここでのEVFモード設定処理の詳細については図10を用いて後述する。
【0103】
ステップS106では、制御回路23は、撮像した画像データを画像表示回路35により表示部36に逐次表示するスルー表示状態に設定し、ステップS107に進む。このスルー表示状態では、絞り装置22を駆動するモータ160の制御と撮像素子24の電子シャッタとの組み合わせでAE制御が逐次行われる。ここでのモータ160の制御は、制御回路23が切替回路30により非フィードバック通電切替ドライバ29に切り替えて、第2の駆動制御モード(非フィードバック通電切替モード)でモータ160をマイクロステップ駆動することで、静かで滑らかな駆動を行う。
【0104】
ステップS107では、制御回路23は、不図示のレリーズボタンが半押しされてSW1スイッチがONされたか否かを判断し、ONされた場合は、ステップS108に進み、ONされない場合は、ステップS101に戻る。
【0105】
ステップS108では、制御回路23は、測光回路25により測光処理を行って、ステップS109に進む。この測光処理の詳細については、図11を用いて後述する。
【0106】
ステップS109では、制御回路23は、レリーズボタンが全押しされてSW2スイッチがONされたか否かを判断し、ONされた場合は、ステップS110に進み、ONされない場合は、ステップS111に進む。
【0107】
ステップS111では、制御回路23は、レリーズボタンが半押しされてSW1スイッチがONされたか否かを判断し、ONされた場合は、ステップS109に戻り、ONされない場合は、ステップS101に戻る。
【0108】
一方、ステップS110では、制御回路23は、撮影モード切替部34で設定された撮影モードの状態を判別し、静止画撮影モードであれば、ステップS112に進み、動画撮影モードであれば、ステップS113に進む。
【0109】
ステップS112では、制御回路23は、静止画撮影処理を実行し、ステップS114に進む。この静止画撮影処理については、図12を用いて後述する。
【0110】
ステップS113では、制御回路23は、動画撮影処理を実行し、ステップS115に進む。この動画撮影処理の詳細については、図13を用いて後述する。
【0111】
ステップS114では、制御回路23は、SW2スイッチがONの状態であるか否かを判断し、ONの状態である場合は、ステップS116に進み、ONの状態でない場合は、ステップS115に進む。
【0112】
ステップS116では、制御回路23は、不図示の連写モード設定スイッチの状態を判別する。そして、制御回路23は、判別の結果、連写モードが設定されていれば、ステップS112に戻って、静止画撮影を繰り返し、連写モードが設定されていなければ、ステップS115に進む。
【0113】
ステップS115では、制御回路23は、SW1スイッチがONの状態か否かを判断し、ONの状態である場合は、ステップS109に戻り、ONの状態でない場合は、ステップS101に戻る。
【0114】
次に、図10を参照して、図9のステップS105におけるEVFモード設定処理について説明する。
【0115】
まず、ステップS201では、制御回路23は、ミラー駆動回路32によりミラー33を駆動して撮影光路外に退避させ、ステップS202に進む。
【0116】
ステップS202では、制御回路23は、シャッタ駆動回路26によりシャッタ装置27を駆動してシャッタを開き、ステップS203に進む。
【0117】
ステップS203では、制御回路23は、撮像素子24から撮影した画像データを読み込み、ステップS204に進む。
【0118】
ステップS204では、制御回路23は、ステップS203で読み込んだ画像データからシャッタ速度と絞り値を算出し、絞り装置22を駆動するモータ160の制御と撮像素子24の電子シャッタとの組み合わせでAE制御を行う。このときの制御回路23によるモータ160の制御は、第1の駆動制御モードで行われる。すなわち、制御回路23は、モータ160を非フィードバック通電切替モードで駆動を開始してからフィードバック通電切替モードに切り替えて駆動した後、再び非フィードバック通電切替モードに切り替えて駆動して停止するように制御する。
【0119】
ここで、ステップS204でのモータ160の制御について詳しく説明する。
【0120】
まず、制御回路23は、モータ160を所定の通電位相でイニシャル通電する。その後、制御回路23は、非フィードバック通電切替ドライバ29により、非フィードバック通電切替モードでモータ160の駆動を開始してから切替回路30によりフィードバック通電切替ドライバ28に切り替える。これにより、フィードバック通電切替モードでモータ160を高速駆動する。このとき、モータ160のピニオン11が図1の反時計回り方向に回転することで、ピニオン11に噛合するギア部8jを有する回転部材8が図1の時計回り方向に回転する。
【0121】
回転部材8の穴部8b〜8hには、絞り羽根1〜7の第1軸部1c〜7cが嵌合しているので、絞り羽根1〜7は、それぞれ第1軸部1c〜7cが動かされることで、第2軸部1d〜7dがカム部材9のカム溝9b〜9hに沿って移動する。これにより、絞り羽根1〜7が回転動作して、カム部材9の開口部9aから絞り位置への挿入状態になる。
【0122】
このとき、制御回路23は、モータ160の駆動ステップが目標ステップ数の所定ステップ前になるまでモータ160の高速駆動を継続し、所定ステップ前になると、モータ160の通電切替タイミングを遅らせるブレーキ通電制御によりロータ162を減速させる。その後、制御回路23は、切替回路30により非フィードバック通電切替ドライバ29に切り替え、非フィードバック通電切替モードでモータ160を更に減速駆動して目標位置(目標ステップ数)に正確に停止させる。この状態が撮影開始初期位置となる。
【0123】
なお、ここでの絞り装置22の駆動は、算出された絞り値が開放状態となる場合(例えばユーザが任意の絞り値を設定する撮影モードで絞りを開放に設定した場合)は行われない。
【0124】
次に、図11を参照して、図9のステップS108における測光処理について説明する。
【0125】
まず、ステップS301では、制御回路23は、ファインダモード切替部39の状態を確認する。そして、制御回路23は、確認の結果、光学ファインダモード(OVFモード)に設定されている場合は、ステップS302に進み、電子ファインダモード(EVFモード)に設定されている場合は、ステップS304に進む。
【0126】
ステップS302では、制御回路23は、測光回路25により光学ファインダ38の観察画面内の被写体輝度を測定する測光センサで定常光の測光を行い、ステップS303に進む。
【0127】
ステップS302では、制御回路23は、測光センサの測光値と設定されているISO感度とに応じて露出値(シャッタ速度と絞り値)を演算し、光学ファインダモードでの測光処理ルーチンを終了する。
【0128】
一方、ステップS304では、制御回路23は、撮像素子24から撮影した画像データを逐次読み込み、ステップS305に進む。
【0129】
ステップS305では、制御回路23は、ステップS304で読み込んだ画像データから算出したシャッタ速度と絞り値の演算結果を用いて、露出(AE)が適正か否かを判断する。そして、制御回路23は、露出が適正でない場合は、ステップS306に進んで、露出が適正と判断できるまで、絞り装置22を駆動するモータ160の制御と撮像素子24の電子シャッタとの組み合わせでAE制御を行う。
【0130】
このとき、モータ160の制御は、第2の駆動制御モードで行われる。すなわち、制御回路23は、非フィードバック通電切替ドライバ29により非フィードバック通電切替モードのみでモータ160のマイクロステップ駆動を行うことで、静かで滑らかなモータ駆動を行う。そして、制御回路23は、ステップS305で露出(AE)が適正になると、電子ファインダモード(EVFモード)での測光処理ルーチンを終了する。
【0131】
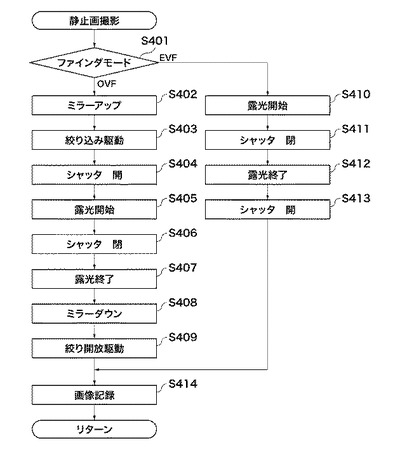
次に、図12を参照して、図9のステップS112における静止画撮影処理について説明する。
【0132】
まず、ステップS401では、制御回路23は、ファインダモード切替部39の状態を確認する。そして、制御回路23は、確認の結果、光学ファインダモード(OVFモード)に設定されている場合は、ステップS402に進み、電子ファインダモード(EVFモード)に設定されている場合は、ステップS410に進む。
【0133】
ステップS402では、制御回路23は、ミラー駆動回路32によりミラー33を駆動させて撮影光路外に退避させ、ステップS403に進む。
【0134】
ステップS403では、制御回路23は、図11のステップS303で算出された絞り値に応じて絞り装置22を駆動するモータ160を制御して絞り羽根1〜7の絞り込み駆動を行い、ステップS404に進む。ここでのモータ160の制御は、第1の駆動制御モード(モータ160を非フィードバック通電切替モードで駆動を開始してからフィードバック通電切替モードに切替えて駆動した後、再び非フィードバック通電切替モードに切替えて駆動して停止する)で行われる。なお、第1の駆動制御モードについては、図10のステップS204で説明した内容と同様であるので、説明を省略する。
【0135】
ステップS404では、制御回路23は、シャッタ駆動回路26によりシャッタ装置27を駆動してシャッタを開き、ステップS405に進む。
