
撮像装置
【課題】 長期間の連続使用環境下で、精度の高いパンニング機構を実現する。
【解決手段】 カメラユニット4の両側に設けたチルト軸9、10のそれぞれを、パンニング基台2上に立設された第1、第2支柱部5、6の軸受部に組込む。一方の第1支柱部5内にチルト駆動機構を組込み、他方の第2支柱部6内にエンコーダ機構による光学センサを構成することで、駆動機構と隔離された空間内に、大直径のパターン板を用いたエンコーダ機構を実現する。
【解決手段】 カメラユニット4の両側に設けたチルト軸9、10のそれぞれを、パンニング基台2上に立設された第1、第2支柱部5、6の軸受部に組込む。一方の第1支柱部5内にチルト駆動機構を組込み、他方の第2支柱部6内にエンコーダ機構による光学センサを構成することで、駆動機構と隔離された空間内に、大直径のパターン板を用いたエンコーダ機構を実現する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば遠隔的に使用する撮像装置に関するものである。
【背景技術】
【0002】
監視カメラは長期間連続で運用することや、正確な動作を長期間保証される必要がある。1個のカメラで複数の個所をモニタする監視カメラは、パンニングやチルティングの回転停止位置精度を長期間保証できることが重要である。これに対して、工作機械に用いられる駆動系にサーボ制御のモータを使用して、モータ回転数を正確に保持することで、回転停止位置精度を保証する方法を用いることが考えられる。
【0003】
また、一方で特許文献1などに開示されているように、光学式、磁気式のエンコーダなどをパンニング及びチルティングの回転軸に直接取り付けて、回転対象の絶対回転位置を検出する方法が開示されている。この方式はモータの回転数を監視する方法に対して回路構成等が簡易であり、モータからパンニング軸、チルティング軸のような回転角検出対象の回転軸までの動力伝達機構のがたや、バックラッシに対する補正の必要がない優れた方式である。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−156855号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、その反面で回転角検出対象の回転数と、エンコーダの回転数倍率が1対1となるために、エンコーダ自体の検出分解能を高くしなければならないという課題がある。その対策として、エンコーダのパターン板上のパターンピッチを細かくして対応する方法が考えられるが、より高いパターンの読取精度が要求されることになる。これにより、読取エラーに対するマージンが狭くなり、部品精度や環境変化耐性への要求が厳しくなり、検出品質を維持することが難しくなる。
【0006】
第2の対策として、パターン板の径を大きくすることで、パターンピッチを細かくすることなく、単位角度当たりのパターン数を増やす方法が考えられ、前者の対策よりも検出品質の維持が容易となる。一方で、特許文献1に示されるように、駆動機構の付近にパターン板を構成すると、パターン板が大きくなることにより駆動機構周りの構造が大型化する。
【0007】
更に、駆動機構周辺にエンコーダを配置した場合には、歯車や軸受けなどに塗布された油脂類や磨耗粉の駆動時の飛び散りや、油脂塗布時の付着などでパターン板の汚染の危険性があり、エンコーダの読取エラーの危険要因として無視できない。
【0008】
本発明の目的は、上述の課題を解消した簡易な構成で、長期間の連続使用の下でも、雲台の回転位置精度が維持可能な撮像装置を提供することにある。
【課題を解決するための手段】
【0009】
上記目的を達成するための本発明に係る撮像装置は、撮像光学系を含むカメラユニットと、前記カメラユニットの両側を支持する第1及び第2の支柱部と、前記第1及び第2の支柱部が設けられた固定部と、前記カメラユニットを所定の方向に回転させる回転駆動手段と、前記回転駆動手段により回転させられたカメラユニットの方向を検知する方向検知手段と、を備える撮像装置であって、前記回転駆動手段は、前記第1支柱部の前記カメラユニットに面する側とは反対側に配置され、前記方向検知手段は、前記第2支柱部の前記カメラユニットに面する側とは反対側に配置されることを特徴とする。
【発明の効果】
【0010】
本発明に係る撮像装置によれば、第1支柱部に駆動機構を配置し、第2支柱部にセンサ機構を配置したので、それぞれが干渉することなく作動し、雲台の回転位置精度の維持が可能となる。
【図面の簡単な説明】
【0011】
【図1】監視カメラの斜視図である。
【図2】正面方向から見た断面図である。
【図3】第1支柱部の側面方向から見た断面図である。
【図4】第2支柱部の側面方向から見た断面図である。
【図5】制御系のブロック回路構成図である。
【図6】動作フローチャート図である。
【発明を実施するための形態】
【0012】
本発明を図示の実施例に基づいて詳細に説明する。
【0013】
図1は可動雲台付き監視カメラ装置の斜視図である。固定部1上に、パンニング可動部であるパンニング基台2が水平回転(パンニング)可能に載置されている。パンニング基台2上には、レンズユニット3を備えたカメラユニット4を挟み込む第1支柱部5と第2支柱部6が立設され、カメラユニット4はパンニング基台2に対して垂直回転(チルティング)可能とされている。カメラユニット4の第1支柱部5、第2支柱部6に面する部分にはチルト軸が設置され、これらのチルト軸が第1支柱部5と第2支柱部6に設けられた軸受部に嵌合されている。
【0014】
また、カメラユニット4にはケーシングカバー4aが設けられ、第1支柱部5、第2支柱部6にはそれぞれカバー5a、6aが取り付けられている。
【0015】
図2は図1の前方から見た断面図であり、一部の公知のものや、説明上不要で図が煩雑になるものは省略している。カメラユニット4には、レンズユニット3と第1電気回路基板7が内蔵され、第1電気回路基板7は図示しない板金や樹脂材などの構造体により固定されている。レンズユニット3は公知の撮像光学系と撮像素子とから構成され、撮像素子と第1電気回路基板7とは信号ケーブル8により接続されており、第1電気回路基板7、電気処理回路を経て撮像した画像を出力するようになっている。
【0016】
カメラユニット4の両側には、第1チルト軸9と第2チルト軸10が外側に突出して設けられており、第1支柱部5の軸受部5bと、第2支柱部6の軸受部6bにより回動可能に支持されている。第1支柱部5側の第1チルト軸9には、ウォームホイール11がねじ12により固定されている。ウォームホイール11はステップモータ13の動力を基にウォーム14により回転して、第1チルト軸9及びカメラユニット4をチルト方向に回動させる。
【0017】
ここで、ステップモータ13の動力はモータピニオン15からウォーム14に同軸に構成されたプーリ16、ベルト17により伝達されて、ウォーム14を回転させる。ステップモータ13には、電線18を経由して図示しない公知の電気的接続手段を介して電力及び制御指令が与えられる。
【0018】
図3は第1支柱部5の断面図である。ウォーム14、プーリ16、ベルト17、モータピニオン15、ステップモータ13が構造基板19上に固定され、第1支柱部5にねじ20などで固定されている。
【0019】
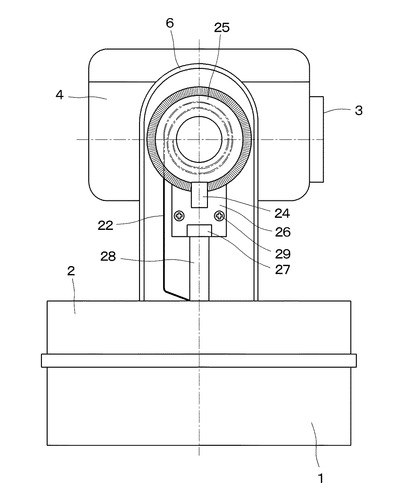
図2において、第2支柱部6側には第2チルト軸10が嵌合している。第2チルト軸10は中空で、後述する固定部1内の第2電気回路基板21に接続する電線22をカメラユニット4の内部を通過させ、第1電気回路基板7にコネクタ23を介して接続されている。これにより、第1電気回路基板7と第2電気回路基板21とが電気的に接続される。なお、電線22はカメラユニット4の回転によって断線しないように、第2チルト軸10の周りに渦巻状に数回巻かれた後に、第2チルト軸10内に導入されている。
【0020】
第2チルト軸10の先端付近には光学センサ24が設けられ、光学センサ24は発光部と受光部の対が単数又は複数配列されており、発光部と受光部によって第2チルト軸10と共に回転するパターン板25を挟むように設置されている。パターン板25は透明な材質で製作された円板であり、周辺部表面に360dpiなどの所定の間隔で黒線によるパターンが例えば放射状に印刷されている。
【0021】