【0136】
ステップS405では、制御回路23は、撮像素子24から撮影した画像データの読み込み(露光)を開始し、所定の露光時間(図11のステップS303で算出されたシャッタ速度)が終了すると、ステップS406に進む。
【0137】
ステップS406では、制御回路23は、シャッタ駆動回路26によりシャッタ装置27を駆動してシャッタを閉じ、ステップS407に進む。
【0138】
ステップS407では、制御回路23は、撮像素子24での電荷の蓄積を終了して露光を終了し、ステップS408に進む。
【0139】
ステップS408では、制御回路23は、ミラー駆動回路32により撮影光路外に退避していたミラー33を駆動して元の位置に戻し、ステップS409に進む。
【0140】
ステップS409では、制御回路23は、絞り装置22を駆動するモータ160を制御して回転部材8を待機位置(絞り羽根1〜7の開放位置)まで駆動し、ステップS414に進む。このとき、モータ160の制御は、ステップS403の絞り込み駆動時と同様に第1の駆動制御モードで行われ、モータ160を絞り込み駆動時とは逆の図1の時計回り方向に回転させる。なお、モータ160の制御の詳細については、図1の時計回り方向に回転させる点を除き、ステップS403と同様であるので、説明を省略する。
【0141】
ステップS414では、制御回路23は、撮像素子24から読み込んだ電荷信号(画像データ)に対してデジタル変換処理や画像処理、画像圧縮処理等の所定の処理を行った後、記録部37によりメモリーカード等の記録媒体に記録する。これにより、光学ファインダモード(OVFモード)での静止画撮影処理ルーチンを終了する。
【0142】
一方、ステップS410では、制御回路23は、撮像素子24の露光を開始し、所定の露光時間(図11のステップS303で算出されたシャッタ速度)が終了すると、ステップS411に進む。
【0143】
ステップS411では、制御回路23は、シャッタ駆動回路26によりシャッタ装置27を駆動してシャッタを閉じ、ステップS412に進む。
【0144】
ステップS412では、制御回路23は、撮像素子24の蓄積を終了して露光を終了し、ステップS413に進む。
【0145】
ステップS413では、制御回路23は、シャッタ駆動回路26によりシャッタ装置27を駆動してシャッタを開き、ステップS414に進む。
【0146】
ステップS414では、制御回路23は、撮像素子24から読み込んだ電荷信号(画像データ)に対してデジタル変換処理や画像処理、画像圧縮処理等の所定の処理を行った後、記録部37によりメモリーカード等の記録媒体に記録する。これにより、電子ファインダモード(EVFモード)での静止画撮影処理ルーチンを終了する。
【0147】
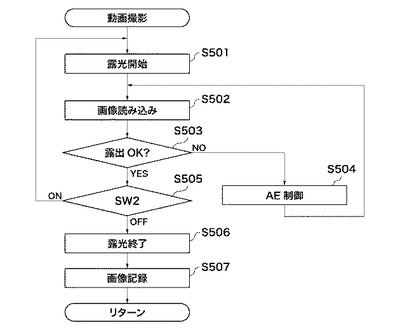
次に、図13を参照して、図9のステップS113における動画撮影処理について説明する。
【0148】
まず、ステップS501では、制御回路23は、撮像素子24の露光を開始しステップS502に進む。
【0149】
ステップS502では、制御回路23は、動画の1フレーム毎に撮像素子24から電荷信号(画像データ)を読み出し、デジタル変換処理や画像処理、画像圧縮処理等の所定の処理を行った後、不図示のメモリに格納し、ステップS503に進む。
【0150】
ステップS503では、制御回路23は、ステップS502で読み込んだ画像データから算出したシャッタ速度と絞り値の演算結果を用いて、露出(AE)が適正か否かを判断する。そして、制御回路23は、露出が適正でない場合は、ステップS504に進んで、露出が適正と判断できるまで、絞り装置22を駆動するモータ160の制御と撮像素子24の電子シャッタとの組み合わせでAE制御を行う。
【0151】
このとき、モータ160の制御は、第2の駆動制御モードで行われる。すなわち、制御回路23は、非フィードバック通電切替ドライバ29により非フィードバック通電切替モードのみでモータ160のマイクロステップ駆動を行うことで、静かで滑らかなモータ駆動を行う。そして、制御回路23は、ステップS503で露出(AE)が適正になると、ステップS505に進む。
【0152】
ステップS505では、制御回路23は、SW2スイッチがONの状態であるか否かを判定し、ONの状態であれば、ステップS501に戻り、ONの状態でなければ、ステップS506に進む。
【0153】
ステップS506では、制御回路23は、撮像素子24の露光を終了し、ステップS507に進む。
【0154】
ステップS507では、制御回路23は、ステップS502でメモリに格納した動画像データを、記録部37によりメモリーカード等の記録媒体に記録し、動画撮影処理ルーチンを終了する。
【0155】
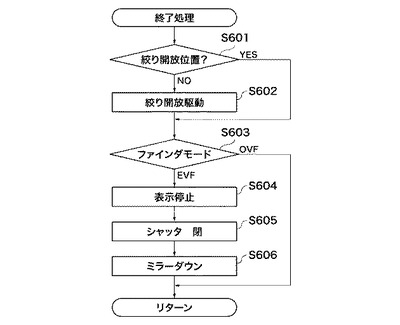
次に、図14を参照して、図9のステップS104における終了処理について説明する。
【0156】
まず、ステップS601では、制御回路23は、待機位置検出センサ12からの信号に基づき、回転部材8が待機位置(絞り羽根1〜7が開放位置)にあるか否かを判断する。そして、制御回路23は、回転部材8が待機位置にある場合は、ステップS603に進み、回転部材8が待機位置にない場合は、ステップS602に進む。
【0157】
ステップS602では、制御回路23は、モータ160を絞り方向とは逆方向に回転させる戻り駆動を行い、ステップS603に進む。戻り駆動は、第1の駆動制御モード(モータ160を、非フィードバック通電切替モードで駆動を開始してからフィードバック通電切替モードに切替えて駆動した後、再び非フィードバック通電切替モードに切替えて駆動して停止する)で行われる。
【0158】
ステップS603では、制御回路23は、ファインダモード切替部39の状態を確認する。そして、制御回路23は、確認の結果、光学ファインダモード(OVFモード)に設定されている場合は、終了処理ルーチンを終了し、電子ファインダモード(EVFモード)に設定されている場合は、ステップS604に進む。
【0159】
ステップS604では、制御回路23は、画像表示回路35により表示部36に表示されている被写体の画像データの表示を停止し、ステップS605に進む。
【0160】
ステップS605では、制御回路23は、シャッタ駆動回路26によりシャッタ装置27を駆動してシャッタを閉じ、ステップS606に進む。
【0161】
ステップS606では、制御回路23は、ミラー駆動回路32により撮影光路外に退避していたミラー33を駆動して元の位置に戻し、終了処理ルーチンを終了する。
【0162】
以上説明したように、本実施形態では、デジタルカメラの起動時に、撮影モードが動画モードの場合、或いは撮影モードが静止画モードでファインダモードが被写体像を表示部36に表示するEVFモードの場合に、第1の駆動制御モードでモータ160を駆動する。これにより、回転部材8(絞り羽根1〜7)を待機位置から撮影開始初期位置まで高速で駆動することができると共に、絞り羽根1〜7を撮影開始初期位置に精度よく停止させることができる。この結果、撮影準備の高速化が可能となり、撮影開始タイムラグを短縮することができるとともに、絞り口径精度を高めることができる。
【0163】
また、本実施形態では、デジタルカメラの起動時に回転部材8が待機位置にない場合は、第3の駆動制御モードでモータ160を高速で駆動して、回転部材8を待機位置まで回転させる。これにより、撮影準備の高速化が可能となり、撮影開始タイムラグを短縮することができる。
【0164】
更に、本実施形態では、ファインダモードをOVFモードからEVFモードへ切り替えた場合、第1の駆動制御モードでモータ160を駆動して回転部材8を待機位置から撮影開始初期位置まで駆動する。また、ファインダモードをEVFモードからOVFモードへ切り替えた際に回転部材8が待機位置にない場合は、第1の駆動制御モードでモータ160を駆動して回転部材8を待機位置から撮影開始初期位置まで駆動する。これにより、ファインダモード切替後の撮影開始タイムラグを短縮することができるとともに、絞り羽根1〜7を撮影開始初期位置に精度よく停止させて絞り口径精度を高めることができる。
【0165】
更に、本実施形態では、被写体の撮影中及び被写体像を表示部36に表示中は、モータ160を第2の駆動制御モードでマイクロステップ駆動するので、絞り羽根1〜7を静かで滑らかに開閉動作させることができる。
【0166】
更に、本実施形態では、電源OFF時には、第1の駆動制御モードでモータ160を駆動するので、終了時の迅速な処理が可能となる。
【0167】
なお、本発明の構成は、上記実施形態に例示したものに限定されるものではなく、材質、形状、寸法、形態、数、配置箇所等は、本発明の要旨を逸脱しない範囲において適宜変更可能である。
【符号の説明】
【0168】
1〜7 絞り羽根
8 回転部材
12 待機位置検出センサ
22 絞り装置
23 制御回路
28 フィードバック通電切替ドライバ
29 非フィードバック通電切替ドライバ
30 切替回路
160 モータ
171,172 ロータ位置検出センサ
【技術分野】
【0001】
本発明は、例えばデジタルカメラ等の撮像装置に関する。
【背景技術】
【0002】
デジタルカメラ等の撮像装置には、撮像素子に結像される被写体光の光量を調節するため、絞りの開口径を制御する光量調節装置(絞り装置)が設けられている。
【0003】