光学センサ24の発光部から発した光が、パターン板25の黒線により所定時間に何回遮光されるかを計数することで、パターン板25の回転角度と回転速度を検出することが可能である。光学センサ24はセンサ電気基板26に実装され、同じ電気基板26上に実装されているコネクタ27を介して、第2電気回路基板21と接続する電線28と接続されている。これにより、光学センサ24は第2電気回路基板21による電源及び制御指令を受け、第2電気回路基板21は光学センサ24によるチルト回転駆動の回転量の角度検知を行う。
【0022】
図4は第2支柱部6の断面図である。センサ電気基板26はねじ29などで第2支柱部6に固定されている。
【0023】
固定部1においては、機構台31が固定部1にねじ32などで固定されている。パン軸受け33が機構台31にねじ34で固定され、パンニング基台2の鉛直方向を向くパン軸35が回転可能に嵌合されている。
【0024】
これにより、パンニング基台2は固定部1に対して水平に回転可能に接合され、パン軸35はリング36によって抜け止めが施されている。ウォームホイール37はパン軸35と同軸となるように、パンニング基台2にねじ38などで固定されている。ウォームホイール37はステップモータ39の動力により回転するウォーム40により駆動され、パンニング基台2を回転運動させる。ウォーム40、プーリ41、ベルト42、モータピニオン43、ステップモータ39は、図3に示す構造基板44上に構成され、機構台31にねじ45により固定されている。
【0025】
ステップモータ39の動力はモータピニオン43からウォーム40に同軸に構成されたプーリ41に、ベルト42で伝達されてウォーム40を回転させる。ステップモータ39には、後述する第2電気回路基板21に接続する電線18を経由して、電気基板、フレキシブル基板、コネクタなどの図示しない公知の電気的接続手段により電力及び制御指令が与えられる。
【0026】
固定部1に固設された機構台31には、電源や制御回路、内部配線用コネクタ、各種の外部インタフェイスなどが実装された第2電気回路基板21がねじ51により固定されている。外部インタフェイスとしては、電源入力端子52、画像出力ポート53、外部制御通信ポート54などがある。
【0027】
フレキシブル配線から成る電線群55はパンニング基台2の回転により断線しないように、前述のパン軸受け33の周りに渦巻状に数回巻かれた状態で、電線ケース56内に設置されている。電線群55の下端は電線ケース56から下方に配線されて、電気的接続手段によって第2電気回路基板21に接続されている。電線群55の上端は電線ケース56から上方に配線され、電線18、22、28などに分岐して前述の各所に配線されている。
【0028】
電磁波シールド機能を有する上ケース57と下ケース58が機構台31に固定されて、第2電気回路基板21を上下から覆っている。上ケース57と下ケース58は、第2電気回路基板21から発生する電磁波を外部に漏洩しないように遮蔽する機能を有している。
【0029】
機構台31にセンサ電気基板61が固定され、センサ電気基板61に光学センサ62とコネクタ63が実装され、センサ電気基板61は上ケース57の一部を通り抜けて、第2電気回路基板21の付近まで突出されている。光学センサ62は前述の光学センサ24と同様に、パターン板64を挟み込むように設置されている。パン軸35が上ケース57の一部を通り抜けて第2電気回路基板21の付近まで延長され、その先端にパターン板64がねじ65によって固設されている。パターン板64はパターン板25と同様に透明な部材で製作されており、周辺部表面に所定の間隔で黒線によるパターンが印刷されている。コネクタ63と第2電気回路基板21上のコネクタ66とは電線67により接続されている。
【0030】
光学センサ62はコネクタ63を介して第2電気回路基板21と接続して電源及び制御指令を受け、第2電気回路基板21は光学センサ62からの信号検知を行う。これにより、パンニング基台2の回転角度と回転速度の検知を行う。
【0031】
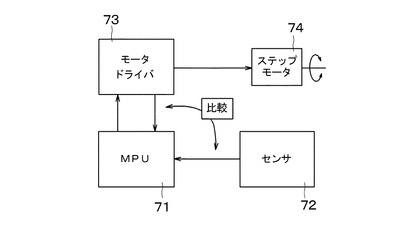
図5は制御系のブロック回路構成図である。第2電気回路基板21上に構成されたMPU(メインプロセッサユニット)71には光学センサ24、62から成るセンサ72の出力が接続されている。また、MPU71はモータドライバ73に接続され、モータドライバ73のパルス出力は、ステップモータ13、39から成るステップモータ74に接続されている。
【0032】
外部制御通信ポート54から受けた回転制御命令又は内部的にプログラムされた制御命令により、MPU71はモータドライバ73を制御してステップモータ74に所定数の電力パルスを与えて駆動する。これにより、チルト軸やパン軸の回転を検知しているセンサ72の検出パルスmがMPU71に入力されて、モータドライバ73の出力パルスnと比較される。
【0033】
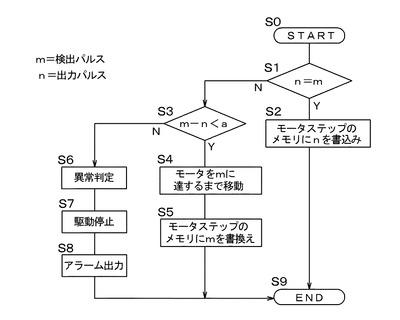
図6は動作フローチャート図である。MPU71がモータドライバ73の出力パルスnとセンサ72の検出パルスmを比較する。m=nの場合(ステップS1)は、正常な動作をしたものとしてステップモータ74の動き量として出力パルスnをメモリに書き込む(ステップS2)。m−nの値が設定された所定量aよりも少ない場合(ステップS3)には、検出パルスmとなるまでステップモータ74を駆動して(ステップS4)、ステップモータ74の動き量として検出パルスmをメモリに書き込む(ステップS5)。
【0034】
m−nの値が設定された所定量aより多い場合(ステップS3)には、異常が生じたと判定してステップモータ74の駆動を停止して警報を出力する(ステップS7、S8)。
【0035】
本実施例では、一方の第1支柱部5側に駆動機構、他方の第2支柱部6側にセンサ構造を配置したが、逆の配置であっても問題はない。また、モータはステップモータでなく、DC、ACモータを用いて角度センサによるフィードバック制御を行うこともできる。
【0036】
パターン板25、64のパターンを黒(遮蔽)と透明(透過)などのデジタル的なパターンではなく、連続的な濃度変化を有するものにして、透過率の連続的変化を検出することによって、絶対位置を検出するポテンションメータを構成してもよい。また、反射型のパターン板を使用することもできる。
【0037】
更に、第1支柱部5、第2支柱部6は何れを右側又は左側に配置してもよい。
【0038】
以上の説明では、本発明の好ましい実施例について述べたが、本発明は実施例に限定されないことは云うまでもなく、その要旨の範囲内で種々の変形及び変更が可能である。
【符号の説明】
【0039】
1 固定部
2 パンニング基台
3 レンズユニット
4 カメラユニット
5、6 支柱部
7、21 電気回路基板
9、10 チルト軸
13、39 ステップモータ
24、62 光学センサ
25、64 パターン板
71 MPU
【技術分野】
【0001】
本発明は、例えば遠隔的に使用する撮像装置に関するものである。
【背景技術】
【0002】
監視カメラは長期間連続で運用することや、正確な動作を長期間保証される必要がある。1個のカメラで複数の個所をモニタする監視カメラは、パンニングやチルティングの回転停止位置精度を長期間保証できることが重要である。これに対して、工作機械に用いられる駆動系にサーボ制御のモータを使用して、モータ回転数を正確に保持することで、回転停止位置精度を保証する方法を用いることが考えられる。
【0003】
また、一方で特許文献1などに開示されているように、光学式、磁気式のエンコーダなどをパンニング及びチルティングの回転軸に直接取り付けて、回転対象の絶対回転位置を検出する方法が開示されている。この方式はモータの回転数を監視する方法に対して回路構成等が簡易であり、モータからパンニング軸、チルティング軸のような回転角検出対象の回転軸までの動力伝達機構のがたや、バックラッシに対する補正の必要がない優れた方式である。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−156855号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、その反面で回転角検出対象の回転数と、エンコーダの回転数倍率が1対1となるために、エンコーダ自体の検出分解能を高くしなければならないという課題がある。その対策として、エンコーダのパターン板上のパターンピッチを細かくして対応する方法が考えられるが、より高いパターンの読取精度が要求されることになる。これにより、読取エラーに対するマージンが狭くなり、部品精度や環境変化耐性への要求が厳しくなり、検出品質を維持することが難しくなる。
【0006】