この光量調節装置は、遮光部材としての複数の絞り羽根を備え、ステッピングモータを駆動動力源として絞り羽根の開口径を調整するものが主流となっているが、ステッピングモータは、高速駆動または負荷変動により脱調が起こる可能性がある。このため、モータの駆動速度を制限したり、負荷トルクに安全率を見込む必要があり、低効率で駆動することになってしまう。
【0004】
また、静止画撮影時におけるシャッタタイムラグの短縮化の要請により、ステッピングモータを目標位置まで高速度で駆動することで、絞り羽根の駆動に要する時間を短縮することが望まれている。
【0005】
ステッピングモータを用いて絞り羽根を高速で駆動するには、ステップ幅の大きいモータを用いるか、動力伝達機構の減速比を低くすることが考えられるが、この場合、モータの高分解能を得ることが困難となり、絞り口径の精度が悪化する。
【0006】
また、ステッピングモータのサイズを大型化することなく、絞り羽根を高速で駆動するには、モータに通電する電圧値或いは電流値を高めることが考えられるが、この場合は電源となる電池の消耗が激しくなる。すなわち、ステッピングモータを駆動動力源とした光量調節装置では、絞り羽根の高速駆動と停止位置の高精度化との両立は難しい。
【0007】
一方、静止画及び動画を撮影可能なデジタルカメラでは、速写性を重視して光量調節装置を高速駆動するため、光量調節装置の駆動音が大きくなり、この駆動音が動画撮影時にノイズとして記録されてしまう問題が生じていた。
【0008】
そこで、撮影モードに応じて、被駆動部材を駆動するアクチュエータの速度上限及び加減速特性の少なくとも一方を変更制御する技術が提案されている(特許文献1)。具体的には、静止画撮影モードでは、アクチュエータの駆動モードが非静音モードとなり、動画撮影モードでは、アクチュエータの駆動モードが静音モードとなるように、アクチュエータの速度上限及び加減速特性の少なくとも一方を変更制御する。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2007−6305号号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかし、上記特許文献1では、動画撮影モード時にアクチュエータの駆動モードが静音モードとなるように、アクチュエータの速度上限が低く設定されたり、緩やかな加減速特性に設定されたりする。したがって、被駆動部材の駆動音は小さくなるものの、被駆動部材の駆動に要する時間は増えてしまう。
【0011】
そこで、本発明は、被駆動部材の高速駆動を可能にすることができると共に、被駆動部材の停止位置精度を向上させることができ、更には、被駆動部材の駆動音も小さくすることができる撮像装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
上記目的を達成するために、本発明の撮像装置は、被駆動部材を駆動するモータと、前記モータのロータの回転位置を検出する検出手段と、前記ロータ位置検出手段による検出結果に従って前記モータのコイルへの通電方向を切り替えて前記モータを駆動する第1の駆動手段と、入力された駆動パルス間隔に従って前記モータのコイルへの通電方向を切り替えて前記モータを駆動する第2の駆動手段と、前記第1の駆動手段と前記第2の駆動手段とを切り替える切替手段と、装置の起動時に前記被駆動部材を待機位置から撮影開始初期位置まで動作させる場合は、前記モータを前記第2の駆動手段で駆動を開始し、前記第1の駆動手段で駆動した後、再び前記第2の駆動手段で駆動して停止させるように前記切替手段を制御し、被写体の画像を表示部に表示している場合、及び被写体を撮影している場合は、前記第2の駆動手段のみで前記モータを駆動するように前記切替手段を制御する制御手段と、を備えることを特徴とする。
【発明の効果】
【0013】
本発明によれば、被駆動部材の高速駆動を可能にすることができると共に、被駆動部材の停止位置精度を向上させることができ、更には、被駆動部材の駆動音も小さくすることができる。
【図面の簡単な説明】
【0014】
【図1】本発明の撮像装置の実施形態の一例であるデジタルカメラに設けられる絞り装置の分解斜視図である。
【図2】モータの構成例について説明するための斜視図である。
【図3】デジタルカメラの制御系を説明するためのブロック図である。
【図4】ステータとロータとロータ位置検出センサとの位相関係を説明するための断面図である。
【図5】フィードバック通電切替モードの動作を説明するためのモータの断面図である。
【図6】(a)はロータの回転角度とモータトルクとの関係を示すグラフ図、(b)はロータの回転角度とロータ位置検出センサの出力との関係を示すグラフ図である。
【図7】第1の駆動制御モードにおけるロータの回転速度とモータの駆動ステップ数との関係を示すグラフ図である。
【図8】第2の駆動制御モードにおけるロータの回転速度とモータの駆動ステップ数との関係を示すグラフ図である。
【図9】デジタルカメラの動作例を説明するためのフローチャート図である。
【図10】図9のステップS105におけるEVFモード設定処理を説明するためのフローチャート図である。
【図11】図9のステップS108における測光処理を説明するためのフローチャート図である。
【図12】図9のステップS112における静止画撮影処理を説明するためのフローチャート図である。
【図13】図9のステップS113における動画撮影処理を説明するためのフローチャート図である。
【図14】図9のステップS104における終了処理を説明するためのフローチャート図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施形態の一例を図面を参照して説明する。
【0016】
図1は、本発明の撮像装置の実施形態の一例であるデジタルカメラに設けられる絞り装置の分解斜視図である。
【0017】
図1に示す絞り装置22は、遮光部材としての複数の絞り羽根1〜7、回転部材8、カム部材9、及び押え部材10を備える。
【0018】
絞り羽根1〜7は、合成樹脂等の薄板状の成形品とされ、遮光性を有して開口量を規制する第1基部1a〜7a及び第2基部1b〜7bを有する。第1基部1a〜7aの一方の面には第1軸部1c〜7cが設けられ、第1基部1a〜7aの他方の面には、第2軸部1d〜7d(一部不図示)が設けられる。
【0019】
回転部材8は、絞り羽根1〜7を開閉動作させるためのリング状の部材であり、中央部に設けられた開口部8aの周囲には、突起部8iが設けられ、突起部8iの径方向外側には、穴部8b〜8h、ギア部8j、及び遮光部8kが設けられる。穴部8b〜8hは、回転部材8の一方の面に周方向に所定の間隔で配置され、ギア部8j及び遮光部8kは、穴部8fと穴部8dとの間に配置される。ここで、回転部材8は、本発明の被駆動部材の一例に相当する。
【0020】
カム部材9は、リング状に形成されており、中央部に設けられた開口部9aの周囲には、複数のカム溝9b〜9hが周方向に略等間隔で設けられている。
【0021】
押え部材10は、リング状に形成されており、中央部に設けられた開口部10aの周囲には、センサ取付部10b及びモータ取付穴10cが周方向に隣接して設けられている。また、押え部材10には、回転部材8の遮光部8kが挿入される円弧状の穴10dがセンサ取付部10bに連通して設けられている。そして、センサ取付部10bには、待機位置検出センサ12が取り付けられ、モータ取付穴10cには、モータ160が取り付けられる。
【0022】
モータ160は、回転部材8を回転駆動するためのものであり、モータ取付穴10cに取り付けられた状態では、モータ軸に固定されたピニオン11がモータ取付穴10cを挿通して、回転部材8のギア部8jに噛合する。モータ160は、2つのコイル163,164(図2参照)を備える2相のステッピングモータにロータ位置検出センサ171,172(図2参照)を配置して構成される。
【0023】
また、モータ160は、フィードバック通電切替モードと非フィードバック通電切替モードとの2つのモードで駆動可能とされている。フィードバック通電切替モードでは、ロータ位置検出センサ171,172によるロータ位置の検出結果に従ってコイル163,164への通電方向を切り替える。また、非フィードバック通電切替モードでは、決められた時間間隔に従ってコイル163,164への通電方向を切り替える。
【0024】
ここで、図2を参照して、モータ160の構成例について詳しく説明する。図2は、モータ160の外観斜視図である。
【0025】
図2に示すように、モータ160は、マグネット161を有するロータ162、コイル163,164、ステータ165,166、及びロータ位置検出センサ171,172を備える。
【0026】
ロータ162は、ステータ165,166に対して回転可能に支持される。ロータ162には、マグネット161が一体に固定されており、マグネット161は、外周が多極着磁された円筒形状の永久磁石とされ、角度位置に対して径方向の磁力の強さが正弦波状に変化する着磁パターンを有する。
【0027】
ステータ165は、コイル163に励磁される4つの磁極歯165a〜165d(図3参照)を有する。磁極歯165a〜165dは、マグネット161の外周面に対して所定の隙間を持って対向配置される。ステータ166は、コイル164に励磁される4つの磁極歯166a〜166d(図3参照)を有する。磁極歯166a〜166dは、マグネット161の外周面に対して所定の隙間を持って対向配置される。