第2の対策として、パターン板の径を大きくすることで、パターンピッチを細かくすることなく、単位角度当たりのパターン数を増やす方法が考えられ、前者の対策よりも検出品質の維持が容易となる。一方で、特許文献1に示されるように、駆動機構の付近にパターン板を構成すると、パターン板が大きくなることにより駆動機構周りの構造が大型化する。
【0007】
更に、駆動機構周辺にエンコーダを配置した場合には、歯車や軸受けなどに塗布された油脂類や磨耗粉の駆動時の飛び散りや、油脂塗布時の付着などでパターン板の汚染の危険性があり、エンコーダの読取エラーの危険要因として無視できない。
【0008】
本発明の目的は、上述の課題を解消した簡易な構成で、長期間の連続使用の下でも、雲台の回転位置精度が維持可能な撮像装置を提供することにある。
【課題を解決するための手段】
【0009】
上記目的を達成するための本発明に係る撮像装置は、撮像光学系を含むカメラユニットと、前記カメラユニットの両側を支持する第1及び第2の支柱部と、前記第1及び第2の支柱部が設けられた固定部と、前記カメラユニットを所定の方向に回転させる回転駆動手段と、前記回転駆動手段により回転させられたカメラユニットの方向を検知する方向検知手段と、を備える撮像装置であって、前記回転駆動手段は、前記第1支柱部の前記カメラユニットに面する側とは反対側に配置され、前記方向検知手段は、前記第2支柱部の前記カメラユニットに面する側とは反対側に配置されることを特徴とする。
【発明の効果】
【0010】
本発明に係る撮像装置によれば、第1支柱部に駆動機構を配置し、第2支柱部にセンサ機構を配置したので、それぞれが干渉することなく作動し、雲台の回転位置精度の維持が可能となる。
【図面の簡単な説明】
【0011】
【図1】監視カメラの斜視図である。
【図2】正面方向から見た断面図である。
【図3】第1支柱部の側面方向から見た断面図である。
【図4】第2支柱部の側面方向から見た断面図である。
【図5】制御系のブロック回路構成図である。
【図6】動作フローチャート図である。
【発明を実施するための形態】
【0012】
本発明を図示の実施例に基づいて詳細に説明する。
【0013】
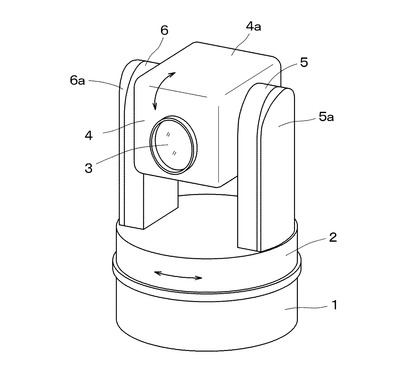
図1は可動雲台付き監視カメラ装置の斜視図である。固定部1上に、パンニング可動部であるパンニング基台2が水平回転(パンニング)可能に載置されている。パンニング基台2上には、レンズユニット3を備えたカメラユニット4を挟み込む第1支柱部5と第2支柱部6が立設され、カメラユニット4はパンニング基台2に対して垂直回転(チルティング)可能とされている。カメラユニット4の第1支柱部5、第2支柱部6に面する部分にはチルト軸が設置され、これらのチルト軸が第1支柱部5と第2支柱部6に設けられた軸受部に嵌合されている。
【0014】
また、カメラユニット4にはケーシングカバー4aが設けられ、第1支柱部5、第2支柱部6にはそれぞれカバー5a、6aが取り付けられている。
【0015】
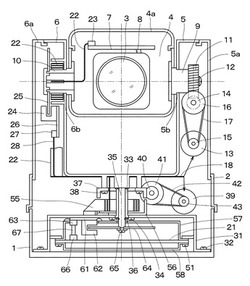
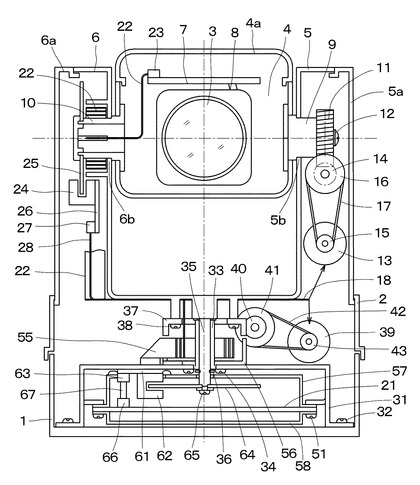
図2は図1の前方から見た断面図であり、一部の公知のものや、説明上不要で図が煩雑になるものは省略している。カメラユニット4には、レンズユニット3と第1電気回路基板7が内蔵され、第1電気回路基板7は図示しない板金や樹脂材などの構造体により固定されている。レンズユニット3は公知の撮像光学系と撮像素子とから構成され、撮像素子と第1電気回路基板7とは信号ケーブル8により接続されており、第1電気回路基板7、電気処理回路を経て撮像した画像を出力するようになっている。
【0016】
カメラユニット4の両側には、第1チルト軸9と第2チルト軸10が外側に突出して設けられており、第1支柱部5の軸受部5bと、第2支柱部6の軸受部6bにより回動可能に支持されている。第1支柱部5側の第1チルト軸9には、ウォームホイール11がねじ12により固定されている。ウォームホイール11はステップモータ13の動力を基にウォーム14により回転して、第1チルト軸9及びカメラユニット4をチルト方向に回動させる。
【0017】
ここで、ステップモータ13の動力はモータピニオン15からウォーム14に同軸に構成されたプーリ16、ベルト17により伝達されて、ウォーム14を回転させる。ステップモータ13には、電線18を経由して図示しない公知の電気的接続手段を介して電力及び制御指令が与えられる。
【0018】
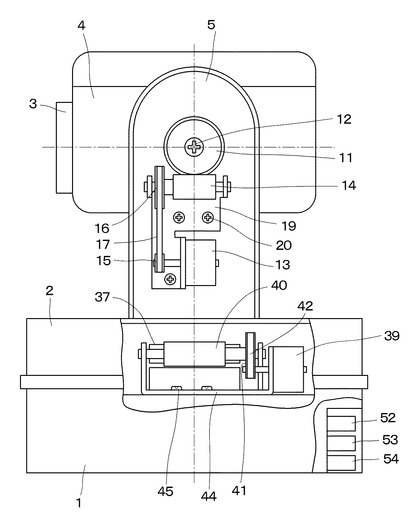
図3は第1支柱部5の断面図である。ウォーム14、プーリ16、ベルト17、モータピニオン15、ステップモータ13が構造基板19上に固定され、第1支柱部5にねじ20などで固定されている。
【0019】
図2において、第2支柱部6側には第2チルト軸10が嵌合している。第2チルト軸10は中空で、後述する固定部1内の第2電気回路基板21に接続する電線22をカメラユニット4の内部を通過させ、第1電気回路基板7にコネクタ23を介して接続されている。これにより、第1電気回路基板7と第2電気回路基板21とが電気的に接続される。なお、電線22はカメラユニット4の回転によって断線しないように、第2チルト軸10の周りに渦巻状に数回巻かれた後に、第2チルト軸10内に導入されている。
【0020】
第2チルト軸10の先端付近には光学センサ24が設けられ、光学センサ24は発光部と受光部の対が単数又は複数配列されており、発光部と受光部によって第2チルト軸10と共に回転するパターン板25を挟むように設置されている。パターン板25は透明な材質で製作された円板であり、周辺部表面に360dpiなどの所定の間隔で黒線によるパターンが例えば放射状に印刷されている。
【0021】
光学センサ24の発光部から発した光が、パターン板25の黒線により所定時間に何回遮光されるかを計数することで、パターン板25の回転角度と回転速度を検出することが可能である。光学センサ24はセンサ電気基板26に実装され、同じ電気基板26上に実装されているコネクタ27を介して、第2電気回路基板21と接続する電線28と接続されている。これにより、光学センサ24は第2電気回路基板21による電源及び制御指令を受け、第2電気回路基板21は光学センサ24によるチルト回転駆動の回転量の角度検知を行う。
【0022】
図4は第2支柱部6の断面図である。センサ電気基板26はねじ29などで第2支柱部6に固定されている。
【0023】
固定部1においては、機構台31が固定部1にねじ32などで固定されている。パン軸受け33が機構台31にねじ34で固定され、パンニング基台2の鉛直方向を向くパン軸35が回転可能に嵌合されている。
【0024】
これにより、パンニング基台2は固定部1に対して水平に回転可能に接合され、パン軸35はリング36によって抜け止めが施されている。ウォームホイール37はパン軸35と同軸となるように、パンニング基台2にねじ38などで固定されている。ウォームホイール37はステップモータ39の動力により回転するウォーム40により駆動され、パンニング基台2を回転運動させる。ウォーム40、プーリ41、ベルト42、モータピニオン43、ステップモータ39は、図3に示す構造基板44上に構成され、機構台31にねじ45により固定されている。
【0025】
ステップモータ39の動力はモータピニオン43からウォーム40に同軸に構成されたプーリ41に、ベルト42で伝達されてウォーム40を回転させる。ステップモータ39には、後述する第2電気回路基板21に接続する電線18を経由して、電気基板、フレキシブル基板、コネクタなどの図示しない公知の電気的接続手段により電力及び制御指令が与えられる。
【0026】
固定部1に固設された機構台31には、電源や制御回路、内部配線用コネクタ、各種の外部インタフェイスなどが実装された第2電気回路基板21がねじ51により固定されている。外部インタフェイスとしては、電源入力端子52、画像出力ポート53、外部制御通信ポート54などがある。
【0027】
フレキシブル配線から成る電線群55はパンニング基台2の回転により断線しないように、前述のパン軸受け33の周りに渦巻状に数回巻かれた状態で、電線ケース56内に設置されている。電線群55の下端は電線ケース56から下方に配線されて、電気的接続手段によって第2電気回路基板21に接続されている。電線群55の上端は電線ケース56から上方に配線され、電線18、22、28などに分岐して前述の各所に配線されている。
【0028】