【0028】
ロータ位置検出センサ171,172は、マグネット161の磁束を検出して、電気角で90°ずつ位相のずれた信号をロータの回転位置の検出信号として出力するホールセンサである。ここで、マグネット161の極数をnとすると、電気角360°は実際のロータ角度の720/n°に相当する。
【0029】
図1に戻って、センサ取付部10bに取り付けられた待機位置検出センサ12は、例えば発光部及び受光部を備える光学センサとされている。待機位置検出センサ12は、押え部材10の円弧状の穴10dに挿入された回転部材8の遮光部8kが発光部と受光部との間に挿入された状態か発光部と受光部との間から退避した状態かを検知し、該検知信号を後述する制御回路23に出力する。制御回路23は、待機位置検出センサ12からの検知信号に基づき、回転部材8が待機位置にあるか否かを判断する。
【0030】
そして、押え部材10は、回転部材8及び絞り羽根1〜7を間に挟んでカム部材9に固定され、これにより、回転部材8及び絞り羽根1〜7の光軸方向の抜け止めがなされる。その際、回転部材8の突起部8iは、押え部材10の開口部10aに嵌合されて回転可能に支持される。また、絞り羽根1〜7の第1軸部1c〜7cは、回転部材8の穴部8b〜8hにそれぞれ回動可能に嵌合され、第2軸部1d〜7dは、カム部材9のカム溝9b〜9hにそれぞれ摺動可能に嵌合される。
【0031】
絞り羽根1〜7は、光軸を中心に円周方向に均等配置されて、第1基部1a〜7a及び第2基部1b〜7bが重ね合わされることで絞り開口を制御可能となり、重ね合わせが大きいほど絞り開口量は小さくなる。
【0032】
図3は、本実施形態のデジタルカメラの制御系を説明するためのブロック図である。
【0033】
図3において、制御回路23は、ROM、RAM及びCPU等を含み、デジタルカメラ全体の制御を司る。撮像素子24は、CCDセンサやCMOSセンサ等で構成され、撮影レンズ21を通って入射した被写体光を光電変換して制御回路23に出力する。制御回路23は、撮像素子24からの出力信号を増幅してデジタル映像信号として出力する。なお、撮影レンズ21には、上述した絞り装置22が組み込まれている。
【0034】
測光回路25は、撮影レンズ21、ミラー33及び光学ファインダ38を介して入射した被写体光を測光センサにより検出して検出信号を制御回路23に出力し、制御回路23は、最適なシャッタ速度と絞り値を算出する。シャッタ駆動回路26は、上記で算出されたシャッタ速度に従ってシャッタ装置27を駆動する。2値化回路31は、ロータ位置検出センサ171,172の出力信号を2値化して出力する。
【0035】
フィードバック通電切替ドライバ28、非フィードバック通電切替ドライバ29、及び切替回路30は、絞り装置22を駆動するモータ160の駆動回路を構成する。ここで、フィードバック通電切替ドライバ28は、本発明の第1の駆動手段の一例に相当し、非フィードバック通電切替ドライバ29は、本発明の第2の駆動手段の一例に相当する。
【0036】
フィードバック通電切替ドライバ28は、制御回路23で算出された絞り値に基づきモータ160を駆動する。その際、フィードバック通電切替ドライバ28は、ロータ位置検出センサ171,172から2値化回路31を介して出力されたロータ位置の検出信号に従ってコイルへの通電方向を切り換える。
【0037】
非フィードバック通電切替ドライバ29は、制御回路23で算出された絞り値に基づきモータ160を駆動する。その際、入力された駆動パルス間隔(駆動周波数)に従ってコイルへの通電方向を切り替える。この駆動方式は、通常の2相ステップモータの駆動方式と同様である。
【0038】
切替回路30は、モータ160を駆動する際に、フィードバック通電切替ドライバ28で駆動するか、非フィードバック通電切替ドライバ29で駆動するかを切り替える回路である。フィードバック通電切替ドライバ28、非フィードバック通電切替ドライバ29、及び切替回路30の詳細については、後述する。
【0039】
ミラー駆動回路32は、光学ファインダ38の観察状態ではミラー33を撮影光路内に配置し、撮影状態及び表示部36にリアルタイム画像を表示する電子ファインダ観察状態ではミラー33を撮影光路外に退避させる。
【0040】
撮影モード切替部34は、モードダイアルスイッチ等の操作により、静止画を撮影するモードと動画を撮影するモードとを切り替えて選択する。画像表示回路35は、制御回路23から出力されたデジタル映像信号を液晶表示装置等の表示部36に表示する。記録部37は、メモリーカード等の記録媒体に撮影画像を記録する。
【0041】
ファインダモード切替部39は、スイッチ等の操作により、被写体像を光学ファインダ38で観察する光学ファインダモード(OVFモード)と被写体像を表示部36に表示する電子ファインダモード(EVFモード)とに切り替える。
【0042】
次に、非フィードバック通電切替モードについて説明する。
【0043】
モータ160は、非フィードバック通電切替ドライバ29により非フィードバック通電切替駆動を行うことができる。すなわち、非フィードバック通電切替ドライバ29は、入力された駆動パルス間隔(駆動周波数)とロータの回転方向に従って、コイル163とコイル164への通電を順次切り替えることで、ロータ162を所望の速度で回転させることが可能である。また、非フィードバック通電切替ドライバ29は、入力された駆動パルス数に従って、ロータ162を所望の角度だけ回転させることが可能である。
【0044】
非フィードバック通電切替モードは、入力される駆動パルス間隔によって正確な速度制御が可能であり、また、低速でも安定した駆動が可能である。さらに、非フィードバック通電切替モードは、マイクロステップ駆動によって1ステップの中を分割して位置決めすることができるため、分解能が高く、微小変位の制御性が高い。
【0045】
一方、非フィードバック通電切替モードは、駆動パルス間隔を小さく(駆動周波数を大きく)すると、コイル通電の切り替えに対してロータが応答できなくなり、脱調をおこす可能性がある。このため、駆動パルス間隔に下限を設定するとともに、実際の負荷に対して所定の安全率を見込む必要があり、高速度での駆動が制限される。
【0046】
次に、図4〜図6を参照して、フィードバック通電切替モードについて説明する。図4はモータ160におけるステータ165,166とロータ162とロータ位置検出センサ171,172との位相関係を説明するための断面図、図5はフィードバック通電切替モードの動作を説明するためのモータ160の断面図である。
【0047】
モータ160は、ロータ位置検出センサ171,172から出力される信号によりコイルへの通電を切り替えるフィードバック通電切替モードによって回転することができる。
【0048】
ここで、本実施形態では、マグネット161の極数を8極、着磁角Pを45°とする。また、ステータ165を基準として、ステータ166の位相P/2を−22.5°、ロータ位置検出センサ171の位相β1を+22.5°、ロータ位置検出センサ172の位相β2を−45°とする。
【0049】
以下の説明では、電気角を用いてフィードバック通電切替モードの動作を説明する。電気角とは、マグネット161の磁力の1周期を360°として表したものであり、マグネット161の極数をM、実際の角度をθ0とすると、電気角θは、θ=(θ0×M/2)で表すことができる。
【0050】
ステータ165とステータ166の位相差、ロータ位置検出センサ171とロータ位置検出センサ172との位相差、ステータ165とロータ位置検出センサ171との位相差は、全て電気角で90°である。なお、図4においては、ステータ165の磁極歯165a〜165dの中心とマグネット161のN極中心が径方向に対向して配置されており、この状態をロータ162の初期状態とし、電気角0°とする。
【0051】
図6(a)は、ロータ162の回転角度とモータトルクとの関係を示すグラフ図であり、横軸は電気角、縦軸はモータトルクを示す。モータトルクは、ロータ162を時計回り方向(正方向)に回転させるトルクを正とする。
【0052】
コイル163に正方向の電流を通電すると、ステータ165がN極に磁化し、マグネット161の磁極との間に電磁気力が発生する。また、コイル164に正方向の電流を通電すると、ステータ166がN極に磁化し、マグネット161の磁極との間に電磁気力が発生する。2つの電磁気力を合成すると、ロータ162の回転に伴って略正弦波状のトルクが得られる(トルク曲線A+B+)。
【0053】
なお、他の通電状態においても、同様に、略正弦波状のトルクが得られる(トルク曲線A+B−、A−B−、A−B+)。また、ステータ165は、ステータ166に対して電気角で90°の位相差で配置されるため、4つのトルクは互いに電気角で90°の位相差を持っている。
【0054】
図6(b)は、ロータ162の回転角度とロータ位置検出センサ171,172の出力との関係を示すグラフ図であり、横軸は電気角、縦軸はロータ位置検出センサ171,172の出力を示す。また、ロータ位置検出センサ171の出力をセンサ信号Aとし、ロータ位置検出センサ172の出力をセンサ信号Bとする。
【0055】
マグネット161の径方向の磁力の強さは、電気角に対して略正弦波状になるため、ロータ位置検出センサ171からは略正弦波状の信号が出力される(センサ信号A)。なお、本実施形態では、ロータ位置検出センサ171は、マグネット161のN極と対向するときに正の値を出力する。
【0056】
一方、ロータ位置検出センサ172は、ロータ位置検出センサ171に対して電気角で90°の位相差をもって配置されるため、ロータ位置検出センサ172からは余弦波状の信号が出力される(センサ信号B)。なお、本実施形態では、ロータ位置検出センサ172は、ロータ位置検出センサ171に対して極性を反転しているため、マグネット161のS極と対向するときに正の値を出力する。
【0057】
センサ信号A及びセンサ信号Bに対して2値化回路31で2値化処理を行った信号が、2値化信号A及び2値化信号Bとなる。フィードバック通電切替モードでは、2値化信号Aを基にコイル163への通電方向を切り替え、2値化信号Bを基にコイル164への通電方向を切り替える。
【0058】
すなわち、フィードバック通電切替モードでは、2値化信号Aが正の値を示すとき、コイル163に正方向の電流を流し、2値化信号Aが負の値を示すとき、コイル163に逆方向の電流を流す。また、フィードバック通電切替モードでは、2値化信号Bが正の値を示すとき、コイル164に正方向の電流を流し、2値化信号Bが負の値を示すとき、コイル164に逆方向の電流を流す。
【0059】
次に、図5及び図6を参照して、フィードバック通電切替モードの動作例を説明する。
【0060】
図5(a)は、ロータ162が電気角で135°回転した状態を示している。このときの各センサ信号A,Bは、図6(b)の(a)で示した値を示しており、2値化信号Aは正の値、2値化信号Bは負の値となる。
【0061】
従って、コイル163には正方向の電流が流れてステータ165はN極に磁化し、コイル164には逆方向の電流が流れてステータ166はS極に磁化する。このとき、図6(a)のトルク曲線A+B−に対応する時計回り方向のトルクが発生し、ロータ162はθ方向の回転力を受けて回転する。
【0062】
図5(b)は、ロータ162が電気角で180°回転した状態を示している。この状態では、ロータ位置検出センサ171は、マグネット161のN極とS極との境界に位置するため、電気角180°を境に2値化信号Aは正の値から負の値に切り替わり、コイル163への通電方向が正方向から逆方向へ切り替わる。このときの電気角は、図6(a)のトルク曲線A+B−とトルク曲線A−B−との交点の電気角と一致する。
【0063】
図5(b′)は、ロータ162が電気角で180°回転し、コイル163の通電方向が切り換わった状態を示している。この状態では、コイル163には逆方向の電流が流れてステータ165はS極に磁化し、コイル164には逆方向の電流が流れてステータ166はS極に磁化する。このとき、図6(a)のトルク曲線A−B−に対応する時計回り方向のトルクが発生し、ロータ162はθ方向の回転力を受けて回転する。
【0064】
図5(c)は、ロータ162が電気角で225°回転した状態を示している。この状態では、各センサ信号A,Bは、図6(b)の(c)の値を示しており、2値化信号Aは負の値、2値化信号Bは負の値となる。
【0065】
従って、コイル163には逆方向の電流が流れてステータ165はS極に磁化し、コイル164には逆方向の電流が流れてステータ166はS極に磁化する。このとき、図6(a)のトルク曲線A−B−に対応する時計回り方向のトルクが発生し、ロータ162はθ方向の回転力を受けて回転する。
【0066】
図5(d)は、ロータ162が電気角で270°回転した状態を示している。この状態では、ロータ位置検出センサ172は、マグネット161のN極とS極の境界に位置するため、電気角270°を境に2値化信号Bは負の値から正の値に切り替わり、コイル164への通電方向が逆方向から正方向へ切り替わる。このときの電気角は、図6(a)のトルク曲線A−B−とトルク曲線A−B+との交点の電気角と一致する。
【0067】
図5(d′)は、ロータ162が電気角で270°回転し、コイル164の通電方向が切り替わった状態を示している。この状態では、コイル164には正方向の電流が流れてステータ166はN極に磁化し、コイル163には逆方向の電流が流れてステータ165はS極に磁化する。このとき、図6(a)のトルク曲線A−B+に対応する時計回り方向のトルクが発生し、ロータ162はθ方向の回転力を受けて回転する。
【0068】
以上の動作を繰り返すことで、ロータ162を連続的に回転させることが可能となる。また、2値化信号A,Bの正負を反転させれば、逆回転も可能である。
【0069】
フィードバック通電切替モードでは、駆動パルス数と回転方向を入力することで、ロータを所望の角度だけ回転させることが可能である。また、コイルに流す電流を制御することで各ステータの磁極歯とマグネット磁極との間の磁力を変化させてロータに作用する回転力を制御し、ロータを所望の速度で回転させることが可能である。
【0070】
また、フィードバック通電切替モードでは、ロータ位置検出センサの信号の位相を進めることでモータの特性を変化させることが可能である。フィードバック通電切替モードにおいて高速度でロータを回転させると、通電切替の周期が短くなり、コイルのインダクタンスの影響により、通電切替の周期に比べて電流値の立ち上がりが遅くなる。このため、モータトルクが低くなるが、ロータ位置検出センサの信号の位相を進めることで、電流値の立ち上がりが遅くなるのを防ぎ、高速でのトルク低下を抑えることが可能である。
【0071】
なお、本実施形態では、マグネット161の磁束を磁気センサからなる2つのロータ位置検出センサ171,172によって検出して、コイルへの通電タイミングを制御しているが、ロータ位置を検出する手段は、これに限定されない。
【0072】
例えば、ロータの回転に伴って変位する検出用マグネットを配置してローラ位置を検出してもよいし、遮光板やパターン面を光学センサによって読み取ってローラ位置を検出してもよい。また、ロータ位置検出センサがモータと一体に固定されていてもよいし、モータとは別の部材に固定されていてもよい。
【0073】
以上より、非フィードバック通電切替モード及びフィードバック通電切替モードの特徴について整理すると、次のようになる。
【0074】
非フィードバック通電切替モードは、高速での駆動が制限されるが、正確な速度制御及び低速でも安定した駆動が可能であり、しかもマイクロステップ駆動によって1ステップを分割して位置決めできるため、分解能が高く、微小変位の制御性が高い。
【0075】
従って、非フィードバック通電切替モードでモータ160の駆動することで、回転部材8の回転動作(絞り羽根1〜7の開閉動作)を静かで滑らかに行うことができると共に、回転部材8の回転方向の停止位置の位置決め精度を高めることができる。
【0076】
一方、フィードバック通電切替モードは、低速駆動時の位置決め精度は低下するが、高速度、高効率でモータ160を駆動することが可能である。
【0077】
従って、フィードバック通電切替モードでモータ160の駆動することで、回転部材8の回転動作(絞り羽根1〜7の開閉動作)を高速で行うことができる。
【0078】
ここで、本実施形態では、絞り羽根1〜7を開閉動作させる回転部材8をモータ160により目標位置まで駆動する際に、制御回路23により、次の第1〜第3の駆動制御モードの何れかを選択してモータ160を駆動する。
【0079】
第1の駆動制御モード:モータ160を非フィードバック通電切替モードで駆動を開始してからフィードバック通電切替モードに切り替えて高速で駆動した後、再び非フィードバック通電切替モードに切り替えて比較的低速で駆動し、正確な位置で停止させる。
【0080】
第2の駆動制御モード:モータ160を非フィードバック通電切替モードのみで比較的低速で駆動し、正確な位置で停止させる。
【0081】
第3の駆動制御モード:モータ160をフィードバック通電切替モードのみで高速で駆動して停止させる。
【0082】
制御回路23による上記第1〜第3の駆動制御モードの選択処理は、デジタルカメラの処理状態に基づき行われる。以下、具体的に説明する。
【0083】
1.撮像装置20の電源ON(起動)時には、第1の駆動制御モードが選択される。撮影モードが動画モードの場合、或いは撮影モードが静止画モードでファインダモードが被写体像を表示部36に表示するEVFモードの場合は、第1の駆動制御モードによりモータ160を駆動して、回転部材8を待機位置から撮影開始初期位置まで回転させる。
【0084】
2.回転部材8の待機位置復帰時には、第3の駆動制御モードが選択される。撮像装置20の起動時に回転部材8が待機位置に配置されていない場合は、第3の駆動制御モードによりモータ160を駆動して、回転部材8を待機位置まで回転させる。回転部材8が待機位置に配置されているか否かは、制御回路23が待機位置検出センサ12からの信号に基づき判断する。
【0085】
3.撮像装置20のファインダモード切替時には、第1の駆動制御モードが選択される。OVFモードからEVFモードへの切り替え時には、第1の駆動制御モードによりモータ160を駆動して、回転部材8を待機位置から撮影開始初期位置まで回転させる。また、EVFモードからOVFモードへ切り替え時において、回転部材8が待機位置に配置されていない場合は、第1の駆動制御モードによりモータ160を駆動して、回転部材8を待機位置まで回転させる。
【0086】
4.表示部36に被写体像を表示中の場合は、第2の駆動制御モードが選択される。表示部36に被写体像を表示中の場合は、第2の駆動制御モードによりモータ160をマイクロステップ駆動して、回転部材8を回転させ、絞り羽根1〜7を静かで滑らかに開閉動作させる。