電磁波シールド機能を有する上ケース57と下ケース58が機構台31に固定されて、第2電気回路基板21を上下から覆っている。上ケース57と下ケース58は、第2電気回路基板21から発生する電磁波を外部に漏洩しないように遮蔽する機能を有している。
【0029】
機構台31にセンサ電気基板61が固定され、センサ電気基板61に光学センサ62とコネクタ63が実装され、センサ電気基板61は上ケース57の一部を通り抜けて、第2電気回路基板21の付近まで突出されている。光学センサ62は前述の光学センサ24と同様に、パターン板64を挟み込むように設置されている。パン軸35が上ケース57の一部を通り抜けて第2電気回路基板21の付近まで延長され、その先端にパターン板64がねじ65によって固設されている。パターン板64はパターン板25と同様に透明な部材で製作されており、周辺部表面に所定の間隔で黒線によるパターンが印刷されている。コネクタ63と第2電気回路基板21上のコネクタ66とは電線67により接続されている。
【0030】
光学センサ62はコネクタ63を介して第2電気回路基板21と接続して電源及び制御指令を受け、第2電気回路基板21は光学センサ62からの信号検知を行う。これにより、パンニング基台2の回転角度と回転速度の検知を行う。
【0031】
図5は制御系のブロック回路構成図である。第2電気回路基板21上に構成されたMPU(メインプロセッサユニット)71には光学センサ24、62から成るセンサ72の出力が接続されている。また、MPU71はモータドライバ73に接続され、モータドライバ73のパルス出力は、ステップモータ13、39から成るステップモータ74に接続されている。
【0032】
外部制御通信ポート54から受けた回転制御命令又は内部的にプログラムされた制御命令により、MPU71はモータドライバ73を制御してステップモータ74に所定数の電力パルスを与えて駆動する。これにより、チルト軸やパン軸の回転を検知しているセンサ72の検出パルスmがMPU71に入力されて、モータドライバ73の出力パルスnと比較される。
【0033】
図6は動作フローチャート図である。MPU71がモータドライバ73の出力パルスnとセンサ72の検出パルスmを比較する。m=nの場合(ステップS1)は、正常な動作をしたものとしてステップモータ74の動き量として出力パルスnをメモリに書き込む(ステップS2)。m−nの値が設定された所定量aよりも少ない場合(ステップS3)には、検出パルスmとなるまでステップモータ74を駆動して(ステップS4)、ステップモータ74の動き量として検出パルスmをメモリに書き込む(ステップS5)。
【0034】
m−nの値が設定された所定量aより多い場合(ステップS3)には、異常が生じたと判定してステップモータ74の駆動を停止して警報を出力する(ステップS7、S8)。
【0035】
本実施例では、一方の第1支柱部5側に駆動機構、他方の第2支柱部6側にセンサ構造を配置したが、逆の配置であっても問題はない。また、モータはステップモータでなく、DC、ACモータを用いて角度センサによるフィードバック制御を行うこともできる。
【0036】
パターン板25、64のパターンを黒(遮蔽)と透明(透過)などのデジタル的なパターンではなく、連続的な濃度変化を有するものにして、透過率の連続的変化を検出することによって、絶対位置を検出するポテンションメータを構成してもよい。また、反射型のパターン板を使用することもできる。
【0037】
更に、第1支柱部5、第2支柱部6は何れを右側又は左側に配置してもよい。
【0038】
以上の説明では、本発明の好ましい実施例について述べたが、本発明は実施例に限定されないことは云うまでもなく、その要旨の範囲内で種々の変形及び変更が可能である。
【符号の説明】
【0039】
1 固定部
2 パンニング基台
3 レンズユニット
4 カメラユニット
5、6 支柱部
7、21 電気回路基板
9、10 チルト軸
13、39 ステップモータ
24、62 光学センサ
25、64 パターン板
71 MPU
【特許請求の範囲】
【請求項1】
撮像光学系を含むカメラユニットと、
前記カメラユニットの両側を支持する第1及び第2の支柱部と、
前記第1及び第2の支柱部が設けられた固定部と、
前記カメラユニットを所定の方向に回転させる回転駆動手段と、