【0087】
5.被写体像を撮影中の場合は、第2の駆動制御モードが選択される。被写体像を撮影中の場合は、第2の駆動制御モードによりモータ160をマイクロステップ駆動して、回転部材8を回転させ、絞り羽根1〜7を静かで滑らかに開閉動作させる。
【0088】
6.撮像装置20の電源OFF(終了)時には、第1の駆動制御モードが選択される。撮像装置20の電源OFF時に回転部材8が待機位置に配置されていない場合は、第1の駆動制御モードによりモータ160を駆動して、回転部材8を待機位置まで回転させる。
【0089】
次に、図7を参照して、第1の駆動制御モードにおけるモータ160の動作について説明する。なお、図7の縦軸はモータ駆動時のロータ162の回転速度、横軸は駆動ステップ数を表す。
【0090】
図7に示すように、モータ160は、起動時(P1)から非フィードバック通電切換モードで起動した後、駆動ステップ数(P2)になると、フィードバック通電切替モードに切り替えられて高速で駆動する。また、駆動ステップ数(P3)になると、モータ160の通電切り替えタイミングを遅らせるブレーキ通電制御によりロータ162を減速駆動する。
【0091】
そして、駆動ステップ数(P4)に達すると、モータ160は、駆動モードが非フィードバック通電切替モード(例えば2相ステップ駆動や1−2相ステップ駆動)に切り替えられて、さらに減速駆動し、目標位置(P5)で停止する。
【0092】
これにより、モータ160は、起動時から所定の駆動ステップ数までは脱調することなく高速・高効率で駆動することができ、減速時には正確な速度制御が可能となるため、ロータ162を正確な位置で停止させることができる。
【0093】
次に、図8を参照して、第2の駆動制御モードにおけるモータ160の動作について説明する。なお、図8の縦軸はモータ駆動時のロータ162の回転速度、横軸は駆動ステップ数を表す。
【0094】
図8に示すように、モータ160は、起動(P1)から非フィードバック通電切替モードで一定速度で駆動して目標位置(P5)で停止する。具体的には、2つのコイル163,164に対する電流比をより細かく制御するマイクロステップ駆動を行うことで、正確な速度制御が可能となり、ロータ162を正確な位置に停止させ、また、静かで滑らかな駆動が可能となる。
【0095】
次に、図9を参照して、本実施形態のデジタルカメラの動作例について説明する。図9での各処理は、ROM等に記憶されたプログラムがRAMにロードされて、制御回路23のCPU等により実行される。
【0096】
ステップS100では、制御回路23は、電池交換等により電源が投入されると、待機位置検出センサ12からの信号に基づき、回転部材8が待機位置(絞り羽根1〜7が開放状態)にあるか否かを判断する。そして、制御回路23は、回転部材8が待機位置に配置されていない場合は、モータ160を絞り羽根1〜7の絞り方向とは逆方向に回転させる待機位置セット駆動を行う。
【0097】
ここで、待機位置セット駆動を行う際には、制御回路23は、切替回路30によりフィードバック通電切替ドライバ28に切り替え、フィードバック通電切替ドライバ28により第3の駆動制御モードのみでモータ160を高速で駆動する。そして、制御回路23は、待機位置検出センサ12からの信号に基づき、回転部材8が待機位置に配置されたことを検知すると、ステップS101に進む。
【0098】
ステップS101では、制御回路23は、不図示のモードダイアルスイッチの設定位置を判定する。そして、制御回路23は、モードダイアルスイッチが電源OFFに設定されている場合は、ステップS104に進み、撮影モードに設定されている場合は、ステップS102に進み、再生モードに設定されている場合は、ステップS103に進む。
【0099】
ステップS104では、制御回路23は、終了処理を行った後、ステップS101に戻る。ここでの終了処理の詳細については、図14を用いて後述する。
【0100】
ステップS103では、制御回路23は、記録部37に記録された被写体の画像データを表示部36に表示してステップS101に戻る。
【0101】
ステップS102では、制御回路23は、ファインダモード切替部39の設定状態を確認し、光学ファインダ(OVF)モードに設定されている場合は、ステップS107に進み、電子ファインダ(EVF)モードに設定されている場合は、ステップS105に進む。
【0102】
ステップS105では、制御回路23は、ミラー33やシャッタ装置27、絞り装置22を駆動するEVFモード設定を行い、ステップS106に進み。ここでのEVFモード設定処理の詳細については図10を用いて後述する。
【0103】
ステップS106では、制御回路23は、撮像した画像データを画像表示回路35により表示部36に逐次表示するスルー表示状態に設定し、ステップS107に進む。このスルー表示状態では、絞り装置22を駆動するモータ160の制御と撮像素子24の電子シャッタとの組み合わせでAE制御が逐次行われる。ここでのモータ160の制御は、制御回路23が切替回路30により非フィードバック通電切替ドライバ29に切り替えて、第2の駆動制御モード(非フィードバック通電切替モード)でモータ160をマイクロステップ駆動することで、静かで滑らかな駆動を行う。
【0104】
ステップS107では、制御回路23は、不図示のレリーズボタンが半押しされてSW1スイッチがONされたか否かを判断し、ONされた場合は、ステップS108に進み、ONされない場合は、ステップS101に戻る。
【0105】
ステップS108では、制御回路23は、測光回路25により測光処理を行って、ステップS109に進む。この測光処理の詳細については、図11を用いて後述する。
【0106】
ステップS109では、制御回路23は、レリーズボタンが全押しされてSW2スイッチがONされたか否かを判断し、ONされた場合は、ステップS110に進み、ONされない場合は、ステップS111に進む。
【0107】
ステップS111では、制御回路23は、レリーズボタンが半押しされてSW1スイッチがONされたか否かを判断し、ONされた場合は、ステップS109に戻り、ONされない場合は、ステップS101に戻る。
【0108】
一方、ステップS110では、制御回路23は、撮影モード切替部34で設定された撮影モードの状態を判別し、静止画撮影モードであれば、ステップS112に進み、動画撮影モードであれば、ステップS113に進む。
【0109】
ステップS112では、制御回路23は、静止画撮影処理を実行し、ステップS114に進む。この静止画撮影処理については、図12を用いて後述する。
【0110】
ステップS113では、制御回路23は、動画撮影処理を実行し、ステップS115に進む。この動画撮影処理の詳細については、図13を用いて後述する。
【0111】
ステップS114では、制御回路23は、SW2スイッチがONの状態であるか否かを判断し、ONの状態である場合は、ステップS116に進み、ONの状態でない場合は、ステップS115に進む。
【0112】
ステップS116では、制御回路23は、不図示の連写モード設定スイッチの状態を判別する。そして、制御回路23は、判別の結果、連写モードが設定されていれば、ステップS112に戻って、静止画撮影を繰り返し、連写モードが設定されていなければ、ステップS115に進む。
【0113】
ステップS115では、制御回路23は、SW1スイッチがONの状態か否かを判断し、ONの状態である場合は、ステップS109に戻り、ONの状態でない場合は、ステップS101に戻る。
【0114】
次に、図10を参照して、図9のステップS105におけるEVFモード設定処理について説明する。
【0115】
まず、ステップS201では、制御回路23は、ミラー駆動回路32によりミラー33を駆動して撮影光路外に退避させ、ステップS202に進む。
【0116】
ステップS202では、制御回路23は、シャッタ駆動回路26によりシャッタ装置27を駆動してシャッタを開き、ステップS203に進む。
【0117】
ステップS203では、制御回路23は、撮像素子24から撮影した画像データを読み込み、ステップS204に進む。
【0118】
ステップS204では、制御回路23は、ステップS203で読み込んだ画像データからシャッタ速度と絞り値を算出し、絞り装置22を駆動するモータ160の制御と撮像素子24の電子シャッタとの組み合わせでAE制御を行う。このときの制御回路23によるモータ160の制御は、第1の駆動制御モードで行われる。すなわち、制御回路23は、モータ160を非フィードバック通電切替モードで駆動を開始してからフィードバック通電切替モードに切り替えて駆動した後、再び非フィードバック通電切替モードに切り替えて駆動して停止するように制御する。
【0119】
ここで、ステップS204でのモータ160の制御について詳しく説明する。
【0120】
まず、制御回路23は、モータ160を所定の通電位相でイニシャル通電する。その後、制御回路23は、非フィードバック通電切替ドライバ29により、非フィードバック通電切替モードでモータ160の駆動を開始してから切替回路30によりフィードバック通電切替ドライバ28に切り替える。これにより、フィードバック通電切替モードでモータ160を高速駆動する。このとき、モータ160のピニオン11が図1の反時計回り方向に回転することで、ピニオン11に噛合するギア部8jを有する回転部材8が図1の時計回り方向に回転する。
【0121】
回転部材8の穴部8b〜8hには、絞り羽根1〜7の第1軸部1c〜7cが嵌合しているので、絞り羽根1〜7は、それぞれ第1軸部1c〜7cが動かされることで、第2軸部1d〜7dがカム部材9のカム溝9b〜9hに沿って移動する。これにより、絞り羽根1〜7が回転動作して、カム部材9の開口部9aから絞り位置への挿入状態になる。
【0122】
このとき、制御回路23は、モータ160の駆動ステップが目標ステップ数の所定ステップ前になるまでモータ160の高速駆動を継続し、所定ステップ前になると、モータ160の通電切替タイミングを遅らせるブレーキ通電制御によりロータ162を減速させる。その後、制御回路23は、切替回路30により非フィードバック通電切替ドライバ29に切り替え、非フィードバック通電切替モードでモータ160を更に減速駆動して目標位置(目標ステップ数)に正確に停止させる。この状態が撮影開始初期位置となる。
【0123】
なお、ここでの絞り装置22の駆動は、算出された絞り値が開放状態となる場合(例えばユーザが任意の絞り値を設定する撮影モードで絞りを開放に設定した場合)は行われない。
【0124】
次に、図11を参照して、図9のステップS108における測光処理について説明する。
【0125】
まず、ステップS301では、制御回路23は、ファインダモード切替部39の状態を確認する。そして、制御回路23は、確認の結果、光学ファインダモード(OVFモード)に設定されている場合は、ステップS302に進み、電子ファインダモード(EVFモード)に設定されている場合は、ステップS304に進む。
【0126】
ステップS302では、制御回路23は、測光回路25により光学ファインダ38の観察画面内の被写体輝度を測定する測光センサで定常光の測光を行い、ステップS303に進む。
【0127】
ステップS302では、制御回路23は、測光センサの測光値と設定されているISO感度とに応じて露出値(シャッタ速度と絞り値)を演算し、光学ファインダモードでの測光処理ルーチンを終了する。
【0128】
一方、ステップS304では、制御回路23は、撮像素子24から撮影した画像データを逐次読み込み、ステップS305に進む。
【0129】
ステップS305では、制御回路23は、ステップS304で読み込んだ画像データから算出したシャッタ速度と絞り値の演算結果を用いて、露出(AE)が適正か否かを判断する。そして、制御回路23は、露出が適正でない場合は、ステップS306に進んで、露出が適正と判断できるまで、絞り装置22を駆動するモータ160の制御と撮像素子24の電子シャッタとの組み合わせでAE制御を行う。
【0130】
このとき、モータ160の制御は、第2の駆動制御モードで行われる。すなわち、制御回路23は、非フィードバック通電切替ドライバ29により非フィードバック通電切替モードのみでモータ160のマイクロステップ駆動を行うことで、静かで滑らかなモータ駆動を行う。そして、制御回路23は、ステップS305で露出(AE)が適正になると、電子ファインダモード(EVFモード)での測光処理ルーチンを終了する。
【0131】
次に、図12を参照して、図9のステップS112における静止画撮影処理について説明する。
【0132】
まず、ステップS401では、制御回路23は、ファインダモード切替部39の状態を確認する。そして、制御回路23は、確認の結果、光学ファインダモード(OVFモード)に設定されている場合は、ステップS402に進み、電子ファインダモード(EVFモード)に設定されている場合は、ステップS410に進む。
【0133】
ステップS402では、制御回路23は、ミラー駆動回路32によりミラー33を駆動させて撮影光路外に退避させ、ステップS403に進む。
【0134】
ステップS403では、制御回路23は、図11のステップS303で算出された絞り値に応じて絞り装置22を駆動するモータ160を制御して絞り羽根1〜7の絞り込み駆動を行い、ステップS404に進む。ここでのモータ160の制御は、第1の駆動制御モード(モータ160を非フィードバック通電切替モードで駆動を開始してからフィードバック通電切替モードに切替えて駆動した後、再び非フィードバック通電切替モードに切替えて駆動して停止する)で行われる。なお、第1の駆動制御モードについては、図10のステップS204で説明した内容と同様であるので、説明を省略する。
【0135】
ステップS404では、制御回路23は、シャッタ駆動回路26によりシャッタ装置27を駆動してシャッタを開き、ステップS405に進む。
【0136】
ステップS405では、制御回路23は、撮像素子24から撮影した画像データの読み込み(露光)を開始し、所定の露光時間(図11のステップS303で算出されたシャッタ速度)が終了すると、ステップS406に進む。
【0137】
ステップS406では、制御回路23は、シャッタ駆動回路26によりシャッタ装置27を駆動してシャッタを閉じ、ステップS407に進む。
【0138】
ステップS407では、制御回路23は、撮像素子24での電荷の蓄積を終了して露光を終了し、ステップS408に進む。
【0139】
ステップS408では、制御回路23は、ミラー駆動回路32により撮影光路外に退避していたミラー33を駆動して元の位置に戻し、ステップS409に進む。
【0140】
ステップS409では、制御回路23は、絞り装置22を駆動するモータ160を制御して回転部材8を待機位置(絞り羽根1〜7の開放位置)まで駆動し、ステップS414に進む。このとき、モータ160の制御は、ステップS403の絞り込み駆動時と同様に第1の駆動制御モードで行われ、モータ160を絞り込み駆動時とは逆の図1の時計回り方向に回転させる。なお、モータ160の制御の詳細については、図1の時計回り方向に回転させる点を除き、ステップS403と同様であるので、説明を省略する。
【0141】
ステップS414では、制御回路23は、撮像素子24から読み込んだ電荷信号(画像データ)に対してデジタル変換処理や画像処理、画像圧縮処理等の所定の処理を行った後、記録部37によりメモリーカード等の記録媒体に記録する。これにより、光学ファインダモード(OVFモード)での静止画撮影処理ルーチンを終了する。
【0142】
一方、ステップS410では、制御回路23は、撮像素子24の露光を開始し、所定の露光時間(図11のステップS303で算出されたシャッタ速度)が終了すると、ステップS411に進む。
【0143】
ステップS411では、制御回路23は、シャッタ駆動回路26によりシャッタ装置27を駆動してシャッタを閉じ、ステップS412に進む。
【0144】
ステップS412では、制御回路23は、撮像素子24の蓄積を終了して露光を終了し、ステップS413に進む。
【0145】
ステップS413では、制御回路23は、シャッタ駆動回路26によりシャッタ装置27を駆動してシャッタを開き、ステップS414に進む。
【0146】
ステップS414では、制御回路23は、撮像素子24から読み込んだ電荷信号(画像データ)に対してデジタル変換処理や画像処理、画像圧縮処理等の所定の処理を行った後、記録部37によりメモリーカード等の記録媒体に記録する。これにより、電子ファインダモード(EVFモード)での静止画撮影処理ルーチンを終了する。
【0147】
次に、図13を参照して、図9のステップS113における動画撮影処理について説明する。
【0148】
まず、ステップS501では、制御回路23は、撮像素子24の露光を開始しステップS502に進む。
【0149】
ステップS502では、制御回路23は、動画の1フレーム毎に撮像素子24から電荷信号(画像データ)を読み出し、デジタル変換処理や画像処理、画像圧縮処理等の所定の処理を行った後、不図示のメモリに格納し、ステップS503に進む。
【0150】
ステップS503では、制御回路23は、ステップS502で読み込んだ画像データから算出したシャッタ速度と絞り値の演算結果を用いて、露出(AE)が適正か否かを判断する。そして、制御回路23は、露出が適正でない場合は、ステップS504に進んで、露出が適正と判断できるまで、絞り装置22を駆動するモータ160の制御と撮像素子24の電子シャッタとの組み合わせでAE制御を行う。
【0151】
このとき、モータ160の制御は、第2の駆動制御モードで行われる。すなわち、制御回路23は、非フィードバック通電切替ドライバ29により非フィードバック通電切替モードのみでモータ160のマイクロステップ駆動を行うことで、静かで滑らかなモータ駆動を行う。そして、制御回路23は、ステップS503で露出(AE)が適正になると、ステップS505に進む。
【0152】
ステップS505では、制御回路23は、SW2スイッチがONの状態であるか否かを判定し、ONの状態であれば、ステップS501に戻り、ONの状態でなければ、ステップS506に進む。
【0153】
ステップS506では、制御回路23は、撮像素子24の露光を終了し、ステップS507に進む。
【0154】
ステップS507では、制御回路23は、ステップS502でメモリに格納した動画像データを、記録部37によりメモリーカード等の記録媒体に記録し、動画撮影処理ルーチンを終了する。
【0155】
次に、図14を参照して、図9のステップS104における終了処理について説明する。
【0156】