前記回転駆動手段により回転させられたカメラユニットの方向を検知する方向検知手段と、
を備える撮像装置であって、
前記回転駆動手段は、前記第1支柱部の前記カメラユニットに面する側とは反対側に配置され、
前記方向検知手段は、前記第2支柱部の前記カメラユニットに面する側とは反対側に配置されることを特徴とする撮像装置。
【請求項2】
前記方向検知手段は、前記第2支柱部の内部に配置されることを特徴とする請求項1に記載の撮像装置。
【請求項3】
前記第2支柱部は、前記方向検知手段を覆うカバーが取り付けられることを特徴とする請求項1又は2に記載の撮像装置。
【請求項4】
前記回転駆動手段は、前記第1支柱部の内部に配置されることを特徴とする請求項1乃至3のいずれか1項に記載の撮像装置。
【請求項5】
前記第1支柱部は、前記回転駆動手段を覆うカバーが取り付けられることを特徴とする請求項1乃至4のいずれか1項に記載の撮像装置。
【請求項6】
前記回転駆動手段は、モータを含むことを特徴とする請求項1乃至5のいずれか1項に記載の撮像装置。
【請求項7】
前記方向検知手段は、透明または半透明のパターン板と、該パターン板のパターンを読み取る光学センサと、を含むことを特徴とする請求項1乃至6のいずれか1項に記載の撮像装置。
【請求項8】
前記方向検知手段は、ポテンションメータを含むことを特徴とする請求項1乃至7のいずれか1項に記載の撮像装置。
【請求項9】
前記所定の方向は、チルト方向であることを特徴とする請求項1乃至8のいずれか1項に記載の撮像装置。
【請求項1】
撮像光学系を含むカメラユニットと、
前記カメラユニットの両側を支持する第1及び第2の支柱部と、
前記第1及び第2の支柱部が設けられた固定部と、
前記カメラユニットを所定の方向に回転させる回転駆動手段と、
前記回転駆動手段により回転させられたカメラユニットの方向を検知する方向検知手段と、
を備える撮像装置であって、
前記回転駆動手段は、前記第1支柱部の前記カメラユニットに面する側とは反対側に配置され、
前記方向検知手段は、前記第2支柱部の前記カメラユニットに面する側とは反対側に配置されることを特徴とする撮像装置。
【請求項2】
前記方向検知手段は、前記第2支柱部の内部に配置されることを特徴とする請求項1に記載の撮像装置。
【請求項3】
前記第2支柱部は、前記方向検知手段を覆うカバーが取り付けられることを特徴とする請求項1又は2に記載の撮像装置。
【請求項4】
前記回転駆動手段は、前記第1支柱部の内部に配置されることを特徴とする請求項1乃至3のいずれか1項に記載の撮像装置。
【請求項5】
前記第1支柱部は、前記回転駆動手段を覆うカバーが取り付けられることを特徴とする請求項1乃至4のいずれか1項に記載の撮像装置。
【請求項6】
前記回転駆動手段は、モータを含むことを特徴とする請求項1乃至5のいずれか1項に記載の撮像装置。
【請求項7】
前記方向検知手段は、透明または半透明のパターン板と、該パターン板のパターンを読み取る光学センサと、を含むことを特徴とする請求項1乃至6のいずれか1項に記載の撮像装置。
【請求項8】
前記方向検知手段は、ポテンションメータを含むことを特徴とする請求項1乃至7のいずれか1項に記載の撮像装置。
【請求項9】
前記所定の方向は、チルト方向であることを特徴とする請求項1乃至8のいずれか1項に記載の撮像装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−101397(P2013−101397A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2013−27773(P2013−27773)
【出願日】平成25年2月15日(2013.2.15)
【分割の表示】特願2008−169245(P2008−169245)の分割
【原出願日】平成20年6月27日(2008.6.27)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成25年2月15日(2013.2.15)
【分割の表示】特願2008−169245(P2008−169245)の分割
【原出願日】平成20年6月27日(2008.6.27)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]