まず、ステップS601では、制御回路23は、待機位置検出センサ12からの信号に基づき、回転部材8が待機位置(絞り羽根1〜7が開放位置)にあるか否かを判断する。そして、制御回路23は、回転部材8が待機位置にある場合は、ステップS603に進み、回転部材8が待機位置にない場合は、ステップS602に進む。
【0157】
ステップS602では、制御回路23は、モータ160を絞り方向とは逆方向に回転させる戻り駆動を行い、ステップS603に進む。戻り駆動は、第1の駆動制御モード(モータ160を、非フィードバック通電切替モードで駆動を開始してからフィードバック通電切替モードに切替えて駆動した後、再び非フィードバック通電切替モードに切替えて駆動して停止する)で行われる。
【0158】
ステップS603では、制御回路23は、ファインダモード切替部39の状態を確認する。そして、制御回路23は、確認の結果、光学ファインダモード(OVFモード)に設定されている場合は、終了処理ルーチンを終了し、電子ファインダモード(EVFモード)に設定されている場合は、ステップS604に進む。
【0159】
ステップS604では、制御回路23は、画像表示回路35により表示部36に表示されている被写体の画像データの表示を停止し、ステップS605に進む。
【0160】
ステップS605では、制御回路23は、シャッタ駆動回路26によりシャッタ装置27を駆動してシャッタを閉じ、ステップS606に進む。
【0161】
ステップS606では、制御回路23は、ミラー駆動回路32により撮影光路外に退避していたミラー33を駆動して元の位置に戻し、終了処理ルーチンを終了する。
【0162】
以上説明したように、本実施形態では、デジタルカメラの起動時に、撮影モードが動画モードの場合、或いは撮影モードが静止画モードでファインダモードが被写体像を表示部36に表示するEVFモードの場合に、第1の駆動制御モードでモータ160を駆動する。これにより、回転部材8(絞り羽根1〜7)を待機位置から撮影開始初期位置まで高速で駆動することができると共に、絞り羽根1〜7を撮影開始初期位置に精度よく停止させることができる。この結果、撮影準備の高速化が可能となり、撮影開始タイムラグを短縮することができるとともに、絞り口径精度を高めることができる。
【0163】
また、本実施形態では、デジタルカメラの起動時に回転部材8が待機位置にない場合は、第3の駆動制御モードでモータ160を高速で駆動して、回転部材8を待機位置まで回転させる。これにより、撮影準備の高速化が可能となり、撮影開始タイムラグを短縮することができる。
【0164】
更に、本実施形態では、ファインダモードをOVFモードからEVFモードへ切り替えた場合、第1の駆動制御モードでモータ160を駆動して回転部材8を待機位置から撮影開始初期位置まで駆動する。また、ファインダモードをEVFモードからOVFモードへ切り替えた際に回転部材8が待機位置にない場合は、第1の駆動制御モードでモータ160を駆動して回転部材8を待機位置から撮影開始初期位置まで駆動する。これにより、ファインダモード切替後の撮影開始タイムラグを短縮することができるとともに、絞り羽根1〜7を撮影開始初期位置に精度よく停止させて絞り口径精度を高めることができる。
【0165】
更に、本実施形態では、被写体の撮影中及び被写体像を表示部36に表示中は、モータ160を第2の駆動制御モードでマイクロステップ駆動するので、絞り羽根1〜7を静かで滑らかに開閉動作させることができる。
【0166】
更に、本実施形態では、電源OFF時には、第1の駆動制御モードでモータ160を駆動するので、終了時の迅速な処理が可能となる。
【0167】
なお、本発明の構成は、上記実施形態に例示したものに限定されるものではなく、材質、形状、寸法、形態、数、配置箇所等は、本発明の要旨を逸脱しない範囲において適宜変更可能である。
【符号の説明】
【0168】
1〜7 絞り羽根
8 回転部材
12 待機位置検出センサ
22 絞り装置
23 制御回路
28 フィードバック通電切替ドライバ
29 非フィードバック通電切替ドライバ
30 切替回路
160 モータ
171,172 ロータ位置検出センサ
【特許請求の範囲】
【請求項1】
被駆動部材を駆動するモータと、
前記モータのロータの回転位置を検出するロータ位置検出手段と、
前記ロータ位置検出手段による検出結果に従って前記モータのコイルへの通電方向を切り替えて前記モータを駆動する第1の駆動手段と、
入力された駆動パルス間隔に従って前記モータのコイルへの通電方向を切り替えて前記モータを駆動する第2の駆動手段と、
前記第1の駆動手段と前記第2の駆動手段とを切り替える切替手段と、
装置の起動時に前記被駆動部材を待機位置から撮影開始初期位置まで動作させる場合は、前記モータを前記第2の駆動手段で駆動を開始し、前記第1の駆動手段で駆動した後、再び前記第2の駆動手段で駆動して停止させるように前記切替手段を制御し、被写体の画像を表示部に表示している場合、及び被写体を撮影している場合は、前記第2の駆動手段のみで前記モータを駆動するように前記切替手段を制御する制御手段と、を備えることを特徴とする撮像装置。
【請求項2】
被写体像を前記表示部に表示する電子ファインダモードと被写体像を光学ファインダを通して観察する光学ファインダモードとを切り替えるファインダモード切替手段を備え、
前記制御手段は、前記ファインダモード切替手段によりファインダモードが切り替えられた際、前記モータを前記第2の駆動手段で駆動を開始し、前記第1の駆動手段で駆動した後、再び前記第2の駆動手段で駆動して停止させるように前記切替手段を制御する、ことを特徴とする請求項1に記載の撮像装置。
【請求項3】
前記被駆動部材が待機位置に配置されているか否かを検出する待機位置検出手段を備え、
前記制御手段は、装置の起動時に前記待機位置検出手段により前記被駆動部材が待機位置に配置されていないことが検出された場合、前記第1の駆動手段で前記モータを駆動して前記被駆動部材を待機位置に移動させるように前記切替手段を制御する、ことを特徴とする請求項1又は2に記載の撮像装置。
【請求項4】
前記制御手段は、装置の終了時に、前記モータを前記第2の駆動手段で駆動を開始し、前記第1の駆動手段で駆動した後、再び前記第2の駆動手段で駆動して停止させるように前記切替手段を制御する、ことを特徴とする請求項1に記載の撮像装置。
【請求項5】
前記被駆動部材は、複数の絞り羽根を開閉動作させる部材である、ことを特徴とする請求項1乃至4のいずれか一項に記載の撮像装置。
【請求項1】
被駆動部材を駆動するモータと、
前記モータのロータの回転位置を検出するロータ位置検出手段と、
前記ロータ位置検出手段による検出結果に従って前記モータのコイルへの通電方向を切り替えて前記モータを駆動する第1の駆動手段と、
入力された駆動パルス間隔に従って前記モータのコイルへの通電方向を切り替えて前記モータを駆動する第2の駆動手段と、
前記第1の駆動手段と前記第2の駆動手段とを切り替える切替手段と、
装置の起動時に前記被駆動部材を待機位置から撮影開始初期位置まで動作させる場合は、前記モータを前記第2の駆動手段で駆動を開始し、前記第1の駆動手段で駆動した後、再び前記第2の駆動手段で駆動して停止させるように前記切替手段を制御し、被写体の画像を表示部に表示している場合、及び被写体を撮影している場合は、前記第2の駆動手段のみで前記モータを駆動するように前記切替手段を制御する制御手段と、を備えることを特徴とする撮像装置。
【請求項2】
被写体像を前記表示部に表示する電子ファインダモードと被写体像を光学ファインダを通して観察する光学ファインダモードとを切り替えるファインダモード切替手段を備え、
前記制御手段は、前記ファインダモード切替手段によりファインダモードが切り替えられた際、前記モータを前記第2の駆動手段で駆動を開始し、前記第1の駆動手段で駆動した後、再び前記第2の駆動手段で駆動して停止させるように前記切替手段を制御する、ことを特徴とする請求項1に記載の撮像装置。
【請求項3】
前記被駆動部材が待機位置に配置されているか否かを検出する待機位置検出手段を備え、
前記制御手段は、装置の起動時に前記待機位置検出手段により前記被駆動部材が待機位置に配置されていないことが検出された場合、前記第1の駆動手段で前記モータを駆動して前記被駆動部材を待機位置に移動させるように前記切替手段を制御する、ことを特徴とする請求項1又は2に記載の撮像装置。
【請求項4】
前記制御手段は、装置の終了時に、前記モータを前記第2の駆動手段で駆動を開始し、前記第1の駆動手段で駆動した後、再び前記第2の駆動手段で駆動して停止させるように前記切替手段を制御する、ことを特徴とする請求項1に記載の撮像装置。
【請求項5】
前記被駆動部材は、複数の絞り羽根を開閉動作させる部材である、ことを特徴とする請求項1乃至4のいずれか一項に記載の撮像装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−2985(P2012−2985A)
【公開日】平成24年1月5日(2012.1.5)
【国際特許分類】
【出願番号】特願2010−137016(P2010−137016)
【出願日】平成22年6月16日(2010.6.16)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成24年1月5日(2012.1.5)
【国際特許分類】
【出願日】平成22年6月16日(2010.6.16)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]